Mode d'emploi batteur électrique PR021A Studio by Riviera et Bar
Université du Québec à Chicoutimi
MODULE D’INGÉNIERIE
GÉNIE DE L’ALUMINIUM
PROJET
Rapport final
CONCEPTION D’UN GÉNÉRATEUR D’EMBRUN MARIN
Préparé par
ALLARD JONATHAN
DION LUKAS
FILLION ERIC
Pour
JEAN PERRON, Ph.D.
LIMA
22 avril 2011
CONSEILLER : Guy Fortin, ing, PH.D.
COORDONNATEUR : Jacques Paradis, ing
Approbation du rapport d’étape pour diffusion
Nom du conseiller
Date
Signature
Résumé de projet
Le promoteur du projet, M. Jean Perron désirait la création d’un prototype permettant la
génération d’un embrun marin. Ce prototype permettra au LIMA de simuler le givrage que
subissent les plateformes pétrolières qui doivent s’ériger de plus en plus au nord afin d’exploiter
de nouvelles sources de pétrole. Le scénario choisi consiste donc à générer une vague et de
souffler la crête de celle-ci pour générer l’embrun. L’objectif du projet est de livrer au LIMA, un
prototype fonctionnel permettant de reproduire un embrun similaire à celui en retrouvé en haute
mer. Les conditions à respecter sont nombreuses telles que le diamètre des gouttelettes, la
stabilité du système, la température d’utilisation et les risques de corrosion.
Suite à une recherche bibliographique exhaustive sur le web, la littérature et les brevets, il a
été possible de comparer plusieurs principes permettant la génération de vagues. Le choix du
générateur de vague s’est porté sur un système divisé en deux composantes. Le bassin est la
première composante. Afin de conserver un système fermé, la vague est générée dans un bassin,
qui est situé à même un bassin de dimension supérieur pour permettre le retour de l’eau à son
origine. La deuxième composante est un bras à volets alimenté par un vérin pneumatique et qui
exerce une poussée longitudinale sur toute l’aire du bassin intérieur. En dernier lieu, la soufflerie
devait être conçue à partir d’un ventilateur fourni par le LIMA. Ainsi, le conduit de ventilation
ainsi que le mode de fixation sont devenus les parties prenantes de cette phase. Pour effectuer la
conception du prototype, l’utilisation de calculs théoriques relatifs à la mécanique des fluides a
été principalement utilisée pour dimensionner le bassin et la soufflerie. L’utilisation du logiciel
Solidworks a permis de dimensionner rapidement les assemblages mécaniques tout en prenant
soin de valider les résultats. Une fois le montage complété, des essais ont été réalisés afin de
caractériser principalement la hauteur et la vitesse des vagues, la vitesse du vent, ainsi que la
grosseur des gouttelettes générées.
Les essais réalisés avec de l’eau douce à température pièce ont permis de conclure que le
prototype réalisé satisfait adéquatement l’objectif principal pour lequel il a été conçu. Cependant,
une liste de recommandations a été émise pour s’assurer que celui-ci sera apte à être opéré dans
les conditions prévues qui n’ont pu être testées pour différentes raisons dont le déménagement du
LIMA.
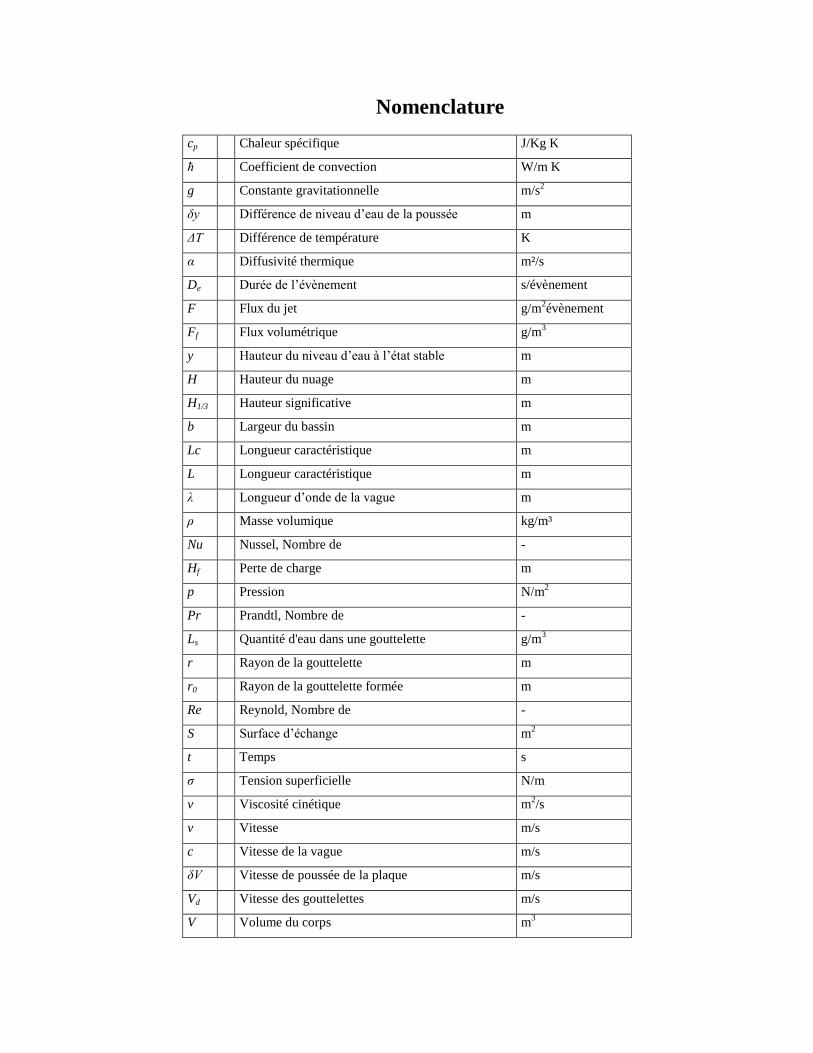
Nomenclature
cp : Chaleur spécifique J/Kg K
ћ : Coefficient de convection W/m K
g : Constante gravitationnelle m/s2
δy : Différence de niveau d’eau de la poussée m
ΔT : Différence de température K
α : Diffusivité thermique m²/s
De : Durée de l’évènement s/évènement
F : Flux du jet g/m2évènement
Ff : Flux volumétrique g/m3
y : Hauteur du niveau d’eau à l’état stable m
H : Hauteur du nuage m
H1/3 : Hauteur significative m
b : Largeur du bassin m
Lc : Longueur caractéristique m
L : Longueur caractéristique m
λ : Longueur d’onde de la vague m
ρ : Masse volumique kg/m³
Nu : Nussel, Nombre de -
Hf : Perte de charge m
p : Pression N/m2
Pr Prandtl, Nombre de -
Ls : Quantité d'eau dans une gouttelette g/m3
r : Rayon de la gouttelette m
r0 : Rayon de la gouttelette formée m
Re Reynold, Nombre de -
S : Surface d’échange m2
t : Temps s
σ : Tension superficielle N/m
v : Viscosité cinétique m2/s
v : Vitesse m/s
c : Vitesse de la vague m/s
δV : Vitesse de poussée de la plaque m/s
Vd : Vitesse des gouttelettes m/s
V : Volume du corps m3
Table des matières
Résumé de projet .............................................................................................................................. 2
Nomenclature ................................................................................................................................... 3
1 Introduction ............................................................................................................................ 11
1.1 Contexte ........................................................................................................................... 11
1.2 Problématique .................................................................................................................. 11
1.3 Objectifs........................................................................................................................... 12
1.3.1 Objectif principal ...................................................................................................... 12
1.3.2 Objectifs spécifiques ................................................................................................ 12
1.4 Méthodologie utilisée ...................................................................................................... 13
2 Recherche bibliographique ..................................................................................................... 13
2.1 Paramètres généraux ........................................................................................................ 13
2.2 Conditions réelles ............................................................................................................ 14
2.3 Les types de générateurs de vagues ................................................................................. 14
3 Choix du procédé ................................................................................................................... 14
3.1 Choix du générateur ......................................................................................................... 14
3.2 Principe de fonctionnement ............................................................................................. 16
3.2.1 Bassin ....................................................................................................................... 16
3.2.2 Plaque à volets .......................................................................................................... 16
4 Caractérisation des vagues ..................................................................................................... 17
4.1 Forme et volume d’une vague ......................................................................................... 17
4.2 Calcul pour la hauteur de la vague .................................................................................. 18
4.3 État de la vague après génération .................................................................................... 19
5 Éléments de conception .......................................................................................................... 23
5.1 Conception du bassin principal ........................................................................................ 23
5.1.1 Fond amovible .......................................................................................................... 23
5.1.1.1 Niveau amovible ............................................................................................... 24
5.1.2 Assemblage .............................................................................................................. 24
5.2 Conception du bassin stabilisateur .................................................................................. 26
5.2.1 Modification apportée au bassin stabilisateur .......................................................... 27
5.2.2 Bride ......................................................................................................................... 27
5.3 Support pour le montage.................................................................................................. 28
5.4 Procédure d’assemblage ................................................................................................. 29
5.5 Conception du générateur de vague ................................................................................. 31
5.5.1 Volets ....................................................................................................................... 31
5.5.1.1 Forces sur les volets .......................................................................................... 31
5.5.1.2 Épaisseur des volets .......................................................................................... 32
5.5.1.3 Pentures des volets ............................................................................................ 33
5.5.2 Dimensionnement des profilés du bras .................................................................... 34
5.5.2.1 Résistance en fatigue ......................................................................................... 36
5.5.3 Système de glissière ................................................................................................. 36
5.5.4 Vérin ......................................................................................................................... 37
5.5.4.1 Dimensionnement du vérin ............................................................................... 37
5.5.4.2 Dimensionnement du support du vérin ............................................................. 37
5.5.4.3 Système pneumatique ....................................................................................... 37
5.5.4.4 Schéma électrique ............................................................................................. 39
5.6 Conception de la soufflerie .............................................................................................. 40
5.6.1 Conduit de ventilation .............................................................................................. 40
6 Prototype ................................................................................................................................ 42
6.1 Dépenses .......................................................................................................................... 42
6.2 Montage réalisé ................................................................................................................ 43
6.3 Optimisation du prototype ............................................................................................... 44
6.3.1 Structure ................................................................................................................... 44
6.3.2 Vitesse d’entrée et de sortie du vérin ....................................................................... 46
6.3.3 Course du vérin ........................................................................................................ 48
6.3.4 Hauteur du fond amovible ........................................................................................ 48
6.3.5 Hauteur de la soufflerie ............................................................................................ 50
6.3.6 Résumé des paramètres optimaux retenus ............................................................... 51
7 Essais, résultats et analyse ...................................................................................................... 52
7.1 Vagues générées .............................................................................................................. 52
7.2 Vitesse du vent atteinte .................................................................................................... 53
7.3 Diamètre des gouttelettes obtenues ................................................................................. 55
8 Respect de l’échéancier .......................................................................................................... 58
9 Conclusion .............................................................................................................................. 58
10 Recommandations .................................................................................................................. 59
11 Annexe A ................................................................................................................................ 60
11.1 Température de congélation en fonction de la salinité de l’eau ................................... 60
11.2 Temps de refroidissement de la masse d’eau ............................................................... 61
11.2.1 Calcul de l’énergie totale à dissiper dans le volume d’eau ...................................... 62
11.2.2 Calcul de l’extraction d’énergie provenant de la conduction ................................... 63
11.2.3 Calcul de l’extraction d’énergie provenant de la convection ................................... 64
11.2.4 Temps de refroidissement de l’eau ........................................................................... 64
11.3 Conditions réelles ......................................................................................................... 65
11.4 Types de générateur de vagues .................................................................................... 66
11.4.1 Système par réservoir d’air sous l’eau ..................................................................... 66
11.4.2 Système batteur de houle .......................................................................................... 67
11.4.3 Masse qui monte et qui descend au milieu du bassin ............................................... 68
11.4.4 Batterie de ventilateurs ............................................................................................. 69
11.4.5 Système d’une vague continue ................................................................................. 70
11.4.6 Générateur par piston ............................................................................................... 71
11.4.7 Générateur vague de surf .......................................................................................... 72
11.4.8 Générateur par mouvement horizontal d’une plaque à volet ................................... 73
12 Annexe B ................................................................................................................................ 74
12.1 Bride ............................................................................................................................. 74
12.1.1 Calcul des forces sur les parois ................................................................................ 74
12.1.2 Calcul de la surface sur lesquelles la pression d’eau est exercée ............................. 74
12.1.3 Calcul du préserrage des boulons ............................................................................. 74
12.2 Force sur les volets ....................................................................................................... 75
12.2.1 Pression hydrostatique de l’eau au fond du bassin ................................................... 75
12.2.2 Résistance de l’eau lors du déplacement de la plaque à volet .................................. 77
12.2.3 Calcul de la force de traînée ..................................................................................... 79
12.3 Calcul de singularité .................................................................................................... 81
12.4 Dimensionnement du vérin .......................................................................................... 82
12.4.1 Calcul de la force à pousser ...................................................................................... 82
12.5 Risques du basculement ............................................................................................... 82
12.6 Caractéristiques du ventilateur ..................................................................................... 86
13 Annexe C ................................................................................................................................ 87
13.1 Dépenses ...................................................................................................................... 87
14 Référence ................................................................................................................................ 89

Liste des figures
Figure 1 Mouvement de l'eau dans les bassins ............................................................................... 16
Figure 2 : Mouvement de la plaque à volets .................................................................................. 17
Figure 3: Schéma d’une vague ....................................................................................................... 17
Figure 4 (a) Production d’une vague dans un repère stationnaire. (b) Vague observée dans un
repère qui se déplace avec la vague ............................................................................................... 18
Figure 5 : État d’une vague pendant son déplacement ................................................................... 19
Figure 6 Distance des composantes du bassin ............................................................................... 21
Figure 7 État du fond du bassin ...................................................................................................... 23
Figure 8 Illustration du niveau amovible ....................................................................................... 24
Figure 9 Vue du bassin principal (1 paroi manquante) .................................................................. 25
Figure 10 Bassin stabilisateur (1 paroi manquante) ....................................................................... 26
Figure 11 Vue de dessus, assemblage complet .............................................................................. 30
Figure 12 Vue isométrique, assemblage complet. .......................................................................... 30
Figure 13 Vue latérale du schéma du système de forces des trois volets ....................................... 31
Figure 14 Étude de la déformation maximale du volet .................................................................. 33
Figure 15 Contrainte d’un profilé carré d’acier standard 1’’X 1’’ d’épaisseur de 0.120’’ ............ 35
Figure 16 Déformation, profilé carré d’acier standard 1’’X 1’’ d’épaisseur de 0.120’’ ................ 35
Figure 17 : Courbe de Wöhler d’un acier standard ........................................................................ 36
Figure 18 : Schéma du système pneumatique du générateur de vagues ........................................ 38
Figure 19 : Schéma électrique du générateur de vagues ................................................................ 39
Figure 20 Options envisagées pour le raccordement des conduits ................................................. 40
Figure 21 Forme et angle du conduit de ventilation ....................................................................... 41
Figure 22 : Prototype du générateur d’embrun marin .................................................................... 43
Figure 23 et Figure 24 : Mesure de la hauteur de vague ................................................................ 47
Figure 25 Paramètres optimaux du vérin ....................................................................................... 51
Figure 26 : Exemple de mesure de hauteur de vague ..................................................................... 52
Figure 27 Points de référence à la sortie de la ventilation ............................................................. 53
Figure 28 Écoulement de l'air à la sortie du tunnel ........................................................................ 54
Figure 29 : Photos prises lors de la détermination du diamètre des gouttelettes ........................... 56
Figure 30 : Distribution des gouttelettes ........................................................................................ 57
Figure A. 31 : Graphique du point de solidification de l’eau salée ................................................ 60
Figure 32: flux volumétrique en fonction du rayon de la gouttelette formée ................................ 65
Figure 33: Système par réservoir d’air ........................................................................................... 66
Figure 34: Système batteur de houle .............................................................................................. 67
Figure 36: Boule au milieu ............................................................................................................. 68
Figure 37: Fond oscillant ................................................................................................................ 68
Figure 38: Batterie de ventilateurs ................................................................................................. 69
Figure 39: Vague continue ............................................................................................................ 70
Figure 41: Générateur par piston .................................................................................................... 71
Figure 42: Générateur par piston .................................................................................................... 72
Figure 43: Générateur par mouvement horizontal d’une plaque à volet ........................................ 73
Figure 44 Plan de la bride dessinée sur SolidWorks ...................................................................... 75
Figure 45 Représentation de la force hydrostatique sur la plaque ................................................. 76
Figure 46 : Diagramme des corps libres pour le calcul de la flèche du bras. ................................. 81
Figure 47 : Schéma de la position des centres de masse, cas 1. ..................................................... 82
Figure 48 : Dimension de la section M1 ........................................................................................ 83
Figure 49 : Dimension de la région M2 ......................................................................................... 83
Figure 50 : Diagramme des corps libres, cas 1. ............................................................................. 84
Figure 51 : Diagramme des corps libre, cas 2 ................................................................................ 85
Liste des tableaux
Tableau 1 Grille de sélection du générateur de vague ................................................................... 15
Tableau 2 Résultats obtenu à partir du tableur Excel ..................................................................... 22
Tableau 3 Le nombre de Reynolds à l’entrée ................................................................................. 41
Tableau 4 Tableau des pertes de charges et de pression dans le conduit ....................................... 42
Tableau 5 : Liste des composantes du générateur d’embrun marin ............................................... 44
Tableau 6 Hauteur des vagues ........................................................................................................ 46
Tableau 7 : Vitesse et hauteur de vague dans le bassin .................................................................. 53
Tableau 8 Vitesse du vent obtenu selon les positions .................................................................... 54
Tableau 9 Pression hydrostatique et force équivalente à certains endroits sur l’assemblage des
plaques à volets .............................................................................................................................. 77
Tableau 10 Force pour le déplacement de l’eau ............................................................................. 78
Tableau 11 Force de traînée ........................................................................................................... 79
Tableau 12 : Résumé des forces appliquées dans le cas 2 ............................................................. 85
Tableau 13 caractéristique du ventilateur ....................................................................................... 86
Tableau 14 Constante de l’air à -40 °C .......................................................................................... 86
Tableau 15 Liste des matériaux commandés par le magasin UQAC ............................................. 87
Tableau 16Liste des matériaux procurés à l'externe ....................................................................... 88
1 Introduction
1.1 Contexte
Le laboratoire international des matériaux antigivre (LIMA) de l’Université du Québec à
Chicoutimi travaille principalement sur les effets du givrage et du dégivrage sur les structures,
comme les plates-formes de forage en haute mer. Il existe dans leurs locaux un bon nombre
d’équipements permettant de simuler des conditions givrantes au sol et en vol, de reproduire le
comportement des avions, des hélicoptères et des éoliennes afin d’évaluer différents matériaux
glaciophobes. La majorité des essais sont réalisés à des températures en dessous du point de
congélation de l’eau. Cependant, le LIMA ne possède aucun équipement pouvant reproduire la
formation des embruns marins en haute mer. Ce projet a donc été soumis aux étudiants pour faire
la conception d’un prototype qui entrainera la réalisation de ce nouvel équipement. Cet
équipement doit répondre aux conditions définies par le promoteur. Ainsi, le phénomène naturel
de l’embrun marin doit être reproduit à plus petite échelle dans l’une des chambres climatiques
du LIMA.
1.2 Problématique
Une nouvelle problématique est apparue pour l'exploitation des plates-formes de forage en
haute mer. Maintenant, les compagnies pétrolières doivent aller de plus en plus loin dans le nord
pour retirer du pétrole, ce qui occasionne des problèmes de givrage dû à l’embrun marin et à la
température sous le point de congélation. Cet embrun, causé par l’interaction entre le vent et la
crête des vagues, peut atteindre des hauteurs suffisantes pour se solidifier sur les équipements et
ainsi engendrer des problèmes sur les opérations. Une procédure de dégivrage manuelle est
requise provoquant des coûts récurrents.
Les principales problématiques concernant le projet sont le nombre de variables qui entrent
en ligne de compte. Plusieurs variables sont indépendantes et d’autres dépendantes. L’impact des
variables dépendantes sur les autres n’est généralement pas connu. Cela a pour effet de
complexifier et d’augmenter le temps de la conception et des essais. Pour connaître les effets de
la variation de l’une d’elles, il faut modifier une seule variable à la fois et quantifier son impact
sur le système. Plusieurs variables se retrouvent donc dans le système et celles-ci doivent être
étudiées avec minutie et de façon indépendante. Par exemple, plusieurs variables, comme la
vitesse de poussée et le profil du fond marin, ont un effet sur la hauteur de la vague.
1.3 Objectifs
1.3.1 Objectif principal
L’objectif principal du projet est de livrer un prototype fonctionnel au LIMA qui répondra
aux objectifs spécifiques de celui-ci.
1.3.2 Objectifs spécifiques
Le prototype doit répondre aux objectifs détaillés suivants :
Le système doit être stable et fonctionner en circuit fermé
Les températures d’opération doivent se situer entre 0 et - 40°C
Reproduire les conditions maritimes réelles soit :
o Diamètre des gouttelettes compris entre 14 et 7 700 μm
o Des vitesses vents moyennes d’environ 18 m/s
Obtenir des résultats reproductibles
Facilement démontable et réduire l’espace pour l’entreposer
Minimiser la quantité d’eau nécessaire
Obtenir une hauteur de vague de 10 cm
1.4 Méthodologie utilisée
Suite à la revue de littérature, le phénomène peut être quantifié selon des critères bien
précis. On pourra, selon la salinité de l’eau, la température ambiante, la vitesse du vent et le
diamètre moyen des gouttelettes, quantifier l’échange de chaleur nécessaire pour l’obtention de
glace sur les parois de l’échantillon.
Afin de choisir le type de générateur de vague utilisé dans la formation de l’embrun marin,
une grille d’évaluation relative sera établie pour comparer les points forts et faibles des différents
modèles. À partir de cette grille sous forme de barème de pointage, le choix final du générateur
de vague sera fait. Suite à cela, le processus du dimensionnement du bassin et le calcul des forces
impliquées seront entamés.
Une fois la conception accomplie, des essais seront effectués pour identifier les paramètres
d’utilisation optimaux. De plus, ces essais permettront de valider si les objectifs initiaux ont été
atteints.
2 Recherche bibliographique
2.1 Paramètres généraux
L’eau salée à beaucoup de particularité. L’une d’elles est que la température de
congélation qui varie en fonction de la salinité de l’eau. Il est donc important de connaître ces
valeurs pour faire les essais avec les bons paramètres. La Figure A. 31 illustre cette variation. De
plus, le temps de refroidissement de la masse d’eau a été calculé afin de connaître le temps requis
pour refroidir le bassin lors de son entrée dans la chambre froide. Les résultats de ces calculs sont
exposés en annexe A.

