Cycle 5: Etude et modélisation des chaines de … · Comment piloter ces machines en couple et en...
11
Modélisation de la machine synchrone page 1/11 Cycle 5: Etude et modélisation des chaines de conversion électromécanique Chapitre 2 : Machines synchrones (moteur et alternateur) Variation de vitesse (onduleur) Au sein d’un système complexe pluri-technologique, l’ingénieur doit être capable de caractériser l’association convertisseur statique et machine en vue de sa modélisation puis sa conception. Quels sont les modèles des machines CC, synchrone et asynchrone ? Comment piloter ces machines en couple et en vitesse ? B. Modéliser - Caractériser le comportement de l’association convertisseur-machine et charge - Caractériser la réversibilité de la chaine d’énergie - Identifier les quadrants de fonctionnement d’une chaine d’énergie - Définir les modèles de connaissance et comportement des machines à CC, asynchrone et synchrone Moteur synchrone 10W
Transcript of Cycle 5: Etude et modélisation des chaines de … · Comment piloter ces machines en couple et en...
Modélisation de la machine synchrone page 1/11
Cycle 5: Etude et modélisation des chaines de conversion
électromécanique
Chapitre 2 : Machines synchrones (moteur et alternateur)
Variation de vitesse (onduleur)
Au sein d’un système complexe pluri-technologique, l’ingénieur doit être capable de caractériser l’association convertisseur statique et machine en vue de sa modélisation puis sa conception. Quels sont les modèles des machines CC, synchrone et asynchrone ? Comment piloter ces machines en couple et en vitesse ?
B. Modéliser - Caractériser le comportement de l’association convertisseur-machine et charge - Caractériser la réversibilité de la chaine d’énergie - Identifier les quadrants de fonctionnement d’une chaine d’énergie - Définir les modèles de connaissance et comportement des machines à CC, asynchrone et synchrone
Moteur synchrone 10W

CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 2/11
1. Machines synchrones : ne pas confondre moteur et alternateur …
Une machine synchrone est une machine électrique :
soit produisant un courant électrique dont la fréquence est déterminée par la vitesse de rotation du rotor :
fonctionnement en « génératrice ». L'alternateur est une application particulière de la machine synchrone
