5) 6) 7) 8) 9) INTRODUCTION TO - Courses · 2018-09-20 · BAYESIAN NETWORKS • A Bayesian network...
33
v=1 v=–1 v=–1 v=–1 v=–1 v=1 optima O O O X X O O O X X X X O O O X X X X O O O X X X X O OO X X X O O O X X X O O O O O X X X X O X O X O O X 2) 3) 5) 6) 7) 8) 9) 12) O O O O X X X X O 11) O O O O X X X O X O 13) O O INTRODUCTION TO ARTIFICIAL INTELLIGENCE DATA15001 EPISODE 6: BAYESIAN NETWORKS
Transcript of 5) 6) 7) 8) 9) INTRODUCTION TO - Courses · 2018-09-20 · BAYESIAN NETWORKS • A Bayesian network...

v=1v=–1 v=–1 v=–1
v=–1 v=1
v=–1
optimaalin
en peli
O O
O
XX
O O
O
XXX X
O O
OX
XX X
OO
O
X
XX X
O
O OX
XX
O
O
O
X
XXO
O
O
O
O
X
XX XO
XO
XO
OX
2) 3)
5) 6) 7) 8) 9)
12)
O
O O
OX
XX XO
11)
O O
O
OX
XXO
XO
13)
OO
I N T R O D U C T I O N T O A R T I F I C I A L I N T E L L I G E N C E
D A TA 1 5 0 0 1
E P I S O D E 6 : B A Y E S I A N N E T W O R K S

1. N E T W O R K S T R U C T U R E S
2. C A R E X A M P L E
3. I N F E R E N C E ( E X A C T A N D A P P R O X I M AT E )
T O D A Y ’ S M E N U

B AY E S I A N N E T W O R K S
• A Bayesian network is a representation of a probabilistic model
• The nodes of the network (X, Y, Z, Å) are random variables (r.v.) such as the result of a die, or a medical condition, ...
• The edges correspond to direct dependency: no edge ⇔ conditional independence (exact definition will be studied in DATA12002 Probabilistic Graphical Models)
• Each r.v. is given a conditional distribution of the form P(V = v | PaV = pav), where PaV are the parents of node V
ZX
Y
Å

B AY E S I A N N E T W O R K S
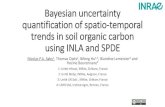
• No directed cycles allowed
• Joint probabilities are obtained as P(x,y,z,å) = P(x) P(y) P(z | x,y) P(å | x)
ZX
Y
Å
PARENTSZ
B AY E S I A N N E T W O R K S
• No directed cycles allowed
• Joint probabilities are obtained as P(x,y,z,å) = P(x) P(y) P(z | x,y) P(å | x)
• Compare this with the chain rule P(x,y,z,å) = P(x) P(y | x) P(z | x,y) P(å | x,y,z)
ZX
Y
Å
c o n d i t i o n a l i n d e p e n d e n c e !

B AY E S I A N N E T W O R K S
• The power of BNs: – easier to define conditional distributions, e.g.,
P(å | x) rather than P(å | x,y,z) – efficient inference procedures for computing posterior
probabilities
ZX
Y
Å

