1.3 La conversion des unités - cheneliere.info · le suivant: pour convertir des centimètres...
20
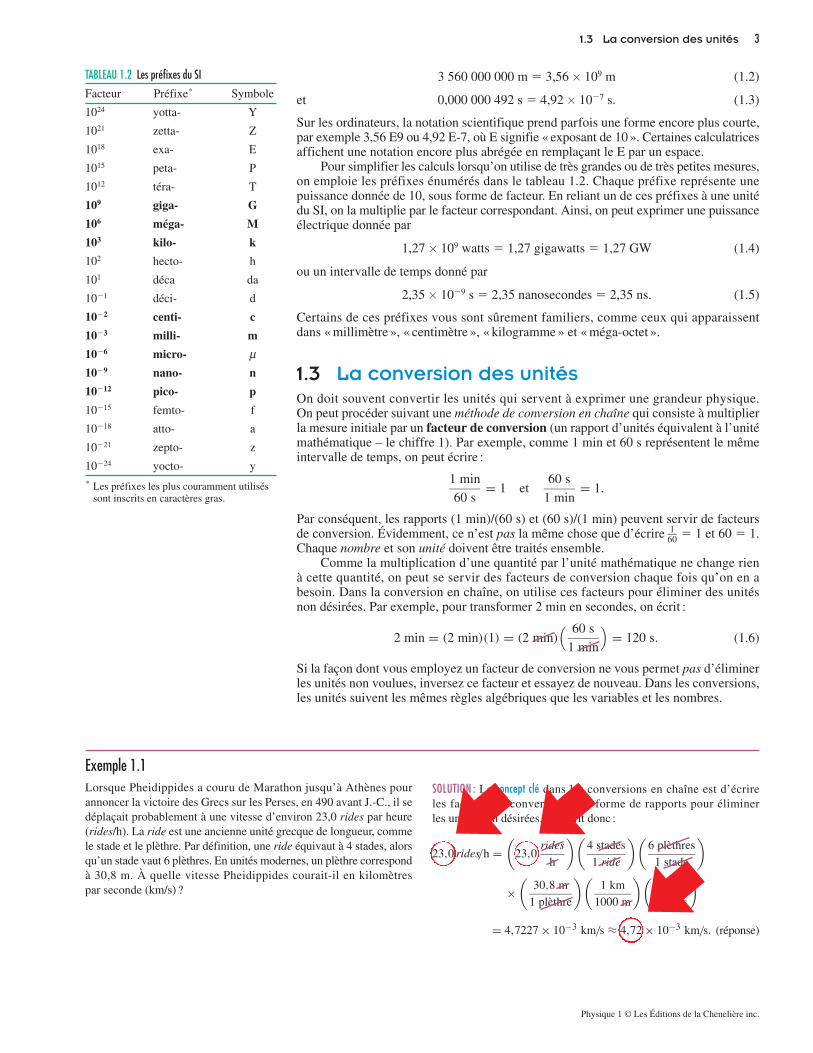
Physique 1 © Les Éditions de la Chenelière inc. 1.3 La conversion des unités 3 3 560 000 000 m 3,56 10 9 m (1.2) et 0,000 000 492 s 4,92 10 7 s. (1.3) Sur les ordinateurs, la notation scientifique prend parfois une forme encore plus courte, par exemple 3,56 E9 ou 4,92 E-7, où E signifie « exposant de 10 ». Certaines calculatrices affichent une notation encore plus abrégée en remplaçant le E par un espace. Pour simplifier les calculs lorsqu’on utilise de très grandes ou de très petites mesures, on emploie les préfixes énumérés dans le tableau 1.2. Chaque préfixe représente une puissance donnée de 10, sous forme de facteur. En reliant un de ces préfixes à une unité du SI, on la multiplie par le facteur correspondant. Ainsi, on peut exprimer une puissance électrique donnée par 1,27 10 9 watts 1,27 gigawatts 1,27 GW (1.4) ou un intervalle de temps donné par 2,35 10 9 s 2,35 nanosecondes 2,35 ns. (1.5) Certains de ces préfixes vous sont sûrement familiers, comme ceux qui apparaissent dans « millimètre », « centimètre », « kilogramme » et « méga-octet ». 1.3 La conversion des unités On doit souvent convertir les unités qui servent à exprimer une grandeur physique. On peut procéder suivant une méthode de conversion en chaîne qui consiste à multiplier la mesure initiale par un facteur de conversion (un rapport d’unités équivalent à l’unité mathématique – le chiffre 1). Par exemple, comme 1 min et 60 s représentent le même intervalle de temps, on peut écrire : 1 min 60 s = 1 et 60 s 1 min = 1. Par conséquent, les rapports (1 min)/(60 s) et (60 s)/(1 min) peuvent servir de facteurs de conversion. Évidemment, ce n’est pas la même chose que d’écrire 1 60 1 et 60 1. Chaque nombre et son unité doivent être traités ensemble. Comme la multiplication d’une quantité par l’unité mathématique ne change rien à cette quantité, on peut se servir des facteurs de conversion chaque fois qu’on en a besoin. Dans la conversion en chaîne, on utilise ces facteurs pour éliminer des unités non désirées. Par exemple, pour transformer 2 min en secondes, on écrit : 2 min = (2 min)(1) = (2 min) 60 s 1 min = 120 s. (1.6) Si la façon dont vous employez un facteur de conversion ne vous permet pas d’éliminer les unités non voulues, inversez ce facteur et essayez de nouveau. Dans les conversions, les unités suivent les mêmes règles algébriques que les variables et les nombres. TABLEAU 1.2 Les préfixes du SI Facteur Préfixe * Symbole 10 24 yotta- Y 10 21 zetta- Z 10 18 exa- E 10 15 peta- P 10 12 téra- T 10 9 giga- G 10 6 méga- M 10 3 kilo- k 10 2 hecto- h 10 1 déca da 10 1 déci- d 10 2 centi- c 10 3 milli- m 10 6 micro- µ 10 9 nano- n 10 12 pico- p 10 15 femto- f 10 18 atto- a 10 21 zepto- z 10 24 yocto- y * Les préfixes les plus couramment utilisés sont inscrits en caractères gras. Exemple 1.1 Lorsque Pheidippides a couru de Marathon jusqu’à Athènes pour annoncer la victoire des Grecs sur les Perses, en 490 avant J.