CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf

of 160
Transcript of CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
1/160
R p u b l i q u e A l g r i e n n e D m o c r a t i q u e e t P o p u l a i r eM i n i s t r e de le n s e i g n e m e n t s u p r i e u r et de la r e c h e r c h e s c i e n t i f i q u e
______________________________________________________________________________________________________
T H E S E
Prsente
lU n i v e r s i t d e B a t n a
En vue de lobtention du diplme de
D O C T O R A T E N S C I E N C E SE N E L E C T R O T E C H N I Q U E
Option: Electrotechnique
Prsente par
DENDOUGA AbdelhakimCharge de Cours lUniversit de Biskra
Magister en lectrotechnique de luniversit de Batna
Ingnieur dtat en lectrotechnique deluniversit de Batna
____________________________________________________
CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DELA MACHINE A DOUBLE ALIMENTATION (DFIM)
____________________________________________________
Thse soutenue le : 10/02/2010devant le jury :
Farid NACERI Prsident Professeur Univ. Batna
Rachid ABDESSEMED Rapporteur Professeur Univ. Batna
Mohamed Lokmane BENDAAS Co-Rapporteur Matre de Confrences Univ. Batna
Amar GOLEA Examinateur Professeur Univ. Biskra
Abdelhamid BENAKCHA Examinateur Matre de Confrences Univ. Biskra
Djamel AOUZELLAG Examinateur Matre de Confrences Univ. Bejaia
1
Thse prpare au sein du laboratoire dElectrotechnique de Batna (LEB)
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
2/160
REMERCIEMENTS
Tout dabord, je remercie dieu de tout puissant de mavoir donn le courage et la patience
durant toutes ces annes dtudes.
Je tiens exprimer ma profonde gratitude et ma reconnaissance envers mes promoteurs
Mr. R. Abdessamed, professeur luniversit de Batna et Mr. M.L. Bendaas,matre de
confrences luniversit de Batna, pour la confiance quils mont prodigu, pour leurs
encouragements continus, pour le suivi et la direction de mon travail, ainsi que pour leurs
conseils judicieux.
Par ailleurs, je remercie vivement Mr. F. NASRI,professeur luniversit de Batna, qui
ma fait lhonneur de prsider le jury de ma thse.
Je tiens galement prsenter mes sincres remerciements Mr. A. Gola, professeur
luniversit de BiskraetMr. A. Benakcha, Matrede confrences luniversit de Biskra
et Mr. D. Aouzellag, Matre de confrences luniversit de Bejaia, pour leur
participation l'valuation scientifique de ce travail.
Je noublie videmment pas mes collgues du LEB et mes enseignants du dpartement
dlectrotechnique de Batna.
Enfin, si j'ai oubli quelqu'un, je le prie de me pardonner.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
3/160
A ma mreA la mmoire de mon preA ma femme
A ma fille khlas et mon fils ssamA mes frres et mes surs
A tous ceux qui me sont chersJe ddie ce modeste travail.
Dendouga Abdelhakim
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
4/160
Avant-propos
Avant-propos
Les travaux de recherche consigns par la prsente thse ont t concrtiss par plusieurs
publications et communications nationales et internationales dont:
Publications:
A. Dendouga, R. Abdessemed and M.L. Bendaas, "Active and Reactive Powers Control of
a Doubly-Fed Induction Generator Fed by Matrix Converter", EPE Journal, Vol.19, No.1,
2009.
A. Dendouga, R. Abdessemed and M.L. Bendaas, "Decoupled Control of a Doubly-Fed
Induction Machine Fed by SVM Matrix Converter", KIEE Journal, Vol.3, No.4, 2008.
A. Dendouga, R. Abdessemed and M.L. Bendaas, "Simple Concept and Robust Control
of a Doubly-Fed Induction Generator by Sliding Mode Control", International Review of
Automatic ControlIREACO Journal, Vol.1, No.1, 2008.
Communications:
A. Dendouga, R. Abdessemed and A. Chaiba, " Sliding Mode and Direct Torque Control
of Variable Speed Wind Turbine ", ICRE'07, Bejaia, 25-27 Nov., 2007.
A. Dendouga, R. Abdessemed, M.L. Bendaas and A. Chaiba, "Decoupled Active and
Reactive Power Control of a Doubly-Fed Induction Generator (DFIG)", Proc. 15 th
Conference on Control and Automation, July 27-29, Athens, Greece, 2007.
A. Dendouga, R. Abdessemed, M.L. Bendaas and A. Chaiba, "Rglage par Mode Glissant
des Puissances Active et Ractive de la Machine Asynchrone Double Alimentation
(MADA)", Proc. 4thConf. CEE'04, Batna, 2004.
A. Dendouga, R. Abdessemed, M.L. Bendaas and A. Chaiba, "Power Flow Control of a
Doubly-Fed Induction Generator (DFIG)", Proc. 3th Inter. Conf. On Signals, Systems,
Devices SSD'05, March 21-24, Sousse, Tunisia, 2005.
A. Dendouga, R. Abdessemed, M.L. Bendaas and A. Chaiba, "Sliding mode control of
active and reactive power generated by a doubly fed induction generator (DFIG)", Proc. 4 th
Conf. Sur le gnie lectrique, EMP-Alger, April 12-13, Algeria, 2005.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
5/160
Rsum Ar_Fr_En
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
6/160
_Rsum_ Abstract
R.1
)DFIM(
:
)DFIM(
.
)DFIM(
.
)DFIM(
Venturini
.
.
Matlab.
PI
)DFIM(
.
:
PI
Venturini
.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
7/160
_Rsum_ Abstract
R.2
Contrle des Puissances Active et Ractive de la Machine
Double Alimentation (DFIM)
Rsum: Cette thse traite la modlisation, le contrle et la simulation d'un systme de conversion
lectromcanique d'nergie lectrique base d'une machine double alimentation (DFIM) connecte
directement au rseau et pilote par son rotor via un convertisseur matriciel. L'ide, consiste implmenter un
systme de contrle dcoupl des puissances active et ractive gnres par le stator de la DFIM afin d'assurer
de hautes performances et une meilleure excution de la DFIM d'une part, et de rendre le systme insensible aux
perturbations extrieures et aux variations paramtriques d'autre part. En premier lieu, nous avons commenc
par une tude de l'tat de l'art, du rgime permanent et de modlisation de la DFIM; en suite nous avons
effectu galement une tude de modlisation et de simulation sur le convertisseur matriciel contrl par la
technique de modulation de Venturini, vu que cette dernire prsente un taux d'harmoniques rduit et offre la
possibilit d'obtenir un fonctionnement avec un facteur de puissance unitaire l'entre de celui-ci. En deuxime
lieu nous avons adopt un contrle vectoriel bas sur l'orientation du vecteur tension statorique suivant le
rfrentiel synchrone li au champ tournant pour contrler les puissances active et ractive. A fin de valider et
de tester le systme de conversion complet (DFIM, convertisseur matriciel, Algorithmes de contrle), une tude
de simulation sous l'environnement Matlab a t effectue. D'aprs les rsultats obtenus, nous pouvons
confirmer que le contrle vectoriel indirect avec des boucles de puissances active et ractive base de
rgulateurs PI constitue une solution viable et attractive pour les systmes de gnration vitesse variablenotamment dans les systmes oliens, de mme qu'il prsente l'avantage de contrler les courants rotorique et ce
qui permet d'assurer la protection de la DFIM par limitation des courants d'une part, et d'assurer un
fonctionnement optimal du systme de conversion en minimisant les ventuels soucis lis aux variations des
paramtres.
Mots-Cls:
machine double alimentation;
contrle vectoriel;
rgulateurs PI;
convertisseur Matriciel;
technique de Modulation de Venturini;
systme de Conversion vitesse variable.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
8/160
_Rsum_ Abstract
R.3
Control of active and reactive powers of a doubly fed
induction machine (DFIM)
Abstract: This thesis treats the modeling, the control and the simulation of an electrical power
electromechanical conversion system based on the doubly fed induction connected directly to the grid by the
stator and fed by a matrix converter machine on the rotor side. The idea, consists to implementation of a
decoupled control system of active and reactive powers generated by the stator side of the DFIM, in order to
ensure of the high performance and a better execution of the DFIM, and to make the system insensible with the
external disturbances and the parametric variations. In the first place, we started with a study of the state of the
art, of steady-state and of modeling of the DFIM, in continuation we also carried out a study of modeling and
simulation on the matrix converter controlled by the Venturini modulation technique, because this later present
a reduced harmonic rate and the possibility of operation of the converter at the input unit power-factor. In
second place, we adopted a vector control based on the stator voltage vector orientation according to the
synchronous reference frame related to the rotate field to control the active and reactive. To validate and test the
complete conversion system (DFIM, matrix converter, Algorithms of control), a study of simulation under the
Matlab environment was carried out. According to the results obtained , we can confirm that the indirect vector
control with a power loop of the active and reactive powers is a solution viable and attractive for the variable
speed generation systems in particular in the wind systems, because this last makes it possible to obtain a
preferment and robust control system for a variable speed operation, just as it has the advantage of controllingthe rotor currents what makes it possible to ensure the protection of the DFIM by limitation of the currents, and
of ensuring an optimal operation of the conversion system by minimizing the possibility related to the variations
of the parameters.
Key-Words:
Doubly fed induction machine;
vector control;
PI regulators; Matrix converter;
Venturini modulation technique;
Variable speed conversion system.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
9/160
Table des matires
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
10/160
Table des matires
T.1
Table des matires
NOTATIONS ET SYMBOLES.
