ANALYSE, TRAITEMENT, CODAGE, PROTECTION, … · Pour la protection des objets 3D, le problème de...
4
Informatique/Robotique www.lirmm.fr ICAR Image & Interaction Effectifs au 30/06/2013 : 7 permanents (4,3 ETP) 17 doctorants (16,4 ETP) Nombre de thèses soutenues entre le 01/01/2008 et le 30/06/2013 : 16 Responsables : William Puech Page Internet de l’équipe : http://www.lirmm.fr/image ANALYSE, TRAITEMENT, CODAGE, PROTECTION, MODÉLISATION, VISUALISATION, IMAGE, VIDÉO, OBJET 3D Présentation L’équipe ICAR (Image & Interaction) développe des activités de recherche associant l’interaction et le traitement des données visuelles telles que les images, les vidéos et les objets 3D. L’équipe ICAR est structurée suivant 3 axes : Analyse & Traitement (AT), Codage & Protection (CP) et Modélisation & Visualisation (MV). L’axe AT s’intéresse à de nouvelles techniques de traitement bas-niveau de l’information représentant, dans un même cadre théorique, l’imprécis, l’incertain et l’incomplet (types d’erreur en traitement des données). L’axe CP s’intéresse à la transmission et l’archivage sécurisés de données visuelles. Cette protection peut être assurée par tatouage, stéganographie, ou chiffrement et peut nécessiter la robustesse à la compression. L’objectif de l’axe MV est de modéliser des grands ensembles de données complexes (en dimension et en nature) afin de permettre une visualisation intuitive ou de manipuler ces données pour en extraire des connaissances. Organisation et Vie de l’équipe L’équipe ICAR, créée pour regrouper les chercheurs du LIRMM autour de la thématique « image », est rattachée aux 2 départements Informatique et Robotique. Ses membres sont fortement impliqués dans les formations universitaires liées à l’image, mais également dans les différents conseils (CS de l’université, CNU, conseil du laboratoire) ainsi que dans les activités d’animation scientifique (GDR ISIS, comité de pilotage de revues). L’équipe est structurée autour d’un responsable et d’un adjoint. Des responsabilités thématiques telles que les relations avec les entreprises sont distribuées aux permanents. Deux réunions mensuelles rythment la vie de l’équipe. Ces réunions comportent deux temps. Un premier réservé aux permanents (avec présence d’un représentant des doctorants) permet de discuter de la politique scientifique, budgétaire et de formation de l’équipe, ainsi que de l’interaction avec nos différentes instances. Un deuxième, ouvert à tous les membres de l’équipe, permet aux doctorants, stagiaires, de présenter leurs travaux à l’ensemble de la communauté pour les partager ainsi que bénéficier de retours critiques. La description de l’ensemble des réunions est accessible sur : www.lirmm.fr/image. Chaque année, depuis plus de 10 ans, l’équipe ICAR organise au moins 6 séminaires scientifiques faisant intervenir des chercheurs extérieurs. Ces exposés sont regroupés dans un module doctoral : le module image. Enfin, persuadés que la convivialité est un moteur essentiel à l’équipe, des petits-déjeuners sont régulièrement organisés par un permanent et un doctorant. Une fois par an, nous organisons également une journée avec des présentations scientifiques le matin et une activité ludique l’après-midi. Evolution de l’équipe Deux nouveaux membres ont rejoint l’équipe et renforcé l’axe MV durant la période d’évaluation : début 2008, Nancy Rodriguez, dont les thématiques de recherche couvrent la visualisation scientifique, la synthèse d’images, la réalité virtuelle et augmentée ; puis en 2011, Benjamin Gilles, reçu au concours du CNRS, dont les activités portent sur les modèles déformables pour l’analyse d’images médicales et la simulation mécanique (il se partage entre les équipes DEMAR et ICAR). L’équipe ICAR comporte maintenant 7 permanents dont 2 chercheurs CNRS.
Transcript of ANALYSE, TRAITEMENT, CODAGE, PROTECTION, … · Pour la protection des objets 3D, le problème de...

