C:/Vincent/rapport de stage/Stage M2/rapport vincent … · Laboratoire de physique de l’ENS Lyon...
22
Master « Sciences de la Matière » École Normale Supérieure de Lyon Université Claude Bernard Lyon1 Stage 2008/2009 GRENARD,Vincent M2 DSM Option Physique ——————————————————– Dynamique de gels attractifs : structuration par le cisaillement de gels de noir de carbone confinés ——————————————————– Résumé : L’objectif de ce stage était d’étudier la structuration sous forme de rouleaux lors du cisaillement dans des gels de noir de carbone confinés sur des tailles de l’ordre de la centaine de micromètres. Cette structuration a déjà été observée dans un rhéomètre rotatif en géométrie plan-plan. Nous avons étudié ces rouleaux avec plusieurs géométries : rhéomètre rotatif en plan-plan et en cône-plan, puis dans un dispositif de translation plan-plan. Nous avons mesuré leur taille, leur périodicité ainsi que leur vitesse et la manière dont ils évoluent avec la hauteur de confinement. Mots-clés : Gels attractifs, structuration, noir de carbone, rhéologie Laboratoire de physique de l’ENS Lyon Stage du 6 avril au 31 juillet 2009 Sous la direction de Sébastien MANNEVILLE et Nicolas TABERLET I
Transcript of C:/Vincent/rapport de stage/Stage M2/rapport vincent … · Laboratoire de physique de l’ENS Lyon...
Master
« Sciences de la Matière »
École Normale Supérieure de Lyon
Université Claude Bernard Lyon1
Stage 2008/2009GRENARD,Vincent
M2 DSM
Option Physique
——————————————————–Dynamique de gels attractifs :
structuration par le cisaillement degels de noir de carbone confinés
——————————————————–
Résumé :L’objectif de ce stage était d’étudier la structuration sous forme de rouleaux lors du cisaillement dansdes gels de noir de carbone confinés sur des tailles de l’ordre de la centaine de micromètres. Cette structuration adéjà été observée dans un rhéomètre rotatif en géométrie plan-plan. Nous avons étudié ces rouleaux avec plusieursgéométries : rhéomètre rotatif en plan-plan et en cône-plan, puis dans un dispositif de translation plan-plan. Nousavons mesuré leur taille, leur périodicité ainsi que leur vitesse et la manière dont ils évoluent avec la hauteur deconfinement.
Mots-clés :Gels attractifs, structuration, noir de carbone, rhéologie
Laboratoire de physique de l’ENS Lyon
Stage du 6 avril au 31 juillet 2009Sous la direction de
Sébastien MANNEVILLE et Nicolas TABERLET
I

Table des matières
Introduction 1
1 Le système étudié : un gel de particules de noir de carbone 21.1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 21.2 Préparation des gels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 21.3 Rhéologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 2
1.3.1 Rhéologie non-linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 21.3.2 Rhéologie linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 31.3.3 Bilan et protocole retenu pour la suite des expériences . . . . . . . . . .. . . . . . . . 4
2 Étude à l’aide d’un rhéomètre en géométrie plan-plan 52.1 Vitesse de déplacement des structures . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 62.2 Étude de la longueur d’onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 72.3 Disparition des structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 82.4 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 9
3 Étude à l’aide d’un rhéomètre en géométrie cône-plan 103.1 Longueur d’onde en cône-plan . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 103.2 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 11
4 Étude dans une cellule de cisaillement en translation plan-plan 124.1 Présentation du système expérimental . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 124.2 Étalonnage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 13
4.2.1 Conversion tension-déflexion . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 134.2.2 Conversion déflexion-force . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 13
4.3 Mesure de force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 154.4 Optique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 16
4.4.1 Dynamique de structuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 164.4.2 Taille des structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 16
4.5 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 18
5 Perspectives 185.1 Avec le rhéomètre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 185.2 En translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 18
Conclusion 19
II
Introduction
La rhéologie est l’étude de la déformation et de l’écoulement de la matière, eten particulier des fluidescomplexes [1]. Ces fluides peuvent avoir différentes propriétés : ils peuvent être par exemple rhéofluidifiants (laviscosité diminue lorsque l’on cisaille plus le fluide) ou à l’inverse rhéoépaississants. Ils peuvent aussi présenterune contrainte seuil en dessous de laquelle ils ne s’écoulent pas (comportement solide) et au dessus de laquelleils coulent (comportement liquide).
Cette grande variété de comportements permet d’expliquer des phénomènesqui resteraient incompris si on selimitait à l’approximation d’un fluide newtonien de viscosité constante, sans histoire et sans seuil. On peut citerpar exemple le fait que la pâte d’un gâteau monte le long du fouet dans un batteur électrique (effet Weissenberg [1,2]), la dynamique intermittente d’un gaz s’échappant du magma dans les volcans [3] ou encore la présence d’unepointe en bas d’une bulle qui remonte dans du shampoing [4].
Le comportement complexe des fluides peut être dû à la présence de consituants de petite taille dans un liquidesimple comme par exemple pour les suspensions colloïdales, c’est à dire des liquides dans lesquels de petitesparticules de taille nanométrique ou micrométrique interagissent. De telles suspensions présentent une grandevariété de comportement lorsque l’on fait varier la force de l’interaction ousa portée, la température ou encorela concentration en particules [5, 6]. Dans ce genre de suspension, lesvariations rhéologiques macroscopiquespeuvent être accompagnées de changements de la microstructure, c’est-à-dire de l’organisation des particules àl’échelle mésoscopique [1, 7].
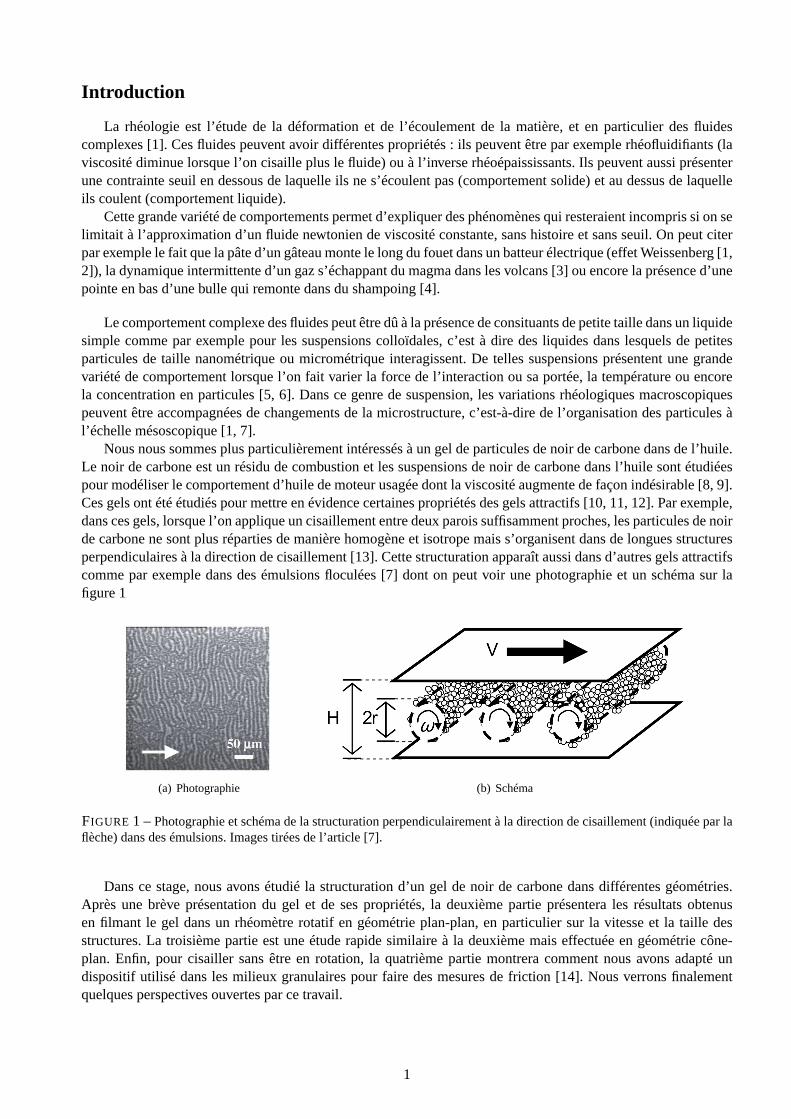
Nous nous sommes plus particulièrement intéressés à un gel de particules denoir de carbone dans de l’huile.Le noir de carbone est un résidu de combustion et les suspensions de noir de carbone dans l’huile sont étudiéespour modéliser le comportement d’huile de moteur usagée dont la viscosité augmente de façon indésirable [8, 9].Ces gels ont été étudiés pour mettre en évidence certaines propriétés des gels attractifs [10, 11, 12]. Par exemple,dans ces gels, lorsque l’on applique un cisaillement entre deux parois suffisamment proches, les particules de noirde carbone ne sont plus réparties de manière homogène et isotrope mais s’organisent dans de longues structuresperpendiculaires à la direction de cisaillement [13]. Cette structuration apparaît aussi dans d’autres gels attractifscomme par exemple dans des émulsions floculées [7] dont on peut voir une photographie et un schéma sur lafigure 1
(a) Photographie (b) Schéma
FIGURE 1 –Photographie et schéma de la structuration perpendiculairement à la direction de cisaillement (indiquée par laflèche) dans des émulsions. Images tirées de l’article [7].
Dans ce stage, nous avons étudié la structuration d’un gel de noir de carbone dans différentes géométries.Après une brève présentation du gel et de ses propriétés, la deuxième partie présentera les résultats obtenusen filmant le gel dans un rhéomètre rotatif en géométrie plan-plan, en particulier sur la vitesse et la taille desstructures. La troisième partie est une étude rapide similaire à la deuxième mais effectuée en géométrie cône-plan. Enfin, pour cisailler sans être en rotation, la quatrième partie montrera comment nous avons adapté undispositif utilisé dans les milieux granulaires pour faire des mesures de friction[14]. Nous verrons finalementquelques perspectives ouvertes par ce travail.
1

1 Le système étudié : un gel de particules de noir de carbone
1.1 Présentation
Le gel sur lequel nous avons travaillé est constitué d’un solvant (une huile minérale de viscosité vingt foissupérieure à celle de l’eau) et de particules de noir de carbone (la taille d’une particule étant de l’ordre de0,5 µm). Ces particules présentent des interactions attractives entre elles et forment des structures fractales.C’est cette structure fractale qui permet de créer des chaînes de contacts sur de grandes distances malgré uneconcentration très faible en particules (typiquement2% en masse dans notre cas), et qui donne ainsi un caratèresolide au système au repos. La densité des particules de carbone étant bien supérieure à celle de l’huile utiliséecomme solvant, un problème majeur dans ce système est la sédimentation qui peutavoir lieu rapidement lorsquele gel est cassé : on se retrouve alors avec un mélange diphasique dense en noir de carbone au fond et très diluéen haut et mesurer la rhéologie n’a alors plus beaucoup de sens.
L’huile utilisée comme solvant est transparente. À l’op-posé, les particules de noir de carbone sont noires etopaques. Ainsi, pour un gel suffisament dilué et confiné,on peut observer directement la structure du gel (fi-gure 2). On peut voir sur cette figure que le gel formeune structure fractale qui s’étend dans tout l’espace etqui lui donne un caractère solide au repos. Cette struc-ture percoléeest caractéristique d’un gel physique. Laquestion qui nous intéresse alors est de savoir quelleest l’influence d’un écoulement de cisaillement sur cettestructure.
FIGURE 2 – Photographie d’un gel de noir de carbonede concentration 2% en masse observé au microscopeentre lame et lamelle.
1.2 Préparation des gels
Les gels sont préparés en mélangeant une poudre de noir de carbone(Cabot Vulcan XC72R) et une huileminérale (SIGMA-ALDRICH Cat n 33,077-9). Une fois mélangés en secouant vivement le récipient, les gelssont soniqués pendant une heure. Dans ce type de gels, la sonication permet de casser la structure. On laisseensuite le gel reposer quelques heures.
1.3 Rhéologie
Nous avons mesuré la rhéologie de nos gels dans une géométrie de Couette (cylindres concentriques dediamètres48 et50 mm) à l’aide d’un rhéomètre MCR-301 (Anton Paar) dans une cellule en Plexiglas.
