PHYSIQUE CHIMIEphysicus.free.fr/seconde-2019/pdf/2D-COURS.pdfPHYSIQUE CHIMIE 2e Figure 1.2 – La...
42
Classe de seconde PHYSIQUE CHIMIE Wulfran Fortin (2019)
Transcript of PHYSIQUE CHIMIEphysicus.free.fr/seconde-2019/pdf/2D-COURS.pdfPHYSIQUE CHIMIE 2e Figure 1.2 – La...

Classe de seconde
PHYSIQUE CHIMIE
Wulfran Fortin (2019)

PHYSIQUE CHIMIE 2e
ii

Table des matières
1 Description et caractérisation de la matière à l’échelle macroscopique 11.1 Corps purs et mélanges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Composition d’un mélange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Solutions aqueuses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Dosage par étalonnage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Modélisation de la matière à l’échelle microscopique 72.1 Du macroscopique au microscopique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Le noyau de l’atome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Le cortège électronique de l’atome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4 Vers des entités plus stables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.5 Compter les entités dans un échantillon de matière . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Modélisation des transformations de la matière et transfert d’énergie 153.1 Transformation physique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2 Transformation chimique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 Transformation nucléaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.4 Reconnaître le type de transformation à partir de l’équation de réaction . . . . . . . . . . . . 19
4 Mouvement et interactions 214.1 Décrire un mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.2 Modélisation d’une action sur un système . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.3 Principe d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5 Ondes et signaux 295.1 Émission et perception d’un son . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.2 Vision et image . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.3 Signaux et capteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6 Annexes 376.1 Table de la classification périodique des éléments . . . . . . . . . . . . . . . . . . . . . . . . . . 37
iii

PHYSIQUE CHIMIE 2e
iv
Chapitre 1
Description et caractérisation de la matière àl’échelle macroscopique
IntroductionÀ notre échelle, la matière nous apparaîtsous forme solide, liquide ou gazeuse. Elleest constituée d’une même espèce chimiqueou peut être un mélange en apparence ho-mogène ou hétérogène. Le chimiste ou lephysicien va pouvoir analyser la composi-tion de la matière en pesant et mesurantdes volumes de matière.
1.1 Corps purs et mélanges
1.1.1 Corps pur
Définition Un corps pur est composé d’une seuleespèce chimique.
Exemple L’eau distillée ne contient que des molé-cules d’eau H2O, le cuivre pur ne contient que lesatomes de Cu, le dioxygène n’est constitué que demolécules O2.
1.1.2 Mélange
Définition Un mélange contient plusieurs espèceschimiques. Le mélange est homogène si les espèceschimiques ne sont pas discernables. Dans le cascontraire, le mélange est hétérogène.
Exemple L’air, l’eau salée ou sucrée sont des mé-langes homogènes. Le sang, le lait sont des mélangeshétérogènes.
1.1.3 Identification d’espèces chimiques par desmé-thodes physiques
Méthodes physiques Une espèce chimique peutêtre identifiée par
— ses températures de changement d’état— sa masse volumique ρ par rapport à celle de
l’eauLa masse volumique de l’eau vaut ρ = 1.0 g.mL−1.
Masse volumique ρ La masse volumique ρ d’uncorps (solide, liquide ou gaz) est le coefficient deproportionnalité entre sa masse m et son volume V .
m= ρ × V
L’unité de la masse volumique dépend des unitéschoisies pour la masse et le volume. Si m est engramme (g) et V en millilitre (mL) alors ρ est engramme par millilitre (g.mL−1).
1.1.4 Identification d’espèces chimiques par desmé-thodes chimiques
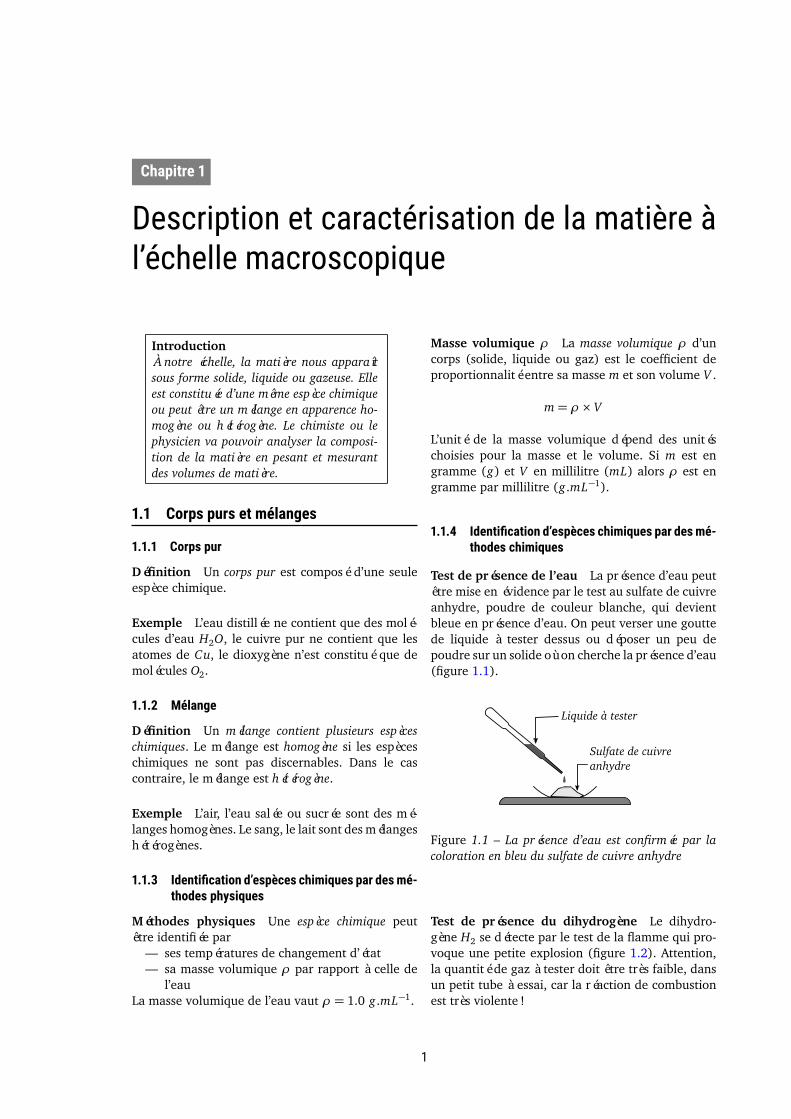
Test de présence de l’eau La présence d’eau peutêtre mise en évidence par le test au sulfate de cuivreanhydre, poudre de couleur blanche, qui devientbleue en présence d’eau. On peut verser une gouttede liquide à tester dessus ou déposer un peu depoudre sur un solide où on cherche la présence d’eau(figure 1.1).
Figure 1.1 – La présence d’eau est confirmée par lacoloration en bleu du sulfate de cuivre anhydre
Test de présence du dihydrogène Le dihydro-gène H2 se détecte par le test de la flamme qui pro-voque une petite explosion (figure 1.2). Attention,la quantité de gaz à tester doit être très faible, dansun petit tube à essai, car la réaction de combustionest très violente !
1

PHYSIQUE CHIMIE 2e
Figure 1.2 – La présence de dihydrogène est confirméepar une explosion. Attention, ce test doit être fait avecde très petites quantités de gaz, l’explosion étant trèsviolente.
Test de présence du dioxygène Le dioxygène sedétecte en plaçant un charbon incandescent dans unrécipient où il y a du dioxygène. Le charbon va s’en-flammer grâce à l’oxygène (figure 1.3).
Figure 1.3 – La présence de dioxygène ravive uneflamme à l’extrémité d’un bout de bois incandescent.
Test de présence du dioxyde de carbone Le di-oxyde de carbone se détecte en faisant barboter legaz dans de l’eau de chaux, qui va se troubler à causede la formation d’un précipité (figure 1.4).
Figure 1.4 – La présence de dioxyde de carbone troublel’eau de chaux où barbote le gaz à tester.
1.2 Composition d’un mélange
1.2.1 Composition en masse
Définition Dans un mélange d’espèces chimiques demasse totale m, une des espèces chimiques a unemasse mi . On calcule alors son pourcentage en massegrâce à la formule
mi
m× 100
qui s’exprime en % mas. Donner la composition enmasse du mélange c’est donner les pourcentages enmasse de tous les composants.
Exemples Une solution contient 5.00 g d’hy-droxyde de sodium NaOH dans 100 g d’eau. Lamasse totale sera m = 100 + 5 = 105 g et donc lepourcentage en masse d’hydroxyde sera
5.00105
× 100= 4.77 % mas
On veut savoir quelles masses de chlorure de sodiumNaCl et d’eau H2O prendre pour avoir 175 g d’unesolution à 15 % mas en chlorure de sodium. Si j’ap-pelle a la masse de chlorure de sodium et b la massed’eau, je peux écrire que la masse totale sera
a+ b = 175 g
Si il y a 15 % mas en chlorure de sodium, je peuxaussi écrire que
b175× 100= 15
En divisant à gauche et à droite par 100 puis en sim-plifiant
b175
= 0.15
et enfin en multipliant à gauche et à droite par 175et en simplifiant
b = 26.25
c’est à dire qu’il faut une masse de chlorure de so-dium b = 26.25 g qu’on dissoudra dans une massea = 175− b = 148.75 g d’eau.
1.2.2 Composition en volume
Définition Dans un mélange d’espèces chimiquesde volume total V , une des espèces chimiques a unvolume Vi . On calcule alors son pourcentage en vo-lume grâce à la formule
Vi
V× 100
qui s’exprime en % vol. Donner la composition envolume du mélange c’est donner les pourcentages envolume de tous les composants.
2
CHAPITRE 1. DESCRIPTION ET CARACTÉRISATION DE LA MATIÈRE À L’ÉCHELLE MACROSCOPIQUE
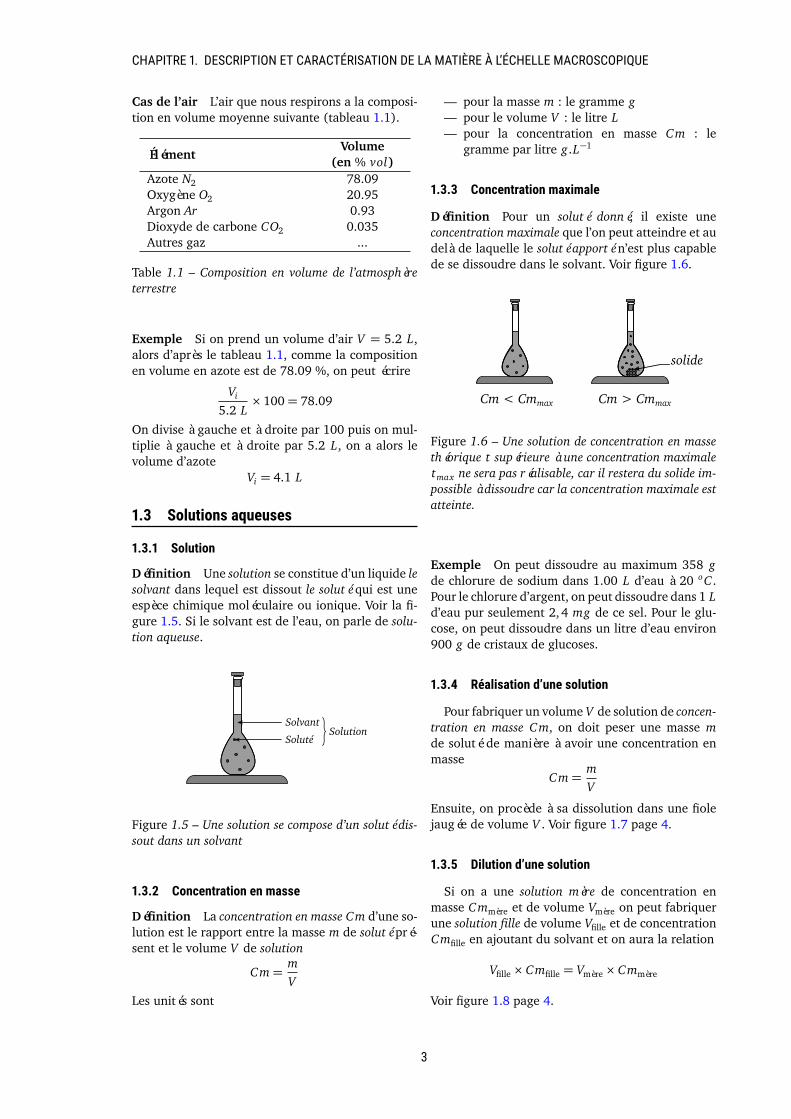
Cas de l’air L’air que nous respirons a la composi-tion en volume moyenne suivante (tableau 1.1).
ÉlémentVolume
(en % vol)Azote N2 78.09Oxygène O2 20.95Argon Ar 0.93Dioxyde de carbone CO2 0.035Autres gaz ...
Table 1.1 – Composition en volume de l’atmosphèreterrestre
Exemple Si on prend un volume d’air V = 5.2 L,alors d’après le tableau 1.1, comme la compositionen volume en azote est de 78.09 %, on peut écrire
Vi
5.2 L× 100= 78.09
On divise à gauche et à droite par 100 puis on mul-tiplie à gauche et à droite par 5.2 L, on a alors levolume d’azote
Vi = 4.1 L
1.3 Solutions aqueuses
1.3.1 Solution
Définition Une solution se constitue d’un liquide lesolvant dans lequel est dissout le soluté qui est uneespèce chimique moléculaire ou ionique. Voir la fi-gure 1.5. Si le solvant est de l’eau, on parle de solu-tion aqueuse.
Figure 1.5 – Une solution se compose d’un soluté dis-sout dans un solvant
1.3.2 Concentration en masse
Définition La concentration en masse Cm d’une so-lution est le rapport entre la masse m de soluté pré-sent et le volume V de solution
Cm=mV
Les unités sont
— pour la masse m : le gramme g— pour le volume V : le litre L— pour la concentration en masse Cm : le
gramme par litre g.L−1
1.3.3 Concentration maximale
Définition Pour un soluté donné, il existe uneconcentration maximale que l’on peut atteindre et audelà de laquelle le soluté apporté n’est plus capablede se dissoudre dans le solvant. Voir figure 1.6.
Figure 1.6 – Une solution de concentration en massethéorique t supérieure à une concentration maximaletmax ne sera pas réalisable, car il restera du solide im-possible à dissoudre car la concentration maximale estatteinte.
Exemple On peut dissoudre au maximum 358 gde chlorure de sodium dans 1.00 L d’eau à 20 oC .Pour le chlorure d’argent, on peut dissoudre dans 1 Ld’eau pur seulement 2, 4 mg de ce sel. Pour le glu-cose, on peut dissoudre dans un litre d’eau environ900 g de cristaux de glucoses.
1.3.4 Réalisation d’une solution
Pour fabriquer un volume V de solution de concen-tration en masse Cm, on doit peser une masse mde soluté de manière à avoir une concentration enmasse
Cm=mV
Ensuite, on procède à sa dissolution dans une fiolejaugée de volume V . Voir figure 1.7 page 4.
1.3.5 Dilution d’une solution
Si on a une solution mère de concentration enmasse Cmmère et de volume Vmère on peut fabriquerune solution fille de volume Vfille et de concentrationCmfille en ajoutant du solvant et on aura la relation
Vfille × Cmfille = Vmère × Cmmère
Voir figure 1.8 page 4.
3

