MANAGEMENT DUN SYSTEME DINFORMATION DOCUMENTAIRE Par Madame Angoran O. L. Marie-Laure.

*
CONTRIBUTION A L’ETUDE D’UN SYSTEME DE
COMMUNICATION EMBARQUE DANS UN
MINIDRONE QUADRIROTOR
Présenté par :
RAVALITERA Nantenaina
01/EN/EA/2012 Soutenu le 10 Septembre 2013
UNIVERSITE D’ANTANANARIVO
ECOLE SUPERIEURE POLYTECHNIQUE
D’ANTANANARIVO
DEPARTEMENT ELECTRONIQUE
MEMOIRE DE FIN D’ETUDES EN VUE DE L’OBTENTION
DU DIPLOME D’INGENIEUR
Spécialité: ELECTRONIQUE AUTOMATIQUE


CONTRIBUTION A L’ETUDE D’UN SYSTEME DE
COMMUNICATION EMBARQUE DANS UN
MINIDRONE QUADRIROTOR
Présenté par :
RAVALITERA Nantenaina
Devant le jury composé de:
Monsieur RASTEFANO Elisée : Président du jury
Monsieur RANDRIAMAROSON RivoMahandrisoa : Examinateur
Monsieur RATSIMBA Mamy Nirina : Examinateur
Monsieur ANDRIAMANTSOA Guy Danielson : Examinateur
Le rapporteur :
Monsieur HERINANTENAINA Edmond Fils
Soutenu le 10 Septembre 2013
UNIVERSITE D’ANTANANARIVO
ECOLE SUPERIEURE POLYTECHNIQUE
D’ANTANANARIVO
DEPARTEMENT ELECTRONIQUE
MEMOIRE DE FIN D’ETUDES EN VUE DE L’OBTENTION
DU DIPLOME D’INGENIEUR EN ELECTRONIQUE
Spécialité: ELECTRONIQUE AUTOMATIQUE

i
REMERCIEMENTS
Tout d’abord, je remercie le bon Dieu qui m’a permis de réaliser ce travail, de
m’avoir donné la pleine santé et la force d’affronter toutes les difficultés rencontrées.
Ensuite, je tiens à remercier chaleureusement toutes les personnes telles que:
Monsieur RATSIMBA Mamy Nirina, Chef du Département Electronique.
Monsieur RASTEFANO Elysée qui a bien voulu présider le jury de cette soutenance
de mémoire de fin d’étude.
A Monsieur HERINANTENAINA Edmond Fils, mon encadreur, qui m’a toujours
dirigé avec grande souplesse et bons conseils le long de notre travail pour me permettre de
terminer en temps voulu l’élaboration de ce mémoire.
A tous les membres du jury pour avoir accepté d’examiner et pris le soin d’évaluer ce
travail malgré leurs obligations :
Monsieur RANDRIAMAROSON RivoMahandrisoa
Monsieur RATSIMBA Mamy Nirina
Monsieur ANDRIAMANANTSOA Guy Danielson
A tous les enseignants du Département Electronique, ainsi que les enseignants et
responsables de l’Ecole Supérieure Polytechnique qui ont assuré notre formation durant ces
cinq années d’études.
A mes parents et à ma famille pour leurs soutiens inconditionnels et leur amour ainsi
que toutes les personnes qui ont participé de près ou de loin jusqu’à aboutir à ce présent
mémoire de fin d’étude.
Nantenaina

ii
RESUME
Pour contrôler un drone, une simple radiocommande est suffisante. Mais les
fonctionnalités proposées par cette radiocommande étant limitées, de nouveaux systèmes sont
apparus. Une station mobile pour drone par exemple permet de visionner en temps réel
altitude, position, vitesse, température, niveau batterie, image… Le système de
communication doit donc être réadapté.
Dans ce mémoire, le quadrirotor conçu a été décrit comme un véhicule aérien ayant la
capacité de transmettre des données de vol, et de prendre les mesures nécessaires en cas
d’anomalies. Un module de communication a été mis en place pour les échanges avec la
station mobile.

iii
ABSTRACT
To control UAV, a remote control is sufficient. But the functionality provided by this
radio is limited, new systems have emerged. A mobile station for UAV example allows you to
view real-time altitude, position, speed, temperature, battery level ...The communication
system should be rehabilitated.
In this memory, designed quadrotor has been described as an air vehicle with the
ability to transmit data theft, and to take the necessary measures in case of anomalies. A
communication module has been set up for communication with the mobile station.

iv
TABLE DES MATIERES
REMERCIEMENTS ..................................................................................................................... i
RESUME .................................................................................................................................... ii
ABSTRACT .............................................................................................................................. iii
TABLE DES MATIERES ........................................................................................................ iv
LISTE DES ABREVIATIONS ................................................................................................. vi
LISTE DES FIGURES ............................................................................................................ viii
LISTE DES TABLEAUX ......................................................................................................... ix
INTRODUCTION ...................................................................................................................... 1
CHAPITRE I : LES EQUIPEMENTS EMBARQUES DANS UN MINIDRONE
QUADRIROTOR ....................................................................................................................... 2
I.1 – Equipements de navigation ............................................................................................ 2
I.1.1 – Centrale inertielle..................................................................................................... 2
I.1.2 – Localisation GPS ..................................................................................................... 4
I.1.3 – Détecteur d’obstacles ............................................................................................... 4
I.1.4 – Altitude .................................................................................................................... 6
I.2 – Système d’alimentation .................................................................................................. 7
I.3 – Système de propulsion ................................................................................................... 7
I.3.1 - Phase de démarrage .................................................................................................. 8
I.3.2 -Phase d’accélération .................................................................................................. 8
I.4 – Capteurs de surveillance ................................................................................................. 9
I.4.1 – Température ............................................................................................................. 9
I.4.2 – Tension .................................................................................................................. 10
I.4.3 – Vitesse moteur ....................................................................................................... 11
I.5 – Equipements de mission ............................................................................................... 12
I.5.1 – LaCaméra ............................................................................................................... 12

v
I.5.2 – Emetteur et récepteur embarqué ............................................................................ 13
CHAPITRE II : ANALYSE ET TRAITEMENT DES DONNEES EXPLOITEES ............... 16
II.1- Généralités .................................................................................................................... 16
II.2- Gestion du microcontrôleur central .............................................................................. 17
II.3 - Détection des obstacles ................................................................................................ 21
II.4 - Traitement des informations du capteur de température ............................................. 21
CHAPITRE III : ETUDE DU SYSTEME DE COMMUNICATION EMBARQUE............. 25
III.1 – DESCRIPTION DES ELEMENTS D’UNE CHAINE DE TRANSMISSION
NUMERIQUE ...................................................................................................................... 25
III.1.1 – Le module émetteur ............................................................................................ 25
III.1.2 – Le module récepteur............................................................................................ 28
III.2 – LES MODULATIONS RETENUES ........................................................................ 28
III.2.1 – Modulation OFDM ............................................................................................. 29
III.2.2 – Modèle OFDM de l’émetteur et du récepteur ..................................................... 30
III.3 – SIMULATION .......................................................................................................... 31
III.3.1 – Représentation du modèle sous Matlab\Simulink ............................................... 31
III.3.2 – Structure des blocs .............................................................................................. 33
III.3.3 – Bloc de configuration .......................................................................................... 34
III.3.4 – Résultat graphique............................................................................................... 35
CONCLUSION ........................................................................................................................ 36
ANNEXE 1 : Le moteurbrushless ............................................................................................ 37
ANNEXE 2 : Le microcontrôleur ............................................................................................ 38
ANNEXE 3 : Les points clé d’une modulation numérique ...................................................... 40

