Cours de Calcul Matriciel - Ian’s Web Page · j lignes de A La transpos´ee est utile dans le...
61
Cours de Calcul Matriciel Yann Mor` ere Mai 2001
Transcript of Cours de Calcul Matriciel - Ian’s Web Page · j lignes de A La transpos´ee est utile dans le...
Cours de Calcul Matriciel
Yann Morere
Mai 2001

Contents
1 Generalites 1
1.1 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Operations elementaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3.1 Egalite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3.2 Somme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3.3 Multiplication par un scalaire . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3.4 Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.5 Transposee d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.6 Derivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.7 Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.8 Tranconjugee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.9 Trace d’une matrice A(m×n) = (aij) . . . . . . . . . . . . . . . . . . . . . 4
1.3.10 Matrice decomposees en blocs (ou partitionnement) . . . . . . . . . . . . 4
2 Operations elementaires, application aux equations lineaires 7
2.1 Matrices echelonnees et canonique ligne . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Algorithme de passage a la forme echelonnee . . . . . . . . . . . . . . . . 7
2.1.2 Algorithme de passage d’une forme echelonnee a une forme canonique ligne 8
2.2 Systeme d’equations lineaires et matrices . . . . . . . . . . . . . . . . . . . . . . 9
3 Espaces vectoriels 13
3.1 Dependance et Independance Lineaire . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Equation lineaire, matrices et espaces vectoriels . . . . . . . . . . . . . . . . . . 14
i
4 Matrices Carrees 17
4.1 Matrices carrees . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.2 Matrices particulieres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.2.1 Matrice Unite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.2.2 Matrice diagonale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.2.3 Puissance et polynome de matrices . . . . . . . . . . . . . . . . . . . . . 17
4.2.4 Matrices inversibles ou non singulieres . . . . . . . . . . . . . . . . . . . 17
4.2.5 Matrice triangulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.6 Matrice symetrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.7 Matrice anti-symetrique . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.8 Matrice orthogonale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.9 Matrice normale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.10 Matrice hermitienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.11 Matrice anti-hermitienne . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.12 Matrice unitaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.13 Matrice normale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3 Matrices elementaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.4 Equivalence entre matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.4.1 Equivalence entre deux matrices . . . . . . . . . . . . . . . . . . . . . . 21
5 Determinants 25
5.1 Proprietes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.2.1 Inverse d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.2.2 Resolution d’un systeme d’equations lineaires . . . . . . . . . . . . . . . 28
6 Inversions Matricielles 31
6.1 Definitions et Proprietes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
7 Equation caracteristique d’une matrice 35
7.1 Definitions, proprietes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
8 Matrices semblables 39
8.1 Definitions et Proprietes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
8.2 Matrices diagonales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
8.3 Matrices symetriques reelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
ii
9 Formes quadratiques 43
9.1 Definition et proprietes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
9.2 Forme quadratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
10 Systemes differenciels 49
10.1 Proprietes et Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10.2 Cas scalaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10.3 Cas matriciel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10.4 Evaluation de eAt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
10.4.1 Calcul numerique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
10.4.2 A diagonale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
10.4.3 Utilisation de la formule de Sylverster . . . . . . . . . . . . . . . . . . . . 50
11 Quelques extras 53
11.1 Forme de Jordan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
11.2 Matrice compagne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
iii

1 / 55
Chapter 1Generalites
1.1 Definitions
Definition 1.1.1. une matrice sur le corps K est un tableau rectangulaire de scalaires aij dela forme :
A =
a11 a12 . . . a1n
a21
...
am1 . . . . . . amn
, A (m× n) = (aij)
avec aij ∈ R,C,R 〈λ〉polynome en λ....
Les m n-uplets (ai1 . . . ain) i ∈ {1 . . . m} sont appeles lignes de A.
Les n m-uplets
a1j
...
amj
j ∈ {1 . . . n} sont appeles colonnes de A.
Le couple (m,n) est appele la dimension de la matrice.
C’est un formalisme simple qui permet de generaliser les manipulations des scalaires (Attention :avec la perte de la commutativite) et de manipuler avec un seul langage des scalaires, desvecteurs et des tableaux.
1.2 Exemples
1. Soit f une fonction reelle de plusieurs variables f (x1, . . . , xn) (x = (x1 . . . xn)) on definitle gradient :
fx =∂f
∂x=
(∂f
∂x1
, . . . ,∂f
∂xn
)

2 / 55 Chapitre 1 : Generalites
matrice ligne du vecteur des derivees partielles.Le Hessien ou matrice Hessienne est definie par :
Hx =
∂2f∂2x1
· · · ∂2f∂x1∂xn
.... . .
...
∂2f∂xm∂x1
· · · ∂2f∂2xn
matrice carree symetrique des derivees secondes.
2. Soit f une fonction vectorielles de plusieurs variables f (x1, . . . , xn)
f1 (x1, . . . , xn)
...
fm (x1, . . . , xn)
on peut alors definir le Jacobien ou matrice Jacobienne :
Fx =
∂f1
∂x1· · · ∂f1
∂xn
.... . .
...
∂fm
∂x1· · · ∂fm
∂xn
.
1.3 Operations elementaires
1.3.1 Egalite
A = B ⇔ ∀ (i, j) aij = bij.
1.3.2 Somme
A + B = (aij + bij)
avec A et B de meme dimension.
1.3.3 Multiplication par un scalaire
kA = (k aij)
Yann MORERE
1.3 Operations elementaires 3 / 55
1.3.4 Multiplication
A (m× p) = (aik) B (p× n) = (bkj)
A ·B (m× n) = (cij)
avec cij =∑p
k=1 aikbkj.
Proprietes :
¤ (AB) C = A (CB)¤ A (B + C) = AB + AC et (A + B) C = AC + BC¤ k (AB) = (kA) B = A (kB)¤ A0 = 0A = 0 zero est la matrice nulle¤ evidement AB 6= BA¤ Si m = n = 1 le resultat du produit est un scalaire¤ Si p = 1 le produit est une matrice pleine m× n
1.3.5 Transposee d’une matrice
AT = A
Les lignes de A sont les colonnes de AT .
a11 a12 . . . a1n
a21. . .
...
.... . .
...
am1 . . . . . . amn
T
=
a11 a21 . . . a1m
a12. . .
...
.... . .
...
a1n . . . . . . amn
.
A(m×n) = (aij) → AT(n×m) =
(aT
ij
)avec aT
ij = aji.
Pour les vecteurs :
(x1 . . . xn)T =
x1
...
xn
Proprietes :
¤ (A + B)T = AT + BT
¤(AT
)T= A
¤ (AB)T = BT AT
¤ (kA)T = kAT
Cours de Calcul Matriciel

4 / 55 Chapitre 1 : Generalites
1.3.6 Derivation
A(m×n) = (aij) avec aij dependant de α.
A (α) = (aij (α))dA (α)
dα=
(daij (α)
dα
)
1.3.7 Integration
∫ α2
α1
A (α) dα =
(∫ α2
α1
aij (α) dα
)
1.3.8 Tranconjugee
Si A est une matrice definie dans un corps operant sur C :
AH = AT
transpose de la conjuge,
avec A(m×n) = (aij), A(m×n) = (aij) et AH(m×n) =
(aT
ij
)=
(aH
ij
)avec aH
ij = aij.
Proprietes :
¤ (A + B)H = AH + BH
¤(AH
)H= A
¤(AH
)T=
(AT
)H= A
1.3.9 Trace d’une matrice A(m×n) = (aij)
trace (A) =
min(m,n)∑i=1
aii
Proprietes :
¤ trace (αA + βB) = αtrace (A) + βtrace (B)¤ trace
(AT
)= trace (A)
¤ trace(AH
)= trace (A)
1.3.10 Matrice decomposees en blocs (ou partitionnement)
A(m×n) =(Aij(m×n)
)avec
∑Ii=1 mi = m et
∑Ii=1 ni = n ce qui est interessant lorsque la matrice
contient des blocs nuls.
1 2 | 3 5
3 4 | 2 2
− − − − −
1 1 | 0 2
=
1 | 2 | 3 5
3 | 4 | 2 2
− | − | − −
1 | 1 | 0 2
Yann MORERE
1.3 Operations elementaires 5 / 55
Exemple de partitionnement important :
A(m×n) = (aij) = (a1, a2, . . . , an) avec ai colonnes de
A =
αT1
...
αTn
, αTj lignes de A
La transposee est utile dans le sens ou un vecteur est une matrice colonne, donc une ligne estun covecteur et
A(m×p) ·B(p×n) =
αT1 × b1 αT
1 × b2 . . . αT1 × bn
......
......
αTm × b1 αT
m × b2 . . . αTm × bn
=(αT
i bj
)
L’interet est quie si l’on dispose de 2 matrices A et B partitionnees telles que les sommes et lesproduits aient un sens :
¤ A = (Aij) , B = (Bij) A + B = (Aij + Bij)¤ C = AB =
∑νk=1 AikBkj avec ν le nombre de blocs en ligne de A et le nombre de blocs en
ligne de B
Exemples :
A(4×5) =
1 2 0 0 0
3 4 0 0 0
0 0 5 1 2
0 0 3 4 1
, B(5×4) =
3 −2 0 0
2 4 0 0
0 0 1 2
0 0 2 −1
0 0 −4 1
AB(4×4) =
1 2
3 4
3 −2
2 4
0(2×2)
0(2×2)
5 1 2
3 4 1
1 2
2 −1
−4 1
=
7 6 0 0
17 2 0 0
0 0 −1 11
0 0 7 3
trace (A) =∑min(4,5)
i=1 aii = 1 + 4 + 5 + 4 = 14, trace (B) =∑min(4,5)
i=1 aii = 3 + 4 + 1− 1 = 7
Cours de Calcul Matriciel
6 / 55 Chapitre 1 : Generalites
AB(5×5) =
3 −2
2 4
1 2
3 4
0(2×2)
0(2×2)
1 2
2 −1
−4 1
5 1 2
3 4 1
AB(5×5) =
−3 −2 0 0 0
14 20 0 0 0
0 0 11 −9 4
0 0 7 −2 3
0 0 −17 0 −7
Montrer que si A possede une ligne nulle, alors AB possede une ligne nulle aussi :
A(m×p) = (a1, . . . , ap) =
αT1
...
αTm
B(p×n) = (b1, . . . , bn) =
βT1
...
βTm
Soit αTi la ligne nulle de A, alors la ime ligne de AB
(αT
i × b1, . . . , αTi × bn
)= (0, . . . , 0)
de meme si B a une colonne nulle, AB a une colonne nulle.
Soit bj la colonne nulle de B, la jme colonne de AB est :
αT1 × bj
...
αTm × bj
=
0
...
0
Yann MORERE

7 / 55
Chapter 2Operations elementaires, application auxequations lineaires
2.1 Matrices echelonnees et canonique ligne
Une matrice A est dite ligne-equivalente a une matrice B (A ∼ B) si B peut etre obtenue apartir de A en effectuant un nombre fini d’operations elementaires :
¤ (E1) : echanger la ime ligne et la jme ligne : αTi ↔ αT
j
¤ (E2) : multiplier la ime ligne par un scalaire non nul k : kαTi → αT
i (k 6= 0)¤ (E3) : remplacer la ime ligne par k fois la jme ligne plus la ime ligne : kαT
j + αTi → αT
i quel’on peut regroupe en une etape
¤ (E) : remplacer la ime ligne par k′ fois la jme ligne plus k fois la ime ligne : k′αTj +kαT
i → αTi
Une matrice est dite echelonnee (est sous forme echelonnee) si :
1. toutes les lignes nulles sont en bas de la matrice
2. chaque element distingue (premier element non nulle d’une ligne αT ) est a droite del’element distingue de la ligne precedente
1 2 3
0 0 1
0 0 0
,
0 1 2 0 3
0 0 2 3 0
0 0 0 1 1
0 0 0 0 1
,
0 1 3 0 0 4
0 0 0 1 0 −2
0 0 0 0 1 1
Une matrice echelonnee A est dite sous forme canonique ligne si :
1. chaque element distingue est egal a 1
2. chaque element distingue est l’unique element non nul dans toute sa colonne
2.1.1 Algorithme de passage a la forme echelonnee
A = (aij) matrice quelconque