PHYSIQUE CHIMIE 2e
Figure 1.7 – Fabrication d’une solution par dissolution
Figure 1.8 – Fabrication d’une solution par dilution.
4

CHAPITRE 1. DESCRIPTION ET CARACTÉRISATION DE LA MATIÈRE À L’ÉCHELLE MACROSCOPIQUE
1.4 Dosage par étalonnage
1.4.1 Dosage
Définition Faire un dosage en chimie, c’est mesurerla concentration d’une espèce chimique dans une so-lution. Pour mesurer cette concentration, on utilisedes méthodes physiques ou chimiques.
Exemple Les grandeurs que l’on peut utiliser pourmesurer une concentration peuvent être la massevolumique, la couleur, la conductivité électrique, lepH, etc. ...
1.4.2 Étalonnage
Définition Pour réaliser un dosage par étalonnaged’une espèce chimique en solution, on fabrique dessolutions étalons dont on connaît précisément laconcentration et on mesure une grandeur physiquecorrespondant à cette solution. Ensuite, après avoirtracé une courbe d’étalonnage, on mesure la mêmegrandeur physique pour la solution inconnue et onen déduit la valeur de sa concentration par compa-raison.
Exemple Pour doser le saccharose dans 1 L deCoca Cola, on a fabriqué par dissolution quatre solu-tions étalons de 100 mL de concentration en masseprécise dont on mesure ensuite la masse volumiqueρ. On trace la masse volumique en fonction de laconcentration en masse, puis après avoir mesuréla masse volumique du Coca Cola, on en déduit laconcentration en masse en saccharose tCoca Cola =106 g.L−1. Voir figure 1.9.
Figure 1.9 – Dosage par étalonnage de la concentra-tion en masse en saccharose du Coca Cola.
5

PHYSIQUE CHIMIE 2e
6

Chapitre 2
Modélisation de la matière à l’échelle micro-scopique
IntroductionÀ l’échelle microscopique, la matière est dé-crite comme étant un ensemble d’atomesconstitués d’un noyau qui contient des pro-tons et des neutrons, et qui est entouré d’uncortège électronique, dont l’organisation encouches et sous couches permet d’expliquerles propriétés chimiques des éléments du ta-bleau de la classification périodique. Cesatomes pourront s’assembler, entre autre,en molécules. Le chimiste développera desoutils théoriques pour compter rapidementces atomes et ces molécules.
2.1 Du macroscopique au microscopique
2.1.1 Introduction
Toute la matière à notre échelle se composed’atomes de différentes natures groupés en moléculeet en cristaux, puis sous formes de structures de plusen plus complexes pour aboutir aux êtres et objetsde notre quotidien (figure 2.1).
2.1.2 Entités chimiques
Définition Une entité chimique désigne de façongénérale
— un atome— une molécule qui est un ensemble d’atomes re-
liés entre eux— un cation, qui est un ion positif— un anion, qui est un ion négatif
Voir figure 2.2 page 8.
Exemples Les atomes de cuivre Cu, de fer Fe.Une molécule d’eau H2O, une molécule d’acide étha-noïque CH3COOH, un cation Fe3+, un cation H3O+,un anion SO2−
4 , un anion Cl−.
Figure 2.1 – Du macroscopique vers le microscopique
2.1.3 Espèce chimique
Définition Une espèce chimique est un ensemble d’entités chimiques identiques, en très grand nombre.Voir figure 2.2 page 8.
Exemples L’eau liquide est une espèce chimiquequi contient un grand nombre de molécules d’eau,voir la figure 2.3.Le sel de cuisine est une espèce chimique quicontient un grand nombre de cations Na+ etd’anions Cl−, l’or est une espèce chimique quicontient un grand nombre d’atomes d’or Au (Auruml’or en latin).
2.1.4 Électro-neutralité de la matière
Définition À notre échelle, la matière est électrique-ment neutre, toutes les charges électriques positivesse compensent avec le même nombre de chargesélectriques négatives. Les anions et les cations seront
7

PHYSIQUE CHIMIE 2e
Figure 2.2 – De l’espèce chimique vers l’entité chimique
Figure 2.3 – La glace d’eau est une espèce chimiqueconstituée de molécules d’eau régulièrement empilées
donc présents dans des proportions qui permettentd’assurer cette électro-neutralité. Les atomes et lesmolécules ont une charge électrique nulle.
Exemples La neutralité de structures ioniquescomme les sels se fait de manière à ce que les chargesélectriques de tous les cations neutralisent celles detous les anions.Le chlorure de Fer III est utilisé en faible quantitépour le traitement des eaux usées comme floculantqui permet de décanter plus rapidement les finesparticules solides dans les eaux usagées. Sa formuleest FeCl3 et le cristal est un assemblage régulier decations Fe3+ et d’anions Cl−. Les trois charges posi-tives de l’ion Fe3+ sont compensées par une chargenégative de trois ions Cl−
2.2 Le noyau de l’atome
2.2.1 Particules élémentaires
Définition Les particules élémentaires constituantsles atomes sont l’électron, le proton et le neutron. Voirle tableau 2.1 page 8 et le tableau 2.2 page 8.
Particule Masse (en kg )
électron 9.11× 10−31
neutron 1.67× 10−27
proton 1.67× 10−27
Table 2.1 – Masse des particules élémentaires consti-tuant l’atome
Particule Charge électrique (en C)
électron −1.6× 10−19 (on note −1)neutron 0proton 1.6× 10−19 (on note +1)
Table 2.2 – Charges électriques des particules élémen-taires constituant l’atome
2.2.2 L’atome
Définition— L’atome se compose d’un noyau constitué de
neutrons et de protons, autour du quel orbitentdes électrons qui forment le nuage électronique(figure 2.4).
— Un atome est neutre, il y a autant de chargespositives (les protons) que de charges négatives(les électrons).
— la taille d’un atome est de l’ordre de 0.1 nm.Son noyau est 100 000 fois plus petit, soit1 f m.
Figure 2.4 – Structure simplifiée de l’atome
2.2.3 Écriture conventionnelle du noyau
Définition
8

CHAPITRE 2. MODÉLISATION DE LA MATIÈRE À L’ÉCHELLE MICROSCOPIQUE
— On appelle numéro atomique Z le nombre deprotons présents dans le noyau d’un atome oud’un ion monoatomique.
— On appelle nombre de masse atomique A lenombre de protons et de neutrons présentsdans le noyau d’un atome ou d’un ion mono-atomique.
— Le symbole chimique d’un élément est unelettre majuscule, parfois suivie d’une minus-cule permettant de le désigner. Par exemple Creprésente l’élément carbone dont Z = 6, Nareprésente l’élément sodium où Z = 11.
— L’écriture conventionnelle d’un noyau permetd’indiquer son symbole X , son numéro ato-mique Z et son nombre de masse A.
AZ X
Exemples 146 C est un atome de carbone C qui pos-
sède Z = 6 protons et donc N = A− Z = 14− 6 = 8neutrons.
2.2.4 Élément chimique
Définition Un élément chimique est totalement dé-fini par son nombre de protons Z dans son noyauqui lui donne son nom et son symbole X .
Exemples 4520Ca2+ est le cation calcium, il possède
Z = 20 protons et 45−20= 25 neutrons. Comme ila une charge positive 2+, cela signifie que l’atome decalcium a perdu 2 électrons pour devenir le cationCa2+.
2.3 Le cortège électronique de l’atome
Introduction De nombreuses expériences de spec-troscopie du début du XXe siècle ont montré que lesélectrons des atomes semblent être rangés autour dunoyau par couches successives.
Définition— Les électrons du cortège électronique d’un
atome sont répartis dans des couches numéro-tées à partir de 1, et qui contiennent des souscouches désignées par des lettres s et p.
— une sous couche s contient au maximum 2 élec-trons
— une sous couche p contient au maximum 6 élec-trons
— Le remplissage des couches et sous couches sefait par énergie croissante.
Voir la figure 2.5 page 9.
Figure 2.5 – Configuration électronique des 13 élec-trons de l’atome d’aluminium dans son état fondamen-tal
Exemples L’atome d’hydrogène ne possède qu’unseul électron. La configuration électronique del’atome d’hydrogène sera 1s1.L’atome de carbone possède 6 électrons. La confi-guration électronique de l’atome de carbone sera1s22s22p2, et il a 4 électrons de valence sur lacouche 2 composée des sous couches 2s et 2p.
Définition Les électrons de valence sont les élec-trons de la dernière couche remplie. Ces électronsvont donner des propriétés chimiques spécifiques àun élément chimique.
Exemples L’atome d’aluminium a pour structureélectronique 1s22s22p63s23p1, sa dernière coucheremplie est la troisième couche et il a 3 électronsde valence, dont 2 sur la sous couche 3s et 1 sur lasous couche 3p.
2.4 Vers des entités plus stables
2.4.1 Classification périodique des éléments
Définition Les éléments de la classification pério-dique se regroupent en blocs s et p en fonction dunombre de couches remplies. Pour chaque colonnede la classification périodique, les éléments ont lemême nombre d’électrons sur leur couche de va-lence. Voir la figure 2.6 page 10.
Définition Les éléments d’une même colonne du ta-bleau de la classification périodique des élémentsont le même nombre d’électrons de valence, ce qui leuroctroie les mêmes propriétés chimiques : ils forme unefamilles chimiques d’éléments. Chaque colonne cor-respond ainsi à une famille. Voir figure 2.7.
9

