
Les Regulateurs Pi
19
-
Upload
ahmed-boussoffara -
Category
Documents
-
view
19 -
download
0
description
Les Regulateurs Pi
Transcript of Les Regulateurs Pi
LES REGULATEURS PIDans le présent paragraphe, nous allons décrire les différents types des contrôleurs dans
l’industrie.
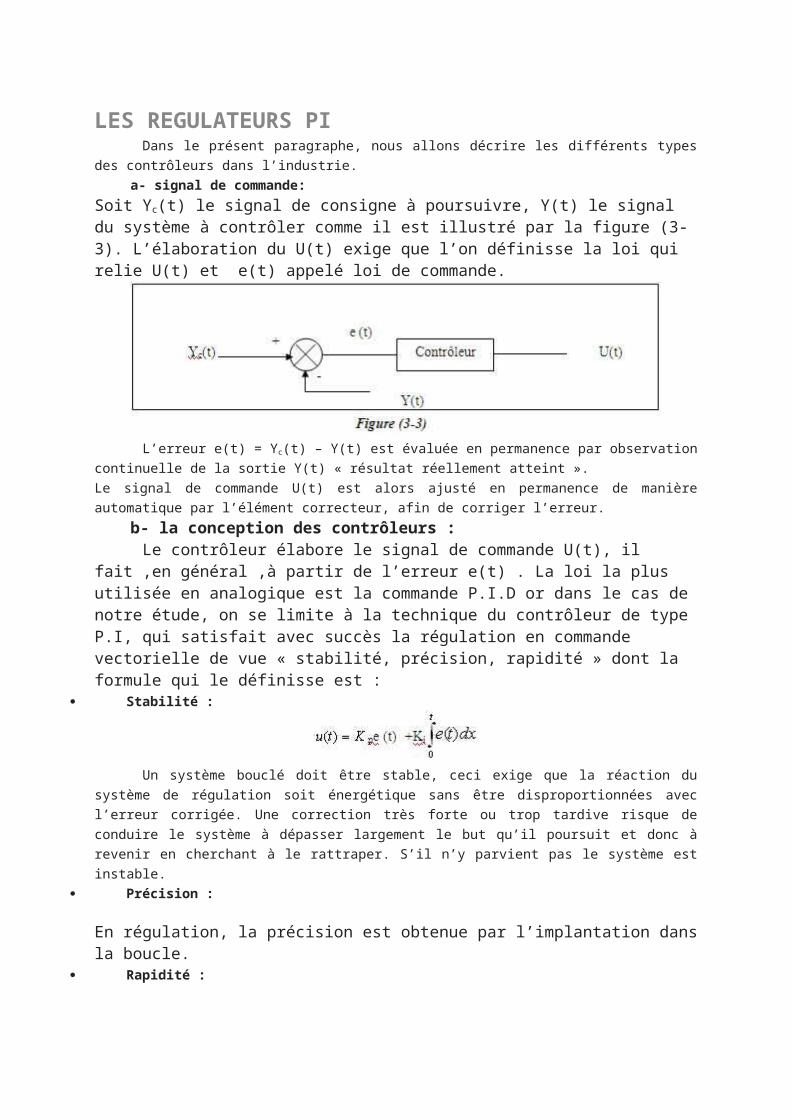
a- signal de commande:Soit Yc(t) le signal de consigne à poursuivre, Y(t) le signal du système à contrôler comme il est illustré par la figure (3-3). L’élaboration du U(t) exige que l’on définisse la loi qui relie U(t) et e(t) appelé loi de commande.
L’erreur e(t) = Yc(t) – Y(t) est évaluée en permanence par observation continuelle de la sortie
Y(t) « résultat réellement atteint ».
Le signal de commande U(t) est alors ajusté en permanence de manière automatique par l’élément
correcteur, afin de corriger l’erreur.
b- la conception des contrôleurs :Le contrôleur élabore le signal de commande U(t), il fait ,en général ,à partir
de l’erreur e(t) . La loi la plus utilisée en analogique est la commande P.I.D or dans le cas de notre étude, on se limite à la technique du contrôleur de type P.I, qui satisfait avec succès la régulation en commande vectorielle de vue « stabilité, précision, rapidité » dont la formule qui le définisse est :
Stabilité :
Un système bouclé doit être stable, ceci exige que la réaction du système de régulation soit
énergétique sans être disproportionnées avec l’erreur corrigée. Une correction très forte ou trop
tardive risque de conduire le système à dépasser largement le but qu’il poursuit et donc à revenir en
cherchant à le rattraper. S’il n’y parvient pas le système est instable.
Précision :
En régulation, la précision est obtenue par l’implantation dans la boucle. Rapidité :
En règle générale, un système bouclé doit répondre rapidement aux variations de sa consigne et effacer rapidement les perturbations « régulation ».Le temps de réaction est bien entendu en relation étroite avec l’inertie propre du processus. Tout les régulateurs, qui seront utilisés dans le présent travail, seront de type proportionnel intégrale (PI) dont la forme est la suivante : Gpi(S)=Kp+Ki/S . Avec : Kp : Coefficient de proportionnalité. Ki : Coefficient de d’intégration.L’ajustement des coefficients Kp et K i étant effectué par simulation numérique.

c- Régulation :Deux régulations de type PI sont utilisés pour régler les courants Idret Iqr ,une
troisième régulation est éventuellement envisagée pour la régulation de vitesse.Les termes (Vd-cp ;Vq-cp ) comme l’indique la figure (3-4) représentant la force
électromotrice de compensation que l’on doit ajouter à la sortie de chaque régulateur et (Vd-cor ;Vq-cor). Ces F.e.m de compensation permettent en outre de découpler la régulation du courant Idret Iqr . D’après le système d’équations (3-7) et (3-8) on aura donc :
La pulsation rotorique de rotation du flux statorique s est calculée en additionnant la pulsation
électrique du stator Ws et la pulsation de glissement W.
Publié par hicham à 18:43 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
MATLAB/SimulinkCompte tenu des possibilités offertes en matière de modélisation et de simulation des
systèmes mixtes (continus et discrets) et la simplicité d'implantation des modèles (linéaires et non
linéaires) grâce à son interface graphique, ainsi que la possibilité d'échange de données entre
simulink et l'espace de travail Matlab, dans lequel le système modélisé sous Simulink peut recevoir
des données de l'espace de travail ou y envoyer des données de sortie. Les études en simulation
présentées dans ce travail ont été menées par Matlab/SimulinkTM.
