Étude d’amortisseurs non-linéaires appliqués aux roues ... · Turboréacteur civil :...
82
Soutenance de thèse en vue de l’obtention du titre de Docteur de l’École Centrale de Lyon Spécialité mécanique Étude d’amortisseurs non-linéaires appliqués aux roues aubagées et aux systèmes multi-étages Denis Laxalde Jury d’examen : A. Berlioz, Professeur, Université Paul Sabatier, Toulouse J.-C. Golinval, Professeur, Université de Liège J.-P. Lombard, Adjoint méthodes en mécanique, Snecma C. Pierre, Professeur, Université McGill de Montréal C. Gibert, Ingénieur de Recherche, École Centrale de Lyon F. Thouverez, Professeur, École Centrale de Lyon Rapporteur Rapporteur Examinateur Examinateur Examinateur Directeur de thèse
Transcript of Étude d’amortisseurs non-linéaires appliqués aux roues ... · Turboréacteur civil :...

Soutenance de thèseen vue de l’obtention du titre de
Docteur de l’École Centrale de LyonSpécialité mécanique
Étude d’amortisseurs non-linéaires appliqués auxroues aubagées et aux systèmes multi-étages
Denis Laxalde
Jury d’examen :
A. Berlioz, Professeur, Université Paul Sabatier, ToulouseJ.-C. Golinval, Professeur, Université de LiègeJ.-P. Lombard, Adjoint méthodes en mécanique, SnecmaC. Pierre, Professeur, Université McGill de MontréalC. Gibert, Ingénieur de Recherche, École Centrale de LyonF. Thouverez, Professeur, École Centrale de Lyon
RapporteurRapporteurExaminateurExaminateurExaminateurDirecteur de thèse
Sommaire
Introduction
Dynamique des roues aubagées
Analyse non-linéaire fréquentielle
Étude d’amortisseurs non-linéaires
Conclusions et perspectives
Introduction
Sommaire
Introduction
Dynamique des roues aubagées
Analyse non-linéaire fréquentielle
Étude d’amortisseurs non-linéaires
Conclusions et perspectives
Introduction
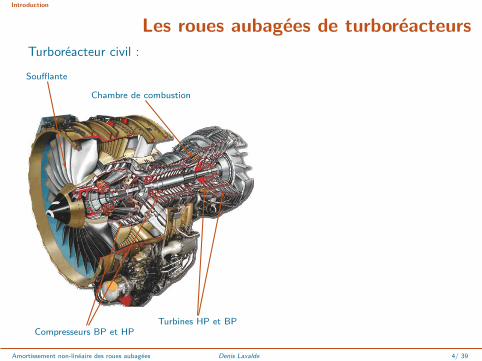
Les roues aubagées de turboréacteursTurboréacteur civil :
Soufflante
Chambre de combustion
Compresseurs BP et HPTurbines HP et BP
Amortissement non-linéaire des roues aubagées Denis Laxalde 4/ 39
Introduction
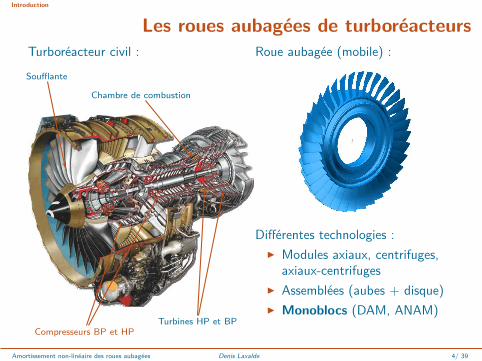
Les roues aubagées de turboréacteursTurboréacteur civil :
Soufflante
Chambre de combustion
Compresseurs BP et HPTurbines HP et BP
Roue aubagée (mobile) :
Différentes technologies :◮ Modules axiaux, centrifuges,
axiaux-centrifuges◮ Assemblées (aubes + disque)◮ Monoblocs (DAM, ANAM)
Amortissement non-linéaire des roues aubagées Denis Laxalde 4/ 39
Introduction
Contexte et cadre des recherches
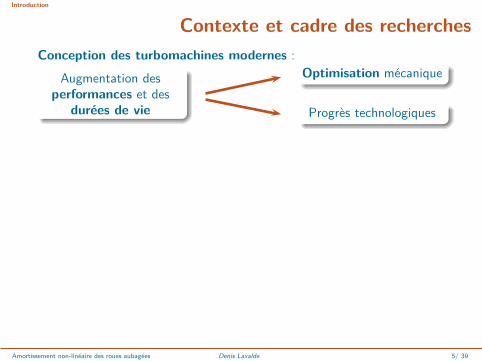
Conception des turbomachines modernes :
Augmentation desperformances et des
durées de vie
Optimisation mécanique
Progrès technologiques
Amortissement non-linéaire des roues aubagées Denis Laxalde 5/ 39

Introduction
Contexte et cadre des recherches
Conception des turbomachines modernes :
Augmentation desperformances et des
durées de vie
Optimisation mécanique
Progrès technologiques
Enjeux pour les constructeurs :◮ maîtrise des niveaux vibratoires◮ amélioration de la prédictivité des méthodes de simulation
Amortissement non-linéaire des roues aubagées Denis Laxalde 5/ 39

Introduction
Contexte et cadre des recherches
Conception des turbomachines modernes :
Augmentation desperformances et des
durées de vie
Optimisation mécanique
Progrès technologiques
Enjeux pour les constructeurs :◮ maîtrise des niveaux vibratoires◮ amélioration de la prédictivité des méthodes de simulation
Thématiques de recherche :1 Étude d’amortisseurs non-linéaires :
Technologies : Dispositifs frottants, absorbeurs de vibrationsMéthodologies : Modélisation, analyse non-linéaire, études
numériques et expérimentales
Amortissement non-linéaire des roues aubagées Denis Laxalde 5/ 39

Introduction
Contexte et cadre des recherches
Conception des turbomachines modernes :
Augmentation desperformances et des
durées de vie
Optimisation mécanique
Progrès technologiques
Enjeux pour les constructeurs :◮ maîtrise des niveaux vibratoires◮ amélioration de la prédictivité des méthodes de simulation
Thématiques de recherche :1 Étude d’amortisseurs non-linéaires :
Technologies : Dispositifs frottants, absorbeurs de vibrationsMéthodologies : Modélisation, analyse non-linéaire, études
numériques et expérimentales2 Modélisation et analyse dynamique des ensembles multi-étages de
roues aubagées
Amortissement non-linéaire des roues aubagées Denis Laxalde 5/ 39

