
pentes I:Méthodes rupture - Géotechnique Francophone · quantifier la stabilité d'un talus. on...
14
IJévolution des méthodes de calcul en stabilité de pentes Partie I:Méthodes à la rupture Cet article présente l'évolution des méthodes de calcul en stabilité de pentes, utiles à l'ingénieur cherchant à quantifier la stabilité d'un talus. on s'intéresse tout particulièrement aux hypothèses des méthodes de calcul, pour que l'usage de ces méthodes corresponde bien au but pour lequel elles ont été développées. Pour les méthodes de calcul à la rupture, onpart du coin de coulomb, et on montre la complexification progressive des méthodes et l'abondance provoquée par I'arrivée des calculateurs. Toutes ces méthodes ne conduisent pas pour autant à des résultats indiscutables. Le savoir-faire de l'utilisateur reste encore le garant du bon emploi de ces méthodes. Mots-clés: stabilité des pentes, méthodes de calcul, méthode à la rupture, coefficient de sécurité, classification, équilibre, déplacement, fluage. Centre d'Étude des Tunnels 25, avenue,François- : "Mittercand 69500 Bron, France NP,[E.|,:,,I,êS,,.,dtsC,U.S$tôflb sur . :' ll':, , . Cê.f .... ffi bJë. ., b''b' ni,'t" 1,e' ebp # è, i .,'... .,,'..,.,,jt ffi.'â, ...,,f,*'i'*ili;lêtt,=&001 . l'ql IE l= lur l.0l lÉ IP l(, t(o lI- I f-r | 0t, l-o t< 3 REVUE FRANçAIsE or cÉotecuNteuE N" g2 3e trimestre 2000 The evolution of slope stability methods Part I: Failure methods This paper shows the evolution of the slope stability methods, useful for engineers in charge of quantifying a slope stability. We point out the hypothesis of the methods in relation with their relevant use. Dealing with failure methods, we start from Coulomb's corner, and show the progressive compiexification and the multiplication of the methods, due to the upcoming of computers. However, no method can be considered as being the best, the user's know-how remaining the guarantee of their use. Key words: slope stability, computationnal method, failure method, safety factor, classification, equilibrium, displacement, creep.
Transcript of pentes I:Méthodes rupture - Géotechnique Francophone · quantifier la stabilité d'un talus. on...
IJévolution des méthodesde calcul en stabilitéde pentesPartie I:Méthodesà la rupture
Cet article présente l'évolution des méthodes de calcul enstabilité de pentes, utiles à l'ingénieur cherchant àquantifier la stabilité d'un talus. on s'intéresse toutparticulièrement aux hypothèses des méthodes de calcul,pour que l'usage de ces méthodes corresponde bien aubut pour lequel elles ont été développées. Pour lesméthodes de calcul à la rupture, onpart du coin decoulomb, et on montre la complexification progressivedes méthodes et l'abondance provoquée par I'arrivée descalculateurs. Toutes ces méthodes ne conduisent paspour autant à des résultats indiscutables. Le savoir-fairede l'utilisateur reste encore le garant du bon emploi deces méthodes.
Mots-clés: stabilité des pentes, méthodes de calcul,méthode à la rupture, coefficient de sécurité,classification, équilibre, déplacement, fluage.
Centre d'Étude des Tunnels25, avenue,François-: "Mittercand
69500 Bron, France
NP,[E.|,:,,I,êS,,.,dtsC,U.S$tôflb sur.
:' ll':, ,
. Cê.f .... ffi bJë.
., b''b' ni,'t" 1,e'
ebp # è, i.,'... .,,'..,.,,jt ffi.'â, ...,,f,*'i'*ili;lêtt,=&001 .
l'qlIEl=lurl.0llÉ
IPl(,t(olI-I f-r| 0t,l-ot<
3REVUE FRANçAIsE or cÉotecuNteuE
N" g2
3e trimestre 2000
The evolutionof slope stability methodsPart I: Failure methods
This paper shows the evolution of the slope stability methods,useful for engineers in charge of quantifying a slope stability.We point out the hypothesis of the methods in relation withtheir relevant use. Dealing with failure methods, we start fromCoulomb's corner, and show the progressive compiexificationand the multiplication of the methods, due to the upcoming ofcomputers. However, no method can be considered as being thebest, the user's know-how remaining the guarantee of their use.
Key words: slope stability, computationnal method, failuremethod, safety factor, classification, equilibrium, displacement,creep.
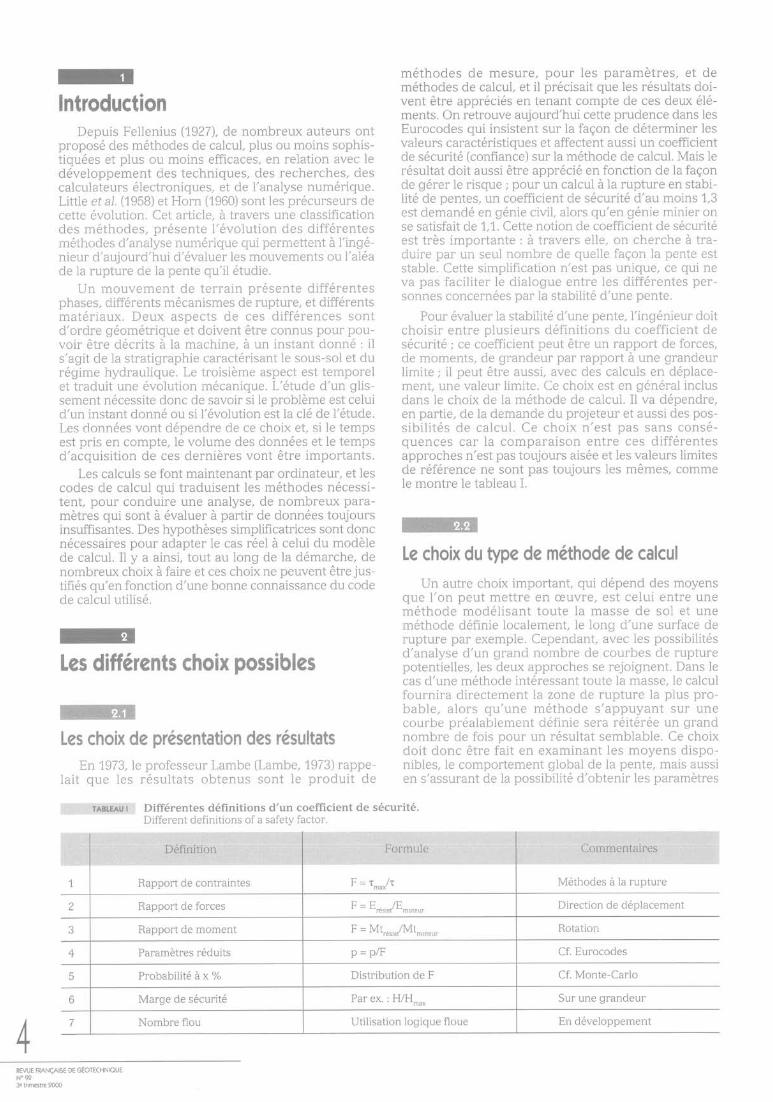
1, Rapport de contraintes F=T /rmaxMéthodes à la rupture
2 Rapport de forces tr-tr lF^ - "résist'"moteu Direction de déplacement
3 Rapport de moment F = Mtrésist/Mtmoteur Rotation
4 Paramètres réduits P=PÆ Cf. Eurocodes
5 Probabilité à x % Distribution de F Cf. Monte-Carlo
6 Marge de sécurité Par ex. : H/H_u* Sur une grandeur
7 Nombre flou Utilisation logique floue En développement
IntroductionE
Depuis Fellenius (1,927), de nombreux auteurs ontproposé des méthodes de calcul, plus ou moins sophis-tiquées et plus ou moins efficaces, en relation avec ledéveloppement des techniques, des recherches, descalculateurs électroniques , et de l'analyse numérique.Little et aL (1958) et Horn (1960) sont les précurseurs decette évolution. Cet article, à travers une classificationdes méthodes, présente l'évolution des différentesméthodes d'analyse numérique qui permettent à l'ingé-nieur d'aujourd'hui d'évaluer les mouvements ou l'aléade la rupture de la pente qu'il étudie.
lJn mouvement de terrain présente différentesphases, différents mécanismes de rupture, et différentsmatériaux. Deux aspects de ces différences sontd'ordre géométrique et doivent être connus pour pou-voir être décrits à Ia machine, à un instant donné : ils'agit de la stratigraphie caractérisant le sous-sol et durégime hydraulique. Le troisième aspect est temporelet traduit une évolution mécanique. L'étude d'un glis-sement nécessite donc de savoir si le problème est celuid'un instant donné ou si l'évolution est la clé de l'étude.Les données vont dépendre de ce choix et, si le tempsest pris en compte, le volume des données et le tempsd'acquisition de ces dernières vont être importants.
Les calculs se font maintenant par ordinateur, et lescodes de calcul qui traduisent les méthodes nécessi-tent, pour conduire une analyse, de nombreux para-mètres qui sont à évaluer à partir de données toujoursinsuffis ante s . D e s hypothè se s simplificatrice s s ont doncnécessaires pour adapter le cas réel à celui du modèlede calcul. 11 y a ainsi, tout au long de Ia démarche, denombreux choix à faire et ces choix ne peuvent être jus-tifiés qu'en fonction d'une bonne connaissance du codede calcul utilisé.
-
Les difîérents choix possibles
ffiLes choix de présentation des résultats
En 1,973, le professeur Lambe (Lambe, 1973) rappe-lait que les résultats obtenus sont le produit de
rii;ffit$É;i;fn'fffi |:iDifférentesdéfi nitionsd'uncoeffi cientdesécurité.Different definitions of a safetv factor.
méthodes de mesure, pour les paramètres, et deméthodes de calcul,, et il précisait que les résultats doi-vent être appréciés en tenant compte de ces deux éIé-ments. On retrouve aujourd'hui cette prudence dans lesEurocodes qui insistent sur la façon de déterminer lesvaleurs caractéristiques et affectent aussi un coefficientde sécurité (confiance) sur la méthode de calcul. Mais lerésultat doit aussi être apprécié en fonction de la façonde gérer Ie risque ; pour un calcul à la rupture en stabi-lité de pentes, un coefficient de sécurité d'au moins L,3est demandé en génie civil, alors qu'en génie minier onse satisfait de L,1. Cette notion de coefficient de sécuritéest très importante : à travers elle, on cherche à tra-duire par un seul nombre de quelle façon la pente eststable. Cette simplification n'est pas unique, ce qui neva pas faciliter Ie dialogue entre les différentes per-sonnes concernées par la stabilité d'une pente.