PHYSIQUE CHIMIE 2e
Figure 2.6 – Les blocs s et p dans la classification pé-riodique des éléments pour les trois premières lignes
2.4.2 Gaz nobles
Définition La famille des gaz nobles correspond àla dernière colonne du tableau de la classification pé-riodique. Ces éléments ne forment pas de moléculesou d’ions, ils existent simplement sous forme mono-atomique : ils sont dit chimiquement stables, on nepeut pas faire de réactions chimiques.On remarque que leur dernière couche électroniqueest saturée à 8 électrons.
Exemples Configuration électronique des gaznobles des trois premières lignes du tableau de laclassification périodique des éléments (voir table2.3).
Gaz noble Configuration électronique
Hélium 1s2
Néon 1s22s22p6
Argon 1s22s22p63s23p6
Table 2.3 – Configuration électronique des gaz nobles.On observe sur la dernière couche remplie qu’il y a 8électrons : 2 sur la sous couche s et 6 sur la sous couchep.
2.4.3 Ions monoatomiques
Définition Les éléments du tableau de la classifi-cation périodique vont augmenter leur stabilité chi-mique en gagnant ou perdant des électrons pouravoir la configuration électronique du gaz noble leplus proche dans la classification. Voir le tableau 2.4page 11.
Exemple L’atome de sodium Na a pour structureélectronique 1s22s22p63s1. Le gaz noble le plusproche dans la classification périodique est le néonde structure électronique 1s22s22p6. Le sodiumva donc perdre un électron pour avoir la même
configuration électronique que le gaz noble. Onforme alors l’ion Na+ qui a comme configurationélectronique 1s22s22p6.L’atome de chlore Cl a pour configuration1s22s22p63s23p5 et il lui manque seulementun électron pour avoir celles de l’Argon. Il va doncfacilement capturer un électron ailleurs pour formerl’ion chlorure Cl− de configuration électronique1s22s22p63s23p6.À noter que la mise en présence de sodium métal-lique (atomes de Na) et de gaz de dichlore (Cl2)produit une très vive réaction, le chlore arrachantun électron au sodium.
2.4.4 Molécules
Définition Une molécule est un ensemble d’atomesreliés entre eux par des liaisons chimiques qui sontun partage d’une ou plusieurs paires d’électrons afinque chaque atome puisse s’entourer de 8 élec-trons pour avoir la même configuration électroniquequ’un gaz noble. Voir figure 2.8.
Définition En 1916, le physico-chimiste américainGilbert Newton Lewis propose un modèle simplifiépour expliquer la formation des molécules par lepartage de paires d’électrons. Tout atome d’une mo-lécule sera entouré par 4 paires d’électrons lui per-mettant d’avoir sa couche de valence saturée à 8électrons comme un gaz noble. L’atome d’hydrogènen’aura qu’une seule paire d’électrons dans une mo-lécule.Les paires d’électrons servant à faire une liaison se-ront des doublets liants, les paires d’électrons nonengagées dans une liaison seront des doublets nonliants. Voir figure 2.9.
Exemples Dans les schémas suivants, tous lesatomes sont entourés par 4 doublets, liants ou nonliants, seuls les atomes d’hydrogènes sont entourésd’un seul doublet.
— l’eau H O H
— le dioxyde de carbone O C O
— l’ammoniac N
H
H
H
— le méthane H C
H
H
H
— l’éthanol H C
H
H
C
H
H
O H
10

CHAPITRE 2. MODÉLISATION DE LA MATIÈRE À L’ÉCHELLE MICROSCOPIQUE
Figure 2.7 – Les trois premières lignes de la classification périodique. Chaque ligne correspond au remplissaged’une couche électronique, les éléments d’une colonne ont le même nombre d’électrons de valence, les électronsde la dernière couche remplie.
Atome Configurationélectronique
Gaz nobleproche
Ion Configurationélectronique
Hydrogène H 1s1 He Hydronium H+ pas d’électronSodium Na 1s22s22p63s1 Ne Ion sodium Na+ 1s22s22p6
Potassium K 1s22s22p63s23p64s1 Ar Ion potassium K+ 1s22s22p63s23p6
Calcium Ca 1s22s22p63s23p64s2 Ar Ion calcium Ca2+ 1s22s22p63s23p6
Magnésium Mg 1s22s22p63s2 Ne Ion magnésium Mg2+ 1s22s22p6
Chlore Cl 1s22s22p63s23p5 Ar Ion chlorure Cl− 1s22s22p63s23p6
Fluor F 1s22s22p5 Ne Ion fluorure F− 1s22s22p6
Table 2.4 – Les cations se forment en perdant des électrons pour avoir la même configuration électroniquequ’un gaz noble. Les anions se forment en capturant des électrons pour avoir la configuration électronique d’ungaz noble
Figure 2.8 – Partage de deux électrons entre deuxatomes pour former une liaison covalente.
— l’éthylène CH
HC
H
H
— l’acide acétique H C
H
H
CO
O H
— le dichlore Cl Cl
Figure 2.9 – Formation de liaisons covalentes dansl’acide cyanhydrique. Chaque atome s’entoure de huitélectrons en formant une ou plusieurs liaisons cova-lentes.
11

PHYSIQUE CHIMIE 2e
— le dihydrogène H H— le dioxygène O O— l’acide chlorhydrique Cl H
2.4.5 Énergies de liaison
Définition L’énergie de liaison est l’énergie néces-saire pour briser cette liaison. Lors d’une réactionchimique, des liaisons se brisent et se reformentpour obtenir de nouvelles molécules à partir desatomes présents au début.
2.5 Compter les entités dans un échantillonde matière
2.5.1 Masse d’une entité chimique
Définition La masse me d’une molécule ou d’union polyatomique est la somme des masses desatomes qui constituent cette entité. On doit doncconnaître la formule brute de l’entité.La masse des atomes des trois premières lignes dela classification périodique des éléments est donnéedans le tableau 2.5.
Exemple La molécule d’eau a pour formule bruteH2O. Elle se compose de deux atomes d’hydrogèneet d’un atome d’oxygène. Sachant que la masse d’unatome d’hydrogène est mH = 1.674×10−24 g et celled’un atome d’oxygène est mO = 2.657×10−23 g, onpeut calculer la masse de la molécule d’eaux
mH2O =2×mH + 1×mO
=2× 1.674× 10−24 g
+ 1× 2.657× 10−23 g
=2.992× 10−23 g
Exemple La molécule d’éthanol a pour formulebrute CH3CH2OH. Les masses des différents atomessont mH = 1.674× 10−24 g, mO = 2.657× 10−23 get mC = 1.995× 10−23 g. La masse d’une moléculed’éthanol sera alors
mCH3CH2OH =6×mH + 1×mO + 2×mC
=6× 1.674× 10−24 g
+ 1× 2.657× 10−23 g
+ 2× 1.995× 10−23 g
=7.651× 10−23 g
2.5.2 Nombre d’entités dans un échantillon
Définition Si on a un échantillon composé d’unnombre N d’entités identiques ayant une masse indi-viduelle me, alors la masse totale m de l’échantillon
sera le produit du nombre d’entités par la massed’une entité
m= N ×me
Définition Si on connaît la masse m de l’échan-tillon et la masse individuelle des entités me, alorson peut calculer à partir de l’équation précédente lenombre N d’entités composant notre échantillon enisolant ce paramètre
m= N ×me
mme=
N ×me
me
mme=
N ×HHme
HHmemme= N
Exemple Un morceau de tube de cuivre a unemasse m de 1.5 kg. Un atome de cuivre a une massede mCu = 1.055 × 10−22 g. On va déterminer lenombre d’atomes de cuivre présents dans ce tube.On utilise donc la formule N = m
mCuen faisant atten-
tion aux unités :
m= 1.5 kg = 1500 g
donc le nombre d’atomes de cuivre est
N =1500 g
1.055× 10−22= 1.42× 1025
On constate que ce nombre est énorme
N = 14 500 000 000 000 000 000 000 000
2.5.3 La mole
Définition Pour compter plus rapidement les en-tités présentes dans un échantillon, on les comptepar paquet contenant NA = 6.022× 1023 entités. Cepaquet est appelé une mole.
Exemple Si j’ai 5 mol d’une espèce chimique, alorsmon échantillon contient un nombre totale d’entitésvalant N = 5× NA = 3.011× 1024.
Exemple Nous allons estimer le volume occupépar une mole de popcorn, en supposant qu’un grainoccupe le volume d’un cube de 2 cm d’arête. Onconvertit les distances en km puis on calcule de vo-lume du cube en km3
Vgrain = (2.00 cm)3 =
2.00× 10−5 km3
Vgrain = 8.00× 10−15 km3
On calcule le volume occupé par la mole de popcorn
V = Vgrain × 6.022× 1023 = 4.8× 109 km3
12

CHAPITRE 2. MODÉLISATION DE LA MATIÈRE À L’ÉCHELLE MICROSCOPIQUE
La superficie de la France est de S = 643801 km2,il faudrait une hauteur h de pop-corn pour avoir levolume
V = h× S
et donc
h=4.80× 109 km3
643801 km2= 7500 km
Voir figure 2.10 page 13.
Figure 2.10 – Une mole de popcorn couvrirait laFrance sur 7500 km de haut
2.5.4 Quantité de matière
Définition La quantité de matière n contenue dansun échantillon est le «nombre de paquets» contenant6.022×1023 entités présent dans l’échantillon. Cettequantité de matière n s’exprime en mol.Pour calculer n, il faut connaître le nombre total Nd’entités de l’échantillon et on peut alors calculer n
n=NNA
Définition Pour mesurer expérimentalement laquantité de matière n présente dans un échantillon,il faut connaître
— la formule brute de l’entité chimique consti-tuant l’espèce chimique
— la masse m de notre échantillon.Ensuite, on applique les étapes de calculs de l’algo-rithme (voir figure 2.11).
Figure 2.11 – Étapes du calcul d’une quantité de ma-tière n connaîssant la masse m de l’échantillon et laformule brute des entités
13

PHYSIQUE CHIMIE 2e
Z Symbole Nom Masse (en g)
1 H hydrogène 1.674× 10−24
2 He hélium 6.647× 10−24
3 Li lithium 1, 152× 10−23
4 Be béryllium 1, 497× 10−23
5 B bore 1, 795× 10−23
6 C carbone 1, 995× 10−23
7 N azote 2, 326× 10−23
8 O oxygène 2, 657× 10−23
9 F fluor 3, 155× 10−23
10 Ne néon 3, 351× 10−23
11 Na sodium 3, 818× 10−23
12 Mg magnésium 4, 036× 10−23
13 Al aluminium 4, 481× 10−23
14 Si silicium 4, 664× 10−23
15 P phosphore 5, 143× 10−23
16 S souffre 5, 324× 10−23
17 Cl chlore 5, 887× 10−23
18 Ar argon 6, 634× 10−23
Table 2.5 – Masse des atomes des trois premières lignes du tableau de la classification périodique
14

Chapitre 3
Modélisation des transformations de la ma-tière et transfert d’énergie
IntroductionLa matière peut se transformer en libérantou absorbant de l’énergie.Une transformation physique n’est qu’unchangement de phase, solide, liquide ou ga-zeux, durant lequel les molécules de la ma-tière restent intactes.Une transformation chimique transformeles molécules en modifiant la répartitiondes atomes entre diverses molécules.Une transformation nucléaire modifie lenoyau même de l’atome.
3.1 Transformation physique
3.1.1 Changement d’état
Définition Un corps pur peut être dans trois étatsphysiques en fonction de sa température et de lapression
— solide— liquide— gazeux
Le passage d’un état à l’autre se fait à des tempéra-tures précises selon le corps étudié, appelées tempé-ratures de changement de phase.
Exemples L’eau peut être sous forme liquide, so-lide (glace, neige, givre) ou à l’état de vapeur (voirfigure 3.1).
Définition Le passage d’une phase à l’autre porteun nom spécifique, selon la phase de départ et celled’arrivée ( voir figure 3.2).
Remarque La vaporisation est une évaporationavec ébullition du corps.
Figure 3.1 – Les changements d’états de l’eau à pres-sion atmosphérique
Figure 3.2 – Noms des différents types de changementsd’états
3.1.2 Modélisation microscopique
Définition On peut modéliser les trois phases dela matière de la façon suivante
— Dans un corps pur solide, les atomes, ions oumolécules qui le constituent sont organisésdans une structure cristalline qui est très ordon-née et régulière.
— Dans un corps pur liquide, les atomes, ions
15

