Chapitre VIII : Validation expérimentale
34
Chapitre VIII : Validation expérimentale 217 Chapitre VIII : Validation expérimentale Pour valider expérimentalement le modèle d’estimation dynamique du bruit, il est nécessaire de disposer à la fois de mesures de niveaux sonores en bordure de voie (enregistrés avec une période d’intégration assez courte pour percevoir les variations du signal) et d’une description précise et synchronisée du comportement du trafic. La réalisation de mesures de bruit est courante en France mais est rarement associée à un relevé détaillé des conditions d’écoulement du trafic. Une expérimentation 1 a donc été mise en place pour recueillir les données souhaitées. Cette expérimentation a été réalisée à Toulouse, en juin 2000, par la Zone Expérimentale Laboratoire de Trafic (ZELT), en collaboration avec le LTE 2 et le LICIT 3 . Le site retenu correspond à l’aval d’un feu tricolore, ce qui permet d’étudier le comportement des véhicules durant les phases de redémarrage. La validation de la représentation de la cinématique des véhicules fournie par le modèle de trafic a été effectuée indépendamment des mesures de bruit car une bonne estimation des émissions sonores doit s’appuyer sur une description correcte de l’évolution du trafic. Les mesures de bruit ont été ensuite confrontées aux résultats du modèle global. L’analyse des données expérimentales relatives à cette expérimentation a déjà fait l’objet d’un premier rapport [Giorgi, Leclercq et Lelong, 2000] qui a conduit à améliorer grandement le fonctionnement du modèle de trafic cinématique pour aboutir aux résultats présentés dans cette thèse. Ce chapitre va reprendre de manière plus succincte les grandes étapes de la démarche expérimentale développée dans ce rapport et viendra le compléter en faisant état des avancées réalisées dans les méthodes de traitement des données. VIII.1 Protocole expérimental VIII.1.1 Objectif de l’expérimentation L’objectif de l’expérimentation présentée dans ce chapitre est de valider à la fois le fonctionnement du modèle de trafic cinématique durant les phases transitoires d’accélération et les résultats acoustiques fournis par le modèle global résultant du couplage entre le modèle de trafic et les lois d’émission unitaire de bruit. Le scénario 1 Cette expérimentation a été cofinancée par l’INRETS, le CERTU et la Mission Bruit du Ministère de l’Aménagement du Territoire et de l’Environnement (Convention MATE/INRETS n°13/2000). 2 LTE : Laboratoire Transports et Environnement (INRETS) 3 LICIT : Laboratoire Ingénierie Circulation Transports (INRETS/ENTPE)
Transcript of Chapitre VIII : Validation expérimentale

Chapitre VIII : Validation expérimentale
217
Chapitre VIII :Validation expérimentale
Pour valider expérimentalement le modèle d’estimation dynamique du bruit, il estnécessaire de disposer à la fois de mesures de niveaux sonores en bordure de voie(enregistrés avec une période d’intégration assez courte pour percevoir les variations dusignal) et d’une description précise et synchronisée du comportement du trafic. Laréalisation de mesures de bruit est courante en France mais est rarement associée à unrelevé détaillé des conditions d’écoulement du trafic. Une expérimentation1 a donc étémise en place pour recueillir les données souhaitées.
Cette expérimentation a été réalisée à Toulouse, en juin 2000, par la ZoneExpérimentale Laboratoire de Trafic (ZELT), en collaboration avec le LTE2 et le LICIT3.Le site retenu correspond à l’aval d’un feu tricolore, ce qui permet d’étudier lecomportement des véhicules durant les phases de redémarrage. La validation de lareprésentation de la cinématique des véhicules fournie par le modèle de trafic a étéeffectuée indépendamment des mesures de bruit car une bonne estimation des émissionssonores doit s’appuyer sur une description correcte de l’évolution du trafic. Les mesures debruit ont été ensuite confrontées aux résultats du modèle global.
L’analyse des données expérimentales relatives à cette expérimentation a déjà faitl’objet d’un premier rapport [Giorgi, Leclercq et Lelong, 2000] qui a conduit à améliorergrandement le fonctionnement du modèle de trafic cinématique pour aboutir aux résultatsprésentés dans cette thèse. Ce chapitre va reprendre de manière plus succincte les grandesétapes de la démarche expérimentale développée dans ce rapport et viendra le compléter enfaisant état des avancées réalisées dans les méthodes de traitement des données.
VIII.1 Protocole expérimental
VIII.1.1 Objectif de l’expérimentation
L’objectif de l’expérimentation présentée dans ce chapitre est de valider à la fois lefonctionnement du modèle de trafic cinématique durant les phases transitoiresd’accélération et les résultats acoustiques fournis par le modèle global résultant ducouplage entre le modèle de trafic et les lois d’émission unitaire de bruit. Le scénario
1 Cette expérimentation a été cofinancée par l’INRETS, le CERTU et la Mission Bruit du Ministère del’Aménagement du Territoire et de l’Environnement (Convention MATE/INRETS n°13/2000).2 LTE : Laboratoire Transports et Environnement (INRETS)3 LICIT : Laboratoire Ingénierie Circulation Transports (INRETS/ENTPE)

Estimation dynamique du bruit émis par le trafic
218
retenu pour effectuer cette validation est celui du redémarrage des véhicules en aval d’unfeu tricolore car celui-ci correspond à un écoulement du trafic particulièrement dynamiqueoù la procédure à accélération bornée introduite dans le modèle de trafic (cf. Chapitre V)est fortement sollicitée et où une large plage de vitesse est expérimentée, ce qui permet detester de manière approfondie le comportement acoustique du modèle global.
Le modèle de trafic modélise l’évolution du champ de vitesse du flux de véhicules.Pour valider cette représentation, il est nécessaire de disposer de l’évolution temporelle dela vitesse du flux en un certain nombre de points en aval du feu tricolore. Sur le terrain, iln’est possible de connaître ce profil de vitesse que de manière discrète étant donné que lesvéhicules forment un flux discontinu. La validation des profils cinématiques fournis par lemodèle de trafic se fera donc en vérifiant qu’au moment où un véhicule franchit un pointdonné du tronçon, sa vitesse mesurée correspond bien à la valeur du champ de vitesseestimée en ce point et à cet instant. Il est pour cela nécessaire de connaître précisément lavitesse et l’instant de passage des véhicules aux différents points enquêtés en aval du feu.
Le modèle d’estimation dynamique du bruit est capable de reproduire l’évolutiontemporelle des niveaux de pression acoustique reçus en bordure de voie. Pour valider lessorties acoustiques du modèle, il est donc intéressant de comparer les résultats desimulation aux mesures des niveaux de pression LAeq courts (1 s), effectués en différentspoints aux abords de la voie durant le redémarrage des véhicules.
Pour réaliser cette expérimentation, il est nécessaire de trouver un site disposantd’un feu tricolore où les conditions de mesure acoustique sont favorables (environnementouvert) et où les mouvements tournants au niveau du feu sont négligeables (pour l’instantles échanges dans les carrefours ne sont pas pris en compte par le modèle). Le choix s’estporté sur un tronçon à deux voies d’une longueur de 300 mètres correspondant à uneportion de l’Avenue de Lattre à Toulouse (cf. [Barthe et Olivero, 2000] pour la descriptionprécise de l’environnement du site étudié). Ce tronçon est muni d’un feu piéton pouvantêtre activé manuellement. Il est de plus situé en bordure de la Garonne et présente unenvironnement acoustique permettant la réalisation de mesures de qualité.
VIII.1.2 Protocole expérimental
VIII.1.2.a Mesures relatives au trafic
Pour valider le modèle de trafic cinématique, il est nécessaire de disposer auminimum de 4 à 5 points de comparaison de la vitesse en aval du feu étant donné la fortevariabilité de celle-ci à cet endroit. Le seul capteur de trafic permettant de recensersimplement et avec une précision suffisante la vitesse d’un ensemble de véhicules en unpoint donné est la combinaison de deux boucles électromagnétiques. Le tronçon ayantdeux voies de circulation, quatre boucles sont nécessaires par point de mesures ce quiconduit à un total de 16 à 20 boucles à implanter sur la portion de voie de 300 m. Cettesolution n’étant ni matériellement ni financièrement envisageable, le protocole mis enplace consiste à recueillir la trajectoire de l’ensemble des véhicules qui redémarrent ennotant leur instant de passage en différents points en aval du feu. La vitesse est alorsdéduite par dérivation de cette trajectoire.

Chapitre VIII : Validation expérimentale
219
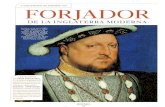
Le relevé des instants de passage des véhicules est effectué au moyen de camérasvidéo qui filment transversalement l’axe de la voie. Au-delà des 50 premiers mètres enaval du feu, des points de relevé espacés de 50 m suffisent pour déterminer la vitesse d’unvéhicule à partir de ses instants de passage. En revanche, au moment du redémarrage desvéhicules, les vitesses étant très faibles dans les 50 m en aval du feu, les points de relevésdoivent être beaucoup plus rapprochés pour pouvoir estimer la vitesse par dérivation.L’instant de passage est donc noté tous les 2 puis 4 m entre les abscisses 0 et 50 m(l’abscisse 0 m correspond à la position du feu tricolore). Pour effectuer ces relevés, unecaméra axiale filme la zone des 50 premiers mètres en aval du feu et des plots matérialisentles abscisses à enquêter (cf. Figure VIII.1b). La liste des abscisses4 où les instants depassage sont mesurés est : 0, 2, 4, 6, 8, 10, 12, 14, 16, 18, 20, 22, 24, 26, 30, 34, 38, 42, 46,50, 100, 150, 200, 250 m (cf. Figure VIII.1a). Une caméra supplémentaire est positionnée à20 m en amont du feu. Elle permet de compter le nombre de véhicules qui se présentent etd’estimer ainsi le débit entrant sur le réseau pour chaque cycle de feu enquêté.
−20 0 50 100 150 200 250 300
Feu piéton Boucles électromagnétiques
4 m
a: Schéma du dispositif expérimental
Distance au feu [m]
N S
Points de relevé des instants de passageSonomètres
b: Photographie du site
N
S
(NB: la prise de vue est inversée parrapport au schéma du dispositif ci−contre)
Figure VIII.1: Dispositif expérimental
Le dépouillement des bandes vidéo a été réalisé manuellement grâce aux horlogesinternes des différentes caméras préalablement synchronisées. Chaque véhicule est suivipar les différentes caméras depuis son passage au droit du feu jusqu’à son arrivée àl’abscisse 250 m. Sa trajectoire ainsi reconstituée est stockée dans le fichier caractérisant laréalisation du redémarrage au feu dont il fait partie. Les véhicules sont numérotés de 1 à nsuivant leur position dans la file d’attente à l’instant où le feu passe au vert. Lanumérotation est alternée suivant les voies. Les numéros impairs caractérisent desvéhicules présents sur la file de droite et les numéros pairs les véhicules sur la file degauche. Un scénario est défini par l’enquête de l’ensemble des véhicules qui redémarrentce qui regroupe tous les véhicules perturbés par la présence de la file d’attente qui s’estformée durant la période de rouge du feu.
Outre les données destinées à valider la représentation de la cinématique desvéhicules fournie par le modèle de trafic, il est nécessaire de relever les informationspermettant de calibrer le diagramme fondamental caractérisant le comportement des
4 Les mesures ont été effectuées sur l’Avenue de Lattre dans le sens Nord/Sud.