Alternateur centrale thermique 200MW
Rem 1 : La machine synchrone est capable de travailler dans les 4 quadrants électriques.
Véhicule, fonction globale de la chaîne : " Charger la batterie "
Moteur thermique(véhicule)
Poulie-courroie Alternateur Régulateur Batterie
Energie mécanique
Energie mécanique
Energie électrique
Energie électrique
Centrale hydroélectrique, fonction globale de la chaîne : " Produire de l'énergie hydro-électrique "
Turbine Alternateur Réseau
Energie mécanique
Energie hydraulique
(chute d'eau)Energie
électrique
CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 3/11
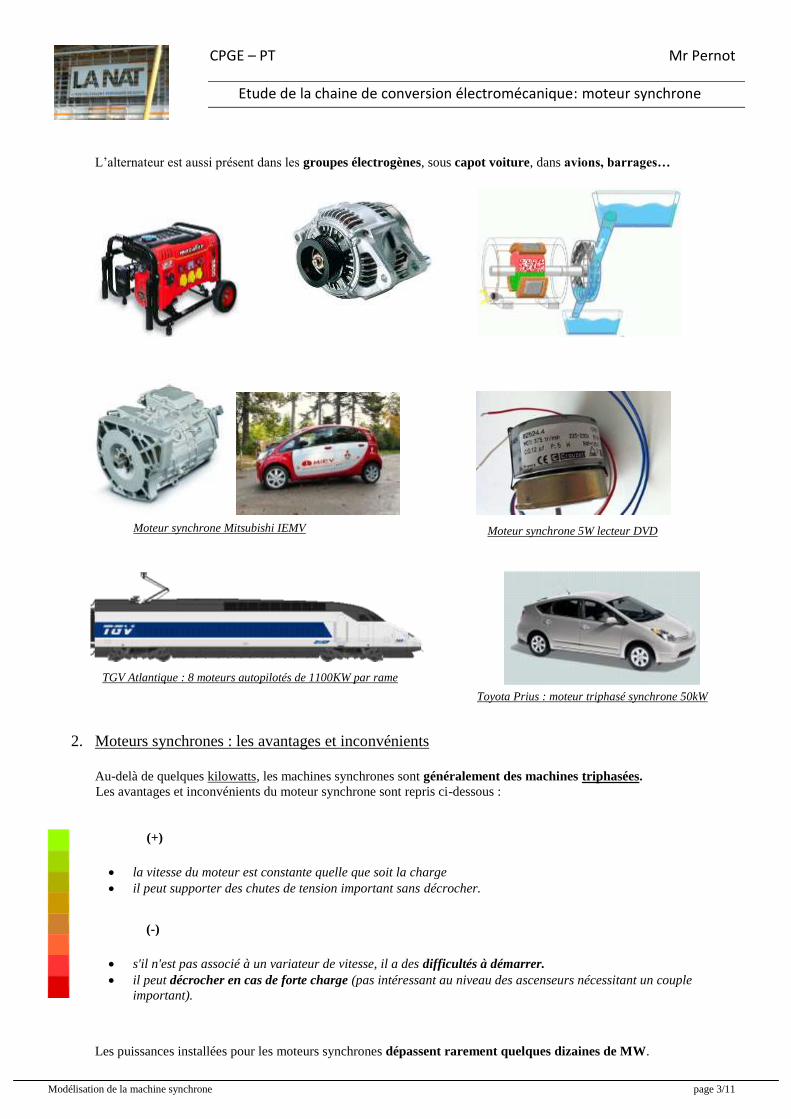
L’alternateur est aussi présent dans les groupes électrogènes, sous capot voiture, dans avions, barrages…
2. Moteurs synchrones : les avantages et inconvénients
Au-delà de quelques kilowatts, les machines synchrones sont généralement des machines triphasées.
Les avantages et inconvénients du moteur synchrone sont repris ci-dessous :
(+)
la vitesse du moteur est constante quelle que soit la charge
il peut supporter des chutes de tension important sans décrocher.
(-)
s'il n'est pas associé à un variateur de vitesse, il a des difficultés à démarrer.
il peut décrocher en cas de forte charge (pas intéressant au niveau des ascenseurs nécessitant un couple
important).
Les puissances installées pour les moteurs synchrones dépassent rarement quelques dizaines de MW.
Moteur synchrone Mitsubishi IEMV Moteur synchrone 5W lecteur DVD
TGV Atlantique : 8 moteurs autopilotés de 1100KW par rame Toyota Prius : moteur triphasé synchrone 50kW
CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 4/11
Pendant longtemps, ce moteur fût relativement peu utilisé en raison de sa difficulté à réguler sa vitesse. Ce problème est
maintenant résolu grâce au progrès de l'électronique de puissance et des ONDULEURS qui lui sont associés.
Les moteurs synchrones sont très souvent employés en robotique et dans les machines à commande numérique
lorsqu'il est nécessaire de contrôler précisément leur vitesse de rotation. Ils prennent la place des moteurs à courant
continu car leur réalisation est plus simple.
• Excellente fiabilité.
• Excellent rendement (> 90%).
• Faible niveau sonore.
• Couple à l'arrêt (utilisation en positionnement).