Simulink est donc un programme additionnel à matlab pour la modélisation et la
simulation des systèmes dynamiques continus et discrets. Il offre de nombreux outils, spécifiques aux
systèmes dynamiques, tout en conservant la puissance et les fonctionnalités de Matlab.
le programme Simulink procède en deux étapes. Dans la première, le système à étudier est
défini par un modèle mathématique développé à cet effet, soit dans le domaine temporel ou par sa
fonction de transfert, puis ce modèle élaboré est alors introduit dans le programme sous formes de
blocs. Alors que la deuxième phase consiste à l'analyse ducomportement du système précédemment défini après avoir spécifié les paramètres de simulation. Simulink possède une bibliothèque de modèles déjà prédéfinis, qui peuvent être facilement modifiés et introduits dans de nouveaux modèles à analyser.Publié par hicham à 17:15 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulationmardi 12 avril 2011
ETUDE DE STABILITE DES SYSTEMES1- Méthodes graphiques
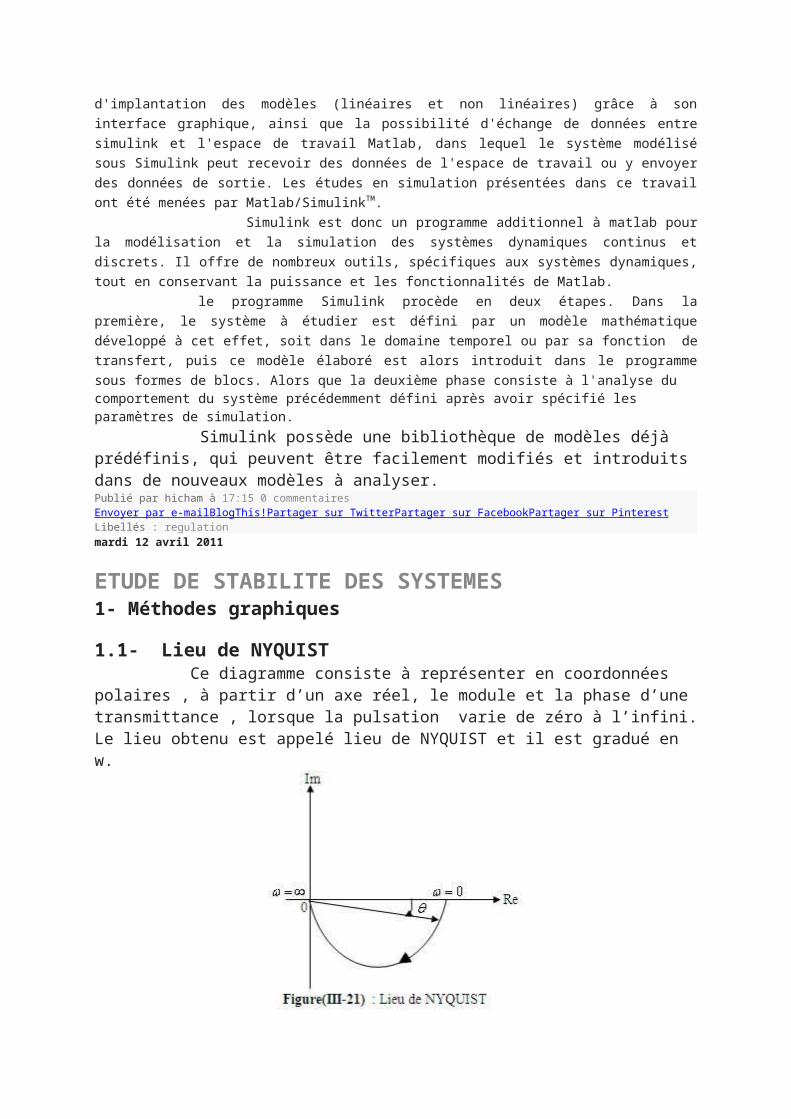
1.1- Lieu de NYQUIST Ce diagramme consiste à représenter en coordonnées polaires , à partir d’un axe réel, le module et la phase d’une transmittance , lorsque la pulsation varie de zéro à l’infini. Le lieu obtenu est appelé lieu de NYQUIST et il est gradué en w.