PHYSIQUE CHIMIE 2e
ou molécules qui le constituent sont dans unestructure désorganisée, ils peuvent se déplacerles uns par rapport aux autres, en restant trèsproches.
— Dans un corps pur gazeux, les atomes, ionsou molécules qui le constituent sont dans unestructure désorganisée, ils se déplacent à des vi-tesses importantes et sont éloignés les uns desautres.
Définition Pour un changement d’état, lors du pas-sage sol ide→ l iquide→ gaz, la structure de la ma-tière est de plus en plus désordonnée.Le passage gaz → l iquide → sol ide se caractérisepar un état de plus en plus ordonné de la matière.
Voir figure 3.3.
Figure 3.3 – Structure de la matière dans les phasessolide, liquide et gaz
3.1.3 Transfert thermique
Définition Une transformation endothermiqueabsorbe de l’énergie E quand elle se produit.
corpssolide + Efusion−−−→ corpsliquide
corpsliquide + Evaporisation−−−−−−→ corpsgaz
corpssolide + Esublimation−−−−−−→ corpsgaz
Une transformation exothermique libère de l’énergieE quand elle se produit.
corpsliquidesolidification−−−−−−→ corpssolide + E
corpsgazliquéfaction−−−−−−→ corpsliquide + E
corpsgazcondensation solide−−−−−−−−−−→ corpssolide + E
Définition L’énergie de fusion E f (en J) est l’éner-gie nécessaire pour faire fondre une masse m (en kg)d’un corps pur d’énergie massique de fusion L f (enJ .kg−1).
E f = m× L f
Quand le corps se solidifie, il va libérer la mêmeénergie.
L’énergie de vaporisation Ev (en J) est l’énergie né-cessaire pour vaporiser une masse m (en kg) d’uncorps pur d’énergie massique de vaporisation Lv (enJ .kg−1).
Ev = m× Lv
Quand le corps se liquéfie, il va libérer la même éner-gie.
3.1.4 Applications des changements d’états
— Quand on utilise une glacière, on y place desblocs de glace qui absorbent l’énergie ther-mique entrant dans la glacière. Tant que laglace se transforme en eau,cette énergie nepeut pas augmenter la température des objetsdans la glacière.
— Les petites chaufferettes qui se déclenchentpar un choc et où l’on observe un liquide de-venant solide utilisent une espèce chimique ensurfusion, et quand elle change de phase, ellelibère l’énergie sous forme thermique.
— Certains mammifères transpirent, l’eau ens’évaporant absorbe l’énergie thermique ducorps et permet de le refroidir.
— Dans les années 1970 les sondes russes VE-NERA qui atterrissaient à la surface de Vénusoù la température est de 400 oC , utilisaient lasublimation de nitrate de lithium tri hydratépour absorber l’énergie thermique qui entraitdans la sonde.
— Les sondes spatiales utilisent un bouclier ther-mique pour entrer dans une atmosphère, lebouclier se sublime, ce qui permet d’évacuerune partie de l’énergie thermique due au frot-tement avec l’atmosphère, la sonde perd ainside l’énergie cinétique et est ralentie, passantà une vitesse de quelques kilomètres par se-conde à quelques centaines de mètre par se-conde.
3.2 Transformation chimique
3.2.1 Réaction chimique
Définition Lors d’une réaction chimique, les réac-tifs disparaissent pour former les produits qui appa-raissent. Il y a conservation de la matière, la masse
16

CHAPITRE 3. MODÉLISATION DES TRANSFORMATIONS DE LA MATIÈRE ET TRANSFERT D’ÉNERGIE
reste constante, et conservation de la charge élec-trique, elle reste constante lors de la réaction.
réactifs −→ produits
masse des réactifs=masse des produits
somme des charges électriques des réactifs=somme des charges électriques des produits
3.2.2 Équation de réaction chimique
Définition Une équation de réaction chimique in-dique comment les atomes se réorganisent quanddes réactifs réagissent pour former des produits.Cette équation respecte la conservation de la masse :tous les atomes présents dans les réactifs se retrouventdans les produits et la conservation de la charge élec-trique : la charge électrique totale de tous les réac-tifs est identique à la charge totale de tous les pro-duits. Une équation de réaction chimique est équili-brée, les coefficients stoechiométriques indiquent enquelles proportions les réactifs réagissent entre euxet les produits apparaissent.
Exemples à connaître— combustion du carbone
C +O2 −→ CO2
— combustion du méthane
CH4 + 2×O2 −→ CO2 + 2×H2O
— corrosion d’un métal par un acide
Zn+ 2×H3O+ −→ Zn2+ +H2 + 2×H2O
— action d’un acide sur le calcaire
2×HCl + CaCO3 −→ CaCl2 + CO2 +H2O
— action de l’acide chlorhydrique sur l’hy-droxyde de sodium
H3O++Cl−+Na++OH− −→ 2×H2O+Cl−+Na+
Les ions Na+ et Cl− sont des espèces specta-trices, elles ne participent pas à la réaction chi-mique.
3.2.3 Recherche du réactif limitant
Définition Le réactif limitant est le réactif qui vadisparaître en premier lors d’une réaction chimique,et c’est donc lui qui va arrêter la réaction.
Méthode Pour rechercher le réactif limitant d’uneréaction dont on connaît l’équation de réaction équi-librée, il faut
— calculer le nombre de moles de chaque réactifprésent au début de la réaction
— diviser ce nombre de mole par le coefficientstoechiométrique correspondant au réactif
— le réactif ayant le plus petit rapport sera lerréactif limitant la réaction, les autres seronten excès
Exemple On a une réaction de combustion entrele dioxygène O2 et le butane C4H10, dont l’équationde réaction est
C4H10 +132×O2 −→ 4× CO2 + 5×H2O
Initialement, on a 0.42 mol de butane et 0.23 molde dioxygène. On recherche le réactif limitant en ap-pliquant la méthode décrite ci-dessus.
— n(O2) = 0.23 mol, et nbutane = 0.42 mol— 0.23
132= 0.0354 et 0.42
1 = 0.42
— le rapport le plus petit est celui correspondantau dioxygène
Le réactif limitant est le dioxygène.
3.2.4 Réactions exothermiques et endothermiques
Définition Si lors d’une réaction chimique, del’énergie est dégagée (lumière, chaleur) alors laréaction est exothermique.Si lors d’une réaction chimique, de l’énergie estabsorbée (diminution de la température) alors laréaction est endothermique.
Exemple Les réactions de combustion sont exo-thermiques, elles sont utilisées depuis longtemps parles Hommes pour se chauffer, s’éclairer et cuire desaliments.
3.2.5 Synthèse d’une espèce chimique
Définition Synthétiser une espèce chimique, c’estfabriquer cette espèce par une suite de réactionschimiques, de méthode de purification, de sépara-tion, d’extractions et de caractérisations. L’espècechimique peut être une copie d’une espèce naturelleou une création de l’Humain. On peut utiliser un sys-tème de chauffage à reflux pour faire une synthèse.Voir figure 3.4.
Définition La chromatographie sur couche minceest une technique de séparation des composantsdans un but d’analyse ou de purification. Elle com-prend une phase stationnaire (usuellement du gel desilice, de l’oxyde d’aluminium ou de la cellulose) et
17

PHYSIQUE CHIMIE 2e
Figure 3.4 – Montage d’un chauffage à reflux
une phase liquide, dite phase mobile ou éluant quiest un solvant ou un mélange de solvants qui va en-traîner les composés à se séparer le long de la phasestationnaire. Voir figure 3.5.
Figure 3.5 – Caractérisation par chromatographie surcouche mince. On sépare les constituants d’un mélangegrâce à l’entraînement par un éluant des différentesespèces à des vitesses différentes et on compare à desespèces pures.
3.3 Transformation nucléaire
3.3.1 Isotope
Définition Les isotopes sont des noyaux d’atomespossédant le même nombre de proton Z mais unnombre de neutrons différents. Ils ont donc lesmêmes propriétés chimiques, mais des masses trèslégèrement différentes.
Exemples Quelques isotopes de l’élément Titane(Z = 22)
— 46Ti possède 22 protons et 46− 22= 24 neu-trons
— 47Ti possède 22 protons et 47− 22= 25 neu-trons
— 48Ti possède 22 protons et 48− 22= 26 neu-trons
L’argon 40 (40Ar)et le calcium 40 (40Ca) ne sont pasdes isotopes, car leur nombre de protons Z est diffé-rent : Z = 18 pour l’argon et Z = 20 pour le calcium.
3.3.2 Réaction nucléaire
Définition Une réaction nucléaire va modifier lenoyau de l’atome, son nombre de protons Z et sonnombre de nucléons A vont être modifiés. L’élémentva changer puisque Z change.
3.3.3 Écriture symbolique d’une réaction nucléaire
Définition On peut décrire une réaction nucléairepar une équation de réaction qui explicite la manièredont les noyaux atomiques changent, tout en respec-tant des règles de conservations (règles de Soddy)
A1Z1
X1 +A2Z2
X2 −→A3Z3
Y3 +A4Z4
Y4
— la masse doit se conserver A1 + A2 = A3 + A4— la charge électrique doit se conserver Z1+Z2 =
Z3 + Z4
Exemple Désintégration du carbone 14 pour for-mer de l’azote et éjecter un électron e−
146 C −→ 14
7 N + 0−1e−
Remarque Dans les réactions nucléaires, des par-ticules peuvent être éjectées (neutron, proton, élec-tron et positron). On va utiliser les notations sui-vantes pour tenir compte de leur charge et leurmasse (voir tableau 3.1).
3.3.4 Réaction de fusion nucléaire
Définition Au cœur du Soleil se produisent des ré-actions de fusion nucléaires qui dégagent une énormeénergie. Elles fusionnent des noyaux d’atomes pourformer des noyaux plus lourds.
18

CHAPITRE 3. MODÉLISATION DES TRANSFORMATIONS DE LA MATIÈRE ET TRANSFERT D’ÉNERGIE
Nom A Z Notation
Proton 1 1 11p
Neutron 1 0 10n
Électron 0 -1 0−1e
Positron 0 1 01e
Table 3.1 – Particules intervenant dans des réactionsnucléaires
Exemples Quelques réactions de fusions nu-cléaires se produisant dans le Soleil
— 11H + 1
1H −→ 21H + 0
1e+
— 21H + 1
1H −→ 32He
— 32He+ 4
2He −→ 74Be
— 74Be+ 1
1H −→ 85B
— 126 C + 1
1H −→ 137 N
3.3.5 Réaction de fission nucléaire
Définition Au cœur d’une centrale nucléaire, desréactions de fission permettent de casser des noyauxatomiques pour former des noyaux plus légers, etelles dégagent beaucoup d’énergie, utilisée pour fa-briquer de la vapeur permettant de faire tourner desturbines reliées à des alternateurs qui transformentle mouvement en énergie électrique.
Exemples Un neutron 10n vient frapper le noyau
d’un atome d’Uranium 235 235U qui va se briser pourformer des noyaux plus légers de Krypton et de Ba-ryum et en éjectant 3 neutrons.
10n+ 235
92 U −→ 13956 Ba+ 94
36Kr + 3× 10n
3.4 Reconnaître le type de transformation àpartir de l’équation de réaction
Définition— une transformation physique ne change pas les
molécules, elles restent identiques
H2O(s) −→ H2O(g)
— une transformation chimique change les molé-cules mais pas les atomes, ils sont ré-arrangésdifféremment dans de nouvelles molécules
2H2(g) +O2(g) −→ 2H2O(g)
— une transformation nucléaire modifie le noyaudes atomes, la nature chimique de l’élémentchange
21H + 1
1H −→ 32He
Énergies libérées Les énergies libérées lors desdifférents types de transformations sont très diffé-rentes, voici quelques ordres de grandeurs
— transformation physique de 102 à 103 kJ .kg−1
— transformation chimique de 104 à 105 kJ .kg−1
— transformation nucléaire de l’ordre de1011 kJ .kg−1
Exemple— 1 g de pétrole libère 4×104 J lors de sa com-
bustion, soit 104 kJ .kg−1
— la fusion d’1 g d’hydrogène dans le Soleil li-bère 6× 1011 J soit 1012 kJ .kg−1
19

PHYSIQUE CHIMIE 2e
20

Chapitre 4
Mouvement et interactions
IntroductionLa dynamique est l’étude de la modificationdu mouvement d’un objet du fait de l’inter-action de ce dernier avec le reste de l’Uni-vers.Les interactions seront décrites par desforces, l’étude du mouvement s’appelle lacinématique, on y décrit la trajectoire del’objet ainsi que l’évolution de sa vitesse.
4.1 Décrire un mouvement
4.1.1 Exemples de mouvements
Les types d’objets et de mouvements étudiés enphysique sont très variés
— la Terre décrit une ellipse d’environ 150 mil-lions de km de rayon en 1 an autour du Soleil
— une plaque tectonique se déplace par rapportà une autre de quelques centimètres par an.
— un électron d’un microscope électronique sedéplace à plusieurs milliers de kilomètre parseconde
— une molécule dans un gaz à température am-biante se déplace à quelques centaines demètre par seconde
— un humain en marche normale se déplace à4 km.h−1
— la station spatiale internationale ISS est en or-bite basse à 400 km d’altitude et fait le tour dela Terre en 1h 30min
4.1.2 Système et référentiel
Définition Un système est l’objet (ou le grouped’objet) dont on va décrire le mouvement. Il subitl’influence du reste de l’Univers.
Définition Pour décrire un mouvement, on doitpouvoir mesurer la position du système à chaque ins-tant. On doit donc choisir un autre objet de référencepar rapport au quel on pourra mesurer la positionde notre système. Mathématiquement, on choisira
un repère orthonormé associé à une origine fixé sur leréférentiel. Voir figure 4.1.
Figure 4.1 – Le système étudié est une fusée au décol-lage. Son mouvement est mesuré par rapport au sol enfonction du temps. On peut alors définir des coordon-nés (x , y, z) de la fusée à chaque instant t.
4.1.3 Relativité du mouvement
Définition Le choix du référentiel est important,car il conditionne la description du mouvement. Lemouvement est relatif au référentiel choisi.
Exemples— Quand on étudie le mouvement d’un passager
d’un train, il semble immobile par rapport aufauteuil mais être en déplacement par rapportà un arbre à coté de la voie.
— Dans un film, on utilise cet effet lors d’un tra-veling où la caméra suit les acteurs dans lascène en roulant sur des rails ou à bord d’unvéhicule.
4.1.4 Modèle du point matériel
Définition On utilise un modèle simplifié d’un ob-jet dont on veut décrire le mouvement. L’objet se ré-sume à un point où toute sa masse se trouve concen-trée. Ce point s’appelle le centre d’inertie CI. La po-sition de ce point dans l’espace nécessite trois coor-donnés C I (x , y, z).
21