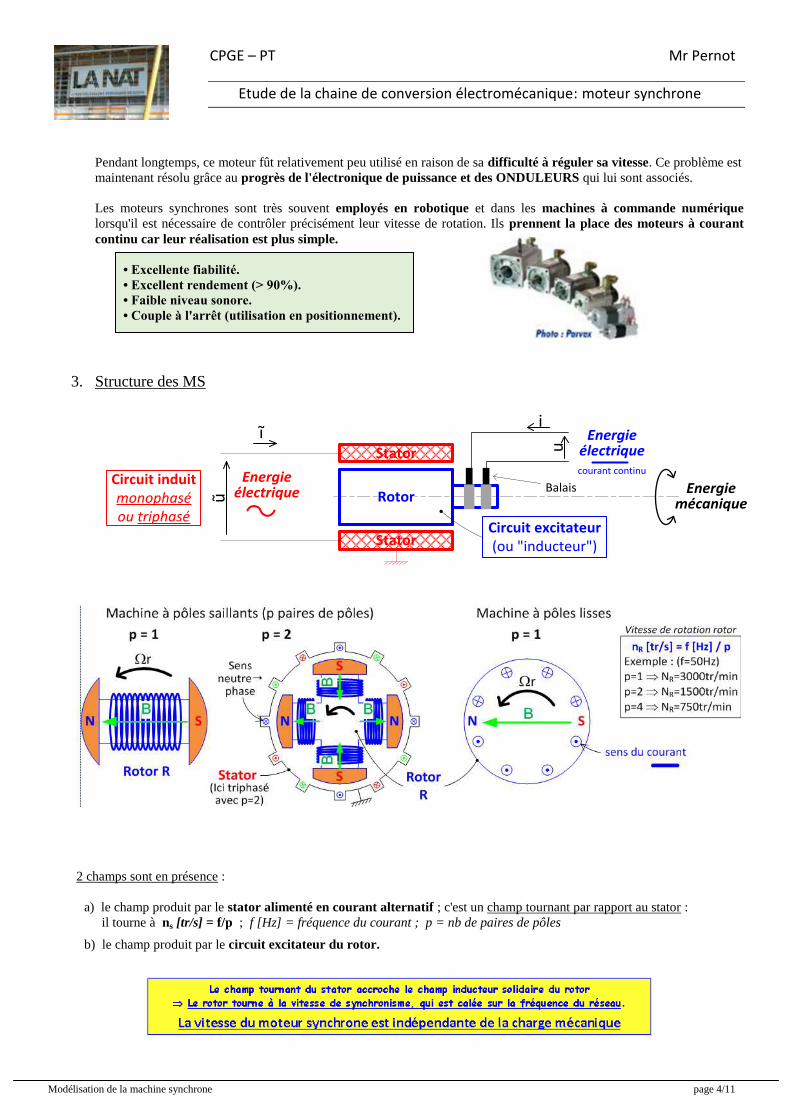
3. Structure des MS
2 champs sont en présence :
a) le champ produit par le stator alimenté en courant alternatif ; c'est un champ tournant par rapport au stator :
il tourne à ns [tr/s] = f/p ; f [Hz] = fréquence du courant ; p = nb de paires de pôles
b) le champ produit par le circuit excitateur du rotor.
Balais
Circuit excitateur (ou "inducteur")
Circuit induitmonophaséou triphasé
Rotor
Stator
Stator
courant continu
Energie électriqueu
i
ũ
Energie électrique Energie
mécanique

CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 5/11
Particularités du ROTOR
Il se compose essentiellement d'une succession de pôles Nord et Sud intercalés sous forme d'aimants permanents
ou de bobines d'exitation parcourues par un courant continu. On distingue donc deux types de moteurs :
à aimants permanents,
à rotor bobinés.
Rotor à aimant permanent
Ce sont des moteurs qui peuvent accepter des courants de surcharge importants pour
démarrer rapidement. Associés à des variateurs de vitesse électronique, ils trouvent leur
place dans certaines applications de motorisation d'ascenseurs lorsque l'on cherche une
certaine compacité et une accélération rapide (immeuble de grande hauteur par exemple).
Nb : on verra plus tard la particularité du moteur synchrone à aimants permanents autopiloté = BRUSHLESS
Rotor bobiné
Ce type de machines est réversible car elles peuvent fonctionner en régime moteur comme en régime alternateur. Pour
les moyennes et grosses puissances, les moteurs synchrones à rotor bobiné, associé avec un variateur de vitesse, sont
des machines performantes.
