PROJET ORTRANS (I) Optimisation des Réseaux de …lmah.univ-lehavre.fr/~gueye/DOC/ortrans1.pdf ·...
36
PROJET ORTRANS (I) Optimisation des Réseaux de TRANsport du Sénégal : Analyse des flots et localisation d’activités Serigne Gueye, Université du Havre, Laboratoire de Mathématiques Appliquées du Havre, 25 rue Philippe Lebon, BP 540, 76058 Le Havre cedex (France). email : [email protected] Babacar Mbaye Ndiaye, Diaraf Seck Université Cheikh Anta Diop Laboratoire de Mathématiques de la Décision et d’Analyse Numérique (LMDAN) BP 45087 Dakar-Fann (Sénégal) email : [email protected],[email protected] 2006
Transcript of PROJET ORTRANS (I) Optimisation des Réseaux de …lmah.univ-lehavre.fr/~gueye/DOC/ortrans1.pdf ·...

PROJET ORTRANS (I)
Optimisation des Réseaux de TRANsport du Sénégal : Analysedes flots et localisation d’activités
Serigne Gueye,Université du Havre,
Laboratoire de Mathématiques Appliquées du Havre,25 rue Philippe Lebon, BP 540, 76058 Le Havre cedex (France).
email : [email protected]
Babacar Mbaye Ndiaye, Diaraf SeckUniversité Cheikh Anta Diop
Laboratoire de Mathématiques de la Décision et d’Analyse Numérique (LMDAN)BP 45087 Dakar-Fann (Sénégal)
email : [email protected],[email protected]
2006
Table des matières
1 Représentation du réseau de transport 6
2 Demandes origine-destination 12
3 Affectation des demandes origine-destination 153.1 Modèle d’équilibre usager . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 Modèle d’équilibre avec plusieurs modes de transport . . . . . . . . . . . . . 20
4 Dynamique de population 24
5 Localisation des activités 26
6 Exploitation des modèles 28
7 Plan de travail 30
8 Perspectives 33
Bibliographie 34
1
Introduction
Actuellement au Sénégal, et particulièrement à Dakar, l’augmentation croissante du nombrede véhicules (particuliers, transports en commun, camions de marchandises) en circulationa conduit à une congestion des circulations aussi insupportable humainement qu’inefficacesocio-économiquement. Sans être exhaustif, on peut citer parmi les conséquences négativesde ce phénoméne de congestion :
– les effets sur l’environnement et les individus dus à une atmosphère fortement polluée,– les difficultés et retards de livraison pour le transport de marchandises pénalisant toute
l’activité économique,– l’exaspération et le stress des usagers perdant la majeure partie de leur temps dans des
embouteillages interminables, et sa conséquence sur la productivité et la motivation sur lelieu de travail.
De nombreuses actions ont été initiées pour améliorer l’infrastructure de transport. Elles setraduisent par la construction de nouvelles routes, la reconfiguration de routes existantes, lapromotion des transports en commun, et dans une moindre mesure l’amélioration du systèmede signalisation routière. Nous pensons qu’aucune de ces alternatives ne peut cependant fairel’économie d’une recherche scientifique continue sur la gestion du réseau de transport. Fairecette économie, c’est risquer, après de coûteux investissements, d’accroître le problème initialqu’était censé solutionner l’alternative choisie.
Les décisions d’amélioration des infrastructures de transport sont prises pour satisfaire unedemande de transport dont il faut être en mesure d’évaluer les valeurs actuelles et les fluc-tuations dans le temps.
Une fois qu’un réseau est en place, il est nécessaire de mesurer sa qualité en étudiant l’écou-lement du trafic sur ce réseau. Cette étude permet de déceler des failles et d’y apporter descorrectifs. Etant donné des scénarios de réseau qui pourraient corriger ces failles, choisir le
2
TABLE DES MATIÈRES
meilleur parmi eux suppose de pouvoir prédire pour chacun comment le flot de véhicules s’yécoulera. Le meilleur scénario sera alors celui permettant l’écoulement le plus fluide. L’objec-tif du projet ORTRANS I est de proposer, d’implanter informatiquement, et de tester (parsimulation) des modèles de programmation mathématique répondant à ces enjeux.
Le trafic sur une zone urbaine est véritablement un problème complexe, à nombreux dé-terminants, qu’il est difficile de cerner dans son ensemble. Néammoins, dans l’analyse duproblème, il est indispensable d’en isoler certains. Même si ceux-ci ne couvrent pas l’en-semble du problème, ils permettent de l’analyser rationnellement, de proposer des modèles(certes simplifiant la réalité), et d’envisager, sur la base de ces modèles, des solutions et descritères de mesures quantifiables.
Le premier déterminant est la structure du réseau pour laquelle une représentation théoriqueest nécessaire. En se limitant aux véhicules particuliers, le réseau peut se représenter schéma-tiquement comme un graphe orienté dont chaque arc est une route de transport, et les noeudsdes intersections de routes. La représentation de l’aire urbaine est en réalité plus compliquéeque cela. En effet, à ce réseau initial peut se superposer plusieurs autres réseaux, relatifsaux transports en commun, qu’il est intéressant d’isoler dans l’étude pour une meilleurecompréhension du trafic. Dans le cas des réseaux de bus comportant des arrêts connus, desterminus, et des lignes de circulations, il suffira d’ajouter au réseau initial des noeuds et desarcs supplémentaires correspondants à ces éléments. En revanche, tous les modes de trans-port en commun, surtout dans le contexte africain, n’ont pas toujours une description aussirigoureuse que celle des bus avec arrêts fixes. Par exemple, les véhicules connus au Sénégalsous le nom de "cars rapides" ou "Ndiaga Ndiaye" n’ont aucun arrêt fixé mais des lignes decirculation connues et des terminus. Pour tenir compte du flot de ce type de trafic, on pourrase contenter d’ajouter des arcs, représentant les flots de ce mode, sans noeud supplémentaire.Nous détaillons la représentation graphique retenue du réseau de transport urbain, et desdivers modes de transport, dans le chapitre 1.
Le second déterminant concerne l’écoulement du flot de trafic sur le réseau représenté pré-cedemment. Ce flot, et la congestion qu’il peut générer, sont les résultantes de déplacementsdes usagers de diverses origines vers diverses destinations. En analyse des réseaux de trans-port, c’est ce qu’on appelle les demandes origine-destination, formalisées quantitativementpar une matrice origine-destination. Etant donné un réseau de transport et des demandesorigine-destination connues, savoir quels chemins vont être utilisés par les usagers permet deconnaitre les flots sur les différentes routes du réseau, et donc les charges qu’elles devrontsupporter. Déterminer les chemins origine-destination porte le nom d’affectation de trafic. Ils’agit d’affecter les demandes sur le réseau. Cette affectation dépend du comportement des
3
TABLE DES MATIÈRES
usagers dans leurs déplacements et du coût de chaque lien (route) de transport. Le coût esten général le temps de parcours. Il est fonction, entre autres, du degré de congestion sur lelien, mais également des délais induits par le fait qu’une route débouche sur une intersectionavec ou sans signalisation. Dans le cas d’une intersection avec signalisation, les cycles desfeux de signalisation joueront alors un rôle très important dans ce délai. Nous montrons auchapitre 3 comment l’affectation peut-être réalisée.
L’affectation de trafic suppose connues les demandes origine-destination dont la détermina-tion est non triviale. Les origines et les destinations sont des noeuds particuliers du graphereprésentant le réseau routier. De ce fait, ils sont étroitement liés à la répresentation du ré-seau, et plus exactement au niveau de précision de cette représentation ; ca peut être desquartiers entiers si l’on ne s’intéresse qu’à améliorer le trafic des grands axes routiers. Maisdans des représentations plus fines, il peut s’agir de zones plus petites. Selon le niveau dedécoupage de la zone urbaine, trouver les demandes origine-destination consiste à déterminerla quantité de véhicules, ou d’individus dans les transports en commun, par unité de temps, serendant d’une zone origine vers une zone destination. Nous montrons au chapitre 2 commentcela peut se calculer.
A ce stade d’analyse, nous disposons donc d’un réseau de transport, couplant véhicules par-ticuliers et transports en commun, et des demandes origine-destination qui ont été affectéesau réseau. Dans le cas d’un réseau existant, un moyen simple de vérifier la pertinence del’analyse est de comparer les flots trouvés avec la réalité du trafic grâce à des mesures deterrain. L’intérêt du travail d’analyse ne réside cependant pas dans sa capacité à reproduirela réalité actuelle, mais plutôt dans celle de prédire le comportement du réseau suivant dif-férents scénarios qui n’existent pas encore, afin de prendre les meilleures décisions. En effet,sachant que l’on sait comment affecter une demande sur un réseau donné, il est possible dedéterminer parmi un ensemble de scénarios de construction ou de reconfiguration de routescelui (ou ceux) permettant l’écoulement le plus fluide. Nous détaillons cet aspect dans lechapitre 6.
Les problèmatiques citées plus haut, particulièrement les demandes origine-destination, ontun caractère statique. En ce sens que la matrice origine-destination ne contient que des valeursconstantes. Un meilleur modèle consiste à prendre en compte la dynamique du problème ;en particulier, la dynamique urbaine susceptible de modifier significativement les demandes.L’apparition de nouveaux quartiers, les déplacements de population d’une zone vers uneautre, les taux de naissance et de mortalité sont autant de facteurs dynamiques influantles demandes de déplacement. Nous montrons, dans le chapitre 4, comment la dynamique
4
TABLE DES MATIÈRES
urbaine peut se formaliser, et comment ceci peut être exploité dans l’étude de scénarios deréseaux routiers.