INTORDUCTION GENERALE..
1
3
CHAPITRE I
Etat de l'Art de la Machine Double Alimentation
1.1 Introduction......
1.2 Description de la machine double alimentation
1.3 Classification des machines double alimentation..
1.3.1 Machine double alimentation rotor bobin...
1.3.2 Machine double alimentation en cascade asynchrone.
1.3.3 Machine double alimentation sans balais.....
1.4 Comparaison entre les diffrentes variantes de la machine double alimentation..
1.5 Principe de fonctionnement de la DFIM..
1.6 Modes oprationnels de la DFIM.
1.7 Avantages et inconvnients de la DFIM......
1.7.1 Avantages de la DFIM
1.7.2 Inconvnients de la DFIM..
1.8 Domaines d'application de la DFIM.
1.8.1 Dans les systmes d'entranement vitesse variable..
1.8.2 Dans les systmes de gnration olienne vitesse variable.
1.8.2.1Eolienne isole (autonome).......
1.8.2.2Eolienne connecte au rseau...
1.9 Les diffrentes configurations de l'association DFIM/convertisseur de puissances
1.9.1 DFIM avec un convertisseur AC/AC associ au rotor...
1.9.2 DFIM avec deux convertisseurs AC/AC
1.10 Convertisseurs de puissance associs la DFIM...
1.10.1 Redresseur non/et contrlable associ un onduleur MLI thyristors....
1.10.2 Cycloconvertisseur...
1.10.3 Redresseur MLI de courant associ un onduleur MLI de tension.
1.10.4 Convertisseur Matriciel
8
9
9
10
11
12
12
14
16
18
19
19
19
19
21
21
22
24
24
25
25
27
28
29
30
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
11/160
Table des matires
T.2
1.11Caractristique des interrupteurs semi-conducteur utilises dans le domaine
vitesse variable........
1.12 Etat del'art sur les stratgies de commande de la DFIM...
1.12.1 Fonctionnent moteur.
1.12.2 Fonctionnent gnrateur...
1.12.3 Conclusion sur l'tat de l'art..
1.13 Positionnement du contexte de travail...
1.14 Conclusion..
32
33
34
37
41
42
43
CHAPITRE II
Etude et Analyse de la DFIM en Rgime Permanent
2.1 Introduction...
2.2 Equations de la DFIM en rgime permanent
2.3 Circuit quivalent de la DFIM..
2.4 Bilan de puissances et rendement de la DFIM..
2.5 Diagramme vectoriel de la DFIM.
2.6 Caractristiques de la DFIM en rgime permanent...
1.6.1 Caractristiques avec un rotor court-circuit........
1.6.2 Caractristiques avec un rotor aliment...2.7 Caractristiques oprationnelles de la DFIM connecte un rseau puissant..
2.8 Conclusion.
44
45
47
49
50
51
53
5760
65
CHAPITRE III
Modlisation de la Machine Double
Alimentation
3.1 Introduction...
3.2 Transformation dePark
3.3 Modlisation vectorielle de la DFIM
3.3.1 Introduction de la notion de vecteur tournant..
3.3.3
Modle vectoriel ramen au stator dans le rfrentiel li au stator......
3.3.3Modle vectoriel dans un rfrentiel li au champ tourant
statorique......
3.4 Equation de Concordia..........
3.5 Equation dePark...
66
66
69
69
71
73
74
75
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
12/160
Table des matires
T.3
3.6 Conclusion. 77
CHAPITRE IV
Convertisseur Matriciel:Modlisation et Stratgie
de Commande4.1 Introduction...
4.2 Principe de fonctionnement du convertisseur matriciel
4.3 Interrupteurs semi-conducteurs utiliss dans le convertisseur matriciel
4.4 Protection du convertisseur matriciel....
4.5 Modlisation du convertisseur matriciel...
4.6 Modlisation du filtre d'entre...
4.7 Modlisation de la charge.
4.8 Principe et formulation mathmatique de la technique de modulation de Venturini
4.9 Rsultats de simulation et interprtations..
4.10 Conclusion...
78
79
80
82
82
86
87
88
91
96
CHAPITRE V
Rglage des Puissances Active et Ractive de la
DFIM Alimente par un Convertisseur Matriciel
5.1 Introduction...
5.2 Modlisation de la DFIM en vu d'un rglage dcoupl...
5.3 Contrle vectoriel dcoupl des puissances active et ractive...
5.4 Rglage direct des puissances active et ractive...
5.4.1 Schma bloc de la rgulation...
5.4.2 Calcul des paramtres du rgulateur PI...
5.4.3 Schma synoptique du contrle de la DFIM...
5.4.4 Rsultats de simulation et interprtations ...
5.5 Rglage indirect des puissances active et ractive ...
5.5.1 Rglage sans boucle de puissance...
5.5.1.1Calcul des paramtres du rgulateur PI
5.5.1.2Schma synoptique.
5.5.1.3Rsultats de simulation et interprtations.
5.5.2 Rglage avec boucle de puissance...
5.5.2.1Schma synoptique.
97
98
99
101
102
102
104
105
107
107
107
108
109
111
111
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
13/160
Table des matires
T.4
5.5.2.2Rsultats de simulation et interprtations.
5.6
Tests de robustesse du systme de contrle la variation de la rsistance
rotorique
5.7 Conclusion.
112
119
122
CONCLUSION ET PERSPECTIVES
REFERENCES BIBLIOGRAPHIQUES
ANNEXE..
124
128
137
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
14/160
NOTATIONS ET SYMBOLES
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
15/160
Notations et symboles
1
Notations et symboles
Abrviations
DFIMDFIG
AC/AC
AC/DC/AC
MLI
PI
MC
: Machine Double Alimentation (doubly fed induction machine): Gnratrice Double Alimentation (doubly fed induction generator)
: Alternatif/Alternatif
: Alternatif/Continu/Alternatif
: Modulation de Largeur dImpulsion
: Proportionnel Intgral
: Convertisseur Matriciel
Indices
a, b, c
s, r
d, q
,
n
: Repre triphas (rel)
: Stator et Rotor
: Repre biphas li au champ tournant
: Repre biphas li au stator (fixe)
: Valeur Nominale
Symbolesg
Es
Ers
fs
fr
fm
np
Ns
Nr
Kws
Kwr
Krs
m
v
i
: Glissement
: F.e.m induite dans le stator
: F.e.m induite dans le rotor par l'effet du flux statoriuqe
: Frquence des grandeurs statoriques
: Frquence des grandeurs rotoriques
: Frquence mcanique de rotation du rotor
: Nombre de paires de ples
: Nombre de spires par phase du stator
: Nombre de spires par phase du rotor
: Coefficient de bobinage du stator
: Coefficient de bobinage du rotor
: Rapport effectif entre l'enroulement du stator et du rotor
: Flux maximal dans l'entrefer cre par chaque ple
: Tension instantane
: Courant instantan
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
16/160
Notations et symboles
2
s
r
m
sr
s
r
Rs, Rr, Rm
Ls, Lr, Lm
ls, lr
Ps, Qs
Pr, Qr
Pm
Ce
Cg
: Vecteur flux statorique
: Vecteur flux rotorique
: Vitesse angulaire du rotor (rad/s)
: Pulsation des grandeurs statoriques
: Pulsation des grandeurs rotoriques
: Position angulaire du rotor par rapport au repre fixe (, )
: Position angulaire du repre (d,q) par rapport au repre fixe (, )
: Position angulaire du repre (d,q) par rapport au repre li au rotor
: Rsistances statorique, rotorique et magntisante
: Inductances propre (cyclique) statorique, rotorique et magntisante
: Inductances de fuite statorique et rotorique
: Puissances active et ractive du stator
: Puissances active et ractive du rotor
: Puissance mcanique d'entrainement
: Couple lectromagntique
: Couple dvelopp par la gnratrice
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
17/160
Introduction Gnrale
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
18/160
Introduction gnrale
3
Introduction Gnrale
Lnergie lectrique est un facteur essentiel pour le dveloppement et lvolution des
socits humaines que ce soit sur le plan de lamlioration des conditions de vie que sur le
dveloppement des activits industrielles. Elle est devenue une forme dnergie indispensable
par sa souplesse dutilisation et par la multiplicit des domaines dactivit o elle est appele
jouer un rle de plus dimportant. Ces modes de production ainsi que les moyens de
distribution associs sont amens subir de profonds changements au cours des prochaines
dcennies.
En effet, jusqu prsent la production dlectricit provenait essentiellement de la
filire nuclaire et de la transformation de ressources naturelles fossiles. Ces deux modes de
production posent des problmes dont limportance est croissante au fil des annes. Il sagit
du stockage de dchets nuclaires non retraitables et de la disparition prvue au 21 mesicle,
des principales sources dnergie fossile. Les contraintes environnementales concernant les
rejets dans latmosphre de gaz effet de serre (principalement le CO2et le CH4) renforcent
galement lide dune production dnergie lectrique propre, conomique et durable [FRA
03].
Ainsi, les modes de production reposant sur la transformation dnergie renouvelable
(olien, solaire,) sont appels tre de plus en plus utiliss dans le cadre du dveloppement
durable. Aujourdhui, et grce lvolution rcente de llectronique de puissance et micro-
informatique, le domaine de production de lnergie lectrique vitesse variable, a connu ces
dernires annes un essor considrable.