Informatique/Robotiquew
ww
.lir
mm
.fr
ICARImage &
Interaction
Effectifsau 30/06/2013 :
7 permanents (4,3 ETP)17 doctorants (16,4 ETP)
Nombre de thèses soutenues entre le 01/01/2008 et le 30/06/2013 : 16
Responsables :William Puech
Page Internet de l’équipe : http://www.lirmm.fr/image
ANALYSE, TRAITEMENT, CODAGE, PROTECTION, MODÉLISATION, VISUALISATION, IMAGE, VIDÉO, OBJET 3D
Présentation
L’équipe ICAR (Image & Interaction) développe des activités de recherche associant l’interaction et le traitement des données visuelles telles que les images, les vidéos et les objets 3D. L’équipe ICAR est structurée suivant 3 axes : Analyse & Traitement (AT), Codage & Protection (CP) et Modélisation & Visualisation (MV).L’axe AT s’intéresse à de nouvelles techniques de traitement bas-niveau de l’information représentant, dans un même cadre théorique, l’imprécis, l’incertain et l’incomplet (types d’erreur en traitement des données). L’axe CP s’intéresse à la transmission et l’archivage sécurisés de données visuelles. Cette protection peut être assurée par tatouage, stéganographie, ou chiffrement et peut nécessiter la robustesse à la compression. L’objectif de l’axe MV est de modéliser des grands ensembles de données complexes (en dimension et en nature) afin de permettre une visualisation intuitive ou de manipuler ces données pour en extraire des connaissances.
Organisation et Vie de l’équipe
L’équipe ICAR, créée pour regrouper les chercheurs du LIRMM autour de la thématique « image », est rattachée aux 2 départements Informatique et Robotique. Ses membres sont fortement impliqués dans les formations universitaires liées à l’image, mais également dans les différents conseils (CS de l’université, CNU, conseil du laboratoire) ainsi que dans les activités d’animation scientifique (GDR ISIS, comité de pilotage de revues). L’équipe est structurée autour d’un responsable et d’un adjoint. Des responsabilités thématiques telles que les relations avec les entreprises sont distribuées aux permanents. Deux réunions mensuelles rythment la vie de l’équipe. Ces réunions comportent deux temps. Un premier réservé aux permanents (avec présence d’un représentant des doctorants) permet de discuter de la politique scientifique, budgétaire et de formation de l’équipe, ainsi que de l’interaction avec nos différentes instances. Un deuxième, ouvert à tous les membres de l’équipe, permet aux doctorants, stagiaires, de présenter leurs travaux à l’ensemble de la communauté pour les partager ainsi que bénéficier de retours critiques. La description de l’ensemble des réunions est accessible sur : www.lirmm.fr/image. Chaque année, depuis plus de 10 ans, l’équipe ICAR organise au moins 6 séminaires scientifiques faisant intervenir des chercheurs extérieurs. Ces exposés sont regroupés dans un module doctoral : le module image.Enfin, persuadés que la convivialité est un moteur essentiel à l’équipe, des petits-déjeuners sont régulièrement organisés par un permanent et un doctorant. Une fois par an, nous organisons également une journée avec des présentations scientifiques le matin et une activité ludique l’après-midi.
Evolution de l’équipe
Deux nouveaux membres ont rejoint l’équipe et renforcé l’axe MV durant la période d’évaluation : début 2008, Nancy Rodriguez, dont les thématiques de recherche couvrent la visualisation scientifique, la synthèse d’images, la réalité virtuelle et augmentée ; puis en 2011, Benjamin Gilles, reçu au concours du CNRS, dont les activités portent sur les modèles déformables pour l’analyse d’images médicales et la simulation mécanique (il se partage entre les équipes DEMAR et ICAR). L’équipe ICAR comporte maintenant 7 permanents dont 2 chercheurs CNRS.

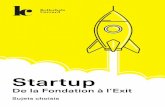
débit d’un fleuve à partir d’une séquence d’images satellitaires. Dans le cadre d’un projet d’agriculture de précision, nous travaillons sur l’utilisation d’images hyperspectrales pour la détection, la localisation et la destruction d’adventis*. Nous sommes également impliqués sur des problématiques de vision sous-marine pour la robotique telles que la détection et le suivi de pipeline ou l’aide à la navigation.