Estimation dynamique du bruit émis par le trafic
220
véhicules à l’équilibre. Pour cela, des boucles électromagnétiques relevant le débit, le tauxd’occupation5 (Toc) et la vitesse6 sont installées Avenue de Lattre à 200 m en aval du feutricolore. Les données issues de ces boucles ont été recueillies durant une quinzaine dejours comprenant les jours du relevé des trajectoires avec une période d’agrégation de 6secondes.
VIII.1.2.b Mesures acoustiques
Les mesures acoustiques sont réalisées par l’intermédiaire de 4 sonomètresintégrateurs disposés à une distance de 4 m du milieu de la voie de circulation de droiteaux abscisses 2, 25, 50 et 100 m (cf. Figure VIII.1a). Les microphones de ces appareilssont placés à une hauteur de 1,2 m. Ces sonomètres enregistrent l’évolution temporelle desLAeq, calculés avec une période d’agrégation d’une seconde, durant le redémarrage desvéhicules. Ils sont réglés sur l’horloge interne des caméras vidéo afin de garantir lasynchronisation des données trafic et des données acoustiques, en vue de l’exploitation desrésultats.
La supervision des mesures acoustiques durant l’expérimentation a été assurée parJoël Lelong du laboratoire LTE. Il s’est également occupé du dépouillement des données eta travaillé à la validation des résultats acoustiques du modèle d’estimation dynamique dubruit (cf. VIII.5).
VIII.1.2.c Déroulement de l’expérimentation
Les données provenant des boucles électromagnétiques ont été relevées sur lapériode s’écoulant du 14 au 30 juin 2000 (le week-end du 17 au 18 juin étant exclu).
Les enregistrements vidéo ont été effectués le 20 juin de 15h15 à 18h et le 21 juinde 7h30 à 11h20 et de 13h00 à 16h00. Sur l’ensemble de ces enregistrements, 22 scénariosde redémarrage s’étant déroulés dans de bonnes conditions ont pu être identifiés. Cesscénarios ont donc été dépouillés et numérotés de A1 à A22. Ils couvrent un ensembleétendu de conditions de trafic allant d’un état fluide soutenu à un état chargé mais noncongestionné (pas de remontée de congestion provenant du feu situé à 430 m en aval dufeu piéton). Le faible nombre de scénarios retenus s’explique par le coût financierimportant associé à l’opération de dépouillement.
Les mesures de bruit ont été réalisées simultanément aux enregistrements vidéo.Étant donné qu’il était impossible de choisir a priori les scénarios qui allaient être analysésd’un point de vue trafic, les mesures de bruit ont été effectuées en continu. La capacitémémoire limitée des sonomètres n’a pas permis d’enregistrer les niveaux de bruit durant ladurée totale de l’expérimentation. Au final, seuls 16 scénarios de redémarrage parmi les 22dépouillés d’un point de vue trafic disposent de mesures de bruit synchronisées.
5 Le taux d’occupation (Toc) correspond à la période de temps pendant laquelle une boucle est occupée durantsa période d’agrégation. Le Toc sert à estimer la concentration (cf. VIII.2.1.b)6 La vitesse mesurée correspond à la moyenne harmonique (moyenne des inverses) de la vitesse des véhiculesayant franchi les boucles durant la période d’agrégation de celle-ci. Cette grandeur permet d’estimer lavitesse du flux de trafic (cf Annexe 9).

Chapitre VIII : Validation expérimentale
221
VIII.1.3 Précision des relevés
Les informations relevées lors de l’expérimentation destinée à valider lecomportement du modèle d’estimation dynamique des nuisances sont de trois types : lesdonnées issues des boucles électromagnétiques, les données sonomètres et les donnéescaméras fournissant les instants de passage. Le but de ce paragraphe est de recenser laprécision relative à ces différentes données.
Le manuel d’utilisation des sonomètres indique que la précision sur les niveaux depression mesurés avec une période d’intégration d’une seconde est inférieure à 0,5 dB. Lerapport d’expérimentation réalisé par la ZELT [Barthe et Olivero, 2000] indique que laprécision sur l’instant de passage des véhicules, fourni par les caméras filmant l’axetransversalement, est inférieure à 1 s. Cette précision s’applique aux relevés effectués auxpoints d’abscisses -20, 50, 100, 150, 200 et 250 m. La caméra filmant les 50 premiersmètres en aval du feu permet l’affichage de l’heure avec une précision de 1/25ème deseconde7. Les instants de passage aux points d’abscisses 2, 4, 6, 8, 10, 12, 14, 16, 18, 20,22, 24, 26, 30, 34, 38, 42, 46 et 50 m sont donc déterminés avec cet ordre de précision.
La détermination de la précision des données fournies par les bouclesélectromagnétiques n’est pas immédiate. Les informations disponibles sur lefonctionnement de ce système d’acquisition précisent que la période de scrutation8 est de12.5 ms et que la distance d séparant la limite de détection amont d’un véhicule par deuxboucles successives est de 3 m. La vitesse V du véhicule détecté par le système est égale àd/t, où t est l’intervalle de temps séparant le passage sur la première de celui sur la secondeboucle. L’erreur ûV commise sur l’estimation de la vitesse peut donc être exprimée enfonction de l’erreur ût sur la différence des instants de passage :
2 t V t
V d Vt V d
∆ ∆ ∆∆ = − ⇒ = − (VIII.1)
L’erreur ût est au maximum égale à deux fois la période de scrutation (erreurcumulée sur l’instant de passage sur la première boucle et sur la deuxième boucle).L’erreur relative maximale sur la vitesse est donc proportionnelle à la vitesse du véhiculeavec un coefficient de 8,33.10-3. A titre d’exemple, une vitesse de 20 m.s-1 peut êtreassociée à une erreur relative maximale de 16,7%. Cette valeur peut paraître élevée maisseuls les radars sont capables de mesurer la vitesse avec une meilleure précision (de l’ordrede 2 à 5%). Par contre, ils ne savent pas localiser précisément le véhicule au moment où lamesure de vitesse est effectuée.
Il existe une relation entre le taux d’occupation et la vitesse des véhicules qui seraprésentée au paragraphe VIII.2.1.b. En utilisant cette relation et en effectuant un calculd’incertitude identique à celui présenté ci-dessus, il est possible de conclure que l’erreur
7 Ce chiffre correspond en fait au nombre d’images enregistrées chaque seconde par cette caméra.8 La période de scrutation d’une boucle électromagnétique est la période de temps qui sépare deux lectures del’état de celle-ci. Une boucle est soit active quand elle détecte la présence d’un véhicule soit inactive.

Estimation dynamique du bruit émis par le trafic
222
relative sur le taux d’occupation est du même ordre de grandeur que celle commise surl’estimation de la vitesse.
L’estimation du débit à partir des boucles électromagnétiques s’effectue parsommation des véhicules détectés pour la période de temps étudiée. Aucune informationn’est disponible sur le taux de non détection des véhicules par les boucles mais il semblerelativement faible. Le débit peut donc être considéré comme étant estimé précisément àpartir des données issues de boucles électromagnétiques.
VIII.2 Reconstitution des données en vue de leur exploitation
Les données relevées sur le terrain doivent être préalablement traitées avant depouvoir être exploitées pour calibrer et valider le modèle d’estimation dynamique du bruit.Les trajectoires des véhicules doivent être reconstituées à partir des instants de passage afind’obtenir l’évolution de la vitesse des véhicules durant la phase de redémarrage et lesdonnées issues des boucles électromagnétiques doivent être agrégées et exprimées sous laforme de couple (Q,K) afin d’en déduire la relation fondamentale caractérisant les étatsd’équilibre du trafic.
VIII.2.1 Traitement des données destinées à calibrer le diagramme fondamental
Le diagramme fondamental caractérisant la portion de voie étudiée exprime larelation existant à l’équilibre entre le débit et la concentration. Pour le déterminer, il estnécessaire dans un premier temps d’estimer la valeur de la concentration en fonction desdonnées fournies par les boucles électromagnétiques (taux d’occupation Toc et vitesse) etde réfléchir à la période d’agrégation à utiliser pour exploiter ces données afin decaractériser les états d’équilibre.
VIII.2.1.a Agrégation des données
Les boucles électromagnétiques enregistrent, toutes les 6 secondes pour chaquevoie de circulation, le nombre de véhicules détectés, le pourcentage du temps où uneboucle est activée (Toc) et la moyenne harmonique des vitesses des véhicules s’étantprésentés. Étant donné que le modèle de trafic considère l’écoulement de manière globalesur les deux voies de circulation, le premier traitement à effectuer sur les données bouclesconsiste à agréger les données 6 secondes pour l’ensemble des voies. Cette opérations’effectue en sommant les nombres de véhicules détectés sur chaque voie et en calculant lamoyenne des taux d’occupation et la moyenne harmonique des vitesses des deux voies.
Les données 6 secondes ne peuvent être utilisées en l’état pour qualifier lessituations d’équilibre du trafic car les notions d’équilibre et de flux ne sont pas compatiblesavec cette échelle temporelle. Le nombre maximum de véhicules détectés en 6 secondespermet de comprendre ce phénomène. D’après les résultats de mesure, ce nombre est égal à9 pour les deux voies de circulation ce qui correspond à un débit de 1,5 véh.s-1. Si cettevaleur est utilisée pour caractériser le débit maximum, celui-ci va être estimé aux alentoursde 5400 véh.h-1. Or, un tel débit pendant une heure n’est jamais observé sur le terrain.

Chapitre VIII : Validation expérimentale
223
La mesure associée à ce nombre maximum de véhicules détectés ne correspond pasà un point d’équilibre stable. Il n’est d’ailleurs apparu qu’une seule fois en quinze jours derelevés. Pour caractériser les états d’équilibre, il est donc nécessaire d’agréger les donnéesboucles sur une certaine période de temps afin de caractériser des états stables etreproductibles du trafic. La définition de cette période est délicate car si elle ne peut pasêtre trop courte, elle ne doit pas non plus être trop longue. Dans ce dernier cas, lesvariations dynamiques des états du trafic n’apparaissent plus. L’utilisation d’une périoded’agrégation de 6 min par exemple fait que les congestions d’une durée inférieure à cettepériode ne sont plus perceptibles et que les périodes de pointe de trafic sont grandementlissées par l’effet des feux tricolores (qui créent des ruptures dans l’écoulement) et parcelui de la demande (qui n’est pas forcement soutenue de manière continue sur une telledurée).
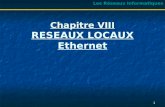
Pour déterminer la période d’agrégation la méthode utilisée consiste à étudierl’évolution du débit dépassé durant 5% de la durée totale des mesures effectuées le jour enfonction de la période d’agrégation utilisée. Cet indicateur permet d’estimer la valeur dudébit de pointe observé sur le terrain suivant la période d’agrégation. Les différentespériodes testées sont 6, 12, 18, 24, 30, 60, 90 et 360 s (cf. Figure VIII.2).
6 1830 60 90 120 240 3600
500
1000
1500
2000
2500
3000
3500
Période d’agrégation [s]
Déb
it dé
pass
é 5%
du
tem
ps [v
éh/h
]
Figure VIII.2: Influence de la période d’agrégation des données boucles sur le débit dépassé 5% du temps
La Figure VIII.2 montre que pour des périodes d’agrégation supérieures à 60 s ledébit dépassé 5% du temps est quasiment constant. Ce phénomène peut être dû soit au faitque la demande n’est jamais maximum durant des périodes de temps si longues soit plussûrement à l’effet des feux tricolores situés en amont des boucles. En milieu urbain, laprésence en grand nombre de feux régule le comportement du trafic. Sur des périodesdépassant la durée courante des cycles de feu (comprise entre 60 et 120 s), le débitmaximum observé est fortement influencé par les périodes de rouge durant lesquelles letrafic ne peut circuler. Les périodes d’agrégation supérieures à 60 s ne sont donc pasadmissibles pour traiter les données boucles.
Les débits dépassés 5% du temps, obtenus pour des périodes d’agrégationinférieures à 30 s, apparaissent fortement sensibles à la valeur de la période. Le débit depointe n’est pas stable très longtemps car il n’est plus observé pour la période d’agrégation