2.2 Conditions réelles
Les objectifs spécifiques nommés plus haut ont été établis en fonction de la recherche
bibliographique. Elles sont principalement issues d’un rapport sur un voyage en haute mer qui
s’est déroulé sur une période de 2 mois. Le scientifique à bord à évaluer le diamètre des
gouttelettes qui variait de 14 à 7700 μm avec une moyenne de 234 μm. Un résumé de l’article1
est situé en annexe A.2.
2.3 Les types de générateurs de vagues
Plusieurs types de générateur de vague ont été développés au cours des années. Seulement
sept générateurs utilisant différents principes de fonctionnement ont été retenus et sont présentés
en annexe A.3.
3 Choix du procédé
3.1 Choix du générateur
Suite aux différents modèles qui ont été identifiés, une grille d’évaluation a été tracée
permettant de décider de façon analytique lequel des procédés est le plus optimal selon
l’utilisation désirée. Le choix est basé en fonction des différents critères présents dans le tableau
et qui sont classés et pondérés par ordre d’importance. Selon la grille de pointage présentée au
Tableau 1, le modèle générant une vague à l’aide d’une plaque à volet est choisi, car il obtient le
plus haut pointage.
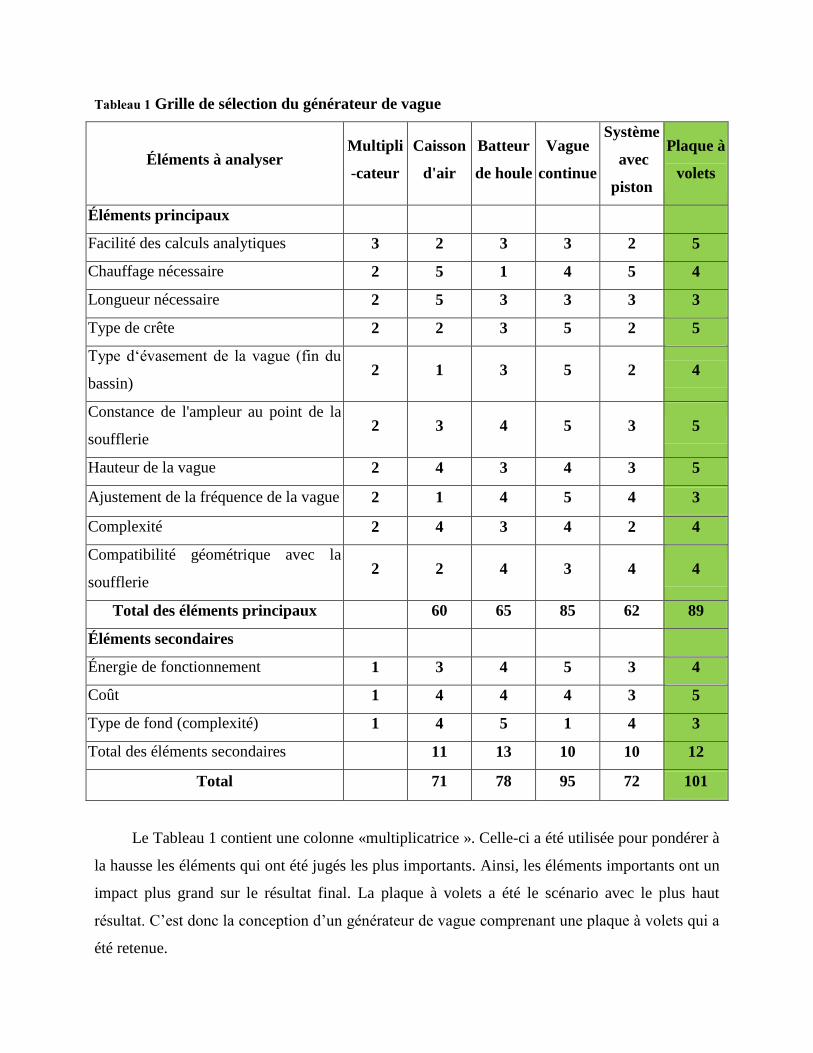
Tableau 1 Grille de sélection du générateur de vague
Éléments à analyser Multipli
-cateur
Caisson
d'air
Batteur
de houle
Vague
continue
Système
avec
piston
Plaque à
volets
Éléments principaux
Facilité des calculs analytiques 3 2 3 3 2 5
Chauffage nécessaire 2 5 1 4 5 4
Longueur nécessaire 2 5 3 3 3 3
Type de crête 2 2 3 5 2 5
Type d‘évasement de la vague (fin du
bassin) 2 1 3 5 2 4
Constance de l'ampleur au point de la
soufflerie 2 3 4 5 3 5
Hauteur de la vague 2 4 3 4 3 5
Ajustement de la fréquence de la vague 2 1 4 5 4 3
Complexité 2 4 3 4 2 4
Compatibilité géométrique avec la
soufflerie 2 2 4 3 4 4
Total des éléments principaux 60 65 85 62 89
Éléments secondaires
Énergie de fonctionnement 1 3 4 5 3 4
Coût 1 4 4 4 3 5
Type de fond (complexité) 1 4 5 1 4 3
Total des éléments secondaires 11 13 10 10 12
Total 71 78 95 72 101
Le Tableau 1 contient une colonne «multiplicatrice ». Celle-ci a été utilisée pour pondérer à
la hausse les éléments qui ont été jugés les plus importants. Ainsi, les éléments importants ont un
impact plus grand sur le résultat final. La plaque à volets a été le scénario avec le plus haut
résultat. C’est donc la conception d’un générateur de vague comprenant une plaque à volets qui a
été retenue.
3.2 Principe de fonctionnement
3.2.1 Bassin
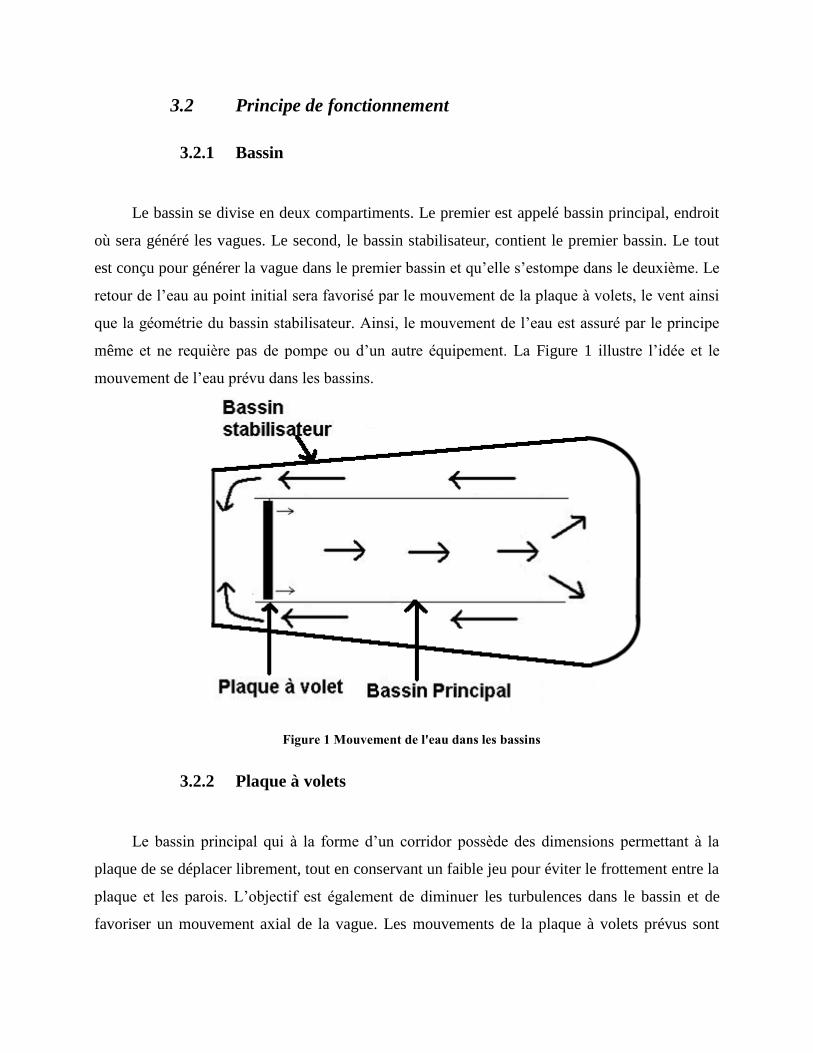
Le bassin se divise en deux compartiments. Le premier est appelé bassin principal, endroit
où sera généré les vagues. Le second, le bassin stabilisateur, contient le premier bassin. Le tout
est conçu pour générer la vague dans le premier bassin et qu’elle s’estompe dans le deuxième. Le
retour de l’eau au point initial sera favorisé par le mouvement de la plaque à volets, le vent ainsi
que la géométrie du bassin stabilisateur. Ainsi, le mouvement de l’eau est assuré par le principe
même et ne requière pas de pompe ou d’un autre équipement. La Figure 1 illustre l’idée et le
mouvement de l’eau prévu dans les bassins.
Figure 1 Mouvement de l'eau dans les bassins
3.2.2 Plaque à volets
Le bassin principal qui à la forme d’un corridor possède des dimensions permettant à la
plaque de se déplacer librement, tout en conservant un faible jeu pour éviter le frottement entre la
plaque et les parois. L’objectif est également de diminuer les turbulences dans le bassin et de
favoriser un mouvement axial de la vague. Les mouvements de la plaque à volets prévus sont
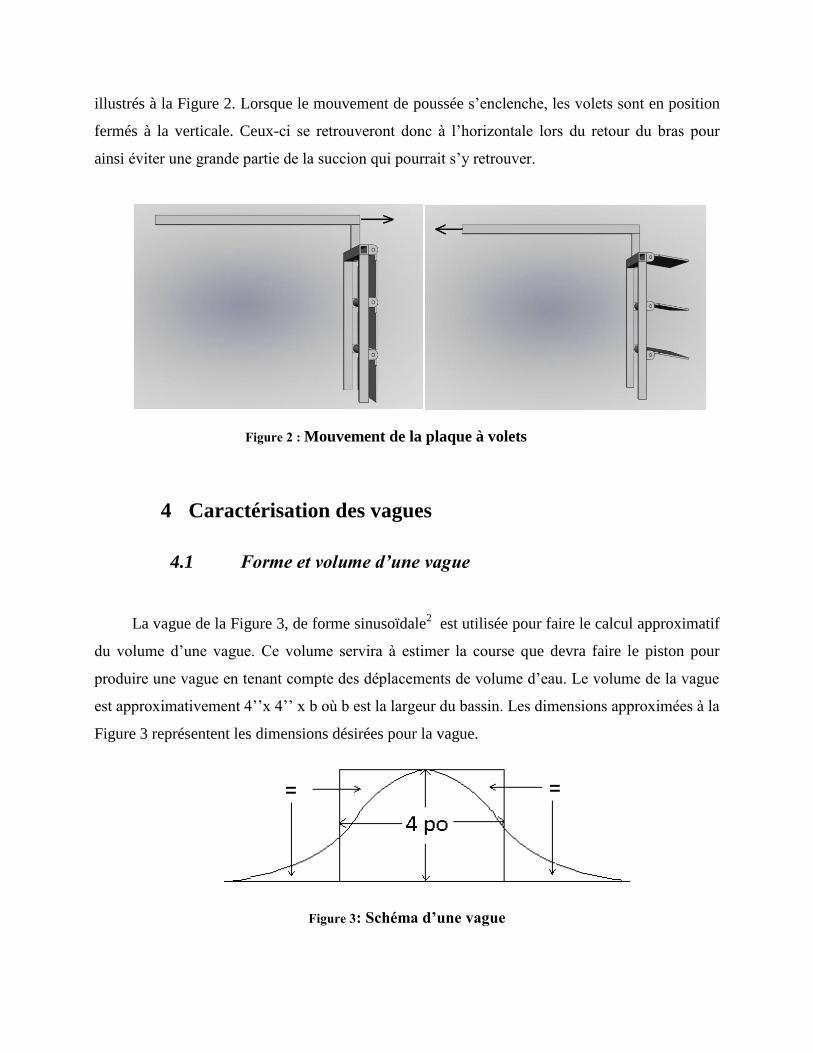
illustrés à la Figure 2. Lorsque le mouvement de poussée s’enclenche, les volets sont en position
fermés à la verticale. Ceux-ci se retrouveront donc à l’horizontale lors du retour du bras pour
ainsi éviter une grande partie de la succion qui pourrait s’y retrouver.
Figure 2 : Mouvement de la plaque à volets
4 Caractérisation des vagues
4.1 Forme et volume d’une vague
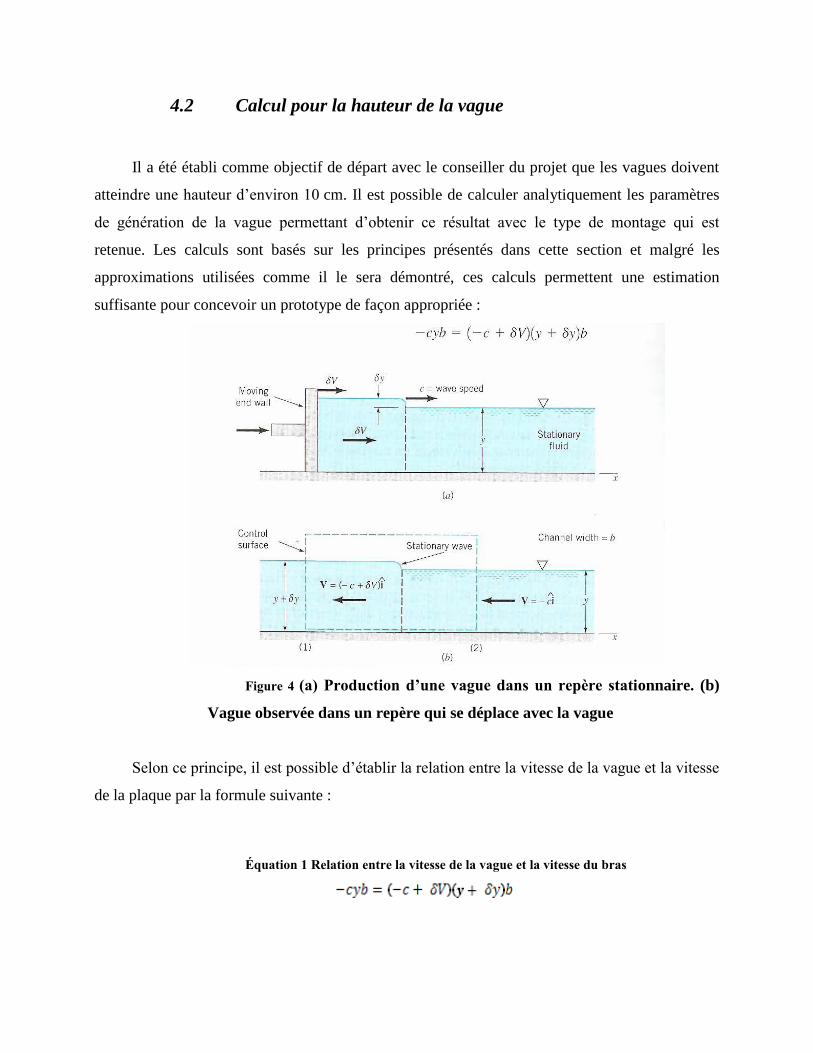
La vague de la Figure 3, de forme sinusoïdale2 est utilisée pour faire le calcul approximatif
du volume d’une vague. Ce volume servira à estimer la course que devra faire le piston pour
produire une vague en tenant compte des déplacements de volume d’eau. Le volume de la vague
est approximativement 4’’x 4’’ x b où b est la largeur du bassin. Les dimensions approximées à la
Figure 3 représentent les dimensions désirées pour la vague.
Figure 3: Schéma d’une vague
4.2 Calcul pour la hauteur de la vague
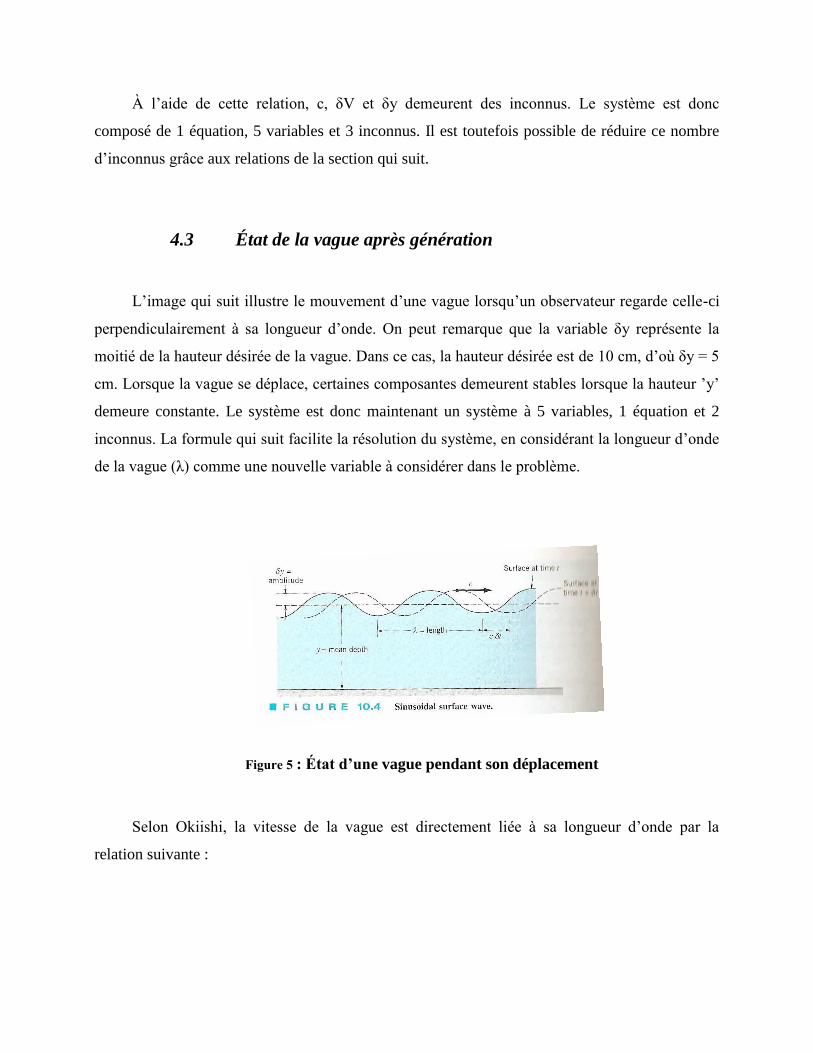
Il a été établi comme objectif de départ avec le conseiller du projet que les vagues doivent
atteindre une hauteur d’environ 10 cm. Il est possible de calculer analytiquement les paramètres
de génération de la vague permettant d’obtenir ce résultat avec le type de montage qui est
retenue. Les calculs sont basés sur les principes présentés dans cette section et malgré les
approximations utilisées comme il le sera démontré, ces calculs permettent une estimation
suffisante pour concevoir un prototype de façon appropriée :
Figure 4 (a) Production d’une vague dans un repère stationnaire. (b)
Vague observée dans un repère qui se déplace avec la vague
Selon ce principe, il est possible d’établir la relation entre la vitesse de la vague et la vitesse
de la plaque par la formule suivante :
Équation 1 Relation entre la vitesse de la vague et la vitesse du bras
À l’aide de cette relation, c, δV et δy demeurent des inconnus. Le système est donc
composé de 1 équation, 5 variables et 3 inconnus. Il est toutefois possible de réduire ce nombre
d’inconnus grâce aux relations de la section qui suit.
4.3 État de la vague après génération
L’image qui suit illustre le mouvement d’une vague lorsqu’un observateur regarde celle-ci
perpendiculairement à sa longueur d’onde. On peut remarque que la variable δy représente la
moitié de la hauteur désirée de la vague. Dans ce cas, la hauteur désirée est de 10 cm, d’où δy = 5
cm. Lorsque la vague se déplace, certaines composantes demeurent stables lorsque la hauteur ’y’
demeure constante. Le système est donc maintenant un système à 5 variables, 1 équation et 2
inconnus. La formule qui suit facilite la résolution du système, en considérant la longueur d’onde
de la vague (λ) comme une nouvelle variable à considérer dans le problème.
Figure 5 : État d’une vague pendant son déplacement
Selon Okiishi, la vitesse de la vague est directement liée à sa longueur d’onde par la
relation suivante :
Équation 2 Vitesse d'une vague en fonction de sa longueur d'onde
Toutefois, si le rapport y/λ est supérieur à 2, le résultat de la tangente hyperbolique est égal
à 1. Ce qui simplifie l’équation à la forme suivante :
Équation 3 Vitesse de la vague en fonction de sa longueur d'onde simplifiée
En établissant l’hypothèse de départ où la longueur d’onde de la vague est équivalente à la
moitié de la hauteur du niveau d’eau, soit 15 cm. L’hypothèse est basée sur le principe expliqué
précédemment pour avoir une longueur d’onde constante. Il est possible de résoudre le système
qui est désormais composé de 6 variables, 2 inconnus et 2 équations.
En résolvant le système d’équations pour une hauteur de la vague de 0.05 m et une
longueur d’onde de 0.15 m, la vitesse de la vague générée et la vitesse de la plaque nécessaire
pour produire cette vague, les résultats sont une vitesse de la vague de 0.5 m/s et de 0.071 m/s
pour la plaque à volets.
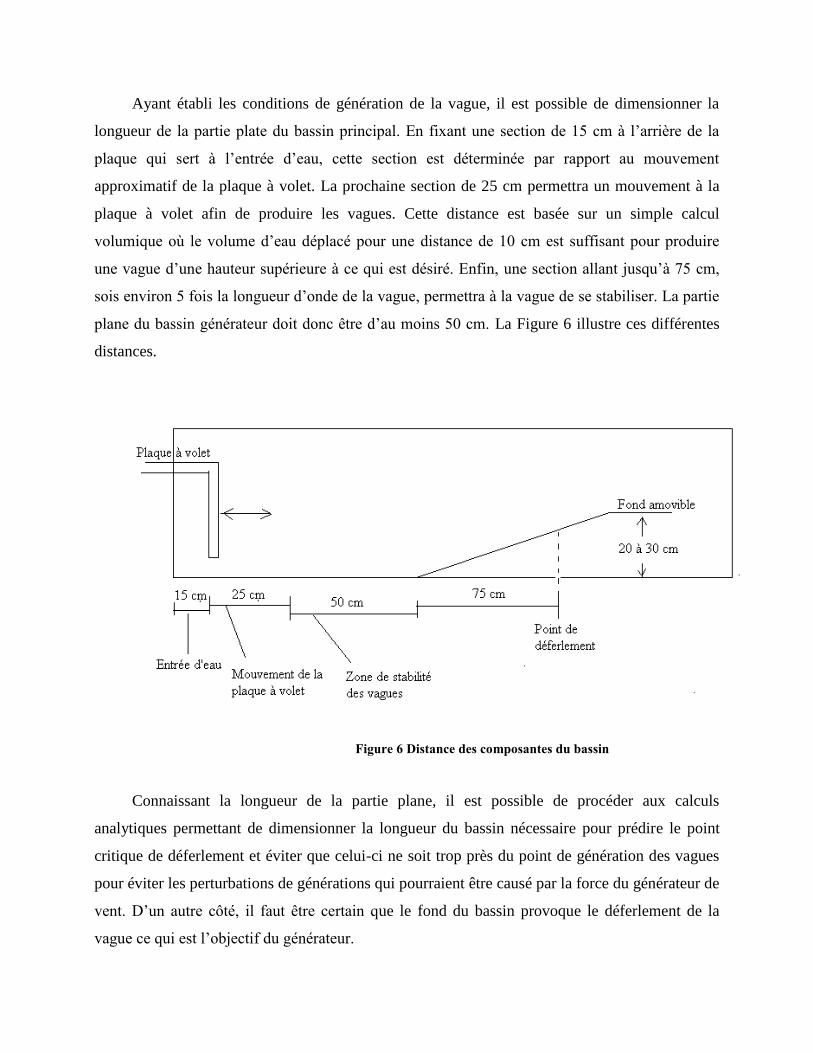
Ayant établi les conditions de génération de la vague, il est possible de dimensionner la
longueur de la partie plate du bassin principal. En fixant une section de 15 cm à l’arrière de la
plaque qui sert à l’entrée d’eau, cette section est déterminée par rapport au mouvement
approximatif de la plaque à volet. La prochaine section de 25 cm permettra un mouvement à la
plaque à volet afin de produire les vagues. Cette distance est basée sur un simple calcul
volumique où le volume d’eau déplacé pour une distance de 10 cm est suffisant pour produire
une vague d’une hauteur supérieure à ce qui est désiré. Enfin, une section allant jusqu’à 75 cm,
sois environ 5 fois la longueur d’onde de la vague, permettra à la vague de se stabiliser. La partie
plane du bassin générateur doit donc être d’au moins 50 cm. La Figure 6 illustre ces différentes
distances.
Figure 6 Distance des composantes du bassin
Connaissant la longueur de la partie plane, il est possible de procéder aux calculs
analytiques permettant de dimensionner la longueur du bassin nécessaire pour prédire le point
critique de déferlement et éviter que celui-ci ne soit trop près du point de génération des vagues
pour éviter les perturbations de générations qui pourraient être causé par la force du générateur de
vent. D’un autre côté, il faut être certain que le fond du bassin provoque le déferlement de la
vague ce qui est l’objectif du générateur.
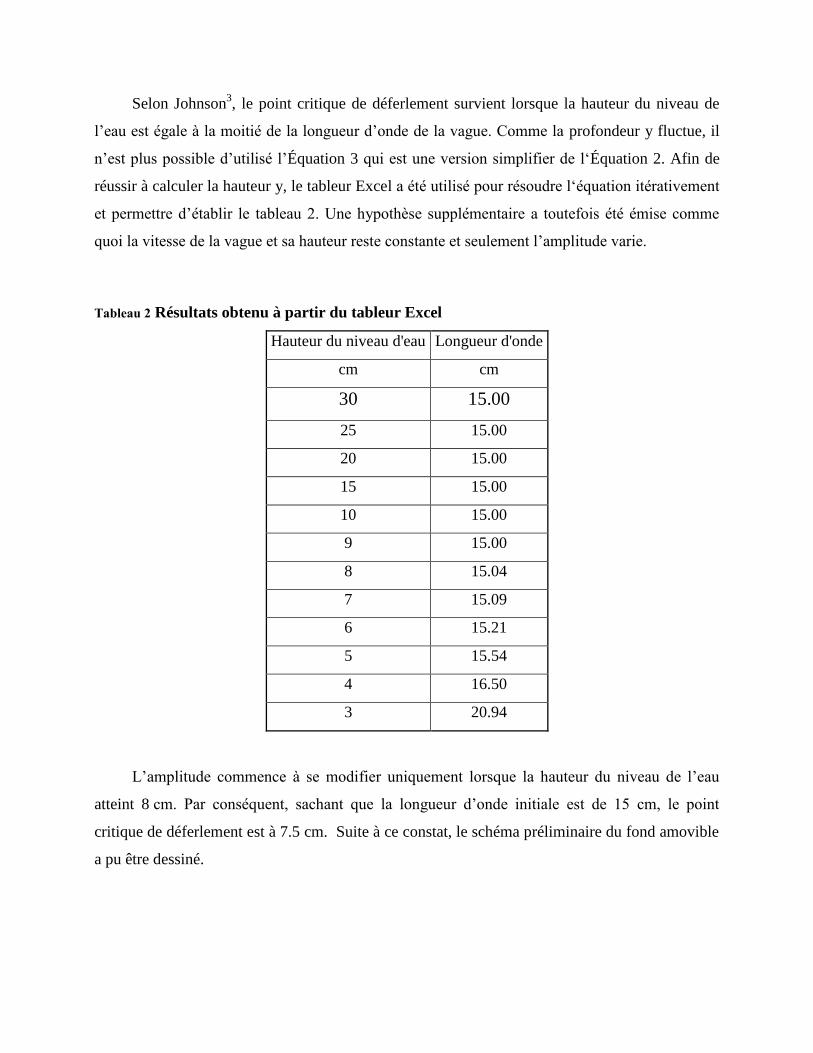
Selon Johnson3, le point critique de déferlement survient lorsque la hauteur du niveau de
l’eau est égale à la moitié de la longueur d’onde de la vague. Comme la profondeur y fluctue, il
n’est plus possible d’utilisé l’Équation 3 qui est une version simplifier de l‘Équation 2. Afin de
réussir à calculer la hauteur y, le tableur Excel a été utilisé pour résoudre l‘équation itérativement
et permettre d’établir le tableau 2. Une hypothèse supplémentaire a toutefois été émise comme
quoi la vitesse de la vague et sa hauteur reste constante et seulement l’amplitude varie.
Tableau 2 Résultats obtenu à partir du tableur Excel
Hauteur du niveau d'eau Longueur d'onde
cm cm
30 15.00
25 15.00
20 15.00
15 15.00
10 15.00
9 15.00
8 15.04
7 15.09
6 15.21
5 15.54
4 16.50
3 20.94
L’amplitude commence à se modifier uniquement lorsque la hauteur du niveau de l’eau
atteint 8 cm. Par conséquent, sachant que la longueur d’onde initiale est de 15 cm, le point
critique de déferlement est à 7.5 cm. Suite à ce constat, le schéma préliminaire du fond amovible
a pu être dessiné.
5 Éléments de conception
5.1 Conception du bassin principal
5.1.1 Fond amovible
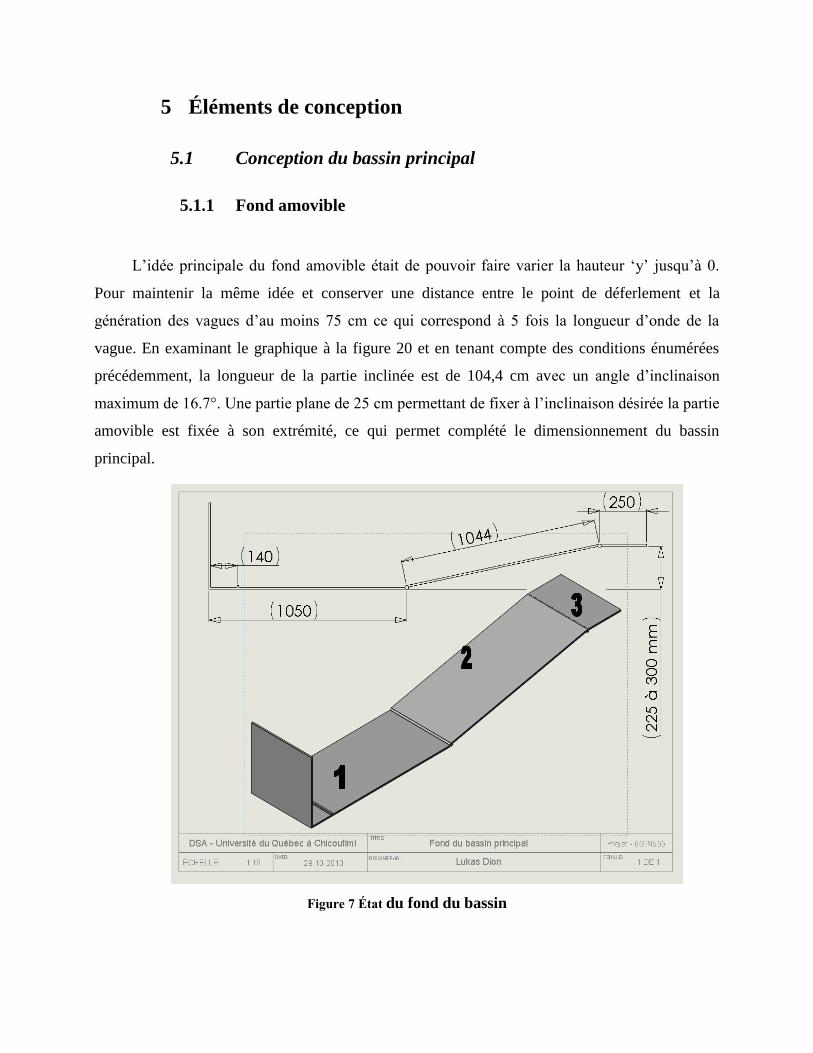
L’idée principale du fond amovible était de pouvoir faire varier la hauteur ‘y’ jusqu’à 0.
Pour maintenir la même idée et conserver une distance entre le point de déferlement et la
génération des vagues d’au moins 75 cm ce qui correspond à 5 fois la longueur d’onde de la
vague. En examinant le graphique à la figure 20 et en tenant compte des conditions énumérées
précédemment, la longueur de la partie inclinée est de 104,4 cm avec un angle d’inclinaison
maximum de 16.7°. Une partie plane de 25 cm permettant de fixer à l’inclinaison désirée la partie
amovible est fixée à son extrémité, ce qui permet complété le dimensionnement du bassin
principal.
Figure 7 État du fond du bassin
Le bassin stabilisateur s’étend sur 75 cm après la sortie du bassin principal pour assurer
l’évasement de la vague et éviter son retour vers le bassin principal. La forme à l’extrémité du
bassin stabilisateur est conçue de façon à ce que l’eau en mouvement soit redirigée vers les
entrées d’eau du bassin principal.
5.1.1.1 Niveau amovible
Cet élément a pour but de maintenir la section 3 du fond du bassin principale parallèle à la
surface de l’eau à l’équilibre. Il s’agit simplement d’un élément en bois fixé sous la paroi de la
section 3. Cet élément est traversé par 2 tiges de 50 cm filetées aux 2 extrémités. Ces tiges
traversent les parois du bassin principal et des vis papillon sont alors utilisées pour serrer le tout
en place.
Figure 8 Illustration du niveau amovible
5.1.2 Assemblage
La conception du bassin principal dépend prioritairement du fond de celui-ci qui est conçu
en fonction de favoriser la génération des vagues. Il est donc nécessaire d’identifier les
changements apportés à la conception préliminaire du fond avant de procéder à la conception du
bassin principal. Tout d’abord, la section verticale observable sur les plans préliminaires n’a pas
été conservée. Celle-ci a été jugée inutile, ainsi que la section 1 indiquée sur le bassin. Leurs
éliminations permettent une réduction des coûts de fabrication
La présence de 2 rotules est observable sur l’ébauche préliminaire. De celle-ci, seulement
celle qui relie la section 2 et la section 3 demeure présente. La rotule entre les sections 1 et 2 est
enlevée et la section 2 du fond amovible est maintenant libre de se déplacer horizontalement sur
le fond du bassin. Il a été considéré que certaines turbulences supplémentaires peuvent être
générées. Toutefois, l’impact de ces turbulences peut être négligé de façon substantielle en
considérant l’énergie transportée par la vague en surface par rapport au fond où l’énergie est
minimale.
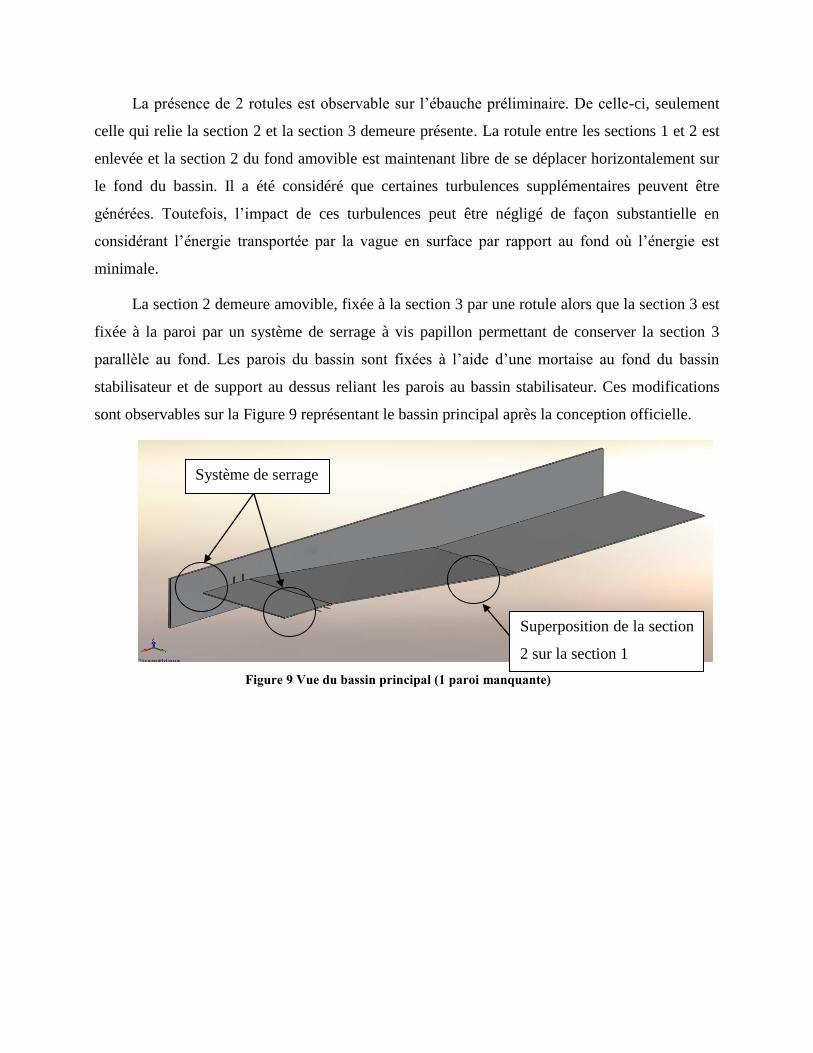
La section 2 demeure amovible, fixée à la section 3 par une rotule alors que la section 3 est
fixée à la paroi par un système de serrage à vis papillon permettant de conserver la section 3
parallèle au fond. Les parois du bassin sont fixées à l’aide d’une mortaise au fond du bassin
stabilisateur et de support au dessus reliant les parois au bassin stabilisateur. Ces modifications
sont observables sur la Figure 9 représentant le bassin principal après la conception officielle.
Figure 9 Vue du bassin principal (1 paroi manquante)
Système de serrage
Superposition de la section
2 sur la section 1
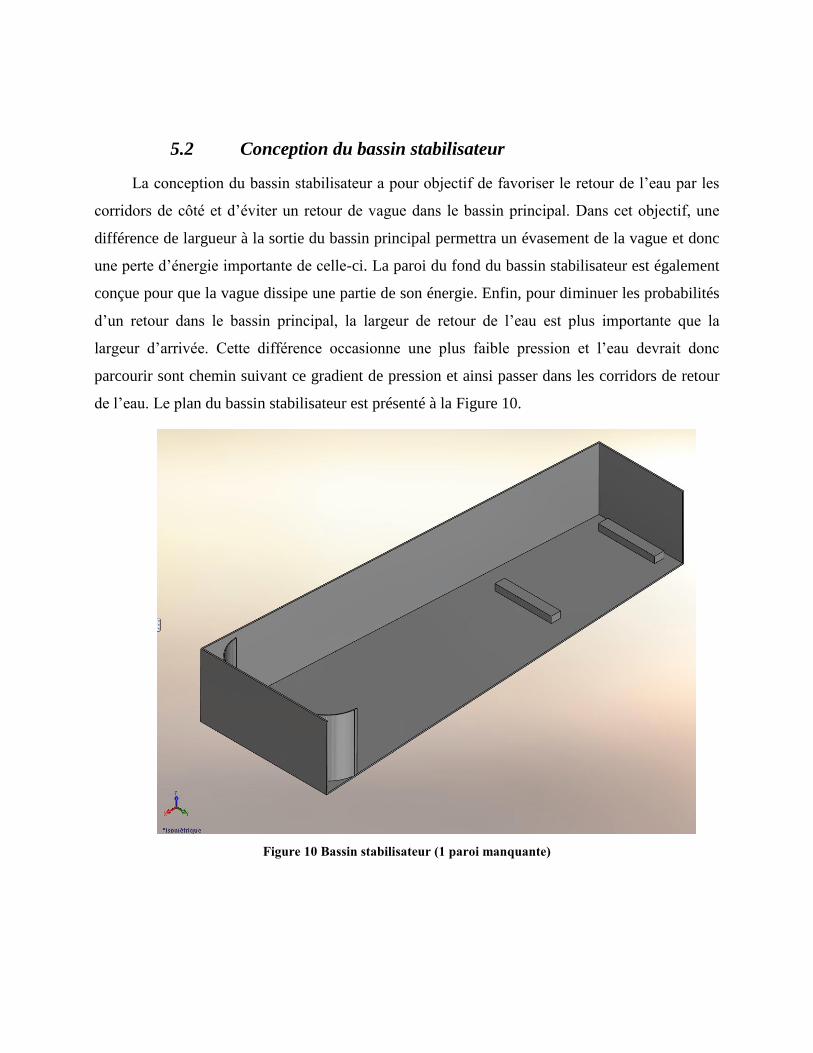
5.2 Conception du bassin stabilisateur
La conception du bassin stabilisateur a pour objectif de favoriser le retour de l’eau par les
corridors de côté et d’éviter un retour de vague dans le bassin principal. Dans cet objectif, une
différence de largueur à la sortie du bassin principal permettra un évasement de la vague et donc
une perte d’énergie importante de celle-ci. La paroi du fond du bassin stabilisateur est également
conçue pour que la vague dissipe une partie de son énergie. Enfin, pour diminuer les probabilités
d’un retour dans le bassin principal, la largeur de retour de l’eau est plus importante que la
largeur d’arrivée. Cette différence occasionne une plus faible pression et l’eau devrait donc
parcourir sont chemin suivant ce gradient de pression et ainsi passer dans les corridors de retour
de l’eau. Le plan du bassin stabilisateur est présenté à la Figure 10.
Figure 10 Bassin stabilisateur (1 paroi manquante)
5.2.1 Modification apportée au bassin stabilisateur
Dans l’objectif de faciliter certaines opérations de routine qui devront être effectuées sur le
bassin, certaines modifications ont été apportées au concept de base du bassin stabilisateur.
1. Diminution du volume d’eau du bassin : Les coûts de production de l’eau salée
sont élevés. Il est donc nécessaire de diminuer au maximum la quantité d’eau
utilisée. Pour ce faire, le bassin a été diminué en longueur de 10% réduisant la
masse d’eau du même pourcentage. De plus, la phase d’expérimentation du
générateur de vague contient une section prévue pour optimiser au minimum la
masse d’eau dans le bassin en modifiant la profondeur initiale.
2. Système de vidange d’eau : Afin d’éviter l’utilisation d’une pompe pour procéder
à la vidange du bassin. L’ajout d’une valve à l’extrémité la moins large du bassin a
été effectué.
3. Bassin décomposable en 2 sections : Dans l’objectif de diminuer l’espace
d’entreposage nécessaire et de faciliter les déplacements dans des endroits
restreints d’accès. Le bassin a été séparé au centre et sera divisé en 2 parties
distinctes. Ces deux composantes seront jointes au moyen d’une bride boulonnée.
Les détails relatifs à la bride sont disponibles dans la section qui suit.
5.2.2 Bride
Afin de répondre aux exigences de manutention de l’équipement, le bassin sera coupé en
deux et assemblée à l’aide d’une bride. Cette bride sera faite par l’assemblage mécano soudé
d’une cornière de 11/2’’x11/2’’x1/4’’. Le tout sera étanché par un joint d’étanchéité en
caoutchouc que l’on retrouve généralement dans ce genre d’assemblage. L’ensemble des calculs
est présenté en annexe B.
La résistance des boulons en tractions est supérieure à celle en cisaillement. La force
résultante calculée est donc très faible si on considère la quantité de boulons qu’il doit être utilisé
pour assurer l’étanchéité du bassin. La bride doit parcourir tout le contour du bassin au centre, ce
qui signifie une distance de 1,87 mètre. Afin d’assurer l’étanchéité, une distance entre les boulons
de 5 cm a été établie. Ainsi, il faut 37 boulons de 3/8 pouce de diamètre pour l’assemblage, ce
qui engendra un facteur de sécurité supérieur à 100 sur la résistance des boulons. La force de
présserrage des boulons est de 73 N mm.
5.3 Support pour le montage
Le montage sera sur un support muni de roues permettant ainsi de le déplacer hors de la
chambre froide lorsqu’il ne sera plus en utilisation. Cependant, comme le prototype est de
dimension importante, il est nécessaire de s’assurer que la disposition de celui-ci sur le support
est sécuritaire.
Le bassin contient un volume d’eau total d’environ 0.62 m3, ce qui correspond à une masse
de 650 kilogrammes, lorsque remplis d’eau salée. Les matériaux composants le bras amovible, la
soufflerie et le bassin correspondent à une masse supplémentaire de 200 kg. Le support du
prototype devra nécessairement pouvoir soutenir au minimum, une charge de 850 kg.
Un support a été fourni par le LIMA pouvant soutenir les charges requises. Par contre,
celui-ci était de dimension inférieure à la dimension du prototype. Cela dit, les risques de
basculement doivent être considérés afin d’assurer la sécurité des utilisateurs.
La masse du prototype est distribuée de façon symétrique dans le sens de la largueur du
bassin. Par contre, le centre de masse est difficilement calculable en termes de longueur. Pour
contrer cette difficulté, une méthode de calcul examinant les cas extrêmes de chargement a été
utilisée pour s’assurer que le bassin ne basculerait pas. La méthode d’analyse considère deux
cas :
Basculement du côté de l’équipement pneumatique
Basculement du côté où le bassin est le plus large
Dans ces deux situations, le risque de basculement lorsque le bassin est vide et lorsque
celui-ci est plein a été considéré. Lors des calculs, la bride du bassin a été positionnée sur le
même plan que le centre du support. Les détails des calculs sont présentés à l’annexe B.
Parmi les scénarios envisagés, le seul cas critique se situe au niveau du côté de
l’équipement pneumatique lorsque le bassin est vide. Conséquemment, des mesures de sécurité
supplémentaires ont été utilisées lorsque le bassin a été positionné sur le support. En utilisant un
chariot élévateur, le prototype a été mis en place sur le support, tout en s’assurant que les risques
réels de basculement étaient minimes. Effectivement, le calcul dans un cas extrême démontre
qu’il n’est pas impossible qu’un basculement survienne, mais celui-ci est minime et l’utilisation
d’un contrepoids est amplement suffisante pour assurer la sécurité de l’utilisateur.
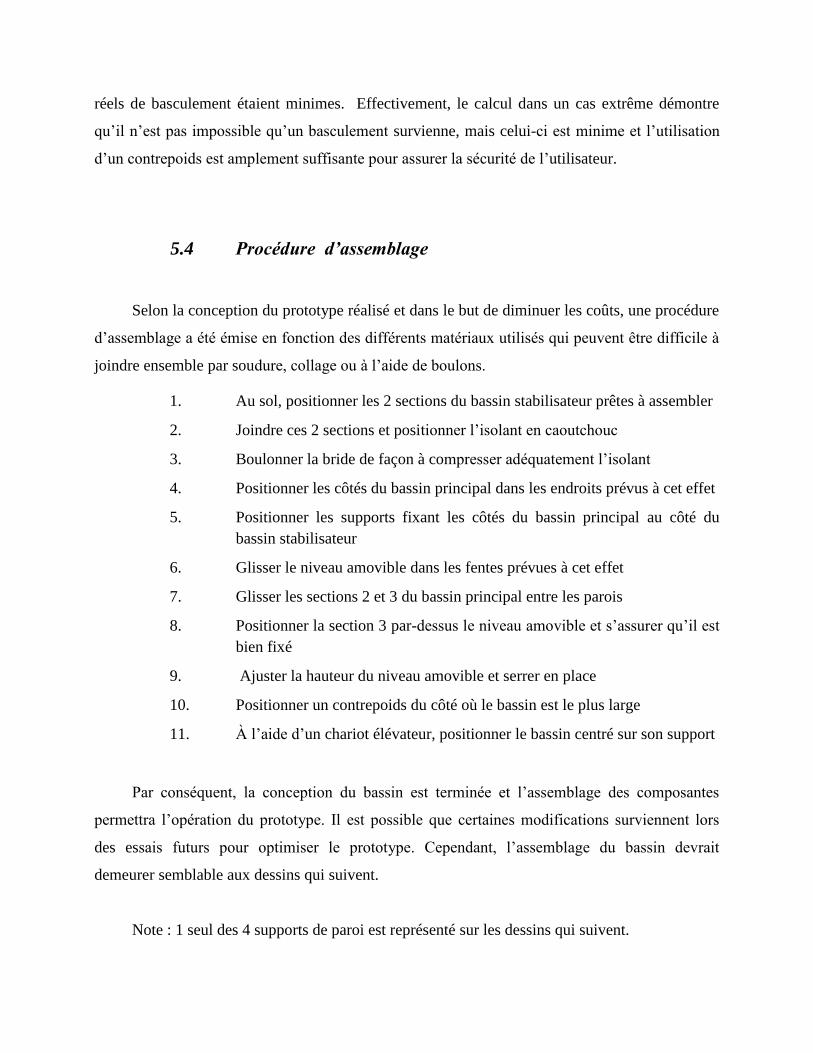
5.4 Procédure d’assemblage
Selon la conception du prototype réalisé et dans le but de diminuer les coûts, une procédure
d’assemblage a été émise en fonction des différents matériaux utilisés qui peuvent être difficile à
joindre ensemble par soudure, collage ou à l’aide de boulons.
1. Au sol, positionner les 2 sections du bassin stabilisateur prêtes à assembler
2. Joindre ces 2 sections et positionner l’isolant en caoutchouc
3. Boulonner la bride de façon à compresser adéquatement l’isolant
4. Positionner les côtés du bassin principal dans les endroits prévus à cet effet
5. Positionner les supports fixant les côtés du bassin principal au côté du
bassin stabilisateur
6. Glisser le niveau amovible dans les fentes prévues à cet effet
7. Glisser les sections 2 et 3 du bassin principal entre les parois
8. Positionner la section 3 par-dessus le niveau amovible et s’assurer qu’il est
bien fixé
9. Ajuster la hauteur du niveau amovible et serrer en place
10. Positionner un contrepoids du côté où le bassin est le plus large
11. À l’aide d’un chariot élévateur, positionner le bassin centré sur son support
Par conséquent, la conception du bassin est terminée et l’assemblage des composantes
permettra l’opération du prototype. Il est possible que certaines modifications surviennent lors
des essais futurs pour optimiser le prototype. Cependant, l’assemblage du bassin devrait
demeurer semblable aux dessins qui suivent.
Note : 1 seul des 4 supports de paroi est représenté sur les dessins qui suivent.
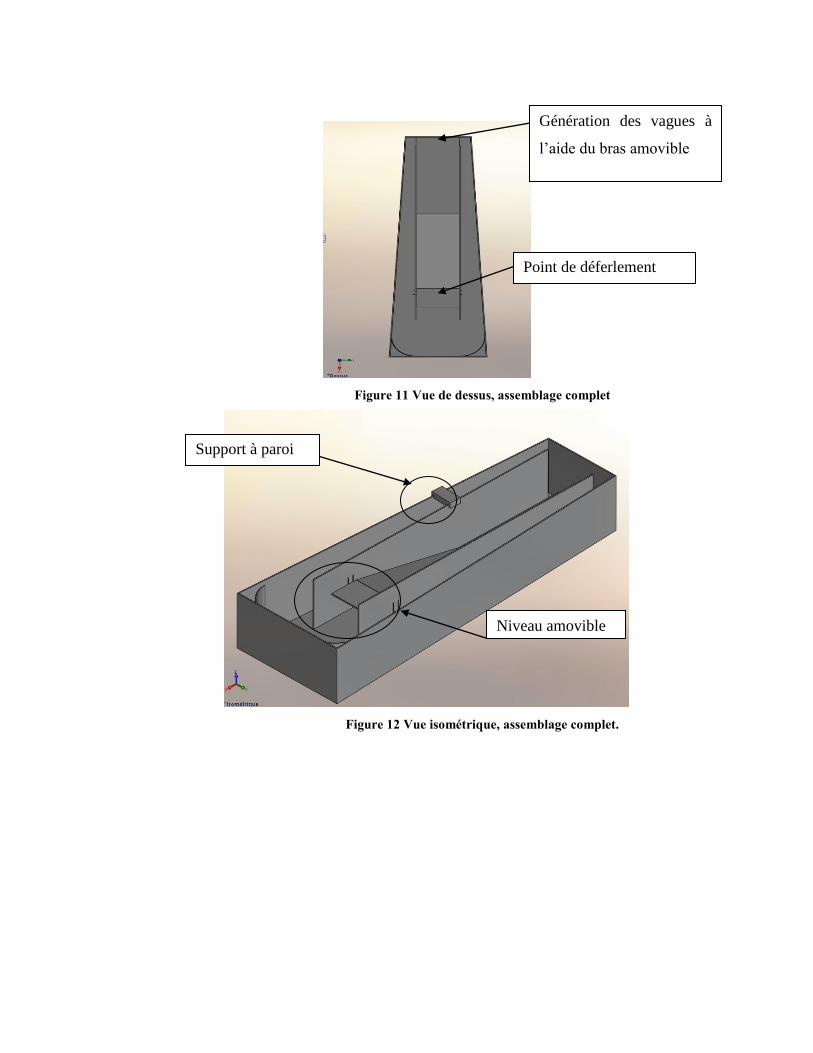
Figure 11 Vue de dessus, assemblage complet
Figure 12 Vue isométrique, assemblage complet.
Génération des vagues à
l’aide du bras amovible
Point de déferlement
Niveau amovible
Support à paroi
5.5 Conception du générateur de vague
5.5.1 Volets
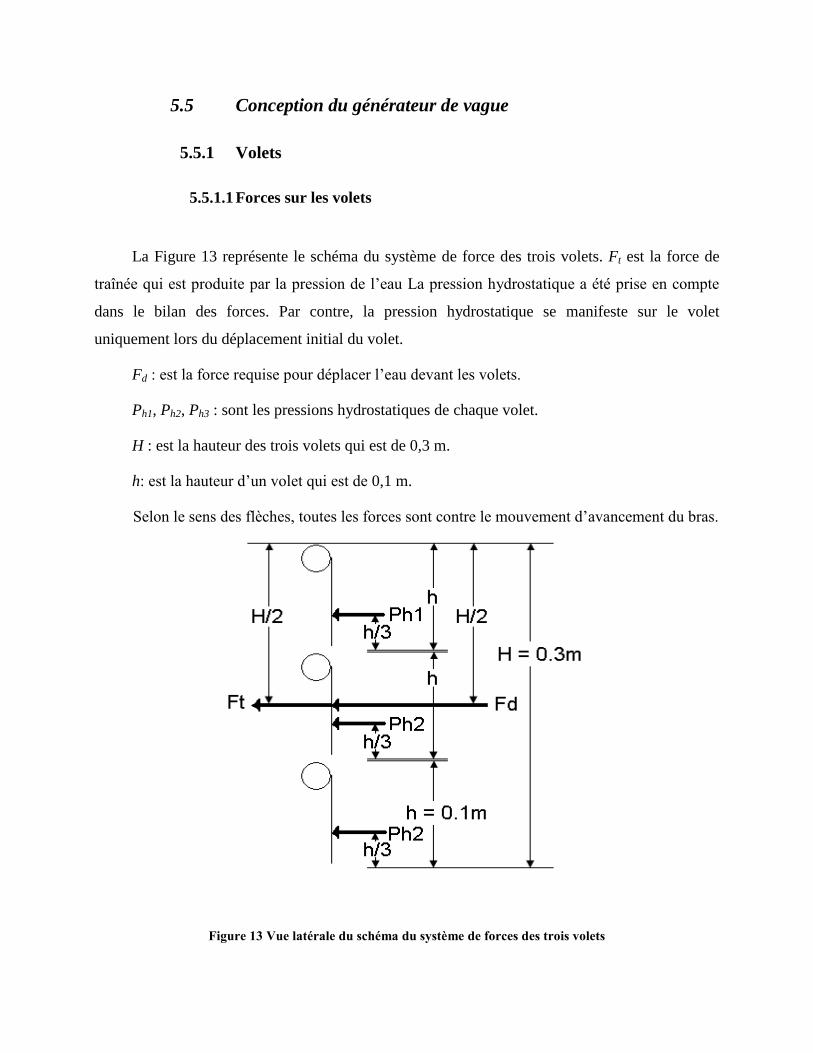
5.5.1.1 Forces sur les volets
La Figure 13 représente le schéma du système de force des trois volets. Ft est la force de
traînée qui est produite par la pression de l’eau La pression hydrostatique a été prise en compte
dans le bilan des forces. Par contre, la pression hydrostatique se manifeste sur le volet
uniquement lors du déplacement initial du volet.
Fd : est la force requise pour déplacer l’eau devant les volets.
Ph1, Ph2, Ph3 : sont les pressions hydrostatiques de chaque volet.
H : est la hauteur des trois volets qui est de 0,3 m.
h: est la hauteur d’un volet qui est de 0,1 m.
Selon le sens des flèches, toutes les forces sont contre le mouvement d’avancement du bras.
Figure 13 Vue latérale du schéma du système de forces des trois volets
La force résultante calculée est de 201 N à la mi-hauteur. Le détail des calculs des trois
types de forces en jeu sont dans la section 11.2 de l’annexe B. Cette force sera donc utilisée pour
les simulations par éléments finis ainsi que pour sa validation.
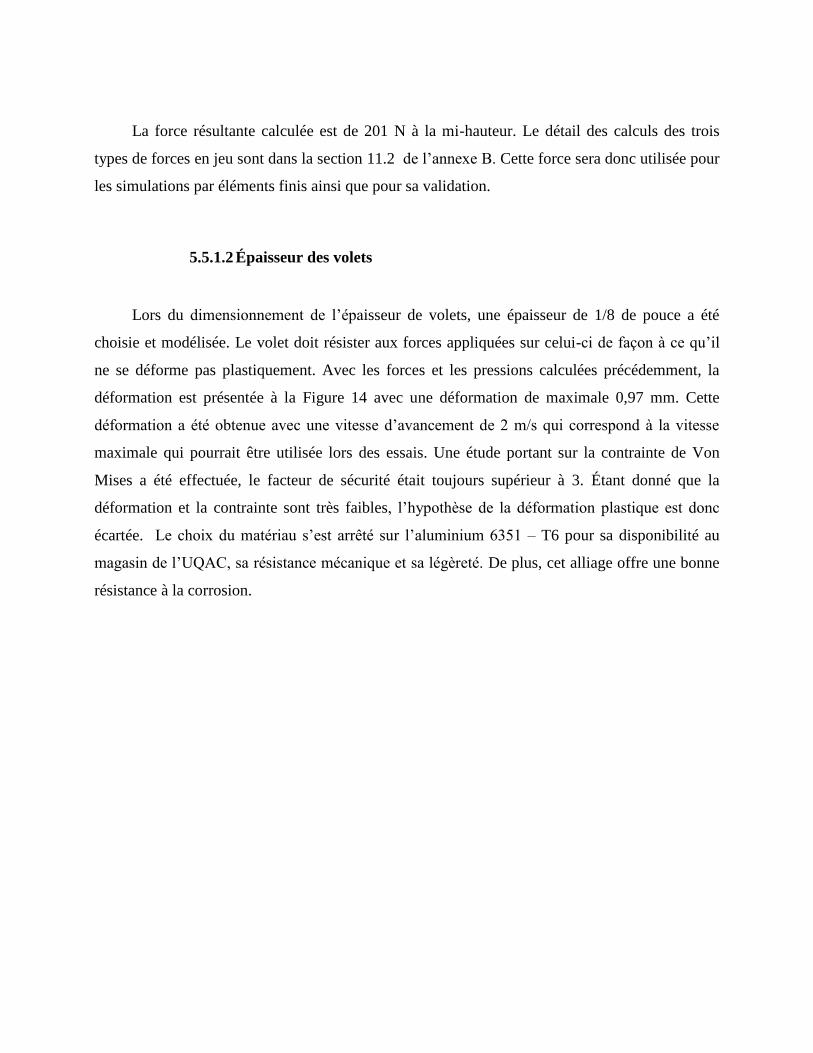
5.5.1.2 Épaisseur des volets
Lors du dimensionnement de l’épaisseur de volets, une épaisseur de 1/8 de pouce a été
choisie et modélisée. Le volet doit résister aux forces appliquées sur celui-ci de façon à ce qu’il
ne se déforme pas plastiquement. Avec les forces et les pressions calculées précédemment, la
déformation est présentée à la Figure 14 avec une déformation de maximale 0,97 mm. Cette
déformation a été obtenue avec une vitesse d’avancement de 2 m/s qui correspond à la vitesse
maximale qui pourrait être utilisée lors des essais. Une étude portant sur la contrainte de Von
Mises a été effectuée, le facteur de sécurité était toujours supérieur à 3. Étant donné que la
déformation et la contrainte sont très faibles, l’hypothèse de la déformation plastique est donc
écartée. Le choix du matériau s’est arrêté sur l’aluminium 6351 – T6 pour sa disponibilité au
magasin de l’UQAC, sa résistance mécanique et sa légèreté. De plus, cet alliage offre une bonne
résistance à la corrosion.
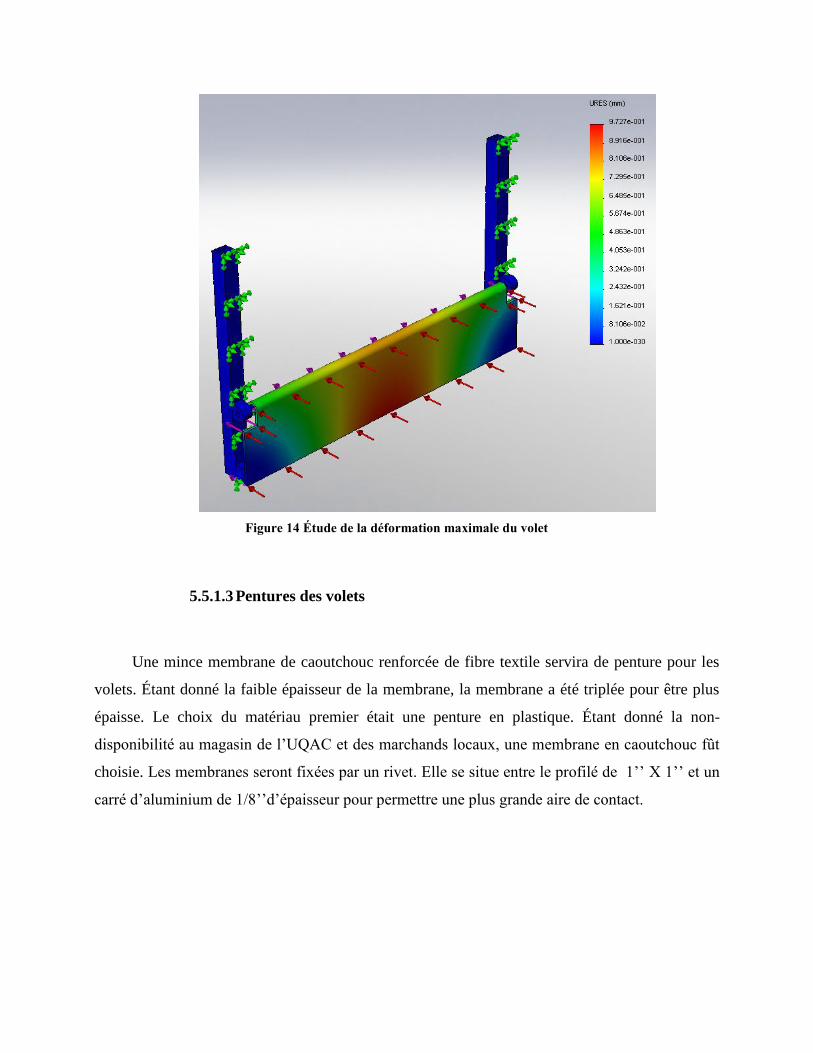
Figure 14 Étude de la déformation maximale du volet
5.5.1.3 Pentures des volets
Une mince membrane de caoutchouc renforcée de fibre textile servira de penture pour les
volets. Étant donné la faible épaisseur de la membrane, la membrane a été triplée pour être plus
épaisse. Le choix du matériau premier était une penture en plastique. Étant donné la non-
disponibilité au magasin de l’UQAC et des marchands locaux, une membrane en caoutchouc fût
choisie. Les membranes seront fixées par un rivet. Elle se situe entre le profilé de 1’’ X 1’’ et un
carré d’aluminium de 1/8’’d’épaisseur pour permettre une plus grande aire de contact.
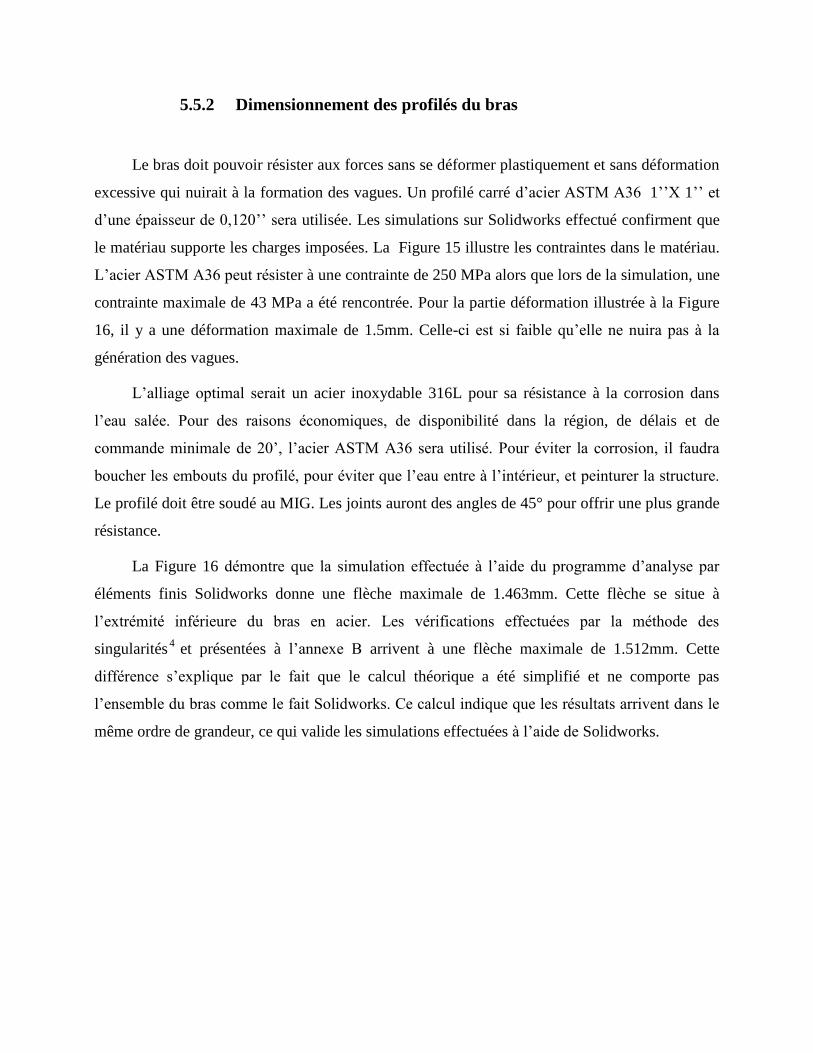
5.5.2 Dimensionnement des profilés du bras
Le bras doit pouvoir résister aux forces sans se déformer plastiquement et sans déformation
excessive qui nuirait à la formation des vagues. Un profilé carré d’acier ASTM A36 1’’X 1’’ et
d’une épaisseur de 0,120’’ sera utilisée. Les simulations sur Solidworks effectué confirment que
le matériau supporte les charges imposées. La Figure 15 illustre les contraintes dans le matériau.
L’acier ASTM A36 peut résister à une contrainte de 250 MPa alors que lors de la simulation, une
contrainte maximale de 43 MPa a été rencontrée. Pour la partie déformation illustrée à la Figure
16, il y a une déformation maximale de 1.5mm. Celle-ci est si faible qu’elle ne nuira pas à la
génération des vagues.
L’alliage optimal serait un acier inoxydable 316L pour sa résistance à la corrosion dans
l’eau salée. Pour des raisons économiques, de disponibilité dans la région, de délais et de
commande minimale de 20’, l’acier ASTM A36 sera utilisé. Pour éviter la corrosion, il faudra
boucher les embouts du profilé, pour éviter que l’eau entre à l’intérieur, et peinturer la structure.
Le profilé doit être soudé au MIG. Les joints auront des angles de 45° pour offrir une plus grande
résistance.
La Figure 16 démontre que la simulation effectuée à l’aide du programme d’analyse par
éléments finis Solidworks donne une flèche maximale de 1.463mm. Cette flèche se situe à
l’extrémité inférieure du bras en acier. Les vérifications effectuées par la méthode des
singularités4 et présentées à l’annexe B arrivent à une flèche maximale de 1.512mm. Cette
différence s’explique par le fait que le calcul théorique a été simplifié et ne comporte pas
l’ensemble du bras comme le fait Solidworks. Ce calcul indique que les résultats arrivent dans le
même ordre de grandeur, ce qui valide les simulations effectuées à l’aide de Solidworks.
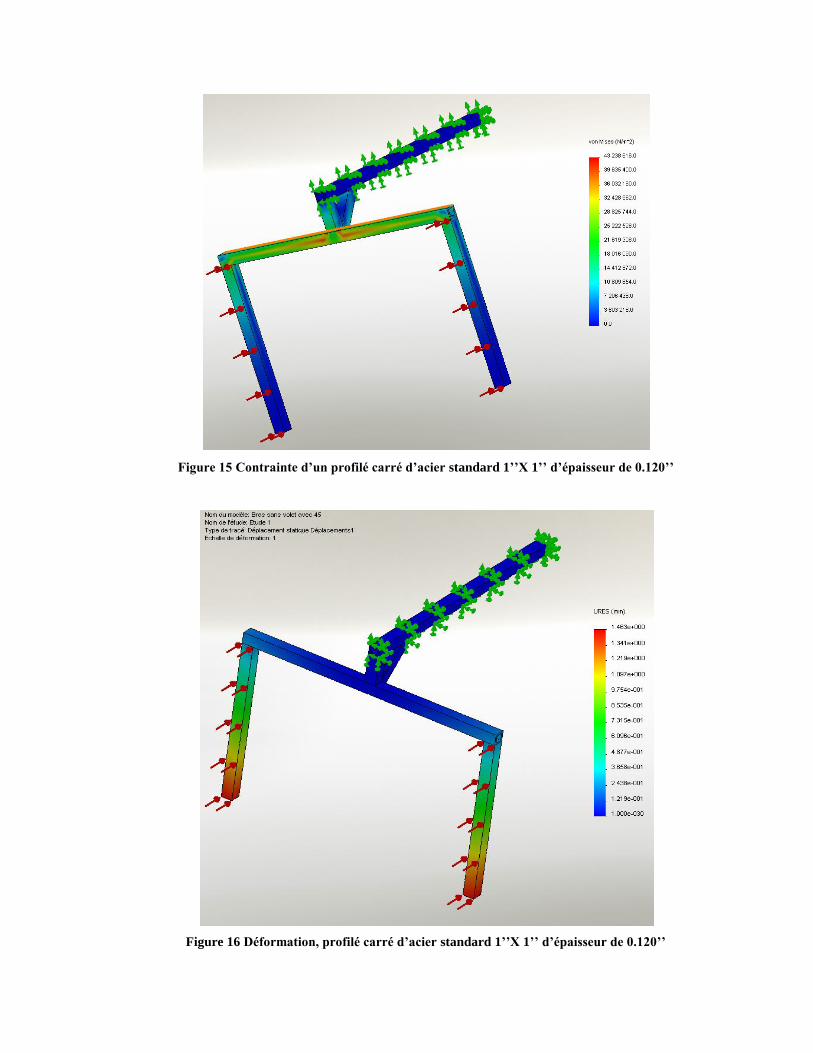
Figure 15 Contrainte d’un profilé carré d’acier standard 1’’X 1’’ d’épaisseur de 0.120’’
Figure 16 Déformation, profilé carré d’acier standard 1’’X 1’’ d’épaisseur de 0.120’’