-C., il se déplaçait probablement à une vitesse d’environ 23,0 rides par heure (rides/h). La ride est une ancienne unité grecque de longueur, comme le stade et le plèthre. Par définition, une ride équivaut à 4 stades, alors qu’un stade vaut 6 plèthres. En unités modernes, un plèthre correspond à 30,8 m. À quelle vitesse Pheidippides courait-il en kilomètres par seconde (km/s) ? SOLUTION : Le concept clé dans les conversions en chaîne est d’écrire les facteurs de conversion sous forme de rapports pour éliminer les unités non désirées. On écrit donc : 23,0 rides /h = 23,0 rides h 4 stades 1 ride 6 plèthres 1 stade × 30,8m 1 plèthre 1 km 1000 m 1h 3 600 s = 4,7227 × 10 −3 km/ s ≈ 4,72 × 10 −3 km/ s. (réponse)
Transcript of 1.3 La conversion des unités - cheneliere.info · le suivant: pour convertir des centimètres...
Physique 1 © Les Éditions de la Chenelière inc.
1.3 La conversion des unités 3
3 560 000 000 m � 3,56 � 109 m (1.2)
et 0,000 000 492 s � 4,92 � 10�7 s. (1.3)
Sur les ordinateurs, la notation scientifique prend parfois une forme encore plus courte,par exemple 3,56 E9 ou 4,92 E-7, où E signifie « exposant de 10 ». Certaines calculatricesaffichent une notation encore plus abrégée en remplaçant le E par un espace.
Pour simplifier les calculs lorsqu’on utilise de très grandes ou de très petites mesures,on emploie les préfixes énumérés dans le tableau 1.2. Chaque préfixe représente unepuissance donnée de 10, sous forme de facteur. En reliant un de ces préfixes à une unitédu SI, on la multiplie par le facteur correspondant. Ainsi, on peut exprimer une puissanceélectrique donnée par
1,27 � 109 watts � 1,27 gigawatts � 1,27 GW (1.4)
ou un intervalle de temps donné par
2,35 � 10�9 s � 2,35 nanosecondes � 2,35 ns. (1.5)
Certains de ces préfixes vous sont sûrement familiers, comme ceux qui apparaissentdans « millimètre », « centimètre », « kilogramme » et « méga-octet ».
1.3 La conversion des unitésOn doit souvent convertir les unités qui servent à exprimer une grandeur physique. On peut procéder suivant une méthode de conversion en chaîne qui consiste à multiplierla mesure initiale par un facteur de conversion (un rapport d’unités équivalent à l’unitémathématique – le chiffre 1). Par exemple, comme 1 min et 60 s représentent le mêmeintervalle de temps, on peut écrire :
1 min
60 s= 1 et
60 s
1 min= 1.
