Proposition d'une kinésithérapie respiratoire confortée par l'équation ...
Upload
phunghuongCategory
view
223download
3
analyse des contraintes dans un taluspar la méthode des perturbations
stress analysis in a slope usinga perturbation method
R.M. FAURE
Ecole Nationale des Travaux Publics de l'Etat (E.N.T.P.E) *
RésuméL'étude présentée est composée de deux parties.
La première confirme le résultat classique suivant: toute méthode de stabilité doitvérifier l'équation de projection suivant la verticale pour être convergente et fiable.
La seconde paltie précise les paramètres à utiliser dans la méthode des perturbationsprésentée et nlontre que considérer le seul coefficient de sécurité F est insuffisantet que l'on doit se préoccuper du lobe des contraintes, afin de pouvoir étendreces méthodes vers les problèmes de clouage par exemple.
AbstractThe tollowing study consists ot two parts.
The tirst one shows the weil known result that the mechanics ot any slope stabi/ityanalysis must verity the equi/ibrum in the vertical direction in order to be reliableand to converge.
The second part indicates more precisely the parameters to be used in theperturbation method. This part shows that taking in account only the value ot thesatety tactor F to guide this choice is not satistactory. One must also consider the"stress lobe" (envelope Dt normal stresses along the tai/ure curve).
* Rue Maurice-Audin, 69120 Vaulx-en-Velin.
50
1. INTRODUCTION
L'étude présentée ici peut être décomposée en deuxgrandes parties.
La première possède un caractère académique etaboutit au résultat intuitif, que toute méthode de calculà la rupture en stabilité des pentes doit au moinsvérifier l'équation de projection sur une verticale pourêtre convergente et fournir un résultat fiable.
La seconde partie est un paramétrage systématiquedes termes intervenant dans la méthode des perturbations, qui vérifie les trois équations de la statique,afin de proposer un choix de ces paramètres. Danscette étude la solution du problème de statique n'estplus simplement le coefficient de sécurité Fs mais aussile lobe des contraintes et ce résultat, confronté à dessolutions obtenues par éléments finis, permet d'envisager des études plus délicates comme le clouage dessols ou certains aspects sismiques de la stabilité despentes (FAURE et al, 1986).
2. QUELQUES RAPPELSSUR LES MÉTHODES DE CALCULDE STABILITÉ DES PENTES
Toute méthode de calcul est basée sur des hypothèsessimplificatrices portant sur les lois qui régissent lecomportement du matériau sol et sur la gé,ométrie duproblème.
L'hypothèse principale se rapportant à la géométrieest de considérer le problème plan. Pour le comportement du solon supposera à la fois un comportementrigide de la masse en glissement, et un coefficient desécurité constant défini par F5 et la vérification de laloi de Coulomb.
2.1. Méthodes des lignes de glissement
Si la ligne est simple on sait résoudre par un simplefuniculaire des forces. C'est le cas de la méthode deCoulomb et des méthodes de blocs.
2.2. Méthodes des tranches
Le massif est décomposé en tranches verticales. Uninventaire des équations disponibles et des inconnuespermet de définir le nombre d'équations supplémentaires à ajouter au système et suivant ce choix onobtient les diverses méthodes (ex.: BISHOP, MORGENSTERN).
2.3. Méthodes globales
On suppose connaître une répartition des contraintesle long de la courbe de rupture sous une formeparamétrée. Les paramètres sont alors des inconnuesdans la méthode de résolution (ex.: BELL, perturbations... ).
REVUE FRANÇAISE DE GÉOTECHNIQUE
2.4. Méthodes variationnelles
Une énergie de déformation peut être calculée avantla rupture, sa minimisation permet d'obtenir un systèmerésolvant. Cette résolution peut être très sophistiquéecomme chez BAKER et al. (1978), mais reste encoreincomplète.
On peut donc recenser une vingtaine de méthodesbien connues pour les études de stabilité de pente.En comparant ces méthodes on remarque que sil'approche mécanique des sols est très développée,on a alors un schéma numérique peu stable et quelorsque l'on veut rendre ce schéma stable il fautsimplifier au maximum des hypothèses de la mécaniquedes sols.
Une caractéristique commune de ces méthodes estque le lobe des contraintes n'est jamais exhibé commerésultat principal et que les comparaisons ne portentque sur le coefficient de sécurité Fs.
Dans ce qui suit nous allons donner au lobe descontraintes une place prépondérante dans l'étude comparative qui conduira à un choix.
3. LA MÉTHODE DES PERTURBATIONS
C'est une méthode globale; la discrétisation qui conduit à des points de calcul que l'on appelle tranchespar abus de langage, est essentiellement numériqueafin de pouvoir calculer les intégrales.
3.1. Formulation
Cette méthode, dont le principe a été posé par RAULINet al. (1972) vérifie les trois équations de la statique.