5.5.2.1 Résistance en fatigue
L’acier standard utilisé sera sollicité à de nombreuses répétitions. Il est donc nécessaire de
le dimensionner de façon à prévenir sa rupture. Comme la contrainte maximale atteinte sera de 43
MPa, il est possible à l’aide d’une courbe de Wöhler5 de déterminer s’il y aura rupture et dans un
tel cas et de prévoir le nombre de cycles de chargement où la pièce pourra être utilisée. La courbe
illustrée à la Figure 17 est représentative d’un acier standard et la limite inférieure se situe
environ à 225 MPa. Ceci indique donc qu’avec une contrainte maximale de 43 MPa, et en
émettant l’hypothèse que la pièce est exempte de défauts, le bras utilisé a une durée de vie
théorique pour un nombre de cycles infinis.
Figure 17 : Courbe de Wöhler d’un acier standard
5.5.3 Système de glissière
Une glissière de faible qualité a été sélectionnée pour des raisons économiques. Étant donné
les faibles contraintes selon l’axe horizontal et la distance entre les pattes du bras, ce système est
satisfaisant pour le prototype et devrait répondre aux besoins de ce dernier. Le type de glissière
exacte se retrouve dans la section 6.1.
5.5.4 Vérin
5.5.4.1 Dimensionnement du vérin
Le vérin doit combattre la force de traînée et la force de l’eau. L’efficacité d’un vérin est de
90%. Cela nous donne une force totale que le vérin doit produire de 230N comme le démontre la
Figure 13. La ligne d’alimentation pneumatique de l’UQAC fournit une pression de 100 PSI ce
qui revient à 689475.7N/m2. Les calculs présentés en annexe B décrivent l’aire et le diamètre
minimum que doit avoir le piston du vérin pneumatique. Un diamètre de 1 ½’’ sera donc
sélectionné.
5.5.4.2 Dimensionnement du support du vérin
Étant donné les délais serrés, une approche de surdimensionnement sera employée. Avec
les connaissances et les expériences des membres de l’équipe et une validation des techniciens de
l’UQAC, un fer angle de 2’’ de largeur et d’une épaisseur de ¼ de pouce a été sélectionné. Pour
maintenir le vérin en place, les deux bouts du vérin seront fixés par un système de pivot maintenu
par des pinnes de maintien. Il n’y a pas eu de dimensionnement pour ces pivots, car ils ont été
conçus dans ce but précis et sont fournis par la même compagnie qui vend le vérin. Étant donné
que le générateur de vagues doit être démontable, un assemblage par boulon a été choisi. Pour ce
faire, une barre d’acier de 1’’X1’’ sera filetée et soudée sur la paroi externe du bassin.
5.5.4.3 Système pneumatique
Plusieurs méthodes de contrôle pneumatique ont été étudiées. Pour des raisons
économiques, une approche simple a été sélectionnée, sans toutefois négliger la sécurité. Ce
système est représenté à la Figure 18. Pour démarrer le système, il suffira d’appuyer sur le bouton
marche et par la suite le bouton avance. Le vérin avancera et commencera son cycle continu de
va-et-vient. Deux interrupteurs de fin de course magnétiques contrôlent le déplacement du vérin.
Ce type de capteur a été sélectionné pour éviter un capteur mécanique qui reçoit des chocs et qui