Par conséquent, les rapports (1 min)/(60 s) et (60 s)/(1 min) peuvent servir de facteursde conversion. Évidemment, ce n’est pas la même chose que d’écrire 1
60 � 1 et 60 � 1.Chaque nombre et son unité doivent être traités ensemble.
Comme la multiplication d’une quantité par l’unité mathématique ne change rien à cette quantité, on peut se servir des facteurs de conversion chaque fois qu’on en abesoin. Dans la conversion en chaîne, on utilise ces facteurs pour éliminer des unitésnon désirées. Par exemple, pour transformer 2 min en secondes, on écrit :
2 min = (2 min)(1) = (2 min)( 60 s
1 min
)= 120 s. (1.6)
Si la façon dont vous employez un facteur de conversion ne vous permet pas d’éliminerles unités non voulues, inversez ce facteur et essayez de nouveau. Dans les conversions,les unités suivent les mêmes règles algébriques que les variables et les nombres.
TABLEAU 1.2 Les préfixes du SI
Facteur Préfixe* Symbole
1024 yotta- Y
1021 zetta- Z
1018 exa- E
1015 peta- P
1012 téra- T
109 giga- G
106 méga- M
103 kilo- k
102 hecto- h
101 déca da
10�1 déci- d
10�2 centi- c
10�3 milli- m
10�6 micro- µ10�9 nano- n
10�12 pico- p
10�15 femto- f
10�18 atto- a
10�21 zepto- z
10�24 yocto- y* Les préfixes les plus couramment utilisés
sont inscrits en caractères gras.
Exemple 1.1Lorsque Pheidippides a couru de Marathon jusqu’à Athènes pourannoncer la victoire des Grecs sur les Perses, en 490 avant J.-C., il sedéplaçait probablement à une vitesse d’environ 23,0 rides par heure(rides/h). La ride est une ancienne unité grecque de longueur, commele stade et le plèthre. Par définition, une ride équivaut à 4 stades, alorsqu’un stade vaut 6 plèthres. En unités modernes, un plèthre correspondà 30,8 m. À quelle vitesse Pheidippides courait-il en kilomètres par seconde (km/s) ?
SOLUTION : Le concept clé dans les conversions en chaîne est d’écrire les facteurs de conversion sous forme de rapports pour éliminer les unités non désirées. On écrit donc :
23,0 rides/h =(
23,0rides
h
)(4 stades
1 ride
)(6 plèthres
1 stade
)
×(
30,8 m
1 plèthre
)(1 km
1000 m
)(1 h
3 600 s
)
= 4,7227 × 10−3 km/s ≈ 4,72 × 10−3 km/s. (réponse)
Physique 1 © Les Éditions de la Chenelière inc.
4 Chapitre 1 Les mesures
1.4 La longueurEn 1792, la République française naissante a établi un nouveau système de poids et de mesures. Son élément fondamental était le mètre, défini comme le dix millionièmede la distance entre le pôle Nord et l’équateur. Plus tard, pour des raisons pratiques, cetétalon a été abandonné et on a défini le mètre comme étant la distance entre deux traitsfins gravés près des extrémités d’une barre faite d’un alliage de platine et d’iridium, la barre étalon du mètre, conservée au Bureau international des poids et mesures, prèsde Paris. On a alors distribué des reproductions exactes de cette barre à des laboratoiresde normalisation partout dans le monde. Ces étalons secondaires ont servi à fabriquerd’autres étalons encore plus accessibles de sorte qu’en fin de compte, tous les instrumentsde mesure tiraient leur légitimité de la barre du mètre étalon par une chaîne complexede comparaisons.
La science et la technologie modernes requéraient cependant un étalon plus précisque la distance entre deux traits fins sur une barre de métal. Par conséquent, on a adoptéen 1960 un nouvel étalon pour le mètre basé sur la longueur d’onde de la lumière. Plus précisément, le mètre a été redéfini comme étant 1 650 763,73 longueurs d’onde de la lumière rouge-orangé émise par les atomes du krypton 86 (un isotope, ou type, dekrypton) dans un tube à décharge gazeuse. On a choisi ce nombre peu commode de longueurs d’onde pour que le nouvel étalon soit très rapproché de l’ancien, celui de la barre du mètre.