vi
LISTE DES ABREVIATIONS
ADC: Analog to Digital converter
ASK: Amplitude Shift Keying
BPSK: Binary phase-shift keying
BLDC: Brushless DC
CAN: Convertisseur Analogique Numérique
CNA: Convertisseur Numérique Analogique
CRC: Cyclic Redundancy Check
DS-SS: Direct Sequence Spread Spectrum
FFT: Fast Fourier Transform
FH-SS: Frequency-Hopping Spread Spectrum
FSK: Frequency Shift Keying
GFSK: Gaussian frequency-shift keying
GPS: Global Positioning System
GUI: Graphical User Interface
IDE: Integrated Development Environment
IEEE: Institute of Electrical and Electronics Engineers
IFFT: Inverse Fast Fourier Transform
LASER: Light Amplification by Stimulated Emission of Radiation
LiPo: Lithium Polymère
MSB: Most Signifiant Bit
NRZ: Non Return to Zero

vii
OFDM: Orthogonal Frequency Division Multiplexing
OSI: Open Systems Interconnection
PC: Personal Computer
PIC: Peripheral Interface Controller
PSK: Phase Shift Keying
PWM: Pulse with Modulation
QAM: Quadrature Amplitude Modulation
QPSK: Quadrature Phase-Shift Keying
RISC: Reduced Instruction Set Computer
ROS: Rapport d’onde stationnaire
RZ: Retour à Zero
SNR: Signal to Noise Ratio
TCAS: Traffic alert and Collision Avoidance System
TEB: Taux d’Erreur Binaire
UWB: Ultra Wide Band

viii
LISTE DES FIGURES
Figure 1.1 : Gyromètre vibrant .................................................................................................. 3
Figure 1.2 : Accéléromètre ......................................................................................................... 4
Figure 1.3 : Détection par infrarouge ........................................................................................ 5
Figure 1.4 : Oscillation du signal reçu ....................................................................................... 5
Figure 1.5 : Capteur barométriques ............................................................................................ 6
Figure 1.6 : configuration théorique du moteur ......................................................................... 8
Figure 1.7 :Montage du DS1820 .............................................................................................. 10
Figure 1.8 :Détecteur de niveau Batterie faible ........................................................................ 11
Figure 1.9: Fonctionnement caméra CCD ................................................................................ 13
Figure 1.10: Schéma du module émetteur ............................................................................... 13
Figure 1.11 : Schéma du module récepteur ............................................................................. 14
Figure 1.12 : Architecture générale du mini drone .................................................................. 14
Figure 2.1 : organigramme d’exécution du programme principal ........................................... 18
Figure 2.2 : Mouvements du drone .......................................................................................... 20
Figure 2.3 : Format des registes de température ...................................................................... 22
Figure 3.1 : Module Emetteur .................................................................................................. 26
Figure 3.2 : Module récepteur .................................................................................................. 28
Figure 3.3 : Symbole OFDM dans le domaine fréquentiel. ..................................................... 29
Figure 3.4 : Emetteur utilisant la technique OFDM ................................................................. 30
Figure 3.5 : Récepteur utilisant la technique OFDM ............................................................... 31
Figure 3.6 : Modélisation du bloc émetteur et récepteur de notre système .............................. 32
Figure 3.7 : Codeur convolutif ................................................................................................. 33
Figure 3.8 : Banque des modulateurs ....................................................................................... 34
Figure 3.9 : Résultat de la simulation ....................................................................................... 35
Figure A. 1 : Vue éclatée d’un moteur brushless ..................................................................... 38
Figure A. 2 : moteur Brushless de type LRK 9 pôles et 12 aimants ........................................ 38
Figure A. 3 : boitier du PIC18F4520 ........................................................................................ 39
Figure A. 4 : Architecture interne du 18F4520 ........................................................................ 40

ix
LISTE DES TABLEAUX
Tableau I : priorité des commandes à exécuter ........................................................................ 17
Tableau II : correspondance entre mouvement et actionneurs ................................................. 19
Tableau III : Plage de variation de la vitesse des moteurs. ...................................................... 20
Tableau IV : résultat de traitement du module IR .................................................................... 21
Tableau V : relation entre température et données ................................................................... 22
Tableau VI : Performances et inconvénients des modulations numériques ............................. 29

1
INTRODUCTION
Explorer le monde inconnu d’antan, ça fait partie de la nature humaine. De ce fait,
plusieurs inventions ont été mises au point par l’homme. Mais lorsque l’exploitation
s’effectue dans un milieu hostile, le risque d’y laisser la vie est trop élevé. Et l’homme
continu à inventer des machines pour aboutir à ses fins. Avec les avancées technologiques,
l’aéronef non habité ou UAV a vu le jour. Contrairement aux appareils volants qui nécessitent
la présence humaine à bord, l’UAV est téléguidé.
Pour mettre au point un tel système, plusieurs paramètres doivent être pris en
considération tant au sol que dans les airs, dont la communication. Quelque soit la mission
confiée au drone, il faut traiter les informations à transmettre et les ordres à exécuter.
Dans le présent mémoire intitulé « Contribution à l’étude d’un système de
communication embarqué dans un minidrone quadrirotor», nous allons essayer de
coordonner les actions des équipements embarqués pour accomplir une mission. Ce travail est
divisé en trois chapitres. Le premier chapitre est consacré à l’étude des équipements
embarqués. Ceux-ci assurent à la fois les mouvements, ainsi que la collecte des informations.
Le deuxième chapitre propose une certaine fonction d’assistance utilisateur. Elle permet au
drone de réagir plus vite que l’utilisateur en cas de danger imminent. Enfin, le troisième
chapitre est axé aux protocoles de communication avec la station au sol. Le système est étudié
dans le but que les données visualisées à la station comportent le moins d’erreur possible.

2
CHAPITRE I : LES EQUIPEMENTS EMBARQUES DANS UN
MINIDRONE QUADRIROTOR
Pour accomplir une mission, le drone embarque plusieurs équipements. Selon leur
spécificité, on peut grouper ces équipements en plusieurs éléments. Dans ce chapitre, nous
allons présenter ces différents groupements.
I.1 – Equipements de navigation
Chaque déplacement du quadrirotor nécessite d’être suivi. Ce premier groupe
d’équipements assure la stabilisation et la localisation afin d’anticiper tout risque.
I.1.1 – Centrale inertielle
La navigation inertielle repose sur l’utilisation des centrales inertielles. Il s’agit d’un
composant électronique de navigation de précision qui mesure l’accélération et la vitesse
angulaire à l’aide de gyromètres et d’accéléromètres. Grace à ces capteurs, la position et la
vitesse peuvent être déterminées à chaque instant. Les centrales inertielles sont souvent
composées de trois accéléromètres et trois gyromètres.
a – Gyromètre
Le gyromètre permet de déterminer les variations d'angle de rotation suivant un ou
plusieurs axes. Il est composé de capteurs détectant un effet gyroscopique. Il possède une
masse sismique correctement équilibré. Cette masse sismique possède deux degrés de liberté
en rotation. L'un des degrés de liberté sert à entretenir la rotation de la masse tandis que l'autre
sert à mesurer la vitesse angulaire.
Le gyromètre vibrant représenté sur la Fig 1.1 est composé d’un élément sensible
possédant la capacité de pouvoir osciller selon deux axes x et y. Lorsque l’élément sensible
est en vibration le long de l’axe x, et si le gyromètre est soumis à une de rotation autour de
l’axe z, une vibration apparaît le long de l’axe y. Cette vibration est excitée par la force de
Coriolis et son amplitude est proportionnelle à la rotation.

