Apports de GOCE pour la modélisation régionale du champ de ... · Apport des gradients...
32
A pports de GOCE pour la modélisation régionale du champ de pesanteur I. Panet (1) , G. Métivier (1) , O. Jamet (1) , L. Métivier (1) , D. Coulot (1) , O. de Viron (2) , F. Deleflie (3) 1 – Institut Géographique National 2 - Institut de Physique du Globe de Paris, Sorbonne Paris-Cité, Université Paris- Diderot, UMR CNRS 7154 3 – Institut de Mécanique Céleste et de Calcul des Ephémérides (Notre expérience sur les gradients GOCE) Avec de nombreux éléments du Handbook GOCE de l’ESA
Transcript of Apports de GOCE pour la modélisation régionale du champ de ... · Apport des gradients...

Apports de GOCE pour la modélisation
régionale du champ de pesanteur
I. Panet(1), G. Métivier(1), O. Jamet(1), L. Métivier(1),
D. Coulot(1), O. de Viron(2), F. Deleflie(3)
1 – Institut Géographique National
2 - Institut de Physique du Globe de Paris, Sorbonne Paris-Cité, Université Paris-Diderot, UMR CNRS 7154
3 – Institut de Mécanique Céleste et de Calcul des Ephémérides
(Notre expérience sur les gradients GOCE)
Avec de nombreux éléments du Handbook GOCE de l’ESA

Motivations
GOCE: des gradients et des modèles de champ
de haute précision à 100 km de résolution
Géoïde global et local
Structure terrestre
Partage de notre expérience utilisateur :
Gradients ou modèle de champ ?
Les deux types de gradients de niveau 2 et
leur manipulation pratique
Premières modélisations régionales
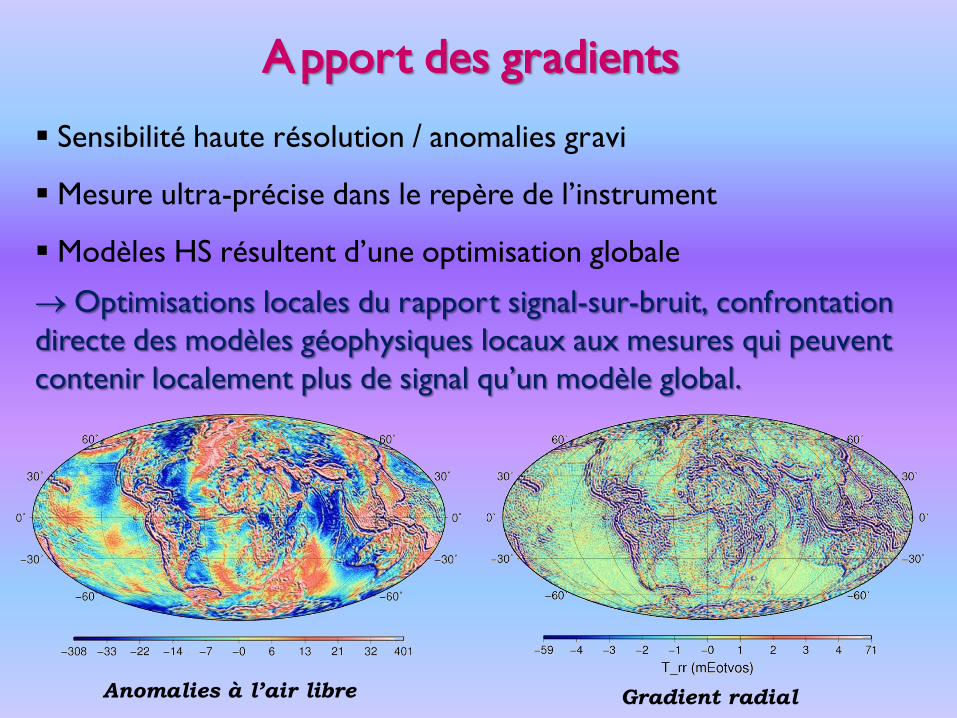
Apport des gradients
Sensibilité haute résolution / anomalies gravi
Mesure ultra-précise dans le repère de l’instrument
Modèles HS résultent d’une optimisation globale
Optimisations locales du rapport signal-sur-bruit, confrontation
directe des modèles géophysiques locaux aux mesures qui peuvent
contenir localement plus de signal qu’un modèle global.
Gradient radial Anomalies à l’air libre

