Correction à action continue Introduction : Système EntréeSortie Perturbation -Temps de réponse...
13
Correction à action continue Introductio n : Système Entrée Sortie Perturbation -Temps de réponse lent -Oscillante, mal amortie -Instable But de la correction : Générer des commandes permettant : - D’améliorer le comportement intrinsèque du processus en garantissant une bonne stabilité, ensuite une bonne rapidité de réaction en augmentant sa précision. - Obliger le système à suivre au plus près la consigne quand celle-ci varie et à rejeter les perturbations Commander un système, c’est faire évoluer ses sorties vers des états désirés en garantissant une stabilité, une bonne précision et une insensibilité aux
-
Upload
beatrice-guignard -
Category
Documents
-
view
105 -
download
2
Transcript of Correction à action continue Introduction : Système EntréeSortie Perturbation -Temps de réponse...

Correction à action continue
Introduction :
SystèmeEntrée Sortie
Perturbation -Temps de réponse lent-Oscillante, mal amortie-Instable
But de la correction : Générer des commandes permettant :- D’améliorer le comportement intrinsèque du processus en garantissant une bonne stabilité, ensuite une bonne rapidité de réaction en augmentant sa précision.- Obliger le système à suivre au plus près la consigne quand celle-ci varie et à rejeter les perturbations
Commander un système, c’est faire évoluer ses sorties vers des états désirés en garantissant une stabilité, une bonne précision et une insensibilité aux perturbations.
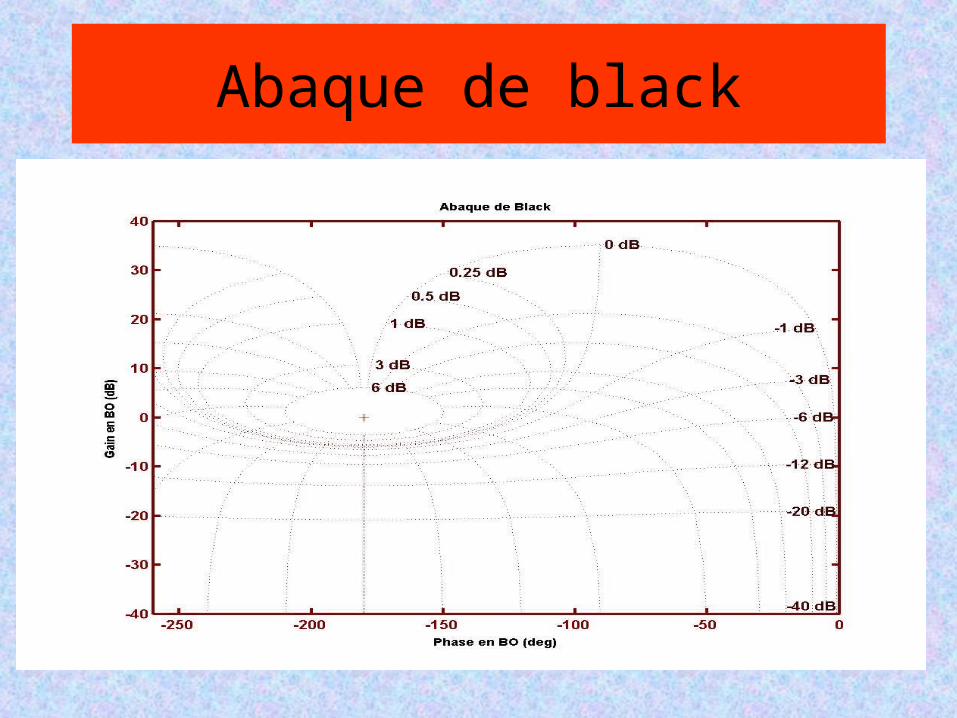