Toutefois, en 1983, le besoin d’une plus grande précision était devenu tel que mêmel’étalon du krypton 86 ne pouvait le satisfaire. Cette année-là, on a donc redéfini le mètre comme étant la distance franchie par la lumière dans un intervalle de tempsdonné. La définition précise de la 17e Conférence générale des poids et mesuress’énonce comme suit :
Exemple 1.2
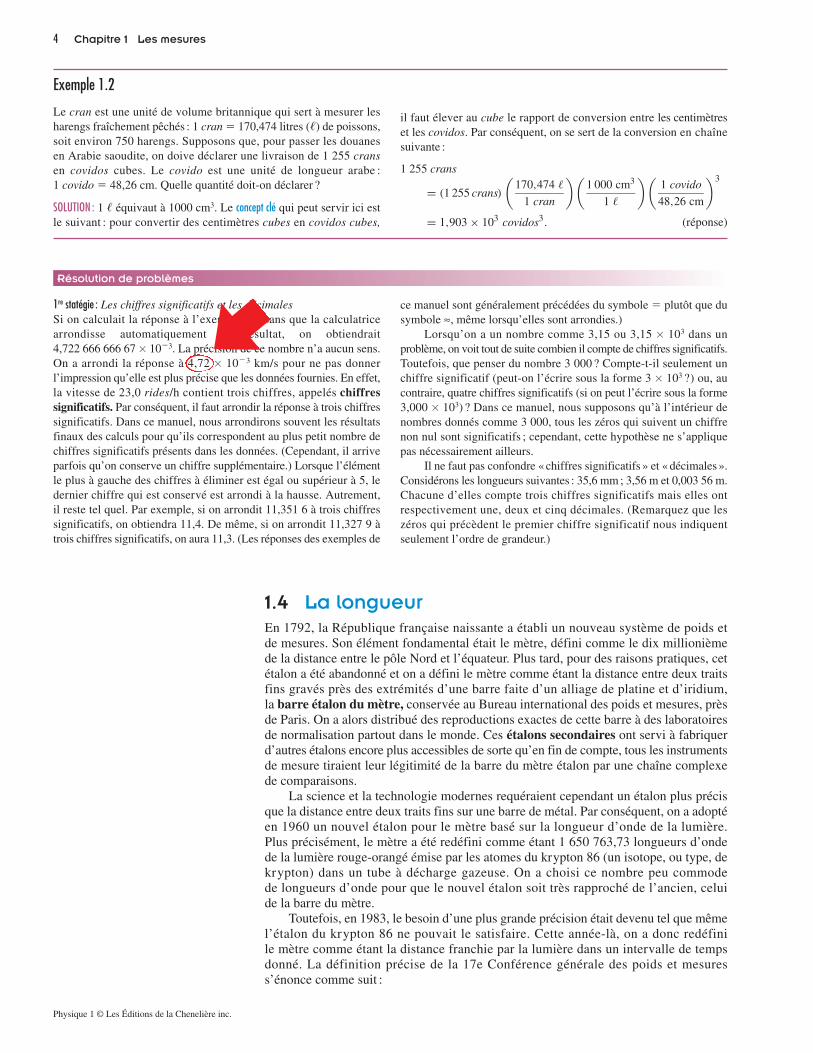
Le cran est une unité de volume britannique qui sert à mesurer lesharengs fraîchement pêchés : 1 cran � 170,474 litres (�) de poissons,soit environ 750 harengs. Supposons que, pour passer les douanes en Arabie saoudite, on doive déclarer une livraison de 1 255 cransen covidos cubes. Le covido est une unité de longueur arabe : 1 covido � 48,26 cm. Quelle quantité doit-on déclarer ?
SOLUTION : 1 � équivaut à 1000 cm3. Le concept clé qui peut servir ici estle suivant : pour convertir des centimètres cubes en covidos cubes,
il faut élever au cube le rapport de conversion entre les centimètres et les covidos. Par conséquent, on se sert de la conversion en chaînesuivante :
1 255 crans
= (1 255 crans)
(170,474 �
1 cran
)(1 000 cm3
1 �
)(1 covido
48,26 cm
)3
= 1,903 × 103 covidos3.