8 / 55 Chapitre 2 : Operations elementaires, application aux equations lineaires
1. Appeler j1 la 1re colonne contenant un element non nul
2. Echange les lignes pour que le premier element different de 0 soit dans la 1re ligne, jmei
colonne (a1j1 6= 0)
3. Utiliser a1j1 comme pivot pour obtenir des zeros sous a1j1 , i.e. : pour i > 1 appliquer
(E) : −aij1αT1 + a1j1α
Ti ou −
(aij1
a1j1
)αT
1 + αTi −→ αT
i
4. Recommencer avec la sous-matrice formee de toutes les lignes sauf la 1re
5. Arreter quand la matrice est mise sous forme echelonnee.
Exemple :
A =
1 2 −3 0
2 4 −2 2
3 6 −4 3
a11 = 1, pivot −2αT1 + αT
2 → αT2 , −3αT
1 + αT3 → αT
3
A =
1 2 −3 0
0 0 4 2
0 0 5 3
a23 = 4, pivot −5αT2 + 4αT
3 → αT3
A =
1 2 −3 0
0 0 4 2
0 0 0 2
, forme echelonnee.
2.1.2 Algorithme de passage d’une forme echelonnee a une formecanonique ligne
A = (aij) matrice echelonnee avec a1j1 , a2j2 , . . . , aijielements distingues
1. multiplier la derniere ligne non nulle par 1arjr
pour avoir l’element distingues
2. utiliser arjr = 1 comme pivot pour obtenir des zeros au dessus de arjr , i.e., pour i ∈{1, . . . , r − 1} appliquer : airi
αTi + αT
i → αTi
3. repeter les etapes 1 et 2 sur les lignes αTr−1 a αT
2
4. multiplier la ligne αT1 par 1
arjr
Exemple :
Yann MORERE
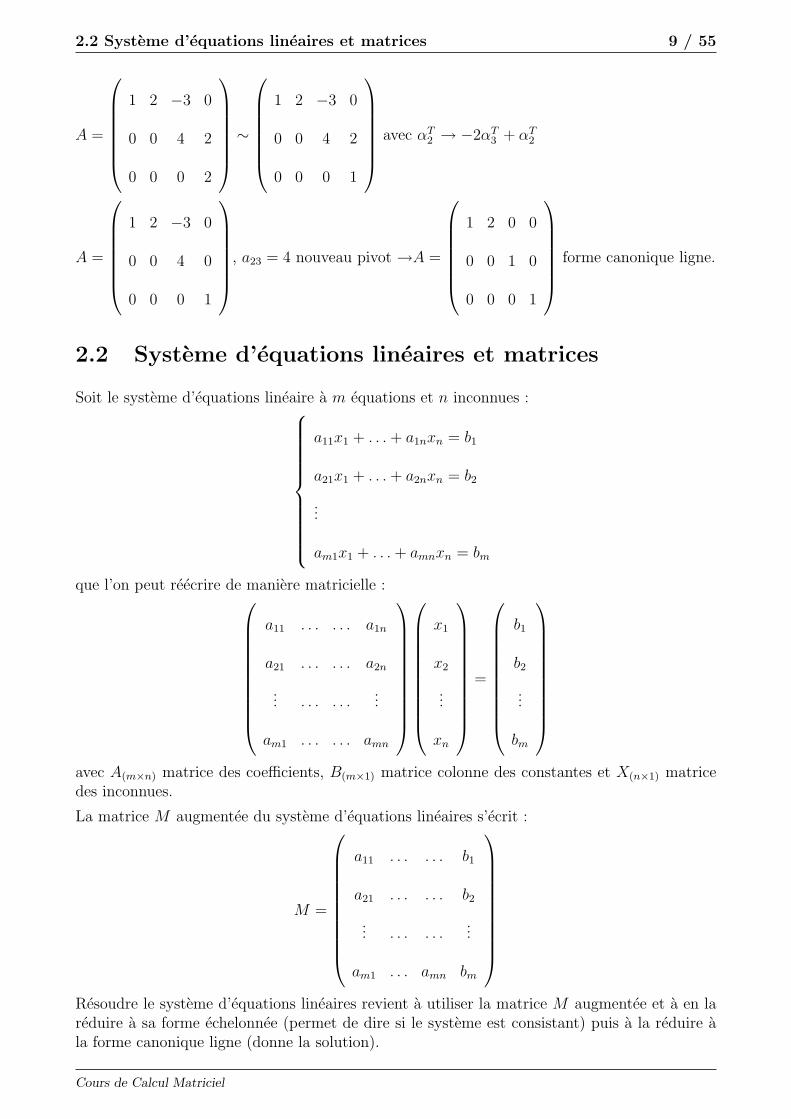
2.2 Systeme d’equations lineaires et matrices 9 / 55
A =
1 2 −3 0
0 0 4 2
0 0 0 2
∼
1 2 −3 0
0 0 4 2
0 0 0 1
avec αT2 → −2αT
3 + αT2
A =
1 2 −3 0
0 0 4 0
0 0 0 1
, a23 = 4 nouveau pivot →A =
1 2 0 0
0 0 1 0
0 0 0 1
forme canonique ligne.
2.2 Systeme d’equations lineaires et matrices
Soit le systeme d’equations lineaire a m equations et n inconnues :
a11x1 + . . . + a1nxn = b1
a21x1 + . . . + a2nxn = b2
...
am1x1 + . . . + amnxn = bm
que l’on peut reecrire de maniere matricielle :
a11 . . . . . . a1n
a21 . . . . . . a2n
... . . . . . ....
am1 . . . . . . amn
x1
x2
...
xn
=
b1
b2
...
bm
avec A(m×n) matrice des coefficients, B(m×1) matrice colonne des constantes et X(n×1) matricedes inconnues.
La matrice M augmentee du systeme d’equations lineaires s’ecrit :
M =
a11 . . . . . . b1
a21 . . . . . . b2
... . . . . . ....
am1 . . . amn bm
Resoudre le systeme d’equations lineaires revient a utiliser la matrice M augmentee et a en lareduire a sa forme echelonnee (permet de dire si le systeme est consistant) puis a la reduire ala forme canonique ligne (donne la solution).
Cours de Calcul Matriciel

10 / 55 Chapitre 2 : Operations elementaires, application aux equations lineaires
1. le systeme admet une solution si et seulement si la forme echelonnee de M ne contientpas de ligne (0, 0, . . . , 0, b) avec b 6= 0 (revient a l’equation degeneree 0x1 + . . . + 0xn = b)
2. dans la forme canonique ligne de la matrice augmentee (sauf les lignes nulles), chaqueelement distingue est le coefficient de l’inconnu principale correspondante dans le systeme.Les variables constantes sont les variables libres.
Theoreme 2.2.1. Un systeme d’equation admet ou une solution, ou une infinite (systemeconsistant), ou aucune (systeme inconsistant).
Exemple 1 :
x + y − 2z + 4t = 5
2x + 2y +−3z + t = 3
3x + 3y − 4z − 2t = 1
on a donc M =
1 1 −2 4 5
2 2 −3 1 3
3 3 −4 −2 1
∼
1 1 −2 4 5
0 0 1 −7 −7
0 0 2 −14 −14
puis M =
1 1 −2 4 5
0 0 1 −7 −7
0 0 0 0 0
∼
1 1 0 −10 −9
0 0 1 −7 −7
, les variables libres sont y et t,
les inconnues principales :
x = −y + 10t− 9
z = 7t− 7
Exemple 2 :
x1 + x2 − 2x3 + 3x4 = 4
2x1 + 3x2 + 3x3 − x4 = 3
5x1 + 7x2 + 4x3 + x4 = 5
qui donne :
M =
1 1 −2 3 4
2 3 3 −1 3
5 7 4 1 5
∼
1 1 −2 3 4
0 1 7 −7 −5
0 2 14 −14 −15
∼
1 1 −2 3 4
0 1 7 −7 −5
0 0 0 0 −5
.
Le systeme n’a aucune solution.
Exemple 3 :
Yann MORERE
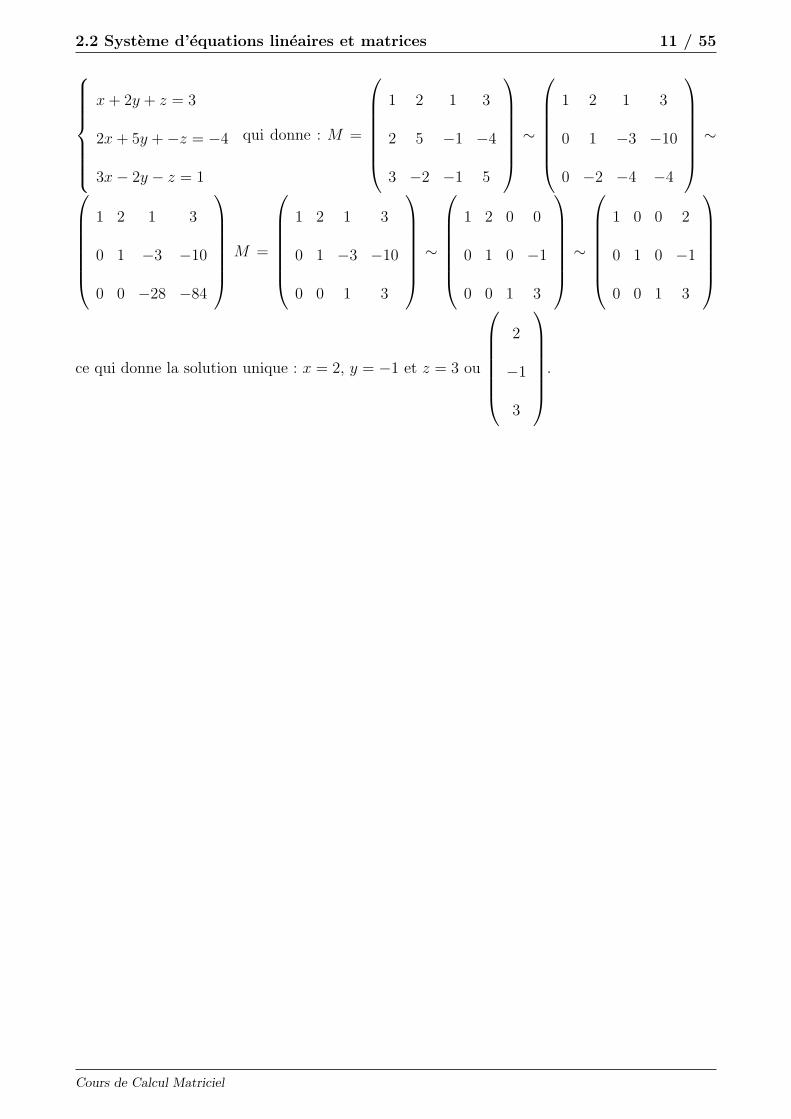
2.2 Systeme d’equations lineaires et matrices 11 / 55
x + 2y + z = 3
2x + 5y +−z = −4
3x− 2y − z = 1
qui donne : M =
1 2 1 3
2 5 −1 −4
3 −2 −1 5
∼
1 2 1 3
0 1 −3 −10
0 −2 −4 −4
∼
1 2 1 3
0 1 −3 −10
0 0 −28 −84
M =
1 2 1 3
0 1 −3 −10
0 0 1 3
∼
1 2 0 0
0 1 0 −1
0 0 1 3
∼
1 0 0 2
0 1 0 −1
0 0 1 3
ce qui donne la solution unique : x = 2, y = −1 et z = 3 ou
2
−1
3
.
Cours de Calcul Matriciel

13 / 55
Chapter 3Espaces vectoriels
Notations :
K corps des scalaires, a, b, c, k ∈ K (en general R ou C).V l’espace vectoriel u, v, w ∈ V .
Definition 3.0.1. K, un corps, V un ensemble non vide muni de deux lois, + et × par unscalaire (u, v, w ∈ V , u+ v ∈ V ), V est appele espace vectoriel sur K (ses elements sont appelesdes vecteurs), si les axiomes suivants sont verifies :
¤ ∀u, v, w ∈ V (u + v) + w = u + (v + w)¤ ∃V note 0 appele vecteur nul tel que u + 0 = 0 + u = u ∀u ∈ V¤ ∀u ∈ V , il existe un vecteur de V , note −u tel que u + (−u) = 0¤ ∀u, v ∈ V u + v = v + u (V est donc un espace commutatif par rapport a l’operateur somme
+)¤ ∀k ∈ K, ∀ (u, v) ∈ V k (u + v) = ku + kv¤ ∀a, b ∈ K, ∀u ∈ V (a + b) u = au + bu¤ ∀a, b ∈ K, ∀u ∈ V (ab) u = a (bu)¤ pour le scalaire unite 1 ∈ K 1u = u ∀u ∈ V
Exemples :
Rn,Cn plus generalement Kn (K corps)
Mm,n matrices de dimension m× n sur le corps K
P (t) espace vectoriel des polynomes.
3.1 Dependance et Independance Lineaire
Definition 3.1.1. Soit V un espace vectoriel sur le corps K, les vecteurs v1, . . . , vm ∈ V sontlineairement dependants sur K, ou dependants (plus simplement) si ∃a1, . . . , am ∈ K non nuls| a1v1 + · · ·+ amvm = 0, sinon ils sont independants.
Definition 3.1.2. Un ensemble S = {u, . . . , un} est une base de V si :¤ u, . . . , un sont lineairement independants,