La mission GOCE
Satellite à basse altitude (~255 km)
Contre-carrer l’atténuation avec
l’altitude.
Sensibilité aux petites structures
Amplification par différentiation:
gradiométrie.
Champ haute résolution.
Compensation des forces non-
gravitationnelles
Orbite à qq cm : récepteurs GPS & rétro-réflecteur laser

Gradiométrie
Mesure des dérivées secondes du potentiel de pesanteur
Trois paires d’accéléromètres distants de 50 cm, forment les
trois bras orthogonaux du gradiomètre.
Mesure accélérométrique basée sur
une mesure de l’intensité du champ
électrique maintenant une masse
d’épreuve (320 g) en lévitation.
Outre l’attraction gravitationnelle, cette mesure est sensible à
l’accélération d’entraînement du repère lié au satellite, en
rotation par rapport à un repère fixe, et aux forces non-
gravitationnelles (qu’on suppose compensées).
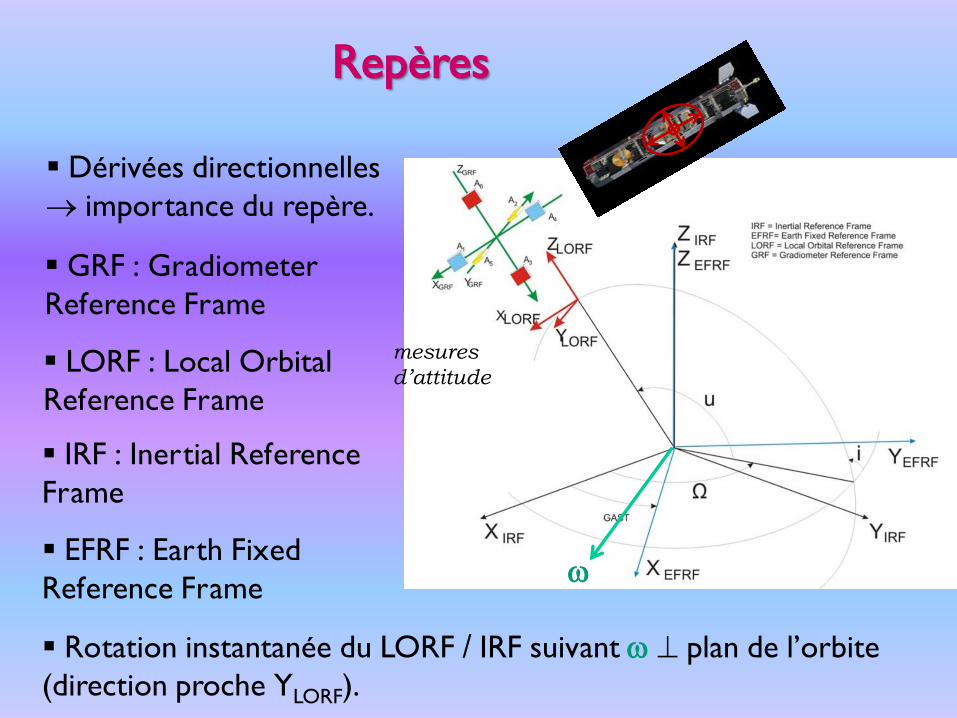
Repères
GRF : Gradiometer
Reference Frame
LORF : Local Orbital
Reference Frame
IRF : Inertial Reference
Frame
EFRF : Earth Fixed
Reference Frame
Rotation instantanée du LORF / IRF suivant plan de l’orbite
(direction proche YLORF).
mesures
d’attitude
Dérivées directionnelles
importance du repère.