3
Figure 1. 1 : Gyromètre vibrant [1]
b – Accéléromètre
La mesure d'accélération d'un drone est réalisée par un accéléromètre à masse
suspendue. Cette masse sismique, subit dans son référentiel une accélération qui peut être
transposée au référentiel du drone. De ce fait, lors d'une accélération, la masse suspendue
subit, selon le type de détection, un déplacement ou une déformation. La mesure du
déplacement ou de la déformation permet de retrouver l'accélération.
La Fig1.2 représente un accéléromètre

4
Figure 1. 2 : Accéléromètre [2]
L’accéléromètre détermine une accélération sur un axe en G (9.806m.s-2
). Cette valeur
analogique est transformée en numérique par un CAN intégré au microcontrôleur.
I.1.2 – Localisation GPS
La fonction principale du module GPS est d‘assurer la stabilité du quadrirotor lorsque
celui-ci est éloigné du poste de commande. En effet, à 50 mètres d’altitude voire même à 100
mètres, le quadrirotor devient de plus en plus petit à l’œil, et donc la stabilisation devient un
atout essentiel pour le contrôle de celui-ci. La stabilisation s’améliore encore grâce au
récepteur GPS qui calcule la position dans l’espace et permet de ne pas dériver à cause du
vent.
L’exploitation de ce module a fait apparaître de nouvelles fonctionnalités
dernièrement. Pour les systèmes drones récents, un mode de pilotage automatique permet par
exemple de choisir le lieu de destination du quadrirotor. Sur la carte géographique de
l’interface du poste de commande, on peut juste indiquer le point vers lequel on veut que le
quadrirotor se déplace.
I.1.3 – Détecteur d’obstacles
La distance séparant le drone des obstacles peut être mesurée à l’aide d’un télémètre
ultrason, d’un télémètre infrarouge ou d’un télémètre laser. Mais pour une détection,

5
l’utilisation d’un simple capteur infrarouge suffit largement. Ce dernier est de plus avantageux
par rapport aux deux autres technologies du fait de sa faible consommation.
Le capteur mesure le retour ou le non-retour d’une lumière infrarouge. L’émission
d’IR modulée se fait sur chacun des quatre extrémités. Si le rayon revient au récepteur, cela
veut dire qu’un objet l’a renvoyé, sinon il n’y a rien. Les rayons sont réfléchis comme le
montre la Fig 1.3.
Figure 1. 3 : Détection par infrarouge [3]
La diode émettrice envoie des impulsions de fréquence 38KHz. Elle s’allume et
s’éteint à la fréquence demandée par le filtre du capteur en une période de 1
𝑓= 27µ𝑠, formant
ainsi une oscillation comme le montre la Fig 1.4. Grâce à cette oscillation, le filtre fait la
différence entre l’infrarouge de différentes sources de lumière et celle de l’émetteur. Lorsque
le récepteur détecte une oscillation, cela signifie donc que le rayon a été réfléchi par un objet
se trouvant devant le capteur.
Figure 1. 4 : Oscillation du signal reçu

6
Le récepteur utilise la fréquence 38KHz, l’émetteur doit donc aussi osciller à cette
fréquence. Pour cela, le microcontrôleur doit commander l’émission de la diode suivant la
période d’oscillation1
𝑓= 27µ𝑠. La led s’allume donc pendant 14μs puis s’éteint pendant
13μs.
I.1.4 – Altitude
Pour déterminer l’altitude, les altimètres barométriques sont largement utilisés sur les
avions. Ils dépendent de la variation des températures et des pressions et mesure l’altitude en
partant du principe que la pression atmosphérique baisse de 1hPa (1bar = 1000hPa) chaque
fois que l’on s’élève de 8metres. L’altitude est donc donnée par la formule :
Altitude = [Pmesurée – P0]×8
oùPmesurée est l’estimation de la pression donnée par le capteur et P0 la pression au niveau de la
mer (101325Pa).
Pour obtenir l’altitude par rapport au sol, il faut faire une mesure de la pression avant
chaque vol. P0 est ensuite remplacée par cette valeur. La formule devient :
Altitude = [Pmesurée – Psol]× 8
Le capteur de pression de la Fig 1.5 convertit la pression atmosphérique présente dans
l’environnement de 0 à 2bar en une tension continue variant entre O et 5V. Une propriété de
ce capteur est que la tension de sortie est proportionnelle à la pression mesurée :
U(V) = 0,0045×P – 51
Figure 1. 5 : Capteur barométriques [4]

7
I.2 – Système d’alimentation
Utilisée correctement, une batterie Lithium Polymère n’est pas plus dangereuse qu’une
autre batterie rechargeable. Les batteries de type « Lithium Polymère » ont une capacité
poids/puissance beaucoup plus intéressante comparée aux autres types de batteries. Pour la
même capacité, elles pèsent le tiers du poids d’un pack traditionnel. Toutefois les batteries
LiPo nécessitent des régimes de charge différents et il y a un risque d’incendie en cas de non-
respect des consignes.
Si une batterie Lithium Polymère subit un court-circuit ou une surcharge importante,
les éléments internes peuvent être endommagés. Le lithium étant très réactif au contact de
l’eau ou de l’humidité, si l’emballage de la batterie est défectueux, il peut se produire une
émission de gaz toxique et un incendie.
Si la batterie est manipulée avec soin et en respectant les consignes d’utilisation, il n’y
a aucune probabilité d’explosion ou de feux et la durée de vie est de l’ordre de 2 ans. Les
batteries Lithium Polymère ne doivent jamais être déchargées en dessous de 3 volts par
élément sous peine de les endommager. Si cela se produit, la charge suivante ne sera que
partielle et les éléments ne retrouveront pas leur capacité nominale ce qui entraînera une
réduction des performances.
D’autres batteries sont aussi disponibles : Lithium-phosphate (LiFePO4) dont la
tension nominale est d’environ 3.3V et le rapport énergie/masse est moins favorable que sur
les LiPo mais la durée de vie est supérieure.
I.3 – Système de propulsion
Les moteurs brushless sont les plus utilisés pour propulser des véhicules aériens de
type minidrone. Le défaut principal des moteurs à courant continu est la présence des balais
qui engendrent des frottements, des parasites et limitent la durée sa durée de vie par leur
usure. Pour éviter tous ces problèmes, on a recours au moteur Brushless [5].
Ils ont l’avantage d’avoir un bon rendement, supérieur à 70% pour les petits et 90%
pour les gros. L’absence de balais lui offre une durée plus longue par rapport aux moteurs
continus ordinaires.
Cependant, le fait que le moteur n’a pas de balais exige d’intercaler une carte
contrôleur entre l’accumulateur et les phases du moteur. La conception de ce circuit est très

8
complexe, elle génère une tension triphasée synchrone avec la rotation du rotor. Ce dispositif
est fiable mais plus onéreux que les variateurs de moteur classique.
On peut modéliser ce moteur vu sur la Fig 1.6 comme un moteur ayant un stator à 3
dents et 3 bobines connectées en étoile, et un rotor à 4 aimants permanent.
Figure 1.6 : configuration théorique du moteur
I.3.1 - Phase de démarrage
-On applique une tension entre deux pôles des bobines et le troisième en l’air. On attend que
le rotor vienne au repos, dite la position d’équilibre.
-On commute la tension d’une des bornes vers l’autre qui était en l’air, changeant la polarité
magnétique d’une dent et on attend la nouvelle position d’équilibre. On dit que le moteur a
tourné d’un pas.
-Et ainsi de suite, en commutant convenablement pour que la suite de pas engendre une
rotation dans le même sens. Les suites de pas sont caractérisées par les forces d’attraction et
de répulsion qui apparaissent au cours de la commutation pour faire tourner le rotor.
Dans ce mode de fonctionnement, le moteur ne peut pas tourner vite car il faut assurer
un temps minimum entre chaque commutation pour que le rotor finisse son mouvement. Cette
phase est surtout nécessaire pour démarrer le moteur afin de crée un courant par effet dynamo
qui sera ensuite capturé par un circuit combinatoire sur chaque phase.
I.3.2 -Phase d’accélération
Elle consiste à mesurer la tension induite présente sur la phase en l’air lorsque le
moteur aurait eu déjà assez de vitesse pour la produire. Après avoir lancé le moteur en mode
pas à pas, la carte contrôleur surveille la tension induite par effet dynamo aux bornes de la
phase en l’air et lorsque l’aimant cible se trouve entre les deux bobines qui le pousse et l’attire