Estimation dynamique du bruit émis par le trafic
224
immédiatement supérieure. L’analyse de la Figure VIII.2 montre qu’une périoded’agrégation de 30 s semble être un bon compromis pour traiter les données issues desboucles électromagnétiques. Cette période a de plus l’avantage de correspondre au tempsnécessaire à une file d’attente assez conséquente pour se vider. Or, il est connu que le débitmaximum s’observe le plus souvent en ville en aval d’un feu tricolore lors du passage dupeloton de véhicules correspondant à la file d’attente.
VIII.2.1.b Détermination de la relation entre K et Toc
Le taux d’occupation (Toc) exprime le temps pendant lequel une boucleélectromagnétique est activée durant sa période d’agrégation T. Soit n le nombre devéhicules qui se présentent sur une boucle durant T, chacun d’entre eux occupe la bouclependant un temps ti égal à de/Vi, où Vi est la vitesse du véhicule et où de est la distanceélectrique. Cette distance correspond à la longueur du véhicule telle que la boucle laperçoit, c'est-à-dire la longueur de la masse métallique détectée sur le véhicule augmentéede la longueur de la boucle. Le taux d’occupation peut donc être formulé comme suit :
1 1
1 1 1n ne
oc i ei i i h
d nT t d
T T V T V= =
= = =< >∑ ∑ (VIII.2)
L’équation VIII.2 fait apparaître la moyenne harmonique <Vh> des vitesses desvéhicules passant sur la boucle durant T. Comme cette moyenne est égale à la vitesse duflux (cf. Annexe 9) et que n/T correspond au débit Q s’écoulant durant T, il existe unerelation simple entre le taux d’occupation et la concentration :
1oc e eT d Q d K
V= = (VIII.3)
Cette relation ne dépend que de la longueur électrique de qu’il reste à déterminer.Dans le cadre de cette expérimentation, les boucles électromagnétiques sont utilisées parpaire sur chaque voie afin d’estimer en plus du Toc et du débit Q la vitesse des véhicules.Lorsqu’un seul véhicule passe sur un groupe de deux boucles durant la périoded’agrégation T, il est possible connaissant sa vitesse9 V d’en déduire la distance électrique(cf. VIII.2) :
e ocd T VT= (VIII.4)
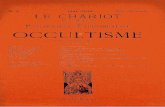
Parmi l’ensemble des enregistrements provenant des boucles électromagnétiques,les séquences où un seul véhicule s’est présenté ont été isolées10. La Figure VIII.3aprésente la répartition en fréquence des différentes valeurs de longueur électrique obtenues.Les oscillations qui apparaissent sur ce graphe sont dues au fait que le Toc et la vitesse sontexprimés en nombre entier dans les fichiers de mesure. L’analyse de ce graphe fait ressortirun groupe de longueurs électriques comprises entre 2 et 6 mètres qui représentent en toutelogique les véhicules légers. Ce groupe représente environ 94% des observations
9 Les boucles électromagnétiques relèvent la moyenne harmonique des vitesses des véhicules qui passentdurant T. Lorsqu’un seul véhicule se présente, cette valeur est égale à la vitesse du véhicule.10 Ceci représente un total de 93785 séquences ce qui est suffisamment représentatif pour déterminerstatistiquement la valeur moyenne de la distance électrique.

Chapitre VIII : Validation expérimentale
225
effectuées. En sélectionnant ce sous-ensemble de points, il est possible de calculer lalongueur électrique moyenne associée aux véhicules légers. Cette longueur est égale à3,8 m avec un intervalle de confiance à 95% de ±0,01 m.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Fré
quen
ce d
’obs
erva
tion
cum
ulée
0 1 2 3 4 5 6 7 8 10 12 150%
2%
4%
6%
8%
10%
12%
14%
16%
Fré
quen
ce d
’obs
erva
tion
Longueur électrique Le [m]
a: Répartition des longueurs électriques observées
0 5 10 15 20 25 30 351.5
2
2.5
3
3.5
4
4.5
5
Vitesse [m/s]
Long
ueur
éle
ctriq
ue L
e [m]
b: Influence de la vitesse sur la longueur électrique
Correction de Le suivant V
Le moyenne observée
Intervalle de confiance à 95%
Figure VIII.3: Détermination de la longueur électrique
La longueur de détection d’un véhicule par une boucle est théoriquement constantepuisqu’elle correspond à la somme de la longueur de masse métallique détectable et de lalongueur de la boucle. Cependant, l’analyse des données issues des bouclesélectromagnétiques montre que plus la vitesse à laquelle passe un véhicule est grande plusla longueur de masse métallique détectée est petite. La Figure VIII.3b montre ainsil’influence de la vitesse sur la longueur électrique détectée par la boucle. Afin d’affiner lesrésultats qui vont permettre de calibrer le diagramme fondamental, il a été choisid’introduire dans l’expression VIII.3 une correction de la longueur électrique en fonctionde la vitesse. Cette correction a été supposée affine et est présentée sur la Figure VIII.3b.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
500
1000
1500
2000
2500
3000
3500
4000
Concentration K [véh/m]
Déb
it Q
[véh
/h]
Figure VIII.4: Diagramme ( Q,K) correspondant aux données boucles agrégées sur une période de 30 s
Grâce à l’équation VIII.3 et au correctif présenté ci-dessus, il est possibled’exprimer l’ensemble des données provenant des boucles électromagnétiques sous laforme de couples (Q,K) agrégés sur une période de 30 s (cf. Figure VIII.4). Il reste à filtrerces points pour déterminer ceux qui peuvent être considérés comme représentatifs des états

Estimation dynamique du bruit émis par le trafic
226
d’équilibre du trafic. Cette opération sera effectuée dans le paragraphe consacré aucalibrage du modèle d’estimation dynamique du bruit (cf. VIII.3.1).
VIII.2.2 Reconstitution des trajectoires des véhicules
VIII.2.2.a Méthodologie
Les enregistrements vidéo fournissent les instants de passage des véhicules en uncertain nombre de points en aval du feu tricolore. Ces dates de passage ne sont pas connuesavec une précision suffisante pour en déduire la vitesse des véhicules par le simple calcul,de proche en proche, du rapport entre la distance parcourue entre deux points successifs etle temps nécessaire pour couvrir cette distance. En effet, un véhicule qui roule à 60 km.h-1
franchit une distance de 50 m en 3 secondes. Etant donné que les caméras qui filment letronçon transversalement ont une précision d’une seconde, le temps de parcours estimépeut être compris entre 1 et 5 s ce qui conduit à une vitesse de 36 à 150 km.h-1. Pourdéterminer la vitesse des véhicules à partir des enregistrements vidéo, il convient doncdans un premier temps de reconstituer globalement leur trajectoire afin de lisser les erreursprovenant des différents points de mesure. La vitesse sera ensuite déduite par dérivation.
Pour estimer la trajectoire des véhicules à partir des instants de passage endifférents points, il est nécessaire de définir une trajectoire théorique continue quireprésente de manière satisfaisante le comportement de ceux-ci. L’ajustement des donnéesexpérimentales va alors consister à déterminer les valeurs des paramètres définissant cettetrajectoire continue qui correspondent le mieux à ces données au sens des moindres carrés.
Durant le redémarrage d’un peloton deux grands types de comportement peuventêtre identifiés : une phase d’accélération entre le moment où les véhicules redémarrent etcelui où ils atteignent leur vitesse désirée et une phase de croisière où ils roulent à vitesseconstante. En supposant que l’accélération a des véhicules est constante durant la premièrephase et en notant xc l’abscisse à laquelle le changement de phase a lieu, il est possible dedéfinir la trajectoire théorique d’un véhicule comme suit :
( ) ( ) ( ) ( )
( ) ( )
22 0 0
0 0 0 0
1 2si
2
si ( )
c
cc d c c c
d
V V xx x x t a t t V t t t x t
a a a
x xx x x t V t t x t x t
V
≤ = − + − ⇒ = − + + − > = − + ⇒ = +
(VIII.5)
a : Accélération du véhicule durant la phase d’accélérationV0 : Vitesse du véhicule en x=0Vd : Vitesse désirée ou vitesse observée durant la phase de croisièrexc : Abscisse à partir de laquelle le véhicule arrête d’accélérer pour rouler à vitesse constantet0 : Instant de passage du véhicule en x=0tc : Instant de passage du véhicule en xc
L’expression VIII.5 des instants de passage en fonction des abscisses peut être misesous la forme d’une unique équation afin de faciliter le processus d’ajustement :
( ) ( ) ( )2
0 00
2min , max ,c c c
d
x x x x xV Vt x t
a a a V
− = − + + + (VIII.6)

Chapitre VIII : Validation expérimentale
227
La trajectoire correspondant à l’équation VIII.6 est simplifiée car dans la réalité lesvéhicules ont tendance à accélérer d’autant moins que leur vitesse est proche de leurvitesse désirée ce qui invalide au sens strict l’hypothèse d’une accélération constantedurant la première phase. Cependant, le résultat de l’ajustement des donnéesexpérimentales avec cette forme de trajectoire est satisfaisant (cf. VIII.2.2.b) ce qui permetde penser que la variation d’accélération en fonction de la vitesse est relativement faibledans la réalité. L’ajustement a été réalisé grâce à la boîte à outil « Curve Fitting » dulogiciel MatLab®. L’algorithme utilisé par ce logiciel détermine les valeurs (a, V0, Vd, xc,t0) qui minimisent l’écart au sens des moindres carrés entre l’équation VIII.6 et les donnéesexpérimentales (t,x). Cet algorithme de type « Trust Region » [Branch et al, 1999] estadapté à l’optimisation de problèmes non linéaires. Les conditions initiales utilisées et lesbornes introduites sur les différentes variables sont présentées au Tableau VIII.1.
Variables Borne inf Borne sup Condition initialea [m.s-2] 0 2 0.1V0 [m.s-1] 0 30 1Vd [m.s-1] 0 30 10
t0 [s] 0 40 t(x=0)11
xc [m] 0 250 0 ou 25012
Tableau VIII.1: Conditions initiales et bornes introduites lors de l’ajustement des trajectoires des véhicules
Pour chaque véhicule, les résultats de l’ajustement sous la forme VIII.6 sontcomparés aux résultats fournis par une simple régression linéaire. En effet, les derniersvéhicules recensés pour un scénario donné peuvent ne pas être perturbés par le feu et doncrouler à vitesse constante. Le meilleur ajustement au sens des moindres carrés est retenu.La trajectoire estimée de chaque véhicule est également retravaillée lorsqu’un saut devitesse (positif ou négatif) trop important apparaît en xc. Lorsqu’une décélération a lieu ence point, la vitesse Vd est considérée égale à la vitesse estimée en xc si aucun phénomène sedéroulant dans le scénario ne justifie une décélération. En effet, la précision sur lesmesures réalisées pour les derniers points en aval du feu (x>100 m) est faible etl’estimation de Vd peut être faussée par un point aberrant. Lorsqu’un saut positif de vitessesupérieur à 1 m.s-1 apparaît en xc, il est alors supposé que les véhicules continuent àaccélérer après xc jusqu’à atteindre la vitesse Vd. Cette opération revient à déplacer versl’aval la position de xc en posant dans ce cas :
2 20
2d
c
V Vx
a
−=
Une fois la trajectoire ajustée et ses paramètres définis, la valeur de la vitesse d’unvéhicule en un point x en aval du feu est donnée par :
( )( )
20si 2
si
c
c d
x x V x V ax
x x V x V
≤ = +
> =(VIII.7)
11 Instant de passage mesuré pour le véhicule en x=0.12 Deux ajustements ont été réalisés pour ces deux valeurs initiales de xc et seul le meilleur a été retenu. Cedouble ajustement est nécessaire car le procédé d’optimisation ne détermine qu’un optimum local qui estapparu dépendre fortement de la valeur initiale choisie pour xc.