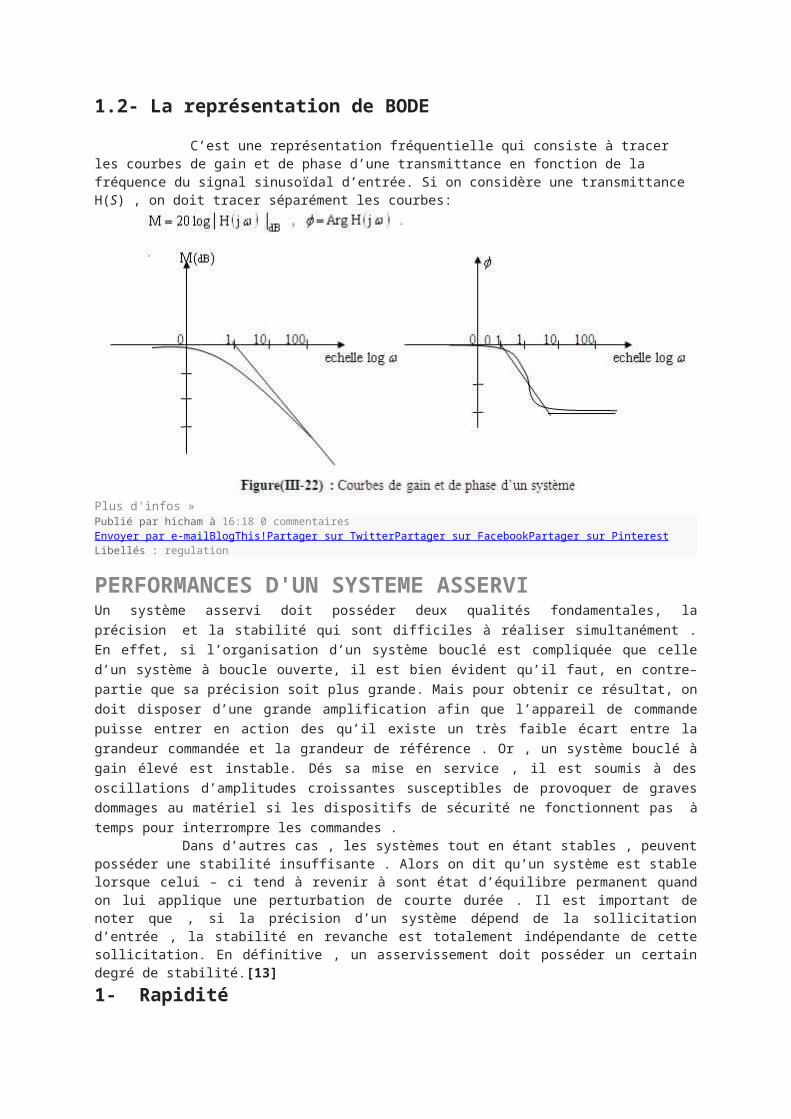
1.2- La représentation de BODE C’est une représentation fréquentielle qui consiste à tracer les courbes de gain et de phase d’une transmittance en fonction de la fréquence du signal sinusoïdal d’entrée. Si on considère une transmittance H(S) , on doit tracer séparément les courbes:
Plus d'infos »Publié par hicham à 16:18 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
PERFORMANCES D'UN SYSTEME ASSERVIUn système asservi doit posséder deux qualités fondamentales, la précision et la stabilité qui sont
difficiles à réaliser simultanément . En effet, si l’organisation d’un système bouclé est compliquée que
celle d’un système à boucle ouverte, il est bien évident qu’il faut, en contre–partie que sa précision soit
plus grande. Mais pour obtenir ce résultat, on doit disposer d’une grande amplification afin que
l’appareil de commande puisse entrer en action des qu’il existe un très faible écart entre la grandeur
commandée et la grandeur de référence . Or , un système bouclé à gain élevé est instable. Dés sa
mise en service , il est soumis à des oscillations d’amplitudes croissantes susceptibles de provoquer
de graves dommages au matériel si les dispositifs de sécurité ne fonctionnent pas à temps pour
interrompre les commandes . Dans d’autres cas , les systèmes tout en étant stables , peuvent posséder une stabilité insuffisante . Alors on dit qu’un système est stable lorsque celui – ci tend à revenir à sont état d’équilibre permanent quand on lui applique une perturbation de courte durée . Il est important de noter que , si la précision d’un système dépend de la sollicitation d’entrée , la stabilité en revanche est totalement indépendante de cette sollicitation. En définitive , un asservissement doit posséder un certain degré de stabilité.[13]
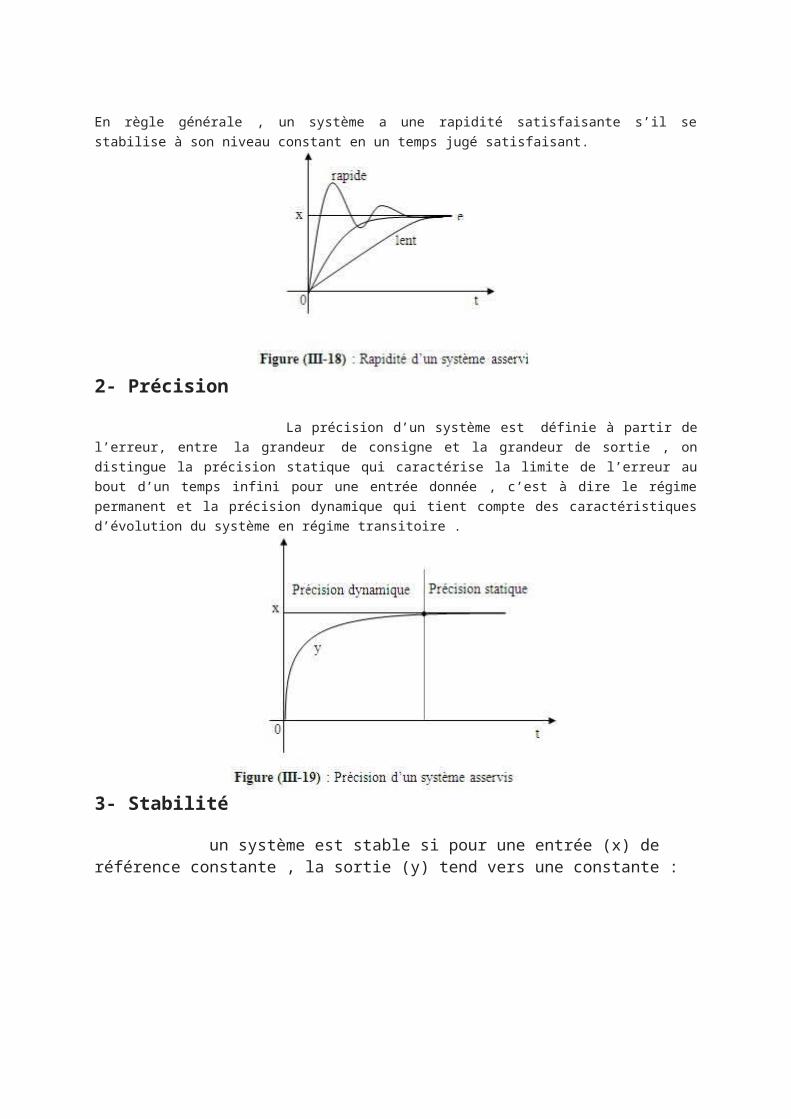
1- Rapidité
En règle générale , un système a une rapidité satisfaisante s’il se stabilise à son niveau constant en
un temps jugé satisfaisant.
2- Précision
La précision d’un système est définie à partir de l’erreur, entre la grandeur de
consigne et la grandeur de sortie , on distingue la précision statique qui caractérise la limite de l’erreur
au bout d’un temps infini pour une entrée donnée , c’est à dire le régime permanent et la précision
dynamique qui tient compte des caractéristiques d’évolution du système en régime transitoire .