PHYSIQUE CHIMIE 2e
Ce modèle a ses limites, on a perdu toute informa-tion concernant l’orientation de l’objet dans l’espaceet toute information concernant les points d’appli-cations des forces. Voir figure 4.2.
(a) (b)
poids
frottements
(c)
Figure 4.2 – Une capsule Apollo chute dans l’atmo-sphère (a), elle subit une force d’attraction vers laTerre et des forces de frottement sur son bouclier ther-mique (b), on simplifie la description avec le modèledu point matériel, où la capsule se résume à une masseponctuelle de 5900 kg soumise à deux forces.
Définition Les positions successives dans l’espacedu centre d’inertie de l’objet décrit une courbe ap-pelée une trajectoire. On y indique des positions(x , y, z) à des dates précises t. Voir figure 4.3.
Figure 4.3 – La trajectoire d’un point matériel est lacourbe définie par les positions successives de l’objet aucours de son mouvement décrit dans un référentiel
Exemples de trajectoires— trajectoire rectiligne— trajectoire circulaire— trajectoire parabolique
4.1.5 Vecteur déplacement
Définition Soient deux points consécutifsM1(x1, y1) et M2(x2, y2) sur une trajectoire àdes instants voisins séparés d’une durée ∆t . Onappelle vecteur déplacement le vecteur
−−−→M1M2 = (x2 − x1)
−→i + (y2 − y1)
−→j
=∆x−→i +∆y
−→j
Voir figure 4.4.
Figure 4.4 – Le vecteur déplacement permet de passerdu point M1 de la trajectoire au point M2
Exemple Sur la figure 4.4, on mesure les coordon-nées des points M1(1.5,2.4) et M2(3.5, 1.7). On peutensuite calculer le vecteur déplacement
−−−→M1M2 = (3.5− 1.5)
−→i + (1.7− 2.4)
−→j
= 2.0−→i − 0.7
−→j
On a un déplacement de ∆x = 2.0 m vers la droiteet de ∆y = −0.7 m vers le bas.
4.1.6 Vecteur vitesse moyenne
Définition Le vecteur vitesse moyenne−→V peut se
calculer entre deux points séparés d’une durée ∆t àpartir du vecteur déplacement (voir figure 4.5).
−→V =
1∆t−−−→M1M2
=1∆t−−−→M1M2
=1∆t
(x2 − x1)−→i + (y2 − y1)
−→j
=(x2 − x1)∆t
−→i +
(y2 − y1)∆t
−→j
=∆x∆t−→i +
∆y∆t−→j
= Vx−→i + Vy
−→j
avec Vx =∆x∆t
la vitesse selon l’axe Ox et Vy =∆y∆t
la vitesse selon l’axe O y .
Exemple Sur la figure 4.5, on peut mesurer le
vecteur déplacement−−−→M1M2 = 2.0
−→i − 0.7
−→j et on
connaît la durée qui sépare deux positions succes-sives sur la trajectoire ∆t = 50 ms = 50 × 10−3 s.
22

CHAPITRE 4. MOUVEMENT ET INTERACTIONS
Figure 4.5 – Le vecteur vecteur vitesse moyenne se cal-cule à partir du vecteur déplacement entre deux pointsde la trajectoire séparés par une durée ∆t
On peut alors calculer les coordonnées du vecteurvitesse moyenne
Vx =∆x∆t=
2.050× 10−3 s
= 40 m.s−1
Vy =∆y∆t=
−0.750× 10−3 s
= −14 m.s−1
Donc−→V = 40
−→i − 14
−→j
et
V =q
V 2x + V 2
y =Æ
(40)2 + (−14)2 = 43m.s−1
4.1.7 Vecteur vitesse en un point
Définition Le vecteur vitesse en un point −→vM a pournorme la vitesse moyenne entre le point M et lepoint suivant M ′ c ’est à dire le rapport entre la dis-tance parcourue de M à M ′ et la durée de ce par-cours ∆t
‖−→vM‖=M M ′
∆t−→vM a pour sens le sens du mouvement et a pour di-rection la tangente à la trajectoire au point M .
Remarque Cette méthode est imprécise, si la vi-tesse varie beaucoup sur l’intervalle M M ′. Il existed’autres méthodes d’estimation de la vitesse au pointM plus précises mais plus complexes à mettre enœuvre.
Exemple Sur la figure 4.6, on peut mesurer lescoordonnées des points M1(1.5,2.4) et M2(3.5, 1.7)ainsi que l’intervalle de temps entre deux positionssuccessives sur la trajectoire ∆t = 50 ms = 50 ×10−3 s. On peut alors calculer la norme du vecteur
Figure 4.6 – Le vecteur vitesse au point M1 se calculeà partir de la vitesse moyenne entre les points M1 etM2 et se dessine au point M1 tangent à la trajectoire,dans le sens du mouvement
vitesse au point M1.
‖−→vM1‖=
M1M2
∆t
=
p
(3.5− 1.5)2 + (1.7− 2.4)2 m50× 10−3s
= 42 m.s−1
La vitesse au point M1 a pour norme 42 m.s−1, esttangente à la trajectoire au point M1 et est orientéedans le sens du mouvement, vers M2.
4.1.8 Mouvement rectiligne
Définition Un mouvement est dit rectiligne uni-forme si le vecteur vitesse en un point est constantdans le temps.
V = constant
x = V × t + x0
Un mouvement est dit rectiligne non uniforme si levecteur vitesse en un point varie dans le temps ennorme ou en sens mais pas en direction. Par exemple
V = a× t + V0
x =12× a× t2 + V0 × t + x0
Voir figure 4.7.
Exemples— une glissade sur une surface horizontale est un
mouvement rectiligne uniforme— une chute libre sans frottement est un mouve-
ment rectiligne accélérée— une chute sous un parachute est un mouve-
ment rectiligne uniforme— une bille en acier qui tombe dans la neige a
un mouvement rectiligne non uniforme (dé-célération)
23

PHYSIQUE CHIMIE 2e
Figure 4.7 – La figure a) représente un mouvementrectiligne et uniforme, l’objet se déplace en ligne droiteà vitesse constante. La figure b) représente un mou-vement rectiligne non uniforme, l’objet se déplace enligne droite mais sa vitesse varie, ici, elle augmente,l’objet accélère.
4.2 Modélisation d’une action sur un sys-tème
4.2.1 Action sur un système
Définition On définit en premier le système étudié.Il va subir l’action d’un autre système. Les systèmessont des objets dont on veut étudier la dynamique,c’est à dire la façon dont leur mouvement va changersous l’action d’autres objets. Voir figure 4.8.
Figure 4.8 – Le système étudié va subir des actions dela part des autres objets de l’Univers.
Définition Une action sur un système va être mo-délisée mathématiquement par un vecteur force
−→F
dont on doit préciser— la direction— le sens— la norme F qui s’exprimera en Newton N
Comme nous considérons que le système se résumeà un point matériel, le point d’application de la force−→F sera le point.
Exemple Le système étudié est une boite de massem= 500 g posée sur une table, elle subit l’action dela Terre modélisée par le vecteur force poids
−→P et
l’action de la table modélisée par le vecteur réactionde la table
−→R . Voir figure 4.9.
Figure 4.9 – Le système étudié est une boite posée surune table et sous l’influence de la Terre (figures a etb). On modélise la boite par un objet ponctuel soumisaux forces
−→P et
−→R (figure c).
Méthode Pour modéliser les actions, il faut suivreles étapes suivantes
1. Définir précisément le système étudié qui vasubir de la part de l’extérieur des actions quiseront modélisées par des vecteurs forces
2. Faire l’inventaire de l’ensemble des actions ex-térieures appliquées au système étudié
3. Pour chaque action, définir précisément le vec-teur force, c’est à dire qu’il faut donner sonsens, sa direction et sa norme, la norme étantexprimée en Newton (N)
4. Sur un schéma simplifié du système étudié(modèle du point matériel), dessiner précisé-ment l’ensemble des forces, en respectant leursens, leur direction et leur norme, on indi-quera alors une échelle pour dessiner des vec-teurs forces.
4.2.2 Principe des actions réciproques - 3e loi deNewton
Définition On étudie un système A qui subit uneforce
−−→FB/A de la part d’un système B. Si on considère
le système B, il subit de la part du système A uneforce
−−→FA/B. Le principe des actions réciproque dit alors
que−−→FB/A = −
−−→FA/B
Voir figure 4.10.
4.2.3 Exemples d’interactions de contact
Définition Une interaction de contact nécessite queles deux systèmes soient en contact.
24

CHAPITRE 4. MOUVEMENT ET INTERACTIONS
Figure 4.10 – Si le système étudié est l’objet B alorsl’objet A exerce une force sur l’objet B
−−→FA/B. Si le sys-
tème étudié est l’objet A alors l’objet B exerce une forcesur l’objet A
−−→FB/A. D’après le principe des actions réci-
proques−−→FB/A = −
−−→FA/A
Exemple— Une brique est suspendue à un fil. Elle subit de
la part du fil une force de traction−→T dirigée
le long du fil, orientée vers le fil.— Une brique est posée sur une table. Elle subit
de la part de la surface une force de réaction−→R dirigée perpendiculairement à la surface,orientée vers l’objet posé.
Voir figure 4.11.
Figure 4.11 – Les interactions de contact nécessitentque les objets interagissants se touchent.
4.2.4 Exemples d’interactions à distance
Définition Une interaction à distance ne nécessitepas que les deux systèmes soient en contact.
Définition Un objet de masse m placé à proximitéde la surface d’une planète subit une force
−→P appe-
lée le poids qui est une force verticale, dirigée vers
le centre de la planète. La norme du poids se calculepar la relation
P = m× g
avec— P en Newton N— m en kilogramme kg— g accélération de pesanteur, dépend de la pla-
nète, en N .kg−1
Voir figure 4.13.
Figure 4.12 – Le poids d’un objet de masse m est uneforce d’interaction à distance que l’objet subit à proxi-mité de la surface d’une planète.
Exemple Un objet possède une masse m = 500 g.On peut calculer son poids à la surface de différentesplanètes connaissant la valeur de l’accélération depesanteur g sur ces planètes. Il faudra faire attentionlors du calcul aux unités à respecter et donc conver-tir la masse de l’objet en kilogrammes. Voir tableau4.1.
Planète g (N .kg−1) P (N)Terre 9.81 4.9Mars 3.7 1.9Lune 1.6 0.8Comète 5× 10−4 2.5× 10−4
Table 4.1 – Valeurs du poids d’un objet de 500 g à lasurface de différents astres
Figure 4.13 – Le poids d’un objet de masse m est uneforce d’interaction à distance que l’objet subit à proxi-mité de la surface d’une planète.
25