9
en même temps, elle lance un nouveau cycle de commutation. A chaque moment de
l’évolution du rotor, les forces magnétiques sont toujours présents ce qui lui donne un couple
plus important. Les commutations suivent donc l’évolution du rotor ce qui permet une
accélération au moteur.
Ces moteurs assurent tous les mouvements du drone mais cela reste insuffisant. Il faut
que le drone puisse connaître ses environnements ainsi que son évolution dans l’espace par
l’intermédiaire des différents capteurs embarqués.
I.4 – Capteurs de surveillance
L’arrêt brusque du système de propulsion doit être évité. C’est pourquoi, le quadrirotor
doit être doté d’un ensemble de dispositifs surveillant en permanence l’état du système.
I.4.1 – Température
Le drone est équipé de thermomètres afin de surveiller chaque moteur, ainsi que la
batterie LiPo qui s’échauffe selon sa charge. Une valeur jugée trop élevée entraînera un
atterrissage programmé de l’appareil pour protéger la détérioration d’un des équipements.
Le capteur DS1820 est un capteur numérique qui permet la mesure de la température
sur une plage de -55° à +125°C avec un pas de 0.5°C. Sa configuration sur une carte
électronique est simple comme le montre la Fig 1.7
Figure 1.7 : Montage du DS1820 [6]

10
Ce capteur de température s’appuie sur le protocole « one-wire » pour communiquer
sa mesure. Comme son nom l’indique, un seul fil est nécessaire même si plusieurs
périphériques sont utilisés.
I.4.2 – Tension
Pour protéger l’ensemble du système du mini drone d’une chute de tension, un
détecteur de niveau de tension de la batterie est nécessaire afin d’arrêter le système. La
détection du passage en-dessous du seuil de 5V est réalisée en comparant une tension de
référence stabilisée (qui ne change pas même quand la tension de la batterie chute) avec la
tension de la batterie. La stabilisation de la tension de référence est obtenue par la diode zener
D1 de 3,6V, polarisée en inverse par la résistance R1. Le comparateur de tension, formé ici
par un simple AOP de type LM741, reçoit cette tension de référence sur sa borne non
inverseuse (broche 3). La tension non stabilisée provenant de la batterie est quant à elle
appliquée sur la borne inverseuse de l'AOP, au travers d'un pont diviseur composé de R2 et
R3, qui divise la tension d'entrée par deux. Quand la tension de la batterie vaut 5V, la tension
au point nodal de R2 et R3 est de 3,6V. Si la tension chute un tout petit peu en dessous de 5V,
la borne inverseuse de l'AOP se retrouve avec une tension inférieure à celle présente sur la
borne non-inverseuse, ce qui provoque le basculement de sa sortie de l'état bas à l'état haut.
Ainsi, le transistor Q3 sera à l’état ON, allume la LED et déclenche une interruption logicielle
dans le microcontrôleur central qui arrêtera l’ensemble du système. La Fig 1.8 nous montre le
montage de ce circuit.
Figure 1.8 : Détecteur de niveau Batterie faible [7]

11
Dans notre cas, il faut surtout s’assurer que chaque microcontrôleur soit alimenté par
une tension de 5V pour qu’ils fonctionnent correctement. En gardant les hypothèses
suivantes :
Vz = 3,6V, R2= 10kΩ, Seuil = 5V
On a la formule :
𝑆𝑒𝑢𝑖𝑙 =𝑉𝑧(𝑅2 + 𝑅3)
𝑅3
On en tire que : R3 = 25,7kΩ
I.4.3 – Vitesse moteur
Qui dit quadri-rotor, dit voilure tournante. Le contrôle du véhicule passe par des
variations de vitesse sur les 4 groupes motopropulseurs
- A l'équilibre : même poussée sur chaque rotor.
- Pour les autres mouvements tels que : roulis, tangage, lacet
La poussée des rotors ne dépend que de la vitesse de rotation sur les 4 groupes moto-
propulseurs. Ainsi les groupes moto-propulseurs sont primordiaux à dimensionner. On
considère la masse du véhicule à 1,6 kg donc un dimensionnement en vol stationnaire de
400 g / rotor (portance du disque rotor). Pour réaliser le quadri-rotor il faut deux hélices avec
pas à gauche et deux hélices avec pas à droite.
La formule suivante permet de calculer la vitesse de rotation de chaque rotor [8]
𝑇ℎ = 𝑅ℎ0𝐴𝑅𝑁𝑐2𝐶𝑧(𝛽)
6𝜋
Rh0 : la masse volumique de l’air
A : aire du disque rotor
R : rayon de la pale
c : Saumon
N = 2
: vitesse de rotation du rotor
Cz : coefficient de portance des pales

12
Pour des hélices de dimensions 10x4,5’’, le vol stationnaire serait alors équivalent à
une vitesse de rotation de 6000 tr/mn pour Cz = 0,1β et β = 7°
Pour faire voler donc le minidrone, il faut des moteurs qui tournent plus de 6000tr/mn
pour lui permettre d’effectuer différent mouvements correspondants au pilotage.
I.5 – Equipements de mission
La capture d’image est réalisée par une caméra vidéo, et l’image est transférée à la
station grâce à un transmetteur.
I.5.1 – La Caméra
Figure 1. 9 : Fonctionnement caméra CCD [9]
Une caméra CCD comme le montre la Fig 1.9comprend des lignes et des colonnes,
définissant les pixels. Le principe de lecture d'une CCD conduit à définir les bornes des
colonnes par un dopage p gravé dans le silicium. En revanche, les bornes des lignes sont
définies par une polarisation commandée. Le puits de potentiel qu'est un pixel est statique
dans la phase d'acquisition du signal scientifique, puis variable pendant la lecture des pixels.
Les étapes de l'enregistrement et de la lecture d'une image CCD sont décrites ci-jointe :
Durant la capture, les pixels se remplissent peu à peu en photo-électrons. .
La variation du potentiel définissant les lignes du CCD conduit au transfert, ligne par
ligne, vers le registre.

