Contexte réglementaire et normatif - library.e.abb.com · (SRP/CS) des machines incluant la...
85
August 29, 2014 Sécurité machines Comment atteindre simplement les obligations des nouvelles normes et directives machines EN ISO 13849-1 ? © ABB Group | Slide 1
Transcript of Contexte réglementaire et normatif - library.e.abb.com · (SRP/CS) des machines incluant la...

August 29, 2014
Sécurité machines Comment atteindre simplement les obligations des nouvelles normes et directives machines EN ISO 13849-1 ?
© ABB Group | Slide 1

Contexte réglementaire et normatifDepuis juin 2006, une nouvelle directive machines 2006/42/CE a été publiée.
L’utilisation et le respect de la norme 13849-1 permet de concevoir une machine conforme à la nouvelle directive machine
© ABB Group August 29, 2014 | Slide 2

Directive Machines et Normes harmonisées
NF EN ISO 13849-1 (2008)
Sécurité des Machines - Parties des systèmes de commande relatives à la sécurité
Définit les exigences de sécurité et des conseils relatifs aux principes de conception et d’intégration des parties des systèmes de commandes relatifs à la sécurité (SRP/CS) des machines incluant la conception du logiciel
NF EN 62061 (2005)
Sécurité fonctionnelle des systèmes de commande électriques, électroniques et électroniques programmables relatifs à la sécurité
Définit un cadre spécifique au secteur des machines pour la sécurité fonctionnelle d’un système de commande électrique relatif à la sécurité (SRECS).
© ABB Group August 29, 2014 | Slide 3

Quelle norme utiliser?
© ABB Group August 29, 2014 | Slide 4

Evolution de la norme EN 954-1 vers la EN 13849-1
Reprise
des notions de catégories B,1, 2, 3, 4 de la norme EN 954-1
des notions de structures et de comportement sur défaut de la norme EN 954-1
Ajouts :
De critères de définition du niveau de sécurité PL a,b,c,d,e,
Du MTTFd
De prescriptions sur la couverture de diagnostic des défaillances dangereuses DC
Des défaillances de mode commun CCF
Des exigences sur l’aspect logiciel
© ABB Group August 29, 2014 | Slide 5

Démarche de la norme 13849-1
Identification des fonctions de sécurité
Analyse du risque
Obtention du PL requis
Définition des parties constitutives
Vérification du Pl atteint (Cat / MTTFd / DC / CCF)
© ABB Group August 29, 2014 | Slide 6
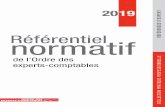
Analyse du risque
Paramètres de risque
S Gravité du dommage
S1 Blessure/dommage léger, généralement passager
S2 Blessure/dommage grave, dont le décès
F Fréquence et/ou temps d'exposition à la source de
risque
F1 Rarement et/ou temps d'exposition court
F2 Fréquemment à continuellement et/ou temps d'exposition
long
P Possibilité d'éviter ou limiter les dommages
P1 Possible sous certaines conditions
P2 Guère possible
La démarche est identique à la norme précédente
La notion de catégorie à été ici remplacée au profit du PL
© ABB Group August 29, 2014 | Slide 7

Constitution du PL
Le PL est une combinaison de:
La catégorie
Le temps moyen avant défaillance dangereuse MTTFd
La couverture de diagnostique DC
La catégorie n’à pas disparue, c’est un des éléments pris en compte pour déterminer le PL du système de commande
© ABB Group August 29, 2014 | Slide 8