14 / 55 Chapitre 3 : Espaces vectoriels
¤ u, . . . , un engendrent V (tout vecteur de V peut s’ecrire comme une combinaison lineaire deselements de S)
V est dit espace vectoriel de dimention n.
Exemple :
(1, 0, 0, 0) (0, 1, 0, 0) (0, 0, 1, 0) et (0, 0, 0, 1) forment une base de R4 de facon evidente et dimR4 =4.
1, t, t2, t3, . . . , tn forment une base de Pn (t) et dimPn (t) = n + 1.
3.2 Equation lineaire, matrices et espaces vectoriels
Theoreme 3.2.1. Les lignes non nulles d’une matrice mise sous forme echelonnee sont lineai-rement independantes.
Rang d’une matrice :
Definition 3.2.1. rang en ligne = nombre maximum de lignes lineairement independantes,
rang en colonne = nombre maximum de colonnes lineairement independantes.
Theoreme 3.2.2. rang en ligne de A(m×n)= rang en colonne.
Pour determiner le rang d’une matrice, on peut utiliser sa forme echelonnee.
Exemple :
A =
1 2 0 −1
2 6 −3 −3
3 10 −6 −5
∼
1 2 0 −1
0 2 −3 −1
0 4 −6 −2
∼
1 2 0 −1
0 2 −3 −1
0 0 0 0
, on a deux lignes
differentes de 0 donc rangA = 2.
On repart de :
a11x1 + . . . + a1nxn = b1
a21x1 + . . . + a2nxn = b2
...
am1x1 + . . . + amnxn = bm
Yann MORERE

3.2 Equation lineaire, matrices et espaces vectoriels 15 / 55
AX = B avecA =
a11 . . . . . . a1n
a21 . . . . . . a2n
... . . . . . ....
am1 . . . . . . amn
et la matrice augmentee
M = (A,B) =
a11 . . . . . . b1
a21 . . . . . . b2
... . . . . . ....
am1 . . . amn bm
.
Theoreme 3.2.3. Les trois proprietes sont equivalentes :
1. AX = B admet une solution,
2. B est une combinaison lineaire des colonnes de A
3. La matrice A et la matrice augmentee (A,B) ont le meme rang
¤ si rang (A) = rang (A,B) = n, on a une solution unique,¤ si rang (A) = rang (A,B) < n, on a une infinite de solution,¤ si rang (A) < rang (A,B), il n’y a pas de solution.
Cours de Calcul Matriciel

17 / 55
Chapter 4Matrices Carrees
4.1 Matrices carrees
Le nombre de lignes = le nombre de colonnes. A(n×n) matrices carrees d’ordre n.
L’ensemble Mn des matrices carrees d’ordre n est un algebre de matrices.
4.2 Matrices particulieres
4.2.1 Matrice Unite
C’est une matrice carree d’ordre n dont les elements diagonaux sont egaux a 1 et les autressont nuls. aii = 1, ∀i ∈ {1, . . . , n} et aij = 0, ∀i 6= j. Cette matrice est notee Inet possede lepropriete suivante : AI = IA = A ∀A.
4.2.2 Matrice diagonale
aij = 0 ∀i 6= j A = {a11, . . . , ann}
4.2.3 Puissance et polynome de matrices
A2 = AA, An+1 = AnA et A0 = I
si f (x) = a0 + a1x + . . . + anxn alors f (A) = a0I + a1A + · · ·+ anA
n
Propriete 4.2.1. f (x), g (x) deux polynomes, A matrice carree d’ordre n(f + g) (A) = f (A) + g (A)(fg) (A) = f (A) g (A) = g (A) f (A)
4.2.4 Matrices inversibles ou non singulieres
A est dite non singuliere si ∃B AB = BA = I. B est unique et se note B = A−1 et s’appellel’inverse de A.

18 / 55 Chapitre 4 : Matrices Carrees
Exemple :
A =
a b
c d
admet pour inverse si ad− bc 6= 0, A−1 = 1
ad−bc
d −b
−c a
.
Theoreme 4.2.1. A(n×n) est inversible si et seulement si rangA = n
4.2.5 Matrice triangulaire
A(n×n) = (aij) triangulaire superieure si aij = 0 ∀i > j.
Propriete 4.2.2. L’ensemble des matrices triangulaires superieures est une algebre de ma-trices :
1. A + B triangulaire superieure avec sur la diagonale aii + bii
2. kA triangulaire superieure avec sur la diagonale kaii
3. AB triangulaire superieure avec sur la diagonale aiibii
4. polynome f (x) · f (A) triangulaire superieure avec sur la diagonale f (aii)
5. A est inversible si et seulement si ∀i aii 6= 0
A(n×n) = (aij) triangulaire superieure si aij = 0 ∀i < j.
4.2.6 Matrice symetrique
A = AT (aij = aji ∀i, j)
4.2.7 Matrice anti-symetrique
A = −AT (aij = −aji ∀i, j) et donc aii = 0, ∀i.Theoreme 4.2.2. Si A est une matrice carree A + AT est symetrique, A − AT est anti-symetrique, A = B + C ou B symetrique, C anti-symetrique.
Il suffit de prendre B = 12
(A + AT
), C = 1
2
(A− AT
).
4.2.8 Matrice orthogonale
AAT = AT A = I ou A−1 = AT
4.2.9 Matrice normale
A · AT = AT · A ce qui inclut les matrices symetriques, orthogonales et anti-symetriques.
4.2.10 Matrice hermitienne
AH = A (A = A) (aij = aji ⇒ aii ∈ R)
Yann MORERE

4.3 Matrices elementaires 19 / 55
4.2.11 Matrice anti-hermitienne
AH = −A (A = −A) (aij = −aji ⇒ aii = 0)
4.2.12 Matrice unitaire
AH = A−1
4.2.13 Matrice normale
AAH = AHA
4.3 Matrices elementaires
Operations elementaires (Operations E1, E2, E3)
¤ (E1) echange de lignes αTi ↔ αT
j
¤ (E2) kαTi → αT
i (k 6= 0)¤ (E3) kαT
j + αTi → αT
i
Operations inverses
¤ αTj ↔ αT
i
¤ 1kαT
i → αTi
¤ −kαTj + αT
i → αTi
B est dite ligne-equivalente a A (A ∼ B) si B peut etre obtenue a partie de A en utilisantun nombre fini d’operations elementaires sur les lignes. Comme il est possible de refaire lechemin inverse, le ligne-equivalence est une relation d’equivalence(A ∼ A, A ∼ B⇔B ∼ A,A ∼ B et B ∼ C⇒A ∼ C).
Theoreme 4.3.1. Toute matrice A est ligne equivalente a une matrice unique sous formeconique ligne.
Soit e une operation elementaire sur les lignes, e (A) son resulat sur A. Soit E la matrice obtenueen applicant e sur I : E = e (I).
Exemple :
αT2 ↔ αT
3 E =
1 0 0
0 0 1
0 1 0
, −6αT2 ↔ αT
2 E =
1 0 0
0 −6 0
0 0 1
, −4αT1 + αT
3 ↔ αT3 E =
1 0 0
0 1 1
−4 0 1
.
Cours de Calcul Matriciel

20 / 55 Chapitre 4 : Matrices Carrees
Theoreme 4.3.2. e, une operation elementaire sur les lignes, E une matrice carree elementaired’ordre m : E = e (Im) , ∀A(m×n) e (A) = EA.
Exemple :
1 −1 2
0 2 3
3 1 3
∼
1 −1 2
3 1 3
0 2 3
, αT2 → αT
3
et
1 −1 2
3 1 3
0 2 3
= e (A) =
1 0 0
0 0 1
0 1 0
1 −1 2
0 2 3
3 1 3
= E · A
Theoreme 4.3.3. Les proprietes suivantes sont equivalentes :
1. A est inversible (non singuliere)
2. A est ligne-equivalente a la matrice identite I
3. A est un produit de matrice elementaire
ce qui indique qu’on peut passer de A a I par une suite finie d’operations.
Algorithme :
1. Former la matrice n× 2n (par blocs) M = (A, I)
2. Reduire M a la forme echelonnee, si dans la moitie gauche apparaissent des lignes nulles,A n’est pas inversible.
3. Reduire M a la forme canonique ligne (I, B) et B = A−1
Exemple :
A =
1 0 2
2 −1 3
4 1 8
M =
1 0 2 | 1 0 0
2 −1 3 | 0 1 0
4 1 8 | 0 0 1
∼
1 0 2 | 1 0 0
2 −1 −1 | −2 1 0
0 1 0 | −4 0 1
M ∼
1 0 2 | 1 0 0
0 −1 −1 | −2 1 0
0 0 −1 | −6 1 1
∼
1 0 2 | 1 0 0
0 −1 −1 | −2 1 0
0 0 1 | 6 −1 −1
Yann MORERE

