Cycles limites de certains systèmes de Liénard...
81
Transcript of Cycles limites de certains systèmes de Liénard...
Cycles limites de certains systèmes de Liénard
généralisés dépendant d'un petit paramètre
Par
Boulfoul Amel
sous la direction de
Pr. Makhlouf Amar
devant le jury
PRSEDENT SISSAOUI Hocine Pr. U.B.M Annaba
EXAMINATEUR KESSI Arezki Pr. USTHB. Alger
EXAINATEUR LAKRIB Mustapha Pr. U. Sidi Bel Abbès
Année universitaire 2012/2013

Résumé
On considère le problème de la recherche des cycles limites de certaines équa-tions diérentielles ordinaires dépendant d'un petit paramètre. Plus précisé-ment, nous appliquons la méthode de moyennisation du premier et secondordre à une classe d'équations diérentielles polynomiales de Liénard généra-lisées dépendant d'un petit paramètre. Notre résultat montre que pour toutn,m ≥ 1 et p ∈ N, il existe des équations diérentielles de la forme
x+ f(x)x2p+1 + g(x) = 0,
où f et g sont des polynômes de degré n et m respectivement, ayant au moinsmax[n/2], [(n − 1)/2] + [m/2] cycles limites. [.] désigne la fonction partie
entière.De même en utilisant la théorie de moyennisation nous avons étudié les solu-tions périodiques de l'équation diérentielle du quatrième ordre
....x + (1 + p2)x+ p2x = εF (t, x, x, x,
...x ),
où p est un rationnel diérent de −1, 0, 1, ε est un petit paramètre réel et Fest une fonction non-autonome périodique par rapport à t.
Mots clés : Équation de Liénard, cycle limite, solution périodique, équation
diérentielle du quatrième ordre, théorie de moyennisation.

Abstract
We apply the averaging theory of rst and second order to a class of thegeneralized polynomial Liénard dierential equations depending on a smallparameter. Our main result shows that for any n,m ≥ 1 there are dierentialequations of the form
x+ f(x)x2p+1 + g(x) = 0,
with p ∈ N, f and g are polynomials of degree n and m respectively, having atleast max[n/2], [(n− 1)/2] + [m/2] limit cycles. [.] denotes the integer part
function.Using averaging theory, we provide sucient conditions for the existence ofperiodic solutions of the fourth-order dierential equation
....x + (1 + p2)x+ p2x = εF (t, x, x, x,
...x ),
where p = p1/p2 with p1, p2 ∈ N and p is dierent from −1, 0, 1. ε is a smallreal parameter, and F is a non-autonomous periodic function with respect to t.
Keywords : Liénard equation, limit cycle, periodic orbit, fourth-order dierential
equation, averaging theory.

Remerciements
Je remercie tout d'abord mon encadreur Amar Makhlouf, professeur àl'université d'Annaba de m'avoir guidé avec autant d'écoute vers un sujet derecherche qui corresponde à mes attentes. La conance qu'il m'a accordéeainsi que sa bienveillance m'ont permit d'initier et mener mes travaux derecherche plus sereinement.
Je remercie vivement le professeur H. Sissaoui pour avoir accepté deprésider le jury.
Mes remercie vont également aux professeurs Mustapha Lakrib et ArezkiKessi sans oublier Abd El Hamid Laouar pour l'honneur qu'ils m'ont fait enacceptant de faire partie du jury.
Enn, merci a mes parents qui m'ont toujours encouragé et soutenu soustoutes formes et ont toujours cru en ma volonté de réussir.
Merci a tous...

Table des matières
Introduction générale . . . . . . . . . . . . . . . . . . . . . . . . 2
I Notions préliminaires 10
I.1 Systèmes dynamiques, points d'équilibre . . . . . . . . . . . . 11I.2 Classication des points d'équilibre . . . . . . . . . . . . . . . 12I.3 Portrait de phase et cycles limites . . . . . . . . . . . . . . . . 13I.4 Intégrabilité des systèmes diérentiels . . . . . . . . . . . . . . 14
II Méthode de G/N 16
II.1 Présentation de l'algorithme de G/N . . . . . . . . . . . . . . 17II.1.1 Algorithme appliqué sur le système de Van-der Pol . . 18II.1.2 Lien entre les racines de Rn(x) et les trajectoires pério-
diques . . . . . . . . . . . . . . . . . . . . . . . . . . . 19II.1.3 Quelques exemples . . . . . . . . . . . . . . . . . . . . 22
II.2 Méthodes de Melnikov et de relaxation . . . . . . . . . . . . . 25II.3 Amélioration de l'algorithme de G/N . . . . . . . . . . . . . . 28
II.3.1 Comparaison entre Rn(x) et Rn(a) . . . . . . . . . . . 29II.4 Exemples sur des fonctions non polynomiales . . . . . . . . . 30
IIICycles limites des systèmes polynomiaux de Liénard généra-
lisés 37
III.1 Théorie de moyennisation . . . . . . . . . . . . . . . . . . . . 38III.1.1 Méthode de moyennisation du premier ordre . . . . . 40III.1.2 Méthode de moyennisation du second ordre . . . . . . 42
III.2 Nombre maximum de cycles limites par la méthode de moyen-nisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44III.2.1 Théorème III.4 . . . . . . . . . . . . . . . . . . . . . . 46
III.3 Démonstration du théorème III.4 . . . . . . . . . . . . . . . . 46III.3.1 Démonstration de la partie (a) du théorème III.4 . . . 46III.3.2 Démonstration de la partie (b) du théorème III.4 . . . 48
1

Table des matières
IV Solutions périodiques d'une classe d'équations diérentielles
du quatrième ordre 55
IV.1 Autres théorèmes de moyennisation . . . . . . . . . . . . . . . 56IV.2 Recherche des solutions périodiques de l'équation (IV.1.7) . . . 58
IV.2.1 Théorème IV.3 . . . . . . . . . . . . . . . . . . . . . . 58IV.2.2 Preuve du Théorème IV.3 . . . . . . . . . . . . . . . . 59
IV.3 Applications du théorème IV.3 . . . . . . . . . . . . . . . . . . 62IV.3.1 Corollaire 1 . . . . . . . . . . . . . . . . . . . . . . . . 62IV.3.2 Corollaire 2 . . . . . . . . . . . . . . . . . . . . . . . . 63
Conclusion et perspectives 65
Annexes 66
Bibliographie 72
2

Introduction générale
Quand Henri Poincaré a commencé à s'intéresser aux équations diéren-tielles, il a introduit trois changements majeurs dans la façon d'étudier leséquations diérentielles. Il décide d'étudier la solution de manière globale,c'est à dire l'espace des phases dans son ensemble. Il abandonne la variablecomplexe et étudie dés lors des fonctions réelles à variables réelles.Il géomé-trise le problème. Poincaré compris le caractère utopique de vouloir calculerune approximation du comportement asymptotique de la solution et décidad'étudier en premier lieu le comportement qualitatif des solutions avant deles calculer de manière numérique. Il justia même cette orientation en ar-guant que parfois l'étude qualitative seule surait pour comprendre certainsproblèmes. Le qualitatif lui t prendre une orientation géométrique et il semit à étudier les courbes dénies par les solutions des équations diérentiellesplutôt que les fonctions solutions elle même.
Liapunov (1907) fut le premier mathématicien russe à suivre les traces dePoincaré. Il étudia la stabilité du mouvement en utilisant une fonction deforce qu'il note V (x, y). Il établi une technique pour déterminer la stabilitéd'un point d'équilibre. Grâce à cette technique, on peut tester la stabilitéd'une solution sans connaitre l'expression analytique des solutions. La fonc-tion qu'il a introduite est maintenant appelée fonction de Liapunov.
En général par système dynamique, on sous entend tout système qui évolueau cours du temps. Cette évolution est décrite par des équations diérentiellesou des applications. L'étude des systèmes dynamiques traite donc l'évolutiontemporelle des systèmes physiques, économiques, chimiques...etc
Un cycles limite d'un système dynamique est une orbite périodique isolée. Unsystème dynamique qui possède un cycle limite quelques soient les conditionsinitiales ne peut être linéaire. Car s'il était linéaire, toute solution x(t) indui-rait par principe de superposition que la fonction αx(t), (α ∈ R) soit aussisolution. Ainsi il y aurait une bande continue de trajectoires périodiques dansl'espace des phases. Pour avoir des trajectoires périodiques isolées dans l'es-pace des phases, il faut donc que le système soit non linéaire.
3
Introduction générale
Avec l'avènement de l'ordinateur, on peut s'attaquer à la deuxième partie duplan de Poincaré quand à la résolution des équations diérentielles : le calculnumérique. Mais il faut faire attention aux limites du calcul numérique. Lecalcul numérique vient après l'étude qualitative des solutions. Car la précisionde l'ordinateur est limitée et les algorithmes utilisés ne fournissent que des ap-proximations aux solutions sur des intervalles de temps bornés. L'utilisationde l'ordinateur seul peut induire en erreur : par exemple, l'algorithme d'Eulerappliqué à la résolution numérique du système linéaire simple :
x = y,
y = −x
fournit des approximations des trajectoires du type foyer instable alors queles trajectoires réelles du système sont des orbites périodiques non-isolées(centre).L'étude qualitative, surtout pour les systèmes non-linéaires, reste donc unpréalable nécessaire à l'étude complète de leurs solutions. L'étude numériquepermet d'aner les résultats qualitatifs.
Le mathématicien David Hilbert présenta, lors du deuxième congrès inter-national de mathématiques (été 1900), 23 problèmes "dont l'avenir attend larésolution grâce aux nouvelles méthodes qui seront découvertes dans le sièclequi commence". Le problème numéro 16 est de déterminer le nombre maximalet la position relative des cycles limites qu'un système polynomial planaire dedegré n puisse avoir. On note Hn ce nombre maximal. Dulac (1923) proposaune démonstration assurant que Hn est ni pour tout n. Mais sa démonstra-tion comportait une erreur. La résolution de ce problème de Dulac a été faitede façon indépendante par Ilyashenko (1991) et Ecalle, Martinet & Moussu(1987)puis Ecalle (1992). Cette résolution permet de montrer queHn <∞. Pe-trovsky & Landis (1957) crurent trouver la valeur de H2 mais ils s'aperçurentd'une erreur dans leur propre démonstration (Landis & Petrovski, 1967) avantque celui-ci ne soit inrmée par un contre exemple de Shi (1982) dans lequelun système quadratique a 4 cycles limites. Ainsi, si Hn est un nombre nipour tout n, la seule chose que l'on sache est que H2 ≥ 4 et H3 ≥ 11 (Jibin &Chunfu, 1985 ; Zoladek, 1995). Christopher & lLOYD (1995) ont donné uneborne inférieur au nombre Hn : Hn ≥ n2 log(n).
Steve Smale, à l'occasion du soixantième anniversaire d'Arnold, a exposé 18problèmes. Ici l'accent est mis sur une classe particulière des systèmes pla-naires : Les systèmes de Liénard. Devant la diculté du problème général, lesmathématiciens s'orientent dans deux directions diérentes :
4

Introduction générale
Étudier les systèmes quadratiques et démontrer que H2 = 4.
Étudier une sous-classe des systèmes planaires, par exemple les systèmesde Liénard.
De nombreux livres sont consacrés à l'étude des cycles limites. Parmi eux,celui de Yanqian [59].
L'équation de Liénard polynomiale s'écrit
x+ f(x)x+ g(x) = 0, (1)
où f(x) et g(x) sont des polynômes. Cette équation peut se transformer enun système de deux équations du premier ordre en posant dx/dt = z
x = z,
z = −g(x)− f(x)z.(2)
Le système (2) est équivalent au système (3), obtenu en posant z = y−F (x),
où F (x) =∫ x
0f(s)ds
x = y − F (x),
y = −g(x).(3)
où F (x) et g(x) sont deux polynômes de degré m et n respectivement. Cesystème est très intéressant pour étudier les cycles limites des systèmes pla-naires, notamment pour montrer l'existence et l'unicité des cycles limites. Onnote H(m,n) le nombre maximal de cycles limites qui peuvent exister si-multanément pour le système (3). L'histoire commence avec Liénard (1928),un ingénieur français qui établit un théorème d'existence et d'unicité d'unesolution périodique pour le système portant son nom.
Le théorème de Liénard, établit que si g(x) = x et F (x) est une fonctioncontinue et impaire qui a une unique racine positive en x = a et quiest strictement croissante pour x ≥ a, alors le système (3) possède ununique cycle limite.
Rychkov (1975), a prouvé que pour des polynômes F (x) impaires et dedegré 5 et si g(x) = x alors (3) a au plus 2 cycles limites.
Zhang (1981) a étendu le résultat de Rychkov (1975) à des fonctions nonpolynomiales : si g(x) = x; si F (x) et sa dérivée f(x) sont continues ; sif(x) est paire et a deux racines positives a1 < a2 telle que F (a1) > 0
et F (a2) < 0 et si f(x) est strictement croissante pour x > a2, alors lesystème (3) a au plus 2 cycles limites .
5

Introduction générale
Lins, De Melo et Pugh (1977)dans [32] ont prouvé que si m = 3 et n = 1
alors il y a au plus un cycle limite. Ils ont de plus donné les conditionspour que ce cycle existe. Enn ils ont conjecturé que si g(x) = x, il nepouvait y avoir plus de E(m−1
2) cycles limites 1. Mais cette conjecture a
été prouvée qu'elle est fausse pour n ≥ 6 voir [17].
Dumortier et Chengzhi (1997) dans [13] ont prouvé que H(2, 2) = 1.
Coppel (1998) dans [12] a prouvé que H(2, 1) = 1.
Wang et Jing (2002) dans [58] ont prouvé que H(3, 2) = 3.
Aujourd'hui, certains chercheurs établissent l'unicité d'un cycle limitesdans des classes de systèmes les plus larges possible (Coll, Gasull et Llibre,1989). D'autres chercheurs essayent de trouver des valeurs minimales deH(m,n) en ne considérant que des cycles limites de faible amplitude qui se-raient créés par bifurcation de Hopf autour d'un point d'équilibre. Il trouventainsi un nombre maximum H(m,n) de cycles limites locaux appelés cycleslimites de faible amplitude. Blows, Lloyd et Lynch dans [2], [41] et [42] ontprouvé que
Si g est impaire alors H(m,n) =[n2
].
si f est paire alors H(m,n) = n, quelque soit g.
Si f est impaire alors H(m, 2n+ 1) =[m−2
2
]+ n.
si g(x) = x+ ge(x), où ge est paire alors H(2m, 2) = 2.
Christopher et Lynch (1999)dans [11], [43], [44] et [45] ont montré que
H(m, 2) =[
2m+13
],
H(2, n) =[
2n+13
],
H(m, 3) = 2[
3m+28
]pour tout 1 < m ≤ 50.
H(4, k) = H(k, 4) pour k = 6, 7, 8, 9 et H(5, 6) = H(6, 5).
En 1998 Gasull et Torregrosa dans [18] ont amélioré certains résultats et ontobtenu des bornes supérieures pour H(7, 6), H(6, 5), H(7, 7) et H(4, 20).
En 2006 Yu et Han dans [60] ont prouvé que H(m,n) = H(n,m) pourn = 4,m = 10, 11, 12, 13;n = 5,m = 6, 7, 8, 9;n = 6,m = 5, 6.
Trouver la solution d'une équation diérentielle est bien plus compliqué quede résoudre le problème algébrique de trouver les racines d'un polynôme.Melnikov (1963) [47] et avant lui Pontrjagin (1934) transforment le problème
1. E(x) est la partie entière du réel x.
6