13
Le registre transfère les photoélectrons vers la zone de lecture, pour charger un
condensateur. La tension aux bornes du condensateur est ensuite amplifiée et
numérisée.
I.5.2 – Emetteur et récepteur embarqué
Ces modules sont destinés à transmettre ou recevoir des données venant du pilote.
L’émetteur qu’on a utilisé pour le minidrone est un module à implémenter au sein du reste du
système. Il s’agit d’un émetteur RF 3 canaux TLP434Aprésenté sur la Fig 1.10 avec son
circuit de base.
Figure 1.10 : Schéma du module émetteur [10]
Cette télécommande utilise un PIC12F509 de Microchip qui est un microcontrôleur 8
pins monopuce conçu pour les applications à faible nombre de broches. C’est un émetteur
sans fil ultra petit est idéal pour les projets de télécommande ou les transferts de données à
distance. Elle peut fonctionner avec une tension de 2V à 12V.
Le récepteur RF 3 canaux de type RLP434A qui est un récepteur radio compact
travaille directement avec l'émetteur TLP434A sur une fréquence de fonctionnement de. Le
module ainsi que le circuit correspondant est présenté sur la Fig 1.11 :

14
Figure 1. 11 : Schéma du module récepteur [10]
Il convient pour des débits de données allant jusqu'à 4.8KHz, et le courant typique
d'opération est seulement 4.5mA.
Connaissant tous les équipements embarqués, l’architecture générale du mini-drone
quadrirotor est représentée à la Fig 1.12. Selon cette figure, le gestionnaire des équipements
reçoit bien les ordres grâce au récepteur, mais il consulte d’abord les capteurs de surveillance
avant d’informer le système de propulsion.
Figure 1.12 : Architecture générale du mini drone

15
Dans ce chapitre, les divers composants du drone quadrirotoront été présentés. Il a été
constaté que l’utilisation des capteurs permet au calculateur embarqué d’exécuter ou non
l’ordre venant de l’utilisateur.
Ainsi, pour assurer le bon fonctionnement du système, l’analyse et le traitement des
données issues de ces capteurs seront l’objet du deuxième chapitre.

16
CHAPITRE II : ANALYSE ET TRAITEMENT DES DONNEES
EXPLOITEES
Les divers équipements mentionnés dans le chapitre I ne sont pas indépendants. Cela
implique toujours qu’il fonctionne par module mais leur vraie tâches ne se réalisent
qu’ensemble. Il est alors nécessaire de concevoir une carte mère où transitent tous les flux de
données entrant et sortant au système. Elle devrait savoir à quel moment effectuer une telle
opération avec un ordre de priorité bien définie.
II.1- Généralités
L’objectif est de concevoir un mini-drone quadrirotor pour des applications civiles. La
communication entre le drone et le poste de contrôle au sol est assurée par une liaison par
onde radio. Pour mener à bien une mission, le drone possède trois modes de pilotage qui se
basculent entre eux selon les circonstances.
- Le pilotage manuel :
Le drone traduit les commandes reçues depuis le poste de control et réagit comme attendu.
- Le pilotage semi-automatique :
Ce mode est enclenché lorsqu’un ou plusieurs capteurs qui surveillent l’environnement de
vol du drone détectent des obstacles. Le drone ne répond plus au pilotage manuel pendant une
courte durée, le temps de surmonter l’obstacle. Dans ce cas, un calculateur préprogrammé
donne les commandes pour les actions à entamer afin de dévier l’obstacle selon les données
qu’il a reçu. Il est donc impératif que ces données transitent rapidement avec une bonne
précision.
- Atterrissage forcé :
Celui-ci est activé quand une anomalie de fonctionnement est détectée sur l’un des
équipements embarqué tel qu’une surchauffe, la décharge des batteries. Ainsi, le drone par
l’intermédiaire d’un plan de vol préétabli effectue un atterrissage.

17
II.2- Gestion du microcontrôleur central
Le microcontrôleur qui est le centre de toutes décisions est le plus complexe dans le
système embarqué du drone. Chaque décision consiste à imposer un tour de chaque moteur
afin de mettre le drone dans un mouvement voulu. Il s’agit d’accélérer ou décélérer un
moteur. Nous allons d’abord voir comment le drone va agir sur chacun de ces quatre moteurs
pour se déplacer dans l’espace.
La mission principale du microcontrôleur centrale est de synchroniser les commandes
du pilote ainsi que les données des capteurs. Comme notre PIC est mono tâche, il faut donc
exécuter toutes les opérations en alternance suivant un ordre de priorité comme illustré sur le
tableau I. Les priorités se qualifient en quatre niveaux.
Tableau I : Priorité des commandes à exécuter
Périphériques Description Priorité
Capteur à infrarouge Détecteur d’obstacles 2
Centrale inertielle Contenant 3 gyroscopes sur les
trois axes pour la stabilisation 4
Commande manuelle Pilotage depuis la station au sol 3
Température embarquée Mesure pour le risque
d’échauffement 1
Niveau batterie Détection de niveau de batterie
faible 1
Cette priorité est importante pour organiser le traitement de données du drone. Le
programme utilisé, conçu en langage C doit suivre l’organigramme de la Fig 2.1 pour pouvoir
réaliser les contraintes attendues.

18
Figure 2.1 : Organigramme d’exécution du programme principal
Après le démarrage des moteurs, les diverses phases de test imbriqué l’un dans l’autre
s’exécute indéfiniment. Si le test est rejeté, la boucle passe au suivant, sinon elle actionne les
moteurs concernés pour corriger le mouvement du drone ou pour répondre aux commandes
reçues. C’est ainsi que le système fonctionne pour surveiller les opérations à exécuter par
l’intermédiaire des lectures de données venant des capteurs.
Nous considérons ici les notations A(Mi) et D(Mi) comme suivant :
A(Mi) : accélère le moteur Mi.

19
D(Mi) : décélère le moteur Mi.
i étant le numéro d’un moteur cible.
Notons aussi H(Mi) comme le maintient de la vitesse du moteur à sa dernière valeur.
Le tableau II ci-dessous résume le régime que doivent prendre les 4 moteurs selon chaque
type de mouvement.
Tableau II : correspondance entre mouvement et actionneurs
Mouvements Interprétation Moteur 1 Moteur 2 Moteur 3 Moteur 4
Gauche Roulis(-) D A H H
Droite Roulis(+) A D H H
Avant Tangage(-) H H A D
Arrière Tangage(+) H H D A
Rotation gauche Lacet(-) A A D D
Rotation droite Lacet(+) D D A A
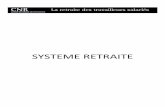
Le quadrirotor dispose de 4 mouvements pour se déplacer : le mouvement vertical, le
mouvement de roulis, le mouvement de tangage et le mouvement de lacet. Ces 4 possibilités
de mouvement sont illustrés sur la Fig 2.2.

20
Figure 2.2 : Mouvements du drone
Selon le calcul effectué au sein du microcontrôleur central, l’accélération d’un moteur
se fait par l’envoi de trois bit sur le contrôleur. Le codage est indiqué sur le tableau III. Une
combinaison sert à démarrer les moteurs, une autre pour démarrer la phase d’autopilotage. Les
six autres servent à varier la vitesse.
Tableau III : plage de variation de la vitesse des moteurs
Combinaisons Vitesse Moteur (rpm) Signification
000 0 Arrêt des moteurs
001 900 Démarrage de la phase
d’autopilotage du moteur
010 … 111 >900 La vitesse varie selon la
combinaison
Vertical Roulis
Tangage Lacet

21
II.3 - Détection des obstacles
Il suffit que chaque détecteur d’obstacles délivre une tension de sortie de 0V ou 5V
afin d’être considérée comme un niveau logique pour le port TOR du PIC. Le niveau de
tension 5V indique qu’il existe un obstacle détecté aux environs du capteur. Les résultats
obtenus servent également à stabiliser le drone.
Les détecteurs d’obstacles assurent la capacité d’autonomie décisionnelle au drone.
Quand l’un d’entre eux est activé, une commande intégrée au système qui sert à esquiver
l’obstacle est enclenché. Elle est prioritaire par rapport aux autres instructions de commandes.
La durée de cette phase dépend de la distance et de l’envergure de l’obstacle.
Tableau IV : résultat de traitement du module IR
Environnement Réaction du drone
Obstacle à gauche Lacet +
Obstacle à droite Lacet -
Obstacle avant Roulis -
Obstacle arrière Roulis +
II.4 - Traitement des informations du capteur de température
Le capteur de température DS1820 [6] s'appuie sur le protocole one-wire
pour communiquer sa mesure. En raison de la simplicité d’utilisation et du large
déploiement de ce capteur, les commandes pour le faire fonctionner et le contrôler ont
été implémentées dans la librairie « One_Wire ». Il y a au total 3 fonctions :
- Ow_Reset permet de reseter le capteur – OW_Reset
- Ow_Read permet la reception des données - OW_Read
- Ow_Write permet d’envoyer des commandes au capteur – OW_Write
Le protocole de communication One_Wire permet d’utiliser plusieurs capteurs sur un
même fil. Chaque capteur est alors identifié par un code sur 64-bits. Etant donné que nous
n’utilisons qu’un seul capteur de température ici, la procédure est ici simplifiée. Pour lire une
température et l’afficher, il faut suivre les étapes suivantes :

