
Bilan du groupe sur l’activité ballon, sonde : Maîtrise d’Excel : excellente 5/ 5
11
Bilan du groupe sur l’activité ballon, sonde : Maîtrise d’Excel : excellente 5/ 5 Compte rendu : bien quand elle a été possible 4/ 5 argumentation satisfaisante complet pas toujours envoyé et pour cause ! Exploitation des données : 4,5 / 5 Courbe bien tracées Analyse satisfaisante mais un poil incomplète Activité en classe : très satisfaisante 5 / 5 Avant correction finale et envoi de prédiction trajectoire 18,5 /20
description
Avant correction finale et envoi de prédiction trajectoire 18,5 /20. Bilan du groupe sur l’activité ballon, sonde : Maîtrise d’Excel : excellente 5/ 5 Compte rendu : bien quand elle a été possible 4/ 5 - PowerPoint PPT Presentation
Transcript of Bilan du groupe sur l’activité ballon, sonde : Maîtrise d’Excel : excellente 5/ 5

Bilan du groupe sur l’activité ballon, sonde :
Maîtrise d’Excel : excellente 5/ 5
Compte rendu : bien quand elle a été possible 4/ 5 argumentation satisfaisante complet pas toujours envoyé et pour cause !
Exploitation des données : 4,5 / 5 Courbe bien tracées Analyse satisfaisante mais un poil incomplète
Activité en classe : très satisfaisante 5 / 5 malgré tous les problèmes rencontrés !
Avant correction finale et envoi de prédiction trajectoire 18,5 /20

Capteur de vitesse ascensionnelle (n°3)
1.Différents types de capteurs permettant de mesurer une vitessea. Effet Hallb. Dynamomètrec. Baromètred. Anémomètre
2.Utilisation d’une photorésistancea. Domaine de validitéb. Etalonnage
3.Utilisation d’un phototransistora. Domaine de validitéb. Etalonnage en fréquencec. Conversion de la fréquence en tensiond. Etalonnage final (en tension)
4. Fiche récapitulative de notre capteur5. Résultats6. Données et interprétations
Voir aussi le fichier Excel éponyme.
Données prévues concernant le ballon : Altitude : 30 kmVitesse de montée : 5 m/sVitesse de descente : 25 m/s (valeur maximale, sans parachute)
Sommaire :
DURIVAUX ThibaudBROFIGA Roméo2°14 – MPI 09/10
La feuille du fichier Excel a été corrigé
Compte rendu : une bonne analyse mais incomplète, a finir

1. Capteur à effet HallLe principe de l’effet hall consiste à « compter » le nombre de passages d’un objet métallique devant un capteur électronique (par exemple, les rayons d’une bicyclette). Ensuite, on détermine une vitesse en ayant le nombre d’objets passés en un temps donné (vitesse en fonction de la fréquence).On n’utilisera pas ce principe car il est plus difficile à réaliser que celui que nous avons choisi.
2. DynamomètreUn dynamomètre mesure un poids (or celui ci varie en fonction de l’altitude) : P = m * g (g variant en fonction de l’altitude).On pourrait ainsi déterminer un coefficient de diminution de cette valeur, et, par conséquent, une vitesse ascensionnelle. Cependant, le ballon n’est pas capable d’atteindre une altitude supérieure à 30 km, or le poids, sur une telle distance, ne variera que de moins de 1%.
3. Baromètre
4. AnémomètreOn intercale l’hélice d’un anémomètre entre une DEL haute luminosité et un capteur permettant de mesurer unefréquence. On mesurera donc la fréquence de passage d’une pale, ce qui nous permettra d’établir une courbed’étalonnage (vitesse en fonction de la fréquence). Dans un premier temps, on va utiliser une photorésistance pourmesurer cette fréquence.
Différentes manières de déterminer une vitesse
)(2 st pp
v
dpv
2
v vitessept pression totaleps pression statique
pd pression dynamique
masse volumique de l'air
Sommaire
Cependant, le capteur de pression dynamique est difficile à mettre en œuvre car les tubes le composant devraient toujours être parfaitement perpendiculaires à l’écoulement du fluide (de l’air). Cela n’est pas réalisable sur notre nacelle car elle tournera constamment et sera sujette à des turbulences.Nous n’utiliserons donc pas ce principe.