1.3.1 Rhéologie non-linéaire
Sur la figure 3 on peut voir la courbe d’écoulement, c’est à dire la contrainte nécessaire pour obtenir un tauxde cisaillement donné. Cette courbe est obtenue en augmentant progressivement le taux de cisaillement et enmesurant la contrainte régulièrement (rampe montante), puis en rediminuant letaux de cisaillement à partir dela valeur maximale obtenue (rampe descendante). Pour un fluide newtonien,on s’attend à ce que la contraintesoit simplement proportionnelle au taux de cisaillement1. Dans notre cas, on observe une petite hystérésis entrela montée et la descente, ceci vient du fait que la courbe associée à la rampe montante dépend du protocole decisaillement (nous n’avons pas cherché à étudier en détail ce phénomène). Au contraire, la courbe de descente esttrès reproductible quelle que soit l’histoire du gel. On peut aussi remarquer en extrapolant la courbe de descente
1. la viscosité est alors simplement donnée par la pente de la courbe d’écoulement
2
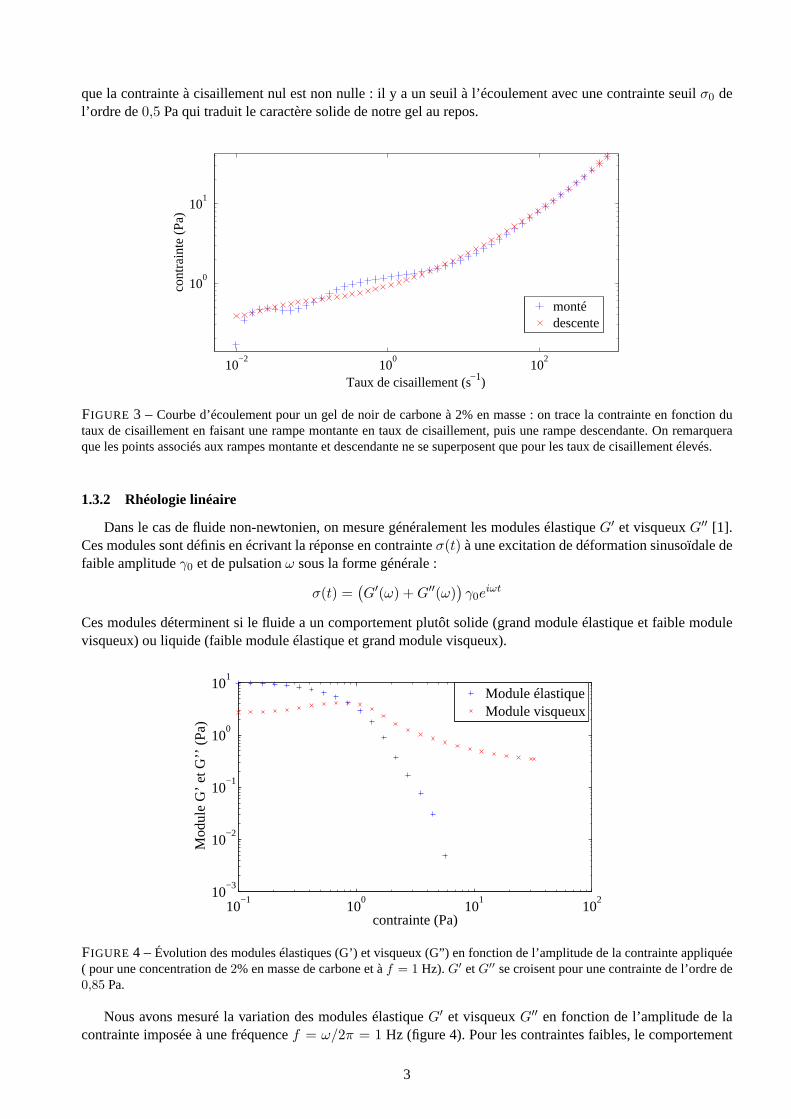
que la contrainte à cisaillement nul est non nulle : il y a un seuil à l’écoulementavec une contrainte seuilσ0 del’ordre de0,5 Pa qui traduit le caractère solide de notre gel au repos.
10−2
100
102
100
101
Taux de cisaillement (s−1)
cont
rain
te (
Pa)
montédescente
FIGURE 3 – Courbe d’écoulement pour un gel de noir de carbone à 2% en masse : on trace la contrainte en fonction dutaux de cisaillement en faisant une rampe montante en taux decisaillement, puis une rampe descendante. On remarqueraque les points associés aux rampes montante et descendante ne se superposent que pour les taux de cisaillement élevés.
1.3.2 Rhéologie linéaire
Dans le cas de fluide non-newtonien, on mesure généralement les modules élastiqueG′ et visqueuxG′′ [1].Ces modules sont définis en écrivant la réponse en contrainteσ(t) à une excitation de déformation sinusoïdale defaible amplitudeγ0 et de pulsationω sous la forme générale :
σ(t) =(
G′(ω) + G′′(ω))
γ0eiωt
Ces modules déterminent si le fluide a un comportement plutôt solide (grand module élastique et faible modulevisqueux) ou liquide (faible module élastique et grand module visqueux).
10−1
100
101
102
10−3
10−2
10−1
100
101
Mod
ule
G’ e
t G’’
(Pa)
contrainte (Pa)
Module élastiqueModule visqueux
FIGURE 4 – Évolution des modules élastiques (G’) et visqueux (G”) en fonction de l’amplitude de la contrainte appliquée( pour une concentration de2% en masse de carbone et àf = 1 Hz). G′ etG′′ se croisent pour une contrainte de l’ordre de0,85 Pa.
Nous avons mesuré la variation des modules élastiqueG′ et visqueuxG′′ en fonction de l’amplitude de lacontrainte imposée à une fréquencef = ω/2π = 1 Hz (figure 4). Pour les contraintes faibles, le comportement
3
élastique domine (G′≃ 10 Pa etG′′
≃ 3 Pa) , puis les courbes se croisent et le comportement visqueux devientprédominant (G′
≃ 10−3 Pa etG′′≃ 0,5 Pa) . Ceci confirme que le gel de noir de carbone se comporte comme un
fluide à seuil dont la contrainte seuil est environ0,85 Pa (lorsque les courbesG′ etG′′ se croisent). La contrainteseuil estimée ici est différente de celle estimée dans le cas de la courbe d’écoulement, cela vient du fait que cettemesure dépend beaucoup du protocole utilisé.
10−2
10−1
100
101
100
101
102
Mod
ule
G’ e
t G’’(
Pa)
fréquence (Hz)
Module élastiqueModule visqueux
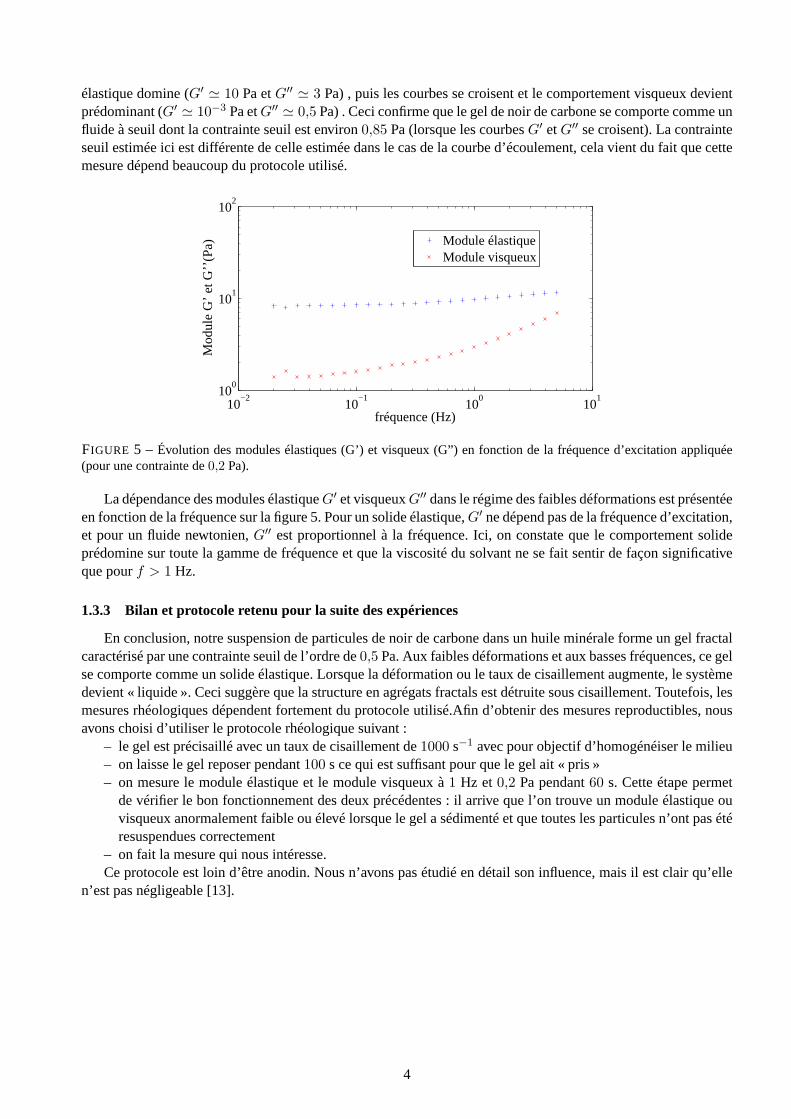
FIGURE 5 – Évolution des modules élastiques (G’) et visqueux (G”) en fonction de la fréquence d’excitation appliquée(pour une contrainte de0,2 Pa).
La dépendance des modules élastiqueG′ et visqueuxG′′ dans le régime des faibles déformations est présentéeen fonction de la fréquence sur la figure 5. Pour un solide élastique,G′ ne dépend pas de la fréquence d’excitation,et pour un fluide newtonien,G′′ est proportionnel à la fréquence. Ici, on constate que le comportement solideprédomine sur toute la gamme de fréquence et que la viscosité du solvant ne se fait sentir de façon significativeque pourf > 1 Hz.
1.3.3 Bilan et protocole retenu pour la suite des expériences
En conclusion, notre suspension de particules de noir de carbone dansun huile minérale forme un gel fractalcaractérisé par une contrainte seuil de l’ordre de0,5 Pa. Aux faibles déformations et aux basses fréquences, ce gelse comporte comme un solide élastique. Lorsque la déformation ou le taux de cisaillement augmente, le systèmedevient « liquide ». Ceci suggère que la structure en agrégats fractals est détruite sous cisaillement. Toutefois, lesmesures rhéologiques dépendent fortement du protocole utilisé.Afin d’obtenir des mesures reproductibles, nousavons choisi d’utiliser le protocole rhéologique suivant :
– le gel est précisaillé avec un taux de cisaillement de1000 s−1 avec pour objectif d’homogénéiser le milieu– on laisse le gel reposer pendant100 s ce qui est suffisant pour que le gel ait « pris »– on mesure le module élastique et le module visqueux à1 Hz et0,2 Pa pendant60 s. Cette étape permet
de vérifier le bon fonctionnement des deux précédentes : il arrive quel’on trouve un module élastique ouvisqueux anormalement faible ou élevé lorsque le gel a sédimenté et que toutes les particules n’ont pas étéresuspendues correctement
– on fait la mesure qui nous intéresse.Ce protocole est loin d’être anodin. Nous n’avons pas étudié en détail son influence, mais il est clair qu’elle
n’est pas négligeable [13].
4
2 Étude à l’aide d’un rhéomètre en géométrie plan-plan
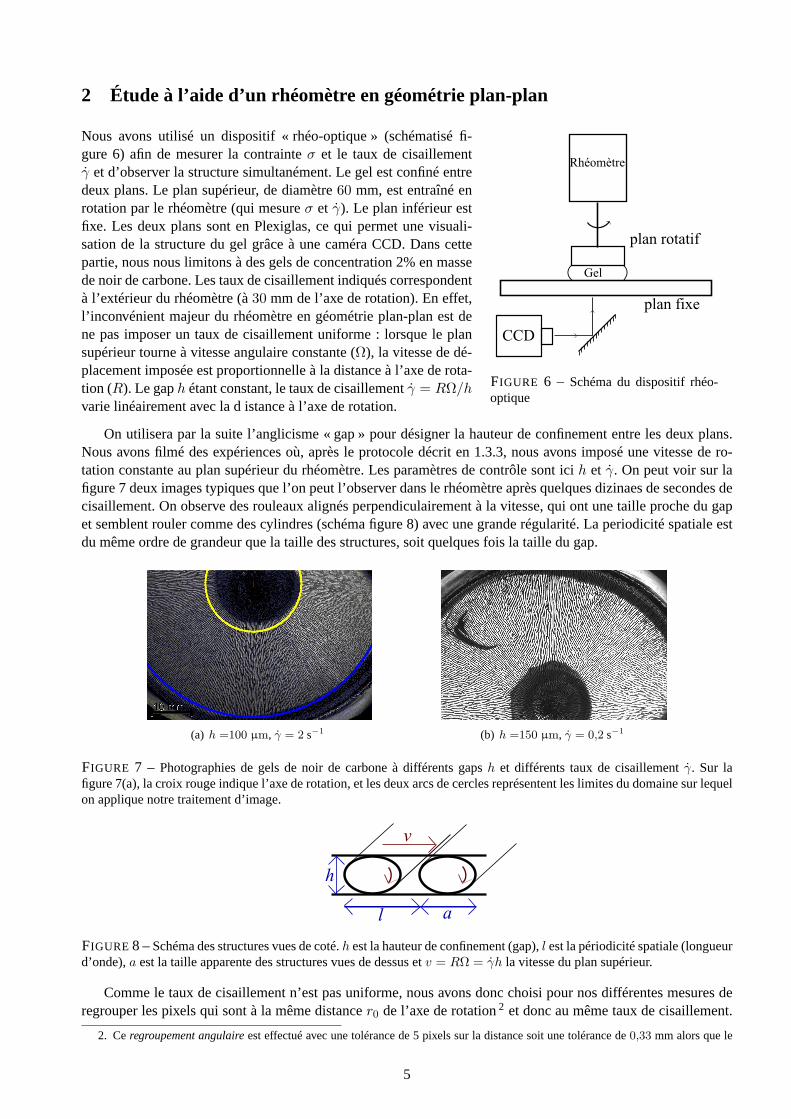
Nous avons utilisé un dispositif « rhéo-optique » (schématisé fi-gure 6) afin de mesurer la contrainteσ et le taux de cisaillementγ et d’observer la structure simultanément. Le gel est confiné entredeux plans. Le plan supérieur, de diamètre60 mm, est entraîné enrotation par le rhéomètre (qui mesureσ et γ). Le plan inférieur estfixe. Les deux plans sont en Plexiglas, ce qui permet une visuali-sation de la structure du gel grâce à une caméra CCD. Dans cettepartie, nous nous limitons à des gels de concentration 2% en massede noir de carbone. Les taux de cisaillement indiqués correspondentà l’extérieur du rhéomètre (à30 mm de l’axe de rotation). En effet,l’inconvénient majeur du rhéomètre en géométrie plan-plan est dene pas imposer un taux de cisaillement uniforme : lorsque le plansupérieur tourne à vitesse angulaire constante (Ω), la vitesse de dé-placement imposée est proportionnelle à la distance à l’axe de rota-tion (R). Le gaph étant constant, le taux de cisaillementγ = RΩ/hvarie linéairement avec la d istance à l’axe de rotation.