La littrature atteste du grand intrt accord aujourd'hui la machine doublement
alimente (DFIM) pour diverses applications: en tant que gnratrice pour les nergies
oliennes ou en tant que moteur pour certaines applications industrielles comme le laminage,
la traction ferroviaire ou encore la propulsion maritime. Cet intrt est d essentiellement aux
degrs de libert qu'elle offre du fait de l'accessibilit de son rotor et donc de la possibilit de
l'alimenter par un convertisseur aussi bien du ct du stator que du ct du rotor.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
19/160
Introduction gnrale
4
Le schma de raccordement le plus typique de cette machine consiste raccorder le
stator directement au rseau, alors que le rotor est aliment travers un convertisseur de
puissance contrl. Cette solution est plus attractive pour toutes les applications o les
variations de vitesse soient limites autour de la vitesse de synchronisme vu que ce domaine
de fonctionnement prsente un faible glissement, et par consquent le convertisseur associ au
rotor doit tre trait seulement une fraction de 20 30 % de la puissance nominale du systme
de conversion. Ceci signifie que les pertes dans le convertisseur est moindre (puissance
fournie au rotor est faible) ainsi que le cot de celui-ci s'en trouve rduit. C'est la raison pour
laquelle on trouve cette machine dans les systmes de production en forte puissance vitesse
variable et frquence constante. Une seconde raison est la possibilit de contrler la puissance
active et ractive dans le stator via le contrle du convertisseur de puissance.
Bien que la conversion indirecte de frquence en utilisant une cascade Redresseur-lien
continu-Onduleur soit une technique bien tablie, la conversion directe est toujours peu
connue, mme si dans beaucoup d'applications d'entranements courant alternatif, il est
souhaitable de remplacer le convertisseur de tension conventionnel AC/DC/AC par un
convertisseur plus compact, tout en gardant de bonnes formes d'ondes entre/sortie et la
possibilit de rglage du facteur de puissance lentre. En effet, les rcentes avances en
lectronique de puissance ont permis lmergence du convertisseur matriciel (MC) permettant
une conversion directe AC/AC. Jusqu' prsent, lintrt pour ce convertisseur tait dune
nature plutt acadmique et ainsi il existe trs peu de produit commercialis du convertisseur
matriciel en adquation aux efforts fourni dans de nombreux laboratoires de recherche.
Aujourd'hui, le convertisseur matriciel de puissance est devenu un axe de recherche
important et plus attractif par beaucoup de chercheurs dans le domaine d'entranement ou de
gnration vitesse variable grce aux avantages prsents par celui-ci par rapport aux
convertisseurs classiques comme le cyclo-convertisseur et le cascade redresseur/lien
continu/onduleur, notamment [GHE 08_2, ZHA 98_2]:
la commande dcouple de l'amplitude et la frquence de la tension de sortie;
un courant sinusodal l'entre avec un dphasage ajustable, donc la possibilit
de fonctionner un facteur de puissance unitaire pour n'importe quelle charge;
le rapport entre la tension de sortie et celle de l'entre est maximis au possible;
la possibilit d'avoir un coulement de puissance bidirectionnel et parconsquent d'obtenir un fonctionnement dans les quatre quadrants;
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
20/160
Introduction gnrale
5
un taux d'harmoniques rduit aussi bien pour les courants d'entre que pour les
courants de sortie;
une large gamme de frquence oprationnelle pour la tension de sortie;
l'absence d'un grand condensateur pour le stockage de l'nergie comme dans le
cas d'une cascade redresseur/lien continu/onduleur, ce qui permet de rduire le
cot et le dimensionnement du convertisseur.
Dans la littrature du convertisseur matriciel, on trouve deux stratgies de commande
qui sont principalement adoptes la commande du convertisseur matriciel. La premire est
base sur la mthode de modulation de Venturini et la deuxime sur la modulation par
vecteur spatial SVM. Dans notre travail, le choix est port sur la mthode de modulation de
Venturinien vue d'une commande rapproche du convertisseur matriciel fin de parvenir un
rglage dcoupl des puissances active et ractive gnres par la DFIM. Cette mthode
prsente un avantage exceptionnel par rapport la deuxime mthode, qui rside dans le taux
d'harmoniques rduit. C'est donc dans ce cadre que nous allons adopter un contrle vectoriel
dcoupl des puissances active et ractive de la DFIM bas sur l'orientation de la tension
statorique suivant le rfrentiel synchrone li au champ tournant dont l'objectif d'assurer des
hautes performances et une meilleure excution de la gnratrice double alimentation d'une
part, et d'autre part de rendre le systme insensible aux perturbations extrieures et aux
variations paramtriques.
Au cours de notre travail, nous allons prsenter toutes les tapes franchir pour
parvenir ce rsultat. Les aspects concernant le choix de la configuration de la DFIM, du
convertisseur et la technique de commande rapproche et loigne, jusqu' la simulation du
systme de conversion, sont dcrits dans cette tude. Dans ce contexte, notre thse est
structure comme suit:
Dans le premier chapitre nous allons prsenter un tat de l'art de la machine double
alimentation. En effet, travers une synthse bibliographique d'un certain nombre d'articles de
revues et de confrences, en premier lieu, nous essayerons de mettre en vidence la machine
double alimentation afin dtudier son principe de fonctionnement et dvaluer les avantages
et les performances apports par cette machine, ainsi que les diffrents domaines
dapplication. En plus, une classification et une comparaison des diffrents types de cette
machine seront prsentes. D'autre part, une tude comparative des diffrents types des
convertisseurs de puissance associs la DFIM rencontrs dans la littrature sera effectueafin de dgager les principaux avantages et inconvnients de chaque type.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
21/160
Introduction gnrale
6
En second lieu, nous analyserons les diffrentes stratgies de commande qui ont t testes
avec la configuration considre auparavant. Il apparat que le contrle vectoriel bas sur le
principe d'orientation du flux du stator, du rotor et de l'entrefer est la stratgie de pilotage la
plus utilise pour la DFIM. De cette manire, les tensions, les courants, et les divers flux ont
t pris comme axe de liaison avec le repre tournant ncessaire. Cette stratgie ayant t trs
tudie, elle nous servira de base de travail pour la suite de notre tude.
A la fin de ce premier chapitre, nous situerons le contexte de notre travail et nous choisirons
la configuration du systme, le type de convertisseur utilis, ainsi que la stratgie de
commande adopte ce systme.
Dans le second chapitre nous dvelopperons une tude de la DFIM en rgime
permanent par simulation. Ceci nous permettra dintroduire un modle quivalent pour la
DFIM dont l'objectif de dgager les caractristiques principales: couple-vitesse, courant,
tension, puissances active et ractive, et facteur de puissance. Ceci nous permettra aussi bien
de comprendre au mieux le comportement de la DFIM dans les quatre quadrants de
fonctionnement ainsi que la rpartition des puissances afin de pouvoir choisir le domaine de
vitesse dans lequel la DFIM doit fonctionner dont l'objectif de l'obtention de meilleures
performances.
Le troisime chapitre sera lobjet d'une tude de modlisation de la DFIM pilote par
le rotor en vu du rglage des puissances active et ractive au niveau du stator. Un modle
mathmatique biphas de la partie mcanique et lectrique de la DFIM dans les diffrents
repres sera introduit. Au cours de cette modlisation, notre choix sera port sur le repre li
au champ tournant car il permettra d'obtenir un dcouplage entre la puissance active et
ractive.
Le quatrime chapitre portera sur la modlisation du convertisseur matriciel en tenant
compte du filtre passif l'entre de celui-ci, aprs une description de son principe de
fonctionnement, de sa structure, ainsi que des diffrentes configurations des commutateurs
bidirectionnels adopts celui-ci. En plus, la stratgie de commande par modulation de
Venturini sera galement dtaille. A la fin de ce chapitre et dont l'objectif d'valuer les
performances apportes par ce convertisseur command par la technique considre, une
tude par simulation sera prvue.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
22/160
Introduction gnrale
7
En fin le dernier chapitre sera consacr l'implmentation d'un algorithme de rglage
dcoupl des puissances active et ractive de la DFIM connecte directement au rseau et
pilote par son rotor via un convertisseur matriciel command par la technique de modulation
de Venturini, en se basant sur la thorie de la commande vectorielle. Cet algorithme est bas
d'une part sur l'utilisation du repre synchrone li au champ tournant, et d'autre part sur
l'orientation du flux statorique suivant l'axe direct "d" de ce repre afin de raliser un
dcouplage entre la puissance active et ractive. Finalement, une tude de simulation sera
effectue sous l'environnement Matlab afin de tester et dvaluer les performances apportes
par cet algorithme de rglage et sa robustesse aux variations paramtriques.
On terminera par une conclusion du travail ralis ainsi que par quelques ides en
perspectives.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
23/160
Chapitre 1
Etat de l'art de la machine
double alimentation
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
24/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
8
Etat de l'art de la Machine Double Alimentation
1.1. Introduction
Avant d'aborder la modlisation et la commande de la machine doublement alimente
(DFIM), il est indispensable d'entamer l'tude de l'tat de l'art des travaux qui sont effectus
sur cette machine. Le bilan de cette synthse bibliographique, permet de mettre en vidence
notre travail par rapport ceux dj existants et de dfinir les grands axes de recherche [KHO
06, SAL 07].
Traditionnellement et mme l'heure actuelle, la machine courant continu possde
l'image de marque d'une machine prdispose la vitesse variable, puisque la nature de la
source qu'elle requiert, ainsi que sa commande pour assurer cette fonction sont simples
obtenir.
