MADA Les lois de commande en régime permanent..pdf

of 125
Transcript of MADA Les lois de commande en régime permanent..pdf
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
1/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
2/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
3/125
ii
Abstract
This thesis presents various tools and approaches for the determination of the steady-state
control laws of the doubly fed induction machine on the whole operation speed range
operating as motor and generator. The purpose is to derive the control laws in terms of rotor
voltage and control angle voltage (real and reactive power) for different control strategies.
A first tool for extracting control laws based on a nonlinear optimization process has been
developed. Then an analytical approach based on the equivalent circuit of the DFIM has
been used in order to avoid problems related to the process of nonlinear optimization.
Another simulation tool developed in the Matlab/Simulink was aimed to validate the
results.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
4/125
iii
Avant-Propos
Ce mmoire a t complt au Laboratoire d'Electrotechnique, lectronique de Puissance et
Commande Industrielle (L.E.E.P.C.I) du dpartement de gnie lectrique et de gnie
Informatique de la facult des sciences et de gnie de luniversit Laval (Qubec, Canada).
Je tiens adresser ma profonde gratitude envers toutes les personnes qui ont collabor
laccomplissement de ce travail.
Je remercie en premier lieu mon directeur de recherche M. Philippe Viarougepour mavoir
honor de sa confiance en me proposant ce sujet et en acceptant la direction de ce mmoire.
Je le remercie encore plus personnellement pour son soutien financier, scientifique et
moral, sa disponibilit et ses conseils tout au long de ce travail.
Mes remerciements vont aussi aux professeurs ainsi qu mes collgues au sein du
LEEPCI. Je remercie galement luniversit et toute lquipe technique du dpartement de
gnie lectrique et de gnie informatique pour leur soutien technique et logistique.
Pour terminer, je tiens remercier mes camarades du LEEPCI pour tout le temps pass
ensembles. Toute ma reconnaissance et mes remerciements mon pre Mohamed, ma
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
5/125
iv
A Mohamed BENNANI et
Chadia BOUHLAL.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
6/125
v
Table des matires
RSUM.................................................................................................................... I
ABSTRACT................................................................................................................... II
AVANT-PROPOS ................................................................................................................ III
TABLE DES MATIRES ..................................................................................................... V
LISTE DES TABLEAUX ................................................................................................. VIII
LISTE DES FIGURES ........................................................................................................ IX
LISTE DES ABRVIATIONS ET DES SYMBOLES ...................................................... XII
INTRODUCTION ............................................................................................................. XIV
CHAPITRE I : MACHINE ASYNCHRONE ROTOR BOBIN DOUBLEALIMENTATION. ..................................................................................... 1
I.1. Introduction ............................................................................................................ 1I.2. Machine asynchrone double alimentation de type rotor bobin ......................... 1
I.2.1. Constitution de la machine asynchrone rotor bobin ................................... 1I.2.2. Configuration du systme vitesse variable avec machine asynchrone
double alimentation de type rotor bobin........................................................ 2I.2.3. Intrt de la MADA ........................................................................................ 3
I.3. Principe de fonctionnement ................................................................................... 5I.3.1. Production du couple lectromagntique ........................................................ 5
I.3.2. Fonctionnement en hypo et hyper synchronisme ............................................ 8I.3.3. Fonctionnement moteur et gnrateur ........................................................... 10I.4. Transfert de puissance dans la MADA ................................................................ 11I.5. Conclusion ........................................................................................................... 13
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
7/125
vi
CHAPITRE III : OPTIMISATION DU COUPLE LECTROMAGNTIQUE DE LAMACHINE ASYNCHRONE DOUBLE ALIMENTATION............... 30
III.1. Introduction .......................................................................................................... 30III.2. Outil numrique : Environnement Excel ............................................................. 30III.3. Implantation des quations de modlisation dans Excel ..................................... 34III.4. Grandeurs du contrle du couple lectromagntique .......................................... 36III.5. Stratgie de commande couple constant et facteur de puissance impos ......... 37III.6. Conclusion ........................................................................................................... 44
CHAPITRE IV : CALCUL DES LOIS DE COMMANDE ET VALIDATION PAR
SIMULATION. ........................................................................................ 45IV.1. Introduction .......................................................................................................... 45IV.2. Approche analytique ............................................................................................ 46
IV.2.1. Calcul analytique de la loi de commande avec circuit quivalent complet .. 46IV.2.2. Calcul analytique de la loi de commande avec circuit quivalent simplifi . 48IV.2.3. Estimation du facteur de puissance au stator SPF ......................................... 50
IV.3. Validation des rsultats par simulation ................................................................ 51
IV.3.1.
Transformation de Park ................................................................................. 51
IV.3.2. Valeurs relatives (Systme en p.u) ................................................................ 53IV.3.3. Commande globale........................................................................................ 54
IV.3.3.1. Point dquilibre et stabilit.................................................................... 54IV.3.3.2. Mesure des grandeurs ............................................................................. 57IV.3.3.3. Gnration des courants rotoriques de rfrence et rgulation ............... 58IV.3.3.4. Rgulation des courants rotoriques ......................................................... 59IV.3.3.5. Modlisation du convertisseur connect au rotor ................................... 61
IV.3.4. Validation des rsultats ................................................................................. 61IV.3.4.1. Validation des rsultats doptimisation par simulation ........................... 62IV.3.4.2. Validation des rsultats analytiques ........................................................ 65
IV.4. Conclusion ........................................................................................................... 68
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
8/125
vii
V.7. Adaptation aux types de charge ........................................................................... 94V.8. Conclusion ........................................................................................................... 96
CONCLUSION................................................................................................................. 98
BIBLIOGRAPHIE .............................................................................................................. 100
ANNEXE A LISTING DES PROGRAMMES VBA.................................................. 102
ANNEXE B SCRIPT MATLAB ET SCHMA SIMULINK..................................... 106
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
9/125
viii
Liste des tableauxTableau I-1: Point de fonctionnement en synchronisme ....................................................... 9Tableau III-1: Les paramtres de la MADA ....................................................................... 36Tableau IV-1:Grandeurs de rfrence pour la transformation en p.u ................................ 54 Tableau IV-2: Rsultats comparatifs entre loptimisation et la simulation en pourcentage62Tableau IV-3: Les rsultats comparatifs en pourcentage entre loptimisation et lapproche
analytique ...................................................................................................................... 65Tableau IV-4: Rsultats analytiques pour un couple et un GPF impos ............................. 67Tableau IV-5: Rsultats de validation sur Excel ................................................................. 67Tableau V-1: La Caractristique de la charge maximale pour deux types de charge et
diffrents facteur de puissance. ..................................................................................... 89
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
10/125
ix
Liste des figures
Figure I-1: Structure du stator et des contacts rotoriques de la machine asynchrone rotorbobin. ............................................................................................................................. 2
Figure I-2: Configuration du systme retenue pour ltude.................................................. 3Figure I-3 :volution de la configuration lectrique de la machine asynchrone .................. 4
Figure I-4: Diagramme vectoriel des forces magntomotrices ............................................. 6Figure I-5: Circuit magntique de la machine ...................................................................... 7Figure I-6 :Configuration des enroulements et des flux dans une MADA ........................... 7Figure I-7: Circuit lectrique au rotor ................................................................................... 9Figure I-8: Diagramme vectoriel des forces magntomotrices en mode moteur et
gnrateur ...................................................................................................................... 10Figure I-9: Quadrants de fonctionnement de la machine asynchrone double alimentation
...................................................................................................................................... 12
Figure II-1Transformation tension/frquence .................................................................... 15Figure II-2: Schma monophas quivalent de la machine asynchrone doublealimentation relle. ........................................................................................................ 16
Figure II-3: Tensions, courants et rapports de transformation ........................................... 17Figure II-4: Transfert des puissances actives ..................................................................... 18Figure II-5: Schma quivalent de la machine asynchrone la mme pulsation du stator 20Figure II-6: Circuit monophas quivalent ramen au primaire ........................................ 21Figure II-7: Transformation du schma quivalent en "T" en schma quivalent en "L" .. 22
Figure II-8: Schma quivalent en "L"avec =1 ................................................................ 22Figure II-9: Schma quivalent simplifi en "L"................................................................ 23Figure II-10: Bilan de puissance active .............................................................................. 24Figure II 11 : Rpartition de puissance dans la machine 25
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
11/125
x
Figure IV-1: Diagramme de la procdure de dtermination analytique des lois decommande au rotor ....................................................................................................... 46
Figure IV-2: Reprsentation de la machine asynchrone dans le formalisme de latransforme de Park ...................................................................................................... 53Figure IV-3: Rgulation du couple lectromagntique pour trois types de charge ............ 55Figure IV-4: Point de fonctionnement en mode gnrateur dans le plan couple-vitesse ... 56Figure IV-5: Artifice de dmarrage de la machine en mode gnrateur au cas dun couple
proportionnel la vitesse ou au carr de la vitesse ....................................................... 57Figure IV-6: Reprsentation du vecteur spatial dans le rfrentiel diphas (,) .............. 58Figure IV-7: Schma bloc pour le calcul de la frquence fr ............................................... 58
Figure IV-8: Gnration des courants rotoriques dans le rfrentiel de Park ..................... 59Figure IV-9: Schma des courants rotoriques mesurs dans le rfrentiel de Park ........... 60Figure IV-10: Schmatisation du rgulateur PI de courant ................................................ 60Figure IV-11: Schma du modle moyen du convertisseur ................................................ 61Figure IV-12: Validation des rsultats doptimisation par les rsultats de simulation en
mode moteur pour un couple et un facteur de puissance imposs. ............................... 64Figure IV-13: Comparaison entre les rsultats analytiques et les rsultats doptimisation
en mode moteur pour un couple et un facteur de puissance imposs. .......................... 66
Figure V-1: Diagramme vectoriel de la machine synchrone pour un point defonctionnement lintrieur de la zone I...................................................................... 71
Figure V-2: Limites de fonctionnement dans le plan couple vitesse .................................. 72Figure V-3: Couple disponible dans la machine avec les zones de limitation .................... 73Figure V-4: Diagramme vectoriel des forces magntomotrices pour une stratgie couple
maximal en mode moteur ............................................................................................. 74Figure V-5: Loi de commande Vr et pour une stratgie couple maximal ..................... 75Figure V-6: Courantau stator en mode moteur pour une stratgie couple maximal. ..... 75Figure V-7: Diagramme vectoriel en fonctionnement moteur pour un glissement s=0.3. . 76Figure V-8: Diagramme vectoriel en fonctionnement moteur pour un glissement s=-1.11
...................................................................................................................................... 77
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
12/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
13/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
14/125
xiii
Qm Puissance ractive consomme par linductance magntisanteQXr Puissance ractive consomme par la ractance de fuite au rotor.