PHYSIQUE CHIMIE 2e
Définition Un objet A de masse M , placé à une dis-tance d d’un autre objet B de masse m subit une forced’attraction gravitationnelle
−−→FB/A
— dont la direction est la droite passant par lescentres d’inertie des deux objets
— orientée de l’objet de masse m vers l’objet demasse M (force attractive)
— dont la norme est donnée par la formule
F =G ×m×M
d2
Les unités à respecter sont— F en Newton N— m et M en kilogramme kg— d en mètre m— G = 6.67× 10−11 N .m2.kg−2
Voir figure 4.14.
Figure 4.14 – Le système étudié est un objet A de masseM qui subit de la part d’un objet B de masse m uneforce d’attraction gravitationnelle
−−→FB/A
Exemple Soit deux objets de masse M = 10 kget m = 1 kg disposés à d = 2 m l’un de l’autre.On peut calculer la valeur de la force d’attractiongravitationnelle entre les deux corps massifs
F =G ×m×M
d2
=6.67× 10−11 × 1.0× 10
2.02
= 1.67× 10−10 N
Soit un satellite de masse M = 1 t situé à une dis-tance d = 100 000 km de la Terre qui a une masseM = 5.972 × 1024 kg. On peut calculer la valeurde la force d’attraction gravitationnelle que subit cesatellite. Pour faire ce calcul, il faudra convertir lesmasses en kilogramme, et les distances en mètre.
F =G ×m×M
d2
=6.67× 10−11 × 5.972× 1024 × 1000
1000000002
= 40 N
4.3 Principe d’inertie
4.3.1 Énonce
Définition— Si la somme des forces extérieures que subit un
objet est nulle, alors ce corps garde un vecteurvitesse constant.
— Si un corps a un vecteur vitesse qui varie, alorscela signifie que la somme des forces extérieuresqu’il subit n’est pas nulle.
4.3.2 Cas du point immobile
Définition Pour un point immobile— la somme des forces extérieures est nulle— le vecteur vitesse reste nul
−→V =
−→0
Voir figure 4.15.
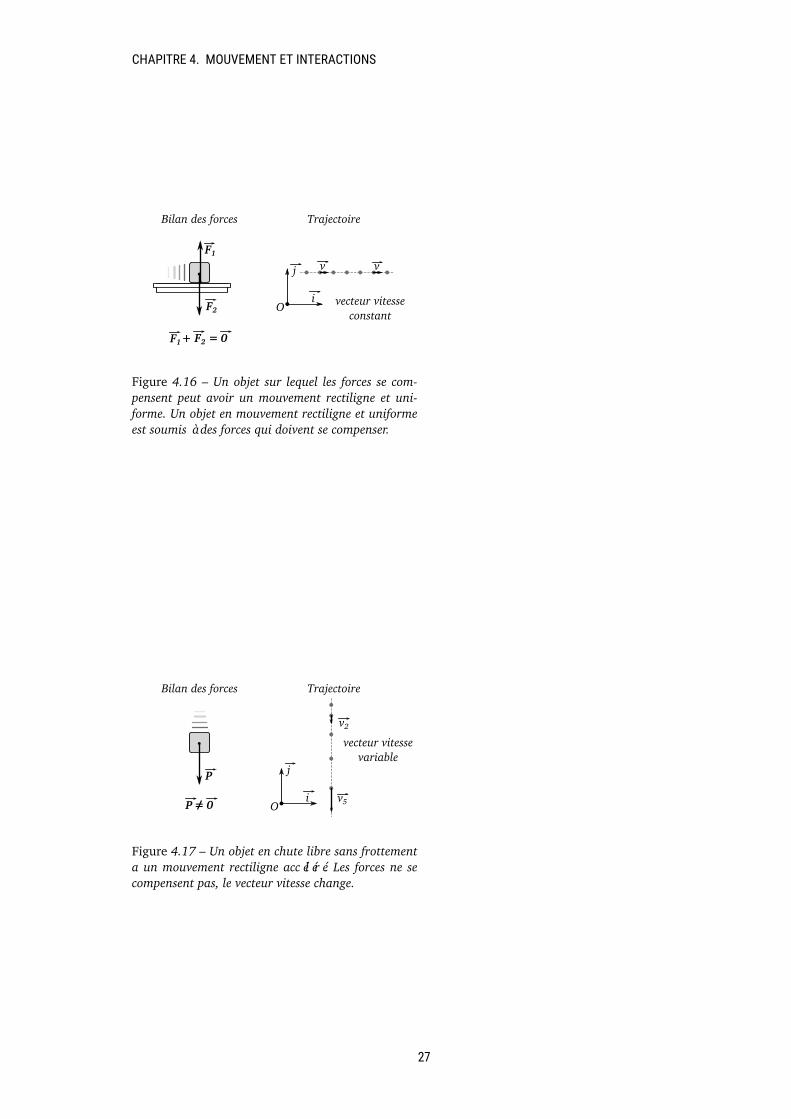
Figure 4.15 – Un objet sur lequel les forces se com-pensent peut rester immobile. Un objet immobile estsoumis à des forces qui doivent se compenser.
4.3.3 Cas du point en mouvement rectiligne uni-forme
Définition Pour un point en mouvement rectiligneuniforme
— la somme des forces extérieures est nulle— le vecteur vitesse reste constante
−→V =
−−−−−−→Constant
Voir figure 4.16.
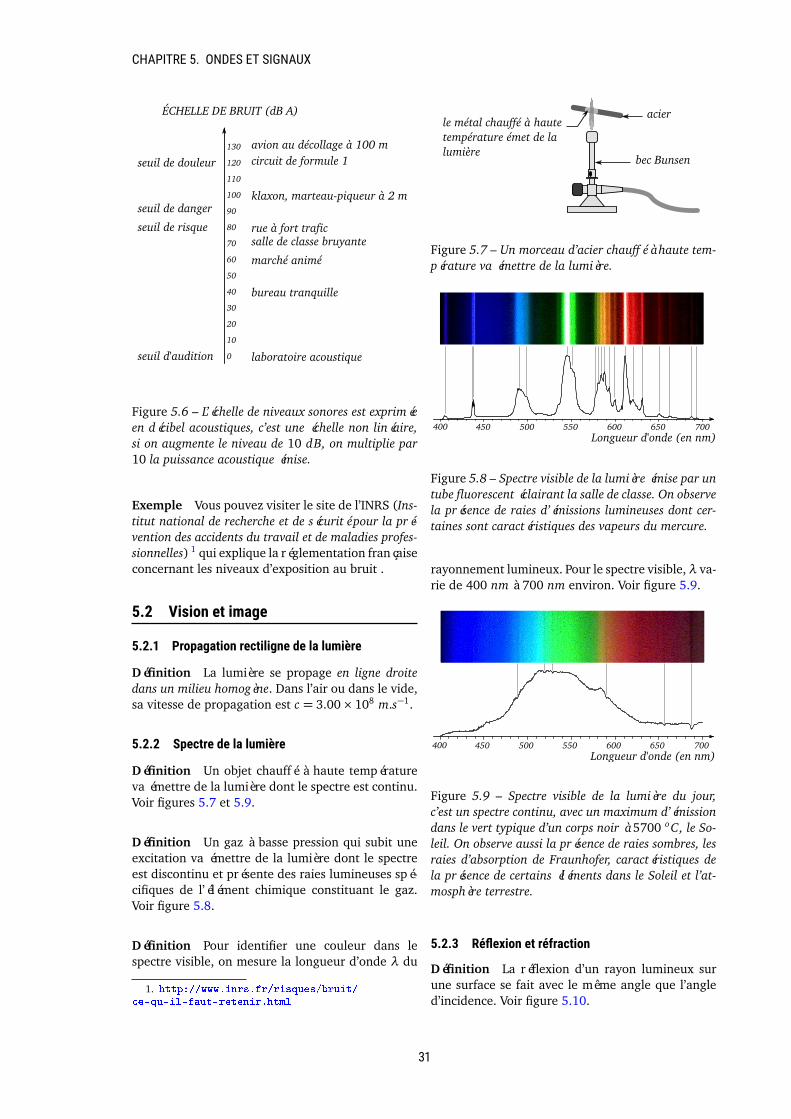
4.3.4 Cas du point en chute libre à une dimension
Définition Pour un point en mouvement de chutelibre à une dimension
— la somme des forces extérieures est non nulle— le vecteur vitesse varie linéairement avec le
temps−→V = (a× t + b)
−→i
Voir figure 4.17.
26
CHAPITRE 4. MOUVEMENT ET INTERACTIONS
Figure 4.16 – Un objet sur lequel les forces se com-pensent peut avoir un mouvement rectiligne et uni-forme. Un objet en mouvement rectiligne et uniformeest soumis à des forces qui doivent se compenser.
Figure 4.17 – Un objet en chute libre sans frottementa un mouvement rectiligne accéléré. Les forces ne secompensent pas, le vecteur vitesse change.
27

PHYSIQUE CHIMIE 2e
28

Chapitre 5
Ondes et signaux
IntroductionPour communiquer l’Être Humain émet etperçois différents types d’ondes qui pour-ront transporter des informations : lesondes sonores et les ondes électromagné-tiques, dont font partie les ondes lumi-neuses. La lumière apporte ainsi des infor-mations sur les objets qui nous entourentet en physique, l’optique et la spectrosco-pie sont les disciplines qui étudient la lu-mière. Les humains utilisent aussi l’électri-cité pour transporter de l’énergie et échan-ger des informations.
5.1 Émission et perception d’un son
5.1.1 Émission et propagation d’un signal sonore
Définition Le son est une perturbation de la pres-sion dans un milieu qui se propage de proche enproche. Pour créer un son, il faut donc créer une sur-pression, en utilisant par exemple un objet qui vibrecomme un diapason ou un fil raide tendu. Voir figure5.1.
Figure 5.1 – Un diapason ou une corde en acier tenduepeuvent produire une onde de pression (son) lors deleur mouvement de vibration.
Définition Pour que la vibration soit bien trans-misse à l’air, on peut utiliser une caisse de résonance.
Exemple Pour bien rendre audible le son émis parun diapason, on le pose sur une surface dure (tableen bois) ou sur une boite creuse. Un instrument àcorde (violon, guitare) utilise une caisse en bois quiamplifie le son par résonance. Voir figure 5.2. Onpeut aussi faire cette démonstration en plaquant untéléphone portable émettant un son contre une boitede conserve en tôle.
Figure 5.2 – Le son du diapason est amplifié grâce àune caisse de résonance. La corde métallique d’un ins-trument de musique est fixée sur une caisse en boispour que le son émis soit plus fort.
Définition Pour que le son puisse se propager, ilfaut la présence d’un milieu matériel (un gaz, un li-quide, un solide). Dans le vide, le son ne peut pas sepropager.
Exemple Si on place un haut parleur sous unecloche à vide, le son n’est plus audible dès que l’airest pompé dans la cloche, car il n’y a plus de ma-tière capable de transmettre les ondes de pression.Voir figure 5.3.
5.1.2 Vitesse de propagation du son
Définition Dans l’air qui nous entour, la vitesse duson est d’environ 343 m.s−1. Cette vitesse varie légè-rement en fonction de la température, de l’humiditéet de la pression atmosphérique.
29