Comme le montre la figure ci-dessous, le rotor est composé d'un empilement de disques ferro-magnétiques. Comme
dans le stator du moteur, des enroulements sont logés dans des encoches pratiquées sur le rotor et reliés
électriquement aux bagues de bout d'arbre. L'alimentation en courant continu s'effectue via l'ensemble bagues-
balais.
4. Fonctionnement
Voir GDA : Guide des Automatismes (animations)
5. Symboles
Moteur synchrone à rotor bobiné Renault Zoé – 70kW

CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 6/11
6. Schéma monophasé équivalent ramené au stator
Le modèle s'applique aux machines à aimants en surface et à celles à rotor bobiné à pôles lisses. Les pertes joules et
ferromagnétiques sont négligées, toutes les grandeurs sont supposées sinusoïdales.
6.1. Expression de la fém E induite par phase
On peut écrire : E = Ev = K.Ф. Ω idem MCC
Dans le cas d’un moteur Brushless, ou d’un alternateur à aimants
permanents, le flux Ф est constant, la fém induite sera donc
proportionnelle à la vitesse de rotation :
E = Ev = k. Ω
6.2. Modèle équivalent

CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 7/11
7. Bilan des puissances
8. Démarrage des moteurs synchrones
Le principal inconvénient des moteurs synchrones vient de la difficulté de les démarrer. En effet, ces moteurs ne
possèdent pas de couple de démarrage et le champ statorique tournant qui s'établit à la mise sous tension du moteur a une
vitesse de rotation bien trop grande pour que le champ magnétique du rotor s'y accroche.
La méthode actuelle permettant de pallier ce problème :