Pour évaluer la stabilité d'une pente, l'ingénieur doitchoisir entre plusieurs définitions du coefficient desécurité ; ce coefficient peut être un rapport de forces,de moments, de grandeur par rapport à une grandeurlimite ; il peut être aussi, avec des calculs en déplace-ment, une valeur limite. Ce choix est en général inclusdans le choix de la méthode de calcul. Il va dépendre,en partie, de Ia demande du projeteur et aussi des pos-sibilités de calcul. Ce choix n'est pas sans consé-quences car la comparaison entre ces différentesapproches n'est pas toujours aisée et les valeurs limitesde référence ne sont pas toujours les mêrnes, commele montre le tableau I.
ffiLe choix du type de méthode de calcul
lJn autre choix important, qui dépend des moyensque l'on peut mettre en æuvre, est celui entre uneméthode modélisant toute la masse de sol et uneméthode définie localement, le long d'une surface derupture par exemple. Cependant, avec les possibilitésd'analyse d'un grand nombre de courbes de rupturepotentielles, les deux approches se rejoignent. Dans lecas d'une méthode intéressant toute la masse, le calculfournira directement la zone de rupture la plus pro-bable, alors qu'une méthode s'appuyant sur unecourbe préalablement définie sera réitérée un grandnombre de fois pour un résultat semblable. Ce choixdoit donc être fait en examinant les moyens dispo-nibles, le comportement global de la pente, mais aussien s'assurant de la possibilité d'obtenir les paramètres
{IIJ{î
1
'ta
1
4REVUE FRANçAISE DE GÊOTECHNIQUEN'923e trimestre 2000

de calcul correspondants au modèle. Le comportementgtobal de la pente correspond à quatre mécanismes quise traduisent par des déplacements du sol différem-ment répartis. (Vaunat et aL,1992) :
- pré-rupture, où le comportement du sol est élasto-visco-plastique et où le massif est un milieu continu,sans zoï1e de discontinurté ; les déformations sont quasihomogènes ;
- rupture, où une partie du massif se déplace par rap-port à l'autre ; Ie modèle de sol est élasto-plastique,voire rigide-plastieue ;
- post-rupture, où une partie du sol se déplace surl'autre, comme un écoulement visqueux et avec unevitesse appréciable ;
- réactivation,, quand la partie du sol ayant déjà glissé ets'étant stabilisée, le mouvement reprend sur une sur-face prédéfinie, suivant un comportement rigide-plas-tique.
La distinction entre ces quatre mécanismes est fon-damentale pour une étude fiable des pentes , et ceci vabien srfr influer sur }e choix d'une méthode de calcul.Elle permet de choisir entre les types de méthodes rap-pelés ci-après.
,";#,',' r:-l,itÏ:tffi
Méthodes de calcul à la rupture
Lorsqu'une masse rigide peut se déplacer le longd'une surface de géométrie bien définie, le comporte-ment est contrôlé par la loi de Mohr-Coulomb, quidonne la résistance au cisaillement à la rupture t,. Enconditions non drainées, cette résistance est la résis-tance au cisaillement non drainée rru. Quand on connaîtIes pressions interstitielles, la résistance au cisaillementpeut s'exprimer en contraintes effectives, selon Ia rela-tion x, = c' + o' tan (p'. C'est le cas des massifs rocheuxfracturés, pour lesquels Ia cinématique du mouvementest conditionnée par les discontinuités et leur orienta-tion spatiale ; c'est aussi le cas pour les sols lorsqu'ilpeut y avoir mouvement le long d'une surface de glis-Sement préexistante. Dans le cas des réactivations, C'eSt
l'angle de frottement résiduel qu'il faut prendre encompte. Pour tous ces cas, les méthodes dites à l'équi-libre limite sont très appropriées car on peut écrire faci-lement les équations qui relient les variables ; mais,sauf pour les cas les plus simples, le nombre devariables est bien supérieur au nombre d'équations.
'ii,,,g#it"triif*T{,ti i Méthodes de calcul à utiliser.Choice of a calculus method.
Pour pouvoir résoudre les équations, il faut alors intro-duire des hypothèses supplémentaires et simplifica-trices de manière à égaliser Ie nombre d'inconnues et lenombre d'équations.
Dans les sols relativement homogènes ne présen-tant pas de discontinuités géologiques, la surface surlaquelle il pourrait y avoir rupture n'est pas connue.Elle est alors définie sur la base d'un coefficient desécurité minimal et d'une rupture cinématiquementpossible. Notons que dans de tels cas, le processusconduisant à la rupture est complexe et rend la sélec-tion des paramètres de résistance difficile. Afin de pré-ciser la surface de rupture la plus critique et le coeffi-cient de sécurité qui lui est associé, on utilisegénéralement des méthodes à l'équilibre limite itéréesde nombreuses fois.
Les méthodes à l'équilibre limite ont été adaptéespour répondre aux besoins de Ia profession et prendreen compte, en particulier, la troisième dimension, desefforts d5rnamiques qui peuvent être importants en casde séismes, et des inclusions dans le cas de conforta-tions.
Toutes ces méthodes à l'équilibre limite sont de ffiebloc rigide sur substratum rigide, sans considérationspour les mouvements internes aux blocs. Dans le casde glissements actifs, la surface de rupture est connue,le coefficient de sécurité est de 1.0 et l'on peut parlerd'analyse à rebours. Mais si le paramètre important estla vitesse de mouvement qui peut être plus ou moinsélevée, il devient nécessaire d'adjoindre un modèle vis-queux aux méthodes à l'équilibre limite.
i+ïf#È#Htr{+ïrffi
Méthodes volumiques ou méthodes sans hypoth èsesur la surface de rupture (de type élëments finis)
Avant Ia rupture, au stade de Ia pré-rupture, le mas-sif de sol ou de roche est continu et son comportementne peut être analysé par des méthodes à l'équilibrelimite, car on ne peut mettre en évidence une surfacede rupture. Les phénomènes à décrire sont nombreuxet complexes (élasto-plasti cité, fluage, rupture progres-sive) et intéressent l'ensemble du massif. II est alorsnécessaire de considérer des méthodes volumiquesprenant en compte l'ensemble du volume pour analy-ser les mouvements ainsi que leur évolution dans Ietemps.
5REVUE FRANçAIsE oE e ÉorEcHNteuE
N'993e trimestre 2000
Chute ou écroulementA-tb,lements lrnrssi massif continuÉléments volumiquessi massif faillé
Sans objet Méthodes énergétiques Sans objet
GlissementAtz . n'|,lements rlnlscar ligne de ruptureinconnue
Calcul à Ia rupturesur ligne de rupturesupposée
Méthodes énergétiques Calcul à la rupturesur ligne de ruptureconnue
Fluage Éléments finis Sans objet Sans objet Éléments finis
Coulée Éléments finis Éléments finis Eléments finis Sans objet
.rr.
Méthodes,ënergëti q ues
L'amplitude et la vitesse des mouvements dépen-dent essentiellement de la redistribution de l'énergiepotentielle devenant disponible au moment de la rup-ture. Pour les grandes vitesses et les grands déplace-ments, il faut alors considérer des approches énergé-tiques. Dans le cas où, au sein de la masse enmouvement, Ia pression interstitielle joue un grandrôle, on utilisera des approches initialement dévelop-pées pour des problèmes de fluides avec des viscositésévolutives ou des approches basées sur l'observation.
Le tableau II relie les types de mouvements, le typede rupture et les méthodes à utiliser.
Cet article ne traite que des méthodes à la rupture,les méthodes volumiques et énergétiques seront pré-sentées dans un prochain article.
Calculs à la ruptule
ffiMéthodes des blocs
;r|r,.
Principes du calcul à la rupture
Les méthodes de calcul à la rupture sont desméthodes où l'analyse et le calcul sont locaux, limitéssur une ligne ou une surface de rupture, réelle oupotentielle, et s'opposent donc aux méthodes volu-miques. Du fait de cette restriction, les hypothèses sonttrès fortes, mais les paramètres sont moins nombreuxet plus faciles à déterminer. Ce sont les méthodes lesplus anciennes (on peut y rattacher la méthode du coinde Coulomb, vers 1780) et elles sont basées sur leshypothèses suivantes : le massif en mouvement peutêtre décomposé en un ensemble de blocs rigides inoé-formables qui frottent les uns sur les autres. Le com-portement de l'interface est presque toujours défini parla loi de Coulomb. Ceci est approprié pour les massifsrocheux et les argiles discontinues, quand on peut pré-voir correctement la forme de rupture des blocs enfonction des matériaux; mais cela est aussi l'hypothèseforte des calculs à l'équilibre limite, qui distinguent unepartie potentiellement mobile, séparée d'une partie fixedu massif, par une courbe de rupture définissant unerupture cinématiquement admissible. Dans ce cas :
- le calcul d'équilibre est fait à la rupture ;
- les équations résolvantes sont les équations de la sta-tique ;
- Ie coefficient de sécurité F est spatialement bien déter-miné (on peut considérer par exemple F constant partout).
",.t
Cas statiqu ement définis. Rupture plane d'un talus
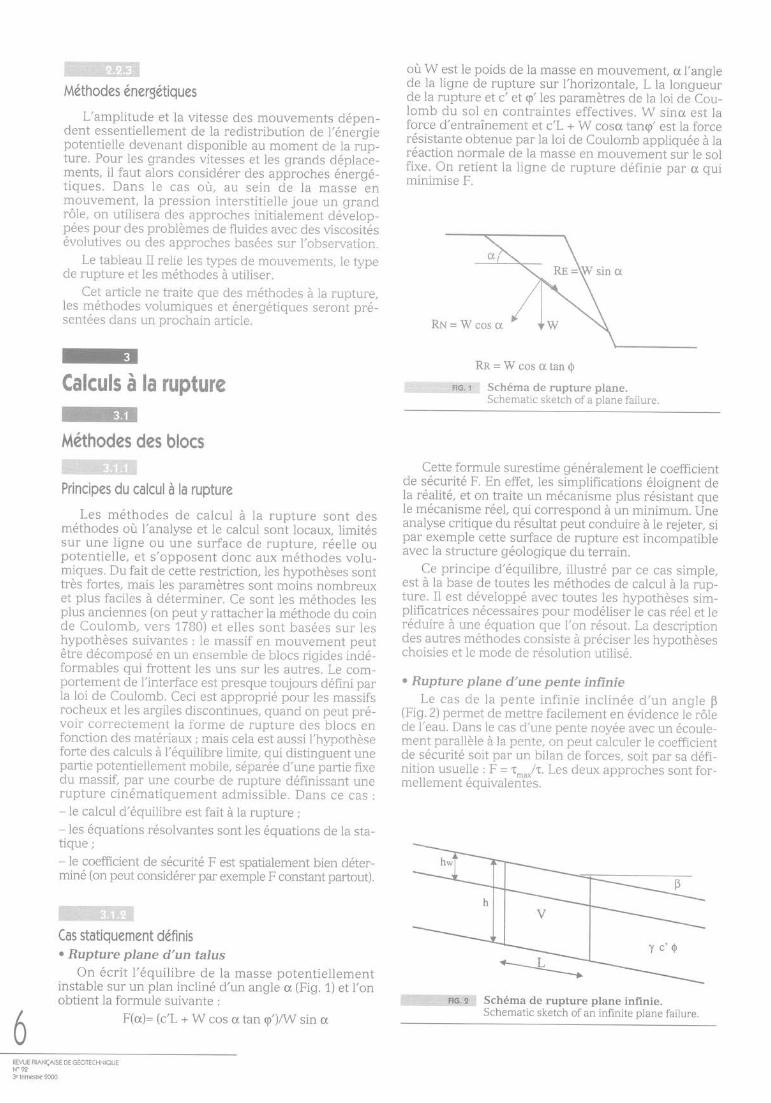
on écrit l'équilibre de la masse potentiellementinstable sur un plan incliné d'un angle o( (Fig. 1) et l'onobtient la formule suivante :
où w est le poids de Ia masse en mouvernent, o l'anglede la ligne de rupture sur l'horizontale , L la longueurde la rupture et c' et <p'les paramètres de la loi de Cou-lomb du sol en contraintes effectives. W sincx est laforce d'entraînement et c'L + W coso( tanq' est la forcerésistante obtenue par la loi de Coulomb appliquée à laréaction normale de la masse en mouvement sur le solfixe. On retient la ligne de rupture définie par cx quiminimise F.
RR = V/ cos cr tan Q
tlliïffiflinlrf,t,#iïfty; i Schéma de rupture plane.Schematic sketch of a plane failure.