Introduction générale
de savoir combien de cycles limites (ou plus généralement de trajectoiresfermées) a un système d'équations diérentielles en un problème algébriquequi est de savoir combien de racines strictement positives a une certainefonction. Le problème 'diérentiel' est donc transformé en un problème detrouver les racines d'une fonction dénie par une intégrale. Dans certainscas, lorsque le système non perturbé est assez simple, cette fonction sera un
polynôme.L'étude des foyers ns (ne focus) grâce a une fonction de Liapunov V (x, y)
dont la dérivée temporelle s'exprimerait en fonction de la distance au foyer(V = η2r
2 + η4r4 + · · · ) est aussi un essai pour transformer le problème
initial en un problème algébrique (les coecients η2p sont des polynômesdépendants des paramètres du système d'équations diérentielles). Un autreoutil pour étudier les systèmes perturbés est la méthode de moyennisation.Cette méthode est l'une des méthodes classiques qui permet de rechercher descycles limites s'ils existent. Elle consiste à donner une relation quantitativeentre les solutions d'un certain système diérentiel périodique non autonomeet celles de son système diérentiel autonome moyenné.
Dans ce travail, on considère le problème de recherche des cycles limitespour un système diérentiel dont le second membre dépend d'un petit para-mètre ε. Une réponse à ce problème peut être donnée en utilisant la méthodede moyennisation. La moyennisation est par rapport à la variable indépen-dante et le second membre de ces systèmes est susamment petit, dépendantd'un petit paramètre ε. Plus précisément, on se propose d'étudier les cycleslimites de la classe d'équations polynomiales de Liénard généralisée
x+ f(x)x2p+1 + g(x) = 0, (4)
où premièrement, on considère
f(x) = εf(x) et g(x) = x+ εg(x),
où f, g sont des polynômes de degré m et n respectivement et ε est un petitparamètre ( voir chap.III). Cette équation est donc équivalente au systèmesuivant
x = y,
y = −x− ε(f(x)y2p+1 + g(x))(5)
On a trouvé la borne inférieure qui est [n2] du nombre de cycles limites H(m,n)
que peut avoir ce système.Deuxièmement, on considère
f(x) = εf1(x) + ε2f2(x) et g(x) = x+ εg1(x) + ε2g2(x),
7

Introduction générale
où fi, gi sont des polynômes de degré m et n respectivement pour i = 1, 2 etε est un petit paramètre. L'équation (4) devient
x = y,
y = −x− ε(f1(x)y2p+1 + g1(x))− ε2(f2(x)y2p+1 + g2(x))(6)
Une borne inférieure du nombre H(m,n) de ce système est donnée par
max[n2
], [n−12
] + [m2
]. L'équation étudiée par J. Llibre, A.C. Meureu et M.A.
Teixeira [35] est un cas particulier de notre équation (4) (le cas p = 0) .
Dans [34] J. Llibre et A. Makhlouf ont étudié, en utilisant la méthode demoyennisation, les solutions périodiques de l'équation diérentielle ordinaireautonome du quatrième ordre
....x + (1 + p2)x+ p2x = εF (x, x, x, x),
où p est un rationnel diérent de −1, 0, 1, ε est un petit paramètre réel, etF est une fonction non-linéaire autonome. En utilisant un autre résultat dela méthode de moyennisation, nous avons étudié les solutions périodiques dela même équation mais dans la cas non autonome c.à.d lorsque F dépendexplicitement du temps t. C'est l'objet du chapitre IV.
Le plan de cette thèse est le suivant. Un rappel sur les notions géné-rales des systèmes diérentiels est donné au chapitre I. Le chapitre IIintroduit l'algorithme de G/N qui permet d'avoir accès au nombre de cycleslimites du système de Liénard. Nous avons donné des exemples où cetalgorithme de G/N s'applique aussi à des fonctions non polynomiales. Dansle chapitre III nous utilisons la méthode de moyennisation du premier etsecond ordre pour chercher le nombre maximum de cycles limites du systèmede Liénard généralisé. Le chapitre IV contient une étude des solutions pério-diques d'une classe d'équations diérentielles non-autonomes du quatrièmeordre ainsi que quelques applications.Ces chapitres représentent des travaux publiés dans les revues suivantes :
Amel Boulfoul and Amar Makhlouf ,"The GN's method for somecases of Liénard systems", Proceeding of the rst days on dynamicalsystems and dierential equations , (2007).
Amel Boulfoul and Amar Makhlouf , "Limit cycles of the gene-ralized polynomial liénard dierential equation", Annals of DierentialEquations, P.127-131, Vol 28, Issue 2, (2012).
8

Introduction générale
Amel Boulfoul and Amar Makhlouf , "On the limit cycles for aclass of fourth-order dierential equations", International Journal of Dif-ferential Equations and Applications, P.135-144, Vol 11, No 3, (2012).
9

Chapitre I
Notions préliminaires
SommaireI.1 Systèmes dynamiques, points d'équilibre . . . . . 11
I.2 Classication des points d'équilibre . . . . . . . . 12
I.3 Portrait de phase et cycles limites . . . . . . . . . 13
I.4 Intégrabilité des systèmes diérentiels . . . . . . . 14
10

I.1. Systèmes dynamiques, points d'équilibre
Dans ce chapitre, nous rappelons quelques notions de base des systèmes dy-
namiques, points d'équilibre, portrait de phase, cycles limites et intégrabilité des
systèmes diérentiels.
I.1 Systèmes dynamiques, points d'équilibre
Dénition I.1. Un système dynamique sur Rn est une application :
U : R+ × Rn → Rn
dénie sur tout R+ × Rn, telle que :
• U (t, x) : R+ → Rn est continue.
• U (0, x) = x.
• U (t+ s, x) = U (t, U (s, x)) pour t, s ∈ R+, x ∈ Rn.
Exemple Soit le problème de Cauchy associé à une équation diérentielle˙x(t) = Ax(t)
x(0) = x0, t ∈ R+, x0 ∈ Rn(I.1.1)
où A est une matrice constante. La solution de (I.1.1) est :
x(t) = etAx0
Le système (I.1.1) engendre un système dynamique, car l'application :
U : R+ × Rn → Rn
qui à tout t ∈ R+, x ∈ Rn associe :
U(t, x) = etAx
vérie les quatre propriétés de la dénition I.1.
Dénition I.2. Soit le système non linéaire
x = f(x) (I.1.2)
On appelle point critique ou point d'équilibre du système (I.1.2), tout pointx0 ∈ Rn tel que :
f(x0) = 0
11

Chapitre I. Notions préliminaires
Dénition I.3. Considérons le système (I.1.2)Le système
x = Ax
où
A =
(∂fi∂xj
(x0)
)= Df(x0), 1 ≤ i, j ≤ n
et
f (x0) = 0
est appelé le linéarisé de (I.1.2) en x0.
Dénition I.4. On appelle point critique hyperbolique de (I.1.2), tout pointcritique x0 telle que toutes les valeurs propres de A sont à partie réelles nulles.
I.2 Classication des points d'équilibre
Cas des systèmes linéaires
Considérons le système linéaire :
x = Ax (I.2.1)
où x = (x1, ..., xn) et A une matrice constante inversible. Soient λ1, ..., λn lesvaleurs propres de A.
Dénition I.5.
Si les valeurs propres λ1, ..., λn sont réelles et du même signe, la solution
x = 0 est appelée noeud.
Si les valeurs propres λ1, ..., λn sont réelles, non nulles et de signe
diérent, la solution x = 0 est appelée selle.
Si les valeurs propres λ1, ..., λn sont complexes avec Im(λi) 6= 0,
i = 1, ..., n, La solution x = 0 est appelée foyer.
Si les valeurs propres λ1, ..., λn sont complexes avec Re(λi) = 0 et
Im(λi) 6= 0, i = 1, ..., n, La solution x = 0 est appelée centre.
12

I.3. Portrait de phase et cycles limites
Cas des systèmes non linéaires
Considérons maintenant le système non-linéaire autonôme (I.1.2) où x =
(x1, ..., xn), f = (f1, ..., fn).
Dénition I.6. Un point critique x0 de (I.1.2) est appelé puits si toutes les
valeurs propres de la matrice A = Df(x0) ont des parties réelles négatives ;
Il est appelé source si toutes les valeurs propres de la matrice A = Df(x0)
ont des parties réelles positives ; Il est appelé selle s'il est hyperbolique et si
A = Df(x0) a au moins une valeur propre avec une partie réelle positive et
au moins une valeur propre avec une partie réelle négative.
Dénition I.7. Deux systèmes autonômes dans le plan :
x = f(x) (I.2.2)
et
x = g(x) (I.2.3)
dénis sur deux ouverts U et V respectivement, sont topologiquement équi-
valents s'il existe un homéomorphisme h : U → V tel que h transforme les
orbites de (I.2.2) en celles de (I.2.3) et préserve le sens du mouvement.
Théorème I.1. Si x0 est un point d'équilibre hyperbolique de (I.1.2), alors ilexiste un voisinage de ce point dans lequel le système x = f(x) est topologi-
quement équivalent à son linéarisé x = Ax.
I.3 Portrait de phase et cycles limites
Dénition I.8. Soit le système diérentiel de la formex = P (x, y)
y = Q(x, y)(I.3.1)
où P et Q sont des polynômes en x et y à coecients réels de degré d.
Les solutions (x(t), y(t)) du système (I.3.1) représentent dans le plan (x, y)
des courbes appelées orbites.
Les points critiques de ce système sont des solutions constantes et la gure
complète des orbites de ce système ainsi que ces points critiques représentés
dans le plan (x, y) s'appelle portrait de phase, et le plan (x, y) est appelé plan
de phase.
13

Chapitre I. Notions préliminaires
Dénition I.9. Une solution périodique du système (I.3.1) est une solution
telle que :
∀t > 0, (x(t+ T ), y(t+ T )) = (x(t), y(t)) pour certain T > 0.
A toute solution périodique correspond une orbite fermée dans l'espace des
phases.
Dénition I.10. Un cycle limite du système (I.3.1) est une orbite fermée
isolée, c'est à dire qu'on ne peut pas trouver une autre orbite fermée dans son
voisinage.
Dénition I.11. Soit la gure I.1 : On a
Figure I.1 Cycle limite d'amplitudes a1, a2.
a1 = xmax − x0
et
a2 = x0 − xmin.
On dit que Γ est un cycle limites d'amplitudes a1, a2.
I.4 Intégrabilité des systèmes diérentiels
Soient U un ouvert du plan et (x(t), y(t)) une solution du système (I.3.1).On note
∆U(x,y) = t ∈ R |(x(t), y(t)) ∈ U .
Dénition I.12. L'application H : U −→ R est appelée intégrale première
du système sur U si elle est constante sur les courbes solutions (x(t), y(t)) du
système (I.3.1) contenue dans U , i.e si
H(x(t), y(t)) = cste, ∀t ∈ ∆Ux,y
14

I.4. Intégrabilité des systèmes diérentiels
Dénition I.13. On dit que le système diérentiel (I.3.1) est intégrable sur
un ouvert U du plan, s'il admet une intégrale première sur U .
Exemple
15

Chapitre II
Méthode de G/N
SommaireII.1 Présentation de l'algorithme de G/N . . . . . . . . 17
II.1.1 Algorithme appliqué sur le système de Van-der Pol 18
II.1.2 Lien entre les racines de Rn(x) et les trajectoirespériodiques . . . . . . . . . . . . . . . . . . . . . . 19
II.1.3 Quelques exemples . . . . . . . . . . . . . . . . . . 22
II.2 Méthodes de Melnikov et de relaxation . . . . . . 25
II.3 Amélioration de l'algorithme de G/N . . . . . . . 28
II.3.1 Comparaison entre Rn(x) et Rn(a) . . . . . . . . . 29
II.4 Exemples sur des fonctions non polynomiales . . 30
16

II.1. Présentation de l'algorithme de G/N
Dans ce chapitre, nous présentons la méthode de G/N (Giacomini et Neukirch
[48]) pour l'étude des cycles limites des systèmes de Liénard polynomiaux. Nous
présentons ensuite la méthode améliorée de G/N ainsi qu'une comparaison entre les
deux méthode. En termine par présenter une application de cette méthode sur des
systèmes non polynomiaux.
II.1 Présentation de l'algorithme de G/N
En fait, il faut préciser que ce chapitre reprend des parties essentielles deschapitres II et III de [48].Considérons le système
dx
dt= y − F (x),
dy
dt= −G(x)
(II.1.1)
où F (x) et G(x) sont des polynômes de degré m et n respectivement. Leproblème fondamental lié au système (II.1.1) est de déterminer le nombre desolutions périodiques isolées (i.e. cycles limites) qui peuvent exister simulta-nément. On note par H(m,n) ce nombre.On ne considèrera que les cas où F (x) et G(x) sont des polynômes impaires(donc F (0) = G(0) = 0).Trouver une intégrale première I pour un système est un travail compliqué etla présence de cette intégrale restreint énormément les comportements pos-sibles du système. Pour cette raison, les auteurs (Giacomini et Neukirch) onsessayé de trouver des fonctions ayant une propriété moins forte que I ≡ 0.
L'algorithme de G/N restreint la propriété I ≡ 0 en cherchant des fonctionsH(x, y) telles que H = f(x) pour le système (II.1.1).Pour se convaincre de la possibilité de trouver H(x, y) telle que H ≡ f(x), ilsut d' eectuer le calcul : Les auteurs proposent une fonction Hn(x, y) de laforme :
Hn(x, y) = gn,n(x)yn + gn−1,n(x)yn−1 + gn−2,n(x)yn−2 + · · ·+ g1,n(x)y+ g0,n(x)
(II.1.2)Grâce aux n + 1 fonctions gj,n ont fait en sorte que Hn ne soit fonction quede la variable x avec n un entier pair. Il est toujours possible de choisir lesfonctions gj,n(x) telles que
Hn(x, y) =d
dtHn(x, y) = (y − F (x))
∂Hn(x, y)
∂x−G(x)
∂Hn(x, y)
∂y(II.1.3)
soit une fonction de x seulement, alors on peut dénir :
Hn(x, y)déf= Rn(x)
17

Chapitre II. Méthode de G/N
Les fonctions gj,n(x) et Rn(x) déterminées de cette façon sont des polynômes.Ces polynômes donnent des d'informations sur l'endroit et le nombre de cycleslimites du système (II.1.1). Prenons ici un exemple :
II.1.1 Algorithme appliqué sur le système de Van-der
Pol
Considérons
F (x) = ε(x3
3− x), G(x) = x (II.1.4)
Alors le système (II.1.1) devientx = y − ε(x3
3− x),
y = −x(II.1.5)
Calculons la forme de
H4(x, y) = g4,4(x)y4 + g3,4(x)y3 + y2g2,4(x) + g1,4(x)y + g0,4(x) (II.1.6)
H4(x, y) = (y − F (x))∂H4
∂x− x∂H4
∂y(II.1.7)
H4(x, y) =g′4,4(x)y5 +(g′3,4(x)− F (x)g′4,4(x)
)y4
+(g′2,4(x)− F (x)g′3,4(x)− 4xg4,4(x)
)y3
+(g′1,4(x)− F (x)g′2,4(x)− 3xg3,4(x)
)y2
+(g′0,4(x)− F (x)g′1,4(x)− 2xg2,4(x)
)y
− F (x)g′0,4(x)− xg1,4(x).
Donc pour éliminer le terme en y5, on pose g4,4(x) = c4,4 = 1. Le terme en y4
devient :H4(x, y) = g′3,4(x)y4 + · · · (II.1.8)
que l'on élimine en posant g3,4(x) = c3,4 = 0. Le terme y3 devient :
H4(x, y) =(−g′2,4(x) + 4x
)y3 + · · · (II.1.9)
que l'on élimine en posant g2,4(x) = 2x2 + c2,4 = 2x2. Le terme y2 devient :
H4(x, y) =
(−4εx(−x+
x3
3) + g′1,4(x)
)y2 + · · · (II.1.10)
que l'on élimine en posant g1,4(x) = −4
3εx3 +
4
15εx5c1,4 = 2x2 (on choisit
c1,4 = 0). Le terme en y est alors :
18

II.1. Présentation de l'algorithme de G/N
H4(x, y) =
(−4x3 − 4ε2x3 +
8
3ε2x5 − 4
9ε2x7 + g′0,4(x)
)y + · · · (II.1.11)
que l'on élimine en posant g0,4(x) = (1+ ε2)x4− 4
9ε2x6 +
1
18ε2x8c0,4 (on choisit
c0,4 = 0). Ainsi il n'y a plus de terme en y dans H4 :
H4(x, y) =16
3εx4 + 4ε3x4 − 8
5εx6 − 4ε3x6 +
4
3ε3x8 4
27ε3x10
= R4(x)
La forme explicite de H4(x, y) est :
H4(x, y) = (1+ ε2)x4− 4
9ε2x6 + ε2
x8
18− (
4
3εx3− 4
15εx5)y+2x2y2 +y4 (II.1.12)
On noteRn(x)
déf= Hn(x, y).
Ce calcul s'automatise facilement et ne prend que quelques secondes à l'ordi-nateur (voir Annexe).Pour n = 2, on trouve que
H2(x, y) =− 2G(x)F (x) = −2εx2(x2
3− 1)
= R2(x).
etH2(x, y) = y2 + x2 + k
On voit que si les fonctions G(x) et F (x) sont impaires, alors le polynômeR2(x) sera pair. Chaque polynôme Rn(x) a une racine d'ordre n en x = 0. Onnote xi,n les racines strictement positives de Rn. Leurs symétriques strictementnégatives seront notées x−i,n (avec la propriété x−i,n = −xi,n puisque Rn estpair). On remarque aussi que R2(x) a une seule racine positive de multiplicitéimpaire (i.e x1,2 =
√3).
II.1.2 Lien entre les racines de Rn(x) et les trajectoires
périodiques
Une autre façon de voir que chaque cycle doit englober au moins la pre-mière bande x−1,n ≤ x ≤ x1,n est d'intégrer l'égalité Rn = Hn le long d'un
19