peut givré. Lorsque le vérin arrive à la position souhaitée, il repart dans le sens contraire au
contact de l’un de ces interrupteurs de fin de course. Pour arrêter le cycle ou pour des raisons de
sécurité, l’opérateur peut couper à tout moment l’énergie électrique et pneumatique du système
en pressant un bouton d’urgence. Les deux valves unidirectionnelles à débit variable servent à
contrôler les vitesses de sortie et d'entrée du vérin de façon indépendante. Deux tiroirs
pneumatiques sont utilisés pour contrôler le vérin. Le tiroir, en bas de la Figure 18 doit être
alimenté avec un voltage constant de 120V pour alimenter le vérin en air. Dès que le courant est
coupé par le bouton d’arrêt d’urgence, le vérin n’est plus alimenté. Le second tiroir pneumatique
sert à faire changer de direction le vérin. Un front montant de 120V fait déplacer le tiroir du côté
que le courant électrique arrive.
Figure 18 : Schéma du système pneumatique du générateur de vagues

5.5.4.4 Schéma électrique
Un relais électrique à quatre contacts normalement ouvert a été sélectionné pour mettre en
fonction le système. C’est ce relais qui coupe également l’énergie électrique et pneumatique
lorsque le bouton d’arrêt d’urgence est enclenché comme le démontre la Figure 19.
Figure 19 : Schéma électrique du générateur de vagues

5.6 Conception de la soufflerie
5.6.1 Conduit de ventilation
La sortie circulaire du ventilateur doit être convertie en un rectangle pour mieux adapter la
sortie d’air sur le sommet des vagues. Les caractéristiques du ventilateur sont présentées à
l’annexe B. Dans ce rapport, deux possibilités ont été retenues pour le dimensionnement des
conduits de ventilation. Le scénario 1 prévoit une réduction de la section de la moitié et le
scénario 2 du tiers de la section initiale. La Figure 20 montre les différentes options envisagées.
Figure 20 Options envisagées pour le raccordement des conduits
Le nombre de Reynolds se calcule avec l’équation suivante :
Équation 4 Nombre de Reynolds
Le diamètre équivalent est utilisé pour simplifier le changement de section dans le conduit.
Il est obtenu en correspondant l’aire du rectangle avec celle d’un cercle.
Équation 5 Diamètre équivalent
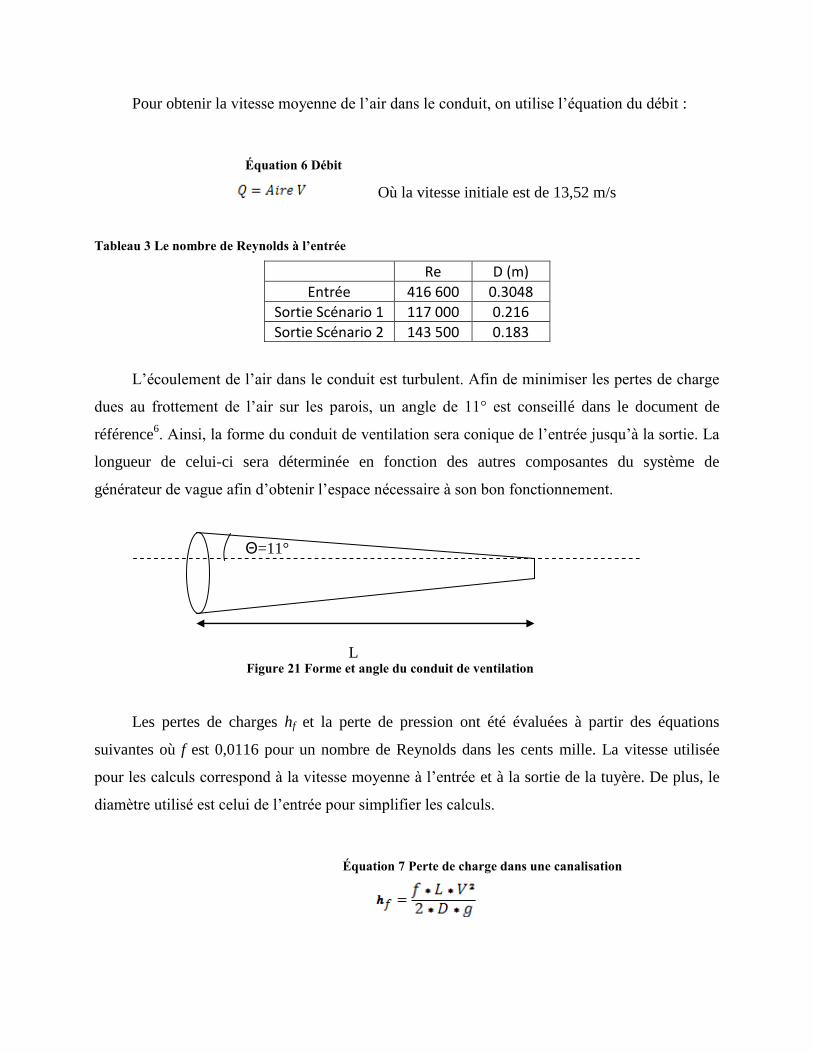
Pour obtenir la vitesse moyenne de l’air dans le conduit, on utilise l’équation du débit :
Équation 6 Débit
Où la vitesse initiale est de 13,52 m/s
Tableau 3 Le nombre de Reynolds à l’entrée
Re D (m)
Entrée 416 600 0.3048
Sortie Scénario 1 117 000 0.216
Sortie Scénario 2 143 500 0.183
L’écoulement de l’air dans le conduit est turbulent. Afin de minimiser les pertes de charge
dues au frottement de l’air sur les parois, un angle de 11° est conseillé dans le document de
référence6. Ainsi, la forme du conduit de ventilation sera conique de l’entrée jusqu’à la sortie. La
longueur de celui-ci sera déterminée en fonction des autres composantes du système de
générateur de vague afin d’obtenir l’espace nécessaire à son bon fonctionnement.
Les pertes de charges hf et la perte de pression ont été évaluées à partir des équations
suivantes où f est 0,0116 pour un nombre de Reynolds dans les cents mille. La vitesse utilisée
pour les calculs correspond à la vitesse moyenne à l’entrée et à la sortie de la tuyère. De plus, le
diamètre utilisé est celui de l’entrée pour simplifier les calculs.
Équation 7 Perte de charge dans une canalisation
Θ=11°
L Figure 21 Forme et angle du conduit de ventilation
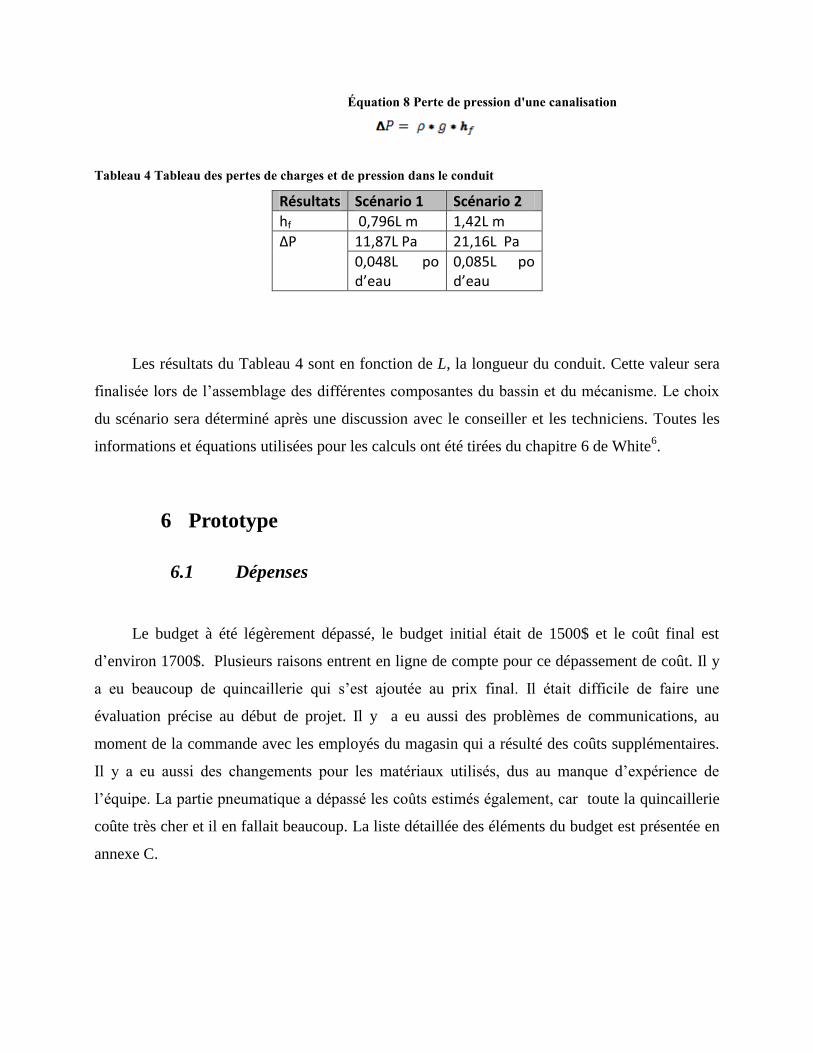
Équation 8 Perte de pression d'une canalisation
Tableau 4 Tableau des pertes de charges et de pression dans le conduit
Résultats Scénario 1 Scénario 2
hf 0,796L m 1,42L m
ΔP 11,87L Pa 21,16L Pa
0,048L po d’eau
0,085L po d’eau
Les résultats du Tableau 4 sont en fonction de L, la longueur du conduit. Cette valeur sera
finalisée lors de l’assemblage des différentes composantes du bassin et du mécanisme. Le choix
du scénario sera déterminé après une discussion avec le conseiller et les techniciens. Toutes les
informations et équations utilisées pour les calculs ont été tirées du chapitre 6 de White6.
6 Prototype
6.1 Dépenses
Le budget à été légèrement dépassé, le budget initial était de 1500$ et le coût final est
d’environ 1700$. Plusieurs raisons entrent en ligne de compte pour ce dépassement de coût. Il y
a eu beaucoup de quincaillerie qui s’est ajoutée au prix final. Il était difficile de faire une
évaluation précise au début de projet. Il y a eu aussi des problèmes de communications, au
moment de la commande avec les employés du magasin qui a résulté des coûts supplémentaires.
Il y a eu aussi des changements pour les matériaux utilisés, dus au manque d’expérience de
l’équipe. La partie pneumatique a dépassé les coûts estimés également, car toute la quincaillerie
coûte très cher et il en fallait beaucoup. La liste détaillée des éléments du budget est présentée en
annexe C.
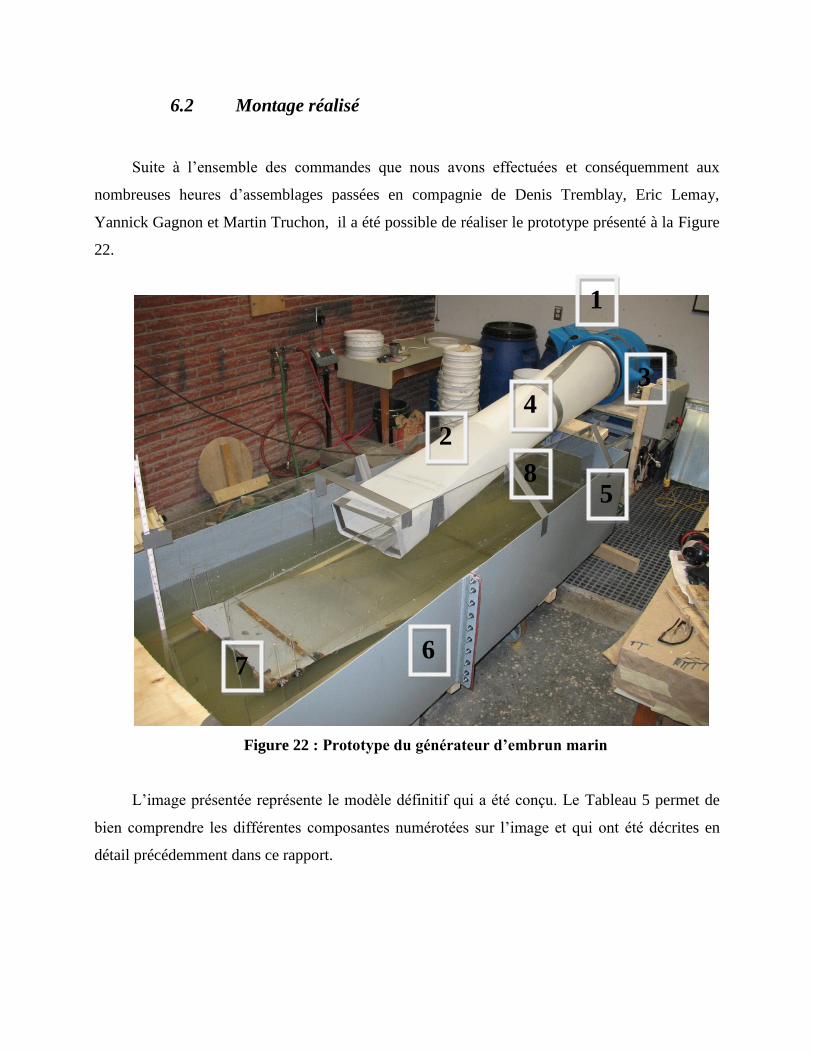
6.2 Montage réalisé
Suite à l’ensemble des commandes que nous avons effectuées et conséquemment aux
nombreuses heures d’assemblages passées en compagnie de Denis Tremblay, Eric Lemay,
Yannick Gagnon et Martin Truchon, il a été possible de réaliser le prototype présenté à la Figure
22.
Figure 22 : Prototype du générateur d’embrun marin
L’image présentée représente le modèle définitif qui a été conçu. Le Tableau 5 permet de
bien comprendre les différentes composantes numérotées sur l’image et qui ont été décrites en
détail précédemment dans ce rapport.
1
2
2
2
3
5
6 7
8
4
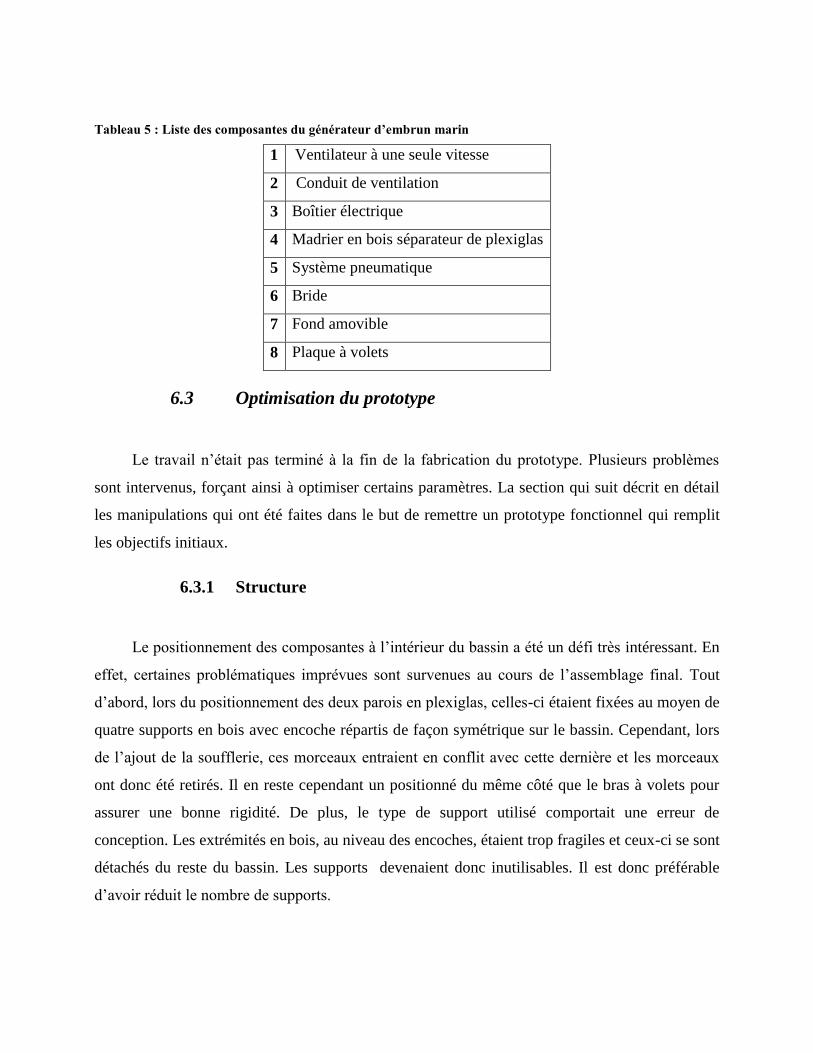
Tableau 5 : Liste des composantes du générateur d’embrun marin
1 <n Ventilateur à une seule vitesse
2 Conduit de ventilation
3 Boîtier électrique
4 Madrier en bois séparateur de plexiglas
5 Système pneumatique
6 Bride
7 Fond amovible
8 Plaque à volets
6.3 Optimisation du prototype
Le travail n’était pas terminé à la fin de la fabrication du prototype. Plusieurs problèmes
sont intervenus, forçant ainsi à optimiser certains paramètres. La section qui suit décrit en détail
les manipulations qui ont été faites dans le but de remettre un prototype fonctionnel qui remplit
les objectifs initiaux.
6.3.1 Structure
Le positionnement des composantes à l’intérieur du bassin a été un défi très intéressant. En
effet, certaines problématiques imprévues sont survenues au cours de l’assemblage final. Tout
d’abord, lors du positionnement des deux parois en plexiglas, celles-ci étaient fixées au moyen de
quatre supports en bois avec encoche répartis de façon symétrique sur le bassin. Cependant, lors
de l’ajout de la soufflerie, ces morceaux entraient en conflit avec cette dernière et les morceaux
ont donc été retirés. Il en reste cependant un positionné du même côté que le bras à volets pour
assurer une bonne rigidité. De plus, le type de support utilisé comportait une erreur de
conception. Les extrémités en bois, au niveau des encoches, étaient trop fragiles et ceux-ci se sont
détachés du reste du bassin. Les supports devenaient donc inutilisables. Il est donc préférable
d’avoir réduit le nombre de supports.