Cette formule surestime généralement le coefficientde sécurité F. En effet, les simplifications éloignent dela réalité, et on traite un mécanisme plus résistant quele mécanisme réel, qui coruespond à un minimum. uneanalyse critique du résultat peut conduire à le rejeter, sipar exemple cette surface de rupture est incompatibleavec la structure géologique du terrain.
Ce principe d'équilibre, illustré par ce cas simple,est à Ia base de toutes les méthodes de calcul à la rup-ture. Il est développé avec toutes les hypothèses sim-plificatrices nécessaires pour modéliser le cas réel et leréduire à une équation que l'on résout . La descriptiondes autres méthodes consiste à préciser les hypothèseschoisies et le mode de résolution utilisé.
o Rupture plane d'une pente infrnieLe cas de la pente infinie inclinée d'un angle B
(Fig.2) permet de mettre facilement en évidence le rôlede I'eau. Dans le cas d'une pente noyée avec un écoule-ment parallèle à la pente, on peut calculer le coefficientde sécurité soit par un bilan de forces, soit par sa défi-nition usuelle : F = t^^,/r. Les deux approches sont for-mellement é quivareri'fô s
fii,#.î*{.,ffi*iffiffifjfi,r#ffi f,,ffi*schémaderuprureplaneinfi nie.Schematic sketch of an infinite plane failure.
6REVUE FRANçAISE DE GËOTECHNIQUEN'993e trimestre 2000
F(cr)= (c'L + W cos c tan q')MI sin cx
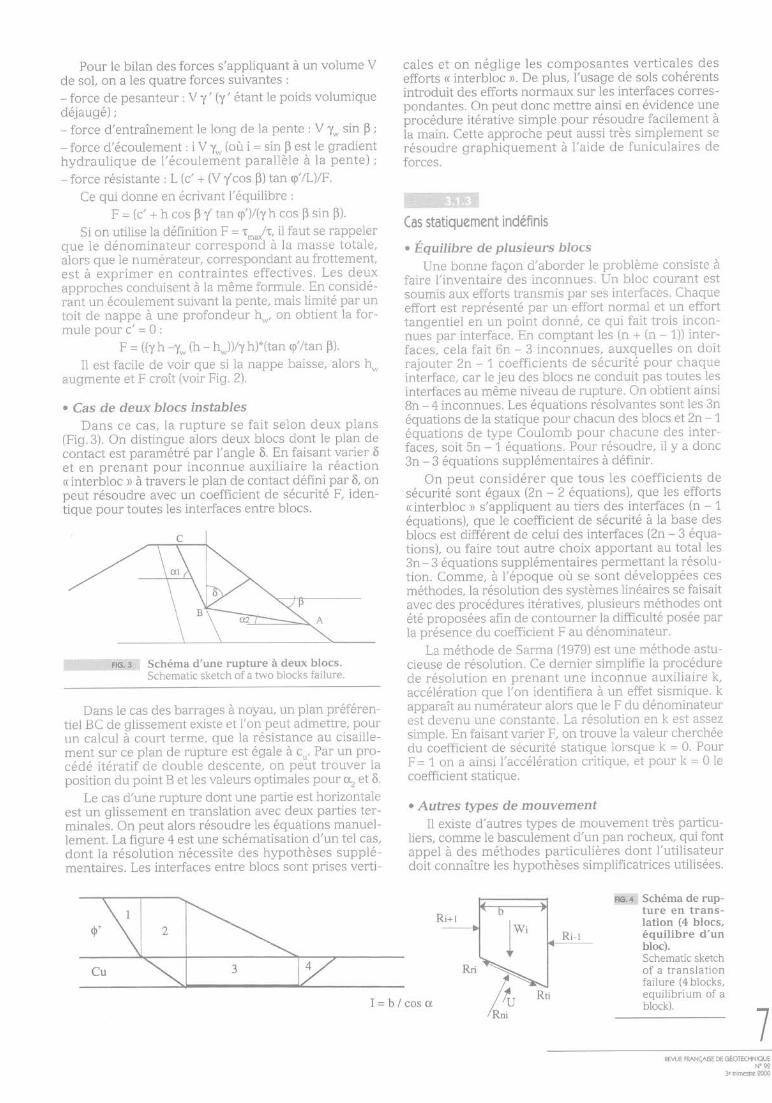
Pour Ie bilan des forces s'appliquant à un volume Vde sol, on a les quatre forces suivantes :
- force de pesanteur : V T ' (y' étant le poids volumiquedéjausé) ;
- force d'entraînement le long de la pente ; V T* sin B ;
- force d'écoulement : i V T* (où i = sin F .qt le gradienthydraulique de l'écoulement parallèle à la pente) ;
- force résistante : L (c' + (V y'cos F) tan <p'/L)/F.
Ce qui donne en écrivant l'équilibre :
F - (c' + h cos P ^( tan <p')/(y h cos F sin F).
Si on utilise la définition F - x^u11, il faut se rappelerque Ie dénominateur corresponA à Ia masse totale,alors que le numérateur, Correspondant au frottement,,est à exprimer en contraintes effectives. Les deuxapproches conduisent à la même formule. En considé-rant un écoulement suivant la pente, mais limité par untoit de nappe à une profondeur h*, on obtient la for-mule pour c' - 0 :
p = ((y h -T* Gr - h*))/y h)*(tan <p'ltan B).
Il est facile de voir que si la nappe baisse, alors h*augmente et F croît (voir Fig. 2).
. Cas de deux blocs instablesDans ce cas, la rupture se fait selon deux plans
(Fig.3). On distingue alors deux blocs dont le plan decontact est param étré par l'angle ô. En faisant varier ô
et en prenant pour inconnue auxiliaire la réactionrc interbloc I à travers le plan de contact défini par ô, onpeut résoudre avec un coefficient de sécurité F, iden-tique pour toutes les interfaces entre blocs.
ii,tTË;fij.ifirftï Schéma d'une rupture à deux blocs.Schematic sketch of a two blocks failure.
Dans le cas des barrages à noyau, uh plan préféren-tiel BC de glissement existe et l'on peut admettre, pourun calcul à court terme, que Ia résistance au cisaille-ment Sur ce plan de rupture est égale à .,,. Par un pro-cédé itératif de double descente, on peut trouver laposition du point B et les valeurs optimales pour uzet ô.
Le cas d'une rupture dont une partie est horizontaleest un glissement en translation avec deux parties ter-minales. On peut alors résoudre les équations manuel-lement. La figure 4 est une schématisation d'un tel cas,dont Ia résolution nécessite des hypothèses supplé-mentaires. Les interfaces entre blocs sont prises verti-
cales et on néglige les composantes verticales desefforts a interbloc >. De plus, l'usage de sols cohérentsintroduit des efforts normaux sur les interfaces corres-pondantes. On peut donc mettre ainsi en évidence uneprocédure itérative simple pour résoudre facilement àla main. Cette approche peut aussi très simplement se
résoudre graphiquement à l'aide de funiculaires deforces.
,.WCas statiquement indéfinis
. Équilibre de plusieurs blocsUne bonne façon d'aborder le problème consiste à
faire l'inventaire des inconnues. Un bloc Courant estsoumis aux efforts transmis par Ses interfaces. Chaqueeffort est représenté par un effort normal et un efforttangentiel en un point donné, cQ qui fait trois incon-nues par interface. En comptant les (n + (n - 1)) inter-faces, cela fait 6n - 3 inconnues, auxquelles on doitrajout er 2n - 1 coefficients de sécurité pour chaqueinterfa ce, car le jeu des blocs ne conduit pas toutes lesinterfaces au même niveau de rupture. On obtient ainsiBn - 4 inconnues. Les équations résolvantes sont les 3néquations de la statique pour chacun des blocs et 2n - 1
équations de type Coulomb pour chacune des inter-faces, soit 5n - L équations. Pour résoudre, il y a donc3n - 3 équations supplémentaires à définir.
On peut considérer que tous les coefficients desécurité sont égaux (2n - 2 équations), que Ies effortsa interbloc > s'appliquent au tiers des interfaces (n - 1
équations), que le coefficient de sécurité à la base desblocs est différent de celui des interfaces (2n - 3 équa-tions), ou faire tout autre choix apportant au total les3n - 3 équations supplémentaires permettant la résolu-tion. Comme, à l'époque où se sont développées cesméthodes, la résolution des systèmes linéaires se faisaitavec des procédures itératives, plusieurs méthodes ontété proposées afin de contourner la difficulté posée parla présence du coefficient F au dénominateur.
La méthode de Sarma (1979) est une méthode astu-cieuse de résolution. Ce dernier simplifie la procédurede résolution en prenant une inconnue auxiliaire k,accélération que l'on identifiera à un effet sismique. kapparaît au numérateur alors que le F du dénominateurest devenu une constante . La résolution en k est assez
simple. En faisant varier F, on trouve la valeur cherchéedu coefficient de sécurité statique lorsque k - 0. PourF = 1 on a ainsi l'accélération critique, et pour k - 0 lecoefficient statique.
. Autres types de mouvementIl existe d'autres tlpes de mouvement très particu-
liers, Comme le basculement d'un pan rocheux, qui fontappel à des méthodes particulières dont l'utilisateurdoit connaître les hypothèses simplificatrices utilisées.
Schéma de rup-ture en trans-lation (4 blocs,équilibre d'unbloc).Schematic sketchof a translationfailure (4 blocks,equilibrium of a
block).
1REVUE FRANçAIsE oe eÉorEcHNIQUE
N" 993e trimestre 9000
1
Q' 2
Cu 3 vI=b/cosu
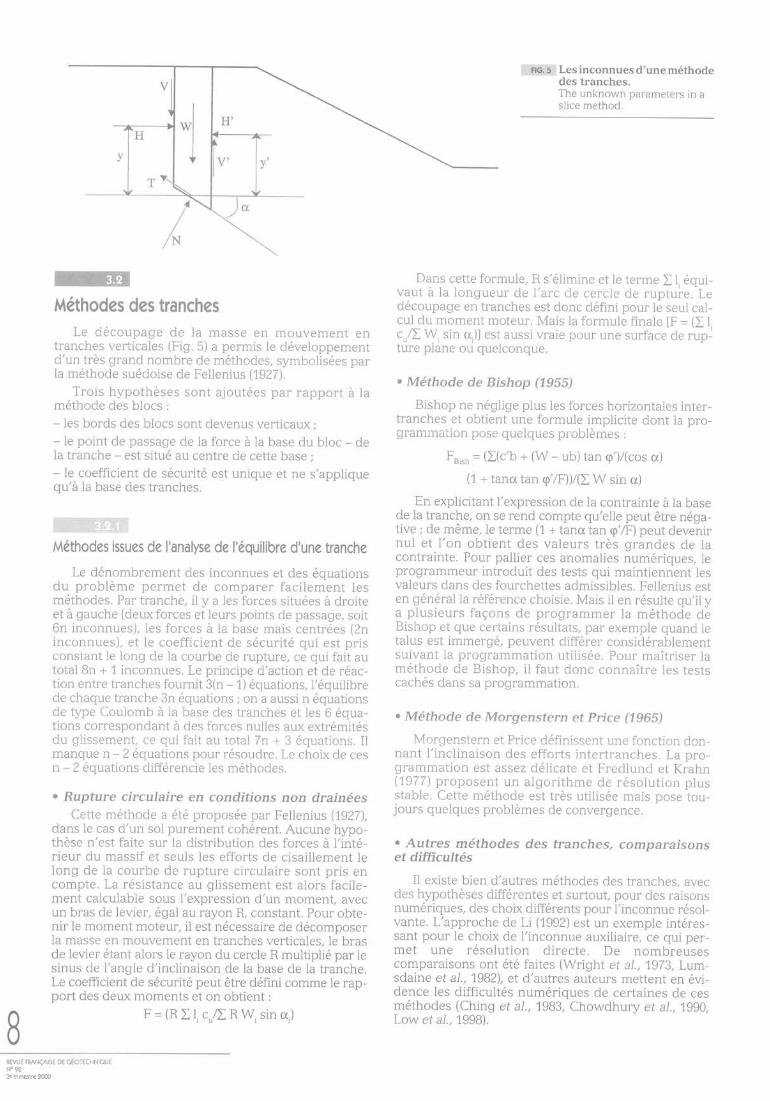
ffiMéthodes des tranches
Le découpage de la masse en mouvement entranches verticales (Fig. 5) a permis le développementd'un très grand nombre de méthodes, s5rmbolisées parla méthode suédoise de Fellenius (1927).
