
Methodes appliqu´ ees´ a l’analyse des` indicateurs de...
54
´ Ecole Nationale Sup´ erieure des T´ el´ ecommunications - ´ Ecole Nationale des Ponts et Chauss´ ees - ´ Ecole Nationale des Sciences G´ eographiques Cycle de Master en Management des Syst` emes d’Information et Applications G´ eographiques Rapport de stage de fin d’´ etudes M´ ethodes appliqu´ ees ` a l’analyse des indicateurs de la complexit´ e du trafic a´ erien R´ ealis´ e par HE Yi Stage effectu´ e au cours de la p´ eriode du 1 Septembre 2006 au 28 F´ evrier 2007 ` a l’ ´ Ecole Nationale de l’Aviation Civile Sous la direction de M. David GIANAZZA Enseignant-Chercheur ` a la Sous Direction des ´ Etudes et de la Recherche Appliqu´ ee Mots clefs : Secteur a´ erien, Complexit´ e du trafic a´ erien (densit´ e dynamique), clipping de polygones arbitraires, clustering, k-means.
Transcript of Methodes appliqu´ ees´ a l’analyse des` indicateurs de...
Ecole Nationale Superieure des Telecommunications -Ecole Nationale desPonts et Chaussees -Ecole Nationale des Sciences Geographiques
Cycle de Master en Management des Systemes d’Information etApplications Geographiques
Rapport de stage de fin d’etudes
Methodes appliqueesa l’analyse desindicateurs de la complexite du trafic aerien
Realise par HE Yi
Stage effectue au cours de la periode du 1 Septembre 2006 au28 Fevrier 2007a l’Ecole Nationale de l’Aviation Civile
Sous la direction de M. David GIANAZZAEnseignant-Chercheur a la Sous Direction desEtudes et de la Recherche Appliquee
Mots clefs : Secteur aerien, Complexite du trafic aerien (densite dynamique),clipping depolygones arbitraires,clustering, k-means.

Le 13 fevrier 2007Non confidentiel
i
i
Remerciements
Je remercie tout d’abord toutes les personnes qui ont rendu ce travail possible par leur aide etleurs contributions.
Je tiens a exprimer mes remerciements les plus sinceres amon tuteur du stage, MonsieurDavid Gianazza, pour la confiance qu’il m’a accordee et pourm’avoir guide, suivi et aide tout aulong de la mission.
Je remercie egalement Messieurs Jean-Marc Alliot et Nicolas Durand en tant que directeursdu laboratoire pour m’avoir permis de realiser mes recherches au sein de leur laboratoire ainsique pour leur attention aux mes problemes du logement et de la condition du travail.
J’adresse tout particulierement mes remerciements a Messieurs Pascal Brisset, Nicolas Bar-nier et Nicolas Archambault pour leurs disponibilites et aides precieuses.
Ce travail de rapport a ete prepare au laboratoire LOG. Je voudrais adresser mes remercie-ment a tous les membres des laboratoire, pour leurs amities, conseils et encouragements.
Je remercie chaleureusement Monsieur Vincent Aguilera, Directeur du Mastere MSIAG al’Ecole Nationale des Ponts et Chaussees, pour m’avoir accueilli en France pendant ces deuxannees au sein de cette formation d’ingenieurs.
Enfin, mes remerciements sont adresses a ma famille et a mes amis chinois pour leur soutien.


Resume
Nous etudions ici l’amelioration du modele d’estimation de la charge de travail du controleuraerien (”aiguilleur du ciel”) a partir d’indicateurs de la complexite du trafic aerien. Ce modeleest developpe par le projet S2D2 de la Sous-Direction desEtudes et de la Recherche appliquee(SDER) de la DSNA/DTI.
Nous avons implante un algorithme venant de l’infographie(clipping de polygones) quipermettra de calculer de nouveaux indicateurs plus precis, relatifs a la geometrie des secteursaeriens. Par ailleurs, nous avons applique une techniquedeclusteringpour obtenir une classifi-cation des secteurs aeriens en fonction de deux criteres :le croisement des flux aeriens dans lesecteur, et les evolutions verticales des avions.
Nous avons montre qu’on ne pouvait pas classer les secteursen fonction du fait que lesavions suivent des routes paralleles ou des routes qui se croisent, car ce n’est generalement pasune caracteristique constante dans le temps pour un secteur donne. Par contre, le critere desevolutions verticales permet bien de distinguer des groupes de secteurs. L’appartenance d’unsecteur a un tel groupe definit un nouvel indicateur de complexite, plus simple et plus robusteque celui utilise jusqu’a present.
Table des matieres
Remerciements i
Resume iii
Liste des abreviations et sigles vii
Liste des tableaux ix
Table des figures xi
Introduction 1
I Contr ole aerien 3I.1 Presentation generale . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 3I.2 Services du controle aerien . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 5I.3 Conception actuelle de la gestion du trafic aerien . . . . .. . . . . . . . . . . . 5I.4 Organisations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 6
II Contexte du stage de Master 10II.1 Cadre du stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 10II.2 Complexite du trafic aerien . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 11
II.2.1 Caracteristiques des mesures de complexite . . . . .. . . . . . . . . . . 11II.2.2 Evaluation des indicateurs . . . . . . . . . . . . . . . . . . . . .. . . . 11
II.3 Projet S2D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12II.3.1 Objectifs du projet . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 12II.3.2 Relation entre la complexite du trafic aerien et la configuration des sec-
teurs aeriens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13II.3.3 Demarche et resultats du projet . . . . . . . . . . . . . . . .. . . . . . . 13
II.4 Quelques questions ouvertes . . . . . . . . . . . . . . . . . . . . . .. . . . . . 16
17
TABLE DES MATIERES TABLE DES MATIERES
III Calcul du volume utile d’un secteur aerien 17III.1 Description geographique des secteurs . . . . . . . . . . .. . . . . . . . . . . . 17III.2 Presentation de la demarche . . . . . . . . . . . . . . . . . . . .. . . . . . . . 18III.3 Clipping de polygones . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 19III.4 Principe de l’algorithme . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 21
III.4.1 Choix du sens de parcours . . . . . . . . . . . . . . . . . . . . . . .. . 21III.4.2 Statut des points d’intersection . . . . . . . . . . . . . . .. . . . . . . . 22
III.5 Choix de la structure de donnees . . . . . . . . . . . . . . . . . .. . . . . . . . 22III.6 Description detaillee . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 24
III.6.1 Phase 1 : Calculer toutes les intersections . . . . . . .. . . . . . . . . . 24III.6.2 Phase 2 : Definir le statut des points d’intersection . . . . . . . . . . . . 24III.6.3 Phase 3 : Former les nouveaux polygones . . . . . . . . . . .. . . . . . 25
III.7 Cas particuliers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 26III.8 Resultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 27III.9 Perspectives d’utilisation . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 27
IV Analyse d’indicateurs de la complexite 29IV.1 Objectifs de l’etude . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 29IV.2 Demarche proposee . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 30IV.3 Methode des k-means . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 31
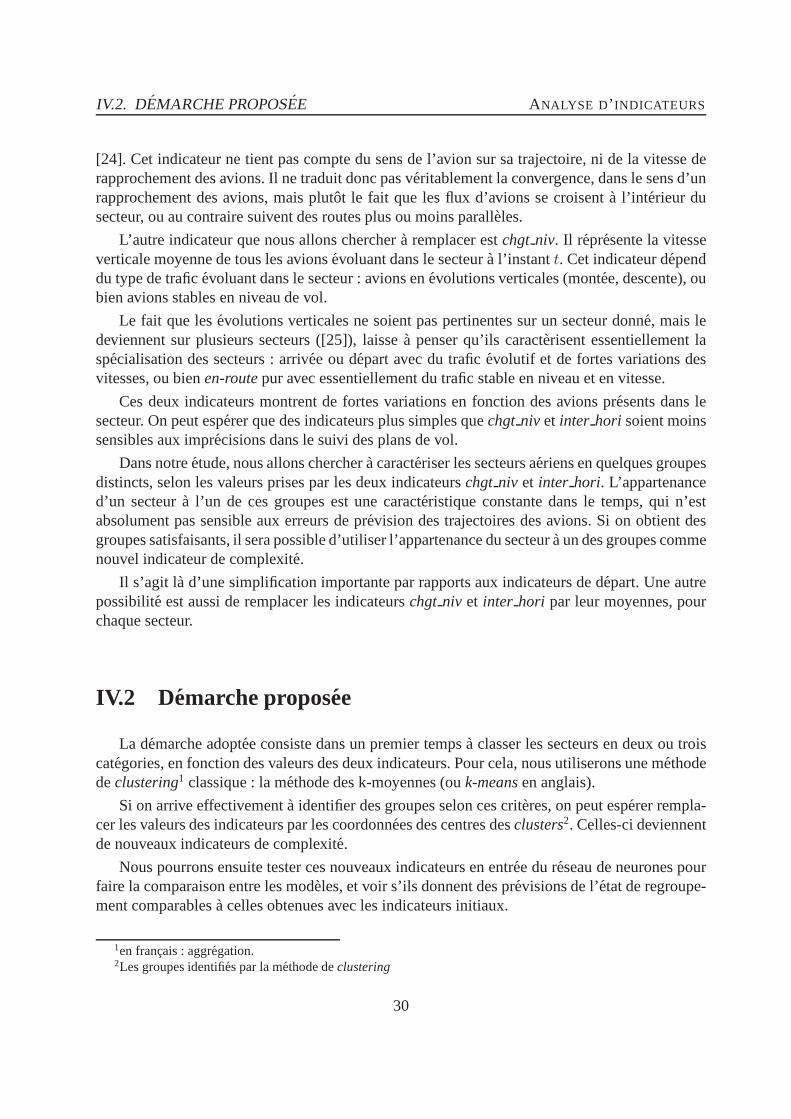
IV.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31IV.3.2 Algorithme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
IV.4 Logiciel utilise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 32IV.5 Resultats du clustering . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 33IV.6 Comparaison des differents modeles . . . . . . . . . . . . . .. . . . . . . . . . 34
IV.6.1 Definition du BIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35IV.6.2 Resultats sur les nouveaux indicateurs . . . . . . . . . .. . . . . . . . . 35
Conclusion et perspectives 36
Bibliographie 39
v

vii
Liste des abreviations et sigles
OACI : Organisation de l’Aviation Civile Internationale
EUROCONTROL : Organisation europeenne pour la securite de la navigation aerienne
DGAC : Direction Generale de l’Aviation Civile
DSNA : Direction des Services de la Navigation Aerienne
DTI : Direction de la Techinque et de l’Innovation
SDER : Sous-Direction desEtudes et de la Recherche appliquee
ENAC : Ecole Nationale de l’Aviation Civile
LOG : Laboratoire d’Optimisation Globale
LEEA : Laboratoire d’Economie et d’Econometrie de l’Aerien
NASA : National Aeronautics and Space Administration
S2D2 : Sector Status and Dynamic Density
ACP : Analyse en Composantes Principales
BIC : Bayesian Information Criterion


LISTE DES TABLEAUX ix
Liste des tableaux
II.1 Liste des indicateurs implementes dans S2D2 . . . . . . .. . . . . . . . . . . . 14II.2 Liste des variables representatives des composantesprincipales dans S2D2 . . . . 15
IV.1 Comparaison de BIC des modeles1 . . . . . . . . . . . . . . . . . . .. . . . . . 35IV.2 Comparaison de BIC des modeles2 . . . . . . . . . . . . . . . . . . .. . . . . . 36


TABLE DES FIGURES xi
Table des figures
I.1 En 2006, la croissance globale du trafic a ete de 3,70% par rapport a 2005. Cettehausse est la plus elevee des trois dernieres annees. . .. . . . . . . . . . . . . . 3
I.2 Controle aerien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 4I.3 Membres de l’EUROCONTROL . . . . . . . . . . . . . . . . . . . . . . . . . .7
II.1 Principe des reseaux MLP . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 15
III.1 Un exemple declippingdes polygones arbitraires . . . . . . . . . . . . . . . . . 19III.2 Fusion de deux parties de frontiere . . . . . . . . . . . . . . .. . . . . . . . . . 20III.3 Categorie de points d’intersection . . . . . . . . . . . . . .. . . . . . . . . . . 21III.4 Structure de donnees et algorithme pour les polygones dans la figure III.3 . . . . 23III.5 Une exemple de cas particulier . . . . . . . . . . . . . . . . . . . .. . . . . . . 26III.6 Une exemple de resultat . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 27
IV.1 Principe de k-means . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 32IV.2 Resultat duclustering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34


Introduction
Depuis le 17 decembre 1903, ou les freres Wright ont effectue le premier vol pilote avec unappareil a moteur plus lourd que l’air, l’aviation a beaucoup evolue. Malgre une baisse temporairedue a l’evenement du 11 septembre 2001, la croissance du trafic aerien est estimee tres rapidedans les prochaines dizaines annees. Dans mon pays natal, la Chine, on constate egalement uneforte demande sur la capacite des secteurs aeriens. Assurer la securite des aeronefs est une tachecomplexe et indispensable. Avec la croissance du trafic, l’analyse de la complexite du trafic aerienet l’etude de son influence sur la charge de travail des controleurs aeriens (”aiguilleurs du ciel”)sont devenues de plus en plus importante dans le domaine de l’ATM (Air Traffic Management1).
L’espace aerien est decoupe en secteurs geographiquesplaces sous la responsabilite de controleursaeriens charges d’eviter les collisions entre les aeronefs, et d’assurer une circulation fluide.Les secteurs de controle sont composes de secteurs elementaires, qui peuvent etre regroupesde differentes facon et avoir des formes differentes, etqui sont traverses pas des flux de traficvaries (avions evolutifs ou stables, qui se croisent ou non, etc). Ces facteurs de complexite ontune influence sur la charge de travail.
Un grand nombre d’indicateurs de complexite sont proposes dans des rapports, articles, ourevues traitant de la gestion du trafic aerien, et il existe de nombreuses etudes portant sur larelation entre ces indicateurs et la charge de travail du controleur. En regle generale, ces travauxcherchent a maximiser la correlation entre les valeurs des indicateurs de complexite et une ouplusieurs variables supposees representer la charge de travail reelle du controleur, comme parexemple des mesures de l’activite physiologique ou physique, ou bien le nombre et la naturedes interactions avec un systeme automatise, ou encore les resultats d’un modele de simulationdes taches du controleur. Parmi les variables dependantes les plus utilisees, on trouve des notessubjectives, attribuees par des controleurs a des situations de trafic, en simulation en temps reelou sur des enregistrements de trafic reel.
Le projet S2D2 (Sector status and dynamic density), mene encollaboration entre le La-boratoire d’Economie et d’Econometrie de l’Aerien (LEEA) et le Laboratoire d’OptimisationGlobale (LOG), propose d’utiliser la facon dont les secteurs elementaires sont regroupes surles positions de controle comme variable dependante, representative de la charge de travail descontroleurs. Il cherche a degager d’eventuelles corr´elations entre cet etat de regroupement et uncertain nombre d’indicateurs, basiques (nombre d’avions,flux entrants), ou plus evolues, qui seveulent representatifs de la complexite du trafic dans un secteur choisi. Les premiers resultatsobtenus en utilisant des reseaux de neurones ont permis d’identifier six indicateurs pertinents
1Gestion du trafic aerien
TABLE DES FIGURES TABLE DES FIGURES
parmi les vingt-huit testes jusqu’a present.Parmi ces indicateurs, on trouve notamment le volume du secteur aerien, la moyenne des
vitesses verticales de tous les avions evoluant dans le secteur a l’instantt, et le nombre de pairesd’avions se croisant avec un angle superieur a vingt degr´es. Les resultats du projet S2D2 ontamene certaines questions sur ces indicateurs. Tout d’abord, le volume effectivement utilisabledans un secteur aerien peut varier en fonction de l’activite militaire dans certaines zones d’espace.Or c’est le volume total, constant au cours du temps, qui a ete utilise.