Dynamique des roues aubagées
Sommaire
Introduction
Dynamique des roues aubagéesConception et modélisation des roues aubagéesAnalyse dynamique multi-étage
Analyse non-linéaire fréquentielle
Étude d’amortisseurs non-linéaires
Conclusions et perspectives
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
Sources d’excitation
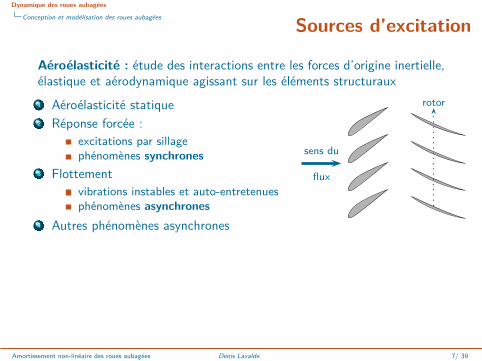
Aéroélasticité : étude des interactions entre les forces d’origine inertielle,élastique et aérodynamique agissant sur les éléments structuraux
1 Aéroélasticité statique2 Réponse forcée :
excitations par sillagephénomènes synchrones
3 Flottementvibrations instables et auto-entretenuesphénomènes asynchrones
4 Autres phénomènes asynchrones
sens du
flux
rotor
Amortissement non-linéaire des roues aubagées Denis Laxalde 7/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
Sources d’excitation
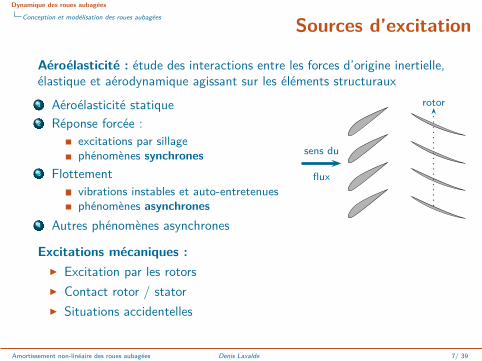
Aéroélasticité : étude des interactions entre les forces d’origine inertielle,élastique et aérodynamique agissant sur les éléments structuraux
1 Aéroélasticité statique2 Réponse forcée :
excitations par sillagephénomènes synchrones
3 Flottementvibrations instables et auto-entretenuesphénomènes asynchrones
4 Autres phénomènes asynchrones
sens du
flux
rotor
Excitations mécaniques :◮ Excitation par les rotors◮ Contact rotor / stator◮ Situations accidentelles
Amortissement non-linéaire des roues aubagées Denis Laxalde 7/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
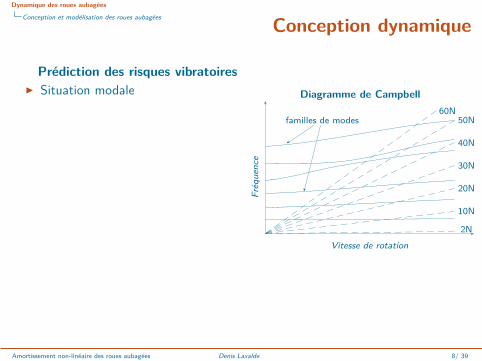
Conception dynamique
Prédiction des risques vibratoires◮ Situation modale Diagramme de Campbell
Vitesse de rotationF
réquen
ce
2N
10N
20N
30N
40N
50N60N
familles de modes
Amortissement non-linéaire des roues aubagées Denis Laxalde 8/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
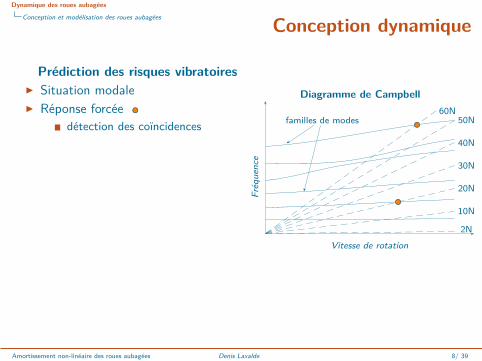
Conception dynamique
Prédiction des risques vibratoires◮ Situation modale◮ Réponse forcée bC
détection des coïncidences
Diagramme de Campbell
Vitesse de rotationF
réquen
ce
2N
10N
20N
30N
40N
50N60N
familles de modes
bC
bC
Amortissement non-linéaire des roues aubagées Denis Laxalde 8/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
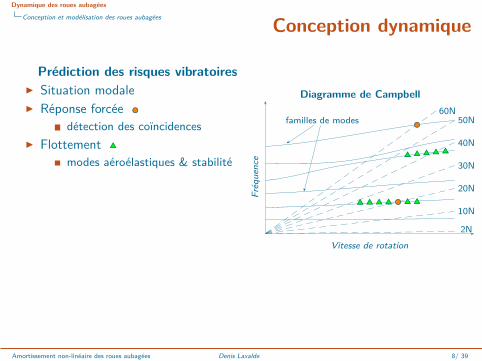
Conception dynamique
Prédiction des risques vibratoires◮ Situation modale◮ Réponse forcée bC
détection des coïncidences
◮ Flottement uT
modes aéroélastiques & stabilité
Diagramme de Campbell
Vitesse de rotationF
réquen
ce
2N
10N
20N
30N
40N
50N60N
familles de modes
bC
bC
uT uT uT uT uT uT
uT uT uT uT uT
Amortissement non-linéaire des roues aubagées Denis Laxalde 8/ 39

Dynamique des roues aubagées
Conception et modélisation des roues aubagées
Conception dynamique
Prédiction des risques vibratoires◮ Situation modale◮ Réponse forcée bC
détection des coïncidences
◮ Flottement uT
modes aéroélastiques & stabilité
◮ Effets du désaccordage
Diagramme de Campbell
Vitesse de rotationF
réquen
ce
2N
10N
20N
30N
40N
50N60N
familles de modes
bC
bC
uT uT uT uT uT uT
uT uT uT uT uT
Amortissement non-linéaire des roues aubagées Denis Laxalde 8/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
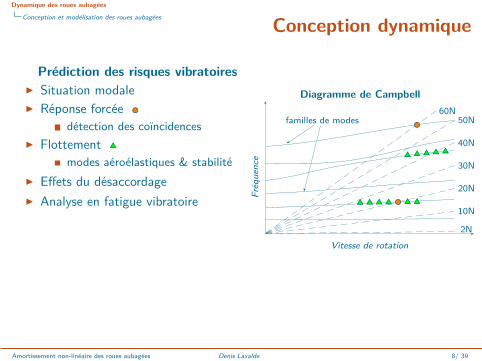
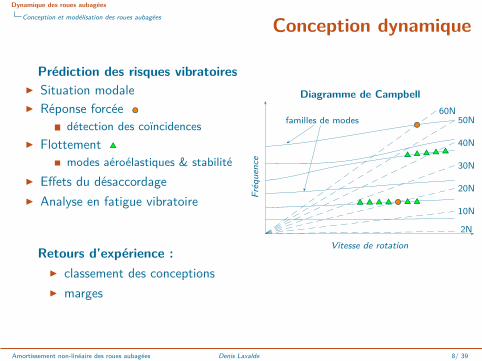
Conception dynamique
Prédiction des risques vibratoires◮ Situation modale◮ Réponse forcée bC
détection des coïncidences
◮ Flottement uT
modes aéroélastiques & stabilité
◮ Effets du désaccordage◮ Analyse en fatigue vibratoire
Diagramme de Campbell
Vitesse de rotationF
réquen
ce
2N
10N
20N
30N
40N
50N60N
familles de modes
bC
bC
uT uT uT uT uT uT
uT uT uT uT uT
Amortissement non-linéaire des roues aubagées Denis Laxalde 8/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
Conception dynamique
Prédiction des risques vibratoires◮ Situation modale◮ Réponse forcée bC
détection des coïncidences
◮ Flottement uT
modes aéroélastiques & stabilité
◮ Effets du désaccordage◮ Analyse en fatigue vibratoire
Diagramme de Campbell
Vitesse de rotationF
réquen
ce
2N
10N
20N
30N
40N
50N60N
familles de modes
bC
bC
uT uT uT uT uT uT
uT uT uT uT uT
Retours d’expérience :◮ classement des conceptions◮ marges
Amortissement non-linéaire des roues aubagées Denis Laxalde 8/ 39

Dynamique des roues aubagées
Conception et modélisation des roues aubagées
Symétrie cyclique
Roue aubagée accordée :
Amortissement non-linéaire des roues aubagées Denis Laxalde 9/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
Symétrie cyclique
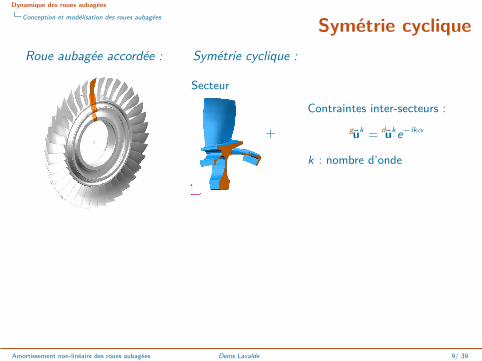
Roue aubagée accordée : Symétrie cyclique :
Secteur
+
Contraintes inter-secteurs :
guk=
duke−ikα
k : nombre d’onde
Amortissement non-linéaire des roues aubagées Denis Laxalde 9/ 39
Dynamique des roues aubagées
Conception et modélisation des roues aubagées
Symétrie cyclique
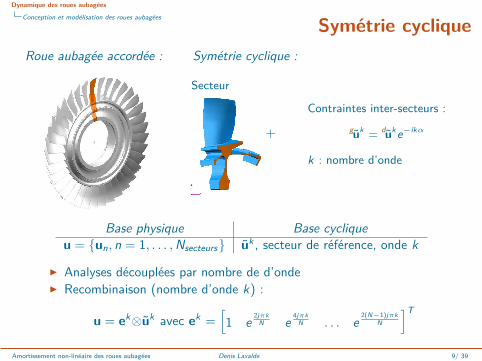
Roue aubagée accordée : Symétrie cyclique :
Secteur
+
Contraintes inter-secteurs :
guk=
duke−ikα
k : nombre d’onde
Base physique Base cyclique
u = {un, n = 1, . . . ,Nsecteurs} uk , secteur de référence, onde k
◮ Analyses découplées par nombre de d’onde◮ Recombinaison (nombre d’onde k) :
u = ek⊗uk avec ek =[
1 e2jπk
N e4jπk
N . . . e2(N−1)jπk
N
]T
Amortissement non-linéaire des roues aubagées Denis Laxalde 9/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
Analyse dynamique multi-étage
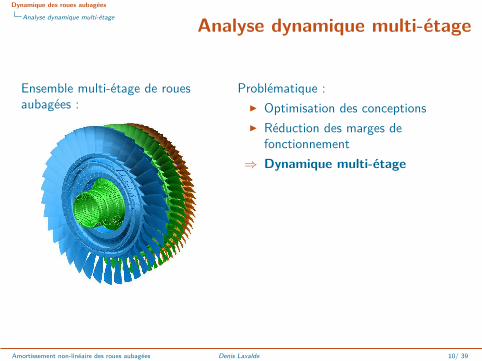
Ensemble multi-étage de rouesaubagées :
Problématique :◮ Optimisation des conceptions◮ Réduction des marges de
fonctionnement
⇒ Dynamique multi-étage
Amortissement non-linéaire des roues aubagées Denis Laxalde 10/ 39