a,b.c Systme daxes au statora',b.c' Systme daxes au rotord,q,0 Systme daxes dans le rfrentiel de Park, Systme daxes dans le rfrentiel de ClarkeTem, Couple lectromagntiqueTmc, Couple mcanique disponible larbreTfrot Couple frottementJ Inertie
Rs Rsistance de phase au statorRr Rsistance de phase au rotorRF Rsistance pour les pertes ferLs Inductance de fuite au statorLr Inductance de fuite au rotorLm Inductance magntisanteXr Ractance au rotor sXs Ractance au stator
Xm Ractance magntisanteXr Ractance au rotor s rapporte au statorRr Rsistance au rotor rapporte au statorEs Tension lectromotrice au statorEr Tension lectromotrice au rotorVs Tension au statorIs Courant au statorVr Tension au rotorIr Courant au rotorVr, Tension au rotor rapporte au statorIr Courant au rotor rapport au stator
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
15/125
xiv
Introduction
La machine asynchrone double alimentation (MADA) est trs populaire puisquellebnficie de certains avantages par rapport tous les autres types vitesse variable, son
utilisation dans la chaine de conversion lectromcanique en tant que arognrateur ou
moteur a connu une croissance spectaculaire au cours des dernires annes. En effet, le
convertisseur dnergie utilis afin de redresser-onduler les courants alternatifs du rotor a
une puissance nominale fractionnaire de celle du gnrateur, ce qui rduit son cout parrapport aux topologies concurrentes.
Le travail prsente des outils numriques pour driver les lois de commande permettant la
MADA de fonctionner sur ses points de fonctionnement tout en optimisant ses
performances. Ces lois peuvent tre efficacement utilises dans un environnement de
conception globale et optimale de la chaine de conversion lectromcanique utilisant la
MADA. La structure du rapport est la suivante :
Dans le chapitre I nous dcrivons travers les concepts physiques de base la description du
fonctionnement de la MADA en mode moteur (Hypo et Hypersynchronisme ) et gnrateur
(Hypo et Hypersynchronisme). Nous expliquons comment les grandeurs de contrle
accessibles au rotor peuvent contrler lcoulement de puissance active et ractive dans lamachine.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
16/125
xv
Le chapitre IV prsente une approche analytique base sur le circuit quivalent simplifi
pour dterminer lexpression symbolique des lois de commande. Par la suite, nous
dveloppons un outil de simulation dans lenvironnement Matlab/Simulink, ce dernier sera
exploit pour valider les rsultats analytiques et les rsultats doptimisation.
Le chapitre V prsente les limites de fonctionnement de la MADA dans le plan couple-
vitesse en se basant sur les rsultats doptimisation qui dcoulent dune stratgie de
commande couple maximal. Nous proposons par la suite des fonctions objectifs quipermettent doptimiserpar exemple le rendement, ou la consommation dnergie ou encore
la taille du convertisseur. Et Nous concluons ce chapitre par une tude comparative qui
permettra de dduire le type de charge la mieux adapte pour une stratgie de commande
couple et facteur de puissance imposs.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
17/125
1
Chapitre I : Machine asynchrone rotor bobin
double alimentation.
I.1.IntroductionDans ce chapitre, nous allons prsenter une introduction sur la machine asynchrone rotor
bobin double alimentation et son intrt dans les applications requrant de la vitesse
variable. Nous allons dcrire travers les concepts physiques de base rgissant le
fonctionnement de tout type de machine lectrique le principe de fonctionnement de la
MADA, nous expliquerons comment les grandeurs de contrle accessibles au rotor peuvent
contrler le couple lectromagntique, la vitesse et le facteur de puissance lorsque la
MADA fonctionne en mode moteur (hypo et hypersynchrone) et en mode gnrateur
(hypo et hypersynchrone). Nous aborderons la fin de ce chapitre le transfert de puissance
dans la machine dans ces deux modes de fonctionnement.
I.2.Machine asynchrone double alimentation de type rotorbobin
I.2.1. Constitution de la machine asynchrone rotor bobinLa machine asynchrone rotor bobin prsente un stator analogue celui des machines
i h l i i l l d l i il i
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
18/125
2
Figure I-1: Structure du stator et des contacts rotoriques de la machine asynchrone rotorbobin.
I.2.2.
Configuration du systme vitesse variable avec machineasynchrone double alimentation de type rotor bobin
partir de la constitution de la machine asynchrone rotor bobin tablie dans le
paragraphe prcdent, nous concluons que cette machine permet dtre alimente par deux
sources de tensions triphases diffrentes, cependant, la nature de ces sources na pas t
prcise (convertisseur ou rseau). Cette accessibilit dalimentationpar le stator et le rotor
offre plusieurs possibilits de configurations.
La littrature atteste quil nexiste pas une configuration idale pour toutes les applications,
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
19/125
3
Figure I-2: Configuration du systme retenue pour ltude.
Les autres lments utiliss dans cette configuration sont : Le multiplicateur qui permet dadapter la faible vitesse de rotation de la turbine
(10~20rpm) aux vitesses leves de la MADA.
Le convertisseur du ct rseau qui est souvent contrl pour oprer un facteur de
puissance unitaire et pour rguler la tension DC.
I.2.3. Intrt de la MADA
La connexion directe des machines asynchrones au rseau oblige la vitesse de rotation
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
20/125
4
de puissance travers le rotor. La prsence de ce convertisseur permet de contrler la
puissance la sortie du gnrateur et de faire varier la vitesse. Linconvnient de ce
systme et la prsence de balais au rotor, ce qui demande un travail de maintenance plus
important.
Pour une application olienne o lutilisation de la MADA est intense, la vitesse de
rotation du rotor est rgle en fonction de la vitesse du vent. En effet la MADA permet
un fonctionnement en gnratrice hyposynchrone et hypersynchrone. L'intrt de la
vitesse variable pour une olienne est de pouvoir fonctionner sur une large plage de
vitesses de vent, ce qui permet de tirer le maximum de puissance possible, pour chaque
vitesse de vent [3].
Partant de ces constats, la configuration lectrique des arognrateurs utilisant les
machines asynchrones ont subi une grande volution, ce qui a men aujourdhui un e
utilisation intense de la MADA dans 80% des arognrateurs installs [4] (Figure I.3).
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
21/125
5
I.3.Principe de fonctionnement
I.3.1.
Production du couple lectromagntiqueQuand le stator est aliment par une source triphase quilibre, les courants instantans
circulant dans les trois phases de linduit crent une force magntomotrice Fs qui tourne
une vitesse s=s p. Du cot rotor, on dispose dun enroulement triphas branch une
source alternative ayant une frquence fr et qui produit une force magntomotrice
tournante Fr une vitesse r=r p par rapport au rotor. Pour que le couple moyen soitconstant lorsque le rotor tourne par rapport au stator, il est impratif que les forces
magntomotrices restent synchrones. Ceci impliquerait que le rotor doit lui-mme tourner
une vitesse de s- r. Toute autre vitesse produit un glissement continuel des ples du
rotor par rapport aux ples du stator. Le couple moyen serait alors nul et la machine
sarrterait[5].
La force magntomotrice rsultante F est la somme de la force magntomotrice Fr et la
force magntomotrice Fs, en notation phaseur on a:
FrFsF (I.1)Le flux magntisant rsultant dans lentrefer cre par la force magntomotrice rsultante a
une valeur efficace m.Les amplitudes des forces magntomotrices Fr et Fs sont proportionnelles aux courants qui
les crent et au nombre de spires des enroulements :
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
22/125
6
Si on prend comme valeur algbrique de la phase du courant Ir, la valeur algbrique du
couple est exprime par lquation:
)-2
sin(.. FFT rem (I.5)
La Figure I.4 prsente le diagramme vectoriel des forces magntomotrices avec le
dphasage entre Fr et F en mode moteur et gnrateur.