D’autre part, les deux autres indicateurs evoques (moyenne des vitesses verticales et nombrede croisements) refletent en partie l’organisation structurelle des flux de trafic. Par exemple, danscertains secteurs (arrivee ou depart d’aeroport, par exemple) on trouvera essentiellement du traficen evolution verticale, et dans d’autres uniquement du trafic stable en niveau de vol. On peut sedemander si une simple caracterisation des secteurs selonce genre de criteres ne pourrait pasremplacer les indicateurs calcules toutes les minutes.
L’objectif du travail presente dans ce rapport est de discuter et analyser de nouveaux indica-teurs qui repondent a ces questions. Le document est structure de la facon suivante. Le domainedu controle aerien est brievement presente dans le chapitre I, et le contexte du stage est decritau chapitre II. Le chapitre III decrit l’implantation en language Ocaml d’un algorithme declip-pingde polygones qui permettra de calculer le volume utile d’un secteur aerien. Dans le chapitreIV, on etudie la possibilite de caracteriser les secteurs aerien, par des methodes declustering,en fonction des valeurs moyennes des indicateurs representatifs des evolutions verticales et dela proportion de croisements avec un angle superieur a vingt degres. Enfin, le dernier chapitreconclut et presente les perspectives futures de ce travail.
2
Chapitre I
Contr ole aerien
I.1 Presentation generale
L’activite du controle aerien s’exerce dans un contextede croissance forte du trafic. De 1987a 2001, le nombre de vols pris en charge (mouvements IFR) a plus que double, passant d’un peuplus de 1 million a plus de 2,5 millions.
En plus de cela, le croisement des grands axes de circulationnord-sud et est-ouest fait duciel francais le plus charge d’Europe ([1]) en 2003, 42,3%des mouvements sont constitues dessurvols du pays a haute altitude et les mouvements internationaux representent 37,7% du traficsuivi par le controle aerien francais. L’objectif des services de la navigation aerienne est de fairepasser un maximum d’avions en maintenant des conditions de securite optimales.
FIG. I.1 – En 2006, la croissance globale du trafic a ete de 3,70%par rapport a 2005. Cette hausseest la plus elevee des trois dernieres annees.
En 2003, les centres en route de la navigation aerienne ont controle 6898 vols en moyennequotidienne et plus de 8000 vols a 21 reprises. La pointe absolue de trafic a ete atteinte le 21 juin2002 avec 8524 vols controles.
I.1. PRESENTATION GENERALE CHAPITRE I. CONTROLE AERIEN
En 2006, le nombre de vols controles etait de 2 750 000 environ (source DSNA). La journeela plus chargee de l’annee a ete le vendredi 7 juillet avec 9200 vols controles. 65 journees ontenregistre plus de 8500 vols.
La mise en place du controle aerien, au debut du vingtieme siecle, a d’abord consiste a organi-ser la circulation aerienne. La commission qui en fut chargee avait pour objectif de standardiserles regles de l’air definissant les priorites et les autorisations pour utiliser les espaces aeriens.Puis, le controle aerien a repondu a une demande de securite. En effet, la naissance du pilotagesans visibilite a eu recours au guidage, dont le but est d’organiser la separation des vols les unspar rapport aux autres, a l’aide de moyens techniques diff´erents.
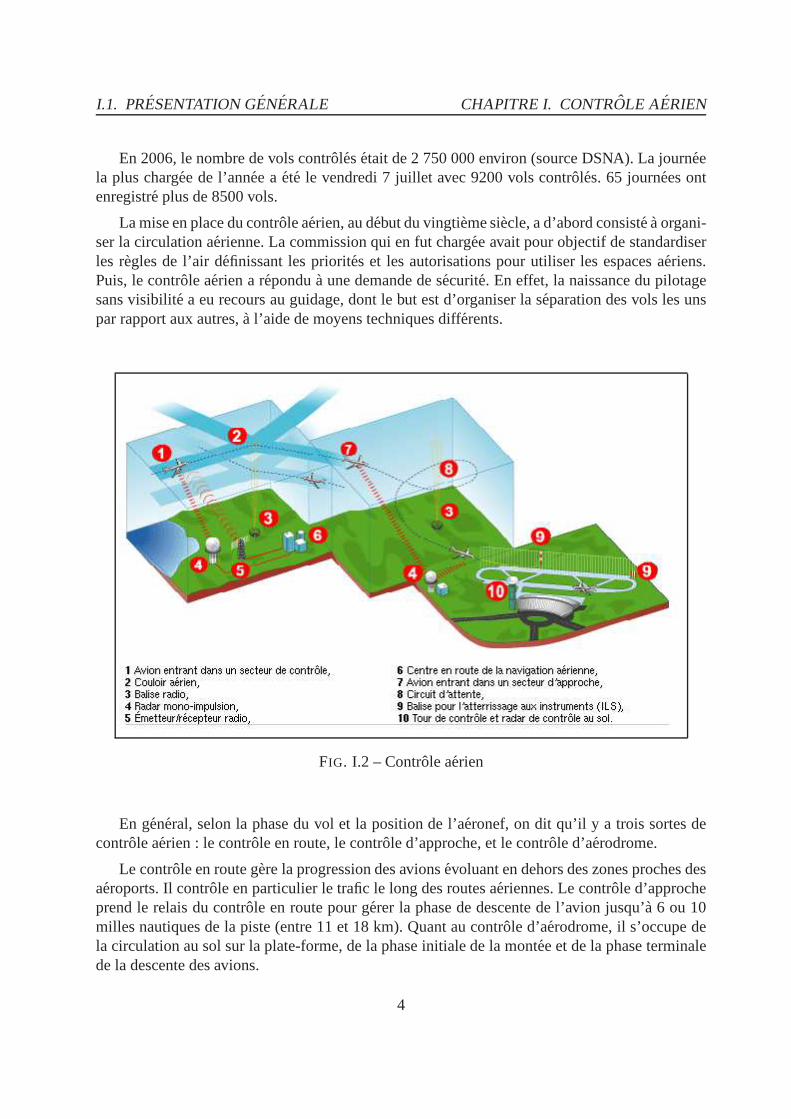
FIG. I.2 – Controle aerien
En general, selon la phase du vol et la position de l’aeronef, on dit qu’il y a trois sortes decontrole aerien : le controle en route, le controle d’approche, et le controle d’aerodrome.
Le controle en route gere la progression des avions evoluant en dehors des zones proches desaeroports. Il controle en particulier le trafic le long desroutes aeriennes. Le controle d’approcheprend le relais du controle en route pour gerer la phase de descente de l’avion jusqu’a 6 ou 10milles nautiques de la piste (entre 11 et 18 km). Quant au controle d’aerodrome, il s’occupe dela circulation au sol sur la plate-forme, de la phase initiale de la montee et de la phase terminalede la descente des avions.
4
LE CONTROLE AERIEN I.2. SERVICES DU CONTROLE AERIEN
I.2 Services du controle aerien
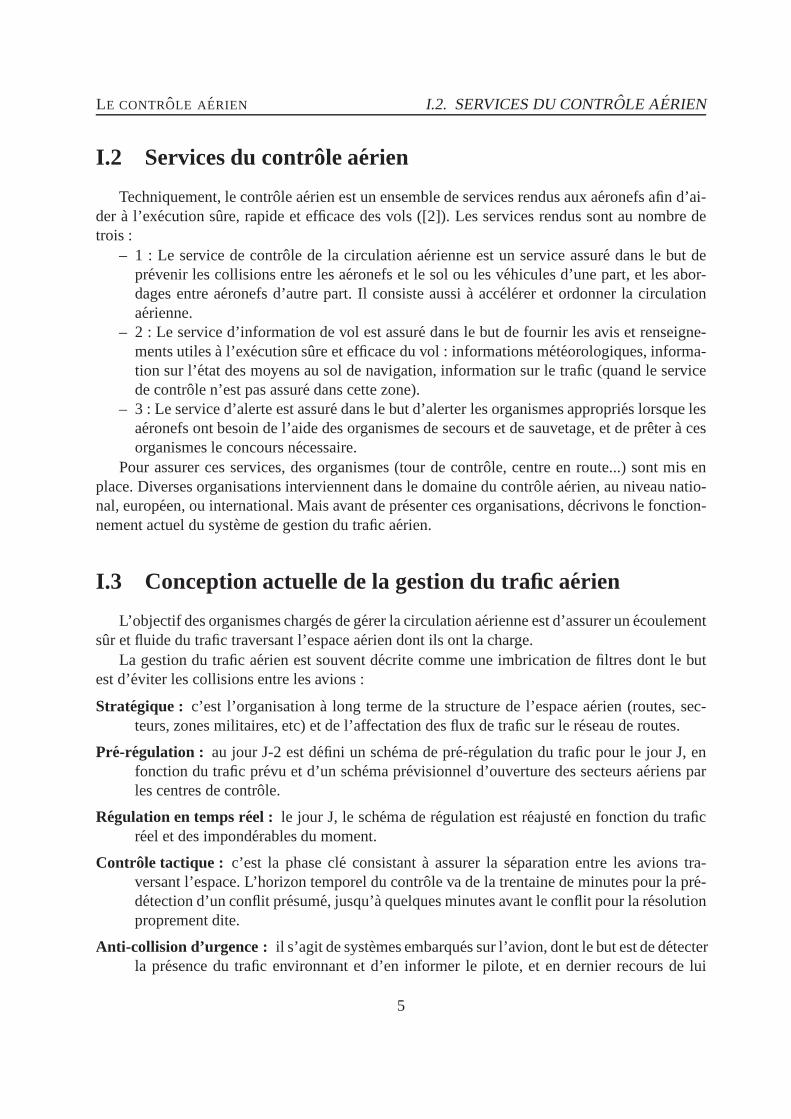
Techniquement, le controle aerien est un ensemble de services rendus aux aeronefs afin d’ai-der a l’execution sure, rapide et efficace des vols ([2]).Les services rendus sont au nombre detrois :
– 1 : Le service de controle de la circulation aerienne est un service assure dans le but deprevenir les collisions entre les aeronefs et le sol ou lesvehicules d’une part, et les abor-dages entre aeronefs d’autre part. Il consiste aussi a accelerer et ordonner la circulationaerienne.
– 2 : Le service d’information de vol est assure dans le but defournir les avis et renseigne-ments utiles a l’execution sure et efficace du vol : informations meteorologiques, informa-tion sur l’etat des moyens au sol de navigation, information sur le trafic (quand le servicede controle n’est pas assure dans cette zone).
– 3 : Le service d’alerte est assure dans le but d’alerter lesorganismes appropries lorsque lesaeronefs ont besoin de l’aide des organismes de secours et de sauvetage, et de preter a cesorganismes le concours necessaire.
Pour assurer ces services, des organismes (tour de controle, centre en route...) sont mis enplace. Diverses organisations interviennent dans le domaine du controle aerien, au niveau natio-nal, europeen, ou international. Mais avant de presenterces organisations, decrivons le fonction-nement actuel du systeme de gestion du trafic aerien.
I.3 Conception actuelle de la gestion du trafic aerien
L’objectif des organismes charges de gerer la circulation aerienne est d’assurer un ecoulementsur et fluide du trafic traversant l’espace aerien dont ils ont la charge.
La gestion du trafic aerien est souvent decrite comme une imbrication de filtres dont le butest d’eviter les collisions entre les avions :
Strategique : c’est l’organisation a long terme de la structure de l’espace aerien (routes, sec-teurs, zones militaires, etc) et de l’affectation des flux detrafic sur le reseau de routes.
Pre-regulation : au jour J-2 est defini un schema de pre-regulation du trafic pour le jour J, enfonction du trafic prevu et d’un schema previsionnel d’ouverture des secteurs aeriens parles centres de controle.
Regulation en temps reel : le jour J, le schema de regulation est reajuste en fonction du traficreel et des imponderables du moment.
Contr ole tactique : c’est la phase cle consistant a assurer la separation entre les avions tra-versant l’espace. L’horizon temporel du controle va de la trentaine de minutes pour la pre-detection d’un conflit presume, jusqu’a quelques minutes avant le conflit pour la resolutionproprement dite.
Anti-collision d’urgence : il s’agit de systemes embarques sur l’avion, dont le but est de detecterla presence du trafic environnant et d’en informer le pilote, et en dernier recours de lui
5

I.4. ORGANISATIONS LE CONTROLE AERIEN
fournir des avis d’evitement lorsqu’une collision est anticipee. L’horizon temporel de l’an-ticollision est d’environ 45 secondes avant la collision presumee.
Pour ce qui concerne le controle aerien tactique, l’espace aerien francais est gere par cinqcentres de controle, chaque centre comprenant une ou deux zones de qualification sur lesquelsles controleurs aeriens (”aiguilleurs du ciel”) sont sp´ecifiquement qualifies a exercer leur metier.
L’espace de chaque zone de qualification est decoupe ensecteurselementaires, places sousla responsabilite de controleurs aeriens qui donnent des instructions de cap ou de changement deniveau de vol aux avions evoluant dans leur secteur, afin d’´eviter les collisions.
Sur une position de controle, on trouve generalement deux controleurs travaillant en etroitecollaboration. Un controleur ”radar” est charge de detecter les conflits a partir des plans de vol etdes informations radar affichees sur son ecran, et de les r´esoudre en donnant des instructions parradio aux avions. Un deuxieme controleur est charge de lacoordination des vols avec les secteursadjacents, et de la pre-detection des conflits potentiels.
En fonction du trafic, plusieurs secteurs elementaires peuvent etre regroupes sur une memeposition de controle, pour former ce qu’on appelle unsecteur de controle.
Lorsque la charge de travail diminue, la configuration de la salle de controle est modifiee defacon a regrouper des secteurs. Quand au contraire la charge augmente, le chef de salle prend ladecision de ”degrouper” les secteurs surcharges, quandc’est possible.
Quand le secteur surcharge est un secteur elementaire (et qu’on ne peut donc pas le ”degrouper”)ou quand il n’y a pas suffisamment de controleurs presents pour pouvoir ”degrouper”, des me-sures de regulation du trafic sont prises, en deroutant certains vols ou en retardant leur decollage.
Cette regulation est effectuee par les FMP (Flow management positions) situees dans chaquecentre de controle, et par la CFMU (Central Flow ManagementUnit), organisme central situe aBruxelles. Comme il est utile d’anticiper les situations desurcharge, un plan de pre-regulationest mis en oeuvre deux a trois jours avant le jour J. Pour elaborer ce plan de regulation, les FMPet la CFMU definissent des capacites secteurs, c’est-a-dire un seuil maximum sur le nombred’avions qui peuvent entre dans un secteur donne dans un laps de temps choisi. En fonction dutour de service des controleurs, les operateurs FMP etablissent egalement un schema previsionneld’ouverture des secteurs, qui leur sert a anticiper d’eventuelles surcharges.
L’ensemble du systeme de gestion du trafic aerien est reglemente, gere et developpe pardiverses organisations internationales ou nationales. Lasection suivante presente les principalesorganisations operant dans le contexte europeen et franc¸ais.
I.4 Organisations
OACI : l’Organisation de l’Aviation Civile Internationale est une organisation qui depend desNations unies, creee en novembre 1944 par 55 pays selon la convention de Chicago a cause dubesoin d’une standardisation internationale plus forte des services au sol d’assistance des avions.
Elle devient officielle en 1947 apres ratification par la plupart des pays du monde, puis estincorporee a l’ONU en tant qu’organisation specialisee. Son siege est a Montreal. Pour l’instant,elle comporte 189 etats membres.