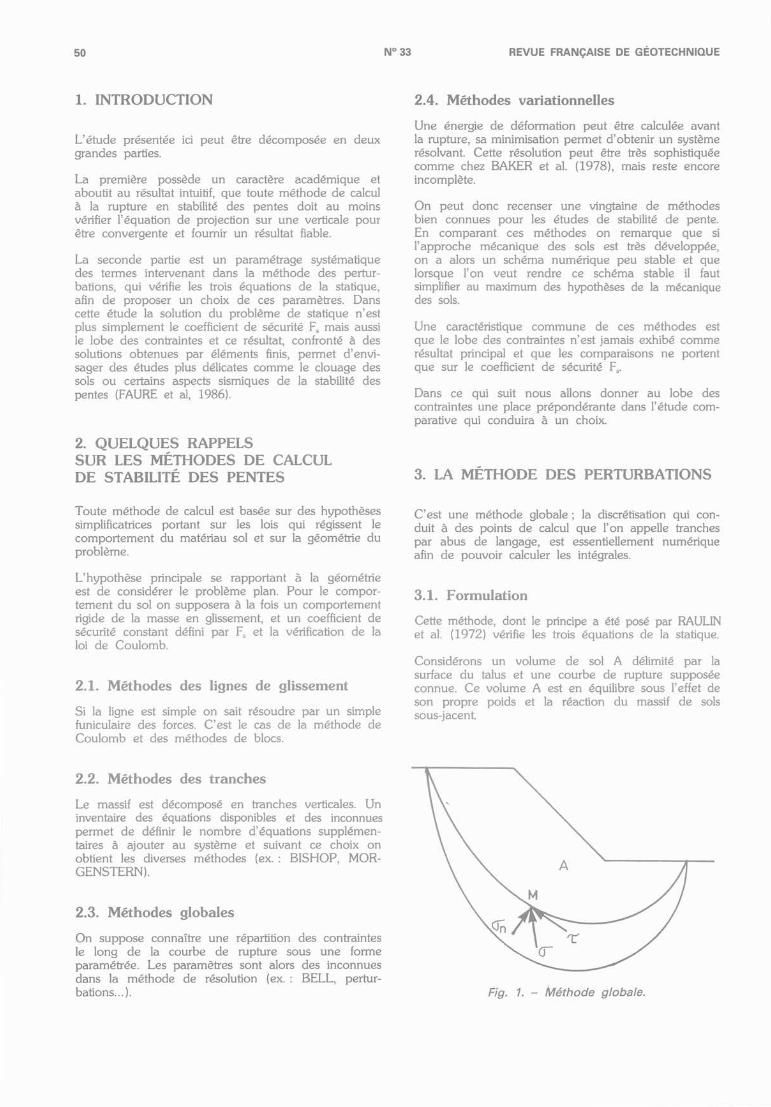
Considérons un volume de sol A délimité par lasurface du talus et une courbe de rupture supposéeconnue. Ce volume A est en équilibre sous l'effet deson propre poids et la réaction du massif de solssous-jacent.
Fig. 1. - Méthode globale.
ANALYSE DES CONTRAINTES DANS UN TALUS PAR LA MÉTHODE DES PERTURBATIONS 51
En un point M de la courbe de rupture la réactiondu sols sous-jacent peut être représentée par unvecteur contrainte noté 0... Ce vecteur contrainte 0
peut être décomposé en un vecteur normal On et unvecteur tangenciel 't à la courbe de rupture.
On appelle lobe des contraintes la courbe enveloppedes extrémités du vecteur On. Suivant l'hypothèse dela rupture nous déduirons 't de On par la loi deCoulomb et par l'application du coefficient de sécurité.
(On - u) tg<t>' + c''t==
Le lobe des contraintes normales apparaît donc commeune inconnue. Pour résoudre nous allons supposerconnue une valeur approchée de cette contrainte, soit00. Les trois équations de la statique sont les équationsrésolvantes aussi nous pouvons écrire:On == 0 0 (Â. + Jl v) où Â. et Jl sont des inconnues(au même titre que Fs ) et v un paramètre généralementgéométrique connu en tout point.
On peut alors résoudre en À, Jl et Fs à l'aide de cestrois équations de la statique. Cette résolution est unpeu délicate car Fs apparaît au dénominateur.
Dans la méthode des perturbations écrire l'équilibrede la masse A nécessite la connaissance des paramètresdu sol (loi de Coulomb), un choix des expressions0
0et v. Pour cette masse A, définie par une courbe
de rupture on obtient dans le vecteur solution lesparamètres À et Jl qui déterminent la perturbation etFs le coefficient de sécurité supposé constant le longde la courbe de rupture. Pour connaître la stabilitéd'un talus on étudiera plusieurs courbes non circulaires,générées par un algorithme dans le programme NIXESet TROLLS.
La rupture la plus probable correspond à la courbede coefficient de sécurité minimum.
Dans un but de généralisation on écrit:
[00 (À + Jlv) - u] tg<t>' + c''t == -----------
Fo·d
où d est une fonction définie le long de la courbede rupture et qui permet de faire varier le Fs local(Fs == Fo.d) tout en gardant à Fa une définition globalepour la courbe rupture.
00 est appelée contrainte initiale
v est le paramètre de perturbation
/' + JlV est la perturbation
d est le paramètre de variation du coefficient desécurité.
3.2. Choix de 00' v et d
L'étude comporte deux parties qui sont la recherchede différentes formulations des termes am v et d, puisune comparaison en vue du choix.
La formulation doit correspondre à une bonne intuitiondu résultat car tout système se résoud d'autant plusfacilement que l'on est proche de la solution. C'estainsi que l'on progressera dans la définition de 00.
Le choix des paramètres est mal aisé car il est difficilede définir de bons critères de choix. Des calculs enéléments finis seraient précieux, pour guider cé choixet cela reste une voie d'étude. Le choix proposé estguidé par des critères plus simplistes. Il sera fait auchapitre 6.
3.2.1. Choix de 00
Trois définitions, appelées modes sont proposées danscette étude.
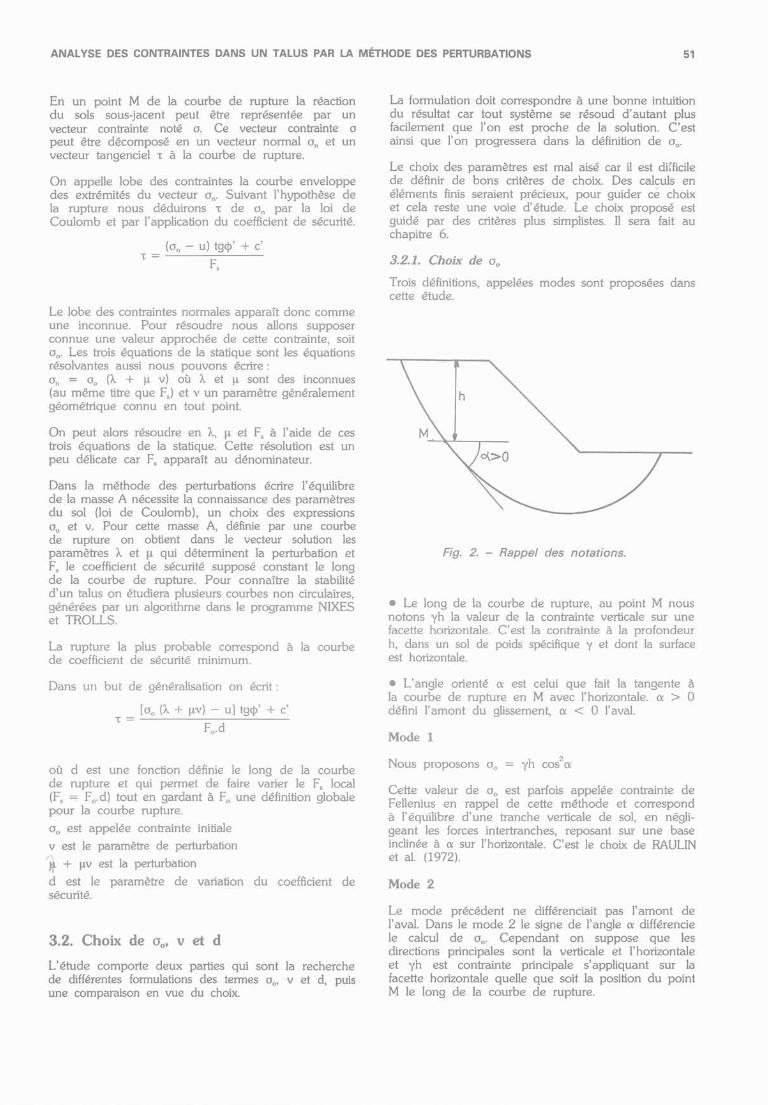
Fig. 2. - Rappel des notations.