PHYSIQUE CHIMIE 2e
Figure 5.3 – La musique émise par un appareil sous lacloche à vide est perceptible tant que l’air est présentdans la cloche. Dès le pompage mis en route, ce sonest de moins en moins audible car l’air ne le transmetplus.
Exemple La vitesse du son dans l’air 343 m.s−1
correspond à une vitesse de 1200 km.h−1, la vitessede certains avions militaires.
Exemple Pendant un orage, on peut facilement re-marquer un décalage entre le flash de l’éclair dû à lafoudre et l’arrivée du son du tonnerre. La lumièrese propage à 3.00 × 108 m.s−1, sa perception estquasi instantanée, alors que le son va mettre une se-conde pour parcourir 343 mètres. En comptant lessecondes de décalage et en multipliant par 343, ona la distance entre l’éclair et nos oreilles.
5.1.3 Signal sonore périodique
Définition Un signal sonore est périodique quandil se répète identique à lui même au bout d’une du-rée T appelée période, elle s’exprime en seconde (s).Voir figure 5.4
Figure 5.4 – Un signal périodique possède un motif quise répète à une intervalle de temps régulier, appelé lapériode du signal. Cette durée s’exprime en seconde.
Définition La fréquence d’un son f est le nombre defois que le signal se répète à l’identique par seconde,elle s’exprime en Hertz (Hz). Elle est l’inverse de lapériode T
f =1T
Exemple Un son de période T = 1.4 ms corres-pond à un signal sonore de fréquence f = 1
T =1
1.4×10−3 = 714 Hz. Une onde radio de fréquencef = 108 MHz correspond à un signal périodiquede période T = 1
f =1
108×106 = 9.3× 10−9 = 9.3 ns.
5.1.4 perception du son
Définition Le spectre audible par un être humains’étend de 20 Hz à 20 kHz. Les fréquences infé-rieures à 20 Hz correspondent aux infra sons, lesfréquences supérieures à 20 kHz aux ultra sons. Voirfigure 5.5.
Figure 5.5 – Chez l’être humain, le spectre audibles’étend d’environ 20 Hz à 20 kHz. Certains animauxont des spectres auditifs allant des infrasons aux ul-trasons.
Définition En acoustique, la hauteur d’un son cor-respond à sa fréquence f : un son haut a une fré-quence élevée, un son bas a une fréquence faible.
Définition En acoustique, la forme du signal pé-riodique va donner un timbre différent à des sonsayant même hauteur (ou fréquence).
Définition L’onde de pression d’un son transporteune certaine puissance, proportionnelle au carré decette pression. L’intensité du son correspond à lapuissance reçue sur une surface de 1 m2.
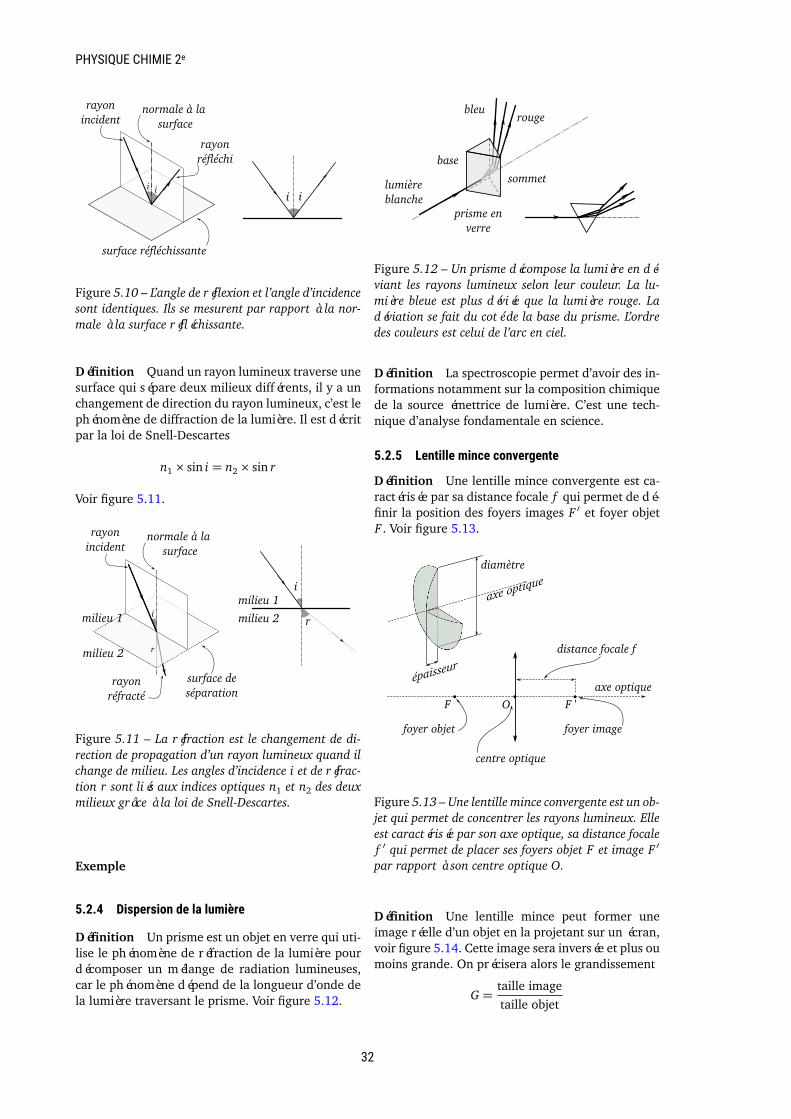
Définition Le niveau d’intensité sonore est uneéchelle non linéaire qui permet de comparer la puis-sance d’un son par rapport à la puissance d’un son àpeine audible. Quand la puissance d’un son est mul-tipliée par 10, le niveau d’intensité sonore augmentede 10 dB SP L (Décibel sound pressure level). Voirfigure 5.6.
Définition Le niveau d’intensité sonore doit êtrecontrôlé dans l’environnement des humains car ilpeut induire à terme des risques de surdité totale oupartielle. C’est également un facteur accidentogèneà cause de la fatigue induite par un environnementbruyant.
30
CHAPITRE 5. ONDES ET SIGNAUX
Figure 5.6 – L’échelle de niveaux sonores est expriméeen décibel acoustiques, c’est une échelle non linéaire,si on augmente le niveau de 10 dB, on multiplie par10 la puissance acoustique émise.
Exemple Vous pouvez visiter le site de l’INRS (Ins-titut national de recherche et de sécurité pour la pré-vention des accidents du travail et de maladies profes-sionnelles) 1 qui explique la réglementation françaiseconcernant les niveaux d’exposition au bruit .
5.2 Vision et image
5.2.1 Propagation rectiligne de la lumière
Définition La lumière se propage en ligne droitedans un milieu homogène. Dans l’air ou dans le vide,sa vitesse de propagation est c = 3.00× 108 m.s−1.
5.2.2 Spectre de la lumière
Définition Un objet chauffé à haute températureva émettre de la lumière dont le spectre est continu.Voir figures 5.7 et 5.9.
Définition Un gaz à basse pression qui subit uneexcitation va émettre de la lumière dont le spectreest discontinu et présente des raies lumineuses spé-cifiques de l’élément chimique constituant le gaz.Voir figure 5.8.
Définition Pour identifier une couleur dans lespectre visible, on mesure la longueur d’onde λ du
1. http://www.inrs.fr/risques/bruit/ce-qu-il-faut-retenir.html
Figure 5.7 – Un morceau d’acier chauffé à haute tem-pérature va émettre de la lumière.
Figure 5.8 – Spectre visible de la lumière émise par untube fluorescent éclairant la salle de classe. On observela présence de raies d’émissions lumineuses dont cer-taines sont caractéristiques des vapeurs du mercure.
rayonnement lumineux. Pour le spectre visible, λ va-rie de 400 nm à 700 nm environ. Voir figure 5.9.
Figure 5.9 – Spectre visible de la lumière du jour,c’est un spectre continu, avec un maximum d’émissiondans le vert typique d’un corps noir à 5700 oC, le So-leil. On observe aussi la présence de raies sombres, lesraies d’absorption de Fraunhofer, caractéristiques dela présence de certains éléments dans le Soleil et l’at-mosphère terrestre.
5.2.3 Réflexion et réfraction
Définition La réflexion d’un rayon lumineux surune surface se fait avec le même angle que l’angled’incidence. Voir figure 5.10.
31
PHYSIQUE CHIMIE 2e
Figure 5.10 – L’angle de réflexion et l’angle d’incidencesont identiques. Ils se mesurent par rapport à la nor-male à la surface réfléchissante.
Définition Quand un rayon lumineux traverse unesurface qui sépare deux milieux différents, il y a unchangement de direction du rayon lumineux, c’est lephénomène de diffraction de la lumière. Il est décritpar la loi de Snell-Descartes
n1 × sin i = n2 × sin r
Voir figure 5.11.
Figure 5.11 – La réfraction est le changement de di-rection de propagation d’un rayon lumineux quand ilchange de milieu. Les angles d’incidence i et de réfrac-tion r sont liés aux indices optiques n1 et n2 des deuxmilieux grâce à la loi de Snell-Descartes.
Exemple
5.2.4 Dispersion de la lumière
Définition Un prisme est un objet en verre qui uti-lise le phénomène de réfraction de la lumière pourdécomposer un mélange de radiation lumineuses,car le phénomène dépend de la longueur d’onde dela lumière traversant le prisme. Voir figure 5.12.
Figure 5.12 – Un prisme décompose la lumière en dé-viant les rayons lumineux selon leur couleur. La lu-mière bleue est plus déviée que la lumière rouge. Ladéviation se fait du coté de la base du prisme. L’ordredes couleurs est celui de l’arc en ciel.
Définition La spectroscopie permet d’avoir des in-formations notamment sur la composition chimiquede la source émettrice de lumière. C’est une tech-nique d’analyse fondamentale en science.
5.2.5 Lentille mince convergente
Définition Une lentille mince convergente est ca-ractérisée par sa distance focale f qui permet de dé-finir la position des foyers images F ′ et foyer objetF . Voir figure 5.13.
Figure 5.13 – Une lentille mince convergente est un ob-jet qui permet de concentrer les rayons lumineux. Elleest caractérisée par son axe optique, sa distance focalef ′ qui permet de placer ses foyers objet F et image F ′
par rapport à son centre optique O.
Définition Une lentille mince peut former uneimage réelle d’un objet en la projetant sur un écran,voir figure 5.14. Cette image sera inversée et plus oumoins grande. On précisera alors le grandissement
G =taille imagetaille objet
32

CHAPITRE 5. ONDES ET SIGNAUX
Figure 5.14 – Le grandissement est le rapport entre lataille de l’image et la taille de l’objet. Le grandissementest négatif si l’image est renversée.
Définition On peut prédire la position de l’imageconnaissant les caractéristiques géométriques de lalentille et la position de l’objet grâce à une construc-tion géométrique. Voir figure 5.15.
5.2.6 Modèle simplifié de l’œil
Définition On modélise le fonctionnement op-tique de l’œil comme étant une lentille de focale va-riable qui projette l’image d’un objet sur la rétine,il est équipé d’un diaphragme(l’iris) qui laisse en-trer plus ou moins de lumière pour éviter l’éblouis-sement. L’œil ne se déforme pas, pour accommoder,c’est le cristallin qui se déforme pour modifier sa fo-cale. Voir figure 5.16.
5.3 Signaux et capteurs
5.3.1 Circuit électrique
Circuit Un circuit électrique contient en général— un ou plusieurs générateurs de courant ou de
tension— des récepteurs (lampe, moteur électrique, ap-
pareil électronique)— ces dispositifs sont obligatoirement reliés par
au moins deux câbles électriques.Voir figure 5.17.
Potentiel électrique La différence de potentielentre deux bornes du générateur va mettre en mou-vement les charges électriques présentes dans le cir-cuit
— de la borne + vers la borne − pour les chargespositives
— de la borne − vers la borne + pour les chargesnégatives
Figure 5.15 – On considère un point B sur un objetdont on veut construire l’image (a). Depuis ce point,on trace un rayon parallèle à l’axe optique qui passeensuite par le foyer image après traversée de la len-tille (b). Puis on trace un rayon passant par le centreoptique O qui n’est pas dévié (c). On trace un rayonpassant par le foyer objet F et qui sort de la lentille pa-rallèle à l’axe optique (d). Ces trois rayons se croisenten un point B′ image de B (e). Tous les rayons quittantle point objet B et traversant la lentille convergerontvers le point image B′, voir la zone grise sur (f).
En traversant un dipôle du circuit, il y a une perte depotentiel, qui est plus faible à la sortie du dipôle. Onsymbolise la différence de potentiel UAB = VA − Vbà l’aide d’une flèche dessinée à coté du dipôle. Voirfigure 5.18.
33

PHYSIQUE CHIMIE 2e
Figure 5.16 – L’œil simplifié est composé d’un iris quilaisse plus ou moins la lumière entrer dans l’œil, puisd’un cristallin qui est une lentille déformable, elle aune focale variable qui permet l’accommodation, etd’une rétine couverte de cellules nerveuses sensibles àla lumière (cônes et bâtonnets) sur laquelle se projettel’image des objets observés.
Figure 5.17 – Ce circuit électrique se compose d’unesource de tension (1), qui alimente un moteur (4)quand on ferme l’interrupteur (2) . Quand le moteurest sous tension, une diode luminescente s’allume (5)et le courant dans cette diode est limité par une résis-tance électrique (3).
Figure 5.18 – Aux bornes A et B d’un dipôle, les po-tentiels VA et VB peuvent être différents et il y a unedifférence de potentiel UAB = VA− VB schématisée parune flèche à coté du dipôle. Le courant électrique I cir-cule de la borne + du générateur vers la borne −. Ilreprésente le déplacement des charges électriques posi-tives.
Courant électrique Le courant électrique est ledéplacement des charges électriques positives etnégatives dans le circuit. Par convention, on in-dique seulement le déplacement des charges posi-tives dans le circuit à l’aide d’une flèche dessinée surune branche du circuit. Voir figure 5.18.
5.3.2 Mesures électriques
Intensité du courant L’intensité du courant se me-sure en Ampère (A) à l’aide d’un ampèremètre quidoit être traversé par le courant. Les contrôleurs uni-versels possèdent ainsi deux bornes, l’une pour l’en-trée du courant (rouge, avec le symbole A) et unepour la sortie du courant (noire) avec le symboleCOM. Pour placer un ampèremètre dans un circuit,il faut ouvrir le circuit pour brancher cet appareil,cela doit se faire avec l’alimentation électrique cou-pée. Voir figure 5.19.
Différence de potentiel La différence de potentielse mesure en Volt (V ) à l’aide d’un voltmètre munide deux câbles, l’un relié à une borne de référence(COM), l’autre relié à la borne V (rouge). On mesurela différence de potentiel entre ces deux bornes. Voirfigure 5.19.
Figure 5.19 – Un contrôleur universel mesure l’inten-sité I du courant électrique, un autre contrôleur uni-versel mesure la différence de potentiel UAB au borned’un dipôle.
5.3.3 Loi des nœuds
Définition Dans un circuit électrique, le courantdoit se conserver, tous les courants qui entrent dansun nœud doivent être égaux à tous les courants quiquittent ce nœud.
Exemples Dans le circuit de la figure 5.20, d’aprèsla loi des nœuds, on pourra écrire
— au nœud A, on a I1 = I2 + I3— au nœud C ,on a 0= I5 + I6 + I7— au nœud B,on a I2 = I4
34