6
LE CONTROLE AERIEN I.4. ORGANISATIONS
Les domaines d’intervention de la plus importante organisation mondiale intergouvernemen-tale sont juridiques, economiques et techniques : l’aspect juridique porte sur une reglementationinternationale concernant les avions, les transporteurs et les passagers ; d’un point de vue economique,l’OACI entreprend des etudes et fournit aux Etats des manuels sur les previsions de trafic et surles tarifs ; son action technique concerne les regles de l’Air, les Telecommunications aeronautiqueset les services de la circulation aerienne.
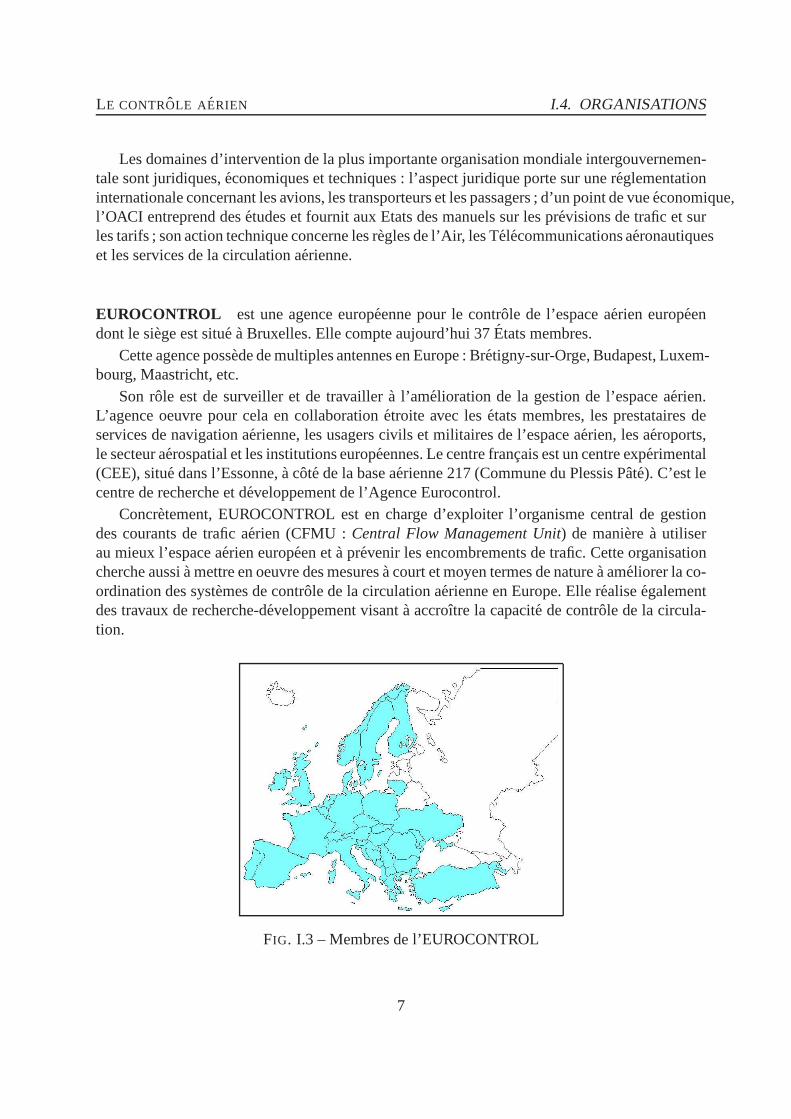
EUROCONTROL est une agence europeenne pour le controle de l’espace aerien europeendont le siege est situe a Bruxelles. Elle compte aujourd’hui 37Etats membres.
Cette agence possede de multiples antennes en Europe : Bretigny-sur-Orge, Budapest, Luxem-bourg, Maastricht, etc.
Son role est de surveiller et de travailler a l’amelioration de la gestion de l’espace aerien.L’agence oeuvre pour cela en collaboration etroite avec les etats membres, les prestataires deservices de navigation aerienne, les usagers civils et militaires de l’espace aerien, les aeroports,le secteur aerospatial et les institutions europeennes.Le centre francais est un centre experimental(CEE), situe dans l’Essonne, a cote de la base aerienne217 (Commune du Plessis Pate). C’est lecentre de recherche et developpement de l’Agence Eurocontrol.
Concretement, EUROCONTROL est en charge d’exploiter l’organisme central de gestiondes courants de trafic aerien (CFMU :Central Flow Management Unit) de maniere a utiliserau mieux l’espace aerien europeen et a prevenir les encombrements de trafic. Cette organisationcherche aussi a mettre en oeuvre des mesures a court et moyen termes de nature a ameliorer la co-ordination des systemes de controle de la circulation aerienne en Europe. Elle realise egalementdes travaux de recherche-developpement visant a accroıtre la capacite de controle de la circula-tion.
FIG. I.3 – Membres de l’EUROCONTROL
7
I.4. ORGANISATIONS LE CONTROLE AERIEN
DGAC : la Direction Generale de l’Aviation Civile est en France l’administration de tutelle ducontrole aerien francais, rattachee au ministere des Transports, de l’Equipement, du Tourisme etde la Mer, dont l’autorite dans le domaine de l’aviation civile prime sur les autres organisations.Les services principaux de cette administration sont directement lies au controle aerien.
La DGAC regroupe l’ensemble des services de l’Etat chargesde reglementer et de superviserla securite aerienne, le transport aerien et les activites de l’aviation civile en general. Elle estnotamment chargee de differentes missions relatives a l’aviation civile, comme :
– 1 : le controle aerien ;– 2 : la qualification des aeronefs ;– 3 : les enquetes en cas de catastrophes aeriennes, par le Bureau d’enquetes et d’analyses
(BEA).– 4 : Acteur de la prevention, la DGAC veille non seulement ala securite des hommes mais
aussi a la preservation de l’environnement, par une luttepermanente contre les nuisancesgenerees par le transport aerien.
DSNA : La Direction des Services de la Navigation Aerienne est le prestataire francais qui,sous l’autorite de la DGAC, est(( charge de fournir les services de la circulation aerienne, decommunication, de navigation et de surveillance afferents ainsi que les services d’informationaeronautique, aux aeronefs evoluant en Circulation Aerienne Generale dans l’espace aerien dontla gestion a ete confiee a la France par l’organisation del’aviation civile internationale et sur lesaerodromes designes par le ministre charge de l’aviation civile.
La DSNA est composee d’un etat-major , d’une direction desoperations (DO) qui gere no-tamment les cinq centres de controle en route francais, etd’une direction technique : la DTI.
La DTI comprend deux sous-directions :– une sous-direction des services operationnels (SDSO), chargee du developpement, du deploiement,
et de la maintenance technique des differents systemes (traitement radar, traitement desplans de vol, supervision, radio, etc) utilises sur les sites operationnels du controle aerien,
– une sous-direction des etudes et de la recherche appliqu´ee (SDER) chargee , dans uncontexte europeen, d’imaginer, de concevoir, et de promouvoir le futur systeme de controledu trafic aerien.
La DTI est implantee sur 4 sites :– 1 : Toulouse(( La Mounede)) : Ce site regroupe la direction de la DTI et l’ensemble de la
SDSO (exceptee l’antenne region parisienne).– 2 : Toulouse(( Rangueil)) : Ce site accueille une partie des 4 departements de la SDER,
ainsi que les laboratoires de recherche.– 3 : Athis-Mons : Ce site accueille l’autre partie des 4 departements de la SDER.– 4 : Orly : Ce site accueille l’antenne region parisienne dela SDSO.La DTI vient d’etre reorganisee au 1er fevrier 2007 en plusieurs domaines, auquels se rajoute
un secretariat general pour la gestion administrative :– Recherche & developpement (R&D),– Exigences operationnelles des systemes (EOS),– Systeme de gestion du trafic (ATM),
8
LE CONTROLE AERIEN I.4. ORGANISATIONS
– Systemes de communication, navigation, et surveillance(CNS),– Deploiement et support operationnel (DSO)
9
Chapitre II
Contexte du stage de Master
II.1 Cadre du stage
Mon stage de Master s’est deroule au Laboratoire d’Optimisation Globale (LOG) appliqueeau trafic aerien, sur le campus de l’Ecole Nationale de l’Aviation Civile (ENAC), a Toulouse,dans le complexe scientifique de Rangueil. Le campus de l’ENAC accueille egalement le siteToulouse Rangueil de la DTI/SDER.
Le LOG etudie les problematiques lies a la gestion du trafic aerien, en s’appuyant entreautres sur des methodes d’optimisation stochastiques ou des techniques de programmation parcontraintes, Les membres du laboratoire dependent soit del’ Ecole Nationale de l’Aviation Civile(ENAC), soit de la Sous-Direction desEtudes et de la Recherche de la Direction de la techniqueet de l’innovation (DSNA/DTI-SDER).
La SDER (Sous Direction desEtudes et de la Recherche appliquee) est chargee, dans uncontexte europeen, d’imaginer, de concevoir et de promouvoir le futur systeme de controle dutrafic aerien.
La SDER mene des etudes, recherches et experimentationsdans les domaines suivants :– 1 : La securite du trafic aerien– 2 : La modelisation des flux et performance du systeme– 3 : Les futurs concepts de gestion du trafic aerien– 4 : Moyens et methodes de controle aeroports et approches– 5 : Moyens et methodes de controle en-route– 6 : Outils et moyens d’etudes
L’ensemble de ces etudes est supporte par des moyens informatiques importants intercon-nectes entre eux. Les experimentations sont menees a l’aide de puissants systemes de simulation.
Ce service fait partie de la Direction de la Technique et de l’Innovation (DTI) et est rattachea la Direction des Services de la Navigation Aerienne (DSNA), qui depend via la DGAC duMinistere de l’Equipement, des Transports , du Logement, du Tourisme et de la Mer.
Le sujet du stage portait sur l’etude et l’analyse d’indicateurs de complexite du trafic aerien,dans le cadre du projet S2D2 (Sector status and dynamic density) mene en collaboration par le
CHAPITRE II. CONTEXTE DU STAGE DE MASTERII.2. COMPLEXITE DU TRAFIC AERIEN
LOG et le LEEA (Laboratoire d’economie et d’econometriedu transport aerien), egalement situea l’ENAC.
II.2 Complexit e du trafic aerien
II.2.1 Caracteristiques des mesures de complexite
Quels sont les facteurs de complexite du trafic aerien ? Cesdernieres annees, cette questionest devenue de plus en plus importante, avec l’augmentationdu trafic et la saturation du systemede controle aerien. De nombreux indicateurs ont ete proposes pour mesurer la performance de cesysteme et essayer de l’ameliorer.
Le terme decomplexite du trafic aerien fait appel a des concepts et des realites tres divers.Cette complexite peut etre mesuree de differentes manieres, selon l’echelle de temps et les ca-racteres geographiques concernes, et selon l’application envisagee.
Les indicateurs de complexite sont utilises dans plusieurs domaines de la gestion du tra-fic aerien, avec differentes echelles geographiques ettemporelles. Par exemple, des indicateursrepresentant des valeurs moyennes a l’echelle d’un centre de controle et d’une journee de traficsont utilises pour la comparaison entre plusieurs fournisseurs de services du controle aerien ([3],[4], [5]).
Dans d’autres etudes, la complexite du trafic est envisag´ee en relation avec la charge de travailen temps reel du controleur. Des indicateurs plus fins, comme par exemple le nombre d’avionspresents dans le secteur et les conflits potentiels entre avions a l’instantt, sont alors utilises.
Il n’y a donc pas de mesure universelle de la complexite et tout que nous pouvons prevoir estun ensemble de mesures de complexite, utile et approprie seulement dans un contexte particulieret pour un but particulier. Par consequent, il est crucial d’evaluer la pertinence de la metriquechoisie avec l’objectif final.
II.2.2 Evaluation des indicateurs
Un grand nombre de metriques de complexite ont ete proposees dans des publications surl’ATM ( Air Traffic Management). Les publications [6] and [7] font une revue de litterature sur cesujet. Ces indicateurs peuvent etre plus ou moins abstraits, plus ou moins pertinents, et chacun nerepresente jamais qu’une vision partielle du trafic. Les associer permet de mieux rendre comptede la complexite du trafic. C’est leur combinaison (souventlineaire, dans les etudes passees) quiest designee sous le terme densite dynamique dans certaines etudes ([8] par exemple).
Pour evaluer la pertinence des indicateurs de complexite, on cherche le plus souvent a maxi-miser la correlation des indicateurs (lesvariables explicatives) avec une ou plusieurs autres va-riables (on parle devariable dependante), supposees representer la charge de travail reelle ducontroleur.
Plusieurs methodes ont ete essayees : regression lin´eaire ([8]) ou logistique ([9]), analyse deseries temporelles ([10]), reseaux de neurones ([11]).
11
II.3. PROJET S2D2 CHAPITRE II. CONTEXTE DU STAGE DE MASTER
Quelle que soit la methode, le choix de la variable qui quantifie la charge de travail reelle esttres important. Plusieurs variables ont ete utiliseesdans les etudes passees : l’activite physiolo-gique ([12], [13]) ou physique ([14],[10]), des modeles desimulation des activites du controleur([15],[16]), ou encore des notes subjectives ([8], [11], [9]) ou la charge de travail est estimee parles controleurs aeriens lors de simulations ou sur du trafic reel, eventuellement rejoue.
Ces donnees presentent un inconvenient, en dehors du bruit et des biais qu’elles peuventpresenter. Elles sont difficiles a collecter et demandentdes experimentations lourdes, generalementavec la participation active des controleurs aeriens. Les bases de donnees obtenues sont generalementde petite taille, ce qui peut fausser l’analyse statistiquede ces donnees.
II.3 Projet S2D2
II.3.1 Objectifs du projet
Comme nous venons de le voir, depuis quelques annees la croissance du trafic aerien a mo-tive de nombreuses recherches pour modeliser la charge dutravail des controleurs confrontes adiverses configurations de trafic, et ce autant a la NASA qu’`a EUROCONTROL, et bien sur a laSDER.
Le projet S2D2, en collaboration entre le LEEA et le LOG, cherche a degager d’eventuellescorrelations entre l’etat de regroupement des secteurs aeriens sur les positions de controle et uncertain nombre d’indicateurs, basiques (nombre d’avions,flux entrants), ou plus evolues, qui seveulent representatifs de la complexite du trafic dans un secteur.
L’objectif a plus long terme est d’utiliser certains indicateurs de complexite dans la previsiondes schemas d’ouvertures de secteurs. Dans la methode de travail actuelle des FMP1 et de laCFMU2, on considere qu’une equipe de controleurs ne peut accepter dans son secteur plus d’uncertain nombre d’avions pendant une periode donnee (une heure par exemple). Ce nombre definitla capacite du secteur. Cette capacite est differente pour chaque secteur de controle.
Des travaux effectues au LOG ([17], [18], [19]) montrent que ces indicateurs (flux entrantdans le secteur) et ces seuils (capacites) ne permettent pas de faire une prevision realiste duschema d’ouverture des secteurs. Ils ne representent passuffisamment la charge de travail ducontroleur. Ainsi, les schemas d’ouvertures (les configurations de secteurs prevues pour le joursuivant ou celui d’apres) ne sont pas construits sur une mesure objective de la charge de travail.Pour les construire, les operateurs FMP s’appuient sur leur experience de situations comparablesqu’ils ont rencontres dans le passe.
Un des objectifs principaux du projet S2D2 est de determiner quels sont les indicateurs perti-nents dans ce cadre, afin de pouvoir construire un schema pr´evisionnel sur des bases objectives.
1FMP (Flow Management Position) : dans chaque centre de controle, une cellule FMP travaille, en collaborationavec la CFMU, a la regulation des flux de trafic
2CFMU (Central Flow Management Unit: organisme europeen dont le but est de s’assurer que le trafic n’excedepas les capacites, en retardant le decollage de certains avions ou en leur faisant emprunter des routes alternatives.