Figure I-4: Diagramme vectoriel des forces magntomotrices
On peut bien voir quen agissant sur lamplitude et la phase du courant au rotor Ir, on arrive
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
23/125
7
Figure I-5: Circuit magntique de la machine
La Figure I.6 reprsente les diffrents enroulements et les flux prsents lintrieur de la
structure de la MADA.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
24/125
8
I.3.2. Fonctionnement en hypo et hyper synchronisme
On dfinit le glissement :
s
r
s
r
s
ss
f
fg
-- (I.6)
On en dduit que :
sg ).1( (I.7)
Si la source connecte au rotor cre une force magntomotrice Fr qui tourne dans le sens
contraire du sens de rotation de la force magntomotrice Fs, le glissement devient ngative
et le rotor tournera plus vite que le champ tournant cre par le stator s , la machine est
dite en fonctionnent hypersynchrone.
Dans le cas ou la source connecte au rotor cre une force magntomotrice Fr qui tourne
dans le mme sens que le sens de rotation de la force magntomotrice Fs, le glissement est
positive et le rotor tournera moins vite que le champ tournant cre par le stator s , la
machine est dite en fonctionnent hyposynchrone [5].
Dans la machine asynchrone cage classique, un signe ngatif du glissement traduit un
fonctionnement gnrateur de la machine, ce qui peut porter confusion par rapport la
comprhension du principe de fonctionnement de la MADA. Dans la machine asynchrone
doublement alimente, le signe de glissement traduit un fonctionnement en hypo ou
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
25/125
9
Figure I-7: Circuit lectrique au rotor
Er: Tension efficace lectromotrice induite par le champ du rotor dans un
enroulement rotorique.
Vr : Tension efficace de la source alternative connecte au rotor.Rr, Lr : Paramtres du circuit du rotor.
A une pulsation 0r= , la force magntomotrice au rotor Fr est stationnaire car la valeur
efficace de la tension induite dans les enroulements du rotor est nulle (Er=0), la source de
tension extrieure connecte au rotor est une tension continue qui dlivre un courant
continu:
rr
VI (I.8)
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
26/125
10
I.3.3. Fonctionnement moteur et gnrateur
Pour un fonctionnement en gnratrice, la MADA requiert un couple sur larbre de la
machine dans le mme sens que le sens de rotation du champ tournant Fs. Leffet de ce
couple provoque un dcalage en avant des ples du rotor par rapport aux ples du stator et
par consquent la force magntomotrice du rotor Fr est en avance sur les forces
magntomotrices Fs et F (Figure I.8). Le couple lectromagntique de la machine qui
sexerce sur le rotor devient un couple rsistant dans le sens contraire du sens de rotation
de la machine [5].
Pour un fonctionnement en moteur, la force magntomotrice rsultante F est en avance sur
la force magntomotrice Fr. Le couple sur larbre de la machine est un couple rsistant
dans le sens contraire de la vitesse de rotation du champ tournant Fs et le couple
lectromagntique Temde la machine est un couple moteur dans le mme sens que le sens
de rotation.Chaque mode de fonctionnement requiert une commande approprie des tensions
rotoriques, ce qui permet de grer le champ magntique lintrieur de la machine et offrir
ainsi la possibilit de fonctionner en hyper ou hyposynchronisme aussi bien en mode
moteur quen mode gnrateur.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
27/125
11
I.4.Transfert de puissance dans la MADALa prsence du convertisseur entre le rotor et le rseau permet de contrler la puissance
entre le stator et le rseau. La Figure I.9 montre les diffrentes configurations de
fonctionnement de la machine asynchrone double alimentation dont le stator est reli
directement au rseau et le rotor est reli au rseau par l'intermdiaire du convertisseur. Prs
est la puissance dlivre au rseau ou fournie par le rseau, Ps, la puissance transitant par le
stator, Pr, la puissance transitant par le rotor, et Pmec, la puissance mcanique.
Pour le transfert de puissance, nous distinguons quatre cas possibles [7] :
Lorsque la machine fonctionne en moteur, la puissance est fournie par le rseau au
stator. Si la vitesse de rotation est infrieure au synchronisme, la puissance Pr
Puissance de glissement est renvoye sur le rseau, c'est le fonctionnement
moteur hyposynchrone. Les conditions mathmatiques qui traduisent cefonctionnement en ngligeant tout les pertes sont :
g>0, PS>0, Pmec>0 , PR=g.PS>0.
La machine asynchrone cage classique peut avoir ce fonctionnement, cependant la
puissance de glissement est alors dissipe en pertes Joule dans le rotor.
En mode moteur hypersynchrone, une partie de la puissance absorbe par le rseau
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
28/125
12
En mode hypersynchrone, la totalit de la puissance mcanique fournie la machine
est transmise au rseau aux pertes prs par le rotor et le stator.
Les conditions mathmatiques sont les suivants :
g
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
29/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
30/125
14
Chapitre II : Modlisation en rgime permanent de la
machine asynchrone double alimentation
II.1. IntroductionAprs avoir introduit le principe de fonctionnement de la machine asynchrone double
alimentation, ce chapitre sintresse la mise en place dun modle lectrique satisfaisantafin de lexploiter dans un contexte doptimisation.
Lcriture des quations lectriques en rgime permanent permet dtablir un circuit
quivalent complet en "T" de la machine, qui tient compte de tous les lments du circuit.
Nous proposons de transformer ce schma pour le remplacer par un schma quivalent en
"L", plus simple utiliser. Ensuite, nous mettons en vidence des hypothses pour
simplifier davantage ce schma.
Dans la dernire partie, nous allons prsenter le bilan de puissance active et ractive, puis
formuler lexpression du couple et du rendement de la machine partir du circuit
quivalent complet en "T".
II.2. Schma quivalent complet en rgime permanentPour tudier un schma lectrique quivalent des enroulements statorique et rotorique, il
f b l l i d b d ll i i ll i i i l
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
31/125
15
La force lectromotrice Er(t) induite par le champ dans un enroulement rotorique de Nr
spires sexprime de la mme faon:
)sin(..2..)(
)( tNdt
tdNtE rmrr
mrr
(II.2)
La seule diffrence par rapport au calcul prcdent provient du fait que le rotor tourne la
pulsation r. En consquence, relativement au rotor, le champ tourne donc une pulsation :
(s-r)
Ces quations montrent que les tensions statorique et rotorique sont dans le rapport deg.Nr Ns. Les frquences au stator et au rotor sont diffrentes : fr=g.fs.
Ces constatations conduisent une machine se comportant comme un transformateur dont
les caractristiques sont les suivantes (Figure II.1) :
Rapport de transformation en tension :
vmmgNs
Nrg
Es
Er .. (II.3).
Rapport de transformation en frquence :
f
frg (II.4)
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
32/125
16
Figure II-2: Schma monophas quivalent de la machine asynchrone doublealimentation relle.
La connaissance du transformateur permet de dcrire plus prcisment les diffrents
lments du schma quivalent de la machine asynchrone double alimentation :
La rsistance Rfsymbolise les pertes fer dans le stator de la MAS.
Linductance Lmest linductance magntisante du circuit magntique.
La rsistance Rs est celle qui est propre chacun des enroulements
statoriques.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
33/125
17
mNr
Ns
Is
IrIsNsIrNr
1.. (II.5)
Cette relation dfinit le rapport de transformation en courant :
mmIr
Isi (II.6)
Ce rsultat complte les relations dcrivant le transformateur quivalent et peut prendre la
forme synthtique de la Figure II.3.
Figure II-3: Tensions, courants et rapports de transformation
II.2.3. volution du schma quivalent
Contrairement au transformateur parfait, on constate que le rapport de transformation de la
machine parfaite en tension (g.m) et celui en courant (1/m) ne sont pas inverses lun de
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
34/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
35/125
19
machine. Il est priori possible de ramener ce systme un seul systme dquations avec
une pulsation s et utiliser un circuit quivalent commun au stator et au rotor.
En notation phaseur, si on adopte la convention gnrateur au rotor on a :
VrIrLjIrR rrr ....Er (II.13)
En modifiant cette quation en considrant que r =g.s :
VrIrXgjIrRrr
....Er (II.14)
Avec : mErLXr mrsr
..
On en dduit :
VrIrXgjIrRm
g rrm
s
...... (II.15)
Soit :
g
VrIrXjIr
g
R
m r
rm
s
... (II.16)
A la pulsation s, le phaseur est quivalent au phaseur , et la ractance Xrest une ractance de fuite s.
O t d id t i it fi tif l l ti ll d
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
36/125
20
rrrr IXjI
g
R
m
Es... (II.19)
Avec cette reprsentation, le fonctionnement en rgime permanent de la machineasynchrone fonctionnant une vitesse correspondante un glissement g peut tre
caractris au stator par les quations suivantes avec la mme pulsation s :
rrrr
sssS IXjIg
R
m
EsIXjIREsVs ...... (II.20)
On peut y associer le schma quivalent du transformateur de la Figure II.5.
Figure II-5: Schma quivalent de la machine asynchrone la mme pulsation du stator
Ce schma rgle le problme de modlisation des puissances dans la machine car la
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
37/125
21
II.2.4. Schma quivalent sans transformateur
Puisque le schma quivalent prcdent fait appel un transformateur, on peut envisager de
ramener toutes les grandeurs protoriques (secondaire) au stator (primaire). Il ne subsistera
quun modle global vu du stator [6].