Dynamique des roues aubagées
Analyse dynamique multi-étage
Analyse dynamique multi-étage
Ensemble multi-étage de rouesaubagées :
Problématique :◮ Optimisation des conceptions◮ Réduction des marges de
fonctionnement
⇒ Dynamique multi-étage
État de l’art :◮ Calcul complet (360 )◮ Modèles dégradés (2D, Fourier,. . . )◮ Sous-structuration multi-niveau◮ Symétrie cyclique multi-étage
Amortissement non-linéaire des roues aubagées Denis Laxalde 10/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
Symétrie cyclique multi-étage
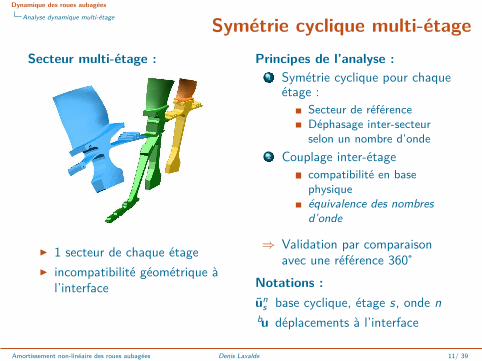
Secteur multi-étage :
◮ 1 secteur de chaque étage◮ incompatibilité géométrique à
l’interface
Principes de l’analyse :1 Symétrie cyclique pour chaque
étage :Secteur de référenceDéphasage inter-secteurselon un nombre d’onde
2 Couplage inter-étagecompatibilité en basephysiqueéquivalence des nombres
d’onde
⇒ Validation par comparaisonavec une référence 360
Notations :
uns base cyclique, étage s, onde n
bu déplacements à l’interface
Amortissement non-linéaire des roues aubagées Denis Laxalde 11/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
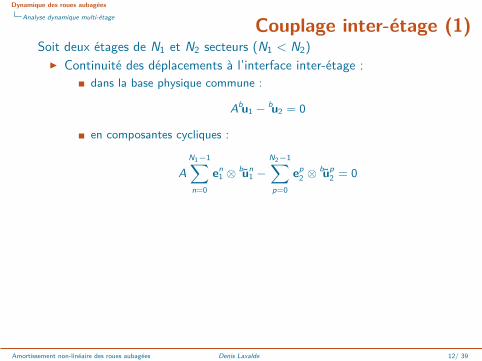
Couplage inter-étage (1)Soit deux étages de N1 et N2 secteurs (N1 < N2)
◮ Continuité des déplacements à l’interface inter-étage :dans la base physique commune :
Abu1 −
bu2 = 0
en composantes cycliques :
A
N1−1∑
n=0
en1 ⊗
bun1 −
N2−1∑
p=0
ep2 ⊗
bup2 = 0
Amortissement non-linéaire des roues aubagées Denis Laxalde 12/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
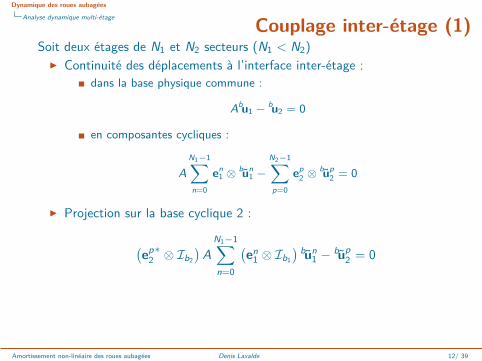
Couplage inter-étage (1)Soit deux étages de N1 et N2 secteurs (N1 < N2)
◮ Continuité des déplacements à l’interface inter-étage :dans la base physique commune :
Abu1 −
bu2 = 0
en composantes cycliques :
A
N1−1∑
n=0
en1 ⊗
bun1 −
N2−1∑
p=0
ep2 ⊗
bup2 = 0
◮ Projection sur la base cyclique 2 :
(ep
2∗ ⊗ Ib2
)A
N1−1∑
n=0
(en
1 ⊗ Ib1
)bun
1 − bup2 = 0
Amortissement non-linéaire des roues aubagées Denis Laxalde 12/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
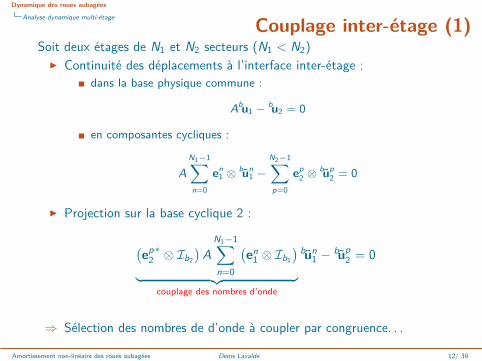
Couplage inter-étage (1)Soit deux étages de N1 et N2 secteurs (N1 < N2)
◮ Continuité des déplacements à l’interface inter-étage :dans la base physique commune :
Abu1 −
bu2 = 0
en composantes cycliques :
A
N1−1∑
n=0
en1 ⊗
bun1 −
N2−1∑
p=0
ep2 ⊗
bup2 = 0
◮ Projection sur la base cyclique 2 :
(ep
2∗ ⊗ Ib2
)A
N1−1∑
n=0
(en
1 ⊗ Ib1
)
︸ ︷︷ ︸
couplage des nombres d’onde
bun1 − bup
2 = 0
⇒ Sélection des nombres de d’onde à coupler par congruence. . .
Amortissement non-linéaire des roues aubagées Denis Laxalde 12/ 39

Dynamique des roues aubagées
Analyse dynamique multi-étage
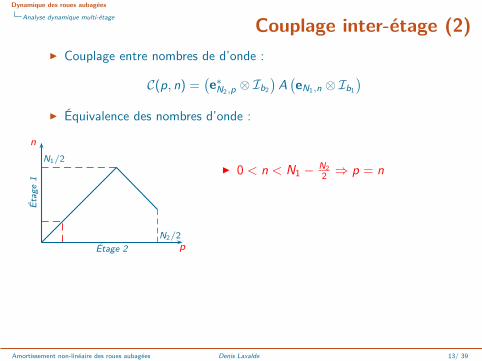
Couplage inter-étage (2)◮ Couplage entre nombres de d’onde :
C(p, n) =(e∗N2,p
⊗ Ib2
)A(eN1,n ⊗ Ib1
)
◮ Équivalence des nombres d’onde :
N1/2
N2/2p
n
Étage 2
Éta
ge1
Amortissement non-linéaire des roues aubagées Denis Laxalde 13/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
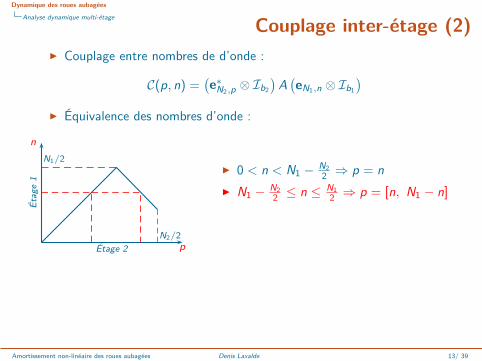
Couplage inter-étage (2)◮ Couplage entre nombres de d’onde :
C(p, n) =(e∗N2,p
⊗ Ib2
)A(eN1,n ⊗ Ib1
)
◮ Équivalence des nombres d’onde :
N1/2
N2/2p
n
Étage 2
Éta
ge1
◮ 0 < n < N1 − N22 ⇒ p = n
Amortissement non-linéaire des roues aubagées Denis Laxalde 13/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
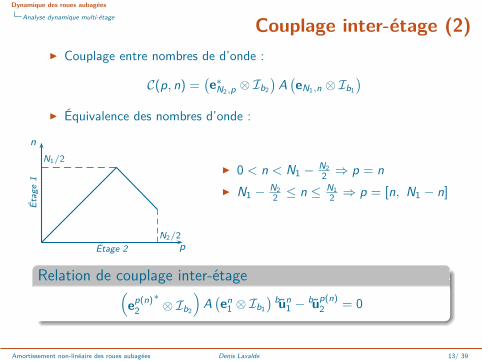
Couplage inter-étage (2)◮ Couplage entre nombres de d’onde :
C(p, n) =(e∗N2,p
⊗ Ib2
)A(eN1,n ⊗ Ib1
)
◮ Équivalence des nombres d’onde :
N1/2
N2/2p
n
Étage 2
Éta
ge1
◮ 0 < n < N1 − N22 ⇒ p = n
◮ N1 − N22 ≤ n ≤ N1
2 ⇒ p = [n, N1 − n]
Amortissement non-linéaire des roues aubagées Denis Laxalde 13/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
Couplage inter-étage (2)◮ Couplage entre nombres de d’onde :
C(p, n) =(e∗N2,p
⊗ Ib2
)A(eN1,n ⊗ Ib1
)
◮ Équivalence des nombres d’onde :
N1/2
N2/2p
n
Étage 2
Éta
ge1
◮ 0 < n < N1 − N22 ⇒ p = n
◮ N1 − N22 ≤ n ≤ N1
2 ⇒ p = [n, N1 − n]
Relation de couplage inter-étage(
ep(n)2
∗
⊗ Ib2
)
A(en
1 ⊗ Ib1
)bun
1 − bup(n)2 = 0
Amortissement non-linéaire des roues aubagées Denis Laxalde 13/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
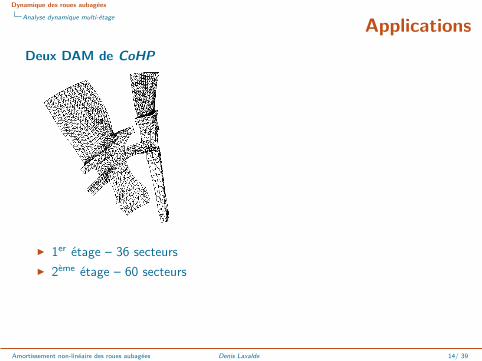
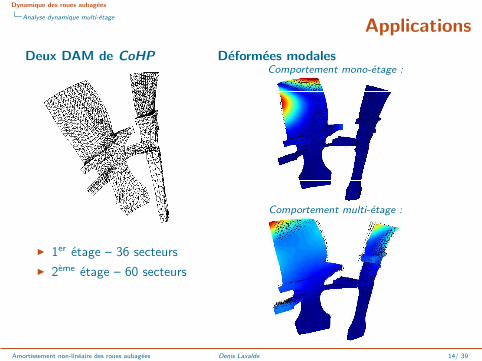
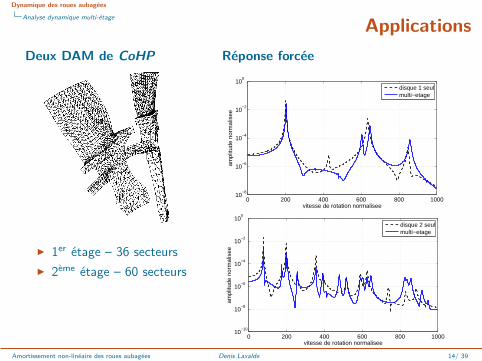
Applications
Deux DAM de CoHP
◮ 1er étage – 36 secteurs◮ 2ème étage – 60 secteurs
Amortissement non-linéaire des roues aubagées Denis Laxalde 14/ 39