Trois hypothèses sont ajoutées par rapport à laméthode des blocs :
- les bords des blocs sont devenus verticaux ;
- Ie point de passage de la force à la base du bloc - dela tranche - est situé au centre de cette base ;
- Ie coefficient de sécurité est unique et ne s'appliquequ'à la base des tranches.
ffi iiir#l:""'Ïttrîu
Méthodes issues de l'analyse del'équilibre d'une tranche
Le dénombrement des inconnues et des équationsdu problème permet de comparer facilement lesméthodes. Par tranche, il y a les forces situées à droiteet à gauche (deux forces et leurs points de passage, soit6n inconnues), les forces à la base mais centrées (2ninconnues), et Ie coefficient de sécurité qui est prisconstant le long de la courbe de rupture, ce qui fait autotal Bn + 1 inconnues. Le principe d'action et de réac-tion entre tranches fournit 3(n - 1) équations, l'équilibrede chaque tranche 3n équations ; orr a aussi n équationsde type Coulomb à la base des tranches et les 6 équa-tions correspondant à des forces nulles aux extrémitésdu glissement, ce qui fait au total 7n + 3 équations. Ilmanque n - 2 équations pour résoudre. Le choix de cesn - 2 équations différencie les méthodes.
o Rupture circulaire en conditions non drainéesCette méthode a été proposée par Fellenius (1gZT),
dans Ie cas d'un sol purement cohérent. Aucune hypo-thèse n'est faite sur la distribution des forces à l'inté-rieur du massif et seuls les efforts de cisaillement lelong de la courbe de rupture circulaire sont pris encompte. La résistance au glissement est alors facile-ment calculable sous l'expression d'un moment, avecun bras de levier, égal au rayon R, constant. Pour obte-nir le moment moteur, il est nécessaire de décomposerIa masse en mouvement en tranches verticales, le brasde levier étant alors le rayon du cercle R multiplié par lesinus de l'angle d'inclinaison de Ia base de la tranche.Le coefficient de sécurité peut être défini comme le rap-port des deux moments et on obtient :
F-(RIl,cuÆRW,sinu,)
iiËÊ Les inconnues d'une méthodedes tranches.The unknown parameters in aslice method.
Dans cette formule, R s'élimine et le terme I l, équi-vaut à la longueur de I'arc de cercle de ruptui^e. Ledécoupage en tranches est donc défini pour le seul cal-cul du moment moteur. Mais la formule finale [F = (I l,cu/L W' sin a')1 est aussi waie pour une surface de rupJture plane ou quelconque.
o Méthode de Bfshop (lgSS)
Bishop ne néglige plus les forces horizontales inter-tranches et obtient une formule implicite dont Ia pro-grammation pose quelques problèmes :
F*,,n - (I(c'b + (W - ub) tan <p')/(cos o()
(1 + tancx tan ç'/F))/E W sin u)
En explicitant l'expression de Ia contrainte à la basede Ia tranche, on se rend compte qu'elle peut être néga-tive ; de même, Ie terme (1 + tancr tan ç'/F) peut devenirnul et l'on obtient des valeurs très grandes ,Ce lacontrainte. Pour pallier ces anomalies numériques, leprogrammeur introduit des tests qui maintiennent lesvaleurs dans des fourchettes admissibles. Fellenius esten général la référence choisie. Mais il en résulte qu'il ya plusieurs façons de programmer la méthode deBishop et que certains résultats, par exemple quand letalus est immergé, peuvent différer considérablementsuivant la programmation utilisée. Pour maîtriser laméthode de Bishop, il faut donc connaître les testscachés dans sa programmation.
. Méthode de Morgenstern et Price (7gGS)
Morgenstern et Price définissent une fonction don-nant f inclinaison des efforts intertranches. La pro-grammation est ass ez délicate et Fredlund et Krahn(1977) proposent un algorithme de résolution plusstable. Cette méthode est très utilisée mais pose tou-jours quelques problèmes de convergence.
o Autres méthodes des tranchês, comparaisonset difficultés
Il existe bien d'autres méthodes des tranches, avecdes hypothèses différentes et surtout, pour des raisonsnumériques, des choix différents pour l'inconnue résol-vante. L'approche de Li (1,992) est un exemple intéres-sant pour le choix de l'inconnue auxiliaire, ce qui per-met une résolution directe. De nombreusescomparaisons ont été faites (Wright et al., 1973, Lum-sdaine et al., 19Bz), et d'autres auteurs mettent en évi-dence les difficultés numériques de certaines de cesméthodes (Ching et aI., 1983, Chowdhury et al.,1gg0,Low et a1.,1998).I
REVUE FRANçAIsE DE cÉorecHNrourN'923e trimestre 2000
II
i
ffiMéthodes globales
Les méthodes globales (Caquot, 1954, Biarez, 1960)permettent une résolution graphique maintenant peuutilisée, mais l'informatique leur apporLe un renouveauintéressant, I'intégration de valeurs le long de courbesquelconques étant très simple par discrétisation. Leshypothèses utilisées sont les suivantes :
- Ia masse en mouvement est observée dans sonensemble, elie est délimitée par la courbe de rupture ;
- une fonction de répartition des contraintes normalesest paramétrée le long de Ia courbe de rupture;- ia résolution se fait avec les trois équations de la sta-tique appliquée à la masse en mouvement.
t Méthodes graphiquesTaylor (1937), puis Caquot (1954) ont développé une
méthode graphique permettant le calcul de rupturescirculaires dans un talus homogène cohérent et frot-tant, appelée méthode du cercle de frottement. Leterme de cohésion Ie iong de l'arc de cercle (de centreO et rayon R) est, du point de vue force équivalente,remplacé par une force parallèle à la corde de I'arc etde valeur c'1, I étant Ia longueur de i'arc. La réaction leIong de la courbe de rupture, inclinée à g', est tangenteau cercle de frottement centré en O et de rayon Rsin q',et on suppose que Ia résultante I'est aussi. Cette résul-tante passe par l'intersection des autres forces connues(poids, cohésion, et pression interstitielle). Biarez (1g60)évalue l'erreur induite par ces hypothèses ; elle est infé-rieure à15 % sur le coefficient de sécurité, en majorantla fonction de répartition des contraintes normales ieIong de Ia courbe de rupture.
Tavenas et Leroueil (1980, 1982) discutent dans lecadre de cette approche la signification du coefficient Frelativement à Ia distribution des contraintes normales.IIs montrent quelques non-sens et pfoposent uneapproche qui considère que la rupture est la fin d'unchemin de contraintes particulier en chaque point de lacourbe de rupture ; ils introduisent Ia notion de margede sécurité, évaluée en terme de pression interstitielle.Cette approche est donc une mis-e en forme différentedes paramètres intervenant dans un caicul de stabilité,en gardant le souci d'une interprétation physiquesimple du coefficient de sécurité.
On parle fréquemment aujourd'hui de sensibititéaux paramètres, ce qui traduit Ie commentaire de Ter-zaghi, fait en 1943 :
a Connaissant la complexité du terain et les diffé-rences notables entre Ia réalité et Ies propriétés don-nées au sol, aucune théorie de la stabilité ne peut êtreautre chose qu'une grossière approximation de la résis-tance face à Ia rupture. Si une méthode de calcul estsimple, nous pouvons facilement juger les consé-quences d'hypothèses dérivées ou supplémentaires etmodifier en conséquence nos décisions. Les méthodessophirtiquées n'ont pas cet avantage. )
Avec I'approche graphique, l'influence de la réparti-ton des confaintes normales Ie long de la courbe de rup-ture est bien mise en évidence. Cet aspect reste importantavec les méthodes numériques baséei sur un décôupageen tranches, qui permettent des intégrations faciles deforces élémentaires. L'efficacité des méthodes globalesdépend de ce fait du bon paramétrage de la répartitiondes contraintes normales le long de la courbe de rupture.
. Méthode de BeII (1969)Bell propose de prendre une fonction de répartition
de la contrainte normale Ie long de la courbe de rup-ture définie par deux paramètres À et p :
on : À yh + p sin (rc (x - xj/(x, - xo))
où x, X,, Xo sont les abscisses curvilignes du point cou-rant et des extrémités de la courbe de rupture. Cettefonction de répartition n'a pas permis à la méthode defournir des résultats probants.
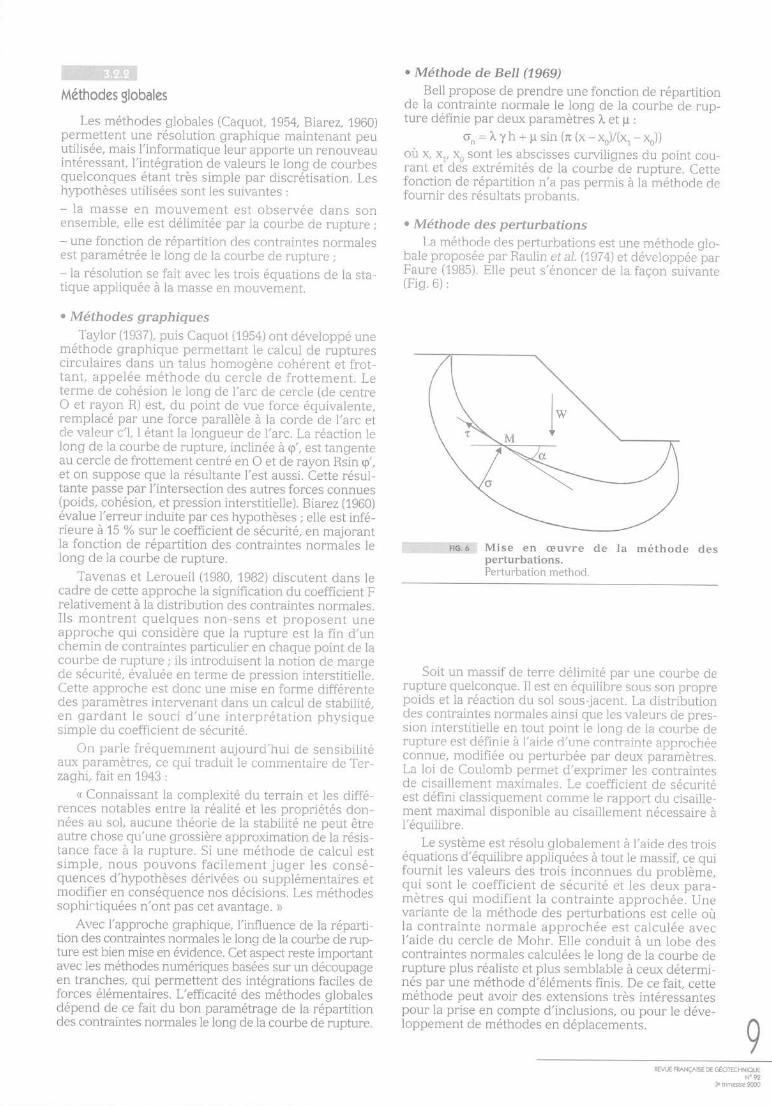
. Méthode des perturbationsLa méthode des perturbations est une méthode glo-
bale proposée par Raulin et al. (1,974) et développée parFaure (1985). Elle peut s'énoncer de la façon suivante(Fis. 6) :
itttnnilittllitiii,tili;tiiffiWiiri Mise en æuvre de la méthode desperturbations.Perturbation method.