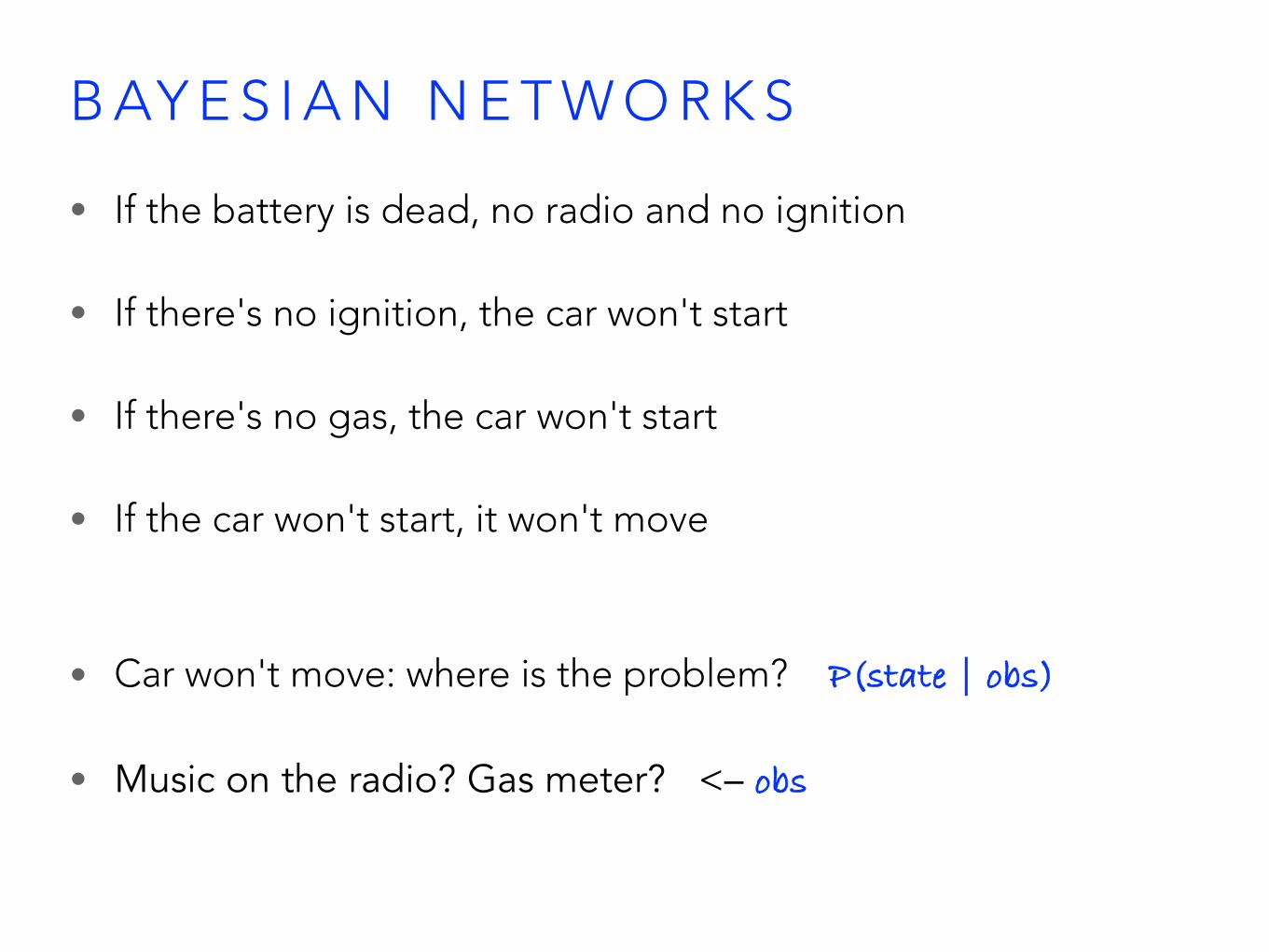
E X A M P L E : C A R P R O B L E M S ?

RADIO
BATTERY
IGNITION GAS
STARTS
MOVES
E X A M P L E : C A R P R O B L E M S ?
B AY E S I A N N E T W O R K S
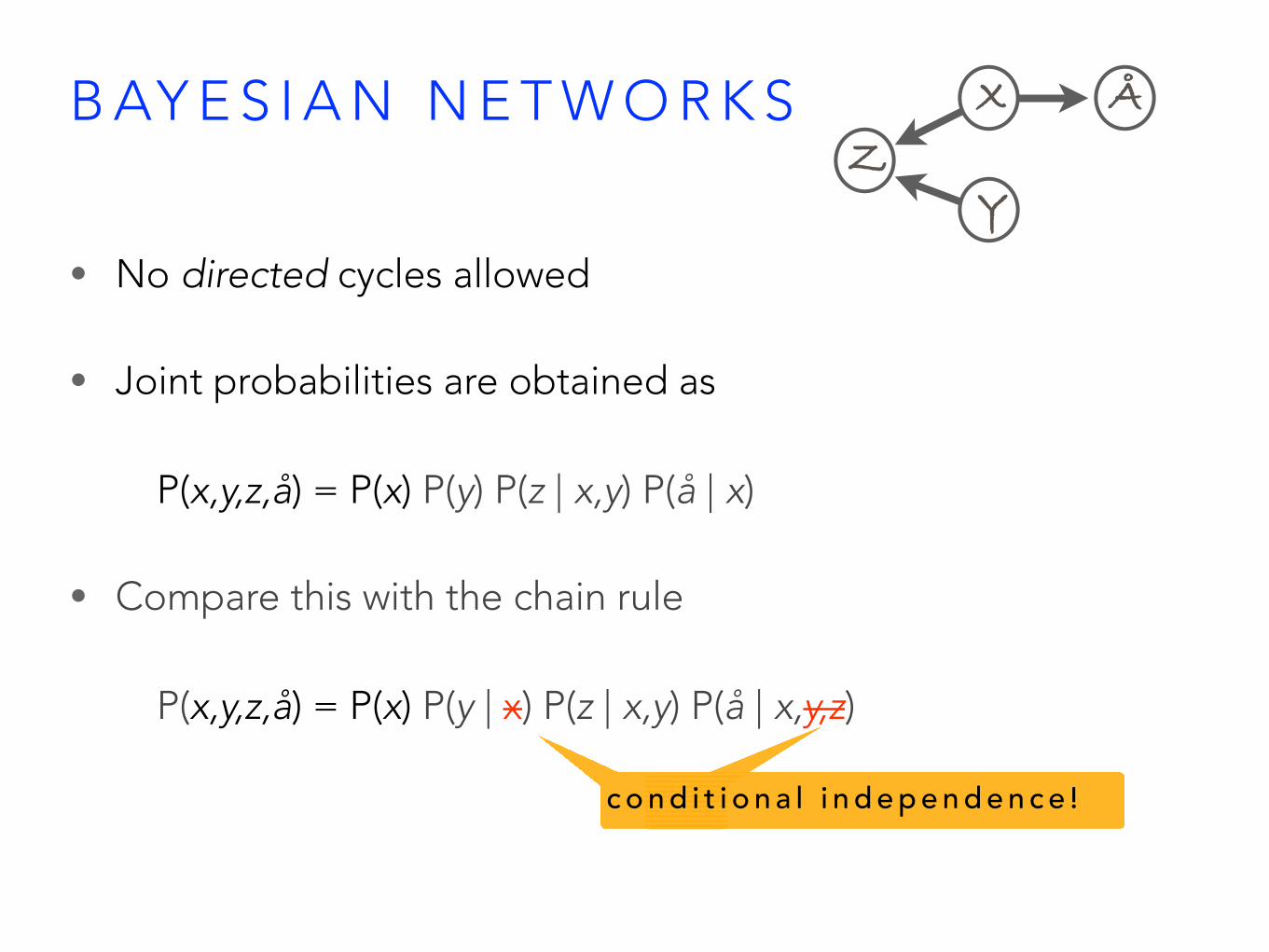
• If the battery is dead, no radio and no ignition
• If there's no ignition, the car won't start
• If there's no gas, the car won't start
• If the car won't start, it won't move
• Car won't move: where is the problem? P(state | obs)
• Music on the radio? Gas meter? <– obs
RADIO
BATTERY
IGNITION GAS
STARTS
MOVES
[R.I.P. Chester Bennington (1976–2017)]
E X A M P L E : C A R P R O B L E M S ?