• Le long de la courbe de rupture, au point M nousnotons yh la valeur de la contrainte verticale sur unefacette horizontale. C'est la contrainte à la profondeurh, dans un sol de poids spécifique y et dont la surfaceest horizontale.
• L'angle orienté ex est celui que fait la tangente àla courbe de rupture en M avec l'horizontale. ex > 0défini l'amont du glissement, ex < 0 l'aval.
Mode 1
Nous proposons 0 0 == yh cos2 ex
Cette valeur de 00 est parfois appelée contrainte deFellenius en rappel de cette méthode et correspondà l'équilibre d'une tranche verticale de sol, en négligeant les forces intertranches, reposant sur une baseinclinée à ex sur l'horizontale. C'est le choix de RAULINet al. (1972).
Mode 2
Le mode précédent ne différenciait pas l'amont del'aval. Dans le mode 2 le signe de l'angle ex différenciele calcul de 00. Cependant on suppose que lesdirections principales sont la verticale et l' horizontaleet yh est contrainte principale s'appliquant sur lafacette horizontale quelle que soit la position du pointM le long de la courbe de rupture.
52
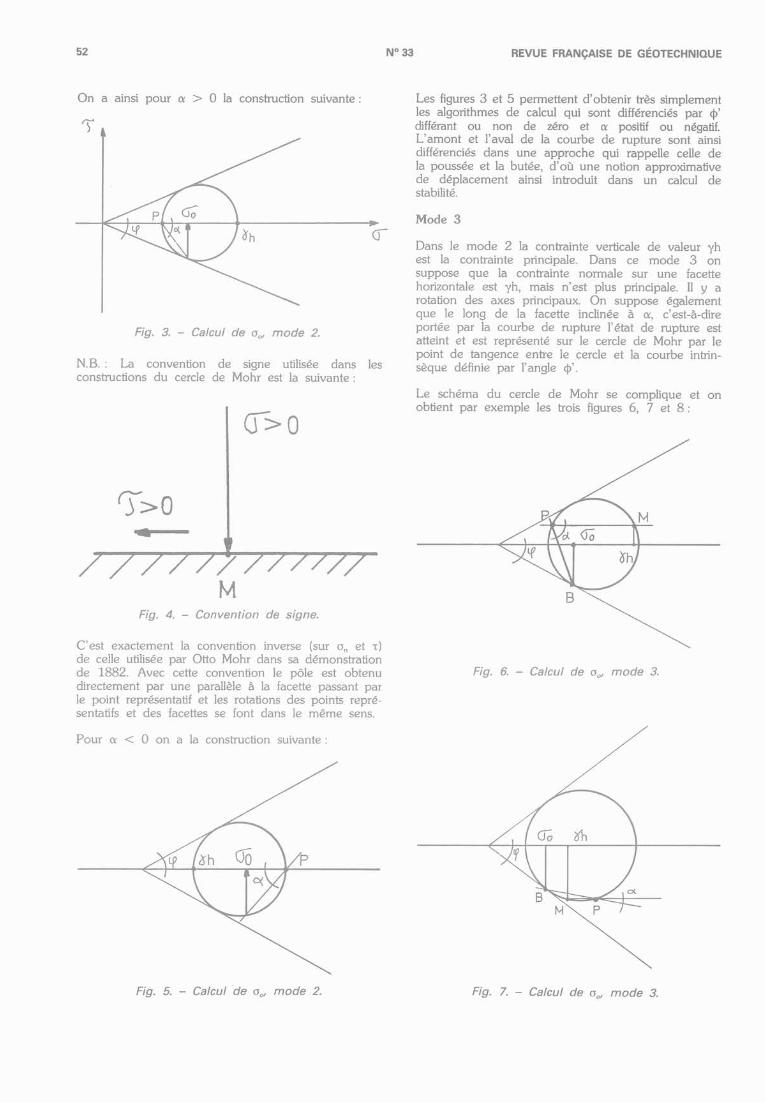
On a ainsi pour Π> 0 la construction suivante:
Fig. 3. - Calcul de 0D' mode 2.
N.B.: La convention de signe utilisée dans lesconstructions du cercle de Mohr est la suivante:
U>O
r:f>o•
Fig. 4. - Convention de signe.
C'est exactement la convention inverse (sur on et T)de celle utilisée par Otto Mohr dans sa démonstrationde 1882. Avec cette convention le pôle est obtenudirectement par une parallèle à la facette passant parle point représentatif et les rotations des points représentatifs et des facettes se font dans le même sens.
Pour Π< 0 on a la construction suivante:
Fig. 5. - Calcul -de 00' mode 2.
REVUE FRANÇAISE DE GÉOTECHNIQUE
Les figures 3 et 5 permettent d'obtenir très simplementles algorithmes de calcul qui sont différenciés par <t>'différant ou non de zéro et Œ positif ou négatif.L'amont et l'aval de la courbe de rupture sont ainsidifférenciés dans une approche qui rappelle celle dela poussée et la butée, d'où une notion approximativede déplacement ainsi introduit dans un calcul destabilité.