Dynamique des roues aubagées
Analyse dynamique multi-étage
Applications
Deux DAM de CoHP
◮ 1er étage – 36 secteurs◮ 2ème étage – 60 secteurs
Situation modale
0 2 4 6 8 10 0
500
1000
1500
nombre de diametres nodaux
freq
uenc
e pr
opre
nor
mal
isee
× étage 1 seul
+ étage 2 seul
� multi-étage
Amortissement non-linéaire des roues aubagées Denis Laxalde 14/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
Applications
Deux DAM de CoHP
◮ 1er étage – 36 secteurs◮ 2ème étage – 60 secteurs
Déformées modalesComportement mono-étage :
Comportement multi-étage :
Amortissement non-linéaire des roues aubagées Denis Laxalde 14/ 39
Dynamique des roues aubagées
Analyse dynamique multi-étage
Applications
Deux DAM de CoHP
◮ 1er étage – 36 secteurs◮ 2ème étage – 60 secteurs
Réponse forcée
0 200 400 600 800 100010
−8
10−6
10−4
10−2
100
vitesse de rotation normalisee
ampl
itude
nor
mal
isee
disque 1 seulmulti−etage
0 200 400 600 800 100010
−10
10−8
10−6
10−4
10−2
100
vitesse de rotation normalisee
ampl
itude
nor
mal
isee
disque 2 seulmulti−etage
Amortissement non-linéaire des roues aubagées Denis Laxalde 14/ 39

Analyse non-linéaire fréquentielle
Sommaire
Introduction
Dynamique des roues aubagées
Analyse non-linéaire fréquentielleMotivationsModes complexes non-linéairesApplication à un système simpleRéponse forcée
Étude d’amortisseurs non-linéaires
Conclusions et perspectives
Analyse non-linéaire fréquentielle
Motivations
Motivations
Objectifs :◮ Analyse dynamique de systèmes non-linéaires
Mx(t) + C x(t) + Kx(t) + f(x, x) = 0 ou p(t)
◮ Non-linéarités dissipatives : frottement, . . .
Amortissement non-linéaire des roues aubagées Denis Laxalde 16/ 39
Analyse non-linéaire fréquentielle
Motivations
Motivations
Objectifs :◮ Analyse dynamique de systèmes non-linéaires
Mx(t) + C x(t) + Kx(t) + f(x, x) = 0 ou p(t)
◮ Non-linéarités dissipatives : frottement, . . .
Applications aux roues aubagées :◮ Symétrie cyclique◮ Réponse forcée◮ Flottement (description modale, stabilité, cycles limites)
Amortissement non-linéaire des roues aubagées Denis Laxalde 16/ 39
Analyse non-linéaire fréquentielle
Motivations
Motivations
Objectifs :◮ Analyse dynamique de systèmes non-linéaires
Mx(t) + C x(t) + Kx(t) + f(x, x) = 0 ou p(t)
◮ Non-linéarités dissipatives : frottement, . . .
Applications aux roues aubagées :◮ Symétrie cyclique◮ Réponse forcée◮ Flottement (description modale, stabilité, cycles limites)
Choix méthodologiques :◮ Méthodes fréquentielles – Balance harmonique
◮ Approche modale pour les systèmes dissipatifs◮ Modélisation des interfaces en contact et frottement
Amortissement non-linéaire des roues aubagées Denis Laxalde 16/ 39
Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Modes complexes non-linéaires
DefinitionUn mode complexe non-linéaire est une oscillation du système autonomenon-conservatif présentant (potentiellement) un déphasage entre sescoordonnées.
Amortissement non-linéaire des roues aubagées Denis Laxalde 17/ 39
Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Modes complexes non-linéaires
DefinitionUn mode complexe non-linéaire est une oscillation du système autonomenon-conservatif présentant (potentiellement) un déphasage entre sescoordonnées.
◮ Valeur propre complexe :λ = −β + iω
◮ Série de Fourier :
x(t) =
Nh∑
n=0
enλtXn
◮ Vecteur propre complexe :
X = {Xℜn +iXℑn , n = 1, · · · ,Nh}
Amortissement non-linéaire des roues aubagées Denis Laxalde 17/ 39

Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Modes complexes non-linéaires
DefinitionUn mode complexe non-linéaire est une oscillation du système autonomenon-conservatif présentant (potentiellement) un déphasage entre sescoordonnées.
◮ Valeur propre complexe :λ = −β + iω
◮ Série de Fourier :
x(t) =
Nh∑
n=0
enλtXn
◮ Vecteur propre complexe :
X = {Xℜn +iXℑn , n = 1, · · · ,Nh}
Ex. :
m1 m2
k1, c1 k2µN
Trajectoires pour différentes énergies :
−0.5 0 0.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
deplacement, masse 1
depl
acem
ent,
mas
se 2
Amortissement non-linéaire des roues aubagées Denis Laxalde 17/ 39

Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Formulation fréquentielle
Problème aux valeurs propres complexes non-linéaires
Trouver {λ,X} tel que Z (λ) X + F (X) = 0
Z (λ) = diag(Zn), Zn = (nλ)2M + nλC + K
Amortissement non-linéaire des roues aubagées Denis Laxalde 18/ 39
Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Formulation fréquentielle
Problème aux valeurs propres complexes non-linéaires
Trouver {λ,X} tel que Z (λ) X + F (X) = 0
Z (λ) = diag(Zn), Zn = (nλ)2M + nλC + K
◮ Définition de l’amplitude modale :
q = qℜ + iqℑ
Amortissement non-linéaire des roues aubagées Denis Laxalde 18/ 39
Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Formulation fréquentielle
Problème aux valeurs propres complexes non-linéaires
Trouver {λ,X} tel que Z (λ) X + F (X) = 0
Z (λ) = diag(Zn), Zn = (nλ)2M + nλC + K
◮ Définition de l’amplitude modale :
q = qℜ + iqℑ
◮ Normalisation du mode :
X = Φℜqℜ + iΦℑqℑ
Amortissement non-linéaire des roues aubagées Denis Laxalde 18/ 39
Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Formulation fréquentielle
Problème aux valeurs propres complexes non-linéaires
Trouver {λ,X} tel que Z (λ) X + F (X) = 0
Z (λ) = diag(Zn), Zn = (nλ)2M + nλC + K
◮ Définition de l’amplitude modale :
q = qℜ + iqℑ
◮ Normalisation du mode :
X = Φℜqℜ + iΦℑqℑ
◮ Continuation selon l’amplitude modale
Amortissement non-linéaire des roues aubagées Denis Laxalde 18/ 39