Estimation dynamique du bruit émis par le trafic
228
VIII.2.2.b Résultats obtenus
L’analyse des données vidéo fait ressortir une mauvaise synchronisation de lacaméra chargée d’enquêter les points compris entre 0 et 50 m par rapport aux autrescaméras. Heureusement, des véhicules roulant à vitesse constante peuvent être identifiéssur les enregistrements ce qui permet de recaler les données « instants de passage » entretoutes les caméras (cf. [Giorgi, Leclercq et Lelong, 2000]).
0
10
20
30
40
50
Nb
d’ob
serv
atio
ns
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9 1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9 2
Somme des écarts quadratiques SSE après interpolation
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Fré
quen
ce c
umul
ée
Figure VIII.5: Répartition des écarts quadratiques entre courbe ajustée et données expérimentales pour l’ensemble des véhicules
Une fois ce recalage effectué, les données correspondant aux 331 véhiculesenquêtés (répartis dans les 22 scénarios) ont été traitées grâce à la méthodologiedéveloppée au paragraphe précédent. La Figure VIII.5 présente la répartition de la sommedes écarts quadratiques (SSE) obtenus entre les trajectoires ajustées et les donnéesexpérimentales pour cet ensemble de véhicules. La qualité des ajustements est trèssatisfaisante puisque 50% des ajustements obtiennent une SSE inférieure à 0.5 s et 87%une SSE inférieure à 1 s. Pour les 43 véhicules dont la SSE est supérieure à 1 s, la moinsbonne qualité de l’ajustement s’explique soit par des mesures aberrantes soit par uncomportement qui s’éloigne de la trajectoire théorique (ralentissement en fin de zone,réaccélération…).
0 50 100 150 200 2500
5
10
15
20
25
30
35
40
14
69
10
12
Distance au feu x [m]
Inst
ant d
e pa
ssag
e t [
s]
0 50 100 150 200 250
6
8
10
12
14
16
18
20
22
14
6
9
10
12
Distance au feu x [m]
Vite
sse
[m/s
]
Figure VIII.6: Trajectoires et vitesses des véhicules 1,4, 6, 9, 10 et 12 du scénario A22

Chapitre VIII : Validation expérimentale
229
L’ensemble des trajectoires ajustées ne sera pas présenté ici. Les résultats de cetravail seront utilisés directement dans la partie dédiée à la validation des profilscinématiques fournis par le modèle de trafic à accélération bornée. A titre d’exemple, laFigure VIII.6 reproduit les trajectoires ajustées de 6 véhicules faisant partie du scénarioA22 et l’estimation de la vitesse correspondante.
VIII.2.2.c Précision de la vitesse estimée à partir des trajectoires reconstituées
Il est difficile de réaliser une étude précise de l’incertitude sur l’estimation de lavitesse des véhicules résultant du traitement des données expérimentales. En effet, lecheminement qui mène des données brutes aux profils cinématiques est source denombreuses imprécisions potentielles :
- Relevé des instants de passage à partir des enregistrements caméras (précision de1/25 s pour la caméra filmant les 50 premiers mètres en aval du feu et de 1 s pour lesautres caméras) ;
- Post-synchronisation des données caméras grâce à l’observation de véhiculesisolés roulant à vitesse constante ;
- Définition d’une trajectoire théorique simplifiée par rapport au comportement réeldes véhicules ;
- Ajustement des trajectoires ;
- Calcul de la vitesse par dérivation.
La trajectoire théorique des véhicules (cf. VIII.6) étant non linéaire, le calcul deserreurs commises lors de l’ajustement des instants de passage est compliqué. Ladétermination analytique de l’incertitude sur l’estimation de la vitesse ne sera donc pasentreprise ici.
La faiblesse des écarts entre les trajectoires ajustées et les données expérimentales(cf. Figure VIII.5) fournit cependant une idée de la qualité de l’estimation des profilscinématiques obtenus. En effet, le coefficient de détermination (r²) est en moyenne pourl’ensemble des trajectoires ajustées égal à 0,9852. Une telle valeur montre que latrajectoire théorique représente bien le comportement des véhicules en aval d’un feu. Deplus, en supposant que les erreurs induites par la simplification de la trajectoire exacte etpar les imprécisions des mesures suivent une loi normale, il est possible de conclure queles trajectoires estimées sont très proches des trajectoires réelles étant donné la qualité desajustements. L’ajustement des trajectoires permet en fait de lisser les erreurs de mesures etaugmente ainsi la précision sur le calcul de la vitesse des véhicules.
Une autre façon d’étudier la qualité de l’estimation de la vitesse par la méthode dereconstitution des trajectoires est d’utiliser les données fournies par les bouclesélectromagnétiques situées à 200 m en aval du feu. En effet, celles-ci mesurent par périodede 6 s la moyenne harmonique des vitesses des véhicules ayant été détectés avec uneprécision de l’ordre de 10% (cf. VIII.1.3). Il est donc possible de comparer ces donnéesavec le résultat de l’estimation de la vitesse des véhicules au point x=200 m. Cetteopération est fastidieuse car il faut rechercher dans l’ensemble des données boucles, cellesqui correspondent au redémarrage étudié sachant que la synchronisation n’est pas parfaite

Estimation dynamique du bruit émis par le trafic
230
entre ces données et celles issues des caméras. Il faut ensuite identifier par plage de 6 s lesvéhicules étant passés sur chaque boucle (il y en a 2, une par voie de circulation) pourpouvoir agréger les vitesses estimées à partir des trajectoires. Ce travail ne pouvant êtreautomatisé, il n’a été effectué que pour le scénario A22. Le Tableau VIII.2 montre lerésultat de la comparaison.
Numéros véhicules Vitesse estimée aprèsreconstitution des trajectoires13 [km/h]
Vitesse mesurée par les bouclesélectromagnétiques [km/h]
Ecart
1 69.7 66 5.3%2/3/5 56.8 50 12.0%4/7 65.1 64 1.7%
6/8/9/10/11 57.2 50 12.6%12 69.2 66 4.6%13 55.7 57 -2.3%
Tableau VIII.2: Comparaison entre la vitesse mesurée par les boucles et celle calculée par ajustement des trajectoires
Les vitesses calculées par la méthode de reconstitution des trajectoires apparaissenttrès proches des valeurs mesurées par les boucles électromagnétiques lorsqu’un seulvéhicule franchit la boucle durant la période de 6 s (écart de l’ordre de 5%). Les résultatssont un peu moins bons lorsque plusieurs véhicules se présentent sur les boucles en 6 s.L’écart entre les valeurs obtenues reste cependant du même ordre de grandeur que laprécision des boucles. Cet écart n’apparaissant que dans la situation précise où plusieursvéhicules passent sur la boucle, il est possible que la mesure de la vitesse par ce dispositifsoit plus imprécise dans ce cas.
L’estimation de la vitesse à partir des trajectoires peut donc être considérée commesatisfaisante. L’incertitude sur cette estimation semble être de l’ordre de 5 à 10% d’après lacomparaison avec les données issues des boucles électromagnétiques.
VIII.3 Calibrage du modèle cinématique
Avant de pouvoir être utilisé pour simuler le comportement du trafic sur le siteétudié, le modèle cinématique doit d’abord être calibré. Pour cela, il faut définir lediagramme fondamental caractérisant les états d’équilibre du trafic et l’accélérationmaximale des véhicules.
VIII.3.1 Calibrage du diagramme fondamental
Un diagramme fondamental peut être défini par un ensemble de paramètres ayantune signification physique (cf. IV.2.1.b). Cependant, le fonctionnement du modèle de traficest influencé par la définition d’ensemble du diagramme plus que par la valeur individuelledes différents paramètres. Ainsi, il est important de noter que si au final le résultat ducalibrage d’un diagramme fondamental conduit à déterminer la valeur de ses paramètres,ceux-ci doivent être considérés avant tout comme caractérisant le comportement général dutrafic. Ceci explique pourquoi le calibrage du diagramme fondamental va être effectué
13 Lorsque plusieurs véhicules se présentent en x=200 sur une plage de 6 s, la moyenne harmonique desvitesses estimées a été reportée dans ce tableau.

Chapitre VIII : Validation expérimentale
231
globalement et non pas en essayant de définir indépendamment la valeur de chacun de sesparamètres.
VIII.3.1.a Filtrage des données
L’étendue du nuage de points représentant le diagramme (Q,K) correspondant auxdonnées brutes des boucles électromagnétiques (cf. Figure VIII.4) s’explique par laprésence de résultats de mesures pouvant être considérés soit comme aberrants soit commenon représentatifs d’un état d’équilibre. Plusieurs causes peuvent être identifiées :
- L’agrégation des données sur une période de 30 s peut regrouper descomportements de trafic très différents lorsque l’état du trafic n’est pas stable. Parexemple, un véhicule qui stationne sur la boucle durant 15 des 30 secondes de lapériode d’agrégation et qui est seul à traverser la boucle va conduire à une mesure dedébit de 120 véh.h-1 pour un taux d’occupation de 50% et une concentration de0,11 véh.m-1. Ce point ne correspond pas à un état d’équilibre du trafic ;
- Certains points correspondent à des situations de trafic transitoires ;
- Les boucles ne sont pas des capteurs de grande précision et des problèmes defonctionnement peuvent conduire à des points erronés.
Il est donc nécessaire de filtrer les données pour ne conserver que celles qui sontréellement significatives. Le diagramme fondamental étant composé de deux partiesdistinctes (fluide et congestionné), la sélection des données et le calibrage vont êtreeffectués de manière indépendante pour chacune des parties. Il est pour cela nécessaire dedéfinir a priori une zone dans laquelle se situe la concentration critique Kc. L’observationdes données expérimentales brutes (cf. Figure VIII.4) montre assez nettement que le débitmaximal est atteint pour des concentrations comprises entre 0,07 et 0,09 véh.m-1.L’ensemble des données correspondant à des concentrations inférieures à 0,09 véh.m-1 seradonc considéré représenter les états fluides du trafic. Les données associées à desconcentrations supérieures à 0,07 véh.m-1 caractérisent les états congestionnés. La plage[0,07 0,09] est utilisée dans les deux groupes de données afin de définir une zone derecouvrement potentiel des diagrammes représentant chaque partie. La valeur précise de laconcentration critique sera déterminée comme l’intersection des deux courbes.
L’analyse statistique des données correspondant à la partie fluide fait apparaître unedifférence importante de représentativité des différentes concentrations mesurées pour undébit donné (cf. Figure VIII.7a) : un pic autour du point d’occurrence maximale estnettement visible. L’état d’équilibre pouvant être considéré comme le comportementdominant du trafic en fluide, il est possible de sélectionner les données en ne gardant quecelles ayant une fréquence d’apparition suffisante. Pour chaque niveau q de débit observé,la concentration ayant le nombre d’occurrences Nmax(q) le plus élevé est identifiée. Seulesles concentrations ayant un nombre d’occurrences supérieur à 60% de Nmax(q) sontconservées pour constituer l’échantillon des données significatives caractérisant la partiefluide du diagramme fondamental.
La méthodologie définie pour filtrer les données correspondant à la partie fluide dudiagramme fondamental ne peut être appliquée à celle définissant la partie congestionnée.En effet, le nombre d’occurrences de chaque concentration est très faible (de l’ordre de

Estimation dynamique du bruit émis par le trafic
232
1 à 5), ce qui ne permet pas de définir la concentration d’occurrence maximale. Ladistribution des concentrations pour un débit donné est très étalée (cf. Figure VIII.7b) carla quasi-totalité des points regroupant plusieurs comportements du trafic en 30 s oucorrespondant à des situations transitoires du trafic est classée dans les situationscongestionnées. De plus, l’observation de périodes de trafic dense étant rare, les pointscaractérisant cet état sont nettement sous-représentés par rapport à ceux définissant un étatfluide (17 fois moins nombreux).
0 0.02 0.04 0.06 0.080
200
400
600
800
1000
1200
1400
Concentration K [véh/m]
Nb
d’oc
curr
ence
Q=240 véh/h
a: Etat fluide
0.1 0.15 0.2 0.25 0.3 0.35 0.40
1
2
3
4
5
Concentration K [véh/m]
Nb
d’oc
curr
ence
Q=240 véh/h
a: Etat congestionné
Figure VIII.7: Distributions des concentrations mesurées pour un débit de 240 véh.h-1
Pour déterminer les données significatives de la partie congestionnée dudiagramme, il faut identifier les mesures qui correspondent à une congestion stable durantla période d’agrégation de 30 s. Ces mesures sont corrélées à l’observation deconcentrations élevées. La sélection des données est donc effectuée en ne conservant, pourchaque niveau de débit observé, que les concentrations comprises entre 90% et 100% de laconcentration maximale mesurée.
VIII.3.1.b Ajustement du diagramme fondamental
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
500
1000
1500
2000
2500
3000
3500
4000
Concentration K [véh/m]
Déb
it Q
[véh
/h]
Sélection partie fluideSelection partie congestionnéeDiagramme fondamental ajusté
Figure VIII.8: Diagramme fondamental ajusté
La sélection des données pour les deux parties du diagramme est présentée à laFigure VIII.8. L’analyse de ces données permet de définir la forme du diagrammefondamental. Après le test de plusieurs formes possibles, il apparaît qu’une parabole de