La machine asynchrone cage, a connu ces dernires annes, grce l'volution
technologique rcente de l'lectronique de puissance et la matrise des techniques de
commande (la commande vectorielle, la commande directe du couple, la commande par mode
glissant,) un essor considrable; et elle est devenue la machine la plus utilise surtout dans
le domaine des entranements vitesse variable car cette dernire prsente l'avantage d'tre
plus robuste et moins coteuse que les autres machines. Cependant celle-ci prsente des
inconvnients tels que la consommation de puissance active, un courant de dmarrage lev,
une limitation en puissance, de mme quelle prsente des grandeurs non mesurables au niveau
du rotor ce qui ncessite une commande plus complique [CAM 03, SAL 07].
La littrature atteste du grand intrt accord aujourd'hui la machine doublement
alimente (DFIM) pour diverses applications : en tant que gnratrice pour les nergies
oliennes ou en tant que moteur pour certaines applications industrielles comme le laminage,
la traction ferroviaire ou encore la propulsion maritime [CAM 03, ELA 04, KHO 06, SAL
07].
Ce chapitre a pour objectif de mettre en vidence la machine double alimentation,
afin dtudier son principe de fonctionnement et dvaluer les avantages et les performances
apports par cette machine, ainsi que les diffrents domaines dapplication de celle-ci. En
plus, une classification et une comparaison des diffrents types de cette machine seront
prsentes. D'autre part, une tude comparative des diffrents types de convertisseurs de
puissance associs la DFIM rencontrs dans la littrature sera effectue afin de dgager lesprincipaux avantages et inconvnients de chaque type.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
25/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
9
1.2. Description de la machine double alimentation
La machine double alimentation en anglo-saxon doubly fed induction machine
(DFIM)est, comme son nom lindique, une machine triphase courant alternatif avec deux
enroulements triphases accessibles, dans lesquels la puissance peut tre fournie ou extraite de
la machine travers ces enroulements [HOP 01, LIN 03].
Ce type de machines ncessite une seule source dalimentation alternative qui peut
alimenter les deux cts de la machine et ceci constitue un avantage principal surtout dans les
domaines dentranement et de gnration vitesse variable, dont le glissement peut tre
modifi au moyen de lassociation des convertisseurs de puissance du ct statorique ou
rotorique ou bien les deux la fois. Ceci dpend essentiellement du facteur technico-
conomique de construction [ABD 96, KOS 74].
1.3. Classification des machines double alimentation
La classification de la machine asynchrone rotor bobin est obtenue partir dune
recherche bibliographique qui a t dveloppe dans la littrature du domaine des machines
double alimentation [AZAI 08, HOP 01, LIN 03, SAL 07].
Machine double alimentation
Machine sans collecteur
Machine double
alimentation en cascade
asynchrone
Machine double
alimentation en cascade
asynchrone simple
armature
Machine double
alimentation sans balais
deux bobinages dans le
stator
Rotor cage Rotor rluctancevariable
Machine double
alimentation rotor
bobin (standard)
Machine double stators
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
26/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
10
Les diffrentes variantes de la machine double alimentation les plus attractives et les
plus dveloppes dans la littrature sont classifies par un organigramme donn
prcdemment. Le schma de principe et la description de chaque variante seront dtaills ci-
dessous.
1.3.1. Machine double alimentation rotor bobin (standard)
La figure (1.1) montre que la machine double alimentation rotor bobin ou standard,
est une machine asynchrone occupe par un systme balais-bague qui alimente l'enroulement
du rotor. La figure (1.2) illustre le schma de principe de ce type de machines, tel que le stator
est aliment directement par le rseau, alors que le rotor est aliment au moyen dun
convertisseur alternatif-alternatif de telle sorte que le glissement de cette machine devient une
grandeur contrlable. Il faut noter que le convertisseur bidirectionnel indiqu dans la figurepeut tre un convertisseur indirect (AC/DC/AC) compos d'un redresseur et d'un onduleur ou
bien un convertisseur direct (AC/AC): cyclo-convertisseur ou convertisseur matriciel [LIN 03,
SAL 07].
Fig. (1.1) :Couped'une machine asynchrone rotor bobine (standard) [CHA 04]
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
27/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
11
1.3.2. Machine double alimentation en cascade asynchrone
La machine double alimentation en cascade asynchrone consiste en deux machines
asynchrones avec des rotors bobins connects mcaniquement et lectriquement, comme il
est montr par la figure (1.3). Le stator de lune des deux machines est connect directement
au rseau alors que lautre est connect au rseau par lintermdiaire dun convertisseur
AC/AC de frquence. Il est galement possible de piloter l'ensemble du systme travers le
stator aliment par le convertisseur.
Ce type de machines offre la possibilit d'avoir une commande dcouple des puissances
active et ractive similaire celle de la machine double alimentation standard [PET 03,
AZAI 08].
Pratiquement, il est aussi possible de combiner deux machines asynchrones rotor
bobin dans une seule machine avec un comportement identique celui de la machine
double alimentation en cascade asynchrone, tel que les deux enroulements des stators sont
logs dans une seule armature et le rotor soit cage dcureuil, comme dans le cas de lamachine double alimentation sans balais.
Fig. (1.2) : Schma de principe de la machine double alimentation rotor bobin (standard)
AC
ACRseau
AC
AC
Fig. (1.3) : Schma de principe de la machine double alimentation en cascade asynchrone
DFIM 1DFIM 2 Couplage lectrique
Couplage mcanique
Rseau
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
28/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
12
1.3.3 Machine double alimentation sans balais
C'est une machine asynchrone avec deux enroulements ayant des nombres de paires de
ples diffrents logs dans la mme armature du stator. Lun des deux enroulements est
aliment directement par le rseau et lautre est aliment au moyen dun convertisseur AC/AC(fig. 1.4). Le rotor de cette machine possde un nombre de paires de ples gal la somme
des deux nombres de paires de ples des deux enroulements statoriques.
Parmi les types les plus connus de machines double alimentation sans balais, on
trouve la machine double alimentation rluctance variable qui consiste en un stator
identique celui de la machine double alimentation sans balais et un rotor bas sur le
principe de la rluctance [PET 03, AZAI 08].
1.4. Comparaison entre les diffrentes variantes de la machine double
alimentation
Le tableau (1.1) donne une brve classification et comparaison des diffrentesvariantes de la machine double alimentation les plus attractives dans la littrature. Dans ce
cas, les critres de comparaison sont fonds sur : la complexit de la construction de la
machine, la puissance trait par le convertisseur associ la machine et la stratgie de
contrle[HOP 01, AZAI 08].
On peut conclure que, toutes les machines double alimentation cites dans le tableau
(1.1) doivent fonctionner pour une vitesse autour de celle de synchronisme et ncessitent pour
leur commande un convertisseur bidirectionnel de puissance. Dans cette condition, plus la
gamme oprationnelle est troite (qui doit tre autour de la vitesse de synchronisme) plus la
Fig. (1.4) : Schma de principe de la machine double alimentation sans balais
AC
AC
Enroulement 2
Enroulement 1
Rseau
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
29/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
13
puissance traite par le convertisseur est rduite. De point de vue stratgie de commande il n'y
a pas de grande diffrence entre ces variantes.
Tab. (1.1) : Classification et comparaison des diffrentes variantes de la machine double
alimentation
Type de la machine
double alimentation
Construction
de machine
Convertisseur
de puissanceMthode de commande
Machine rotor
bobinEtablie
Dpend de la
vitesse
oprationnelle
Orientation du flux statorique
avec le dcouplage entre la
puissance active et ractive
Machine en cascade
asynchroneDifficile
Comme la
machine rotor
bobin
Orientation du flux statorique
avec le dcouplage entre la
puissance active et ractive
Machine sans balais
Spcial, prototypes
disponibles et toujours en
recherche
Comme la
machine rotor
bobin
Orientation du flux rotorique et
orientation simplifie du flux
rotorique comme la machine
rotor bobin
Machine rluctance
variable
Spcial, prototypes
disponibles et toujours en
recherche
Comme la
machine rotor
bobin
Comme la machine rotor
bobin
Commercialement, il est difficile de prvoir quel type de machine double
alimentation sera finalement russi. Cependant, nous pouvons affirmer d'aprs la littrature
que la machine rotor bobin standard et la machine rluctance variable restent plus
attractive par beaucoup de chercheurs. D'autre part, un intrt de plus en plus croissant est
accord actuellement la machine asynchrone en cascade et la machine sans balais, vu que
ces dernires prsentent un rendement lev d au courant rduit dans leurs rotors [HOP 01].
Jusqu' prsent et grce lvolution rcente dans les domaines de llectronique de
puissance et de la micro-informatique, la machine double alimentation standard reste la
machine la plus attractive de l'avis de nombreux chercheurs, vu qu'elle est bien adapte dans
plusieurs domaines dapplication. En effet, elle prsente une construction tablie et simple par
rapport aux autres types. Sa commande se fait sur la base dun convertisseur de puissance
disponible (AC/AC) ; de mme elle possde une commande par orientation de flux statorique
permettant dobtenir un contrle dcoupl des puissances active et ractive.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
30/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
14
1.5. Principe de fonctionnement de la DFIM
La DFIM est une machine asynchrone rotor bobin avec lenroulement du stator
connect directement au rseau. Le rotor est occup par des enroulements triphass relis un
convertisseur de puissance bidirectionnel par un systme ballais-bague.