RADIO
BATTERY
IGNITION GAS
STARTS
MOVES
E X A M P L E : C A R P R O B L E M S ?
q u i t e s u r e ?

RADIO
BATTERY
IGNITION GAS
STARTS
MOVES
E X A M P L E : C A R P R O B L E M S ?
9 5 % p r o b .

RADIO
BATTERY
IGNITION GAS
STARTS
MOVES
E X A M P L E : C A R P R O B L E M S ?
9 5 % p r o b .9 0 % p r o b . 9 9 % p r o b .
9 9 % p r o b .
9 0 % p r o b .
9 5 % p r o b .

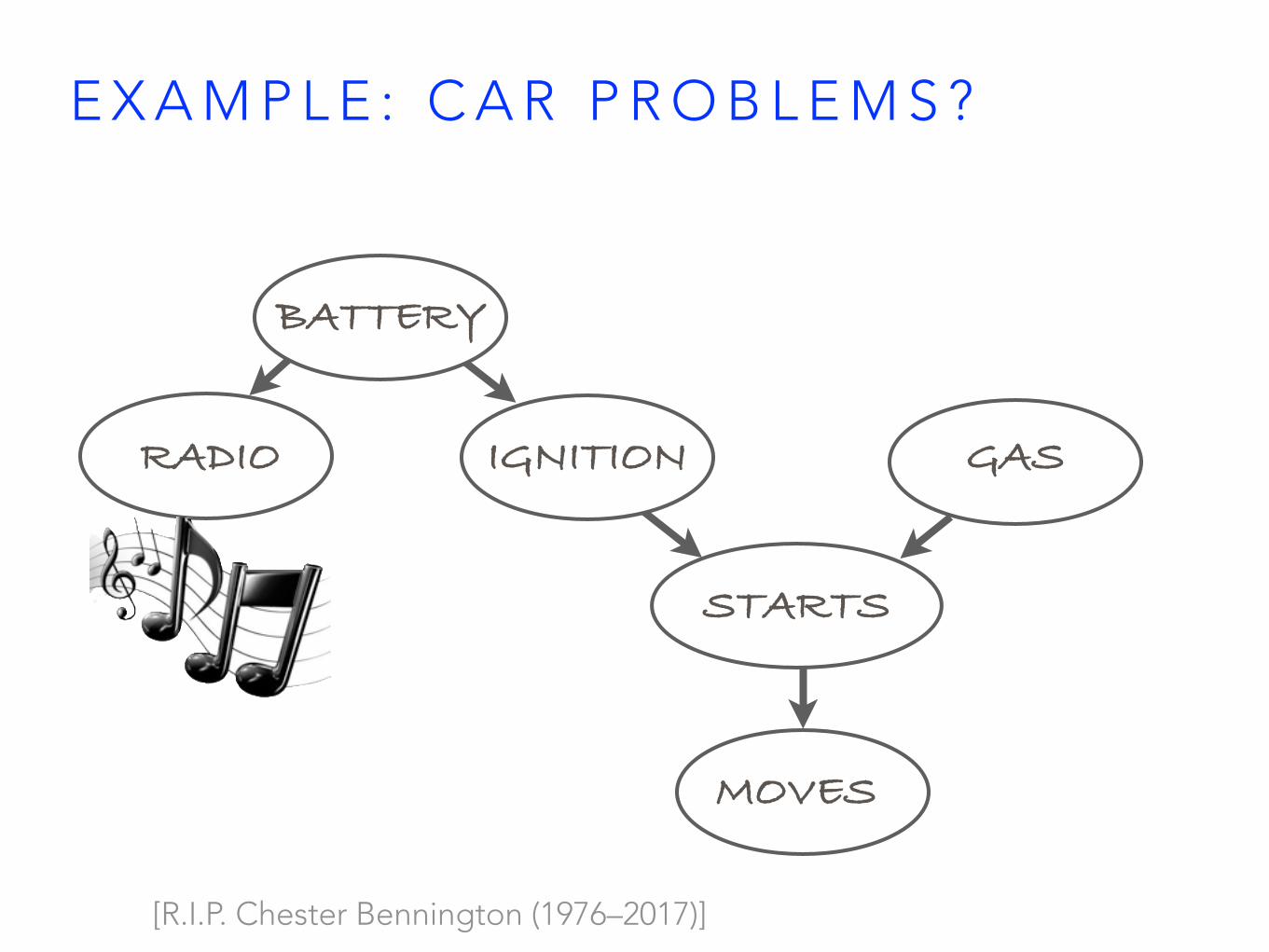
• P(“battery alive”) = 0.9
• P(“radio ok” | “battery alive”) = 0.9P(“radio ok” | ¬”battery alive”) = 0
• p(“ignition” | “battery alive”) = 0.95P(“ignition” | ¬”battery alive”) = 0
• p(“gas”) = 0.95
• p(“starts” | “ignition” AND “gas”) = 0.99p(“starts” | ¬”ignition” OR ¬”gas”) = 0
• p(“moves” | “starts”) = 0.99p(“moves” | ¬”starts”) = 0
E X A M P L E : C A R P R O B L E M S ?

