Contrôle de rythme dans un modèle du cycle de la protéine per chez la Drosophile Béatrice...
14
Contrôle de rythme dans un modèle du cycle de la protéine per chez la Drosophile Béatrice LAROCHE, Daniel CLAUDE, Jean CLAIRAMBAULT Université Paris Sud-L2S SUPELEC, Plateau du Moulon 3 rue Joliot-Curie 91190 Gif sur Yvette INRIA Rocquencourt BP105 78153 LE CHESNAY CEDEX EPI 0118 INSERM "Chronothérapeutique des Cancers" Hôpital Paul Brousse 14 avenue P.V. Couturier 94807 Villejuif Cedex (France)
-
Upload
heloise-billon -
Category
Documents
-
view
107 -
download
3
Transcript of Contrôle de rythme dans un modèle du cycle de la protéine per chez la Drosophile Béatrice...

Contrôle de rythme dans un modèle du cycle de la protéine per chez la Drosophile
Béatrice LAROCHE, Daniel CLAUDE, Jean CLAIRAMBAULT
Université Paris Sud-L2S
SUPELEC, Plateau du Moulon
3 rue Joliot-Curie91190 Gif sur Yvette
INRIA Rocquencourt
BP105
78153 LE CHESNAY CEDEX
EPI 0118 INSERM"Chronothérapeutique des Cancers"
Hôpital Paul Brousse14 avenue P.V. Couturier
94807 Villejuif Cedex (France)

PER0
(P0)per mRNA (M)
per transcription nuclear PER (PN)
PER1
(P1)PER2
(P2)
V1
V2
V3
V4
s
d
m
k1 k2
-
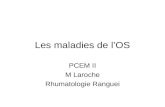
MODELE DE SYNTHESE DE LA PROTEINE per CHEZ LA DROSOPHILE
(d’après A. Goldbeter, Biochemical Oscillations and Cellular Rhythms)

SYNTHESE DE LA PROTEINE per CHEZ LA DROSOPHILEMODELE MATHEMATIQUE
(d’après A. Goldbeter, Biochemical Oscillations and Cellular Rhythms)
M= quantité d’ARN messager,
PN,P2,P1,P0= quantités de protéines PER nucléaire, di-,mono-,
et non-phosphorylés.
N221N
2d
2dN221
24
24
13
132
24
24
13
13
12
12
01
011
12
12
01
01s0
mmn
Nnl
nl
s
PkPkP
PK
PνPkPk
PK
PV
PK
PVP
PK
PV
PK
PV
PK
PV
PK
PVP
PK
PV
PK
PVMkP
MK
Mν
PK
KνM

VALEURS NUMERIQUES NOMINALES DES PARAMETRES DU MODELE
1.76.0 hMsν
longcycle.2oucourtcycle5.0,normalcycle6.1dν
Différentes valeurs de d = mutations,
Commande= ks (t), valeur nominale ks =0.78
1.65.0 hMmνM1lK 4n M5.0mK M2.0dK
19.1 h1k13.1 h2k
M21K M22K M23K M24K1.2.3 hM1V
1.58.1 hM2V1.5 hM3V
1.5.2 hM4V


ROBUSTESSE DU MODELE
• paramètres et commande du modèle >0, état initial>0 l’état reste positif à tout instant
• quelles que soient les valeurs >0 des paramètres, toujours la même structure d’équilibre:
Unique équilibre stable
Unique équilibre instable, entouré d’un cycle limite stable
Pas de point d’équilibre
(système explosif)

CONTRÔLE DU RYTHME PAR ks CONSTANT

CONTRÔLE DU RYTHME PAR ks CONSTANT
Manque d’efficacité
Manque de robustesse

PLANIFICATION DE TRAJECTOIRES
Fabriquer une trajectoire admissible ( x(t), u(t) ) du système , où 0 t T, qui raccorde l’état initial à l’état final.
État x0 ou cycle limite initialà t = 0
État finalxT à t=T),( uxfx

PLANIFICATION PAR PLATITUDE
Système dynamique plat = trajectoires paramétrées par une fonction y(t)et ses dérivées.
N221N
2d
2dN221
24
24
13
132
24
24
13
13
12
12
01
011
12
12
01
01s0
mmn
Nnl
nl
s
PkPkP
PK
PνPkPk
PK
PV
PK
PVP
PK
PV
PK
PV
PK
PV
PK
PVP
PK
PV
PK
PVMkP
MK
Mν
PK
KνM
Dans notre cas: y(t)=M(t)n
nl
mm
nls
N K
MKM
νM
KνP
1
N2N2 k
PkPP
),,( 211 dNPPfP
),( 2100 PPfP
),,,( 210 PPPMfks
M périodique toutes les variables périodiques, de même période

CONSTRUCTION DE LA COMMANDE ks POURLA MUTANTE A PERIODE COURTE
Md= M désiré (M obtenu sur le cycle normal, d=1.6), périodique de période 24H environ.
n
nl
mm
nls
N K
MdKMd
νdM
KνP
1
N2N2 k
PkPP,
)5.0,,(, 211 NPPfP ),(, 2100 PPfP
),,,( 210 PPPMfks
•loi ks périodique, mais qui passe (sur de courtes plages) par des valeurs négatives!
• on remplace ces valeurs négatives par de faibles valeurs positives:
Loi ks’ périodique, positive, proche de ks qui aboutit au résultat recherché.

COMMANDE ks POUR LA MUTANTE A PERIODE COURTE