Un autre aspect du problème qui n’apparait pas ci-dessus concerne la localisation des acti-vités d’une ville (quartiers, centres commerciaux, centres administratifs, hôpitaux, marchés,etc.). Les gens se déplacent pour accéder ou sortir de ces activités, et selon la manière dontelles sont placées, par rapport à la structure du réseau, ces déplacements peuvent être plusou moins difficiles à effectuer. La localisation des zones d’activités et le réseau de transportsont intimement liés. Les questions que l’on pourrait alors se poser sont de savoir commentles activités devraient être situées de facon à réduire au mieux les congestions sur le réseaude transport ?, quel serait (par exemple) l’impact sur le réseau de la relocalisation d’un mar-ché très fréquenté ou de divers centres administratifs dans d’autres zones ? Nous discutonsbriévement de cela au chapitre 5.
Toutes les problématiques citées sont l’objet du projet ORTRANS I. Les modèles que nousutiliserons, et sur lesquels des techniques de résolution numérique seront appliquées, reléventde la programmation mathématique. De telles méthodes ont déjà été proposées dans le passé(voir Sheffi [6]). L’analyse de réseau de transport reste encore à l’heure actuelle un domainede recherche actif surtout dans la prise en compte de la dynamique urbaine et dans l’aspectlocalisation d’activités ("land-use" dans la littérature). L’originalité de notre approche résidedans le fait que d’un point de vue pratique, c’est à notre connaissance la première applicationde ces outils à l’analyse du réseau urbain de Dakar. D’un point de vue théorique, l’originalitéréside dans les modèles de dynamique urbaine et de localisation d’activités utilisés.
5
Chapitre 1
Représentation du réseau de transport
La première étape dans la représentation du réseau consiste à décomposer l’aire urbaine enzones dites de trafic. Une zone de trafic est une zone d’où proviennent (origine) ou arrivent(destination) des demandes de transport. Selon le niveau de précision de l’étude du réseau,ces zones peuvent être des villes à l’intérieur d’une agglomération. Elles peuvent aussi re-grouper plusieurs quartiers, des bouts de différents quartiers, ou être des sous-ensembles dequartiers. Il n’y a pas à notre connaissance de critères rigoureux permettant de déterminerselon l’étude la meilleure décomposition zonale. L’exercice est à priori empirique et dépendfortement des routes, intersections, terminus et lignes de transport en commun que l’on désirefaire apparaitre dans la représentation. Chaque zone est matérialisée par un point, appelécentroïde, agrégeant en quelque sorte le trafic quittant ou arrivant dans cette zone.
Les centroïdes sont alors reliés par des connecteurs aux routes, intersections, terminus, ar-rêts de bus auxquels ils ont accès. Les routes, intersections, terminus, arrêts, centroïdes etconnecteurs constituent le réseau de transport. Ce réseau se représente naturellement sousla forme d’un multigraphe orienté dont les noeuds sont les intersections, terminus, arrêts oucentroïdes, et les arcs les routes et connecteurs. Pour distinguer, entre deux noeuds, le flotdes automobilistes de celui des transports en commun, deux types d’arcs correspondants àchaque mode de transport seront considérés. Ces arcs sont cependant relatifs physiquementà la même route.
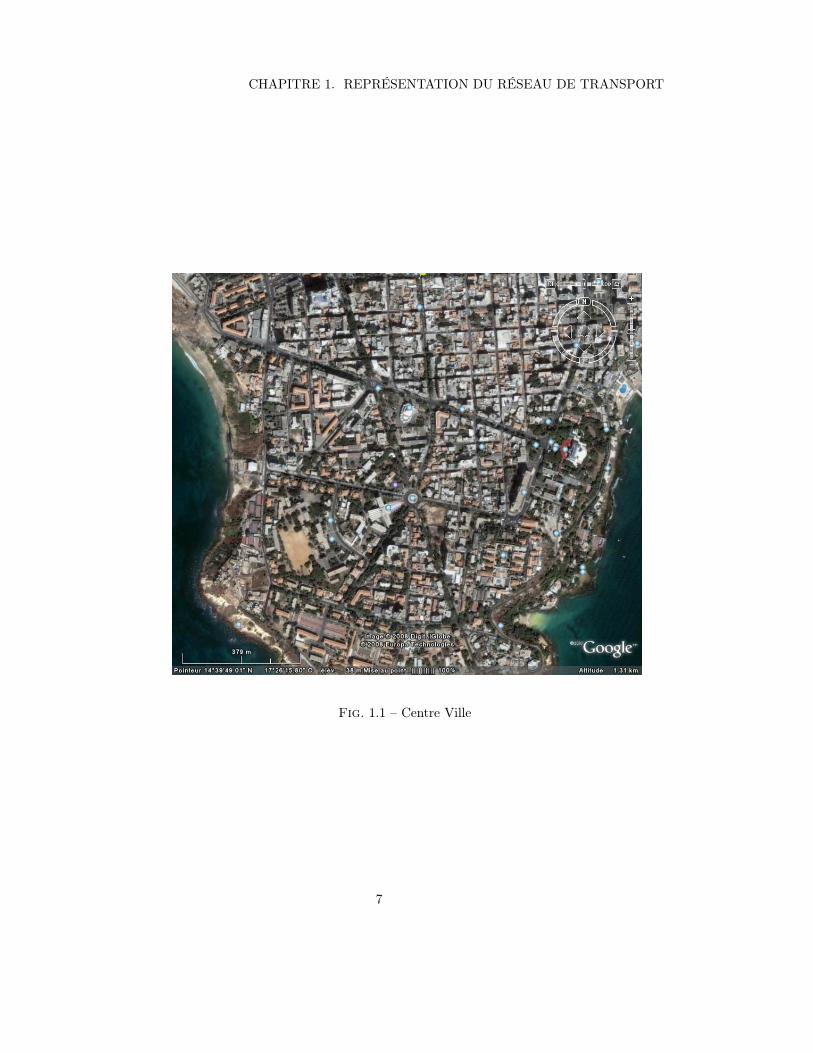
Illustrons à présent ce mécanisme de représentation sur l’image de la figure 1.1 d’une partiedu réseau urbain de Dakar (Image Google Earth - Centre ville de Dakar aux abords du palaisprésidentiel).
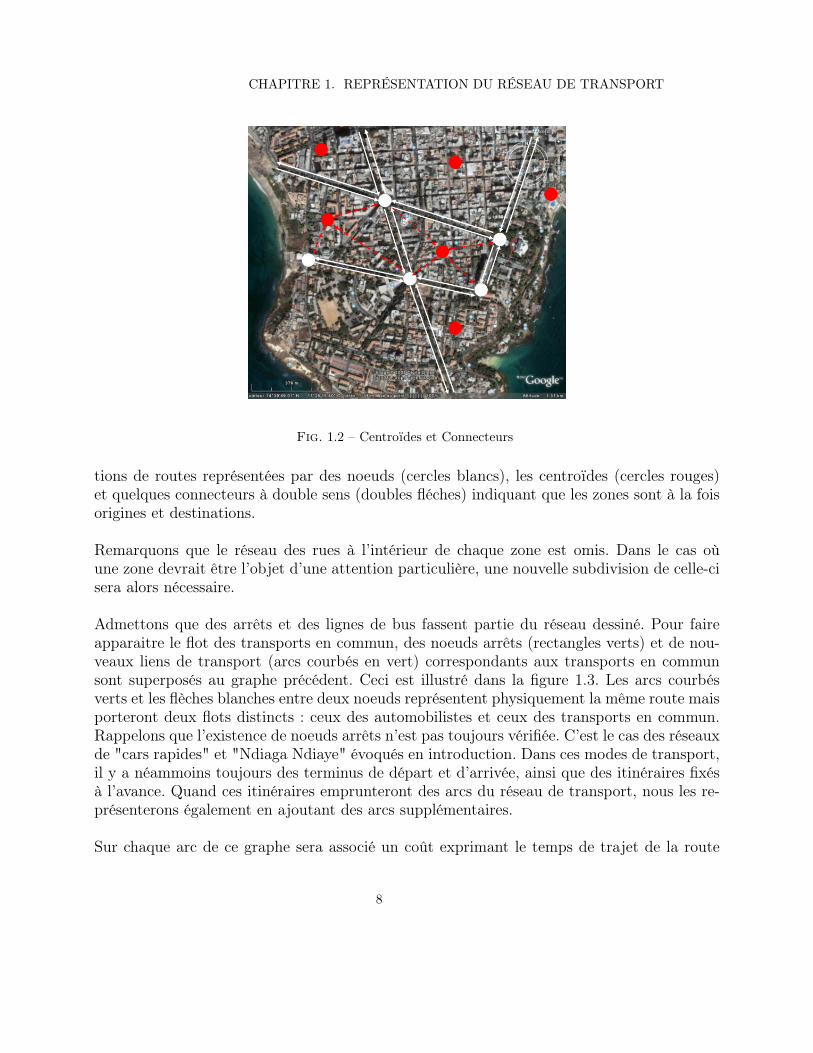
Une subdivision en zones origines et destinations de cette partie du réseau pourrait être cellede la figure 1.2. Nous y indiquons les routes représentées par des arcs blancs, les intersec-
6
CHAPITRE 1. REPRÉSENTATION DU RÉSEAU DE TRANSPORT
Fig. 1.1 – Centre Ville
7
CHAPITRE 1. REPRÉSENTATION DU RÉSEAU DE TRANSPORT
Fig. 1.2 – Centroïdes et Connecteurs
tions de routes représentées par des noeuds (cercles blancs), les centroïdes (cercles rouges)et quelques connecteurs à double sens (doubles fléches) indiquant que les zones sont à la foisorigines et destinations.
Remarquons que le réseau des rues à l’intérieur de chaque zone est omis. Dans le cas oùune zone devrait être l’objet d’une attention particulière, une nouvelle subdivision de celle-cisera alors nécessaire.