Analyse non-linéaire fréquentielle
Modes complexes non-linéaires
Formulation fréquentielle
Problème aux valeurs propres complexes non-linéaires
Trouver {λ,X} tel que Z (λ) X + F (X) = 0
Z (λ) = diag(Zn), Zn = (nλ)2M + nλC + K
◮ Définition de l’amplitude modale :
q = qℜ + iqℑ
◮ Normalisation du mode :
X = Φℜqℜ + iΦℑqℑ
◮ Continuation selon l’amplitude modale◮ F (X), vecteur fréquentiel des forces NL, calculé par Alternance
Fréquentielle-Temporelle :
X x(t), x(t) f(x, x) FiDFT DFTLoi NL
Amortissement non-linéaire des roues aubagées Denis Laxalde 18/ 39
Analyse non-linéaire fréquentielle
Application à un système simple
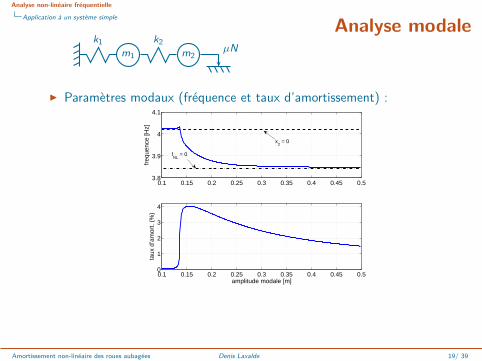
Analyse modalem1 m2
k1 k2µN
◮ Paramètres modaux (fréquence et taux d’amortissement) :
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
1
2
3
4
amplitude modale [m]
taux
d’a
mor
t. (%
)
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.53.8
3.9
4
4.1
freq
uenc
e [H
z]x
2 = 0
fNL
= 0
Amortissement non-linéaire des roues aubagées Denis Laxalde 19/ 39
Analyse non-linéaire fréquentielle
Application à un système simple
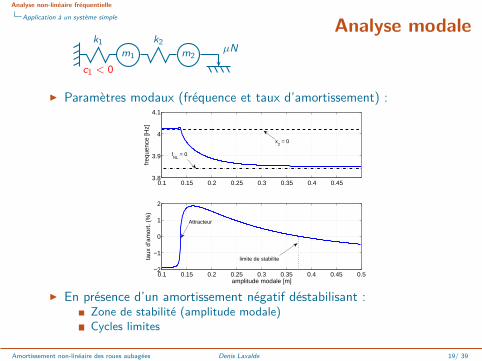
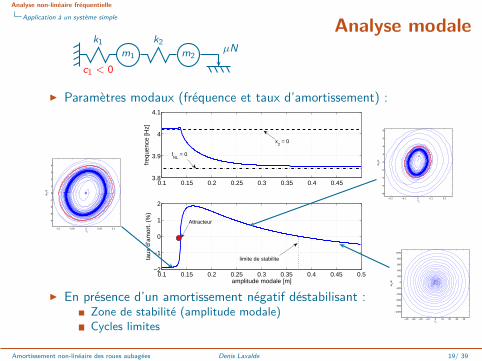
Analyse modalem1 m2
k1
c1 < 0
k2µN
◮ Paramètres modaux (fréquence et taux d’amortissement) :
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.453.8
3.9
4
4.1
freq
uenc
e [H
z]
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−2
−1
0
1
2
amplitude modale [m]
taux
d’a
mor
t. (%
)x
2 = 0
fNL
= 0
Attracteur
limite de stabilite
◮ En présence d’un amortissement négatif déstabilisant :Zone de stabilité (amplitude modale)Cycles limites
Amortissement non-linéaire des roues aubagées Denis Laxalde 19/ 39
Analyse non-linéaire fréquentielle
Application à un système simple
Analyse modalem1 m2
k1
c1 < 0
k2µN
◮ Paramètres modaux (fréquence et taux d’amortissement) :
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.453.8
3.9
4
4.1
freq
uenc
e [H
z]
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−2
−1
0
1
2
amplitude modale [m]
taux
d’a
mor
t. (%
)x
2 = 0
fNL
= 0
Attracteur
limite de stabilite
◮ En présence d’un amortissement négatif déstabilisant :Zone de stabilité (amplitude modale)Cycles limites
−0.1 −0.05 0 0.05 0.1
−4
−3
−2
−1
0
1
2
3
4
x2
dx2/d
t
−0.2 −0.1 0 0.1 0.2
−8
−6
−4
−2
0
2
4
6
8
x2
dx2/d
t
−40 −30 −20 −10 0 10 20 30 40
−1000
−800
−600
−400
−200
0
200
400
600
800
1000
x2
dx2/d
t
bC
Amortissement non-linéaire des roues aubagées Denis Laxalde 19/ 39
Analyse non-linéaire fréquentielle
Réponse forcée
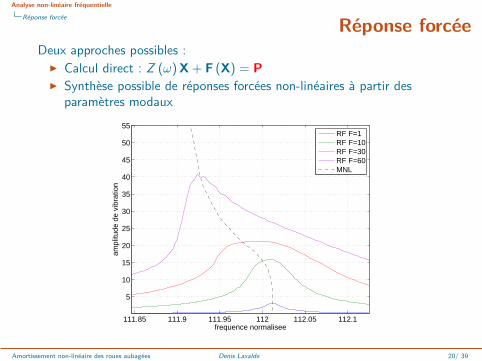
Réponse forcéeDeux approches possibles :
◮ Calcul direct : Z (ω) X + F (X) = P◮ Synthèse possible de réponses forcées non-linéaires à partir des
paramètres modaux
111.85 111.9 111.95 112 112.05 112.1
5
10
15
20
25
30
35
40
45
50
55
frequence normalisee
ampl
itude
de
vibr
atio
n
RF F=1RF F=10RF F=30RF F=60MNL
Amortissement non-linéaire des roues aubagées Denis Laxalde 20/ 39