• Moteur synchrone autopiloté (ou moteur autosynchrone ou moteur BRUSHLESS)
L’autopilotage est une réponse apportée au problème de
démarrage :
Un détecteur de position (résolver ou codeur
numérique) est associé au moteur. Il transmet à tout
moment la position exacte du rotor à un variateur
électronique qui alimente le stator de façon optimale.
Bien souvent les codeurs sont directement intégrés au
stator du MS à la construction de celui-ci comme pour
les moteurs BRUSHLESS (cf 10.)
9. Variation de vitesse : onduleur
Le variateur fait varier la vitesse du moteur synchrone, comme pour le moteur asynchrone, il fait varier la fréquence
d’alimentation du stator en fabriquant un signal MLI triphasé.
CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 8/11
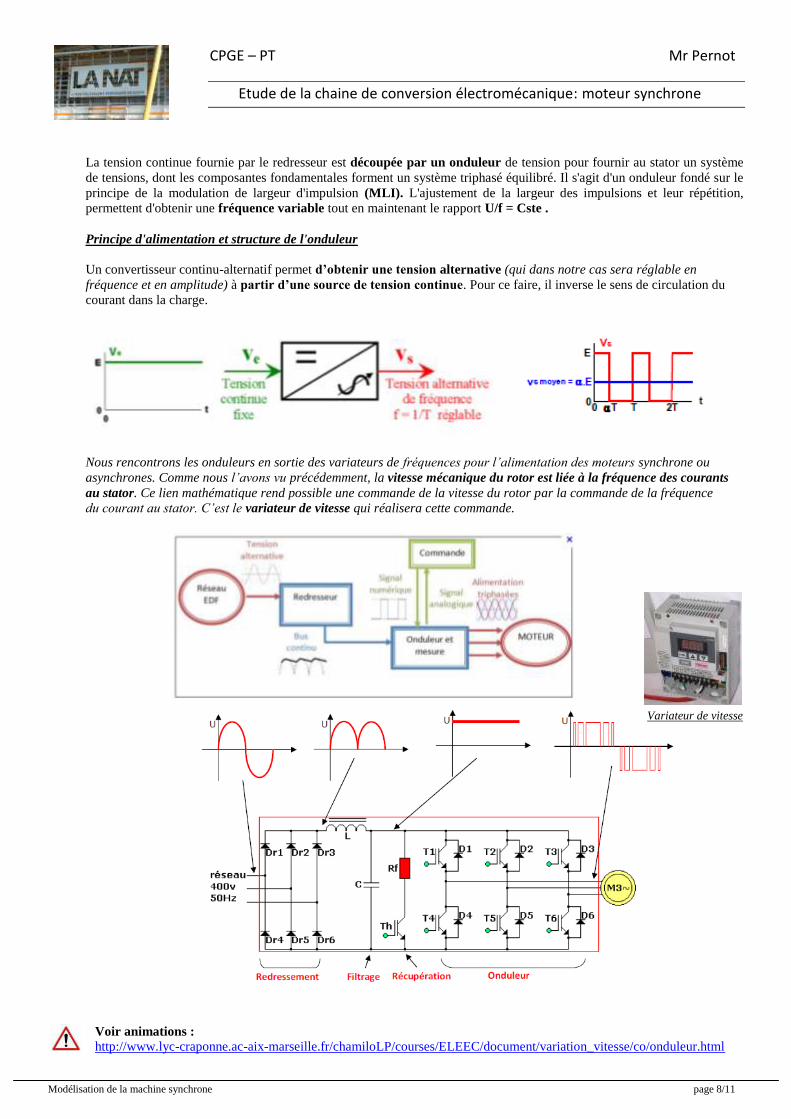
La tension continue fournie par le redresseur est découpée par un onduleur de tension pour fournir au stator un système
de tensions, dont les composantes fondamentales forment un système triphasé équilibré. Il s'agit d'un onduleur fondé sur le
principe de la modulation de largeur d'impulsion (MLI). L'ajustement de la largeur des impulsions et leur répétition,
permettent d'obtenir une fréquence variable tout en maintenant le rapport U/f = Cste .
Principe d'alimentation et structure de l'onduleur
Un convertisseur continu-alternatif permet d’obtenir une tension alternative (qui dans notre cas sera réglable en
fréquence et en amplitude) à partir d’une source de tension continue. Pour ce faire, il inverse le sens de circulation du
courant dans la charge.