Ce n’est pas ça la raison mais le fait que la différence de pression attendue n’était mesurable à partir des 2 capteurs de pression
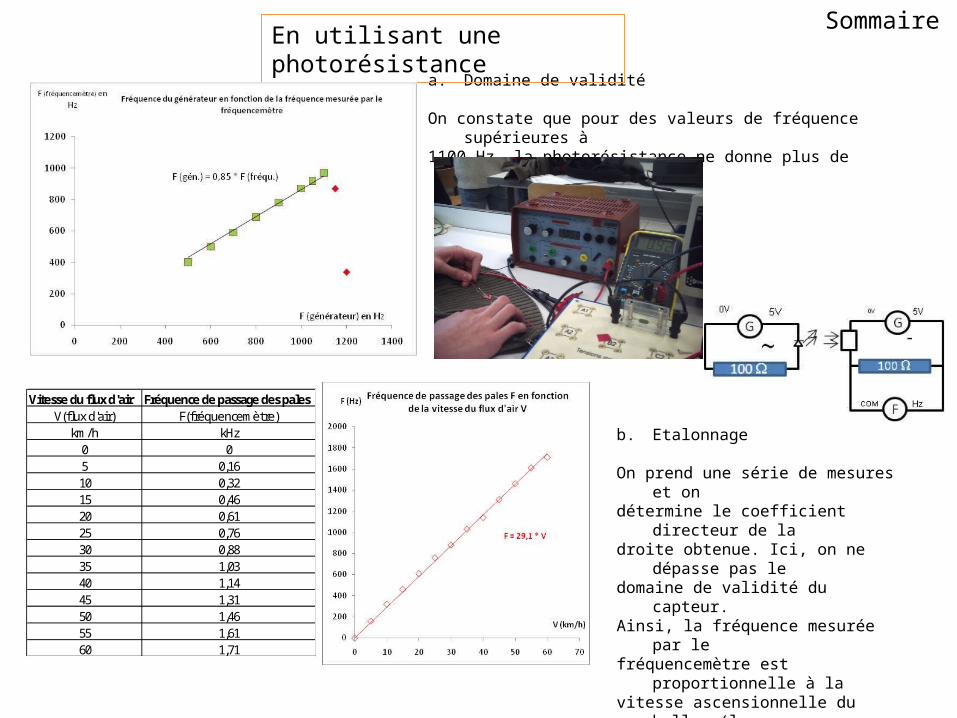
a. Domaine de validité
On constate que pour des valeurs de fréquence supérieures à1100 Hz, la photorésistance ne donne plus de valeurs cohérentes.
Vitesse du flux d'air Fréquence de passage des palesV(flux d'air) F(fréquencemètre)
km/h kHz0 05 0,1610 0,3215 0,4620 0,6125 0,7630 0,8835 1,0340 1,1445 1,3150 1,4655 1,6160 1,71
b. Etalonnage
On prend une série de mesures et ondétermine le coefficient directeur de ladroite obtenue. Ici, on ne dépasse pas ledomaine de validité du capteur.Ainsi, la fréquence mesurée par lefréquencemètre est proportionnelle à lavitesse ascensionnelle du ballon (lue surl’écran de l’anémomètre).
En utilisant une photorésistanceSommaire

a. Domaine de validité
On constate que pour des valeurs de vitesses supérieures à75 km/h, le phototransistor ne donne plus de valeurs de fréquencescohérentes.
b. Etalonnage
On prend une série de mesures etOn détermine le coefficient directeur de ladroite obtenue. Ces valeurs peuvent être considéréescomme justes car on ne sort pas dudomaine de validité du capteur, en effet,on peut considérer que le ballon n’ira pasà des vitesses dépassant 25 m/s.
En utilisant un phototransistor
Ainsi, la fréquence mesurée par le fréquencemètre est proportionnelle
à la vitesse du flux de l’air passant dans l’anémomètre.
