Modélisation de la détérioration basée sur les données...
37
Modélisation de la détérioration basée sur les données de surveillance conditionnelle et estimation de la durée de vie résiduelle T. T. Le , C. Bérenguer, F. Chatelain Univ. Grenoble Alpes, GIPSA-lab, F-38000 Grenoble, France CNRS, GIPSA-lab, F-38000 Grenoble, France Journées de l’Automatique GdR MACS
Transcript of Modélisation de la détérioration basée sur les données...

Modélisation de la détérioration basée sur les
données de surveillance conditionnelle et
estimation de la durée de vie résiduelle
T. T. Le , C. Bérenguer, F. Chatelain
Univ. Grenoble Alpes, GIPSA-lab, F-38000 Grenoble, France
CNRS, GIPSA-lab, F-38000 Grenoble, France
Journées de l’Automatique GdR MACS

Context
FP7 European project:
• “SUstainable PREdictive Maintenance for manufacturing Equipment”
• Purpose: Development of new tools for predictive maintenance to improve
productivity, reduce machine downtimes and increase energy efficiency.
⇒ Application case: Paper machine
⇒ Main objectives:
� Deterioration modeling
� Remaining Useful Life (RUL)
estimation
11/12/2015 Journées de l’Automatique GdR MACS 2
Predictive maintenanceSUPREME partners

Journées de l’Automatique GdR MACS
Problem statement
Deterioration models
• Represent temporal evolution of defects, i.e. of health indicators.
• Health indicators: unobservable
• Observations: noisy condition monitoring data
=> State-space representation
• Two type of states
– Continuous
– Discrete
11/12/2015 3
1 ) : Hidden state( ,
( , ) : Observati
s
onst
t
t t
t t
xx f
y g x
ων
−= =
Discrete-state modelingContinuous-state modeling
Problem statement
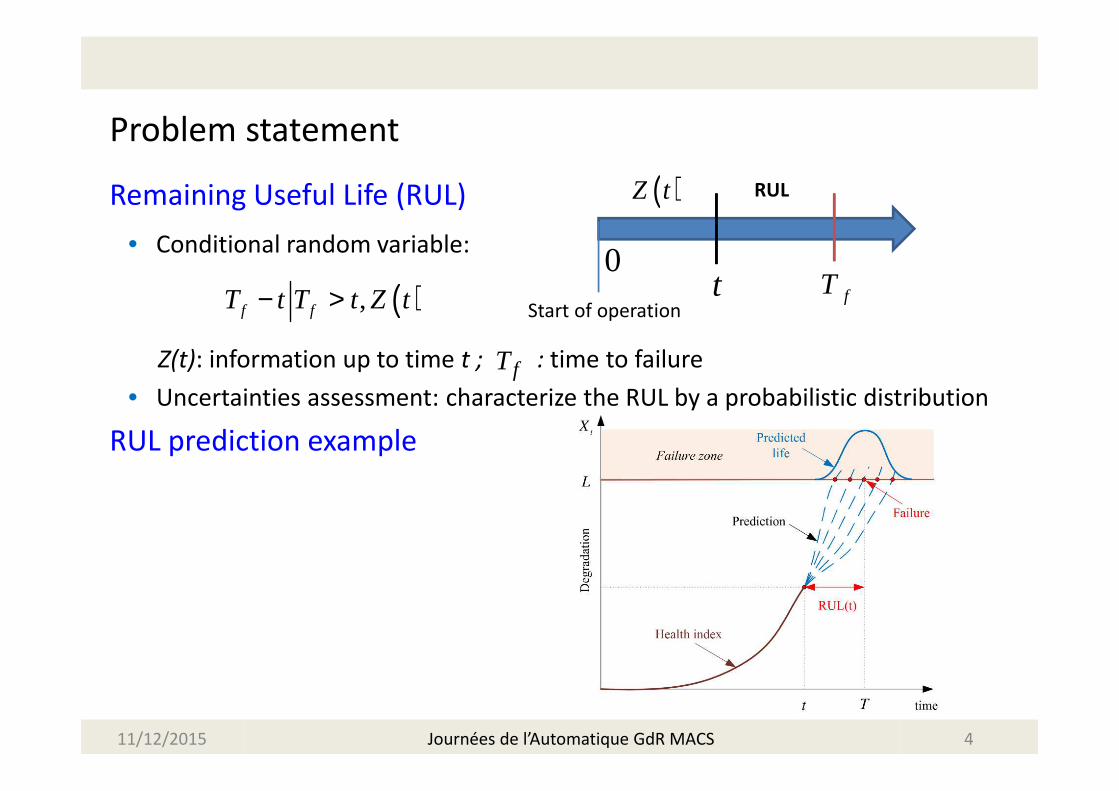
Remaining Useful Life (RUL)
• Conditional random variable:
Z(t): information up to time t ; : time to failure
• Uncertainties assessment: characterize the RUL by a probabilistic distribution
RUL prediction example
11/12/2015 4
fTtStart of operation
0
( )Z t RUL
( ),f fT t T t Z t− >
Journées de l’Automatique GdR MACS
fT
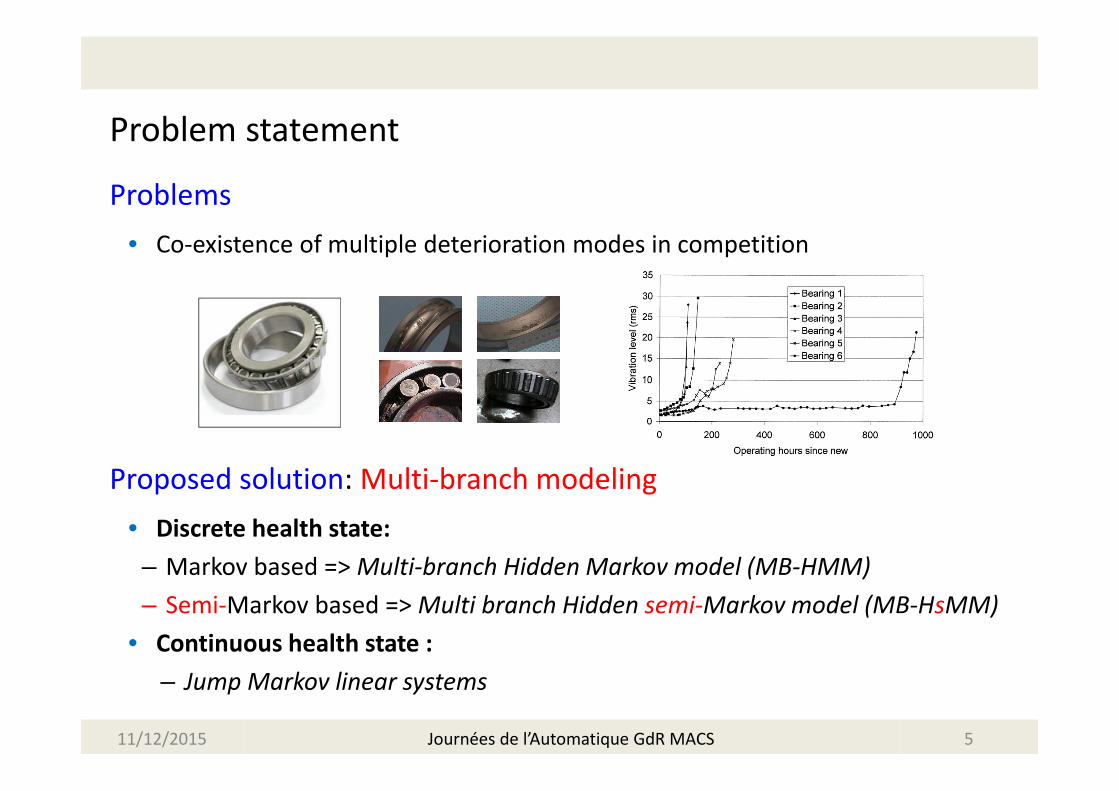
Problem statement
Problems
• Co-existence of multiple deterioration modes in competition
Proposed solution: Multi-branch modeling
• Discrete health state:
– Markov based => Multi-branch Hidden Markov model (MB-HMM)
– Semi-Markov based => Multi branch Hidden semi-Markov model (MB-HsMM)
• Continuous health state :