Soit un massif de terre délimité par une courbe derupture quelconque. Il est en équilibre sous son proprepoids et la réaction du sol sous-jacent. La distributiondes contraintes normales ainsi que les valeurs de pres-sion interstitielle en tout point le long de la courbe derupture est définie à l'aide d'une contrainte approchéeconnue, modifiée ou perturbée par deux paramètres.La loi de Coulomb permet d'exprimer les contraintesde cisaillement maximales. Le coefficient de sécuritéest défini classiquement comme le rapport du cisaille-ment maximal disponible au cisaillement nécessaire àl'équilibre.
Le système est résolu globalement à l'aide des troiséquations d'équilibre appliquées à tout le massif, ce quifournit les valeurs des trois inconnues du problème,qui sont le coefficient de sécurité et les deux para-mètres qui modifient la contrainte approchée. Unevariante de la méthode des perturbations est celle oùla contrainte normale approchée est calculée avecl'aide du cercle de Mohr. Elle conduit à un lobe descontraintes normales calculées le long de la courbe derupture plus réaliste et plus semblable à ceux détermi-nés par une méthode d'éléments finis. De ce fait, cetteméthode peut avoir des extensions très intéressantespour la prise en compte d'inclusions, ou pour Ie déve-loppement de méthodes en déplacements.
9REVUE FRANÇAISE DE GÉoTEcHNIQUE
N" gg
3e trimestre 2000
M1"
ffiMéthodes probabilistes et logique floue
Ces méthodes tentent une prise en compte desincertitudes sur les différents paramètres. De nom-breux modèles statistiques existent, mais souffrent d'unnombre trop réduit de données (Magnan et a1.,1998)pour être vraiment opérationnels. La mise en æuvred'une méthode de Monte-Carlo (Chiasson et al., 1998)peut donner un aperçu de l'importance des incerti-tudes. Si chaque paramètre est défini dans un intervalleet possède une fonction de répartition, il est possible,dans un calcul itératif, de prendre un tirage de tous lesparamètres et d'obtenir un coefficient de sécurité (unrésultat de calcul). De nombreux tirages vont permetfrede construire la loi de distribution du coefficient desécurité.
La logique floue possède un immense champd'application dans la gestion des incertitudes en méca-nique des sols ; si les outils théoriques existent (Pham,1993), leur mise en æuvre n'est pas généralisée et unemutation des modes de raisonnement est à faire.
ffiMéthodes en trois dimensions
Azouz et Baligh (1983) ont montré que l'influence dela troisième dimension est en général faible , et ce tra-vail supplémentaire n'a de sens que pour des études defondations sur pentes. Gens et al. (1988) montrentcependant que l'erreur peut atteindre 30 "Â pour lessols cohérents. Le développement d'outil d'utilisationfacile dewait permettre de mieux situer la place de cesméthodes dans la boîte à outil de l'ingénieur (Hama,2001).
"'F'.,W., i',,,#,::,,ffi
Équilibre de blocs en trois dimensions
Les méthodes des blocs se développent facilementen trois dimensions, avec cependant les difficultés dereprésentation induites par la troisième dimension.C'est assez simple du point de vue mécanique, avec unbon choix d'hypothèses supplémentaires ; cependant,on est davantage confronté à des schémas de rupturemécaniquement inadmissibles lors de la recherche dela forme des blocs. En conditions bi-dimensionnelles,pour maîtriser les calculs, Sarma a introduit un critèred'admissibilité qui correspond à un non-décollementdes blocs. En conditions tri-dimensionnelles, c'estencore plus nécessaire, et les méthodes des blocs,maintenant aidées par des interfaces graphiques, sontutilisables quand la géomorphologie indique de façonnon ambiguë la forme des blocs. Pour traiter de l'incer-titude de la position des plans de rupture, uneapproche à l'aide de la logique floue a été faite dans lecas du dièdre (Faure et Maïolino, 2000).
'WMéthodes des colonnes
. ModèIe ClaraDéveloppé par Hungr (1987), ce modèle est une
extension à trois dimensions des modèles de tranches,
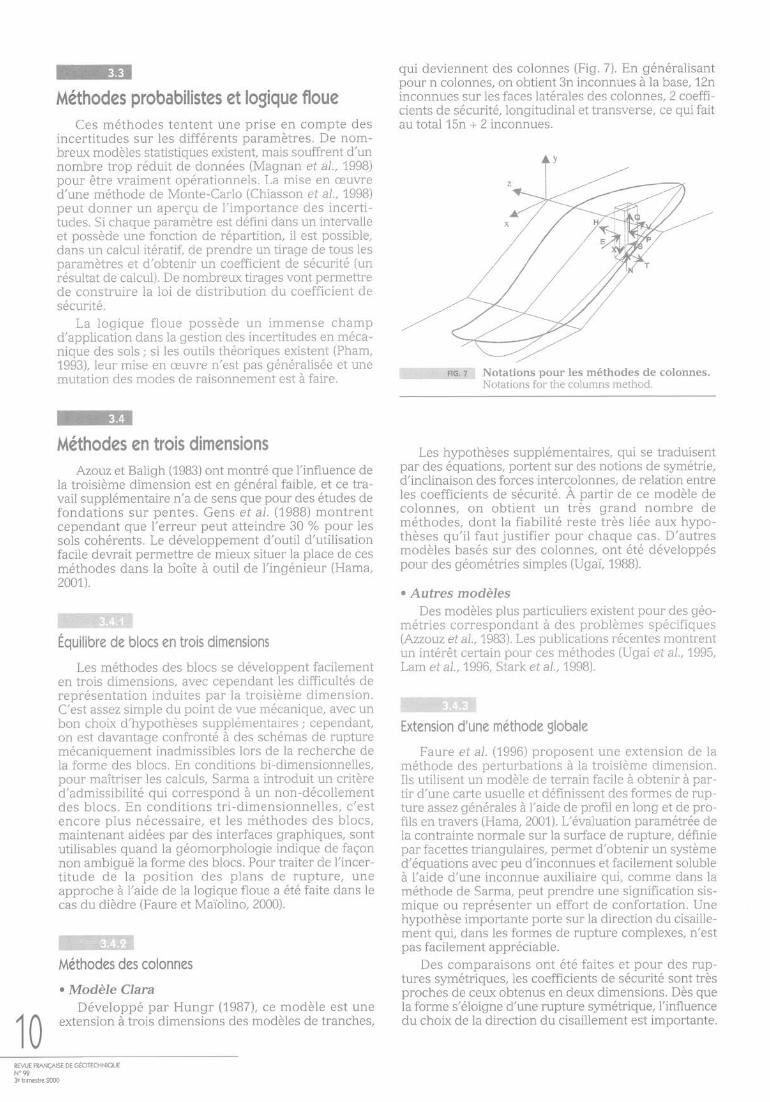
qui deviennent des colonnes (Fig .7).En généralisantpour n colonnes, on obtient 3n inconnues à 1a base, 12ninconnues sur les faces latérales des colonn es, 2 coeffi-cients de sécurité, Iongitudinal et transverse , ce qui faitau total 15n + 2 inconnues.
iiii:.yÉif'tirlf,4i,Tt, .tai,ffi...giri* Notations pour les méthode s deNotations for the columns method.
Les hypothèses supplémentaires, qui se traduisentpar des équations, portent sur des notions de s5rmétrie,d'inclinaison des forces intercolonnes, de relation entreles coefficients de sécurité. À partir de ce modèle decolonnes, on obtient un très grand nombre deméthodes, dont la fiabilité reste très liée aux hypo-thèses qu'il faut justifier pour chaque cas. D'autresmodèles basés sur des colonnes, ont été développéspour des géométries simples (Ugaï, 19BB).
o Autres modèIesDes modèles plus particuliers existent pour des géo-
métries correspondant à des problèmes spécifiques(Azzouz et a1.,1983). Les publications récentes montrentun intérêt certain pour ces méthodes (Ugai et aL,1995,Lam et aI., 1,996, Stark et aI., 1998).
iii!,Wffi,W:1,Ër,1ffi
Extension d'une m,ëthode globale
Faure et al. (1996) proposent une extension de Iaméthode des perturbations à la troisième dimension.Ils utilisent un modèle de terrain facile à obtenir à par-tir d'une carte usuelle et définissent des formes de rup-ture assez générales à l'aide de profil en long et de pro-fils en travers (Hama,2001). L'évaluation paramétrée dela contrainte normale sur la surface de rupture, définiepar facettes triangulaires, permet d'obtenir un systèmed'équations avec peu d'inconnues et facilement solubleà l'aide d'une inconnue auxiliaire qui, comme dans laméthode de Sarma, peut prendre une signification sis-mique ou représenter un effort de confortation. Unehypothèse importante porte sur la direction du cisaille-ment qui, dans les formes de rupture complexes, n'estpas facilement appréciable.
Des comparaisons ont été faites et pour des rup-tures s5rmétriques, les coefficients de sécurité sont trèsproches de ceux obtenus en deux dimensions. Dès quela forme s'éloigne d'une rupture s5rmétrique, l'influencedu choix de la direction du cisaillement est importante.
10REVUE FRANçAIsE oE cÉorEcHNlQUEN" 993e trimestr€ 9000
colonnes.
EPrise encompte du déplacementdans les méthodes à la rupture
Le but de ces approches est de fournir, bien pluséconomiquement que par éléments finis en termes detemps et de difficulté d'obtention des paramètres, desvaleurs de déplacements lorsque les conditions dechargement de la pente varient. De plus en plus, lesconstructeurs d'ouvrages veulent des réponses enterme de déplacement plus qu'en termes de coefficientde sécurité, car si l'on sait faire des talus qui tiennent,sait-on les garantir avec un déplacement à venir infé-rieur à une valeur donnée ?
Des extensions des méthodes de calcul à la ruptureont été faites pour :
- expliquer le phénomène de rupture progressive ;
- évaluer le coefficient de sécurité en fonction d'undéplacement mesuré par inclinométrie ;
- étudier la réactivation d'un glissement en utilisant lavitesse de déformation, ce qui élimine le problème deI'état initial ;
- comparer des méthodes confortatives ;
- prévoir l'al éa et parfois la date de rupture, après avoircalé les paramètres du modèle par analyse à rebourssur une période connue pendant laquelle tout a étémesuré.
Les déplacements dans une pente sont difficiles àcerner. Quand on découwe le mouvement d'une pente,on ne sait jamais depuis combien de temps il se pro-duit. Il est donc nécessaire de faire une hypothèseimportante - et dont dépendra la validité de la méthode- pour poser le problème. On voit déjà une différenceimportante entre pente naturelle et excavation.
Modèles simples
Les premières recherches sur les calculs en dépla-cement (Bjerrum, 1,967 ; Bishop, 1971 ; Law et Lumb,1978; Chowdhury et al., 1987) ne tenaient pas comptedes déplacements comme paramètre de calcul.