12
CHAPITRE II. CONTEXTE DU STAGE DE MASTER II.3. PROJET S2D2
II.3.2 Relation entre la complexite du trafic aerien et la configuration dessecteurs aeriens
Comme nous l’avons decrit dans le chapitre precedent, l’espace aerien est partages ensec-teurs elementaires. Selon la charge de trafic, plusieurs secteurs elementaires peuvent etre re-groupes pour former un secteur plus large affecte a une position de controle geree par deuxcontroleurs travaillant ensemble.
Dans la suite, le termesecteur de controle, ou tout simplementsecteur, designera un groupede secteurs elementaires, eventuellement reduit a un, affectes a une position de controle. Onappelleconfiguration de secteursl’affectation des secteurs elementaires sur l’ensembledes po-sitions de controle.
Si le trafic augmente dans un secteur de controle, le chef de salle peut choisir de le ”degrouper”en ouvrant une autre position de controle a laquelle il affecte une partie des secteurs elementairesdu secteur initial. A l’inverse, quand le trafic diminue dansplusieurs secteurs voisins, il peut lesregrouper en un secteur plus large.
Le projet S2D2 fait l’hypothese que les decisions de regroupement ou de ”degroupement” desecteurs sont statistiquement significatives de la charge du controleur, tout en gardant a l’espritles biais possibles (ouvertures de secteurs a des fins de formation, releve des equipes, incidentstechniques,...). Il est propose d’utiliser l’etat de regroupement (regroupe, ouvert, ou”d egroupe” )comme variable dependante pour caracteriser la charge detravail du controleur.
Ainsi, si nous pouvons predire precisement l’etat de regroupement des secteurs en fonctionde certains indicateurs specifiques de complexite, il sera eventuellement possible de faire uneprevision realiste et objective des schemas d’ouverture des secteurs.
II.3.3 Demarche et resultats du projet
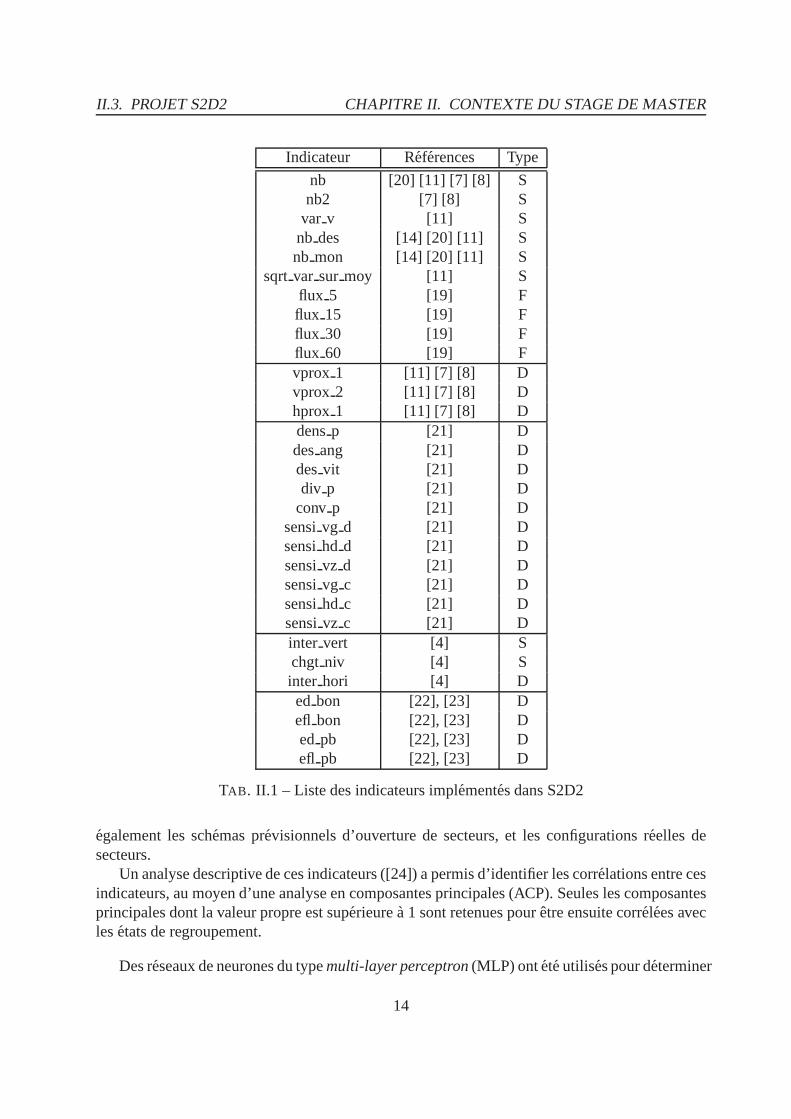
La tableau II.1 liste les28 indicateurs testes jusqu’a present dans le projet S2D2,auquel ilfaut rajouter le volumeV du secteur, qui est un indicateur statique.
Ces indicateurs de complexite ont ete implantes dans une librairie ecrite en langage OCaml.Selon la facon dont ils sont calcules, on peut distinguer trois categories :
– 1 : Les indicateurs ”simples” : ces indicateurs sont calcules en parcourant l’ensemble desavions actifs.Pour chaque avion, une ou plusieurs variables sont evaluees. Les valeurs obtenues sontensuite agregees pour donner la valeur de l’indicateur considere.
– 2 : Les indicateurs ”doubles” : ces indicateurs sont calcules en parcourant l’ensemble despaires de l’ensemble des avions actifs. Pour chaque couple d’avions, une ou plusieursvariables sont calculees. Les valeurs obtenues sont ensuite agregees (en deux etapes suc-cessives) pour donner la valeur de l’indicateur.
– 3 : Les flux entrants : nombres d’avions dont l’arrivee dansle secteur se fera dans un lapsde temps determine (et parametrable).
Ces indicateurs sont calcules a partir d’archives de donnees radar (systeme IMAGE) et dedonnees du systeme COURAGE pour la description des secteurs. Le systeme COURAGE archive
13
II.3. PROJET S2D2 CHAPITRE II. CONTEXTE DU STAGE DE MASTER
Indicateur References Type
nb [20] [11] [7] [8] Snb2 [7] [8] S
var v [11] Snb des [14] [20] [11] Snb mon [14] [20] [11] S
sqrt var sur moy [11] Sflux 5 [19] Fflux 15 [19] Fflux 30 [19] Fflux 60 [19] Fvprox 1 [11] [7] [8] Dvprox 2 [11] [7] [8] Dhprox 1 [11] [7] [8] Ddensp [21] Ddesang [21] Ddesvit [21] Ddiv p [21] D
conv p [21] Dsensivg d [21] Dsensihd d [21] Dsensivz d [21] Dsensivg c [21] Dsensihd c [21] Dsensivz c [21] Dinter vert [4] Schgt niv [4] Sinter hori [4] Ded bon [22], [23] Defl bon [22], [23] Ded pb [22], [23] Defl pb [22], [23] D
TAB. II.1 – Liste des indicateurs implementes dans S2D2
egalement les schemas previsionnels d’ouverture de secteurs, et les configurations reelles desecteurs.
Un analyse descriptive de ces indicateurs ([24]) a permis d’identifier les correlations entre cesindicateurs, au moyen d’une analyse en composantes principales (ACP). Seules les composantesprincipales dont la valeur propre est superieure a 1 sont retenues pour etre ensuite correlees avecles etats de regroupement.
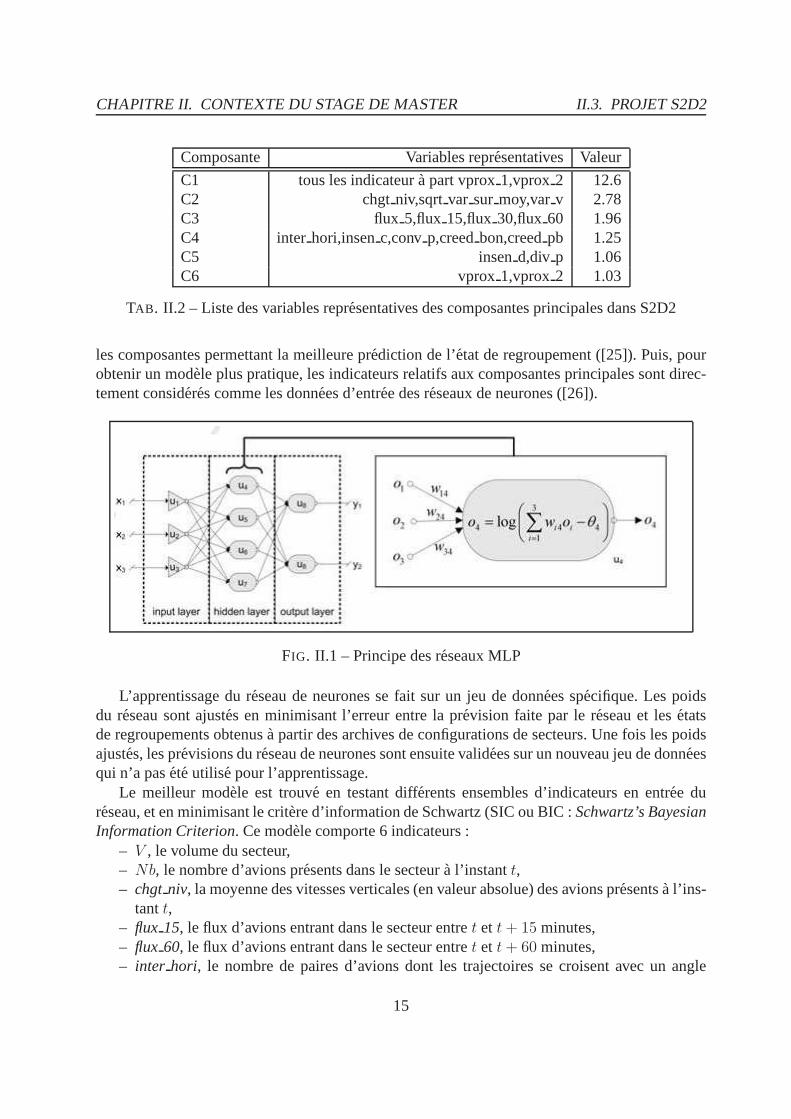
Des reseaux de neurones du typemulti-layer perceptron(MLP) ont ete utilises pour determiner
14
CHAPITRE II. CONTEXTE DU STAGE DE MASTER II.3. PROJET S2D2
Composante Variables representativesValeur
C1 tous les indicateur a part vprox1,vprox 2 12.6C2 chgt niv,sqrt var sur moy,varv 2.78C3 flux 5,flux 15,flux 30,flux 60 1.96C4 inter hori,insenc,convp,creedbon,creedpb 1.25C5 insend,div p 1.06C6 vprox 1,vprox 2 1.03
TAB. II.2 – Liste des variables representatives des composantes principales dans S2D2
les composantes permettant la meilleure prediction de l’´etat de regroupement ([25]). Puis, pourobtenir un modele plus pratique, les indicateurs relatifsaux composantes principales sont direc-tement consideres comme les donnees d’entree des reseaux de neurones ([26]).
FIG. II.1 – Principe des reseaux MLP
L’apprentissage du reseau de neurones se fait sur un jeu de donnees specifique. Les poidsdu reseau sont ajustes en minimisant l’erreur entre la pr´evision faite par le reseau et les etatsde regroupements obtenus a partir des archives de configurations de secteurs. Une fois les poidsajustes, les previsions du reseau de neurones sont ensuite validees sur un nouveau jeu de donneesqui n’a pas ete utilise pour l’apprentissage.
Le meilleur modele est trouve en testant differents ensembles d’indicateurs en entree dureseau, et en minimisant le critere d’information de Schwartz (SIC ou BIC :Schwartz’s BayesianInformation Criterion. Ce modele comporte 6 indicateurs :
– V , le volume du secteur,– Nb, le nombre d’avions presents dans le secteur a l’instantt,– chgt niv, la moyenne des vitesses verticales (en valeur absolue) desavions presents a l’ins-
tantt,– flux 15, le flux d’avions entrant dans le secteur entret et t + 15 minutes,– flux 60, le flux d’avions entrant dans le secteur entret et t + 60 minutes,– inter hori, le nombre de paires d’avions dont les trajectoires se croisent avec un angle
15
II.4. QUELQUES QUESTIONS OUVERTESCHAPITRE II. CONTEXTE DU STAGE DE MASTER
superieur a20 degres.
II.4 Quelques questions ouvertes
Bien que deja interessants, les resultats obtenus dansle projet S2D2 peuvent sans doute en-core etre ameliores. On peut par exemple remettre en question le choix initial des 28 indicateursqui ont ete testes, et essayer d’autres indicateurs qui pourraient donner de meilleurs resultats.
Par exemple, on sait que le controle du trafic dans un secteurest plus complexe quand deszones militaires actives occupent une partie du volume du secteur. Plutot que d’utiliser le vo-lume total du secteur, il serait interessant de calculer levolume utile disponible en fonction desactivations de zones militaires.
Par ailleurs, vu la nature de nos donnees, avec seulement trois etats (regroupe, ouvert, ou”d egroupe” ) pour caracteriser la charge de travail et savoir si elle est faible, normale, ou tropforte, on peut se demander si certains des indicateurs utilises ne sont pas trop sophistiques.Aurait-on pu se contenter d’indicateurs plus simples ?
Par exemple, nous calculons a chaque minute la moyenne des vitesses verticales des avionspresents dans le secteur (indicateurchgt niv). Pourrait-on le remplacer par un indicateur sta-tique caracterisant le type de trafic evoluant generalement dans le secteur : stable en altitude, ouevolutif, ou mixte, par exemple ?
La meme question se pose pour le nombre de paires d’avions secroisant avec un anglesuperieur a 20 degres (inter hori). Si le fait que les routes soient paralleles ou se croisentestune caracteristique constante pour un secteur donne, on pourrait se contenter d’un indicateurstatique.
L’avantage ce ces indicateurs plus simples serait d’avoir une prevision plus robuste des etatsde regroupements, quand on voudra faire cette prevision deux jours avant le jour J ou le traficentre dans le secteur.
Ces questions ouvertes sur le choix des indicateurs font l’objet du travail presente dans cerapport. Le prochain chapitre traite du calcul du volume utile du secteur, et le suivant cherche acaracteriser les secteurs en fonction des valeurs des indicateurschgt niv et inter hori.
16
Chapitre III
Calcul du volume utile d’un secteur aerien
III.1 Description g eographique des secteurs
L’espace aerien est decoupe ensecteurselementairesqui peuvent etre regroupes ensecteursde controle, pour etre geres par les controleurs aeriens. Tous lesregroupements ne sont pasoperationnellement valables. En general, sauf cas tres exceptionnel, on ne regroupe pas deuxsecteurs qui ne sont pas adjacents, par exemple.
Les donnees de description des secteurs et des centres de controle proviennent des archivesdu systeme COURAGE.
Les donnees “centres” decrivent en fait les zones de qualification, et non les centres decontrole. Il peut y avoir plusieurs zones de qualification dans un meme centre. Voici par exemplequelques lignes extraites du fichiercentresdu 15/05/2003, decrivant la zone de qualification deParis Ouest, avec la liste des secteurs elementaires (ligne S), et les regroupements usuels desecteurs (lignes R) :
C PARIS-OUEST PW 12 24S LN OG OT OY RT TB TE TH TN TP UK UZR APW 5 LN OT RT TH TPR FPW 8 LN OT RT TB TE TH TN TPR HPKZ 5 LN TH TP UK UZR NHK 3 LN TH UKR OGRT 2 OG RT...