– Jump Markov linear systems
11/12/2015 5Journées de l’Automatique GdR MACS

Outline
� Multi-branch discrete-state model
� Diagnostics and Prognostics framework
� Numerical studies
� Jump Markov linear systems
� Parameters learning
� Health assessment and RUL estimation
� Numerical study
� Conclusion & Perspectives
11/12/2015 6Journées de l’Automatique GdR MACS

Multi-branch discrete-state models
11/12/2015 7Journées de l’Automatique GdR MACS
Multi-branch discrete-state modeling
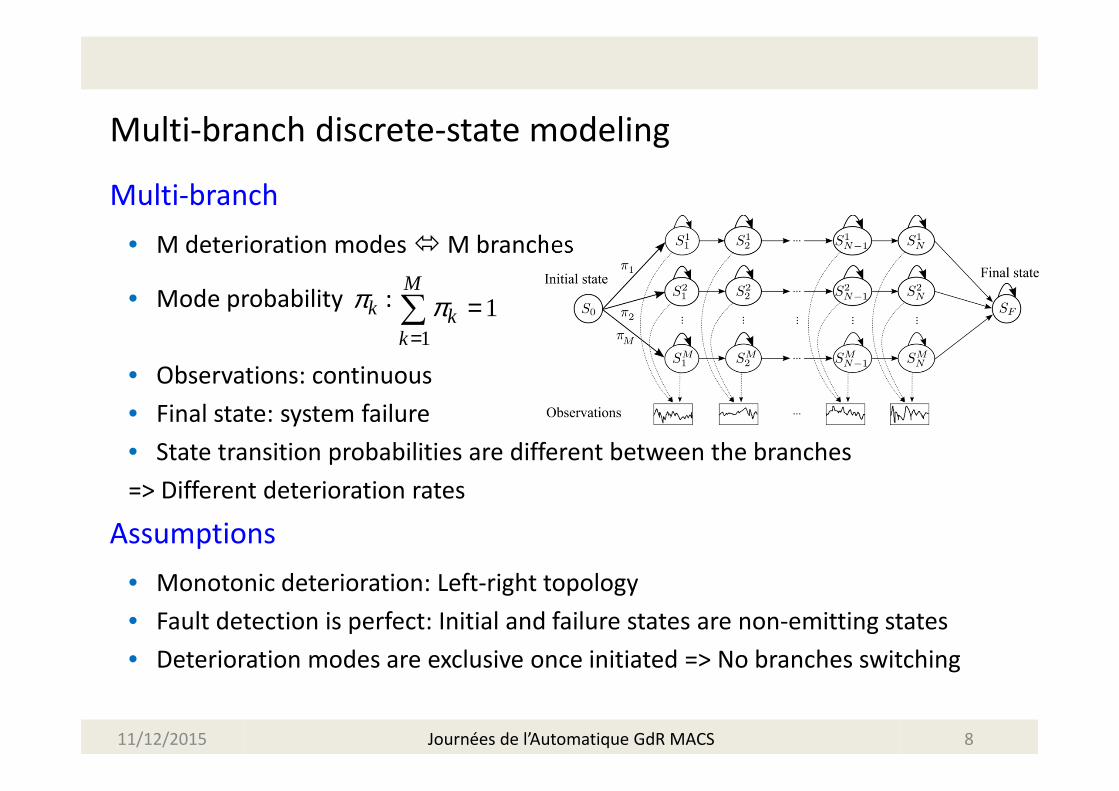
Multi-branch
• M deterioration modes � M branches
• Mode probability :
• Observations: continuous
• Final state: system failure
• State transition probabilities are different between the branches
=> Different deterioration rates
Assumptions
• Monotonic deterioration: Left-right topology
• Fault detection is perfect: Initial and failure states are non-emitting states
• Deterioration modes are exclusive once initiated => No branches switching
11/12/2015 8
1
1M
kk
π=
=∑kπ
Journées de l’Automatique GdR MACS
Multi-branch discrete-state modeling
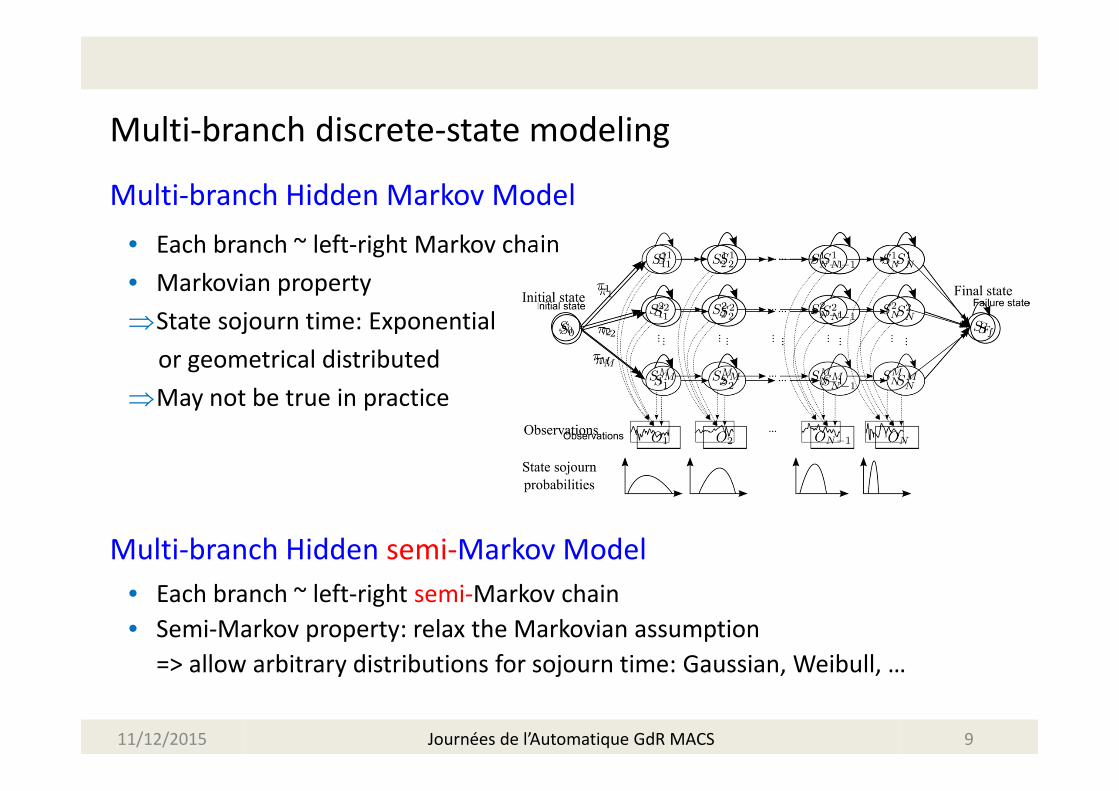
Multi-branch Hidden Markov Model
• Each branch ~ left-right Markov chain
• Markovian property
⇒State sojourn time: Exponential
or geometrical distributed
⇒May not be true in practice
Multi-branch Hidden semi-Markov Model
• Each branch ~ left-right semi-Markov chain
• Semi-Markov property: relax the Markovian assumption
=> allow arbitrary distributions for sojourn time: Gaussian, Weibull, …
11/12/2015 9Journées de l’Automatique GdR MACS

Diagnostics and prognostics framework
Two-phase implementation: offline & online
11/12/2015 10Journées de l’Automatique GdR MACS
Off-line phase
Model training
• Training data: High-level features extracted from condition monitoring data
• Topology selection: BIC criterion
• Data classification => M groups
• Each group is used to train a constituent branch:
– MB-HMM: Adaption of the Baum-Welch algorithm
– MB-HsMM: Adaption of the Forward-Backward procedure [Yu 2006]
• A priori mode probabilities
is the number of training sequences corresponding to the mode k
11/12/2015 11
( ) / , 1k k kP K K k Mπ λ= = = K
kK*[Yu06]: Practical implementation of an efficient forward-backward algorithm for an explicit-duration hidden Markov model. IEEE Transactions
on Signal Processing, 54(5), 1947-1951.