Bjerrum (1967) s'intéresse à la rupture progressiveet considère une chute de la résistance au-delà d'unseuil. II développe son modèle pour un glissement plan.Bishop (1971) modifie sa méthode en introduisant unfacteur résiduel local prédéfini ; il montre qu'avec cer-taines distributions le long du cercle de rupture, lecoefficient de sécurité varie de façon significative. Lawet Lumb (1978) modifient une méthode des tranches etredistribuent les efforts perdus après le pic (défini partoi.) dans un processus itératif. Ils trouvent ainsi deséquilibres où un certain nombre (m) de tranches est encisaillement résiduel (défini par r.a"i.r), alors que d'autres(n) n'ont pas dépassé le pic. Ils"définissent alors uncoefficient de sécurité global qui tient compte de cettedifférenciation des tranches. La définition du coefficientde sécurité de Law et Lumb est donnée par l'expres-sion :
Chowdhury et al. 19BT développent un rnodèle où lephénomène de rupture progressive est régi par une loiprobabiliste.
ljne seconde série de méthodes (Christian et Whit-man, 1969 ; Athanasiu, 1980; Bernander et al., 1984 et1989; Faure et al., 1992; Chowdury, 1995) introduit ledéplacement comme paramètre de calcul et, de ce fait,fait intervenir l'élasticité du sol.
Christian et \Mhitman (1969) traitent un glissementplan formé d'une couche d'argile élastique (module E)d'épaisseur constante (h). Ce problème à une dimen-sion conduit à une équation différentielle que l'on peutfacilement résoudre :
n2ï-.r o-u
[ =,EO.-ex'
où Ox est parallèle à la pente et u est le déplacementsuivant Ox.
Athanasiu (1980) considère dans sa méthode unensemble de tranches élastiques dont le déplacementle long de la courbe de rupture est fonction du cisaille-ment. L'équation d'équilibre se transforme en équa-tion aux déplacements et est résolue par inversiond'un système linéaire. Une analyse non linéaire peutêtre faite en déterminant, pas à pas, un module decisaillement sécant. Bernader et al. (1.984, 19Bg) amé-liorent le modèle d'Athanasiu en supposant que ledéplacement est le résultat d'une distorsion augmen-tée d'un glissement à la base. Farhat (1990) dans sathèse, puis Faure et al. (1992) présentent un modèlequi tient compte de la contrainte normale le long deIa courbe de rupture et paramètrent la loi effort-défor-mation en fonction de cette contrainte normale, quiest fournie par la méthode des perturbations. Cemodèle semble bien adapté pour des études compa-ratives de solutions confortatives ou pour un calageaprès une période de mesures, afin de prévoir lesdéplacements à venir en fonction du niveau de lanappe par exemple. Chowdury (1995) propose unautre processus de simulation.
ffilntroduction du param ètre temps
iiifr ,,,r#:,:lir.,:,,tæ*
Tentatives pour la prise en compte du temps
Après la rupture progressive (ou régressive) vued'un point de vue mécanique, des auteurs se sont inté-ressés à l'évolution d'une pente dans le temps. L'expé-rience montre que des ruptures peuvent se produire àchargement constant, au bout d'un certain temps, etqu'auparavant il y a eu des déformations. La résistanceau cisaillement peut être modélisée par décroissancelogarithmique en fonction du temps et par la prise encompte de Ia chute de résistance après le pic. Onobtient donc un coefficient de sécurité en fonction dutemps. Ces approches dewaient se développer car ellesfournissent rapidement, une réponse en termes dedéplacement, avec des schémas de calcul simples àcomprendre.
tnmll-n*n, IF -l I rpi,*f r.",ia irll'lLT 1, -l tT I
11REVUE TRANçAISE DE GÉoTEcHNIQUE
N. gg
3e trimestre 2000
ti.i:iiiiil:tiij:tiiri!,.i.tlïliittititii:::itiii:::irjiittiiiii:iai:iitii.iii.t+1|:littiti:i:i:iitii:iit.+iiiiiilitiiiiti.tijii:iti)1:.ij;iiii.i'. i:.:iii: :ti tiii: ::1 ,:i:,:,:::::ti!t!tt!;t:lll/|!;tttt:tti:t:r:.:i41:a:ittt:.r-r 1:iti.t-...t J.i:ttt::-....: tttt:tt:tl:
Calcul des déplac emenls à partir d'une modélisationdu fluage
Le fluage désigne l'aptitude d'un matériau à sedéformer sous charge constante. Le temps est donc unfacteur important du phénomène. De nombreuxauteurs ont essayé, à partir de formulations plus oumoins complexes, d'évaluer le déplacement d'unepente. En général, les formulations étaient incomplètescar Ie fluage présente plusieurs aspects, influencés parde nombreux paramètres. Rappelons le phénomènefluage, puis les principales approches proposées.
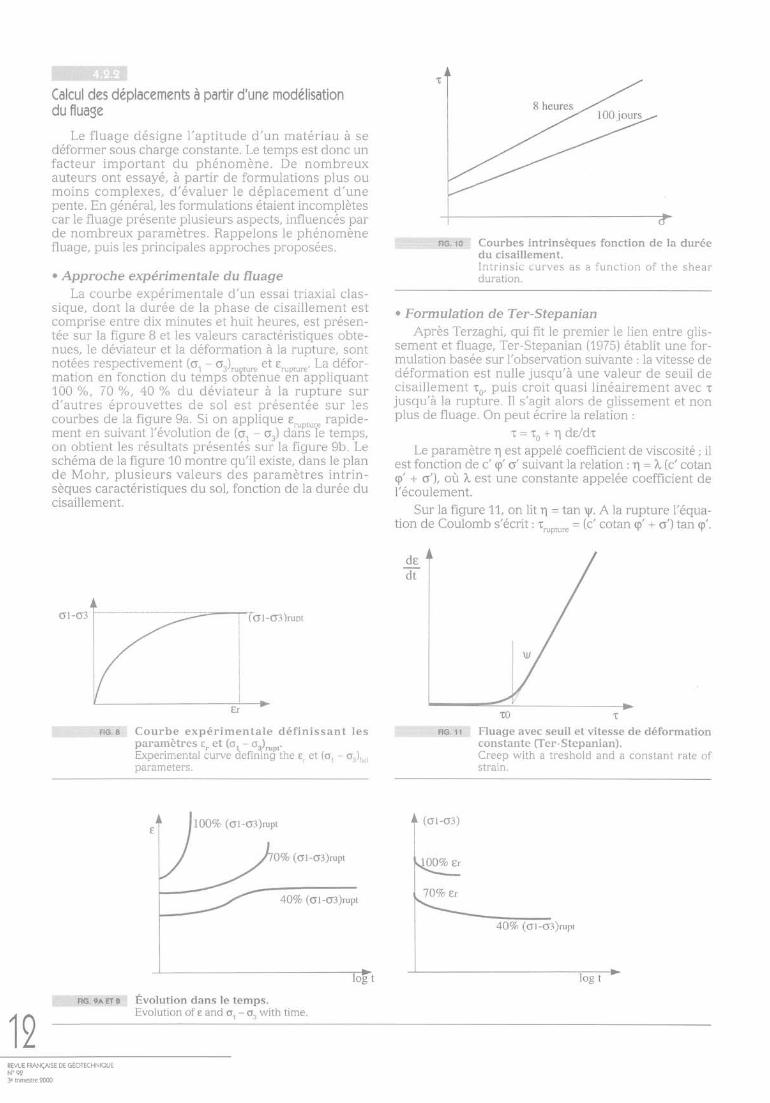
. Approche expérimentale du tluageLa courbe expérimentale d'un essai triaxial clas-
sique, dont la durée de la phase de cisaillement estcomprise entre dix minutes et huit heures, est présen-tée sur la figure B et les valeurs caractéristiques obte-nues, le déviateur et Ia déformation à la rupture, sontnotées respectivemepl (or - or).uotr." €t trupture. La défor-mation en fonction du temps obtenue ein appliquant100 o/o, 70 o/o, 40 % du déviateur à la rupture surd'autres éprouvettes de sol est présentée sur lescourbes de la figure 9a. Si on appliqu€ r,uot,." râpide-ment en suivant I'évolution de (o, - or) dans Ie temps,on obtient les résultats présentés sur la figure 9b. Leschéma de }a figure 10 montre qu'il existe, dans le plande Mohr, plusieurs valeurs des paramètres intrin-sèques caractéristiques du sol, fonction de la durée ducisaillement.
o1-o3 O1-O3 )rupt
iiiititii*iitiitiiifiatifilln';iffiiffiiiii;t Courbes intrinsèques fonction de la duréedu cisaillement.Intrinsic curves as a function of the shearduration.
. Formulation de Ter-StepanianAprès Terzaghi, qui fit le premier le lien entre glis-
sement et fluage, Ter-Stepanian (1975) établit une for-mulation basée sur I'observation suivante : la vitesse dedéformation est nulle jusqu'à une valeur de seuil decisaillement ro, puis croit quasi linéairement avec rjusqu'à la rupture. Il s'agit alors de glissement et nonplus de fluage. On peut écrire la relation :
x:ro+n de/dtLe paramètre q est appelé coefficient de viscosité ; il
est fonction de c' q' 6' suivant la relation : I - l" (c' cotan(p' + o'), où l, est une constante appelée coefficient del'écoulement.
Sur la figure LL, on lit q - tan y. A la rupture l'équa-tion de Coulomb s'écrit i T.rotu." - (c' cotan (p' + o') tan g'.
deor
TOTii*iiitliiiiiÏiriiiiiiiiiifiilffililfilltiiiiiiii Fluage avec seuil et vitesse de déformation
constante (Ter- Stepanian).Creep with a treshold and a constant rate ofstrain.
[iiii1xliiiilixiifrl|iiÏilçïi#x*; iii|ii Courbe expérimentale définissant lesparamètres e" et (o, - oa).,,ot.Experimental curve definin$ the e, s1 (or - ou)ru,,
parameters.
ittnt{{'ttiltffi##iffi#ïfii Évolution dan s Ie temps.Evolution of e and oi - o" with time.
IAOVo (ot-o:)rupt
}Vo (ot-o3)rupt
40Vo (ol-o3)rupt
(o t -oa)
40% (ot -o:)rupt
12REVUE FRANçAIsE or cÉotrcHNteuEN" 923e trimestre 2000
En posant :
tan 0 - r/(c' cotan q' + o') et tan 0o = to/(c' cotan q' + o')On obtient :
tan0-tan0o+e/?u.Ter Stepanian applique cette formule à une pente
infinie et montre qu'une partie de la pente, jusqu'à uneprofondeur calculée, est en mouvement. Le rôle de lanappe est bien mis en évidence : lorsque la nappemonte, t diminue et il y a mouvement.