En considrant que le circuit magntique nest pas satur, on peut ramener le circuit
secondaire au primaire par une transformation dimpdance, telle que pratique dans le cas
du transformateur, pour obtenir le schma de la Figure II.6.
Figure II-6: Circuit monophas quivalent ramen au primaire
La transformation dimpdance est telle que :
rr XmX .'
2
2
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
38/125
22
remplacer par un schma en "L" plus simple utiliser (Figure II.7) [6]. On montre que le
schma en "T" est exactement gal celui en "L" si :
smmrrss ZZZZZZZ '2'' .. (II.24)
Xm
Xs
Zm
Zsavec 11
Figure II-7: Transformation du schma quivalent en "T" en schma quivalent en "L"
Pour les machines de grandes puissances, la valeur de est approximativement gale 1.
Dans le cas de la machine tudie dans le prsent mmoire et dont toutes les
caractristiques sont donnes au chapitre III, le paramtre est gale 1.023 .Donc si onpose =1 comme seule hypothse simplificatrice on en dduit le schma simplifi en "L" de
l Fi II 8
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
39/125
23
Avec :
fm RXjZm
Xrjg
RrZr
XsjRsZs
.
.
.
(II.25)
On peut faire galement des simplifications sur le schma quivalent en "L" tout en gardant
une bonne prcision :
Dans ce schma on peut ngliger les rsistances du stator et du rotor Rs et Rr,
puisque la puissance de la machine est leve.
On ne tient pas compte de la rsistance magntique Rf car la ractance Xm est
souvent beaucoup plus faible que Rf: on ne tient donc que rarement compte de cette
rsistance qui est considre infinie vis--vis de Xm. Avec cette hypothse
limpdance magntisante est considre purement ractive (Zm=Xm).
Limpdance Zs est nglige par rapport Xm
On obtient alors le schma quivalent simplifi en "L"de la Figure II.9.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
40/125
24
PJs Pertes Joule dans les enroulements du stator
Pmags Pertes magntiques dans la culasse du stator
PJr Pertes Joule dans les enroulements du rotor
Pmagr Pertes magntiques dans la culasse du rotor
Pr Puissance change avec le convertisseur
Pfrot Pertes mcaniques par frottements et ventilation
Pm Puissance mcanique utile disponible sur larbre
Pem Puissance lectrique effectivement convertie en puissance mcanique sur larbre
Le bilan de puissance active du moteur asynchrone est illustr par la Figure II.10.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
41/125
25
Figure II-11: Rpartition de puissance dans la machine
On peut exprimer ces diverses puissances laide du schma quivalentcomplet :
)(cos...
3..3cos...3..3..3 2
222
Irg
VrI
g
RPagIrVrPIRPIRP r
rrrrJrssJs
(II.27)
Les pertes magntiques diminuent avec la frquence [10], celles du rotor P magr sont donc
trs faibles pour les glissements usuels par rapport celles du stator P mags, elles peuvent
tre ngligs :
smags
R
EPet
2
magr .30P (II.28)
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
42/125
26
Figure II-12: Rpartition de la puissance active dans le rotor
II.5. Couple de la machine asynchrone doublealimentation
Le couple lectromagntique en rgime permanent est directement dduit du bilan de
puissance :
cos...3..3..)1(
.)1(
2
rr
rrs
emsem
emem
ag I
gVI
gR
pTT
gT
gPP
(II.30)
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
43/125
27
Avec :
J Inertie de toutes masses tournantes ramenes au rotor de la machine
p Nombre de paires de ples
Tem Couple lectromagntique
Tfrot Couple d aux frottements du systme dentrainement
Tmc Couple mcanique de charge
II.7. Rendement
Le rendement de la MADA est dtermin par lensemble des pertes quelle consomme.
Lexpression du rendement en mode moteur est diffrente de celle en mode gnrateur.
Dans le calcul du rendement, on prend en considration toutes les pertes de la machine, y
compris les pertes magntiques au rotor, car la MADA permet de faire la variation de
vitesse sur une grande plage et en consquence la frquence rotorique pourra prendre des
valeurs leves.
P
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
44/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
45/125
29
II.9. ConclusionCe chapitre a t consacr la recherche du schma quivalent lectrique de la machine
asynchrone double alimentation. Nous avons commenc par la mise en place de
lexpression de la tension induite statorique puis, par analogie, de la tension rotorique. Ceci
nous a conduit tablir leur rapport pour mettre en vidence le comportement dun
transformateur singulier. Se basant sur cette analogie, un premier schma quivalent a t
mis en vidence o interviennent les imperfections, tant magntiques qulectriques.
Aprs les tensions, une tude du rapport de transformation en courant a montr quil nest
pas linverse de celui en tension. Cette transformation a mis en lumire la singularit du
transformateur prcdemment introduit. Nous avons approfondi la modlisation, et on sest
attach valuer les puissances mises en jeu. Nous avons montr que la puissance
lectrique nest pas transmise intgralement, laissant apparaitre une puissance
lectromagntique qui traduit la conversion lectromcanique. Le modle est alors enrichipour tenir compte de cette puissance active.
Pour en terminer avec le schma quivalent, nous lavons fait voluer afin quil soit
pratique. Le nouveau modle utilise une reprsentation mono frquentielle par passage des
lments rotoriques au stator et on sest inspir de la reprsentation quivalente au primaire
dun transformateur. Le couple lectromagntique peut alors tre exprim, tantmcaniquement, qulectriquement pour traduire le comportement lectromcanique de la
machine
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
46/125
30
Chapitre III : Optimisation du couple lectromagntiquede la machine asynchrone double alimentation
III.1. Introduction
Nous parlons doptimisation non linaire lorsquil sagit de rsoudre un systme
dquations non linaires, ou de trouver loptimum dune fonction plusieurs variables.
Une introduction gnrale sur cette mthode et ses limitations ouvre le chapitre. Par la
suite, nous allons lutiliser pour trouver la loi de commande en rgime permanent quil faut
appliquer au convertisseur connect au rotor (RSC) pour une stratgie couple constant et
facteur de puissance GPF impos. Cette mthode sera applique pour une machine double alimentation de 2.5MW. Un outil numrique dvelopp sur Excel permet
dimplanter les quations de modlisation dcoulant du circuit quivalent complet de la
machine. Les rsultats doptimisation (Lois de commande, courants, puissances actives et
ractives, facteur de puissance et rendement) seront prsents sur tout la plage de
fonctionnement de la MADA incluant lhyposynchronisme, le synchronisme etlhypersynchronisme. A ce stade, nouspouvons valider les signes des puissances mises en
jeu par ce qui a t prononc dans la partie de transfert de puissance du chapitre I
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
47/125
31
Newton - Raphson
GaussNewton
QuasiNewton
DavidFletcherPowell
Mthode du nombre dor
Etc
La solution ou loptimum doit tre trouv le plus rapidement possible laide des
contraintes physiques du systme. Les mthodes mentionnes sont des mthodes
numriques itratives qui se distinguent par leur faon de converger vers loptimum et qui
se basent sur la recherche de la direction de descente de plus forte pente pour localiser le
maximum ou le minimum.
En effet, afin doptimiserune fonction partir d'une solution approche, le plus simple est
de se diriger vers le gradient o la pente est plus marque. D'un point de vue mathmatique,
la pente d'une fonction correspond la drive de cette dernire. Si l'on se place dans le
cadre d'une fonction ayant plusieurs paramtres, la drive devient un vecteur : le gradient
de la fonction.
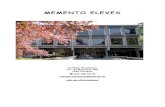
Le principe gnral peut tre expliqu en se basant sur lexemple de la Figure III.1 o le
vecteur optimal ne possde que deux paramtres variables x1 et x2. On part dun pointinitial et nous procdons par des pas qui valent d, donc par changement des paramtres.
L h i d t d t t h i i d t ll t
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
48/125
32
Ces algorithmes doptimisation prsentent donc deux limitations majeures :
Le nombre ditrations peut tre trs lev, ce qui augmente le temps
dexcution.
Rien ne garantit que le minimum ou le maximum trouv soit global.
Figure III-1: Recherche du minimum par la mthode du gradient dans une fonction deuxvariables
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
49/125
33
survient lorsque loptimum trouv est un optimum local ce qui conduit des rsultats errons.
Lune des faons qui contribuent largement llimination des minima et maxima locaux et de
faire partir ce programme avec un vecteur initial (Vr, ) qui se rapproche le plus au vecteur
optimum. Dans certains cas traits lors de loptimisation, nous tions aussi obligs dinitier ce
vecteur au passage du synchronisme ou la vitesse de la machine est gale la vitesse du champ
tournant statorique.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
50/125
34
III.3. Implantation des quations de modlisation dansExcel
Le circuit quivalent permet dexprimer les courants au stator et au rotor en fonction des
variables doptimisation (Vr et ) qui, une fois connus, permettront dexprimer tous les
autres grandeurs et les paramtres essentiels loptimisation savoir: le couple
lectromagntique, les puissances actives et ractives mises en jeu, le facteur de puissance
vu du rseau GPF et vu du stator SPF ainsi que le rendement.