Étude d’amortisseurs non-linéaires
Sommaire
Introduction
Dynamique des roues aubagées
Analyse non-linéaire fréquentielle
Étude d’amortisseurs non-linéairesJoncs de friction : étude numériqueJoncs de friction : étude expérimentalePompage énergétique
Conclusions et perspectives
Étude d’amortisseurs non-linéaires
Joncs de friction : étude numérique
Amortissement par joncs de friction
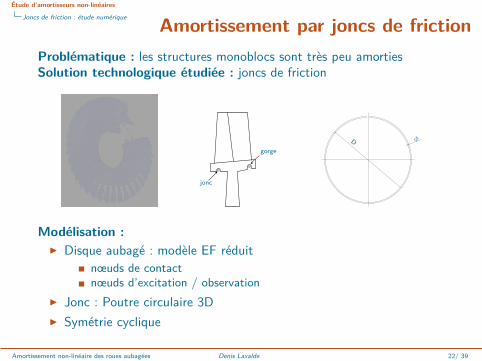
Problématique : les structures monoblocs sont très peu amortiesSolution technologique étudiée : joncs de friction
jonc
gorge
φD
Modélisation :◮ Disque aubagé : modèle EF réduit
nœuds de contactnœuds d’excitation / observation
◮ Jonc : Poutre circulaire 3D◮ Symétrie cyclique
Amortissement non-linéaire des roues aubagées Denis Laxalde 22/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude numérique
Modélisation du contact
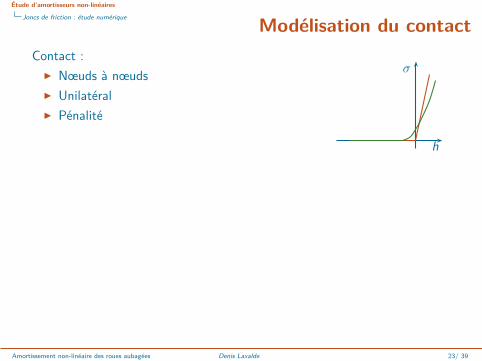
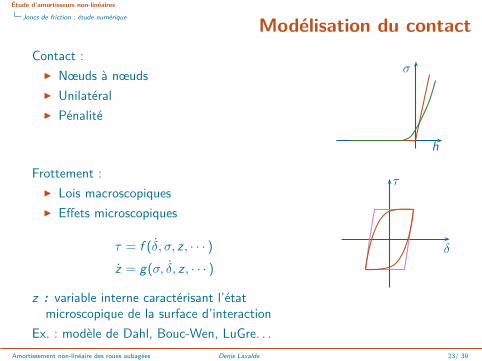
Contact :◮ Nœuds à nœuds◮ Unilatéral◮ Pénalité
h
σ
Amortissement non-linéaire des roues aubagées Denis Laxalde 23/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude numérique
Modélisation du contact
Contact :◮ Nœuds à nœuds◮ Unilatéral◮ Pénalité
h
σ
Frottement :◮ Lois macroscopiques◮ Effets microscopiques
τ = f (δ, σ, z , · · · )z = g(σ, δ, z , · · · )
z : variable interne caractérisant l’étatmicroscopique de la surface d’interaction
Ex. : modèle de Dahl, Bouc-Wen, LuGre. . .
δ
τ
Amortissement non-linéaire des roues aubagées Denis Laxalde 23/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude numérique
Analyse modale
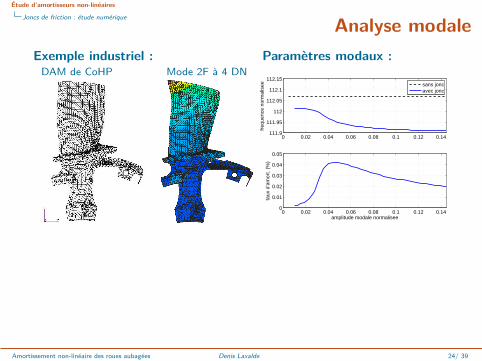
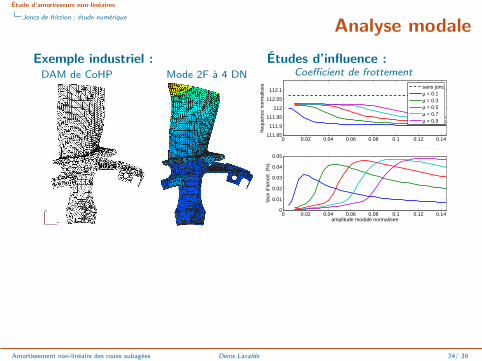
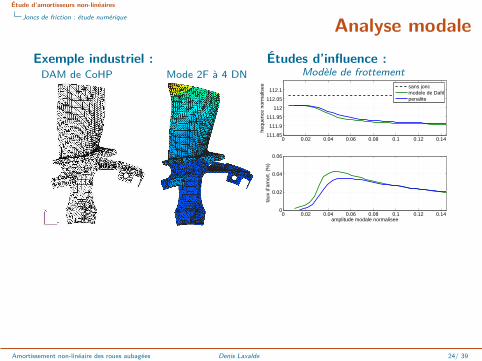
Exemple industriel :DAM de CoHP Mode 2F à 4 DN
Paramètres modaux :
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14111.9
111.95
112
112.05
112.1
112.15
freq
uenc
e no
rmal
isee
0 0.02 0.04 0.06 0.08 0.1 0.12 0.140
0.01
0.02
0.03
0.04
0.05
amplitude modale normalisee
taux
d’a
mor
t. (%
)
sans joncavec jonc
Amortissement non-linéaire des roues aubagées Denis Laxalde 24/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude numérique
Analyse modale
Exemple industriel :DAM de CoHP Mode 2F à 4 DN
Études d’influence :Coefficient de frottement
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14111.85
111.9
111.95
112
112.05
112.1
freq
uenc
e no
rmal
isee
0 0.02 0.04 0.06 0.08 0.1 0.12 0.140
0.01
0.02
0.03
0.04
0.05
amplitude modale normalisee
taux
d’a
mor
t. (%
)
sans joncµ = 0.1µ = 0.3µ = 0.5µ = 0.7µ = 0.9
Amortissement non-linéaire des roues aubagées Denis Laxalde 24/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude numérique
Analyse modale
Exemple industriel :DAM de CoHP Mode 2F à 4 DN
Études d’influence :Modèle de frottement
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14111.85
111.9
111.95
112
112.05
112.1
freq
uenc
e no
rmal
isee
0 0.02 0.04 0.06 0.08 0.1 0.12 0.140
0.02
0.04
0.06
amplitude modale normalisee
taux
d’a
mor
t. (%
)
sans joncmodele de Dahlpenalite
Amortissement non-linéaire des roues aubagées Denis Laxalde 24/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude numérique
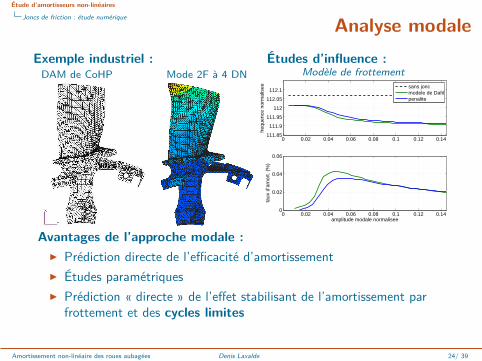
Analyse modale
Exemple industriel :DAM de CoHP Mode 2F à 4 DN
Études d’influence :Modèle de frottement
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14111.85
111.9
111.95
112
112.05
112.1
freq
uenc
e no
rmal
isee
0 0.02 0.04 0.06 0.08 0.1 0.12 0.140
0.02
0.04
0.06
amplitude modale normalisee
taux
d’a
mor
t. (%
)
sans joncmodele de Dahlpenalite
Avantages de l’approche modale :◮ Prédiction directe de l’efficacité d’amortissement◮ Études paramétriques◮ Prédiction « directe » de l’effet stabilisant de l’amortissement par
frottement et des cycles limites
Amortissement non-linéaire des roues aubagées Denis Laxalde 24/ 39
Étude d’amortisseurs non-linéaires
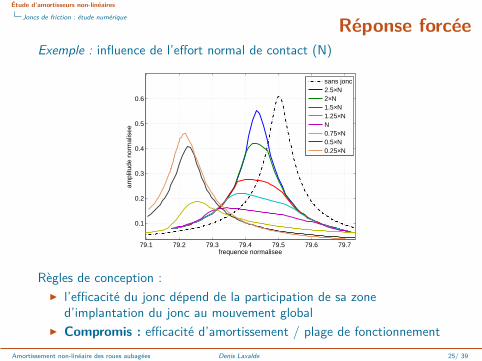
Joncs de friction : étude numérique
Réponse forcéeExemple : influence de l’effort normal de contact (N)
79.1 79.2 79.3 79.4 79.5 79.6 79.7
0.1
0.2
0.3
0.4
0.5
0.6
frequence normalisee
ampl
itude
nor
mal
isee
sans jonc2.5×N2×N1.5×N1.25×NN0.75×N0.5×N0.25×N
Règles de conception :◮ l’efficacité du jonc dépend de la participation de sa zone
d’implantation du jonc au mouvement global◮ Compromis : efficacité d’amortissement / plage de fonctionnement
Amortissement non-linéaire des roues aubagées Denis Laxalde 25/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
Étude expérimentaleObjectifs :
◮ Évaluation des performances amortissantes◮ Compréhension des phénomènes d’amortissement par frottement◮ Validation et calibration les outils de simulation
Amortissement non-linéaire des roues aubagées Denis Laxalde 26/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
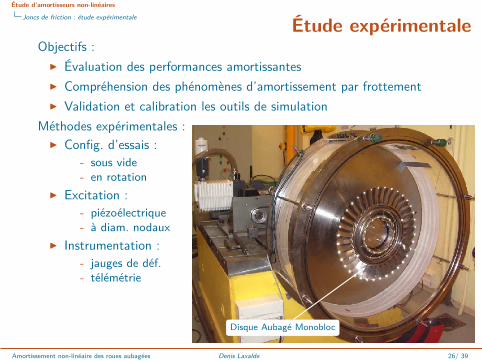
Étude expérimentaleObjectifs :
◮ Évaluation des performances amortissantes◮ Compréhension des phénomènes d’amortissement par frottement◮ Validation et calibration les outils de simulation
Méthodes expérimentales :◮ Config. d’essais :
- sous vide- en rotation
◮ Excitation :- piézoélectrique- à diam. nodaux
◮ Instrumentation :- jauges de déf.- télémétrie
Disque Aubagé Monobloc
Amortissement non-linéaire des roues aubagées Denis Laxalde 26/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
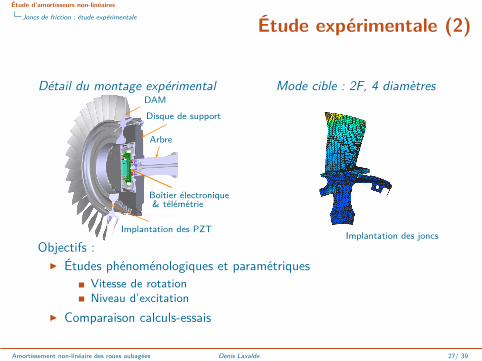
Étude expérimentale (2)
Détail du montage expérimentalDAM
Disque de support
Arbre
Boîtier électronique& télémétrie
Implantation des PZT
Mode cible : 2F, 4 diamètres
Implantation des joncsObjectifs :
◮ Études phénoménologiques et paramétriquesVitesse de rotationNiveau d’excitation
◮ Comparaison calculs-essais
Amortissement non-linéaire des roues aubagées Denis Laxalde 27/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
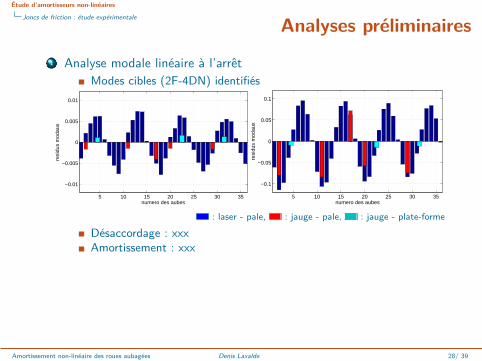
Analyses préliminaires
1 Analyse modale linéaire à l’arrêtModes cibles (2F-4DN) identifiés
5 10 15 20 25 30 35
−0.01
−0.005
0
0.005
0.01
numero des aubes
resi
dus
mod
aux
5 10 15 20 25 30 35
−0.1
−0.05
0
0.05
0.1
numero des aubes
resi
dus
mod
aux
: laser - pale, : jauge - pale, : jauge - plate-forme
Désaccordage : xxxAmortissement : xxx
Amortissement non-linéaire des roues aubagées Denis Laxalde 28/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
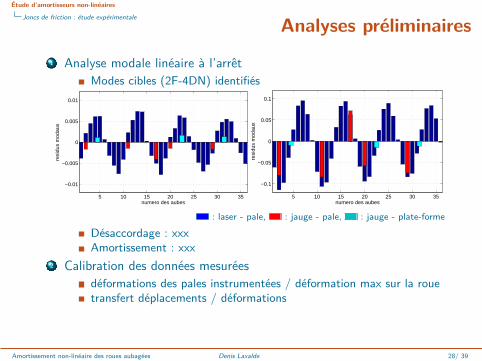
Analyses préliminaires
1 Analyse modale linéaire à l’arrêtModes cibles (2F-4DN) identifiés
5 10 15 20 25 30 35
−0.01
−0.005
0
0.005
0.01
numero des aubes
resi
dus
mod
aux
5 10 15 20 25 30 35
−0.1
−0.05
0
0.05
0.1
numero des aubes
resi
dus
mod
aux
: laser - pale, : jauge - pale, : jauge - plate-forme
Désaccordage : xxxAmortissement : xxx
2 Calibration des données mesuréesdéformations des pales instrumentées / déformation max sur la rouetransfert déplacements / déformations
Amortissement non-linéaire des roues aubagées Denis Laxalde 28/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
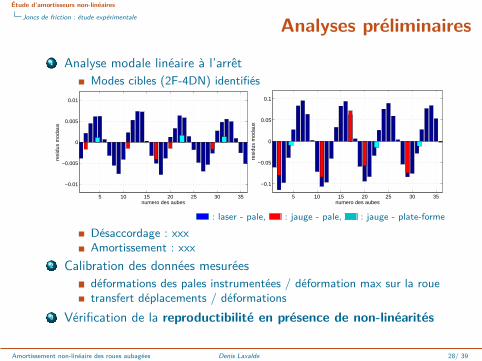
Analyses préliminaires
1 Analyse modale linéaire à l’arrêtModes cibles (2F-4DN) identifiés
5 10 15 20 25 30 35
−0.01
−0.005
0
0.005
0.01
numero des aubes
resi
dus
mod
aux
5 10 15 20 25 30 35
−0.1
−0.05
0
0.05
0.1
numero des aubes
resi
dus
mod
aux
: laser - pale, : jauge - pale, : jauge - plate-forme
Désaccordage : xxxAmortissement : xxx
2 Calibration des données mesuréesdéformations des pales instrumentées / déformation max sur la rouetransfert déplacements / déformations
3 Vérification de la reproductibilité en présence de non-linéarités
Amortissement non-linéaire des roues aubagées Denis Laxalde 28/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
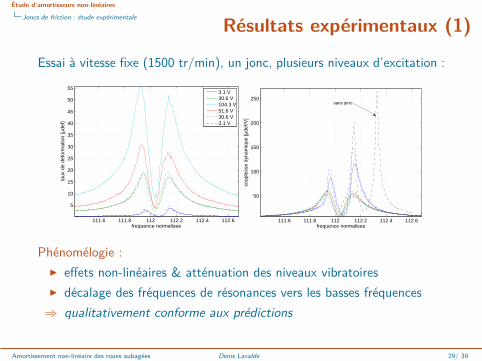
Résultats expérimentaux (1)
Essai à vitesse fixe (1500 tr/min), un jonc, plusieurs niveaux d’excitation :
111.6 111.8 112 112.2 112.4 112.6
5
10
15
20
25
30
35
40
45
50
55
frequence normalisee
taux
de
defo
rmat
ion
[µde
f]
3.1 V30.6 V104.3 V51.6 V30.6 V3.1 V
111.6 111.8 112 112.2 112.4 112.6
50
100
150
200
250
frequence normalisee
soup
less
e dy
nam
ique
[µde
f/V]
sans jonc
Phénomélogie :◮ effets non-linéaires & atténuation des niveaux vibratoires◮ décalage des fréquences de résonances vers les basses fréquences
⇒ qualitativement conforme aux prédictions
Amortissement non-linéaire des roues aubagées Denis Laxalde 29/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
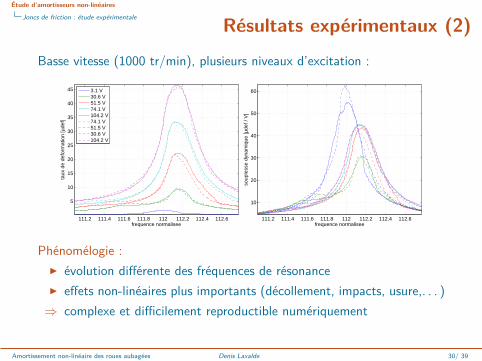
Résultats expérimentaux (2)
Basse vitesse (1000 tr/min), plusieurs niveaux d’excitation :
111.2 111.4 111.6 111.8 112 112.2 112.4 112.6
5
10
15
20
25
30
35
40
45
frequence normalisee
taux
de
defo
rmat
ion
[µde
f]
3.1 V30.6 V51.5 V74.1 V104.2 V74.1 V51.5 V30.6 V104.2 V
111.2 111.4 111.6 111.8 112 112.2 112.4 112.6
10
20
30
40
50
60
frequence normalisee
soup
less
e dy
nam
ique
[µde
f / V
]
Phénomélogie :◮ évolution différente des fréquences de résonance◮ effets non-linéaires plus importants (décollement, impacts, usure,. . . )
⇒ complexe et difficilement reproductible numériquement
Amortissement non-linéaire des roues aubagées Denis Laxalde 30/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
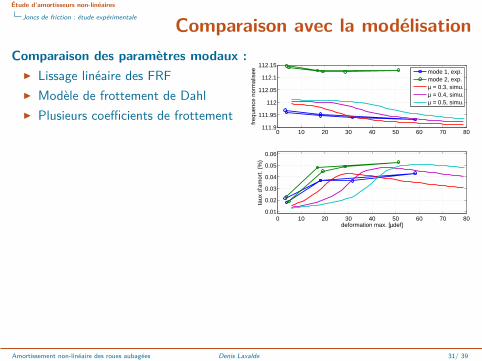
Comparaison avec la modélisation
Comparaison des paramètres modaux :◮ Lissage linéaire des FRF◮ Modèle de frottement de Dahl◮ Plusieurs coefficients de frottement
0 10 20 30 40 50 60 70 80111.9
111.95
112
112.05
112.1
112.15
freq
uenc
e no
rmal
isee
0 10 20 30 40 50 60 70 800.01
0.02
0.03
0.04
0.05
0.06
deformation max. [µdef]
taux
d’a
mor
t. (%
)
mode 1, exp.mode 2, exp.µ = 0.3, simu.µ = 0.4, simu.µ = 0.5, simu.
Amortissement non-linéaire des roues aubagées Denis Laxalde 31/ 39
Étude d’amortisseurs non-linéaires
Joncs de friction : étude expérimentale
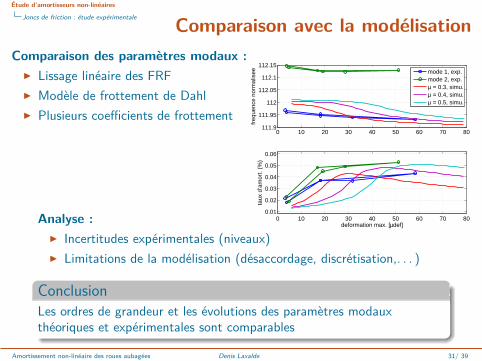
Comparaison avec la modélisation
Comparaison des paramètres modaux :◮ Lissage linéaire des FRF◮ Modèle de frottement de Dahl◮ Plusieurs coefficients de frottement
0 10 20 30 40 50 60 70 80111.9
111.95
112
112.05
112.1
112.15
freq
uenc
e no
rmal
isee
0 10 20 30 40 50 60 70 800.01
0.02
0.03
0.04
0.05
0.06
deformation max. [µdef]
taux
d’a
mor
t. (%
)
mode 1, exp.mode 2, exp.µ = 0.3, simu.µ = 0.4, simu.µ = 0.5, simu.
Analyse :◮ Incertitudes expérimentales (niveaux)◮ Limitations de la modélisation (désaccordage, discrétisation,. . . )
ConclusionLes ordres de grandeur et les évolutions des paramètres modauxthéoriques et expérimentales sont comparables
Amortissement non-linéaire des roues aubagées Denis Laxalde 31/ 39
Étude d’amortisseurs non-linéaires
Pompage énergétique
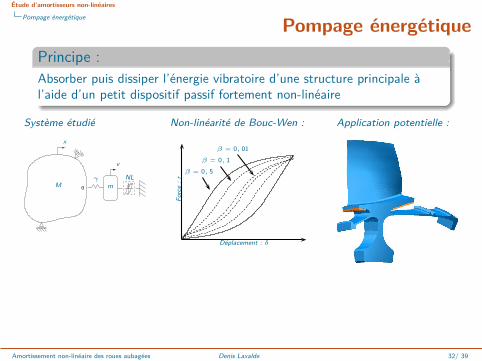
Pompage énergétique
Principe :Absorber puis dissiper l’énergie vibratoire d’une structure principale àl’aide d’un petit dispositif passif fortement non-linéaire
Système étudié
0M mγ
x
v
NL
Non-linéarité de Bouc-Wen :
For
ce:
r
Déplacement : δ
β = 0, 5
β = 0, 1
β = 0, 01
Application potentielle :
Amortissement non-linéaire des roues aubagées Denis Laxalde 32/ 39