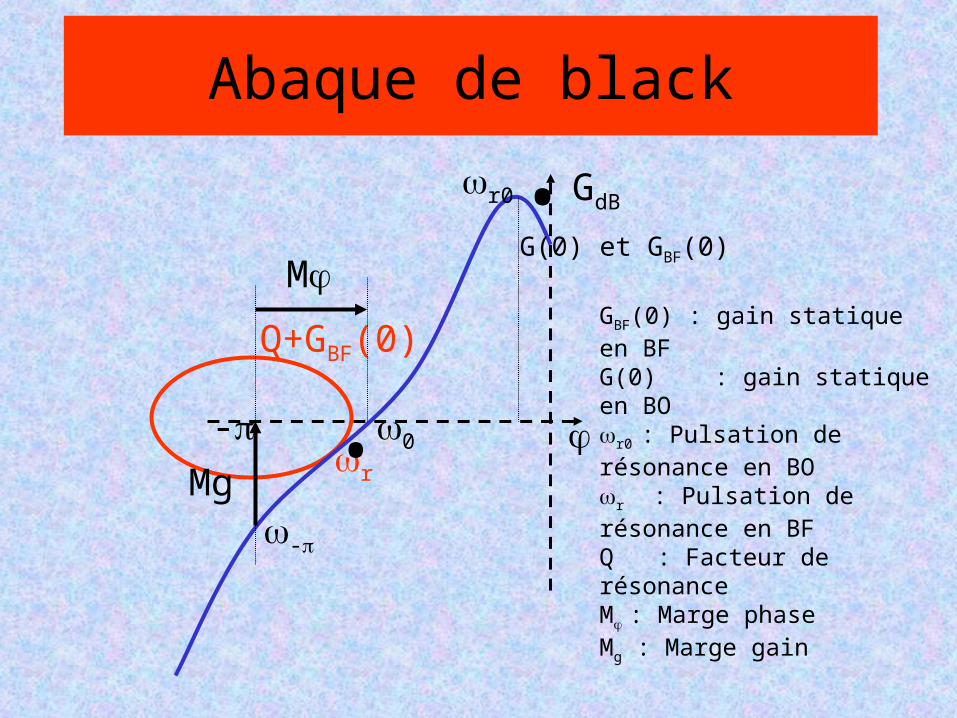
Abaque de black
Abaque de black
GdB
G(0) et GBF(0)
r0
r
Q+GBF(0)
-
0-Mg
M
.
.GBF(0) : gain statique en BFG(0) : gain statique en BOr0 : Pulsation de résonance en BOr : Pulsation de résonance en BFQ : Facteur de résonanceM: Marge phaseMg : Marge gain
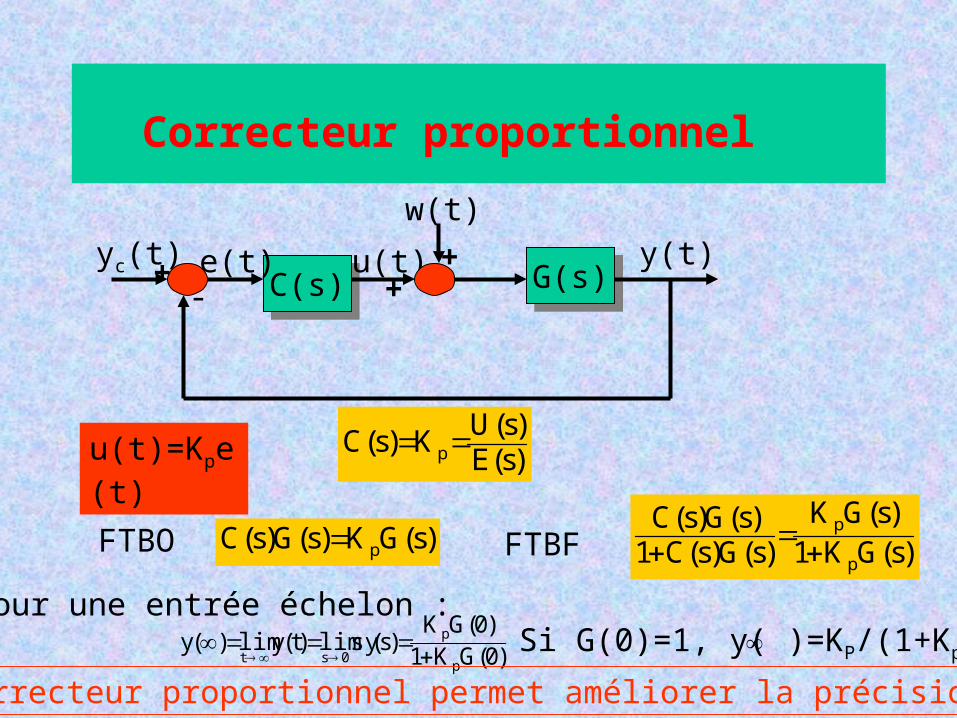
Correcteur proportionnel
u(t)=Kpe(t) )s(E)s(U
K)s(C p
C(s)C(s) G(s)G(s)yc(t)
w(t)
u(t) y(t)-
+ ++e(t)
FTBO )s(GK)s(G)s(C p )s(GK1)s(GK
)s(G)s(C1)s(G)s(C
p
p
FTBF
Pour une entrée échelon :
)0(GK1)0(GK
)s(sylim)t(ylim)(yp
p
0st
Si G(0)=1, y( )=KP/(1+Kp)
Le correcteur proportionnel permet améliorer la précision
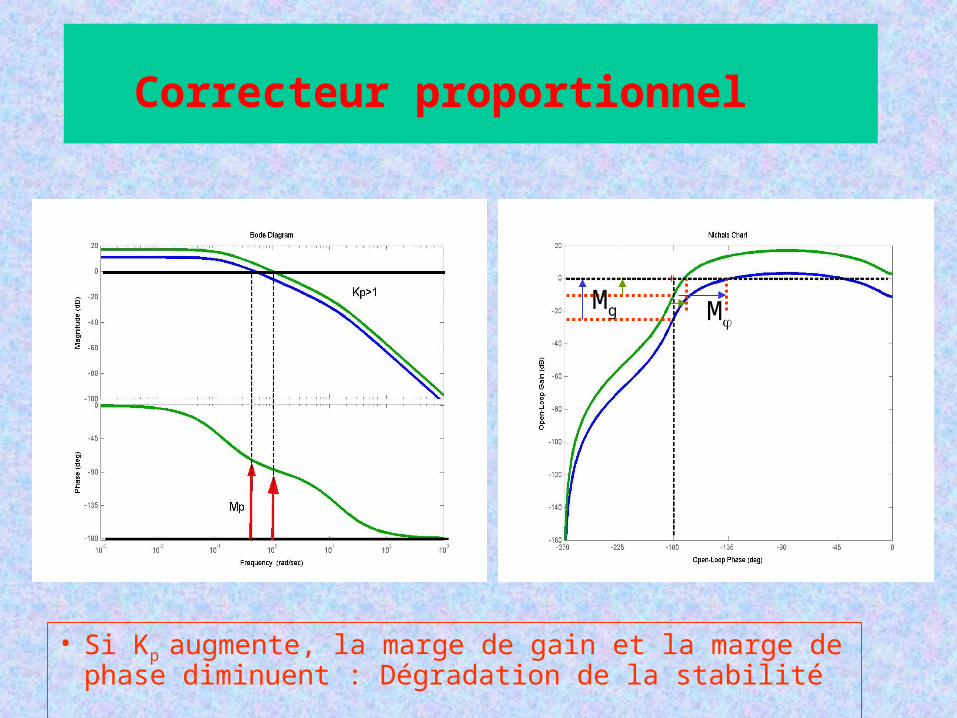
• Si Kp augmente, la marge de gain et la marge de
phase diminuent : Dégradation de la stabilité