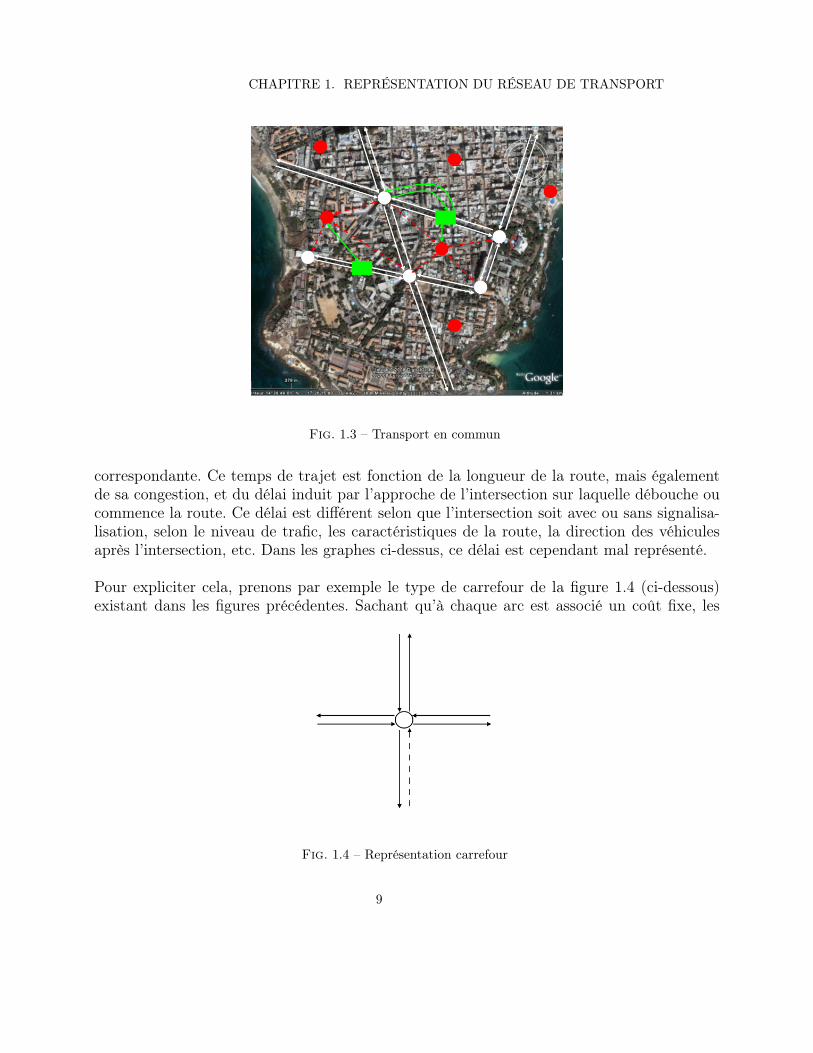
Admettons que des arrêts et des lignes de bus fassent partie du réseau dessiné. Pour faireapparaitre le flot des transports en commun, des noeuds arrêts (rectangles verts) et de nou-veaux liens de transport (arcs courbés en vert) correspondants aux transports en communsont superposés au graphe précédent. Ceci est illustré dans la figure 1.3. Les arcs courbésverts et les flèches blanches entre deux noeuds représentent physiquement la même route maisporteront deux flots distincts : ceux des automobilistes et ceux des transports en commun.Rappelons que l’existence de noeuds arrêts n’est pas toujours vérifiée. C’est le cas des réseauxde "cars rapides" et "Ndiaga Ndiaye" évoqués en introduction. Dans ces modes de transport,il y a néammoins toujours des terminus de départ et d’arrivée, ainsi que des itinéraires fixésà l’avance. Quand ces itinéraires emprunteront des arcs du réseau de transport, nous les re-présenterons également en ajoutant des arcs supplémentaires.
Sur chaque arc de ce graphe sera associé un coût exprimant le temps de trajet de la route
8
CHAPITRE 1. REPRÉSENTATION DU RÉSEAU DE TRANSPORT
Fig. 1.3 – Transport en commun
correspondante. Ce temps de trajet est fonction de la longueur de la route, mais égalementde sa congestion, et du délai induit par l’approche de l’intersection sur laquelle débouche oucommence la route. Ce délai est différent selon que l’intersection soit avec ou sans signalisa-lisation, selon le niveau de trafic, les caractéristiques de la route, la direction des véhiculesaprès l’intersection, etc. Dans les graphes ci-dessus, ce délai est cependant mal représenté.
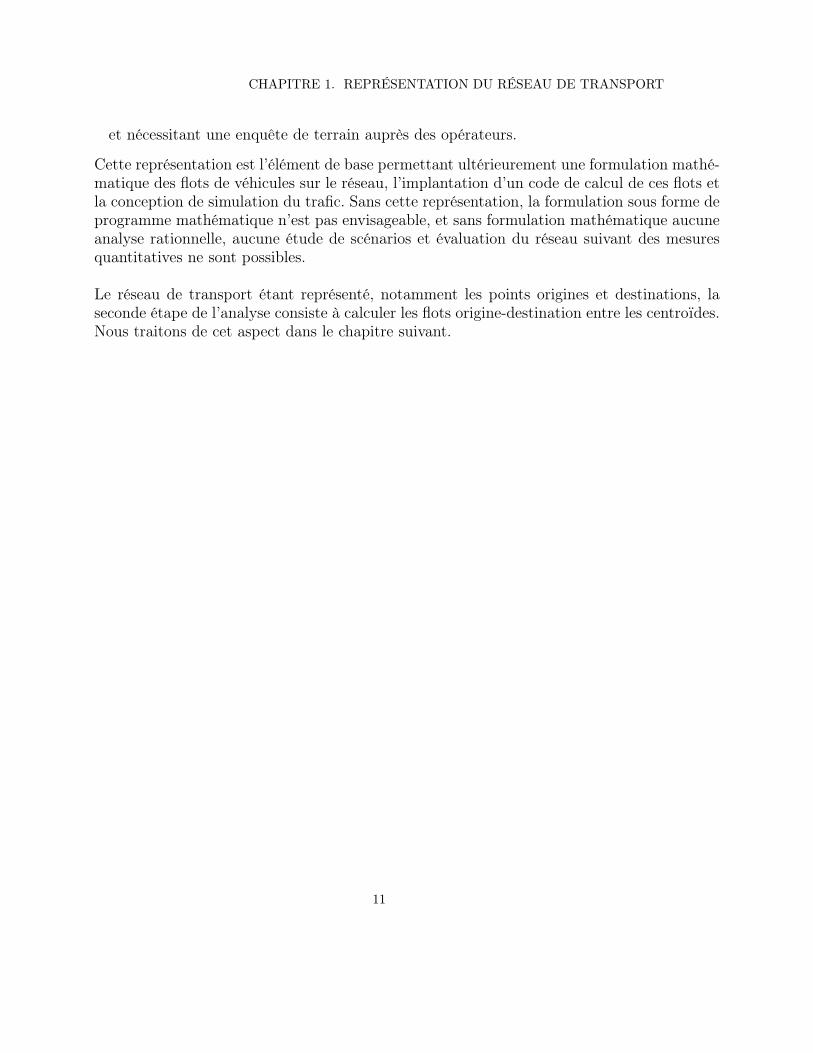
Pour expliciter cela, prenons par exemple le type de carrefour de la figure 1.4 (ci-dessous)existant dans les figures précédentes. Sachant qu’à chaque arc est associé un coût fixe, les
Fig. 1.4 – Représentation carrefour
9

CHAPITRE 1. REPRÉSENTATION DU RÉSEAU DE TRANSPORT
automobilistes venant de la route indiquée en pointillés expérimenteront les mêmes temps detrajet quelque soient leurs destinations (tout droit, à gauche ou à droite). Dans la réalité, lesrégles de priorité font qu’il est plus facile de tourner à droite que d’aller à gauche ou toutdroit. Ces variations de délais en fonction de la direction se représentent en ajoutant desnoeuds et arcs exprimant les directions possibles. Chaque arc directionnel étant valué par lecoût estimé pour prendre la direction correspondante. Ceci est représenté dans la figure 1.5 [6].
Fig. 1.5 – Représentation détaillée carrefour
Tous ces éléments nous permettent d’avoir une représentation selon le niveau de précisionvoulu du réseau de rues supportant les flots d’automobilistes, de bus Dakar Dem-Dikk, decars rapides et Ndiaga Ndiaye.
Pour pouvoir mettre en oeuvre cette représentation, il faut pouvoir disposer :
– d’une cartographie de la zone urbaine de Dakar : les services adminisitratifs dédiés pour-ront en cela nous y aider. Autrement, une telle cartographie peut être reconstituée à partird’image spatiale comme celle obtenue avec l’application publique Google Earth d’où pro-viennent les images montrées plus haut,
– d’un découpage zonale qui doit faire l’objet d’une réflexion,– des itinéraires des lignes de bus dakar Dem-Dikk consultables sur le site internent de
l’entreprise,– des itinéraires des lignes de cars rapides et Ndiaga Ndiaye, beaucoup plus diffiles à obtenir,
10
CHAPITRE 1. REPRÉSENTATION DU RÉSEAU DE TRANSPORT
et nécessitant une enquête de terrain auprès des opérateurs.
Cette représentation est l’élément de base permettant ultérieurement une formulation mathé-matique des flots de véhicules sur le réseau, l’implantation d’un code de calcul de ces flots etla conception de simulation du trafic. Sans cette représentation, la formulation sous forme deprogramme mathématique n’est pas envisageable, et sans formulation mathématique aucuneanalyse rationnelle, aucune étude de scénarios et évaluation du réseau suivant des mesuresquantitatives ne sont possibles.
Le réseau de transport étant représenté, notamment les points origines et destinations, laseconde étape de l’analyse consiste à calculer les flots origine-destination entre les centroïdes.Nous traitons de cet aspect dans le chapitre suivant.