FIGURE 6 – Schéma du dispositif rhéo-optique
On utilisera par la suite l’anglicisme « gap » pour désigner la hauteur de confinement entre les deux plans.Nous avons filmé des expériences où, après le protocole décrit en 1.3.3,nous avons imposé une vitesse de ro-tation constante au plan supérieur du rhéomètre. Les paramètres de contrôle sont icih et γ. On peut voir sur lafigure 7 deux images typiques que l’on peut l’observer dans le rhéomètreaprès quelques dizinaes de secondes decisaillement. On observe des rouleaux alignés perpendiculairement à la vitesse, qui ont une taille proche du gapet semblent rouler comme des cylindres (schéma figure 8) avec une grande régularité. La periodicité spatiale estdu même ordre de grandeur que la taille des structures, soit quelques fois lataille du gap.
(a) h =100 µm, γ = 2 s−1 (b) h =150 µm, γ = 0,2 s−1
FIGURE 7 – Photographies de gels de noir de carbone à différents gapsh et différents taux de cisaillementγ. Sur lafigure 7(a), la croix rouge indique l’axe de rotation, et les deux arcs de cercles représentent les limites du domaine sur lequelon applique notre traitement d’image.
FIGURE 8 –Schéma des structures vues de coté.h est la hauteur de confinement (gap),l est la périodicité spatiale (longueurd’onde),a est la taille apparente des structures vues de dessus etv = RΩ = γh la vitesse du plan supérieur.
Comme le taux de cisaillement n’est pas uniforme, nous avons donc choisi pour nos différentes mesures deregrouper les pixels qui sont à la même distancer0 de l’axe de rotation2 et donc au même taux de cisaillement.
2. Ceregroupement angulaireest effectué avec une tolérance de 5 pixels sur la distance soit une tolérance de0,33 mm alors que le
5
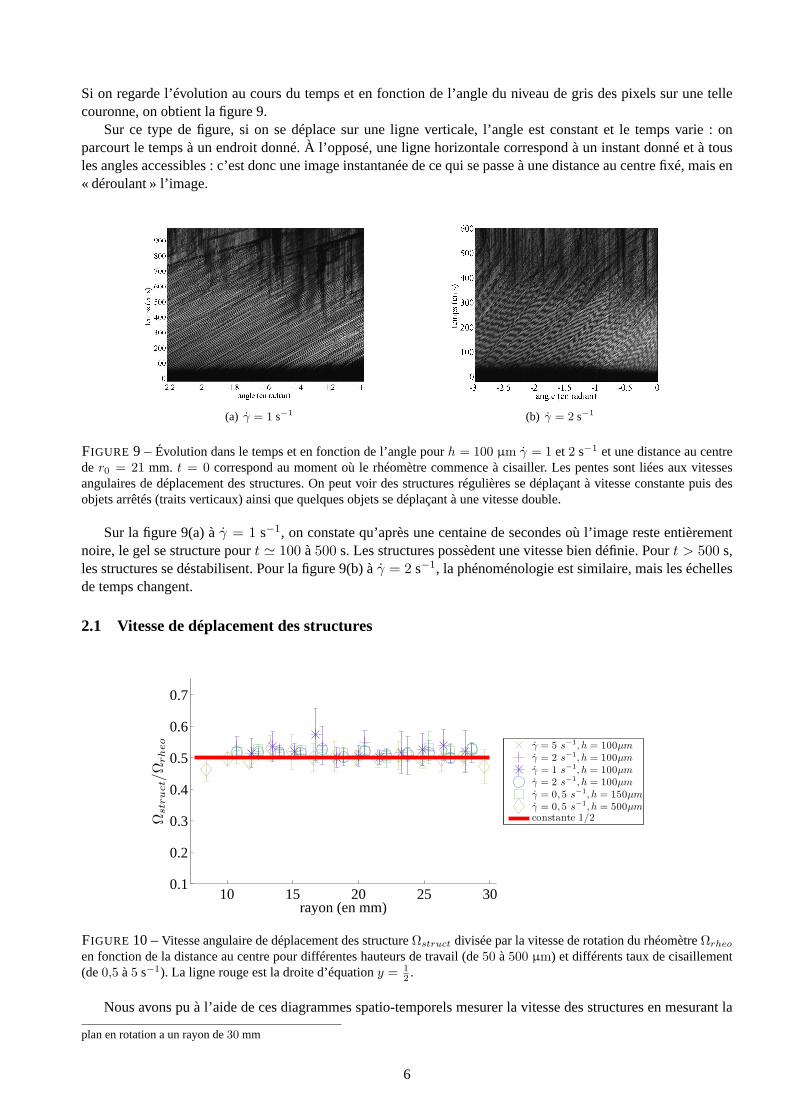
Si on regarde l’évolution au cours du temps et en fonction de l’angle du niveau de gris des pixels sur une tellecouronne, on obtient la figure 9.
Sur ce type de figure, si on se déplace sur une ligne verticale, l’angle est constant et le temps varie : onparcourt le temps à un endroit donné. À l’opposé, une ligne horizontale correspond à un instant donné et à tousles angles accessibles : c’est donc une image instantanée de ce qui se passe à une distance au centre fixé, mais en« déroulant » l’image.
(a) γ = 1 s−1 (b) γ = 2 s−1
FIGURE 9 – Évolution dans le temps et en fonction de l’angle pourh = 100 µm γ = 1 et 2 s−1 et une distance au centrede r0 = 21 mm. t = 0 correspond au moment où le rhéomètre commence à cisailler. Les pentes sont liées aux vitessesangulaires de déplacement des structures. On peut voir des structures régulières se déplaçant à vitesse constante puisdesobjets arrêtés (traits verticaux) ainsi que quelques objets se déplaçant à une vitesse double.
Sur la figure 9(a) àγ = 1 s−1, on constate qu’après une centaine de secondes où l’image reste entièrementnoire, le gel se structure pourt ≃ 100 à500 s. Les structures possèdent une vitesse bien définie. Pourt > 500 s,les structures se déstabilisent. Pour la figure 9(b) àγ = 2 s−1, la phénoménologie est similaire, mais les échellesde temps changent.
2.1 Vitesse de déplacement des structures
10 15 20 25 300.1
0.2
0.3
0.4
0.5
0.6
0.7
rayon (en mm)
Ωstru
ct/Ω
rh
eo
γ = 5 s−1, h = 100µmγ = 2 s−1, h = 100µmγ = 1 s−1, h = 100µmγ = 2 s−1, h = 100µmγ = 0, 5 s−1, h = 150µmγ = 0, 5 s−1, h = 500µmconstante 1/2
FIGURE 10 –Vitesse angulaire de déplacement des structureΩstruct divisée par la vitesse de rotation du rhéomètreΩrheo
en fonction de la distance au centre pour différentes hauteurs de travail (de50 à 500 µm) et différents taux de cisaillement(de0,5 à5 s−1). La ligne rouge est la droite d’équationy = 1
2.
Nous avons pu à l’aide de ces diagrammes spatio-temporels mesurer la vitessedes structures en mesurant la
plan en rotation a un rayon de30 mm
6
pente dans le diagramme. On peut voir sur la figure 10 que les structures tournent deux fois moins vite que lerhéomètre, et ce quelle que soit la distance au centre, le gap et le taux de cisaillement. Ceci est compatible avecl’idée de rouleaux qui roulent entre deux plans sans glisser. Aux temps longs, les objets arrêtés sont des objets quiont sédimenté et qui restent fixes par rapport au plan immobile du dessous, les objets se déplaçant à une vitessedouble de celle des structures sont donc des objets qui se déplacent à lamême vitesse que le plan du rhéomètreen mouvement, ils sont collés à la plaque du haut.
2.2 Étude de la longueur d’onde
0 200 400 600 800 1000
0.2
0.4
0.6
0.8
1
1.2
1.4
Temps (s)
Long
ueur
d’o
nde
(en
mm
)
(a) Évolution del au cours du temps à une distancer0 = 20,2 mm du centre
10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
Distance au centre (en mm)
Long
ueur
d’o
nde
(en
mm
)
(b) Évolution del en fonction de la distance au centremoyennée entre100 et400 s
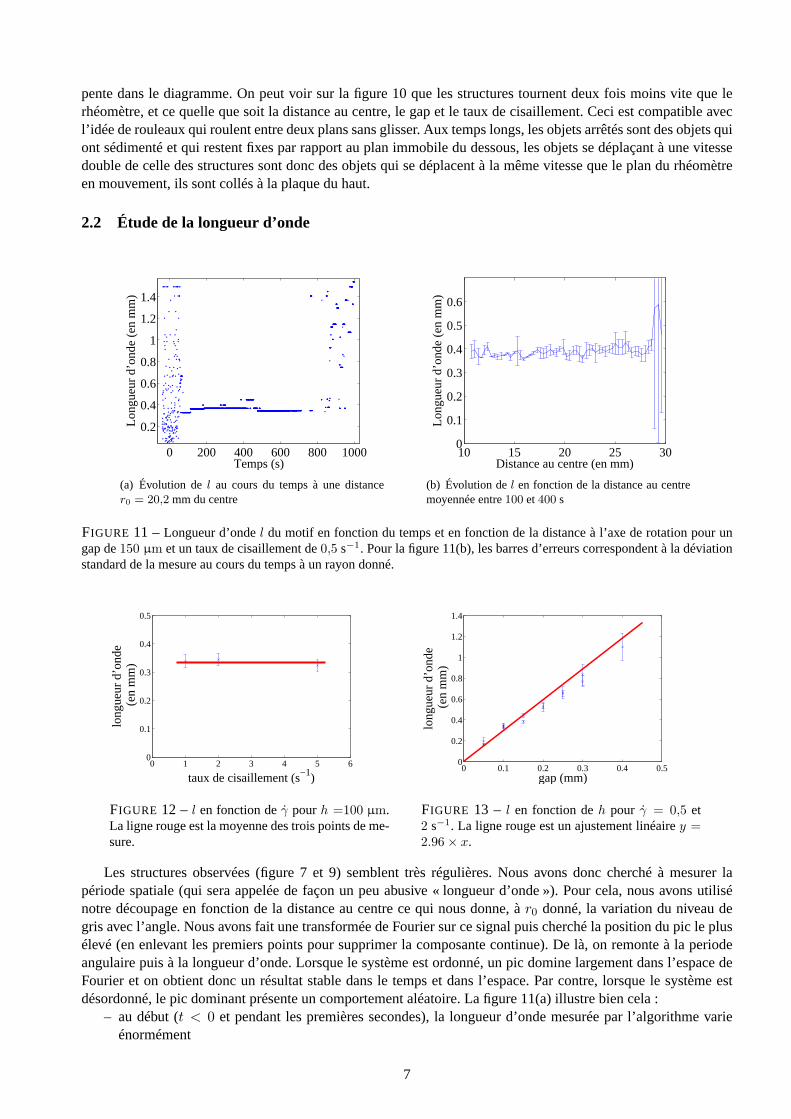
FIGURE 11 –Longueur d’ondel du motif en fonction du temps et en fonction de la distance à l’axe de rotation pour ungap de150 µm et un taux de cisaillement de0,5 s−1. Pour la figure 11(b), les barres d’erreurs correspondent à la déviationstandard de la mesure au cours du temps à un rayon donné.