Codage & protectionLe transfert, la visualisation et l’archivage de données visuelles sont des services numériques qui connaissent une forte croissance depuis 10 ans. Le développement de ce type de services soulève un nombre conséquent de problèmes non résolus à ce jour. Un premier problème concerne la compression de ces données visuelles. En fonction des applications la compression pourra être plus ou moins importante, réversible ou non. Un deuxième problème concerne les aspects sécurité, englobant les problèmes de confidentialité, d’intégrité des données, de traçabilité, mais aussi de correction d’erreurs et de robustesse aux attaques bienveillantes ou non. Afin de résoudre le problème de sécurité, il faut souvent qu’une partie des données soit rendue complètement ou partiellement illisible, non déchiffrable ou accessible
* Mauvaise herbe
Activités scientifiques
L’équipe ICAR est structurée suivant 3 axes : Analyse & Traitement (AT), Codage & Protection (CP) et Modélisation & Visualisation (MV). Un ensemble de développements théoriques ou applicatifs se retrouvent dans ces trois axes thématiques. Quelques résultats sont accessibles en ligne sur www.lirmm.fr/image/en_ligne.
Les principaux domaines applicatifs concernent le médical, le patrimoine culturel (artistique et paléontologique), la sécurité, la robotique, l’agronomie et l’industrie manufacturière. Ces travaux ont permis des échanges internationaux avec, entre autres, l’Espagne, la Biélorussie, le Canada et la Tunisie, et la venue de 3 professeurs invités.
Analyse & TraitementL’axe Analyse et Traitement d’images développe des techniques robustes de traitement du signal et de l’image. Son activité sur les 5 dernières années a concerné la vision omnidirectionnelle, la reconstruction d’images de tomographie d’émission et d’images super-résolues, l’estimation statistique et l’imagerie hyperspectrale et satellitaire.En vision omnidirectionnelle, nous avons montré qu’il était possible d’utiliser un capteur omnidirectionnel catadioptrique pour estimer la posture d’un robot humanoïde avec une meilleure précision que celle qui pourrait être obtenue avec une centrale inertielle. Nous avons développé une méthode de filtrage des images omnidirectionnelles prenant en compte leur nature anamorphosée [JCfss08]. Cette technique se base sur une adaptation projective des techniques classiques.En tomographie d’émission, nous avons proposé une nouvelle méthode de reconstruction permettant d’estimer l’erreur due aux variations statistiques des mesures de projection. Cette méthode a été validée sur des fantômes physiques et numériques. Elle s’appuie sur une nouvelle théorie du traitement du signal, que nous avons mis au point, permettant de modéliser le fait que la réponse impulsionnelle d’un système de mesure est connue de façon imprécise. Nous avons montré que ce type de traitement du signal, appliqué aux images, se situe à mi-chemin entre le filtrage convolutif classique et la morphologie mathématique [CMjnm11].Nous avons proposé d’inverser cette modélisation avec des techniques itératives dédiées, réalisant ainsi une sorte de déconvolution aveugle, sans estimation du noyau de convolution. Une des particularités importantes de cette nouvelle famille de techniques est qu’elle quantifie naturellement l’erreur d’estimation. Ce filtrage, d’un nouveau type, est utilisé pour construire, de façon robuste à la méconnaissance du procédé d’acquisition, des images super-résolues à partir d’un ensemble d’images basse-résolution d’une même scène. Parallèlement, nous avons développé de nouveaux estimateurs de densité basés sur la théorie des capacités de Choquet [SRsc12]. En collaboration avec des chercheurs en géosciences, nous avons développé une technique d’estimation du
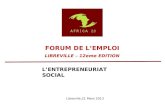
Figure 1 - Images de basse résolution et image «super-résolue»
Figure 2 - Mesure de débit de fleuve

uniquement à des personnes autorisées. Dans le contexte de cette problématique, l’axe CP a travaillé dans la sécurisation des données visuelles par insertion de données cachées et par chiffrement robustes à la compression. Entre 2008 et 2012, l’axe CP a développé de nouveaux algorithmes combinant insertion de données cachées, cryptage et compression des données visuelles [HPspic13].En 2010 nous avons débuté une activité de recherche autour de la stéganographie et de la stéganalyse. La stéganographie est l’étude de la communication secrète et consiste à modifier un média pour y cacher un message secret tel que les modifications soient statistiquement indécelables.