Mode 3
Dans le mode 2 la contrainte verticale de valeur yhest la contrainte principale. Dans ce mode 3 onsuppose que la contrainte normale sur une facettehorizontale est yh, mais n'est plus principale. Il y arotation des axes principaux. On suppose égalementque le long de la facette inclinée à Œ, c'est-à-direportée par la courbe de rupture l'état de rupture estatteint et est représenté sur le cercle de Mohr par lepoint de tangence entre le cercle et la courbe intrinsèque définie par l'angle <t>'.
Le schéma du cercle de Mohr se complique et onobtient par exemple les trois figures 6, 7 et 8:
Fig. 6. - Calcul de 00' mode 3.
Fig. 7. - Calcul de 00' mode 3.
ANALYSE DES CONTRAINTES DANS UN TALUS PAR LA MÉTHODE DES PERTURBATIONS 53
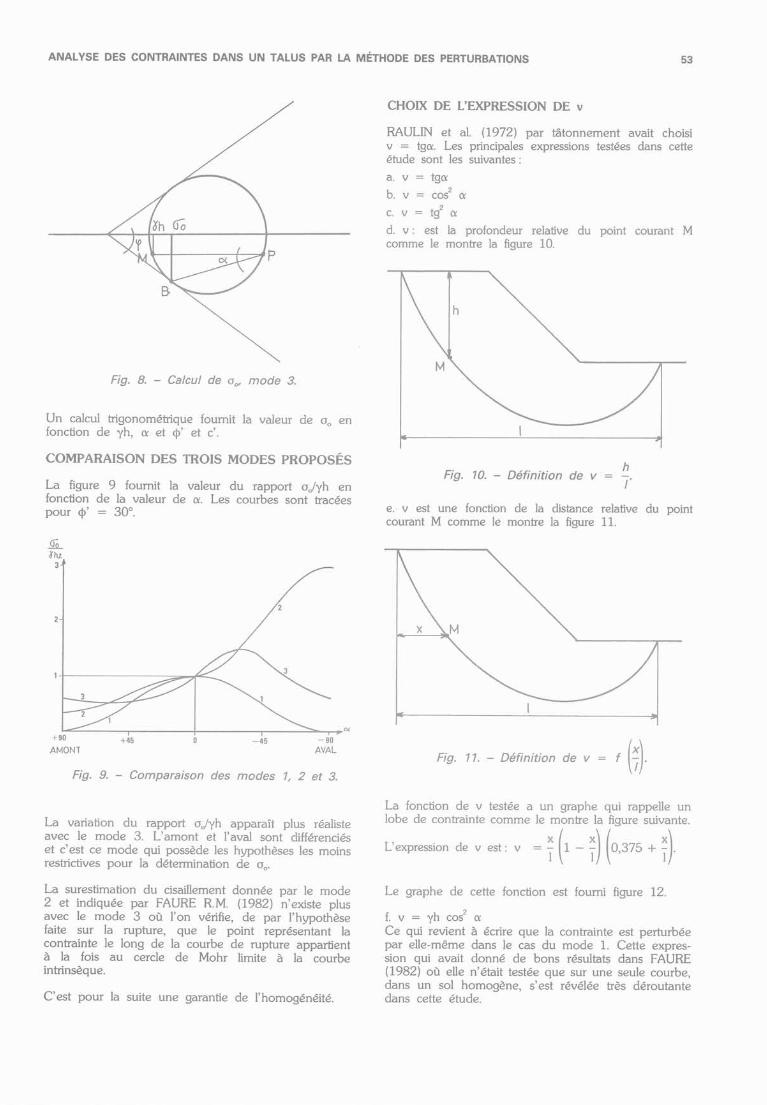
CHOIX DE L'EXPRESSION DE v
Fig. 8. - Calcul de 0o' mode 3.
RAULIN et al. (1972) par tâtonnement avait choisiv = tgœ. Les principales expressions testées dans cetteétude sont les suivantes:
a. v = tgœ
b. v = cos2 œ
c. v = tg2 œ
d. v: est la profondeur relative du point courant Mcomme le montre la figure 10.
Un calcul trigonométrique fournit la valeur de 00
enfonction de yh, œ et <t>' et c'.
COMPARAISON DES TROIS MODES PROPOSÉS
La figure 9 fournit la valeur du rapport ojyh enfonction de la valeur de œ. Les courbes sont tracéespour <t>' == 30°.
hFig. 10. - Définition de v = "
e.· v est une fonction de la distance relative du pointcourant M comme le montre la figure Il.
x M
.......:::~-----r------4-----..,...-----..;;::__~O<+90
AMONT+45 -45 -90
AVALFig. 11. - Définition de v
Fig. 9. - Comparaison des modes 1, 2 et 3.
La variation du rapport ojyh apparaît plus réalisteavec le mode 3. L'amont et l'aval sont différenciéset c'est ce mode qui possède les hypothèses les moinsrestrictives pour la détermination de 0
0,
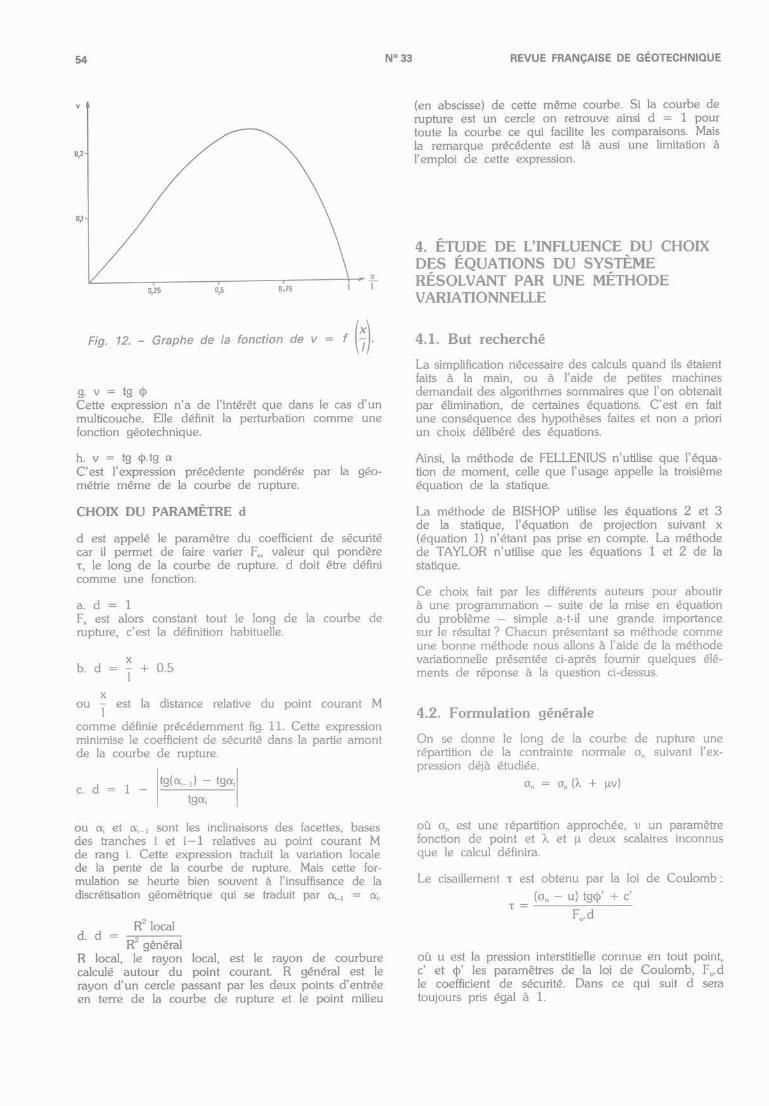
La fonction de v testée a un graphe qui rappelle unlobe de contrainte comme le montre la figure suivante.