Relation entre catégorie, et PL
© ABB Group August 29, 2014 | Slide 9
Catégorie
La catégorie définit l’architecture du système de commande relatif à la sécurité:
Catégorie B Il n'existe aucune couverture du diagnostic (DCavg = nulle) dans les systèmes de catégorie B et le MTTFd doit être au moins d’un indice faible à moyen. Dans de telles structures (normalement systèmes à canal unique), il n'est pas pertinent de prendre en considération les CCF.
Catégorie 1 Parties des systèmes de commande conçues et réalisées en utilisant des composants éprouvés et des principes de sécurité éprouvés.
Catégorie 2 Les parties des systèmes de commande relatives à la sécurité de doivent être conçues de façon à ce que leur(s) fonction(s) soi(en)t contrôlée(s) à intervalles convenables par le système de commande de la machine.
Catégorie 3 Les parties de systèmes de commande relatives à la sécurité de catégorie 3 doivent être conçues de façon à ce qu'un défaut unique sur l’une quelconque de ces parties ne mène pas à la perte de la fonction de sécurité.
Catégorie 4 Un défaut unique sur l’une quelconque de ces parties relatives à la sécurité ne mène pas à la perte de la ou des fonctions de sécurité il doit être détecté dès ou avant la prochaine sollicitation de la fonction de sécurité, par exemple immédiatement, à la mise en marche, à la fin d'un cycle opératoire de la machine. Si cette détection n'est pas possible, une accumulation de défauts ne doit pas mener à la perte de la fonction de sécurité.
© ABB Group August 29, 2014 | Slide 10

Catégorie
La catégorie définit l’architecture du système de commande relatif à la sécurité:
Catégorie B Il n'existe aucune couverture du diagnostic (DCavg = nulle) dans les systèmes de catégorie B et le MTTFd doit être au moins d’un indice faible à moyen. Dans de telles structures (normalement systèmes à canal unique), il n'est pas pertinent de prendre en considération les CCF.
Catégorie 1 Parties des systèmes de commande conçues et réalisées en utilisant des composants éprouvés et des principes de sécurité éprouvés.
Catégorie 2 Les parties des systèmes de commande relatives à la sécurité de doivent être conçues de façon à ce que leur(s) fonction(s) soi(en)t contrôlée(s) à intervalles convenables par le système de commande de la machine.
Catégorie 3 Les parties de systèmes de commande relatives à la sécurité de catégorie 3 doivent être conçues de façon à ce qu'un défaut unique sur l’une quelconque de ces parties ne mène pas à la perte de la fonction de sécurité.
Catégorie 4 Un défaut unique sur l’une quelconque de ces parties relatives à la sécurité ne mène pas à la perte de la ou des fonctions de sécurité il doit être détecté dès ou avant la prochaine sollicitation de la fonction de sécurité, par exemple immédiatement, à la mise en marche, à la fin d'un cycle opératoire de la machine. Si cette détection n'est pas possible, une accumulation de défauts ne doit pas mener à la perte de la fonction de sécurité.
© ABB Group August 29, 2014 | Slide 11

MTTFd
© ABB Group August 29, 2014 | Slide 12

MTTFd, le Nop
Nop = nombre de sollicitations de la fonction de sécurité / an
Exemple: La machine est utilisée 240 jours par an La fonction est sollicitée 14 heures par jour Le temps de cycle est de 3 minutes
La fonction de sécurité sera sollicitée 67 200 fois par an
© ABB Group August 29, 2014 | Slide 13

MTTFd, exemple de calcul
MTTFd = Durée de vie avant défaillance dangereuse / nombre moyen d’opération
Exemple pour un contacteur de puissance :
Durée de vie (valeur constructeur) = 600 000 cycles (B10d) (1)
Nop = 67 200
© ABB Group August 29, 2014 | Slide 14

MTTFd, exemple de calcul
© ABB Group August 29, 2014 | Slide 15

MTTFd, exemple de calcul
© ABB Group August 29, 2014 | Slide 16

MTTFd global avec deux canaux
© ABB Group August 29, 2014 | Slide 17

Diagnostic coverage “ DC”
Définitions :
Mesure de l‘efficacité du diagnostic qui est le ratio entre la probabilité de défauts détectés et la probabilité du nombre total de défauts
Exemple: vérification de l’etat du contacteur par une boucle de contrôle, contrôle de vraisemblance d’un capteur par redondance des contacts
© ABB Group August 29, 2014 | Slide 18