• P(“battery alive” | ¬“starts” AND “radio ok” AND "gas") = ?
• Exact approach: P(B,¬S,R,G) P(B | ¬S,R,G) = ----------- P(¬S,R,G) P(B,¬S,R,G) = P(B,R,I,G,¬S,M) + P(B,R,I,G,¬S,¬M) + P(B,R,¬I,G,¬S,M) + P(B,R,¬I,G,¬S,¬M)
• Again, the probability of an event, (B,¬S,R,G), is a sum of atomic (elementary) event probabilities
E X A M P L E : C A R P R O B L E M S ?
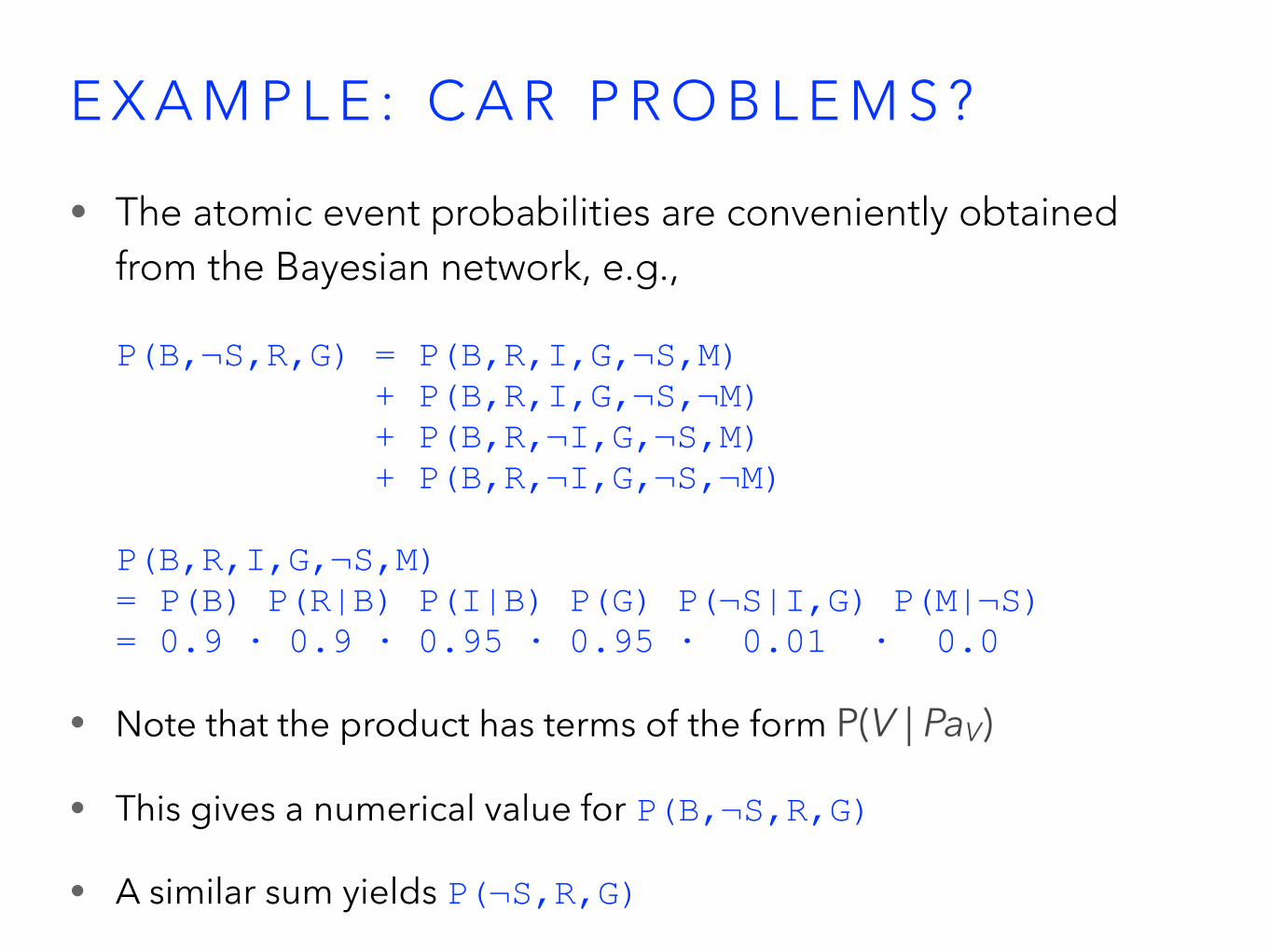
• The atomic event probabilities are conveniently obtained from the Bayesian network, e.g.,P(B,¬S,R,G) = P(B,R,I,G,¬S,M) + P(B,R,I,G,¬S,¬M) + P(B,R,¬I,G,¬S,M) + P(B,R,¬I,G,¬S,¬M) P(B,R,I,G,¬S,M) = P(B) P(R|B) P(I|B) P(G) P(¬S|I,G) P(M|¬S) = 0.9 · 0.9 · 0.95 · 0.95 · 0.01 · 0.0
• Note that the product has terms of the form P(V | PaV)
• This gives a numerical value for P(B,¬S,R,G)
• A similar sum yields P(¬S,R,G)
E X A M P L E : C A R P R O B L E M S ?

• This direct approach always gives the exact solution
• However, the sums can quickly become very large (no. of terms is exponential in the size of the network)
• More clever inference algorithms exploit the structure of the network
• For example, in tree-shaped networks (any two nodes are connected by at most one path), belief propagation runs in linear time wrt. number of nodes
• These algorithms are not discussed on this course
E X A M P L E : C A R P R O B L E M S ?