Mesure de l’accéléromètre i
),( faa gravité
i
mesuré
i
Tenseur des gradients mesurés D :
acc. entrainement
j
iji
x
aD
,
acc. sur la direction i
coordonnée j
Estimation des rotations puis des gradients de gravité :
tDD 2
1
tDDfT 2
1)( T
+ mesures d’attitude (star trackers)
T : Trace en théorie nulle (harmonicité), tenseur symétrique
Txx, Tyy, Tzz, Txz composantes précises dans le GRF.
Des mesures aux gradients de gravité
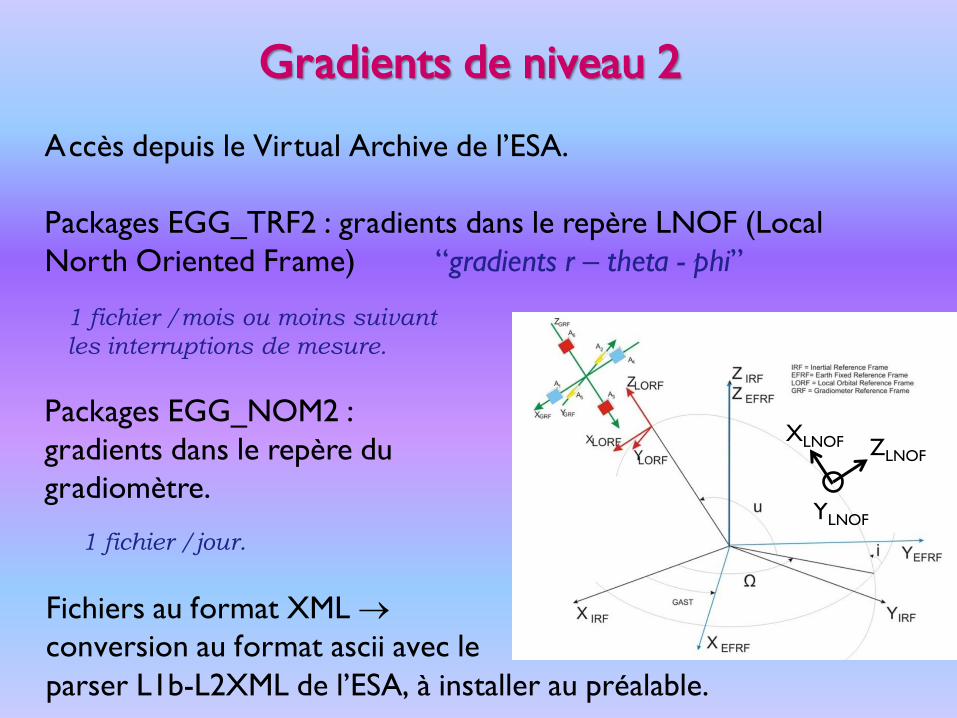
Gradients de niveau 2
Accès depuis le Virtual Archive de l’ESA.
Packages EGG_TRF2 : gradients dans le repère LNOF (Local
North Oriented Frame) “gradients r – theta - phi’’
ZLNOF
XLNOF
YLNOF
Packages EGG_NOM2 :
gradients dans le repère du
gradiomètre.
1 fichier /mois ou moins suivant
les interruptions de mesure.
1 fichier /jour.
Fichiers au format XML
conversion au format ascii avec le
parser L1b-L2XML de l’ESA, à installer au préalable.

Gradients EGG_NOM2
Directions de dérivation changent à chaque instant elles sont
données par les quaternions d’orientation du GRF.
Traces ascendantes : X ~ Nord ; Y ~ Est ; Z ~ radial down
Traces descendantes : X ~ Sud ; Y ~ Ouest ; Z ~ radial down
repère de
l’instrument
Fuchs & Bouman,
GJI, 2011
GRF/LORF-v GRF/LNOF
-0.2°
0.6° 179°
181° -1.5°
2.5° 85°
0°
179°
181°
0°
0.4°
lacet
roulis
tangage

Gradients EGG_NOM2
Rotations entre le repère terrestre et le GRF : combiner les
quaternions d’attitude qui définissent les rotations
- EFRF IRF : packages SST_PRM2 fournis avec les
orbites (SST_PSO2).
- IRF GRF (et non l’inverse !!) : quaternions fournis
dans les fichiers de gradients EGG_NOM2.
Les matrices de rotation se construisent simplement :
2
4
2
3
2
2
2
141324231
4132
2
4
2
3
2
2
2
14321
42314321
2
4
2
3
2
2
2
1
22
22
22
qqqqqqqqqqqq
qqqqqqqqqqqq
qqqqqqqqqqqq
R
A partir des quaternions 3214 kqjqiqqq

Gradients EGG_NOM2
Rotation appliquée au tenseur gradients :
IRFEFRFGRFIRFGRFEFRF RRR
t
IRFEFRFEFRFGRFEFRFGRF RTRT
Avec :
Gradients dans le repère terrestre
(ex: issus d’un modèle)
Gradients mesurés
dans le GRF
Construction de :
Les quaternions correspondants ne sont pas fournis aux instants de
mesures des gradients mais à ceux des orbites (pas les mêmes) !
Interpolation : calcul du quaternion de rotation différentielle entre
les instants des orbites, puis interpolation linéaire de l’angle à l’instant
des gradients.
IRFEFRFR