Par ailleurs, lors de la génération de vagues, les pressions exercées sur les parois en
plexiglas portaient à les déformer ce qui causait des irrégularités. Comme les parois étaient
retenues seulement de façon ponctuelle dans le haut et dans le bas, il s’est avéré nécessaire de
trouver une solution permettant de diminuer la flèche en chaque point. Pour ce faire, un profilé en
aluminium 6061-T6 a été fixé aux plexiglas sur toute leur longueur. Cette amélioration a réduit
de façon significative les déformations dans le plexiglas pour toute la zone qui risquait d’affecter
les dimensions des vagues.
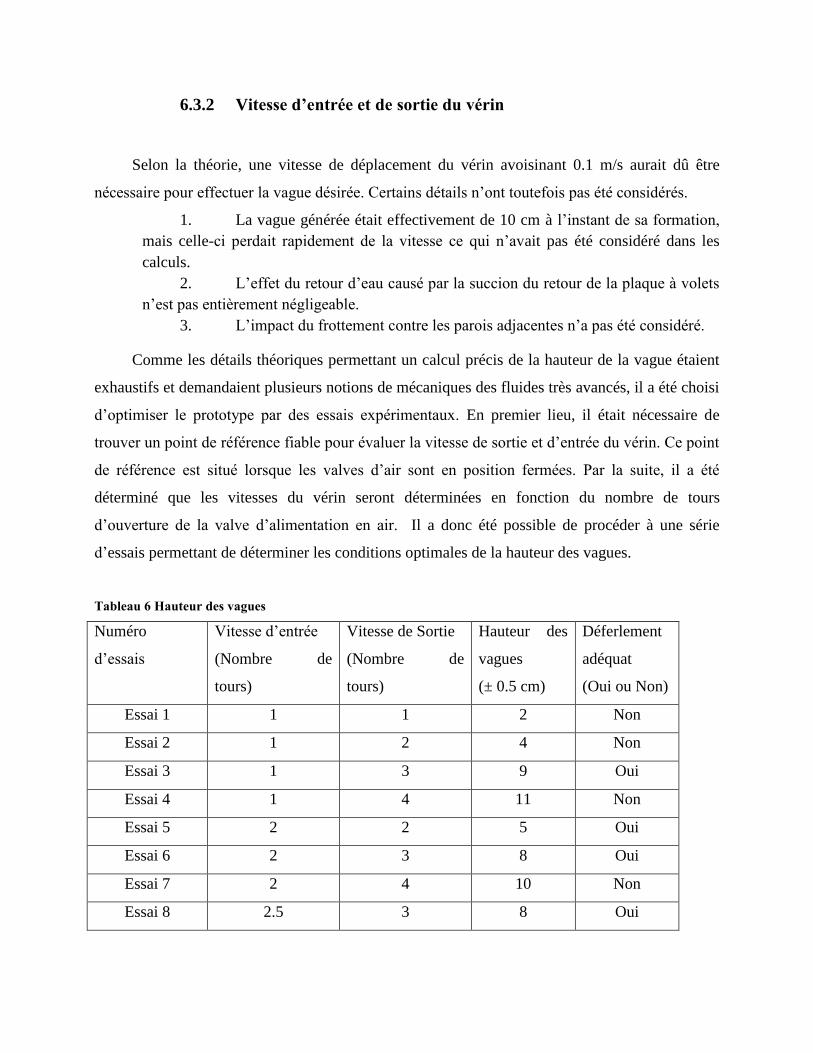
6.3.2 Vitesse d’entrée et de sortie du vérin
Selon la théorie, une vitesse de déplacement du vérin avoisinant 0.1 m/s aurait dû être
nécessaire pour effectuer la vague désirée. Certains détails n’ont toutefois pas été considérés.
1. La vague générée était effectivement de 10 cm à l’instant de sa formation,
mais celle-ci perdait rapidement de la vitesse ce qui n’avait pas été considéré dans les
calculs.
2. L’effet du retour d’eau causé par la succion du retour de la plaque à volets
n’est pas entièrement négligeable.
3. L’impact du frottement contre les parois adjacentes n’a pas été considéré.
Comme les détails théoriques permettant un calcul précis de la hauteur de la vague étaient
exhaustifs et demandaient plusieurs notions de mécaniques des fluides très avancés, il a été choisi
d’optimiser le prototype par des essais expérimentaux. En premier lieu, il était nécessaire de
trouver un point de référence fiable pour évaluer la vitesse de sortie et d’entrée du vérin. Ce point
de référence est situé lorsque les valves d’air sont en position fermées. Par la suite, il a été
déterminé que les vitesses du vérin seront déterminées en fonction du nombre de tours
d’ouverture de la valve d’alimentation en air. Il a donc été possible de procéder à une série
d’essais permettant de déterminer les conditions optimales de la hauteur des vagues.
Tableau 6 Hauteur des vagues
Numéro
d’essais
Vitesse d’entrée
(Nombre de
tours)
Vitesse de Sortie
(Nombre de
tours)
Hauteur des
vagues
(± 0.5 cm)
Déferlement
adéquat
(Oui ou Non)
Essai 1 1 1 2 Non
Essai 2 1 2 4 Non
Essai 3 1 3 9 Oui
Essai 4 1 4 11 Non
Essai 5 2 2 5 Oui
Essai 6 2 3 8 Oui
Essai 7 2 4 10 Non
Essai 8 2.5 3 8 Oui
Suite aux essais, quatre combinaisons d’entrée et de sortie d’air permettent l’obtention de
vagues ayant un déferlement satisfaisant aux exigences. Cependant, l’essai 5 est rejeté dût à une
trop faible hauteur de vague. Une seule des trois combinaisons restantes générait des vagues
constantes autant en termes de vitesse, de proportions et de point de déferlement. En effet, lors de
l’essai 8, non seulement les vagues générées étaient constantes, mais il s’agissait de la vitesse de
production des vagues la plus élevée qui a été atteinte, soit une vague produite toutes les 2/3 de
secondes. C’est pourquoi, même si cette vague est légèrement inférieure à ce qui était prévu lors
des objectifs, cette configuration a été retenue. La hauteur de la vague est mesurée en fonction
d’un point de référence correspondant à la hauteur de l’eau à l’état initial comme illustrée à la
Figure 23. Elle représente une vague l’instant précédent son déferlement. À l’aide de la règle en
arrière-plan, il est donc possible d’en mesurer la hauteur.
Figure 23 et Figure 24 : Mesure de la hauteur de vague
6.3.3 Course du vérin
Plusieurs essais ont été effectués pour améliorer la forme de la vague produite au point de
déferlement, dont la distance de course du vérin. Les capteurs magnétiques installés sur le vérin
dictant le début et la fin de course ont été déplacés afin de voir les résultats. Théoriquement, il a
été établi que la course idéale sans perte d’eau serait de 10 cm. Les essais ont donc débuté avec
cette valeur. Les résultats obtenus étaient peu convaincants avec une telle distance. Il a été
remarqué que les volets prenaient un certain temps avant de reprendre leur position initiale.
Ainsi, la distance a donc été augmentée pour les essais suivants. Les principaux aspects
considérés comme gage de comparaison étaient donc la forme de la vague et le déferlement de la
crête. Le déferlement a commencé à se produire avec des distances aux alentours de 16 cm. La
forme de vague idéale a été obtenue avec une course de 21 cm, soit 1,86 cm de moins que la
course maximale du piston. Ce jeu a été placé dans le sens où la décélération était la plus grande,
donc en poussée afin de minimiser les impacts au sein du vérin. Dans les conditions de vitesses
établies plus haut et une distance de course de 21 cm, une vague est générée à tous les 2/3 de
secondes.
6.3.4 Hauteur du fond amovible
Suite aux deux séries d’essais précédentes, la vague générée était optimale. Cependant, il
était nécessaire de modifier la hauteur du fond amovible, car lors du déferlement de la vague des
éclaboussures indésirables étaient produites et celles-ci interféraient avec l’embrun marin. Cela
pouvait fausser les résultats. Les résultats ont toutefois été jugés arbitrairement en fonction du
bon sens et dans le but d’optimiser les opérations. Dans ce sens, trois essais ont été effectués avec
les positions du fond amovible soit :
Cas 1 : Fond positionné 3 cm sous la surface de l’eau
Cas 2 : Fond positionné 3 cm au dessus de la surface de l’eau
Cas 3 : Fond positionné égal à la surface de l’eau

Cas 1 :
Les résultats dans cette position étaient négatifs pour deux raisons. À priori, le point de
déferlement de la vague n’était plus constant et sa position variait de façon aléatoire. Pour éviter
ce problème, il aurait été possible d’effectuer des essais supplémentaires avec une légère
augmentation de la hauteur, mais le second problème observé a mis fin aux essais. A posteriori,
lorsque le fond amovible était sous la surface de l’eau, une résonance des vagues revenait dans le
bassin principal, causant de l’interférence avec les principales vagues générées. En somme, les
résultats obtenus n’étaient pas souhaitables.
Cas 2 :
Dans cette position, le résultat obtenu était négatif pour une seule raison; le déferlement des
vagues était généré trop près du fond et celles-ci déferlaient et entraient en contact direct avec le
fond rigide. Selon Newton et son principe d’action-réaction, l’impact de la vague avec une plaque
rigide engendrait des éclaboussures indésirables qui étaient la cause de l’origine de ces tests. Le
cas 2 est donc considéré comme non désirable.
Cas 3 :
Le résultat obtenu était positif. Les vagues générées déferlaient approximativement 15 cm
avant d’atteindre le plateau à la surface de l’eau. Par conséquent, les éclaboussures engendrées
étaient négligeables. De plus, le niveau de l’eau situé après le plateau se retrouvait légèrement
plus bas par rapport à la zone où il y a déferlement. Donc, la résonance engendrée par les vagues
précédentes n’entre jamais en contact avec les vagues produites, car elles étaient arrêtées par le
fond amovible. Cette hauteur a donc été considérée comme optimale.

6.3.5 Hauteur de la soufflerie
Avec la configuration et la longueur du canal de ventilation, l’endroit optimal est au-dessus
du vérin. Une hauteur de 12 cm a été sélectionnée pour laisser un jeu pour le mouvement du bras
amovible. Un panneau de contreplaqué a été fixé à cette hauteur. Des essais ont été effectués à
cette hauteur. Pour avoir une idée de grandeur des gouttelettes, elles ont été mesurées de façon
préliminaire à l’aide de lunettes de sécurités. Cet essai a démontré que l’angle d’attaque sur la
crête de la vague était trop agressif. Étant donné que base de la soufflerie ne pouvait pas
descendre plus, la soufflerie a été installée sur le côté pour diminuer sa hauteur. Un autre essai
préliminaire a été effectué et a démontré que cette hauteur était adéquate. Il faut mentionner que
la situation est un cas limite, car le tunnel de ventilation ne peut pas être à la même hauteur du
sommet de la vague.

6.3.6 Résumé des paramètres optimaux retenus
Suite à tous les essais réalisés, plusieurs paramètres ont été optimisés. Ils sont décrits plus
bas pour permettre la reproductibilité de ces paramètres. Le mouvement d’ajustement des valves
a été bloqué aux paramètres optimaux qui sont les suivants.
Vitesse de sortie : 3 tours (se référé à la Figure 25)
Vitesse d’entrée : 2.5 tours (se référé à la Figure 25)
Course du vérin : 21 cm à partir du fond du vérin (se référé à la Figure 25)
Figure 25 Paramètres optimaux du vérin
Ajustement de la hauteur du fond amovible :
doit se situer à la même hauteur que celle de l’eau lorsqu’elle est sans
mouvement.
Ajustement de la hauteur de la soufflerie :
le bas du tunnel de la soufflerie doit être à une distance d’un centimètre au
dessus de la crête de la vague
7 Essais, résultats et analyse
7.1 Vagues générées
Dans le but d’évaluer correctement les paramètres des vagues obtenues, une analyse vidéo
de type image par image a été utilisée. Avec une caméra numérique normale, permettant
d’enregistrer jusqu’à 30 images par seconde, il a été possible de déterminer la vitesse d’avance de
la vague ainsi que sa hauteur en trois points.
1. Au moment de la génération : Il s’agit des vagues à l’instant où
celles-ci ne sont plus en contact avec la plaque à volets.
2. Au milieu du parcours : Il s’agit du moment où la vague rencontre
le début du fond amovible.
3. L’instant précédent le déferlement : Il s’agit du maximum de
hauteur observée dans les derniers 10 cm avant le déferlement.
Les mesures ont été prises perpendiculairement à une surface étalonnée permettant de
mesurer la distance parcourue ou bien la hauteur en cm avec une précision de ±0.5 cm comme
illustrée sur la Figure 26 . Cette hauteur est mesurée par rapport à une ligne de référence
correspondant au niveau initial de l’eau lorsqu’elle est stagnante.
Figure 26 : Exemple de mesure de hauteur de vague
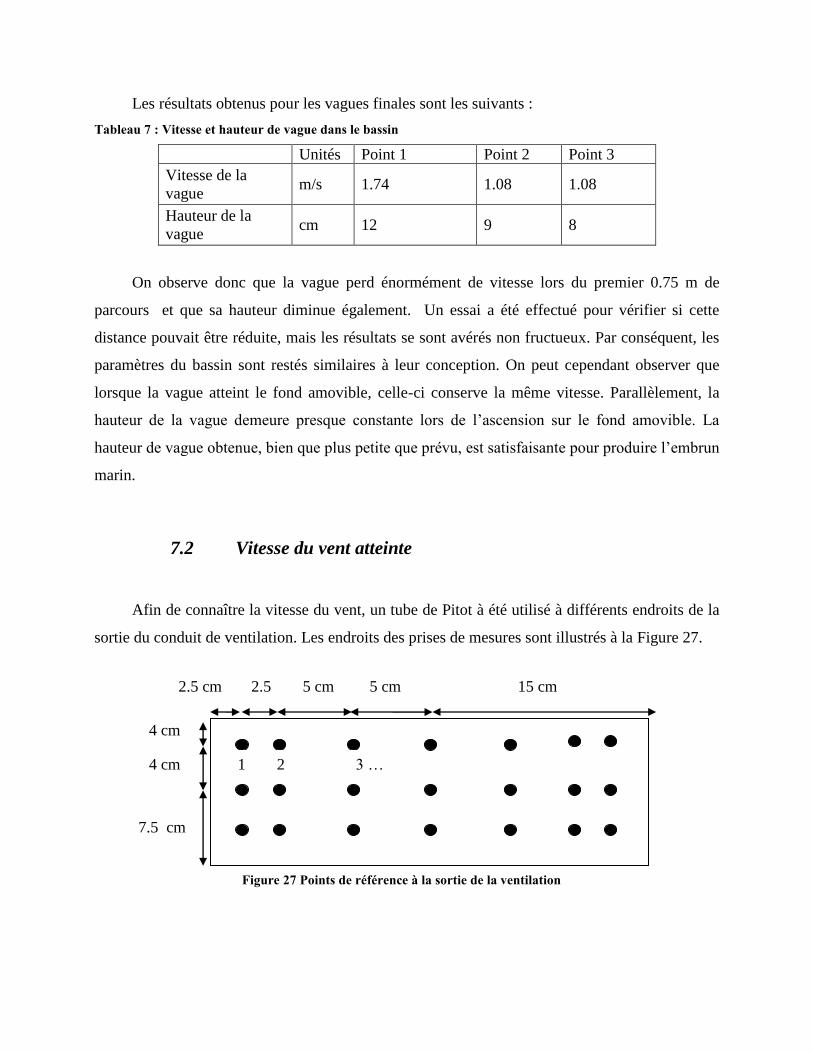
Les résultats obtenus pour les vagues finales sont les suivants :
Tableau 7 : Vitesse et hauteur de vague dans le bassin
Unités Point 1 Point 2 Point 3
Vitesse de la
vague m/s 1.74 1.08 1.08
Hauteur de la
vague cm 12 9 8
On observe donc que la vague perd énormément de vitesse lors du premier 0.75 m de
parcours et que sa hauteur diminue également. Un essai a été effectué pour vérifier si cette
distance pouvait être réduite, mais les résultats se sont avérés non fructueux. Par conséquent, les
paramètres du bassin sont restés similaires à leur conception. On peut cependant observer que
lorsque la vague atteint le fond amovible, celle-ci conserve la même vitesse. Parallèlement, la
hauteur de la vague demeure presque constante lors de l’ascension sur le fond amovible. La
hauteur de vague obtenue, bien que plus petite que prévu, est satisfaisante pour produire l’embrun
marin.
7.2 Vitesse du vent atteinte
Afin de connaître la vitesse du vent, un tube de Pitot à été utilisé à différents endroits de la
sortie du conduit de ventilation. Les endroits des prises de mesures sont illustrés à la Figure 27.
15 cm 5 cm 5 cm 2.5
cm
2.5 cm
4 cm
4 cm
7.5 cm
1 2 3 …
Figure 27 Points de référence à la sortie de la ventilation
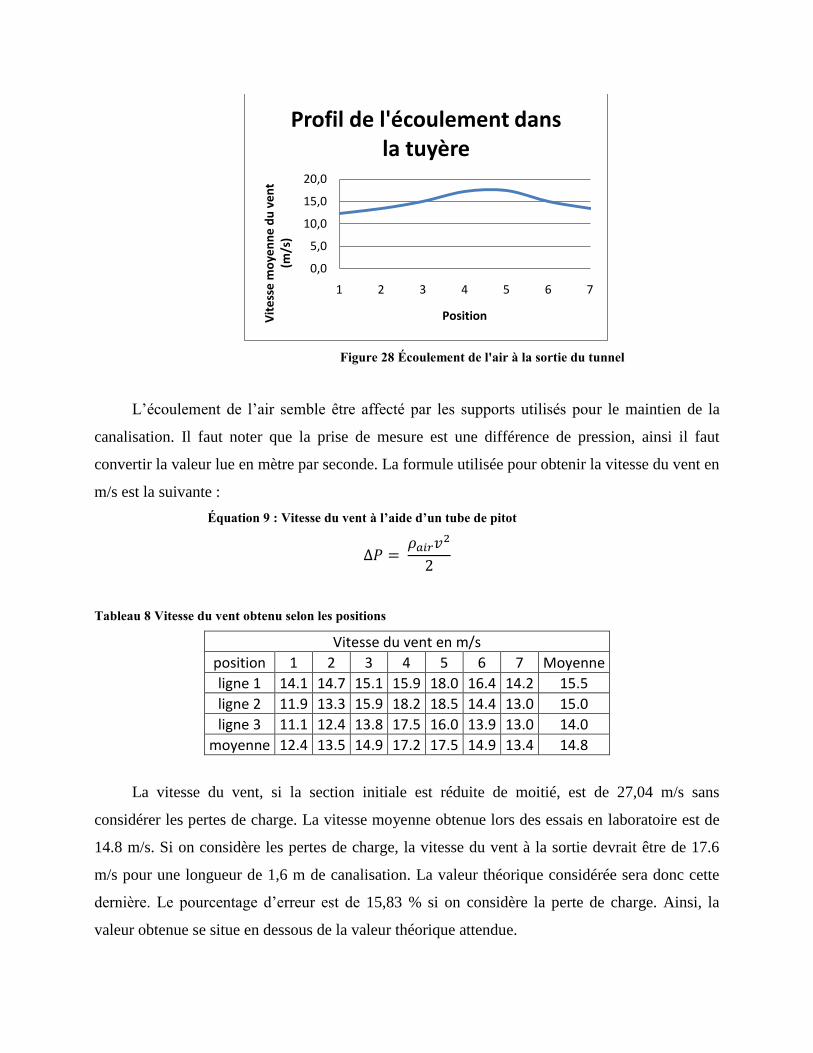
Figure 28 Écoulement de l'air à la sortie du tunnel
L’écoulement de l’air semble être affecté par les supports utilisés pour le maintien de la
canalisation. Il faut noter que la prise de mesure est une différence de pression, ainsi il faut
convertir la valeur lue en mètre par seconde. La formule utilisée pour obtenir la vitesse du vent en
m/s est la suivante :
Équation 9 : Vitesse du vent à l’aide d’un tube de pitot
Tableau 8 Vitesse du vent obtenu selon les positions
Vitesse du vent en m/s
position 1 2 3 4 5 6 7 Moyenne
ligne 1 14.1 14.7 15.1 15.9 18.0 16.4 14.2 15.5
ligne 2 11.9 13.3 15.9 18.2 18.5 14.4 13.0 15.0
ligne 3 11.1 12.4 13.8 17.5 16.0 13.9 13.0 14.0
moyenne 12.4 13.5 14.9 17.2 17.5 14.9 13.4 14.8
La vitesse du vent, si la section initiale est réduite de moitié, est de 27,04 m/s sans
considérer les pertes de charge. La vitesse moyenne obtenue lors des essais en laboratoire est de
14.8 m/s. Si on considère les pertes de charge, la vitesse du vent à la sortie devrait être de 17.6
m/s pour une longueur de 1,6 m de canalisation. La valeur théorique considérée sera donc cette
dernière. Le pourcentage d’erreur est de 15,83 % si on considère la perte de charge. Ainsi, la
valeur obtenue se situe en dessous de la valeur théorique attendue.
0,0
5,0
10,0
15,0
20,0
1 2 3 4 5 6 7
Vit
ess
e m
oye
nn
e d
u v
en
t(m
/s)
Position
Profil de l'écoulement dans la tuyère
Les causes d’erreur peuvent s’expliquer par de nombreuses raisons. La prise de mesure était
une lecture prise à l’œil sur une échelle. Cela laisse place à des erreurs de l’ordre de ± 0,01 pouce
d’eau sur les mesures de la variation de la pression. Cela entraîne des valeurs de ± 2 m/s sur les
valeurs de vitesse du vent. Le conduit de ventilation a été fabriqué avec un type de plastique dont
le coefficient de Moody n’est pas déterminé. De plus, le changement de géométrie occasionne
des pertes de charge difficile à quantifier. Ainsi, la vitesse du vent est satisfaisante pour générer
un embrun, car la vitesse maximale observée est aux alentours de 17,6 m/s.
7.3 Diamètre des gouttelettes obtenues
Suite aux optimisations effectuées, il est possible de générer un embrun marin avec le
prototype réalisé. Ayant des vents avoisinant les 60 km/h et des vagues d’une hauteur de 8 cm, la
formation d’un embrun marin a été observée. Cependant, il est nécessaire de quantifier et de
catégoriser le diamètre des gouttelettes produites.
La méthode usuelle pour accomplir cette tâche est d’utiliser une plaque de verre recouverte
d’un mince filme d’huile synthétique à viscosité très élevée. Les gouttelettes sont donc capturées
dans l’huile et conservent leur sphéricité. Il est donc possible d’examiner la plaque en agrandi
afin de calculer le diamètre des gouttelettes.
Pour évaluer le diamètre, un microscope spécialisé en la matière est généralement utilisé.
Celui-ci permet de prendre une image rapidement de la plaque, ce qui diminue les risques
d’évaporation de l’eau permettant de conserver une population significative des petites gouttes.
L’analyse à l’aide d’un programme permet par la suite d’isoler les gouttes et d’en déterminer les
diamètres. Toutefois, l’appareil en question n’était pas disponible aux moments des
expérimentations. Afin de parvenir à évaluer de façon significative, mais avec un degré de
précision moindre le diamètre des gouttelettes, une procédure d’analyse d’image différente a dû
être établie.
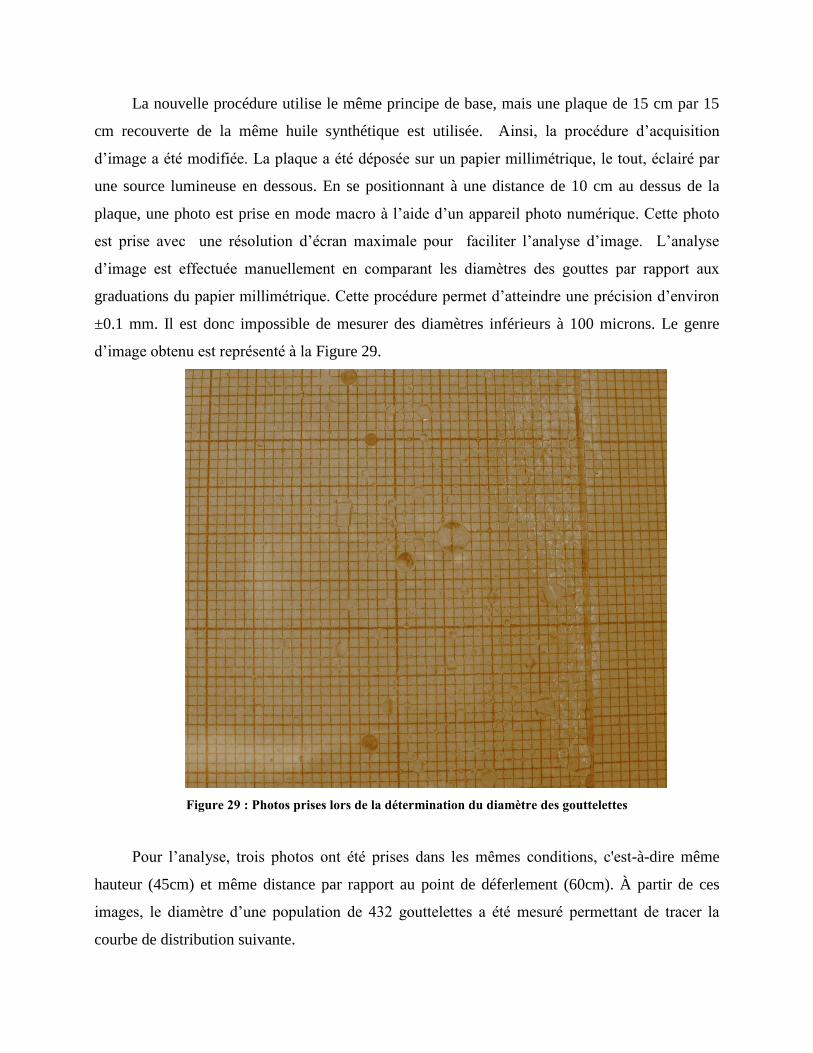
La nouvelle procédure utilise le même principe de base, mais une plaque de 15 cm par 15
cm recouverte de la même huile synthétique est utilisée. Ainsi, la procédure d’acquisition
d’image a été modifiée. La plaque a été déposée sur un papier millimétrique, le tout, éclairé par
une source lumineuse en dessous. En se positionnant à une distance de 10 cm au dessus de la
plaque, une photo est prise en mode macro à l’aide d’un appareil photo numérique. Cette photo
est prise avec une résolution d’écran maximale pour faciliter l’analyse d’image. L’analyse
d’image est effectuée manuellement en comparant les diamètres des gouttes par rapport aux
graduations du papier millimétrique. Cette procédure permet d’atteindre une précision d’environ
±0.1 mm. Il est donc impossible de mesurer des diamètres inférieurs à 100 microns. Le genre
d’image obtenu est représenté à la Figure 29.
Figure 29 : Photos prises lors de la détermination du diamètre des gouttelettes
Pour l’analyse, trois photos ont été prises dans les mêmes conditions, c'est-à-dire même
hauteur (45cm) et même distance par rapport au point de déferlement (60cm). À partir de ces
images, le diamètre d’une population de 432 gouttelettes a été mesuré permettant de tracer la
courbe de distribution suivante.
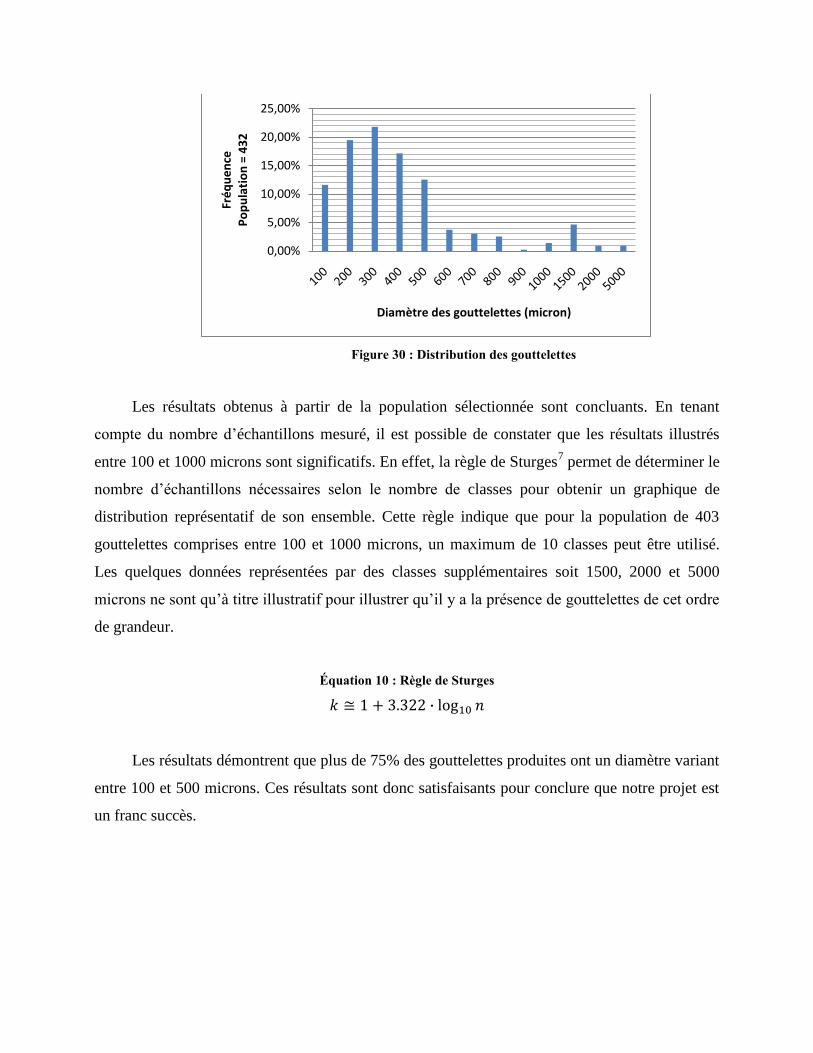
Figure 30 : Distribution des gouttelettes
Les résultats obtenus à partir de la population sélectionnée sont concluants. En tenant
compte du nombre d’échantillons mesuré, il est possible de constater que les résultats illustrés
entre 100 et 1000 microns sont significatifs. En effet, la règle de Sturges7 permet de déterminer le
nombre d’échantillons nécessaires selon le nombre de classes pour obtenir un graphique de
distribution représentatif de son ensemble. Cette règle indique que pour la population de 403
gouttelettes comprises entre 100 et 1000 microns, un maximum de 10 classes peut être utilisé.
Les quelques données représentées par des classes supplémentaires soit 1500, 2000 et 5000
microns ne sont qu’à titre illustratif pour illustrer qu’il y a la présence de gouttelettes de cet ordre
de grandeur.
Équation 10 : Règle de Sturges
Les résultats démontrent que plus de 75% des gouttelettes produites ont un diamètre variant
entre 100 et 500 microns. Ces résultats sont donc satisfaisants pour conclure que notre projet est
un franc succès.
0,00%
5,00%
10,00%
15,00%
20,00%
25,00%
Fré
qu
en
ceP
op
ula
tio
n =
43
2
Diamètre des gouttelettes (micron)
8 Respect de l’échéancier
En se basant sur l’échéancier de départ, certains délais ont pu être observés tout au long du
projet. Grâce à l’implication de tous les membres de l’équipe et le soutien du personnel
technique, ces délais ont toutefois été contrôlés de manière à produire un prototype viable. Les
dernières étapes d’optimisations ont eu lieu dans les temps prévus et ont été très instructives par
le fait même. S’il y a un point à soulever dans le respect des échéanciers, il faut mentionner les
quelques retards dans la remise des versions préliminaires des rapports. En effet, plusieurs
problèmes sont survenus dans la rédaction des rapports occasionnent ces dits retards. En somme,
les rapports ont tous été livré et les objectifs atteints dans les meilleurs délais réalisables. Si le
travail était à refaire, une meilleure ponctualité dans la remise des travaux devrait être observée.
9 Conclusion
Le prototype fabriqué satisfait l’ensemble des objectifs qui ont été déterminés par le
promoteur au cours du projet. Effectivement, en générant des vagues d’une hauteur de 8cm, et en
soufflant au point de déferlement avec des vents avoisinant les 60 km/h, il a été possible de
générer un embrun similaire à celui observé dans les conditions réelles en haute mer.
Le présent rapport est un résumé des étapes qui ont mené à la réalisation de ce prototype.
En effet, chacune de ces étapes a été nécessaire pour remettre un prototype de qualité au
promoteur. Par contre, plusieurs étapes supplémentaires seront nécessaires pour améliorer le
prototype et utiliser celui-ci dans les conditions extrêmes d’utilisation. Ces étapes sont énumérées
dans la section «recommandations».
Enfin, le générateur d’embrun marin permet d’obtenir des gouttelettes d’eaux salées en
suspension, mais celui-ci pourra servir comme prototype pour toute une autre gamme de projet.
Effectivement, la facilité de modification du prototype permettra de travailler sur plusieurs
projets se rattachant à la formation des vagues en haute mer ou bien sur la façon que celles-ci
vont de se briser.
10 Recommandations
Bassin
Peinturer le bassin et toutes les composantes métalliques avec une peinture résistance à
l’eau et à la corrosion
Isoler dans un compartiment étanche la zone du bras à volet pour éviter les éclaboussures
Poser un recouvrement à l’extrémité opposée au bras à volet pour éviter les éclaboussures
Faire la conception d’un support spécialisé pour ce bassin pour éviter les risques de le
positionner incorrectement après l’entreposage
Utiliser un contrepoids lorsque le bassin est vide lorsque les 3 compartiments sont
assemblés sur le chariot utilisé présentement. Mettre le contre poids du côté opposé du
vérin pour éviter un basculement accidentel.
Plaque à volet
Isoler la section pneumatique pour la protéger du givre.
Faire machiner deux patins de glissière d’une longueur de 12’’ en téflon de la même
dimension de la glissière. Ces patins rendraient le bras plus stable. De plus, ils seraient
moins fragiles aux chocs que ceux installés présentement.
Trouver un autre moyen pour assembler les membranes de caoutchouc pour éviter la
corrosion galvanique.
Ajuster la longueur du dernier volet pour qu’il soit plus près du fond.
Installer des roulettes sur les deux parties inférieures du bras pour éviter qu’il touche le
fond du bassin.
Ajuster les volets afin que ceux-ci soient parfaitement perpendiculaires au mouvement de
poussée
Soufflerie
Faire le conduit de ventilation en tôle pour assurer sa rigidité.
Donner un léger angle d’inclinaison à la sortie de la soufflerie pour que le vent sorte
parallèlement à la direction des vagues.
Obtenir un ventilateur avec gradateur pour modifier la vitesse du vent.
Optimisation supplémentaire
Faire passer la longueur du fond amovible de 1 m à 1,75 m.
Optimiser le volume d’eau du bassin
Optimiser l’aire de sortie du conduit de ventilation
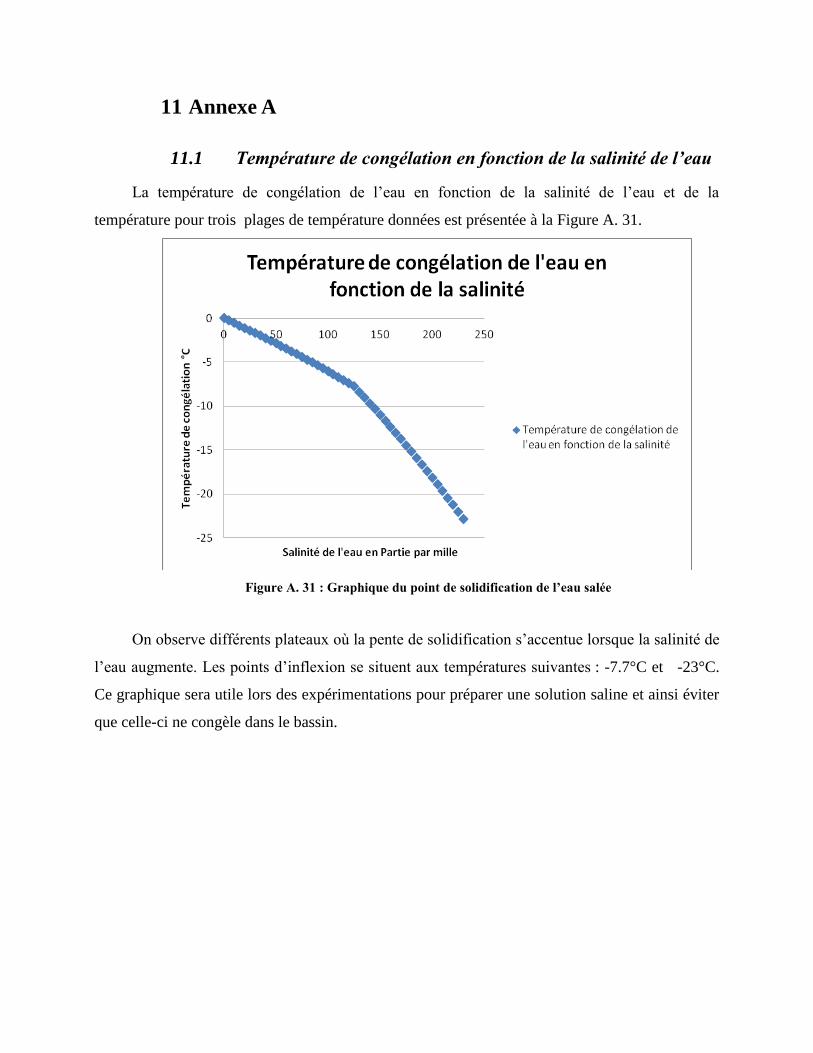
11 Annexe A
11.1 Température de congélation en fonction de la salinité de l’eau
La température de congélation de l’eau en fonction de la salinité de l’eau et de la
température pour trois plages de température données est présentée à la Figure A. 31.
Figure A. 31 : Graphique du point de solidification de l’eau salée
On observe différents plateaux où la pente de solidification s’accentue lorsque la salinité de
l’eau augmente. Les points d’inflexion se situent aux températures suivantes : -7.7°C et -23°C.
Ce graphique sera utile lors des expérimentations pour préparer une solution saline et ainsi éviter
que celle-ci ne congèle dans le bassin.