L'expression de v est: v = T(1 - T) (0,375 + T)·
La surestimation du cisaillement donnée par le mode2 et indiquée par FAURE R.M. (1982) n'existe plusavec le mode 3 où l'on vérifie, de par l'hypothèsefaite sur la rupture, que le point représentant lacontrainte le long de la courbe de rupture appartientà la fois au cercle de Mohr limite à la courbeintrinsèque.
C'est pour la suite une garantie de l'homogénéité.
Le graphe de cette fonction est fourni figure 12.
f. v = yh cos2 œCe qui revient à écrire que la contrainte est perturbéepar elle-même dans le cas du mode 1. Cette expression qui avait donné de bons résultats dans FAURE(1982) où elle n'était testée que sur une seule courbe,dans un sol homogène, s'est révélée très déroutantedans cette étude.
54
v
0,2
0,1
1L----~----..,.-------,------r~T[),25 0,5 0,75
Fig. 12. - Graphe de la fonction de v
g.v==tg<pCette expression n'a de l'intérêt que dans le cas d'unmulticouche. Elle définit la perturbation comme unefonction géotechnique.
h. v == tg <p. tg (X
C'est l'expression précédente pondérée par la géométrie même de la courbe de rupture.
CHOIX DU PARAMÈTRE d
d est appelé le paramètre du coefficient de sécuritécar il permet de faire varier Fs, valeur qui pondère't, le long de la courbe de rupture. d doit être définicomme une fonction.
a. d == 1Fs est alors constant tout le long de la courbe derupture, c'est la définition habituelle.
xb. d == - + 0.5
xou 1 est la distance relative du point courant M
comme définie précédemment fig. Il. Cette expressionminimise le coefficient de sécurité dans la partie amontde la courbe de rupture.
I
t9(CXi- 1 ) - tgCXilc. d == 1 -
tgcxi
ou CXi et CXi - 1 sont les inclinaisons des facettes, basesdes tranches i et i-1 relatives au point courant Mde rang i. Cette expression traduit la variation localede la pente de la courbe de rupture. Mais cette formulation se heurte bien souvent à l'insuffisance de ladiscrétisation géométrique qui se traduit par (X~l == (Xi.
R2 locald. d == ---
R2 généralR local, le rayon local, est le rayon de courburecalculé autour du point courant. R général est lerayon d'un cercle passant par les deux points d'entréeen terre de la courbe de rupture et le point milieu
REVUE FRANÇAISE DE GÉOTECHNIQUE
(en abscisse) de cette même courbe. Si la courbe derupture est un cercle on retrouve ainsi d == 1 pourtoute la courbe ce qui facilite les comparaisons. Maisla remarque précédente est là ausi une limitation àl'emploi de cette expression.
4. ÉTUDE DE L'INFLUENCE DU CHOIXDES ÉQUATIONS DU SYSTÈMERÉSOLVANT PAR UNE MÉTHODEVARIATIONNELLE
4.1. But recherché
La simplification nécessaire des calculs quand ils étaientfaits à la main, ou à l'aide de petites machinesdemandait des algorithmes sommaires que l'on obtenaitpar élimination, de certaines équations. C'est en faitune conséquence des hypothèses faites et non a prioriun choix délibéré des équations.
Ainsi, la méthode de FELLENIUS n'utilise que l'équation de moment, celle que l'usage appelle la troisièmeéquation de la statique.
La méthode de BISHOP utilise les équations 2 et 3de la statique, l'équation de projection suivant x(équation 1) n'étant pas prise en compte. La méthodede TAYLOR n'utilise que les équations 1 et 2 de lastatique.
Ce choix fait par les différents auteurs pour aboutirà une programmation - suite de la mise en équationdu problème - simple a-t-il une grande importancesur le résultat? Chacun présentant sa méthode commeune bonne méthode nous allons à l'aide de la méthodevariationnelle présentée ci-après fournir quelques éléments de réponse à la question ci-dessus.
4.2. Formulation générale
On se donne le long de la courbe de rupture unerépartition de la contrainte normale On suivant l'expression déjà étudiée.
On == 00 (À + llV)
où 00 est une répartition approchée, 1) un paramètrefonction de point et À et II deux scalaires inconnusque le calcul définira.
Le cisaillement 't est obtenu par la loi de Coulomb:
(on - u) tg4>' + c'T==
Fo.d
où u est la pression interstitielle connue en tout point,c' et 4>' les paramètres de la loi de Coulomb, Fo.dle coefficient de sécurité. Dans ce qui suit d seratoujours pris égal à 1.

ANALYSE DES CONTRAINTES DANS UN TALUS PAR LA MÉTHODE DES PERTURBATIONS 55
Dans un petit volume dV j autour du point M courantde la courbe de rupture une expression de l'énergieélastique peut être donnée par:
2 2
EN. == On + L dV.1 E 1
où E est le module d'élasticité du sol autour du pointM.
Pour pouvoir utiliser cette formulation on supposeraun déplacement global, élastique avant la rupture.