Nous rencontrons les onduleurs en sortie des variateurs de fréquences pour l’alimentation des moteurs synchrone ou
asynchrones. Comme nous l’avons vu précédemment, la vitesse mécanique du rotor est liée à la fréquence des courants
au stator. Ce lien mathématique rend possible une commande de la vitesse du rotor par la commande de la fréquence
du courant au stator. C’est le variateur de vitesse qui réalisera cette commande.
Voir animations :
http://www.lyc-craponne.ac-aix-marseille.fr/chamiloLP/courses/ELEEC/document/variation_vitesse/co/onduleur.html
Variateur de vitesse
CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 9/11
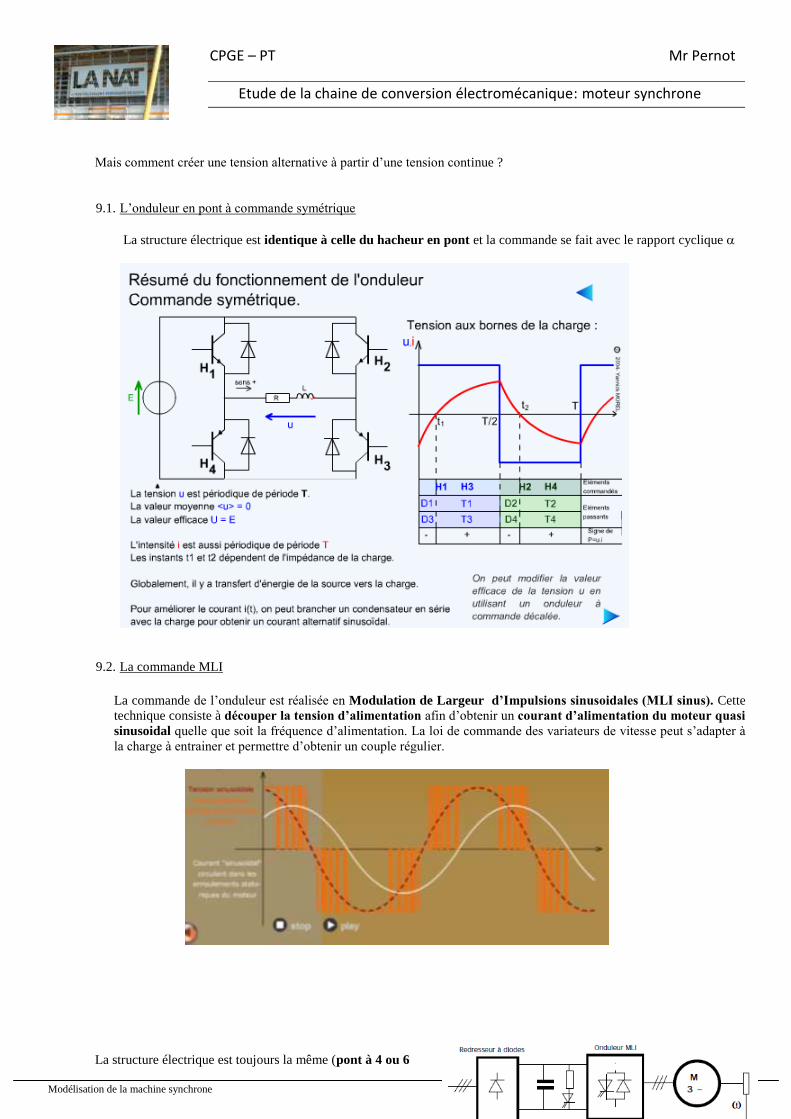
Mais comment créer une tension alternative à partir d’une tension continue ?
9.1. L’onduleur en pont à commande symétrique
La structure électrique est identique à celle du hacheur en pont et la commande se fait avec le rapport cyclique
9.2. La commande MLI
La commande de l’onduleur est réalisée en Modulation de Largeur d’Impulsions sinusoidales (MLI sinus). Cette
technique consiste à découper la tension d’alimentation afin d’obtenir un courant d’alimentation du moteur quasi
sinusoidal quelle que soit la fréquence d’alimentation. La loi de commande des variateurs de vitesse peut s’adapter à
la charge à entrainer et permettre d’obtenir un couple régulier.
La structure électrique est toujours la même (pont à 4 ou 6
CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 10/11
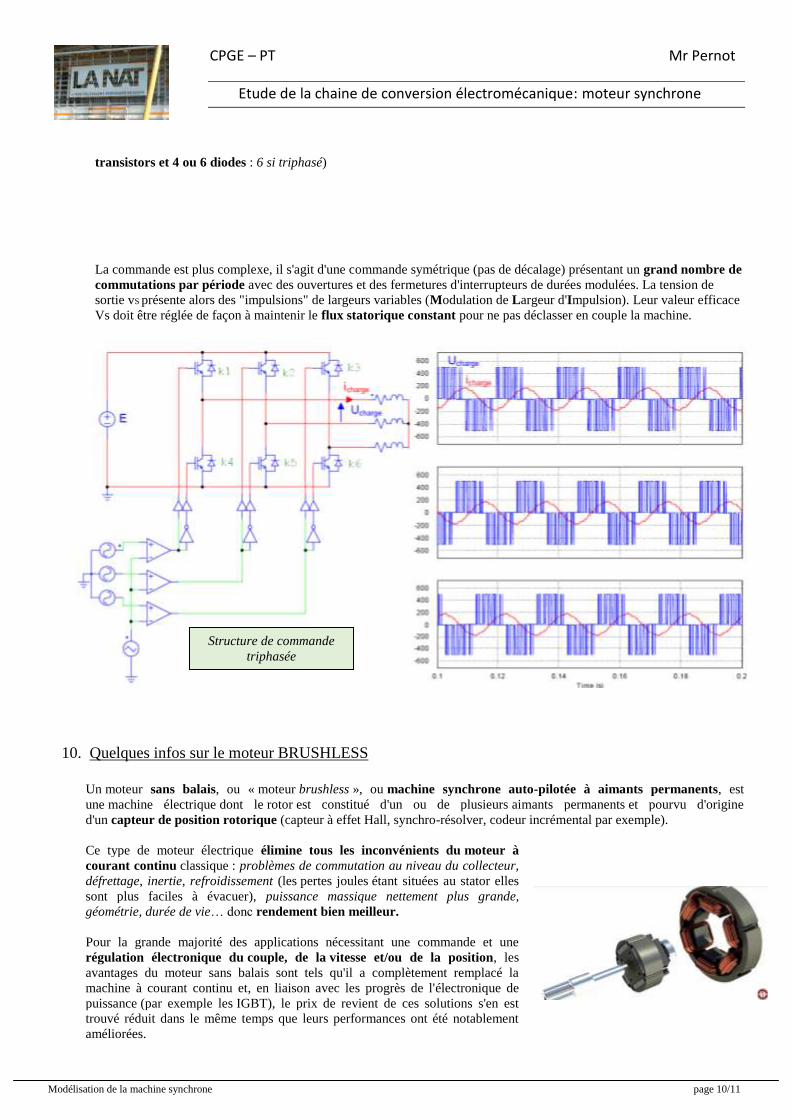
transistors et 4 ou 6 diodes : 6 si triphasé)
La commande est plus complexe, il s'agit d'une commande symétrique (pas de décalage) présentant un grand nombre de