Gradients EGG_NOM2
Positionnement spatial des gradients :
Les fichiers EGG_NOM2 contiennent les gradients et les instants
de mesure. Il faut leur associer les fichiers d’orbites qui
contiennent les coordonnées géographiques.
SST_PSO2, extraire les fichiers SST_PKI (orbite cinématique)
et SST_PRD (orbite réduite dynamique).
! Décalage de 15” entre le contenu des fichiers d’orbite et celui
des fichiers de gradients
! Les positions des orbites ne sont pas fournies aux instants
des gradients interpolation de Lagrange d’ordre 5 des
orbites PRD (précision de l’interpolation mieux que cm).

Gradients EGG_NOM2
EGG_NOM2 SST_PSO2
1 fichier /jour. 1 fichier /jour.
SST_PRM2 SST_PRD2 GRFT GRFIRFQ
IRFEFRFQ
IRFEFRFQ
Instants orbite
Instants gradients
ZYXZYX ,,,,,
ZYXZYX ,,,,,
IRFEFRFR
GRFIRFR
GRFEFRFR
GRADIENTS
DIRECTIONS DE
DERIVATION
POSITIONS
Gradients EGG_NOM2
Qu’est-ce qu’ils contiennent ?
Gradients du champ total (champ normal + champ perturbateur),
calibrés et validés à l’aide de gradients prédits par des modèles
globaux. Gaps de données comblés.
Une correction de variation temporelle a été appliquée pour :
Marées (modèles)
Variations temporelles hors marées :
Modèle atmosphérique ECMWF
Pression océanique fond de mer OMCT
Cycle annuel de GRACE
Ces corrections temporelles sont également fournies dans les
fichiers EGG_NOM2.
Développement SH
SST_AUX2

Gradients EGG_NOM2
XX
YY
ZZ
XZ
Traces ascendantes
UNITE : 1 Eotvos = 10-9 s-2
Période : 1-24 /11 / 2009
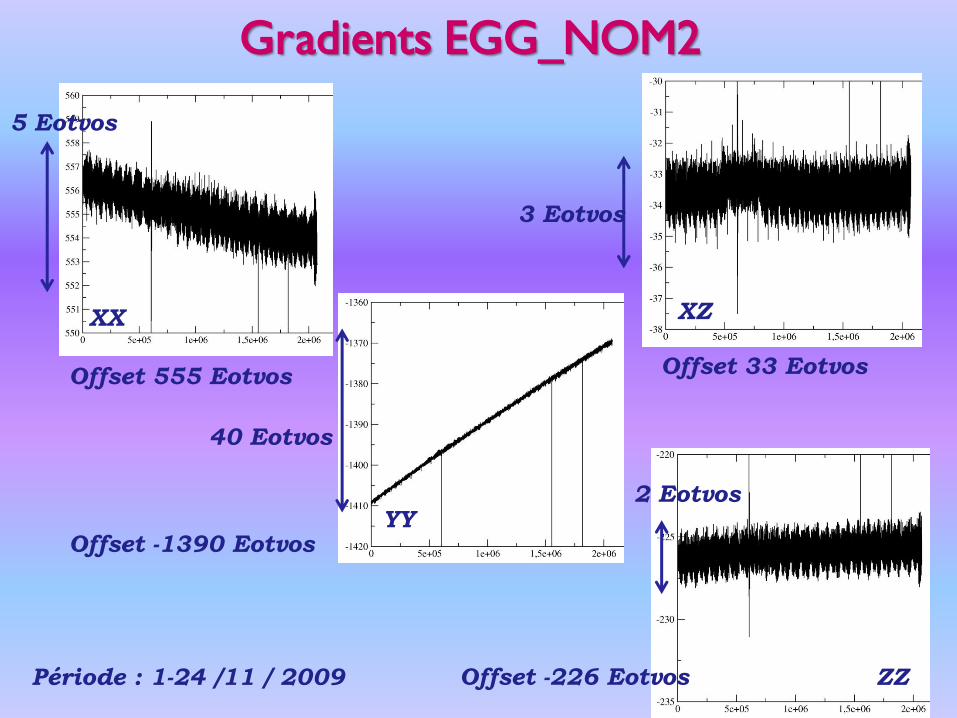
Gradients EGG_NOM2
Offset 555 Eotvos
5 Eotvos
Période : 1-24 /11 / 2009
3 Eotvos
Offset 33 Eotvos
XX
YY
ZZ
XZ
Offset -1390 Eotvos
40 Eotvos
Offset -226 Eotvos ZZ
2 Eotvos