Chapitre VIII : Validation expérimentale
233
type Q=aK²+bK fournit un bon ajustement dans la partie fluide (coefficient dedétermination r² égal à 0,996). Cette équation n’a pas de terme constant car le diagrammepasse par l’origine. Pour la partie congestionnée, le diagramme fondamental devant êtreconvexe, la forme de la courbe qui semble la plus appropriée est une droite de typeQ=p1K+p2 (coefficient de détermination r² égal à 0,933). Les valeurs numériques del’ajustement des coefficients a, b, p1 et p2 sont reportées dans le Tableau VIII.3.
Paramètres Valeur Intervalle de confianceà 95%
Estimation del’erreur 14
a -100,2 [véh-1.m2.s-1] [-100,6 ; -99,8] 0,44%b 20,01 [m.s-1] [-19,995 ; 20,025] 0,08%p1 -2,752 [m.s-1] [-2,789 ; -2,715] 1,34%p2 1,178 [véh.s-1] [1,168 ; 1,186] 0,78%
Tableau VIII.3: Résultats de l’ajustement des données définissant le diagramme fondamental
A partir des résultats de l’ajustement, il est possible de calculer les paramètrescaractéristiques du diagramme fondamental. La concentration critique Kc est définie parl’intersection des deux portions du diagramme :
( ) ( )2
1 1 221 2
4
2c c c c
p b b p apaK bK p K p K
a
− + − ++ = + ⇒ = (VIII.8)
Les autres paramètres caractéristiques s’obtiennent par identification en utilisant lesdéfinitions fournies à l’annexe 5. Le Tableau VIII.4 présente les valeurs numériques desdifférents paramètres. Ces valeurs ont déjà été utilisées dans cette thèse pour illustrer lesdifférentes simulations proposées.
Définition ValeurKc cf. VIII.8 7,983.10-2 [véh.m-1]
Kmax -p2/p1 0,428 [véh.m-1]Vlmax b 20 [m.s-1]
Vc aKc+b 12 [m.s-1]Qmax KcVc 3450 [véh.h-1] ou 0,958 [véh.s-1]
Tableau VIII.4: Valeurs des paramètres caractéristiques du diagramme fondamental calibré
Il a déjà été expliqué pourquoi les paramètres du diagramme sont calibrésglobalement et non individuellement. Il est cependant important de remarquer que lesvaleurs numériques obtenues pour chaque paramètre sont physiquement vraisemblablespour une route à deux voies de circulation. Ceci garantit la cohérence du diagramme et desétats de trafic qu’il représente.
VIII.3.1.c Précision du diagramme fondamental ajusté
Connaissant l’erreur commise lors de l’ajustement des différents coefficients dudiagramme fondamental (cf. Tableau VIII.3), il est possible de déterminer l’incertituderésultante sur les différents paramètres de celui-ci en différentiant les formules contenuesdans le Tableau VIII.4 (cf. Le Tableau VIII.5).
14 L’erreur est estimée à la moitié de la largeur de l’intervalle de confiance puis exprimée en écart relatif.

Estimation dynamique du bruit émis par le trafic
234
Calcul d’incertitude Estimation de l’incertitude relative
ûKc
( )( )
22 1
1 2c c
c
p K p b K a
p b aK
∆ + ∆ + ∆ + ∆− + +
2,99%
ûKmax2 1 1 2
21
p p p p
p
∆ − ∆2,12%
ûVlmax b∆ 0,08%
ûVc c cK a a K b∆ + ∆ + ∆ 1,58%
ûQmax c c c cV K K V∆ + ∆ 4,57%
Tableau VIII.5: Incertitudes sur l’estimation des paramètres du diagramme fondamental calibré
L’analyse du Tableau VIII.5 indique que les différents paramètres du diagrammefondamental sont estimés avec une précision satisfaisante. En effet, d’après l’étude de lasensibilité du modèle de trafic à la relation d’équilibre menée au chapitre VI (cf. VI.4.2),l’erreur relative ûrV commise sur l’estimation de la vitesse du flux peut être bornée par :
max
11 max
(en fluide)
1 (en congestion)
r r r c r c
r r r
V Vl V K
pV p K
V
∆ ≤ ∆ + ∆ + ∆ ∆ ≤ ∆ + ∆ −
En appliquant ces formules aux résultats numériques obtenus, l’erreur relative surla vitesse apparaît être toujours inférieure à 4,6% en fluide et inférieure à 5,6%, pour desvitesses supérieures à 3 m.s-1, lorsque le trafic est congestionné. Pour mémoire, l’étude dela sensibilité du modèle d’estimation dynamique du bruit (cf. Chapitre VII – VII.1.5)conclut que l’erreur relative sur la vitesse doit être inférieure à 6% pour garantir une erreursur le niveau d’émission de bruit inférieure à 1 dB(A), une erreur inférieure à 10% restantacceptable.
L’analyse du Tableau VIII.5 fournit un autre résultat important. L’incertituderelative sur la vitesse libre Vlmax est plus faible que celle sur la vitesse critique Vc qui estelle-même plus faible que celle sur la concentration critique Kc. L’ordre d’importance desincertitudes sur ces paramètres est donc exactement inverse à celui de leur impact négatifsur l’estimation de la vitesse du flux (cf. VI.4.2.a). L’erreur sur l’estimation de la vitessedans la partie fluide du diagramme est ainsi globalement moindre que la borne maximaleproposée ci-dessus.
Les calculs d’incertitude réalisés dans ce paragraphe doivent cependant êtrerelativisés. En effet, ils ne sont valables que si les deux hypothèses suivantes sontvérifiées :
- L’échantillon des mesures sélectionnées parmi les données boucles représenteeffectivement les états d’équilibre ;
- Les erreurs de mesures et de modélisation (différence entre la courbe réelle etl’ajustement utilisé) suivent une loi normale de moyenne nulle.
Si la précision de la mesure des débits par les boucles électromagnétiques apparaîtbonne, celle du taux d’occupation et donc celle de la concentration est de l’ordre de 10%(cf. VIII.1.3). Il n’est donc pas certain que les erreurs de mesures se compensent. De plus,

Chapitre VIII : Validation expérimentale
235
le diagramme fondamental caractérise une relation phénoménologique et non une loidérivée d’un processus physique. La forme de la courbe d’équilibre exacte ne peut doncpas être connue et il est difficile de juger précisément de la pertinence de la forme de lacourbe d’ajustement retenue.
Il convient donc de rester prudent sur les conclusions tirées à partir des calculsd’incertitude. En effet, la qualité manifeste de l’ajustement du diagramme ne garantit pasforcément que les écarts sur les différents paramètres qui le constituent sont parfaitementestimés. Il existe cependant une marge d’erreur supplémentaire admissible sur cesestimations qui ne remet pas en cause le fonctionnement du modèle d’estimationdynamique du bruit. En effet, une erreur relative sur la vitesse de 10% est acceptable alorsque celle-ci est évaluée au maximum à 6% d’après le calcul des incertitudes.
VIII.3.2 Calibrage de l’accélération maximale
Le modèle de trafic cinématique borne l’accélération maximale des véhicules. Cetteborne est utilisée à la fois pour contraindre la dérivée particulaire de la vitesse du flux etpour décrire la trajectoire du premier véhicule d’un peloton qui redémarre (cf. Chapitre V).Cette valeur d’accélération peut être calibrée en étudiant le comportement des deuxvéhicules situés en première ligne au droit du feu (le tronçon étudié comporte deux voiesde circulation). Ces véhicules n’étant pas gênés par le trafic devant eux, ils peuventaccélérer à leur guise.
0
0.5
1
1.5
2
Acc
élér
artio
n [m
/s²]
0.57 0.
69 0.79
0.8
0.81 0.86 0.
92
0.93
0.94 0.99
1 1.05 1.08
1.08
1.09 1.
2 1.25 1.
32
1.33 1.37
1.54
1.87
A15 A4
A8
A21 A1
A5
A22
A14
A11 A2
A10
A17
A19 A3
A18
A16
A20
A13 A7
A9
A12 A6
Scénario
Amax,moy
=1.06 m/s²
Ecart type=0.29 m/s²It. confiance 95%=0.12 m/s²
Véh 1Véh 2
Figure VIII.9: Accélération des deux premiers véhicules de chaque scénario de redémarrage au feu
Lors de la reconstitution des trajectoires des véhicules, l’accélération des deuxpremiers véhicules de la file d’attente, indicés 1 et 2, a été déterminée (cf. VIII.2.2.a). LaFigure VIII.9 présente la synthèse des valeurs numériques obtenues. Il apparaît que lesvaleurs d’accélération au redémarrage varient de manière significative d’un scénario àl’autre. Pour un scénario donné, il est possible de définir l’accélération maximale commela valeur la plus forte de l’accélération des deux premiers véhicules. En effet, c’est levéhicule le plus en avant qui contraint la progression du flux à moins que celui-ci soitdoublé par un autre véhicule positionné plus en amont dans la file d’attente.
La simulation par le modèle de trafic du redémarrage des véhicules peut êtreeffectuée en utilisant la valeur de l’accélération maximale adaptée au scénario étudié. Ceci

Estimation dynamique du bruit émis par le trafic
236
permet d’affiner les résultats fournis par le modèle de trafic car la sensibilité de la vitessedu flux à la valeur de l’accélération maximale est importante durant la phase deredémarrage (l’erreur relative sur la vitesse est égale à la moitié de l’erreur relative surl’accélération cf. VI.4.3).
Cependant, pour pouvoir envisager une utilisation opérationnelle du modèled’estimation dynamique du bruit il est nécessaire de définir une accélération maximalemoyenne qui puisse être utilisée pour simuler le comportement du trafic en aval d’un feutricolore sans nécessiter de mesures spécifiques de l’accélération. Pour les 22 scénariosrecensés, l’accélération maximale moyenne est égale à 1,06 m.s-2 avec un intervalle deconfiance à 95% égal à 0,12 m.s-2. La dispersion est importante ce qui explique la largeurélevée de l’intervalle de confiance.
L’échantillon de scénarios dépouillés est trop petit pour que des conclusionsdéfinitives puissent être tirées sur la valeur moyenne de l’accélération des premiersvéhicules en aval d’un feu et sur la dispersion de ces valeurs. Dans le cadre de cette étudedestinée à valider le comportement du modèle d’estimation dynamique du bruit, chaquescénario sera associé à la valeur de l’accélération maximale observée pour celui-ci. Desmesures plus complètes sur l’accélération des véhicules au moment du redémarragedevront être effectuées pour déterminer le comportement moyen de cette variableimportante pour le fonctionnement global du modèle.
VIII.4 Étude de la cinématique des véhicules au redémarrage
Le modèle de trafic étant calibré, il est maintenant possible de comparer les profilscinématiques simulés aux données relevées sur le terrain. Cette étude va permettre devalider la représentation par le modèle de trafic de la vitesse des véhicules lors duredémarrage d’un peloton.
VIII.4.1 Estimation de la demande associée aux différents scénarios
Pour simuler le comportement du trafic correspondant aux scénarios enquêtés sur leterrain, il faut estimer la demande effective sur le réseau au moment où chacun d’entre euxs’est déroulé. La durée d’un scénario n’excédant pas 1 min 30, la demande en entrée dutronçon est supposée constante durant ce laps de temps.
Pour déterminer la valeur D de la demande, les données fournies par la camérasituée à 20 m en amont du feu sont utilisées. Celle-ci relève les instants de passage del’ensemble des véhicules qui sont perturbés par le passage du feu au rouge. Elle permetdonc de connaître l’intervalle de temps ûTsc qui sépare l’arrivée sur le tronçon étudié dupremier et du dernier véhicule qui constituent un scénario donné. La demande peut alorsêtre estimée par le rapport entre le nombre total Nt de véhicules entrés sur le tronçon durantce scénario et cet intervalle de temps :
t
sc
ND
T=
∆
La Figure VIII.10 présente le résultat des calculs de demande effectués pour lesdifférents scénarios. Ceux-ci sont classés par niveau de débit entrant croissant.