11
Chapitre 2
Demandes origine-destination
Etant donné un ensemble de noeuds (centroïdes) R origines et un ensemble de noeuds des-tinations S, déterminer les flots Origine-Destination (O-D) consiste à évaluer sur la périoded’étude le nombre de véhicules/heure (ou de personnes/heure) allant d’une origine r ∈ R àune destination s ∈ S. Dans une période très courte, par exemple dans les simulations surun pas de temps très petit, R et S peuvent être disjoints. Sur une période plus grande (lematin, l’après-midi, en soirée), les centroïdes sont à la fois noeuds origines et destinations.Notre étude se situe dans ce dernier cas.
Désignons par Or la quantité connue de population de la zone r que l’on supposera sus-ceptible de quitter cette zone. Notons qrs le flot de r à s que l’on veut calculer.
qrs est une partie de la quantité totale Or, on a donc∑s
qrs = 0r, (2.1)
et de plus,qrs = 0rPrs,
où Prs est la proportion, pour l’heure inconnue, d’individus quittant r pour se rendre à s.Ces deux équations permettent de caractériser Prs. On a∑
s
Prs = 1.
Et comme par ailleurs 0 ≤ Prs ≤ 1 (Prs étant une proportion), on en déduit qu’elle peut êtreassimilée à une probabilité. L’hypothèse faite dans la littérature pour estimer Prs est que laproportion d’individus se rendant en s dépend d’une mesure d’attractivité, Ms, de s mais
12

CHAPITRE 2. DEMANDES ORIGINE-DESTINATION
également de l’attractivité des autres zones. La valeur de Prs est alors donnée par la fonctionlogistique (dites logit) suivante :
Prs =eγMs∑
m
eγMm∀ r, s
où γ est un paramètre à fixer.
L’attractivité d’une zone Ms est fonction de plusieurs caractéristiques pertinentes parmilesquelles on peut citer :
– le taux d’activités commerciales de la zone,– le taux d’entreprises privées,– le taux de bureaux administratifs,– le taux de structures éducatives (collèges, lycées, etc.),– le taux de logement,– etc.
Ces caractéristiques varient selon la zone. Si as désigne le vecteur des caractéristiques de salors Ms peut s’écrire comme une fonction de as,
i.e Ms = f(α, as),
où α est un vecteur de paramètres à fixer.
Grâce à la fonction f , pour une zone quelconque existante ou en encore sous l’état de projet,il est possible de calculer une mesure de son attractivité. Les caractéristiques citées peuventêtre connues pour chaque zone en consultant les registres appropriés : registre des entreprisesprivées de Dakar, organisation des administrations, etc. Soulignons aussi que l’effet de cescaractéristiques est intimement lié à la période d’étude. Le matin, les zones à fort taux d’en-treprises, et de structures éducatives auront tendance à avoir la plus forte attractivité, lespersonnes se rendant à leurs bureaux ou à leurs écoles. Le soir, la tendance se renverse, leszones à fort taux de logement auront une attractivité plus forte.
Avec f et as, qrs s’écrit donc en définitive
qrs = Oreγf(α,as)∑
m
eγf(α,am)∀ r, s.
γ et α sont des paramètres du modèle logit calibrés grâce à des observations de terrain rela-tives à la période d’étude. Ce calibrage peut être fait par une approximation par les moindres
13
CHAPITRE 2. DEMANDES ORIGINE-DESTINATION
carrées de la manière suivante.
Soient qrs, Or et a des observations effectuées. Les paramètres judicieux par optimisationdes moindres carrées sont ceux minimisant la fonction suivante :
z(γ, α) =∑r,s
(Oreγf(α,eas)∑
m
eγf(α,eam)− qrs)
2.
z(γ, α) est une fonction non linéaire, en général non convexe, qu’il est difficile d’optimiser.Nous utiliserons pour cela des méthodes d’optimisation numérique dédiées aux problèmes demoindres carrées (Gauss-Newton, Levenberg-Marquadt, etc. ), ou plus générales comme celled’approximation quadratique séquentielle (voir Nocedal et Wright [5] pour un état de l’artcomplet).
14
Chapitre 3
Affectation des demandesorigine-destination
L’affectation des demandes origine-destination sur le réseau consiste à déterminer, pourchaque arc du réseau, le flot qui s’écoulera sur cet arc. Ce calcul est fortement lié aux hypo-thèses faites dès le départ sur le comportement des usagers. L’hypothèse sans doute la plusnaturelle est de supposer que :
(H) : pour aller d’un noeud origine à un noeud destination, les usagers choisissent lechemin de moindre "coût", le coût d’un chemin étant mesuré par la somme des coûts des
arcs qui le composent
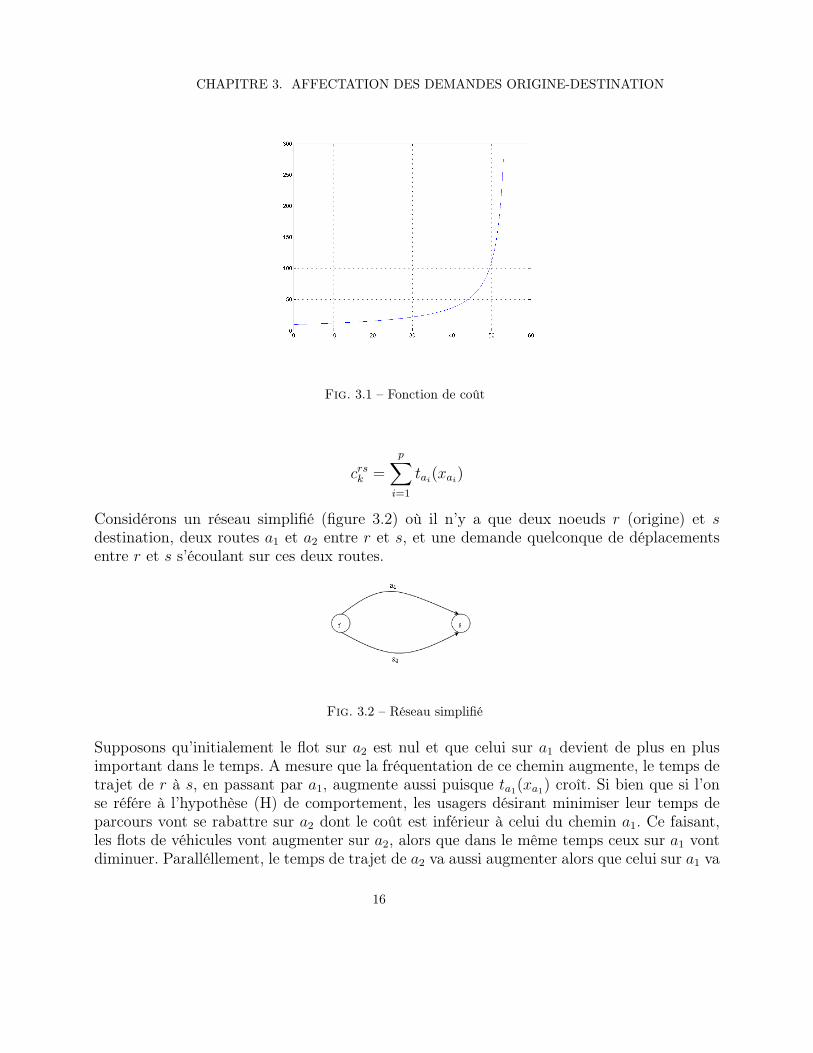
Le coût d’un arc a, noté ta, exprime le temps de trajet de cet arc. Ce temps de trajet dépendde la capacité connue de la route (largeur, longueur,etc.), du fait que la route débouche surune intersection avec ou sans signalisation, également connu, mais également du flot de vé-hicules circulant sur a que l’on cherche justement à déterminer. Plus le flot de véhicules estimportant sur a, plus le temps de trajet sera important pour parcourir la route correspon-dante (et inversement). Ceci s’exprime mathématiquement en posant que ta est une fonctioncroissante de xa, notée ta(xa). Pour pouvoir résoudre plus facilement les problèmes d’opti-misation associés on considére en général que ta est une fonction dérivable et strictementcroissante, tendant asymptotiquement vers +∞. C’est à dire ayant l’allure de la figure 3.1ci-dessous.
Si k est un chemin permettant d’aller d’une origine r à une destination s, et composé desarcs a1, a2,...,ap alors le coût du chemin est par définition
15
CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
Fig. 3.1 – Fonction de coût
crsk =
p∑i=1
tai(xai
)
Considérons un réseau simplifié (figure 3.2) où il n’y a que deux noeuds r (origine) et sdestination, deux routes a1 et a2 entre r et s, et une demande quelconque de déplacementsentre r et s s’écoulant sur ces deux routes.
Fig. 3.2 – Réseau simplifié
Supposons qu’initialement le flot sur a2 est nul et que celui sur a1 devient de plus en plusimportant dans le temps. A mesure que la fréquentation de ce chemin augmente, le temps detrajet de r à s, en passant par a1, augmente aussi puisque ta1(xa1) croît. Si bien que si l’onse référe à l’hypothèse (H) de comportement, les usagers désirant minimiser leur temps deparcours vont se rabattre sur a2 dont le coût est inférieur à celui du chemin a1. Ce faisant,les flots de véhicules vont augmenter sur a2, alors que dans le même temps ceux sur a1 vontdiminuer. Paralléllement, le temps de trajet de a2 va aussi augmenter alors que celui sur a1 va
16
CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
diminuer (pour ceux qui continuent à l’emprunter). Au bout d’un certain temps, si le tempsde trajet sur a2 devient plus élevé que celui sur a1 il devient plus intéressant aux usagersde reprendre a1. Le seul cas où ce balancement instable entre a1 et a2 ne peut se produireest celui dans lequel les temps de trajet sur les deux routes sont rigoureusement les mêmes.Cet état stable, où aucun usager ne peut individuellement améliorer son temps de trajet, estappelé un point d’équilibre usager.