Sommaire
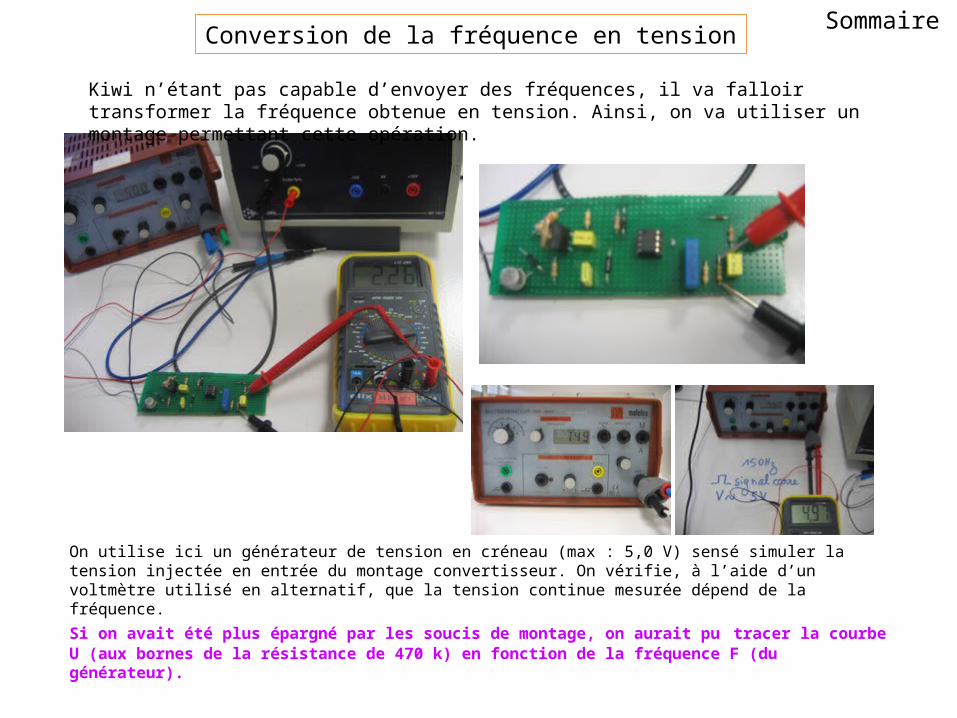
On utilise ici un générateur de tension en créneau (max : 5,0 V) sensé simuler la tension injectée en entrée du montage convertisseur. On vérifie, à l’aide d’un voltmètre utilisé en alternatif, que la tension continue mesurée dépend de la fréquence.
Si on avait été plus épargné par les soucis de montage, on aurait pu tracer la courbe U (aux bornes de la résistance de 470 k) en fonction de la fréquence F (du générateur).
Kiwi n’étant pas capable d’envoyer des fréquences, il va falloir transformer la fréquence obtenue en tension. Ainsi, on va utiliser un montage permettant cette opération.
Conversion de la fréquence en tensionSommaire

47 k
470
k
47 k
33
33
5V
0V
Générateur kiwi
C3 = 1 µ
C4
= 1
µ
C2
= 1
0 n
IRF 1405
1 1 : Gate: Gate
2 2 : Drain: Drain
3 3 : Source: Source
Queue : émetteur
Collecteur
base
Fil gris signal entrée anémomètre(simulation par signal tension carrée entre 0 et 5 V)
2N 2219A*
NE 555 Prepère
11
33
55
4,7
k
88
C1
= 1
00 n
Fil noir
Fil violet dessous
22
Fil rouge 1
Fil marron dessus
Fil rouge dessusFil rouge 4
162
4,7
k
1N4148
* Ou transistor 2N222 * Valeur préconisé C1 = 100 nF
Connexion dans montage convertisseur Fréquence/Tension continue (0/5V):Remarque : pas de résistance R2 ni R3
R10 = 66
162
0.16
k
Fil ro
ug
e
Fil noir
162
4,7
k Réq
= 1
60
Mesure de la tension aux bornes de la résistance de 470 k
Sommaire
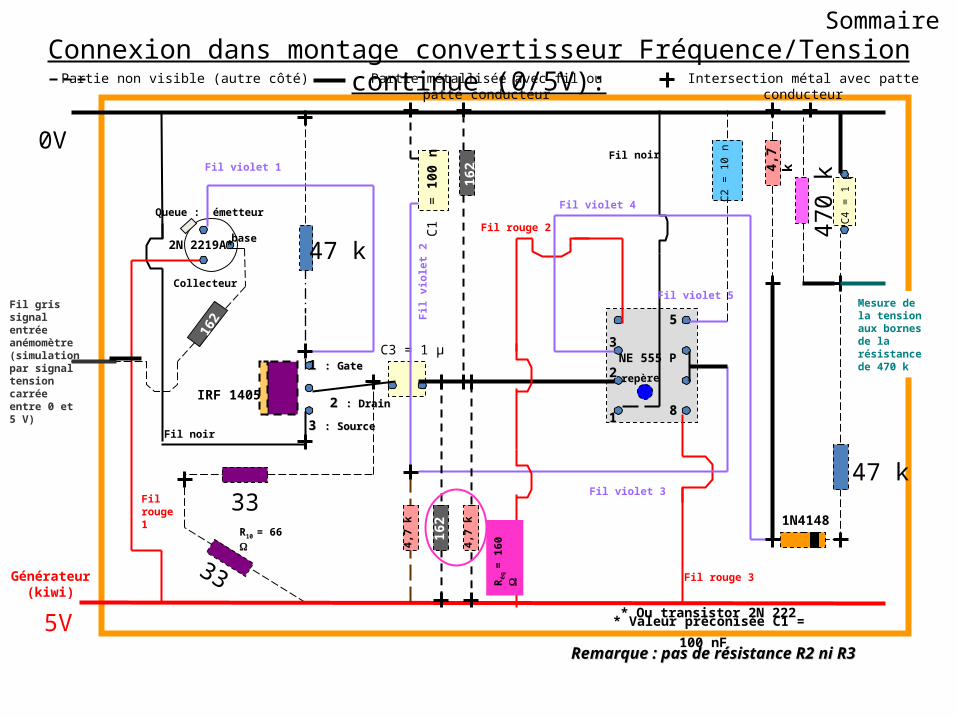
Connexion dans montage convertisseur Fréquence/Tension continue (0/5V):