Chapitre VIII : Validation expérimentale
237
0
0.1
0.2
0.3
0.4
0.5
0.6
Dem
ande
[véh
/s]
0.19
0.24
0.29 0.3
0.3 0.31
0.31 0.
33 0.34 0.
37 0.4 0.41 0.
43
0.43
0.43
0.48 0.49 0.5 0.51 0.
55 0.56
0.56
A18
A19 A4
A22
A10
A14
A20 A3
A11 A2
A21 A1
A17 A5
A6
A12 A8
A9
A13
A15 A7
A16
Scénario
Figure VIII.10: Estimation de la demande en entrée du réseau pour les différents scénarios
VIII.4.2 Comparaison des résultats de simulation aux données terrain
VIII.4.2.a Synchronisation des résultats de simulation et des données terrain
Lors d’une simulation, le premier véhicule de la file d’attente (situé en xs=0) a unevitesse initiale nulle à l’instant ts=0 où le feu passe au vert. La trajectoire reconstituée de cemême véhicule pour un scénario expérimental donné permet de déterminer l’instant t0 où ilfranchit le point de mesure situé au droit du feu en x=0 ainsi que sa vitesse V0 en ce point.Les valeurs V0 issues du traitement des données expérimentales sont toujours positives cequi montre que le premier véhicule a déjà commencé à démarrer avant de franchir la lignede feu.
Deux explications peuvent être données à ce phénomène. Tout d’abord, il estapparu lors de la réalisation de l’expérimentation que les premiers véhicules s’arrêtentrarement au droit du feu. Ils préfèrent le plus souvent stationner 2 à 3 mètres en amont pourprofiter de l’ombre des arbres (l’expérimentation s’est déroulée à Toulouse au mois deJuin) ou pour regarder le dispositif expérimental. Ensuite, pour des raisons pratiques15 dedépouillement, les instants de passage sont relevés au moment où l’arrière des véhiculesfranchit les points de mesure. Ce mode de dépouillement ne modifie pas la vitesse desvéhicules mais introduit un décalage temporel avec les résultats de simulation quiconsidèrent un premier véhicule ponctuel et qui estiment donc plutôt les instants depassage de l’avant de ce véhicule.
Pour permettre la comparaison des résultats de simulation avec les données terrain,ces dernières sont synchronisées afin que l’origine des points de mesure corresponde àl’endroit où le premier véhicule a une vitesse nulle et que l’origine des temps soit l’instantde démarrage de ce véhicule. En notant x la position d’un point de mesure et t l’instant depassage d’un véhicule en ce point, les données synchronisées (x’,t’) s’obtiennent par latranslation définie par le système VIII.9.
15 La caméra filmant longitudinalement les 50 premiers mètres en amont du feu était située en amont du feuet avait donc une vue arrière du trafic.

Estimation dynamique du bruit émis par le trafic
238
20
00
1'
2
'
Vx x
AV
t t tA
= −
= − −
(VIII.9)
V0 : Vitesse du premier véhicule au passage du point de mesure situé en x=0t0 : Instant du passage du premier véhicule en x=0A : Accélération du premier véhicule
VIII.4.2.b Résultats des comparaisons
L’évolution temporelle de la vitesse du flux simulée par le modèle de trafic a étécomparée aux vitesses réelles des véhicules en quatre points en aval du feu pour les 22scénarios de redémarrage. Deux de ces points sont choisis dans la zone d’accélération fortedes véhicules juste en aval du feu (x=20 m et x=40 m). Les deux autres points (x=100 m etx=200 m) sont situés plus loin du feu à l’endroit où le peloton de véhicules atteint savitesse désirée et où celui-ci commence à s’étaler sur le réseau. La définition de ces quatrepoints permet de couvrir les différents types de comportement d’un ensemble de véhiculesqui redémarrent après un feu tricolore.
Seuls les profils cinématiques des scénarios A22 et A2 vont être présentés dans cechapitre (Figure VIII.11 et Figure VIII.12). Les graphiques correspondant aux autresscénarios sont reportés à l’Annexe 10. Le scénario A15 a été éliminé de la liste car lecomportement des véhicules, observé sur le terrain pour celui-ci, présente des incohérences(cf. Annexe 10).
5 10 15 20 25 30 350
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
a: x= 20
terrainsimulation
5 10 15 20 25 30 350
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
b: x= 40
terrainsimulation
15 20 25 30 35 400
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
c: x= 100
terrainsimulation
20 25 30 35 40 450
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
d: x= 200
terrainsimulation
Figure VIII.11: Validation du modèle cinématique (Scénario A22 – D=0,297 véh.s-1 – A=0,92 m.s-2)

Chapitre VIII : Validation expérimentale
239
5 10 15 20 250
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
a: x= 20
terrainsimulation
5 10 15 20 250
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
b: x= 40
terrainsimulation
10 15 20 25 300
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
c: x= 100
terrainsimulation
20 25 30 35 400
5
10
15
20
Temps écoulé depuis le passage au vert [s]
Vite
sse
[m/s
]
d: x= 200
terrainsimulation
Figure VIII.12: Validation du modèle cinématique (Scénario A2 – D=0,371 véh.s-1 – A=0,99 m.s-2)
L’analyse d’ensemble des graphiques montre que les résultats de simulations’accordent plutôt bien avec les vitesses calculées à partir des mesures sur le terrain. Laforme générale de la courbe est bien respectée aux différents points de comparaison. Lepassage du peloton est clairement identifié par une diminution de la vitesse observée. Leretour à un trafic fluide est ensuite caractérisé par une augmentation marquée de la vitesse.
L’étude de la synchronisation entre simulation et terrain des instants de passage dupremier véhicule aux différents points permet de vérifier que la procédure reproduisant latrajectoire de ce véhicule dans le modèle de trafic fonctionne correctement. Lasynchronisation est effective pour 17 des 21 scénarios. Pour ceux nommés A21, A17, A6et A8, il apparaît qu’un véhicule double le premier véhicule quelque part durant les 200premiers mètres. Pour représenter fidèlement le comportement de l’avant du peloton dansces quatre cas, il faudrait changer le comportement du premier véhicule dans la simulationau moment où celui-ci se fait doubler sur le terrain pour conserver à tout instant le bonpremier véhicule. Cette modification n’a pas été effectuée car l’important est de modéliserle comportement d’un premier véhicule moyen et non pas de savoir reproduire un scénariode trafic donné de manière précise.
Le retour à l’état fluide après le passage du peloton est modélisé de manièresatisfaisante par le modèle de trafic pour les scénarios où le nombre de véhicules enquêtésest suffisant pour observer ce phénomène (A19/A10/A20 et A1 par exemple). Ceci montred’une part que les estimations de la demande en entrée sont correctes puisque la taille dupeloton est reproduite de manière satisfaisante et d’autre part que le modèle représente bienle redémarrage et la propagation des véhicules en aval du feu. Ceci va être confirmé par

Estimation dynamique du bruit émis par le trafic
240
l’étude des valeurs numériques de la vitesse du flux estimées par le modèle de trafic pourles véhicules constituant le peloton.
De manière générale et quel que soit le point de comparaison étudié, l’analyse desrésultats de simulation montre que l’estimation de la vitesse par le modèle de trafic estassez proche des mesures de vitesse effectuées sur le terrain. L’écart est régulièrementinférieur à 1 à 2 m.s-1 et rarement supérieur à 3 m.s-1. Pour essayer de quantifier la qualitédes profils cinématiques reproduits par le modèle, il est possible de calculer pour chaquescénario aux différents points de comparaison l’écart absolu moyen entre la vitesse simuléeet la vitesse des différents véhicules au moment de leur passage. Ces écarts ainsi quel’écart moyen pour l’ensemble des scénarios (noté global) sont présentés à la FigureVIII.13.
0
0.5
1
1.5
2
2.5
3
3.5
Eca
rt m
oyen
[m/s
]
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A16
A17
A18
A19
A20
A21
A22
Glo
bal
Scénario
x=20 mx=40 m
0
0.5
1
1.5
2
2.5
3
3.5
Eca
rt m
oyen
[m/s
]
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A16
A17
A18
A19
A20
A21
A22
Glo
bal
Scénario
x=100 mx=200 m
Figure VIII.13: Ecart absolu moyen entre les valeurs de vitesse simulées et les résultats expérimentaux
L’analyse des écarts moyens confirme la qualité satisfaisante des profilscinématiques reproduits par le modèle de trafic. L’écart moyen est en effet de 1,95 m.s-1 enx=20 m, de 1,76 m.s-1 en x=40 m, 1,37 m.s-1 en x=100 m et de 1,75 m.s-1 en x=200 m pourl’ensemble des scénarios. Ces valeurs sont à rapprocher de la précision de l’estimation dela vitesse réelle des véhicules à partir des trajectoires reconstituées et de celle de la vitessesimulée par le modèle de trafic qui sont toutes deux de l’ordre de 5 à 10%.
Certains scénarios présentent cependant des écarts sensiblement supérieurs à lamoyenne des autres scénarios. Deux phénomènes expliquent ces résultats :
- Le comportement des deux voies de circulation est visiblement dissocié. Unvéhicule plus lent (camionnette…) sur la voie de droite ralentit le redémarrage d’unepartie du peloton. Les autres doublent par la gauche et ont donc des vitesses plusélevées. Ce cas de figure se présente pour les scénarios A21, A12 et A8 ;
- La demande en entrée n’est pas constante durant le scénario. Un intervalle detemps de 5 à 6 secondes sépare l’arrivée de deux groupes de véhicules. Le premiergroupe a tendance à redémarrer plus rapidement que la file d’attente prévue par lemodèle car la demande équivalente sur cette partie du scénario est plus faible que lademande estimée alors que le deuxième groupe se déplace plus lentement car il estplus compact. C’est le cas par exemple des scénarios A20 et A16.

Chapitre VIII : Validation expérimentale
241
Ces situations correspondent à des comportements particuliers du trafic que lemodèle ne sait pas représenter. Ce n’est de toute façon pas son objectif, puisqu’il est conçupour modéliser le comportement moyen des véhicules, lors des redémarrages, lorsquel’écoulement peut être considéré comme homogène. A ce titre il fournit de bons résultatspour les scénarios où tous les véhicules sont des véhicules légers qui ne présentent pas dedisparités marquées dans leur comportement.
VIII.4.3 Conclusion
La comparaison des résultats de simulation aux données relevées lors duredémarrage de pelotons de véhicules à un feu permet de conclure au bon fonctionnementde la prise en compte de l’accélération bornée des véhicules par le modèle de trafic. Lesdifférentes phases comprenant l’accélération du peloton, son étalement à l’intérieur duréseau et le retour à l’état d’équilibre sont représentées correctement avec des écarts entrerésultats de simulation et données terrain inférieurs en moyenne à 7 km.h-1.
Ces écarts devraient être encore réduits s’il était possible de confronter les résultatsde simulation à une définition moyenne du comportement des véhicules lors d’un ensemblede redémarrages avec le même débit en entrée. En effet, le modèle de trafic est conçu pourle comportement moyen d’un flux de trafic et pas une réalisation donnée d’un scénario. Lenombre de scénarios dépouillés lors de cette expérimentation est cependant trop faible pourréaliser une telle étude.
Enfin, il est important de rappeler que les résultats de ce paragraphe ont été obtenusen affectant l’accélération maximale observée pour chaque scénario au premier véhicule dumodèle de trafic. Dans le cadre d’une utilisation plus opérationnelle du modèle, il faudradéfinir une accélération maximale moyenne suffisamment représentative. Ceci nécessite lamise en place d’une campagne de mesure appropriée.
VIII.5 Comparaison des mesures acoustiques aux résultats du modèle
La validation acoustique du modèle d’estimation dynamique du bruit va êtreeffectuée en comparant les mesures de niveaux de pression LAeq(1s), réalisées en quatrepoints en aval du feu tricolore, avec les résultats de simulation pour les différents scénariosenregistrés. Ce modèle se basant sur une description macroscopique du trafic pour estimerles niveaux de bruit, il est également intéressant d’essayer de regrouper les enregistrementsacoustiques des scénarios présentant des caractéristiques de trafic homogènes pour étudierle comportement sonore d’une moyenne de scénarios.
Les travaux présentés dans cette partie ont été réalisés en collaboration avec JoëlLelong du Laboratoire Transports et Environnement de l’INRETS.
VIII.5.1 Résultats acoustiques des différents scénarios enregistrés
L’évolution temporelle des LAeq(1s) simulée par le modèle en x=0, x=25, x=50 etx=100 m a été comparée aux enregistrements recueillis par les sonomètres pour les 16scénarios de redémarrage pour lesquels des mesures acoustiques sont disponibles. Lessonomètres étant disposés sur le terrain à 4 m du milieu de la voie de circulation de droite

Estimation dynamique du bruit émis par le trafic
242
et à 1,2 m de hauteur (cf. VIII.1.2.b), la distance entre la ligne source et les points de calculest fixée à 4,2 m dans le modèle. Un bruit de fond constant de niveau égal à 45 dB(A) estintroduit dans le modèle pour représenter l’environnement sonore du site étudié.
Comme lors de la validation des profils cinématiques en aval du feu, le moment oùle premier véhicule redémarre dans la réalité n’est pas connu avec précision. Or, cet instantest l’origine du redémarrage du peloton dans le modèle de trafic. Pour comparer lesrésultats acoustiques obtenus par simulation avec les mesures terrain, l’instant où le pic debruit associé au redémarrage du peloton apparaît sur le sonomètre situé au droit du feu estcalé avec l’instant où ce même pic est observé en x=0 m en simulation. Ceci permet degarantir une origine des temps identique entre les mesures et les résultats de simulation.
Seul le graphique correspondant au scénario A5 (cf. Figure VIII.14) va êtreprésenté dans ce chapitre. Les graphiques représentant les résultats de la comparaison desmesures terrain avec les résultats de simulation pour les 15 autres scénarios sont reportésen Annexe 11.
0 10 20 30 40 50 6050
60
70
80
droi
t du
feu
LAeq
(1s)
[dB
(A)]
0 10 20 30 40 50 6050
60
70
80
LAeq
(1s)
[dB
(A)]
25 m
ava
l
0 10 20 30 40 50 6050
60
70
80
50 m
ava
l
LAeq
(1s)
[dB
(A)]
0 10 20 30 40 50 6050
60
70
80
Temps [s]
100
m a
val
LAeq
(1s)
[dB
(A)]
Enregistrement sonomètreRésultat simulation
Figure VIII.14: Validation acoustique du modèle (Scénario A5 – D=0,429 véh.s-1 – A=0,88 m.s-2)16
La comparaison des enregistrements terrain et des résultats de simulation est trèsdélicate pour les raisons suivantes :
- A la distance de la voie où les sonomètres sont situés l’approximation du flux detrafic par une ligne source n’est pas valide. Les niveaux de bruit enregistrés fluctuent
16 L’origine des temps sur ces graphiques est arbitraire.