Le terme -GM/r Nord/Nord
Ouest /Ouest
r /r
Nord/r
Trace nulle
Repère LNOF
1350 Eotvos
1350 Eotvos
-2750 Eotvos
10-5 Eotvos
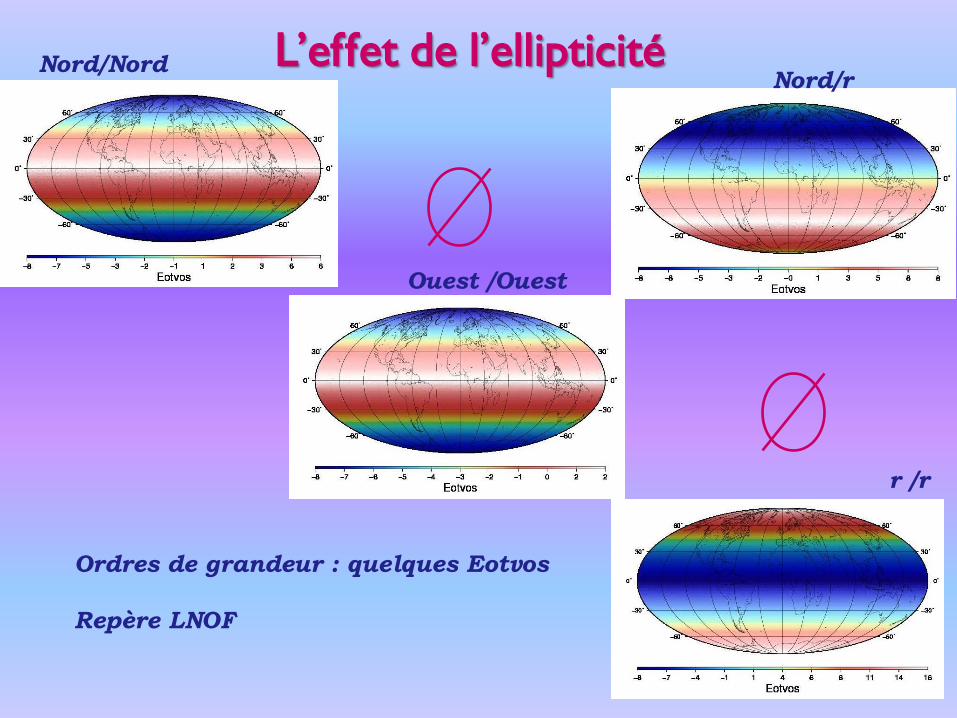
L’effet de l’ellipticité Nord/Nord
Ouest /Ouest
r /r
Nord/r
Repère LNOF
Ordres de grandeur : quelques Eotvos

Repère LNOF
Nord/Nord
Ouest /Ouest
r /r
Nord/r
Le champ normal total dans le LNOF
1350 Eotvos
1350 Eotvos
-2750 Eotvos
6 Eotvos