• Instead of exact inference algorithms, we take a "hackers approach" to probability
• The probability of any event can be approximated by the Monte Carlo method / sampling: repeat the trial many times and calculate the relative frequency of the event
• E.g., toss a coin 106 times: P(heads) ≈ #heads / #tosses
• To approximate conditional probability P(A | B):
1. generate N tuples (A, B)
2. discard all but those where B occurs
3. among the remaining tuples, calculate the portion where A occurs
A P P R O X I M AT E I N F E R E N C E
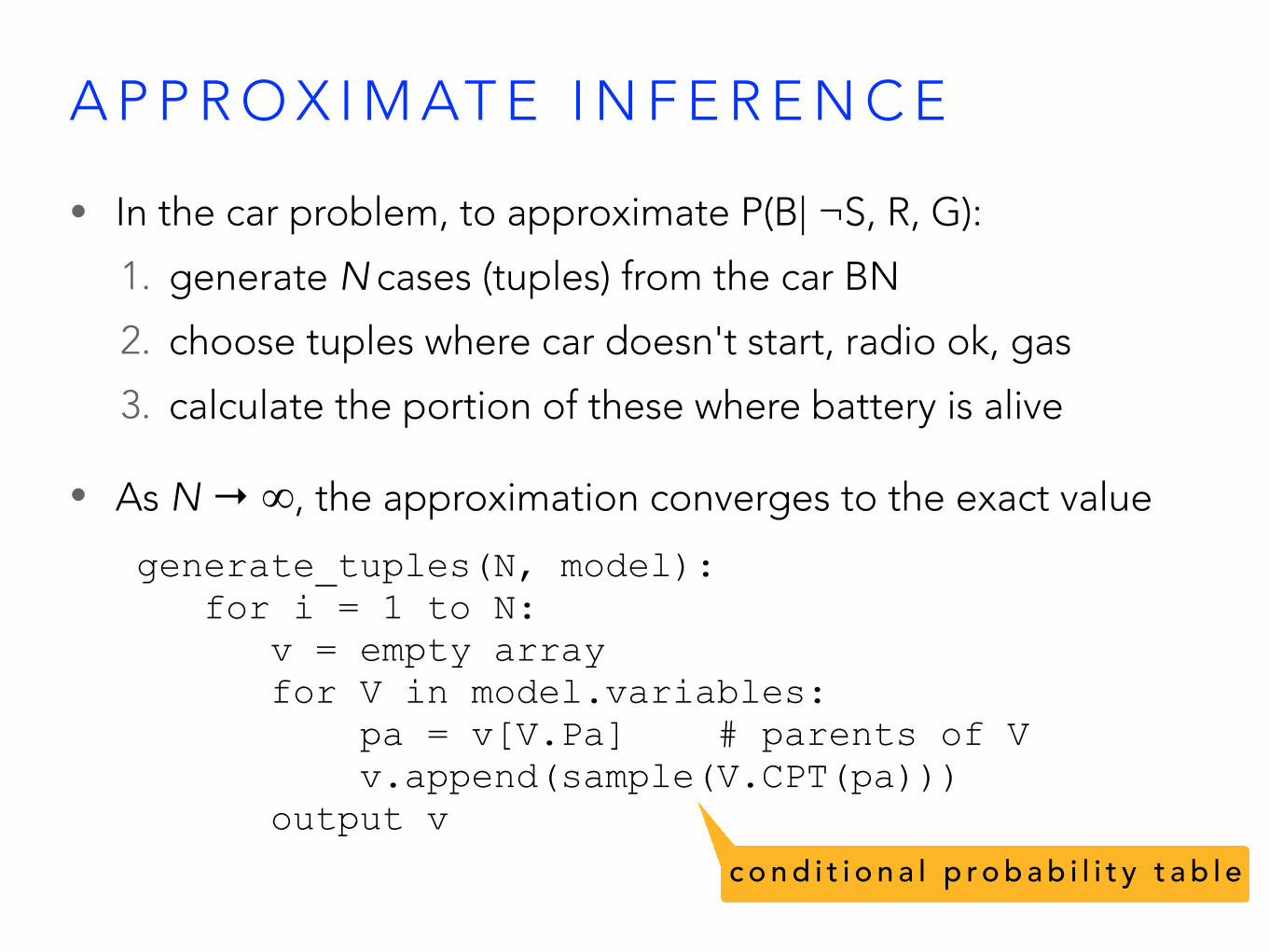
• In the car problem, to approximate P(B| ¬S, R, G):
1. generate N cases (tuples) from the car BN
2. choose tuples where car doesn't start, radio ok, gas
3. calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [] V = 'B' V.Pa = pa = [] V.CPT(pa) = [0.1, 0.9]
∅

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [1] V = 'R' V.Pa = 'B' pa = [1] V.CPT(pa) = [0.1, 0.9]
C P T o f ' R a d i o ' : ( 1 . 0 , 0 . 0 ) i f B a t t e r y = 0 ( 0 . 1 , 0 . 9 ) i f B a t t e r y = 1

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [1,1] V = 'I' V.Pa = 'B' pa = [1] V.CPT(pa) = [0.05, 0.95]