Correcteur proportionnel
Mg M

Correcteur Proportionnel Dérivé (PD)
)sT1(K)s(C dp )dt
)t(deT)t(e(K)t(u dp
22p wT1(K)jw(C
d )wT(artg d
Si :Amélioration de la stabilitérdT
1 Si :Sans intérêtrdT
1
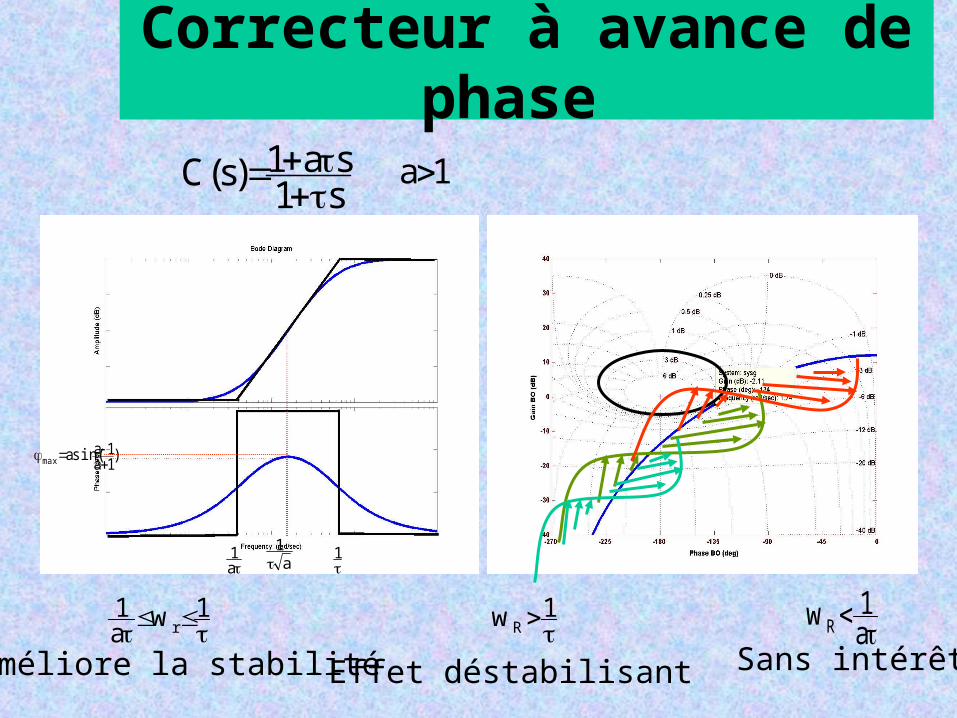
Correcteur à avance de phase
s1sa1)s(C
1a
)1a1asin(amax
a1
1
a1
1w
a1
r
Améliore la stabilité1wR
Effet déstabilisant
a1wR
Sans intérêt
Si R
i
w1 Améliore la précision
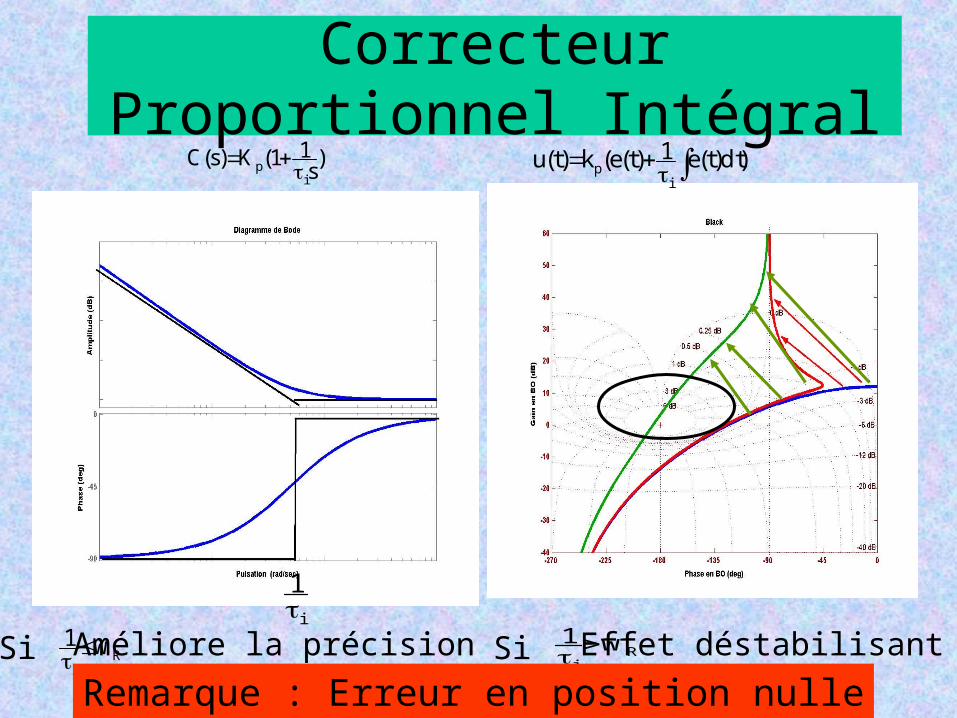
Correcteur Proportionnel Intégral)
s11(K)s(Ci
p )dt)t(e1)t(e(k)t(ui
p
Si Ri
w1 Effet déstabilisanti
1
Remarque : Erreur en position nulle

r
Correcteur à Retard de phase
sb1s1)s(C
b>1
b1
1
b1
Rw1Accroître la précision
Rwb1
Sans intérêt
Rwb
1
Effet déstabilisant
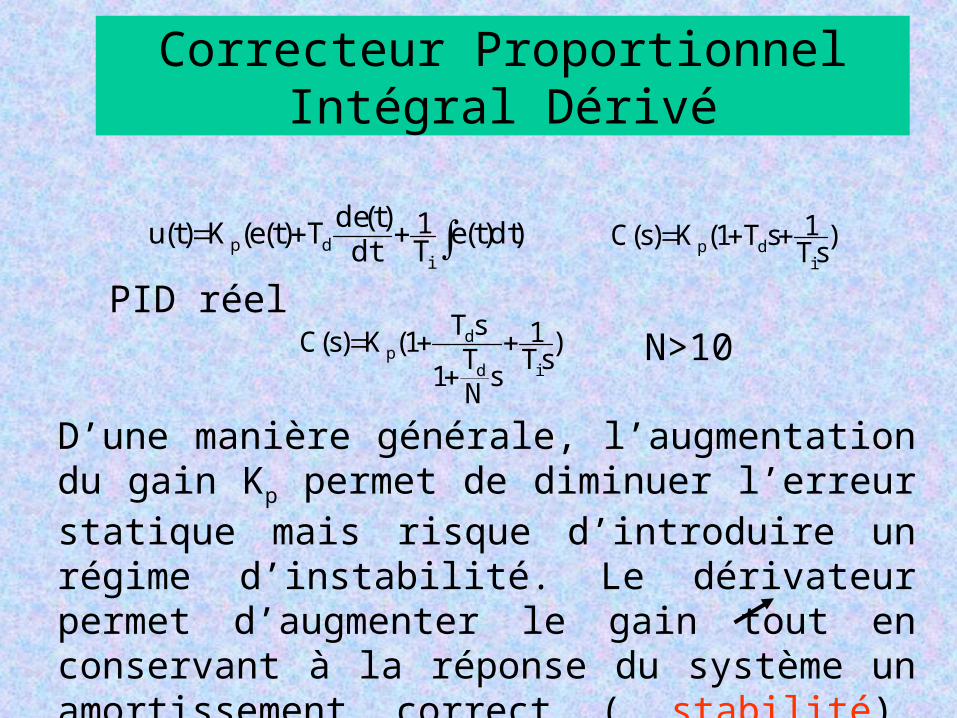
Correcteur Proportionnel Intégral Dérivé