Remarque : pas de résistance R2 ni R3Remarque : pas de résistance R2 ni R3
47 k
470
k
47 k
33
33
5V
0V
Générateur (kiwi)
C3 = 1 µ
C4
= 1
µ
C2
= 1
0 n
IRF 1405
1 1 : Gate: Gate
2 2 : Drain: Drain
3 3 : Source: Source
Queue : émetteur
Collecteur
base
Fil gris signal entrée anémomètre(simulation par signal tension carrée entre 0 et 5 V)
2N 2219A*
NE 555 P
repère
11
33
55
4,7
k
88
C1
= 1
00 n
Fil noir
Fil violet 3
22
Fil violet 1
Fil rouge 1
Fil rouge 3
162
4,7
k 1N4148
* Ou transistor 2N 222* Valeur préconisée C1 = 100 nF
R10 = 66 162
Fil rouge 2
Fil noir
162
4,7
k
Réq
= 1
60
Fil
vio
let
2
Fil violet 4
Fil violet 5
Partie métallisée avec fil ou patte conducteur Intersection métal avec patte conducteurPartie non visible (autre côté)
Mesure de la tension aux bornes de la résistance de 470 k
Sommaire
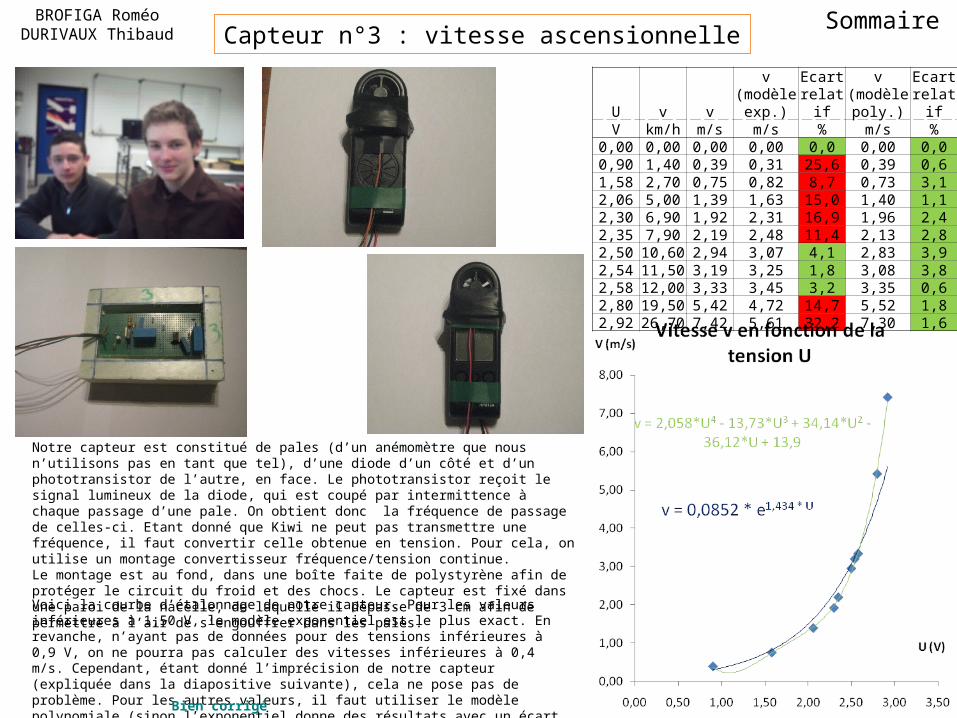
Capteur n°3 : vitesse ascensionnelleBROFIGA Roméo
DURIVAUX Thibaud
Notre capteur est constitué de pales (d’un anémomètre que nous n’utilisons pas en tant que tel), d’une diode d’un côté et d’un phototransistor de l’autre, en face. Le phototransistor reçoit le signal lumineux de la diode, qui est coupé par intermittence à chaque passage d’une pale. On obtient donc la fréquence de passage de celles-ci. Etant donné que Kiwi ne peut pas transmettre une fréquence, il faut convertir celle obtenue en tension. Pour cela, on utilise un montage convertisseur fréquence/tension continue.Le montage est au fond, dans une boîte faite de polystyrène afin de protéger le circuit du froid et des chocs. Le capteur est fixé dans une paroi de la nacelle, de laquelle il dépasse de 3 cm afin de permettre à l’air de s’engouffrer dans les pales.