22
- Envoi de la commande CONVERT_T au capteur (mesure de la température)
- Envoi de la commande READ_SCRATCHPAD au capteur (placement de la
température dans le buffer du capteur)
- Lecture du buffer
- Affichage
Avant de transmettre les commandes CONVERT_T et READ_ SCRATCHPAD, il
faudra au préalable envoyer au capteur un pulse de reset (OW_Reset) puis la
commande SKIP ROM pour adresser tous les capteurs sans avoir recours au code ROM
d’indentification.
Décodage de la température
A la lecture, le code renvoyé par le capteur est un code binaire sur 16 bits
(les 8 premiers marquent le signe) :
Figure 2.3: Format des registres de température
Avant d’afficher la température, il est donc indispensable de décoder la suite binaire.
Pour cela, nous utilisons la relation donnée dans la datasheet du capteur :
Tableau V : Relation entre température et données
Température (°C) Sortie digitale (Binaire) Sortie digitale (Hexadécimale)
+85.0 0000 0000 1010 1010 00AAh
+25.0 0000 0000 0011 0010 0032h
.0.5 0000 0000 0000 0001 0001h
0.0 0000 0000 0000 0000 0000h
-0.5 1111 1111 1111 1111 FFFFh
-25.0 1111 1111 1100 1110 FFCEh
-55.0 1111 1111 1001 0010 FF92h
Après lecture du code binaire, la variable de lecture contient donc une suite de 16 bits.
Les 8 premiers (MSB) nous permettent de savoir si la température est positive ou négative. Si
elle est négative, il faudra déterminer le complément à 2 des 8 derniers bits (LSB). Ceci étant

23
fait, vous remarquerez que le dernier bit permet de déterminer la partie décimale. La
résolution étant de 0.5°C, s’il est égal à 1, alors le 10ème
de °C est égal à 5 et s’il est
égal à 0, alors le 10ème
de °C est égal à 0. Les 7 bits restants correspondent à la partie entière.

24
Dans ce chapitre, les mesures prises par le calculateur en fonction des données reçues
sont expliquées. Les alertes prioritaires proviennent essentiellement des équipements de
surveillance et des détecteurs d’obstacles, les autres informations sont à visualiser à la station
mobile.
Pour obtenir un bon résultat de visualisation, le modèle utilisé pour la liaison sera
choisi dans les normes de réseau sans fil. Le dernier chapitre sera consacré à l’étude de ce
système de communication.

25
CHAPITRE III : ETUDE DU SYSTEME DE COMMUNICATION
EMBARQUE
Actuellement, il existe plusieurs technologies de communication sans fil exploitables
par un système drone. Des deux côtés, les principes de fonctionnement sont similaires. Ce
sont les matériels utilisés qui les différencient.
Dans ce chapitre, nous allons décrire les principes de la transmission numérique
exploitée par notre système.
III.1 – DESCRIPTION DES ELEMENTS D’UNE CHAINE DE
TRANSMISSION NUMERIQUE
Dans tout système de communication, le transport des informations passe par plusieurs
étapes et suit des normes internationales structurées et évaluées. Le principe est souvent le
même, mais au fil du temps avec l’introduction et l’évolution des techniques de numérisation
de données, la communication numérique donne plus de fiabilité par rapport aux
communications analogiques. Le paragraphe suivant décrit la chaine de transmission de notre
système.
Une chaîne de transmission numérique véhicule l'information entre une source et
un destinataire en utilisant un support physique comme le câble, la fibre optique ou
encore, la propagation sur un canal radioélectrique ou canal aérien. Les signaux
transportés peuvent être soit directement d'origine numérique, comme dans les réseaux
de données, soit d'origine analogique (parole, image, etc.) mais convertis en numérique. La
tâche du système de transmission est d'acheminer l'information de la source vers le
destinataire avec le plus de fiabilité et un cout réduit possible
III.1.1 – Le module émetteur
La Fig3.1 nous montre la chaîne de communication côté émetteur.

26
Figure 3. 1 : Module Emetteur
a- Domaine numérique
Les éléments qui évoluent dans ce domaine sont :[12]
- la source qui émet un message numérique sous la forme d'une suite d'éléments
binaires 0,1 .
- le codeur qui supprime éventuellement des éléments binaires non
significatifs(numérisation et compression de données) dit codage source, ou au
contraire introduit de la redondance dans l'information en vue de la protéger contre le
bruit et les perturbations présentes sur le canal de transmission (codage, transcodage,
cryptage, brouillage) dite codage canal.
- le codage binaire ou modulation a pour rôle d'adapter le spectre du signal au canal (milieu
physique) sur lequel il sera émis. Il génère un signal discret à partir des données
numériques. Chaque élément Ck de ce signal appelé symbole, peut être réel ou complexe,
et est associé à un ou plusieurs bits issus de la source d'informations. Du coté récepteur le
bloc seuil de décision consiste à déterminer les bits correspondant aux symboles reçus.
Codeur
Codage
binaire Filtre
d’émission
Transposition
de fréquence Amplification
0,1
0,1
Ck ue(t) u(t)
Données numériques
à émettre
Domaine discret Domaine continu
Canal

27
b - Domaine Analogique
Dans ce domaine, il y a :
- le filtre d’émission et forme d’onde qui transforment les symboles Cken un signal continu
par interpolation. Les symboles sont cadencés par une horloge à la fréquence Fs, et une
forme d'ondeh t qui permet d'interpoler le signal discret. h(t) est une fonction non nulle
sur l’intervalle [0 ;Ts ]. Les expressions de ue t et h t sont données par :
ue t = Ckh t − kTs
∞
k=0
h t = 1 pour 0 ≤ t ≤ Ts
0 ailleurs
- La transposition de fréquence et l’amplification consiste à décaler la fréquence centralef0
du signal pour respecter les caractéristiques imposées par le canal afin de ne pas perturber
les communications sur les autres canaux radio, puis à l’amplifier selon le besoin. Pour le
module récepteur, l’amplificateur réalise une amplification à faible bruit.
c - Canal
Dans les systèmes de communication sans fils, l’information est transportée par une
onde électromagnétique qui se propage à travers le milieu physique ou aérien (milieu
extérieur pour notre système). Cette propagation est soumise aux perturbations qui risquent
de faire varier la puissance du signal mesurée. Parmi ces perturbations, on peut citer :
- l’affaiblissement ou évanouissement en distance qui est dû à la propagation en espace libre
de l’onde électromagnétique et s’explique par la dispersion de l’énergie transmise suivant
les trois dimensions spatiales.
- les effets de masquage qui est causé par la présence d’obstacle (bâtiment, forêt...) entre
l’émetteur et le récepteur. L’onde électromagnétique traverse ces obstacles, mais subit une
atténuation de puissance fonction de la nature du matériau traversé.
- les effets d’altérations causés par les diffractions, réflexions, diffusions ou
évanouissements multiples de l’onde de différents.