Le champ normal total dans le GRF
XX
YY
ZZ
XZ
Traces ascendantes
1350 Eotvos
1350 Eotvos
-2750 Eotvos
-20 Eotvos
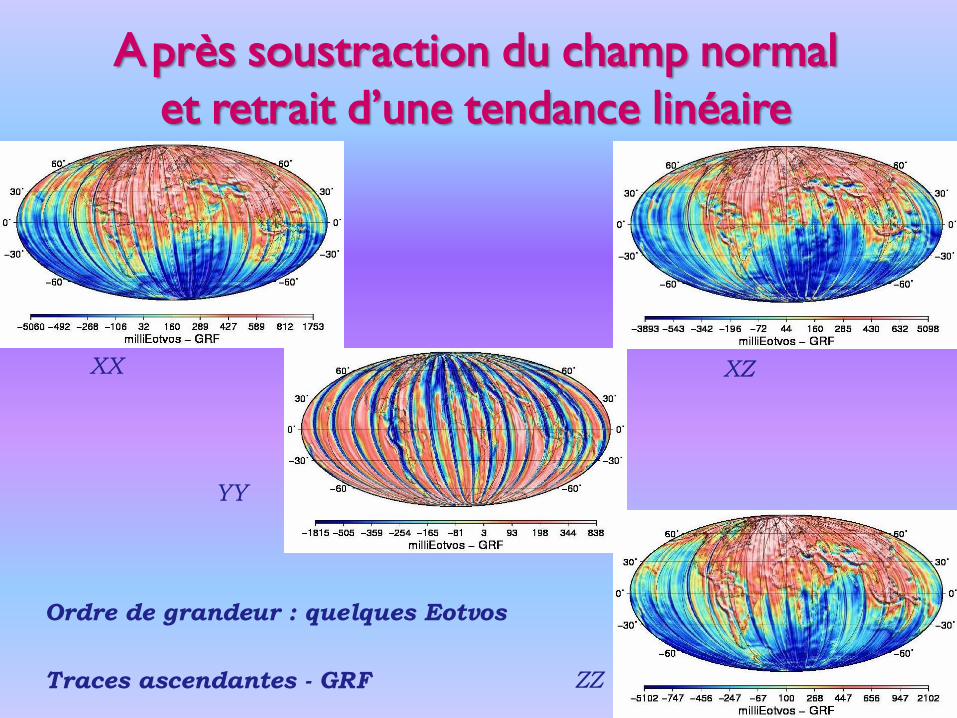
Après soustraction du champ normal
et retrait d’une tendance linéaire
XX
YY
ZZ
XZ
Traces ascendantes - GRF
Ordre de grandeur : quelques Eotvos

Spectre
Fréquence orbitale
Bruit
instrumental
Signal
gravimétrique
Perturbations
à la fréquence
orbitale et ses
multiples
Bande passante (1500 - 80 km)

Spectre
Fréquence orbitale
Bruit
instrumental
Signal
gravimétrique
Perturbations
à la fréquence
orbitale et ses
multiples
Bande passante (1500 - 80 km)

Fréquence orbitale
Bruit
instrumental
Signal
gravimétrique
Perturbations
à la fréquence
orbitale et ses
multiples
Bande passante (1500 - 80 km)
Spectre

Fréquence orbitale
Bruit
instrumental
Signal
gravimétrique
Perturbations
à la fréquence
orbitale et ses
multiples
Bande passante (1500 - 80 km)
Spectre

Fréquence orbitale
Bruit
instrumental
Perturbations
à la fréquence
orbitale et ses
multiples
Bande passante (1500 - 80 km)
Spectre
Les gradients EGG_TRF2
Rotation dans le LNOF combinaison linéaire des 6 composantes
dans le GRF y compris Txy et Tyz peu précis
Perte de précision !!!
1 - Filtrage des gradients GRF (Txx, Tyy, Tzz, Txz) dans la bande passante
2 - Basses fréquences : gradients d’un modèle HS (statique)
3 - Txy et Tyz : gradients d’un modèle HS (statique)
4 – Rotation GRF LNOF
On obtient donc un produit mixte (champ statique à basse fréquence,
champ total, statique et temporel, dans la bande passante).

Les gradients EGG_TRF2
XX
YY
ZZ
XY XZ
YZ
Repère LNOF

Modélisation régionale
Décomposition du potentiel de pesanteur comme une combinaison
linéaire d’ondelettes.
Fonctions harmoniques 3D
Bonne localisation spatio-spectrale
Interprétation multipolaire
(sources équivalentes)
Earth mean sphere
Large scale
wavelet
Small scale
wavelet
Multipolar
sources
e1 e2
Sélection d’ondelettes à différentes
échelles et positions frame
Estimation du modèle : ajustement
des mesures par moindres carrés.

Gradients des ondelettes
Repère GRF
Traces ascendantes Repère LNOF

Modélisation sur l’Europe
XX YY
ZZ
XZ
Repère LNOF – gradients EGG_TRF2
1 an de mesures (fin 2009-fin 2010)
Echelles 625 à 150 km
Fit des données à ~ 20 milliEotvos

Conclusions
Mise en place d’une chaîne de traitement des packages de
données de gradient.
Premières approches en ondelettes dans le LNOF.
Prochaines étapes :
- Modélisation dans le GRF
- Combinaison avec la gravimétrie de surface
( Validation et densification locale).
A suivre…