Dans le contexte de l’hypothèse (H), affecter des demandes origine-destination sur un ré-seau de transport consiste à déterminer ces points d’équilibre. Pour le réseau simplifié, latâche est relativement simple puisqu’il suffit de calculer les valeurs des flots xa1 et xa2 pourlesquelles ta1(xa1) = ta2(xa2). Dans un réseau routier réaliste avec plusieurs centaines denoeuds origines et destinations, des centaines de routes possibles, comportant chacune plu-sieurs arcs, déterminer un point d’équilibre usager est beaucoup plus ardu. Cela est rendupossible par une définition formelle d’un point d’équilibre et la formulation d’un programmemathématique dont la valeur optimale correspond exactement à la définition donnée. Nousdonnons ces résultats de base dans la section 3.1.
Le modèle de la section 3.1 considère des fonctions de coût sur a, ta(xa), ne dépendant quedu flot xa. Dans l’étude que nous voulons conduire, les arcs du réseau, entre deux noeuds,représentent divers modes de transport s’écoulant physiquement sur la même route. Aussi, lecoût d’un arc représentant les transports en commun ne dépend pas uniquement du flot debus (ou cars rapides) mais également du flot des automobilistes. Ceci s’explique par le constatqu’un trafic important d’automobilistes a une incidence sur le temps de trajet des transporten commun et inversement. Cependant, l’effet du trafic de véhicules particuliers sur le tempsde trajet des transports en commun n’est pas (en général) du même ordre de grandeur quecelui des transports en commun sur les véhicules particuliers. Cela tient au fait qu’il y abeaucoup plus de véhicules particuliers que de véhicules de transport en commun. On ditdans ce cas qu’automobilistes et transports en commun sont en interactions asymétriques.Nous traitons cet aspect des choses dans la section 3.2. Le modèle présenté dans cette sectionfera l’objet d’une expérimentation dans le cas du réseau urbain de Dakar.
3.1 Modèle d’équilibre usager
Pour écrire un modèle mathématique de recherche d’un point d’équlibre, il convient d’abordd’en donner une définition formelle.
Définition 3.1.1 Pour chaque paire origine-destination, au point d’équilibre usager, le tempsde trajet sur les chemins utilisés entre cette origine et cette destination sont égaux à une
17

CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
même valeur. Cette valeur est elle-même inférieure ou égale aux temps de trajet qu’aurait euun usager s’il avait emprunté un chemin non utilisé (dans la solution du point d’équilibre).
Mathématiquement, on prouve qu’un point vérifiant cette définition est donné par la solutionoptimale d’un problème d’optimisation.
Introduisons d’abord les notations suivantes. On désigne par :
- A : l’ensemble des arcs du réseau,- xa : le flot sur l’arc a ∈ A,- R : l’ensemble des noeuds origines,- S : l’ensemble des noeuds destinations,- Krs : l’ensemble des chemins de r ∈ R à s ∈ S,- qrs : la demande origine-destination entre r et s,- f rs
k : le flot de véhicules sur le chemin k ∈ K∇∫ ,- δrs
a,k : valeur valant 1 si a ∈ A appartient au chemin k ∈ Krs et 0 sinon.
Avec ces notations, on a le résultat fondamental suivant
Théorème 3.1.2 ([6]) L’unique point d’équilibre usager correspond à la solution optimaledu problème d’optimisation suivant
Min z(x) =∑a
∫ xa
0ta(ω)dω
s− a :∑k
f rsk = qrs ∀r, s
f rsk ≥ 0 ∀k, r, s
xa =∑r
∑s
∑k
f rsk δrs
a,k ∀a
On prouve que la fonction objectif du problème d’optimisation est strictement convexe parrapport aux variables de flots xa, et son domaine réalisable est convexe. On a donc un pro-blème d’optimisation convexe à variables continues pour lequel de nombreux algorithmes derésolution existent (voir [1]). La solution du problème d’optimisation est unique, par rapportaux variables xa, indiquant ainsi l’unicité du point d’équilibre.
Du fait que l’on ne tient pas compte d’interactions entre les arcs du réseau, ce type deformulation n’est en fait pertinent que si l’on ne considère qu’un seul mode de transport. Deplus, en négligeant dans ce mode les interactions de flots existantes sur les routes (cas desroutes à double sens par exemple). Même en se placant dans ces conditions, il est probableque les valeurs optimales xa ne correspondent à la réalité. C’est à dire aux valeurs qui seraientobtenues par une observation sur le terrain des flots de trafic de chaque route. Si ces valeurssont très différentes de l’existant, la pertinence du modèle se trouve alors prise en défaut.
18

CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
Car de tels résultats ne justifieraient pas l’utilisation du modèle dans l’étude de scénarios deconstruction de routes qui n’existent pas encore.
Il y a plusieurs raisons pouvant expliquer les différences entre les flots réels et ceux cal-culés. Parmi elles, nous pouvons citer :
1. L’hypothèse (H) n’est pas toujours vérifiée car les critères de choix des usagers ne sontpas uniformes. Certains préféreront par exemple la route la plus directe au prix d’untemps de trajet élevé.
2. L’hypothèse (H) suppose des usagers qu’ils diposent d’informations à priori sur des arcsqu’ils n’ont pas encore empruntés. En effet, en partant d’une origine, si un usager jugequ’une route est plus coûteuse qu’une autre, c’est qu’il sait que les flots sur les arcs (qu’iln’a pas encore expérimentés) de cette route sont tels que le coût va être élevé.
3. La fonction de coût ta(xa) n’est pas connue avec précision.
Des travaux de recherche se sont intéressés aux inconvénients 1 et 2. Pour les traiter, l’hypo-thèse (H) a été relachée en introduisant la notion de chemins "estimés" de moindres "coûts".Cette notion permet de refléter la perception que se fait un usager du coût d’un cheminqui sera probablement différente du coût réel qu’il expérimentera. Elle conduit à introduiredes variables aléatoires et à traiter des processus stochastiques [6]. Pour ce projet nous nedévelopperons pas cet aspect qui pourrait faire l’objet d’une étude ultérieure. Nous nousintéresserons à l’inconvénient 2 pour lequel nous proposons la stratégie suivante.
Une fonction usuelle de coût utilisée dans les études trafic est la fonction de Davidson (voir[6]) suivante
ta(xa) = t0a[1 + αxa
ca − xa
],
où α est un paramètre, ca la capacité de l’arc a et t0a le temps de trajet quand le flot sur aest nul (route sans aucun véhicule). En d’autres termes, t0a est la longueur de la route diviséepar la vitesse autorisée.
Si les flots observés, notés xa, sont différents des flots calculés xa, nous emettrons l’hypo-thèse que les fonctions de coûts sont mal calibrées (paramètre α mal choisi). Pour obtenir lemeilleur calibrage possible, nous chercherons alors le paramètre α permettant de donner lasolution d’équilibre la plus proche des observations. Ceci peut se faire en deux étapes.
• Etape 1.
D’abord en résolvant le problème d’optimisation suivant :
19

CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
Min∑a
(xa − xa)2
s− a :∑k
f rsk = qrs ∀r, s
f rsk ≥ 0 ∀k, r, s
xa =∑r
∑s
∑k
f rsk δrs
a,k ∀a
Désignons par ε la valeur optimale de ce problème.
• Etape 2.
Puis, en résolvant le problème d’équilibre usager sur une boule de centre xa et de rayonε
Min z(x, α) =∑a
∫ xa
0ta(ω, α)dω
s− a :∑k
f rsk = qrs ∀r, s
f rsk ≥ 0 ∀k, r, s
xa =∑r
∑s
∑k
f rsk δrs
a,k ∀a∑a
(xa − xa)2 ≤ ε
Le premier problème étant strictement convexe en xa, sa solution optimale, en variables xa,est unique et est la plus proche au sens de la mesure euclidienne prise des observations deterrain. On prouve également que le second problème est convexe, et son domaine réalisablene contient que les valeurs de flots xa trouvées à l’étape 1. Par conséquent, la résolution dusecond problème donnera la valeur α permettant à ces flots xa d’être un point d’équilibreusager. La valeur α ainsi calée sera le paramètre définitif des fonctions de coût. Nous utilise-rons ce principe de calcul de paramètre dans le modèle complet (section ci-dessous) reflétanttous les aspects du trafic de la ville de Dakar. Remarquons pour finir cette section que nousn’avons considéré ici qu’un seul paramètre α. Les mêmes étapes peuvent être effectuées enconsidérant un paramètre différent par arc du réseau.
3.2 Modèle d’équilibre avec plusieurs modes de transport
Nous considérons ici un réseau de transport comportant plusieurs modes de transport. Troisalternatives de transport seront particulièrement étudiées : bus, cars rapides (Ndiaga Ndiaye)et véhicules particuliers. Pour les besoins de la présentation de la méthodologie, nous regrou-pons les modes "bus" et "cars rapides" sous le terme transports en commun. Nous n’ex-poserons donc dans ce texte que la modélisation pour les modes "véhicules particuliers" et
20
CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
"transports en commun". Dans le travail définitif, il conviendra de distinguer les diversesformes de transports en commun recouvrant des réalités différentes. Néammoins, ce qui estprésenté ici se généralise aisément à un nombre quelconque de modes de transport.
Pour rendre compte de ces modes, entre toutes paires de noeuds, deux arcs distinguerontles différents flots. Nous désignerons par A l’ensemble des arcs représentant les flots de vé-hicules particuliers et A ceux des transports en commun. Affecter les demandes entre lesorigines et les destinations consiste à donner les valeurs des flots xa et xa obtenues à l’étatd’équilibre.