Résolution de problèmes
1re statégie : Les chiffres significatifs et les décimalesSi on calculait la réponse à l’exemple 1.1 sans que la calculatricearrondisse automatiquement le résultat, on obtiendrait 4,722 666 666 67 � 10�3. La précision de ce nombre n’a aucun sens.On a arrondi la réponse à 4,72 � 10�3 km/s pour ne pas donner l’impression qu’elle est plus précise que les données fournies. En effet,la vitesse de 23,0 rides/h contient trois chiffres, appelés chiffressignificatifs. Par conséquent, il faut arrondir la réponse à trois chiffressignificatifs. Dans ce manuel, nous arrondirons souvent les résultatsfinaux des calculs pour qu’ils correspondent au plus petit nombre dechiffres significatifs présents dans les données. (Cependant, il arriveparfois qu’on conserve un chiffre supplémentaire.) Lorsque l’élémentle plus à gauche des chiffres à éliminer est égal ou supérieur à 5, ledernier chiffre qui est conservé est arrondi à la hausse. Autrement, il reste tel quel. Par exemple, si on arrondit 11,351 6 à trois chiffressignificatifs, on obtiendra 11,4. De même, si on arrondit 11,327 9 àtrois chiffres significatifs, on aura 11,3. (Les réponses des exemples de
ce manuel sont généralement précédées du symbole � plutôt que dusymbole ≈, même lorsqu’elles sont arrondies.)
Lorsqu’on a un nombre comme 3,15 ou 3,15 � 103 dans unproblème, on voit tout de suite combien il compte de chiffres significatifs.Toutefois, que penser du nombre 3 000 ? Compte-t-il seulement unchiffre significatif (peut-on l’écrire sous la forme 3 � 103 ?) ou, aucontraire, quatre chiffres significatifs (si on peut l’écrire sous la forme3,000 � 103) ? Dans ce manuel, nous supposons qu’à l’intérieur denombres donnés comme 3 000, tous les zéros qui suivent un chiffrenon nul sont significatifs ; cependant, cette hypothèse ne s’appliquepas nécessairement ailleurs.
Il ne faut pas confondre « chiffres significatifs » et « décimales ».Considérons les longueurs suivantes : 35,6 mm ; 3,56 m et 0,003 56 m.Chacune d’elles compte trois chiffres significatifs mais elles ontrespectivement une, deux et cinq décimales. (Remarquez que leszéros qui précèdent le premier chiffre significatif nous indiquentseulement l’ordre de grandeur.)
(réponse)
Exercices et problèmes 9
5E. La Terre a une forme presque sphérique d’un rayon de 6,37 � 106 m.Quelle est la valeur a) de sa circonférence en kilomètres, b) de sonaire en kilomètres carrés et c) de son volume en kilomètres cubes ?
6E. D’après un vieux manuscrit, un propriétaire de l’époque du roiArthur possédait 3,00 acres de terre cultivée et une terre destinée aubétail de 25,0 perches sur 4,00 perches. Quelle aire totale possédait-ilsi on l’exprime à l’aide a) de l’ancienne unité appelée quart d’arpentet b) de l’unité moderne qu’est le mètre carré ? Dans ce cas, 1 acre a une aire de 40 perches sur 4 perches, 1 quart d’arpent correspond à 40 perches sur 1 perche et 1 perche vaut 16,5 pieds.
(1 mètre � 3,281 pieds)
7P. L’Antarctique a une formepresque semi-circulaire de rayonde 2 000 km (figure 1.5). Sa calottede glace a une épaisseur moyennede 3 000 m. Combien l’Antarctiquecontient-il de centimètres cubesde glace ? (Ne tenez pas compte de la sphéricité de la Terre.)
8P. Certaines maisons de poupées sont construites à une échelle de 1 : 12 par rapport aux vraies maisons. (Autrement dit, chaquelongueur d’une maison de poupées correspond à 1
12 d’une longueurd’une vraie maison.) Le rapport entre une maison miniature (une maisonde poupées qui entre dans la maison de poupées) et une vraie maisonest de 1 : 144. Supposez qu’une vraie maison (figure 1.6) a une façaded’une longueur de 20 m, une profondeur de 12 m et une hauteur de6,0 m. Son toit en pente standard (avec des aires triangulaires verti-cales aux deux extrémités) a une hauteur de 3,0 m. Quels sont, en mètres cubes, les volumes a) de la maison de poupées et b) de la maison miniature correspondantes ?