Étude d’amortisseurs non-linéaires
Pompage énergétique
Pompage énergétique
Principe :Absorber puis dissiper l’énergie vibratoire d’une structure principale àl’aide d’un petit dispositif passif fortement non-linéaire
Système étudié
0M mγ
x
v
NL
Non-linéarité de Bouc-Wen :
For
ce:
r
Déplacement : δ
β = 0, 5
β = 0, 1
β = 0, 01
Application potentielle :
◮ Mise en œuvre des approches fréquentielles développéesAnalyse modaleComparaison et validation par analyses temporelles (régimetransitoire, flottement)
◮ Critères de conception
Amortissement non-linéaire des roues aubagées Denis Laxalde 32/ 39
Étude d’amortisseurs non-linéaires
Pompage énergétique
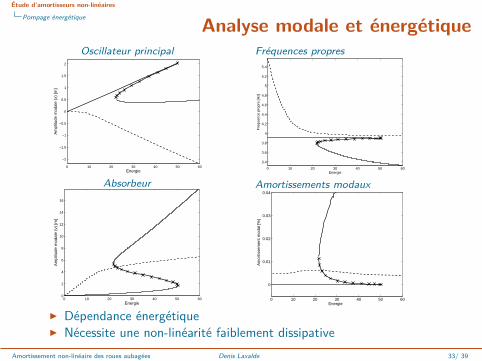
Analyse modale et énergétiqueOscillateur principal
0 10 20 30 40 50 60
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Energie
Am
plitu
de m
odal
e (x
) [m
]
Absorbeur
0 10 20 30 40 50 600
2
4
6
8
10
12
14
16
Energie
Am
plitu
de m
odal
e (v
) [m
]Fréquences propres
0 10 20 30 40 50 60
3.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5
5.2
5.4
Energie
Fre
quen
ce p
ropr
e [H
z]
Amortissements modaux
0 10 20 30 40 50 60
0
0.01
0.02
0.03
0.04
Energie
Am
ortis
sem
ent m
odal
[%]
◮ Dépendance énergétique◮ Nécessite une non-linéarité faiblement dissipative
Amortissement non-linéaire des roues aubagées Denis Laxalde 33/ 39