Journées de l’Automatique GdR MACS
On-line phase
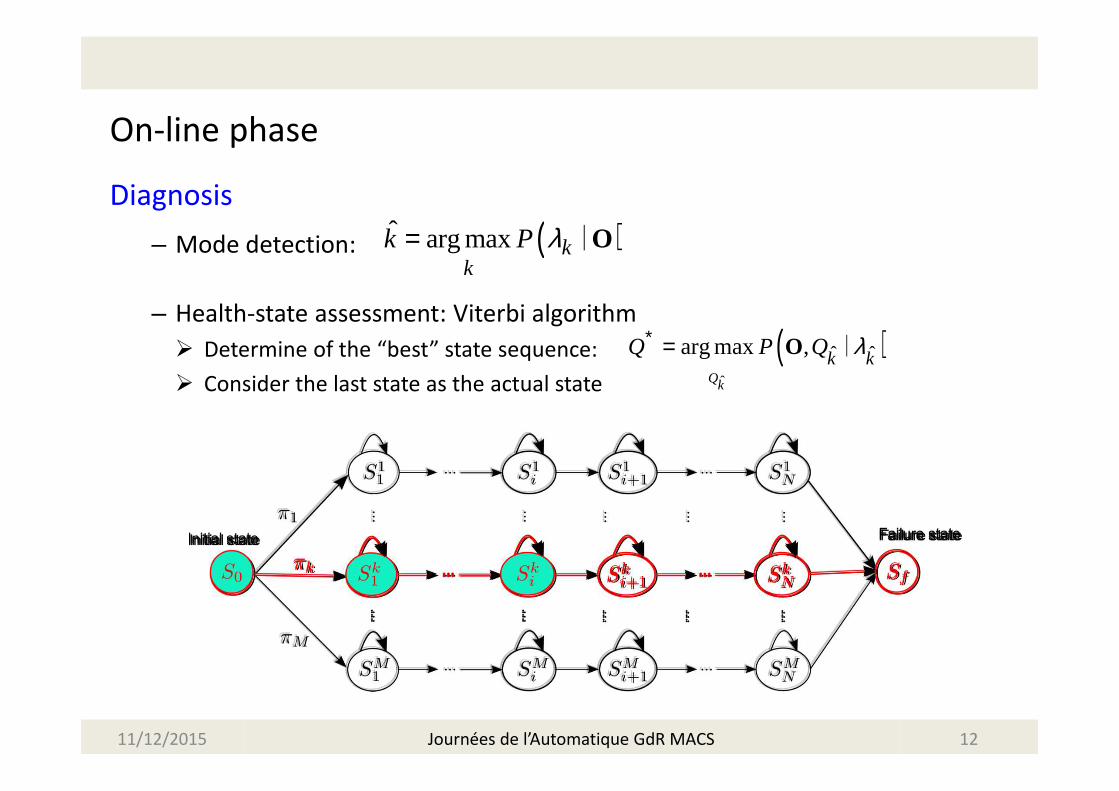
Diagnosis
– Mode detection:
– Health-state assessment: Viterbi algorithm
� Determine of the “best” state sequence:
� Consider the last state as the actual state
( )ˆ arg max kk
k P λ= O∣
( )ˆ
ˆ ˆarg max ,Qk
k kQ P Q λ∗ = O ∣
11/12/2015 12Journées de l’Automatique GdR MACS

RUL estimation
One branch (HMM case)
• Suppose that the system is following the mode k
• RUL : discrete time assumption => number of transition steps to reach for the
1st time the failure state:
• Left-right HMM: Given the current state, the system can either stay in the
same state or jump to the next one
⇒ Recursive computation
( ) ( )( )1 1, , ,l
t i t l N t l N t N t iiRUL P RUL l q S P q S q S q S q S+ + − += = = ≠ …= = ≠ =∣ ∣
11/12/2015 13Journées de l’Automatique GdR MACS
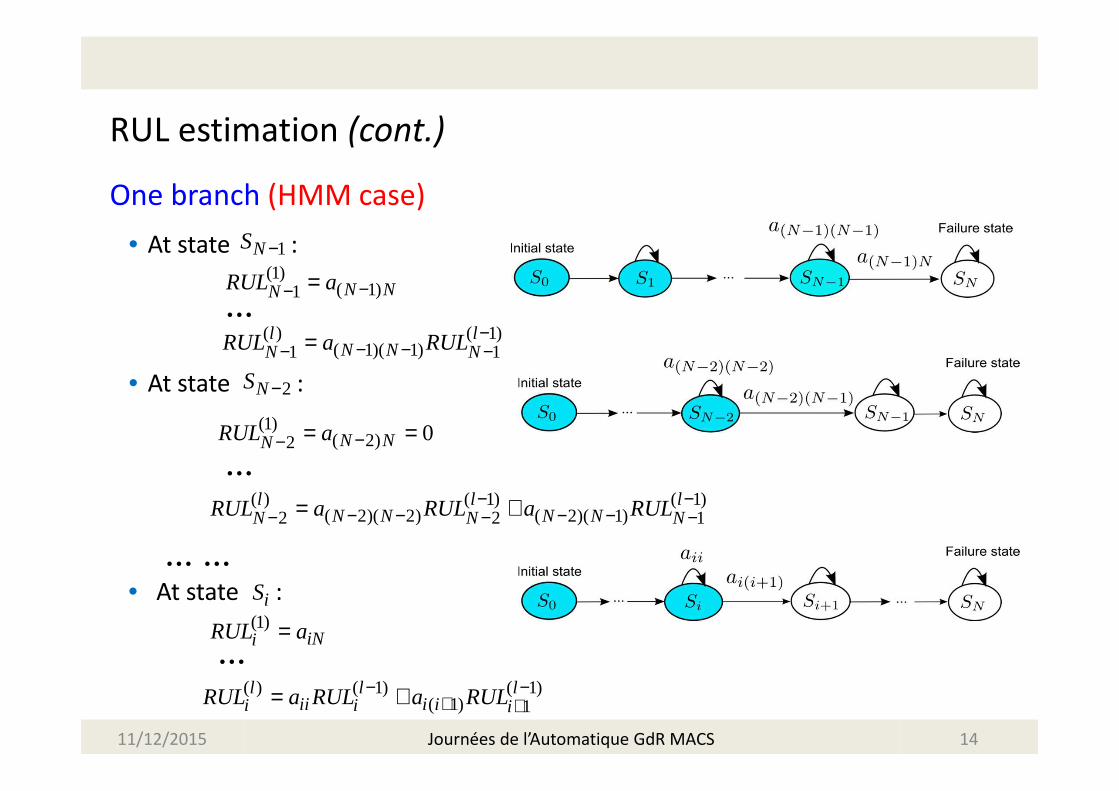
RUL estimation (cont.)
One branch (HMM case)
• At state :
• At state :
• At state :(1)i iNRUL a=
( ) ( 1) ( 1)( 1) 1
l l liii ii iiRUL RUL RULa a− −
+ += +
2NS −
(1)( 2)2 0N NNRUL a −− = =
iS
( ) ( 1) ( 1)( 2)( 2) ( 2)( 1)2 2 1
l l lN N N NN N NRUL LR a Ra UUL − −
− − − −− − −+=
...
...
... ...
1NS −(1)
( 1)1 N NNRUL a −− =
( ) ( 1)( 1)( 1)1 1
l lN NN NRRUL a UL −
− −− −=...
11/12/2015 14Journées de l’Automatique GdR MACS
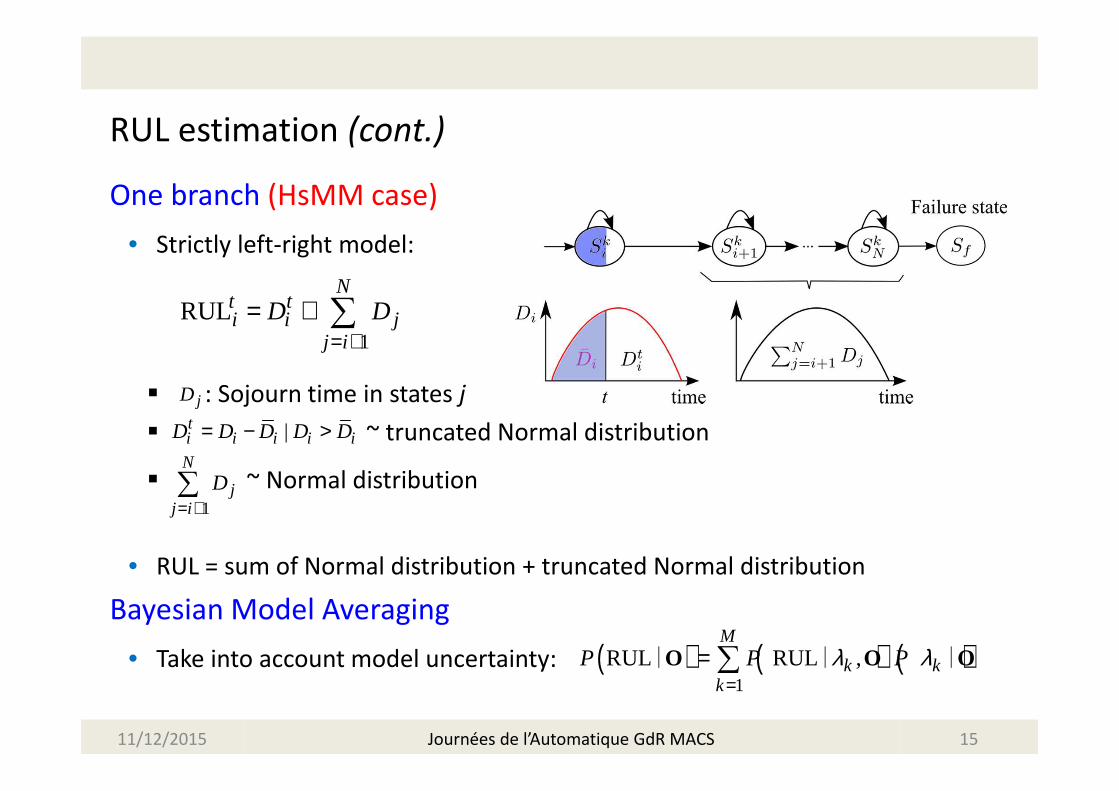
RUL estimation (cont.)