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
taux de cisaillement (s−1)
long
ueur
d’o
nde
(en
mm
)
FIGURE 12 – l en fonction deγ pourh =100 µm.La ligne rouge est la moyenne des trois points de me-sure.
0 0.1 0.2 0.3 0.4 0.50
0.2
0.4
0.6
0.8
1
1.2
1.4
gap (mm)
long
ueur
d’o
nde
(en
mm
)
FIGURE 13 – l en fonction deh pour γ = 0,5 et2 s−1. La ligne rouge est un ajustement linéairey =2.96 × x.
Les structures observées (figure 7 et 9) semblent très régulières. Nous avons donc cherché à mesurer lapériode spatiale (qui sera appelée de façon un peu abusive « longueur d’onde »). Pour cela, nous avons utilisénotre découpage en fonction de la distance au centre ce qui nous donne, à r0 donné, la variation du niveau degris avec l’angle. Nous avons fait une transformée de Fourier sur ce signal puis cherché la position du pic le plusélevé (en enlevant les premiers points pour supprimer la composante continue). De là, on remonte à la periodeangulaire puis à la longueur d’onde. Lorsque le système est ordonné, un pic domine largement dans l’espace deFourier et on obtient donc un résultat stable dans le temps et dans l’espace. Par contre, lorsque le système estdésordonné, le pic dominant présente un comportement aléatoire. La figure 11(a) illustre bien cela :
– au début (t < 0 et pendant les premières secondes), la longueur d’onde mesurée parl’algorithme varieénormément
7
– une fois les structures formées, la longueur d’onde mesurée est stabledans le temps– puis les structures se cassent et la longueur d’onde mesurée redevient fluctuanteNous avons étudié dans une expérience donnée l’influence de la distance au centre et l’évolution au cours du
temps de la longueur d’onde. On peut voir sur la figure 11 que la longueurd’onde ne dépend pas de ces para-mètres (tant qu’elle est définie). Nous avons ensuite voulu voir comment la longueur d’onde dépendait du tauxde cisaillement (figure 12) et du gap (figure 13). Ces courbes suggèrent que la longueur d’onde est simplementdéterminée par la géométrie imposée au système (et éventuellement par la concentration en noir de carbone quenous n’avons pas pas eu le temps de faire varier au cours du stage).
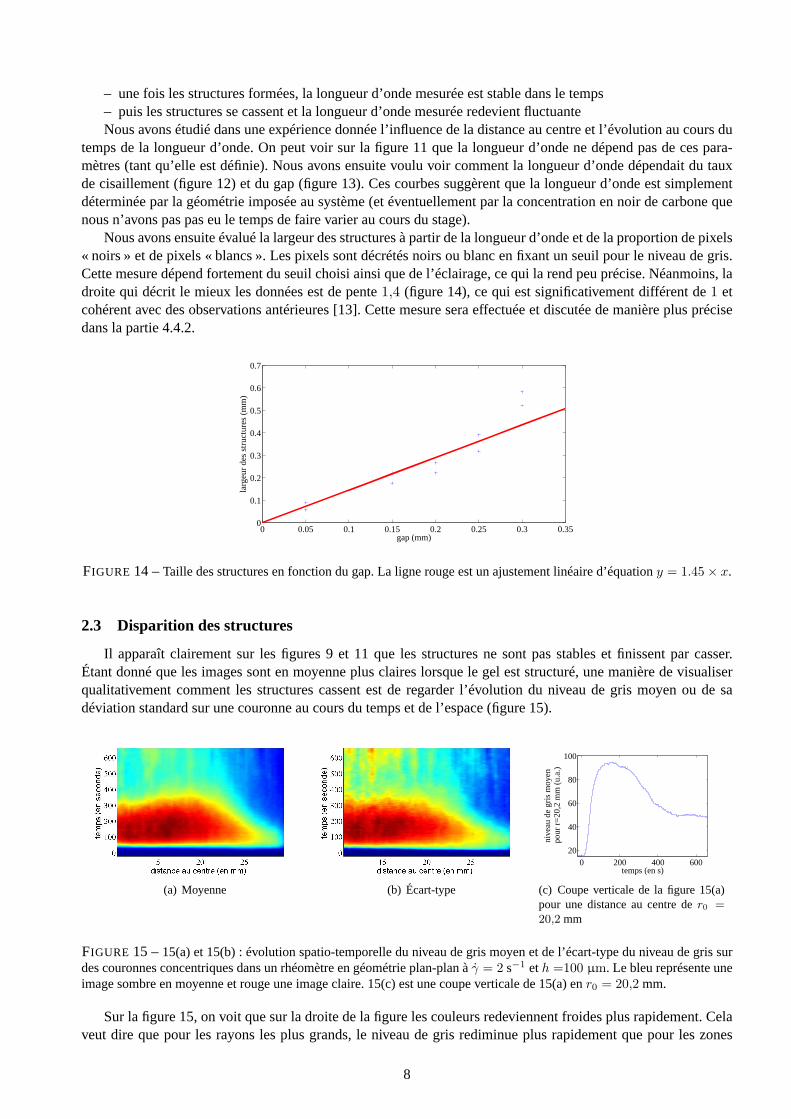
Nous avons ensuite évalué la largeur des structures à partir de la longueur d’onde et de la proportion de pixels« noirs » et de pixels « blancs ». Les pixels sont décrétés noirs ou blanc en fixant un seuil pour le niveau de gris.Cette mesure dépend fortement du seuil choisi ainsi que de l’éclairage, ce qui la rend peu précise. Néanmoins, ladroite qui décrit le mieux les données est de pente1,4 (figure 14), ce qui est significativement différent de1 etcohérent avec des observations antérieures [13]. Cette mesure seraeffectuée et discutée de manière plus précisedans la partie 4.4.2.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
gap (mm)
larg
eur
des
stru
ctur
es (
mm
)
FIGURE 14 –Taille des structures en fonction du gap. La ligne rouge est un ajustement linéaire d’équationy = 1.45 × x.
2.3 Disparition des structures
Il apparaît clairement sur les figures 9 et 11 que les structures ne sontpas stables et finissent par casser.Étant donné que les images sont en moyenne plus claires lorsque le gel eststructuré, une manière de visualiserqualitativement comment les structures cassent est de regarder l’évolution du niveau de gris moyen ou de sadéviation standard sur une couronne au cours du temps et de l’espace (figure 15).
(a) Moyenne (b) Écart-type
0 200 400 60020
40
60
80
100
temps (en s)
nive
au d
e gr
is m
oyen
pou
r r=
20,2
mm
(u.
a.)
(c) Coupe verticale de la figure 15(a)pour une distance au centre der0 =
20,2 mm
FIGURE 15 –15(a) et 15(b) : évolution spatio-temporelle du niveau de gris moyen et de l’écart-type du niveau de gris surdes couronnes concentriques dans un rhéomètre en géométrieplan-plan àγ = 2 s−1 eth =100 µm. Le bleu représente uneimage sombre en moyenne et rouge une image claire. 15(c) est une coupe verticale de 15(a) enr0 = 20,2 mm.
Sur la figure 15, on voit que sur la droite de la figure les couleurs redeviennent froides plus rapidement. Celaveut dire que pour les rayons les plus grands, le niveau de gris rediminue plus rapidement que pour les zones
8
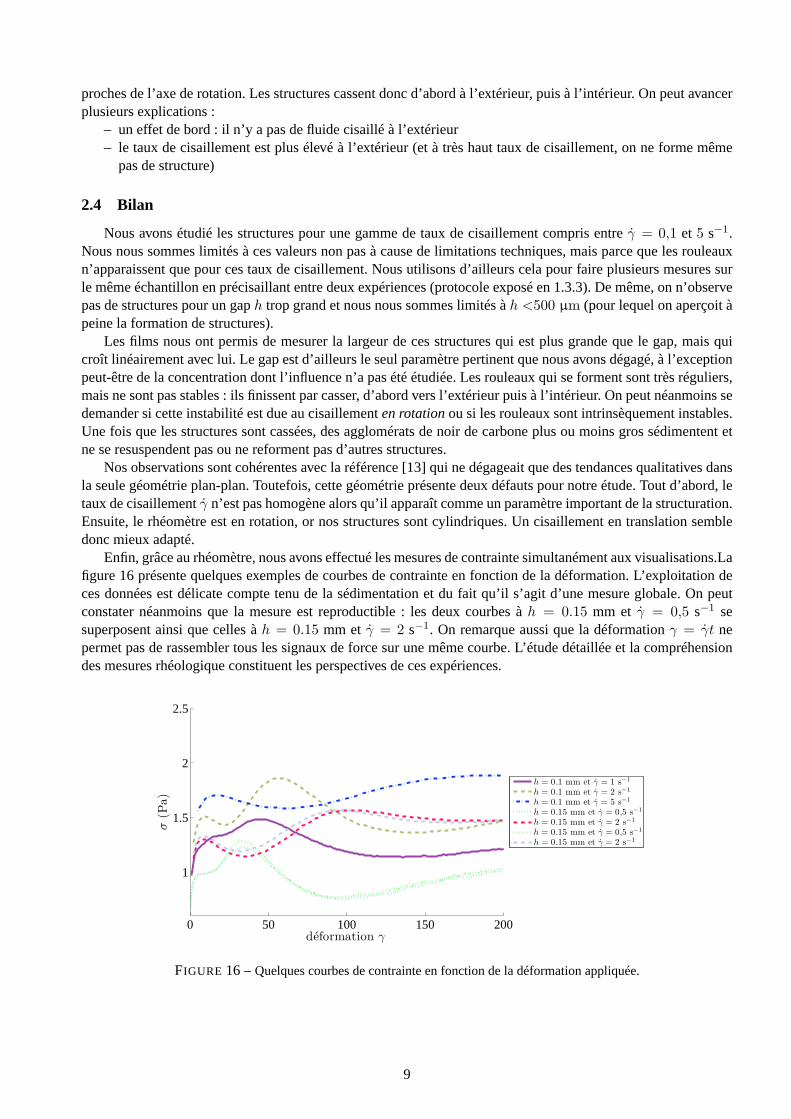
proches de l’axe de rotation. Les structures cassent donc d’abord àl’extérieur, puis à l’intérieur. On peut avancerplusieurs explications :
– un effet de bord : il n’y a pas de fluide cisaillé à l’extérieur– le taux de cisaillement est plus élevé à l’extérieur (et à très haut taux de cisaillement, on ne forme même
pas de structure)
2.4 Bilan
Nous avons étudié les structures pour une gamme de taux de cisaillement compris entreγ = 0,1 et 5 s−1.Nous nous sommes limités à ces valeurs non pas à cause de limitations techniques, mais parce que les rouleauxn’apparaissent que pour ces taux de cisaillement. Nous utilisons d’ailleurscela pour faire plusieurs mesures surle même échantillon en précisaillant entre deux expériences (protocole exposé en 1.3.3). De même, on n’observepas de structures pour un gaph trop grand et nous nous sommes limités àh <500 µm (pour lequel on aperçoit àpeine la formation de structures).
Les films nous ont permis de mesurer la largeur de ces structures qui est plus grande que le gap, mais quicroît linéairement avec lui. Le gap est d’ailleurs le seul paramètre pertinent que nous avons dégagé, à l’exceptionpeut-être de la concentration dont l’influence n’a pas été étudiée. Les rouleaux qui se forment sont très réguliers,mais ne sont pas stables : ils finissent par casser, d’abord vers l’extérieur puis à l’intérieur. On peut néanmoins sedemander si cette instabilité est due au cisaillementen rotationou si les rouleaux sont intrinsèquement instables.Une fois que les structures sont cassées, des agglomérats de noir de carbone plus ou moins gros sédimentent etne se resuspendent pas ou ne reforment pas d’autres structures.
Nos observations sont cohérentes avec la référence [13] qui ne dégageait que des tendances qualitatives dansla seule géométrie plan-plan. Toutefois, cette géométrie présente deux défauts pour notre étude. Tout d’abord, letaux de cisaillementγ n’est pas homogène alors qu’il apparaît comme un paramètre important de lastructuration.Ensuite, le rhéomètre est en rotation, or nos structures sont cylindriques. Un cisaillement en translation sembledonc mieux adapté.
Enfin, grâce au rhéomètre, nous avons effectué les mesures de contrainte simultanément aux visualisations.Lafigure 16 présente quelques exemples de courbes de contrainte en fonction de la déformation. L’exploitation deces données est délicate compte tenu de la sédimentation et du fait qu’il s’agit d’une mesure globale. On peutconstater néanmoins que la mesure est reproductible : les deux courbes àh = 0.15 mm et γ = 0,5 s−1 sesuperposent ainsi que celles àh = 0.15 mm et γ = 2 s−1. On remarque aussi que la déformationγ = γt nepermet pas de rassembler tous les signaux de force sur une même courbe.L’étude détaillée et la compréhensiondes mesures rhéologique constituent les perspectives de ces expériences.