Chapitre II. Méthode de G/N
-2 -1 1 2
-2
-1
1
Figure II.1 Tracer de R4(x) de l'équation (II.1.5).
-2 -1 0 1 2
-4
-2
0
2
4
Figure II.2 Les courbes fermées sont les courbes H4(x, y) = K et les droites verticales
sont les droites x1,4 et x2,4.
cycle limite :∫ T
0
Rn(x(t))dt =
∫ T
0
Hn (x(t), y(t)) dt
= Hn (x(T ), y(T ))−Hn (x(0), y(0))
= 0
où T est la période du cycle limite. Par conséquent, le long de tout cyclelimite : ∫ T
0
Rn(x(t))dt = 0.
20

II.1. Présentation de l'algorithme de G/N
Il faut donc que Rn(x) change de signe au moins une fois le long de chaquecycle. On voit donc que si un seul des polynômes Rn(x) ne change pas designe (c'est à dire n'a aucune racine réelle de multiplicité impaire) alors lesystème (II.1.1) n'a pas de cycle limite.De plus, chaque racine x1,n (à chaque ordre) est une borne inférieure de l'am-plitude du plus petit cycle du système (II.1.1).Considérons le système (II.1.5) avec ε = 2.x = y − 2(
x3
3− x),
y = −x(II.1.13)
Le théorème de Liénard montre que ce système possède un seul cycle limite(dont l'amplitude varie avec ε).L'application de l'algorithme montre que pour tout les rangs calculés (jusqu'àn = 120), il n'y a qu'une seule racine réelle strictement positive. On voit dansle tableau que les racines x1,n sont toutes inférieures à l'amplitude du cyclelimite qui est calculé numériquement par la méthode de Runge-Kutta.
n 2 6 10 14 18 70 102 120 xΓ
x1,n 1.732 1.866 1.912 1.936 1.951 1.999 2.009 2.011 2.019
Table II.1 Valeurs des racines de Rn(x) pour le système (II.1.13).
De plus, et c'est le résultat important il semble que :
x1,n −→ xΓ quand n −→ +∞
donc chaque xi,n est une borne inférieure au cycle limite. La question estcomment trouver K∗n tel que Hn(x, y) = K∗n soit la dernière courbe qui soitcomplètement contenue dans la bande x−1,n ≤ x ≤ x1,n? Cette courbe esttangente à la droite x = x1,n, on cherche donc y et K tels que :
Hn(x1,n, y) = K,
∂Hn
∂y(x1,n, y) = 0.
(II.1.14)
On note y1,n etK∗1,n les solutions de ce système de deux équations à deux incon-nus qui se résout numériquement à l'ordinateur. Le tableau suivant contientles valeurs trouvées pour le système (II.1.5) avec ε = 2.
Mais comme on l'a vu plus haut, la borne en x n'est pas la seule borne infé-rieure au premier cycle limite qui nous est fournie par les polynômes Hn(x, y).
21

Chapitre II. Méthode de G/N
n 2 6 10 12 14 16 18 20y1,n 0 0.60 0.83 0.91 0.96 1.01 1.05 1.08K∗n 3 96.02 3.92 103 2.58 104 1.71 105 1.14 106 7.68 106 5.18 107
Table II.2 Valeurs des K∗n(x) pour le système (II.1.13).
Ce qui donne aussi une borne inférieure au y maximum sur ce cycle (que l'onnote yΓ). Les cycles limites du système (II.1.1) ont leurs y maximal en x = 0
(puisque G(0) = 0) et d'autre part, les courbes Hn(x, y) ont leur y maximum(que l'on note ymax,n) en x = 0. Pour connaître ce ymax,n, il sut de fairex = 0 dans Hn(x, y) :
Hn(x = 0, ymax,n) = K∗n
doncynmax,n = K∗n
n 2 4 6 8 10 12 18 20 yΓ
ymax,n
√3 1.99 2.13 2.22 2.28 2.33 2.41 2.43 2.61
Table II.3 Valeurs de ymax,n = (K∗n)
1n pour le système (II.1.13). Les valeurs semblent
s'approcher de la valeur numérique yΓ.
II.1.3 Quelques exemples
• Prenons par exemple le système suivantx = y − (0.8x− 4
3x3 + 8
25x5),
y = −x(II.1.15)
Ce système d'après le théorème de Rychkov admet deux cycles limites.On peut vérier par intégration numérique que le système (II.1.15) a deuxcycles limites. Les Polynômes Rn(x) ont exactement deux racines positives demultiplicité 1 (jusqu'à l'ordre 14) comme il est montré dans le tableau II.4.
22

II.1. Présentation de l'algorithme de G/N
n x1,n K∗1 x2,n K∗22 0.852 0.726 1.854 3.4394 0.905 0.711 1.885 14.4976 0.930 0.739 1.905 67.5968 0.945 0.784 1.920 334.22410 0.955 0.840 1.930 1712.3812 0.962 0.903 1.938 8973.1614 0.967 0.974 1.944 47500.6xΓ 1.003 . 1.999 .
Table II.4 Les deux racines positives des polynômes Rn(x) qui correspondent aux
deux cycles limites du système (II.1.15) dont leurs amplitudes xΓ et xΓ sont calculées
numériquement.
• Considérons le système :x = y − ε( 32
875x7 − 56
125x5 +
98
75x3 − 18
25x),
y = −x(II.1.16)
Ce système a été étudié par Perko (pour 0 < ε << 1). L'intégration numériquemontre qu'il a trois cycles limites et l'application de l'algorithme pour ε = 1
donne le tableau II.5.Tous les polynômes Rn(x) calculés pour ce système ont trois racines stricte-ment positives de multiplicité 1.
-2 -1 1 2
-2
-1
1
2
Figure II.3 Les deux cycles limites du système (II.1.15) en trait continu et leurs
approximations algébriques en pointillé H14(x, y) = K∗1,14 et H14(x, y) = K∗
2,14.
23

Chapitre II. Méthode de G/N
n x1,n K∗1 x2,n K∗2 x3, n K∗32 0.846 0.716 1.832 3.359 2.858 8.1734 0.902 0.692 1.869 13.008 2.878 103.116 0.929 0.708 1.894 53.894 2.895 165.138 0.944 0.737 1.912 231.816 2.909 29818.910 0.954 0.767 1.924 1015.01 2.919 57500430 0.969 0.980 1.930 11.568 2.156 430.191110 1.000 . 1.989 . 2.956 .xΓ 1.0029 . 2.0032 . 2.9810 .
Table II.5 Les trois racines positives des polynômes Rn(x) du système (II.1.16) avec
ε = 1.
Cela s'accorde avec le fait que ce système à trois cycles limites de multipli-cité 1. On peut remarquer dans cet exemple que, bien que la première racinene fasse que croître avec n et il n'en est pas de même pour x2,n et x3,n car x2,n
croît vers x2,Γ puis, à partir de (n = 30) décroit mais, il commence à partird'un certain rang (n = 110) par croître vers x2,Γ (même chose pour x3,n).
-3 -2 -1 1 2 3
-4
-2
2
4
Figure II.4 Les trois cycles limites du système (II.1.16) avec leurs approximations
algébriques H8(x, y) = K∗j,8 avec j = 1, 2, 3 et ε = 1.
24

II.2. Méthodes de Melnikov et de relaxation
II.2 Méthodes de Melnikov et de relaxation
• Méthode de Melnikov
La méthode de Melnikov (1963) est dans la lignée des méthodes perturbatives.Elle permet d'étudier les perturbations des orbites homoclines des systèmesdynamiques de la forme
x = F(x) + εG(x, t, µ), où 0 < ε << 1, x ∈ R2n avec µ ∈ Rm, (II.2.1)
où F(x) est le champ de vecteur déduit du hamiltonien H(x). La méthode deMelnikov peut être aussi utiliser pour établir l'existence des cycles limites dessystèmes planaires perturbés (II.2.1) avec x ∈ R2. c'est à dire les systèmes dela formes
x = f(x) + εg(x, t, µ), (II.2.2)
où 0 < ε << 1, x ∈ R2 et µ est un paramètre réel. f ∈ C1(R2) etg ∈ C1(R2 × R× R), périodique en t de période T.
Supposons que :
(A.1) Pour ε = 0, le système (II.2.2) a une orbite homocline
Γ0 : x = γ0(t), −∞ < t < +∞
au point d'équilibre hyperbolique x0.
(A.2) Pour ε = 0, le système (II.2.2) possède une famille à un paramètre d'or-bites périodiques γα de période Tα à l'intérieur de Γ0 avec ∂γα(0)/∂α 6=0; Voir gure ci-dessous.
Figure II.5 portrait de phase du système (II.2.2) sous les conditions (A.1) et (A.2).
Dénition II.1. voir [50]
25

Chapitre II. Méthode de G/N
La fonction de Melnikov du système (II.2.2) est dénie par :
M(t0, µ) =
∫ ∞−∞
exp
(−∫ t
t0
∇.f(γ0(s))ds
)f(γ0(t) ∧ g(γ0(t), t+ t0, µ)dt
De plus si pour ε = 0, (II.2.2) est un système hamiltonien c.à.d f =
(∂H∂y,−∂H
∂x)T , alors ∇.f = 0. La fonction de Melnikov dans ce cas s'écrit
M(α, µ) =
∫ Tα
0
f(γα(t) ∧ g(γα(t), t, µ)dt
où u ∧ v = u1u2 − v1v2 avec u, v ∈ R2 et u =
(u1
u2
), v =
(v1
v2
).
Application de la méthode de Melnikov aux systèmes de Lié-
nard Nous allons considérer un cas où la perturbation est indépendante du
temps : g(x, t) = g(x) et f(x) =
(y
−x
). Si on choisit g(x) =
(F (x)
0,
)le
système (II.2.2) devient :(x
y
)=
(y
−x
)+ ε
(F (x)
0
)(II.2.3)
On reconnait ici le système de Liénard. Pour ε = 0, on a des trajectoirespériodiques de type centre.La perturbation introduite transforme le centre du système linéaire en unfoyer et transforme occasionnellement certaines trajectoires périodiques ducentre en cycles limites ; la méthode de Melnikov permet de savoir quellessont ces trajectoires.
Pour le système de Liénard (II.2.3), on a une bifurcation du centre f(x) =(y
−x
), par conséquent ∇f = 0. La fonction de Melnikov est alors :
M(α) =
∫ Tα
0
f(x) ∧ g(x)|x=γα(t)
=− α∫ 2π
0
cos(t)F (α cos(t))dt.
Le système non perturbé (II.2.3) possède une famille à un paramètre d'or-bites périodiques :
Γα : γα(t) = (α cos t, α sin t), α > 0 et Tα = 2π
26

II.2. Méthodes de Melnikov et de relaxation
Le système de Liénard perturbé pour F (x) de degré impair et contenant toutesles puissance de x, s'écrit :
x = y − ε(a1x1 + a2x
2 + a3x3 + · · ·+ a2n+1x
2n+1)
y = x(II.2.4)
En posant µ = (a1, · · · , a2n+1), (II.2.4) prend la forme du système (II.2.2). Lafonction de Melnikov pour ce système est :
M(α, µ) = −∫ 2π
0
(a1x(t)1 + a2x(t)2 + a3x(t)3 + · · ·+ a2n+1x(t)2n+1
)x(t)dt
Les termes impairs sont nuls. De plus,∫ 2π
0
cos(t)2n+2dt =
(2n+ 2
n+ 1
)a2n+1π
22n+1
d'où, on obtient :
M(α, µ) = −2πα2
(a1
2+
3
8aα2 + · · ·+
(2n+ 2
n+ 1
)a2n+1
22n+2α2n
)(II.2.5)
En se basant sur la formule (II.2.5), Perko et Blows, ont montré cette propo-sition.
Proposition II.1. Le système (II.2.4), pour ε susamment petit, possède
au plus n cycles limites. Il possède exactement n cycles limites hyperboliques
asymptotiques aux cercles de rayon rj, j = 1, ....., n, quand ε → 0 si et seule-
ment si le polynôme de degré n en r2.
P (r2, n) =a1
2+
3
8a3 + · · ·+
(2n+ 2
n+ 1
)a2n+1
2(2n+2)α2n
possède n racines positives α2 = α2j , j = 1, · · · , n.
Ce résultat nous permet de construire des systèmes de Liénard avec lenombre exact de cycles limites avec des rayons que nous souhaitons. On écrit lepolynôme avec les racines choisies et on trouve les coecients aj du polynômeP (r2, n). Le polynôme P (r2, n) s'appelle polynôme de Melnikov, il est lié à lafonction de Melnikov par la relation suivante :
P (r2, n) = − 1
2πM(r, µ)
Prenons par exemple la perturbation F =x3
3− x. Alors a1 = −1, a3 =
1
3.
Dans ce cas, P (r2, 1) possède une seule racine positive r = 2 et donc il y a unseul cycle limite de rayon r = 2 comme il est montré dans la gure II.6.
27

Chapitre II. Méthode de G/N
-2 -1 1 2
-2
-1
1
2
Figure II.6 Cycle limite de (II.1.5) avec ε = 0.1
• Méthode de relaxation
Pour les grande valeurs de ε, le système (II.1.1) avec G(x) = x modélise unsystème de relaxation (Levi, 1981). Les cycles limites ont alors une formespéciale qui épouse les formes de la courbe y = F (x) voir gure II.7 quandε→∞, chaque cycle englobe un extremum de F (x). On peut ainsi connaitre
-2 -1 1 2
-6000
-4000
-2000
2000
4000
6000
Figure II.7 Cycle limite de (II.1.5) avec ε→∞.
de façon exacte les valeurs maximales en x(i.exΓ) et en y(i.eyΓ) du cycle limite.Pour l'exemple de la gure II.7, les extremum de F (x) sont en x = ±1 doncyΓ = F (1) = 2
3. xΓ est l'autre racine de l'équation F (x) = 2
3c'est à dire
xΓ = 2.
II.3 Amélioration de l'algorithme de G/N
Notons par
Rn(a)déf=
∫ 2π
0
Rn(x = a cos(t))dt (II.3.1)
28

II.3. Amélioration de l'algorithme de G/N
Si on utilise la formule∫ 2π
0
cos2(j+1)(t)dt =
(2(j + 1)
j + 1
)2π
22(j+1),
on voit que Rn(a) peut se calculer facilement :
Rn(a) = 2πRn(xj −→ ajcj)
où
cj =2(j + 1)!
4j+1(j + 1)!(j + 1)!
D'autre part, on voit facilement que chaque polynôme Rn(a) a la structuresuivante :
Rn(a, ε) = −εnan−2M(a) + ε3Rn,3(a) + · · ·+ εn−1Rn,n−1(a) (II.3.2)
On remarque qu'il n'y a que des termes de puissance impaires en ε dansla formule précédente et que le premier terme en ε de chaque polynôme Rn
correspond à la fonction de Melnikov. Cela donne une preuve que lorsqueε → 0 le nombre, la multiplicité et le lieu des racines positives de Rn(a) estdirectement relié au nombre, à la multiplicité et à l'étendu de chaque cyclelimite du système (II.2.3).
II.3.1 Comparaison entre Rn(x) et Rn(a)
Nous allons comparer les résultats donnés par les polynômes moyennésRn(a) (trouver par la méthode améliorée) avec les anciens polynômes Rn(x)
(méthode classique) .
• Considérons le système de bien connu :x = y − ε(x3
3− x)
y = −x(II.3.3)
On vérie par intégration numérique que, pour ε = 2 l'amplitude du cyclelimite vaut xΓ = 2.019. La méthode améliorée de l'algorithme montre que lesracines an des polynômes Rn(a) sont à chaque ordre supérieurs aux racines xndes polynômes Rn(x).
On remarque dans le tableau II.6 que les racines an fournissent demeilleures approximations de l'amplitude xΓ que les racines xn. Comme pourles polynômes Rn(x), les polynômes Rn(a) calculés pour ce système n'ont
29