One branch (HsMM case)
• Strictly left-right model:
� : Sojourn time in states j
� ~ truncated Normal distribution
� ~ Normal distribution
• RUL = sum of Normal distribution + truncated Normal distribution
Bayesian Model Averaging
• Take into account model uncertainty: ( ) ( ) ( )1
RUL RUL ,M
k kk
P P Pλ λ=
= ∑O O O∣ ∣ ∣
1
RULN
t ti i j
j i
D D= +
= + ∑
|ti i i i iD D D D D= − >
jD
1
N
jj i
D= +∑
11/12/2015 15Journées de l’Automatique GdR MACS

Numerical examples
Simulated deterioration data
• Fatigue Crack Growth (FCG) model to represent the evolution of a crack depth
• Observation model:
• Multi-mode: Two propagation rates
– Crack depth is proportional with
( )1 1
tii i i
enw
t t b tx x e C e x tγβ− −
= + ∆
i i it t ty x ξ= +
0.005, 1.3, 1.7wC n σ= = =
Two-mode training data
eγ
1 22 , 100, 010 .5Lξ π πσ = == =
[ ]0 0.75Teγ =
11/12/2015 16Journées de l’Automatique GdR MACS

Numerical examples
Online RUL estimation (MB-HsMM model)
11/12/2015 17Journées de l’Automatique GdR MACS
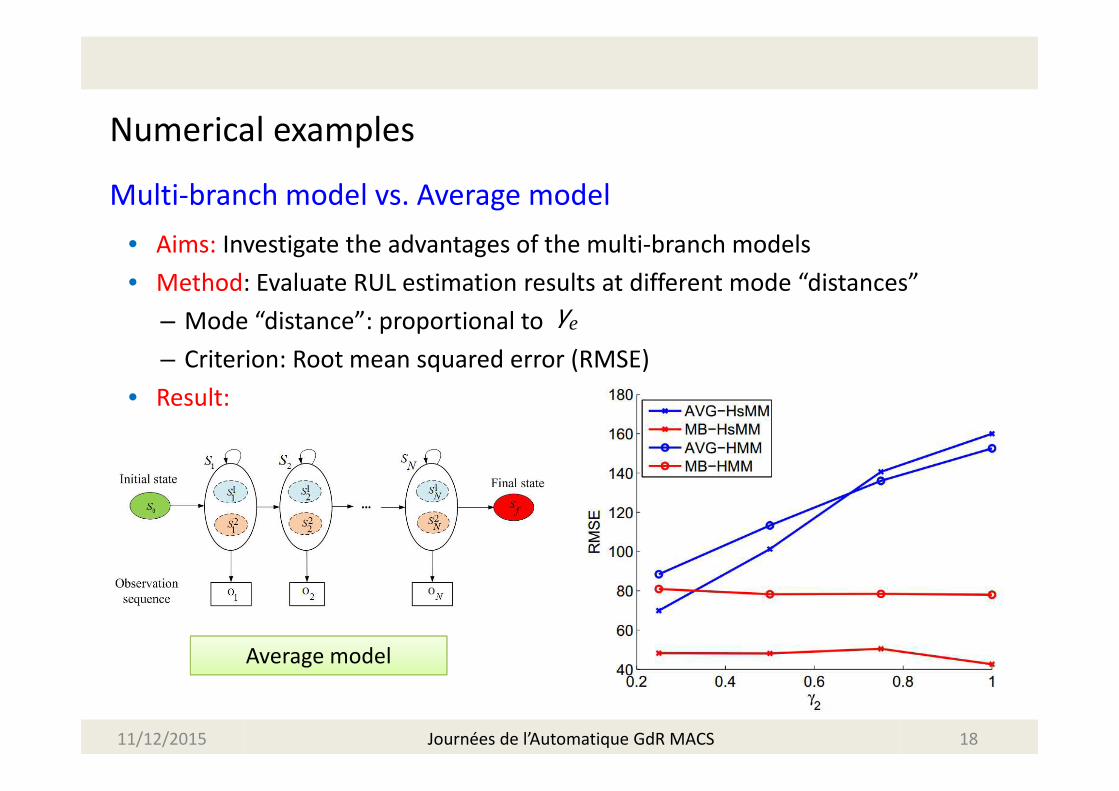
Numerical examples
Multi-branch model vs. Average model
• Aims: Investigate the advantages of the multi-branch models
• Method: Evaluate RUL estimation results at different mode “distances”
– Mode “distance”: proportional to
– Criterion: Root mean squared error (RMSE)
• Result:
Average model
eγ
11/12/2015 18Journées de l’Automatique GdR MACS

Case study (MB-HsMM model):
PHM08 competition
• C-MAPSS: Modeling a large realistic commercial turbofan engine
• 2 data set for training and test
• 218 identical and independent units
• Objective:
– Construct a prognostic method basing on training data set
– Use it to estimate the RUL of each unit in test data set
• Evaluation criterion:
Where is penalty score for unit i:
where
*C-MAPSS: Commercial Modular Aero-Propulsion System Simulation
218
1i
i
S S=
= ∑
iS
/13
/10
1, 0
1, 0
i
i
di
i di
e dS
e d