4.4 Equivalence entre matrices 21 / 55
M ∼
1 0 0 | −11 2 2
0 −1 0 | −4 0 −1
0 0 1 | 6 −1 −1
∼
1 0 0 | −11 2 2
0 1 0 | −4 0 1
0 0 1 | 6 −1 −1
d’ou A−1A =
1 0 0
0 1 0
0 0 1
avec A−1 =
−11 2 2
−4 0 1
6 −1 −1
4.4 Equivalence entre matrices
Theoreme 4.4.1. B est ligne equivalente a A si et seulement si il existe une matrice nonsinguliere P telle que B = PA.
On peut aussi travailler sur les colonnes et definir 3 operations elementaires sur les colonnes.
¤ (F1) ci ↔ cj
¤ (F2) kci → ci
¤ (F3) kcj + ci → ci
de la meme facon que pour les lignes, ces operations sont inversibles, et la matrice elementaireassociee a chaque operation elementaire f est : F = f (I).
Lemme 4.4.1. A une matrice quelconque. f (A) =(e(AT
))Tet f (A) = AF et AF = f (A)
puis(e(AT
))T=
(EAT
)T= AET donc F = ET .
Theoreme 4.4.2. B est colonne equivalente a A si et seulement si il existe une matrice non-singuliere Q telle que B = AQ.
4.4.1 Equivalence entre deux matrices
Definition 4.4.1. une matrice B est dite equivalente a A si B peut etre obtenue a partir deA par une suite d’operations elementaires sur les lignes et les colonnes. B est donc equivalentea A si il existe deux matrices non singulieres P et Q telles que : B = PAQ.
Theoreme 4.4.3. toute matrice A(m×n) est equivalente a l’unique matrice par blocs
Ir | 0
− + −
0 | 0
appelee forme de SMITH ou Irest la matrice identite d’odre r et r = rang (A).
Theoreme 4.4.4. Deux matrices de memes dimensions sont equivalentes si et seulement sielles ont le meme rang.
Cours de Calcul Matriciel
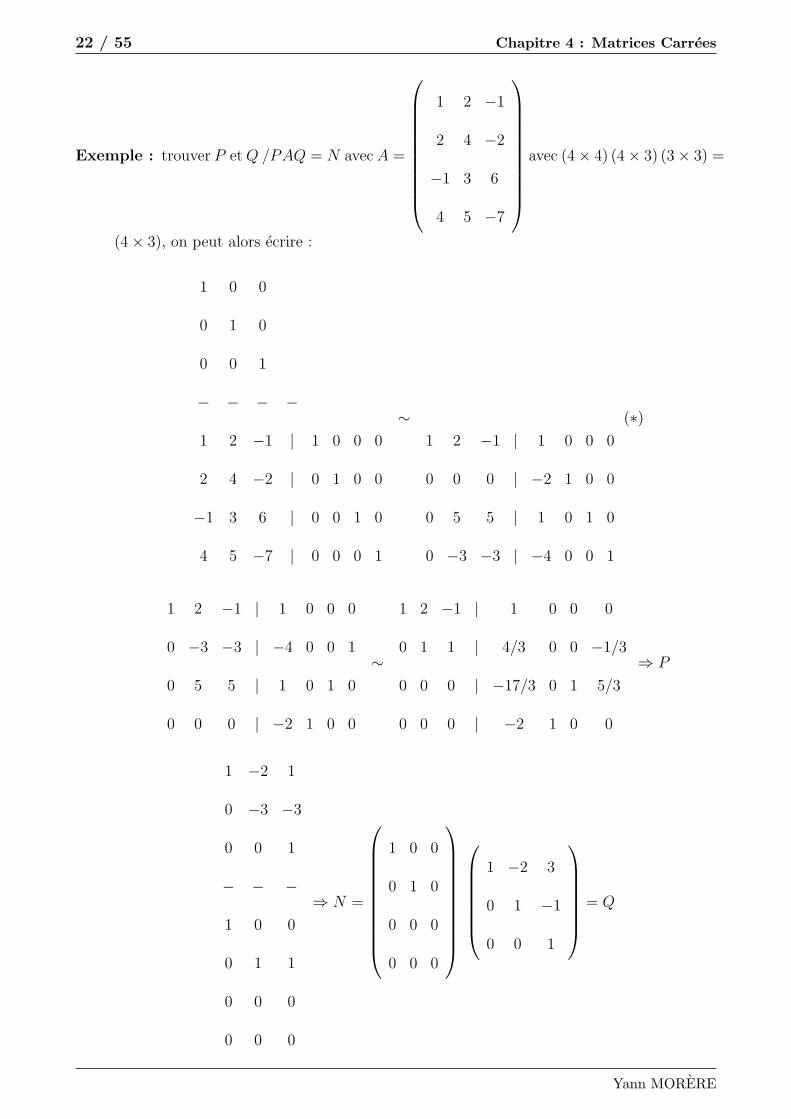
22 / 55 Chapitre 4 : Matrices Carrees
Exemple : trouver P et Q /PAQ = N avec A =
1 2 −1
2 4 −2
−1 3 6
4 5 −7
avec (4× 4) (4× 3) (3× 3) =
(4× 3), on peut alors ecrire :
1 0 0
0 1 0
0 0 1
− − − −
1 2 −1 | 1 0 0 0
2 4 −2 | 0 1 0 0
−1 3 6 | 0 0 1 0
4 5 −7 | 0 0 0 1
∼1 2 −1 | 1 0 0 0
0 0 0 | −2 1 0 0
0 5 5 | 1 0 1 0
0 −3 −3 | −4 0 0 1
(∗)
1 2 −1 | 1 0 0 0
0 −3 −3 | −4 0 0 1
0 5 5 | 1 0 1 0
0 0 0 | −2 1 0 0
∼
1 2 −1 | 1 0 0 0
0 1 1 | 4/3 0 0 −1/3
0 0 0 | −17/3 0 1 5/3
0 0 0 | −2 1 0 0
⇒ P
1 −2 1
0 −3 −3
0 0 1
− − −
1 0 0
0 1 1
0 0 0
0 0 0
⇒ N =
1 0 0
0 1 0
0 0 0
0 0 0
1 −2 3
0 1 −1
0 0 1
= Q
Yann MORERE

4.4 Equivalence entre matrices 23 / 55
evidemment P et Q ne sont pas uniques : au lieu d’echanger la ligne 4 avec la ligne 2onpeut faire :
(∗) ∼
1 2 −1 | 1 0 0 0
0 5 5 | 1 0 1 0
0 −3 −3 | −4 0 0 1
0 0 0 | −2 1 0 0
∼
1 2 −1 | 1 0 0 0
0 1 1 | 1/5 0 1/5 0
0 0 0 | −17/5 0 3/5 1
0 0 0 | −2 1 0 0
et
P2 =
1 0 0 0
1/5 0 1/5 0
−17/5 0 3/5 1
−2 1 0 0
et la matrice est de rang 2.
Cours de Calcul Matriciel


25 / 55
Chapter 5Determinants
5.1 Proprietes
Soit une matrice carree A(m×n) = (aij), soit P = {des n! permutations sur n indices} = {a1j1 , a2j2 , . . . , anjn} etεj1...jn = 1 ou −1 suivant que la permutation est paire ou impaire (nombre d’intervention estpair ou impair 123 et 312 sont paires et 132 et 321 sont impaires) alors :
det (A) = |A| =∑p∈P
(−1)i+j aij
∣∣A{ij}∣∣
Developpement suivant la ime ligne :
|A| =n∑
j=1
(−1)i+j aij
∣∣A{ij}∣∣
A{ij} etant la mineure (ou sous-matrice carree) de A obtenue en eliminant la ime ligne et lajmecolonne.
Developpement suivant la jmecolonne :
|A| =n∑
i=1
(−1)i+j aij
∣∣A{ij}∣∣
Exemple :
∣∣∣∣∣∣∣∣∣∣∣∣
1 0 6
3 4 15
5 6 21
∣∣∣∣∣∣∣∣∣∣∣∣
= 1
∣∣∣∣∣∣∣∣
4 15
6 21
∣∣∣∣∣∣∣∣+ 6
∣∣∣∣∣∣∣∣
3 4
5 6
∣∣∣∣∣∣∣∣developpement par rapport a la premiere ligne.
= −6 + (−12) = −18.
ou encore 4
∣∣∣∣∣∣∣∣
1 6
5 21
∣∣∣∣∣∣∣∣+ (−1)5 6
∣∣∣∣∣∣∣∣
1 6
3 15
∣∣∣∣∣∣∣∣= −36 + 18 = −18.

26 / 55 Chapitre 5 : Determinants
Propriete 5.1.1.¤ Si B est obtenue a partir de A en echangeant deux de ses lignes (colonnes) alors |B| = − |A|¤ Si B est obtenue a partir de A en miltipliant une ligne (colonne) par un scalaire k alors :|B| = k |A|
¤ Si B est obtenue a partir de A an ajoutant a la ime ligne (colonne) le produit d’un scalairepar une autre ligne (colonne) alors : |B| = |A|
¤ Si A est une matrice diagonale ou triangulaire : |A| = ∏ni=1 aii
¤ |A| =∣∣AT
∣∣,∣∣AH
∣∣ = |A| et |kA| = kn |A|¤ |A| |B| = |AB|
Theoreme 5.1.1. Le determinant d’une matrice est proportionnel au determinant de sa formede Smith car PAQ = N avec P et Q regulieres |PQ| |A| = |N |.
Corollaire 5.1.2. A est reguliere si et seulement si |A| 6= 0, A est reguliere rang A = n ⇒N = In et A = P−1Q−1 et |A| 6= 0.
Definition 5.1.1.¤ Mineur : determinant d’une mineure de A,¤ Cofacteur de l’element aij : Cij = (−1)i+j
∣∣A{ij}∣∣. (A{ij} mineur de A obtenue en eliminant
la ime ligne et la jme colonne),¤ Comatrice : matrice des cofacteurs com (A) = (Cij),
¤ Adjointe : transposee de la comatrice adj (A) = (Cji) = com (A)T .
Exemple : A =
1 2 3
2 3 2
1 2 2
C11 =
∣∣∣∣∣∣∣∣
3 2
2 2
∣∣∣∣∣∣∣∣= 2, C12 = −
∣∣∣∣∣∣∣∣
2 2
1 2
∣∣∣∣∣∣∣∣= −2, C13 =
∣∣∣∣∣∣∣∣
2 3
1 2
∣∣∣∣∣∣∣∣= 1,
C21 = −
∣∣∣∣∣∣∣∣
2 3
3 2
∣∣∣∣∣∣∣∣= 2, C22 =
∣∣∣∣∣∣∣∣
1 3
1 2
∣∣∣∣∣∣∣∣= −1, C23 =
∣∣∣∣∣∣∣∣
1 2
1 2
∣∣∣∣∣∣∣∣= 0,
C31 =
∣∣∣∣∣∣∣∣
2 3
3 2
∣∣∣∣∣∣∣∣= −5, C32 = −
∣∣∣∣∣∣∣∣
1 3
2 2
∣∣∣∣∣∣∣∣= 4, C33 =
∣∣∣∣∣∣∣∣
1 2
2 3
∣∣∣∣∣∣∣∣= −1,
d’ou :
com (A) =
2 −2 1
2 −1 0
−5 4 −1
, adj (A) =
2 2 −5
−2 −1 4
1 0 −1
.
Yann MORERE
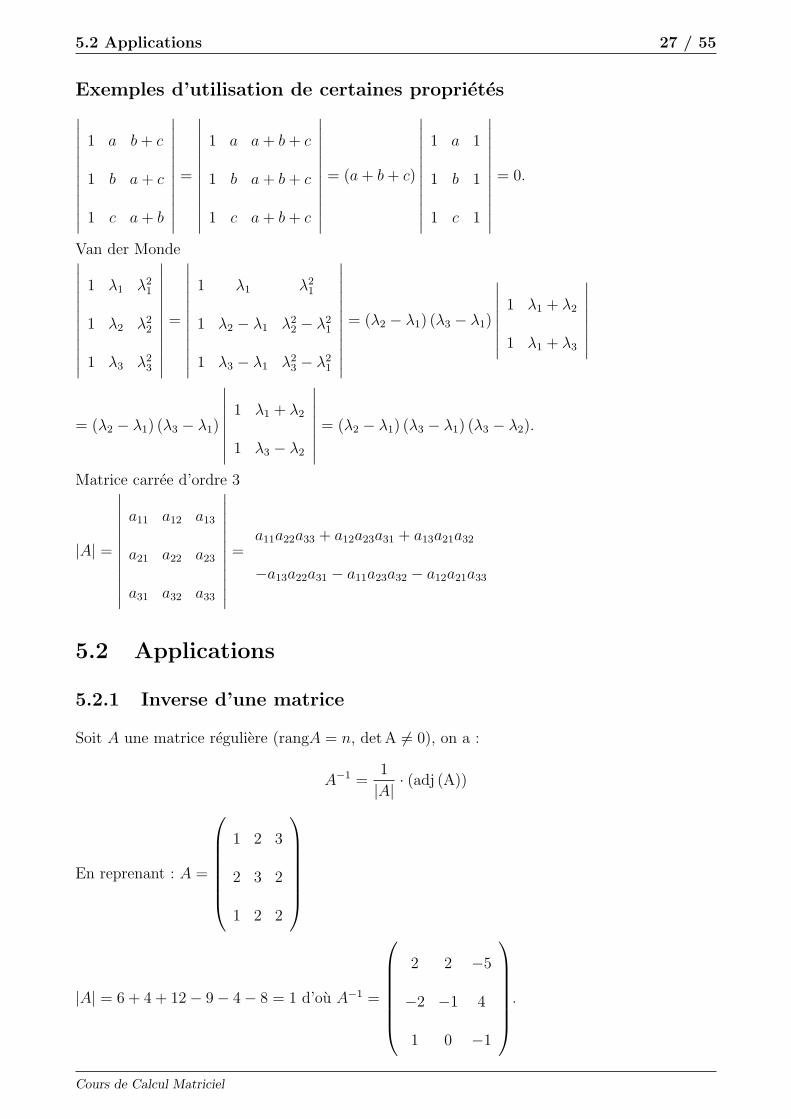
5.2 Applications 27 / 55
Exemples d’utilisation de certaines proprietes∣∣∣∣∣∣∣∣∣∣∣∣
1 a b + c
1 b a + c
1 c a + b
∣∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣∣∣
1 a a + b + c
1 b a + b + c
1 c a + b + c
∣∣∣∣∣∣∣∣∣∣∣∣
= (a + b + c)
∣∣∣∣∣∣∣∣∣∣∣∣
1 a 1
1 b 1
1 c 1
∣∣∣∣∣∣∣∣∣∣∣∣
= 0.
Van der Monde∣∣∣∣∣∣∣∣∣∣∣∣
1 λ1 λ21
1 λ2 λ22
1 λ3 λ23
∣∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣∣∣
1 λ1 λ21
1 λ2 − λ1 λ22 − λ2
1
1 λ3 − λ1 λ23 − λ2
1
∣∣∣∣∣∣∣∣∣∣∣∣
= (λ2 − λ1) (λ3 − λ1)
∣∣∣∣∣∣∣∣
1 λ1 + λ2
1 λ1 + λ3
∣∣∣∣∣∣∣∣
= (λ2 − λ1) (λ3 − λ1)
∣∣∣∣∣∣∣∣
1 λ1 + λ2
1 λ3 − λ2
∣∣∣∣∣∣∣∣= (λ2 − λ1) (λ3 − λ1) (λ3 − λ2).
Matrice carree d’ordre 3
|A| =
∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣∣∣∣∣∣∣
=a11a22a33 + a12a23a31 + a13a21a32
−a13a22a31 − a11a23a32 − a12a21a33
5.2 Applications
5.2.1 Inverse d’une matrice
Soit A une matrice reguliere (rangA = n, det A 6= 0), on a :
A−1 =1
|A| · (adj (A))
En reprenant : A =
1 2 3
2 3 2
1 2 2
|A| = 6 + 4 + 12− 9− 4− 8 = 1 d’ou A−1 =
2 2 −5
−2 −1 4
1 0 −1
.
Cours de Calcul Matriciel