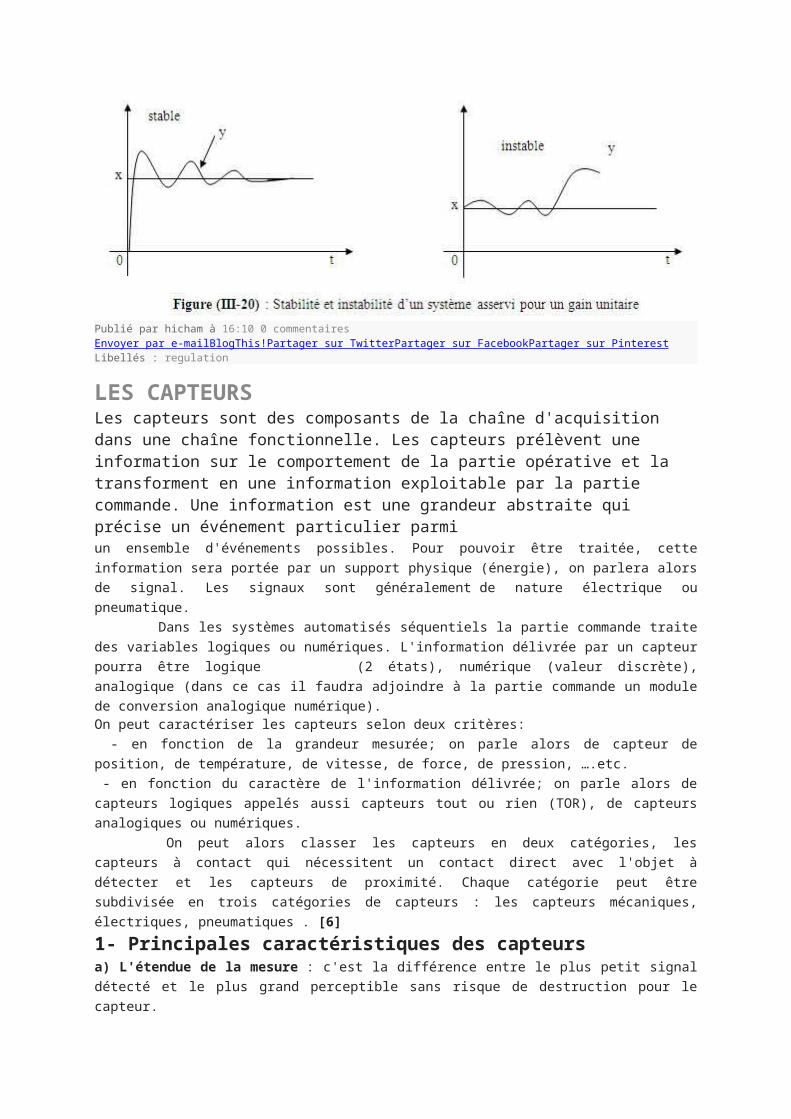
3- Stabilité
un système est stable si pour une entrée (x) de référence constante , la sortie (y) tend vers une constante :
Publié par hicham à 16:10 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
LES CAPTEURSLes capteurs sont des composants de la chaîne d'acquisition dans une chaîne fonctionnelle. Les capteurs prélèvent une information sur le comportement de la partie opérative et la transforment en une information exploitable par la partie commande. Une information est une grandeur abstraite qui précise un événement particulier parmi un ensemble d'événements possibles. Pour pouvoir être traitée, cette information sera portée par un
support physique (énergie), on parlera alors de signal. Les signaux sont généralement de nature
électrique ou pneumatique.
Dans les systèmes automatisés séquentiels la partie commande traite des variables logiques ou
numériques. L'information délivrée par un capteur pourra être logique (2 états), numérique
(valeur discrète), analogique (dans ce cas il faudra adjoindre à la partie commande un module de
conversion analogique numérique).On peut caractériser les capteurs selon deux critères:
- en fonction de la grandeur mesurée; on parle alors de capteur de position, de température, de
vitesse, de force, de pression, ….etc.
- en fonction du caractère de l'information délivrée; on parle alors de capteurs logiques appelés aussi
capteurs tout ou rien (TOR), de capteurs analogiques ou numériques.
On peut alors classer les capteurs en deux catégories, les capteurs à contact qui nécessitent un
contact direct avec l'objet à détecter et les capteurs de proximité. Chaque catégorie peut être
subdivisée en trois catégories de capteurs : les capteurs mécaniques, électriques, pneumatiques . [6]
1- Principales caractéristiques des capteursa) L'étendue de la mesure : c'est la différence entre le plus petit signal détecté et le plus grand
perceptible sans risque de destruction pour le capteur.b) La sensibilité : c'est la plus petite variation d'une grandeur physique que peut détecter un capteur.
c) La rapidité : c'est le temps de réaction d'un capteur entre la variation de la grandeur physique qu'il
mesure et l'instant où l'information prise en compte par la partie commande.