Il faut noter que les transports en commun se distinguent des véhicules particuliers en cecique le parcours et la fréquence des véhicules sont fixés à l’avance par le gestionnaire. Parcourset fréquences sont conçus de manière à satisfaire une demande de transport. Si l’unité de flotutilisée pour xa et xa est le nombre de personnes par heure transporté, la résolution du pro-blème d’équilibre sur le graphe couplant les deux modes conduit à trouver les flots xa et xa
à l’ état d’équlibre sur les réseaux de transports en commun et de véhicules particuliers prisséparemment. Des flots xa il peut alors être déduit les flots f rs
k des transports en communsur les chemins k. Ces valeurs correspondent aux fréquences de bus ou cars rapides sur kpermettant de satisfaire la demande à l’état d’équilibre. Bien entendu, étant donné que lesitinéraires actuels ont été élaborés autrement, la réalité des fréquences et des chemins destransports en commun de Dakar sera sans doute complétement différente.
Un des intérêts du calcul effectué ici pourrait être d’abord de suggérer des possibilités demodification de chemins ou de fréquences. Par ailleurs, dans l’étude de scénarios de réseauxroutiers qui n’existent pas encore, ces éléments ne sont pas encore fixés. Le second intérêt denotre calcul est par conséquent de rendre possible le calcul des chemins et fréquences idéauxdu futur réseau tenant compte de prévisions des flots automobiles.
Pour formuler un programme mathématique permettant de trouver les différents flots, ilest nécessaire de s’intéresser aux fonctions de coûts des arcs a et a. Soit ta le temps de trajetde l’arc a. Cette route est également utilisée par des automobilistes représentés par l’arc a.Etant donné la présence de deux modes, les temps de trajet de a et a varient en fonction desdeux flots :
i.e ta(xa, xa) , ta(xa, xa)
Le parc automobile de véhicules particuliers étant nettement supérieur à celui des transportsen commun, l’influence du flot xa sur le temps ta est plus important que celle de xa sur ta. Ence sens que l’augmentation du temps de trajet de a quand une unité supplémentaire de flotxa arrive est plus importante que celle de a quand xa augmente d’une unité. Cette interaction
21

CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
asymétrique entre a et a se traduit mathématiquement par
∂ta(xa, xa)
∂xa
6= ∂ta(xa, xa)
∂xa
.
Du fait de cette asymétrie, il n’existe pas, dans l’état actuel des connaissances, de programmemathématique du type de celui exposé en section 3.1 dont la solution optimale donne un pointd’équilibre sur les deux modes. Il existe néammoins un algorithme dit de "diagonalisation"[6] fournissant une approximation du point d’équilibre. Nous utiliserons cet algorithme.
Sachant qu’il y a deux modes de transport, le préalable à l’utilisation de l’algorithme de dia-gonalisation est d’approximer la proportion d’usagers utilisant sur la période d’étude leursvéhicules particuliers et ceux voyageant par les transports en commun. Cette proportion estfonction de divers paramètres parmi lesquels il y a :
– la proportion d’individus disposant d’une voiture,– le temps minimum pour aller de r à s en voiture,– le temps minimum pour aller de r à s en transport en commun,– un facteur de préférence.
Notons brs le vecteur de ces caractéristiques, et ga(α, brs) (resp. gt(α, brs)) une fonction deces caractéristiques pour le mode "véhicules particuliers" (resp. "transports en commun"). αétant un vecteur de paramètres. De manière analogue au chapitre 2, la probabilité P a
rs qu’unindividu allant de r à s prenne sa voiture sera mesurée à l’aide d’une loi logit
P ars =
eγga(α,brs)
eγga(α,brs) + eγgt(α,brs).
La demande de transport, qrs, en véhicules particuliers sera donc :
qrs = qrsPars,
où qrs est la demande totale calculée au chapitre 2.
Comme P ars dépend des temps minimums (en voiture ou en transport en commun) pour
aller de r à s, le calcul de qrs nécessite la connaissance du point d’équilibre. L’algorithme dediagonalisation est en fait une suite de problèmes dont chaque solution optimale donne desflots respectant les proportions P a
rs. Il est prouvé que ces solutions optimales convergent versun point d’équilibre usager.
22
CHAPITRE 3. AFFECTATION DES DEMANDES ORIGINE-DESTINATION
Le point trouvé, comme nous l’avions remarqué pour le modèle de base, peut être très éloignéde la réalité. Soit à cause de l’hypothèse (H) erronée ou du mauvais calibrage des fonctionsde coût. Pour traiter ce problème, nous nous intéresserons au calibrage des fonctions de coûtpar un procédé analogue à celui de la section 3.1.
D’autre part, nous avions souligné en début de chapitre que dans un réseau de transporten commun en fonctionnement, les fréquences des véhicules étaient fixées. Nous pouvons te-nir compte de cet aspect en fixant simplement dans notre modèle les valeurs f rs
l . Cela a poureffet de fixer aussi les variables qrs et xa. Le problème se raméne dans ce cas à la formulationde base présentée à la section 3.1.
23
Chapitre 4
Dynamique de population
Les méthodes que nous avons présentées précedemment négligent l’aspect temporel. Les choixde construction de réseaux routiers dépendent de la demande actuelle de transport qu’ilconvient de satisfaire mais doivent également prendre en compte les évolutions de cette de-mande. Cette évolution est liée à la dynamique urbaine. Plus précisemment, le calcul de lademande totale qrs fait intervenir la taille de la population Or de même que la proportionde population estimée allant de r à s. La taille de la population Or est l’exemple type devaleur fluctuant avec le temps. Des populations quittent des zones pour venir dans d’autres,de nouveaux quartiers se créent, tout ceci dans un contexte démographique (naissances, dé-cés) mouvant. Ces effets néammoins ne s’apprécient que sur des périodes assez longues. Ladiscrétisation de temps que nous considérerons sera donc de l’ordre de plusieurs années.
Etant donné donc une telle discrétisation t : 1, 2, ..., T , prendre en compte l’aspect tem-porel consiste à déterminer pour chaque pas de temps t la valeur Or(t) de la population dela zone r. Cette valeur dépend shématiquement de trois caractéristiques : ce qui entre dansr, ce qui en sort et les échanges de population entre r et une autre zone du réseau urbain.
Les entrées dans r peuvent se mesurer quantitativement à travers le taux d’immigration(mesurable par le taux d’urbanisation) dans r et le taux de naissance. Dans le même ordred’idée, les sorties sont relatives aux taux d’émigration et de mortalité, et les échanges sontdus à une interdépendence entre régions.
Avec ces caractéristiques, les croissances de deux zones r et s peuvent alors être modéli-sées sous la forme de deux équations différentielles ordinaires non linéaires du premier ordre(voir J. El Ghordaf [3]).
24

CHAPITRE 4. DYNAMIQUE DE POPULATION
dOr
dt= krOr(Pr −Or − βOs)
dOs
dt= ksOs(Ps −Os − βOr)
avec :
– Or (resp. Os) : quantité de population de Or (resp. Os).– kr (resp. ks) : taux de naissance et d’immigration de r (resp. s).– β : paramètre d’interdépendence entre les régions, typiquement les ressources d’une région
utilisées par les habitants de l’autre région.– Pr (resp. Ps) : le potentiel de la région tenant compte du taux de mortalité et d’émigration
du nombre maximal d’individus que la région peut abriter et de kr (resp. ks).
En prenant un nombre quelconque de zones, une telle modélisation reste encore possible etdes solutions numériques pour une discrétisation donnée du temps peuvent être obtenues.
Pour tenir compte de la dynamique du problème, les sous problèmes de l’algorithme dediagonalisation évoqué à la section 3.2 seront considérés relativement au temps. Pour chaquet nous obtiendrons alors un point d’équilibre.
25
Chapitre 5
Localisation des activités
Le problème de localisation des activités d’une ville a été posé pour la première fois dansle contexte de la construction d’une nouvelle ville (voir [4]). On entend par "activités" (ouservices) un ensemble d’opérations humaines, au sein d’une ville, dirigées vers une finalité.Par exemples, une zone commerciale comportant des grandes surfaces, des marchés et bou-tiques constitue une activité (ou un service) dédié à la consommation, un centre administratifoffre des services publics, un quartier pavillonnaire offre des services de logement, etc. Il estimportant de voir que l’activité se distingue de la zone (le terrain) où elle se trouve. Si la zoneest fixe, l’activité elle pourrait être, avec plus moins de difficultés, transférée dans une autrezone. C’est précisement la question du choix des meilleures zones pour les activités que l’onse pose dans le problème de localisation. Celui-ci se pose dans la littérature de la manièresuivante.
On considère un découpage d’une ville en n zones, et n activités à situer sur chacune deces zones. Les activités sont génératrices de flux de personnes qui vont d’une activité à uneautre. Le problème est de savoir quelles routes construire entre les zones et où placer les acti-vités pour que le coût du réseau soit minimum. Ce coût comprend les temps de déplacementdes usagers mais également le coût de construction des routes et de localisation des activités.
Deux problèmes se trouvent ainsi conjugués en un seul : un problème de conception deréseau à coût minimum et un problème d’affectation. Quand le réseau existe déjà, il s’agitd’un problème d’affectation d’activités aux zones, et inversement si l’affectation est déjà faiteil s’agit d’un problème de conception de réseau de transport.
Nous avons dans les chapitres précédents donné les moyens de traiter le problème de concep-tion de réseau. Nous nous proposons ici de résoudre le problème inverse d’affectation desactivités étant donné un réseau connu.
26
CHAPITRE 5. LOCALISATION DES ACTIVITÉS
Théoriquement, ce type de problème peut se classifier dans les problèmes dits d’affectationquadratique (voir [4] pour plus de détails). Nous nous proposons, à l’aide des modèles de cetype, d’évaluer les effets sur le réseau urbain dakarois de la relocalisation de certaines activi-tés (à déterminer) à forte affluence : marchés, centres commerciaux, centres administratifs,etc.
27
Chapitre 6
Exploitation des modèles
Nous avons vu dans les chapitres précédents comment calculer des points d’équilibre en te-nant compte de divers types de trafic, et de variations des populations des zones urbaines.Nous résumons à présent dans ce chapitre différentes possibilités d’exploitation de ces mo-dèles pour l’analyse et la prise de décision opérationnelle.