)dt)t(eT1
dt)t(de
T)t(e(K)t(ui
dp )sT
1sT1(K)s(Ci
dp
PID réel)
sT1
sNT
1
sT1(K)s(C
id
dp
N>10
D’une manière générale, l’augmentation du gain Kp permet de diminuer l’erreur statique mais risque d’introduire un régime d’instabilité. Le dérivateur permet d’augmenter le gain tout en conservant à la réponse du système un amortissement correct ( stabilité). L’intégrateur permet d éliminer l’erreur statique
Conclusion
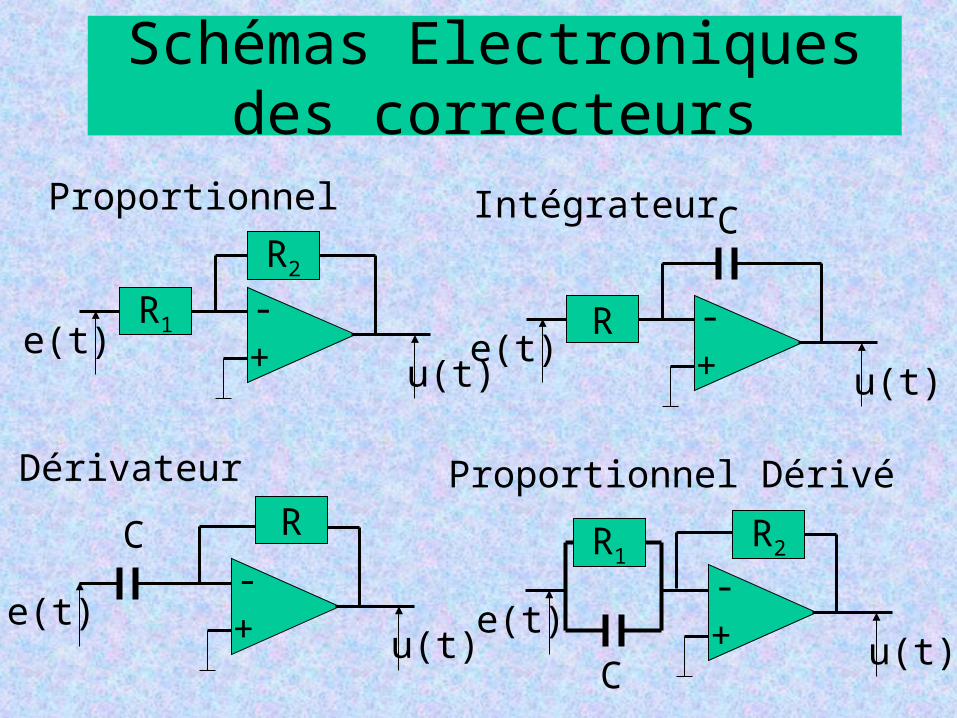
Schémas Electroniques des correcteurs
Proportionnel
R1
R2
e(t)u(t)+
-
Intégrateur
Re(t)
u(t)+-
C
Dérivateur
R
e(t)u(t)+
-C
Proportionnel Dérivé
R1
e(t)u(t)+
-
C
R2

Schémas Electroniques des correcteurs
Proportionnel Intégral
e(t)u(t)+
-
R2
CR1
Proportionnel Intégral Dérivé
e(t) u(t)
R1
+
-
R1
R2
+
-
R1
+
-C
C
+
+
+