11.2 Temps de refroidissement de la masse d’eau
Comme l’eau salée présente dans le bassin est utilisée pour plusieurs séries
d’expérimentations et que ces expérimentations peuvent être étalées sur plusieurs jours et/ou
semaines. Il est plausible de supposer que le bassin sortira de la chambre froide à l’occasion. Ce
qui entraîne une augmentation de la température de l’eau pouvant atteindre jusqu’à la température
de la pièce d’entreposage.
Étant donné que les essais doivent être réalisés avec de l’eau sous le point de congélation
(0°C), il est nécessaire de calculer le temps d’attente requis entre le moment où le bassin pénètre
dans la chambre froide et celui où l’eau est à la bonne température pour effectuer les essais. Afin
de calculer de façon rapide et relativement précise, certaines hypothèses de calcul ont été émises.
Hypothèse 1 : Seul le transfert de chaleur par conduction et celui par convection ont été
considérés.
Hypothèse 2 : La température de la chambre froide a été supposée à -20°C alors que la
température initiale de l’eau est supposée à 20°C
Hypothèse 3 : Le volume d’eau a été considéré comme étant un prisme rectangulaire et possédant
les dimensions suivantes : 0.3m x 0.85m x 2.7m
Hypothèse 4 : Les calculs sont basés sur un cas de transfert de chaleur 2D. Les transferts de
chaleurs aux extrémités les plus éloignées ne sont pas considérés.
Hypothèse 51 : Les parois du bassin sont supposées être instantanément à la température de la
chambre froide lorsque le bassin y pénètre.
Hypothèse 6 : Seule la convection forcée a été considérée lors des calculs
Hypothèse 72 : La vitesse de déplacement de l’air a été considérée longitudinale à la surface et
celle-ci est approximée à 2.5 m/s.
Hypothèse 82
: L’extraction de chaleur par convection n’a pas été considérée pour la section
située sous le bassin.
1 S’applique uniquement pour le cas de transfert de chaleur par conduction
2 S’applique uniquement pour le cas de transfert de chaleur par convection
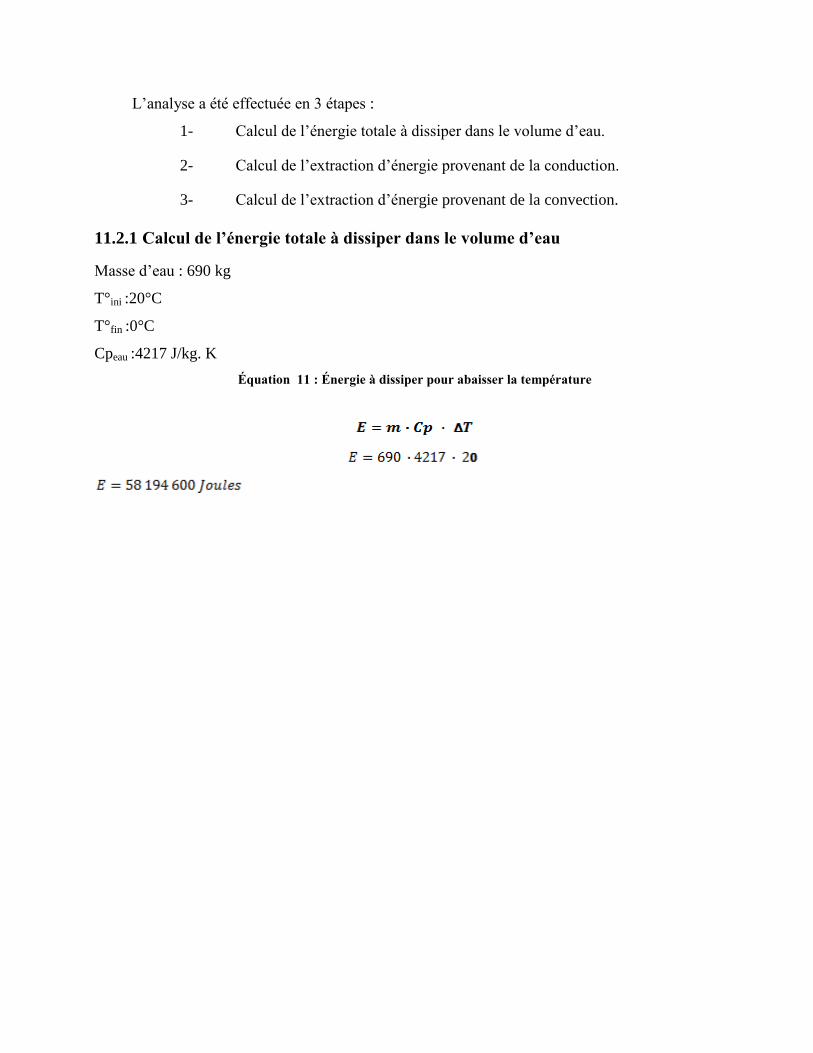
L’analyse a été effectuée en 3 étapes :
1- Calcul de l’énergie totale à dissiper dans le volume d’eau.
2- Calcul de l’extraction d’énergie provenant de la conduction.
3- Calcul de l’extraction d’énergie provenant de la convection.
11.2.1 Calcul de l’énergie totale à dissiper dans le volume d’eau
Masse d’eau : 690 kg
T°ini :20°C
T°fin :0°C
Cpeau :4217 J/kg. K
Équation 11 : Énergie à dissiper pour abaisser la température
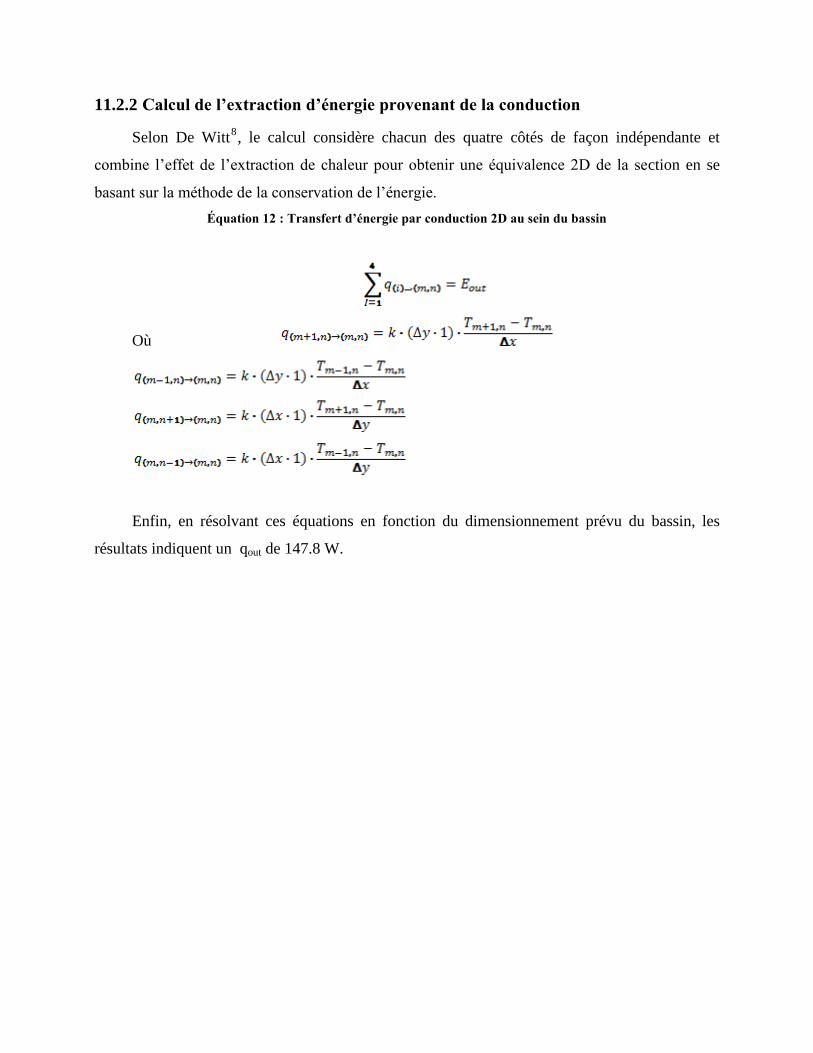
11.2.2 Calcul de l’extraction d’énergie provenant de la conduction
Selon De Witt8, le calcul considère chacun des quatre côtés de façon indépendante et
combine l’effet de l’extraction de chaleur pour obtenir une équivalence 2D de la section en se
basant sur la méthode de la conservation de l’énergie.
Équation 12 : Transfert d’énergie par conduction 2D au sein du bassin
Où
Enfin, en résolvant ces équations en fonction du dimensionnement prévu du bassin, les
résultats indiquent un qout de 147.8 W.

11.2.3 Calcul de l’extraction d’énergie provenant de la convection
Selon Çengel, la quantité d’énergie extraite par convection dépend d’un coefficient h qui
varie en fonction du cas. Cependant, la quantité d’énergie extraite peut être calculée à l’aide
l’Équation 13.
Équation 13 : Transfert d’énergie par convection
Sachant que les données de l’air pour le système sont les suivantes :
ρ=1.222 kg/m3
Cp= 1006 J/kg K
K=0.02425
α=1.905x10-5
Pr=0.7320
ν=1,426x10-5
En utilisant l’équation de Reynolds, ainsi que la vitesse d’hypothèse de l’air sur les parois
du bassin. L’écoulement est considéré comme turbulent. Il est donc nécessaire d’utiliser
l’Équation 14, permettant de trouver la valeur de h correspondant au cas étudié.
Équation 14 : Nombre de Nusselt pour un écoulement turbulent
En résolvant cette équation, la valeur de h ainsi obtenue est de 10.17. Cela dit, la somme
d’extraction d’énergie par convection calculée pour les différents côtés est de 1769 Watts.
11.2.4 Temps de refroidissement de l’eau
Sachant que 147.8 W sont extraits par conduction et 1769 W par convection. Un total de
1917 W sont extraits du bassin. Comme calculés précédemment, plus de 58 mégajoules doivent
être retirés du système ce qui s’accomplira en 30 360 secondes. Il sera donc nécessaire de prévoir
environ 8.5 heures pour atteindre la température nécessaire aux expérimentations.
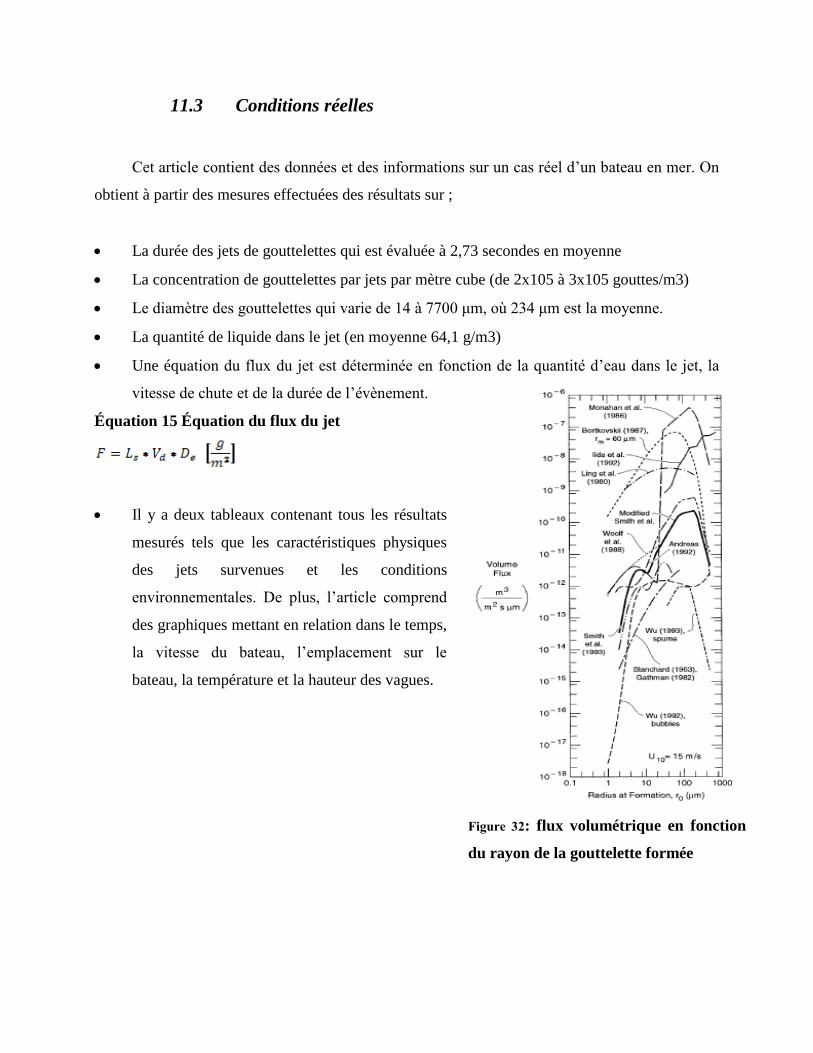
11.3 Conditions réelles
Cet article contient des données et des informations sur un cas réel d’un bateau en mer. On
obtient à partir des mesures effectuées des résultats sur ;
La durée des jets de gouttelettes qui est évaluée à 2,73 secondes en moyenne
La concentration de gouttelettes par jets par mètre cube (de 2x105 à 3x105 gouttes/m3)
Le diamètre des gouttelettes qui varie de 14 à 7700 μm, où 234 μm est la moyenne.
La quantité de liquide dans le jet (en moyenne 64,1 g/m3)
Une équation du flux du jet est déterminée en fonction de la quantité d’eau dans le jet, la
vitesse de chute et de la durée de l’évènement.
Équation 15 Équation du flux du jet
Il y a deux tableaux contenant tous les résultats
mesurés tels que les caractéristiques physiques
des jets survenues et les conditions
environnementales. De plus, l’article comprend
des graphiques mettant en relation dans le temps,
la vitesse du bateau, l’emplacement sur le
bateau, la température et la hauteur des vagues.
Figure 32: flux volumétrique en fonction
du rayon de la gouttelette formée
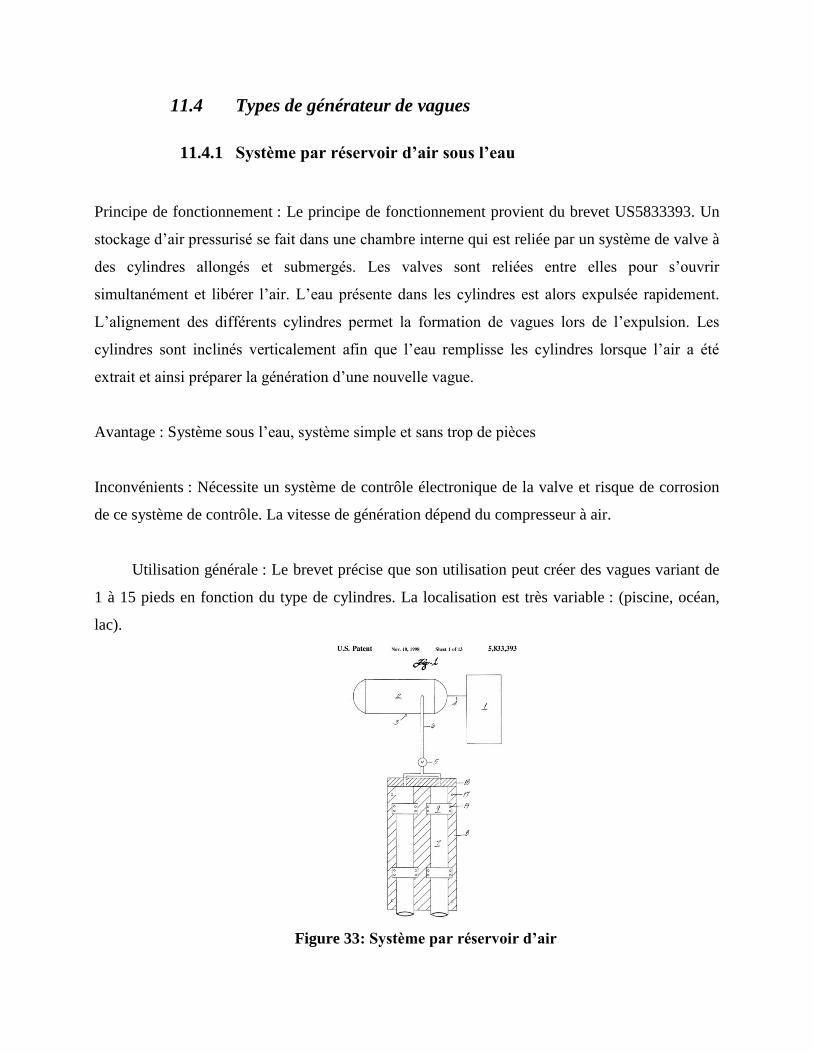
11.4 Types de générateur de vagues
11.4.1 Système par réservoir d’air sous l’eau
Principe de fonctionnement : Le principe de fonctionnement provient du brevet US5833393. Un
stockage d’air pressurisé se fait dans une chambre interne qui est reliée par un système de valve à
des cylindres allongés et submergés. Les valves sont reliées entre elles pour s’ouvrir
simultanément et libérer l’air. L’eau présente dans les cylindres est alors expulsée rapidement.
L’alignement des différents cylindres permet la formation de vagues lors de l’expulsion. Les
cylindres sont inclinés verticalement afin que l’eau remplisse les cylindres lorsque l’air a été
extrait et ainsi préparer la génération d’une nouvelle vague.
Avantage : Système sous l’eau, système simple et sans trop de pièces
Inconvénients : Nécessite un système de contrôle électronique de la valve et risque de corrosion
de ce système de contrôle. La vitesse de génération dépend du compresseur à air.
Utilisation générale : Le brevet précise que son utilisation peut créer des vagues variant de
1 à 15 pieds en fonction du type de cylindres. La localisation est très variable : (piscine, océan,
lac).
Figure 33: Système par réservoir d’air
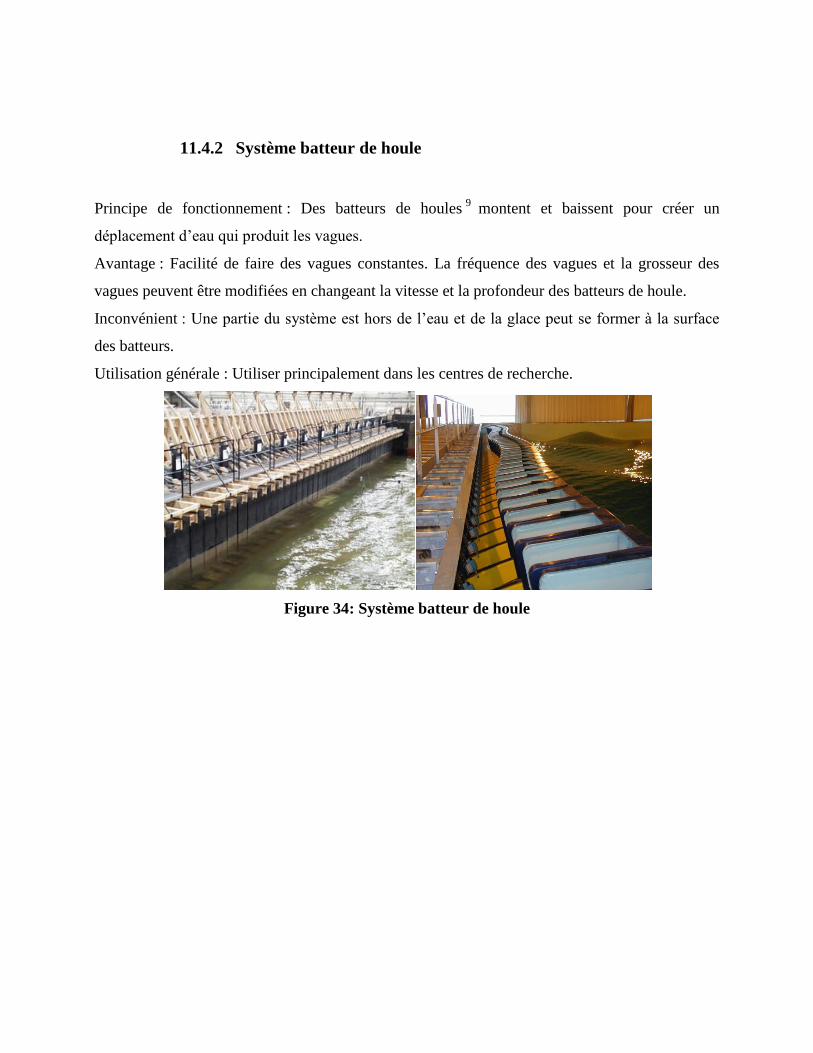
11.4.2 Système batteur de houle
Principe de fonctionnement : Des batteurs de houles9
montent et baissent pour créer un
déplacement d’eau qui produit les vagues.
Avantage : Facilité de faire des vagues constantes. La fréquence des vagues et la grosseur des
vagues peuvent être modifiées en changeant la vitesse et la profondeur des batteurs de houle.
Inconvénient : Une partie du système est hors de l’eau et de la glace peut se former à la surface
des batteurs.
Utilisation générale : Utiliser principalement dans les centres de recherche.
Figure 34: Système batteur de houle
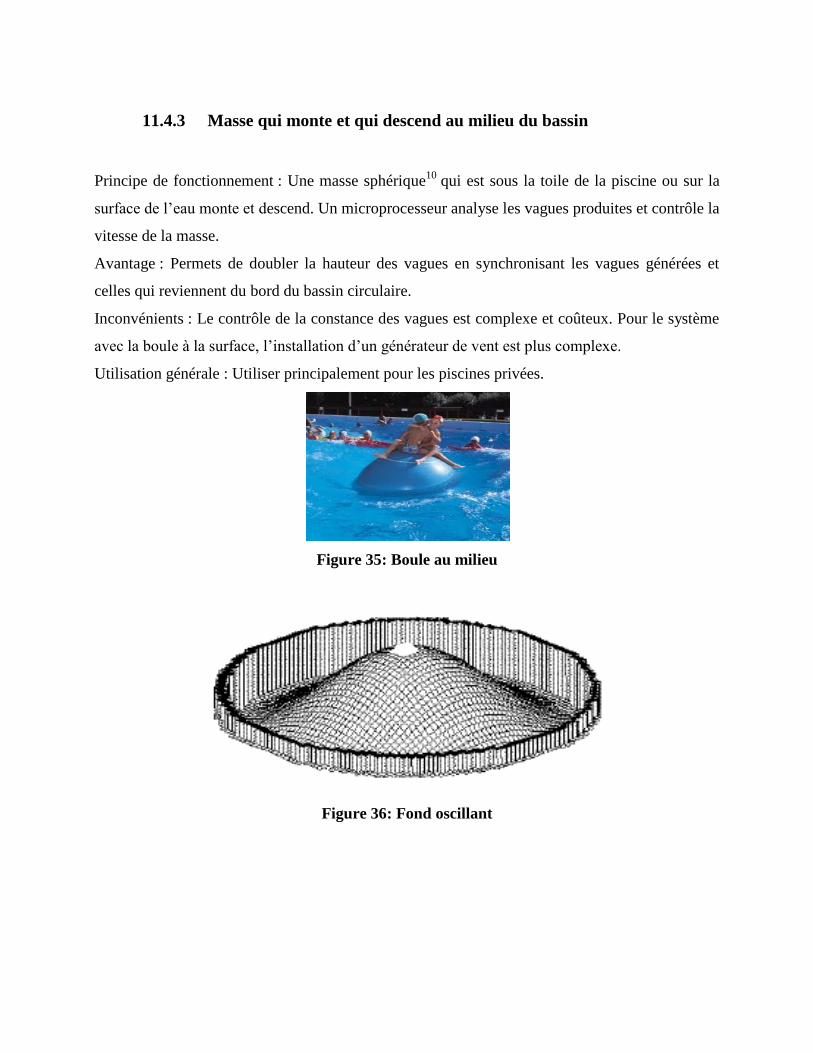
11.4.3 Masse qui monte et qui descend au milieu du bassin
Principe de fonctionnement : Une masse sphérique10
qui est sous la toile de la piscine ou sur la
surface de l’eau monte et descend. Un microprocesseur analyse les vagues produites et contrôle la
vitesse de la masse.
Avantage : Permets de doubler la hauteur des vagues en synchronisant les vagues générées et
celles qui reviennent du bord du bassin circulaire.
Inconvénients : Le contrôle de la constance des vagues est complexe et coûteux. Pour le système
avec la boule à la surface, l’installation d’un générateur de vent est plus complexe.
Utilisation générale : Utiliser principalement pour les piscines privées.
Figure 35: Boule au milieu
Figure 36: Fond oscillant
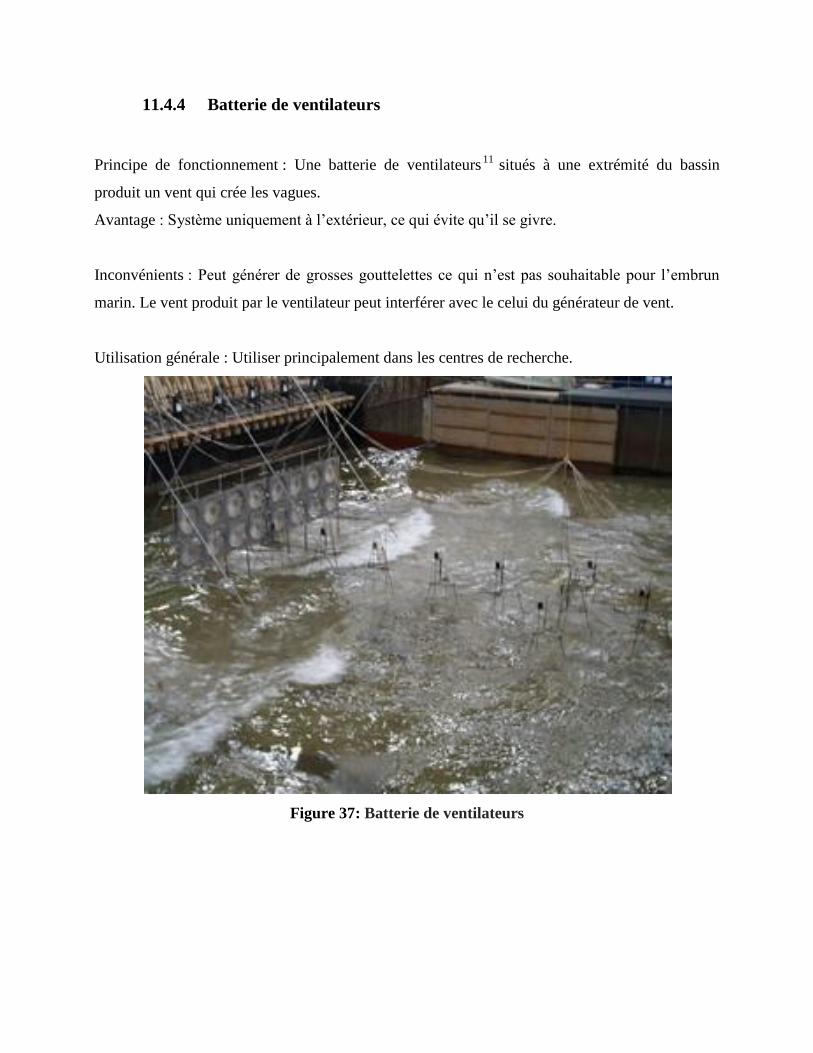
11.4.4 Batterie de ventilateurs
Principe de fonctionnement : Une batterie de ventilateurs11
situés à une extrémité du bassin
produit un vent qui crée les vagues.
Avantage : Système uniquement à l’extérieur, ce qui évite qu’il se givre.
Inconvénients : Peut générer de grosses gouttelettes ce qui n’est pas souhaitable pour l’embrun
marin. Le vent produit par le ventilateur peut interférer avec le celui du générateur de vent.
Utilisation générale : Utiliser principalement dans les centres de recherche.
Figure 37: Batterie de ventilateurs