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [1,1,1] V = 'G' V.Pa = pa = [] V.CPT(pa) = [0.05, 0.95]
∅
• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
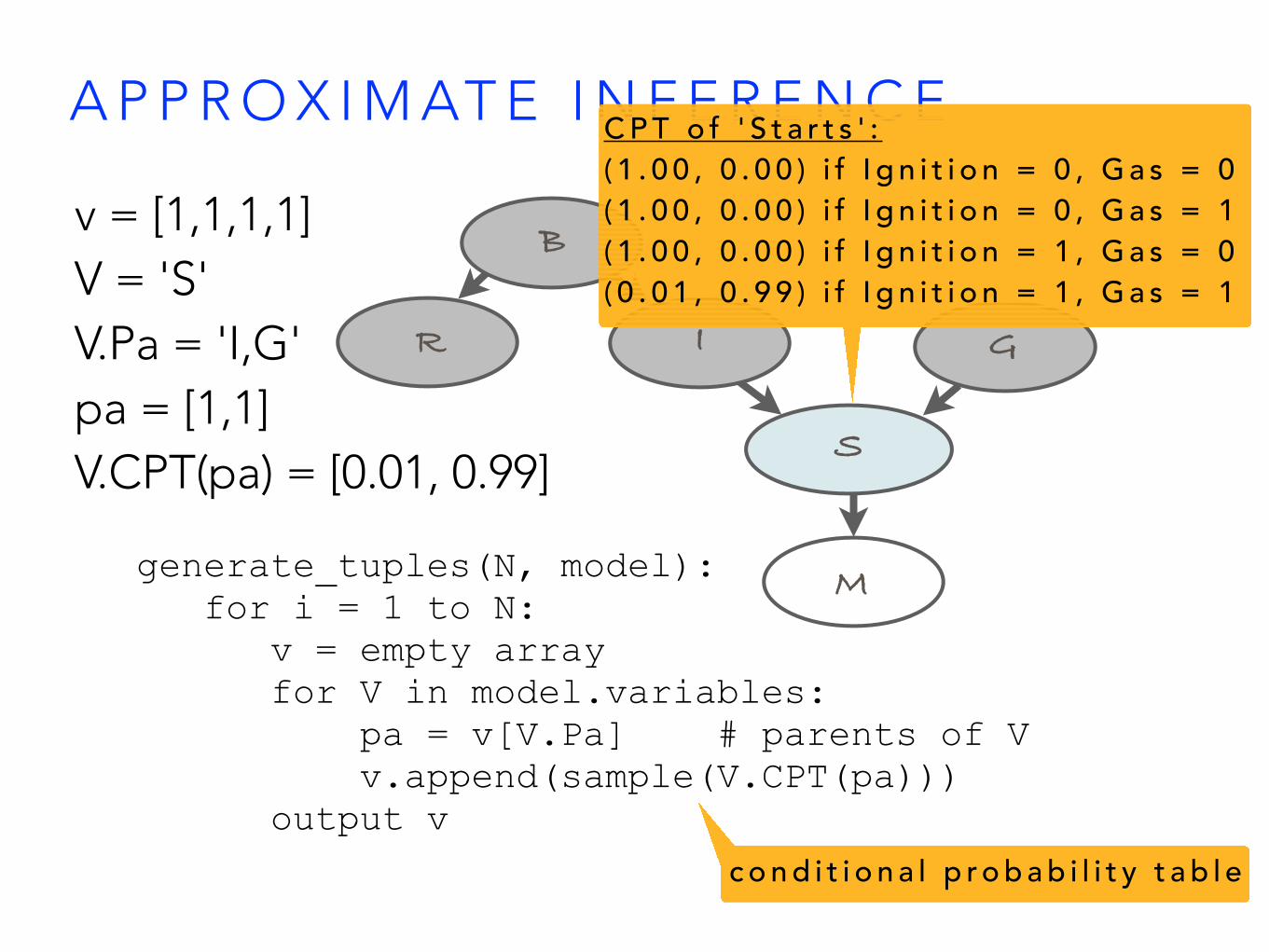
v = [1,1,1,1] V = 'S' V.Pa = 'I,G' pa = [1,1] V.CPT(pa) = [0.01, 0.99]
C P T o f ' S t a r t s ' : ( 1 . 0 0 , 0 . 0 0 ) i f I g n i t i o n = 0 , G a s = 0 ( 1 . 0 0 , 0 . 0 0 ) i f I g n i t i o n = 0 , G a s = 1 ( 1 . 0 0 , 0 . 0 0 ) i f I g n i t i o n = 1 , G a s = 0 ( 0 . 0 1 , 0 . 9 9 ) i f I g n i t i o n = 1 , G a s = 1

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [1,1,1,1,1] V = 'M' V.Pa = 'S' pa = [1] V.CPT(pa) = [0.01, 0.99]

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [1,1,1,1,1,1]

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [1,1,1,0,0,0]