Il est donc essentiel dadopter en rgime permanent une convention de signe sur le sens
des tensions, des courants, des puissances et des dphasages pour pouvoir appliquer les
mthodes dtude et de rsolution des circuits lectriques classiques.
Nous avons adopt une convention rcepteur au stator et une convention gnrateur au rotor. La
Figure III.3 prsente le circuit quivalent de la MADA en respectant les conventions adoptes.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
51/125
35
Figure III-4: coulement de puissance dans la MADA avec les conventions adoptes.
Le courant Ir rapport au stator peut tre exprim par le thorme de Thvenin (FigureIII.5).
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
52/125
36
jXsRs
g
VrIrjXr
g
RrVs
Is
EsIsXsjRsVs
g
VrIrjXr
g
RrEs
)..(0
)..(0
)..( (III.3)
Ces courants doivent toujours rester infrieurs leurs valeurs nominales dsignes, car la
machine ne doit pas dpasser son chauffement nominal, cette condition sera formule
comme contrainte dans tous les problmes doptimisation.
Les paramtres de la machine utilise sont :
Valeurs en unit relle
Puissance nominale, MW 2.5
Tension nominale, V 690
Courant nominal au stator, A 1500
Courant nominal au rotor, A 1700
Frquence Hz 50
Rsistance du stator, 0.0086
Rsistance du rotor, 0.0053
Inductance de fuite du stator,mH 46.50
Inductance de fuite du rotor,mH 90.76
Inductance mutuelle, mH 1996.81
Nombre de pairs de ples 3
Tableau III-1: Les paramtres de la MADA
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
53/125
37
convertisseur (RSC) permet de contrler le couple lectromagntique de la machine ainsi
que le facteur de puissance pour obtenir les performances souhaites.
III.5. Stratgie de commande couple constant etfacteur de puissance impos
La loi de commande en rgime permanent du convertisseur du cot rotor RSC est dcrite
par Vr (V) et (degr), cette loipermet dobtenir la stratgie de commande recherche. Si
on impose la valeur du facteur de puissance au stator SPF et le couple de chargemcanique, le vecteur (Vr, ) devient unique pour chaque point de fonctionnement en
rgime permanent. En ralit cest le facteur de puissance GPF qui est impos par les
spcifications du rseau Figure III.6, ce dernier fixe le facteur de puissance du ct stator
SPF (cos ) pour chaquepoint dopration.
Pour loptimisation nous avons considr quen tout temps en rgime permanent, le couple
lectromagntique est gal au couple de charge mcanique car les pertes mcaniques ont
t ngliges. De plus nous considrons galement que les pertes dans les convertisseurs
sont ngliges, avec ces approximations on peut crire que :
mcemT .P=P mcrs (III.5)
De plus, nous considrons que le convertisseur du cot rseau (GSC) est contrl de faon
fonctionner avec un facteur de puissance unitaire. Avec cette hypothse, la puissance
ractive fournie ou absorb par le rseau est gale la puissance ractive transitant par le
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
54/125
38
Figure III-6: Diagramme de dtermination de la loi de commande par la mthodedoptimisation non-linaire.
Pour une stratgie de commande couple constant et facteur de puissance impos, le
problme doptimisation est formul de la faon suivante:
Pour un GPF=0.95 (en retard)
La fonction objectif est : Oobj=Min ( |Tem-Tmec|).
Les contraintes : IsnIsIrnIr VrnVr Qgrid>0
GnerateurMoteurGPF;95.0
;95.0:
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
55/125
39
Nous avons impos sur larbre de la machine en mode moteur un couple constant gal
10 000N.m et en mode gnrateur un couple gal -10 000N.m. Le facteur de puissance
impos GPF est ngatif en mode gnrateur et positif en mode moteur.
Les rsultats des Figures III.7, III.8 et III.9 sont prsents sur une plage de vitesse qui
comprend un fonctionnement hyposynchrone, synchrone et hypersynchrone.
Lannexe A montre les scripts VBA qui permettent dautomatiser loptimisation avec le
solveur Excel sur tous les points de fonctionnement et ce pour un facteur de puissance
unitaire.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
56/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
57/125
41
0
20 0
40 0
60 0
80 0
1000
1200
0 500 1000 1500 2000
Ir[A]
[rpm]
Ir(moteur)Ir(generateur)
0
50
10 0
15 0
20 0
25 0
0 500 1000 1500 2000
Vr[V
]
[rpm]
Vr(moteur)
Vr(generateur)
0
50
10 0
15 020 0
25 0
30 0
35 0
0 500 1000 1500 2000
[deg
r]
[rpm]
(moteur)
(generateur)
0
20 0
40 0
60 0
80 0
1000
1200
0 500 1000 1500 2000
Is[A]
[rpm]
Is(moteur)
Is(generateur)
-600000
-400000
-200000
0
200000
400000
600000
0 500 1000 1500 2000Pr[W]
[rpm]
Pr(moteur)
Pr (generateur)
-500000
-450000
-400000
-350000
-300000
-250000
-200000
-150000
-100000
-50000
0
0 500 1000 1500 2000
Qr[vars]
[rpm]
Qr (moteur)
Qr(generateur)
1000000
1500000 Ps (moteur)Ps(generateur)
350000400000450000500000 Qs (moteur)
Qs(generateur)
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
58/125
42
0
20 0
40 0
60 0
80 0
10001200
1400
1600
0 500 1000 1500 2000
Ir[A]
[rpm]
Ir(moteur)
Ir(generateur)
0
50
10 0
15 0
20 0
25 0
0 500 1000 1500 2000
Vr[V
]
[rpm]
Vr(moteur)
Vr(generateur)
0
50
100
150200
250
300
350
0 500 1000 1500 2000
[deg
r]
[rpm]
(moteur)
(generateur)
0
20 0
40 0
60 0
80 0
1000
1200
0 500 1000 1500 2000
Is[A]
[rpm]
Is(moteur)
Is(generateur)
-800000
-600000
-400000
-200000
0
200000
400000
600000
0 500 1000 1500 2000Pr[W]
[rpm]
Pr(moteur)
Pr (generateur)
-800000
-700000
-600000
-500000
-400000
-300000
-200000
-100000
0
0 500 1000 1500 2000
Qr[vars]
[rpm]
Qr (moteur)
Qr(generateur)
500000
1000000
1500000 Ps (moteur)Ps(generateur)
200000
-100000
0
0 500 1000 1500 2000
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
59/125
43
Le signe des puissances actives et ractives au rotor Pr et Qr obtenu par optimisation
confirme les propos annoncs au chapitre I, de plus quand la machine fonctionne en
moteur nous avons :
En hypo-synchronisme la puissance Pr>0 et Qr
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
60/125
44
Les courants au rotor et au stator Ir et Is en mode moteur sont lgrement diffrents
ceux obtenus en mode gnrateur car lacheminement de puissance dans la machine est
diffrent pour les deux modes. Pour avoir des courants identiques il faut ngliger les
rsistances Rs et Rr, de cette faon lacheminement de puissance dans la machine ne sera
plus influenc par les pertes joules.
La puissance active Ps est toujours positive en mode moteur et ngative en mode
gnrateur, ce qui vient appuyer ce qui a t prononc au chapitre I. Le signe de la
puissance active Pr dpend la fois du mode de fonctionnement de la machine (moteur ougnrateur) et de la vitesse de fonctionnement (Hypo-Hypersynchronisme).
Le signe de la puissance ractive Qs dpend du facteur de puissance GPF impos. Si ce
dernier est en retard, le signe de la puissance ractive Qs est positif, et sil est en avance, le
signe de Qs est ngatif.
Le facteur de puissance du ct stator SPF nest pas constant et dpend du point defonctionnement. Le seul cas o le SPF demeure constant sur toute la plage de
fonctionnement est lorsque le facteur de puissance GPF impos est unitaire. Lanalyse du
facteur de puissance SPF sera traite plus en dtail aux chapitres IV et V.
Le rendement de la machine samliore lorsque la vitesse augmente, car la puissance
mcanique devient de plus en plus importante.
III.6. Conclusion
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
61/125
Chapitre IV : Calcul des lois de commande et validationpar simulation.
IV.1. IntroductionLa stratgie de commande associe au convertisseur du ct rotor RSC a une influence
directe sur les performances de la MADA. Plusieurs approches sont proposes dans la
littrature pour dterminer les lois de commande permettant de minimiser quelquesfonctions objectifs comme les pertes totales de la machine. La mthode doptimisation non
linaire propose au chapitre prcdent permet datteindre cet objectif, cependant cette
mthode peut conduire des problmes de convergence et augmenter considrablement le
nombre ditrations et le temps dexcution.
Au dbut de ce chapitre, nous allons prsenter une mthode analytique base sur le circuitquivalent simplifi en "L"pour dterminer lexpression symbolique des lois de commande
en rgime permanent. La formulation analytique de ces lois permet de prdire les
performances de la MADA et dviter ainsi lutilisation de la mthode doptimisation non-
linaire. Par la suite nous allons discuter de la fiabilit et lexactitude de cette approche
puisquelle est base sur un circuitquivalent simplifi en "L" qui ne tient pas en compte de
leffet des rsistances.