Chapitre VIII : Validation expérimentale
243
donc en fonction de la position des véhicules sur le réseau et atteignent des maximalocaux lorsqu’un véhicule est situé au droit d’un sonomètre. Le modèle d’estimationdynamique du bruit ne représente pas ce phénomène car les niveaux de bruit LAeq(1s)qu’il calcule sont associés à un comportement moyen du trafic (cf. VII.1.3.b) ;
- La composition du flux de trafic n’est pas parfaitement homogène dans la réalitémalgré l’élimination lors de la sélection des scénarios à dépouiller des situations oùdes véhicules particuliers (autobus, camions…) se présentent au feu. Des petitsutilitaires ou des véhicules légers de conception ancienne peuvent être à l’origine deniveaux de bruit localement plus importants par rapport aux niveaux simulés ;
- Le trafic circulant en sens inverse (sens Sud-Nord) n’est pas pris en compte. Si cetrafic ne gêne en rien la circulation sur le tronçon de voie étudié (sens Nord-Sud), ilcontribue aux niveaux de bruit globaux enregistrés par les sonomètres. Le trafic surcette voie est difficile à prendre en compte car il est fortement discontinu étant donnéqu’un feu tricolore se situe à 100 m en amont en direction du Sud (cf. Figure VIII.1).Il existe donc des périodes de temps sans aucun trafic sur cette voie et où les mesuresde bruit ne sont pas perturbées mais aussi d’autres périodes où des paquets devéhicules circulent générant leur propre bruit. Ce phénomène est particulièrementvisible lorsque le trafic est interrompu sur la voie principale par le feu piéton. Lespériodes de calme prévues par le modèle d’estimation dynamique des nuisancesn’apparaissent que partiellement sur les enregistrements terrain à cause du trafic surla voie opposée (cf. Figure VIII.14 – x=25 m et 0�t��� s, x=50 m et 0�t��� s,x=100 m et 0�t��� s).
- Lors de la sélection des scénarios, la composition du trafic sur la voie opposée n’apas été prise en compte. L’analyse des enregistrements montre que des véhiculesparticulièrement bruyants (de type poids lourds) circulent sur cette voie pour certainsscénarios (A22 par exemple cf. Annexe 12) ;
- Le débit n’est pas toujours constant ni soutenu sur le tronçon étudié (sens Nord-Sud) durant toute la durée d’un scénario. Ce phénomène se traduit lors de lacomparaison des mesures acoustiques avec les résultats de simulation par undécrochage du niveau de bruit enregistré. Cette absence de véhicules après le passagedu peloton apparaît plus nettement lors de la validation acoustique du modèle quelors de la validation de ses profils cinématiques car les niveaux de bruit sontenregistrés en continu contrairement à l’estimation de la vitesse des véhicules qui esteffectuée ponctuellement au passage de certains points.
En tenant compte des phénomènes parasites listés ci-dessus, il est possible demettre en évidence la cohérence qui existe entre les sorties acoustiques du modèle et lesenregistrements effectués sur le terrain. Tout d’abord, les graphiques correspondant auxniveaux de pression reçus aux points d’abscisses x=25, x=50 et x=100 m montrent que,pour la quasi-totalité des scénarios, la frontière entre la période de calme et le passage dupeloton est modélisée correctement. Pour mettre en évidence ce résultat sur les graphes oùla simulation n’estime pas correctement le niveau de bruit durant la période de calme(présence de véhicules sur la voie opposée), il faut vérifier que l’instant où le niveau debruit simulé augmente ainsi que la pente de la courbe à cet endroit est bien conforme ausignal enregistré par les sonomètres. En effet, lorsque le niveau de bruit durant la périodede calme est très différent du niveau mesuré, la courbe simulée semble être en retard parrapport aux enregistrements lors du passage du peloton (cf. Figure VIII.14 – x=50 m) alorsqu’elle est parfaitement synchronisée (le niveau de bruit initial est simplement plus faible).

Estimation dynamique du bruit émis par le trafic
244
Ensuite, il apparaît que les niveaux de bruit estimés au passage du peloton en x=25,x=50 et x=100 m ainsi que les niveaux de bruit correspondant au trafic fluide observé aprèsle passage de ce peloton sont cohérents avec les mesures effectuées sur le terrain àcondition que le trafic soit suffisamment soutenu. Si cette condition n’est pas vérifiée, unechute des niveaux de bruit mesurés est observée après le passage du peloton (scénario A5par exemple cf. Figure VIII.14). Elle correspond à une absence temporaire de véhicules seprésentant devant les sonomètres. Pour éviter ce problème, il suffit de modéliser plusfinement la demande en entrée de chaque scénario.
Les fluctuations de faibles amplitudes (< 2 à 3 dB(A)) des niveaux de bruit mesurésaux points d’abscisses x=25, x=50 et x=100 m par rapport aux résultats de simulations’expliquent par l’effet acoustique ponctuel de chaque véhicule lorsqu’il se trouve au droitdes sonomètres. Les fluctuations d’amplitudes plus importantes peuvent quant à elles avoirpour origine la présence de véhicules sur la voie opposée. Il n’est d’ailleurs pas rared’observer la propagation de l’aval (x=100 m) vers l’amont (x=0 m) pour des tempscroissants de pics locaux de bruit qui caractérisent des groupes de véhicules se déplaçantdans l’autre sens de circulation.
Le modèle d’estimation dynamique du bruit semble donc déterminer de manièrecohérente les niveaux de bruit associés au déplacement d’un peloton de véhicules en avald’un feu tricolore. Ce résultat confirme la bonne représentation de la cinématique desvéhicules par le modèle de trafic qui sert de support à ce modèle global. Il montreégalement que les lois d’émission utilisées caractérisent de manière satisfaisante lecomportement acoustique du flux de trafic et que le modèle de rapport de boîte ne présentepas de comportements aberrants pour cette gamme de vitesse (V>20 km.h-1, le premierpoint de comparaison étant situé 25 m en aval du feu).
Au droit du feu, le modèle d’estimation dynamique du bruit représentecorrectement la durée du pic de bruit correspondant au redémarrage des véhicules àl’exception des scénarios A18, A19 et A22. Il est difficile d’expliquer en quoi ces troisscénarios se distinguent si ce n’est qu’ils correspondent tous trois à des demandes faibles.La demande réelle est peut être sous estimée pour ces scénarios ou alors l’effet de la voieopposée est plus important étant donné que peu de véhicules circulent sur la voieprincipale. Les niveaux de bruit estimés par le modèle durant ce pic de bruit sont toujourslégèrement supérieurs aux niveaux mesurés avec des écarts d’autant plus élevés que lademande et l’accélération du premier véhicule sont importantes (l’écart maximum observéne dépasse pas les 3 à 4 dB(A)). Deux explications peuvent être avancées :
- Les lois d’émission surestiment l’effet de l’accélération pour les deux premiersrapports de boîte ;
- Le changement entre le 1er et le 2nd rapport s’effectue pour une vitesse trop élevéedans le modèle de rapport de boîte. Les véhicules sont ainsi considérés troplongtemps en 1ère ce qui surestime la contribution sonore due au moteur.
Des recherches complémentaires devront être menées pour vérifier ces deuxhypothèses et améliorer le fonctionnement global du modèle. Il paraît probable que le

Chapitre VIII : Validation expérimentale
245
modèle de rapport de boîte soit en cause car il n’a pas été calibré avec un ensemble dedonnées suffisant.
L’analyse des différents scénarios montre que le modèle d’estimation dynamiquedu bruit représente de manière satisfaisante les phénomènes acoustiques liés auredémarrage d’un peloton de véhicules et à sa propagation en aval d’un feu tricolore. Pouravoir une idée plus précise de la pertinence des niveaux de bruit estimés par ce modèle, ilfaut essayer de regrouper les scénarios ayant des caractéristiques de trafic homogènes(demandes en entrée et accélération maximale du premier véhicule proches) afin dedéterminer le comportement acoustique moyen d’un peloton qui redémarre. Un telregroupement permet de s’affranchir des fluctuations du signal sonore dues aucomportement individuel des véhicules et de travailler avec une représentation del’écoulement du trafic cohérente avec celle utilisée dans le modèle d’estimation dynamiquedu bruit.
VIII.5.2 Regroupement des scénarios de caractéristiques de trafic homogènes
L’étude de la répartition des demandes en entrée, observées pour les 16 scénariosde redémarrage disposant de mesures acoustiques (cf. Figure VIII.10), permet de formerdeux groupes de 4 scénarios ayant des demandes voisines (cf. Tableau VIII.6). Pourchacun de ces groupes, l’accélération maximale du premier véhicule est calculée comme lamoyenne des accélérations maximales observées pour les scénarios qui le composent(cf. Tableau VIII.6).
scénarios Demandes respectives Demande moyenne Accélérationdu premier véhicule
Groupe 1 A21/A1/A5/A6 0,4/0,41/0,43/0,43 [véh.s-1] 0,417 [véh.s-1] 0,90 [m.s-2]Groupe 2 A12/A8/A9/A13 0,48/0,49/0,50/0,51 [véh.s-1] 0,495 [véh.s-1] 1,25 [m.s-2]
Tableau VIII.6: Définition des groupes de scénarios ayant des caractéristiques de trafic homogènes
Les enregistrements acoustiques des scénarios appartenant à un même groupe sontrecalés sur la même origine de temps grâce au pic de bruit observé sur le sonomètre situéen x=0. L’évolution des niveaux de pression moyens pour chacun des sonomètres estensuite obtenue en moyennant à chaque instant les niveaux mesurés pour les 4 scénarios decaractéristiques de trafic homogènes. Ceci permet d’estimer les niveaux de bruit reçu aux 4points de mesure qui correspondent à l’évolution moyenne du comportement des véhiculesface à une même situation de trafic.
Le nombre de scénarios dans chaque groupe n’est pas suffisant pour obtenir unereprésentation réellement significative de l’évolution moyenne du bruit reçu au bord de lavoie. Il faudrait pour cela disposer au minimum d’une dizaine d’enregistrements pour unmême niveau de demande en entrée du réseau. L’effet de la position individuelle desvéhicules reste donc perceptible sur les profils moyens de bruit déterminés pour chacun desgroupes. Le regroupement des scénarios permet cependant de limiter l’impact de cephénomène.
Une fois calculée l’évolution temporelle des LAeq(1s) moyens pour chaque groupe àl’endroit où se situent les 4 sonomètres, celle-ci peut être comparée avec les résultats de