• In the car problem, to approximate P(B| ¬S, R, G):
• generate N cases (tuples) from the car BN
• choose tuples where car doesn't start, radio ok, gas
• calculate the portion of these where battery is alive
• As N → ∞, the approximation converges to the exact value
generate_tuples(N, model): for i = 1 to N: v = empty array for V in model.variables: pa = v[V.Pa] # parents of V v.append(sample(V.CPT(pa))) output v
A P P R O X I M AT E I N F E R E N C E
c o n d i t i o n a l p r o b a b i l i t y t a b l e
R
B
I G
S
M
v = [1,1,0,1,0,0]
• Spam filter! (and million other naive Bayes classifiers)
• Dynamic Bayesian networks for ecological modelling
• Medical diagnostics (causal factors –> disease status –> symptoms)
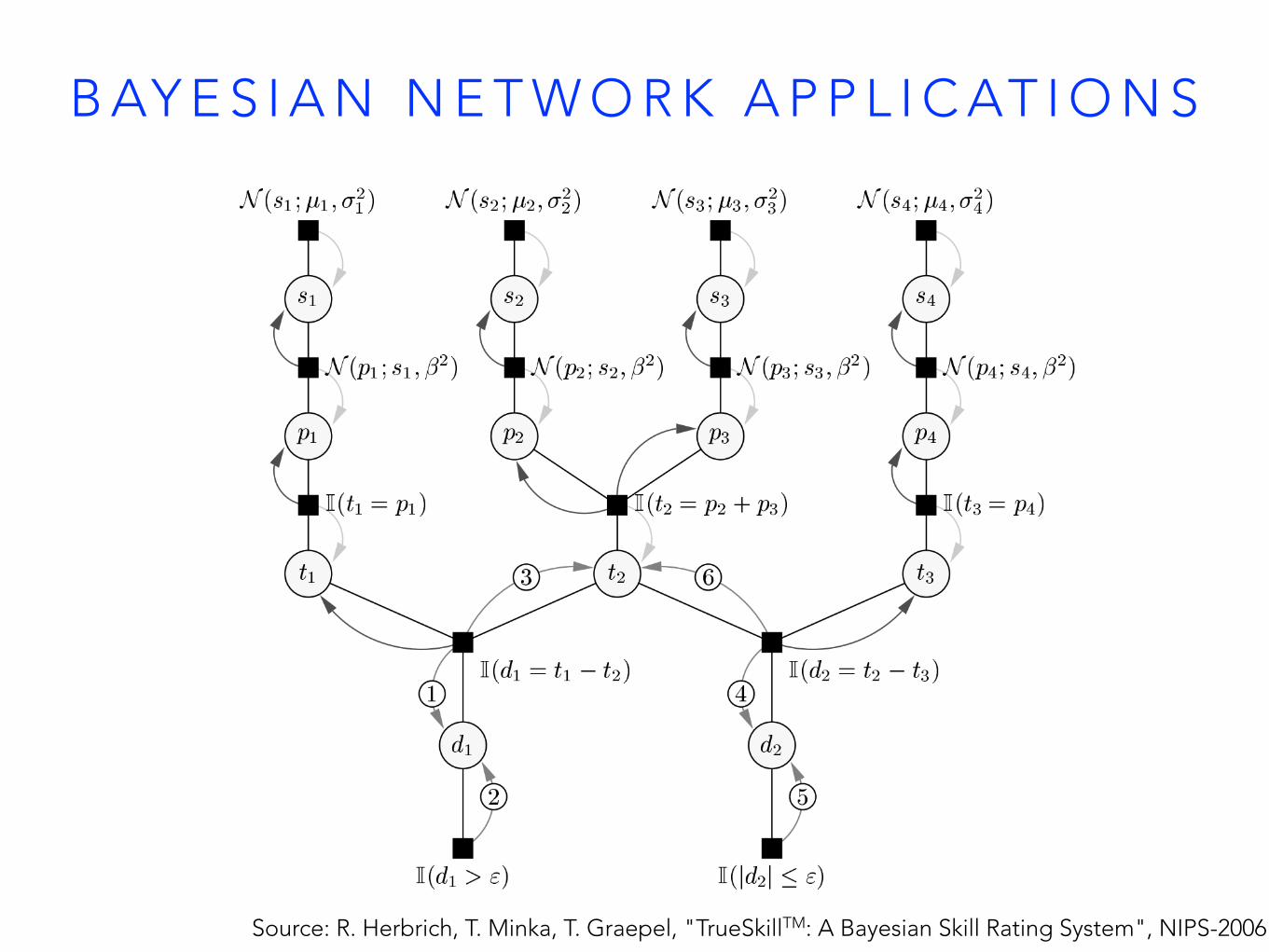
• Player matching: Microsoft TrueSkillTM
(well, factors graphs really, but closely related graphical models)
B AY E S I A N N E T W O R K A P P L I C AT I O N S
B AY E S I A N N E T W O R K A P P L I C AT I O N S
Source: R. Herbrich, T. Minka, T. Graepel, "TrueSkillTM: A Bayesian Skill Rating System", NIPS-2006
• Spam filter! (and million other naive Bayes classifiers)
• Dynamic Bayesian networks for ecological modelling
• Medical diagnostics (causal factors –> disease status –> symptoms)
• Player matching: Microsoft TrueSkillTM
(well factors graphs really, but closely related graphical models)
• Error correcting codes ("Turbo codes", e.g., Mars mission)
• Football score prediction
• ...
B AY E S I A N N E T W O R K A P P L I C AT I O N S

1. N E T W O R K S T R U C T U R E S
2. C A R E X A M P L E
3. I N F E R E N C E ( E X A C T A N D A P P R O X I M AT E )
S U M M A R YZ
X
Y
Å
[1,1,1,1,1,1][1,1,1,0,0,0] [1,1,0,1,0,0] ⋮
P(B,¬S,R,G) P(B | ¬S,R,G) = ----------- P(¬S,R,G)
N E X T W E E K : M A C H I N E L E A R N I N G


