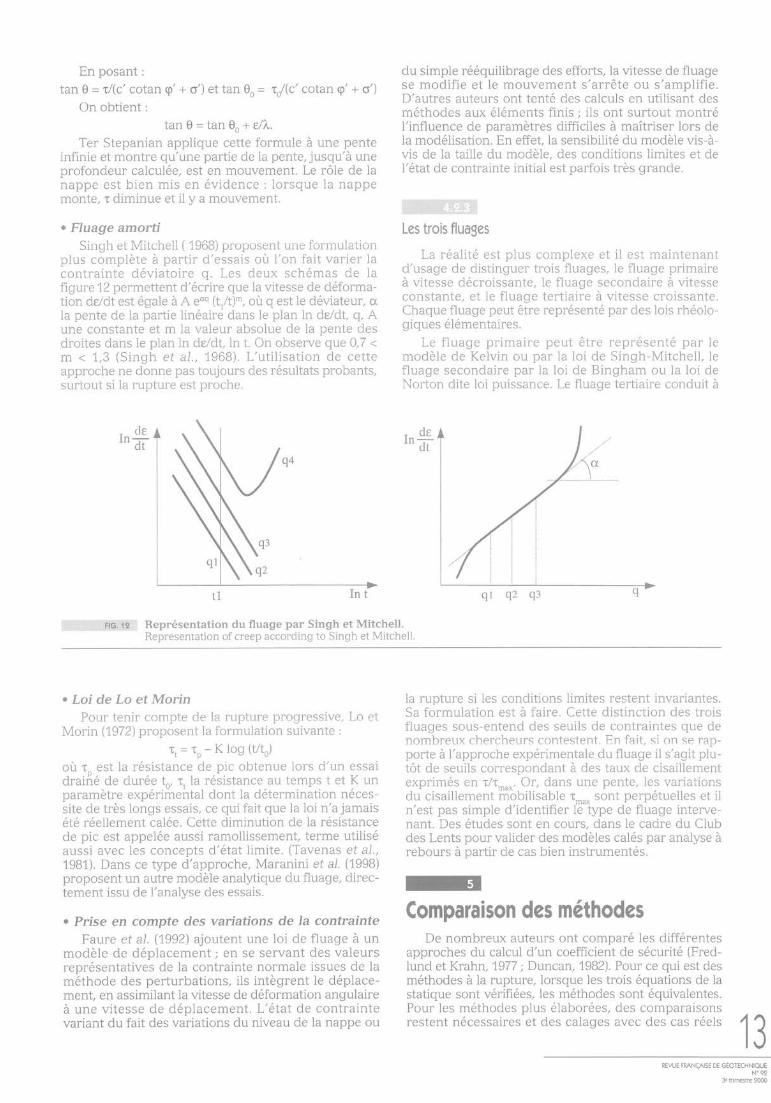
. Fluage amortiSingh et Mitchell ( 1968) proposent une formulation
plus complète à partir d'essais où l'on fait varier lacontrainte déviatoire q. Les deux schémas de lafigure 1,2 permettent d'écrire que la vitesse de déforma-tion de/dt est égale àA eoq (t./t)^, où q estle déviateur, cr
la pente de la partie linéairé dans le plan ln de/dt, q, Aune constante et m la valeur absolue de la pente desdroites dans le plan ln de/dt, ln t. On observe que 0,7 <mapproche ne donne pas toujours des résultats probants,surtout si la rupture est proche.
du simple rééquilibrage des efforts, la vitesse de fluagese modifie et le mouvement s'arrête ou s'amplifie.D'autres auteurs ont tenté des calculs en utilisant desméthodes aux éléments finis ; ils ont surtout montrél'influence de paramètres difficiles à maîtriser lors dela modélisation. En effet, la sensibilité du modèle vis-à-vis de Ia taille du modèle, des conditions limites et del'état de contrainte initial est parfois très grande.
Les trois fluages
La réalité est plus complexe et il est maintenantd'usage de distinguer trois fluages, le fluage primaireà vitesse décroissante, le fluage secondaire à vitesseconstante, et le fluage tertiaire à vitesse croissante.Chaque fluage peut être représenté par des lois rhéolo-giques élémentaires.
Le fluage primaire peut être représenté par lemodèle de Kelvin ou par la loi de Singh-Mitchell, lefluage secondaire par la loi de Bingham ou Ia loi deNorton dite loi puissance. Le fluage tertiaire conduit à
In q2 q3
liir,iî;rrtii:iïii.!,!:tniriiiîtffi719*i Représentation du fluage par Singh et Mitchell.Representation of creep according to Singh et Mitcheil.
. Loi de Lo et MorinPour tenir compte de la rupture progressive, Lo et
Morin (1972) proposent la formulation suivante :
tr: rp - K log (t/to)
où T^ est la résistance de pic obtenue lors d'un essaidraiÀé de dur ée to, t, la résistance au temps t et K unparamètre expérimental dont la détermination néces-site de très longs essais, ce qui fait que la loi n'ajamaisété réellement calée. Cette diminution de la résistancede pic est appelée aussi ramollissement, terme utiliséaussi avec les concepts d'état limite. (Tavenas et al.,1981). Dans ce type d'approche, Maranini et al. (1998)proposent un autre modèle analytique du fluage, direc-tement issu de l'analyse des essais.
. Pris e en compte des variations de Ia contrainteFaure et aI. (1992) ajoutent une loi de fluage à un
modèle de déplacement ; en se servant des valeursreprésentatives de la contrainte normale issues de laméthode des perturbations, ils intègrent Ie déplace-ment, en assimilant la vitesse de déformation angulaireà une vitesse de déplacement. L'état de contraintevariant du fait des variations du niveau de la nappe ou
la rupture si les conditions limites restent invariantes.Sa formulation est à faire. Cette distinction des troisfluages sous-entend des seuils de contraintes que denombreux chercheurs contestent. En fait, si on se rap-porte à l'approche expérimentale du fluage il s'agit plu-tôt de seuils correspondant à des taux de cisaillementexprimés en t/t^u*. Or, dans une pente, les variationsdu cisaillement mobilisable r-u" sont perpétuelles et iln'est pas simple d'identifier le type de fluage interve-nant. Des études sont en cours, dans le cadre du Clubdes Lents pour valider des modèles calés par analyse à
rebours à partir de cas bien instrumentés.
EComparaison des méthodes
De nombreux auteurs ont comparé les différentesapproches du calcul d'un coefficient de sécurité (Fred-lund et Krahn, 1977; Duncan, 1982). Pour ce qui est desméthodes à la rupture, lorsque les trois équations de lastatique sont vérifiées, les méthodes sont équivalentes.Pour les méthodes plus élaborées, des comparaisonsrestent nécessaires et des calages avec des cas réels
13REVUE FRANçAISE DE GÉoTEcHNIQUE
N'923e trimestre 2000
attesteront du bien-fondé des méthodes. Une base decas est donc à bâtir, ainsi qu'un catalogue des comparai-sons, pow que tous les chercheurs, via Internet profitentdes travaux déjà réalisés. Une des premières tentativesde comparaisons objectives a été faite par les Australienslors du projet ACADS (Donald et aI., 1992). Une suite àces travaux a été donnée dans Wass (Faure et a1.,1999).
EMise en cauvre des méthodes
Pour compléter cette description de la diversité desméthodes de calculs, il convient de rappeler gue chaqueméthode est particulière, délicate à maîtriser et qu'il estparfois tentant, du fait de délais de réponse de plus enplus courts, d'utiliser la méthode que l'on possède dansdes situations où elle ne devrait pas être employée.
ffiMise enæuvre des méthodes etëvaluationde la stabilité
Les automatismes de recherche permettent de défi-nir la surface de rupture la plus critique, grâce à lapuissance des calculateurs. NTous sommes bien loin desabaques si laborieusement élaborées, à une époque oùchaque calcul se comptait en heures.
Évaluer une stabilité de pente passe surtout par lechoix du coefficient de sécurité qui est associé auxméthodes, ce qui peut poser des problèmes lors de com-paraisons. Mais quelle que soit Ia méthode adoptée, uneanalyse de sensibilité est recommandée, car il est toujoursbon de savoir le rôle de chacun des paramètres afin dedéterminer le paramètre prépondérant, celui qui pilote lastabilité. L'étude géotechnique dewa en tenir compte etun retour sur le terrain est parfois souhaitable. On peutaussi raisonner avec une notion de marge de sécurité, quiconsiste à définir la valeur limite d'un paramètre dedimensionnement, par exemple la hauteur d'un talus.
Une fois bien défini, le coefficient de sécurité se posela question de sa valeur cible. Dans le cas des pentesnaturelles, une analyse à rebours donnera une valeur decomparaison à ne pas minorer. Pour les déblais, avec ladéfinition usuelle du coefficient de sécurité, on visera1,5 ; mais avec des méthodes en déplacements, on cher-chera à atteindre un déplacement acceptable pour lastructure envisagée. Pour les talus confortés, on recher-chera une amélioration d'au moins 20 % du coefficientde sécurité par l'action du confortement.
Rappelons que l'observation, quand elle est rappor-tée (Lebuis, 1983), et l'analyse à rebours sont un moyenefficace pour caler des valeurs qui font souvent défaut àl'ingénieur (Dunc an et al., 1992).
ffiLimitations des analysesde stabilité actuelles
L'analyse de Ia stabilité d'une pente peut être miseen défaut lorsque l'utilisation qui en est faite demandeplus que la méthode ne peut donner. Pour illustrer cepropos remarquons les points suivants :
- Ie coefficient de sécurité est étroitement Iié avec lavitesse de déplacement (Cartier et Pouget, 1986). Lacourbe donnant le coefficient de sécurité F en fonctionde Ia vitesse de déplacement montre que pour F infé-rieur à 1.,3, ce n'est plus tout à fait un équilibre statiqueque l'on calcule;
- la définition de F ne prend pas en compte le chemi-nement de contraintes (Tavenas et a1., 1981) ;
- Ie Iobe des contraintes normales le long de la courbede rupture est très sensible à Ia méthode et à la discré-tisation. De ce fait, il ne peut être employé sans précau-tions dans des extensions de méthode. Ainsi, laméthode de Bishop ne se prête pas à I'addition deforces externes, qui comme dans le cas du clouage,sont censées modifier ce lobe de contraintes ;
- la définition du régime hydraulique et sa prise encompte sont des points importants dans une étude destabilité; mal maîtrisés, peuvent conduire à des résul-tats erronés.
Ces remarques rejoignent I'avertissement du Pro-fesseur Lambe cité dans I'introduction, qui demandaitde maîtriser et la méthode et Ies paramètres pour obte-nir un résultat fiable. Mais nous avons vu que les nom-breux développements en cours, avec des interfacesconviviales de plus en plus performants, devraientapporter une aide efficace à l'ingénieur.
nilNature du problèmq conditions drainéesou non drainées
Un point clé de la stabilité des pentes est le typed'approche à utiliser dans un calcui. Les méthodes sontIes mêmes dans tous les cas, mais les paramètres àprendre en compte peuvent être très différents suivantque l'on conduira le calcul en mode drainé, non drainé,partiellement drainé ou partiellement saturé. Celarevient à poser la question : combien dure le courtterme ?
Des anecdotes fournissent une réponse bien nar-tielle : Skempton (1964, 1977)montre que, dans l'aigilede Londres, la redistribution des pressions intersti-tielles peut prendre des décennies ; pour Ie déblai de laBosse-Galin (Blondeau et a1., 1.976), Ie comportementfut essentiellement drainé, Ie long terme étànt atteintIors des travaux. Entre ces deux extrêmes, I'expériencede l'ingénieur, faute d'une base de cas régionaux, estune donnée essentielle dans la prise de décision.
Dans le cas d'excavations ou d'applications de sur-charges rapides, de tremblements de terre, d'abaisse-ment rapide d'un niveau d'eau, etc., il peut y avoir deschangements de pressions interstitielles, à indice desvides approximativement constant. Ces changementsde pression interstitielle en conditions non drainéessont Ie plus souvent difficiles à estimer et les analysesen contraintes effectives ne peuvent être appiiquées. Ilconvient alors de faire une analyse en conditions nondrainées, sur la base d'une résistance au cisaillementnon drainé.
II est connu que, pour de nombreux cas simples, onretrouve des écoulements descendants en haut de taluset des écoulements ascendants en pied de talus. Lesapproches consistant à supposer un coefficient de pres-sion interstitielle r,, constant (r,, = u/çh, où u est Ia pres-sion interstitielle ù point conËidéré'êt h hauteur de sol
14REVUE FRANçAISE DE GÉoTECHNIQUEN" 993e trimestre 2000

au-dessus de ce point), ou à considérer u - y*h* (où h*est la différence d'élévation entre la nappe phréatiqueet le point considéré), ne sont généralement pas satis-faisantes.