0 50 100 150 200
1
1.5
2
2.5
deformation γ
σ(P
a)
h = 0.1 mm et γ = 1 s−1
h = 0.1 mm et γ = 2 s−1
h = 0.1 mm et γ = 5 s−1
h = 0.15 mm et γ = 0,5 s−1
h = 0.15 mm et γ = 2 s−1
h = 0.15 mm et γ = 0,5 s−1
h = 0.15 mm et γ = 2 s−1
FIGURE 16 –Quelques courbes de contrainte en fonction de la déformation appliquée.
9
3 Étude à l’aide d’un rhéomètre en géométrie cône-plan
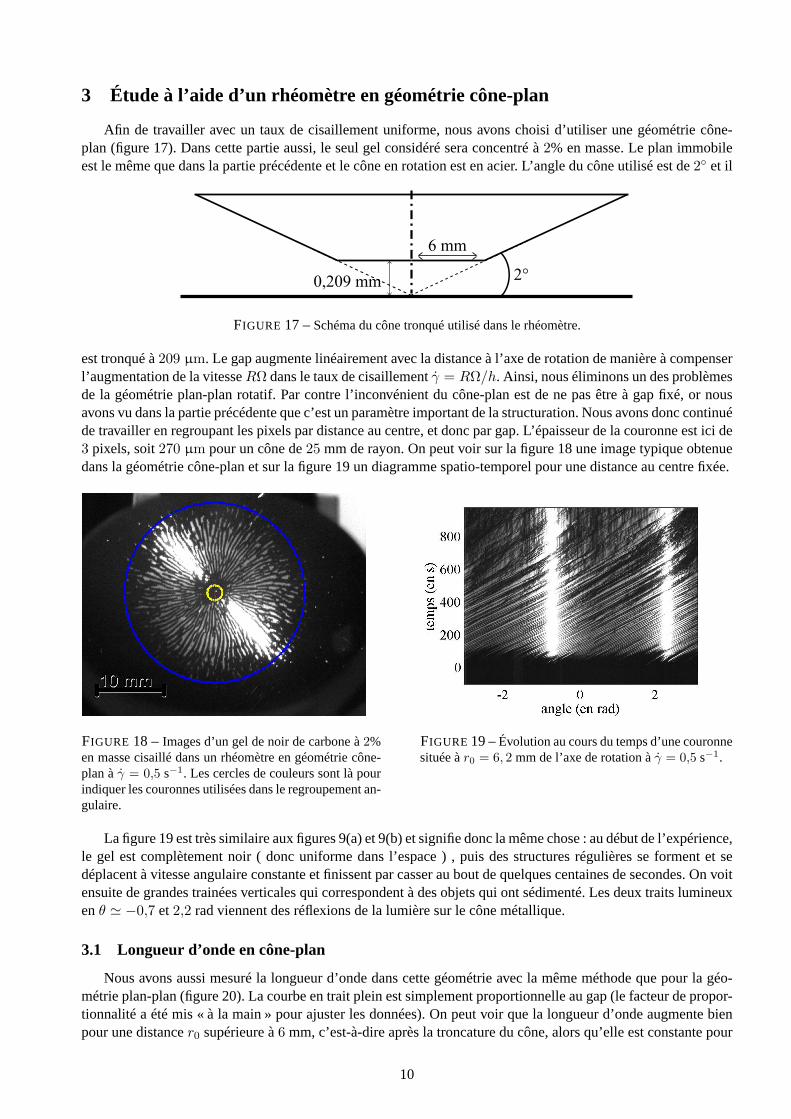
Afin de travailler avec un taux de cisaillement uniforme, nous avons choisi d’utiliser une géométrie cône-plan (figure 17). Dans cette partie aussi, le seul gel considéré sera concentré à2% en masse. Le plan immobileest le même que dans la partie précédente et le cône en rotation est en acier.L’angle du cône utilisé est de2 et il
FIGURE 17 –Schéma du cône tronqué utilisé dans le rhéomètre.
est tronqué à209 µm. Le gap augmente linéairement avec la distance à l’axe de rotation de manière àcompenserl’augmentation de la vitesseRΩ dans le taux de cisaillementγ = RΩ/h. Ainsi, nous éliminons un des problèmesde la géométrie plan-plan rotatif. Par contre l’inconvénient du cône-plan est de ne pas être à gap fixé, or nousavons vu dans la partie précédente que c’est un paramètre important de lastructuration. Nous avons donc continuéde travailler en regroupant les pixels par distance au centre, et donc par gap. L’épaisseur de la couronne est ici de3 pixels, soit270 µm pour un cône de25 mm de rayon. On peut voir sur la figure 18 une image typique obtenuedans la géométrie cône-plan et sur la figure 19 un diagramme spatio-temporelpour une distance au centre fixée.
FIGURE 18 – Images d’un gel de noir de carbone à2%en masse cisaillé dans un rhéomètre en géométrie cône-plan àγ = 0,5 s−1. Les cercles de couleurs sont là pourindiquer les couronnes utilisées dans le regroupement an-gulaire.
FIGURE 19 –Évolution au cours du temps d’une couronnesituée àr0 = 6, 2 mm de l’axe de rotation àγ = 0,5 s−1.
La figure 19 est très similaire aux figures 9(a) et 9(b) et signifie donc la même chose : au début de l’expérience,le gel est complètement noir ( donc uniforme dans l’espace ) , puis des structures régulières se forment et sedéplacent à vitesse angulaire constante et finissent par casser au bout de quelques centaines de secondes. On voitensuite de grandes trainées verticales qui correspondent à des objetsqui ont sédimenté. Les deux traits lumineuxenθ ≃ −0,7 et2,2 rad viennent des réflexions de la lumière sur le cône métallique.
3.1 Longueur d’onde en cône-plan
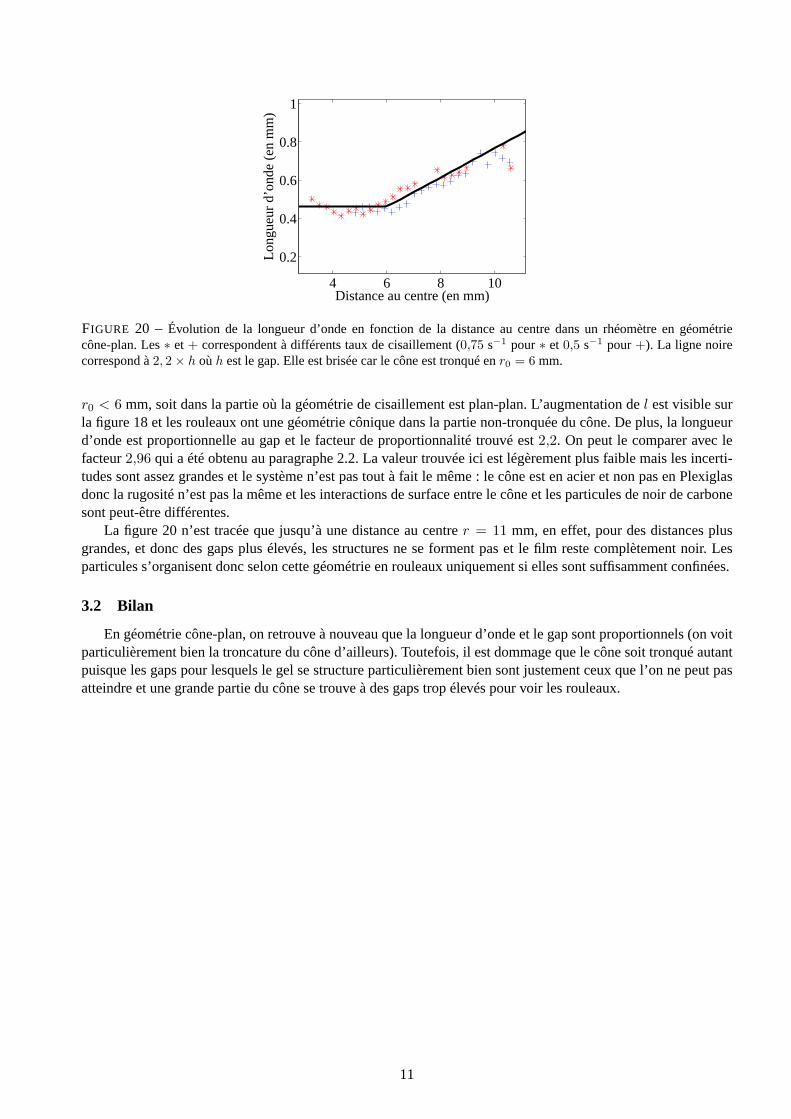
Nous avons aussi mesuré la longueur d’onde dans cette géométrie avec lamême méthode que pour la géo-métrie plan-plan (figure 20). La courbe en trait plein est simplement proportionnelle au gap (le facteur de propor-tionnalité a été mis « à la main » pour ajuster les données). On peut voir que la longueur d’onde augmente bienpour une distancer0 supérieure à6 mm, c’est-à-dire après la troncature du cône, alors qu’elle est constantepour
10
4 6 8 10
0.2
0.4
0.6
0.8
1
Distance au centre (en mm)
Long
ueur
d’o
nde
(en
mm
)
FIGURE 20 – Évolution de la longueur d’onde en fonction de la distance aucentre dans un rhéomètre en géométriecône-plan. Les∗ et + correspondent à différents taux de cisaillement (0,75 s−1 pour∗ et 0,5 s−1 pour+). La ligne noirecorrespond à2, 2 × h oùh est le gap. Elle est brisée car le cône est tronqué enr0 = 6 mm.
r0 < 6 mm, soit dans la partie où la géométrie de cisaillement est plan-plan. L’augmentation del est visible surla figure 18 et les rouleaux ont une géométrie cônique dans la partie non-tronquée du cône. De plus, la longueurd’onde est proportionnelle au gap et le facteur de proportionnalité trouvé est2,2. On peut le comparer avec lefacteur2,96 qui a été obtenu au paragraphe 2.2. La valeur trouvée ici est légèrement plus faible mais les incerti-tudes sont assez grandes et le système n’est pas tout à fait le même : le cône est en acier et non pas en Plexiglasdonc la rugosité n’est pas la même et les interactions de surface entre le cône et les particules de noir de carbonesont peut-être différentes.
La figure 20 n’est tracée que jusqu’à une distance au centrer = 11 mm, en effet, pour des distances plusgrandes, et donc des gaps plus élevés, les structures ne se forment pas et le film reste complètement noir. Lesparticules s’organisent donc selon cette géométrie en rouleaux uniquement si elles sont suffisamment confinées.
3.2 Bilan
En géométrie cône-plan, on retrouve à nouveau que la longueur d’ondeet le gap sont proportionnels (on voitparticulièrement bien la troncature du cône d’ailleurs). Toutefois, il est dommage que le cône soit tronqué autantpuisque les gaps pour lesquels le gel se structure particulièrement bien sont justement ceux que l’on ne peut pasatteindre et une grande partie du cône se trouve à des gaps trop élevés pour voir les rouleaux.
11
4 Étude dans une cellule de cisaillement en translation plan-plan
Les deux géométries plan-plan et cône-plan en rotation présentent des inconvénients :γ ou h ne sont pasuniformes. Pour remédier à cela, nous avons décidé de fabriquer une cellule de cisaillement en translation plan-plan. Ce type de cellule présente l’avantage d’être à la fois àγ et àh uniforme.
Puisque la structuration et les propriétes rhéologiques sont généralement liées, nous avons essayé tout commedans le rhéomètre d’avoir accès à la contrainte appliquée au système lorsque le taux de cisaillement est imposé.Nous avons donc ici essayé d’adapter une expérience de mesure de force dans un milieu granulaire [14] à unemesure sur un gel tout en filmant en simultané.