U v vv (modèle
exp.)Ecart relatif
v (modèle poly.)
Ecart relatif
V km/h m/s m/s % m/s %0,00 0,00 0,00 0,00 0,0 0,00 0,00,90 1,40 0,39 0,31 25,6 0,39 0,61,58 2,70 0,75 0,82 8,7 0,73 3,12,06 5,00 1,39 1,63 15,0 1,40 1,12,30 6,90 1,92 2,31 16,9 1,96 2,42,35 7,90 2,19 2,48 11,4 2,13 2,82,50 10,60 2,94 3,07 4,1 2,83 3,92,54 11,50 3,19 3,25 1,8 3,08 3,82,58 12,00 3,33 3,45 3,2 3,35 0,62,80 19,50 5,42 4,72 14,7 5,52 1,82,92 26,70 7,42 5,61 32,2 7,30 1,6
Sommaire
Voici la courbe d’étalonnage de notre capteur. Pour les valeurs inférieures à 1,50 V, le modèle exponentiel est le plus exact. En revanche, n’ayant pas de données pour des tensions inférieures à 0,9 V, on ne pourra pas calculer des vitesses inférieures à 0,4 m/s. Cependant, étant donné l’imprécision de notre capteur (expliquée dans la diapositive suivante), cela ne pose pas de problème. Pour les autres valeurs, il faut utiliser le modèle polynomiale (sinon l’exponentiel donne des résultats avec un écart relatif d’environ 15% !).
Bien corrigé

Résultats
Notre courbe est la verte foncée. « temp » est la température extérieure et « temp 2 » et celle intérieure. « lux » et « lux 2 » sont des capteurs de luminosité et « lux 3 » est le capteur dirigé vers le sol. Il ne faut pas se fier à l’indication de durée sur cette page.