28 / 55 Chapitre 5 : Determinants
5.2.2 Resolution d’un systeme d’equations lineaires
Regle de Cramer
Soit A une matrice carree d’ordre n et K un vecteur colonne d’ordre n, si |A| 6= 0, le systemed’equations lineaires AX = K possede une solution unique : X = (x1, . . . , xn)T donnee par
xi = |Ai||A| i = 1, 2, . . . n avec Ai la matrice obtenue a partir de A en remplacant la ime colonn
epar K.
Exemple :
r + 2s + t = 4
r − s + t = 5
2r + 3s− t = 1
⇒
1 2 1
1 −1 1
2 3 −1
r
s
t
=
4
5
1
. Le determinant de A
vaut : |A| =
∣∣∣∣∣∣∣∣∣∣∣∣
3 5 0
3 2 0
2 3 −1
∣∣∣∣∣∣∣∣∣∣∣∣
= 9. Les solution sont les suivantes :
r =
∣∣∣∣∣∣∣∣∣∣∣∣
4 2 1
5 −1 1
1 3 −1
∣∣∣∣∣∣∣∣∣∣∣∣9
=
∣∣∣∣∣∣∣∣∣∣∣∣
5 5 0
6 2 0
−1 −1 −1
∣∣∣∣∣∣∣∣∣∣∣∣9
=20
9
s =1
9
∣∣∣∣∣∣∣∣∣∣∣∣
1 4 1
1 5 1
2 1 −1
∣∣∣∣∣∣∣∣∣∣∣∣
=1
9
∣∣∣∣∣∣∣∣∣∣∣∣
3 5 0
3 6 1
2 1 −1
∣∣∣∣∣∣∣∣∣∣∣∣
= −1
3
t =1
9
∣∣∣∣∣∣∣∣∣∣∣∣
1 2 4
1 −1 5
2 3 1
∣∣∣∣∣∣∣∣∣∣∣∣
=1
9
∣∣∣∣∣∣∣∣∣∣∣∣
1 2 4
0 −3 1
0 −1 −7
∣∣∣∣∣∣∣∣∣∣∣∣
=22
9
X =
209
−13
229
Si le determinant |A| = 0 on ne peut pas resoudre, il faut alors utiliser la methoded’elimination de Gauss-Jordan.
Yann MORERE

5.2 Applications 29 / 55
Matrices partitionnees : formule de Schur Si A est diagonale par blocs ou triangulairepar blocs.
A =
A11 A12 · · · A1n
0. . . . . .
...
.... . . . . . An−1n
0 · · · 0 Ann
(les matrices Aii sont carres, i ∈ {1, . . . , n}), alors : |A| = |A11| |A22| . . . |Ann|.
Soit une matrice partitionnee de la forme : A =
A11 A12
A21 A22
avec A11 et A22 carrees. Les
resultats suivants constituent les formules de Schur :
¤ Si A11est reguliere :|A| = |A11|
∣∣A22 − A21A−111 A12
∣∣
(car avec V =
I 0
−A21A−111 I
, V A =
A11 A12
0 A22 − A21A−11A12
puis |V A| = |V | |A| =
|A|).¤ Si A22 est reguliere :
|A| = |A22|∣∣A11 − A12A
−122 A21
∣∣
Application
Soient A(m×n) et B(n×m), |Im − AB| = |Im −BA|.
Considerons la matrice M =
Im A(m×n)
B(n×m) In
a l’aide de la forme de Schur :
|M | = |Im| |In −BA| = |In| |Im − AA|
Cours de Calcul Matriciel


31 / 55
Chapter 6Inversions Matricielles
6.1 Definitions et Proprietes
Definition 6.1.1. B/BA = BA = I, B = A−1, A est reguliere et non singuliere. A estinversible si rangA = n ou det A 6= 0.
Propriete 6.1.1. (AB)−1 = (B−1) (A−1), (A−1)T
=(AT
)−1, (A−1)
H=
(AH
)−1, dA−1(α)
dα=
−A−1 (α) dA(α)dα
A−1 (α) (car A (α) A−1 (α) = I ⇒ A (α) dA−1(α)dα
+ dA(α)dα
A−1 (α) = 0)
Lemme 6.1.1. d’inversion matricielle : soit une matrice A + BCD reguliere et A et C regu-liere :
(A + BCD)−1 = A−1 − A−1B(C−1 + DA−1B
)−1DA−1.
Remarque 6.1.1. Si B matrice colonne, D matrice ligne et C scalaire 6= 0
(A + BCD)−1 = A−1 − C
1 + CDA−1BA−1BDA−1
Inverse de matrices partitionnees
Soit A une matrice reguliere
A =
A11(p×p)A12(p×q)
A21(q×p)A22(q×q)
avec A11 et A22 carree et
A−1 =
X11(p×p)X12(p×q)
X21(q×p)X22(q×q)
avec AA−1 = A−1A = I.
X11A11 + X12A21 = A11X11 + A12X21 = I si A est reguliere.
X11A12 + X12A22 = A11X12 + A12X22 = 0
X21A11 + X22A21 = A21X11 + A22X21 = 0

32 / 55 Chapitre 6 : Inversions Matricielles
X21A12 + X22A22 = A21X12 + A22X22 = I → X12 = −A−111 A12X22, X21 = −X22A21A
−111 , X11 =
A−111 − A−1
11 A12X21 ⇒ X11 = A−111 + A−1
11 A12X22A21A−111 .
(A22 − A21A
−111 A12
)X22 = I or X22 existe puisque A−1 existe donc :
X22 =(A22 − A21A
−111 A12
)−1
d’ou :
X11 = A−111 + A−1
11 A12X22A21A−111
X12 = −A−111 A12X22
X21 = −X22A21A−111
Si A11 est singuliere on utilise A22 en lieu et place de A11 et :
X11 =(A11 − A12A
−122 A21
)−1
X12 = −X11A12A−122
X21 = −A−122 A21X11
X22 = A−122 + A−1
22 A21X11A12A−122
Formules permettant par recurrence decroissante de calculer l’inverse d’une matrice :
M((n+1)×(n+1)) =
A(n×m) bn
cTn an
avec bn(n×1), cT
n(1×n)et an(1×1)
.
M−1 =
X −X bm
an
− cTn
anX 1
a2n
(an + cT
nXbn
)
et X =(A− bncT
n
an
)−1
.
Exemple : A =
1 3 3
1 4 3
1 3 4
, A =
1 3
1 4
, b2 =
3
3
, cT
2 =
(1 3
), a2 = 4.
X =
1 3
1 4
− 1
4
3 9
3 9
−1
=
14
34
14
74
=
74
−34
−14
14
−1
· 4
Yann MORERE
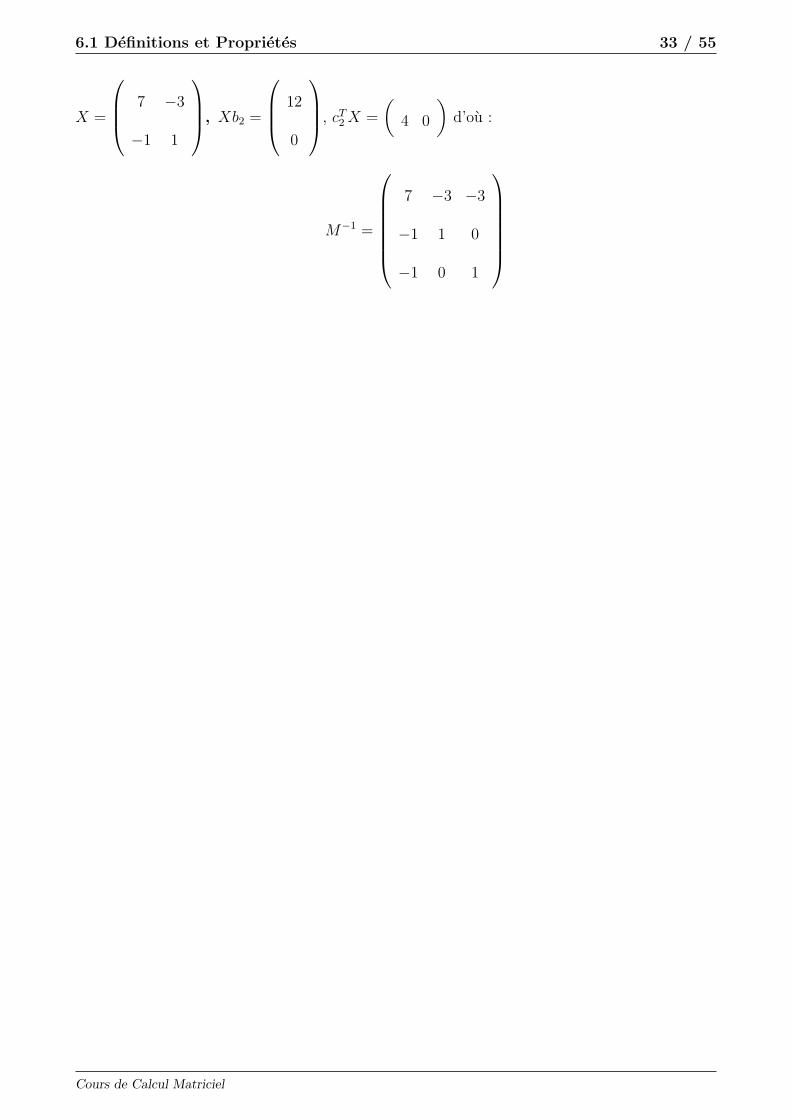
6.1 Definitions et Proprietes 33 / 55
X =
7 −3
−1 1
, Xb2 =
12
0
, cT
2 X =
(4 0
)d’ou :
M−1 =
7 −3 −3
−1 1 0
−1 0 1
Cours de Calcul Matriciel