4.1 Présentation du système expérimental
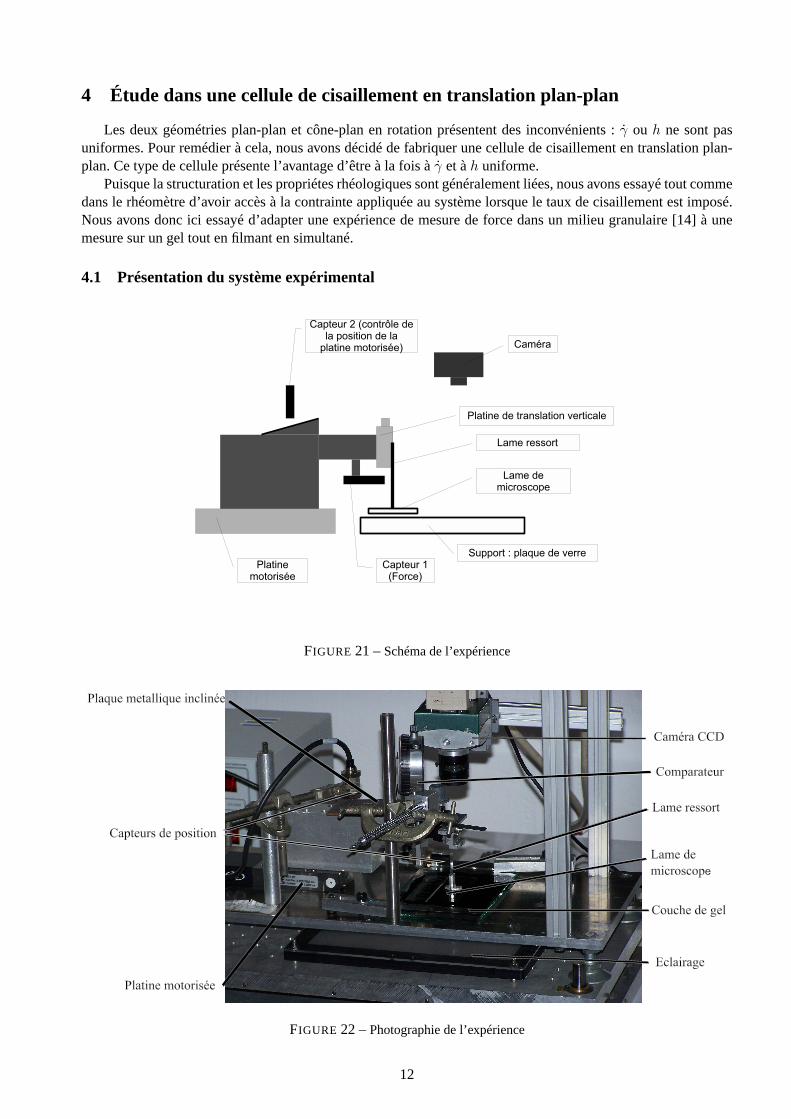
FIGURE 21 –Schéma de l’expérience
FIGURE 22 –Photographie de l’expérience
12
L’expérience (schéma figure 21 et photographie figure 22) consiste àpousser un patin à l’aide d’une lameflexible sur un matériau fluide. Un capteur inductif délivre une tension qui varie en fonction de la proximité d’unobjet métallique, il est donc sensible à la déflexion de la lame ce qui permet, après étalonnage, de remonter à laforce exercée sur le patin. La mise en mouvement est assurée par une platine motorisée dont la course est limitéeà25 mm. Dans notre cas, le support est une plaque de verre sur laquelle on étale le gel. Le patin est une lame demicroscope en verre et la lame ressort est une lame d’acier de8 mm de large et0,2 mm d’épaisseur. Pour réglerle gap, notre lame ressort est fixée sur une platine micrométrique qui se déplace verticalement, elle même fixée àla platine motorisée de déplacement horizontal. Compte tenu de l’hystérésis de laplatine de translation verticale,nous avons choisi de contrôler le gap en utilisant un comparateur. Nous avons aussi contrôlé le déplacement de laplatine motorisée en utilisant un deuxième capteur inductif en vis à vis d’une plaque métallique inclinée liée à laplatine. La visualisation s’effectue au moyen d’une caméra placée au dessus de l’expérience à la verticale, soit àl’aide d’un objectif de microscope pour zoomer, soit à l’aide d’objectifs classiques pour avoir une image globale.
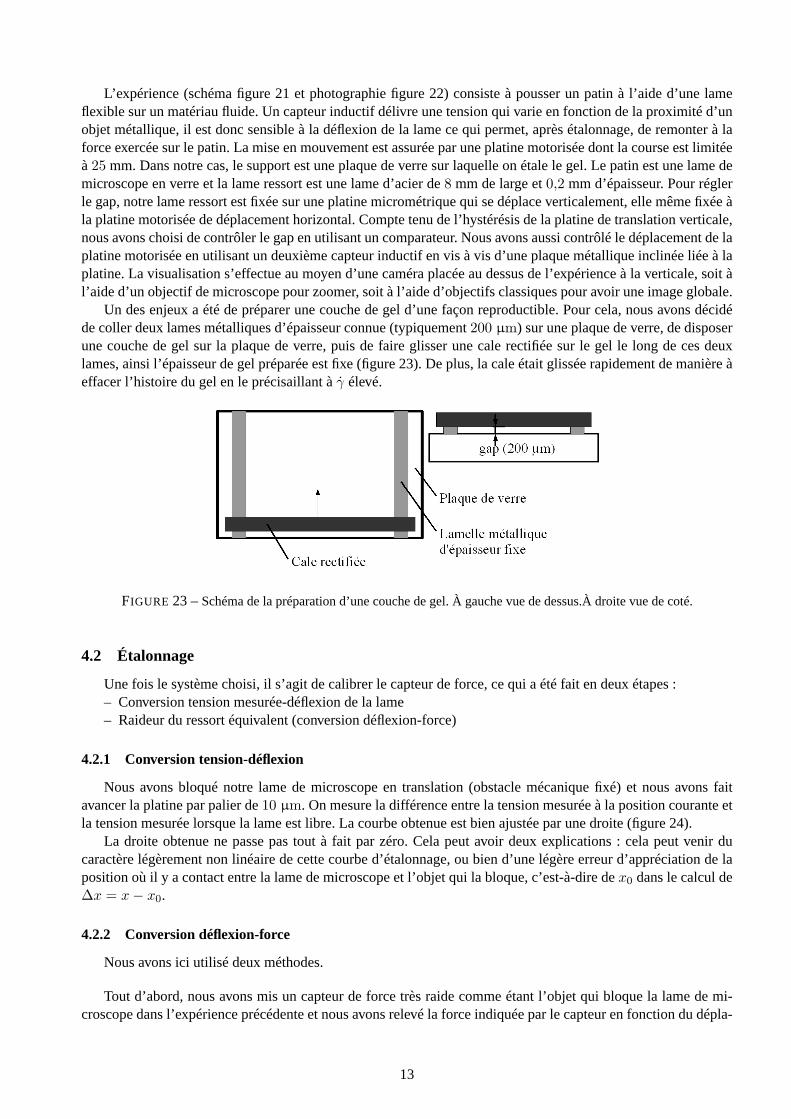
Un des enjeux a été de préparer une couche de gel d’une façon reproductible. Pour cela, nous avons décidéde coller deux lames métalliques d’épaisseur connue (typiquement200 µm) sur une plaque de verre, de disposerune couche de gel sur la plaque de verre, puis de faire glisser une calerectifiée sur le gel le long de ces deuxlames, ainsi l’épaisseur de gel préparée est fixe (figure 23). De plus, la cale était glissée rapidement de manière àeffacer l’histoire du gel en le précisaillant àγ élevé.
FIGURE 23 –Schéma de la préparation d’une couche de gel. À gauche vue de dessus.À droite vue de coté.
4.2 Étalonnage
Une fois le système choisi, il s’agit de calibrer le capteur de force, ce quia été fait en deux étapes :– Conversion tension mesurée-déflexion de la lame– Raideur du ressort équivalent (conversion déflexion-force)
4.2.1 Conversion tension-déflexion
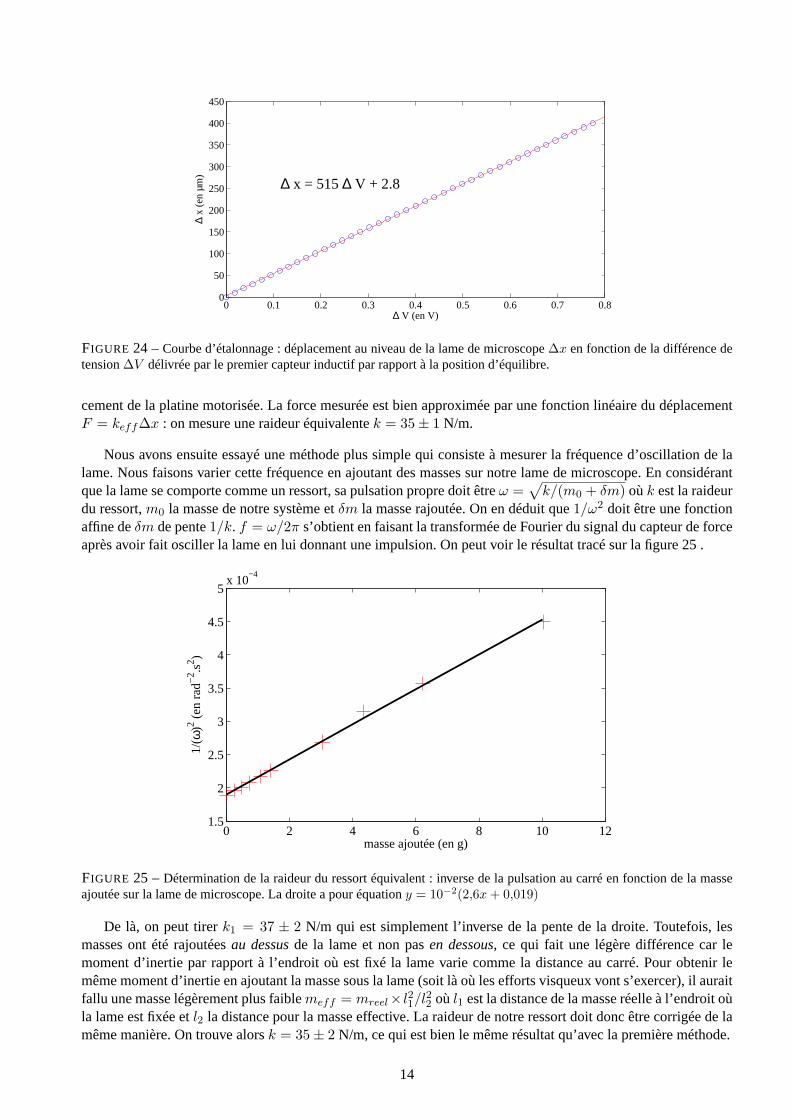
Nous avons bloqué notre lame de microscope en translation (obstacle mécanique fixé) et nous avons faitavancer la platine par palier de10 µm. On mesure la différence entre la tension mesurée à la position courante etla tension mesurée lorsque la lame est libre. La courbe obtenue est bien ajustée par une droite (figure 24).
La droite obtenue ne passe pas tout à fait par zéro. Cela peut avoir deux explications : cela peut venir ducaractère légèrement non linéaire de cette courbe d’étalonnage, ou biend’une légère erreur d’appréciation de laposition où il y a contact entre la lame de microscope et l’objet qui la bloque, c’est-à-dire dex0 dans le calcul de∆x = x − x0.
4.2.2 Conversion déflexion-force
Nous avons ici utilisé deux méthodes.
Tout d’abord, nous avons mis un capteur de force très raide comme étantl’objet qui bloque la lame de mi-croscope dans l’expérience précédente et nous avons relevé la force indiquée par le capteur en fonction du dépla-
13
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
50
100
150
200
250
300
350
400
450
∆ x
(en
µm
)
∆ V (en V)
∆ x = 515 ∆ V + 2.8
FIGURE 24 –Courbe d’étalonnage : déplacement au niveau de la lame de microscope∆x en fonction de la différence detension∆V délivrée par le premier capteur inductif par rapport à la position d’équilibre.
cement de la platine motorisée. La force mesurée est bien approximée par une fonction linéaire du déplacementF = keff∆x : on mesure une raideur équivalentek = 35 ± 1 N/m.
Nous avons ensuite essayé une méthode plus simple qui consiste à mesurer lafréquence d’oscillation de lalame. Nous faisons varier cette fréquence en ajoutant des masses sur notre lame de microscope. En considérantque la lame se comporte comme un ressort, sa pulsation propre doit êtreω =
√
k/(m0 + δm) oùk est la raideurdu ressort,m0 la masse de notre système etδm la masse rajoutée. On en déduit que1/ω2 doit être une fonctionaffine deδm de pente1/k. f = ω/2π s’obtient en faisant la transformée de Fourier du signal du capteur de forceaprès avoir fait osciller la lame en lui donnant une impulsion. On peut voir le résultat tracé sur la figure 25 .
0 2 4 6 8 10 121.5
2
2.5
3
3.5
4
4.5
5x 10
−4
masse ajoutée (en g)
1/(ω
)2 (en
rad
−2 .s
2 )
FIGURE 25 –Détermination de la raideur du ressort équivalent : inversede la pulsation au carré en fonction de la masseajoutée sur la lame de microscope. La droite a pour équationy = 10−2(2,6x + 0,019)
De là, on peut tirerk1 = 37 ± 2 N/m qui est simplement l’inverse de la pente de la droite. Toutefois, lesmasses ont été rajoutéesau dessusde la lame et non pasen dessous, ce qui fait une légère différence car lemoment d’inertie par rapport à l’endroit où est fixé la lame varie comme la distance au carré. Pour obtenir lemême moment d’inertie en ajoutant la masse sous la lame (soit là où les efforts visqueux vont s’exercer), il auraitfallu une masse légèrement plus faiblemeff = mreel× l2
1/l2
2où l1 est la distance de la masse réelle à l’endroit où
la lame est fixée etl2 la distance pour la masse effective. La raideur de notre ressort doit donc être corrigée de lamême manière. On trouve alorsk = 35 ± 2 N/m, ce qui est bien le même résultat qu’avec la première méthode.