− − ≤= − >
i ii est reald RUL RUL= −
Simplified diagram of engine
simulated in C-MAPSS
11/12/2015 19Journées de l’Automatique GdR MACS
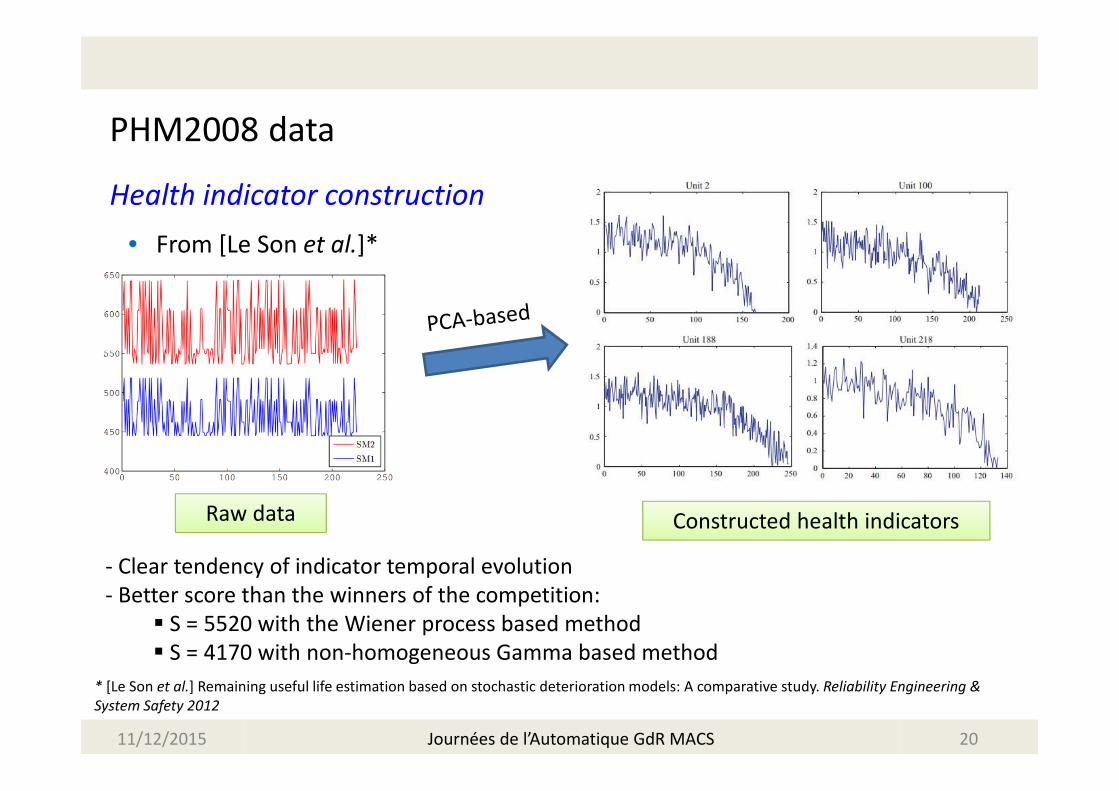
PHM2008 data
Health indicator construction
• From [Le Son et al.]*
* [Le Son et al.] Remaining useful life estimation based on stochastic deterioration models: A comparative study. Reliability Engineering &
System Safety 2012
11/12/2015 20
Raw data Constructed health indicators
- Clear tendency of indicator temporal evolution
- Better score than the winners of the competition:
� S = 5520 with the Wiener process based method
� S = 4170 with non-homogeneous Gamma based method
Journées de l’Automatique GdR MACS
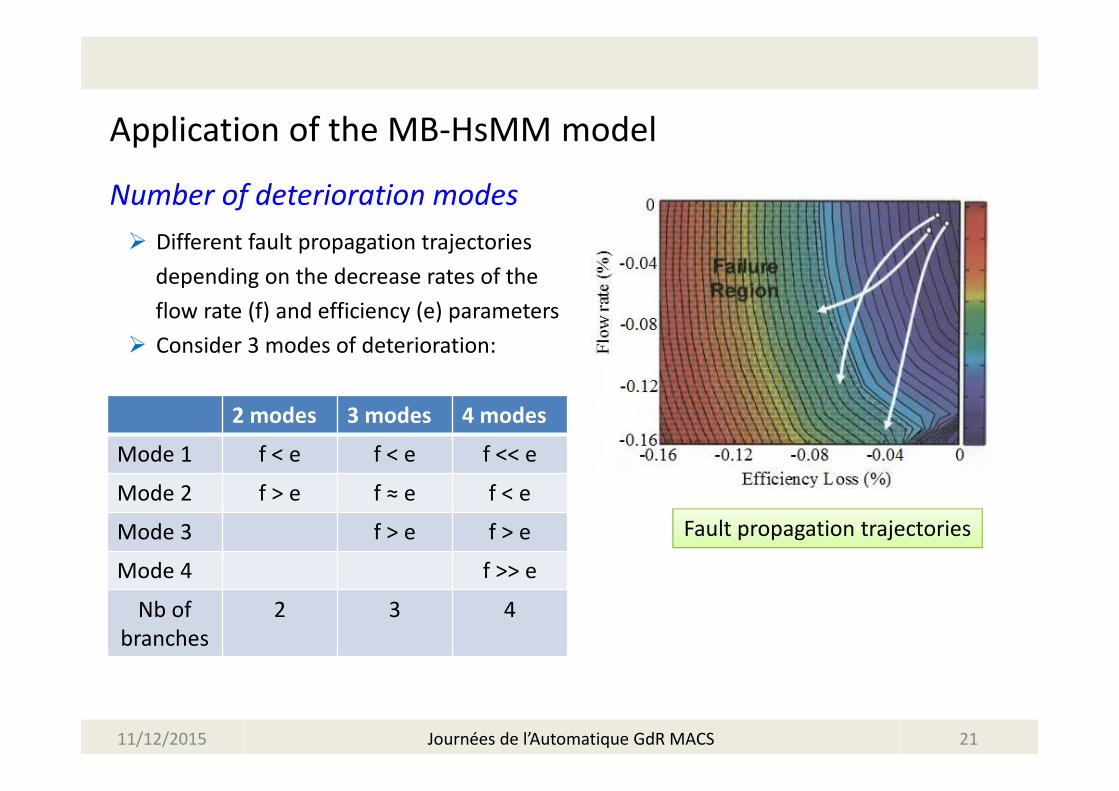
Application of the MB-HsMM model
Number of deterioration modes
� Different fault propagation trajectories
depending on the decrease rates of the
flow rate (f) and efficiency (e) parameters
� Consider 3 modes of deterioration:
11/12/2015 21
Fault propagation trajectories
2 modes 3 modes 4 modes
Mode 1 f < e f < e f << e
Mode 2 f > e f ≈ e f < e
Mode 3 f > e f > e
Mode 4 f >> e
Nb of
branches
2 3 4
Journées de l’Automatique GdR MACS
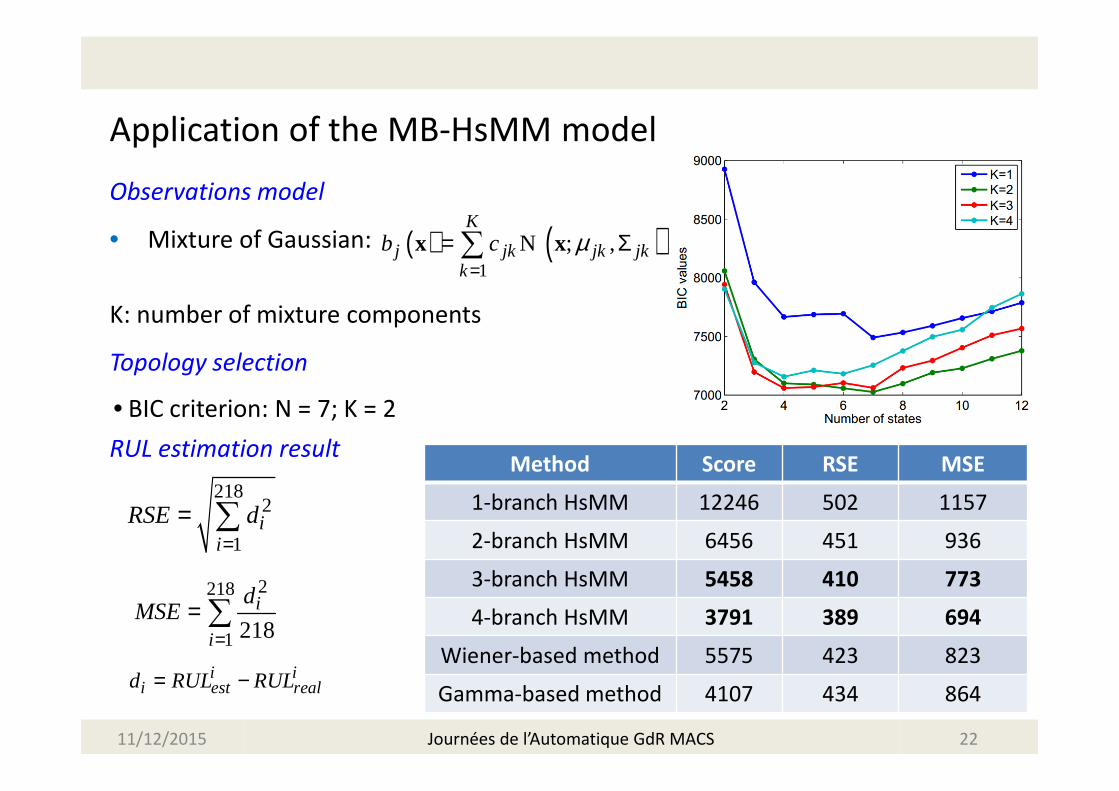
Application of the MB-HsMM model
Observations model
• Mixture of Gaussian:
K: number of mixture components
Topology selection
• BIC criterion: N = 7; K = 2
RUL estimation result
11/12/2015 22
Method Score RSE MSE
1-branch HsMM 12246 502 1157
2-branch HsMM 6456 451 936
3-branch HsMM 5458 410 773
4-branch HsMM 3791 389 694
Wiener-based method 5575 423 823
Gamma-based method 4107 434 864
Journées de l’Automatique GdR MACS
( ) ( )1
; ,K
j jk jk jkk
b c µ=
= Σ∑x xN
2182
1i
i
RSE d=
= ∑
2218
1 218i
i
dMSE
== ∑
i ii est reald RUL RUL= −
Multi-branch continuous-state models
11/12/2015 23Journées de l’Automatique GdR MACS
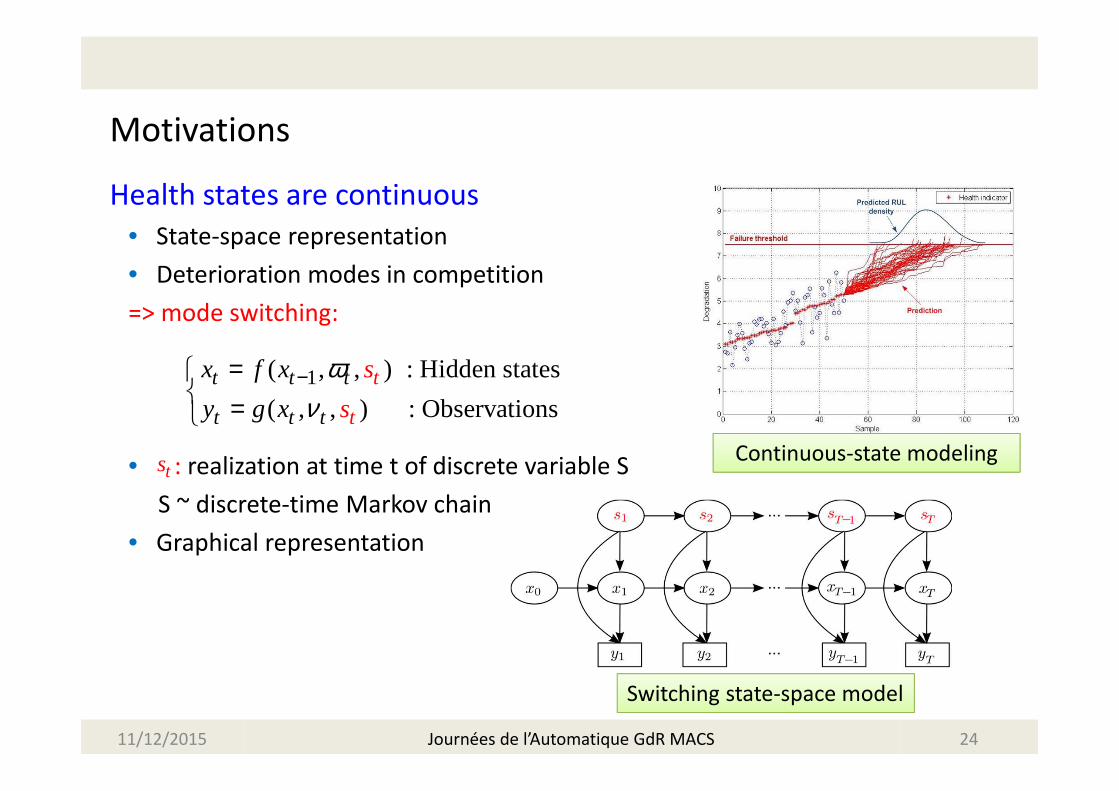
Motivations