35 / 55
Chapter 7Equation caracteristique d’une matrice
7.1 Definitions, proprietes
Soit A(n×n) une matrice carree, on appelle valeurs propres les valeurs complexes qui rendentsingulieres sa matrice caracteristique λIm − A.
Elles sont donc racines de |λIm − A| = 0.
Elles verifient : AX = XA.
Tout vecteur X non nul verifiant cette egalite est appele vecteur propre. L’espace engendre parles vecteurs propres s’appelle l’espace propre.
P (λ) = |λIm − A| s’appelle le polynome caracteristique de A, il est de degre n en λ :
P (λ) = λn + αn−1λn−1 + · · ·+ α1λ
En ecrivant : P (λ) = (λ− λ1) (λ− λ2) . . . (λ− λm) avec λi les vecteurs propres alors :
αn−1 = −n∑
i=1
λi = −trace (A)
α0 = (−1)nn∏
i=1
λi = (−1)n |A|
Si n = 2 on a donc :P (λ) = |λI − A| = λ2 − trace (A) λ + |A|
Exemple : Trouver les valeurs et vecteurs propres associes a A =
2 2 1
1 3 1
1 2 2
|λI − A| =
∣∣∣∣∣∣∣∣∣∣∣∣
λ− 2 2 1
1 λ− 3 1
1 2 λ− 2
∣∣∣∣∣∣∣∣∣∣∣∣
= λ3 −7︸︷︷︸−trace(A)
λ2 + 11λ −5︸︷︷︸(−1)3 det(A)
= (λ− 5) (λ− 1)2
λ1 = 5 valeur propre simple.
36 / 55 Chapitre 7 : Equation caracteristique d’une matrice
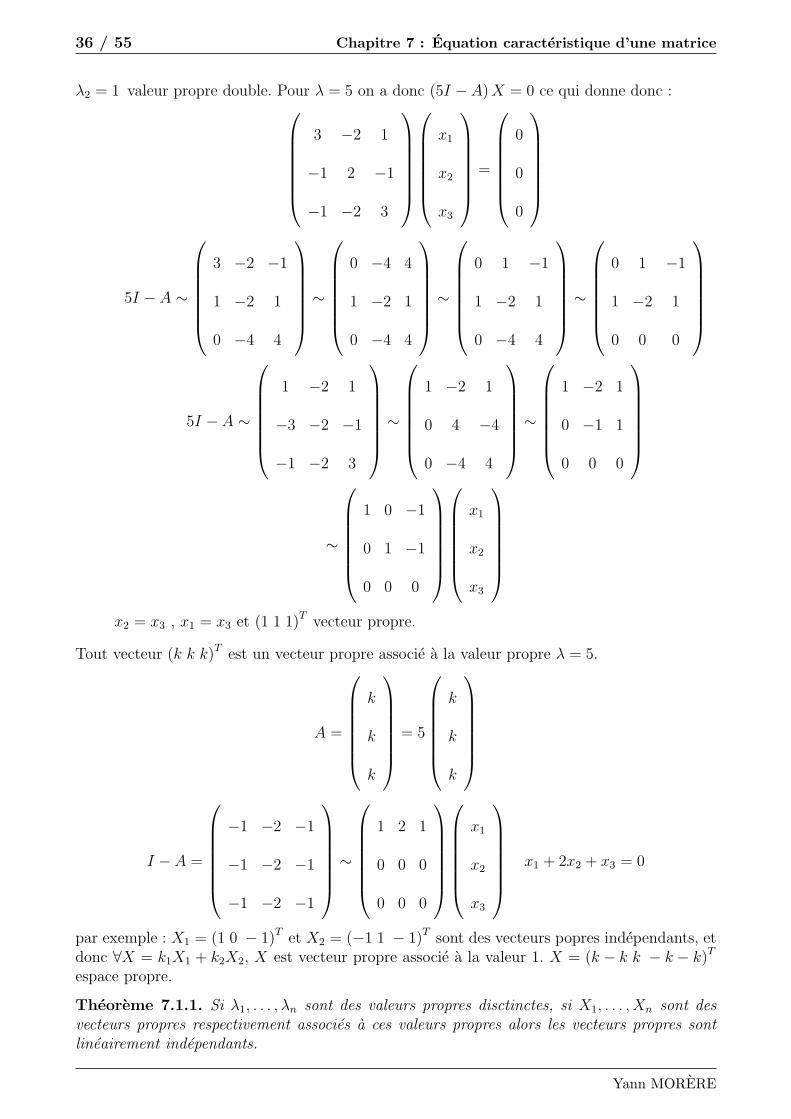
λ2 = 1 valeur propre double. Pour λ = 5 on a donc (5I − A) X = 0 ce qui donne donc :
3 −2 1
−1 2 −1
−1 −2 3
x1
x2
x3
=
0
0
0
5I − A ∼
3 −2 −1
1 −2 1
0 −4 4
∼
0 −4 4
1 −2 1
0 −4 4
∼
0 1 −1
1 −2 1
0 −4 4
∼
0 1 −1
1 −2 1
0 0 0
5I − A ∼
1 −2 1
−3 −2 −1
−1 −2 3
∼
1 −2 1
0 4 −4
0 −4 4
∼
1 −2 1
0 −1 1
0 0 0
∼
1 0 −1
0 1 −1
0 0 0
x1
x2
x3
x2 = x3 , x1 = x3 et (1 1 1)T vecteur propre.
Tout vecteur (k k k)T est un vecteur propre associe a la valeur propre λ = 5.
A =
k
k
k
= 5
k
k
k
I − A =
−1 −2 −1
−1 −2 −1
−1 −2 −1
∼
1 2 1
0 0 0
0 0 0
x1
x2
x3
x1 + 2x2 + x3 = 0
par exemple : X1 = (1 0 − 1)T et X2 = (−1 1 − 1)T sont des vecteurs popres independants, etdonc ∀X = k1X1 + k2X2, X est vecteur propre associe a la valeur 1. X = (k − k k − k − k)T
espace propre.
Theoreme 7.1.1. Si λ1, . . . , λn sont des valeurs propres disctinctes, si X1, . . . , Xn sont desvecteurs propres respectivement associes a ces valeurs propres alors les vecteurs propres sontlineairement independants.
Yann MORERE

7.1 Definitions, proprietes 37 / 55
Theoreme 7.1.2. de Cauchy-Hamilton, Toute matrice est solution de son polynome caracte-ristique : P (A) = 0 ou : −An = αn−1A
n−1 + · · ·+ α1A + α0In
Cours de Calcul Matriciel

39 / 55
Chapter 8Matrices semblables
8.1 Definitions et Proprietes
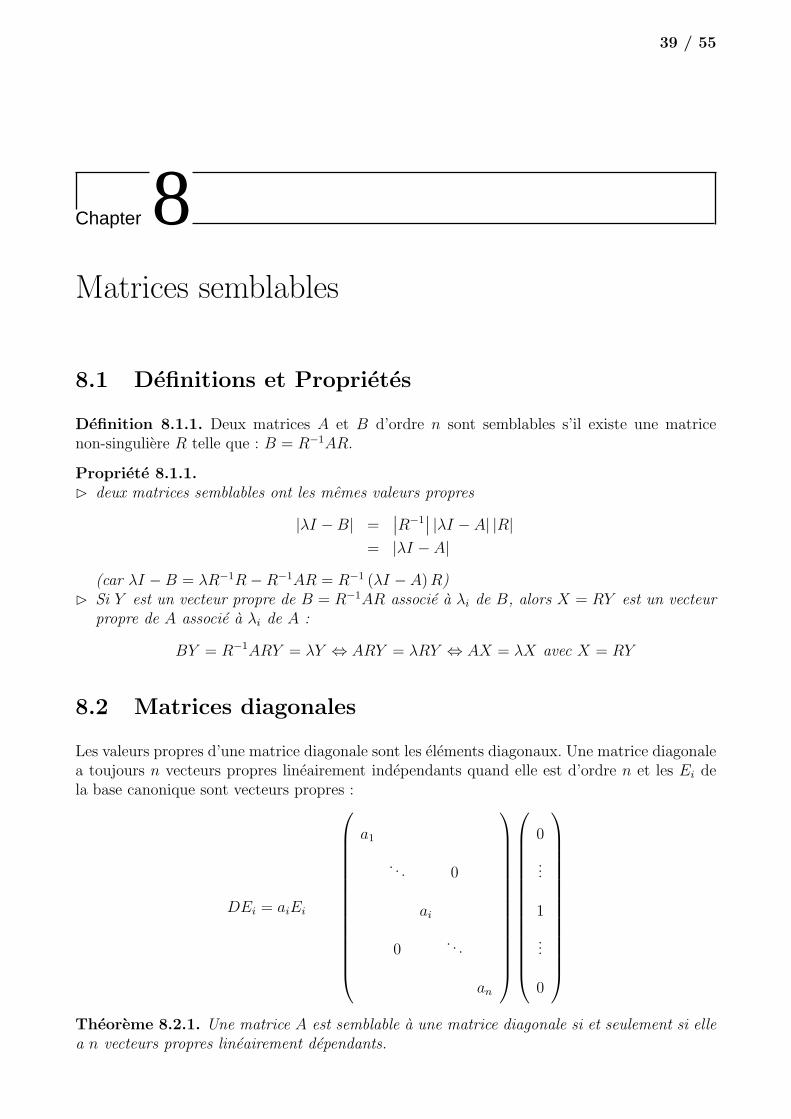
Definition 8.1.1. Deux matrices A et B d’ordre n sont semblables s’il existe une matricenon-singuliere R telle que : B = R−1AR.
Propriete 8.1.1.¤ deux matrices semblables ont les memes valeurs propres
|λI −B| =∣∣R−1
∣∣ |λI − A| |R|= |λI − A|
(car λI −B = λR−1R−R−1AR = R−1 (λI − A) R)¤ Si Y est un vecteur propre de B = R−1AR associe a λi de B, alors X = RY est un vecteur
propre de A associe a λi de A :
BY = R−1ARY = λY ⇔ ARY = λRY ⇔ AX = λX avec X = RY
8.2 Matrices diagonales
Les valeurs propres d’une matrice diagonale sont les elements diagonaux. Une matrice diagonalea toujours n vecteurs propres lineairement independants quand elle est d’ordre n et les Ei dela base canonique sont vecteurs propres :
DEi = aiEi
a1
. . . 0
ai
0. . .
an
0
...
1
...
0
Theoreme 8.2.1. Une matrice A est semblable a une matrice diagonale si et seulement si ellea n vecteurs propres lineairement dependants.

40 / 55 Chapitre 8 : Matrices semblables
Ce qui revient a
Theoreme 8.2.2. Dans un corps R, une matrice A d’ordre n est semblable a une matricediagonale si et seulement si λI−A se factorise completement sur K et si l’ordre de toute racineλi est egal a la dimension de l’espace propre associe.
Si l’on reprend l’exemple precedent : A =
2 2 1
1 3 1
1 2 2
on a : A1 = 5, X1 = (1 1 1)T , A2 = 1,
X2 = (1 0 − 1)T , X3 = (−1 1 − 1)T espace propre de dimension 2 qui est diagonalisable avec :
R =
1 1 −1
1 0 1
1 −1 −1
= (X1 X2 X3) R−1AR =
5 0 0
0 1 0
0 0 1
= D
R−1 =1
6
1 2 1
2 0 −2
−1 2 −1
Pour verifier : AR = RD
5 1 −1
5 0 1
5 −1 −1
=
5 1 −1
5 0 1
5 −1 −1
Demonstration de R−1AR = D : AR = RD, AR = A (X1 . . . Xn) = (AX1 . . . AXn),
RD = (X1 . . . Xn) D comme D diagonale
λ1 0
. . .
0 λn
, RD = (λ1X1, . . . , λnXn) d’ou
∀i ∈ {1, . . . , n} AXi = λiXi.
Theoreme 8.2.3. toute matrice A d’ordre n est semblable a une matrice triangulaire dont leselements diagonaux sont les valeurs propres de A.
8.3 Matrices symetriques reelles
Theoreme 8.3.1. Les valeurs propres d’une matrice symetrique reelle sont reelles.
Yann MORERE
8.3 Matrices symetriques reelles 41 / 55
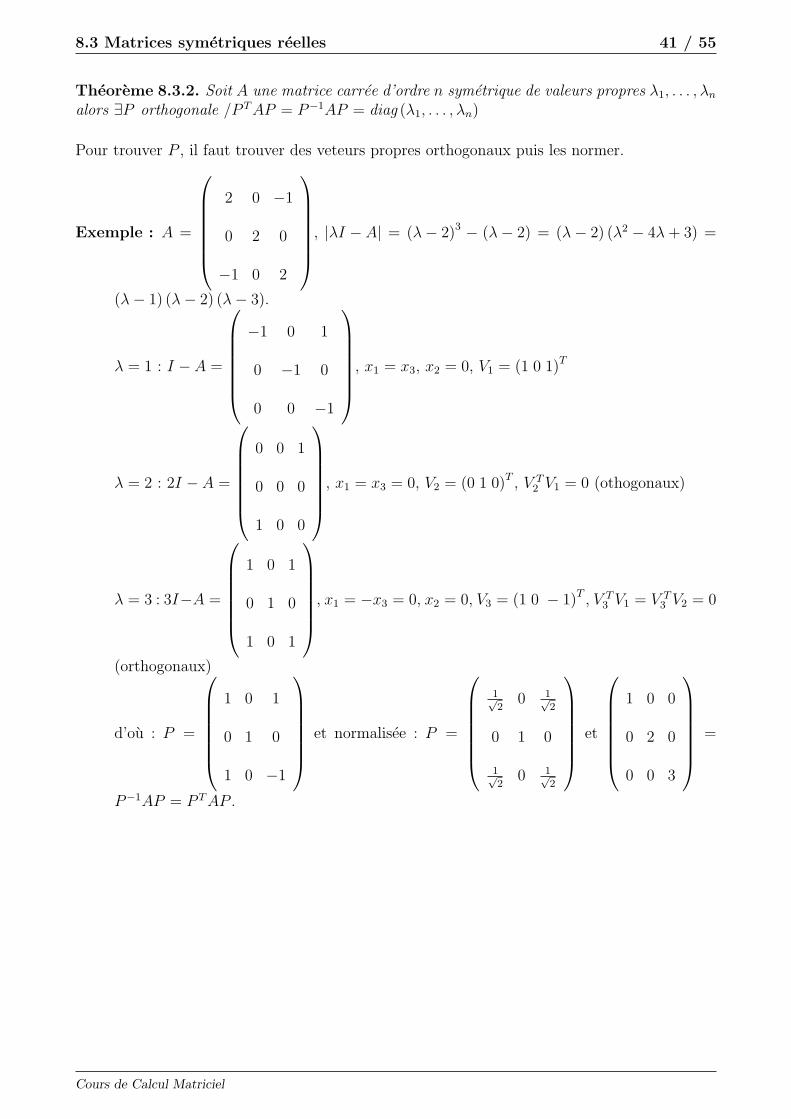
Theoreme 8.3.2. Soit A une matrice carree d’ordre n symetrique de valeurs propres λ1, . . . , λn
alors ∃P orthogonale /P T AP = P−1AP = diag (λ1, . . . , λn)
Pour trouver P , il faut trouver des veteurs propres orthogonaux puis les normer.
Exemple : A =
2 0 −1
0 2 0
−1 0 2
, |λI − A| = (λ− 2)3 − (λ− 2) = (λ− 2) (λ2 − 4λ + 3) =
(λ− 1) (λ− 2) (λ− 3).
λ = 1 : I − A =
−1 0 1
0 −1 0
0 0 −1
, x1 = x3, x2 = 0, V1 = (1 0 1)T
λ = 2 : 2I − A =
0 0 1
0 0 0
1 0 0
, x1 = x3 = 0, V2 = (0 1 0)T , V T2 V1 = 0 (othogonaux)
λ = 3 : 3I−A =
1 0 1
0 1 0
1 0 1
, x1 = −x3 = 0, x2 = 0, V3 = (1 0 − 1)T , V T3 V1 = V T
3 V2 = 0
(orthogonaux)
d’ou : P =
1 0 1
0 1 0
1 0 −1
et normalisee : P =
1√2
0 1√2
0 1 0
1√2
0 1√2
et
1 0 0
0 2 0
0 0 3
=
P−1AP = P T AP .
Cours de Calcul Matriciel