11.4.5 Système d’une vague continue
Principe de fonctionnement : Ce type de générateur12
ne génère aucune vague a proprement parlé
toutefois, il déplace l’eau d’une façon à ce que celle-ci prenne la forme d’une vague. Une masse
d’eau circule sur une surface ayant une forme prédéfinie pour obtenir la hauteur de vague désirée.
Avantage : Très peu de composantes. Le système fonctionne facilement en circuit fermé, la vague
généré est uniforme, constante et continue.
Inconvénient : Difficile de modifier la hauteur de vague sans redimensionner un nouveau bassin à
l’exception d’une modification du débit. Création d’un remous permanent en surface. La vague
générée n’est pas identique aux conditions de la mer.
Utilisation générale : Ce système est utilisé pour favoriser l’apprentissage des surfeurs en créant
des conditions semblables aux vagues de l’océan. Il peut générer des vagues en tunnel de
plusieurs pieds.
Figure 38: Vague continue
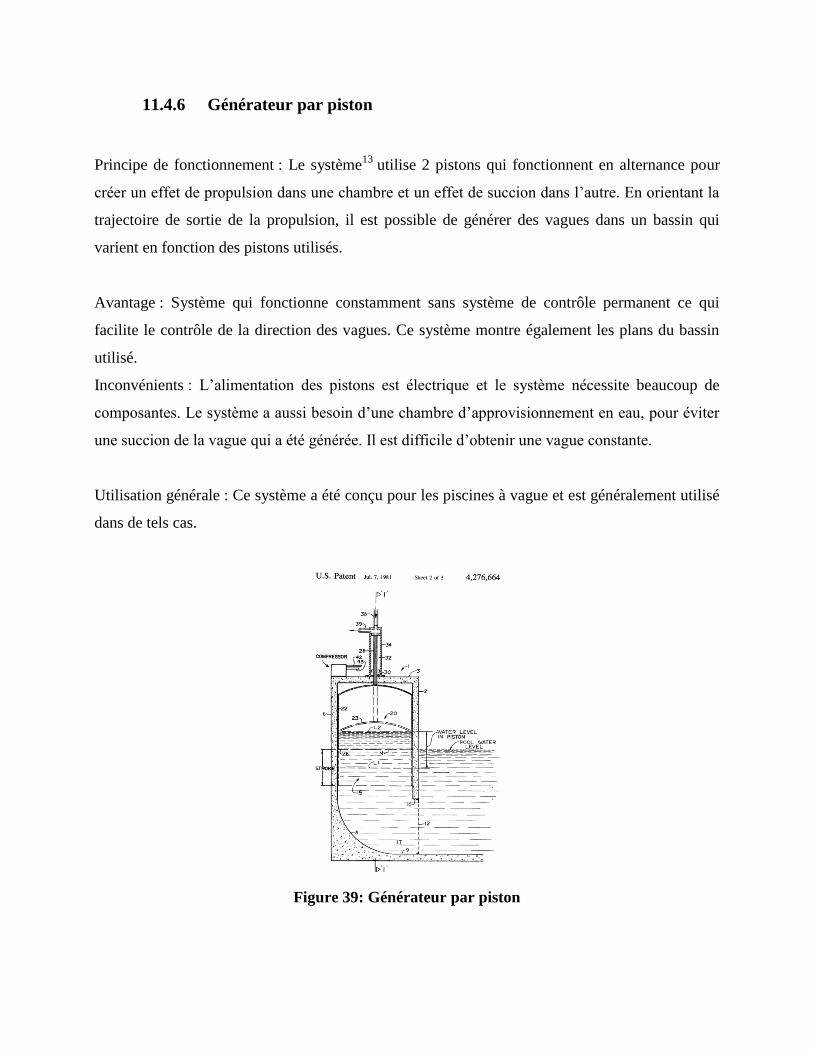
11.4.6 Générateur par piston
Principe de fonctionnement : Le système13
utilise 2 pistons qui fonctionnent en alternance pour
créer un effet de propulsion dans une chambre et un effet de succion dans l’autre. En orientant la
trajectoire de sortie de la propulsion, il est possible de générer des vagues dans un bassin qui
varient en fonction des pistons utilisés.
Avantage : Système qui fonctionne constamment sans système de contrôle permanent ce qui
facilite le contrôle de la direction des vagues. Ce système montre également les plans du bassin
utilisé.
Inconvénients : L’alimentation des pistons est électrique et le système nécessite beaucoup de
composantes. Le système a aussi besoin d’une chambre d’approvisionnement en eau, pour éviter
une succion de la vague qui a été générée. Il est difficile d’obtenir une vague constante.
Utilisation générale : Ce système a été conçu pour les piscines à vague et est généralement utilisé
dans de tels cas.
Figure 39: Générateur par piston
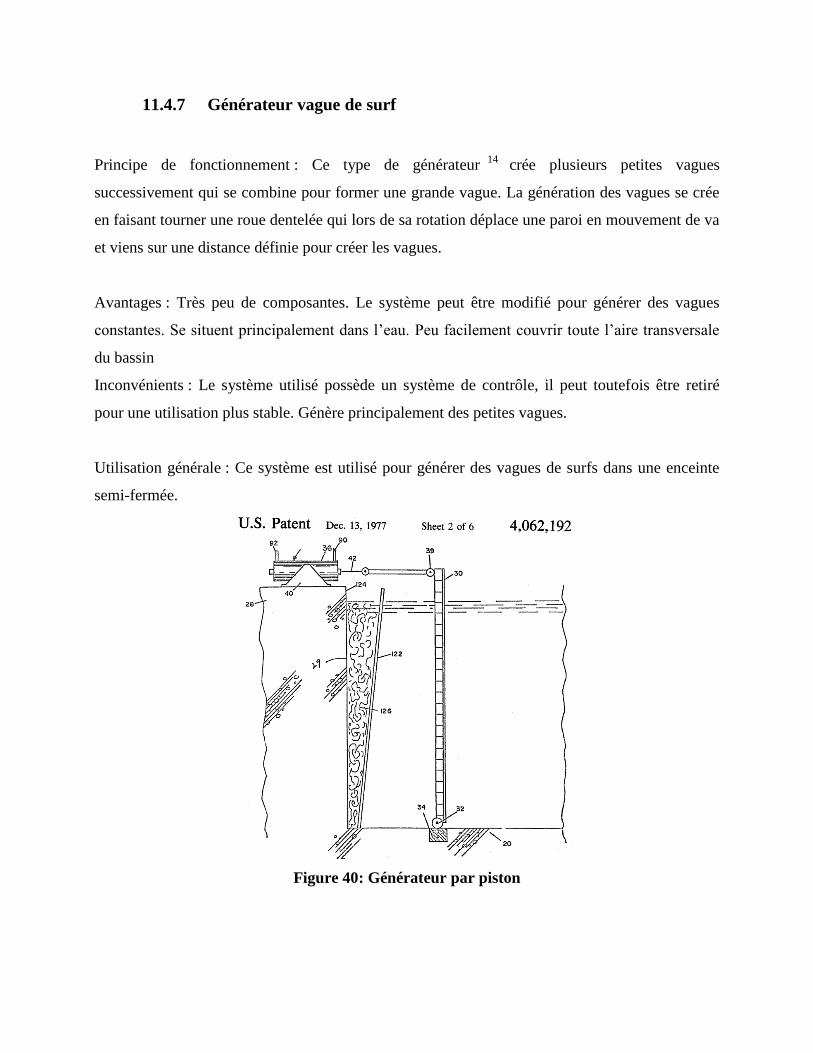
11.4.7 Générateur vague de surf
Principe de fonctionnement : Ce type de générateur14
crée plusieurs petites vagues
successivement qui se combine pour former une grande vague. La génération des vagues se crée
en faisant tourner une roue dentelée qui lors de sa rotation déplace une paroi en mouvement de va
et viens sur une distance définie pour créer les vagues.
Avantages : Très peu de composantes. Le système peut être modifié pour générer des vagues
constantes. Se situent principalement dans l’eau. Peu facilement couvrir toute l’aire transversale
du bassin
Inconvénients : Le système utilisé possède un système de contrôle, il peut toutefois être retiré
pour une utilisation plus stable. Génère principalement des petites vagues.
Utilisation générale : Ce système est utilisé pour générer des vagues de surfs dans une enceinte
semi-fermée.
Figure 40: Générateur par piston
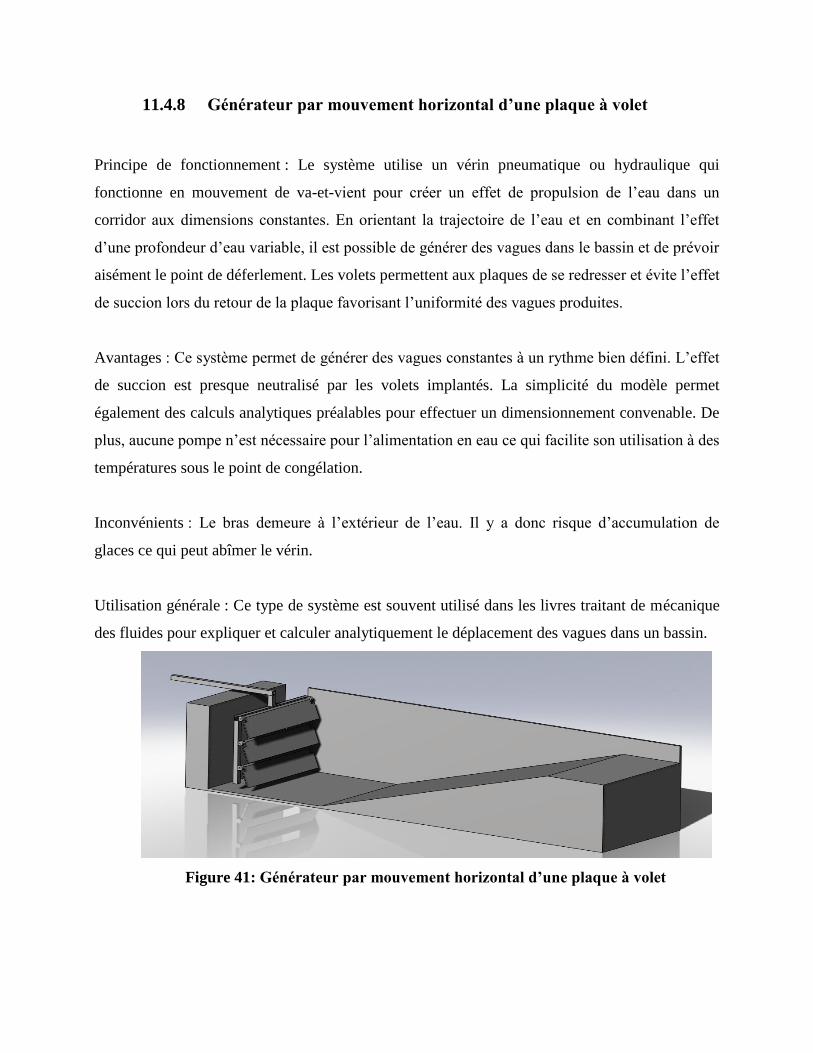
11.4.8 Générateur par mouvement horizontal d’une plaque à volet
Principe de fonctionnement : Le système utilise un vérin pneumatique ou hydraulique qui
fonctionne en mouvement de va-et-vient pour créer un effet de propulsion de l’eau dans un
corridor aux dimensions constantes. En orientant la trajectoire de l’eau et en combinant l’effet
d’une profondeur d’eau variable, il est possible de générer des vagues dans le bassin et de prévoir
aisément le point de déferlement. Les volets permettent aux plaques de se redresser et évite l’effet
de succion lors du retour de la plaque favorisant l’uniformité des vagues produites.
Avantages : Ce système permet de générer des vagues constantes à un rythme bien défini. L’effet
de succion est presque neutralisé par les volets implantés. La simplicité du modèle permet
également des calculs analytiques préalables pour effectuer un dimensionnement convenable. De
plus, aucune pompe n’est nécessaire pour l’alimentation en eau ce qui facilite son utilisation à des
températures sous le point de congélation.
Inconvénients : Le bras demeure à l’extérieur de l’eau. Il y a donc risque d’accumulation de
glaces ce qui peut abîmer le vérin.
Utilisation générale : Ce type de système est souvent utilisé dans les livres traitant de mécanique
des fluides pour expliquer et calculer analytiquement le déplacement des vagues dans un bassin.
Figure 41: Générateur par mouvement horizontal d’une plaque à volet
12 Annexe B
12.1 Bride
12.1.1 Calcul des forces sur les parois
Le calcul des forces sur les parois permettra de connaître la sollicitation sur les boulons qui
feront l’union des deux parties du bassin.
12.1.2 Calcul de la surface sur lesquelles la pression d’eau est exercée
Ainsi, la force résultante sur les boulons doit être divisée par deux et sera de :
12.1.3 Calcul du préserrage des boulons
Ainsi, la force de préserrage des boulons est de 73 N mm. Cette force assurera que les
boulons ne se brisent pas et qu’ils pourront soutenir les charges impliquées. De plus, le bassin
sera supporté aux quatre coins réduisant considérablement la flexion du bassin et ainsi qu’en son
centre. La figure suivante illustre sommairement l’assemblage en question.

Figure 42 Plan de la bride dessinée sur SolidWorks
12.2 Force sur les volets
12.2.1 Pression hydrostatique de l’eau au fond du bassin
En utilisant le principe de Bernoulli selon la formule 2.14, la pression hydrostatique au
fond du bassin est :
Équation 16 Pression hydrostatique
En définissant p1 comme étant la pression au dessus de l’eau (point de référence pour une
hauteur nulle, Z1) qui correspond à la pression barométrique (101,3 kPa). La variable Z2 est la
hauteur d’eau du bassin qui est de 0,3 m qui correspond à la hauteur de la plaque (avec un jeu de
1 ou 2 centimètres). La pression p2 est de -2,9 kPa.

En appliquant cette pression sur la surface de la plaque à volet qui est de 0,4 m x 0,3 m : La
répartition de la pression est triangulaire avec une pression nulle en surface et une pression en
fond de bassin de :
Équation 17 Pression
La force résultante est de 196 N appliquer au 1/3 de la hauteur de la plaque à volet, soit
0,1 m (voir Figure 43). Ce type de calcul sera repris lors de l’application des forces pour chacun
des volets.
Figure 43 Représentation de la force hydrostatique sur la plaque

Le Tableau 9 montre les pressions hydrostatiques. La conversion de cette pression en force
équivalente et la distance entre cette force et le joint à 90 degrés du bras.
Tableau 9 Pression hydrostatique et force équivalente à certains endroits sur l’assemblage des plaques à volets
Volet du haut Volet du milieu Volet du bas
P (N/m²) F (N) Levier (m) P (N/m²) F (N) Levier (m) P (N/m²) F (N) Levier (m)
0.979 0.022 0.27 1.958 0.044 0.37 2.937 0.066 0.47
12.2.2 Résistance de l’eau lors du déplacement de la plaque à volet
Pour cette partie, l’équation de Bernoulli est utilisée (formule 6.102)15
.
Équation 18 Bernoulli
Pour une vitesse maximale de 2 m/s, le calcul devient :
Pour calculer la force qui va combattre cette résistance pour un volet uniquement :
L‘équation de Bernoulli permet de calculer la masse d’eau déplacée et le résultat est une
pression de 128,1 Pa dans l’eau. Toutefois, la force à laquelle les volets sont soumis est la force
de traînée.
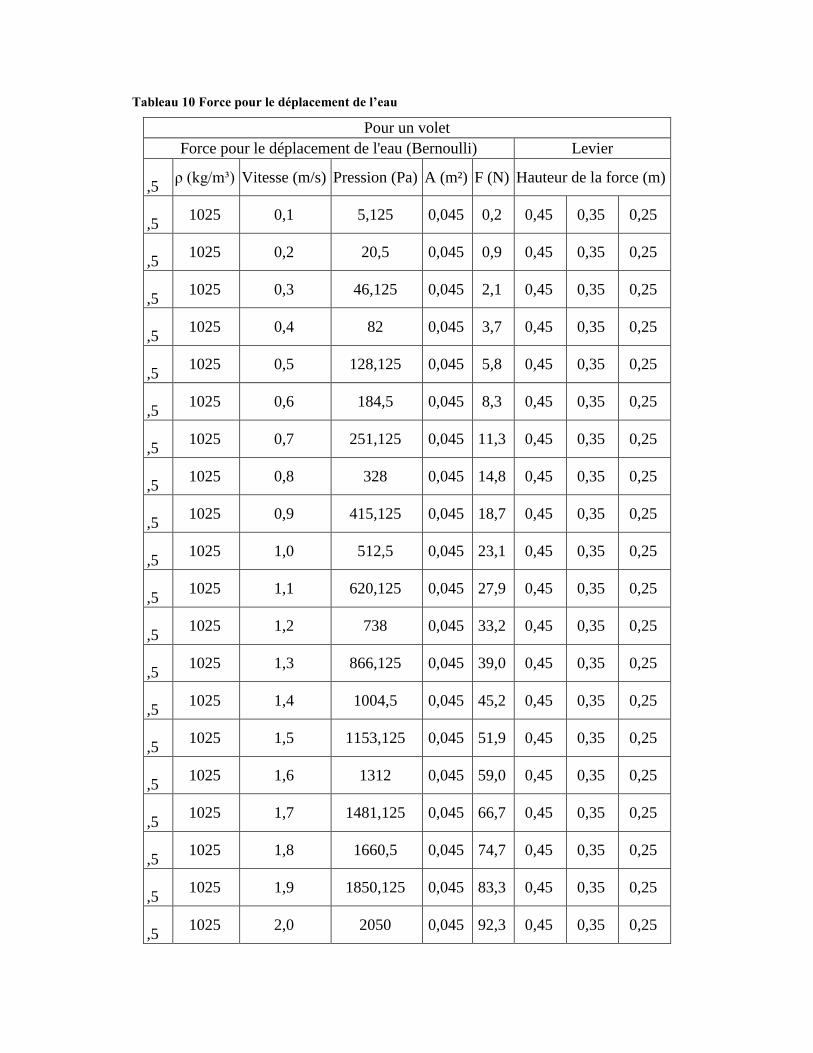
Tableau 10 Force pour le déplacement de l’eau
Pour un volet
Force pour le déplacement de l'eau (Bernoulli) Levier
0
,5 ρ (kg/m³) Vitesse (m/s) Pression (Pa) A (m²) F (N) Hauteur de la force (m)
0
,5 1025 0,1 5,125 0,045 0,2 0,45 0,35 0,25
0
,5 1025 0,2 20,5 0,045 0,9 0,45 0,35 0,25
0
,5 1025 0,3 46,125 0,045 2,1 0,45 0,35 0,25
0
,5 1025 0,4 82 0,045 3,7 0,45 0,35 0,25
0
,5 1025 0,5 128,125 0,045 5,8 0,45 0,35 0,25
0
,5 1025 0,6 184,5 0,045 8,3 0,45 0,35 0,25
0
,5 1025 0,7 251,125 0,045 11,3 0,45 0,35 0,25
0
,5 1025 0,8 328 0,045 14,8 0,45 0,35 0,25
0
,5 1025 0,9 415,125 0,045 18,7 0,45 0,35 0,25
0
,5 1025 1,0 512,5 0,045 23,1 0,45 0,35 0,25
0
,5 1025 1,1 620,125 0,045 27,9 0,45 0,35 0,25
0
,5 1025 1,2 738 0,045 33,2 0,45 0,35 0,25
0
,5 1025 1,3 866,125 0,045 39,0 0,45 0,35 0,25
0
,5 1025 1,4 1004,5 0,045 45,2 0,45 0,35 0,25
0
,5 1025 1,5 1153,125 0,045 51,9 0,45 0,35 0,25
0
,5 1025 1,6 1312 0,045 59,0 0,45 0,35 0,25
0
,5 1025 1,7 1481,125 0,045 66,7 0,45 0,35 0,25
0
,5 1025 1,8 1660,5 0,045 74,7 0,45 0,35 0,25
0
,5 1025 1,9 1850,125 0,045 83,3 0,45 0,35 0,25
0
,5 1025 2,0 2050 0,045 92,3 0,45 0,35 0,25