Les donnees “secteurs” decrivent les limites geographiques de chaque secteur, dans un referentielcentre sur Paris (48.833o N, 2.333o E). Les coordonnees(x, y) sont dans un plan de projectionstereographique sur une sphere terrestre de rayon 6375 km (cf note provisoire [27]). Les dis-tances dans le plan sont en kilometres. Les secteurs sont des collections de tubes polygonaux (onparle aussi de sous-secteurs) dont les plancher et plafond sont donnes en niveaux de vol1 (FL,
1niveau de vol : c’est l’altitude-pression par rapport a l’isobare 1013 hPa, exprimee en pieds et divisee par 100.
III.2. PRESENTATION DE LA DEMARCHE CALCUL DU VOLUME UTILE
pourFlight Level).A titre d’exemple, le secteur TP de Paris, qui va du FL55 au FL265 (ligne S), est compose de
plusieurs sous-secteurs, dont le premier est entre les niveaux FL55 et FL145 (cf premiere ligneD), le suivant entre les FL145 et FL195, et ainsi de suite. Chaque ligne commencant par un Pdonne les coordonneesx ety, en kilometres, d’un point du polygone d’un sous-secteur.
S TP PARI F0061 Terminale Pontoise 00550265 04D 0055 0145 07E -65 74P -108 32P -76 111P -52 111P -47 106P 2 37P -77 28P -91 30D 0145 0195 12E -157 76P -187 40P -187 51P -184 133P -159 147...
Les zones militaires sont decrites de la meme facon que les secteurs aeriens civils. Elles sontdefinies dans certaines parties de l’espace aerien, en recouvrement avec les secteurs de controlecivil. Generalement, une zone militaire empiete partiellement sur l’espace de plusieurs secteurscivils.
III.2 Pr esentation de la demarche
Quand une zone militaire est activee, la circulation du trafic civil a l’interieur du volume dela zone est soit interdite, soit soumise a une autorisationprealable pour chaque vol traversant lazone. Le travail du controleur est donc plus complexe lorsqu’une zone militaire est activee dansson secteur de controle. En effet, il a moins d’espace pour manœuvrer les avions afin de resoudreles conflits, et il doit eventuellement coordonner certains vols avec les organismes militaires.
Jusqu’a present, seul le volume total des secteurs de controle a ete utilise dans le projet S2D2(cf [24], [25] et [26]) Cet indicateur est statique et reste constant lorsque les zones militaires sontactivees.
Le but du travail presente dans ce chapitre est de calculerle volume utile de chaque secteurde controle, en soustrayant le volume des zones militairesqui occupent une partie de l’espace du
Un avion volant au FL 190 est a 19000 pieds au dessus de l’isobare 1013 hPa.
18
CALCUL DU VOLUME UTILE III.3. CLIPPING DE POLYGONES
secteur quand elles sont actives. L’utilite de ce nouvel indicateur pourra par la suite etre evalueeen l’utilisant en entree du reseau de neurones qui prevoit l’etat de regroupement du secteur, et enregardant s’il donne de meilleures previsions que le volume total.
Pour calculer le volume utile, il faut examiner les intersections de chacun des sous-secteurscomposant le secteur, avec les tubes de section polygonale composant la zone militaire.
Quand un sous-secteur et une ”sous-zone” sont secants verticalement, il faut calculer la sur-face du polygone qui n’est pas masquee par la zone militaire. Le volume utile est obtenu enmultipliant cette surface par le nombre de niveaux de vol en commun.
Il nous faut donc un algorithme permettant de calculer cettesurface. Cet algorithme doitetre implante en langage Ocaml, qui est le langage utilis´e dans le projet S2D2 pour calculer lesindicateurs de complexite du trafic.
Dans la section III.3, nous introduisons leclipping de polygones, qui permet de calculerle (ou les) polygone(s) restant(s), une fois la zone militaire activee. Le principe de l’algorithmeque nous avons implante est decrit dans la section III.4. Dans la section III.5, nous proposons unestructure de donnees pour notre probleme. La section III.6 precise les trois phases de l’algorithmeen donnant leurs pseudo-codes. Le traitement des cas particuliers est aborde dans la section III.7.Enfin, les resultats de l’algorithme sont presentes en section III.8, et la derniere section conclutle chapitre et donne les perspectives d’utilisation de notre travail.
III.3 Clipping de polygones
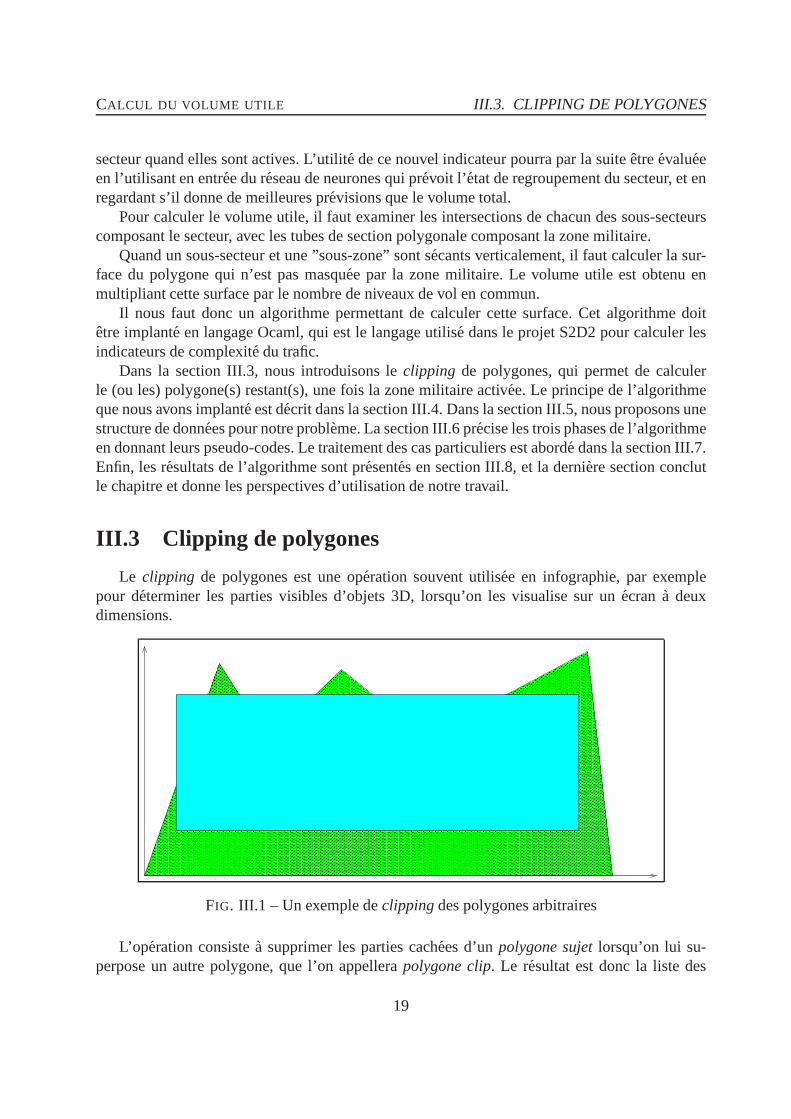
Le clipping de polygones est une operation souvent utilisee en infographie, par exemplepour determiner les parties visibles d’objets 3D, lorsqu’on les visualise sur un ecran a deuxdimensions.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FIG. III.1 – Un exemple declippingdes polygones arbitraires
L’operation consiste a supprimer les parties cachees d’un polygone sujetlorsqu’on lui su-perpose un autre polygone, que l’on appellerapolygone clip. Le resultat est donc la liste des
19
III.3. CLIPPING DE POLYGONES CALCUL DU VOLUME UTILE
polygones representant les parties du polygonesujetqui debordent du polygoneclip. La figureIII.1 montre un exemple avec un polygoneclip rectangulaire.
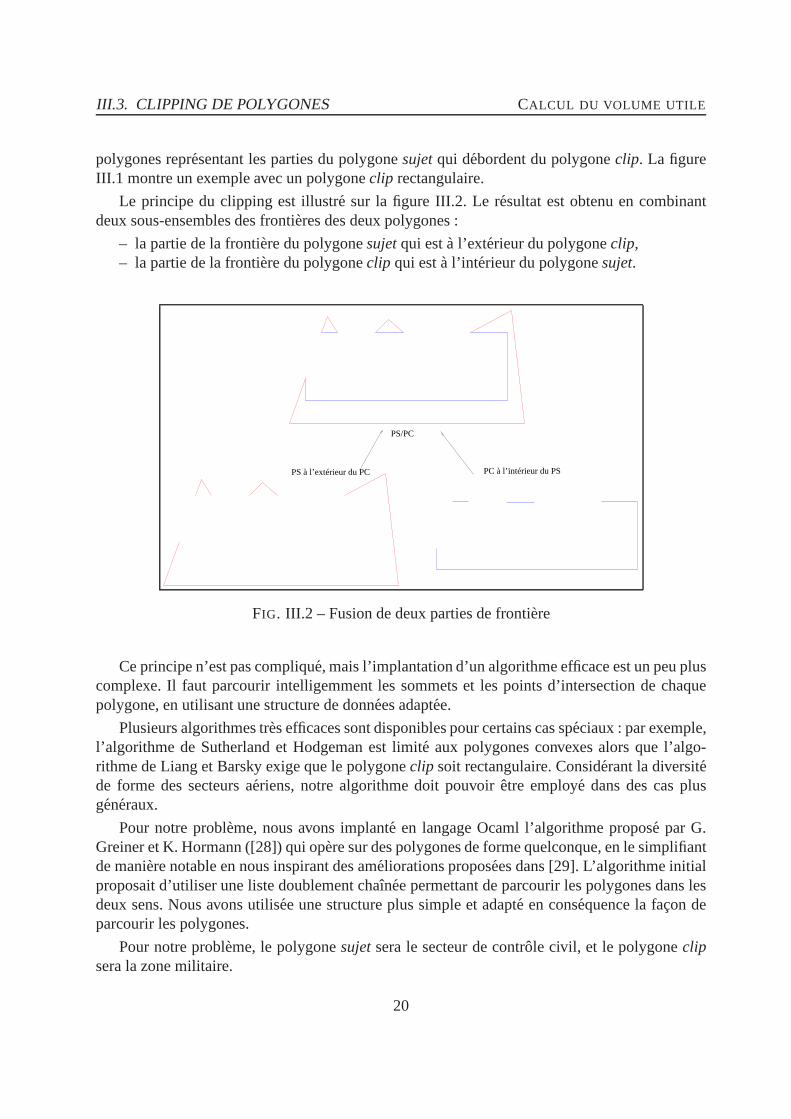
Le principe du clipping est illustre sur la figure III.2. Le resultat est obtenu en combinantdeux sous-ensembles des frontieres des deux polygones :
– la partie de la frontiere du polygonesujetqui est a l’exterieur du polygoneclip,– la partie de la frontiere du polygoneclip qui est a l’interieur du polygonesujet.
PS à l’extérieur du PC PC à l’intérieur du PS
PS/PC
FIG. III.2 – Fusion de deux parties de frontiere
Ce principe n’est pas complique, mais l’implantation d’unalgorithme efficace est un peu pluscomplexe. Il faut parcourir intelligemment les sommets et les points d’intersection de chaquepolygone, en utilisant une structure de donnees adaptee.
Plusieurs algorithmes tres efficaces sont disponibles pour certains cas speciaux : par exemple,l’algorithme de Sutherland et Hodgeman est limite aux polygones convexes alors que l’algo-rithme de Liang et Barsky exige que le polygoneclip soit rectangulaire. Considerant la diversitede forme des secteurs aeriens, notre algorithme doit pouvoir etre employe dans des cas plusgeneraux.
Pour notre probleme, nous avons implante en langage Ocamll’algorithme propose par G.Greiner et K. Hormann ([28]) qui opere sur des polygones de forme quelconque, en le simplifiantde maniere notable en nous inspirant des ameliorations proposees dans [29]. L’algorithme initialproposait d’utiliser une liste doublement chaınee permettant de parcourir les polygones dans lesdeux sens. Nous avons utilisee une structure plus simple etadapte en consequence la facon deparcourir les polygones.
Pour notre probleme, le polygonesujetsera le secteur de controle civil, et le polygoneclipsera la zone militaire.
20
CALCUL DU VOLUME UTILE III.4. PRINCIPE DE L’ALGORITHME
III.4 Principe de l’algorithme
Le clipping de deux polygones quelconques consiste dans un premier temps a rechercher lespoints d’intersections des polygonessujet, que nous appellerons S, etclip, que nous nommeronsC. Ensuite, il nous faut determiner, pour chaque portion depolygone situee entre deux pointsd’intersection, si elle est a l’interieur ou a l’exterieur de l’autre. Enfin, il faut connecter les por-tions du polygone S qui sont a l’exterieur du polygone C avec les portions du polygone C quisont a l’interieur du polygone S, en parcourant les listesde points de chaque polygone.
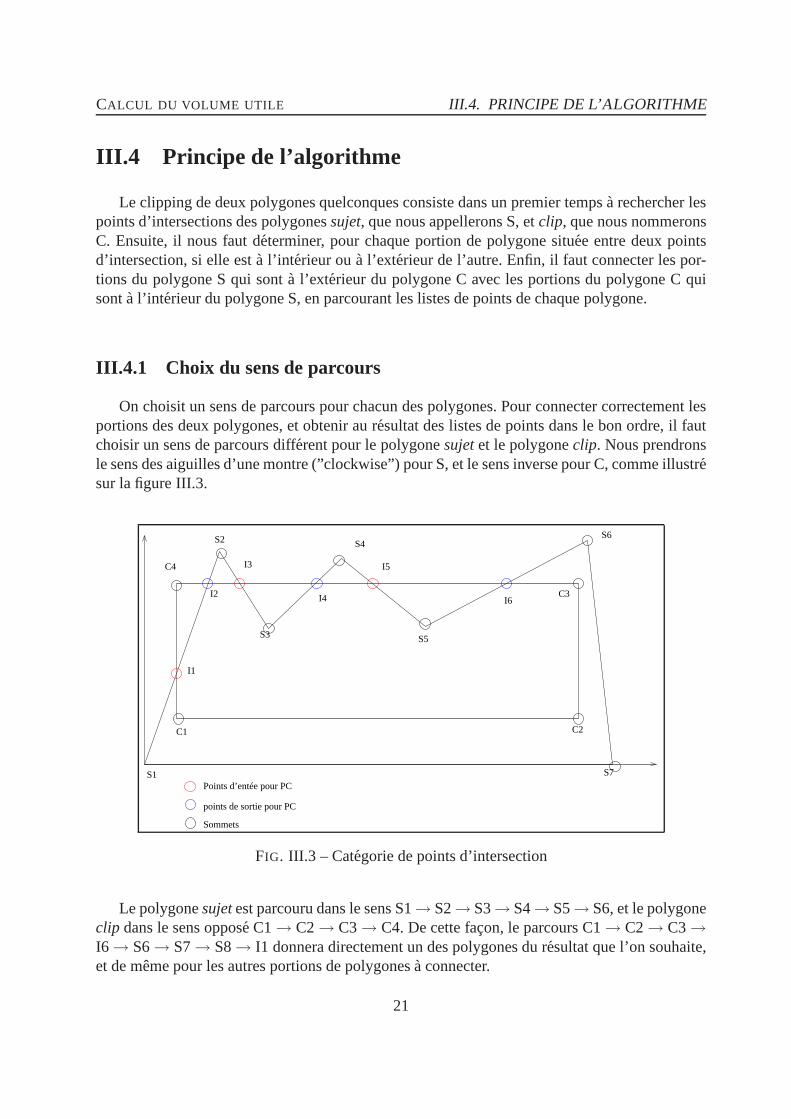
III.4.1 Choix du sens de parcours
On choisit un sens de parcours pour chacun des polygones. Pour connecter correctement lesportions des deux polygones, et obtenir au resultat des listes de points dans le bon ordre, il fautchoisir un sens de parcours different pour le polygonesujetet le polygoneclip. Nous prendronsle sens des aiguilles d’une montre (”clockwise”) pour S, et le sens inverse pour C, comme illustresur la figure III.3.