14
4.3 Mesure de force
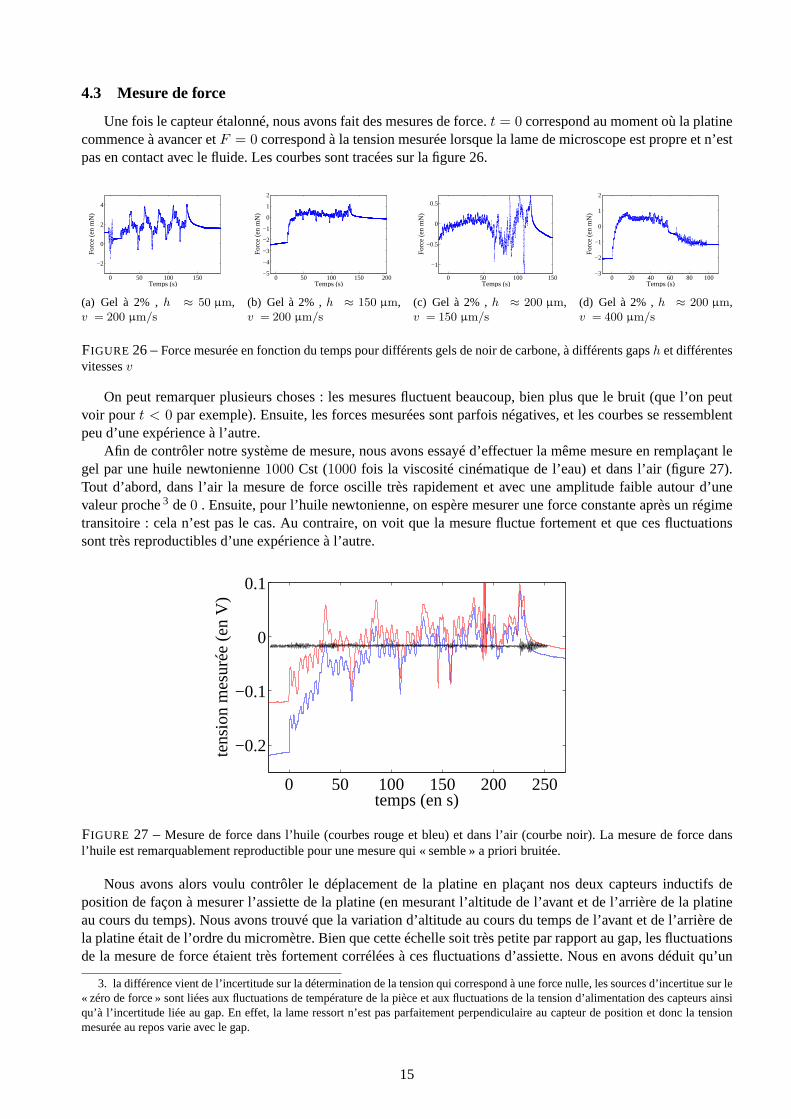
Une fois le capteur étalonné, nous avons fait des mesures de force.t = 0 correspond au moment où la platinecommence à avancer etF = 0 correspond à la tension mesurée lorsque la lame de microscope est propreet n’estpas en contact avec le fluide. Les courbes sont tracées sur la figure 26.
0 50 100 150
−2
0
2
4
Temps (s)
For
ce (
en m
N)
(a) Gel à 2% ,h ≈ 50 µm,v = 200 µm/s
0 50 100 150 200−5
−4
−3
−2
−1
0
1
2
Temps (s)
For
ce (
en m
N)
(b) Gel à 2% ,h ≈ 150 µm,v = 200 µm/s
0 50 100 150
−1
−0.5
0
0.5
Temps (s)
For
ce (
en m
N)
(c) Gel à 2% ,h ≈ 200 µm,v = 150 µm/s
0 20 40 60 80 100−3
−2
−1
0
1
2
Temps (s)
For
ce (
en m
N)
(d) Gel à 2% ,h ≈ 200 µm,v = 400 µm/s
FIGURE 26 –Force mesurée en fonction du temps pour différents gels de noir de carbone, à différents gapsh et différentesvitessesv
On peut remarquer plusieurs choses : les mesures fluctuent beaucoup, bien plus que le bruit (que l’on peutvoir pour t < 0 par exemple). Ensuite, les forces mesurées sont parfois négatives, et les courbes se ressemblentpeu d’une expérience à l’autre.
Afin de contrôler notre système de mesure, nous avons essayé d’effectuer la même mesure en remplaçant legel par une huile newtonienne1000 Cst (1000 fois la viscosité cinématique de l’eau) et dans l’air (figure 27).Tout d’abord, dans l’air la mesure de force oscille très rapidement et avec une amplitude faible autour d’unevaleur proche3 de0 . Ensuite, pour l’huile newtonienne, on espère mesurer une force constante après un régimetransitoire : cela n’est pas le cas. Au contraire, on voit que la mesure fluctue fortement et que ces fluctuationssont très reproductibles d’une expérience à l’autre.
0 50 100 150 200 250
−0.2
−0.1
0
0.1
temps (en s)
tens
ion
mes
urée
(en
V)
FIGURE 27 – Mesure de force dans l’huile (courbes rouge et bleu) et dans l’air (courbe noir). La mesure de force dansl’huile est remarquablement reproductible pour une mesurequi « semble » a priori bruitée.
Nous avons alors voulu contrôler le déplacement de la platine en plaçant nos deux capteurs inductifs deposition de façon à mesurer l’assiette de la platine (en mesurant l’altitude de l’avant et de l’arrière de la platineau cours du temps). Nous avons trouvé que la variation d’altitude au coursdu temps de l’avant et de l’arrière dela platine était de l’ordre du micromètre. Bien que cette échelle soit très petite parrapport au gap, les fluctuationsde la mesure de force étaient très fortement corrélées à ces fluctuations d’assiette. Nous en avons déduit qu’un
3. la différence vient de l’incertitude sur la détermination de la tension qui correspond à une force nulle, les sources d’incertitue sur le« zéro de force » sont liées aux fluctuations de température de la pièce etaux fluctuations de la tension d’alimentation des capteurs ainsiqu’à l’incertitude liée au gap. En effet, la lame ressort n’est pas parfaitement perpendiculaire au capteur de position et donc la tensionmesurée au repos varie avec le gap.
15
des problèmes majeurs de notre mesure de force venait de là. Il y a aussid’autres problèmes comme par exempleles forces de tension de surface qui ne sont pas négligeables si l’hystérésis des angles de contact devient grandou l’accumulation de matière devant la lamelle de microscope lorsqu’elle avance. Il y a aussi les problèmes dereproductibilité sur la façon de poser la lame sur le gel ou l’huile.
Par conséquent, nous avons abandonné la mesure de force sur ce système et nous avons remplacé notre lameressort par une lame2,5 fois plus épaisse pour avoir un système plus rigide et nous concentrer sur la « visualisationdirecte » de la structure du gel sous cisaillement.
4.4 Optique
4.4.1 Dynamique de structuration
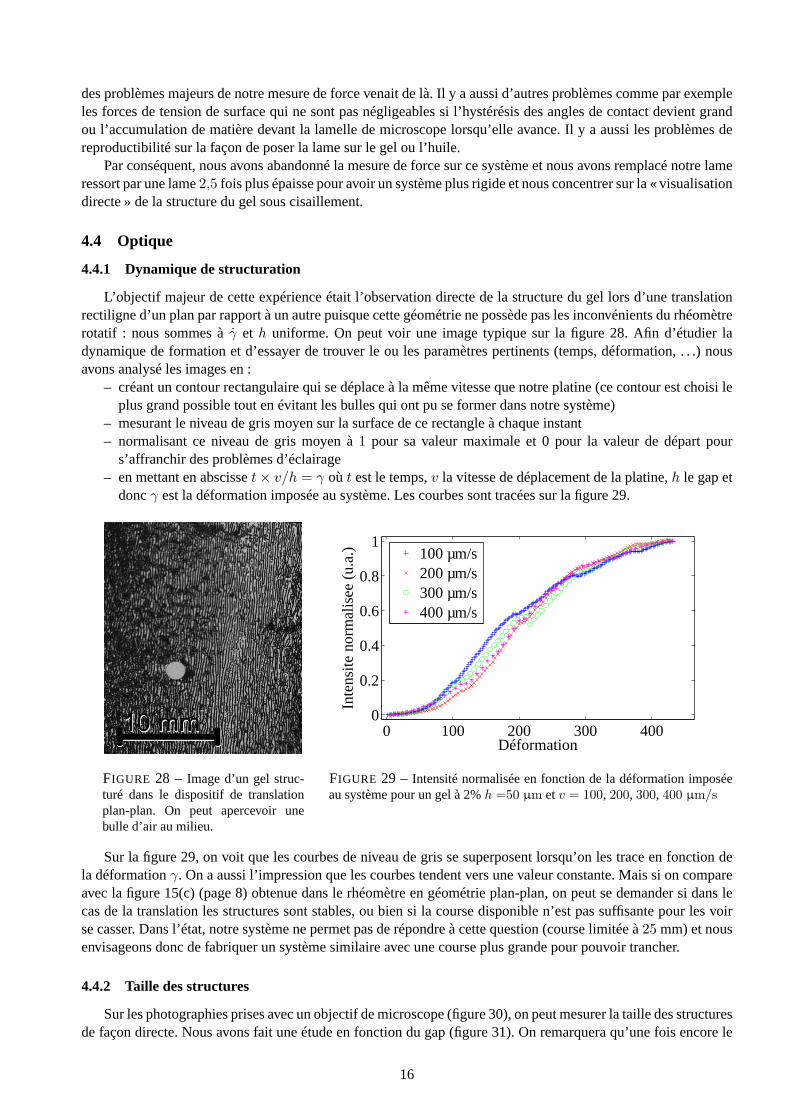
L’objectif majeur de cette expérience était l’observation directe de la structure du gel lors d’une translationrectiligne d’un plan par rapport à un autre puisque cette géométrie ne possède pas les inconvénients du rhéomètrerotatif : nous sommes àγ et h uniforme. On peut voir une image typique sur la figure 28. Afin d’étudier ladynamique de formation et d’essayer de trouver le ou les paramètres pertinents (temps, déformation, . . .) nousavons analysé les images en :
– créant un contour rectangulaire qui se déplace à la même vitesse que notre platine (ce contour est choisi leplus grand possible tout en évitant les bulles qui ont pu se former dans notre système)
– mesurant le niveau de gris moyen sur la surface de ce rectangle à chaque instant– normalisant ce niveau de gris moyen à1 pour sa valeur maximale et 0 pour la valeur de départ pour
s’affranchir des problèmes d’éclairage– en mettant en abscisset × v/h = γ où t est le temps,v la vitesse de déplacement de la platine,h le gap et
doncγ est la déformation imposée au système. Les courbes sont tracées sur la figure 29.
FIGURE 28 – Image d’un gel struc-turé dans le dispositif de translationplan-plan. On peut apercevoir unebulle d’air au milieu.
0 100 200 300 4000
0.2
0.4
0.6
0.8
1
Déformation
Inte
nsite
nor
mal
isee
(u.
a.)
100 µm/s200 µm/s300 µm/s400 µm/s
FIGURE 29 – Intensité normalisée en fonction de la déformation imposéeau système pour un gel à 2%h =50 µm etv = 100, 200, 300, 400 µm/s
Sur la figure 29, on voit que les courbes de niveau de gris se superposent lorsqu’on les trace en fonction dela déformationγ. On a aussi l’impression que les courbes tendent vers une valeur constante. Mais si on compareavec la figure 15(c) (page 8) obtenue dans le rhéomètre en géométrie plan-plan, on peut se demander si dans lecas de la translation les structures sont stables, ou bien si la course disponible n’est pas suffisante pour les voirse casser. Dans l’état, notre système ne permet pas de répondre à cette question (course limitée à25 mm) et nousenvisageons donc de fabriquer un système similaire avec une course plusgrande pour pouvoir trancher.