Dans le cas o les nombres de ples du stator et du rotor sont identiques, la vitesse angulaire
de rotation du rotor est dfinie par :
mpmrsm .n; == (1.1)
Avec:
mest la vitesse mcanique du rotor ;
"s" et "r" dsignent les grandeurs statoriques et rotoriques respectivement ;
npest le nombre de paires de ples.
Le signe plus (+) dans l'quation (1.1) signifie que le champ tournant cr par les
enroulements du stator tourne dans le mme sens que celui cr par les enroulements du
rotor ; c'est--dire que la machine fonctionne en rgime hypo-synchrone ( sm
==
synchrone-hyperrgime0;
synchrone-hyporgime0;
f
fg
s
ms
s
r (1.3)
Les figures (1.5) et (1.6) reprsentent lvolution de la frquence et de la tension du
rotor en fonction du glissement [HOP 01], dans le cas o le circuit du stator est aliment
directement par le rseau (tension et frquence constantes), le rotor tant en circuit ouvert.
D'aprs ces figures, il est clair que les grandeurs rotoriques dpendent de la vitesse
oprationnelle de la machine.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
31/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
15
D'aprs l'quation (1.3) et les figures (1.5) et (1.6), on peut distinguer quatre rgimes de
fonctionnement pour la DFIM :
Stationnaire (g=1) :le stator est aliment directement par le rseau avec une frquence fs ;
par consquent, le rotor est le sige dune F.e.m induite avec une frquence fridentique
fs. Dans cette condition, la DFIM se comporte simplement comme un transformateur.
Hypo-synchrone (0
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
32/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
16
rapport ce dernier, par consquent il ny a aucune tension induite dans les enroulements
du rotor.
Hyper-synchrone (g
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
33/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
17
gnrateur, et si elle est entrane une vitesse infrieure de la vitesse de synchronisme
(rgime hypo-synchrone), la puissance Prest absorbe par le rotor de celle-ci (figure 1.7.c). Si
la vitesse d'entranement augmente au-del de la vitesse de synchronisme (rgime hyper-
synchrone), la puissance Pr change sa direction et le rotor fournit de la puissance pour une
ventuelle rcupration (figure 1.7.d).
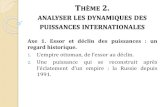
La figure (1.8), montre l'volution des puissances mcanique et lectrique en fonction
de glissement qui sont fournies au rotor de la machine de telle sorte qu'on gnre une
puissance lectrique constante transmise au rseau via le stator de celle-ci (DFIM en mode
gnrateur). A larrt (g=1), la machine se comporte comme un transformateur. Lorsque la
vitesse augmente, la puissance mcanique volue linairement ; par contre la puissance
transmise au rotor dcrot. Une fois la machine atteint sa vitesse de synchronisme (g=0),
lcoulement de la puissance se transmet seulement entre le stator et le rotor. Au del de la
vitesse de synchronisme, le rotor commence aussi fournir la puissance au rseau avec une
volution linaire. On peut conclure d'aprs cette figure que le convertisseur associ au rotor
de la DFIM ne traite qu'une petite fraction de la puissance gnre par le stator dans le cas o
la vitesse d'entranement est proche de celle de synchronisme.
Cette figure montre galement l'avantage d'un systme double alimentation, en
projetant un systme vitesse variable de sorte que la gamme oprationnelle de vitesse soit
autour du point de synchronisme ; la manipulation de puissance du convertisseur de puissance
bidirectionnel peut tre considrablement rduite par rapport au systme simple alimentation.
Par exemple, une gamme de vitesse de 20% autour du point de synchronisme correspondant
une gamme de glissement de 0.2 -0.2. Par consquent, la puissance active maximale traite
par le convertisseur est de l'ordre de 20% de la puissance du stator [HOP 01].
g [p.u]
Puissances[p.u]
Fig. (1.8) : Evolution des puissances de la DFIM (mode gnrateur) en fonction deglissement (pertes ngligeables, couple constant)
gamme de vitesse
Ps
Pr
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
34/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
18
Tab. (1.2) : Modes oprationnels de la DFIM
modes
Moteur
Pm>0
Gnrateur
Pm0
Pr
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
35/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
19
l'accessibilit au rotor et au stator rend la mesure des courants possible, ce qui offre
une grande flexibilit et prcision pour le contrle de flux et du couple
lectromagntique ;
elle offre plusieurs possibilits de reconfiguration grce sa double alimentation ce
qui permet cette dernire de trouver un large domaine d'application ;
elle prsente une puissance massique lgrement plus leve que les autres machines
de grandes puissances ;
fonctionnement possible couple constant au-del de la vitesse nominale ;
le convertisseur li au rotor est dimensionn au tiers de la puissance nominale de la
machine pour une vitesse de fonctionnement autour de celle de synchronisme, dans ce
cas les pertes dans les interrupteurs semi-conducteurs sont faibles, et par consquent
un rendement lev du systme de conversion.
1.7.2 Inconvnients de la DFIM
Comparativement la machine asynchrone cage, la DFIM prsente des inconvnients
lis essentiellement au systme balais-bague comme :
Machine plus volumineuse que celle cage grce la prsence du systme balais
bague;
La prsence du systme engendre des effets indsirables sur la machine comme lesfrottements ;
Elle est moins fiable que celle cage cause de la prsence du systme balais-bague
et le bobinage du rotor ;
Ncessite une maintenance priodique, ce qui va augmenter le cot d'exploitation.
1.8 Domaine dapplication de la DFIM
1.8.1 Dans les systmes d'entranement vitesse variableLes systmes d'entranement lectriques transforment l'nergie lectrique en nergie
mcanique pour des applications utiles. Dans ce cas, le moteur lectrique est le composant
noyau d'un tel systme d'entranement lectrique.Gnralement, il y a trois critres essentiels
pour la slection des moteurs lectriques pour les applications dans les systmes
d'entranement vitesse variable :
Rendement nergtique ;
Exigence de la commande en vitesse ou en position ; Amlioration de la rponse en rgime transitoire.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
36/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
20
Le moteur, le convertisseur statique et le systme de commande sont les trois lments
constructifs dans les systmes d'entranement vitesse variable (figure 1.9). Dans ce cas, le
moteur doit assurer la rotation dans un sens ou l'autre avec la possibilit de freinage dans les
deux sens. Le convertisseur de puissance a pour objectif de contrler l'coulement de
puissance entre la source d'alimentation et le moteur. Son choix est affect par le niveau de
puissance, les quadrants oprationnels du moteur et la qualit de puissance. L'algorithme de
commande est utilis pour gnrer les signaux de commande pour le convertisseur de
puissance, afin de contrler le couple, la vitesse ou la position [TAN 94].
Grce au dveloppement rapide du moteur, du convertisseur et de la commande et leur
intgration, le domaine d'entranement vitesse variable a connu ces dernires annes un
essor considrable notamment ce qui concerne l'amlioration du rendement nergtique et les
hautes performances dynamiques offertes par celui-ci. Par consquent, le choix d'un tel
systme d'entranement vitesse variable s'appuit gnralement sur les critres suivants :
le cot ;
la fiabilit ;
les performances (rapidit, prcision et robustesse) ;
le rendement nergtique ;
la taille et le poids.
Le moteur asynchrone rotor bobin offre des nombreux avantages par rapport au
moteur asynchrone et synchrone surtout en ce qui concerne la gamme de la vitesse
oprationnelle et de la puissance dentranement. De plus, il prsente un comportement souple
la commande, ce qui lui permet de trouver un domaine dapplication trs vaste tel que le
laminoir, la traction ferroviaire, la propulsion des navires, le vhicule lectrique, le ventilateur
et la pompe deau.
Source de l'nergie
lectrique
Convertisseur
statique
Machine
lectrique
Charge
mcanique
Algorithme de
commande
Elments
auxiliaires
(Capteurs)
Fig. (1.9) :Architecture d'un systme d'entrainement vitesse variable
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
37/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
21
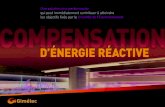
1.8.2 Dans les systmes de gnration olienne vitesse variable
Une olienne vitesse variable a pour rle de convertir l'nergie cintique du vent en
nergie lectrique avec un rendement optimis. Par consquent, les diffrents lments du
systme olien sont conus pour maximiser cette conversion nergtique et d'une manire
gnrale, une bonne adquation entre les caractristiques couple/vitesse de la turbine et de la
gnratrice lectrique est indispensable. La figure (1.10), prsente la caractristique de la
puissance maximale capte en fonction de la vitesse de la turbine pour des diffrentes vitesses
du vent, dans le cas o l'orientation des pales est parfaitement ralise [TAN 94, ELA 04,
MIR 05].
Dans les systmes oliens de production de l'nergie lectrique vitesse variable, il
existe une solution nouvelle et originale, utilisant la machine asynchrone rotor bobin. Cettesolution est plus attractive pour toutes les applications o les variations de vitesse sont
limites autour de celle de synchronisme dont l'objectif d'avoir un convertisseur de puissance
dimensionn une fraction de 20-30 % de toute la puissance de systme, et ce qui permet de
minimiser les pertes et rduire le cot de celui-ci, [PET 03].
Dans la littrature, il existe deux catgories d'oliennes telles que les oliennes isoles
(autonomes) et les oliennes connectes au rseau.