Chapitre II. Méthode de G/N
n 2 6 8 10 12 14 18 20 xΓ
xn 1.732 1.866 1.894 1.912 1.926 1.936 1.951 1.999 2.019
an 2 2.003 2.005 2.007 2.009 2.010 2.0124 2.0127 .
Table II.6 Valeurs des racines xn des polynômes Rn(x) et des racines an des polynômes
Rn(a) pour le système (II.3.3) avec ε = 2. Ces valeurs tendent vers l'amplitude du cycle
limite de (II.3.3).
qu'une seule racine strictement positive (à tous les rangs calculés).On voit donc que si l'on considère des polynômes moyennés Rn(a), on obtientune convergence beaucoup plus rapide qu'avec les polynômes classiques Rn(x).La valeur xΓ de l'amplitude est supérieure à 2 et on voit que les racines ansont toutes supérieures ou égales à 2, alors qu'il faut atteindre l'ordre n = 72
pour que la racine de Rn(x) dépasse 2 (x72 = 2.0002).
II.4 Exemples sur des fonctions non polyno-
miales
Exemple 1
Considérons l'équation suivante
x+ ε(|x| − 1)x+ x = 0,
qui est équivalente au système suivantx = y − ε(−x+1
2x|x|)
y = −x.(II.4.1)
Le théorème de Liénard montre que pour tout ε > 0, le système (II.4.1)possède une seule solution périodique.
• Pour 0 < ε << 1, en utilisant la méthode de Melnikov au système (II.4.1).On voit que la fonction de Melnikov
M(r) = −1
3r2(3π − 4r)
a une seule racine positive r = 3π4' 2, 3561. Cette racine corresponde au
rayon du cycle limite de (II.4.1). Le même résultat peut être obtenu par laméthode de G/N.
30

II.4. Exemples sur des fonctions non polynomiales
n 2 4 6 8 10 20 xΓ
a1,n 2.3561 2.3561 2.3561 2.3561 2.3561 2.3561 3π4
Table II.7 Racines des Rn(a) pour le système (II.4.1) (ε = 0.001).
Les polynômes moyennés Rn calculés pour ce système (0 < ε << 1) n'ontqu'une seule racine strictement positive (du moins à tous les rangs calculés).La présence d'une seule racine positive, nous donne l'existence d'un seul cyclelimite comme elle le montre la gure II.7.
-2 -1 1 2
-2
-1
1
2
Figure II.8 Cycle limite du système (II.4.1) avec ε = 0.001.
• Dans le cas où ε n'est ni petit ni grand, la méthode de G/N montre queles polynômes Rn(a) calculés jusqu'à l'ordre 20 en toujours une seule racinepositive.
n 2 4 6 8 10 20 xΓ
an 2.3561 2.3652 2.3717 2.3760 2.3891 2.3858 2.3944
Table II.8 Valeurs des racines an des Rn(a) pour le système (II.4.1) (ε = 3). xΓ valeur
de l'amplitude du cycle limite calculé numériquement.
• Pour des grandes valeurs de ε (ε → +∞), la méthode de relaxationmontre que la seule racine positive de l'équation F (x) = F (−1) est la valeurde l'amplitude xΓ = 1 +
√2 ' 2.414 du cycle limite de (II.4.1)
Un même résultat peut être obtenu par la méthode de G/N comme il le montrele tableau II.9
31
Chapitre II. Méthode de G/N
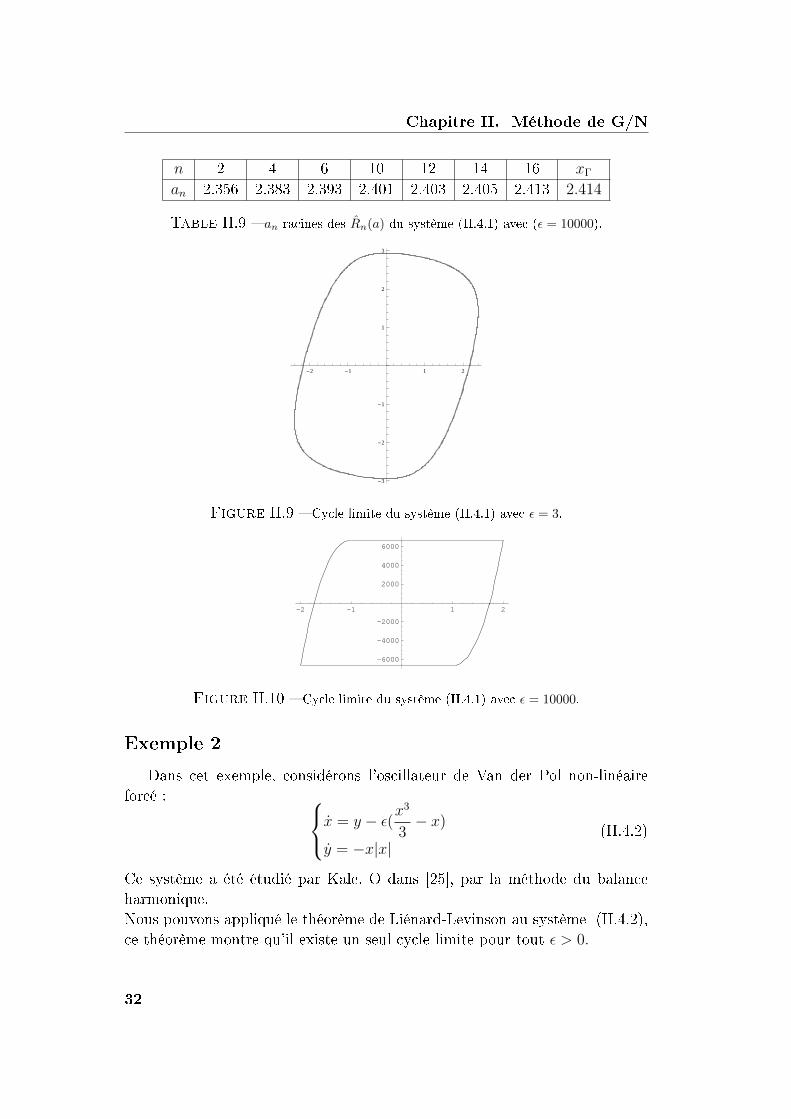
n 2 4 6 10 12 14 16 xΓ
an 2.356 2.383 2.393 2.401 2.403 2.405 2.413 2.414
Table II.9 an racines des Rn(a) du système (II.4.1) avec (ε = 10000).
-2 -1 1 2
-3
-2
-1
1
2
3
Figure II.9 Cycle limite du système (II.4.1) avec ε = 3.
-2 -1 1 2
-6000
-4000
-2000
2000
4000
6000
Figure II.10 Cycle limite du système (II.4.1) avec ε = 10000.
Exemple 2
Dans cet exemple, considérons l'oscillateur de Van der Pol non-linéaireforcé : x = y − ε(x
3
3− x)
y = −x|x|(II.4.2)
Ce système a été étudié par Kale. O dans [25], par la méthode du balanceharmonique.Nous pouvons appliqué le théorème de Liénard-Levinson au système (II.4.2),ce théorème montre qu'il existe un seul cycle limite pour tout ε > 0.
32

II.4. Exemples sur des fonctions non polynomiales
• Dans le premier cas, prenons ε petit (ε = 0.001). En calculant lesracines an des polynômes moyennées, on obtient une seule racine strictementpositive (du moins à tous les rangs calculés) qui converge vers la valeur del'amplitude de ce cycle limite (voir tableau II.10).
n 2 4 6 8 10 20 30 50 xΓ
an 1.732 1.816 1.853 1.873 1.886 9.914 1.924 1.933 2.
Table II.10 an racines des Rn(a) pour le système (II.3.3) avec (ε = 0.001).
-2 -1 1 2
-2
-1
1
2
Figure II.11 Cycle limite du système (II.3.3) avec ε = 0.001.
• Considérons maintenant une valeur intermédiaire de ε. La méthode deG/N montre que les polynômes Rn(a) ont tous une seule racine positive demultiplicité impaire. Pour ε = 2, les racines an des polynômes Rn(a) tendentvers la valeur de l'amplitude du cycle limite du système (II.3.3) calculée nu-mériquement (voir tableau II.11 et gure II.12).
n 2 8 12 18 20 30 40 56 xΓ
an 1.732 1.875 1.900 1.920 1.924 1.937 9.944 1.952 1.968
Table II.11 an racines des Rn(a) pour le système (II.3.3) avec (ε = 2).
• Dans le cas où ε est très grand (ε = 2000 par exemple). Les polynômesRn(a) ont toujours une seule racine positive comme le montre le tableau II.12
33

Chapitre II. Méthode de G/N
-2 -1 1 2
-2
-1
1
2
Figure II.12 Cycle limite du système (II.3.3) avec ε = 2 en trait continu et l'approxi-
mation H20 = K∗20 en pointillé.
n 2 4 6 8 10 20 32 xΓ
an 1.732 1.734 1.749 1.769 1.789 1.859 1.903 2.
Table II.12 an racines des Rn(a) pour le système (II.3.3) avec (ε = 2000).
Exemple 3
Dans cet exemple, considérons l'équation suivante :
x+ ε(x2 − 1)x+ sgn(x) = 0, (II.4.3)
qui s'écrit sous la forme du système diérentiel suivantx = y − ε(x3
3− x)
y = −sgn(x)(II.4.4)
Le théorème de Liénard-Levinson montre que l'équation (II.4.4) a une seulesolution périodique pour tout ε > 0.
• Si 0 < ε << 1, la méthode de balance harmonique peut estimer la valeurde l'amplitude du cycle limite de ce système xΓ ' 35
2√
2' 2.0916.
Les polynômes Rn(a) du système (II.4.4) ont tous une seule racine positivede multiplicité impaire pour n entre 2 et 30. Voir tableau II.13.
34

II.4. Exemples sur des fonctions non polynomiales
n 2 6 12 14 16 18 20 30 xΓ
an 1.732 1.880 1.960 1.975 1.986 1.996 2.004 2.030 2.0916
Table II.13 an racines des Rn(a) du système (II.4.4) convergeant vers la valeur de
l'amplitude xΓ avec (ε = 0.005).
-2 -1 1 2
-2
-1
1
2
Figure II.13 Cycle limite du système (II.4.4) avec ε = 0.005.
• Pour les valeurs de ε qui ne sont pas susamment petites (par exempleε = 1, le tableau ci-dessous montre les racines des polynômes Rn ont une seuleracine positive qui tend vers la valeur de l'amplitude. Une approximationalgébrique à l'ordre 30 de l'équation de ce cycle limite est montrée dans lagure II.14.
n 2 4 6 8 10 20 30 60 xΓ
an 1.732 1.824 1.878 1.913 1.937 1.998 2.024 2.053 2.089
Table II.14 an racines des Rn(a) pour le système (II.4.3) avec (ε = 1).
• Finalement, pour ε très grand (ε = 100), les polynômes Rn ont une seuleracine positive comme le montre le tableau II.15.
n 2 4 6 8 10 20 30 34 xΓ
xn 1.732 1.751 1.784 1.813 1.836 1.899 1.927 1.932 2.001
Table II.15 xn racines des Rn(x) pour le système (II.4.3) avec (ε = 100).
35

Chapitre II. Méthode de G/N
-2 -1 1 2
-2
-1
1
2
Figure II.14 Cycle limite du système (II.4.3) avec ε = 1 en trait continu et l'approxi-
mation H30 = K∗30 en pointillé.
36
Chapitre III
Cycles limites des systèmes
polynomiaux de Liénard
généralisés
SommaireIII.1 Théorie de moyennisation . . . . . . . . . . . . . . 38
III.1.1 Méthode de moyennisation du premier ordre . . . 40
III.1.2 Méthode de moyennisation du second ordre . . . . 42
III.2 Nombre maximum de cycles limites par la mé-
thode de moyennisation . . . . . . . . . . . . . . . . 44
III.2.1 Théorème III.4 . . . . . . . . . . . . . . . . . . . . 46
III.3 Démonstration du théorème III.4 . . . . . . . . . . 46
III.3.1 Démonstration de la partie (a) du théorème III.4 . 46
III.3.2 Démonstration de la partie (b) du théorème III.4 . 48
37

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
Nous rappelons dans ce chapitre la théorie de moyennisation du premier et se-
cond ordre. En appliquant cette méthode sur une classe d'équations diérentielles
ordinaires polynomiales de Liénard, nous donnons une bonne inférieure au nombre
de cycles limite H(m,n) que peut avoir cette classe d'équations.
III.1 Théorie de moyennisation
On s'intéresse toujours au même problème qui est la recherche dessolutions périodiques d'un certain système diérentiel.En 2004, Buicá et Llibre [8] ont introduit des méthodes topologiques pourdémontrer que ce problème est en fait équivalent à celui de rechercher leszéros d'une certaine fonction reliée directement au système considéré.En fait, ils ont remplacé le théorème des fonctions implicites par la théorie dudegré de Brouwer [40]. Avec cette nouvelle approche, ils ont réussi à aaiblirles hypothèses du théorème analogue concernant la moyennisation d'ordre un(voir p.158 de [57]) et concernant la moyennisation d'ordre deux (voir [33]).Ils ont donné aussi pour la première fois un résultat sur la moyennisationd'ordre plus élevé.
Donnons d'abord quelques notions sur le degré de Brouwer.
Dénition III.1. Soit D un ouvert de Rn et soit g ∈ C1(D), V un ouvert de
Rn tel que V ⊂ D et Zg = z ∈ V : g(z) = 0 . Supposons aussi Jg(z) 6= 0,
pour tout z ∈ Zg, alors le degré de Brouwer de la fonction g par rapport à
l'ensemble V et le point 0, noté dB(g, V, 0) est déni par
dB(V, 0) =∑z∈Zg
(Jg(z)).
Lemme III.1. On considère les fonctions continues :
fi : V −→ Rn, pour i = 0, · · · , k
et
f, g, τ : V × [−ε0, ε0]→ Rn,
données par
g(., ε) = f0(.) + εf1(.) + ε2f2(.) + · · ·+ εkfk(.). (III.1.1)
f(., ε) = g(., ε) + εk+1τ(., ε). (III.1.2)
38

III.1. Théorie de moyennisation
Supposons que
g(z, ε) 6= 0, ∀z ∈ ∂V, ε ∈ [−ε0, ε0]\0.
Alors, pour ε > 0 susamment petit, dB(f(., ε), V, 0) est bien déni et de plus
dB (f(., ε), V, 0) = dB (g(., ε), V, 0) .
Démonstration. Voir [40].
Remarque. Soit g : D → Rn une fonction de classe C1, avec g(a) = 0,
où D est un ouvert de Rn et a ∈ D. Si Jg(a) 6= 0, il existe un voisinage V dea tel que g(z) 6= 0 pour tout z ∈ V \a alors dB(g, V, 0) ∈ −1, 1Justions maintenant le fait que le problème de chercher des solutions
périodiques pour un certain système diérentiel est équivalent à celui dechercher les zéros d'une certaine fonction reliée à ce système.
Considérons le système diérentiel
x(t) =dx
dt= F (t, x, ε) (III.1.3)
où F : R ×D × ]−εf , εf [ → Rn est une fonction continue T-périodique en lapremière variable et localement lipschitzienne en la deuxième variable. D estun ouvert de Rn,
Pour tout z ∈ D, on désigne par
x(., z, ε) : [0, tz[→ Rn,
la solution de (III.1.3) tel que x(0, z, ε) = z, avec tz > T pour tout z ∈ D.On considère maintenant la fonction f : D × ]−εfεf [→ Rn dénie par
f(z, ε) =
∫ T
0
F (t, x(t, z, ε), ε) dt. (III.1.4)
Toute solution x : [0, T ]→ Rn de l'équation (III.1.3) avec x(0) = x(T ) admetun prolongement sur R. On obtient alors la relation suivante
x(T, z, ε)− x(0, z, ε) = f(z, ε) (III.1.5)
Donc, tout (zε, ε) pour lequel
f(zε, ε) = 0 (III.1.6)
produit une solution périodique x(., zε, ε) pour le système (III.1.3).La réciproque est aussi vraie, i.e. pour toute solution T-périodique de (III.1.3),
39