En considérant un calcul plan, donc un sol d'épaisseurd~
unité, on peut écrire dV j == e j ds. 1 == e· --1 1 cos (Xj
e j est l'épaisseur de sol intéressé comptée perpendiculairement à la courbe de rupture, dans le plan derupture comme le montre la figure 13.
Fig. 13. - Notations.
Pour calculer ENj, il faut connaître E et e j • Commele calcul porte sur la mînimisation de L EN j , E peut
être défini à un facteur multiplicatif près et e j serapris égal à 1 dans ce qui suit. Moduler E en fonctionde paramètres géotechniques pourrait être une étudeintéressante, d'une mise en œuvre aisée avec l'outildéveloppé, mais qui n'a pas été abordée dans lecadre de cet article. En gardant e j == 1 pour tout i,il suffit donc de connaître pour un multicouche lerapport des modules entre les divers sols. Le programme de calcul qui permet la distinction des différents modules de sols n'a pas été utilisé avec cettepossibilité puisque dans cette étude qui porte sur le
choix des équations résolvantes tous les modules ontété donnés égaux.
Les paramètres externes étant ainsi définis l'expressionde l'énergie élastique le long de la courbe de ruptureest une fonction de Fs, À et ~.
Pour résoudre on se servira de:
- l'expression de l'énergie minimale, donc une équation différentielle,
- et de deux, parmi les trois équations de la statique.
Ce problème classique de minimisation sous contraintese résoud en introduisant les multiplicateurs deLagrange.
Suivant le choix des deux équations de la statiqueon obtient trois calculs notés FOR 12, FOR 13, FOR 23rappelant les équations utilisées. Le développementcomplet des calculs est dans l'ouvrage de Faure(1982). Avant de présenter les résultats de cette étuderappelons sa mise en œuvre.
5. MISE EN ŒUVRE
La mise en œuvre de cette étude est faite à l'aidedu programme NIXES et TROLLS, FAURE (1974)dans sa plus récente version (FAURE, 1983). Leparamétrage des modes, présentés au paragraphe 3.2(mode 1, 2 et 3), le choix de v (1 à 8) et le choixde d (1 à 4) et le choix des méthodes Perturbations- FOR 12 - FOR 13 - FOR 23 - font que ceprogramme dispose en non circulaire de 384 méthodesauxquelles il faut rajouter la méthode de Bishopmodifiée LPC en rupture circulaire.
Le programme peut combiner les différents choix pouréviter à l'utilisateur la définition de chacune desméthodes, ceci pour une rupture non circulaire seulement.
Des sorties graphiques permettent d'obtenir les différents lobes des contraintes pour des comparaisonsplus pertinentes.
Le niveau de dialogue de ce programme est trèsélevé, l'expérience de visualisation interactive faite avecVESTAL (FAURE et al. (1975)), a été intégrée dansun mode conversationnel agréable et cet outil estparfaitement adapté à toute étude de cas. Une extension intégrant les possibilités de clouage des sols estdéjà opérationnelle (Faure et al. (1985)). C'est à lafois un outil de recherche et un outil d'étudesparticulières.
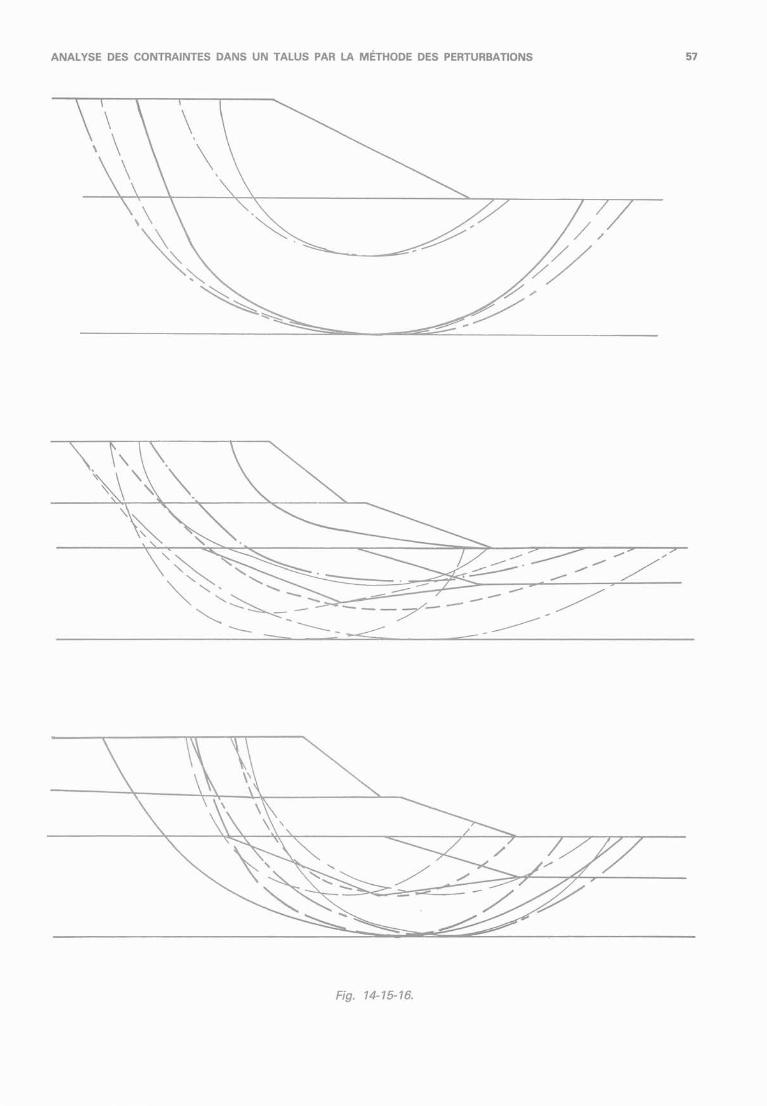
Pour l'étude présente, deux talus ont été étudiés. Lesfigures 14, 15 et 16 en précisent la géométrie ainsique celle des courbes circulaires et non circulairesétudiées. Il y a 19 courbes ainsi définies.
Toutes les méthodes de calcul n'ont pas été testéessur toutes les courbes et tous les lobes de contraintedessinés, mais environ la 000 calculs ont été faits etprès de 1 000 lobes dessinés.