28
III.1.2 – Le module récepteur
Figure 3. 2 : Module récepteur
Cette figure illustre la chaîne de communication coté récepteur du minidrone. Le
filtre de réception est un filtre adapté à l'émetteur pour une réception optimale des symbolesCk
transmis. L’échantillonnage est requis pour retrouver les éléments binaires transmis.
Par la suite, on peut établir le système de transmission en se basant d’abord sur les
points clés d’une modulation numérique, les modulations retenues, le canal à étudier et une
application à la technique OFDM. Pour pouvoir transmettre les données, il faut moduler les
signaux.
III.2 – LES MODULATIONS RETENUES
La modulation choisie doit minimiser l’occupation spectrale pour un débit binaire
donné et la probabilité d’erreur selon la puissance. Ainsi nous avons retenues les modulations
suivantes :
- PSK: modulation par saut de phase à 2 états (BPSK) et à 4 états (QPSK),
- 16-QAM et 64-QAM: modulation d’amplitude en quadrature à 16 et à 64 états.
Le tableauVI résume leurs performances en fonction des caractéristiques citées
auparavant.
Décodeur Seuilde
décision
Filtre de
réception,
Échantillonnage
Canal
Transposition
de fréquence Amplification
ve(t) Ck 0,1
0,1
Données numériques
reçues v(t)
Domaine continu
Domaine discret

29
Tableau VI : Performances et inconvénients des modulations numériques.
III.2.1 – Modulation OFDM
Les modulations multiporteuses comme l'OFDM consistent à répartir les symboles à
transmettre sur un grand nombre de sous-porteuses à bas débit, comme illustré sur la Fig 3.3.
Chaque symbole occupe toute la bande passante disponible, la transmission se fait de façon
parallèle contrairement aux modulations monoporteuses.
Figure 3. 3 : Symbole OFDM dans le domaine fréquentiel.
Modulation
Nombre
d’états
M
Efficacité
Spectrale
E b / N0 pour
un TEB de
10-6
Avantages
Inconvénients
PSK
2 1 10.5
- Simple à réaliser
- TEB meilleur que
Limitée pour
M>8
4 2 10.5
8 3 13.8
QAM
4 2 10.5 - ƞ proportionnelle à M
- TEB meilleur que PSK
- Plus performant si M>8
Complexité de
réalisation si
M>16
16 4 14.3
64 6 20.5

30
III.2.2 – Modèle OFDM de l’émetteur et du récepteur
a. Emetteur
La séquence de bits est d'abord soumise à un codage de canal pour réduire la
probabilité d'erreur au récepteur due aux effets de canal. Ensuite les bits sont tracés aux
symboles de BPSK, QPSK, 16-QAM, 64-QAM.
La trame de symbole obtenue est convertie en format parallèle pour subir la
transformation IFFT. Ce bloc de données fréquentielles deviendra alors notre donnée
transporteur.
Pour finir, on reconvertie les données parallèles au format série et l’intervalle de garde
est ajoutée entre les symboles OFDM avec remplissage de l'extension cyclique du symbole.
La séquence résultante est convertie en un signal analogique et transmis en radiofréquence. Le
signal modulé résultant est ensuite transmis au récepteur à l'aide de l’antenne de transmission.
Voici donc représenté sur la Fig 3.4 l’émetteur.
Figure 3. 4 : Emetteur utilisant la technique OFDM
b. Récepteur
Au niveau récepteur, l’antenne reçoit le signal radiofréquence et passe par un CAN.
Après numérisation et filtrage, la fréquence de chaque signal sera synchronisée par
l’intermédiaire d’une transposition en fréquence.
L’intervalle de garde est retirée de chaque symbole OFDM, et la séquence est
convertie au format parallèle puis subit la transformation FFT (démodulation OFDM) pour
revenir vers le domaine fréquentiel.
Un bloc le reconvertie en une séquence de format série avant d’être démodulé en une
suite d’éléments binaires. L’estimation est l’étape qui permet de compenser les symboles
reçus affectés par le canal, ensuite on supprime les redondances introduites à l’émission pour
obtenir les données reçues. Et voici donc sur la Fig 3.5 le récepteur associé.

31
Figure 3. 5 : Récepteur utilisant la technique OFDM
III.3 – SIMULATION
III.3.1 – Représentation du modèle sous Matlab\Simulink
LaFig 3.6 représente le système sous Matlab :

32
Figure 3. 6 : Modélisation du bloc émetteur et récepteur de notre système

33
Ce modèle comprend tous les débits: 6, 9, 12, 18, 24, 36, 48, et 54 Mb/s. Elle illustre
également la modulation et le codage adaptatif au-dessus d'un canal à évanouissement par
trajets multiples dispersifs, par lequel la simulation change le débit dynamiquement. Elle
emploie un taux d’effacement de canal artificiellement élevé pour faire le changement de
débit plus rapide.
III.3.2 – Structure des blocs
La rangée supérieure des blocs contient les composants d'émetteur tandis que la
rangée inférieure contient les composants du récepteur. Chaque bloc accompli les taches
suivants:
- La génération des données aléatoires avec un débit binaire qui change pendant la
simulation, le débit variable est possible à l’aide d’un bloc source qui émet un signal
périodiquement pour une durée qui dépend du débit désiré.
- Le codage et modulation en utilisant un ou plusieurs arrangements suivant la norme,
ici pour la partie émettrice nous avons adopté un codage convolutif illustré par la Fig3.7.
Figure 3. 7 : Codeur convolutif
La banque des modulateurs de la Fig 3.8 est constitué par plusieurs sous blocs qui
réalisent le codage convolutif vue précédemment en utilisant des taux de code de 1/2, de 2/3,
et de 3/4 et les modulations BPSK, QPSK, 16-QAM, et 64-QAM.

34
Figure 3. 8 : Banque des modulateurs
La transmission en modulation OFDM utilise 52 sous porteuses, 4 pilotes, 64 points
FFT, et un préfixe cyclique de 16 échantillons pour l’intervalle de garde.
III.3.3 – Bloc de configuration
Un bloc de configuration appelé « Paramètres du modèle » permet de placer des
paramètres tels que la composition de chaque trame de la modulation OFDM.
Un paramètre d'intérêt particulier pour la modulation adaptative et du codage est le
paramètre de seuils de SNR. C'est un vecteur de 7 éléments qui indique comment la
simulation devrait choisir un débit basé sur l'évaluation de SNR.

35
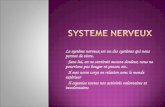
III.3.4 – Résultat graphique
Le bloc de visualisation du signal permet de voir :
- une partie des données binaires à émettre, les points d’égalisation reçue.
- le spectre de puissance de l'égalisation, en dB.
- l'évaluation du SNR, le débit binaire de la transmission et le taux d'erreurs sur les bits par
paquet.
La Fig 3.9, représente la simulation de l’envoie des données numériques
Figure 3.9 : Résultat de la simulation.
Comme informations à transmettre, nous allons considérer une suite numérique de 0 et
1 aléatoire.
En observant le résultat de la simulation, on constate que le rapport signal/bruit influe
sur le débit binaire : plus le rapport est élevé, plus le débit est important. On constate
également que sur le taux d’erreur par paquet c’est uniquement en présence d’un bruit
important qu’il y a quelques erreurs sur la transmission.
On aperçoit les constellations égalées et inégalées qui démontrent que la transmission
réalise ici la technique OFDM qui est représentée par les modulations : BPSK, QPSK,
16QAM et 64 QAM.