Health states are continuous
• State-space representation
• Deterioration modes in competition
=> mode switching:
• : realization at time t of discrete variable S
S ~ discrete-time Markov chain
• Graphical representation
11/12/2015 24Journées de l’Automatique GdR MACS
1 , ) : Hidden states( ,
( , , ) : Observationst
t
t
tt
t
t
t sxf
y s
x
g x
ων
−= =
ts
Switching state-space model
Continuous-state modeling
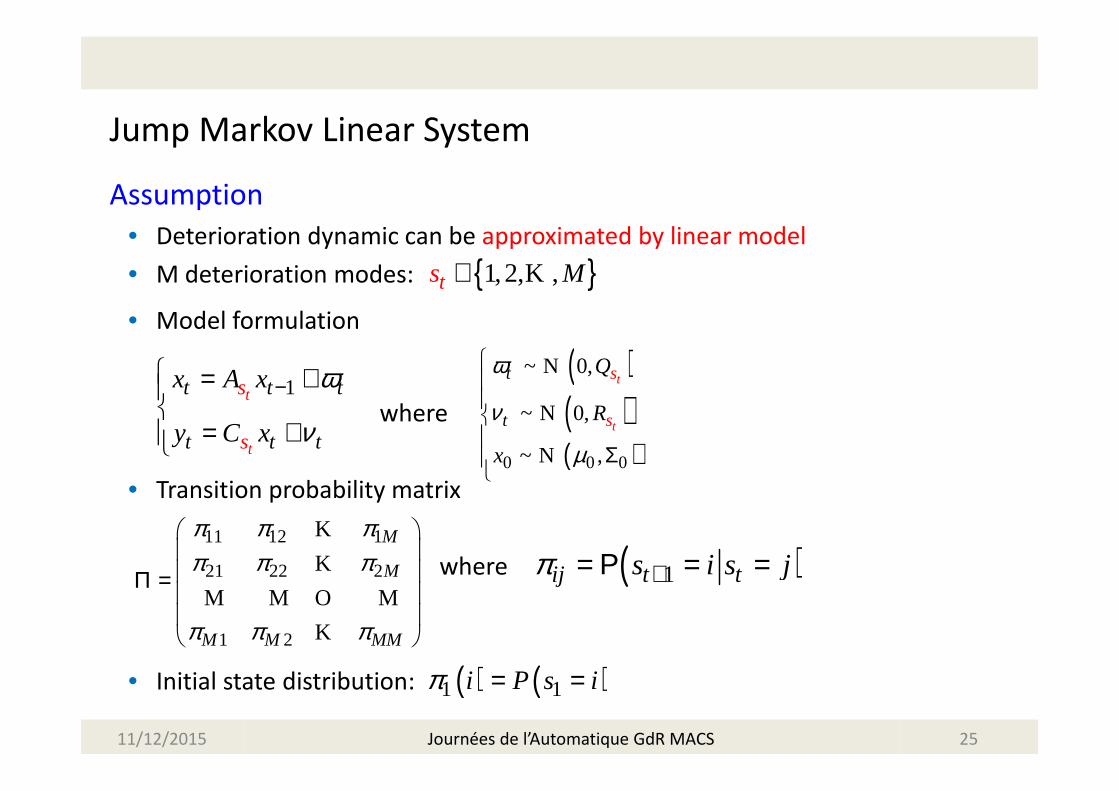
Jump Markov Linear System
Assumption
• Deterioration dynamic can be approximated by linear model
• M deterioration modes:
• Model formulation
where
• Transition probability matrix
where
• Initial state distribution:
11/12/2015 25
1t
t
t
t
s
s
t t
t t
x
y
A x
C x
ω
ν
−=
+=
+
( )( )( )0 0 0
~ 0,
~ 0,
~ ,
t
t
st
t s
Q
R
x
ω
ν
µ
Σ
N
N
N
Journées de l’Automatique GdR MACS
{ }1,2, ,ts M∈ K
11 12 1
21 22 2
1 2
M
M
M M MM
π π ππ π π
π π π
Π =
K
K
M M O M
K
( )1ij t ts i s jπ += Ρ = =
( ) ( )1 1i P s iπ = =
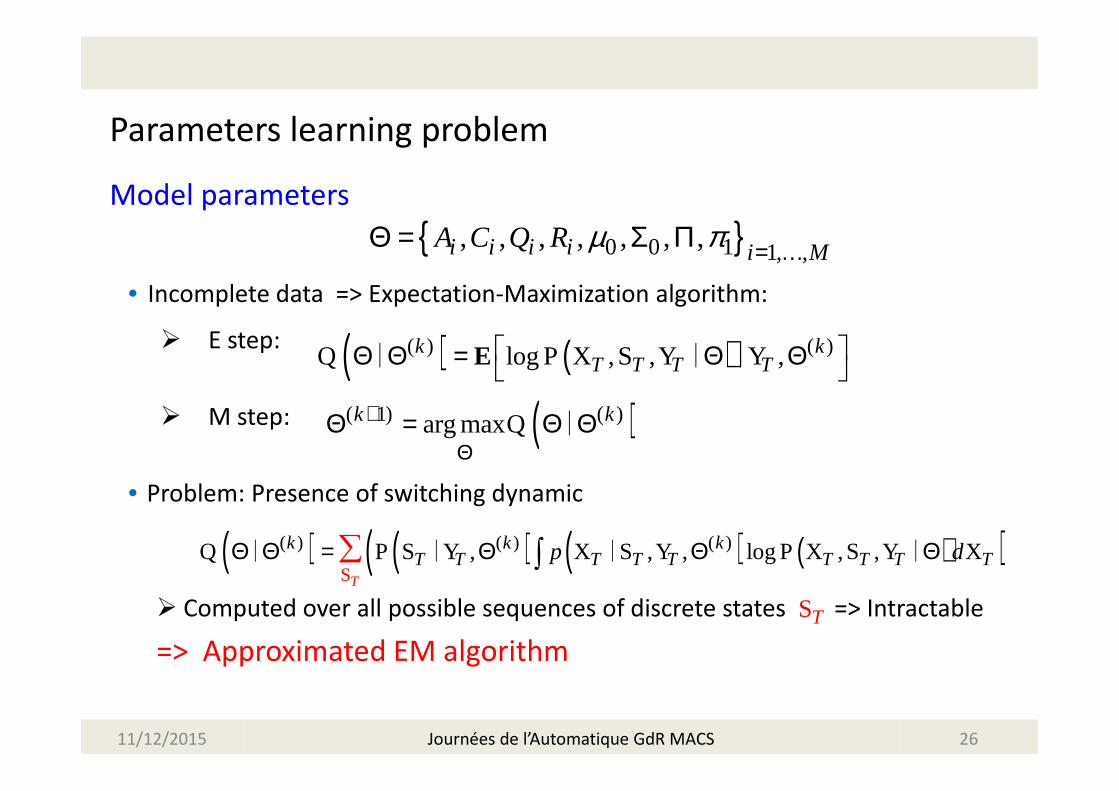
Parameters learning problem
Model parameters
• Incomplete data => Expectation-Maximization algorithm:
� E step:
� M step:
• Problem: Presence of switching dynamic
� Computed over all possible sequences of discrete states => Intractable
=> Approximated EM algorithm
11/12/2015 26
{ }0 0 1 1, ,, , , , , , ,i i i i i M
A C Q R µ π = …Θ = Σ Π
( ) ( )( ) ( )log , , ,k kT T T T
Θ Θ = Θ Θ
E PQ X S Y Y∣ ∣ ∣
( )( 1) ( )arg maxk k+
ΘΘ = Θ ΘQ ∣
( ) ( ) ( ) ( )( )( ) ( ) ( ), , , log , ,T
k k kT T T T T T T T Tp dΘ Θ = Θ Θ Θ∑ ∫P P
SQ S Y X S Y X S Y X∣ ∣ ∣ ∣
TS
Journées de l’Automatique GdR MACS

Approximated EM algorithm
Pruning technique
• Approximation: Calculate the sum over the most “likely” state sequence
• Adaption of the Viterbi algorithm
• Do not guarantee the convergence, but still sufficient in several practical cases
• Most important: the algorithm is linear in number of time steps.