1.8.2.1 Eolienne isole (autonome)
Les oliennes autonomes sont utilises dans des gammes de puissances de quelques
dizaines de Watts quelques dizaines de kW pour l'alimentation d'appareils lectriques
d'instrumentation ou d'clairage. Les plus petites oliennes sont utilises pour les bateaux, le
Vitesse de la turbine [rad/s]
Puissanceduven
t[W]
Puissance maximale
Vitesse du vent
v5> v4> v3>v2>v1
Fig. (1.10) :Caractristique puissance-vitesse de la turbine pour des diffrentes
vitesses du vent.
v1v2
v3
v4
v5
Pvmax1
Pvmax2
Pvmax3
Pvmax4
Pvmax5
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
38/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
22
camping ou les stations mto. Les oliennes de plus grande puissance sont utilises pour la
production destine alimenter en nergie lectrique des villages isols [BOY 06].
Les points communs entre toutes ces oliennes sont leur faible puissance et leur association
une unit de stockage d'nergie, gnralement constitue de batteries d'accumulateurs (Fig
1.11), [CHE 06, BOY 06].
1.8.2.2 Eolienne connecte au rseau :
Les oliennes connectes au rseau de distribution sont souvent en fonctionnement
pour tester le potentiel olien du site considr appartenant des industriels ou des privs qui
produisent leur propre lectricit et revendent l'excdent au distributeur local.
Ce type de production dcentralise est rencontr de plus en plus avec le dveloppement
des primes et autres aides la production d'nergie lectrique propre. Les puissances de ces
oliennes peuvent varier, selon qu'il s'agit d'un exploitant priv ou industriel, de 50 kW 4.5
MW pour les plus rcentes oliennes du march. On estime que cette puissance augmentera
l'avenir, particulirement dans des applications en mer (Fig.1.12) [MUL 03], vu que ce milieu
est caractris par une vitesse de vent trs importante. Ces oliennes fonctionnent en
permanence et ont, le plus souvent, besoin d'tre raccordes un rseau puissant afin de
minimiser l'impact des fluctuations de la puissance gnre par ces dernires.
Multiplicateur de
vitesse
DFIM
Pvent
Fig. (1.11): Eolinne isole base de la DFIM.
Turbine
Convertisseur
AC/AC
Unit de
stockage
Charge
Pale
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
39/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
23
Actuellement, la majorit des oliennes installes de puissance suprieure 1 MW
utilisent une machine asynchrone rotor bobin (DFIM) pilote par le rotor [MUL 03].
La figure (1.13) prsente le schma typique d'une olienne base de la machine
asynchrone rotor bobin connecte directement au rseau par son stator et alimente par
convertisseur AC/AC au niveau du rotor dimensionn pour faire trait une puissance rotorique
qui reprsente environ 30 % de la puissance nominale pour une vitesse d'entranement autour
de celle de synchronisme de la machine considre. Cest le principal intrt de ce type de
machines [SAL 07].
Fig. (1.12) : Eolienne installe en mer [MUL 03]
Multiplicateur de
vitesse
TransformateurDFIM
Rseau
Pvent
Fig. (1.13):Eolienne connecte au rseau base de la DFIM
Turbine
Convertisseur
AC/AC
Turbine
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
40/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
24
1.9 Les diffrentes configurations de l'association DFIM/convertisseur de
puissance
La DFIM offre plusieurs possibilits de configuration avec son association avec les
convertisseurs de puissance. Ces configurations dpendent essentiellement du domaine
d'application de la DFIM. D'aprs la littrature, on peut distinguer les configurations
suivantes.
1.9.1DFIM avec un convertisseur AC/AC associ au rotor
Cette configuration qui est l'objectif de notre travail, est largement rpondue dans les
applications vitesse variable. Elle consiste connecter le stator de la DFIM directement au
rseau, alors que le rotor est aliment par un convertisseur AC/AC (figure 1.14). En plus, cette
dernire offre la possibilit d'avoir une commande dcouple des puissances active et
ractive, de mme qu'elle a un cot d'investissement rduit par rapport aux autres
configurations. Ces avantages expriment l'utilisation trs vaste de cette configuration de la
DFIM dans l'industrie et surtout dans les domaines des oliennes vitesse variable. La
configuration considre utilise des diffrents types des convertisseurs de puissances qui
seront exposs par la suite [LEO 97, PER 04, KHO 06, SAL 07].
Les travaux prsents dans la littrature de la DFIM montrent les bonnes performances
de cette dernire avec cette configuration. Ces travaux s'intressent principalement aux
stratgies de commande. Dans notre travail nous nous intressons non seulement aux
stratgies de commande de la DFIM mais aussi aux convertisseurs de puissances associs
cette dernire. Un choix adquat et convenable sera fait en fonction de notre problmatique.
Fig. (1.14) : Schma synoptique de la DFIM avec un convertisseur AC/AC associ au rotor
Convertisseur
de puissanceDFIM Transformateur
Rseau 3 50 Hz
AC
AC
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
41/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
25
1.9.2. DFIM avec deux convertisseurs AC/AC
Cette solution consiste alimenter la DFIM par deux convertisseurs AC/AC, l'un au
stator et l'autre au rotor (figure 1.15). Cette dernire est gnralement plus rependue dans les
systmes d'entranement vitesse variable que ceux de gnration. Cette configuration offre
une grande souplesse la commande que celle prcdente (figure 1.14), ainsi qu'elle permet
de partager la frquence de rotation du rotor entre les deux convertisseurs, ce qui rduit les
pertes fer dans la machine et par consquent augmente le rendement [VID 04]. En plus, elle
prsente dans les applications de grandes puissances de bonnes performances trs basses
vitesses pour un fonctionnement sans capteur de vitesse, ainsi qu'elle offre la possibilit de
fonctionner en survitesse sans dmagntisation. Cependant, cette configuration prsente des
inconvnients majeurs notamment [DRI 05, KHO 06, SAL 07, VID 04]:
Elle est plus volumineuse. L'aspect multi-convertisseurs augmente le nombre de
convertisseurs et par consquent, le prix.
Le march traditionnel est domin par la premire configuration (figure 1.14) qui est
trs tudi et trs connue.
Elle ncessite une commande plus ou moins complique par rapport la premire
configuration.
1.10 Convertisseurs de puissance associs la DFIM
Bienquela puissance du rotor (de glissement) de la DFIM peut tre contrle partir
de la vitesse et du couple de celle-ci. Une simple et primitive mthode de contrle de lavitesse de la DFIM en mode moteur consiste modifier la rsistance rotorique. Si l'on utilise
Fig. (1.15) : Schma synoptique de la DFIM avec deux convertisseurs AC/AC
Convertisseur
de puissanceDFIM
Rseau 3 50 Hz
AC
AC
AC
AC
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
42/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
26
pour cela un rhostat, on dissipe l'nergie active comme des pertes et on abaisse de faon
inacceptable le rendement du systme. Les avantages de cette mthode font que la machine
peut avoir un dmarrage souple avec un couple maximale sans pic de courant et sans
harmoniques transmis au rseau avec un facteur de puissance lev. Par consquent et pour
que le procd soit viable, il faut faire appel un convertisseur de puissance qui permet la
rcupration de l'nergie correspondante en la rinjectant dans le rseau dont le but
d'amliorer le rendement. D'aprs la littrature de la DFIM[DRI 05, LEO 97], on trouve deux
types de convertisseur qui sont utiliss pour contrler la puissance de glissement, notamment
celui propos par Kramerqui consiste utiliser un convertisseur AC-AC unidirectionnel en
rgime hypo-synchrone et celui utilis dans la mthode de Scherbius qui emploie un
convertisseur bidirectionnel en rgimes hypo/hyper synchrone. Pour une gamme de vitesse de
fonctionnement de la DFIM autour de sa vitesse de synchronisme [BOS 06, TEC Ing], la
DFIM prsente une puissance de glissement rduite et ce qui permet galement de rduire les
dimensions du convertisseur de puissance.
Le convertisseur statique est connect aux enroulements du rotor de la DFIM par un
systme ballais-bague. Il est dimensionn pour une puissance rotorique snmaxrn pgP = , avec
gmax: la valeur maximale de glissement et Psn: la puissance nominale du stator. En gnral,
max
g
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
43/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
27
Les configurations des convertisseurs de puissances mentionnes prcdemment diffrent
en termes de cots, des quadrants oprationnels (deux ou quatre quadrants), des rgimes de
fonctionnement (rgime hypo-synchrone ou hyper-synchrone), des harmoniques du courant,
et de la rapidit de rponse la commande [BOL 06].
1.10.1 Redresseur non/et contrlable associ un onduleur MLI
thyristors
Si le redresseur non contrlable ( diodes) est utilis dans le ct rotorique de la
machine, l'coulement de la puissance du glissement est unidirectionnel, il se fait du rotor vers
le rseau par l'intermdiaire d'un transformateur lvateur. Dans ce cas, la DFIM peut
fonctionner comme moteur hypo-synchrone (g>0) et comme gnrateur hyper-synchrone
(g
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
44/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
28
machine au point de synchronisme n'est pas faisable, mais le passage par ce point est possible
[BOL 06].
Le convertisseur AC-AC indirect montr par la figue (1.16) a deux types de
commutation soit naturelle ou bien force. La commutation force peut amliorer la situation
en terme de commutation plus rapide et plus sre et en terme de facteur de puissance
contrlable, alors que le cot d'exploitation devient important. La prsence d'une grande
bobine de lissage dans le bus continu demeure un inconvnient srieux en termes du cot et
de dimensionnement du convertisseur.