Dans la dernire partie, nous allons dvelopper un outil de simulation dans lenvironnement
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
62/125
46
IV.2. Approche analytique
IV.2.1. Calcul analytique de la loi de commande avec circuit
quivalent completEn se basant sur le circuit quivalent complet, nous allons dmontrer quil nest possible de
trouver lexpression analytique de la loi de commande que pour le cas o le facteur de
puissance est unitaire GPF=1. Davide Aguglia dans son article intitul Analycal
determination of steady state converter control laws for wind turbines equiped with
doubly fed induction generators [14] a dvelopp un systme dquations complexes
bases sur le circuit quivalent complet de la MADA pour dterminer les lois de commande
au rotor en rgime permanent. Ce systme dquations est tabli de faon faire apparaitre
trois variables intermdiaires :
Valeur RMS du courant Is.
La partie relle de la tension au rotor Vr.
La partie imaginaire de la tension au rotor Vr.
Les entres de ce systme dquations sont:
La caractristique du couple mcanique Tmec().
La tension Vs au stator.
Le facteur de puissance au stator SPF.
La Figure IV.1 illustre la mthode propose par David Agugliaqui permet de formuler
analytiquement la loi de commande au rotor.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
63/125
47Ce calcul analytique se base sur le circuit quivalent de Thvnin de la Figure III.5.
Limpdance et la tension de Thvenin (Zthet Vth) sont exprimes par lquation III.2. Nous
exprimons ces paramtres en termes de partie relle et partie imaginaire.
2222
2222
..
.
)(
...
)(
).(..
XsRs
RsXmj
XsRs
XsXmjXthRthZth
XsXmRs
RsVsXmj
XsXmRs
XsXmVsXmjVthiVthrVth
(IV.1)
On dfinit les variables intermdiaires sous forme complexe en coordonnes cartsiennes
de la manire suivante :
IsycjxccjcsI
VrbjarV
...)sin(..)cos(.
. (IV.2)
Les variables a, b et c sont dtermines par un systme de trois quations. En exprimant le
courant au rotor Ir de deux manires par les circuits quivalents de la Figure IV.3 et IV.5
nous obtenons lquation suivante :
Xmj
XsjRsycjxcVsycjxc
XrXthjgRrRth
gbjaVthijVthrIsIr
.
).)(...(...
).()/(
)/).((.Im
(IV.3)
Cette quation mne un systme de deux quations, une pour la partie relle et lautre
pour la partie imaginaire du courant au rotor Ir.
La troisime quation est obtenue par lquation mcanique du mouvement et lquation
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
64/125
48Le carr du module du courant Ir est
222)
.....()
.....(
Xm
XsycRsxcVsyc
Xm
RsycXsxcxcIr
(IV.6)
La puissance apparente Sr qui passe travers le convertisseur est exprime par :
)]....
..(....
.[)..(3..3 *
Xm
XsycRsxcVsycj
Xm
RsycXsxcxcbjarIrVrS (IV.7)
La puissance Pr qui contrle le couple lectromagntique est exprime en fonction des
variables a, b et c, cette dernire reprsente la partie relle de Sr.
XmbXsycaRsycaXsxcbRsxcVsbbycaxcrSal ..............3).....(3)(RePr (IV.8)
Le couple lectromagntique est exprim par lquation:
).............
....
))....
.()....
..(((.
..3 22
Xm
bXsycaRsycaXsxcbRsxcVsbbycaxc
Xm
XsycRsxcVsyc
Xm
RsycXsxcxcRr
g
pTmec
s
(IV.9)
Le couple est exprim en fonction des variables a, b, c et les paramtres de la machine. Les
quations (IV.3) et (IV.9) forment un systme dquations non linaires trois variables.
Analytiquement, lexpression symbolique peut tre trouve en utilisant le logiciel
Mathematica. Dans le cas dun facteur de puissance SPF unitaire, la loi de commande en
rgime permanent peut tre facilement obtenue sans mme aucun recours aux logiciels decalcul mathmatique. En effet, lorsque SPF=1, les paramtres x et y prennent
i l l 1 0 i i lifi l d i l i l
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
65/125
49En se basant sur le circuit quivalent simplifi en "L" de la Figure II.9, lapplication de la
loi de Kirchhoff aboutit lquation suivante:
XrXsXAvec
bjagXjdjcVs
:
)..(1
.)..(0 (IV.12)
Lquation IV.12 mne un systme de deux quations linaires, une pour la partie relle
et lautre pour la partie imaginaire :
Xcgb
VsXdga
..
)..(
(IV.13)
Lapplication de la loi des nuds aboutit lquation suivante:
).(
Im
Xm
VsdjcIs
IrIs
(IV.14)
Le facteur de puissance SPF au stator est une entre du systme qui sera par la suite estimpour chaque point dopration en rgime permanent. De lquation (IV.14) on dduit une
autre quation linaire deux variables (d, c) et les entres du systme (SPF, Vs) ainsi que
le paramtre Xm de la machine :
)_(:1)_(:1:
))((costan.
).(
))((costan 11
avanceenGPFetretardenGPFAvec
Xm
Vs
SPFgcdc
Xm
Vsd
SPFg
(IV.15)
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
66/125
50Daprs les quations (IV.13), (IV.15) et (IV.19) on obtient lexpression des variables
recherches :
Xm
Vs
TmcSPFVspd
TmcVsp
c
TmcVsp
Xgb
Xm
XVsTmcSPFVsp
Xga
s
s
s
s
)).(tan(cos...3
...3
...3
..
)]1())..(tan(cos...3
..[
1
1
(IV.20)
Lexpression de la loi de commande est:
)
)1())..(tan(cos...3
.
...3
.
arctan()
...3
)).(tan(cos...3
arctan(
))Re(
)Im(arctan(-)
)Re(
)Im(arctan(
)21.(...3
.)1()).(tan(cos
..3
..
)Im()(Re
1
1
22
1
22
Xm
X
VsTmcSPFVsp
X
TmcVsp
X
TmcVsp
Xm
VsTmcSPF
Vsp
Vr
Vr
Ir
Ir
IVTmcVsp
X
Xm
XVsTmecSPF
Vsp
Xg
VrVrelVr
s
s
s
s
ss
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
67/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
68/125
52O f peut reprsenter une tension, un courant ou un flux magntique, est langle entre
laxe de la phase a et laxe d (axe direct) du rfrentiel de Park (voir Figure 4.2). Lindice q
reprsente laxe de quadrature et lindice 0 laxe homopolaire. Le facteur 2/3 est prsent
dans ce type de transforme pour permettre de conserver les amplitudes des courants,
tensions et flux, par contre il faudra faire attention dans le calcul des puissances et des
couples dont leurs valeurs ne sont plus conserves, qui vont ncessiter dun facteur 3/2.
La transforme inverse de Park, qui permet de revenir dans le rfrentiel classique des
phases triphas est dfinie comme suit [15]:
0
1)3
.2sin()
3
.2cos(
1)3
.2-sin()
3
.2-cos(
1)sin()cos(
.3
2 1-
f
fq
fd
P
fc
fb
fa
fc
fb
fa
(IV.30)
La reprsentation de Park de la machine asynchrone est schmatise la Figure IV.2 .Lesaxes magntiques d et q sont perpendiculaires entre eux et laxe 0 (ou homopolaire) lest
par rapport au plan dcrit par d et q, il est dessin ct pour des raisons de clart visuelle.
Les angles da et dA reprsentent respectivement langle lectrique entre la phase "a"
statorique et laxe d de Park et celui entre la phase "A" rotorique et laxe d de Park.
Lenroulement homopolaire du rotor nest pas reprsent cause de son influenceinexistante dans notre systme qui est quilibr [12].
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
69/125
53
Figure IV-2: Reprsentation de la machine asynchrone dans le formalisme de latransforme de Park
IV.3.2. Valeurs relatives (Systme en p.u)
Les valeurs relatives, exprimes en valeur unitaire, p.u, ou en pourcentage, se dfinissant
comme le rapport entre les valeurs qui prvalent dans une situation donne et les valeurs de
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
70/125
54
Tableau IV-1:Grandeurs de rfrence pour la transformation en p.u
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
71/125
55Cette vitesse doit correspondre celle trouve par optimisation. La validation comprend
aussi la loi de commande, le couple lectromagntique, le facteur de puissance au stator, les
courants au stator et au rotor et les puissances actives et ractives mises en jeu.
En mode moteur et dans le cas o le couple de la charge est proportionnel la vitesse ou au
carr de la vitesse, on fait simplement varier le couple lectromagntique par rgulation du
courant au rotor (Figures IV.3.a et IV.3.b).
Dans le cas dun couple de charge constant, il est impossible de rguler le couple en
imposant directement les courants rotoriques de rfrence, il faut implanter un rgulateur
cascade vitesse-couple pour maintenir la stabilit au point de fonctionnement. Pour viter
cette dmarche, nous avons procd de la manire suivante : pour chaque point quon veut
valider, nous simulons avec un couple de charge linaire qui passe par ce point et lorigine
O des axes (Figure IV.3.c), la caractristique de la droite du couple mcanique sera
modifie pour le point quon veut valider.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
72/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
73/125
57
Figure IV-5: Artifice de dmarrage de la machine en mode gnrateur au cas dun coupleproportionnel la vitesse ou au carr de la vitesse
IV.3.3.2. Mesure des grandeurs
Pour mesurer les valeurs efficaces des grandeurs rotoriques telles que le courant Ir ou la
tension Vr, nous tions obligs deffectuer deux simulations. En effet, le bloc ddi au
calcul de la valeur efficace prend comme paramtre la frquence du signal, car il doit
effectuer une intgrale sur la priode. Ceci ncessite la connaissance pralable de la
frquence rotorique. La premire simulation vise exclusivement la mesure la plus prcise
de cette frquence, autrement les mesures seraient errones.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
74/125
58
Figure IV-6: Reprsentation du vecteur spatial dans le rfrentiel diphas (,)
La Figure IV.7 schmatise la mthode utilise pour calculer la frquence rotorique :
Figure IV-7: Schma bloc pour le calcul de la frquence fr
IV.3.3.3. Gnration des courants rotoriques de rfrence et
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
75/125
59optimisation pour ce point, on conclut quil est valid et que la mthode doptimisation
donne les rsultats attendus.