Premièrement, les modèles présentés fournissent un outil d’analyse des flots d’un réseauen cours de fonctionnement plus pratique, et surtout moins coûteux, qu’un comptage brutaldes flots sur toutes les rues et intersections.
Deuxièmement, supposons qu’un décideur, constatant les problèmes de congestion du réseau,désire faire des aménagements en terme de construction de routes nouvelles, de redimension-nement ou de réorientation de routes existantes. Plusieurs projets s’offrent alors au décideurdont l’objectif est de choisir le meilleur tenant compte des besoins actuels mais également àvenir. Les modèles proposés permettent pour chaque projet de calculer les flots de véhiculesprévisibles correspondant au point d’équlibre.
Soient Av et Av l’ensemble des arcs (routes) du scénario v et (xa, xa) les flots correspon-dant au point d’équilibre sur le réseau. Sachant que ta(xa, xa) représente le temps de trajetde l’arc a ∈ Av du scénario v, alors
C(v) =∑a∈Av
ta(xa, xa) +∑a∈Av
ta(xa, xa)
est la somme de tous les temps de trajet au point d’équilibre. Le coût total de tous les dé-placements des usagers. C(v) sera notre mesure de la fluidité du trafic.
En négligeant la nature dynamique, le meilleur réseau routier sera celui minimisant cettevaleur.
28

CHAPITRE 6. EXPLOITATION DES MODÈLES
Si l’on tient compte de la dynamique, cette valeur dépend alors du temps t = 1, 2, .., Toù l’on se trouve.
i.e C(v(t)) =∑a∈Av
ta(xa(t), xa(t)) +∑a∈Av
ta(xa(t), xa(t)) t = 1, 2, ...T.
Plusieurs mesures de qualité d’un réseau peuvent alors être prises. On pourra d’abord consi-dérer que le meilleur réseau est celui minimisant la somme des temps de déplacement surtous les pas de temps
i.e∑
t
C(v(t)).
On peut également considérer que le meilleur réseau est celui dont la plus grande valeurC(v(t)) est la plus petite possible. En d’autres termes, le réseau minimisant
i.e Maxt
C(v(t)).
Quand le nombre de scénarios et de périodes à étudier n’est pas très grand (quelques cen-taines) alors il est envisageable de les énumerer tous, de calculer pour chacun et en toutepériode les points d’équilibre et le coût total de déplacement, puis enfin de retenir celui mi-nimisant la mesure de qualité qui aura été prise.
Pour une combinatoire très grande (nombre exponentiel de scénarios ou de périodes) untel procédé n’est pas envisageable. Il conviendra à ce moment d’écrire un programme ma-thématique dont la résolution a une complexité moins grande que l’énumération de tous lesscénarios.
Dans cette étude, nous nous limiterons dans un premier temps à un nombre raisonnable descénarios (quelques dizaines) et de périodes. Nous étudierons ensuite l’écriture d’un modélepermettant d’éviter l’énumération de tous les scénarios et périodes.
Enfin le dernier mode d’exploitation concernera la localisation des activités. A réseau connu,et pour un ensemble d’activités à déterminer, nous nous interrogerons sur leur localisationoptimale.
29
Chapitre 7
Plan de travail
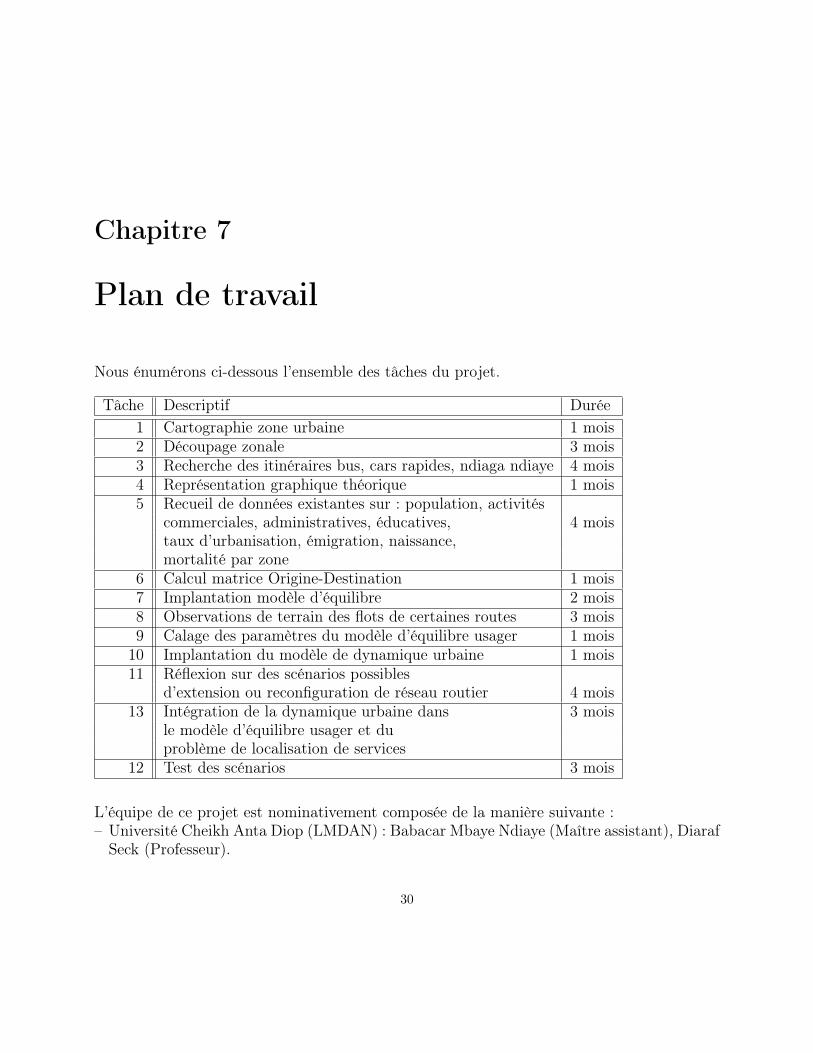
Nous énumérons ci-dessous l’ensemble des tâches du projet.
Tâche Descriptif Durée1 Cartographie zone urbaine 1 mois2 Découpage zonale 3 mois3 Recherche des itinéraires bus, cars rapides, ndiaga ndiaye 4 mois4 Représentation graphique théorique 1 mois5 Recueil de données existantes sur : population, activités
commerciales, administratives, éducatives, 4 moistaux d’urbanisation, émigration, naissance,mortalité par zone
6 Calcul matrice Origine-Destination 1 mois7 Implantation modèle d’équilibre 2 mois8 Observations de terrain des flots de certaines routes 3 mois9 Calage des paramètres du modèle d’équilibre usager 1 mois
10 Implantation du modèle de dynamique urbaine 1 mois11 Réflexion sur des scénarios possibles
d’extension ou reconfiguration de réseau routier 4 mois13 Intégration de la dynamique urbaine dans 3 mois
le modèle d’équilibre usager et duproblème de localisation de services
12 Test des scénarios 3 mois
L’équipe de ce projet est nominativement composée de la manière suivante :– Université Cheikh Anta Diop (LMDAN) : Babacar Mbaye Ndiaye (Maître assistant), Diaraf
Seck (Professeur).
30
CHAPITRE 7. PLAN DE TRAVAIL
– Université Cheikh Anta Diop (LTI) : Cheikh Bourama Djiba (Doctorant)– Université Ouagadougou : Blaise Somé (Professeur).– Université du Havre : Serigne Gueye (Maître de Conférences).
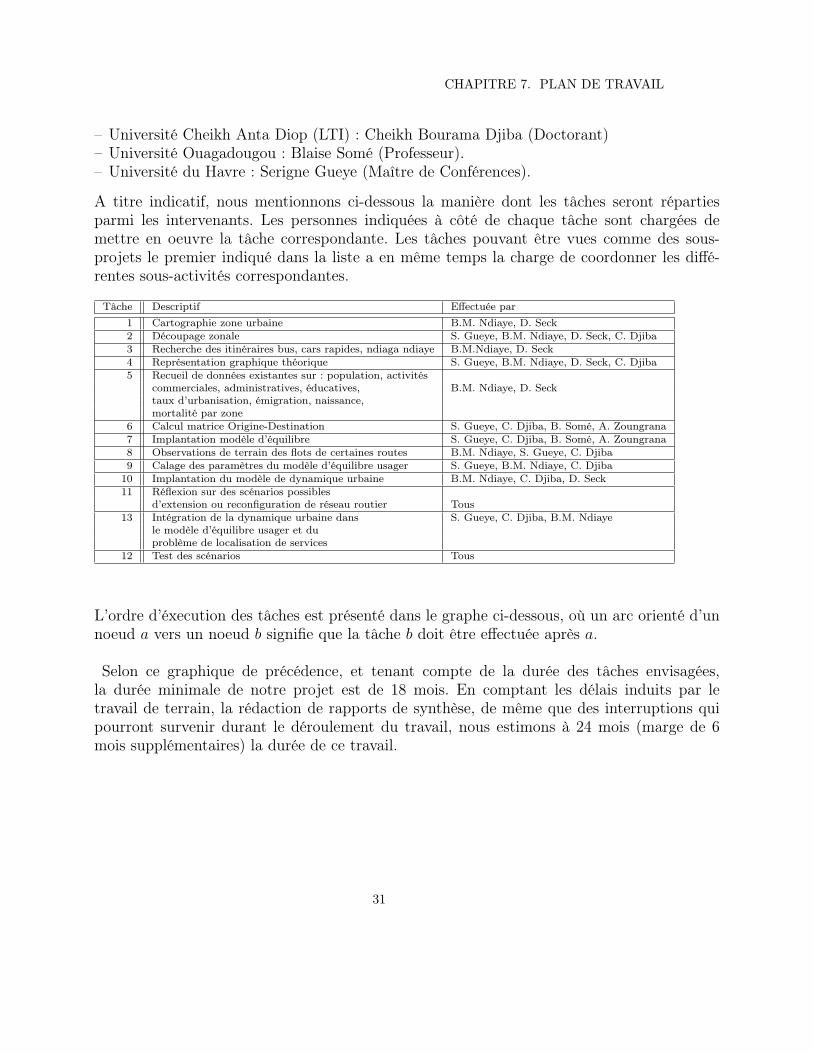
A titre indicatif, nous mentionnons ci-dessous la manière dont les tâches seront répartiesparmi les intervenants. Les personnes indiquées à côté de chaque tâche sont chargées demettre en oeuvre la tâche correspondante. Les tâches pouvant être vues comme des sous-projets le premier indiqué dans la liste a en même temps la charge de coordonner les diffé-rentes sous-activités correspondantes.