1.10.2 Cycloconvertisseur
Dans la configuration de la figure (1.16), le convertisseur redresseur/onduleur est
remplac par un cycloconvertiseur de sorte que l'coulement de la puissance de glissement
puisse tre command dans les deux directions (figures 1.17 et 1.18). Par consquent, on
obtient un fonctionnement en quatre quadrants de la DFIM. Dans ce cas la gamme
oprationnelle de la vitesse est typiquement limite 50 % de la vitesse de synchronisme. La
frquence maximale la sortie du cycloconvertisseur base d'un redresseur triphas point
mdian est de l'ordre de 1/3 de la frquence d'entre (figure 1.17), alors qu'elle est de l'ordre
de 1/2 de la frquence d'entre pour le cycloconvertisseur base de deux redresseurs triphass
en pont (figure 1.18). L'inversement du sens de rotation de la machine n'est pas possible dansce cas (de mme que pour la configuration avec redresseur-onduleur), parce que cette
situation ncessite l'inversion de l'ordre des phases d'alimentation du stator.
DFIM
Rseau 3
50Hz
Transformateur
abaisseur
Fig. (1.17) : Cycloconvertisseur base d'un redresseur triphas point mdian par phase
gPr
Redresseur triphas
point mdian
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
45/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
29
Le cot trop cher et la complexit de la commande constituent les principaux
inconvnients pour le cycloconvertisseur ; cependant celui-ci offre des avantages comme celui
du courant rotorique qui est proche de la forme sinusodale, ce qui conduit des pertes
d'harmoniques rduites, et un facteur de puissance totalement contrlable au niveau du stator
[BOL 06, BON 98, DEL 07, SKV 02, TEC Ing].
1.10.3 Redresseur MLI de courant associ un onduleur MLI de tension
Les configurations prsentes prcdemment (figures 1.17 et 1.18) peuvent amener des
amliorations considrables aux performances si le cycloconvertisseur est remplac par un
redresseur MLI de courant associ un onduleur MLI de tension. Dans ce cas, il est possible
de contrler l'coulement de puissance de glissement dans les deux directions, par
l'implmentation d'une commande vectorielle aux deux convertisseurs. En plus, la frquence
de sortie du ct rotorique fr est limite seulement par la frquence de commutation des
interrupteurs de puissance qui peuvent tre des GTOs, IGBTs et IGCTs.
DFIM
Transformateur
abaisseur
Fig. (1.18) : Cycloconvertisseur base d'un redresseur triphas en pont par phase
gPr
Rseau 3
50Hz
Redresseur
triphas en pont
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
46/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
30
Le convertisseur deux niveaux base des transistors IGBTs (figure 1.19) est
gnralement utilis aujourd'hui jusqu' 2 3 MW pour une tension de sortie de 690 V par
ligne. Pour des puissances suprieures 10 MW et des tensions suprieures 10 kV, les
convertisseurs multi-niveaux AC-AC avec un bus de tension continu sont adopts pour
l'alimentation de la DFIM.
La prsence d'un grand condensateur dans le bus de tension continu a pour objectif de
gnrer une puissance ractive contrlable ;la haute frquence de commutation (au-dessus de
1 kHz) permet de dcaler les harmoniques du courant dans le ct rotorique vers les hautes
frquences et ce qui facilite le procd de filtrage. D'autre part, la commutation rapide des
commutateurs de puissance prvoit une rponse trs rapide des puissances active et ractive.
Le convertisseur AC/AC avec un bus continu considr, constitue une solution
adquate pour un fonctionnement de la DFIM vitesse variable dans les quatre quadrants tout
en assurant son fonctionnement une vitesse de synchronisme. [BAR 07, BOS 06, BOL 06,
CAR 98, OTT 00].
1.10.4 Convertisseur Matriciel
Le convertisseur matriciel est une nouvelle gnration de convertisseurs directs
AC/AC, qui est constitu par des interrupteurs de puissance bidirectionnels ultra rapides.
Gnralement il a une topologie d'une source de tension. L'apparition des IGBTs et de
contrleurs puissants DSP permettent de mettre en vidence le convertisseur matriciel et
Fig. (1.19) : Redresseur MLI de courant associ un onduleur MLI de tension
C
Redresseur MLI
de courant
Onduleur MLI
de tension
DFIM
Transformateur
abaisseur
gPr
Rseau 3
50Hz
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
47/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
31
d'exploiter les hautes performances apportes par celui-ci par rapport aux convertisseurs de
puissances traditionnels. La tension la sortie de celui-ci est forme par des sections de
tensions d'entre l'aide de techniques de commande MLI intelligentes. A l'entre du
convertisseur matriciel, on place un filtre LC pourle filtrage des harmoniques [BOL 06, IMA
06, LEE 06, PIN 07].
Le convertisseur matriciel offre plusieurs avantages par rapport aux convertisseurs
AC/AC prsents prcdemment notamment :
l'absence d'lments de stockage de puissance (comme dans le cas de l'association
Redresseur-Onduleur), ce qui augmente sa dure de vie ;
fonctionnement dans les quatre-quadrants et en grandes puissances, une commande
souple et dcouple des puissances active et ractive, de mme qu'on obtient une
fonctionnement avec un facteur de puissance ajustable ;
ultra rapide ;
un taux d'harmoniques modr et une frquence de sortie contrlable indpendamment
de celle de l'entre ;
fonctionnement possible avec un facteur de puissance unitaire l'entre.
La ralisation pratique du convertisseur matriciel exige des interrupteurs bidirectionnels
capables de bloquer la tension et le courant dans les deux directions, mais jusqu' nos jour ce
genre d'interrupteurs ne sont pas disponibles ce qui mne raliser ces derniers par la
combinaison d'interrupteurs comme les IGBTs, MCTs, IGCTs et MOSFETs avec les diodes
[WHE 04](figure 20).
S12S11 S13
S32S31 S33
S22S21 S23
Filtred'entreLC
Fig. (1.20) : Convertisseur matriciel
DFIM
Transformateur
abaisseur
gPr
Rseau 3
50Hz
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
48/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
32
Comparativement aux convertisseurs classiques associs la DFIM, peu d'articles
traitent l'association du convertisseur matriciel la DFIM. Les quelques articles que l'on peut
trouver peuvent tre qualifis d'articles de rfrence et tentent de traiter en gnral la
modlisation et les stratgies de commande du convertisseur matriciel associ la machine
asynchrone cage et la machine synchrone[BOUC 98, IMA 06, LEE 06, WHE 02, WHE
04]. Les auteurs n'ont pas tranch de faon satisfaisante sur l'application du convertisseur
matriciel l'alimentation de la DFIM. Trs peu d'applications sont nommes ou vises
directement [ZHA 97, CHE 06, BAR 07, SUN 08].Pourtant, les avantages offerts par ce type
de convertisseur dans les applications exigeant une vitesse variable sont plus qu'vidents et
c'est pour cette raison nous avons orient notre travail dans ce sens de recherche.
1.11 Caractristique des interrupteurs semi-conducteur utiliss dans le
domaine vitesse variable
Aujourd'hui, le domaine d'entranement ou de gnration vitesse variable a connu un
essor considrable grce aux dveloppements des outils informatiques et des interrupteurs
semi-conducteurs puissants et performants, et ce qui offre la possibilit de raliser et de
dvelopper des convertisseurs de puissance et leurs commandes selon les besoins de
l'industrie.
Les systmes d'entranement et de gnration base de la DFIM prsents auparavant
utilisent diffrents types de convertisseurs qui peuvent tre caractriss en tant que
convertisseurs semi ou totalement commandables. Les convertisseurs semi-commandable sont
raliss base de thyristors ce qui les rend ces conomiques et fiables, sauf que la
consommation de l'nergie ractive et la gnration des harmoniques du courant qui
prsentent des difficults au filtrage constituent les inconvnients majors de ces derniers.Les
convertisseurs totalement commandables sont typiquement raliss par des thyristors GTO ou
des transistors ce qui conduit un fonctionnement haute frquence de commutation et par
consquent, les harmoniques sont dcals aux ordres suprieures ce qui facilite la procdure
de filtrage. Aujourd'hui le transistor le plus utilis est l'IGBT comme il est illustr dans le
tableau 1.3 [BON 98, HAN 01, ACK 05, OTT 00, BOS 06], la frquence typique de
commutation de ce transistor se situe dans la gamme de 2 20 kHz. En revanche, les
convertisseurs base de thyristors GTO ne peuvent pas atteindre des frquences de
commutation au-del de 1 kHz.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
49/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
33
Tab. (1.3) : Caractristiques d'interrupteurs semi-conducteur
Types d'interrupteurs semi-conducteur
GTO IGCT BJT MOSFET IGBT
Tension max (V) 6000 6000 1700 1000 6000
Courant max(A) 4000 2000 1000 28 1200
Intervalle de la
frquence de
commutation (kHz)
0.21 13 0.55 5100 220
Technique de
commandeHaute Basse moyenne basse Basse
Domaine
d'application
Trs fortes
puissances
Fortes
puissances
Moyennes
et fortes
puissances
Faibles
puissances
Moyennes
et fortes
puissances
Avec :
GTO: gate turn-off thyristor;
IGCT:integrated gate commutated thyristor;
BJT: bipolar junction transistor;
MOSFET:metal oxide semiconductor field effect transistor;
IGBT:transistors jonction et effet de champ (insulated gate bipolar transistor).