commutations par période avec des ouvertures et des fermetures d'interrupteurs de durées modulées. La tension de
sortie vS présente alors des "impulsions" de largeurs variables (Modulation de Largeur d'Impulsion). Leur valeur efficace
Vs doit être réglée de façon à maintenir le flux statorique constant pour ne pas déclasser en couple la machine.
10. Quelques infos sur le moteur BRUSHLESS
Un moteur sans balais, ou « moteur brushless », ou machine synchrone auto-pilotée à aimants permanents, est
une machine électrique dont le rotor est constitué d'un ou de plusieurs aimants permanents et pourvu d'origine
d'un capteur de position rotorique (capteur à effet Hall, synchro-résolver, codeur incrémental par exemple).
Ce type de moteur électrique élimine tous les inconvénients du moteur à
courant continu classique : problèmes de commutation au niveau du collecteur,
défrettage, inertie, refroidissement (les pertes joules étant situées au stator elles
sont plus faciles à évacuer), puissance massique nettement plus grande,
géométrie, durée de vie… donc rendement bien meilleur.
Pour la grande majorité des applications nécessitant une commande et une
régulation électronique du couple, de la vitesse et/ou de la position, les
avantages du moteur sans balais sont tels qu'il a complètement remplacé la
machine à courant continu et, en liaison avec les progrès de l'électronique de
puissance (par exemple les IGBT), le prix de revient de ces solutions s'en est
trouvé réduit dans le même temps que leurs performances ont été notablement
améliorées.