d) La précision : c'est la capabilité de répétabilité d'une information position, d'une vitesse,... [6]Publié par hicham à 16:06 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
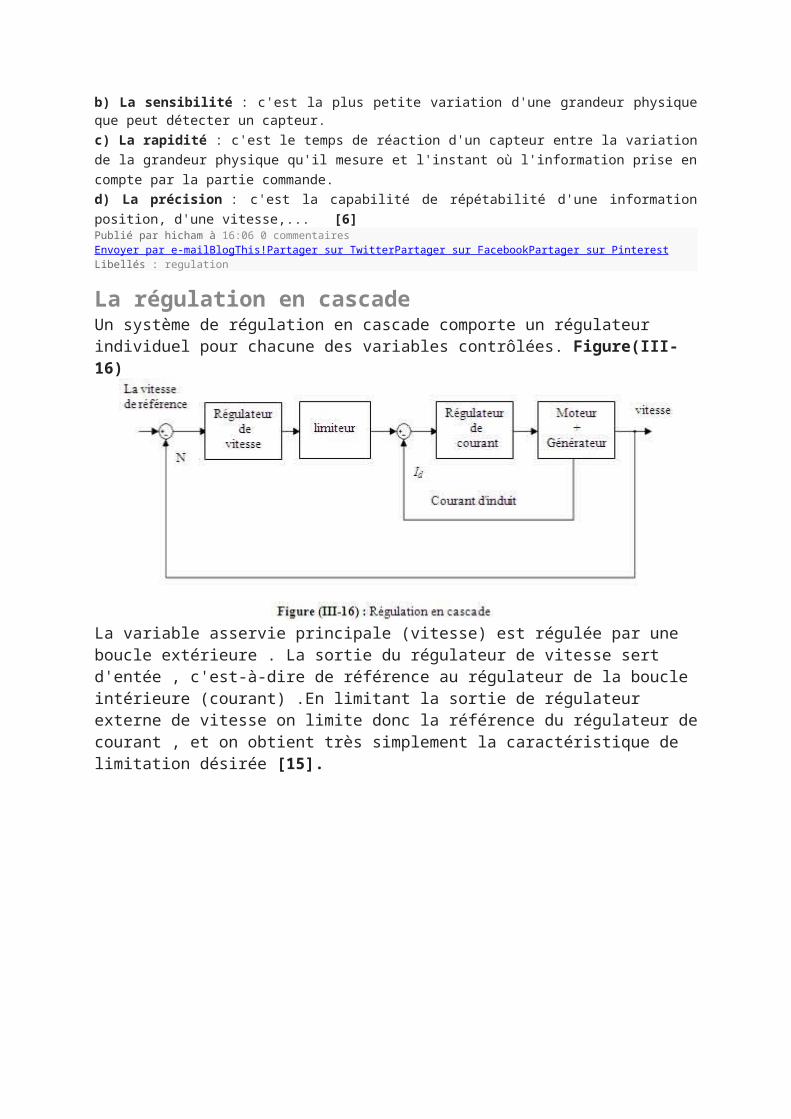
La régulation en cascadeUn système de régulation en cascade comporte un régulateur individuel pour chacune des variables contrôlées. Figure(III-16)
La variable asservie principale (vitesse) est régulée par une boucle extérieure . La sortie du régulateur de vitesse sert d'entée , c'est-à-dire de référence au régulateur de la boucle intérieure (courant) .En limitant la sortie de régulateur externe de vitesse on limite donc la référence du régulateur de courant , et on obtient très simplement la caractéristique de limitation désirée [15].
Le circuit de réglage du courant d'induit est composé du dispositif de commande de gâchettes 3, du régulateur 4 et de la mesure du courant d'induit 5. Le circuit de réglage de vitesse contient le régulateur 6, la mesure de vitesse à l'aide d'une dynamo tachymétrique 7 ,ainsi que l'organe de consigne 8 (potentiomètre, par exemple)[15]. Pour assurer l'excitation on utilise un pont à diodes 9, ce dernier maintient le courant d'excitation constant. Publié par hicham à 16:05 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
REGULATION1- Définition
Pour effectuer un certain travail avec des performances données, le système doit être asservi. Le premier rôle de régulateur d’un système de régulation est d'obliger la ou les grandeurs asservies (sortie de système) à conserver des valeurs aussi proches que possible de celles que l’on considère
comme idéales. Ces valeurs idéales ou, théoriques, sont à leur tour des fonctions des grandeurs d’entrées du système (référence) et de perturbations. [15]
Généralement les systèmes de commande sont à boucle fermée qui consiste en une
commande à rétro-action puisque c'est le moyen le plus commode de réaliser les relations désirées
entre l'entrée et la sortie des systèmes, ce qui permet une compensation interne des imprécisions et
les dérivées des caractéristiques du système.
2- Fonction d'un régulateurPlus d'infos »Publié par hicham à 15:56 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
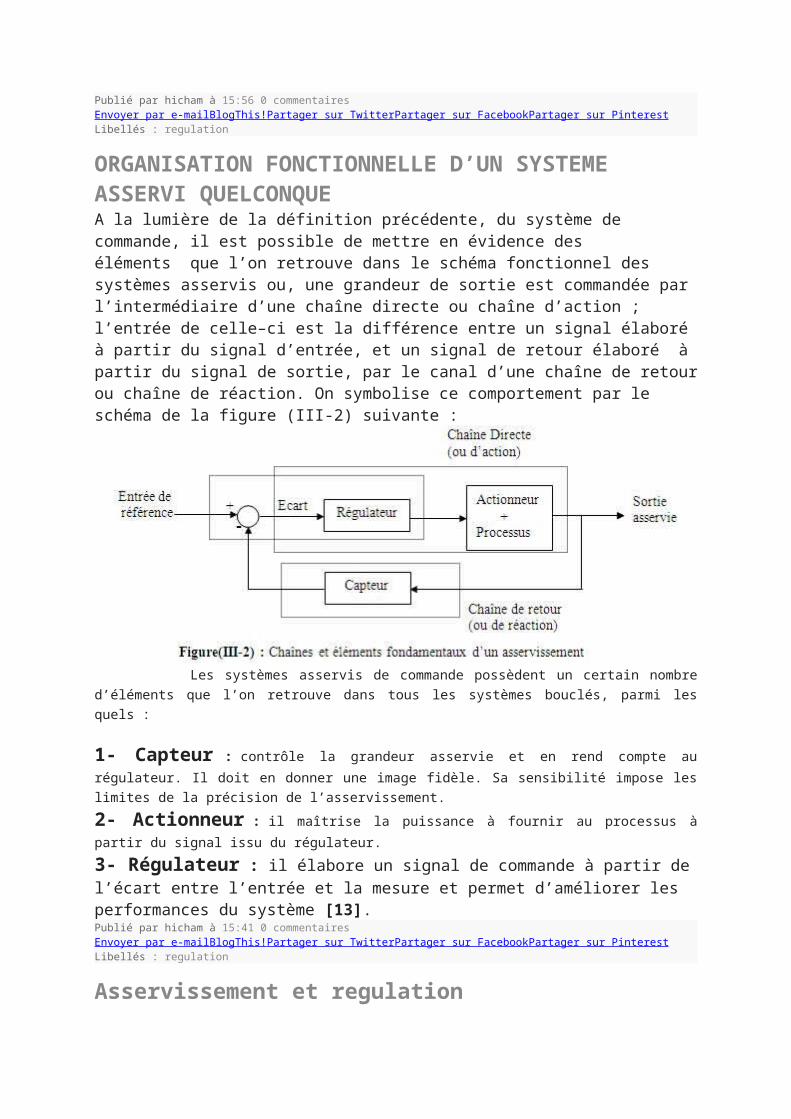
ORGANISATION FONCTIONNELLE D’UN SYSTEME ASSERVI QUELCONQUEA la lumière de la définition précédente, du système de commande, il est possible de mettre en évidence des éléments que l’on retrouve dans le schéma fonctionnel des systèmes asservis ou, une grandeur de sortie est commandée par l’intermédiaire d’une chaîne directe ou chaîne d’action ; l’entrée de celle–ci est la différence entre un signal élaboré à partir du signal d’entrée, et un signal de retour élaboré à partir du signal de sortie, par le canal d’une chaîne de retour ou chaîne de réaction. On symbolise ce comportement par le schéma de la figure (III-2) suivante :
Les systèmes asservis de commande possèdent un certain nombre d’éléments que l’on
retrouve dans tous les systèmes bouclés, parmi les quels :
1- Capteur : contrôle la grandeur asservie et en rend compte au régulateur. Il doit en donner une
image fidèle. Sa sensibilité impose les limites de la précision de l’asservissement.