From the traditional Viterbi algorithm…
• Define the best “partial cost” at time t:
• Then, for each state transition j -> i, assign an “innovation cost”:
11/12/2015 27
( )1
1,
( ) max log , , ,t t
t t t t tJ i s i−
−= =PS X
X Y S
( ) ( ) ( )( )
1,1 , , 1 , , 1 , ,, 1
1 , ,
1
21
log log ,2
j it i i i i t it t j i t t j i t t j it t
i i it t j i
J y C x C C R y C x
C C R j i
′ −+ + ++
+
′= − − Σ + −
′− Σ + + Π
∣ ∣ ∣
∣
Journées de l’Automatique GdR MACS
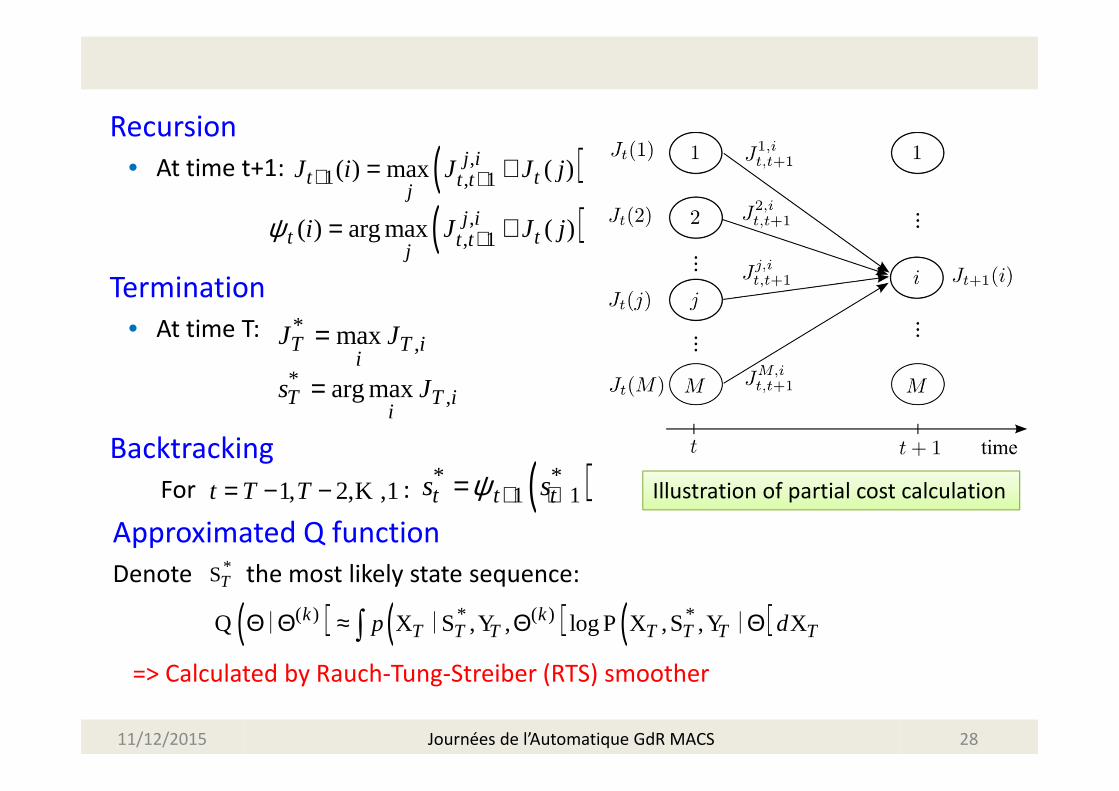
Recursion
• At time t+1:
Termination
• At time T:
Backtracking
For :
Approximated Q function
Denote the most likely state sequence:
=> Calculated by Rauch-Tung-Streiber (RTS) smoother
11/12/2015 28
*,maxT T i
iJ J=
( ),1 , 1( ) max ( )j i
t tt tj
J i J J j+ += +
1, 2, ,1t T T= − − K
( ),, 1( ) arg max ( )j i
t tt tj
i J J jψ += +
*,arg maxT T i
is J=
( )* *1 1t t ts sψ + +=
( ) ( ) ( )( ) * ( ) *, , log , ,k kT T T T T T Tp dΘ Θ ≈ Θ Θ∫ PQ X S Y X S Y X∣ ∣ ∣
*TS
Illustration of partial cost calculation
Journées de l’Automatique GdR MACS
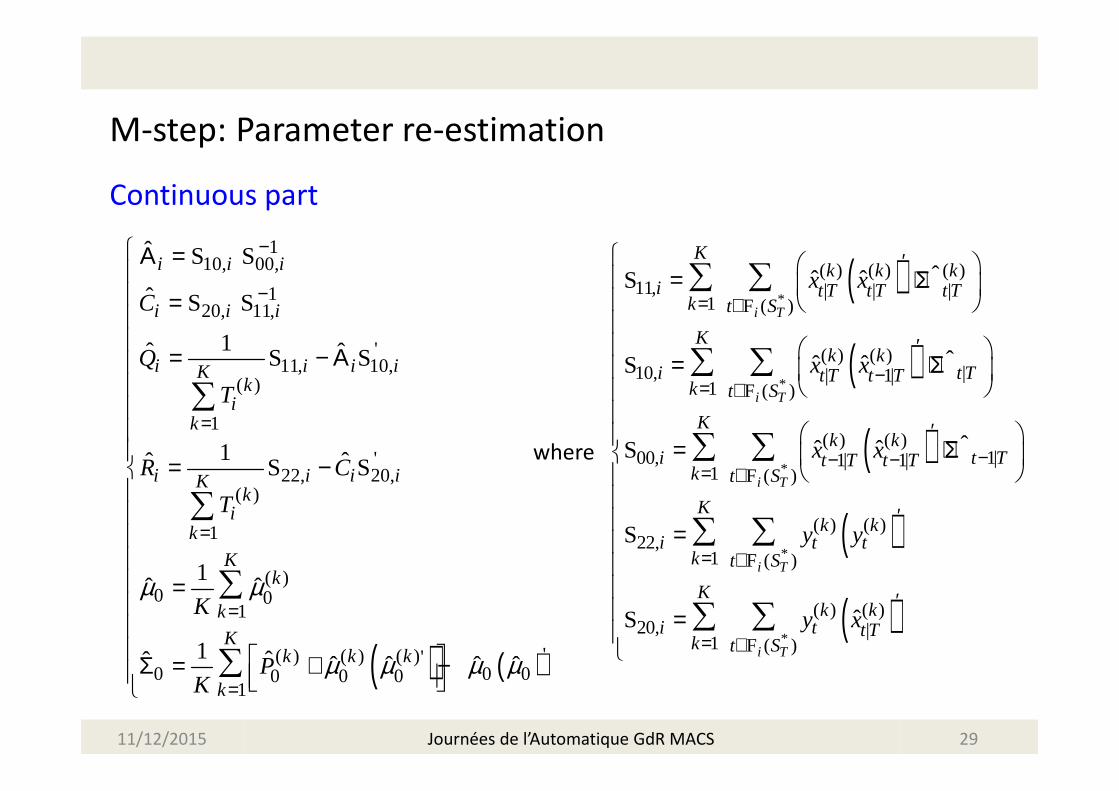
M-step: Parameter re-estimation
Continuous part
11/12/2015 29
( ) ( )
110, 00,
120, 11,
11, 10,( )
1
22, 20,( )
1
( )0 0
1
'( ) ( ) ( )0 0 00 0 0
1
'
'
'
ˆ
1ˆ ˆ
1 ˆˆ
1ˆ ˆ
1 ˆˆ ˆ ˆ ˆ ˆ
ˆi i i
i i i
i i i iKk
ik
i i i iKk
ik
Kk
k
Kk k k
k
C
Q
T
R C
T
K
PK
µ µ
µ µ µ µ
−
−
=
=
=
=
=
=
= − Α
= −
=
Σ = + −
Α
∑
∑
∑
∑
S S
S S
S S
S S
( )
( )
( )
( )
*
*
*
*
( ) ( ) ( )11, | | |
1 ( )
( ) ( )10, || 1|
1 ( )
( ) ( )00, 1|1| 1|
1 ( )
( ) ( )22,
1 ( )
20
ˆˆ ˆ
ˆˆ ˆ
ˆˆ ˆ
i T
i T
i T
i T
Kk k k
i t T t T t Tk t S
Kk k
i t Tt T t Tk t S
Kk k
i t Tt T t Tk t S
Kk k
i t tk t S
x x
x x
x x
y y
′
= ∈
′−
= ∈
′−− −
= ∈
′
= ∈
= + Σ
= + Σ
= + Σ
=
∑ ∑
∑ ∑
∑ ∑
∑ ∑
F
F
F
F
S
S
S
S
S ( )*
( ) ( ), |
1 ( )ˆ
i T
Kk k
i t t Tk t S
y x′
= ∈
=
∑ ∑F
where
Journées de l’Automatique GdR MACS
M-step: Parameter re-estimation
Discrete part
• Similar to the Hidden Markov model:
• We obtain:
where
11/12/2015 30
1ˆ ( ) number of times in state at time 1i i tπ = =
,number of transitions from state to state
number of transitions from state i ji j
iπ =
*( )1 ( 1)1
1ˆ k
T
K
S tk
eK
π === ∑
( )( ) ( ) 1
'( ) ( ) ( )
1 1 1
1ˆ diag
k kK T Tk k k
t t tk t tK
ξ ξ ξ
−
= = =
Π =
∑ ∑ ∑
*( )( )
( )kT
kt S t
eξ =
[ ]0 0 1 0 0ie = K K
ith element
Journées de l’Automatique GdR MACS
JMLS based diagnostics
Mode probabilities
• Given test data
• Denote the best state sequence at time t that ends in i
Health state assessment
where and are the mean value and variance given
11/12/2015 31
*,t iS