Ces courants rotoriques ont une pulsation s car dans la modlisation de la machine en
rgime permanent tous les lments ont t rapports du ct stator. De plus il faut
multiplier ces courants par un gain de -1 puisque le sens du courant I r adopt dans la
modlisation en rgime permanent au chapitre II est loppos de celui utilis par la
modlisation de la machine dans SimuPowerSystems. Par la suite, nous avons appliqu la
transformation de Park sur ces courants triphass, langle utilis pour cette transformation
est celui entre laxe de la phase du stator et le rfrentiel de Park. La Figure IV.8
schmatise les transformations appliques sur le courant Ir dune phase de la machine:
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
76/125
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
77/125
61IV.3.3.5. Modlisation du convertisseur connect au rotor
Les grandeurs la sortie du rgulateur (u*d, u*q) sont transformes en triphas pour gnrer
les consignes pour les sources de tension contrles qui modlisent le convertisseur [17].
Ces derniers imposent la frquence et lamplitude de tensions triphases au rotor [Vra, Vrb,
Vrc].
Dans les simulations qui sintressent au comportement dynamique du systme, le
convertisseur doit tre modlis par son modle dtaill qui se trouve dans la librairie
SimPowerSystems, accompagn dun modulateur sinusodal. Ceci requiert la comparaison
dun signal sinusodal ayant une amplitude et une frquence dsires avec un signal
triangulaire de haute frquence et damplitude unitaire. Le rsultat de cette comparaison
permet de gnrer les signaux de commande pour chaque interrupteur du convertisseur [5].
Dans le cas de ce mmoire, nous avons fait abstraction sur la modulation (PWM), le
convertisseur a t modlis simplement par trois sources de tensions contrles. Ce
modle permet deffectuer des simulations plus rapidement pour atteindre le rgimepermanent, et la dynamique du systme dpendra seulement des constantes de temps
tablies par la charge et les caractristiques de la machine. Le choix de modlisation du
convertisseur par son modle moyen est justifi par les objectifs quon veut atteindre. La
Figure IV.11 schmatise la modlisation du convertisseur sur Simulink.
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
78/125
62Par la suite nous allons comparer les rsultats analytiques obtenus avec le circuit quivalent
en "L" simplifi sans rsistances avec ceux doptimisation obtenus sans effet des
rsistances.
IV.3.4.1. Validation des rsultats doptimisation par simulation
Nous avons valid deux points pour chaque mode de fonctionnement de la machine
(moteur et gnrateur), le premier en hyposynchronisme et le deuxime en
hypersynchronisme.
Les entres du modle doptimisation sont: la vitesse dopration, le couple de la charge, etle facteur de puissance GPF. Loutil de simulation conu pour la validation a pour entres :
Le module et la phase du courant Ir et la caractristique du couple mcanique. Le tableau
IV-2 prsente les rsultats comparatifs en pourcentage entre loptimisation et la simulation.
Mode moteur Mode gnrateur
Hyposynchronisme
%
Hypersynchronisme
%
Hyposynchronisme
%
Hypersynchronisme
%
Couple mcanique 0.04 0.08 0.03 0.02
Facteur de puissance
GPF
0 0 0 0
Vitesse 0.04 0.06 0.79 0
Tension Vr 0.03 0.09 0.84 0.05
Dphasage 0 0.015 0 0
63
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
79/125
63La validation sur toute la plage de vitesse pour un couple mcanique proportionnel la
vitesse (Tmc=k.) et un facteur de puissance imposs (GPF=1) est prsente la Figure
IV.2. Nous concluons que les rsultats doptimisation sont valids pour tous les points de
fonctionnement.
Puisque la mthode doptimisation fournit la solution exacte, elle va tre utilise pour faire
une analyse comparative entre celle-ci et la mthode analytique.
Lannexe B prsentele schma Simulink de la commande de la MADA et le script Matlab
qui permet dautomatiser la simulation.
64
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
80/125
64
65
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
81/125
65IV.3.4.2. Validation des rsultats analytiques
Nous avons valid un point en hypersynchronisme en mode moteur et un point en
hyposynchronisme en mode gnrateur.
Les entres du modle doptimisation et analytique sont les mmes : la vitesse dopration,
le couple de la charge, et le facteur de puissance GPF.
Le tableau IV.3 prsente les rsultats comparatifs en pourcentage entre lapproche
analytique et la mthode doptimisation. Lannexe B prsente le script Matlab qui permet
de trouver les lois de commande en mode moteur et gnrateur avec lapproche analytique.
Mode moteur (Hypersynchronisme) Mode gnrateur (Hyposynchronisme)
Rsistance non
nglige
%
Rsistance
nglige
%
Rsistance non
nglige
%
Rsistance
nglige
%
Tension Vr 0.02 2.15 0.71 2.24
Dphasage 1.54 0.34 0.39 0.22
Courant Ir 3.10 10 1.19 0.38
Courant Is 2.39 0 0.81 0
Facteur de puissance SPF 0.01 0 0.11 0.01
Puissance active Pr 2.56 0 3.62 0
Puissance ractive Qr 17.91 4.19 0.38 2.34
Puissance active Ps 2.13 0 0.7 0
P i i Q 2 44 0 5 42 0
66
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
82/125
66
67
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
83/125
67Lestimation du facteur de puissance SPF par lapproche analytique donne une valeur assez
proche avec une erreur qui ne dpasse pas 1% par rapport la valeur exacte, cette erreur, bien
quelle soit faible, elle a un impact non ngligeable sur le dimensionnement du convertisseur
surtout aux hautes vitesses ou les pertes sont plus importantes.
Une autre faon de valider ces rsultats serait dimplanter la loi de commande obtenue
analytiquement dans loutil numrique doptimisation (fichier Excel). En effet, si on
impose une valeur de couple de 5000N.m et un facteur de puissance GPF=0.95, la mthode
analytique donne les rsultats suivants pour la vitesse de 900 rpm:
Tableau IV-4: Rsultats analytiques pour un couple et un GPF impos
En implantant cette loi de commande dans le fichier Excel ddi loptimisation, on obtient les
rsultats du tableau suivant :
68
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
84/125
68
IV.4. ConclusionLa premire partie de ce chapitre a t consacr pour trouver une approche analytique
permettant dexprimer symboliquement la loi de commande en rgime permanent et de
prdire les performances de la MADA. Ceci est rendu possible avec les simplifications
apportes au circuit quivalent de la machine.
La deuxime partie avait comme objectif de simuler la machine en mode moteur et
gnrateur pour diffrentes caractristiques du couple mcanique. Nous avons procd la
transformation daxe permettant de rduire le nombre et la variation temporelle des
grandeurs commander. Par la suite, nous avons prsent toutes les techniques de
simulation permettant dviter les problmes dinstabilit pour les deux modes de
fonctionnement et les diffrentes caractristiques du couple mcanique. Cet outil de
simulation nous a permis de valider les rsultats doptimisation non-linaire.
En se basant sur ces rsultats, nous avons fait une analyse comparative entre celle-ci et la
mthode analytique. Nous avons conclu que lapproche analytique est un bon outil
permettant de nous faire viter le processus doptimisation non-linaire qui peut tre
couteux en termes de temps et qui peut conduire des problmes de convergence.
Cette mthode apportera un grand avantage du point de vue pratique, car dsormais elle
peut tre efficacement implante dans un environnement de conception CAO permettant de
dimensionner les diffrents composants du systme dentrainement (Machine,convertisseur, tage rducteur).
69
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
85/125
69
Chapitre V : tude des limites de fonctionnement dans leplan couple-vitesse et adaptation aux types de charge
V.1. IntroductionLes limites de fonctionnement de la machine peuvent renseigner sur le couple maximal, la
puissance maximale, la vitesse maximale, la charge maximale...Etc. Une stratgie de
commande couple maximal permet dexplorer ces limites sur toute la plage de vitesse.
Nous allons imposer par la suite une contrainte sur le rendement pour tudier son effet sur
le facteur de puissance, le couple lectromagntique et la taille du convertisseur et le
compromis qui peut y naitre.
Loptimisation non linaire permet galement dtudier quelques stratgies de commande
qui permettent de maximiser par exemple le rendement, ou doptimiser la consommation
dnergie ou la taille du convertisseur. Pour donner un sens ces rsultats, nous lesaccompagnerons par des analyses, des tudes comparatives et des explications ; ce qui
permettra de mieux apprhender le fonctionnement de la MADA.