DC
© ABB Group August 29, 2014 | Slide 19

Méthode simplifiée
© ABB Group August 29, 2014 | Slide 20

Méthode simplifiée
© ABB Group August 29, 2014 | Slide 21

SISTEMA
SIStema (Sicherheit von Steuerungen an Maschinen)
Logiciel basé sur la norme EN ISO 13849-1 uniquement
Apparu en 2008 – actuellement version 1.1.4 en Allemand, Anglais, Français
Permet le calcul du niveau de performance (PL) à partir :
De rappels des tableaux normatifs,
Des conditions de sollicitations,
De bibliothèques fournisseurs,
Donne une valeur globale de PFH des différents éléments permettant d’utiliser des données provenant d’autres référentiels (EN 62061)
© ABB Group August 29, 2014 | Slide 22

SISTEMA
© ABB Group August 29, 2014 | Slide 23

Bibliothèque ABB pour SISTEMA
© ABB Group August 29, 2014 | Slide 24

Correspondance PL / SIL
© ABB Group August 29, 2014 | Slide 25

Programmation des Automates de sécurité
© ABB Group August 29, 2014 | Slide 26

Défaillance de mode commun CCF
Définitions :
Défauts de différents éléments, résultant d’un événement simple, alors que ces défauts sont sans conséquence l’un pour l’autre.
Pour déterminer les défauts de mode commun, il est nécessaire de :
considérer le circuit de commande dans son ensemble
s’interroger sur les mesures présentes pour les traiter
© ABB Group August 29, 2014 | Slide 27

CCF
© ABB Group August 29, 2014 | Slide 28

Quelles conséquences pour le choix de composants de sécurité?
La norme 954-1 définissait des catégorie de matériels, elle ne tenait pas compte de la fiabilité des composants, et excluait de fait des solutions ayant pourtant une très faible probabilité de panne.
La norme 13849-1 introduit des notions de fiabilité et définit des niveau de performance.
La nouvelle norme impose au constructeur de démontrer la pertinence de ses choix au regard de la dangerosité de la machine il lui faut documenter son dossier technique pour argumenter les solutions choisies
© ABB Group August 29, 2014 | Slide 29

Quelles conséquences pour le choix de composants de sécurité?
Choisir des composants PLe, permet d’atteindre facilement le niveau requis
Utiliser le logiciel SISTEMA permet d’établir rapidement un dossier technique solide
SISTEMA est un logiciel ouvert, et reconnu, utiliser un constructeur ayant mis à disposition une bibliothèque SISTEMA sécurise les résultats et fait gagner du temps
© ABB Group August 29, 2014 | Slide 30

Gamme de produits
Contrôle Modules de sécurités
Automates de sécurités
Relais de sécurité
Capteurs Capteurs sans contacts
Barrières immatérielles
Tapis de sécurités, …
Dispositifs de commande Bimanuelles
Poignées d’assentiment
ARU
Verrouillages de sécurité
Cartérisation Formations
© ABB Group August 29, 2014 | Slide 31

ABB produits de sécurité: votre partenaire en sécurité machine
Facile à utiliser
Innovants
Des solutions complètes
Esprit service
Formations
Aider les utilisateurs à atteindre le meilleur niveau de sécurité sans compromettre la productivité.

ABB produits de sécurité: Des produits innovants
© ABB Group August 29, 2014 | Slide 33

ABB produits de sécurité: Des produits innovants, au sein d’une gamme complète
© ABB Group August 29, 2014 | Slide 34