1.12 Etat de l'art sur les stratgies de commande de la DFIM
La littrature porte un grand intrt la machine asynchrone rotor bobin en tant que
moteur, dans le domaine des entranements vitesse variable et en tant que gnratrice dans le
domaine de gnration de l'nergie lectrique vitesse variable notamment dans les systmes
oliens.
Par ailleurs, la DFIM et grce sa double alimentation offre plusieurs possibilits de
reconfiguration comme il est montr auparavant. Dans ce qui suit, nous prsentons les travaux
significatifs consacrs la DFIM. Pour chacun d'entre eux, nous mentionnerons l'application
vise de la DFIM, la stratgie de commande adopte ainsi que le type de convertisseur utilis
et leur stratgie de commande. Dans ce cas, nous nous intresserons seulement aux travaux
concernant la configuration avec un seul convertisseur li au rotor qui constitue le but de notre
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
50/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
34
travail. Cet axe de recherche est trs riche aux travaux des chercheurs, vu l'intrt port aux
nergies renouvelables et plus prcisment l'nergie olienne.
1.12.1 Fonctionnement moteur
Pour le cas de l'application moteur de la DFIM, la majorit des tudes ont t
consacres aux stratgies de commande linaires et non linaires avec ou sans capteur de
vitesse ou de position. Dans ces tudes, on trouve la commande vectorielle par orientation du
flux statorique ou d'entrefer comme la stratgie la plus attractive. Gnralement, les
convertisseurs utiliss sont soient les cycloconvertisseurs ou les onduleurs base d'IGBTs.
L. Morel [MOR 98] a ralis une tude d'une DFIM dont le stator est reli au rseau et le
rotor est aliment par un onduleur. Il assure que cette configuration permet de dimensionner le
convertisseur de puissance reli au rotor 20% de la puissance mcanique maximale. Lacommande vectorielle effectue est champ orient. Afin d'obtenir un moteur ou un
gnrateur vitesse variable, il propose de passer par trois modes diffrents pour amener la
vitesse du moteur de zro sa vitesse nominale : mode I, dmarrage du moteur avec les
enroulements statoriques en court-circuit ; mode II, connexion du stator au rseau ; mode III,
alimentation du stator de la DFIM par rseau (tension et frquence fixe), ainsi que le rotor par
un convertisseur de puissance. Le fonctionnement d'un tel systme durant les diffrents modes
est tabli avec une validation par des rsultats exprimentaux.
B. Hopfensperger[HOP 00], propose l'tude d'une DFIM dont le stator est reli un rseau
triphas, alors que le rotor est aliment par un onduleur MLI associ un redresseur. Il
s'intresse au fonctionnement en mode moteur et vise des applications vitesse variable. Il
adopte une commande vectorielle par l'orientation du flux statorique avec et sans capteur de
position. Dans le cas de l'absence du capteur de position, il propose deux mthodes pour
dterminer la position angulaire du repre li au flux statorique : une premire base sur la
mesure et l'expression des composantes du courant statorique dans le repre tournant
considr, la seconde ncessite la mesure des puissances active et ractive statoriques.
Ensuite, cette tude est valide par des rsultats exprimentaux.
M. Machmoum [MAC 92], propose une tude des performances d'une DFIM en rgime
permanent dont le stator est connect au rseau, alors que le rotor est aliment par un
cycloconvertisseur de courant. Son tude vise des applications vitesse variable, que le
fonctionnement soit en moteur ou en gnrateur. L'auteur choisit une stratgie de commande
qui consiste aligner l'axe "d" de son repre tournant avec le courant rotorique dont le but de
contrler les courants rotoriques et l'angle de charge (dphasage entre la tension statorique et
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
51/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
35
le repre considr). L'expression analytique du couple est divise en deux parties, une partie
due au courant rotorique et l'autre due l'interaction entre l'alimentation du stator et celle du
rotor. Cette tude est valide par des rsultats exprimentaux qui permettent de conclure que
la stabilit du systme est tablie dans une gamme limite de la variation de l'angle de charge.
S. Peresada [PER 99], propose un rgulateur par retour d'tat de la vitesse et du flux d'un
moteur asynchrone rotor bobin dont le stator est aliment directement par le rseau alors
que le rotor est aliment par l'association redresseur/onduleur MLI. L'auteur vise deux buts
principaux : le premier est degarantir une bonne poursuite de la vitesse sa rfrence, et le
deuxime est le rglage de la puissance ractive du ct statorique autour de sa valeur nulle en
rgime permanant.Dans ce cas, L'estimation du courant rotorique et la mesure de la vitesse
comme un retour d'tat sont ncessaires pour construire ce rgulateur. Il propose une approche
originale pour concevoir le rgulateur qui consiste dcomposer le modle de la DFIM en
deux sous-systme coupls : le premier est celui du flux statorique et le deuxime est celui de
la vitesse. Il constate que, le sous-systme du flux est exponentiellement stabilis et
indpendant du comportement de vitesse, alors que le sous-systme de la vitesse est
asymptotiquement linaris et dcoupl de la dynamique du flux et par consquent la stabilit
asymptotique globale du systme complet est thoriquement tablie.Son tude est valide par
des rsultats de simulation.
H. Azaza[AZA 02, AZA 05], traite la commande d'un moteur asynchrone rotor bobin dont
le stator est aliment directement par le rseau alors que le rotor est aliment par l'association
des deux onduleurs MLI de tensions contrls en courant et spars entre eux par un lien
continu. Les deux onduleurs sont commands par la stratgie de commande vectorielle base
sur l'orientation du flux statorique. L'application de la commande vectorielle par orientation
du flux statorique l'onduleur du ct rotorique permet d'obtenir de hautes performances en
rgimes permanant et transitoire. L'opration facteur de puissance unitaire est ralise par la
commande vectorielle des puissances active et ractive. Cette tude est valide par des
rsultats de simulation.
C. Batlle [BAT 07], propose une commande vectorielle par l'orientation de la tension
statorique pour le rglage des puissances active et ractive au niveau du stator d'une machine
asynchrone rotor bobin alimente par l'association redresseur/onduleur MLI au niveau du
rotor, alors que le stator est connect directement au rseau. Cette mthode permet d'obtenir
une commande dcouple des puissances active et ractive par le rglage des composantes du
courant statorique, dont la stabilit globale du systme DFIM est assure. Cette tude estvalide par la simulation et par l'exprimentation.
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
52/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
36
I. Shapoval[SHA 08], prsente un algorithme de commande vectorielle indirecte du couple et
de la puissance ractive de la machine asynchrone rotor bobin alimente par un
convertisseur matriciel au niveau du rotor, alors que le stator est aliment directement par le
rseau. Cette mthode est base sur l'orientation du rfrentiel suivant le vecteur de la tension
statorique. L'auteur a adopt la stratgie de commande par modulation vectorielle SVM
(space vector modulation) pour le convertisseur matriciel. Il prsente ensuite quelques
rsultats exprimentaux pour les deux modes de fonctionnements de la DFIM (moteur ou
gnrateur). Il constate que l'algorithme propos assure une bonne poursuite du couple sa
rfrence et garantit un fonctionnement avec un facteur de puissance unitaire. Les formes
d'ondes des courants obtenues l'entre du stator et l'entre du convertisseur matriciel sont
satisfaisantes (proches de la forme sinusodale).
A. K. Dalal[DAL 06], propose une tude de simulation sur la commande de la vitesse par des
rgulateurs PI du moteur asynchrone rotor bobin dont le stator est aliment directement
par le rseau, alors que le rotor est aliment par un convertisseur matriciel afin de raliser une
commande avec un facteur de puissance unitaire. La technique de commande MLI vectorielle
est adopte pour la commande du convertisseur matriciel. Cette tude est valide par
simulation. D'aprs les rsultats de simulation, l'auteur constate que le rglage de la puissance
de glissement par un convertisseur matriciel apporte une amlioration significative au niveau
de la qualit de puissance du systme considr par rapport au cycloconvertisseur. Ceci est
prouv par un courant quasiment sinusodal avec un facteur de puissance unitaire l'entre du
convertisseur matriciel, ainsi qu'une tension presque sinusodale la sortie de celui-ci, qui
permet d'avoir un courant sinusodal dans le rotor, et ce qui conduit une amlioration du
rendement et une rduction du taux d'harmoniques dans le systme.
S. Sunter[SUN 08]fait l'tude d'une commande par l'orientation de flux rotorique base sur
le principe de la rcupration de la puissance de glissement d'un moteur asynchrone rotor
bobin. Le systme d'entranement propos utilise un convertisseur matriciel command par la
technique de modulation Venturinisimplifie au lieu d'un convertisseur AC-DC-AC, pour la
rcupration de la puissance de glissement dans le rotor et la rinjection dans le stator qui est
connect directement au rseau. Il constate que l'opration en rgimes hypo-synchrone et
hyper-synchrone du systme d'entranement propos est possible. Des rsultats de simulation
qui prsentent les rponses de la vitesse, du couple lectromagntique, des courants l'entre
et la sortie du convertisseur matriciel et des puissances, attestent du bon comportement du
systme d'entranement propos. L'auteur constate que les rsultats obtenus montrent que lesystme d'entranement base d'un convertisseur matriciel fonctionne efficacement en rgime
-
7/21/2019 CONTROLE DES PUISSANCES ACTIVE ET REACTIVE DE LA MACHINE A DOUBLE ALIMENTATION (DFIM).pdf
53/160
Chapitre 1 Etat de l'Art de la Machine Double Alimentation
37
hypo-synchrone et ceci rside dans la forme propre (sans harmoniques) de la puissance de
glissement rinjecte au rse