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
si on désigne par zε sa valeur pour t = 0, alors (III.1.6) est satisfaite.Donc, le problème de chercher une solution T-périodique de (III.1.3), peutêtre remplacer par celui de chercher des zéros de la fonction f(., ε) donnéepar (III.1.4). La propriété la plus importante du degré de Brouwer est que sidB (f(., ε), V, 0) 6= 0, alors l'équation
f(z, ε) = 0 (III.1.7)
admet une solution dans V, où V est un ouvert de Rn, V ⊂ D et 0 n'appartientpas à f(∂V, ε) pour un certain ε.
III.1.1 Méthode de moyennisation du premier ordre
Théorème III.1. On considère le système suivant :
x(t) =dx
dt= εF1(t, x) + ε2R(t, x, ε), (III.1.8)
où F1 : R×D → Rn, R : R×D× ]−εf , εf [→ Rn sont des fonctions continues,
T-périodiques en la première variable et D un ouvert de Rn.
On dénit F10 : D → Rn comme suit
F10(z) =1
T
∫ T
0
F1(s, z)ds, (III.1.9)
supposons que
(i) F1 et R sont localement lipschitziennes par rapport à x;
(ii) Pour a ∈ D tel que F10(a) = 0, il existe un voisinage V de a tel que
F10(z) 6= 0 pour tout z ∈ V \a et dB(F10, V, 0) 6= 0.
Alors, pour |ε| > 0 susamment petit, il existe une solution ϕ(., ε) du sys-
tème (III.1.8) T-périodique isolée telle que ϕ(., ε)→ a quand ε→ 0.
Les hypothèses de ce théorème sont plus faibles que celles du théorème2.1.1 dans [57], où à la place de (i), il suppose que
(j) F1, R,DxF1, D2xF1 et DxR sont dénies continues et bornées par
une constante M (indépendante de ε). Á la place de (ii), il suppose que
(jj) pour a ∈ D avec F10(a) = 0, on a JF10(a) 6= 0,
où DxF désigne la matrice jacobienne de F par rapport à x,D2xF la matrice
hessienne de F et Jf (a) désigne le déterminant de la jacobienne de f calculéeen a.
40

III.1. Théorie de moyennisation
Démonstration. Voir [7].
Théorème III.2. Le résultat du théorème III.1 reste valable sans que l'hypo-
thèse (i) ne soit satisfaite.
Démonstration. Voir [8].
Exemple Le système de Liénardx = y − ε(a1x+ a2x
2 + · · ·+ anxn),
y = −x(III.1.10)
pour ε susamment petit et an 6= 0 a au plus
[n− 1
2
]cycles limites.
En utilisant les coordonnées polaires x = r cos θ, y = r sin θ, le sys-tème (III.1.10) s'écrit
r = −εr(a1 cos2 θ + · · ·+ anrn−1 cosn+1 θ),
θ = −1 + ε sin θ(a1 cos θ + · · ·+ anrn−1 cosn θ)
(III.1.11)
En divisant r par θ, on trouve
dr
dθ=
εr(a1 cos2 θ + · · ·+ anrn−1 cosn+1 θ)
1− ε sin θ(a1 cos θ + · · ·+ anrn−1 cosn θ)(III.1.12)
On sait que1
1− x= 1 + x+O(x2), |x| < 1
d'où
dr
dθ= εr(a1 cos2 θ+· · ·+anrn−1 cosn+1 θ)+ε2r sin θ cos θ(a1 cos θ+· · ·+anrn−1 cosn θ)2,
(III.1.13)On cherche maintenant la fonction moyennée F10(r)
F10(r) =1
2π
∫ 2π
0
f(θ, r)dθ
=r
2π
∫ 2π
0
(a1 cos2 θ + · · ·+ anr
n−1 cosn+1 θ)dθ,
(III.1.14)
On adr
dθ= εF10(r).
41

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
Ce qui implique
dr
dθ=εr
2π
(a1
∫ 2π
0
cos2 θdθ + a3r2
∫ 2π
0
cos4 θdθ + · · ·
+ an−1rn−2
∫ 2π
0
cosn θdθ + anrn−1
∫ 2π
0
cosn+1 θdθ
) (III.1.15)
Si n est impair, on a
dr
dθ=εr
2π
(a1I2 + a3r
2I4 + · · ·+ anrn−1In+1
). (III.1.16)
On cherche les points d'équilibre de l'équation (III.1.16). En posant X =
r2, on a
F10(r) = 0 =⇒(a1I2 + a3I4X + · · ·+ anIn+1X
n−12
)= 0.
Ce polynôme possède au plusn− 1
2racines positives.
Si n est pair, on a
dr
dθ=εr
2π
(a1I2 + a3r
2I4 + · · ·+ anrn−2In
). (III.1.17)
On cherche les points d'équilibre de (III.1.17). Posant toujours X = r2,
on trouve
F10(r) = 0 =⇒(a1I2 + a3I4X + · · ·+ anInX
n−22
)= 0.
Dans ce cas, ce polynôme possède au plusn− 2
2racines positives et
commen− 2
2=
[n− 1
2
].
Alors le système (III.1.10) possède au plus
[n− 1
2
]cycles limites.
III.1.2 Méthode de moyennisation du second ordre
Théorème III.3. Considérons le système diérentiel
x(t) = εF1(t, x) + ε2F2(t, x) + ε3R(t, x, ε), (III.1.18)
où F1, F2 : R × D → Rn et R : R × D × ]−εf , εf [ → Rn sont des fonctions
continues, T-périodiques en la première variable. D est un ouvert de Rn.
On suppose que
42

III.1. Théorie de moyennisation
(i) Pour tout t ∈ R, F1(t, .) ∈ C1(D), F1, F2, R et DxF1 sont localement
lipschitziennes par rapport à x. R est diérentiable par rapport à ε.
On dénit F10, F20 : D → Rn par
F10(z) =1
T
∫ T
0
F1(s, z)ds,
F20(z) =1
T
∫ T
0
(DxF1(s, z)
∫ s
0
F1(t, z)dt+ F2(s, z)
)ds.
(III.1.19)
et supposons que
(ii) pour V ∈ D, un ensemble ouvert et borné et pour tout
ε ∈ ]−εf , εf [ \ 0 , il existe aε ∈ V tel que F10(aε) + εF20(aε) = 0
et dB(F10(aε) + εF20(aε), V, aε) 6= 0 (i.e. le degré de Brouwer de
F10(aε) + εF20(aε)|aε est non nul).
Alors, pour |ε| > 0 susamment petit, il existe une solution T-périodique
isolée ϕ(., ε) de l'équation (III.1.18) telle que ϕ(0, ε) = aε.
Exemple On considère le système diérentielx = −y + εx− ε2x,y = x+ ε(x2 − y − 8xy)− ε2y.
(III.1.20)
En utilisant les coordonnées polaires (r, θ) où x = r cos θ, y = r sin θ. Cesystème s'écrit
r = −ε2r + ε(sin θr2 cos2 θ + 8r2 cos3 θ + 2r cos2 θ − r − 8r2 cos θ),
θ = 1 + ε(r cos3−2 cos θ sin θ − 8r sin θ cos2 θ).
Ou d'une manière équivalente
dr
dt= εF1(r, θ) + ε2F2(r, θ) +O(ε3),
tel que
F1(θ, r) =r2 sin θ + 8r2 cos2 θ + 2r cos2 θ − r − 8r2 cos θ,
F2(θ, r) =63r3 sin θ cos5 θ + 32r2 cos4 θ sin θ − 64r3 cos3 θ sin θ
+4r cos3 θ sin θ − 24r2 cos θ sin θ − 2r cos θ sin θ − r3r2 cos3 θ + 16r3 cos4 θ − 16r3 cos6 θ − 4r2 cos5 θ.
43

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
On applique la méthode de moyennisation du second ordre pour
F10(r) =1
2π
∫ 2π
0
F1(r, θ)dθ
=1
2π
∫ 2π
0
(r2 sin θ cos2 θ + 8r2 cos2 θ + 2r cos2 θ − r − 8r2 cos θ
)dθ.
d'où on aF10(r) = 0,
Calculons
y1(r, s) =
∫ s
0
F1(r, θ)dθ
=1
3r2 − 1
3r2 cos3 s+
8
3r2 sin s cos2 s− 8
3r2 sin s+ r cos s sin s.
Alors
f 1(r, s) =∂F1
∂ry1(r, s) =
∂F1
∂r
∫ s
0
F1(r, θ)dθ
=r(2r sin s cos2 s+ 16 cos s
)3+ 2
(cos2 s− 1− 16r cos s
)y1(r, s).
Donc la fonction F20(r) est
F20(r) =1
2π
∫ 2π
0
(f 1(r, s) + F2(r, s)
)ds
=r3 − r.
L'unique racine positive de F20(r) est r = 1. Comme ∂∂r
(F10(r)+εF20(r))|r=1 =
2ε 6= 0, d'aprés le théorème III.3, le système (III.1.20), pour 0 < ε << 1
susamment petit possède un seul cycle limite. Voir gure ci-dessous.
III.2 Nombre maximum de cycles limites par la
méthode de moyennisation
Considérons l'équation polynomiale de Liénard généralisée
x+ f(x)x2p+1 + g(x) = 0, (III.2.1)
où f(x) et g(x) sont deux polynômes de degré m,n respectivement etp ∈ N.Le but de notre travail est de donner une borne inférieure à H(m,n) qui est
44

III.2. Nombre maximum de cycles limites par la méthode demoyennisation
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
Figure III.1 Le cycle limite du système (III.1.20) pour ε = 0.001.
le nombre maximum de cycles limites qui peuvent bifurquer du centre linéairex = y, y = −x. pour cela, nous allons utiliser la méthode de moyennisationd'ordre 1 pour le premier cas et la méthode de moyennisation d'ordre 2 pourle deuxième cas.Les deux cas que nous considérons sont les suivants :Premier cas (k = 1)
f(x) = εf(x) et g(x) = x+ εg(x)
où f, g sont des polynômes de degré m et n respectivement et ε est un petitparamètre. (III.2.1) est donc équivalente au système suivant
x = y,
y = −x− ε(f(x)y2p+1 + g(x))(III.2.2)
deuxième cas (k = 2)
f(x) = εf1(x) + ε2f2(x) et g(x) = x+ εg1(x) + ε2g2(x),
où fi, gi sont des polynômes de degré m et n respectivement pour i = 1, 2 etε est un petit paramètre. L'équation (III.2.1) devient
x = y,
y = −x− ε(f1(x)y2p+1 + g1(x))− ε2(f2(x)y2p+1 + g2(x))(III.2.3)
On sait que Hk(m,n) ≤ H(m,n) ≤ H(m,n).
45

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
III.2.1 Théorème III.4
Sous les hypothèses précédentes, on a le théorème suivant :
Théorème III.4. (a) le nombre maximum de cycles limites qui peuvent bi-
furquer du centre linear x = y, y = −x, du système polynomial de Lié-
nard généralisé (III.2.2) est
H1(m,n) =[n
2
];
(b) le nombre maximum de cycles limites qui peuvent bifurquer du centre
linear x = y, y = −x, du système polynomial de Liénard généra-
lisé (III.2.3) est
H2(m,n) = max
[n2
],
[n− 1
2
]+[m
2
].
III.3 Démonstration du théorème III.4
III.3.1 Démonstration de la partie (a) du théorème III.4
Nous allons appliquer la méthode de moyennisation du premier ordre.Pour cela nous écrivons le système (III.2.2) en coordonnées polaires (r, θ)
où x = r cos θ, y = r sin θ. On pose f(x) =n∑i=1
aixi, g(x) =
m∑i=0
bixi. Le
système (III.2.2) s'écrit comme suit
r = −ε
(n∑i=0
airi+2p+1 cosi θ sin2(p+1) θ +
m∑i=0
biri cosi θ sin θ
),
θ = −1− εr
(n∑i=0
airi+2p+1 cosi+1 θ sin2p+1 θ +
m∑i=0
biri cosi+1 θ
).
(III.3.1)Si on prend θ comme une nouvelle variable indépendante, le système (III.3.1)devient
dr
dθ= ε
(n∑i=0
airi+2p+1 cosi θ sin2(p+1) θ +
m∑i=0
biri cosi θ sin θ
)+O(ε2)
46

III.3. Démonstration du théorème III.4
Calculons maintenant F10(r)
F10(r) =1
2π
∫ 2π
0
(n∑i=0
airi+2p+1 cosi θ sin2(p+1) θ +
m∑i=0
biri cosi θ sin θ
)dθ
On sait que ∫ 2π
0
cosk θ sin θdθ = 0, k = 0, 1, · · ·
∫ 2π
0
cos2k+1 θ sin2(p+1) θdθ = 0, k = 0, 1, · · ·
∫ 2π
0
cos2k θ sin2(p+1) θdθ = α2k,p 6= 0, k = 0, 1, · · ·
ce qui donne
F10(r) =2
2π
n∑i=0i pair
airi+2p+1
∫ 2π
0
cosi θ sin2(p+1) θdθ (III.3.2)
Donc
F10(r) =1
2πr2p+1
n∑i=0i pair
aiαi,pri. (III.3.3)
Le polynôme F10 a au plus[n
2
]racines positives.
Exemple 1
La méthode de moyennisation du premier ordre montre que le systèmex = y,
y = −x− ε [(1− 5x2 + x4)] y3 + x(III.3.4)
admet au plus deux cycles limites. En eet si on pose p = 1, f(x) = 1−5x2+x4
et g(x) = x dans le système (III.2.2), l'équation III.3.3 devient
F10(r) =r3
128(48− 40r2 + 3r4).
Ce polynôme possède deux racines positives distinctes en r2. Ces racines sont2√3et 2√
3 respectivement. D'où on a deux cycles limites d'amplitudes r1 =√2√3' 1.1547 et r2 =
√2√
3 ' 3.4641. Voir III.2.
47

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
Figure III.2 Les deux cycles limites du système (III.3.4).
III.3.2 Démonstration de la partie (b) du théorème III.4
Posons
f1(x) =n∑i=0
aixi , g1(x) =
m∑i=0
bixi , f2(x) =
n∑i=0
cixi et g2(x) =
m∑i=0
dixi.
Maintenant, on va appliquer la méthode de moyennisation du seconde ordrepour le système (III.2.3). L'équation (III.2.3) s'écrit en coordonnées polaires(r, θ) sous la forme suivante
r = −ε
(n∑i=0
airi+2p+1 cosi θ sin2(p+1) θ +
m∑i=0
biri cosi θ sin θ
)
−ε2(
n∑i=0
ciri+2p+1 cosi θ sin2(p+1) θ +
m∑i=0
diri cosi θ sin θ
),
θ = −1− εr
(n∑i=0
airi+2p+1 cosi+1 θ sin2p+1 θ +
m∑i=0
biri cosi+1 θ
)
− ε2
r
(n∑i=0
ciri+2p+1 cosi+1 θ sin2p+1 θ +
m∑i=0
diri cosi+1 θ
)
(III.3.5)
Considérons θ comme une nouvelle variable indépendante, alors le sys-tème (III.3.5) devient
48

III.3. Démonstration du théorème III.4
dr
dθ=ε
(n∑0
airi+2p+1 cosi θ sin2(p+1) θ +
m∑0
biri cosi θ sin θ
)
− ε2[(
n∑0
ciri+2p+1 cosi θ sin2(p+1) θ +
m∑0
diri cosi θ sin θ
)
− 1
r
(n∑0
airi+2p+1 cosi θ sin2(p+1) θ +
m∑0
biri cosi θ sin θ
)
×
(n∑0
airi+2p+1 cosi+1 θ sin2(p+1) θ +
m∑0
biri cosi+1 θ
)]
On peut écrire doncdr
dθsous la forme suivante :
dr
dθ= εF1(θ, r) + ε2F2(θ, r) +O(ε3),
où
F1(θ, r) =n∑i=0
airi+2p+1 cosi θ sin2(p+1) θ +
m∑i=0
biri cosi θ sin θ,
F2(θ, r) =n∑i=0
ciri+2p+1 cosi θ sin2(p+1) θ +
m∑i=0
diri cosi θ sin θ−
r cos θ sin θ
(n∑i=0
airi+2p cosi θ sin2p+1 θ +
m∑i=0
biri−1 cosi θ
)2
.
De (III.3.3), F10 est identiquement nulle si et seulement si ai = 0 pour tout ipair.
Calculons maintenant F20. Pour cela, nous commençons par chercherd
drF1(θ, r).
d
drF1(θ, r) =
n∑i=0
i impair
ai(i+ 2p+ 1)ri+2p cosi θ sin2(p+1) θ +m∑i=1
ibiri−1 cosi θ sin θ,
et∫ θ
0
F1(φ, r)dφ =n∑i=0
airi+2p+1
∫ θ
0
cosi φ sin2(p+1) φdφ+m∑i=0
bjrj
∫ θ
0
cosj φ sinφdφ
49