2- Actionneur : il maîtrise la puissance à fournir au processus à partir du signal issu du
régulateur.
3- Régulateur : il élabore un signal de commande à partir de l’écart entre l’entrée et la mesure et permet d’améliorer les performances du système [13].Publié par hicham à 15:41 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
Asservissement et regulationLes asservissements linéaires ou systèmes bouclés occupent une place importante dans le
monde moderne, en raison des performances de plus en plus élevées que l’on réclame des commandes automatiques. [11]

Le projet d'un asservissement et la régulation est une opération très compliquée en raison des nombreux paramètres qui entrent en jeu. Nous allons introduire brièvement dans ce chapitre les généralités qui traitent l’étude d’un système asservi linéaire continu.
GENERALITES
1- Les systèmes de commande Dans le langage moderne, le sens du mot système est devenu ambigu. Par conséquent,
commençons par le définir : d'abord abstraitement, ensuite d'une manière un peu plus spécifique par
rapport à la littérature scientifique.
* Un système est un assemblage : un ensemble ou une collection d'objets reliés ou branchés
les uns aux autres de façon à former une entité ou un tout.
* Un système est un assemblage de constituants branchés ou relies de telle façon qu'ils
forment une entité individualisée et/ou agissent comme telle.
Le mot asservir est en général pris dans le sens de régler, diriger ou commander. En combinant les
définitions précédentes, nous obtenons : Un système de commande est un assemblage des constituants physiques branchés ou reliés les uns aux autres de telle sorte qu'il puisse se commander, se diriger ou se régler lui-même, ou bien commander, diriger ou régler un autre système [12].
2- Systèmes linéaires continus.
Un système physique est linéaire si la relation entre les grandeurs d’entrée et la ou les
grandeurs de sortie est un système d’équations différentielles à coefficients constants.
Ce système est dit continu si toutes les grandeurs qui le caractérisent sont de nature
continue, l’information qui représente ces grandeurs est disponible à chaque instant et peut prendre
toutes les valeurs possibles entre deux limites.Tout système physique obéit à son entrée à la commande x pour modifier sa sortie y. Cette dernière dépend par ailleurs de l’environnement du processus et des possibles variations de ses paramètres internes, ce qui rend l’étude difficile du lien de cause-effet entre l’entrée
x et la sortie y. Le processus physique sera donc toujours représenté par son modèle, qui est la loi choisie pour prédire au mieux son comportement, leur étude est effectuée selon deux aspects utiles, à savoir l’aspect statique qui Concerne l’étude des systèmes asservis en mode régulation (entrée fixe), et l’aspect dynamique qui s’étudie par les notions de précision dynamique, de rapidité et de stabilité. [13]
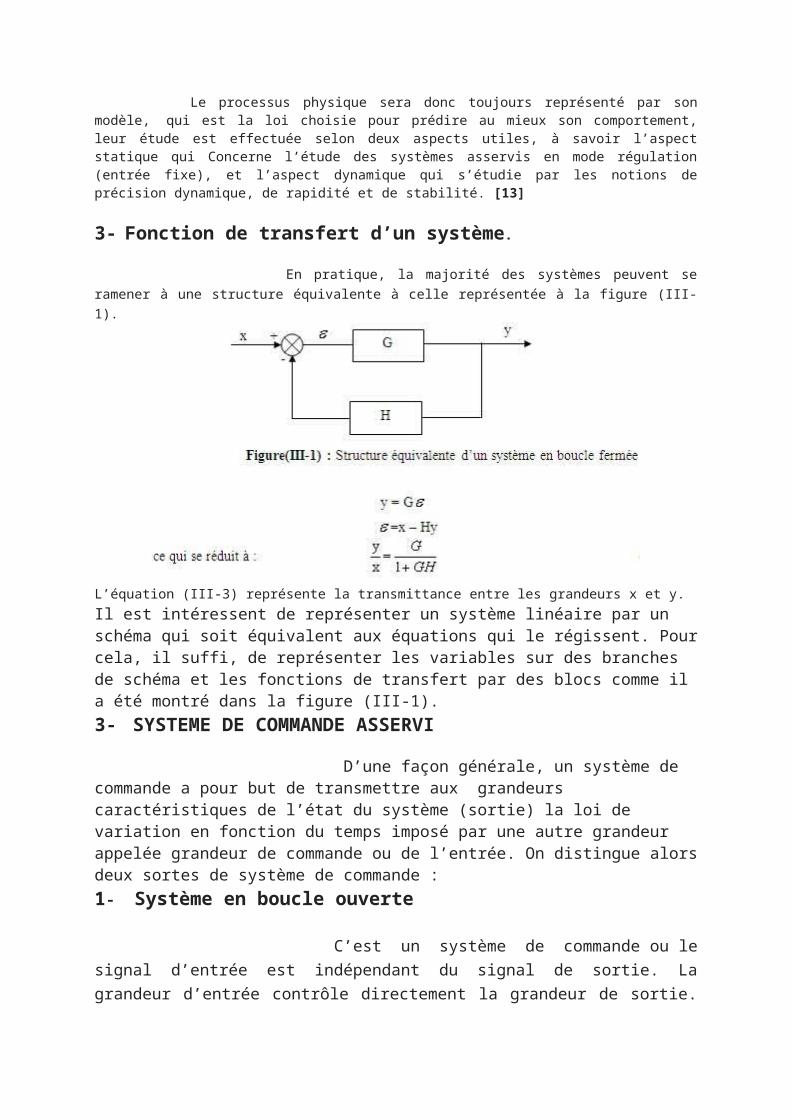
3- Fonction de transfert d’un système.