CHAPITRE 5. ONDES ET SIGNAUX
— dans la branche ABC ,on a I6 = −I4— dans la branche du générateur,on a I1 = I7
Figure 5.20 – La loi des nœuds signifie que le courantdoit se conserver dans un circuit électrique.
5.3.4 Loi des mailles
Définition Dans une maille (ou boucle) d’un cir-cuit électrique, après avoir défini arbitrairement unsens de parcours de la boucle, la somme des diffé-rences de potentiel est nulle. On comptera positive-ment une différence de potentielle dont la flèche estdans le sens du parcours, négativement dans le cascontraire.
Exemples Dans le circuit de la figure 5.21, en choi-sissant de tourner dans les boucles dans le sens desaiguilles d’une montre, d’après la loi des mailles, onpourra écrire
— UAD + UCA− UC D = 0 V— UAD − UAC − UBC − UC D = 0 V— −UAC − UBC − UCA = 0 V
Figure 5.21 – La loi des mailles signifie que la sommedes différences de potentiels dans une maille est nulle.
5.3.5 Caractéristique tension U et courant I d’un di-pôle
Définition La caractéristique courant-tension d’undipôle est un graphique expérimental qui représentela relation entre l’intensité du courant traversant
le dipôle et la tension au borne de ce dipôle. Voirschéma 5.22.
Figure 5.22 – Caractéristique courant-tension d’unediode. C’est un dipôle qui ne laisse circuler le courantque dans un seul sens. Il peut émettre de la lumière(LED) ou la détecter (photodiode).
Définition Si on dispose de la caractéristiquecourant-tension d’un dipôle, on peut trouver sonpoint de fonctionnement, c’est à dire la valeur deI qui le traversera pour une tension U à ses bornes.
Définition La caractéristique d’un dipôle ohmiqueest
UAB = R× I
avec— UAB en volt (V )— I en ampère (A), orienté de A vers B— R en Ohms Ω
Figure 5.23 – Caractéristique courant-tension d’unerésistance, la tension UAB est proportionnelle au cou-rant I par le facteur R. On ne peut pas cependant avoirn’importe quelle valeur pour les tensions et les cou-rants, la résistance chauffe et peut être détruite.
35
PHYSIQUE CHIMIE 2e
5.3.6 Capteurs électriques
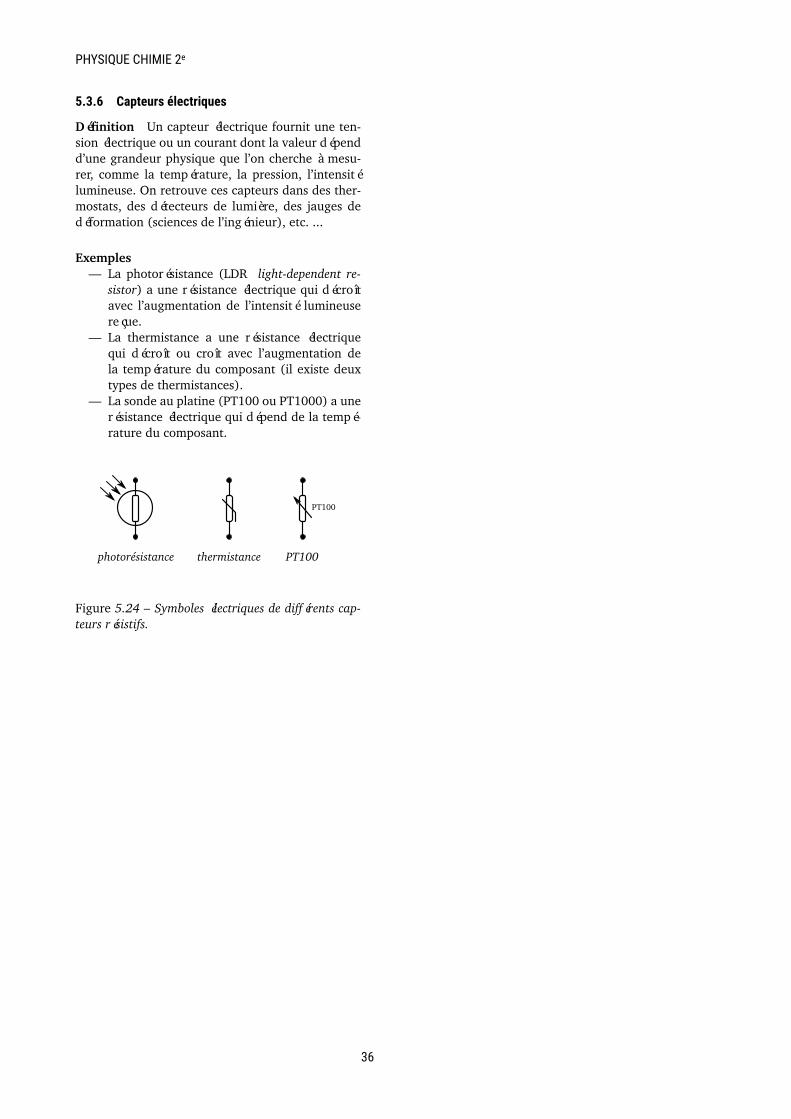
Définition Un capteur électrique fournit une ten-sion électrique ou un courant dont la valeur dépendd’une grandeur physique que l’on cherche à mesu-rer, comme la température, la pression, l’intensitélumineuse. On retrouve ces capteurs dans des ther-mostats, des détecteurs de lumière, des jauges dedéformation (sciences de l’ingénieur), etc. ...
Exemples— La photorésistance (LDR light-dependent re-
sistor) a une résistance électrique qui décroîtavec l’augmentation de l’intensité lumineusereçue.
— La thermistance a une résistance électriquequi décroît ou croît avec l’augmentation dela température du composant (il existe deuxtypes de thermistances).
— La sonde au platine (PT100 ou PT1000) a unerésistance électrique qui dépend de la tempé-rature du composant.
Figure 5.24 – Symboles électriques de différents cap-teurs résistifs.
36
Chapitre 6
Annexes
6.1 Table de la classification périodique deséléments
Classification périodique La table de la classifica-tion périodique des éléments est donnée sur la table6.1.
Traduction du nom des éléments Les élémentsdes trois premières lignes se traduisent ainsi :
Français AnglaisHydrogène HydrogenHélium HeliumLithium LithiumBéryllium BerylliumBore BoronCarbone CarbonAzote NitrogenOxygène OxygenFluor FluorineNéon NeonSodium SodiumMagnésium MagnesiumAluminium AluminumSilicium SiliconPhosphore PhosphorusSouffre SulfurChlore ChlorineArgon Argon
Fer IronCuivre CopperBrome BromineArgent SilverÉtain TinPlatine PlatinumOr GoldMercure MercuryPlomb Lead
Table 6.1 – Traduction français anglais du nom dequelques éléments
37

PHYSIQUE CHIMIE 2e
1 Hhy
drog
en1.
008
[1.0
078,
1.0
082]
1 18
3 Li
lithi
um6.
94
[6.9
38, 6
.997
]
4 Be
bery
llium
9.01
22
11 Na
sodi
um
22.9
90
12 Mg
mag
nesi
um24
.305
[24.
304,
24.
307]
19 Kpo
tass
ium
39.0
98
20 Ca
calc
ium
40.0
78(4
)
37 Rb
rubi
dium
85.4
68
38 Sr
stro
ntiu
m
87.6
2
38 Sr
stro
ntiu
m
87.6
2
55 Cs
caes
ium
132.
91
55 Cs
caes
ium
132.
91
56 Ba
bariu
m
137.
33
87 Fr
fran
cium
88 Ra
radi
um
5 B boro
n10
.81
[10.
806,
10.
821]
13 Al
alum
iniu
m
26.9
82
31 Ga
galli
um
69.7
23
49 Inin
dium
114.
82
81 Tl
thal
lium
204.
38
[204
.38,
204
.39]
6 Cca
rbon
12.0
11
[12.
009,
12.
012]
14 Si
silic
on28
.085
[28.
084,
28.
086]
32 Ge
germ
aniu
m
72.6
30(8
)
50 Sn
tin
118.
71
82 Pb
lead
207.
2
7 Nni
trog
en14
.007
[14.
006,
14.
008]
15 Pph
osph
orus
30.9
74
33 As
arse
nic
74.9
22
51 Sb
antim
ony
121.
76
83 Bi
bism
uth
208.
98
8 Oox
ygen
15.9
99
[15.
999,
16.
000]
16 S sulfu
r32
.06
[32.
059,
32.
076]
34 Se
sele
nium
78.9
71(8
)
52 Tete
lluriu
m
127.
60(3
)
84 Po
polo
nium
9 Fflu
orin
e
18.9
98
17 Cl
chlo
rine
35.4
5
[35.
446,
35.
457]
35 Br
brom
ine
79.9
04
[79.
901,
79.
907]
53 Iio
dine
126.
90
85 At
asta
tine
10 Ne
neon
20.1
802 He
heliu
m
4.00
26
18 Ar
argo
n39
.95
[39.
792,
39.
963]
36 Kr
kryp
ton
83.7
98(2
)
54 Xe
xeno
n
131.
29
86 Rn
rado
n
22 Ti
titan
ium
47.8
67
22 Ti
titan
ium
47.8
67
40 Zr
zirc
oniu
m
91.2
24(2
)
72 Hf
hafn
ium
178.
49(2
)
104
Rf
ruth
erfo
rdiu
m
23 Vva
nadi
um
50.9
42
41 Nb
niob
ium
92.9
06
73 Tata
ntal
um
180.
95
105
Db
dubn
ium
24 Cr
chro
miu
m
51.9
96
24 Cr
chro
miu
m
51.9
96
42 Mo
mol
ybde
num
95.9
5
74 Wtu
ngst
en
183.
84
106
Sg
seab
orgi
um
25 Mn
man
gane
se
54.9
38
43 Tcte
chne
tium
75 Re
rhen
ium
186.
21
107
Bh
bohr
ium
26 Fe
iron
55.8
45(2
)
44 Ru
ruth
eniu
m
101.
07(2
)
76 Os
osm
ium
190.
23(3
)
108
Hs
hass
ium
27 Co
coba
lt
58.9
33
45 Rh
rhod
ium
102.
91
77 Iriri
dium
192.
22
109
Mt
mei
tner
ium
28 Ni
nick
el
58.6
93
46 Pd
palla
dium
106.
42
78 Pt
plat
inum
195.
08
110
Ds
darm
stad
tium
29 Cu
copp
er
63.5
46(3
)
47 Ag
silv
er
107.
87
79 Au
gold
196.
97
30 Zn
zinc
65.3
8(2)
48 Cd
cadm
ium
112.
41
80 Hg
mer
cury
200.
59
111
Rg
roen
tgen
ium
112
Cn
cope
rnic
ium
114
Fl
flero
vium
113
Nh
niho
nium
115
Mc
mos
covi
um
117
Tste
nnes
sine
118
Og
ogan
esso
n
116
Lv
liver
mor
ium
57 La
lant
hanu
m
138.
91
58 Ce
ceriu
m
140.
12
59 Pr
pras
eody
miu
m
140.
91
60 Nd
neod
ymiu
m
144.
24
61 Pm
prom
ethi
um
62 Sm
sam
ariu
m
150.
36(2
)
63 Eu
euro
pium
151.
96
64 Gd
gado
liniu
m
157.
25(3
)
65 Tb
terb
ium
158.
93
66 Dy
dysp
rosi
um
162.
50
67 Ho
holm
ium
164.
93
68 Er
erbi
um
167.
26
69 Tm
thul
ium
168.
93
70 Yb
ytte
rbiu
m
173.
05
71 Lu
lute
tium
174.
97
89 Ac
actin
ium
90 Th
thor
ium
232.
04
91 Pa
prot
actin
ium
231.
04
92 Uur
aniu
m
238.
03
93 Np
nept
uniu
m
94 Pu
plut
oniu
m
95 Am
amer
iciu
m
96 Cm
curiu
m
97 Bk
berk
eliu
m
98 Cf
calif
orni
um
99 Es
eins
tein
ium
100
Fm
ferm
ium
101
Md
men
dele
vium
102
No
nobe
lium
103
Lr
law
renc
ium
21 Sc
scan
dium
44.9
56
39 Yyt
triu
m
88.9
06
57-7
1
lant
hano
ids
89-1
03
actin
oids
atom
ic n
umbe
r
Symbol
name
conv
entio
nal a
tom
ic w
eigh
t
stan
dard
ato
mic
wei
ght
2 13
14
15
16
17
K
ey:
3 4
5 6
7 8
9 10
11
12
IUPA
C P
eri
odic
Table
of
the E
lem
ents
For
note
s and
up
date
s to
this
tab
le,
see w
ww
.iup
ac.
org
.
This
vers
ion is
date
d 1
Dece
mb
er
20
18
. C
op
yri
ght
© 2
01
8 IU
PAC
the In
tern
ati
onal U
nio
n o
f Pure
an
d
Ap
plie
d C
hem
istr
y.
Figure 6.1 – Table de la classification périodique des éléments
38