43 / 55
Chapter 9Formes quadratiques
9.1 Definition et proprietes
A = (aij) matrice carree d’ordre n.
fA : Rn × Rn → R / fA (X,Y ) = XT AY =n∑
i,j=1
aijxiyj
avec XT = (x1, . . . , xn) et Y T = (y1, . . . , yn).
Definition 9.1.1. La fonction fA est appelee forme bilineaire d’ordre n associee a A. Elle estsymetrique si A est symetrique.
Exemple : A =
a11 a12
a21 a22
, fA (x, y) = (x1 x2)
a11 a12
a21 a22
y1
y2
, fA (x, y) = a11x1y1+
a12x1y2 + a21x2y1 + a22x2y2.
9.2 Forme quadratique
Une forme quadratique d’ordre n est une fonction du type :
qA : Rn → R qA (X) = XT AX
avec A matrice symetrique d’ordre n.
Remarque 9.2.1. A =
2 −1
−1 3
, qA (X) = 2x2
1+3x22−2x1x2 avec XT = (x1 x2) on aurait pu
prendre : A′ =
2 −2
0 3
mais on choisit le seul representant des matrices qui soit symetrique.

44 / 55 Chapitre 9 : Formes quadratiques
On peut donc tres facilement passer de la forme quadratique a la matrice et inversement. Parexemple :
A =
1 1 2
1 3 0
2 0 4
qA (X) = x21 + 3x2
2 + 4x23 + 2x1x2 + 4x1x3
qA (X) = −x21 + 3x2
3 − x1x2 + 2x1x3 − 5x1x3 A =
−1 −12
1
−12
0 −52
1 −52
3
Par definition, le rang d’une forme bilineaire ou d’une forme quadratique associee a A est lerang de A.
Definition 9.2.1. une forme quadratique q ou par extension la matrice A symetrique associeeest dite :¤ definie positive si q (X) > 0 ∀X ∈ Rn (X 6= 0) (A > 0)¤ semi-definie positive si q (X) ≥ 0 ∀X ∈ Rn (A ≥ 0)¤ definie negative si q (X) < 0 ∀X ∈ Rn (X 6= 0) (A < 0)¤ semi-definie negative si q (X) ≤ 0 ∀X ∈ Rn (A ≤ 0)¤ indefinie si ∃X/q (X) > 0 et ∃X ′/q (X ′) < 0
Exemple : q (X) = x21 + 2x2
2 + 7x23 est > 0 puisque tous les termes sont > 0 donc A =
1 0 0
0 2 0
0 0 7
> 0. q (X) = x21 + 2x2
3 est ≥ 0 puisque pour x2 6= 0, q((0 x2 0)T
)= 0 donc
A =
1 0 0
0 0 0
0 0 2
≥ 0. q (X) = x2
1 + x22 − 3x1x2 est indefinie car :q
((1 0)T
)= 1 > 0,
q((1 1)T
)= −1 < 0 donc A =
1 −32
−32
1
≥ 0 est indefinie.
Remarque 9.2.2. A > 0 si et seulement −A < 0 (A ≥ 0 si et seulement si −A ≤ 0)q (X) = XT AX > 0 ∀X ∈ Rn X 6= 0−q (X) = −XT AX = XT (−A) X < 0 ∀X ∈ Rn X 6= 0
Correspond en fait a la generalisation de la notion de carre. Dans le cas scalaire : q (X) = ax2
et donc q (X) > 0 ⇒ a > 0.
Ici on cherche les memes proprietes, sauf qu’il peut y avoir des cas ou A n’est ni positive, ninegative.
Yann MORERE

9.2 Forme quadratique 45 / 55
Propriete 9.2.1. Une forme quadratique diagonale, ou une matrice diagonale d’ordre n A =diag (a1, . . . , an) est :¤ A > 0 si ∀i ai > 0,¤ A < 0 si ∀i ai < 0,¤ A ≥ 0 si ∀i ai ≥ 0,¤ A ≤ 0 si ∀i ai ≤ 0,¤ indefinie si il existe des elements non nuls de signe oppose.
L’application lineaire non singuliere X = BY transforme la forme quadratique XT AX en
la forme quadratique : Y T(BT AB
)Y et evidemment BT AB est symetrique (
(BT AB
)T=
BT AT B = BT AB), les matrices A et B sont dites congruentes si ∃P / B = P T AP .
Une forme quadratique de rang r peut se reduire a la forme diagonale :
h1x21 + · · ·+ hrx
2r (hi 6= 0 ∀i ∈ {1, . . . , r})
Pour passer a la forme diagonale on utilise encore et toujours le meme algorithme, cette fois-cisimplement comme la matrice A est symetrique les operations elementaires appliquees sur leslignes sont identiques a celles appliquees sur les colonnes et donc : D = BT AB.
Exemple : qA = x21+2x2
2−7x23−4x1x2+8x1x3 A =
1 −2 4
−2 2 0
4 0 −7
|A| = −14−32+28 6= 0
Rang A = 3 .
(A | I) =
1 −2 4
−2 2 0
4 0 −7
1 0 0
0 1 0
0 0 1
∼
1 −2 4
0 −2 8
0 8 −23
1 0 0
−2 1 0
−4 0 1
∼
1 0 0
0 −2 8
0 8 −23
1 0 0
−2 1 0
−4 0 1
donc les operations sur les lignes suffisent puisque A
etant symetrique les operations sur les colonnes sont identiques.
∼
1 0 0
0 −2 8
0 0 9
1 0 0
2 1 0
4 4 1
d’ou D = BT AB avec B =
1 2 4
0 1 4
0 0 1
et X = BY . D’ou si
x1 = y1 + 2y2 + 4y3
x2 = y2 + 4y3
x3 = y3
alors q (Y ) = y21 − 2y2
2 + 9y23
Cours de Calcul Matriciel

46 / 55 Chapitre 9 : Formes quadratiques
donc la matrice A est indefinie.On peut continuer la reduction en gardant les matrices B et BT avec :
B =
1√
2 43
0 1√2
43
0 0 13
on a D =
1 0 0
0 −1 0
0 0 1
Theoreme 9.2.1. toute forme quadratique reelle peut etre reduite par une application reellenon singuliere a la forme canonique α1y
21 + · · · + αry
2r , ou αi = 1 ou −1 et r est le rang de la
forme quadratique.
Theoreme 9.2.2. Une matrice A(n×n) est definie positive si et seulement si :¤ XT AX > 0 ∀X ∈ Rn X 6= 0,¤ Toutes les valeurs propres de A sont strictement positives,¤ A−1 existe et elle est definie positive,¤ tous les mineurs principaux successifs de la matrice A sont > 0,¤ decomposition de Choleski :
A possede une factorisation triangulaire A = UT U , ou U est une matrice triangulaire suu-perieure a diagonale positive.
Remarque 9.2.3. Pour Cholesky :⇒ si A est definie positive, elle est congruente a une matrice diagonale D qui a tous ses termespositifs. Par transformation 1√
αisur chaque element, elle est congruente a l’identite. Donc
∃P triangulaire superieure /X − PY et : I = P T AP avec P triangulaire superieure, d’ou :A = P−T IP−1 et en prenant U = P−1 on a :
A = UT U et T triengulaire infrieure.
⇐ si on a A = UT U qA (X) = XT UT UX = (UX)T UX = yT y = y21 + . . . + y2
r > 0 et doncqA (X) = 0 ⇒ UT X = 0⇒ X = 0 (car U est inversible).
Mineurs principaux successifs : p1 = a11, p2 =
∣∣∣∣∣∣∣∣
a11 a12
a21 a22
∣∣∣∣∣∣∣∣, p3 =
∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣∣∣∣∣∣∣
, . . . pn =
|A|.
Exemple : qA = x21 + 3x2
2 + 11x23 − 2x1x2 − 8x2x3 d’ou A =
1 −1 0
−1 3 −4
0 −4 11
on a p1 = 1,
p2 =
∣∣∣∣∣∣∣∣
1 −1
−1 3
∣∣∣∣∣∣∣∣= 2, p3 = |A| = 33− 16− 11 = 6 donc A est definie positive.
Yann MORERE
9.2 Forme quadratique 47 / 55
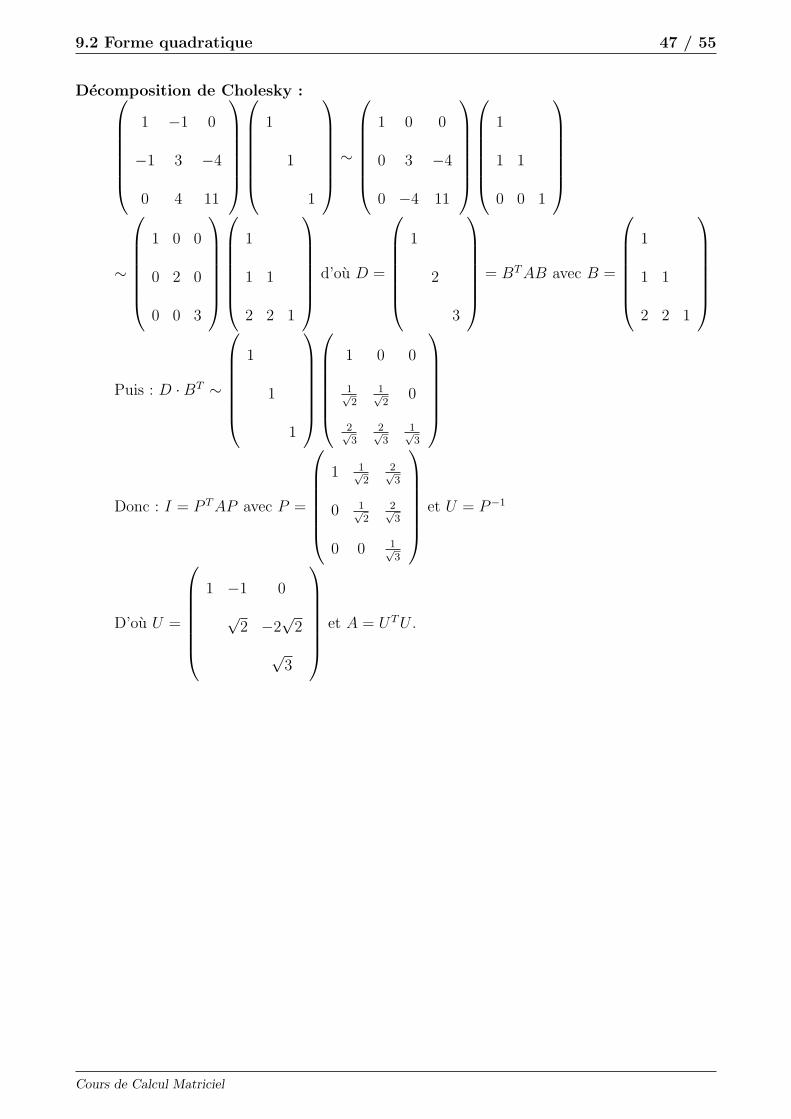
Decomposition de Cholesky :
1 −1 0
−1 3 −4
0 4 11
1
1
1
∼
1 0 0
0 3 −4
0 −4 11
1
1 1
0 0 1
∼
1 0 0
0 2 0
0 0 3
1
1 1
2 2 1
d’ou D =
1
2
3
= BT AB avec B =
1
1 1
2 2 1
Puis : D ·BT ∼
1
1
1
1 0 0
1√2
1√2
0
2√3
2√3
1√3
Donc : I = P T AP avec P =
1 1√2
2√3
0 1√2
2√3
0 0 1√3
et U = P−1
D’ou U =
1 −1 0
√2 −2
√2
√3
et A = UT U .
Cours de Calcul Matriciel