Tâche Descriptif Effectuée par1 Cartographie zone urbaine B.M. Ndiaye, D. Seck2 Découpage zonale S. Gueye, B.M. Ndiaye, D. Seck, C. Djiba3 Recherche des itinéraires bus, cars rapides, ndiaga ndiaye B.M.Ndiaye, D. Seck4 Représentation graphique théorique S. Gueye, B.M. Ndiaye, D. Seck, C. Djiba5 Recueil de données existantes sur : population, activités
commerciales, administratives, éducatives, B.M. Ndiaye, D. Secktaux d’urbanisation, émigration, naissance,mortalité par zone
6 Calcul matrice Origine-Destination S. Gueye, C. Djiba, B. Somé, A. Zoungrana7 Implantation modèle d’équilibre S. Gueye, C. Djiba, B. Somé, A. Zoungrana8 Observations de terrain des flots de certaines routes B.M. Ndiaye, S. Gueye, C. Djiba9 Calage des paramètres du modèle d’équilibre usager S. Gueye, B.M. Ndiaye, C. Djiba
10 Implantation du modèle de dynamique urbaine B.M. Ndiaye, C. Djiba, D. Seck11 Réflexion sur des scénarios possibles
d’extension ou reconfiguration de réseau routier Tous13 Intégration de la dynamique urbaine dans S. Gueye, C. Djiba, B.M. Ndiaye
le modèle d’équilibre usager et duproblème de localisation de services
12 Test des scénarios Tous
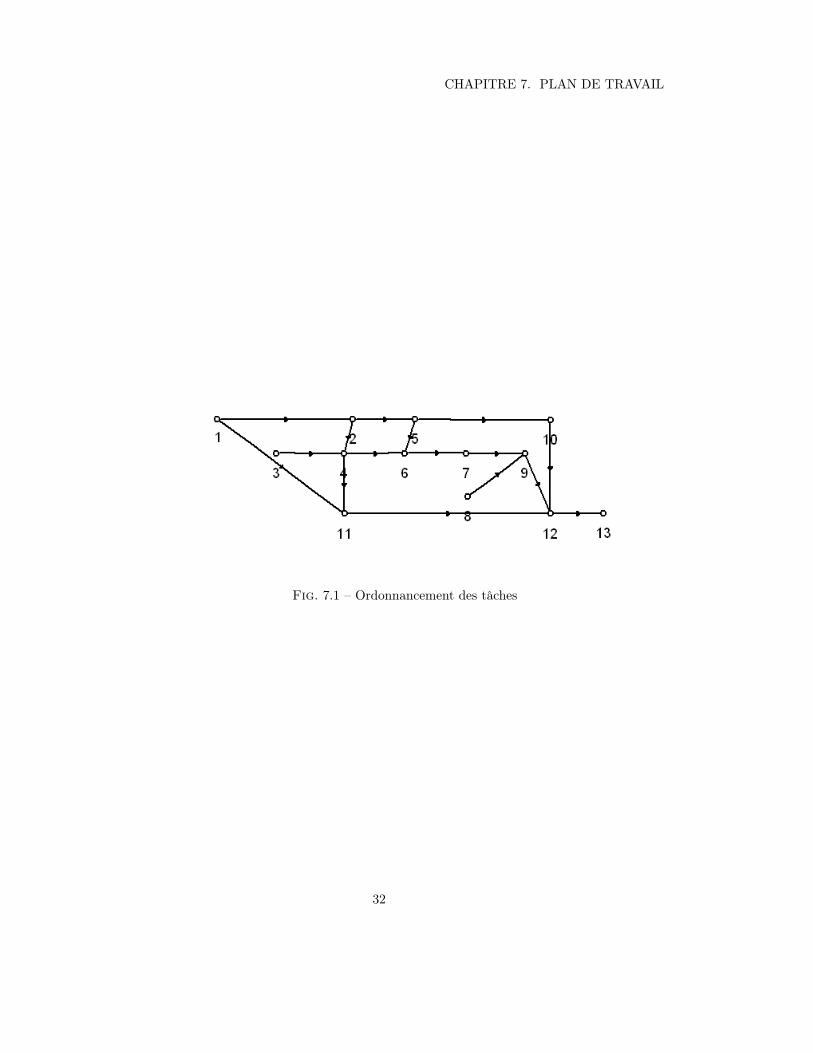
L’ordre d’éxecution des tâches est présenté dans le graphe ci-dessous, où un arc orienté d’unnoeud a vers un noeud b signifie que la tâche b doit être effectuée après a.
Selon ce graphique de précédence, et tenant compte de la durée des tâches envisagées,la durée minimale de notre projet est de 18 mois. En comptant les délais induits par letravail de terrain, la rédaction de rapports de synthèse, de même que des interruptions quipourront survenir durant le déroulement du travail, nous estimons à 24 mois (marge de 6mois supplémentaires) la durée de ce travail.
31
CHAPITRE 7. PLAN DE TRAVAIL
Fig. 7.1 – Ordonnancement des tâches
32
Chapitre 8
Perspectives
Le travail proposé ici se limite à l’analyse des flots de véhicules et aux tests de scénarios,mais il ouvre dans le même temps un certain nombre de perspectives de recherche.
La première concerne le problème de synchronisation optimale des feux de signalisation. Eneffet, outre la struture du réseau à laquelle nous nous attachons dans ce projet, la fluidité dela circulation est aussi dépendante du système de signalisation. Il convient de calibrer celui-cide la manière la plus judicieuse possible. Nous avons choisi de ne pas traiter ce problèmedans un premier temps car nous pensons que les problèmes de congestion des aggloméra-tions africaines tiennent plus (actuellement) à la configuration des routes et des villes qu’àla synchronisation des feux. Il est tout de même intéressant d’un point de vue théorique, eten perspective de l’amélioration de la configuration des réseaux, d’étudier ce problème. Celapeut être fait en considérant, dans les fonctions de coût, un coût additionnel relatif aux cyclesdes feux. Ce type de fonction est connu (voir [2]). Il s’agira alors de déterminer les cyclesoptimaux minimisant le temps de déplacement total des usagers.
La deuxième perspective concerne l’élargissement de nos travaux à l’étude du réseau detransport à l’échelle nationale. Il s’agira ici d’exploiter la méthodologie d’analyse des flotsdu réseau urbain afin d’étudier des scénarios de configurations routières tenant compte desdemandes des régions.
La troisième perspective est d’ordre théorique mais permet d’affiner les modèles. Les fonc-tions de coûts ta(xa, xa) (voir section 3.2), exprimant le temps de trajet de l’arc a en fonctiondes flots xa (flot transports en commun) et xa (flot automobiles), sont supposées continues etdifférentiables dans l’algorithme de diagonalisation. De plus, dans l’étude de l’écoulement deces flots, l’unité utilisée est le nombre de personnes par heure transporté. Notons que pour seramener à des nombres de voitures par heure, de bus par heure ou de cars rapides par heure, ilsuffit d’effectuer une conversion à l’aide d’estimation de la capacité de chacun de ces véhicules.
33
CHAPITRE 8. PERSPECTIVES
Ceci dit, xa étant fixé, le temps de trajet ta(xa, xa) ne varie pas en pratique de facon continueen fonction de xa. En effet, si un bus a pour capacité 100, et que xa = 99, l’augmentationd’une unité de xa ne change en rien le temps de parcours des 100 personnes puisque celles-cise trouveront dans le même bus. En revanche, une nouvelle augmentation d’une unité aurapour corollaire d’augmenter le temps de trajet de la 101-ème personne puisque celle-ci devraattendre le bus suivant. Globalement, le temps de trajet des 101 personnes sera plus grandque celui des 100 personnes.
ta(xa, xa) n’évolue donc pas comme une fonction continue mais comme une fonction discon-tinue en escalier. L’algorithme de diagonalisation devra donc être repensé en tenant comptede cela.
Enfin, les méthodes présentées ici supposent que les variables de flots sont continues. Or,en pratique, elles sont en nombres entiers. 100 personnes/heure a plus de sens 100.5 per-sonnes/heure. Une autre perspective est donc de repenser les méthodes de manière à obtenirdes valeurs entières.
34
Bibliographie
[1] Stephen Boyd and Lieven Vanderberghe. Convex Optimization. Cambridge UniversityPress, 2004.
[2] Carlos F. Daganzo. Fundamentals of Transportation and Traffic Operations. Pergamon,1997.
[3] O. Arino J. El Ghordaf, M.H. Hbid. A mathematical study of a two-regional populationgrowth model. C.R. Biologies, 327 :977–982, 2004.
[4] Marc Los. Simultaneous optimization of land use and transportation : A synthesis of thequadratic assignment problem and the optimal network problem. Regional Science andUrban Economics, (8) :21–42, 1978.
[5] Jorge Nocedal and Stephen J. Wright. Numerical Optimization. Springer Series in Ope-rations Research. Springer-Verlag, New York, Inc., 1999.
[6] Yosef Sheffi. Urban Transportation Networks : Equilibrium Analysis with MathematicalProgramming Methods. Prentice Hall, Inc., Englewood Cliff, New Jersey, 07632, 1985.
35