AppuisAppuis
Commandes bi manuelles: Safe Ball
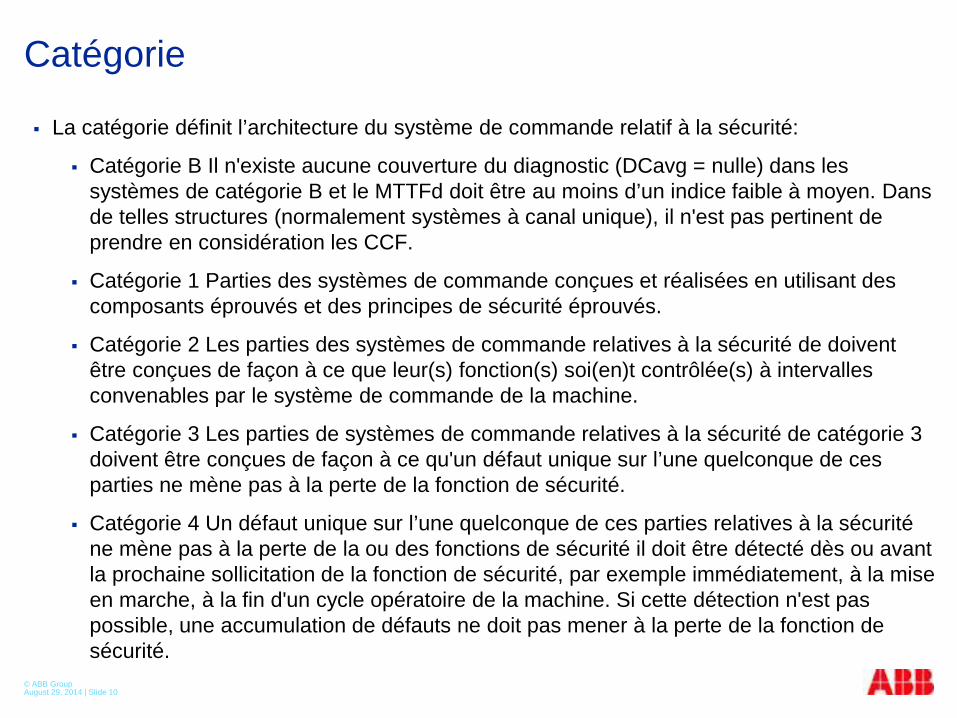
Innovant et d’utilisation facile:Le concept du signal dynamique Vital
Catégorie 4, PLe avec un seul canal (signal dynamique)
Jusqu’à 30 capteurs avec un seul module Vital
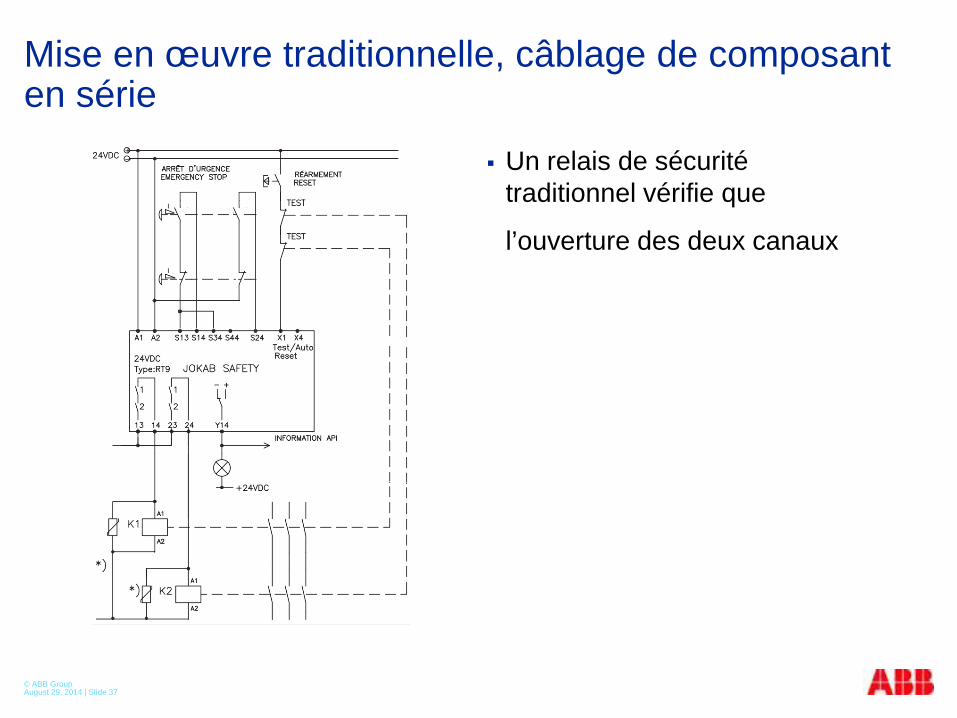
Mise en œuvre traditionnelle, câblage de composant en série
Un relais de sécurité traditionnel vérifie que
l’ouverture des deux canaux
© ABB Group August 29, 2014 | Slide 37