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
D'après la relation (III.3.3), on a
f10(r) = 0⇐⇒ ai = 0 ∀i pair
Ainsi, on a∫ θ
0
F1(φ, r)dφ =n∑i=0
i impair
airi+2p+1
∫ θ
0
cosi φ sin2(p+1) φdφ+m∑i=0
bjrj
(1− cosj+1 θ
j + 1
)
Notons par
y1(θ, r) =n∑i=0
i impair
airi+2p+1
∫ θ
0
cosi φ sin2(p+1) φdφ
On trouve que
y1(θ, r) =a1r2p+2(α11 sin2p+3 θ) + a3r
2p+4(α13 sin2p+3 θ + α23 sin2p+5 θ) + · · ·+alr
l+2p+1(α1l sin2p+3 θ + α2l sin
2p+5 θ + · · ·+ α l+12l sin
2p+l+2 θ)
+b0(1− cos θ) + · · ·+ bmrm(
1
m+ 1(1− cosm+1 θ)),
Donc∫ θ
0
F1(φ, r)dφ =a1r2p+2(α11 sin2p+3 θ) + a3r
2p+4(α13 sin2p+3 θ + α23 sin2p+5 θ) + · · ·
+alrl+2p+1(α1l sin
2p+3 θ + α2l sin2p+5 θ + · · ·+ α l+1
2l sin
2p+l+2 θ)
+b0(1− cos θ) + · · ·+ bmrm(
1
m+ 1(1− cosm+1 θ)),
(III.3.6)
où l est le plus grand nombre impair inférieur ou égal à n et αij sont desconstantes réelles calculées de l'intégration
∫ φ0
cosi φ sin2(p+1) φdφ pour tout i.
De plus, on a∫ 2π
0
cosi θ sin2p+1 θdθ = 0, i =0, 1, · · ·∫ 2π
0
cos2i+1 θ sin2(p+1) θdθ = 0, i =0, 1, · · ·∫ 2π
0
cosi θ sin θdθ = 0, i =0, 1, · · ·∫ 2π
0
cos2i θ sin2(p+1) θdθ = A2(p+1)2i 6= 0, i =0, 1, · · ·
50

III.3. Démonstration du théorème III.4
Alors
∫ 2π
0
d
drF1(θ, r)y1(θ, r)dθ =
∫ 2π
0
l∑i=1
i impair
(i+ 2p+ 1)airi+2p cosi θ sin2(p+1) θ +
m∑j=0
jbjrj−1 cosj θ sin θ
×
(n∑i=0
ri+2p+1(α1i sin2p+3 θ + α2i sin
2p+5 θ + · · ·+ α i+12i sin
(2p+i+2) θ)
+m∑j=0
bjj + 1
(1− cosj+1 θ)rj
]dθ
Ce qui donne
∫ 2π
0
d
drF1(θ, r)y1(θ, r)dθ =
l∑i=1
i impair
k∑j=0j pair
−(i+ 2p+ 1)
j + 1aibjr
i+j+2p
∫ 2π
0
cosi+j+1 θ sin2(p+1) θdθ
+l∑
i=1i impair
k∑j=0j pair
jaibjri+j+2p
(∫ 2π
0
α1i cosj θ sin(2p+4) θdθ
+ · · ·+∫ 2π
0
α i+12i cosj θ sin(2p+i+3) θdθ
)
= r2p+1
(α10a1b0 + (α12a1b2 + α30a3b0)r2 + · · ·+
∑i+j=l+k
αijaibjrl+k−1
),
où
αij =−(i+ 2p+ 1)
j + 1A
2(p+1)i+j+1 + j
(α1iA
2(p+2)j + · · ·+ α 1+i
2iA
i+2p+3j
)
pour tout i, j. k est le plus grand nombre pair inférieur ou égal à m.
51

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
De plus∫ 2π
0
F2(θ, r)dθ =∫ 2π
0
n∑i=0
ciri+2P+1 cosi θ sin2(P+1) θdθ +
∫ 2π
0
m∑j=0
djrj cosj θ sin θdθ
−∫ 2π
0
r cos θ sin θ
(n∑i=0
airi+2P cosi θ sin2P+1 θ +
m∑j=0
bjrj−1 cosj θ
)2
dθ
=b∑i=0i pair
ciri+2p+1
∫ 2π
0
cosi θ sin2(p+1) dθ
−2l∑
i=1i impair
k∑j=0j pair
aibjri+j+2p
∫ 2π
0
cosi+j+1 θ sin2(p+1) θdθ
car on a,
∫ 2π
0
r cos θ sin θ
(n∑i=0
airi+2p sin2p+1 θ cosi θ
)2
dθ = 0, i = 0, 1, · · ·
∫ 2π
0
r cos θ sin θ
(m∑j=0
bjrj−1 cosj θ
)2
dθ = 0, j = 0, 1, · · ·
Ansi
∫ 2π
0
F2(θ, r)dθ =n∑i=0i pair
ciri+2p+1A
2(p+1)i − 2
l∑i=1
i impair
k∑j=0j pair
aibjri+j+2pA
2(p+1)i+j+1
= r2p+1(A0c0 + · · ·+ Abcbr
b + 2(a1b0A2 + (a3b0 + a1b2)r2
+ · · ·+ A2(p+1)l+k+1 r
l+k−1∑
i+j=l+ki impairj pair
aibj
où b est le plus grand nombre pair inférieur ou égal à n.
52

III.3. Démonstration du théorème III.4
Donc le polynôme F20 est
F20(r) =1
2πr2p+1
[ρ10a1b0 + (ρ12a1b2 + ρ30a3b0)r2 + (ρ14a1b4 + ρ32a3b2
+ ρ50a5b0)r4 + · · ·+ ρlkalbkrl+k−1 + c0A
2(p+1)0 + c2A
2(p+1)2 r2
+ · · ·+ cbA2(p+1)b rb
],
(III.3.7)où ρij = αij − 2A
2(p+1)i+j+1 pour tout i, j.
Pour chercher les racines positives de F20, nous devons chercher les ra-cines du polynôme en r2. Notons que le degré du polynôme F20 est égal au
max
l + k − 1
2,b
2
.
Nous avonsb
2=[n
2
]et
l + k − 1
2=
[n− 1
2
]+[m
2
]
Exemple 2
Considérons n = 3,m = 2 et p = 2. La méthode de moyennisation duseconde ordre appliquée au système suivantx = y,
y = −x− ε [(−x+ x3)y3 − 1 + x2]− ε2[(1
2− x2 + x3)y5 + x2
](III.3.8)
nous donne le polynôme F20 suivant
F20(r) =−5r5
256(r4 − 6r2 + 8).
ce polynôme admet deux racines positives distinctes en r2 qui sont 2 et 4. Lesystème (III.3.8) possède deux cycles limites de rayons r1 =
√2 et r2 = 2.
Voir gure ci-dessous.
53

Chapitre III. Cycles limites des systèmes polynomiaux de Liénardgénéralisés
-2 -1 1 2
-2
-1
1
2
Figure III.3 Les deux cycles limites du système (III.3.8).
54
Chapitre IV
Solutions périodiques d'une classe
d'équations diérentielles du
quatrième ordre
SommaireIV.1 Autres théorèmes de moyennisation . . . . . . . . 56
IV.2 Recherche des solutions périodiques de l'équation
(IV.1.7) . . . . . . . . . . . . . . . . . . . . . . . . . . 58
IV.2.1 Théorème IV.3 . . . . . . . . . . . . . . . . . . . . 58
IV.2.2 Preuve du Théorème IV.3 . . . . . . . . . . . . . . 59
IV.3 Applications du théorème IV.3 . . . . . . . . . . . 62
IV.3.1 Corollaire 1 . . . . . . . . . . . . . . . . . . . . . . 62
IV.3.2 Corollaire 2 . . . . . . . . . . . . . . . . . . . . . . 63
55
Chapitre IV. Solutions périodiques d'une classe d'équationsdiérentielles du quatrième ordre
L'objectif de ce chapitre est d'étudier les solutions périodiques d'une classed'équations diérentielles du quatrième ordre de type
....x + (1 + p2)x+ p2x = εF (t, x, x, x, x) (IV.0.1)
où p est un rationnel diérent de −1, 0, 1, ε est un petit paramètre réel, et F est
une fonction non-autonome.
IV.1 Autres théorèmes de moyennisation
On considère le problème de la bifurcation des solutions T-périodiquesd'un système diérentiel de la forme
x(t) = F0(t, x) + εF1(t, x) + ε2F2(t, x, ε) (IV.1.1)
avec ε susamment petit. Les fonctions F0, F1 : R×Ω→ Rn sont des fonctionsde classe C2, T-périodiques par rapport à la première variable et Ω est un sousensemble ouvert de Rn. Supposons que e système non perturbé de (IV.1.1)
x(t) = F0(t, x) (IV.1.2)
a une sous variété de solutions périodiques de dimension k. Soit x(t, z) unesolution du système (IV.1.2) telle que x(0, z) = z. Le système linéarisé dusystème non perturbé le long d'une solution périodique x(t, z) est
y(t) = DxF0(t, x(t, z))y (IV.1.3)
On désigne parMα(t) la matrice fondamentale du système diérentiel linéaire(IV.1.3). On suppose qu'il existe un ensemble V avec V ⊂ Ω tel que pourchaque z ∈ V , x(0, z) est T-périodique.L'ensemble V est isochrone pour le système (IV.1.1) c.à.d qu'il est unensemble formé uniquement par des orbites périodiques, toutes ayant lamême période. Alors une réponse au problème de la bifurcation des solutionspériodiques x(t, z) contenue dans V est donnée par le théorème suivant.
On note par ξ⊥ : Rk × Rn−k → Rn−k la projection de Rn dans Rn−k
i.e.ξ⊥(x1, · · · , xn) −→ (xk+1, · · · , xn)
Théorème IV.1. Supposons que n = 2m. Soit V un sous ensemble ouvert et
borné de Rm et soit β : V → Rm une fonction de classe C2. Supposons que
56

IV.1. Autres théorèmes de moyennisation
1. Z =zα = (α, β(α)), α ∈ V
⊂ Ω et pour chaque zα ∈ Z la solution
x(t, zα) du système (IV.1.2) est T-périodique.
2. Pour tout zα ∈ Z, il existe une matrice fondamentale Mzα de (IV.1.3)telle que la matrice M−1
zα (0)−M−1zα (T ) a dans le coin supérieur droit une
matrice nulle m×m et dans le coin inférieur droit une matrice 4αm×mavec det(4α) 6= 0.
On considère la fonction F : V → Rn
F (α) = ξ⊥(
1
T
∫ T
0
M−1zα (t)F1(t, x(t, zα))dt
). (IV.1.4)
S'il existe a ∈ V avec F (a) = 0 et det
(dF
dα|(a)
)6= 0, alors il existe une
solution T-périodique ϕ(t, ε) du système (IV.1.1) telle que ϕ(0, ε) → zα si
ε→ 0.
Démonstration. Voir [7].
Théorème IV.2. (Perturbation d'un ensemble isochrone) Supposons qu'il
existe un ensemble V ouvert et borné avec V ⊂ Ω tel que pour chaque z ∈ V ,la solution x(t, z) est T-périodique, alors on considère la fonction F : V → Rn
F(z) =
∫ T
0
M−1z (t, z)F1(t,x(t, z))dt. (IV.1.5)
S'il existe a ∈ V avec F(a) = 0 et det((dF/dz)(a)) 6= 0, alors il existe une
solution ϕ(t, ε) T-periodic du système (IV.1.1) telle que ϕ(0, ε) → a quand
ε→ 0.
Démonstration. voir corollaire 1 de [7].
Dans [34] J. Llibre et A. Makhlouf ont étudié, en utilisant la méthode demoyennisation, les solutions périodiques de l'équation diérentielle ordinaireautonome du quatrième ordre
....x + (1 + p2)x+ p2x = εF (x, x, x, x), (IV.1.6)
où p est un rationnel diérent de −1, 0, 1, ε est un petit paramètre réel, et Fest une fonction non-linéaire autonome. En utilisant la méthode de moyen-nisation (théorème IV.2), nous avons étudié les solutions périodiques de lamême équation mais dans la cas non autonome c.à.d
....x + (1 + p2)x+ p2x = εF (t, x, x, x, x) (IV.1.7)
57

Chapitre IV. Solutions périodiques d'une classe d'équationsdiérentielles du quatrième ordre
IV.2 Recherche des solutions périodiques de
l'équation (IV.1.7)
On a prouvé le résultat suivant :
IV.2.1 Théorème IV.3
Théorème IV.3. Soit p = p1p2
un rationnel diérent de −1, 0, 1 avec p1 et p2
premiers entre eux. Pour chaque (X∗0 , Y∗
0 , Z∗0 , V
∗0 ) solution du système
F1(X0, Y0, Z0, V0) = 0,
F2(X0, Y0, Z0, V0) = 0,
F3(X0, Y0, Z0, V0) = 0,
F4(X0, Y0, Z0, V0) = 0,
(IV.2.1)
satisfaisant
det
(∂(F1, F2, F3, F4)
∂(X0, Y0, Z0, V0)|(X0,Y0,Z0,V0)=(X∗
0 ,Y∗0 ,Z
∗0 ,V
∗0 )
)6= 0 (IV.2.2)
où
F1(X0, Y0, Z0, V0) =
∫ 2πp2
0
cos tF (t,A,B, C,D)dt,
F2(X0, Y0, Z0, V0) =−∫ 2πp2
0
sin tF (t,A,B, C,D)dt,
F3(X0, Y0, Z0, V0) =−1
p
∫ 2πp2
0
sin(pt)F (t,A,B, C,D)dt,
F4(X0, Y0, Z0, V0) =−1
p
∫ 2πp2
0
cos(pt)F (t,A,B, C,D)dt,
avec
A(t) =X0 sin t+ Y0 cos t− Z0 cos(pt) + V0 sin(pt)
P 2 − 1,
B(t) =X0 cos t− Y0 sin t+ P (Z0 sin(pt) + V0 cos(pt))
P 2 − 1,
C(t) =−X0 sin t− Y0 cos t+ P 2(Z0 cos(pt)− V0 sin(pt))
P 2 − 1,
D(t) =−X0 cos t+ Y0 sin t− P 3(Z0 sin(pt) + V0 cos(pt))
P 2 − 1,
58

IV.2. Recherche des solutions périodiques de l'équation (IV.1.7)
l'équation diérentielle (IV.1.7) a une solution périodique x(t, ε) tendant vers
la solution
x(t) =X∗0 sin t+ Y ∗0 cos t− Z∗0 cos(pt) + V ∗0 sin(pt)
P 2 − 1(IV.2.3)
de l'équation....x + (1 + p2)x+ p2x = 0,
quand ε→ 0. Notons que cette solution est périodique de période 2πp2.
IV.2.2 Preuve du Théorème IV.3
Introduisant les variables (t, x, y, z, v) = (t, x, x, x,...x ), on écrit l'équation
diérentielle du quatrième ordre non autonome (IV.1.7) sous la forme d'unsystème diérentiel du premier ordre :
x = y,
y = z,
z = v,
v = −p2x− (1 + p2)z + εF (t, x, y, z, v),
(IV.2.4)
déni dans un sous-ensemble ouvert Ω de R4. Le système (IV.2.4) avec ε = 0
sera appelé le système non perturbé. Plus précisément on a la formex
y
z
v
=
0 1 0 0
0 0 1 0
0 0 0 1
−p2 0 −1− p2 0
x
y
z
v
+ ε
0
0
0
F (t, x, y, z, v)
(IV.2.5)
Le système non perturbé a un seul point singulier à l'origine avec les valeurspropres imaginaires ±i et ±ip.Écrivant le système (IV.2.4) de telle manière que la partie linéaire à l'originesera sous la forme normale réelle de Jordan. En faisant le changement devariable (x, y, z, v) → (X, Y, Z, V ) et soit B la matrice de changement devariables. On a A = B−1JB avec J la matrice de Jordan suivante
J =
0 −1 0 0
1 0 0 0
0 0 0 −p0 0 p 0
d'où on a
BA = JB =⇒ BA− JB = 0,
59
Chapitre IV. Solutions périodiques d'une classe d'équationsdiérentielles du quatrième ordre
et en résolvant le système de 16 équations a 16 inconnus, on trouve la matricede changement de variables B. On a donc
X = Bx⇒ x = B−1X,
c.à.d X
Y
Z
V
=
0 p2 0 1
p2 0 1 0
1 0 1 0
0−1
p0−1
p
x
y
z
v
(IV.2.6)
Ce qui implique
x
y
z
v
=
01
p2 − 1− 1
p2 − 10
1
p2 − 10 0
p
p2 − 1
0 − 1
p2 − 1
p2
p2 − 10
− 1
p2 − 10 0 − p3
p2 − 1
X
Y
Z
V
(IV.2.7)
On obtient donc le systèmeX = −y +G(t,X, Y, Z, v),
Y = X,
Z = −pV,V = pZ − ε
pG(t,X, Y, Z, V ),
(IV.2.8)
où G(t,X, Y, Z, V ) = F (t, A,B,C,D) avec
A =Y − Zp2 − 1
, B =pV +X
p2 − 1,
C =p2Z − Yp2 − 1
, D = −p3V +X
p2 − 1.
Notons que le changement de variables (IV.2.6) est déni lorsque p est diérent
de −1, 0, 1, parce que le déterminent de la matrice de passage est(p2 − 1)2
p.
60