La stéganalyse est l’art de détecter la présence d’un message caché dans un média. Le tatouage et la stéganographie partagent le même objectif d’insertion d’un message, et à ce titre beaucoup de mécanismes communs, et une même culture. Nous avons développé des schémas stéganographiques sûrs, par l’étude de codes performants et l’invisibilité statistique.Nous avons mis en place un nouveau paradigme : la stéganographie par base de données d’images, et proposé l’algorithme de stéganographie adaptative par oracle (ASO : Adaptative Steganography by Oracle). Cet algorithme donne les résultats les plus sûrs de l’état de l’art en stéganographie d’images.Nous continuons également nos travaux sur le chiffrement sélectif des données visuelles. Afin de protéger visuellement le contenu d’images ou de vidéos, il n’est pas nécessaire d’appliquer un chiffrement complet des données numériques. En effet, il suffit parfois de sélectionner un faible pourcentage des données et de le chiffrer pour avoir un bon niveau de protection. La difficulté vient du fait d’essayer de perturber le moins possible les codeurs de compression tels que JPEG2000 pour les images ou MPEG-4/H.264 pour les vidéos. Nous avons développé des méthodes s’insérant principalement
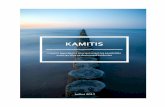
Figure 3 - Insertion informée «par rotation» accélérant l’approche de tatouage Dirty Paper Trellis Code. Il s’agit de déplacer le signal hôte x
dans la région de Voronoï du mot de code c*.
au niveau des codeurs entropiques après les étapes de quantification [SCtcsvt11].Pour la protection des objets 3D, le problème de synchronisation des sommets vient s’ajouter en termes de sécurité. Afin de conserver la précision initiale des objets 3D, en partenariat avec l’axe MV, nous avons développé des approches de synchronisation pour du tatouage basées sur le parcours d’arbres et en particulier en utilisant les arbres de recouvrement minimum.
Modélisation & VisualisationAvec l’évolution des instruments de mesure et de calcul et la généralisation de la simulation numérique à un grand nombre de disciplines scientifiques, de grands ensembles de données à plusieurs dimensions et échelles sont fréquemment produits. Sur ces jeux de données, des analyses et des recherches doivent être effectuées. Et même si l’information est bien présente dans les données brutes, la trouver et l’exploiter devient une tâche ardue lorsque les données sont très nombreuses et complexes.
De ce fait, apparaît le besoin de fournir un maximum d’information utile, sous la forme la plus efficace et intuitive possible, que ce soit pour la présentation ou la manipulation [BScad13]. La visualisation interactive en 2D/3D, permet d’améliorer la perception et la compréhension des données : il devient alors plus aisé de détecter des anomalies, d’identifier des tendances et d’explorer l’information lorsqu’une visualisation est utilisée. De surcroît, nous nous intéressons aux nouveaux dispositifs et modèles d’interaction (réalité virtuelle et augmentée) pour l’adapter aux supports d’interaction et aux capacités motrices/cognitives des utilisateurs.
D’autre part, les méthodes de modélisation permettent d’extraire des informations pertinentes, de représenter les données avec des formulations synthétiques génériques. Il devient alors possible de simuler des objets
Figure 4 - Chiffrement sélectif réduit de vidéos H.264 par GoP de 2 frames (IP)
Figure 5 - Modèle personnalisé de hanche reconstruit à partir d’IRMs.
Figure 6 - Convection à l’intérieur d’une étoile

Faits marquants
• En 2011 : Benoit LANGE, doctorant de l’axe MV, a reçu l’IBM PhD Fellowship Award. Ce prix récompense ses travaux de recherche effectué avec IBM dans le cadre du projet FUI RIDER (Research for It Driven Energy Efficiency) en visualisation de données.
• En 2011 : intégration d’un second chargé de recherche CNRS : Benjamin Gilles, travaillant sur la modélisation 3D anatomique et la simulation biomécanique.