56
6. RÉSULTATS
Ils sont de deux sortes:
• Evaluation du meilleur choix des équations de lastatique dans une méthode simplifiée. Cette évaluationpeut apparaître inutile, les méthodes actuelles, grâceau calcul numérique et à l'ordinateur, vérifiant lestrois équations de la statique, mais elle garde unevaleur historique et confirme, le jugement donné parl'expérience sur les méthodes classiques.
• Choix des expressions de 00' v et d, quand lestrois équations de la statique sont vérifiées. C'est lepoint de départ du développement des perturbationsvers les algorithmes formulant de nouvelles approchescomme celles prenant en compte le clouage des solsou certaines conditions sismiques.
6.1. Choix des équations de la statique
L'étude faite ici utilise un calcul variationnel pourcomparer les choix possibles des équations nécessaires.Les résultats obtenus sont plus qualificatifs que quantitatifs. La remarque de LUCENO et CASTILLO (1981)sur la formulation incomplète du problème variationnel dans une forme bien plus développée qu'ici - confirmeque les minima obtenus ne sont pas des minima absolus.
Les constatations suivantes ont été faites.
• Des méthodes différentes peuvent fournir des coefficients Fs semblables bien que les lobes de contraitnessoient très différents (et même certaines méthodes apriori acceptables ne donnent que des contraintesnégatives). De cette remarque nous avons conclu quepour choisir une méthode le lobe des contraintes doitêtre exhibé et être un critère de choix.
• Trop de contraintes numériques se traduisant pardes tests - par exemple remettre les contraintesnégatives à zéro - conduisent à une programmationlourde et peu efficace et induisent des risques d'erreur.Dans la littérature ces problèmes sont évoqués sousle nom de convergence ce qui est impropre. Dans laméthode de Bishop, revue par le L.C.P.C., on éviteà la contrainte de devenir infinie et on sait que lesintégrales de la méthode de MORGENSTERN etPRICE doivent être lipchiziennes. Pour cette dernièreméthode, FREDLUND et KRHAN (1979) proposentune autre approche plus stable.
On rejettera donc toute méthode comportant deslimitations de certains de ses paramètres au cours descalculs.
La première remarque conduit à rejeter toute méthodebasée sur les équations 1 et 3 de la statique, leslobes obtenus présentant une large partie de contraintes négatives. Cela peut s'expliquer par le fait que lepoids des terres, principal moteur d'une rupture, n'estplus pris en compte de façon directe.
Pour les méthodes basées sur les équations 1 et 2
REVUE FRANÇAISE DE GÉOTECHNIQUE
ou 1 et 3 de la statique, leur stabilité n'est pasassurée vis-à-vis du choix de v, et a un degré moindrede 00.
Différents couples 00 et v peuvent conduire à desrésultats semblables, particulièrement pour le coefficientde sécurité Fs, un peu moins pour le lobe descontraintes.
Ce choix du couple 00' v, correspond à différentesméthodes proposées et par exemple pour les équations1-2 mode == 1, v == tgex est équivalent à mode == 2et v == cos2 ex, alors que pour les équations 2-3,v == yh cos2 ex conduit à ces mêmes résultats quel quesoit le mode.
En conclusion le choix - pour une méthode simplifiée- de deux équations de la statique au lieu de troisdoit comporter l'équation deux, mais l'efficacité de laméthode dépend aussi d'hypothèses faites pour l'approximation de la contrainte. Cela confirme que l'onpuisse utiliser les méthodes de TAYLOR et de BISHOPpar exemple.
6.2. Choix des paramètres
On a vu qu'avec un nombre limité d'équations onpeut trouver des méthodes conduisant à un résultatacceptable moyennant un choix judicieux d'un couplemode et expression de v.
DUCAN et WRIGHT (1981) affirment que toutes lesméthodes vérifiant les trois équations de la statiquesont équivalentes à 5 % près sur le coefficient desécurité Fs. Avec v == tgq>, dans la méthode desperturbations nous avons trouvé des coefficients desécurité anormalement élevés, alors que cette méthodeapparaît stable pour les différents modes ou autresexpressions de v testées.
Le choix pour 00 est le mode 3. C'est le plus completcar la seule hypothèse faite correspond à dire que lacontrainte normale, mais pas forcément principale, surune facette horizontale a pour valeur yh. Ce choixest confirmé par l'observation de la forme du lobedes contraintes qui rappelle celles que l'on trouvedans la littérature dans des études à partir desméthodes de type éléments finis. Une comparaisonfaite par J.P. RAJOT à l'Université de Berkeley aindiqué de plus une bonne correspondance des coefficients de sécurité.
Un critère qui sert aussi pour le choix de v estl'observation des valeurs que À et f.l peuvent prendre.La méthode idéale serait celle où nous aurionsÀ == 1, f.l == 0, ce qui traduit une perturbationminimale donc un bon choix de 00. En fait pour lemode 3 de 0m f.l reste «petit» et de ce fait le choixde 1) n'est pas fondamental.
Cependant la stabilité de l'expression 1) == tgex àtravers toutes les méthodes testées conduit à proposerce choix.
ANALYSE DES CONTRAINTES DANS UN TALUS PAR LA MÉTHODE DES PERTURBATIONS 57
Fig. 14-15-16.