Étude d’amortisseurs non-linéaires
Pompage énergétique
Régime transitoire
◮ Réponse impulsionnelle : x(t = 0) =√
2h, x(t = 0) = 0
Réponse temporelle
0 10 20 30 40 50 60 70 80−4
−3
−2
−1
0
1
2
3
4
temps [s]
depl
acem
ent [
m]
0 5 10 15 20 25 30 35 40 45 50−10
−8
−6
−4
−2
0
2
4
6
8
10
temps [s]
depl
acem
ent [
m]
Fréquence instantanée
0 5 10 15 20 25 30 35 40 45 503
3.5
4
4.5
5
5.5
temps [s]
freq
. ins
t. [H
z]0 5 10 15 20 25 30 35 40 45 50
3
3.5
4
4.5
5
5.5
temps [s]
freq
. ins
t. [H
z]
◮ le pompage énergétique a lieu au delà d’un niveau d’énergie seuil◮ comportement conforme aux prédictions des modes non-linéaires
Amortissement non-linéaire des roues aubagées Denis Laxalde 34/ 39
Étude d’amortisseurs non-linéaires
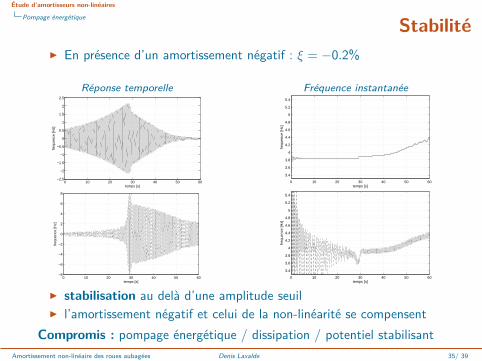
Pompage énergétique
Stabilité◮ En présence d’un amortissement négatif : ξ = −0.2%
Réponse temporelle
0 10 20 30 40 50 60−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
temps [s]
freq
uenc
e [H
z]
0 10 20 30 40 50 60−8
−6
−4
−2
0
2
4
6
8
temps [s]
freq
uenc
e [H
z]
Fréquence instantanée
0 10 20 30 40 50 60
3.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5
5.2
5.4
temps [s]
freq
uenc
e [H
z]0 10 20 30 40 50 60
3.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5
5.2
5.4
temps [s]fr
eque
nce
[Hz]
◮ stabilisation au delà d’une amplitude seuil◮ l’amortissement négatif et celui de la non-linéarité se compensent
Compromis : pompage énergétique / dissipation / potentiel stabilisant
Amortissement non-linéaire des roues aubagées Denis Laxalde 35/ 39
Conclusions et perspectives
Sommaire
Introduction
Dynamique des roues aubagées
Analyse non-linéaire fréquentielle
Étude d’amortisseurs non-linéaires
Conclusions et perspectives
Conclusions et perspectives
Principales contributions
1 Modélisation multi-étageSymétrie cyclique multi-étageIndustrialisation dans un code EF
Amortissement non-linéaire des roues aubagées Denis Laxalde 37/ 39

Conclusions et perspectives
Principales contributions
1 Modélisation multi-étageSymétrie cyclique multi-étageIndustrialisation dans un code EF
2 Analyse non-linéaire et étude d’amortisseurs non-linéairesMéthode des modes non-linéaires complexesModélisation des joncs de frictionDéveloppement d’un banc d’essaisApplications sur des cas moteurs, industrialisationÉtude du pompage énergétique pour des non-linéaritéshystérétiques
Amortissement non-linéaire des roues aubagées Denis Laxalde 37/ 39
Conclusions et perspectives
Perspectives scientifiques et industrielles
1 Analyses multi-étages :Critères et pratiques de conception multi-étageIntégration du désaccordage (aléatoire, volontaire)
Amortissement non-linéaire des roues aubagées Denis Laxalde 38/ 39
Conclusions et perspectives
Perspectives scientifiques et industrielles
1 Analyses multi-étages :Critères et pratiques de conception multi-étageIntégration du désaccordage (aléatoire, volontaire)
2 Analyse non-linéaire et modélisation des interfaces :Analyses de stabilité et étude des bifurcations (approchesmulti-fréquentielles)Couplage aéroélastique (calcul aérodynamique fréquentiel)Enrichissement des modèles de contact et prise en compte des effetsd’usure
Amortissement non-linéaire des roues aubagées Denis Laxalde 38/ 39
Conclusions et perspectives
Perspectives scientifiques et industrielles
1 Analyses multi-étages :Critères et pratiques de conception multi-étageIntégration du désaccordage (aléatoire, volontaire)
2 Analyse non-linéaire et modélisation des interfaces :Analyses de stabilité et étude des bifurcations (approchesmulti-fréquentielles)Couplage aéroélastique (calcul aérodynamique fréquentiel)Enrichissement des modèles de contact et prise en compte des effetsd’usure
3 Étude d’amortisseurs non-linéaires :Joncs de friction : - Études expérimentales supplémentaires
- Corrélation calculs-essaisPompage énergétique : - Réalisation technologique et application
à des structures complexes- Amélioration des modélisations et de
leur représentativité
Amortissement non-linéaire des roues aubagées Denis Laxalde 38/ 39

Soutenance de thèseen vue de l’obtention du titre de
Docteur de l’École Centrale de LyonSpécialité mécanique
Étude d’amortisseurs non-linéaires appliqués auxroues aubagées et aux systèmes multi-étages
Denis Laxalde
Jury d’examen :
A. Berlioz, Professeur, Université Paul Sabatier, ToulouseJ.-C. Golinval, Professeur, Université de LiègeJ.-P. Lombard, Adjoint méthodes en mécanique, SnecmaC. Pierre, Professeur, Université McGill de MontréalC. Gibert, Ingénieur de Recherche, École Centrale de LyonF. Thouverez, Professeur, École Centrale de Lyon
RapporteurRapporteurExaminateurExaminateurExaminateurDirecteur de thèse
Amortissement non-linéaire des roues aubagées Denis Laxalde 39/ 39