• Très forte implication de l’équipe pour le transfert technologique en témoigne les 17 soutiens et collaborations avec des entreprises régionales (startup, PME, …) dans le cadre de contrats CIFRE ou d’équipe-conseil pour la période 2008-2013: C4W, IMAIOS, AUTHENTICATION INDUSTRIES, INTRASENSE, AKEO+, AQUAFADAS, FOGALE NANOTECH, AABAM SAS, URBSIM, ALCI, TECNALIA, MESCLADO, VODNET, SETTINOV, NATURALPAD, BERGER-LEVRAULT.
ou des phénomènes et de corréler les résultats à la réalité [LRintech12].
Un domaine privilégié est la modélisation automatisée et personnalisée de l’anatomie à partir de données hétérogènes (images médicales multimodales 3D, acquisitions surfaciques), dont les applications vont du diagnostic médical à la paléoanthropologie, en passant par la biomécanique [GBacmtg11].
Figure 7 - Numérisation 3D des restes fossiles. © B. Moreno, société IMA Solutions
Collaborations externes
• Projet FUI RIDER (2009-2013) : le projet RIDER (Reasearch for IT Driven EneRgy efficiency) a pour objectif de développer un système d’information innovant permettant d’optimiser la consommation énergétique d’un bâtiment ou d’un groupe de bâtiments. Le consortium est constitué du LIRMM, de l’IES, de PROMES (Université de Perpignan), ainsi que des partenaires industriels IBM, EDF, Cofely GDF-Suez, Pyrescom, Coronis, ASA et Enoleo.
• Société NaturalPad (2013) : NaturalPad, créée par d’anciens doctorants du LIRMM, développe des jeux sérieux à but thérapeutiques, en collaboration avec
le LIRMM et le M2H, en utilisant les interfaces grand public (Wii, Kinect, caméras).
• Société ALCI (2012) : créée par d’anciens doctorants du LIRMM, elle s’est spécialisée dans la robotique et la vision. Nous leur avons permis de détecter, uniquement avec un contrôle par caméras, de multiples défauts dans la fabrication de tuiles en terre cuite, tels que des fissures et du fluage. Grâce à ces algorithmes, ALCI a pu réaliser un robot qui est maintenant sur les chaînes de production.
• Projet CNRS PEPS SEMYO (2012-2013): ce projet coordonné par le LIRMM, en partenariat avec l’institut de myologie de la Pitié-Salpêtrière à Paris et l’INRIA Grenoble, traite de l’analyse automatique d’images IRM du système musculo-squelettique humain. Le but est l’amélioration du diagnostic et du suivi assisté par ordinateur de myopathies.
• Le projet VOODDO (2007-2010) de l’ANR Audiovisuel et Multimédia : nous a permis de collaborer avec la société régionale Vodnet, la Ligue Nationale de Rugby et l’équipe MAORE du LIRMM afin de protéger la diffusion de vidéos sportives sur Internet.
Publications majeures
• [SCtcsvt11] Z. Shahid, M. Chaumont et W. Puech, Fast Protection of H.264/AVC by Selective Encryption of CAVLC and CABAC for I & P frames, IEEE Trans. on Circuits and Systems for Video Technology, Vol. 9, 2011.
• [GBacmtg11] B. Gilles, G. Bousquet, F. Faure, D.K. Pai, Frame-based Elastic Models, ACM Trans. on Graphics, presented at SIGGRAPH, Vol. 30(2), No. 15, 2011.
• [JCfss08] F. Jacquey, F. Comby and O. Strauss, Fuzzy edge detection for omnidirectional images, Fuzzy Sets and Systems 159, Vol. 15 (2008), pp. 1991-2010.
• [BScad13] R. Bénière, G. Subsol, G. Gesquière, F. Le Breton, W. Puech, A comprehensive process of reverse engineering from 3D meshes to CAD model, computer-Aided Design, Vol. 45, No. 11, pp. 1382–1393, 2013.
• [SRsc12] O. Strauss, A. Rico, Towards interval-based non-additive deconvolution in signal processing, Soft Computing - A Fusion of Foundations, Methodologies and Applications, 2012, Vol. 16, No. 5, pp. 809-820