49 / 55
Chapter 10Systemes differenciels
10.1 Proprietes et Definitions
dX(t)dt
= AX (t) avec X (t) = (x1 (t) . . . xn (t))T avec X (t) = (x1 (t) , . . . , xn (t))T
A = (aij)(n×n) et t ∈ R.
dxi (t)
dt=
n∑j=1
aijxj (t)
n equations differentielles du premier ordre.
10.2 Cas scalaire
x (t) = ax (t) la solution d’une telle equation differentielle est donnee par x (t) = eatx (0) avecx (0) les conditions initiales (CI).
Le developpement limite de eat s’ecrit eat = 1 + at + a2
2t2 + · · · = ∑∞
i=0ai
i!ti.
10.3 Cas matriciel
Par ananlogie : soit P (t) = I + At + A2
2!t2 + · · · =
∑∞i=0
ai
i!ti. Soit X (t) = P (t) X (0) (dA(t)
dt=(
daij(t)
dt
)).
dP (t)dt
= A+A2t+. . . =∑∞
i=1 Ai ti−1
(i−1)!= A
∑∞i=0 Ai ti
i!= A·P d’ou : dX(t)
dt= A·P (t) A (0) = AX (t)
donc X (t) = P (t) X (0) est solution de l’equation differentielle matricielle.
On appelle donc exponentielle de matrice :
eAt = I + At + A2 t2
2!+ · · · =
∞∑i=0
Ai
i!ti.

50 / 55 Chapitre 10 : Systemes differenciels
10.4 Evaluation de eAt
10.4.1 Calcul numerique
Par calcul numerique avec arret quand les termes deviennent negligeables ou si A est nilpotente(∃k ∈ N/Ak = 0).
Exemple : dX(t)dt
=
0 1
0 0
X (t) on fait correspondre a x1 (t) = x2 (t), x2 (t) = 0⇒ x2 (t) =
x2 (0) et x1 (t) = x2 (0) t + x2 (0) ⇒ X =
1 t
0 1
X0.
A2 = 0 d’ou : eAt =
1 0
0 1
+
1 0
0 0
t
1!=
1 t
0 1
et la solution est : X (t) =
1 t
0 1
X0
10.4.2 A diagonale
A = diag (λi) i ∈ {1, . . . , n} eAt = diag(eλit
)car eAt =
∑∞j=0 (diag (λi))
j tj
j!= diag
(∑∞j=0 λj
itj
j!
)=
diag(eλit
).
10.4.3 Utilisation de la formule de Sylverster
Soit PA (λ) = a0 + a1λ + · · ·+ λn le polynome caracteristique de A d’apres Cauchy-Hamilton :
PA (A) = 0 donc An = −∑n−1i=0 aiA
i avec eAt =∑∞
j=0tj
j!Aj, toute puissance de A, Ak avec k ≥ n
peut donc s’ecrire en fonction de n− 1 premieres matrices d’ou :
eAt =∞∑
j=0
αjAj (Formule de Sylvester)
Soit la fonction : g (A) = eλt −∑n−1i=0 αi (t) λi on a : g (A) = eAt −∑n−1
i=0 αi (t) Ai
Or si λj est une valeur propre de A d’ordre de multiplicite nj, alors g (λj) est une valeur proprede g (A) d’ordre de multiplicite nj (d’apres : si λ valeur propre d’ordre n, f (λ) valeur propred’ordre n de f (A) quelque soit f une fonction scalaire).
Or g (A) = 0 donc la matrice g (A) a n valeurs propres nulles d’ou ∀j ∈ {1, . . . , n} g (λj) = 0et donc eλjt =
∑n−1i=0 αj (t) λi
j.
λi valeur propre d’ordre nj → g (λi) valeur propre de g (A) d’ordre nj or toutes les valeurspropres de g (A) sont nulles donc λg(A) = 0 = g (λi).
Yann MORERE

10.4 Evaluation de eAt 51 / 55
⇒ pour trouver eAt il suffit de travailler sur les eλjt. Comme l’ordre de multiplicite est nj parλj : (
dk
dλkg (λ)
)
λ=λj
= 0
oudk
dλk
(eλt −
n−1∑i=0
αi (t) λi
)
λ=λj=0
∀k ∈ {0, . . . , nj − 1}
Exemple : A =
0 1
0 −10
valeur propre : PA (λ) = λ2 + 10λ soit λ1 = 0 et λ2 = −10 donc
eAt a comme valeur propre 1 et e−10t.e0·t = α0 (t) + 0 · α1 (t) ⇒ α0 (t) = 1e−10·t = α0 (t)− 10 · α1 (t) ⇒ α1 (t) = 1
10(1− e−10t) d’ou
eAt = α0 (t) I + α1 (t) A =
1 0
0 1
+
0 110
(1− e−10t)
0 −1 + e−10t
=
1 110
(1− e−10t)
0 e−10t
A =
0 1
0 0
valeur propre 0, 0⇒ une valeur propre double de eAt. e0·t = α0 (t)+0·α1 (t)
→ α0 (t) = 1. ddλ
(eλt − α0 (t− λα1 (t))
)λ=0
=(teλt − α1 (t)
)λ=0
= 0 d’ou : α1 (t) = t et
donc eAt = I +
0 t
0 0
−
1 t
0 1
.
Cours de Calcul Matriciel

53 / 55
Chapter 11Quelques extras
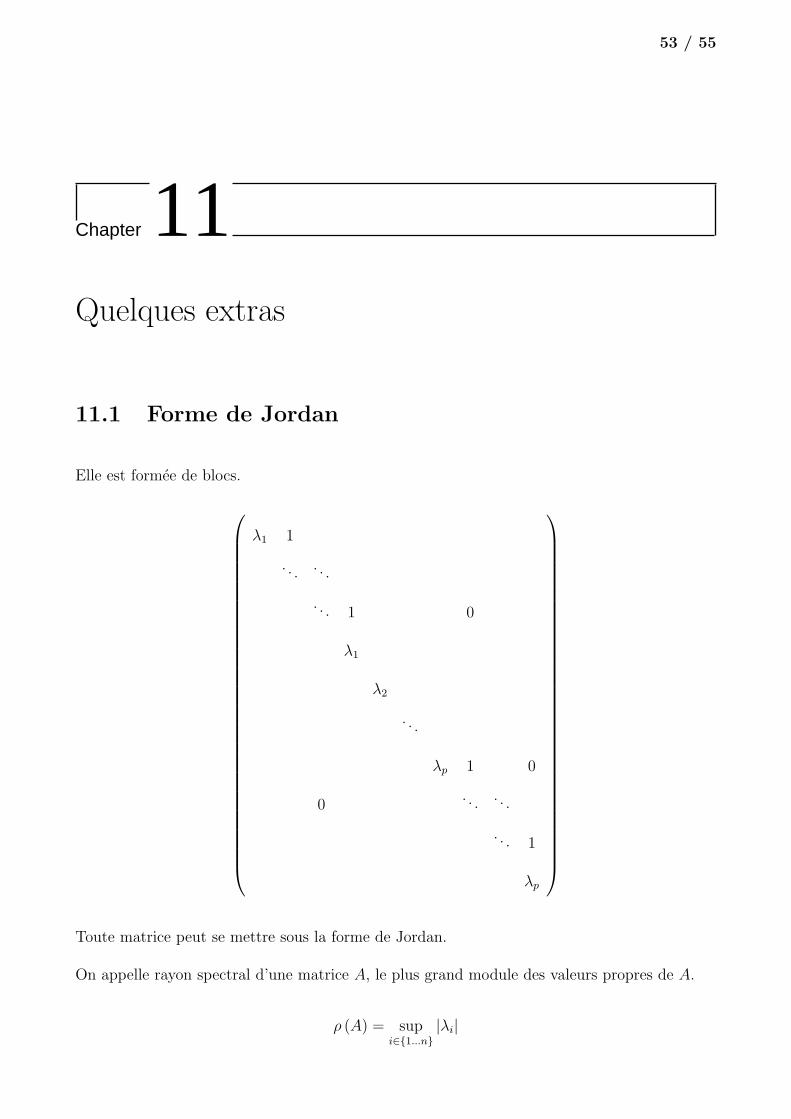
11.1 Forme de Jordan
Elle est formee de blocs.
λ1 1
. . . . . .
. . . 1 0
λ1
λ2
. . .
λp 1 0
0. . . . . .
. . . 1
λp
Toute matrice peut se mettre sous la forme de Jordan.
On appelle rayon spectral d’une matrice A, le plus grand module des valeurs propres de A.
ρ (A) = supi∈{1...n}
|λi|

54 / 55 Chapitre 11 : Quelques extras
11.2 Matrice compagne
C =
0 −α0
1. . . −α1
. . . . . ....
. . . 0...
0 1 −αn−1
|λI − C| =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
λ α0
−1 λ α1
−1. . .
...
. . . λ...
0 −1 λ + αn−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= λ
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
λ 0 α1
−1. . . α2
. . . λ...
0 −1 λ + αn−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
+ α0
= λ2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
λ 0 α2
−1. . .
...
. . . λ...
0 −1 λ + αn−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
+ λα1 + α0
d’ou Pc (λ) = λn + αn−1λn−1 + · · ·+ α1λ + α0 le polynome caracteristique est immediat.
Exemple :
A =
0 0 0
1 0 0
0 1 −1
calculer eAt et le rayon spectral.
PA (λ) = λ3 + λ2 = λ2 (λ + 1) ⇒ λ1 = 0 valeur propre double, λ = −1. eλt = α0 (t) + λα1 (t) +λ2α2 (t).
ddt→teλt = α1 (t) + 2λα2 (t)
λ1 = 0 : α0 (t) = 1 et α1 (t) = t
λ2 = −1 : e−t = 1− t + α2 et α2 (t) = t− 1 + e−t
Yann MORERE

11.2 Matrice compagne 55 / 55
eAt = I +
0 0 0
t 0 0
0 t −t
+
0 0 0
0 0 0
t− 1 + e−t −t + 1− e−t t− 1 + e−t
=
1 0 0
t 1 0
t− 1 + e−t 1− e−t −et
et 1 est une valeur propre double et e−t valeur propre simple de eAt.
Cours de Calcul Matriciel











![Fiabilité et renouvellement des équipementsexcerpts.numilog.com/books/9782040078454.pdf · applications élémentaires aux investissements ] ... Exercices de calcul matriciel et](https://static.fdocuments.fr/doc/165x107/5b9d63e109d3f29a298c7c52/fiabilite-et-renouvellement-des-e-applications-elementaires-aux-investissements.jpg)