IV.2. Recherche des solutions périodiques de l'équation (IV.1.7)
Nous allons appliquer le théorème IV.2 au système diérentiel IV.2.8. Posant
x = (X, Y, Z, V ), t = t
F0(t,x) = (−Y,X,−pV, pZ),
F1(t,x) = (F (t, A(t), B(t), C(t), D(t)), 0, 0,−1
pF (t, A(t), B(t), C(t), D(t))),
F2(t,x, ε) = 0, Ω = R4.
Pour ε = 0, le système (IV.2.8) a un centre linéaire à l'origine. En utilisantla notation du théorème IV.2, la solution périodique x(t, z) de ce centre avecz = (X0, Y0, Z0, V0) est
X(t) = X0 cos t− Y0 sin t,
Y (t) = Y0 cos t+X0 sin t,
Z(t) = Z0 cos(pt)− V0 sin(pt),
V (t) = V0 cos(pt) + Z0 sin(pt),
(IV.2.9)
Cet ensemble de solutions périodiques est de dimension 4, ayant toutes unepériode 2πp2. Calculons maintenant les zéros α = (X∗0 , Y
∗0 , y
∗0, Z
∗0) du système
F(α) = 0 où F(α) est donnée par l'équation (IV.1.5) . La matrice fondamen-tale le long d'une solution périodique M(t) du système (IV.2.8) avec ε = 0
est
M(t) =
cos t − sin t 0 0
sin t cos t 0 0
0 0 cos(pt) − sin(pt)
0 0 sin(pt) cos(pt).
(IV.2.10)
La matrice inverse de cette matrice est
M−1(t) =
cos t sin t 0 0
− sin t cos t 0 0
0 0 cos(pt) sin(pt)
0 0 − sin(pt) cos(pt)
(IV.2.11)
Calculons maintenant la fonction F(α). Le système F(α) = 0 peut s'écrirecomme suit
F1(X0, Y0, Z0, V0)
F2(X0, Y0, Z0, V0)
F3(X0, Y0, Z0, V0)
F4(X0, Y0, Z0, V0)
=
0
0
0
0
(IV.2.12)
61

Chapitre IV. Solutions périodiques d'une classe d'équationsdiérentielles du quatrième ordre
où
F1(X0, Y0, Z0, V0) =
∫ 2πp2
0
cos tF (A,B, C,D)dt,
F2(X0, Y0, Z0, V0) = −∫ 2πp2
0
sin tF (A,B, C,D)dt,
F3(X0, Y0, Z0, V0) =−1
p
∫ 2πp2
0
sin(pt)F (A,B, C,D)dt,
F4(X0, Y0, Z0, VO) =−1
p
∫ 2πp2
0
cos(pt)F (A,B, C,D)dt,
avec A,B, C et D sont comme dans l'énoncé du théorème IV.3.
Pour ε 6= 0 susamment petit,si les zéros (X∗0 , Y∗
0 , y∗0, Z
∗0) du sys-
tème (IV.2.12) sont simples alors elles donnent des orbites périodiques, c'està dire si
det
(∂(F1, F2, F3, F4)
∂(X0, Y0, Z0, V0)|(X,Y,Z,V )=(X∗
0 ,Y∗0 ,Z
∗0 ,V
∗0 )
)6= 0
Pour chaque racine simple (X∗0 , Y∗
0 , Z∗0 , V
∗0 ) du système (IV.2.12), on obtient
une solution x(t) 2πp2-périodique du système (IV.1.7) avec 0 < ε << 1 quitend vers la solution périodique
x(t) =X∗0 sin t+ Y ∗0 cos t− Z∗0 cos(pt) + V ∗0 sin(pt)
p2 − 1(IV.2.13)
de l'équation....x + (1 + p2)x+ p2x = 0,
quand ε→ 0.
IV.3 Applications du théorème IV.3
IV.3.1 Corollaire 1
Si F (t, x, x, x,...x ) = (x2+x−x)cos( t
2), l'équation diérentielle (IV.1.7) avec
p = 32possède une seule solution périodique x(t, ε) qui tend vers la solution
périodique x(t) de période 4π (donnée par (IV.2.3) ) de l'équation
....x +
13
4x+
9
4x = ε(x2 + x− x) cos(
t
2)
quand ε→ 0, où
(X∗0 , Y∗
0 , Z∗0 , V
∗0 ) = (0,−6,−3, 0).
62

IV.3. Applications du théorème IV.3
Démonstration. En eet, l'équation diérentielle
....x +
13
4x+
9
4x = ε(x2 + x− x) cos(
t
2)
correspond à l'équation (IV.1.7) avec p = 32et F (t, x, x, x,
...x ) = (x2 + x −
x)cos(t
2).
Après avoir eectuer les calculs, les fonctions F1, F2, F3 et F4 du théorèmeIV.3 sont
F1(X0, Y0, Z0, V0) = π
(−4
5Z0 −
6
5V0 +
16
25X0V0 −
16
25Y0Z0
),
F2(X0, Y0, Z0, V0) = π
(6
5Z0 −
4
5V0 −
16
25X0Z0 −
16
25Y0V0
)F3(X0, Y0, Z0, V0) = π
(−8
15X0 −
8
15Y0 −
32
75X0Y0
),
F4(X0, Y0, Z0, VO) = π
(−16
75Y 2
0 +16
75X2
0 +8
15X0 −
8
15Y0
),
.
Le système d'équations F1 = F2 = F3 = F4 = 0 a une seule solution réelledonnée par
(X∗0 , Y∗
0 , Z∗0 , V
∗0 ) = (
−5
2,−5
2, 0, 0).
Comme le Jacobien
det
(∂(F1, F2, F3, F4)
∂(X0, Y0, Z0, V0)|(X0,Y0,Z0,V0=(−5
2,−5
2,0,0)
)= 469.9187726 6= 0,
d'aprés le théorème IV.3, on a une seule solution périodique x(t) donnée par(IV.2.3).
IV.3.2 Corollaire 2
Maintenant, si on prend
F (t, x, x, x,...x ) = xx− x+ sin(t)
alors l'équation (IV.1.7) avec p = 2 a trois solutions périodiques xk(t, ε), k =
1, 2, 3 qui tendent vers les solutions 2π-périodiques xk(t) données par (IV.2.3)avec (X∗0 , Y
∗0 , Z
∗0 , V
∗0 ) égal à
(0,−6,−3, 0), (0, 3√
5 + 3,−92− 3
2
√5, 0)
et (0,−3√
5 + 3,−92
+ 32
√5, 0),
63

Chapitre IV. Solutions périodiques d'une classe d'équationsdiérentielles du quatrième ordre
de l'équation....x +
13
4x+
9
4x = 0 quand ε→ 0.
Démonstration. L'équation
....x + 5x+ 4x = ε(xx− x+ sin(t)). (IV.3.1)
qui correspond au cas p = 2 et F (t, x, x, x,...x ) = xx− x+ sin(t). Les fonctions
F1, F2, F3 et F4 du théorème IV.3 sont
F1(X0, Y0, Z0, V0) = π(1
18Y0V0 +
1
18X0Z0 −
1
3X0),
F2(X0, Y0, Z0, V0) = π(1
18X0V0 −
1
18Y0Z0 −
1
3Y0 − 1),
F3(X0, Y0, Z0, V0) = π(1
36Y 2
0 −1
36X2
0 +1
3Z0),
F4(X0, Y0, Z0, VO) = π(−1
18X0Y0 +
1
3V0).
Le système d'équations F1 = F2 = F3 = F4 = 0 possède trois solutions réellesdonnées par
s1 = (0,−6,−3, 0), s2 = (0, 3√
5 + 3,−9
2− 3
2
√5, 0)
et
s3 = (0,−3√
5 + 3,−9
2+
3
2
√5, 0).
De plus, on a
det
(∂(F1, F2, F3, F4)
∂(X0, Y0, Z0, V0)|(X0,Y0,Z0,V0=(−5
2,−5
2,0,0)
)= 469.9187726 6= 0.
Donc on a trois solutions périodiques x1(t), x2(t) et x3(t) données par (IV.2.3).
64

Conclusion et perspectives
La recherche des cycles limites des équations diérentielles dépendant d'unpetit paramètre peut être étudiée au moyen de la méthode de moyennisation.elle permet aussi de donner une borne inférieure pour le nombre de cycleslimites que peut avoir l'équation diérentielle perturbée. Ceci est justementla seconde partie du seizième problème de Hilbert.
Nous continuons à travailler sur des problèmes analogues. On se propose d'étu-dier le nombre maximum de cycles limites du système
x = y +∑k>1
εkhkl (x),
y = −x−∑k>1
εk(fkn(x)y2p+1 + gkm(x)),
où hl(x), fn(x) et gm(x) sont des polynômes de degré l, n et m respectivement.ε est un petit paramètre.
65

Annexes
Annexe
L'algorithme pas à pas
On propose d'abord une fonction à deux variables x et y :
Hn(x, y) = yngn,n(x) + yn−1gn−1,n(x) + yn−2gn−2,n(x) + · · ·+ yg1,n(x) + g0,n(x)
(A.1)
Il s'agit de calculer Hn(x, y) et de faire en sorte que cette fonction ne dépendque de la variable x. On ne considère ici que des polynômes F (x) et G(x) quisont impairs.
Hn(x, y) =i=n∑i=0
yigi,n(x)
Hn = (y − F (x))∂Hn
∂x−G(x)
∂Hn
∂y(A.2)
Hn(x, y) =n∑i=0
yi+1g′i,n(x)− F (x)n∑i=0
yig′i,n(x)−G(x)n∑i=0
iyi−1gi,n(x)
si on regroupe maintenant les puissances de y ensemble :
Hn(x, y) =− F (x)g′0,n −G(x)g1,n +n−1∑i=1
yi(g′i−1,n − F (x)g′i,n − (i+ 1)G(x)gi+1,n
)+ yn
(g′i−1,n − F (x)g′n,n
)+ yn+1g′n,n (A.3)
On veut annuler tout les coecients des termes en yi, on commence par leterme de plus haut degré :
g′n,n(x) = 0 donc gn,n(x) = Cn,n
66

Annexes A
ici le fait de prendre Cn,n = 1 n'enlève rien à la généralité du problème, c'estexactement comme si l'on divisait Hn(x, y) par Cn,n. Ainsi le terme en yn dans(A.3) devient :
yng′n−1,n(x)
en l'annule en faisant gn−1,n(x) = Cn−1,n = 0. La constante d'intégrationest choisie nulle, comme le seront toutes les autres constantes : Ci,n = 0 si0 ≤ i < n. une fois que l'on a trouvé les deux premiers polynômes gn,n(x) etgn−1,n(x) on peut utiliser la formule de récurrence :
g′i,n(x) = g′i+1,n(x)F (x) + (i+ 2)gi+2,n(x)G(x) pour 0 ≤ i ≤ n− 2 (A.4)
qui est obtenue en posant i → i + 1 dans le coecient du terme en yi dansHn (équation (A.3)). Quand on a calculé tout les gi,n(x), on a accès au reste :
Rn(x)déf= Hn = −F (x)g′0,n(x)−G(x)g1,n(x) (A.5)
Ainsi le polynôme Rn(x) ne dépend pas de la variable y. On peut donc choisiry dans la formule (A.2) comme l'on veut sans changer Rn(x). Si l'on choisitde faire y = 0 dans (A.2), on trouve :
Rn(x) = −F (x)∂Hn
∂x(x, y = 0)−G(x)
∂Hn
∂y(x, y = 0) (A.6)
or∂Hn
∂x= yn−2g′n−2,n + yn−3g′n−3,n + ...+ g′0,n
donc∂Hn
∂x(x, y = 0) = g′0,n(x)
de même∂Hn
∂y(x, y = 0) = g1,n(x)
ainsi on trouve la formule (A.5).Si l'on choisit de faire y = F (x) dans (A.2), on trouve :
Rn(x) = −G(x)∂Hn
∂y(x, y = F (x))
donc
Rn(x) = −G(x)(g1,n + 2g2,nF (x) + · · ·+ igi,nF
i−1(x) + · · ·+ ngn,nFn−1(x)
)(A.7)
67
Annexes
Propriétés de Rn et gi,n
Les polynômes gi,n ont la parité de i . On peut comprendre ce fait parrécurrence :
gn,n = 1 est pair
etgn−1,n = 0 est impair
Si nous utilisons la formule de récurrence (A.4) : pour i pair, gi+1,n est impairet donc sa dérivée est paire. Le polynôme F (x) est impair et donc le produitg′i+1,nF est impair. gi+2,n(x) est pair et g(x) est impair donc le produit gi+2,nF
est impair. Ainsi g′i,n est impair et donc sa primitive sera paire. Le mêmeraisonnement implique que les polynômes gi,n sont impairs pour i impair.Maintenant que l'on connaît la parité des polynômes gi,n, il est facile d'endéduire d'après l'équation (A.7) que les polynômes Rn(x) sont pairs.On peut aussi démontrer par récurrence que les polynômes gi,n(x) ont uneracine de multiplicité n − i en x = 0 pour 2 ≤ i ≤ n. Au rang 2 le calculedirect nous donne (pour l'équation de Van der Pol) :
gn−2,n(x) = (n
2)x2
au rang 3 :g′n−3,n(x) = nxF (x)
or F (x) a une racine de multiplicité 1 en x = 0, donc g′n−3,n(x) a une racinede multiplicité 2 et sa primitive, aura une racine de multiplicité 3.
Maintenant si on considère la formule de récurrence (A.4) g′i+1,n(x) est demultiplicité n − i − 2, multiplié par F (x) cela nous donne un polynôme demultiplicité n− i− 1. gi+2,n est de multiplicité n− i− 2 et multiplié par G(x)
on obtient une multiplicité n−i−1. Ainsi d'après (A.4), g′i,n, qui est l'additionde deux polynômes de multiplicité n− i−1, est donc de multiplicité n− i−1.
Sa primitive, gi,n(x), est donc de multiplicité n− i en zéro.La formule (A.7) montre maintenant clairement que Rn(x) a une racine demultiplicité n en x = 0. On note xi,n les racines strictement positives, ellesont chacune leur symétrique x−i,n = −xi,n. Pour chaque racine xi,n, on calculela valeur K∗i,n telle que la courbe Hn(x, y) = K∗i,n est tangente à la droitex = xi,n :
Hn(xi,n, y) = K∗i,n,
∂Hn
∂y(xi,n, y) = 0
(A.8)
68