Nous fermerons ce chapitre par une stratgie de commande couple et facteur de puissance
imposs pour dduire le type de charge la mieux adapte en termes de rendement et de la
taille du convertisseur.
V 2 Stratgie de commande couple maximal
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
86/125
71
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
87/125
71La premire condition permet davoir deux forces magntomotrices perpendiculaires ce qui
correspond au maximum du couple pour un chauffement donn. La deuxime permet
davoir lamplitude maximale de la force magntomotrice Fsmax. Si les deux conditions sont
runies, le couple obtenu est maximal. Cependant, avec cette stratgie, la machine
synchrone ne peut atteindre un couple maximal et en mme temps fonctionner facteur de
puissance unitaire (Figure V.1). Dans le cas de la MADA, une stratgie de commande
couple maximal permet datteindre les deux la fois (couple maximal et facteur de
puissance unitaire), ce qui reprsente un avantage par rapport aux autres moteurs
lectriques.
Figure V-1: Diagramme vectoriel de la machine synchrone pour un point defonctionnement lintrieur de la zone I
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
88/125
73
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
89/125
73Le problme doptimisation est formul de la manire suivante :
La fonction objectif est
GnerateurTem
moteurTem
);min(
);max(=Obj
Les contraintes : IsnIsIrnIr VrnVr
Gnerateur
moteurGPF
;0
;0:
La dtermination de ces lois de commande permet davoir lenveloppe du couple
lectromagntique de cette machine dj existante, et permet de connatre ces limites de
fonctionnement dans le plan couple-vitesse. Il est donc possible de faire fonctionner la
machine tout point dopration qui existe lintrieur de cette enveloppe par une
commande approprie du convertisseur RSC.
La Figure V.3 reprsente le couple maximis en mode moteur sur toute la plage de vitesse.
Sur le graphique, on distingue deux zones. Chaque zone est marque par une limitation de
deux grandeurs lectriques parmi trois (Ir, Is, Vr).
Zone1 [0, b] : Is et Ir sont en buts leur valeurs maximales et le facteur de
puissance est maintenu unitaire (SPF=1).
Zone 2 [b, max] : Is et Vr sont en buts, et le facteur de puissance nest plus
unitaire (SPF1).
Avec : b=1939tr/min et max=2131tr/min
74
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
90/125
74La production du couple dans une machine tournante nest possible quen prsence de
deux forces magntomotrices, il est reprsent par le produit vectoriel de sF et rF ou F
et rF ou encore F et sF .
srsrem FFFFFFT (II.2)
Ce produit est nul lorsque les deux forces sont alignes et maximal lorsque les deux forces
sont perpendiculaires.
Pour chaque point de fonctionnement, Le solveur trouve les valeurs optimales de Vr et
afin que les deux forces magntomotrices restent perpendiculaires ce qui correspond aumaximum de couple dans la machine pour un chauffement donn. La Figure V.4prsente
le diagramme vectoriel des forces magntomotrices en mode moteur.
75
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
91/125
75
0
100
200
300
400
500
0 500 1000 1500 2000 2500
Vr[V]
m[rpm]
Vr(moteur)
0
50
100
150
200
250
300
350
0 500 1000 1500 2000 2500
[degr]
m[rpm]
(moteur)
Figure V-5: Loi de commande Vr et pour une stratgie couple maximal
Figure V-6: Courantau stator en mode moteur pour une stratgie couple maximal.
La prsentation graphique des phaseurs permet de mieux apprhender le comportement de
la MADA dans cette zone. La Figure V.7 prsente le diagramme vectoriel de la machine en
mode moteur pour un glissement de 0 3 (hyposynchronisme) Pour une tude qualitative
76
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
92/125
76
Figure V-7: Diagramme vectoriel en fonctionnement moteur pour un glissement s=0.3.
Zone 2: Le glissement devient de plus en plus important, et par consquent la limite de
tension Vr est atteinte (Vr=400) une vitesse appele b. Au-del de cette vitesse, le
rapport Vr/s subit une diminution et de ce fait le courant Ir doit sadapter en module et en
phase pour compenser cette diminution et respecter la loi dOhm:
s
Vr
IrXrjIsXsjVs .... . (V.4)
Cela entrainera une dgradation du couple et du facteur de puissance SPF car le courant Is
77
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
93/125
Figure V-8: Diagramme vectoriel en fonctionnement moteur pour un glissement s=-1.11
V.2.2.2. Rsultats doptimisation et analyse
Dans une machine asynchrone, le courant de magntisation Im est associ la force
magntomotrice rsultante F, qui cre le flux dans lentrefer. Le vecteur de courant Im
est donc perpendiculaire Vs cardt
tdtVs
)()(
sVmI (V.5)
En outre, langle entre Im et Is (ouF et Fs) est de /2 ce qui prsente un maximum de
78
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
94/125
Figure V-9: Facteur de puissance SPF&GPF en mode moteur pour une stratgie couplemaximal.
La mthode numrique utilise permet aussi de driver les lois de commande appliquer au
convertisseur RSC pour maximiser le couple lectromagntique en mode gnrateur. Ce
dernier est marqu par les mmes zones mentionnes auparavant.
On prsentera dans les mmes graphiques tout les rsultats doptimisation en mode moteur
et gnrateur (Figure V.10).
79
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
95/125
-20000
-15000
-10000
-5000
0
5000
10000
15000
20000
0 1000 2000 3000Tem[N.m
]
m[rpm]
Tem(moteur)
Tem(gnerateur)
-1,5
-1
-0,5
0
0,5
1
1,5
0 500 1000 1500 2000 2500
GPF&
SPF[N.m
]
m[rpm]
SPF_Moteur
GPF_Moteur
SPF_Gnrateur
GPF_Gnrateur
0
100
200
300
400
500
0 500 1000 1500 2000 2500
Vr[V]
m[rpm]
Vr(moteur)
Vr(generateur)
-100
0
100
200
300
400
500
0 500 1000 1500 2000 2500
[degr
]
m[rpm]
(moteur)
(generateur)
80
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
96/125
En mode gnrateur, la source au rotor se comporte de faon diffrente dpendamment si
on se trouve en hyposynchronisme ou en hypersynchronisme. Compte tenu des conventions
adoptes dans le circuit quivalent de la machine MADA, la source rotorique fournit en
mode gnrateur de la puissance active en hypsynchronisme (Pr0). De plus, la puissance mcanique est inverse et le stator fournit
de la puissance au rseau (Ps
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
97/125
-20000
-15000
-10000
-5000
0
5000
10000
15000
20000
0 1000 2000 3000Tem
[N.m
]
m[rpm]
Tem(moteur)
Tem(gnerateur)
-1,5
-1
-0,5
0
0,5
1
1,5
0 500 1000 1500 2000 2500
GPF&
SPF[N.m
]
m[rpm]
SPF_Moteur
GPF_Moteur
SPF_Gnrateur
GPF_Gnrateur
0
100
200
300
400
500
0 500 1000 1500 2000 2500
Vr
[V]
m[rpm]
Vr(moteur)
Vr(generateur)
-100
0
100
200
300
400
500
0 500 1000 1500 2000 2500
[degr
]
m[rpm]
(moteur)
(generateur)
0
500
1000
1500
2000
0 1000 2000 3000
Ir[A]
m[rpm]
Ir(moteur)
Ir(generateur)
1490
1500
1510
1520
1530
1540
1550
0 1000 2000 3000
Is[A]
m[rpm]
Is(moteur)
Is(generateur)
Figure V-12: Rsultats doptimisation en mode moteur et gnrateur pour une stratgie decommande couple maximal sans effet des rsistances.
82
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
98/125
Lorsque le facteur de puissance est impos GPF=0.95 (en avance), le convertisseur est
alors contraint fournir seul, la puissance ractive la machine et au rseau, par
consquent il doit tre surdimensionn. Cest le pire cas au niveau du couple
lectromagntique et la taille de convertisseur.
Notons que le cas le plus intressant au niveau du couple reste celui ou le facteur de
puissance GPF est unitaire.
Le dimensionnement du convertisseur dpend du facteur de puissance impos. Pour le
rendement, il est parfaitement identique pour les trois cas (Figure V.14).
83
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
99/125
0
0,2
0,4
0,6
0,8
1
1,2
0 500 1000 1500 2000 2500
[rpm]
GPF=1,+0.95,-0.95
Figure V-14: Rendement de la machine en mode moteur pour une stratgie couple maximal et facteur de puissance impos GPF=1, +0.95,-0.95.
V.2.4. Stratgie de commande couple maximal, facteur depuissance impos et contrainte sur le rendement.
Lamlioration du rendement de la machine sur toute la plage de vitesse et une
proccupation importante pour les ingnieurs lectriciens qui se chargent de la conception
et de loptimisation. Dans cette partie une contrainte sur le rendement sera ajoute et son
effet sur le couple lectromagntique et la taille du convertisseur sera galement tudi.
95.08.0:
)_(mod),max(
GPFetContraines
moteureTemObj
Aux basses vitesses, la puissance mcanique est faible, par consquent le rendement est
dgrad. Pour respecter la contrainte sur le rendement, il faut limiter les pertes dans la
machine, ce qui explique que les courants Ir et Is sont rduits. Le couple lectromagntique
84
-
8/11/2019 MADA Les lois de commande en rgime permanent..pdf
100/125
0