Des codes de calcul, américains pour l'essentiel,introduisent vers la partie haute de la rupture une par-tie fissurée permettant de prendre en compte unepoussée hydrostatique hortzontale, comme si cette fis-sure était remplie d'eau. Ce détail prend toute sonimportance dans des pays semi-arides, où Ia dessicca-tion des sols peut créer des fissures profondes qui seremplissent d'eau à Ia première pluie . La stabilité despentes submergées peut se faire avec les codes de cal-cul usuels en apportant une attention toute particulièreau choix des paramètres.
Bibliographie
Athanasiu C. - a Non linear slope stabilityanalysis r. Proc 3rd ISL, New Delhi,1980, p.259-262.
Azzouz A.S., Baligh M. - a Loaded areas oncohesive slopes r. J. ASCE vol. 109, GT5,1983, p. 726-729.
Bell J.M. - <c Non circuiar sliding surface r.J. SMFD vol.95, SM 3, 1969, p.829-844.
Bernander S., Gustas H., Olofsson J.a Improved model for progressive fai-lure analysis of slope stability >. Proc12th ICSMFE, Rio de Janeiro, vol. 3,1989, p. 1539-1,542.
Bernander S., Gustass H. - < Considerationof in sifu stresses in clay slopes withspecial reference to progressive failureanalysis >. 4ti:r ISL, 1,984, p.235-240.
Biarez J. - a Remarques sur la stabilité destalus. Influence de Ia loi de répartitiondes contraintes >>. Archiwum hydroteck-niki, tome 7, L960.
Bishop A.W. - rc The use of the slip circlein the stability analysis of slopes >. Geo-technique vol. 5, 1,1955, p.7 -17 .
Bishop A.W. - a The influence of progres-sive failure on the choice of the methodof stability analysis >>. Geotechnique vol.21, n" 2, 1971, p. 168-172.
Bjerrum L. - ( Progressive failure in slopesof overconsolidated plastic clay and clayshales r. ASCE, J. SMFD V93, SMs,4(\/1-7 0 Âr\lyu/ / IJ. J-'iv.
Blondeau F., Queyroi D. - a Rupture de latranchée expérimentale de la BosseGalin >>. Bull. de Liaiason des Labora-toitres des Ponts et Chaussées no spécial3, 1976.
Caquot A. - ( Méthode exacte pour le cal-cul de la rupture d'un massif par glisse-ment cylindrique >>. Annales des Ponts etChaussées n" 3, 1954, p. 345-355.
Cartier G., Pouget P. - < Corrélations entrela pluviométrie et les déplacements depentes instables l. 9th European Conf.on SMFE,1987.
Chiasson P., Djebbari Z. - < Stochasticslope stability analysis of temporarycuts in clay >1. Proc. Hambourg Geot.Conf., 1998, p.57-60.
Ching R.K.H., Fredlund D.G. - < Some dif-ficulties associated with the limit equili-brium method of slices >>. Can. Geoth. J.20, 1983, p. 661 -672.
Chowdhury R.N. a Progressive failureconsiderations in slope stability analy-sis >. Proc. 6th ISL, Christchurch, Land-slides, Bell Ed., 1995, p. 1659-1663.
EConclusion
Dans le domaine du calcul en stabilité de pentes,l'avenir reste porteur d'importantes innovations infor-matiques basées sur une observation toujours plus pré-cise des phénomènes. L'informatique est un formidableoutil permettant de simuler et d'évaluer le poids desparamètres, mais la visite sur le terrain restera toujoursla première chose à faire lors de l'étude d'un phéno-mène d'instabilité, car c'est encore l'æil de l'ingénieurqui identifiera le mieux les facteurs utiles à I'étuded'une pente, Ies calculs permettant de quantifier lesintuitions de l'homme de terrain.
Chowdhury R.N., Zhang S. - ( Conver-gence aspect of limit equilibriummethods for slopes >>. Can. Geoth. J. 27,1990, p. 145-151.
Chowdhury R.N., Tang W.H., Sidi I.a Reliabiiity model of progressive fai-lure >>. Geotechnique vol. 37, n" 4, 1,987,p. 467 -481.
Christian J.T., Whitman P.V. - ( A onedimension model for progressive fai-lure >. Proc of 7th ICSMFE, Mexico, vol.2, 1969, p.541-545.
Donald I. 8., Giam P.S.K. * < The ACADSslope stability programs review >. Proc.6th ISL, Christchurch, Landslides BellEd., 1,992.
Duncan J.M., Stark T.D. - a Soils strengthsfrom back analysis of slope failure. Sta-bility and performance of slopes andembankements 2 ). ASCE GSP 31,1,992,p. 890-904.
Duncan J.M., Wright S.G. - rc The accuracyof the equilibrium methods of slopesstability anaiysis l. Proc. int. Symp. onLandslides New Delhi, vol. 1, 1982,p.247 -254.
Faure R.M. - < Outils numériques en méca-nique des sols >. Thèse Paris 6, 1982.
Faure R.M. - (( Analyse des contraintesdans un talus par la méthode des per-turbations r. Fevu e française de Géo-technique no 33,1985, p. 49-59.
Faure R.M., Seve G., Farhat H., Virollet M.,Delmas P. - < A new methodology forevaluation of landsiides displacement r.Proc. 6th ISL, Landslides Bell Ed., 1992.
Faure R.M., Pham M., Robinson J.-C., JollyP. - rc Three dimensional slope stabiiityby the perturbation method >. Proc. 7thISL, Trondheim, 1996.
Faure R.M. - cc Data bases and the mana-gement of landslides ). ISL 99, Shikoku,Japon, 1999.
Faure R.M., Maïolino S. - < Evaluation ofrock slope stability using fuzzy logic >.
Bth ISL, Cardiff, 2000.Farhat H. - cc Prise en compte du temps et
des déplacements en stabilité despentes >. Thèse INSA de Lyon, 1990,187 p.
Fellenius W. - Erdstatische berechnungenmit reibung und kohaesion. Berlin,Ernst, 1,927.
Fredlund D.G., Krahn J. - ( Comparison ofslope stability methods of analysis r.Can. Geot. J. vol . 14, 1977, p. 429-439.
Gens 4., Hutchinson J.N., Cavounidis -a Three dimensional analysis of slides incohesive soils >>. Geotechnique vol. 3B-1,1988, p.1-23.
Hama M. - ( Stabilité des pentes en troisdimensions >. Thèse ENTPE/INSA 2001.
Horn J.A. - < Computer analysis of slopestability >. J. ASCE vol.86, SM3, 1960.
Hungr O. - n An extension of Bishop sim-plified method of slope stability anaiysisto three dimensions >. Geotechniquen" 37, 1987, p.113-117.
Lambe T.W. - < Predictions in soils engi-neering >. Geotechnique n" 23, 1973.
Lam L., Fredlund D.G. - < Appropriateintercolumn force functions and lambdavalues for three-dimensional slope sta-bility analysis >. 7th ISL, Trondheim,1996, p. 1283-1288.
Law K.T., Lumb P. - a A limit equilibriumanalysis of progressive failure in the sta-bility of slopes >. Can adian Geotech. J.
vol. 15, 1978, p. 113-122.Lebuis J., Robert J.M., Rissmann P. -
< Regional mapping of landslides hazardin Québec >. Symp. on slopes in softclays, Linkôping, SGI Report n" 17,1983,p.205-262.
Li K.S. - a A unified solution scheme forslope stability analysis ). 6th ISL, Christ-church , 1992, p. 481-486.
T ir-rl^ A T T)-:^^ \/Tl ..'1'1^ ^ ^f ^-^ ^l^-_LrLLlU f1..t-., rtIUU V.I-. - r( llru ubtr ul dlr gruL-
tronic computer for slope stability analy-sis >. Geotechnique vol. B, 1958, p.113-120.
Lo K.Y., Morin J.-P. - a Strength aniso-tropy and time effects of two sensitiveclays >. Canadian Geotech. J. 9-3, 1972,p. 261,-277 .
Low B.K., Gilbert R.8., Wright S.G. - < Slopereliability analysis using generalizedmethod of slices ). J. Geotech Env. Eng.,ASCE, vol. 124, no 4, 1998, p. 350-362.
Lumsdaine R.W., Tang K.Y. - ( A compari-son of slope stability calculations >. Pro-ceedings of the 7th South East AsianGeotechnical Conf., Hong Kong, 1982,p. 31-38.
Magnan J.-P., Seve G., Pouget P.a Quelques spécifités de l'analyse derisque pour les ouvrages de géotech-nique >. Proc. 2nd I.S. Hard Soils-SoftRocks, Naples, vol.2,1998, p. 1109-1116.
Maranini E., Brignoli M. - cc An analyticalviscoplastic model for the creep beha-vior of a porous weak rock >. Proc. conf.Geotech. Hard Soils-Soft Rocks, Naples,1998, p. 697 -705.
15REVUE FRANçAIsE or cÉorccuNteuE
N" 993e trimestre 2000

Bibliographie
Morgenstern N.R., Price V.E. - a The analy-sis of the stability of general slip surfaces>>. Geotechnique vol. 15, 1965, p. 79.93.
Pham M. - a Écriture à l'aide de la logiquefloue des règles du système expertXPENT ). DEA ENTPE/INSA. 1994.
Raulin P., Rouques G., Toubol A. - < Calculde ia stabilité des pentes en rupture noncirculaire r. Rapport recherche no 36LCPC, 1974.
Sarma S.K. < Stability analysis ofembankments and slopes r. ASCE, . J.GED vol. 1052, GT 12, 1979, p. 1,511-1524.
Singh A.W., Mitcheli J.K. n Generalstress-strain-time function for soils l.ASCE, J. SMFD 94-1, 1968, p.21-46.
Skemton A.W. - cc Long term stability ofclay slopes ). 4th Rankine lecture. Geo-technique vol . 14, no 1, 1964. p.77-101.
Skempton A.W. - ( Slope stability of cut-tings in brown London clay r. Proc. 9thICSMFE, Tokyo, vol. 3, 1,967, p.261-270.
Stark T.D., Eid H.T. - < Performance ofthree -dimensional slope stabiiitymethods >. ASCE, J. Geot. Geoenv.Eng.vol. 124-11,1998.
Tavenas F., Leroueil S. (1981) -' Creep andfailure of slopes in clays " . Can. Geotech.J. vol. 1B-1,, p. 106-120.
Tavenas F., Leroueil S. - rc A new approachto effective stress stability analyses ).ISL 82, Linkoping, Sweden, 1982.
Tavenas F., Trak B, Leroueil S. - ( Remarkson the validity of stability anaiyses r.Can. Geotech. J. 17, 1980, p. 61-73.
Taylor D.W. < The stability of earthslopes >>. Journal. Boston societv of Civ.Eng., vol. 24, no 3, 1937 .
Ter-Stepanian G. - < Creep of a clay duringshear and it rheological model >>. Geo-technique 25, no 2, 1975, p. 299-320.
Ugai K. - < Three dimensional slope stabi-Iity analysis by slice method ). NUMOG6, Innsbruck, 1988, p. 1369-1374.
Ugal K., Leshchinsky D. - cc Three dimen-sional limit equilibrium and finite ele-ment analyses: a comparison ofresults >. Soils and Foundations vol. 35.no 4,1995, p.1-7.
Vaunat J., Leroueil S., Faure R.M. - cr Slopemovements : â geotechnical perspec-tive ). 7th IAEG congress, Lisbonne,1994, p. 1637 -1646.
Wright S.G. Kulhawy F.G., Duncan J.M. -< Accuracy of equilibrium slope stabilityanalysis ". ASCE, J. SMFD vol. 99,SM10, 1973, p.791-793.
16REVUE FRANçAISE DE GÉOTECHNIQUEN" 993e trimestre 2000


