S1
S2
S3
S4
S5
S6
S7
C1 C2
C3
C4
I1
I2
I3
I4
I5
I6
Points d’entée pour PC
points de sortie pour PC
Sommets
FIG. III.3 – Categorie de points d’intersection
Le polygonesujetest parcouru dans le sens S1→ S2→ S3→ S4→ S5→ S6, et le polygoneclip dans le sens oppose C1→ C2→ C3→ C4. De cette facon, le parcours C1→ C2→ C3→I6 → S6→ S7→ S8→ I1 donnera directement un des polygones du resultat que l’on souhaite,et de meme pour les autres portions de polygones a connecter.
21

III.5. CHOIX DE LA STRUCTURE DE DONNEES CALCUL DU VOLUME UTILE
III.4.2 Statut des points d’intersection
Pour determiner les portions d’un polygone qui sont a l’interieur de l’autre, on le parcourten classant les points d’intersection enpoints entrantsou points sortants, selon que le premierpoint de l’arete sur laquelle est le point d’intersection est a l’exterieur ou a l’interieur de l’autrepolygone. Par exemple I6 est un point sortant lorsqu’on parcourt le polygonesujet, car il est situesur le segment S1S5, et S5 est a l’interieur du polygoneclip et S6 a l’exterieur. Ce meme pointI6 est aussi un point sortant lorsqu’on parcourt le polygoneclip dans le sens inverse.
Le statut des points d’intersection est simple a trouver, puisqu’en les parcourant successi-vement on trouve alternativement un point d’entree et un point de sortie. Il suffit donc de ca-racteriser un seul point d’intersection pour connaıtre l’etat de tous les autres.
En partant par exemple d’un point du polygone sujet situe al’exterieur du polygone clip, lepremier point d’intersection rencontre sera necessairement entrant, et en continuant le parcours,on determine le statut des points suivants.
Plusieurs algorithmes existent pour determiner si un point est a l’interieur ou a l’exterieurd’un polygone. Nous avons utilise celui implante dans la librairie GEOMETRY du LOG, ecriteen Ocaml, dont le principe consiste a compter le nombre d’intersections entre une demi-droitepartant du point considere et le polygone. Ce nombre est pair quand le point est a l’exterieur, etimpair quand il est a l’interieur.
III.5 Choix de la structure de donnees
Notre algorithme a besoin d’une structure de donnees pour la representation des polygones.Dans l’article [28], l’algorithme de Greiner-Hormann utilise une liste doublement chaınee pourpouvoir parcourir les polygones dans les deux sens. Les points d’intersection sont dedoubles, etinseres dans chacun des polygones, tout en etant reliesentre eux par des pointeurs. Cet algorithmeest implante en langage C.
Dans notre programme en Ocaml, nous utilisons des listes chaınees simples, sans dedoublerles points d’intersection.
type liste_modifiable =Empty
|Cell_poly of cell_poly|Cell_inter of cell_inter
and cell_poly ={elt_poly: vertex;
mutable next: liste_modifiable}and cell_inter =
{elt_inter: vertex;mutable alpha: float;mutable next1: liste_modifiable;mutable next2: liste_modifiable}
22
CALCUL DU VOLUME UTILE III.5. CHOIX DE LA STRUCTURE DE DONNEES
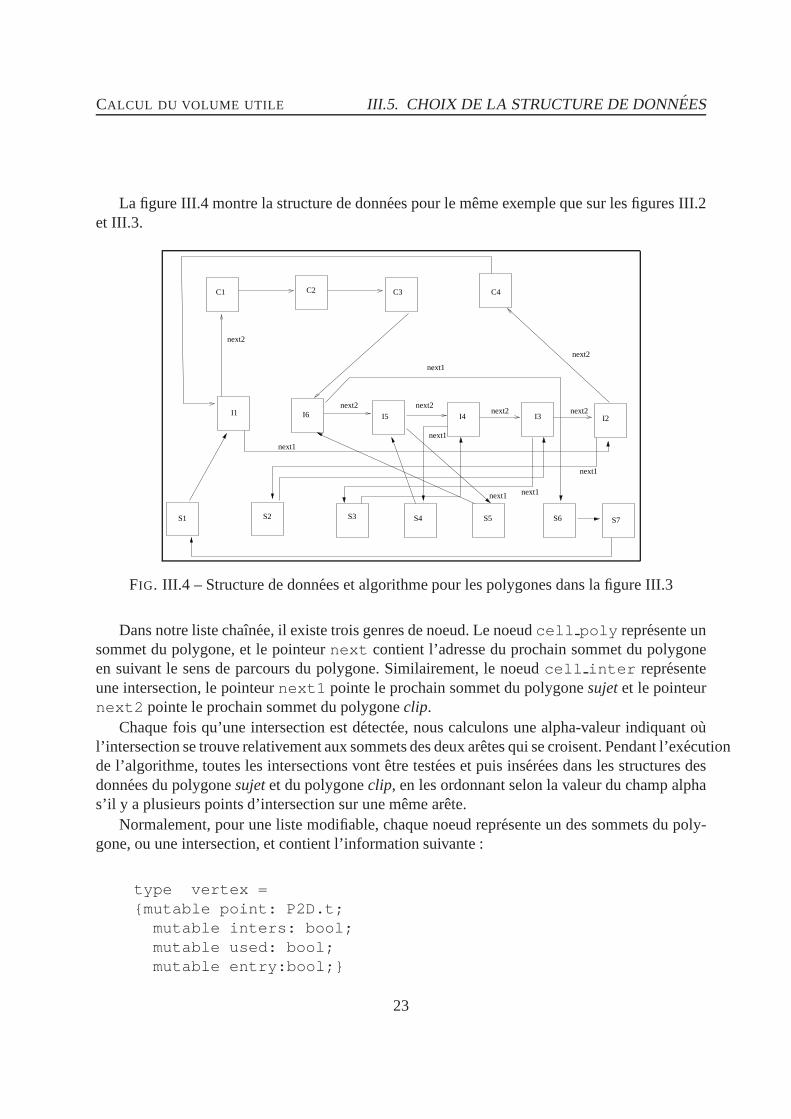
La figure III.4 montre la structure de donnees pour le meme exemple que sur les figures III.2et III.3.
C2C1 C3 C4
next2
next2 next2next2 next2
next2
next1
next1
next1
next1
next1
next1
I6 I5 I4 I3 I2I1
S1 S2 S3 S4 S5 S6 S7
FIG. III.4 – Structure de donnees et algorithme pour les polygones dans la figure III.3
Dans notre liste chaınee, il existe trois genres de noeud.Le noeudcell poly represente unsommet du polygone, et le pointeurnext contient l’adresse du prochain sommet du polygoneen suivant le sens de parcours du polygone. Similairement, le noeudcell inter representeune intersection, le pointeurnext1 pointe le prochain sommet du polygonesujetet le pointeurnext2 pointe le prochain sommet du polygoneclip.
Chaque fois qu’une intersection est detectee, nous calculons une alpha-valeur indiquant oul’intersection se trouve relativement aux sommets des deuxaretes qui se croisent. Pendant l’executionde l’algorithme, toutes les intersections vont etre test´ees et puis inserees dans les structures desdonnees du polygonesujetet du polygoneclip, en les ordonnant selon la valeur du champ alphas’il y a plusieurs points d’intersection sur une meme arete.
Normalement, pour une liste modifiable, chaque noeud represente un des sommets du poly-gone, ou une intersection, et contient l’information suivante :
type vertex ={mutable point: P2D.t;
mutable inters: bool;mutable used: bool;mutable entry:bool;}
23
III.6. DESCRIPTION DETAILL EE CALCUL DU VOLUME UTILE
Ici, nous utilisons le champpoint pour stocker les coordonnees, le champinterspour testersi ce point est une intersection, le champusedcomme un drapeau d’utilisation, et le champentrypour memoriser si ce point est entrant quand il est une intersection.
III.6 Description d etaillee
Pour notre algorithme, nous avons trois phases :
1. rechercher toutes les intersections entre chaque aretedu polygone S et chaque arete dupolygone C,
2. classer chaque point d’intersection dans la categoriepoint entrantoupoint sortant,
3. effectuer les parcours de polygones pour rendre le resultat final.
III.6.1 Phase 1 : Calculer toutes les intersections
Dans la premiere phase, nous devons calculer tous les points d’intersection entre chaque aretedu polygone S et chaque arete du polygone C. Avant le calcul,il est imperatif de s’assurer qu’onn’est pas dans un cas particulier. Les deux polygones doivent etre secants et il ne doit pas y avoirde sommets d’un polygone sur la frontiere de l’autre polygone.
Quand nous calculons les coordonnees d’intersection, deux alpha-valeurs entre 0 et 1 sontcalculees en meme temps. Elles indiquent la position d’intersection relativement au debut dechaque arete. Ensuite, selon les alpha-valeurs, nous ins´erons l’intersection dans les structures dedonnees des polygones S et C.
Pseudo-code de la phase 1 :
for each vertex Si of ps(Subject Polygon) dofor each vertex Cj of pc(clip polygon) doif inter_seg (Si,Si+1,Cj,Cj+1) then
Calculate t=alpha_SubjectCalculate s=alpha_ClipCalculate p=intersectioninsert(t,p,ps)insert(s,p,pc)
end ifend for
end for
III.6.2 Phase 2 : Definir le statut des points d’intersection
Grace a l’alternance de la categorie d’intersection, quand nous effectuons les parcours dansles polygones, nous pouvons commencer a partir du premier point d’intersection et continuer en
24

CALCUL DU VOLUME UTILE III.6. DESCRIPTION DETAILL EE
utilisant cette regle pour detecter que les autres pointsse trouvent a l’interieur de l’autre polygoneou pas.
Pseudo-code de phase 2 :
for both polygons ps/pc doif P0 inside other polygonIntersection.status = exit
elseIntersection.status = entry
end iffor each intersection Ii doIi.status = Opposite of Ii-1.status
end forend for
III.6.3 Phase 3 : Former les nouveaux polygones
Dans la phase 3, nous calculons le resultat final qui est une liste de polygones obtenue enselectionnant les points a retenir dans les structures dedonnees des deux polygones. Les pointssont filtres en fonction du statut des points d’intersection qu’on rencontre en parcourant les struc-tures de donnees.
Il est obligatoire de s’assurer que le sens des deux polygones est different, sinon, nous nepouvons pas filtrer les resultats qui nous interessent. Dans le programme, nous utilisons un va-riable, ici appeleecurrent, pour bien suivre tout le processus du filtrage et conserver le pointcourant du parcours.
On ne retient que les points des polygones S et C qui sont entredeux points d’intersectionsuccessifs, qui ont le statut sortant pour le premier, et entrant pour le deuxieme, lorsqu’on par-court S. Sur l’exemple de la figure III.3, entre I1 et I2 on retiendra la portion I1-I2 du polygoneS et la portion I2-C4-I1 de C.
Comme le premier point dans chaque structure de donnee est un point du polygone, et pas unpoint d’intersection, il faut memoriser le nombre des points d’intersections qui n’ont pas encoreete visites. S’il reste des points d’intersection qui nesont pas visites, il faut continuer le parcours.
Pseudo-code de phase 3 :
form Polygons(ps,pc)while cal_point( the number unprocessed intersecting points inSubject Polygon)>0 do
current = a unprocessed intersecting exit point of PSstart a new Polygonrepeatif current->exit point
repeatcurrent = current->next1(ps)
25
III.7. CAS PARTICULIERS CALCUL DU VOLUME UTILE
until current->intersectionelse(entry point)
repeatcurrent = current->next2(pc)
until current->intersectionend if
until PolygonClosedend whileOutput all Polygons
III.7 Cas particuliers
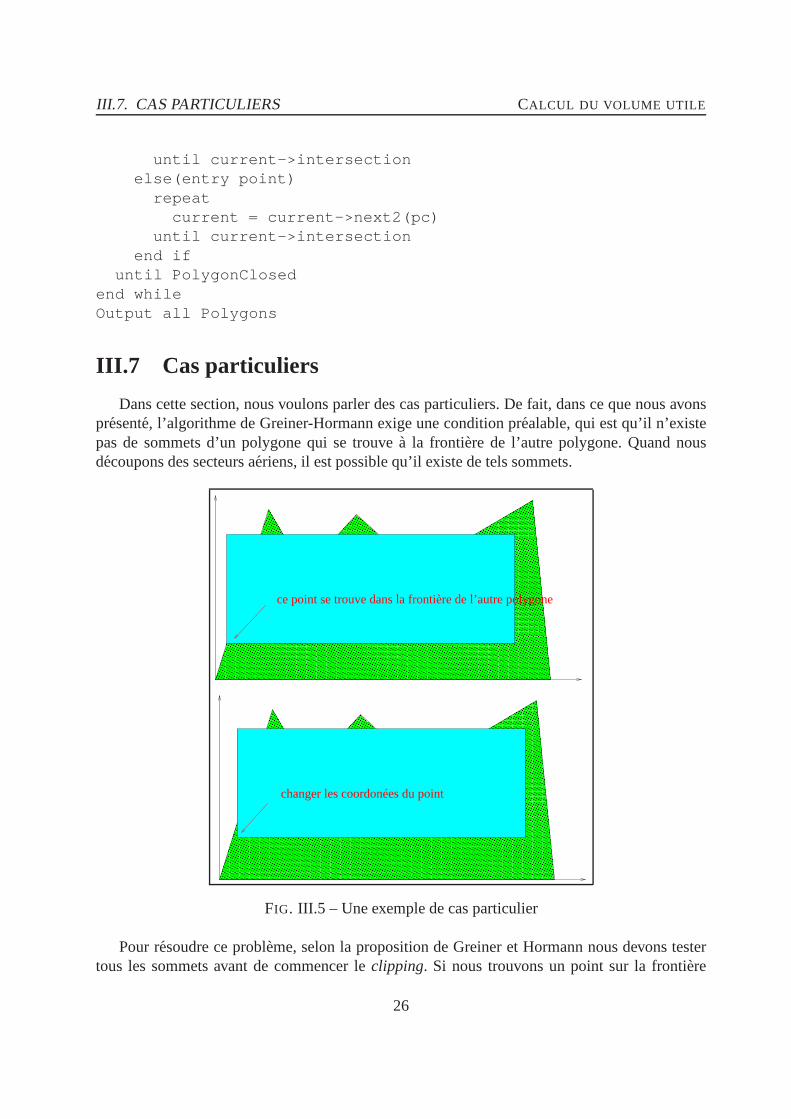
Dans cette section, nous voulons parler des cas particuliers. De fait, dans ce que nous avonspresente, l’algorithme de Greiner-Hormann exige une condition prealable, qui est qu’il n’existepas de sommets d’un polygone qui se trouve a la frontiere del’autre polygone. Quand nousdecoupons des secteurs aeriens, il est possible qu’il existe de tels sommets.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ce point se trouve dans la frontière de l’autre polygone
changer les coordonées du point
FIG. III.5 – Une exemple de cas particulier
Pour resoudre ce probleme, selon la proposition de Greiner et Hormann nous devons testertous les sommets avant de commencer leclipping. Si nous trouvons un point sur la frontiere
26
CALCUL DU VOLUME UTILE III.8. RESULTATS
de l’autre polygone, il faut changer ses coordonnees en ajoutant une petite perturbation, commeillustre sur la figure III.5.
On pourrait envisager d’autres solutions a ce probleme, en traitant chaque cas particulierseparement. Vu la rarete des cas particuliers, et vu le peu d’influence d’une petite perturbationsur la surface des polygones, nous avons choisi la solution proposee par Greiner et Hormann.