Annexes A
Les deux inconnues du système (A.8) sont yi,n et K∗i,n. On trouve y avecla deuxième équation. Ensuite, il sut de réinjecter ce y dans la premièreéquation pour trouver K∗i,n. La deuxième équation du système (3.4.8) est uneéquation en y de degré n− 1. On cherche ces racines en x = xi,n. on a :
Rn(xi,n) = (y − F (xi,n))∂Hn
∂x(xi,n, y)−G(xi,n)
∂Hn
∂y)(xi,n, y) = 0
On peut voir Rn(xi,n) comme diérence de deux polynômes en y :
Rn(xi,n) = P1(y)− P2(y) = 0
Comme Rn(xi,n) ne dépend pas de y, cette diérence est nulle pour tout ydonc : P1(y) = P2(y) ∀y; Ainsi :
(y − F (xi,n))∂Hn
∂x(xi,n, y) = G(xi,n)
∂Hn
∂y(xi,n, y), ∀y
donc le polynôme∂Hn
∂x(xi,n, y) a une racine yi,n en y = F (xi,n). Si on note
par Mi,n(xi,n, yi,n) le point de coordonnées (xi,n, yi,n). Les points Mi,n sont lespoints pour lesquels x est maximum sur les courbes Hn(x, y) = K∗i,n. De plusils sont tous sur la courbe y = F (x). Ceci est en accord avec le fait que lepoint de x maximum sur chaque cycle limite est obligatoirement sur la courbey = F (x). Les cycles limites ont leurs y maximum en x = 0 (y = 0 en g(x) = 0
or G(0) = 0). Il en est de même pour les courbes Hn(x, y) car :
∂Hn
∂x(x = 0, y) = yn−2g′n−2,n(0) + yn−3g′′n−3,n(0) + · · ·+ g′0,n(0) = 0
car gi,n(x = 0) = 0.
Le choix des constantes d'intégration
A chaque étapes, lors de l'intégration des fonctions g′j,n(x), on a une li-berté quant au choix des constantes d'intégration. Celles-ci sont toutes choisiesnulles (sauf la première). Pour respecter la symétrie du système (II.1.1) :
(x, y)→ (−x,−y) (A.9)
il faut queHn(x, y) = Hn(−x,−y) (A.10)
69

Annexes
cette symétrie est importantes car certaines courbes Hn sont des approxima-tions des cycles limites de (II.1.1) qui sont eux mêmes symétriques par apportà O(0, 0). On doit retrouver la symétrie ((A.10)) dans chaque composante deHn(x, y) : chaque yigi,n(x) doit avoir la symétrie ((A.10)), il faut donc queles polynômes g2p+1(x) soient impairs en x. A priori, on ne connait pas leursparité mais pour qu'ils aient une chance d'être impairs, il est nécessaire queg2p+1(x = 0) = c2p+1,n = 0. De même, la symétrie (A.10) nécessite que lespolynômes g2p(x) soient pairs en x. Mais cette fois ci cela n'implique rien surles constantes c2p,n.
On voit donc que la symétrie (A.10) oblige tous les ci,j avec j impairs a êtrenuls mais il reste tout les constantes c2k,n avec 0 < k < n
2entier.
• Voici le code Mathematica utilisé pour calculer les polynomes Hn(x, y)
et Rn(x) ainsi que les racines xi,n et les valeurs yi,n et K∗i,n :
F = ep ∗(x^3/3 − x ) / . ep−>2 ,G = x ;Clear [ g , x0 , y0 , k , nbr , H, R ] ; P = y − Expand [F ] , q = −Go r d r e i n i t i a l = 2 ; o r d r e f i n a l = 30 ;Do[o rdre = compteur ∗2 ;Print [ " ordre " , ordre ] ;temp = Sum[ y^( i )∗ g [ ordre ] [ i ] [ x ] , i , 0 , ordre ] ;g [ ordre ] [ o rdre ] [ x_] = 1 ;g [ ordre ] [ o rdre − 1 ] [ x_] = 0 ;Do[j = ordre − 2 − j j ;g [ ordre ] [ j ] [ x_] =Integrate [D[ g [ ordre ] [ j + 1 ] [ x ] , x ]∗F + ( j + 2)∗ g [ ordre ] [ j + 2 ] [ x ]∗G, x ] ;
Print [ j j ] , j j , 0 , ordre − 2 ] ;R[ ordre ] = −g [ ordre ] [ 1 ] [ x ]∗G − D[ g [ ordre ] [ 0 ] [ x ] , x ]∗F;H[ ordre ] = Expand [ temp ] , compteur , o r d r e i n i t i a l /2 , o r d r e f i n a l /2 ]o r d r e i n i t i a l = 2 ; o r d r e f i n a l = 120 ;Do[ o rdre = compteur ∗2 ;Print [ " ordre " , ordre ] ;nombreracine = 0 ;r a c i n e s = NSolve [R[ ordre ] == 0 , x , WorkingPrecision −> 5 ] ;Do[ I f [Im [ r a c i n e s [ [ j , 1 , 2 ] ] ] == 0 && Re [ r a c i n e s [ [ j , 1 , 2 ] ] ] > 0 ,
nombreracine = nombreracine + 1 ;
70

Annexes A
Print [ r a c i n e s [ [ j , 1 , 2 ] ] ] ;x0 [ ordre ] [ nombreracine ] = r a c i n e s [ [ j , 1 , 2 ] ] ] , j , 1 ,Exponent [R[ ordre ] , x ] ] ;
nbr [ ordre ] = nombreracine , compteur , o r d r e i n i t i a l /2 , o r d r e f i n a l /2 ]o r d r e i n i t i a l = 2 ; o r d r e f i n a l = 120 ;Do[ o rdre = compteur ∗2 ;Print [ " ordre " ordre ] ;Do[ temp2 =
NSolve [ (D[H[ ordre ] , y ] / . x −> x0 [ ordre ] [ i 1 ] ) == 0 , y ,WorkingPrecision −> 5 ] ;
Do[ I f [Im [ temp2 [ [ i2 , 1 , 2 ] ] ] == 0 ,y0 [ ordre ] [ i 1 ] = temp2 [ [ i2 , 1 , 2 ] ] ] , i2 , 1 ,Exponent [H[ ordre ] , y ] − 1 ] ;
k [ ordre ] [ i 1 ] =H[ ordre ] / . x −> x0 [ ordre ] [ i 1 ] , y −> y0 [ ordre ] [ i 1 ] ;Print [ y0 [ ordre ] [ i 1 ] , "&" , k [ ordre ] [ i 1 ] ] , i1 , 1 ,nbr [ ordre ] ] , compteur , o r d r e i n i t i a l /2 , o r d r e f i n a l /2 ]
o r d r e i n i t i a l = 2 ; o r d r e f i n a l = 120 ;tab leau = n , x0 , y0 , k ;Do[ o rdre = i1 ∗2 ;Do[ temp3 =Append [ tableau , ordre , N[ x0 [ ordre ] [ i 2 ] , 4 ] , N[ y0 [ ordre ] [ i 2 ] , 4 ] ,N[ k [ ordre ] [ i 2 ] , 4 ] ] ;
tab leau = temp3 , i2 , 1 , nbr [ ordre ] ] , i1 , o r d r e i n i t i a l /2 ,o r d r e f i n a l / 2 ] ;
tab leau // MatrixForm
71
Bibliographie
[1] Alsholm P. : Existence of limit cycles of generalized Liénard equtions.J. Math. Anal. Appl, 171(1):242255, 1992.
[2] Blows T. R. and Lloyd N. G. : The number of small-amplitude limitcycles of Liénard equtions. Math. Proc. Camb. Phil. Soc, 95:359366,1984.
[3] Blows T. R. and Perko L. : Bifurcation of limit cycles from centersand separatrix cycles of palnar analytic systems. Siam Review, 36(3):341376, 1994.
[4] Boulfoul A. and Makhlouf A. : The GN's method for some casesof Liénard systems. In Proceeding of the rst days on dynamical systems
and dierential equations, 2007.
[5] Boulfoul A. and Makhlouf A. : Limit cycles of the generalizedpolynomial Liénard dierential equations. Ann. of Di. Eqs, 28(2):127131, 2012.
[6] Boulfoul A. and Makhlouf A. : On the limit cycles for a class offourth-order dierential equations. International Journal of dierential
Equations and Applications, 11(3):135144, 2012.
[7] Buiã A., Françoise J.P. and Llibre J. : Periodic solutions of non-linear periodic dierential systems with a small parameter. Comm. On
pure and Appl. Anal., 6:103111, 2007.
[8] Buicã A. and Llibre J. : Averaging methods for nding periodic orbitsvia Brouwer degree. Bulletin des sciences mathématiques, 128:722, 2004.
[9] Carriao P.C, Faria L.F.O and Miyagaki O.H. : Periodic solu-tions of extended Fisher-Kolmogorov and Swift-Hohenberg equations bytruncature techniques. Nonlinear Anal, 67:30763083, 2007.
[10] Christopher C. and Lloyd N. G. : Polynomial systems : a lowerbound for the Hilbert numbers. Proc. R. Soc. Lond.A, 450:219224,1995.
72

Bibliographie
[11] Christopher C.J and Lynch S. : Small amplitude limit cycle bifur-cations for Liénard systems with quadratic or cubic damding or restoringforces. Nonlinearity, 12:10991112, 1999.
[12] Coppel W. C. : Some quadratic systems with at most one limit cycle.In Dynamics reported. New York, NY : Wiley, 2:6168, 1998.
[13] Dumortier F. & Li C. : Quadratic Liénard equations with quadraticdamping. J. Dierential Equations, 139:4159, 1997.
[14] Dumortier F. and Li C. : On the uniqueness of limit cycles surroudingone or more singularities for Liénard equations. Nonlinearity, 9:14891500, 1996.
[15] Dumortier F. and Li C. : Quadratic Liénard equations with quadraticdamping. J. Di. Eqs., 139:4159, 1997.
[16] Dumortier F. and Rousseau C. : Cubic Liénard equations with lineardamping. Nonlinearity, 3:10151039, 1990.
[17] Dumortier F., Panazzolo D. and Roussarie R. : More limit cyclesthan expected in Liénard systems. Proc. Amer. Math. Soc., 135:18951904, 2007.
[18] Gasull A. and Terregrosa J. : Small-amplitude limit cycles inLiénard systems via multiplicity. Journal of dierential equations, 159:10151039, 1998.
[19] Giacomini H. and Neukirch S. : Number of limit cycles of the Liénardequation. Phys. Rev. E, 56(4):38093813, 1997.
[20] Giacomini H. and Neukirch S. : Improving a method for the studyof limit cycles of the Liénard equation. Phys. Rev. E, 57(6):65736576,1998.
[21] Giacomini H., Llibre J. and Viano M. : On the nonexistence, exis-tence and uniqueness of limit cycles. Nonlinearity, 9(2):501516, 1996.
[22] Guckenheimer J. and Holmes P. : Nonlinear oscillations, dynamical
systems, and bifurcations of vector elds, volume 42. Springer-Verlag,1990.
[23] Hilbert D. : Mathematische problems. Lecture in : SecondInternat.
Cong. Math. Paris, 1900, Nachr. Ges. Wiss. Gottingen. Math. Phys. Ki
5 (1900), 253-297 ; English Transl : Bull. Amer. Math. Soc, 8:437479,1902.
[24] Ilyashenko Y. : Centnnial History of Hilbert's 16th Problem. Bulletinof the American Mathematical Society, 39(3):590595, 2002.
73

Bibliographie
[25] Kale O. : An analysis of a nonlinear elastic force Van der Pol oscillatorequation. American Physical Society, pages 68, 2003.
[26] Karlsson M. and Hook A. : Solitons-like pulses governed by fourthorder dispersion in optical bres. Opt. Com, 104:303307, 1994.
[27] Levi M. : Qualitative analysis of the periodically forced relaxationsoscillations. Mem. Amer. Math. Soc., 32, 1981.
[28] Levinson N. and Smith D. : A general equation for relaxation oscil-lations. Duke. Math. Journal, 9:382, 1942.
[29] Li C. and Llibre J. : Uniqueness of limit cycle for Liénard equationsof degree four. J. Di. Eqs, 252:31423162, 2012.
[30] Li Jibin. : Hilbert's 16th Problem and bifurcations of planar polynomialvector elds. I. J. Bifurcation and Chaos, 13(1):47106, 2003.
[31] Liénard A. : Etude des oscillations entretenues. Rev. Gen. Electricité,23:946954, 1928.
[32] Lins A. and De Melo W. and Pugh C.C. : On Liénard's equation.Lecture notes in math, Springer, Berlin, 597:335357, 1977.
[33] Llibre J. : Averaging theory and limit cycles for quadratic systems.Radovi Mat., 11:114, 2002.
[34] Llibre J. and Makhlouf A. : On the limit cycles for a class of fourth-order dierential equation. J. Phys. A : Math.Theor., 45:16pp, 2012.
[35] Llibre J. and Mereu A.C. and Teixeira M.A. : Limit cycles ofthe generalized polynomial Liénard dierential equations. Math. Proc.
Camb. Phil. Soc, 148:363383, 2010.
[36] Llibre J. and Valls C. : On the number of limit cycles of a class ofpolynomial dierential systems. Proc. R. Soc. A, pages 14712946, 2012.
[37] Llibre J., Pizarro L. and Ponce E. : Limit cycles of polynomialLiénard systems. Phys. Rev. E, 58:51855187, 1998.
[38] Lloyd N. G. : Liénard system with several limit cycles. Math. Proc.
Camb.Phil. Soc., 102:565572, 1987.
[39] Lloyd N. G. : Limit cycles of polynomial systems-some recent develop-ments. London Mathematical Society Lecture Note Series, Cambridge,
UK : Cambridge University Press., (127):192234, 1988.
[40] Lloyd N.G. : Degree theory. Cambridge tracts in mathematics ; 73.Cambridge University Press, 1978.
[41] Lloyd N.G. & Lynuch S. : Small amplitude limit cycles of certainLiénard systems. Proc. R. Soc. Lond. A, 418:199208, 1988.
74

Bibliographie
[42] Lynch S. : Limit cycles in generalized Liénard equations. Applied Math.
Letters, 8:1517, 1995.
[43] Lynch S. : Generalized quadratic Liénard equations. Applied. Math.
Letters, 11:710, 1998.
[44] Lynch S. : Generalized cubic Liénard equations. Applied Math. Letters,12:16, 1999.
[45] Lynch S. and Christopher C. : Limit cycles in highly non-lineardierential equations. J. Sound Vib, 224:505517, 1999.
[46] Markus L. : Global structure of ordinary dierential equations in theplane. Tran. Amer. Math. Soc., 76:127148, 1954.
[47] Melnikov V. K. : On the stability of the center for time periodicperturbations. Trans. Moscow Math. Soc., 12:157, 1963.
[48] Neukirch S. : Les attracteurs des systèmes dynamiques dissipatifs de
Lorenz et de Liénard : nombre, forme et localisation. Thèse de doctorat,Université Paris 6, 98.
[49] Perko L. : Dierential equations and dynamical systems. Springer-Verlag, third édition, 2001.
[50] Perko L. M. : Bifurcation of limit cycles : Geometric theory. Proc.
Amer. Math. Soc., 114:225236, 1992.
[51] Petrovskii I.G. and Landis E.M. : On the number of limit cycle ofthe equation dy/dx = P (x, y)/Q(x, y) where P and Q are polynomials.Math. Sb. N.S, 43:149168, 1957.
[52] Poincaré H. : Mémoire sur les courbes dénies par les équations dié-
rentielles, volume 1-6 of ×uvre 1. Paris : Gauthier-villar, 1880.
[53] Rychkov G. S. : The maximum number of limit cycle of the systemx = y − a1x
3 − a2x5, y = −x is equal to two. Dierential Equations,
11:380391, 1975.
[54] Sanders J. A. and Verhulst F. : Averaging methods in nonlinear
dynamical systems, volume 59. Springer-Verlag, 1985.
[55] Smale S. : Mathematical Problems for the next century. Mathematical
Intelligencer, 20:715, 1998.
[56] Van Der Berg G.J.B. and Peletier L.A. and Troy W.C. : Globalbranches of multi-bump periodic solutions of the Swift-Hohenberg. Arch.Ration. Mech. Anal, 158:91153, 2001.
[57] Verhulst F. : Nonlinear dierential equations and dynamical systems.Springer-Verlag, second édition, 1991.
75
Bibliographie
[58] Wang Y. and Jing Z. : Cubic Liénard equations with quadratic dam-ping(II). Acta Mathematicae Applicatae Sinica, 18:103116, 2002.
[59] Yanqian Y. : Theory of limit cycles, volume 66. Translations of Maths.Monographs. Providence, RI : AMS., 1986.
[60] Yu P. and Han M. : Limit cycles in generalized Liénard systems.Chaos, Solitons and Fractals, 30:10481068, 2006.
[61] Zhang Z. : On the existence of exactly two limit cycles for Liénardequation. Acta Math. Sinica, 24:710716, 1981.
[62] Zoladek H. : Eleven small limit cycles in a cubic vector eld. Nonli-
nearity, 8:843860, 1995.
[63] Zuppa C. : Ordre of cyclicity of the singular point of Liénard polynomialvector elds. Bol. Soc. Brasil. Mat., 12(2):105111, 1981.
76

Bibliographie
77