36
CONCLUSION
L’utilisation du drone par le grand public devient de plus en plus fréquente du fait
qu’il est très facile à piloter, et qu’il peut offrir diverses informations selon les besoins. Le
travail que nous avons réalisé dans ce mémoire révèle le fonctionnement interne du drone
quadrirotor.
Dans le premier chapitre, nous avons parlé des équipements dans le drone. Nous avons
étudié le système de propulsion qui crée le mouvement du drone, ainsi que les autres
dispositifs utiles à la mission.
Dans le deuxième chapitre, un ordre de priorité a été défini. Suivant cet ordre, le
microcontrôleur embarqué est chargé de traduire aux moteurs les réactions correspondantes.
Dans le troisième chapitre, nous avons développé un modèle pour la communication
avec la station au sol. Ce modèle réalise à la fois l’envoi des données de vol, et la réception
des signaux. La technique de modulation OFDM a été utilisée.
Même si la norme 802.11 connaît déjà un débit assez important pouvant aller jusqu’à
54 Mbits/s, ainsi qu’un taux d’erreur par paquet faible, la portée peut encore être améliorée.
Une solution possible est la norme 802.16 qui est utilisée pour les liaisons avec des distances
de plusieurs km.

37
ANNEXE 1 : Le moteur brushless
Un moteur Brushless comporte les mêmes éléments qu’un moteur à courant continu
excepté le collecteur et l’emplacement des bobines et des aimants permanents sont inversé. Le
rotor est composé d’un ou de plusieurs aimants permanent tandis que le stator de plusieurs
bobinages. La Fig A.1 nous montre la vue éclatée de ce type de moteur.
Figure A. 1 : Vue éclatée d’un moteur brushless
Le stator est un matériau magnétique à haute perméabilité souvent formé de 9 ou 12
dents. Les aimants sont collés sur la cloche externe pour former une alternance de pôle Nord
et Sud. Souvent 12 aimants pour 9 dents et 14 aimants pour 12 dents. La Fig A.2 nous donne
un exemple stator (à gauche) et rotor (à droite)
Figure A. 2 : Moteur Brushless de type LRK 9 pôles et 12 aimants

38
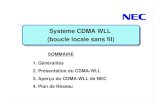
ANNEXE 2 : Le microcontrôleur
Le microcontrôleur 18F4520 est la partie centrale de notre carte mère. Toutes les
opérations entrantes ou sortantes de notre drone y passent toutes. Il interface les différents
éléments embarqués. Le critère de choix de notre microcontrôleur repose sur les différents
types de périphérique. Tout d’abord, les commandes de pilotage transitent dans le système du
drone par le biais du récepteur HF qui, après quelques opérations délivre des signaux PWM
au microcontrôleur.
Figure A. 3 : boitier du PIC18F4520

39
Figure A.4: Architecture interne du PIC18F4520

40
ANNEXE 3 : Les points clé d’une modulation numérique
Les principaux critères caractérisant une modulation numérique sont : le débit,le taux
d’erreur sur les bits, l’efficacité d’occupation spectrale, l’efficacité en puissance (Eb / N0).
a. Débit binaire
Le débit binaire D (bit/s) ou vitesse du canal est le nombre d’informations élémentaires
(ou bits) que ce canal transporte par unité de temps. Son expression est donnée par la relation:
D = 1
Tb
Tb : représente la durée du bit d’information, exprimée en seconde.
b. Taux d’erreur sur les bits
Les modulations numériques s’évaluent aussi grâce au taux d’erreur par bit (TEB). Il
permet de chiffrer l’influence du bruit pour chaque modulation et en fonction du nombre
d’états de la modulation. La relation qui définit le TEB est données par :
TEB = Nombre d′élement binaire faux
Nombre d′élement binaire vrai
i. L’efficacité spectrale, l’efficacité en puissance (Eb / N0), l’efficacité
spectrale
L’efficacité spectrale (en bit/s/Hz) d’un signal numérique est le nombre de bits par
seconde de données qui peuvent être supportés pour chaque Hertz de la bande de fréquence
utilisée (B en Hz) :
ƞ = Débit
Bande Occupée=
D bits/s
B Hertz
ii. L’efficacité en puissance (Eb / N0)
L’énergie par bit Eb
Eb(en Joules) décrit l’énergie par bits d’un système à M états et est en fonction de
l’énergie totale du système:
E b = E
log2 M
M représente le nombre d’état du système avec : M = 2n (nest le nombre de bits
correspondant à chaque symbole Ck).

41
Bruit N0
N0 (V2/Hz) est la densité spectrale d’un bruit blanc, dû à l’agitation thermique dans
les composants du système :
N0 = 4 kTR
R étant la résistance Ohmique du système.
T la température du matériau en °K.
k la constante de Boltzmann qui vaut 1.38.10-23
J/°K.
Le rapport signal sur bruit SNR
La puissance S est le rapport entre l’énergie totaleE et la durée d’un bit Tb, on obtient
la relation suivante pour le rapport signal sur bruit :
S
N= ƞ log2 M
Eb
N0
Cette relation montre que le rapport SNR dépend de l’efficacité spectrale et du nombre
d’états M du système. C’est pourquoi, pour comparer les différentes modulations numériques,
il vaut mieux s’intéresser à l’efficacité en puissance qui est une valeur indépendante du
procédé de modulation.
Pour obtenir une bonne transmission, la conception du système doit donc avoir un
meilleur débit, un TEB moindre pour les erreurs à la réception, une grande efficacité en
puissance incluant le rapport signal sur bruit.

42
REFERENCES
[1]: http://www.google.com/patents/EP1579176B1?cl=fr
[2]:http://sweetrandomscience.blogspot.com/2013/07/comment-les-telephones-portables-
et.html
[3]:http://lvps87-230-19-121.dedicated.hosteurope.de/mediawiki/index.php?title=Activité
_6:_Détecter_les_obstacles_avec_des_détecteurs_infrarouges
[4]:http://www.directindustry.fr/prod/keller/capteurs-pression-piezoresistifs-membranes-
ceramique-affleurants-13762-513691.html
[5]:http://electronics-diy.com/electronic_schematic.php?id=303
[7]: http://sonelec-musique.com
[8] « La propulsion électrique des modèles réduits d’avions et de planeurs », G. Brocard
[9]: http://benoit.dubois2.free.fr/Xbird/
[10]: http://fr.wikipedia.org/wiki/Capteur_photographique
[11]:http://electroschema.blogspot.com/2011/04/schema-recepteur-pour-lemetteur-rf-3.html
[12] : E531, Traitement Numérique du Signal, 5ème
année, Département Electronique, ESPA,
2011-2012

43
Auteur:
RAVALITERA Nantenaina
Titre :
Contribution à l’étude d’un système de communication embarqué dans un minidrone
quadrirotor
Nombre de pages: 56
Nombre de figures:28
Nombre de tableaux:6
Résumé :
Dans ce mémoire, le quadrirotor conçu a été décrit comme un véhicule aérien ayant la
capacité de transmettre des données de vol, et de prendre les mesures nécessaires en cas
d’anomalies. Un module de communication a été mis en place pour les échanges avec la
station mobile.
Mots-clés:
Quadrirotor, OFDM, Wi-fi, Moteur brushless, Microcontrôleur, Capteur
Abstract:
In this memory, designed quadrotor has been described as an air vehicle with the
ability to transmit data theft, and to take the necessary measures in case of anomalies. A
communication module has been set up for communication with the mobile station.
Keywords:
Quadrotor, OFDM, Wi-fi, BLDC, Microcontroller, Sensor
Encadreur:
Monsieur HERINANTENAINA Edmond Fils
Adresse :
Lot II R 194 Betongolo Antananarivo
Contact:
Tél : 034 68 287 08 E-mail: [email protected]