Pour detecter les cas particuliers ou un point est sur une arete, nous avons utilise des fonctionsexistantes de la librairie GEOMETRY, developpee en Ocamlau LOG, qui permettent de situerun point par rapport a un segment oriente.
III.8 R esultats
Pour tester notre algorithme, nous avons developpe une petite interface graphique permettantde produire aleatoirement des polygonessujetet clip, et d’afficher le resultat du clipping.
FIG. III.6 – Une exemple de resultat
Cet interface s’appuie sur la librairie Ocaml Graphics. La figure III.6 nous montre un exemplede resultat, avec a droite les deux polygones P et S, et a gauche le resultat du clipping.
III.9 Perspectives d’utilisation
L’objectif final du travail que nous venons de presenter estde calculer le volume utile dechaque secteur de controle a chaque instant de la journee, en soustrayant le volume des zonesmilitaires actives.
Comme les secteurs et les zones sont composes de tubes horizontaux de section polygonales,notre algorithme peut etre utilise sur ces sections pour trouver la surface utile. Le volume utileest alors obtenu en multipliant cette surface par la hauteursur laquelle le secteur et la zone sontsecants.
27
28 CALCUL DU VOLUME UTILE
Pour tester si le volume utile est un indicateur de complexite plus pertinent que le volumetotal du secteur, il etait envisage de l’utiliser en entr´ee du reseau de neurone decrit dans [26].
Malheureusement, les donnees sur l’activation des zones militaires n’ont pas pu etre obtenuesa temps pour etre utilisees pendant ce stage. L’algorithme que nous avons developpe a ete integredans la librairie d’outils geometriques du LOG, et pourraetre utilise pour calculer le volumeutile, des que les donnees d’activation des zones militaires seront disponibles.
Par ailleurs, une legere modification de l’algorithme permet d’obtenir l’enveloppe des deuxpolygones. Il pourra donc etre facilement utilise pour calculer quelques nouveaux indicateurs dela complexite, comme par exemple la distance d’un conflit ala frontiere du secteur de controle,cette frontiere etant definie par l’enveloppe des secteurs elementaires composant le secteur decontrole.
Chapitre IV
Analyse d’indicateurs de la complexite
IV.1 Objectifs de l’ etude
Comme nous en avons deja parle au chapitre II, un objectifprincipal du projet S2D2 estd’etudier les correlations entre les indicateurs de complexite et les regroupements de secteurs,pour eventuellement prevoir les configurations optimales d’ouvertures de secteurs aeriens, enequilibrant au mieux la charge de trafic (calcule a partirdes indicateurs) entre les differentspostes de travail des controleurs.
Pour obtenir un modele interessant, des ensembles d’indicateurs ont ete testes comme donneesd’entree de reseaux de neurones ([25], [26]), qui fournissaient en sortie l’etat de regroupementdu secteur. Le meilleur modele trouve selon les comparaisons des valeurs du BIC (Schwartz’sBayesian Information Criterion) comportait 6 indicateurs differents :V , Nb, chgt niv, flux 15,flux 60, inter hori.
Dans le chapitre precedent, nous avons cherche un indicateur plus precis que le volume totaldu secteur, en tenant compte des activations de zones militaires.
Dans ce chapitre, nous allons examiner deux autres indicateurs et voir s’ils pourraient etreremplaces par des indicateurs plus simples, qui seraient plus robustes aux imprecisions de navi-gation des avions.
En effet, les etudes passees du projet S2D2 s’appuient surles enregistrements des positionsradar des avions. Mais quand il faudra faire une prevision des schemas d’ouvertures deux joursavant l’arrivee du trafic, nous ne disposerons pas de ces donnees radar pour calculer les indica-teurs de complexite. Il faudra utiliser les plans de vol deposes par les avions avant leur depart.Comme les avions ne partent pas toujours a l’heure et ne suivent pas toujours exactement la routeprevue, cela introduira des erreurs dans la prevision desindicateurs. C’est pourquoi nous cher-chons des indicateurs plus simples et plus robustes aux erreurs, qui pourraient remplacer certainsde ceux utilises jusqu’a maintenant.
Le premier indicateur auquel on s’interesse estinter hori ([25]), le nombre de paires d’avionsse croisant avec un angle superieur a vingt degres. Il represente le nombre de ”croisements”horizontaux potentiels, et est le plus significatif pour l’explication des etats de regroupement,parmi les indicateurs de la composante C4 de l’analyse en composantes principale realisee dans
IV.2. DEMARCHE PROPOSEE ANALYSE D’ INDICATEURS
[24]. Cet indicateur ne tient pas compte du sens de l’avion sur sa trajectoire, ni de la vitesse derapprochement des avions. Il ne traduit donc pas veritablement la convergence, dans le sens d’unrapprochement des avions, mais plutot le fait que les flux d’avions se croisent a l’interieur dusecteur, ou au contraire suivent des routes plus ou moins paralleles.
L’autre indicateur que nous allons chercher a remplacer est chgt niv. Il represente la vitesseverticale moyenne de tous les avions evoluant dans le secteur a l’instantt. Cet indicateur dependdu type de trafic evoluant dans le secteur : avions en evolutions verticales (montee, descente), oubien avions stables en niveau de vol.
Le fait que les evolutions verticales ne soient pas pertinentes sur un secteur donne, mais ledeviennent sur plusieurs secteurs ([25]), laisse a penserqu’ils caracterisent essentiellement laspecialisation des secteurs : arrivee ou depart avec du trafic evolutif et de fortes variations desvitesses, ou bienen-routepur avec essentiellement du trafic stable en niveau et en vitesse.
Ces deux indicateurs montrent de fortes variations en fonction des avions presents dans lesecteur. On peut esperer que des indicateurs plus simples quechgt niv et inter hori soient moinssensibles aux imprecisions dans le suivi des plans de vol.
Dans notre etude, nous allons chercher a caracteriser les secteurs aeriens en quelques groupesdistincts, selon les valeurs prises par les deux indicateurs chgt niv et inter hori. L’appartenanced’un secteur a l’un de ces groupes est une caracteristiqueconstante dans le temps, qui n’estabsolument pas sensible aux erreurs de prevision des trajectoires des avions. Si on obtient desgroupes satisfaisants, il sera possible d’utiliser l’appartenance du secteur a un des groupes commenouvel indicateur de complexite.
Il s’agit la d’une simplification importante par rapports aux indicateurs de depart. Une autrepossibilite est aussi de remplacer les indicateurschgt niv et inter hori par leur moyennes, pourchaque secteur.
IV.2 Demarche proposee
La demarche adoptee consiste dans un premier temps a classer les secteurs en deux ou troiscategories, en fonction des valeurs des deux indicateurs.Pour cela, nous utiliserons une methodedeclustering1 classique : la methode des k-moyennes (ouk-meansen anglais).
Si on arrive effectivement a identifier des groupes selon ces criteres, on peut esperer rempla-cer les valeurs des indicateurs par les coordonnees des centres desclusters2. Celles-ci deviennentde nouveaux indicateurs de complexite.
Nous pourrons ensuite tester ces nouveaux indicateurs en entree du reseau de neurones pourfaire la comparaison entre les modeles, et voir s’ils donnent des previsions de l’etat de regroupe-ment comparables a celles obtenues avec les indicateurs initiaux.
1en francais : aggregation.2Les groupes identifies par la methode declustering
30

ANALYSE D’ INDICATEURS IV.3. METHODE DES K-MEANS
IV.3 M ethode des k-means
IV.3.1 Introduction
Le clusteringa pour but de rassembler des objets par groupes en fonction d’un critere dedistance ou de similarite entre les objets, et selon les deux principes complementaires suivants :
– maximisation de la similarite intra-classe,– minimisation de la similarite inter-classes.L’algorithme classiquek-meansa ete popularise et ameliore par Hartigan en1975 (voir Harti-
gan et Wong [30]). Cet algorithme vise a regrouper les pixels en k regions distinctes ; k etant fixepar l’utilisateur. Il se base sur les intensites des couleurs (un pixel est decrit par un vecteur dansR3). On affecte aleatoirement chaque pixel a une region et on itere comme suit : les centres desdifferents groupes sont recalcules et chaque pixel est denouveau affecte a un groupe en fonctiondu centre le plus proche. La convergence est atteinte lorqueles centres sont fixes.
En terme de minimisation, les pixels(x1, x2, ..., xn), xi ∈ R3 sont repartis enk groupes achaque iteration. Notons(y1, y2, ...yk) l’ensemble des centres des groupes. Leurs coordonneessont recalculees par moyennage de celles des points du groupe. Un pixelxi se voit affecter legroupej si ‖xi − yj‖ = minu‖xi − yu‖.
Cela peut se formaliser de la maniere suivante : Chacun des points est attribue a un groupegrace a la fonction
f : {x1, ..., xn} → {1, . . . , k}xi → f(xi)
On obtient des groupes compacts en minimisant l’expressionsuivante :
J =
n∑
i=1
‖xi − Cf(xi)‖2 avec(C1, ..., Cn) ∈ (RM)N
On peut montrer que pourf fixee,J est minimum lorsque lesC1,...,Cn correspondent res-pectivement aux barycentre des groupesf−1(1),..,f−1(k).
L’algorithme desk-meansa pour but de minimiser l’expressionJ de maniere iterative.
IV.3.2 Algorithme
Algorithme k-Means :– 1- affecter aleatoirement chaque point a un desk groupes,– 2- recalculer les barycentre de chacun desk groupes :
Ci = card(f−1(i))−1 ×∑
x∈f−1(i)
x
– 3- reaffecter chaque point au groupe dont le centre est le plus proche :
31
IV.4. LOGICIEL UTILISE ANALYSE D’ INDICATEURS
f(xi) = argminl∈1,...,k‖xi − Cl‖
– 4- repeter 2 et 3 jusqu’a ce que la convergence soit atteinte (barycentres fixes).
FIG. IV.1 – Principe de k-means
On peut trouver qu’il y a toujours convergence de l’algorithme. Cependant il n’y a pas degarantie de trouver effectivement le minimum global de l’expressionJ que l’on cherche a mini-miser.
IV.4 Logiciel utilis e
Pour leclusteringet les reseaux de neurones, nous avons utilise l’environnement R. C’est unlogiciel libre de calcul statistique base sur un environnement oriente objet et sur le langage deprogrammation S. Il est disponible sur PC avec Microsoft Windows ou sur stations Unix ou Li-nux. R ne peut etre utilise qu’en ”ligne de commandes”, il n’existe pas d’interface contrairementa la version payante de R : S-PLUS.
L’environnement R est tres pratique pour le traitement statistique des donnees. Le logicielet les codes gratuits developpes sous cet environnement peuvent etre telecharges sur l’inter-net(http ://cran.ch.r-project.org).
Ce langage fonctionnel permet toutes les structures de controle d’un langage comme C ouOCAML. Pratiquement, il fournit une large variete d’outils statistiques (modele lineaire et nonlineaire, analyse des series temporelles, classification, et des techniques de realisation de gra-phiques.
Dans notre etude, nous avons utilise les package suivants:
32
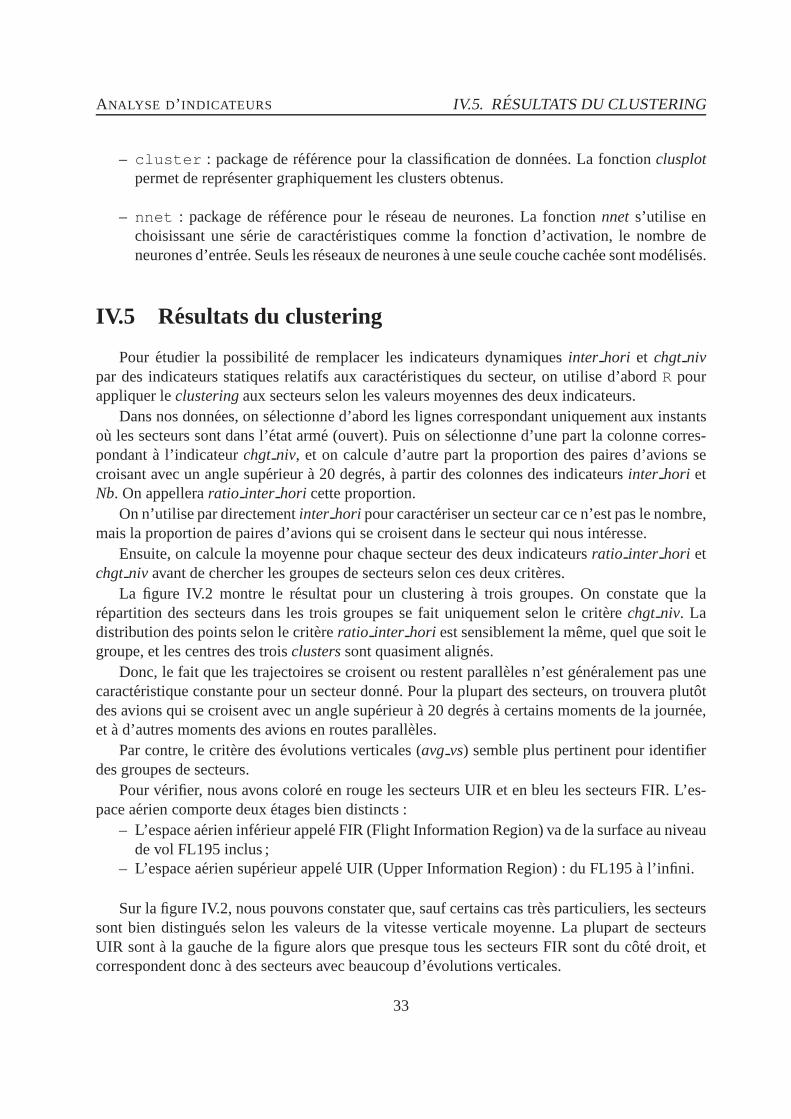
ANALYSE D’ INDICATEURS IV.5. RESULTATS DU CLUSTERING
– cluster : package de reference pour la classification de donnees.La fonctionclusplotpermet de representer graphiquement les clusters obtenus.
– nnet : package de reference pour le reseau de neurones. La fonction nnet s’utilise enchoisissant une serie de caracteristiques comme la fonction d’activation, le nombre deneurones d’entree. Seuls les reseaux de neurones a une seule couche cachee sont modelises.
IV.5 Resultats du clustering
Pour etudier la possibilite de remplacer les indicateursdynamiquesinter hori et chgt nivpar des indicateurs statiques relatifs aux caracteristiques du secteur, on utilise d’abordR pourappliquer leclusteringaux secteurs selon les valeurs moyennes des deux indicateurs.
Dans nos donnees, on selectionne d’abord les lignes correspondant uniquement aux instantsou les secteurs sont dans l’etat arme (ouvert). Puis on s´electionne d’une part la colonne corres-pondant a l’indicateurchgt niv, et on calcule d’autre part la proportion des paires d’avions secroisant avec un angle superieur a 20 degres, a partir des colonnes des indicateursinter hori etNb. On appelleraratio inter hori cette proportion.
On n’utilise par directementinter hori pour caracteriser un secteur car ce n’est pas le nombre,mais la proportion de paires d’avions qui se croisent dans lesecteur qui nous interesse.
Ensuite, on calcule la moyenne pour chaque secteur des deux indicateursratio inter hori etchgt niv avant de chercher les groupes de secteurs selon ces deux criteres.
La figure IV.2 montre le resultat pour un clustering a troisgroupes. On constate que larepartition des secteurs dans les trois groupes se fait uniquement selon le criterechgt niv. Ladistribution des points selon le critereratio inter hori est sensiblement la meme, quel que soit legroupe, et les centres des troisclusterssont quasiment alignes.
Donc, le fait que les trajectoires se croisent ou restent paralleles n’est generalement pas unecaracteristique constante pour un secteur donne. Pour laplupart des secteurs, on trouvera plutotdes avions qui se croisent avec un angle superieur a 20 degres a certains moments de la journee,et a d’autres moments des avions en routes paralleles.