12.2.3 Calcul de la force de traînée
Pour le calcul de la force de traînée, la formule 7.62 du livre de White [15] a été utilisée.
Une vitesse d’avancement de 0,1 à 2,0 m/s est utilisée pour ce calcul. Un coefficient CD de 1.18
a été utilisé, ce coefficient est pour une plaque plane dans l’eau. L’approche utilisée s’avère
efficace, car les trois volets sont très proches et peuvent être considérés comme une seule plaque
lors de la poussée.
Équation 19 force de traînée
Le coefficient de traînée a été trouvé dans le tableau 6.5 [15] pour une plaque mince face
au vent.
Tableau 11 Force de traînée
Force de traînée
C
D ρ (kg/m³) U (m/s) U² (m/s²) Awet (m²) F (N)
1
,18 1025 0,1 0,01 0,045 0,3
1
,18 1025 0,2 0,04 0,045 1,1
1
,18 1025 0,3 0,09 0,045 2,4
1
,18 1025 0,4 0,16 0,045 4,4
1
,18 1025 0,5 0,25 0,045 6,8
1
,18 1025 0,6 0,36 0,045 9,8
1
,18 1025 0,7 0,49 0,045 13,3
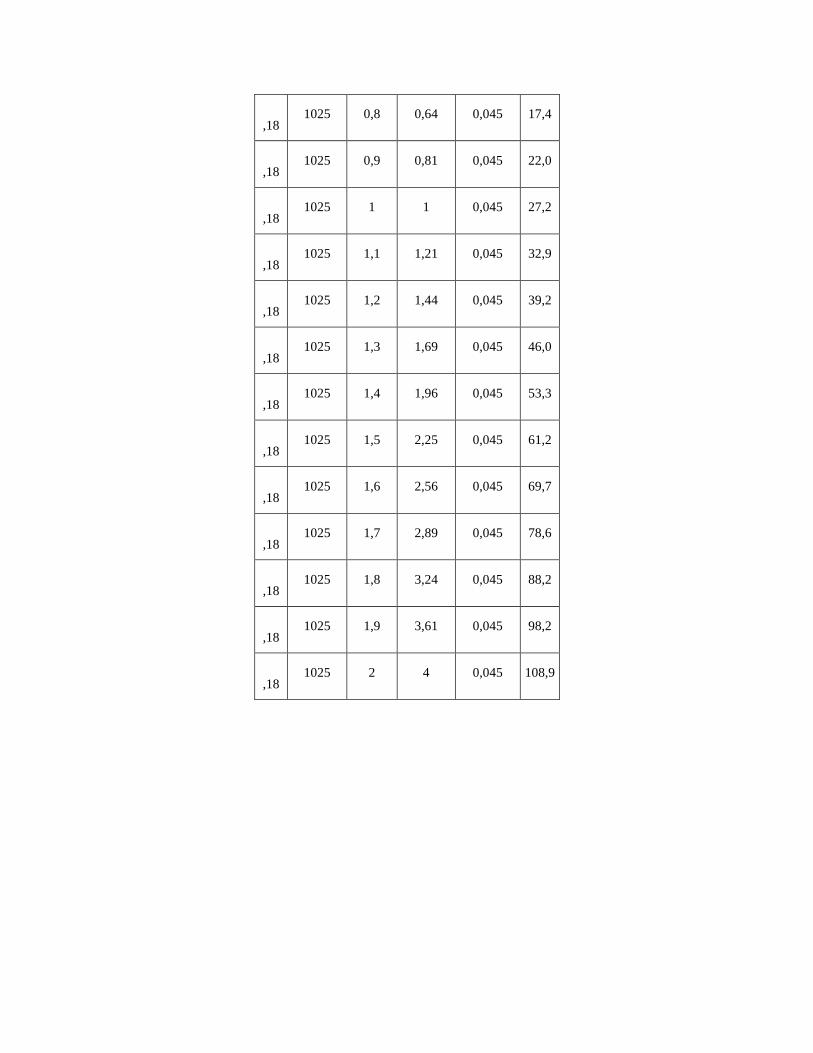
1
,18 1025 0,8 0,64 0,045 17,4
1
,18 1025 0,9 0,81 0,045 22,0
1
,18 1025 1 1 0,045 27,2
1
,18 1025 1,1 1,21 0,045 32,9
1
,18 1025 1,2 1,44 0,045 39,2
1
,18 1025 1,3 1,69 0,045 46,0
1
,18 1025 1,4 1,96 0,045 53,3
1
,18 1025 1,5 2,25 0,045 61,2
1
,18 1025 1,6 2,56 0,045 69,7
1
,18 1025 1,7 2,89 0,045 78,6
1
,18 1025 1,8 3,24 0,045 88,2
1
,18 1025 1,9 3,61 0,045 98,2
1
,18 1025 2 4 0,045 108,9

12.3 Calcul de singularité
Vérification de la flèche au bout du bras amovible par la méthode des singularités.
Figure 44 : Diagramme des corps libres pour le calcul de la flèche du bras.
Isolation de la variable C1 dans le cas où x=0.30, :
Isolation de la variable C2 dans le cas où x=0, v=0
Calcul de la flèche maximale au bout du bras :
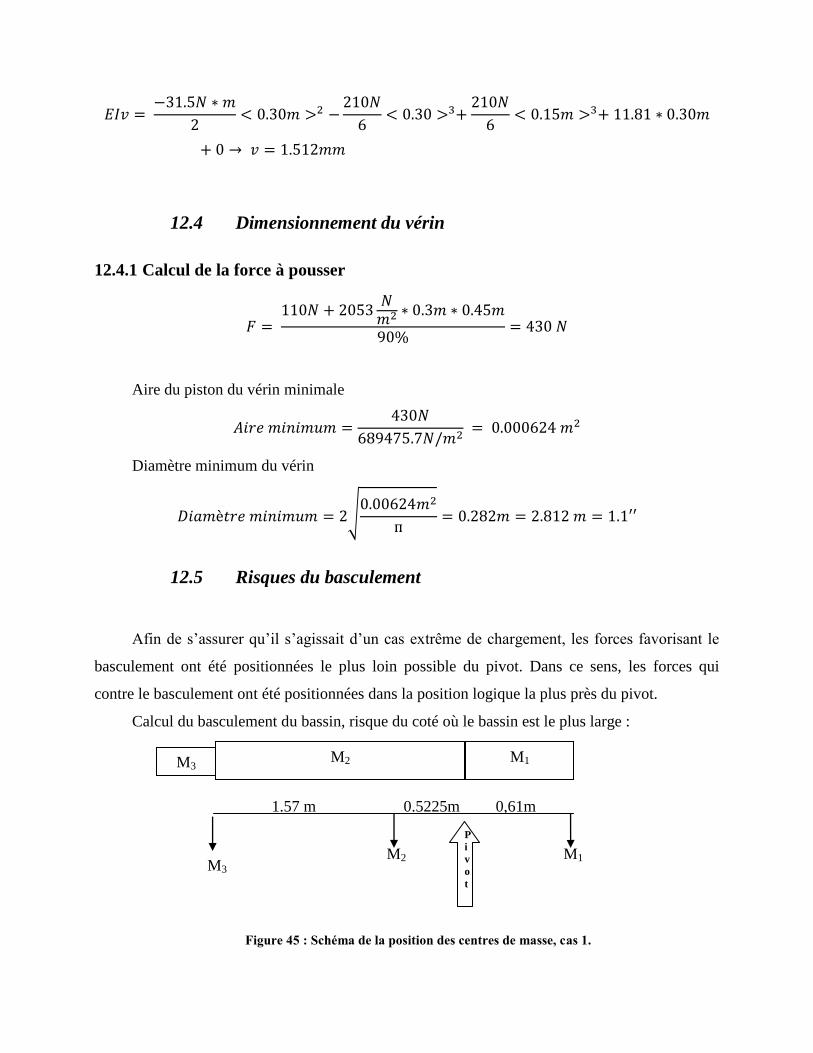
12.4 Dimensionnement du vérin
12.4.1 Calcul de la force à pousser
Aire du piston du vérin minimale
Diamètre minimum du vérin
12.5 Risques du basculement
Afin de s’assurer qu’il s’agissait d’un cas extrême de chargement, les forces favorisant le
basculement ont été positionnées le plus loin possible du pivot. Dans ce sens, les forces qui
contre le basculement ont été positionnées dans la position logique la plus près du pivot.
Calcul du basculement du bassin, risque du coté où le bassin est le plus large :
Figure 45 : Schéma de la position des centres de masse, cas 1.
1.57 m 0.5225m
m
0,61m
M3
M2 M1
M2 M3 M1
P
i
v
o
t
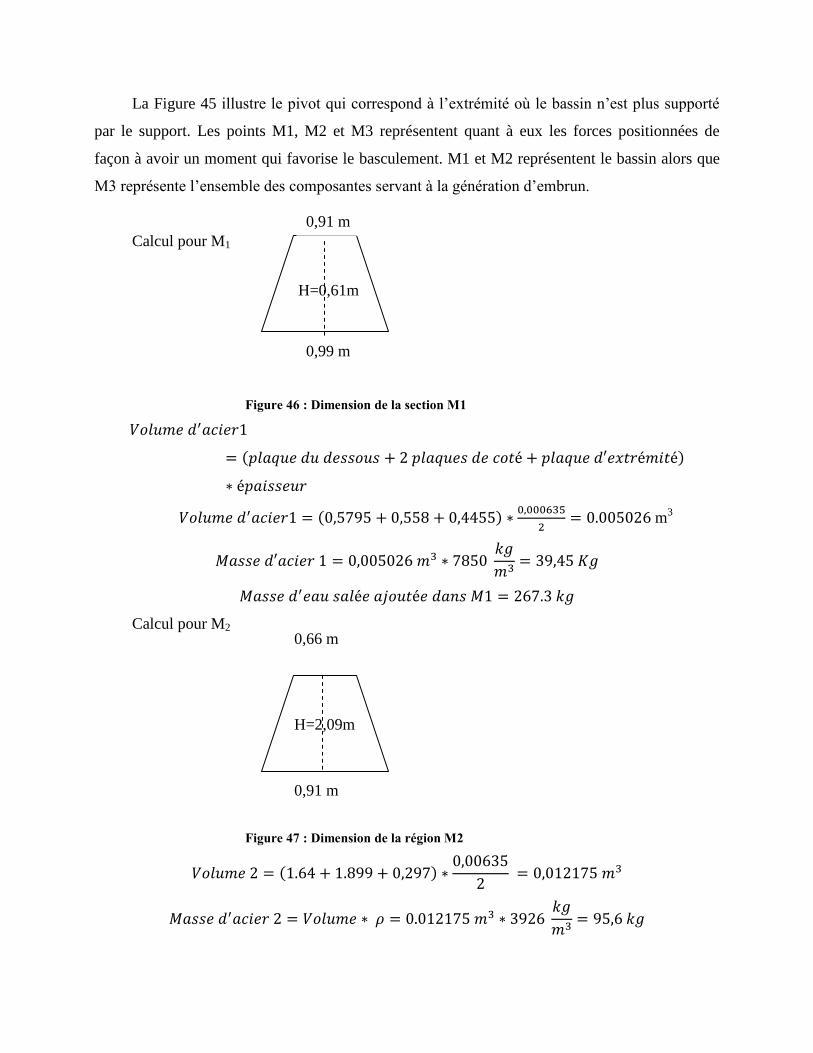
La Figure 45 illustre le pivot qui correspond à l’extrémité où le bassin n’est plus supporté
par le support. Les points M1, M2 et M3 représentent quant à eux les forces positionnées de
façon à avoir un moment qui favorise le basculement. M1 et M2 représentent le bassin alors que
M3 représente l’ensemble des composantes servant à la génération d’embrun.
Calcul pour M1
Figure 46 : Dimension de la section M1
m3
Calcul pour M2
Figure 47 : Dimension de la région M2
H=2,09m
0,91 m
0,66 m
H=0,61m
0,99 m
0,91 m
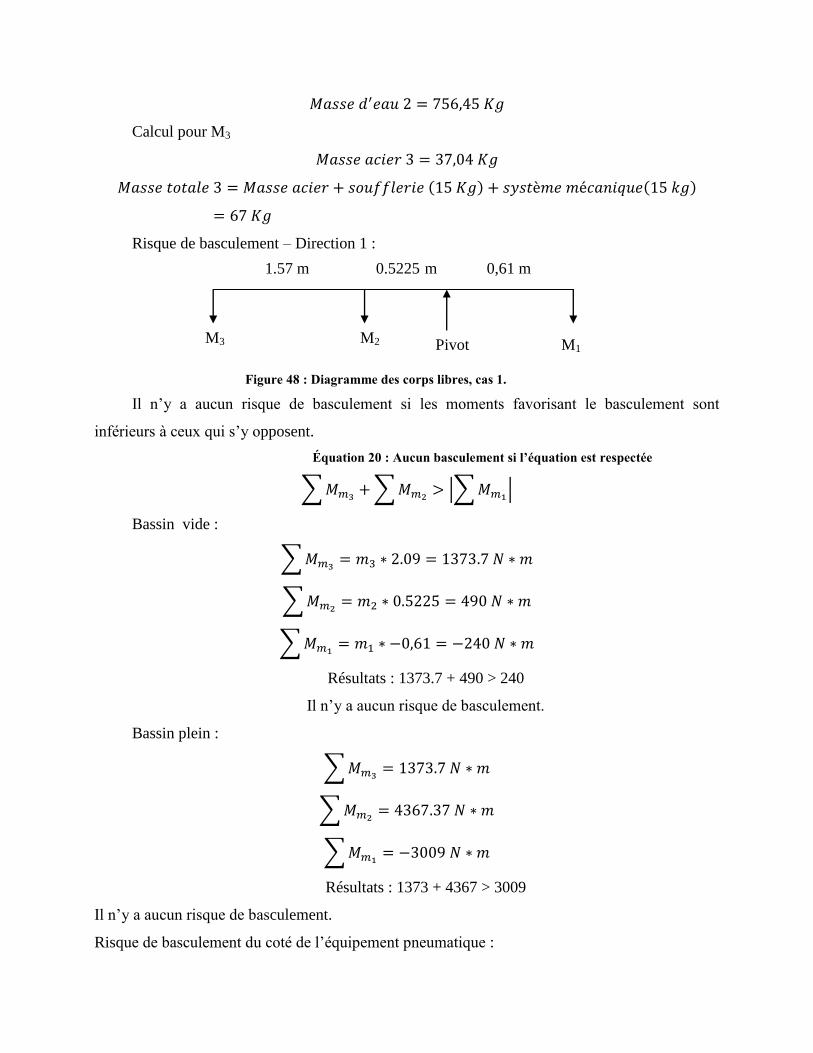
Calcul pour M3
Risque de basculement – Direction 1 :
Figure 48 : Diagramme des corps libres, cas 1.
Il n’y a aucun risque de basculement si les moments favorisant le basculement sont
inférieurs à ceux qui s’y opposent.
Équation 20 : Aucun basculement si l’équation est respectée
Bassin vide :
Résultats : 1373.7 + 490 > 240
Il n’y a aucun risque de basculement.
Bassin plein :
Résultats : 1373 + 4367 > 3009
Il n’y a aucun risque de basculement.
Risque de basculement du coté de l’équipement pneumatique :
1.57 m 0.5225 m
m
0,61 m
M3 M2 M1 Pivot
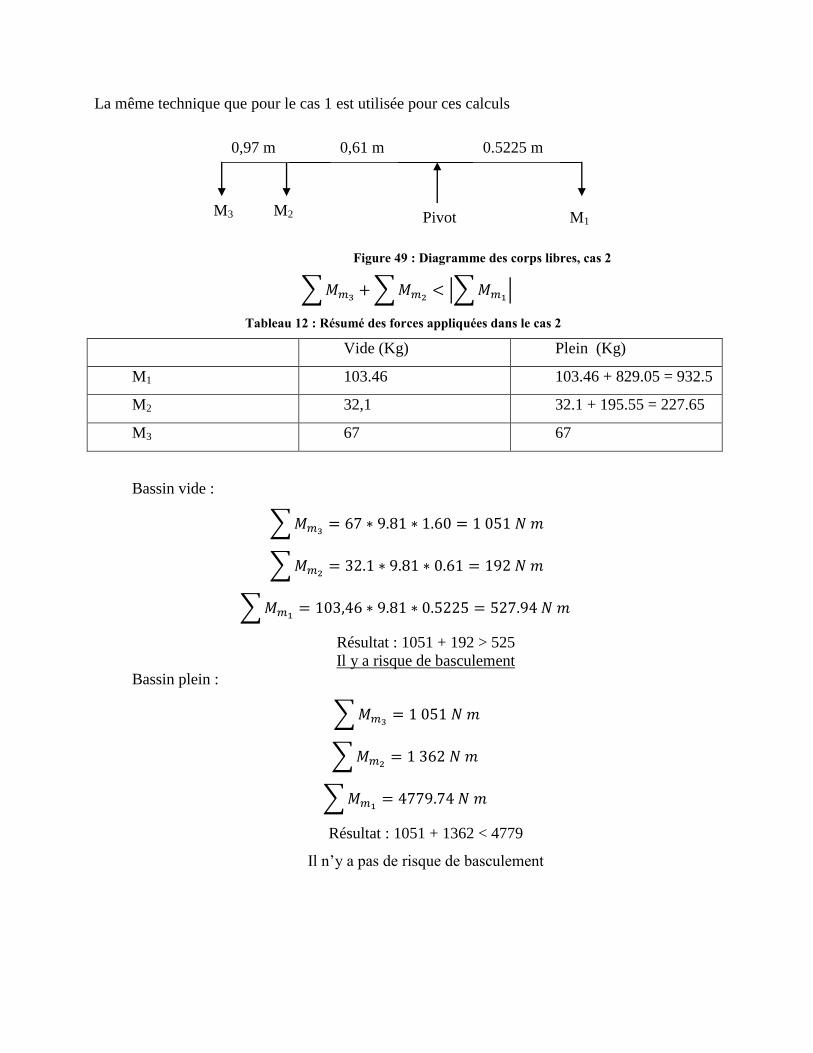
La même technique que pour le cas 1 est utilisée pour ces calculs
Figure 49 : Diagramme des corps libres, cas 2
Tableau 12 : Résumé des forces appliquées dans le cas 2
Vide (Kg) Plein (Kg)
M1 103.46 103.46 + 829.05 = 932.5
M2 32,1 32.1 + 195.55 = 227.65
M3 67 67
Bassin vide :
Résultat : 1051 + 192 > 525
Il y a risque de basculement
Bassin plein :
Résultat : 1051 + 1362 < 4779
Il n’y a pas de risque de basculement
0,97 m 0,61 m 0.5225 m
M3 M2 M1 Pivot
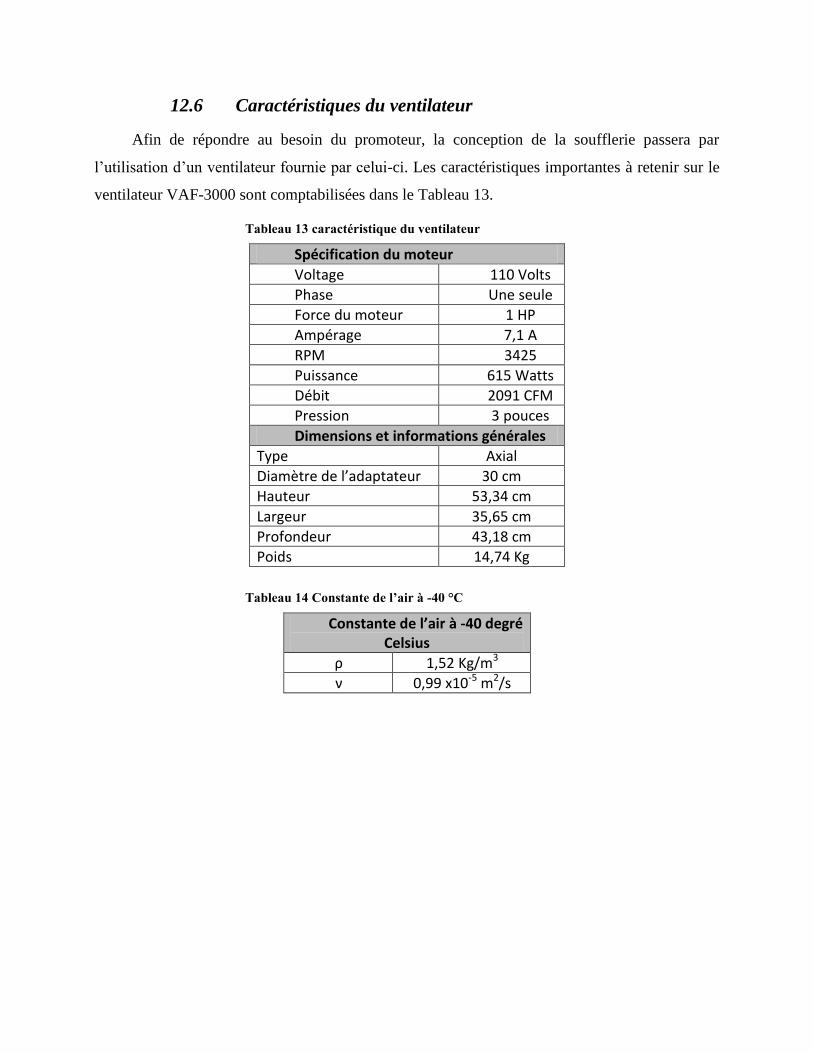
12.6 Caractéristiques du ventilateur
Afin de répondre au besoin du promoteur, la conception de la soufflerie passera par
l’utilisation d’un ventilateur fournie par celui-ci. Les caractéristiques importantes à retenir sur le
ventilateur VAF-3000 sont comptabilisées dans le Tableau 13.
Tableau 13 caractéristique du ventilateur
Spécification du moteur
Voltage 110 Volts
Phase Une seule
Force du moteur 1 HP
Ampérage 7,1 A
RPM 3425
Puissance 615 Watts
Débit 2091 CFM
Pression 3 pouces
Dimensions et informations générales
Type Axial
Diamètre de l’adaptateur 30 cm
Hauteur 53,34 cm
Largeur 35,65 cm
Profondeur 43,18 cm
Poids 14,74 Kg
Tableau 14 Constante de l’air à -40 °C
Constante de l’air à -40 degré Celsius
ρ 1,52 Kg/m3
ν 0,99 x10-5 m2/s
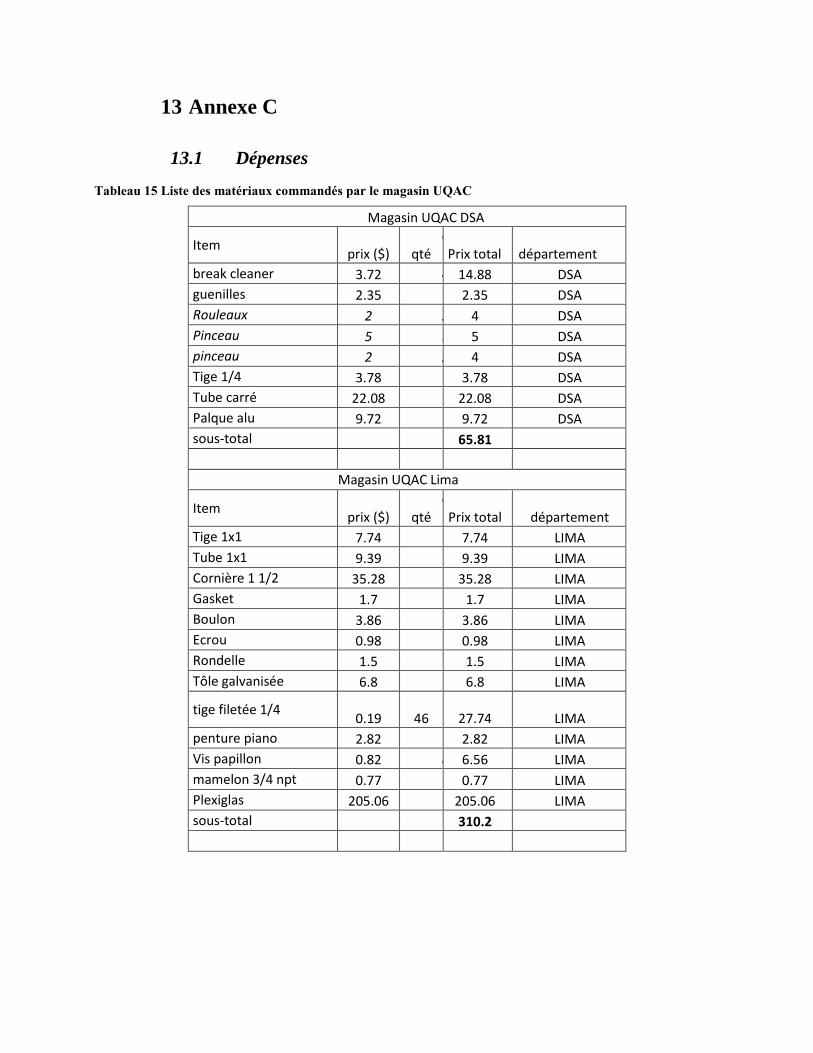
13 Annexe C
13.1 Dépenses
Tableau 15 Liste des matériaux commandés par le magasin UQAC
Magasin UQAC DSA
Item prix ($)
qqté Prix total département
break cleaner 3.72 4 14.88 DSA guenilles 2.35 1 2.35 DSA Rouleaux 2 2 4 DSA Pinceau 5 1 5 DSA pinceau 2 2 4 DSA Tige 1/4 3.78 1 3.78 DSA Tube carré 22.08 1 22.08 DSA Palque alu 9.72 1 9.72 DSA sous-total 65.81
Magasin UQAC Lima
Item prix ($)
qqté Prix total département
Tige 1x1 7.74 1 7.74 LIMA Tube 1x1 9.39 1 9.39 LIMA Cornière 1 1/2 35.28 1 35.28 LIMA Gasket 1.7 1 1.7 LIMA Boulon 3.86 1 3.86 LIMA Ecrou 0.98 1 0.98 LIMA Rondelle 1.5 1 1.5 LIMA Tôle galvanisée 6.8 1 6.8 LIMA
tige filetée 1/4 0.19
146 27.74 LIMA
penture piano 2.82 1 2.82 LIMA Vis papillon 0.82 8 6.56 LIMA mamelon 3/4 npt 0.77 1 0.77 LIMA Plexiglas 205.06 1 205.06 LIMA sous-total 310.2

Tableau 16 Liste des matériaux procurés à l'externe
IGUS
Item prix ($) q
qté Prix total département
rail/glissière 61.26 1 61.26 LIMA
DIGIKEY
Relay mini 7.92 1 7.92 LIMA
Socket 10.01 1 10.01 LIMA
Switch 16.13 2 32.26 LIMA
Switch 38.64 1 38.64 LIMA
sous-total 88.83
Pneutech
connecteur 1.52 2 3.04 LIMA
Prestolok 3.14 5 15.7 LIMA
flow control 23.16 2 46.32 LIMA
cylindre 170.72 1 170.72 LIMA
support 23.69 1 23.69 LIMA
rod clevis 23.53 1 23.53 LIMA
pivot pin 8.24 1 8.24 LIMA
1/4 DIN 98.77 1 98.77 LIMA
canfield 5.55 3 16.65 LIMA
Switch 25.9 2 51.8 LIMA
Source 79.88 1 79.88 LIMA
Muffler 4.62 1 4.62 LIMA
sous-total 542.96
Plaque acier 4x8 422.08 1 422.08 DSA
1509.88
tps 1585.37
tvq 1720.13
Total 1720.13

14 Référence
1 Ryersib, C.C. Superstructure spray and ice accretion on a large U.S. Coast Guar cutter,
Hanover, New Hampshire, 1993, 17 pages
2 OKIISHI, Munson. Fundamentals of Fluid Mechanics. Fifth edition. United State of America:
John Wiley & Sons, Inc., 2006, 750 pages. Page consultée : 562-567
3 JOHNSON T., Garret (Inventeur). Transportable wave generating device and watercraft.
US7722290. May 25th, 2010
4 BARZERGUI et al., Résistance des matériaux , troisième édition, Montréal, École de
Polytechnique de Montréal, 2002, 715 p.
5 CONCEPTEC, Portail de la technologie, La fatigue mécanique, Page consultée le 28 novembre
2010 [En ligne], Adresse URL : http://conceptec.net/materiaux/essais-mecaniques/152-lessai-
de-fatigue.html
6 M.White, F. Fluid Mechanic, second edition, New York, McGraw-Hill, 1986, 732 p. Pages
consultée (340-448)
7 BAILLARGEON, Gérald (2009). Probabilités et statistiques. Trois-Rivières : Les éditions
SMG, p.28
8 DE WITT, David and Frank INCROPERA. Fundamentals of heat and mass transfer, second
edition, New York, John Wiley & Sons, 1985, 802 p. Pages consultée (130-158)
9 Conseil national de recherches du Canada. (Page consultée le 22 septembre 2010). Générateur
de vague, [En ligne]. Adresse URL: http://www.nrc-cnrc.gc.ca/fra/installations/chc/lab-
multi.html
10 Batiproduitsmaison. (Page consultée le 22 septembre 2010). Générateur de vague, [En ligne].
Adresse URL:
http://www.batiproduitsmaison.com/bpm/FicheProdRecherche2.do?id=1019380460
11 La passion des vagues. (Page consultée le 22 septembre 2010). Générateur de vague, [En
ligne]. Adresse URL: http://wave.wowcompany.com/FR/generalites.55.html
12 Conseil national de recherches du Canada. (Page consultée le 22 septembre 2010). Générateur
de vague, [En ligne].Adresse URL: http://www.nrc-cnrc.gc.ca/fra/installations/chc/lab-
multi.html
13 Brevet US – Site WEB : http://www.freepatentsonline.com/. (Page consultée le 22 septembre
2010). Générateur vague de surf #1 – US5171101, [En ligne].
14 Brevet US – Site WEB : http://www.freepatentsonline.com/. (Page consultée le 22 septembre
2010). Générateur par piston– US4276664
15 JOHNSON T., Garret (Inventeur). Transportable wave generating device and watercraft.
US7722290. May 25th, 2010
16 DE WITT, David and Frank INCROPERA. Fundamentals of heat and mass transfer, second
edition, New York, John Wiley & Sons, 1985, 802 p. Pages consultée (130-158)
17 ÇENGEL, A. Yunus, Heat and mass transfer,Third Edition. New Delhi, Tata McGraw-Hill
Companies,866 p. Pages consultée (355-435)