Mise en œuvre traditionnelle, câblage de composant en série
Un relais de sécurité traditionnel vérifie que
l’ouverture des deux canaux
est suivie de la fermeture des deux canaux
Le réarmement est alors possible
© ABB Group August 29, 2014 | Slide 38

Mise en œuvre traditionnelle, câblage de composant en série
En cas de court circuit d’un contact, dans le câble, amont aval
© ABB Group August 29, 2014 | Slide 39

Mise en œuvre traditionnelle, câblage de composant en série
En cas de court circuit d’un contact, dans le câble, amont aval
Ou bien avec un conducteur au même potentiel
© ABB Group August 29, 2014 | Slide 40

Mise en œuvre traditionnelle pour obtenir une sécurité Ple
Lorsque le capteur de sécurité est manœuvré l’autre contact s’ouvre, la machine s’arrête, le deuxième contact ayant interrompue le fonctionnement du relais de sécurité
© ABB Group August 29, 2014 | Slide 41
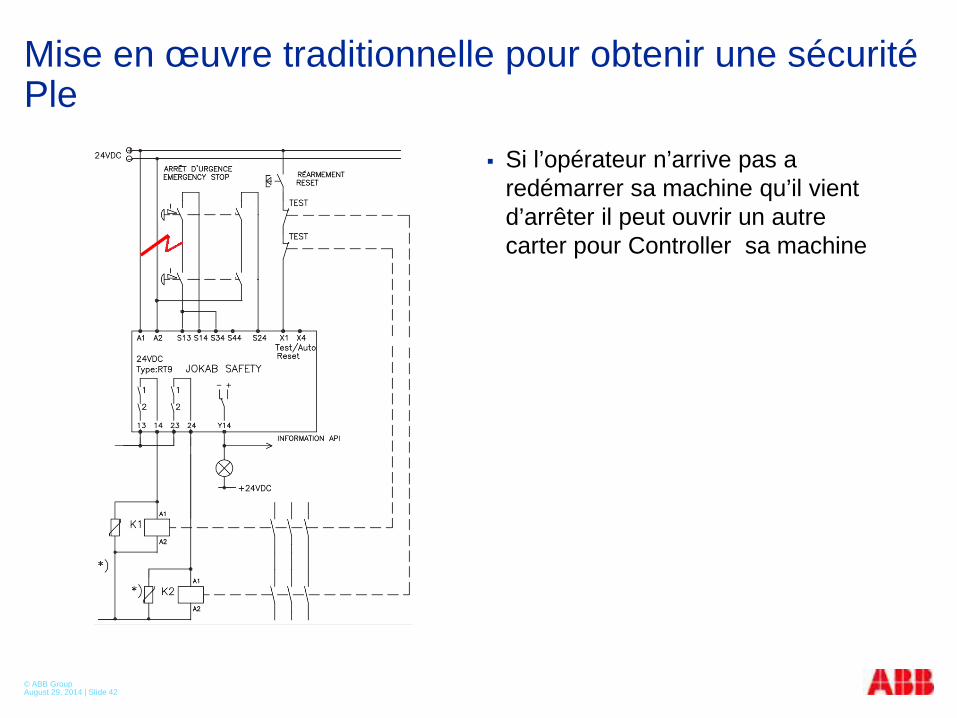
Mise en œuvre traditionnelle pour obtenir une sécurité Ple
Si l’opérateur n’arrive pas a redémarrer sa machine qu’il vient d’arrêter il peut ouvrir un autre carter pour Controller sa machine
© ABB Group August 29, 2014 | Slide 42