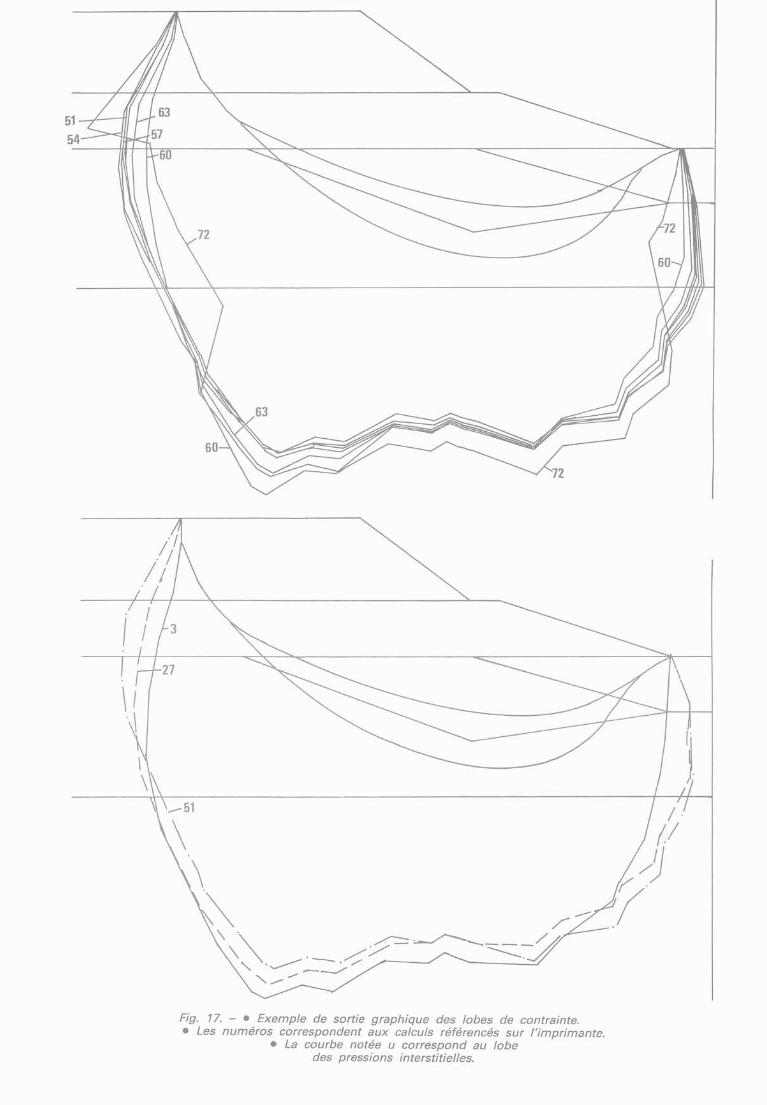
Fig. 17. - • Exemple de sortie graphique des lobes de contrainte.• Les numéros correspondent aux calculs référencés sur l'imprimante.
• La courbe notée u correspond au lobedes pressions interstitielles.

ANALYSE DES CONTRAINTES DANS UN TALUS PAR LA MÉTHODE DES PERTURBATIONS 59
RÉSUMÉ DU PROCESSUS DE CHOIX
On a:
• 4 méthodes notées 12 - 13 - 23 - 123
• 3 modes 00 notés 1, 2, 3• 8 expressions de v
• 4 expressions de d.
Etape 1Le choix de d est d == 1 car les trois autres expressionsn'ont pas fourni de résultats interprétables.
Etape 2L'obtention de lobes de contraintes négatives conduità éliminer la méthode 13.
Etape 3• La méthode 12 ne donne des résultats acceptablesque pour les couples:- mode 1, v == tgex
x- mode == 2 v = -, h
• La méthode 23 ne donne des résultats acceptables
que pour v = T(1 - T) (0,375 T)
On ne retiendra les méthodes 12 et 23 que pour deschoix particuliers des paramètres.
Etape 4La méthode 123 est très stable par rapport à v saufpour v = yh cos2 ex.
Pour le mode 3, À est VOISIn de 1, l-! très petit envaleur absolue et v tgex fournit le lobe des contraintesle plus régulier.
A ce stade le choix est donc 00 suivant le mode 3,v = tgex et d = 1.
Les extensions du programme NIXES et TROLLSsont faites avec ces expressions.
7. CONCLUSION
Cette étude a montré que pour un coefficient desécurité acceptable, on peut obtenir un lobe decontrainte aberrant. Le lobe de contrainte doit êtreun élément du choix d'une méthode de calcul à larupture car ces dernières se développent vers desapplications comme l'étude des systèmes de confortation et posséder un bon état initial permettra demieux juger l'influence du dispositif.
La méthode variationnelle présentée a montré que lesapproches simplifiées peuvent conduire à des résultatscorrects, et la méthode des perturbations, sa grandesouplesse à s'adapter à des concepts nouveaux commele choix du mode 3 pour la valeur de 00' Lesvariations envisagées avec le paramètre d n'ont pasdonné de résultats probants, les comparaisons étantdélicates.
REMERCIEMENTS
L'auteur tient à exprimer ses remerciements à la DivisionGestion et Télématique du C.E.T.E. de Lyon qui afinancé ces calculs et à M. LARE Kamba, ingénieur desTravaux Publics du Togo pour l'aide qu'il lui a, apportéedans la comparaison et le choix des méthodes.
Le programme NIXES et TROLLS qui possède tous ces rIalgorithmes automatisés devrait connaître un grand déve- ~loppement. (')
BIBLIOGRAPHIE
BAKER R., GARBER M. - Theorical analysis of slopes,Géotechnique 28, na 4, 1978.
DUNCAN J.M., WRIGHT S.G., - The accuracy of theequilibrium methods of slope stability analysis. Proc. int.symp. ou Landslides - 1982 - New Delhi. Vol. 1, pp.247-254.FAURE R.M., MOUROUX P., RAJOT J.P., - Prise encompte des actions sismiques dans un programme destabilité de pentes. Actes du colloque de Génie Parasismique Paris - Janvier 1986.FAURE R.M., MOREAU F., GAURIAT P., GUENIOT
Y. - Application de la visualisation interactiveaux calculs de stabilité de pentes: le programmeVESTAL, Bull L.P.C., na 78, 08-1975.
FAURE R.M., MAGNAN J.P., MOREAU M., PILOTG. - Calcul sur ordinateur des ouvrages en terre.Revue Générale des Routes et Aérodromesna 523, 09-1976.
FAURE R.M. - Outils numériques en Mécanique desSols, application aux stabilités de pentes. Thèseprésentée à Paris VI, mars 1982.
FAURE R.M., RAJOT J.P. - Le système NIXES etTROLLS. Doc. E.N.T.P.E., 1985.
FREDLUNG D.G., KRAHN J. - Comparaison of slopesstability methods of analysis. Canadian Geotechnical Journal vol. 14.3, 08-1977.
CASTILLO E., LUCENO A. - A critical analysis ofsome variational methods in slope stability analysis. Int. Jour. for Num. and An. Meth. InGeomechanics 6,2, 195-209, 1982.
RAULIN P., ROUQUES G., TOUBOL A. - Calcul dela stabilité des pentes en rupture non circulaire.Rapport de recherche L.P.C., na 36, 06-1974.