Par contre, le critere des evolutions verticales (avg vs) semble plus pertinent pour identifierdes groupes de secteurs.
Pour verifier, nous avons colore en rouge les secteurs UIR et en bleu les secteurs FIR. L’es-pace aerien comporte deux etages bien distincts :
– L’espace aerien inferieur appele FIR (Flight Information Region) va de la surface au niveaude vol FL195 inclus ;
– L’espace aerien superieur appele UIR (Upper Information Region) : du FL195 a l’infini.
Sur la figure IV.2, nous pouvons constater que, sauf certainscas tres particuliers, les secteurssont bien distingues selon les valeurs de la vitesse verticale moyenne. La plupart de secteursUIR sont a la gauche de la figure alors que presque tous les secteurs FIR sont du cote droit, etcorrespondent donc a des secteurs avec beaucoup d’evolutions verticales.
33
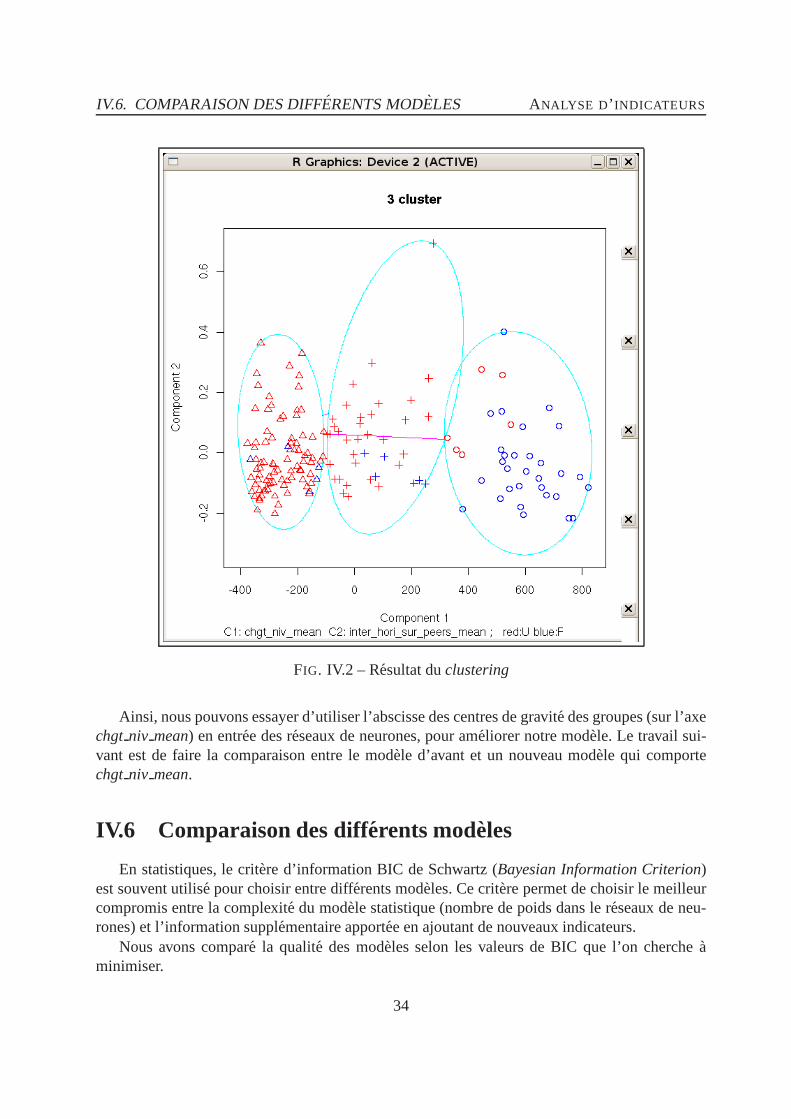
IV.6. COMPARAISON DES DIFFERENTS MODELES ANALYSE D’ INDICATEURS
FIG. IV.2 – Resultat duclustering
Ainsi, nous pouvons essayer d’utiliser l’abscisse des centres de gravite des groupes (sur l’axechgt niv mean) en entree des reseaux de neurones, pour ameliorer notremodele. Le travail sui-vant est de faire la comparaison entre le modele d’avant et un nouveau modele qui comportechgt niv mean.
IV.6 Comparaison des differents modeles
En statistiques, le critere d’information BIC de Schwartz(Bayesian Information Criterion)est souvent utilise pour choisir entre differents modeles. Ce critere permet de choisir le meilleurcompromis entre la complexite du modele statistique (nombre de poids dans le reseaux de neu-rones) et l’information supplementaire apportee en ajoutant de nouveaux indicateurs.
Nous avons compare la qualite des modeles selon les valeurs de BIC que l’on cherche aminimiser.
34

ANALYSE D’ INDICATEURS IV.6. COMPARAISON DES DIFFERENTS MODELES
IV.6.1 Definition du BIC
Voici la formule de BIC :
BIC = 2λln(N) − 2N∑
i=1
C∑
k=1
tnk .ln(ynk )
– N : nombre de l’echantillon de donnees ;– λ : un facteur de penalite,nombre de parametres libres du modele(ici, le nombre de poids
et de biais du reseau) ;– t : valeur du cilbe– y : valeur de sortie
IV.6.2 Resultats sur les nouveaux indicateurs
Nous utilisons la moyenne sur la taille de l’echantillon dedonneesAvgBIC = BIC/Npour faire la comparaison entre les previsions des reseaux de neurones. Pour chaque modeleteste, nous avons effectue cinq apprentissages du reseau de neurones.
Le tableau IV.1 donne les valeurs moyennes et minimum d’AvgBIC sur les cinq executions,permettant d’analyser la pertinence, comme indicateur de complexite, des centres des clusterstrouves au chapitre precedent.
AvgBIC Valeur
min(testA) 0.772258min(testclust) 0.7627924min(testchgt niv) 0.8049226mean(testA) 0.7835734mean(testclust) 0.7801343mean(testchgt niv) 0.8166942
TAB. IV.1 – Comparaison de BIC des modeles1
Dans ce tableau, le modele testclust est compose des indicateurs :V , nb, flux15, flux6, inter hori, centrecluster.Le modele testchgt niv comprend les indicateurs :V , nb, flux15, flux6, inter hori, chgt niv.Le modele testA comprend les indicateurs :V , nb, flux15, flux6, inter hori, centrecluster, chgtniv.
Le nouvel indicateurcentrecluster, deja presente dans le chapitre precedent, est le resultatde notre analyse de clustering. C’est en fait l’abscisse du centre du cluster auquel appartient lesecteur.
La valeur minimum, tout comme la moyenne sur les cinq executions, deAvgBIC est meilleurepour le modele testclust que pour les modeles testA et testchgt niv. Le meilleur compromisentre ces trois modeles est donc testclust.
35
IV.6. COMPARAISON DES DIFFERENTS MODELES ANALYSE D’ INDICATEURS
AvgBIC Valeur
min(testB) 0.7420803min(testmoyen) 0.7408966min(testchgt niv) 0.8049226mean(testB) 0.7556326mean(testmoyen) 0.7488875mean(testchgt niv) 0.8166942
TAB. IV.2 – Comparaison de BIC des modeles2
Dans le tableau IV.2, nous presentons la comparaison entretrois autres modeles permettantd’etudier l’indicateurmoyennechgt niv, qui est la moyenne de l’indicateurchgt niv pour chaquesecteur.
Ici, le modele testB comprend les indicateurs :V , nb, flux15, flux6, inter hori, chgt niv, moyennechgt niv.Le modele testmoyen comprend les indicateurs :V , nb, flux15, flux6, inter hori, moyennechgt niv.Le modele testchgt niv comprend les indicateurs :V , nb, flux15, flux6, inter hori, chgt niv
On voit egalement que le modele testmoyen est le meilleur compromis sur ces trois modeles.En comparant sur les deux tableaux les modeles testclust et testmoyen, on constate que
l’indicateur des moyennes pour chaque secteurmoyennechgt niv est un peu plus utile pour ex-pliquer les etats de regroupement que l’indicateur des clusterscentrecluster.
Ainsi, nous avons trouve deux modeles (testmoyen et testclust) qui sont plus interessantsque notre modele initial (testchgt niv).
36
IV.6. COMPARAISON DES DIFFERENTS MODELES 37
Conclusion et perspectives
En conclusion, le travail presente dans ce rapport a permis d’ameliorer les indicateurs decomplexite du trafic aerien developpes dans le projet S2D2, a la Sous-Direction desEtudes et dela Recherche appliquee (SDER) de la DSNA/DTI.
Dans le chapitre III, nous avons implante un algorithme declipping de polygones qui per-mettra de calculer le volume utile des secteurs de controleaerien en fonction de l’activation deszones militaires. La pertinence de ce nouvel indicateur parrapport aux decisions d’ouverture dessecteurs n’a pas pu etre testee car les donnees sur l’activation des zones militaires n’ont pas etedisponibles avant la fin du stage.
Enfin, dans le dernier chapitre, nous avons applique une methode declusteringaux secteursde controle aerien, et montre qu’il n’etait pas possible de caracteriser les secteurs aeriens selonle critere du croisement des flux de trafic. Par contre, nous avons obtenu une classification dessecteurs selon le critere des evolutions verticales. Cette classification definit un nouvel indicateurstatique de complexite, qui peut etre utilise dans le modele de prevision des etats de regroupe-ments des secteurs de controle aerien. Nous avons egalement teste un autre indicateur, qui est lamoyenne pour chaque secteur, de l’indicateur des evolutions verticales (chgt niv)
Nous avons montre que chacun de ces nouveaux indicateurs peut remplacer celui (calculetoutes les minutes) de la moyenne des vitesses verticales des avions presents dans le secteur al’instant t, sans diminuer de facon importante les performances du modele.
Les perspectives d’utilisation de ce travail sont nombreuses. Tout d’abord, l’algorithme duchapitre III permettra de calculer le volume utile du secteur, mais aussi d’autres indicateurs nou-veaux utilisant l’enveloppe, souvent non convexe, de plusieurs secteurs elementaires.
Par ailleurs, les nouveaux indicateurs proposes au chapitre IV permettront une prevision plusrobuste des schemas d’ouverture des secteurs quand on voudra faire cette prevision a partir deplans de vol, deux jours avant l’arrivee du trafic.
En effet, ces indicateurs ne dependent que du secteur, et sont donc insensibles aux retards etaux changements par rapport a la route prevue.

Bibliographie
[1] Internet site (DGAC) : http ://www.aviation civile.gouv.fr/.
[2] Internet site (wiki) : http ://fr.wikipedia.org/wiki/DGA.
[3] G. M. Flynn, C. Leleu, and L. Zerrouki. Traffic complexityindicators and sector typologyanalysis of U.S. and european centres. Technical report, Eurocontrol, 2003.
[4] Note de synthese sur l’indicateur de complexite PRU. Technical report, DTI/SDER (exCENA), 2005.
[5] ACE Working Group on Complexity. Complexity metrics forANSP benchmarking ana-lysis. Report commissioned by the performance review commission, Eurocontrol, April2006.
[6] Cognitive complexity in air traffic control, a litterature review. Technical report, Eurocon-trol experimental centre, 2004.
[7] P. Kopardekar. Dynamic density : A review of proposed variables. FAA WJHTC inter-nal document. overall conclusions and recommendations, Federal Aviation Administration,2000.
[8] P. Kopardekar and S. Magyarits. Measurement and prediction of dynamic density. InProceedings of the 5th USA/Europe Air Traffic Management R & DSeminar, 2003.
[9] A. J. Masalonis, M. B. Callaham, and C. R. Wanke. Dynamic density and complexitymetrics for realtime traffic flow management. InProceedings of the 5th USA/Europe AirTraffic Management R & D Seminar, 2003.
[10] A. Majumdar, W. Y. Ochieng, G. McAuley, J.M. Lenzi, and C. Lepadetu. The factorsaffecting airspace capacity in europe : A framework methodology based on cross sectionaltime-series analysis using simulated controller workloaddata. InProceedings of the 6thUSA/Europe Air Traffic Management R & D Seminar, 2005.
[11] G.B. Chatterji and B. Sridhar. Measures for air traffic controller workload prediction. InProceedings of the First AIAA Aircraft Technology, Integration, and Operations Forum,2001.
[12] J.H. Crump. Review of stress in air traffic control : Its measurement and effects.Aviation,Space and Environmental Medecice, 1979.
[13] P. Averty, S. Athenes, C. Collet, and A. Dittmar. Evaluating a new index of mental workloadin real ATC situation using psychological measures. Note CENA NR02-763, CENA, 2002.
40 BIBLIOGRAPHIE
[14] I. V. Laudeman, S. G. Shelden, R. Branstrom, and C. L. Brasil. Dynamic density : An airtraffic management metric. Technical report, 1999.
[15] A. Yousefi, G. L. Donohue, and K. M. Qureshi. Investigation of en route metrics for modelvalidation and airspace design using the total airport and airspace modeler (TAAM). InProceedings of the fifth USA/Europe Air Traffic Management R&D Seminar, 2003.
[16] ACT-540 NAS Advanced Concepts Branch. An evaluation ofdynamic density metricsusing RAMS. Technical report (draft) DOT/FAA/CT-TN, Federal Aviation Administration,April 2001.
[17] D. Gianazza and J. M. Alliot. Optimization of air trafficcontrol sector configurations usingtree search methods and genetic algorithms. InProceedings of the 21st Digital AvionicsSystems Conference, 2002.
[18] D. Gianazza, J. M. Alliot, and G. Granger. Optimal combinations of air traffic controlsectors using classical and stochastic methods. InProceedings of the 2002 InternationalConference on Artificial Intelligence, 2002.
[19] D. Gianazza.Optimisation des flux de trafic aerien. PhD thesis, Institut National Polytech-nique de Toulouse, 2004.
[20] B. Sridhar, K. S. Sheth, and S. Grabbe. Airspace complexity and its application in air trafficmanagement. InProceedings of the 2nd USA/Europe Air trafic Management R&D Seminar.
[21] D. Delahaye and S. Puechmorel. Air traffic complexity : towards intrinsic metrics. InProceedings of the third USA/Europe Air Traffic Management R& D Seminar, 2000.
[22] P. Averty. Conflit perception by ATCS admits doubt but not inconsistency. InProceedingsof the 6th Air Traffic Management Research & Developpment Seminar, 2005.
[23] P. Averty, K. Guittet, and P. Lezaud.Work in progress, presented at an internal SDERseminar. Technical report, DTI/SDER (former CENA), 2005.
[24] K. Guittet and D. Gianazza. Analyse descriptive des indicateurs de complexite du traficaerien a partir des donnees IMAGE et COURAGE. Note NR05-905, DSNA/DTI/SDER,Decembre 2005.
[25] D. Gianazza and K. Guittet. Evaluation of air traffic complexity metrics using neural net-works ans sector status. InProceedings of the 2nd International Conference on Researchin Air Transportation. ICRAT, 2006.
[26] D. Gianazza and K. Guittet. Selection and evaluation ofair traffic complexity metrics. InProceedings of the 25th Digital Avionics Systems Conference. DASC, 2006.
[27] Note anonyme non referencee. Projection utiliseedans COURAGE, PRESAGE, et SHA-MAN pour l’affichage du fond de carte. Technical report, STNA/7.
[28] G. Greiner and K. Hormann. Efficient clipping of arbitrary polygons. InACM Transactionson Graphics, 1998.
[29] LIU Yong-kui and HUANG You-Qun, GAO Yun. An efficient algorithm for polygon clip-ping. Journal of software, 2003.
[30] J. A. Hartigan and M. A. Wong. A k-means clustering algorithm. Applied Statistics, 1978.


