Mise en œuvre traditionnelle pour obtenir une sécurité catégorie 4
Le relais de sécurité a vu le premier canal s’ouvrir,
© ABB Group August 29, 2014 | Slide 43

Mise en œuvre traditionnelle pour obtenir une sécurité catégorie 4
Le relais de sécurité a vu le premier canal s’ouvrir, puis le deuxième
© ABB Group August 29, 2014 | Slide 44

Mise en œuvre traditionnelle pour obtenir une sécurité catégorie 4
Le relais de sécurité a vu le premier canal s’ouvrir, puis le deuxième
Pour le relais, si les deux canaux se referme, il autorise le redémarrage!
© ABB Group August 29, 2014 | Slide 45

Mise en œuvre traditionnelle pour obtenir une sécurité catégorie 4
En cas de court circuit d’un contact, si un autre appareil en série s’ouvre et ferme les deux canaux, le défaut n’est pas détecté
La norme ISO 14119 décrit ce phénomène sous le terme « masquage de défaut » et indique que le PL sera limité à PLd voir PLcselon le nombre de capteurs utilisé
© ABB Group August 29, 2014 | Slide 46

Mise en œuvre traditionnelle pour obtenir une sécurité catégorie 4
Avec une conception « double canal » pour obtenir le niveau maximal de sécurité il faut une conception avec:
Un relais de sécurité par fonction
La vérification de la fonction de sécurité se fait à chaque ouverture du circuit
© ABB Group August 29, 2014 | Slide 47

Innovant et d’utilisation facile: Le concept du signal dynamique pour obtenir le PLe
Le module de sécurité VITAL ou l’automate de sécurité PLUTO émet un signal carré
Chaque capteur qui reçoit ce signal l’inverse si il est fermé
Le retour du signal vers le module ou l’automate autorise le fonctionnement
© ABB Group August 29, 2014 | Slide 48

Innovant et d’utilisation facile: Le concept du signal dynamique
Avec le signal dynamique L’information est véhiculé par
deux fils
Les capteurs sont contrôlés 200 fois par secondes
Jusqu’à trente capteurs en série
La détection de TOUTE défaillance est immédiate
En double canal, beaucoup de défaillance ne sont détectable que lors de la manœuvre de l’appareil
© ABB Group August 29, 2014 | Slide 49

Le signal dynamique
Nombre impair de dispositifs : aucun shunt entre B1 et S1
Nombre pair de dispositifs : shunt entre B1 et S1
B1-S1

Produits utilisant le signal dynamique
Produits dédiés
Capteurs sans contact Eden
Verrouillage magnétique Magne
Verrou de sécurité Knox
Barrière mono faisceau spot
Arrêt d’urgence Smile
© ABB Group August 29, 2014 | Slide 51