En pratique, la majorité des systèmes peuvent se ramener à une structure équivalente
à celle représentée à la figure (III-1).
L’équation (III-3) représente la transmittance entre les grandeurs x et y.Il est intéressent de représenter un système linéaire par un schéma qui soit équivalent aux équations qui le régissent. Pour cela, il suffi, de représenter les variables sur des branches de schéma et les fonctions de transfert par des blocs comme il a été montré dans la figure (III-1).3- SYSTEME DE COMMANDE ASSERVI
D’une façon générale, un système de commande a pour but de transmettre aux grandeurs caractéristiques de l’état du système (sortie) la loi de variation en fonction du temps imposé par une autre grandeur appelée grandeur de commande ou de l’entrée. On distingue alors deux sortes de système de commande :1- Système en boucle ouverte
C’est un système de commande ou le signal d’entrée est indépendant du
signal de sortie. La grandeur d’entrée contrôle directement la grandeur de sortie. Ce système a
l’avantage d’être simple, il est très stable. En revanche, ses performances sont médiocres, car
il n’existe pas de circuit de retour permettant de comparer la grandeur de sortie à la grandeur
de référence.
2- Système en boucle fermée Une correction continue est déterminée par une mesure continue ; ceci est le résultat d'une structure en boucle fermée. Par conséquent, la grandeur de sortie est comparée à chaque instant à la grandeur d'entrée la différence joue le rôle d'un signal de correction ces systèmes possèdent l'avantage d'être plus précis et limitent l'influence des perturbations. En général, on considère qu'un système de commande en boucle fermée est un système où le signal de commande dépend d'une façon ou d'une autre du signal de sortie [14].Publié par hicham à 15:39 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulationmardi 22 mars 2011
Regulateurs PI PD PIDLe régulateur proportionne l’intégral PI :
La combinaison de l'action I et l'action P permet d'offrir la possibilité de modifier en même temps le
régime transitoire et le régime permanent. L'emploi de ce régulateur se traduitpar l'ajout d'un pôle à l'origine
et un zéro à la fonction de transfert en boucle ouverte dusystème.
Il est caractérisé dans le domaine temporel par l'équation :

Et pour sa fonction de transfert elle est de la forme :
Et dans le cas discret il est caractérisé par l’équation :
Le régulateur proportionne l’dérive PD:
Dans le régime permanent plus la valeur de est grande plus l'erreur est petite, par contre le régime
transitoire dépend de l'action D
II est caractérisé dans le domaine temporel par l'équation :
Et pour sa fonction de transfert elle est de la forme :
Et dans le cas discret il est caractérisé par l’équation:
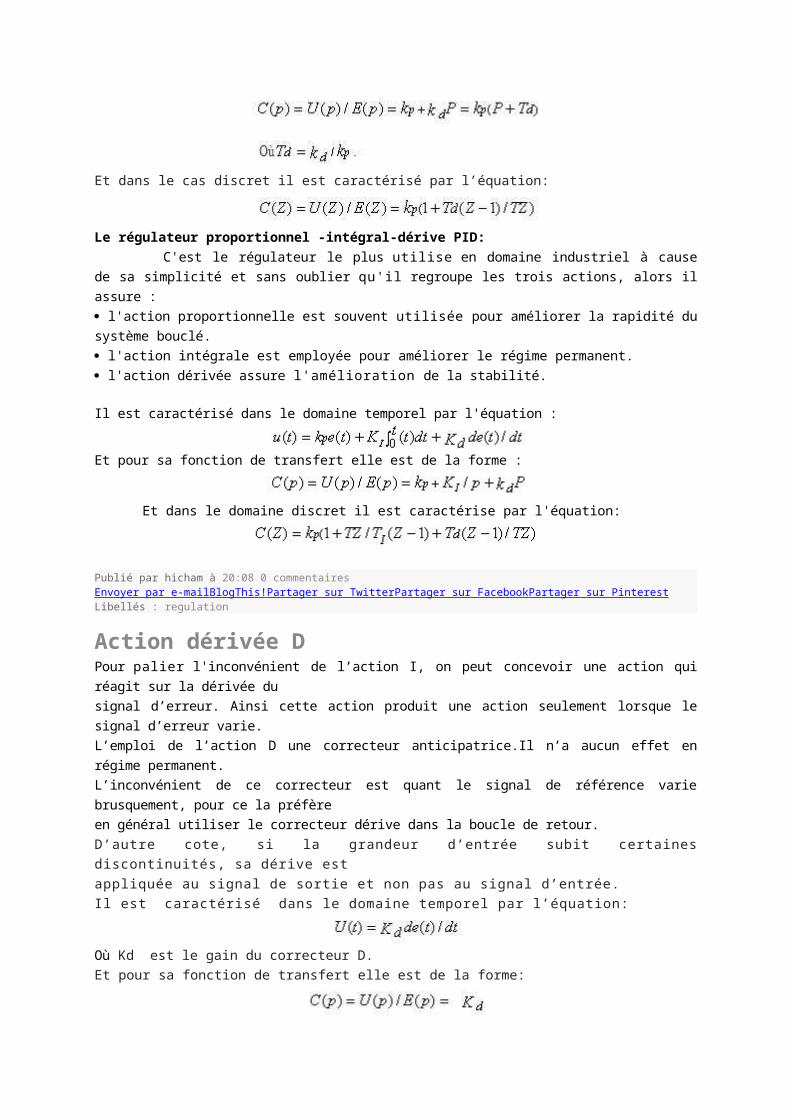
Le régulateur proportionnel -intégral-dérive PID:
C'est le régulateur le plus utilise en domaine industriel à cause de sa simplicité et sans
oublier qu'il regroupe les trois actions, alors il assure :
l'action proportionnelle est souvent utilisée pour améliorer la rapidité du système bouclé.
l'action intégrale est employée pour améliorer le régime permanent.
l'action dérivée assure l'amélioration de la stabilité.