4.4.2 Taille des structures
Sur les photographies prises avec un objectif de microscope (figure 30), on peut mesurer la taille des structuresde façon directe. Nous avons fait une étude en fonction du gap (figure31). On remarquera qu’une fois encore le
16
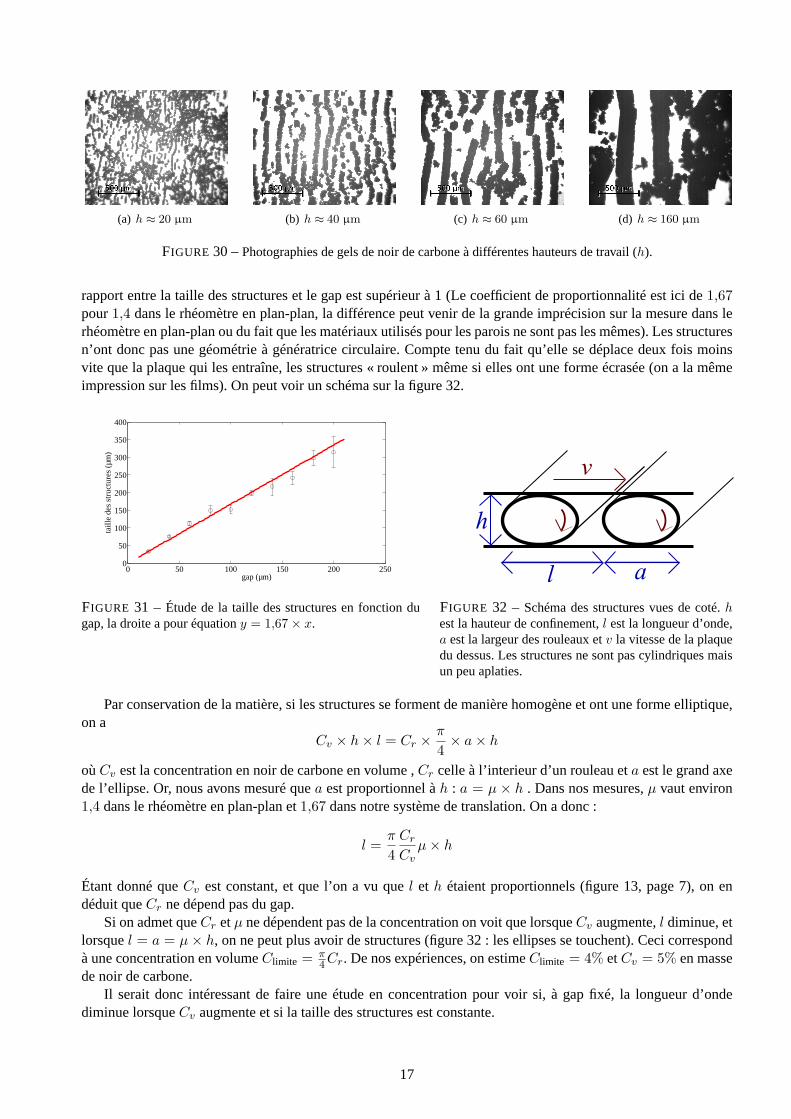
(a) h ≈ 20 µm (b) h ≈ 40 µm (c) h ≈ 60 µm (d) h ≈ 160 µm
FIGURE 30 –Photographies de gels de noir de carbone à différentes hauteurs de travail (h).
rapport entre la taille des structures et le gap est supérieur à 1 (Le coefficient de proportionnalité est ici de1,67pour1,4 dans le rhéomètre en plan-plan, la différence peut venir de la grande imprécision sur la mesure dans lerhéomètre en plan-plan ou du fait que les matériaux utilisés pour les parois nesont pas les mêmes). Les structuresn’ont donc pas une géométrie à génératrice circulaire. Compte tenu du faitqu’elle se déplace deux fois moinsvite que la plaque qui les entraîne, les structures « roulent » même si elles ontune forme écrasée (on a la mêmeimpression sur les films). On peut voir un schéma sur la figure 32.
0 50 100 150 200 2500
50
100
150
200
250
300
350
400
gap (µm)
taill
e de
s st
ruct
ures
(µ
m)
FIGURE 31 – Étude de la taille des structures en fonction dugap, la droite a pour équationy = 1,67 × x.
FIGURE 32 – Schéma des structures vues de coté.hest la hauteur de confinement,l est la longueur d’onde,a est la largeur des rouleaux etv la vitesse de la plaquedu dessus. Les structures ne sont pas cylindriques maisun peu aplaties.
Par conservation de la matière, si les structures se forment de manière homogène et ont une forme elliptique,on a
Cv × h × l = Cr ×π
4× a × h
oùCv est la concentration en noir de carbone en volume ,Cr celle à l’interieur d’un rouleau eta est le grand axede l’ellipse. Or, nous avons mesuré quea est proportionnel àh : a = µ × h . Dans nos mesures,µ vaut environ1,4 dans le rhéomètre en plan-plan et1,67 dans notre système de translation. On a donc :
l =π
4
Cr
Cv
µ × h
Étant donné queCv est constant, et que l’on a vu quel et h étaient proportionnels (figure 13, page 7), on endéduit queCr ne dépend pas du gap.
Si on admet queCr etµ ne dépendent pas de la concentration on voit que lorsqueCv augmente,l diminue, etlorsquel = a = µ × h, on ne peut plus avoir de structures (figure 32 : les ellipses se touchent). Ceci correspondà une concentration en volumeClimite = π
4Cr. De nos expériences, on estimeClimite = 4% etCv = 5% en masse
de noir de carbone.Il serait donc intéressant de faire une étude en concentration pour voir si, à gap fixé, la longueur d’onde
diminue lorsqueCv augmente et si la taille des structures est constante.
17

4.5 Bilan
Tout d’abord après une longue mise au point du dispositif présenté au 4.1, nous avons été contraints d’aban-donner la mesure de force. Cela nous a permis de modifier le système pour rendre les paramètres plus facilementcontrôlables : par exemple guider le plan en translation sans avoir à se préocuper de la part de la force qui estdue au frottement. Ensuite, l’optique nous a permis de constater que le paramètre qui semble pertinent pour ladynamique de formation est la déformationγ. Toutefois, nous n’avons pas pu confirmer ce résultat à partir durhéomètre en plan plan où la situation est plus compliquée puisque le taux de cisaillement γ est plus élevé àl’extérieur qu’à l’intérieur. On peut donc imaginer que, dans le rhéomètre, les structures se forment d’abord àl’extérieur puis se propagent vers l’intérieur.
Nous avons à nouveau mesuré la largeur des structures en fonction du gap, mais de manière nettement plusprécise cette fois. Cette largeur est nettement plus grande que le gap comme nous l’annoncions précédemment.Ces résultats suggèrent de mener une étude en concentration pour voir si les rouleaux se forment avec unecompacité fixée.
5 Perspectives
5.1 Avec le rhéomètre
Tout d’abord, l’étude du protocole, et en particulier du temps d’attente après le précisaillement serait intéres-sante, néanmoins, il faut être prudent quant à l’interprétation puisque sur des temps longs (de l’ordre de quelquesjours ou une semaine), même au repos, le système fini par sédimenter.
Ensuite, parmi les trois paramètres que nous avons à notre disposition qui sont le gaph, le taux de cisaillementγ et la concentrationCv, nous avons surtout étudié l’influence du gap, succinctement celle du taux de cisaillementet pas du tout celle de la concentration. Ce dernier point serait tout particulièrement intéressant pour voir si lalargeur des rouleaux dépend de la concentration.
Une autre piste est de faire de la visualisation avec un grossissement plus grand afin d’accéder directement àla formation et la disparition de ces structures. D’un point de vue de la formation, dans le plan-plan nous avonsaussi envisagé de faire varier le diamètre du plan en mouvement. Le but estde voir si le temps de formation àune distance au centre donnée dépend du diamètre du plan en rotation, ce qui permettrait de voir si la formationdes rouleaux au centre est due à la propagation des structures qui se forment à l’extérieur ou si elle se faitindépendamment.
Enfin, il nous faudra analyser les signaux rhéologiques et tenter d’interpréter ces mesures globales en lescorrélant aux visualisations locales.
5.2 En translation
Nous avons imaginé un nouveau moyen d’appliquer un cisaillement en translation à gap fixé et sur desdistances de l’ordre de la dizaine de centimètres afin d’essayer de prolonger la courbe de la figure 29 et de voir siles structures sont intrinsèquement instables où si elles cassent à caused’effets géométriques dans le rhéomètre.Il s’agit de faire reposer la plaque en translation sur deux supports fixes d’une manière similaire à celle employéepour préparer la couche de gel (figure 23), en imposant ensuite une force normale élevée, on s’assure que le gapest fixe et il « suffit » ensuite de pousser à vitesse constante. Des essais préliminaires semblent indiquer que lesstructures ne seraient pas stables même en translation entre deux plans.
18
Conclusion
Lors de ce stage, nous avons réussi à observer la structuration dansdes gels de noir de carbone et ce dansplusieurs géométries différentes. Nous avons ainsi pu dégager quelques paramètres importants : le taux de cisaille-ment et surtout la taille sur laquelle le gel est confiné conditionnent non seulement l’apparition des structures,mais aussi leur taille et leur espacement. Le rhéomètre rotatif a été un instrumentpratique qui nous a permisd’observer la formation et la disparition des rouleaux en géométrie plan-plan et en cône-plan, mais compte tenude la forme des structures, nous avons choisi de fabriquer un dispositifde cisaillement en translation. Même sila mesure de force n’est pas exploitable dans ce dispositif, il nous a permisde réaliser des mesures optiquesintéressantes qui indiquent que le paramètre pertinent pour la formation des structures serait la déformation.
Bien que l’étude que nous avons menée se limite aux gels de noir de carbone,d’autres fluides complexesprésentent des structures alignées selon la vorticité comme les suspensionsde nanotubes de carbone [15], desgels d’argile thixotropes [16] ou encore des émulsions attractives [17].On peut donc espérer que nos résultatsont une portée plus générale et peuvent s’appliquer à de nombreux systèmes colloïdaux avec des interactionsattractives.
Remerciements
Je souhaite tout d’abord remercier Sébastien Manneville et Nicolas Taberlet qui étaient très disponibles et quim’ont permis de travailler dans d’agréables conditions, j’ai beaucoup appris à leurs cotés.
Merci aussi à Thibault Divoux et à Jean-Christophe Géminard avec qui nous avons eu de nombreuses discus-sions. Et enfin merci à David Tamarii pour l’aide dans l’utilisation du rhéomètre.
19
Références
[1] P. Oswald.Rhéophysique : ou comment coule la matière. Belin, 2005.
[2] HA Barnes, JF Hutton, and K. Walters.An Introduction to Rheology, Rheology Series 3. Elsevier, Amster-dam, 1989.
[3] T. Divoux, E. Bertin, V. Vidal, and J.-C. Geminard. Intermittent outgassing through a non-Newtonian fluid.Physical Review E, 79(5, Part 2), 2009.
[4] Y.J. Liu, T.Y. Liao, and D.D. Joseph. A two-dimensional cusp at the trailing edge of an air bubble rising ina viscoelastic liquid.Journal of Fluid Mechanics, 304 :321–342, 1995.
[5] Peter J. Lu, Emanuela Zaccarelli, Fabio Ciulla, Andrew B. Schofield, Francesco Sciortino, and David A.Weitz. Gelation of particles with short-range attraction.Nature, 453(7194) :499–U4, 2008.
[6] V. Trappe, V. Prasad, L. Cipelletti, P.N. Segre, and D.A. Weitz. Jammingphase diagram for attractiveparticles.Nature, 411(6839) :772–775, 2001.
[7] A. Montesi, A.A. Pena, and M. Pasquali. Vorticity alignment and negative normal stresses in shearedattractive emulsions.Physical Review Letters, 92(5), 2004.
[8] R.J. Pugh, T. Matsunga, and F.M. Fowkes. The dispersibility and stability of carbon-black in media of lowdielectric-constant. 1. Electrostatic and steric contribution to colloidal Stability .Colloids and surfaces,7(3) :183–207, 1983.
[9] P. Bezot, C. Hesse-Bezot, B. Rousset, and C. Diraison. Effect of polymers on the aggregation kinetics andfractal structure of carbon-black suspensions in an aliphatic solvent. Astatic and dynamic light-scatteringstudy.Colloids and surfaces A-Physicochemical and engineering aspects, 97(1) :53–63, APR 10 1995.
[10] V. Trappe and D.A. Weitz. Scaling of the viscoelasticity of weakly attractive particles. Physical ReviewLetters, 85(2) :449–452, JUL 10 2000.
[11] C.O. Osuji, C. Kim, and D. A. Weitz. Shear thickening and scaling of the elastic modulus in a fractalcolloidal system with attractive interactions.Physical Review E, 77(6, Part 1), 2008.
[12] V. Trappe, E. Pitard, L. Ramos, A. Robert, H. Bissig, and L. Cipelletti. Investigation of q-dependent dyna-mical heterogeneity in a colloidal gel by x-ray photon correlation spectroscopy. Physical Review E, 76(5,Part 1), NOV 2007.
[13] C. O. Osuji and D. A. Weitz. Highly anisotropic vorticity aligned structures in a shear thickening attractivecolloidal system.Soft Matter, 4(7) :1388–1392, 2008.
[14] T. Divoux and J. C. Geminard. Friction and dilatancy in immersed granular matter.Physical Review Letters,99(25), 2007.
[15] S. Lin-Gibson, J.A. Pathak, E.A. Grulke, H. Wang, and E.K. Hobbie. Elastic flow instability in nanotubesuspensions (vol 92, art no 048302, 2004).Physical Review Letters, 92(23), 2004.
[16] F. Pignon, A. Magnin, and J.M. Piau. Butterfly light scattering patternand rheology of a sheared thixotropicclay gel.Physical Review Letters, 79(23) :4689–4692, 1997.
[17] A. Montesi, A.A. Pena, and M. Pasquali. Vorticity alignment and negative normal stresses in shearedattractive emulsions.Physical Review Letters, 92(5), 2004.
20