Produits utilisant le signal dynamique
Produits classique
Adaptateurs Tina permet de transformer un signal double canal en signal dynamique
Interrupteurs classiques, matériels utilisant une technologie double canal traditionnelle
© ABB Group August 29, 2014 | Slide 52
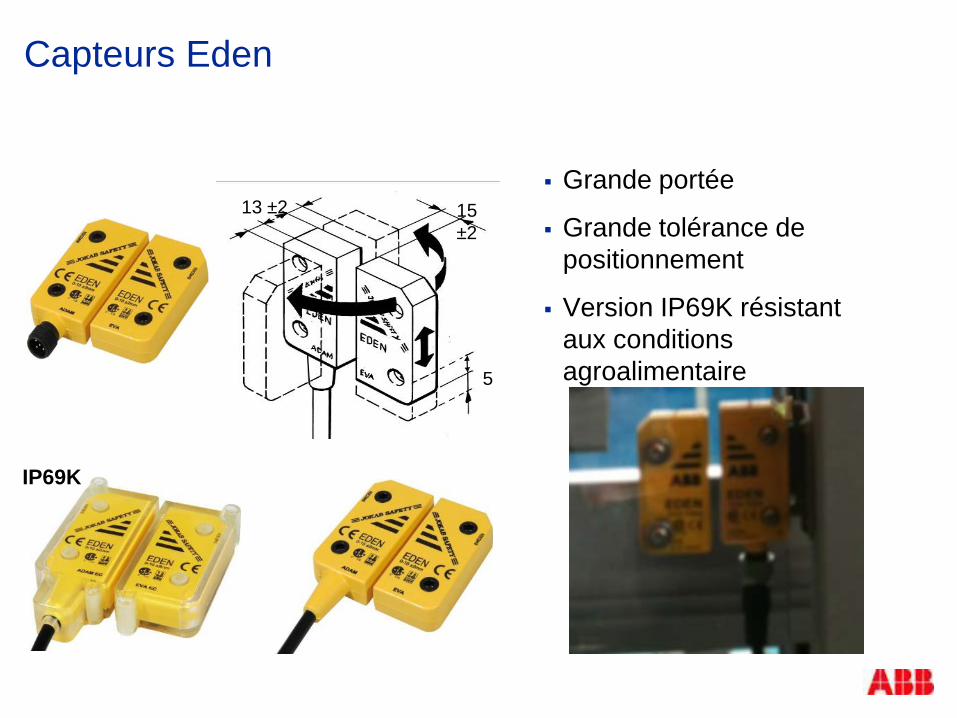
Capteurs Eden
Grande portée
Grande tolérance de positionnement
Version IP69K résistant aux conditions agroalimentaire
IP69K
5
15 ±2
13 ±2

Verrouillage de porte magnétique
Verrouillage électrique des portes et capots pour les applications de production sensibles aux interruptions involontaires
Pour la surveillance de la sécurité, Magne 2 possède un Eden intégré.
Grâce à son électroaimant, Magne maintient une porte fermée avec une force de retenue allant jusqu'à 1 500 N
© ABB Group August 29, 2014 | Slide 54

Verrou de sécurité Knox
Verrouillage de porte sécurise sur une machine avec forte inertie (long temps d'arrêt)
Empêche les interruptions involontaires de processus
Positions verrouillée et déverrouillée contrôlées : la position ne change pas en cas de coupure d'alimentation
Raccordement électrique uniquement sur la gâche
Conception robuste
© ABB Group August 29, 2014 | Slide 55

Monofaisceau de sécurité
Spot 35
Portée: 35m
IP67
Categorie 4
Spot 10
Portée: 10m
IP 67
Categorie 4
© ABB Group August 29, 2014 | Slide 56

Indication d’état
LED sur tout les composants:
Off: Non alimentéRouge: Sécurité actionnée: porte ouverte, A U enclenché…Rouge/Vert: Clignotant. Capteur ok, capteur amont déclenché.
vert: Capteur ok.

3 façons de connecter les dispositifs

Câble de chaque dispositif au coffret
EDEN EDEN
VITAL
EDEN
Terminals
Cabinet

Avec répartiteur

Avec connecteurs en T

Vital, un seul appareil pour sécuriser une zone
Un seul module Vital gère les barrières immatérielles
Les arrêts d’urgences
La détection de position du robot
La fermeture des cartérisations
© ABB Group August 29, 2014 | Slide 62

Automate de sécurité PLUTO
© ABB Group August 29, 2014 | Slide 63

Passerelle
Profibus /DeviceNet/CAN Open /Ethernet pour des informations d’automatisme
Bus Pluto
Signal dynamique
Double canaux
AS-i bus
PLUTO
Jusqu’à 10 capteurs en série par entrée
Chaque automate peut lire n’importe quelle entrée des autres automates