Sommaire
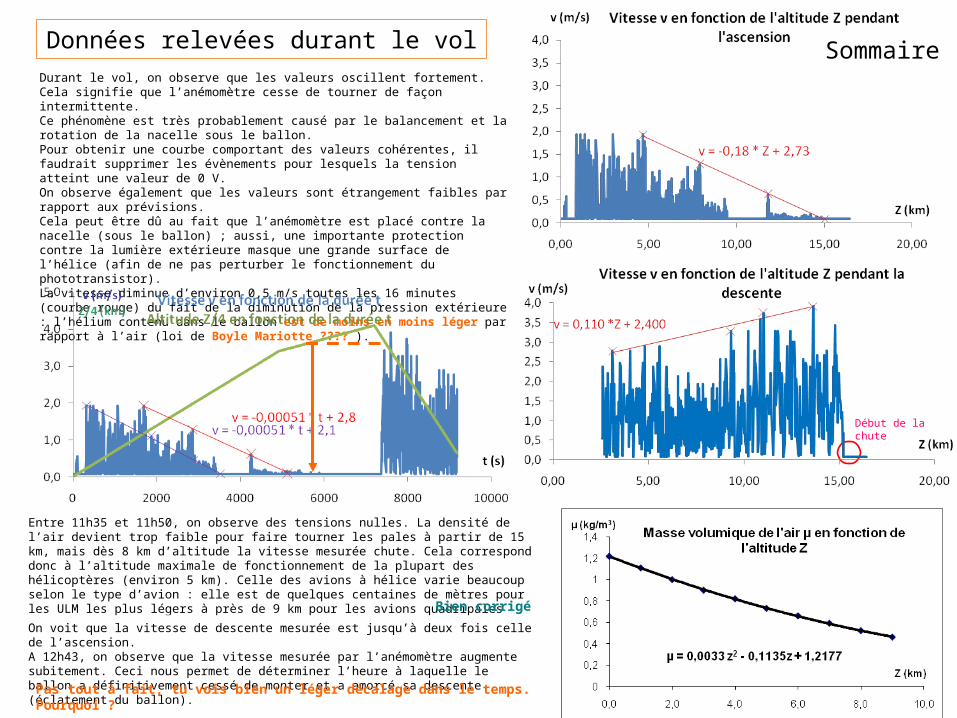
Données relevées durant le vol
Entre 11h35 et 11h50, on observe des tensions nulles. La densité de l’air devient trop faible pour faire tourner les pales à partir de 15 km, mais dès 8 km d’altitude la vitesse mesurée chute. Cela correspond donc à l’altitude maximale de fonctionnement de la plupart des hélicoptères (environ 5 km). Celle des avions à hélice varie beaucoup selon le type d’avion : elle est de quelques centaines de mètres pour les ULM les plus légers à près de 9 km pour les avions quadripales lourds, en passant par 5 km pour les avions légers de tourisme.La masse volumique minimale de l’air nécessaire est donc de 0,75 kg/m3.
Durant le vol, on observe que les valeurs oscillent fortement. Cela signifie que l’anémomètre cesse de tourner de façon intermittente. Ce phénomène est très probablement causé par le balancement et la rotation de la nacelle sous le ballon.Pour obtenir une courbe comportant des valeurs cohérentes, il faudrait supprimer les évènements pour lesquels la tension atteint une valeur de 0 V.On observe également que les valeurs sont étrangement faibles par rapport aux prévisions. Cela peut être dû au fait que l’anémomètre est placé contre la nacelle (sous le ballon) ; aussi, une importante protection contre la lumière extérieure masque une grande surface de l’hélice (afin de ne pas perturber le fonctionnement du phototransistor).La vitesse diminue d’environ 0,5 m/s toutes les 16 minutes (courbe rouge) du fait de la diminution de la pression extérieure : l’hélium contenu dans le ballon est de moins en moins léger par rapport à l’air (loi de Boyle Mariotte ???? ).
On voit que la vitesse de descente mesurée est jusqu’à deux fois celle de l’ascension.A 12h43, on observe que la vitesse mesurée par l’anémomètre augmente subitement. Ceci nous permet de déterminer l’heure à laquelle le ballon a définitivement cessé de monter et a amorcé sa descente (éclatement du ballon).
Début de la chute
Sommaire
Bien corrigé
Pas tout à fait, tu vois bien un léger décalage dans le temps. Pourquoi ?


