Il est caractérisé dans le domaine temporel par l'équation :
Et pour sa fonction de transfert elle est de la forme :
Et dans le domaine discret il est caractérise par l'équation:
Publié par hicham à 20:08 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
Action dérivée DPour palier l'inconvénient de l’action I, on peut concevoir une action qui réagit sur la dérivée du
signal d’erreur. Ainsi cette action produit une action seulement lorsque le signal d’erreur varie.
L’emploi de l’action D une correcteur anticipatrice.Il n’a aucun effet en régime permanent.
L’inconvénient de ce correcteur est quant le signal de référence varie brusquement, pour ce la préfère
en général utiliser le correcteur dérive dans la boucle de retour.
D’autre cote, si la grandeur d’entrée subit certaines discontinuités, sa dérive est
appliquée au signal de sortie et non pas au signal d’entrée.
Il est caractérisé dans le domaine temporel par l’équation:
Où Kd est le gain du correcteur D.
Et pour sa fonction de transfert elle est de la forme:
Et dans le cas continue il est caractérise par:
Publié par hicham à 20:00 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
Action intégrale IPour palier l'inconvénient mentionne dans le correcteur P on utilise une action intégrale I quipermet d'augmenter le type de système. L'inconvénient majeur du correcteur se traduit par l'ajoutd'un
pôle à l'origine du plan P ce qui cause un effet de dégradation de stabilitédans le régime transitoire, cela
en produisant toujours un signal de commande même si le signal à atteint le régime permanent. Il est
caractérisé dans le domaine temporel par l'équation:
Où Kf est le gain du correcteur.Et pour sa fonction de transfert elle est de la forme:
Et dans le cas discret l'action intégrale est caractérisée par l'équation:
Publié par hicham à 19:57 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulationdimanche 20 mars 2011
Action proportionnelle P L'action P est la plus simple, car elle agit directement sur l'erreur à l'instant courant pour générer
l'action requise pour corriger la commande à commander. Ainsi, la réponse du correcteur P est
instantanée.
L'avantage principal de ce correcteur est sa simplicité d'implémentation à l'aide d'amplificateurs
opérationnels, par contre son inconvénient est qu'il n'offre aucune possibilité d'annuler l'erreur du
système en régime permanent. Dans le cas où la fonction de transfert du système est de type zéro et
que le signal de référence et de type échelon par exemple,
II est caractérise dans le domaine temporel par l'équation :
Où kp est le gain du correcteur.
Et pour sa fonction de transfert elle est de la forme:

Et dans le cas discret l'action proportionnelle est identique c'est-à-dire:
Où Z est la transformée en Z.
Publié par hicham à 22:30 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
Les régulateurs classiquesLe rôle des correcteurs est de générer des signaux pour commander ou contrôler lessystèmes autour
d'un point fonctionnement. Virtuellement tous les correcteurs, déterminentleurs signaux de sortie à partir
de l'erreur entre le point de fonctionnement et la sortie dusystème.
Généralement en utilisent les régulateurs classiques qui comprennent trois actions:
Action proportionnelle (P)
Action intégral (I).
Action dérive (D).
Et on peut combiner ces trois actions pour avoir d'autres formes de correcteur PI, PD, PID.Publié par hicham à 22:28 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
Commande en boucle fermée1 Structure de base :
La structure de commande en boucle fermée peut prendre plusieurs configurations. Laconfiguration
la plus utilisée, quand le modèle employé est sous forme de fonction detransfert, est celle de la
figure II.1.a., souvent appelée la configuration cascade. Par contre, quand le modèle est donné sous
forme de modèle d'état, la structure utilisée est celle de la figure II.1.b. Cette configuration est celle de la
commande par retour d'état.
2 Performances des systèmes en boucle fermée:Plus d'infos »Publié par hicham à 22:26 0 commentaires Envoyer par e-mail BlogThis! Partager sur Twitter Partager sur Facebook Partager sur Pinterest Libellés : regulation
Iterative Feedback TuningI.Introduction: L'I.F.T est une méthode d'optimisation des contrôleurs basée sur la minimisationd'un critère de
type quadratique, dans lequel apparaît explicitement l'erreur entre la sortie de la boucle fermée
obtenue expérimentalement et la réponse désirée. Un second terme peut pénaliser l'effort de
commande. Pour un contrôleur de structure donnée, la minimisation du critère se fera itérativement
par une méthode de descente de type gradient ou Newton avec un pas fixe ou variable. Lorsqu'il est
variable, il permet de contrôler le taux de changement entre le nouveau contrôleur et l 'ancien, C’est
un important aspect pour une perspective d'ingénierie. En plus, un pas variable est la clé pour
l'établissement de la convergence de l'algorithme en présence des perturbations.
Pour ce qui concerne les expériences à effectuer deux cas peuvent se présenter :
1. Pour un contrôleur de deux degrés de liberté, trois expériences successives sont réalisées à
chaque itération de l'algorithme. La première et la troisième consistent simplement à collecter les
données sous les conditions normales de fonctionnement, la seule expérience spéciale est la
deuxième qui nécessite la réinjection de la sortie de la première expérience, qui constituera avec
l'entrée de référence précédente, la nouvelle entrée de référence pour cette expérience.
2. Pour un contrôleur à un degré de liberté, seules la première et la deuxième expérience sont
nécessaires.
II. Eléments de base sur la commande: Dans la pratique la commande qui assure les meilleures performances est celle en boucle fermée,
elle possède plusieurs effets bénéfiques tels que la réduction de la sensibilitédu système à la variation
des paramètres, l'amélioration des rejets des perturbations et dessignaux de bruits agissant sur le
système à commander et l'amélioration du régime permanent et du régime transitoire du système
considère.


![choix Fin [kI][do][mi][po][pI] [sI][tJ][so][vI][pi]](https://static.fdocuments.fr/doc/165x107/551d9dc6497959293b8e2d3f/choix-fin-kidomipopi-sitjsovipi.jpg)
