{ }1 2, , ,t ty y y= KY
( )( )
( )
*,
*, ,,
1
1( )
1 exp
t it t M
t j t it ij ii
i s i
J J
µ
≠=
= = = =
+ − ∑∑
PP
P
S
S
( )( )
,1
, , ,1 1
ˆ ˆ( )
ˆ ˆ ˆ ˆ ˆ( ) ( )
M
t t t ii
M MT
t i t i t t i t t i ti i
x i x
t i x x x x
µ
µ µ
=
= =
=
Σ = Σ +
− −
∑
∑ ∑
,ˆt ix ,t iΣ *,t iS
Journées de l’Automatique GdR MACS

RUL estimation
• Discrete time:
• If future mode changes are deterministic => can be estimated by multi-
step ahead Kalman prediction
• In JMLS case: M fold increase in number of Gaussian distributions to consider
⇒ Intractable computation
⇒ Approximation: merge all one-step predicted Gaussian distributions into one
Gaussian distribution
• Mode probability update
11/12/2015 32
( )min 1: t k tRUL k x L x L+= ≥ ≥ <∣
( ) ( )11 1 , 1 ,1
( ) ,M
tt t t t i t t ii
p x i xµ ++ + +=
≈ Σ∑ N∣ ∣ ∣
,11
( ) ( )j i
M
t tj
i jπµ µ+=
= ⋅∑
Journées de l’Automatique GdR MACS
t kx +

Numerical results
Mode training
• Two deterioration modes: quick-rate (mode 1) and normal-rate (mode 2)
• Real parameters
• Estimated parameters
11/12/2015 33
1 1 1 1
2 2 2 2
0 0
1.01 C 1 Q 0.015 R 2.5
1.002 C 1 Q 0.005 R 0.25
2 0.2
A
A
µ
= = = == = = == Σ =
10.3
0.7π
=
0.99 0.01
0.02 0.98
Π =
Convergence of the EM algorithm
1 1 1 1
2 2 2 2
0 0
ˆ ˆ ˆ ˆ1.01 C 1.01 Q 0.02 R 2.59
ˆ ˆ ˆ ˆ1.002 C 1 Q 0.01 R 0.25
ˆˆ 2.19 0.285
A
A
µ
= = = =
= = = =
= Σ =
10.3
ˆ0.7
π =
0.994 0.006ˆ0.011 0.989
Π =
Journées de l’Automatique GdR MACS
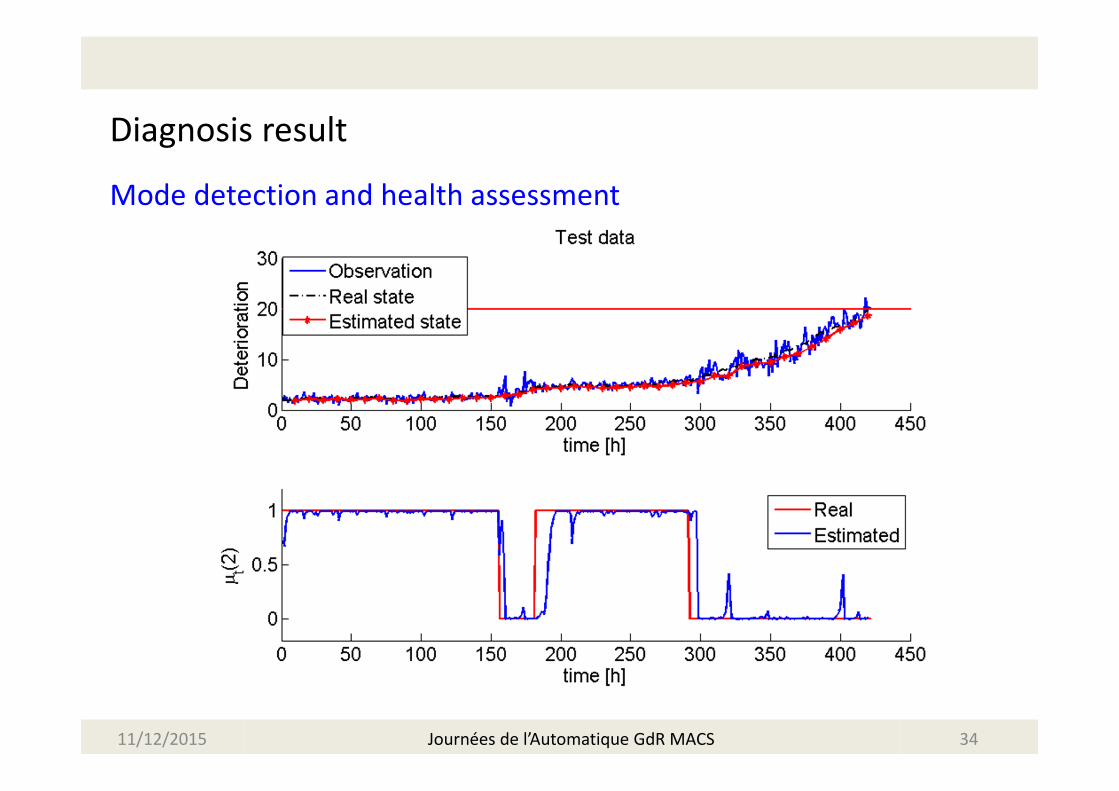
Diagnosis result
Mode detection and health assessment
11/12/2015 34Journées de l’Automatique GdR MACS
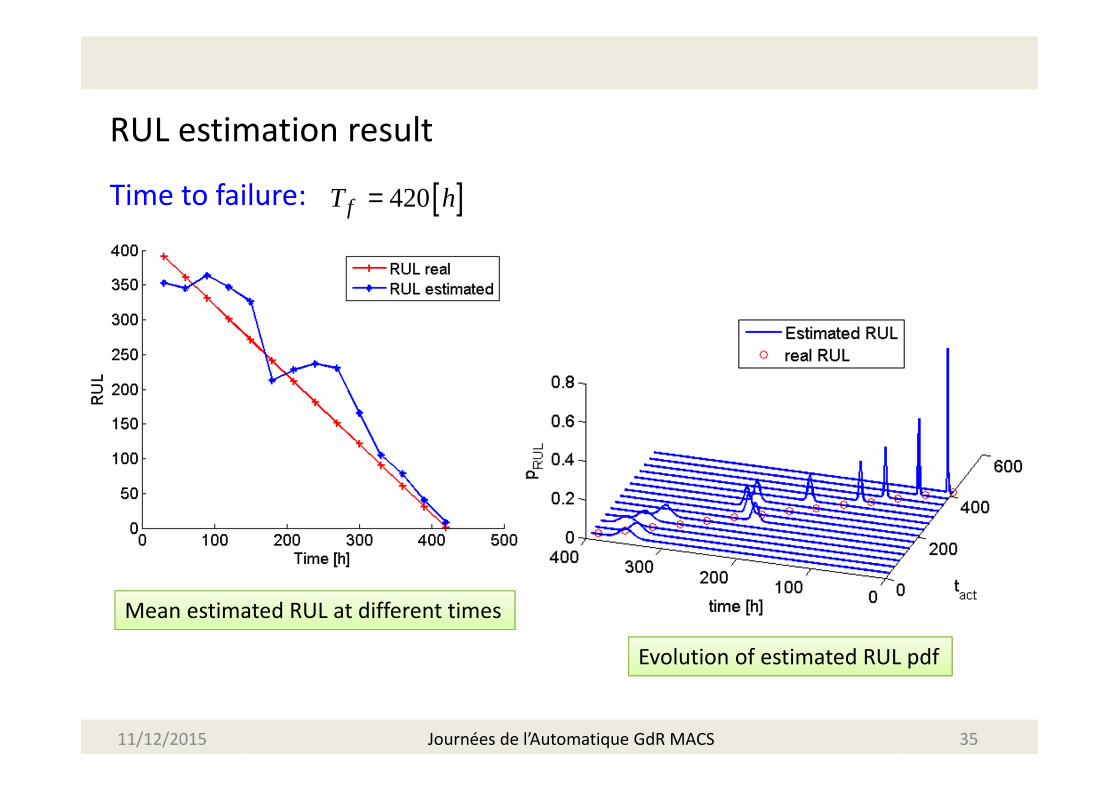
RUL estimation result
Time to failure:
11/12/2015 35
Mean estimated RUL at different times
Evolution of estimated RUL pdf
[ ]420fT h=
Journées de l’Automatique GdR MACS
Conclusion & Perspectives
Conclusion
• Development of multi-branch models to deal with the co-existence problem of
multiple deterioration modes
– Discrete health states: MB-HMM & MB-HsMM
– Continuous health states: JMLS
• Proposition of multi-branch models based framework for diagnostics &
prognostics
– Detection of actual deterioration mode
– Assessment of current health status
– Estimation of the RUL
Perspectives
• Extension of the JMLS model to the non-linear case
• Application with real-life data
11/12/2015 36Journées de l’Automatique GdR MACS
Thank you for your attention!
LE Thanh Trung
PhD student
GIPSA-lab, Grenoble Insititut of Technology
11 rue des Mathématiques – 38402 Saint Martin d’Hères cedex
Phone: +33 4 76 82 71 59 - Fax: +33 4 76 82 63 88
Email: [email protected]