Automate de sécurité PLUTO
Les entrées IQ sont paramétrables en
Entrée de sécurité
Entrée pour signal dynamique
Générateur de signal dynamique
Sortie d’automatisme
Chaque sortie de sécurité est indépendante
Une seule sortie gère une fonction de sécurité
Avec le BT51 on dispose d’autant de contacts sec que nécessaire pour chaque sortie
On peux câbler deux contacteur derrière une sortie de sécurité (avec une boucle de contrôle)© ABB Group
August 29, 2014 | Slide 65

Bus PLUTO
Protocole propriétaire basé sur CAN
Jusqu’à 32 PLUTO
600 m de longueur
Avec des passerelle vers Profibus DP
DeviceNet
CANopen
Ethernet
© ABB Group August 29, 2014 | Slide 88

Pluto Manager
Logiciel gratuit
Certifié TÜV pour les fonctions de sécurité
Langage Ladder
Supervision On-line

Pluto Manager, tous maitre, pas de table d’échange
Tout les automates Pluto du projet peuvent lire les entrées des autres automates Pluto (y compris celles du réseau AS-I)
© ABB Group August 29, 2014 | Slide 90

PLUTO AS-i
Plusieurs réseau AS-I peuvent cohabiter sur le même réseau Pluto, on peux déporter les automates au plus prêt de chaque fonction de sécurité, plusieurs machines sur une même ligne peuvent utiliser le mêmes informations de sécurité

PLUTO AS-i
Un ou deux cables plats
Prise vampire
Auto cicatrisant Faible cout d’installation
Cablage minimal
Fexibilité maximale
Impossibilité de se tromper
• PLUTO en tant que maitre, moniteur de sécurité ou esclave
• Jusqu'à 100m, 500m avec répéteur• Catégorie 4

Produits AS-i
Nœuds AS-i, URAX, pour• Capteurs Dynamics• Appareils double
canaux• Barrières immatérielles• Bi manuelles
Réarmement ou non
LEDs
Produits directement intégrable au bus ASI:
• Poignée d’assentiment• Bi manuelle• Arrêt d’urgence• Eden

© ABB GroupAugust 29, 2014 | Slide 94
Large gamme de relais de sécurité, temporisés et d’extension
Contrôle et surveillance des organes de sécurité
1 ou 2 canaux Entrée de test pour la surveillance
des contacts externes Réarmement manuel ou
automatique Voyants d'état pour l’alimentation,
les entrées et sorties, le court-circuit et la sous-tension
Borniers débrochables
Solutions en technologie traditionnelle
Capteurs de sécurité(1NO+1NC)
Câbles(2 voies)
Relais de sécurité(E/S de sécurité)
2 sorties
Remonté d’information(Contacts aux.)

Flexibles et compacts
Un seul relais pour tous les dispositifs de sécurité
Borniers débrochables
Relais de sécurité RT

Barrières immatérielles Focus
En standard
Réarmement manuel surveillé ou automatique
Réarmement temporisé
Inhibition partielle ou complète
Masquage flottant ou fixe
Modèles avec inhibition
© ABB Group August 29, 2014 | Slide 96

1. Relachée intermédiare ou appuyée
2. Pour montage encastrée
3. Bouton optionnels
2.
3.
Poignée d’assentiment à trois positions

Bords et tapis sensible, pare-chocs
Deux surfaces conductrices, en cas de pression, un court circuit est créé

Arrêt d’urgence
Smile et Inca
Traditionel ou signal dynamique
Connecteurs M12
Status par LED
SmileInca
Arrêt d’urgence à câble

Cartérisation Quick-Guard

Quick-GuardLéger, souple, facile à assembler et à modifier
Profilés en aluminium
Pas de perçage, pas de soudure
Supports pré-monté avec vis de fixation et écrous
Support breveté,
Fixations disponibles pour la plupart de nos interrupteurs
Nombreux composants
Nombreuses matières (maille, PC, matériaux d’isolation phonique)

Quick-Guard - deuxversions
Quick-Guard Standard“sur mesure” cartérisation sur plan
Quick-Guard ExpressAdaptable sur site
SafeCad
Peuvent être mixés


© ABB Group August 29, 2014 | Slide 104


Vitrage et isolation phonique