Estimation dynamique du bruit émis par le trafic
246
simulation fournis par le modèle (cf. Figure VIII.15 pour le groupe 1 et Figure VIII.16pour le groupe 2).
Afin d’affiner le calcul des niveaux de bruit par le modèle, il est possible de tenircompte du trafic circulant sur la voie opposée. Pour ce faire, la demande sur cette voie estestimée grâce aux données relevées par la boucle électromagnétique qui, pour ce sens decirculation, se trouve en amont de la zone étudiée (cf. Figure VIII.1). Le débit apparaît surces relevés fortement discontinu. Une estimation de la demande uniforme D’ observée enmoyenne pour chacun des groupes de scénarios est cependant calculée afin de pouvoirsimuler le comportement acoustique du trafic sur cette voie de circulation. Cette demandevaut 0,28 véh.s-1 pour le premier groupe et 0,2 véh.s-1 pour le second groupe.L’accélération maximale est supposée constante et égale à celle observée dans l’autre sensde circulation. Cette valeur n’a de toute façon que peu d’importance car, dans ce cas, seulle comportement des véhicules en amont du feu tricolore influence les niveaux de bruitenregistrés par les sonomètres.
Grâce à ces données, il est possible de simuler le comportement acoustique du fluxcirculant en sens inverse17 par rapport à la voie principale étudiée. Les niveaux de bruitglobaux sont déterminés par sommation des puissances acoustiques reçues à chaque instantau niveau des différents sonomètres (cf. Figure VIII.15 et Figure VIII.16).
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
droi
t du
feu
LAeq
(1s)
[dB
(A)]
Moyenne enregistrements sonomètresSimulation voie principale uniquementSimulation avec trafic en sens inverse
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
LAeq
(1s)
[dB
(A)]
25 m
ava
l
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
50 m
ava
l
LAeq
(1s)
[dB
(A)]
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
Temps [s]
100
m a
val
LAeq
(1s)
[dB
(A)]
Figure VIII.15: Validation acoustique du modèle (Groupe 1 – D=0,417 véh.s-1 – A=0,9 m.s-2)
17 La ligne source caractérisant cette voie est supposée se situer au milieu de celle-ci, soit à une distance de7,8 m des sonomètres.

Chapitre VIII : Validation expérimentale
247
L’analyse de la Figure VIII.15 et de la Figure VIII.16 montre que le regroupementdes scénarios permet de mettre en adéquation les sorties du modèle d’estimationdynamique du bruit et les niveaux sonores mesurés. En effet, ces niveaux sont beaucoupmoins sensibles à la position individuelle des véhicules et le signal correspondant serapproche de celui déterminé par simulation. La prise en compte du trafic sur la voieopposée permet d’améliorer grandement l’estimation par le modèle des niveaux de bruitdurant la période de calme lorsque aucun véhicule ne circule sur la voie principale. Lademande sur la voie opposée apparaît cependant trop élevée pour le groupe n°1 descénarios car les niveaux de bruit estimés durant la période de calme sont supérieurs auxniveaux expérimentés pour les 4 sonomètres.
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
droi
t du
feu
LAeq
(1s)
[dB
(A)]
Moyenne enregistrements sonomètresSimulation voie principale uniquementSimulation avec trafic en sens inverse
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
LAeq
(1s)
[dB
(A)]
25 m
ava
l
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
50 m
ava
l
LAeq
(1s)
[dB
(A)]
0 5 10 15 20 25 30 35 40 45 5050
60
70
80
Temps [s]
100
m a
val
LAeq
(1s)
[dB
(A)]
Figure VIII.16: Validation acoustique du modèle (Groupe 2 – D=0,495 véh.s-1 – A=1,2 m.s-2)
Le pic de bruit en x=0 m apparaît surestimé par le modèle pour les deux groupes descénarios. Ce résultat déjà mis en évidence lors de l’étude individuelle des différentsscénarios est donc confirmé par l’analyse de l’évolution des niveaux de bruit moyensenregistrés au droit du feu. Ce point apparaît être le défaut principal du modèled’estimation dynamique du bruit car les résultats obtenus pour les trois sonomètres en avaldu feu sont très proches des profils moyens mesurés. Le début de l’augmentation desniveaux de bruit lors du passage du peloton après la période de calme est synchronisé à laseconde près entre les résultats de simulation et les enregistrements. Les niveaux observésdurant le passage de ce peloton ne s’écartent pas de plus de 2 dB des niveaux simulés quelque soit le sonomètre.
En aval du feu, il est intéressant de remarquer que l’absence de trafic sur la voieopposée pour une période de temps assez grande est visible sur les profils de niveau de

Estimation dynamique du bruit émis par le trafic
248
bruit moyen. Par exemple pour le deuxième groupe en x=25 m (cf. Figure VIII.16), lesniveaux mesurés apparaissent plus proches des niveaux simulés en tenant compte des deuxvoies entre t=30 et t=40 s mais correspondent mieux aux niveaux simulés en considérantuniquement la voie principale pour t>40 s.
Enfin, il est possible de qualifier plus précisément la qualité des sorties acoustiquesdu modèle en calculant pour chaque groupe de scénarios et pour chaque sonomètre l’écartde niveau de bruit moyen entre la simulation et les mesures à partir du début du passage dupeloton (début de l’augmentation des niveaux de bruit) jusqu’à la fin de la période decomparaison (cf. Figure VIII.17). La période de calme est éliminée de l’intervalle de tempssur lequel l’écart moyen est calculé car durant cette période les niveaux de bruit nedépendent pas du trafic sur la voie principale.
0
0.5
1
1.5
2
2.5
3
Eca
rt m
oyen
en
excl
uant
la p
ério
de d
e ca
lme
[dB
(A)]
x=0 m x=25 m x=50 m x=100 m
Groupe 1 (A21,A1,A5,A6)
Voie principale uniquementAvec trafic en sens inverse
0
0.5
1
1.5
2
2.5
3
Eca
rt m
oyen
en
excl
uant
la p
ério
de d
e ca
lme
[dB
(A)]
x=0 m x=25 m x=50 m x=100 m
Groupe 2 (A12,A8,A9,A13)
Voie principale uniquementAvec trafic en sens inverse
Figure VIII.17: Ecart moyen entre les résultats de simulation et les niveaux de bruit mesurés pour les deux groupes de scénarios
L’analyse de la Figure VIII.17 montre que l’écart moyen entre les résultats desimulation et les mesures est de 1,5 dB(A). Cette valeur est faible d’autant plus qu’elle estrattachée à des niveaux de bruit calculés avec une période d’agrégation d’une seconde. Lessorties acoustiques du modèle sont donc de bonne qualité par rapport aux résultatsexpérimentaux. La Figure VIII.17 confirme également que la demande sur la voie opposéeest surestimée pour le groupe de scénarios n°1 car la prise en compte de cette contributionengendre des écarts plus importants. Pour le groupe n°2, elle permet au contraire d’affinerles niveaux de bruit estimés par le modèle en x=25 et en x=50 m.
VIII.6 Conclusion et suites du programme de validation expérimentale
L’expérimentation dont les résultats sont décrits dans ce chapitre permet deconclure d’une part au bon fonctionnement du modèle de trafic à accélération bornée en cequi concerne sa faculté à représenter la cinématique d’un flux de véhicules en aval d’un feutricolore. D’autre part, elle montre que l’évolution des niveaux de pression acoustique enbordure de voie au passage d’un peloton de véhicules en phase d’accélération semblecorrectement reproduite par le modèle d’estimation dynamique du bruit à l’exception dupic sonore au droit du feu qui est légèrement surestimé.
La qualité des profils cinématiques obtenus grâce au modèle de trafic à accélérationbornée peut être affirmée avec un degré de confiance élevé car les écarts entre vitesse des

Chapitre VIII : Validation expérimentale
249
véhicules simulée et vitesse réelle estimée sont, pour l’ensemble des scénarios, de l’ordrede la précision avec laquelle ces deux vitesses sont déterminées. De plus, le comportementcinématique du flux n’est pas perturbé par des phénomènes extérieurs au tronçon de voieconsidéré ce qui facilite la comparaison des résultats de simulation avec les données terrainet permet de conclure malgré le nombre relativement faible de scénarios enquêtés (21).
La qualité des sorties acoustiques du modèle d’estimation dynamique du bruit estplus difficile à évaluer à cause d’un certain nombre de biais expérimentaux dont les deuxprincipaux sont :
- la position des sonomètres au bord de la voie qui invalide l’hypothèse d’une lignesource d’émission pour représenter le trafic dans le modèle et qui rend les niveaux debruit mesurés sensibles à la position individuelle des véhicules ;
- l’influence du trafic circulant en sens inverse dont le comportement est très malconnu ;
- la non prise en compte pour l’instant dans le modèle des phénomènes depropagation autre que l’atténuation géométrique.
Le nombre de scénarios enquêtés est trop faible pour pouvoir éliminercomplètement l’influence de la position des véhicules sur le réseau en travaillant sur lecomportement acoustique d’une circulation moyenne soumise à des conditions de traficidentiques. Une solution pour éliminer ce problème serait d’éloigner les sonomètres de lavoie pour rendre valide l’approximation de type ligne source mais cette éventualité n’étaitpas envisageable au vu de la configuration du site d’étude. De plus, elle nécessiteraitd’introduire dans le modèle acoustique un module calculant la propagation du bruit demanière plus précise que la simple atténuation géométrique.
Les résultats de la validation acoustique du modèle d’estimation dynamique dubruit doivent donc être lus comme une première étape montrant la vraisemblance desniveaux sonores calculés par celui-ci. Cette étape doit être poursuivie par une campagne devalidation sur un nombre de redémarrages beaucoup plus important, sur différents sites eten tenant compte du comportement du trafic sur la voie opposée.
Le protocole de l’expérimentation présenté dans ce chapitre est lourd à cause desmesures de trajectoires des véhicules. La validation de la cinématique des véhicules étantactée, la nouvelle campagne de mesures pourra se concentrer uniquement sur la validationacoustique du modèle et donc être relativement légère. Elle peut être réalisé avec unensemble de sonomètres placés en bordure de voie et un compteur de débit placé en amontde la zone pour chaque sens de circulation. Il faut cependant veiller à disposer de donnéesdébit/taux d’occupation pour calibrer le diagramme fondamental représentatif de la zoneétudiée.
La validation expérimentale du modèle d’estimation dynamique du bruit a aussi étél’occasion de recenser les points pour lesquels des études comprenant des relevésexpérimentaux complémentaires sont nécessaires pour améliorer le fonctionnement dumodèle :

Estimation dynamique du bruit émis par le trafic
250
- La détermination de l’accélération maximale moyenne du premier véhiculeredémarrant à un feu ainsi que la dispersion de cette donnée. Cette information estprimordiale pour pouvoir utiliser le modèle sans calibrer pour chaque scénariol’accélération du premier véhicule. L’étude de la dispersion de l’accélérationmaximale moyenne permettra d’évaluer l’erreur commise par le modèle en utilisantune unique valeur pour caractériser les différents types de comportement pouvantêtre observés pour le premier véhicule ;
- Le calibrage du modèle de rapport de boîte en particulier pour les 3 premiersrapports18 en accélération et à vitesse stabilisée. Le modèle de rapport de boîteprésenté au chapitre VII n’a pas été ajusté sur un ensemble de données suffisant pourêtre réellement représentatif du parc automobile. Une partie de l’écart observé entrela simulation et les mesures au niveau du pic de bruit au droit du feu peut d’ailleurss’expliquer par un mauvais calage de la frontière entre le 1er et le 2nd rapport de boîteen accélération ;
- L’étude des lois d’émission de bruit à faible vitesse en phase d’accélération. Leslois intégrées dans le modèle utilisent des classes d’accélération de 0,5 m.s-2
d’amplitude (cf II.3.4). Une telle amplitude peut engendrer des effets de seuil entreles classes et semble trop importante pour estimer précisément les niveaux de bruitémis par les véhicules au début de leur redémarrage (droit du feu).
L’ensemble de ces études ainsi que la campagne de mesures acoustiques aux abordsde feux tricolores constituent une suite logique du programme expérimental déjà mis enœuvre pour valider le modèle d’estimation dynamique du bruit. Ce programme devra êtremené à bien pour pouvoir envisager à terme une utilisation plus opérationnelle de cemodèle.
18 La sensibilité du modèle d’estimation dynamique du bruit aux 4ème et 5ème rapport de boîte est très faible(cf. VII.1.2.b). En effet, ces rapports de boîte sont associés à des vitesses pour lesquelles le bruit de contactpneu/chaussée prédomine et où le bruit moteur est négligeable.