Structure de commande
triphasée
CPGE – PT Mr Pernot
Etude de la chaine de conversion électromécanique: moteur synchrone
Modélisation de la machine synchrone page 11/11
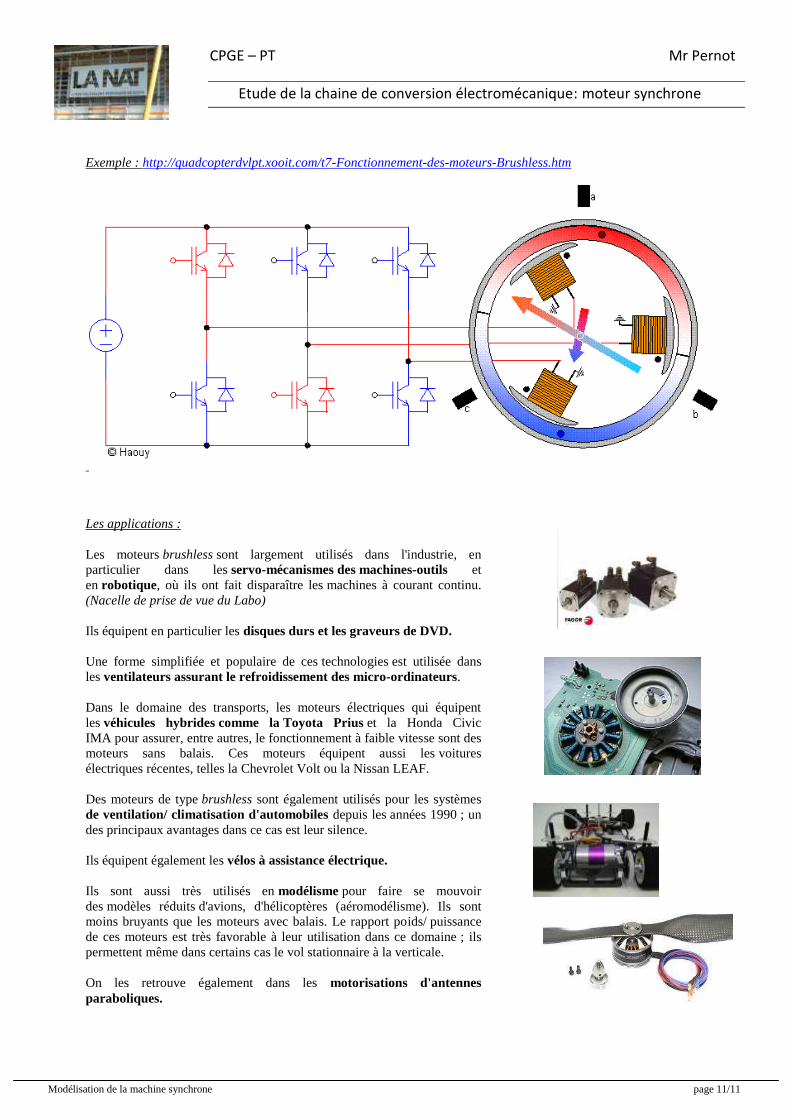
Exemple : http://quadcopterdvlpt.xooit.com/t7-Fonctionnement-des-moteurs-Brushless.htm
Les applications :
Les moteurs brushless sont largement utilisés dans l'industrie, en
particulier dans les servo-mécanismes des machines-outils et
en robotique, où ils ont fait disparaître les machines à courant continu.
(Nacelle de prise de vue du Labo)
Ils équipent en particulier les disques durs et les graveurs de DVD.
Une forme simplifiée et populaire de ces technologies est utilisée dans
les ventilateurs assurant le refroidissement des micro-ordinateurs.
Dans le domaine des transports, les moteurs électriques qui équipent
les véhicules hybrides comme la Toyota Prius et la Honda Civic
IMA pour assurer, entre autres, le fonctionnement à faible vitesse sont des
moteurs sans balais. Ces moteurs équipent aussi les voitures
électriques récentes, telles la Chevrolet Volt ou la Nissan LEAF.
Des moteurs de type brushless sont également utilisés pour les systèmes
de ventilation/ climatisation d'automobiles depuis les années 1990 ; un
des principaux avantages dans ce cas est leur silence.
Ils équipent également les vélos à assistance électrique.
Ils sont aussi très utilisés en modélisme pour faire se mouvoir
des modèles réduits d'avions, d'hélicoptères (aéromodélisme). Ils sont
moins bruyants que les moteurs avec balais. Le rapport poids/ puissance
de ces moteurs est très favorable à leur utilisation dans ce domaine ; ils
permettent même dans certains cas le vol stationnaire à la verticale.
On les retrouve également dans les motorisations d'antennes
paraboliques.