Figure 1.6 Problème 8
9P. Aux États-Unis, les ingénieurs en hydraulique utilisent encorel’« acre-pied » comme unité de mesure des volumes d’eau. Cette unitéest définie comme le volume d’eau pouvant couvrir une acre de terrainsur une hauteur d’un pied. Un gros orage a déversé 2,00 pouces de pluie en 30,0 minutes sur une ville d’une superficie de 26,0 km2.Quel volume d’eau, en acres-pieds, est tombé sur cette ville ? (1 acre � 43 560 pieds carrés ; 1 pied � 12 pouces ; 1 mètre � 3,281pieds)
SECTION 1.5 Le temps
10E. Le physicien Enrico Fermi a déjà fait remarquer que la duréehabituelle d’un cours (50 min) se rapproche de 1 microsiècle. a) Combien de temps dure un microsiècle en minutes ? b) À l’aide de l’équation suivante :
pourcentage d’écart �
(nombre exact − approximation
nombre exact
)100,
www
déterminez la différence, en pourcentage, entre votre résultat en a) et l’approximation de Fermi.
11E. Exprimez la vitesse de la lumière, 3,00 � 108 m/s, a) en pieds parnanoseconde et b) en millimètres par picoseconde. (1 mètre � 3,281 pieds)
12E. En microphysique, on utilise parfois une unité de temps appeléele shake. Un shake équivaut à 10�8 s. a) Y a-t-il plus de shakes dansune seconde que de secondes dans une année ? b) Les êtres humainssont apparus il y a environ 106 années, alors que l’univers compte à peuprès 1010 années d’existence. Si l’âge actuel de l’univers représente 1« jour-univers », depuis combien de « secondes-univers » les humainsexistent-ils ?
13P. On vérifie l’exactitude de cinq horloges en laboratoire. Quotidien-nement, pendant une semaine, à midi juste au signal horaire de la WWV, on a inscrit l’heure de chaque horloge dans le tableau ci-dessous. Ordonnez les cinq horloges d’après leur exactitude relative,de la meilleure à la pire. Justifiez votre choix.
Horloge DIM LUN MAR MER JEU VEN SAM
A 12:36:40 12:36 :56 12:37:12 12 :37:27 12:37:44 12:37:59 12:38:14
B 11 :59:59 12:00 :02 11:59:57 12 :00:07 12:00:02 11:59:56 12:00:03
C 15 :50:45 15 :51 :43 15:52:41 15:53:39 15:54:37 15:55:35 15:56:33
D 12:03:59 12:02:52 12:01:45 12 :00:38 11:59:31 11:58:24 11:57:17
E 12:03:59 12:02:49 12:01:54 12 :01:52 12:01:32 12:01:22 12:01:12
14P. Trois horloges à affichage numérique, A, B et C, fonctionnent à des rythmes différents et n’atteignent pas zéro en même temps. La figure 1.7 donne des lectures simultanées de paires d’horloges en quatre occasions. (À la première occasion, par exemple, B indique25,0 s et C, 92,0 s.) S’il y a un intervalle de 600 s entre deux événements sur l’horloge A, quel intervalle de temps les sépare sur a) l’horloge B et b) l’horloge C ? c) Lorsque l’horloge A indique 400 s, qu’indique l’horloge B ? d) Lorsque l’horloge C indique 15,0 s,qu’indique l’horloge B ? (Supposez que les instants avant zéro ontdes valeurs négatives.)
Figure 1.7 Problème 14
15P. Une unité astronomique (UA) correspond à la distance moyennede la Terre au Soleil, soit approximativement 1,50 � 108 km. La vitesse de la lumière est d’environ 3,00 � 108 m/s. Exprimez la vitesse de la lumière en unités astronomiques par minute.
16P. Jusqu’en 1883, chaque grande ou petite ville américaine avaitson heure locale. De nos jours, les voyageurs remettent leur montre à l’heure uniquement lorsque le décalage horaire est d’une heurecomplète (1,0 h). En moyenne, combien de degrés de longitude doit-on franchir avant de remettre sa montre à l’heure? (Indice: la Terreaccomplit une rotation de 360° en approximativement 24 h.)
17P. En supposant que la longueur des jours augmente de façon régulièrede 0,001 00 s par siècle, calculez l’effet cumulatif de cette augmentationsur la mesure du temps en 20 siècles. (Le ralentissement de la rotationde la Terre a été constaté grâce à des observations d’éclipses solairespendant cette période.)
18P. Les étalons de temps sont maintenant basés sur des horlogesatomiques. Un deuxième étalon très prometteur est basé sur les pulsars,des étoiles à neutrons en rotation. (Il s’agit, en fait, d’étoiles trèscompactes, entièrement constituées de neutrons.) Certaines de ces
www
Physique 1 © Les Éditions de la Chenelière inc.
3 000 m2 000 km
Figure 1.5 Problème 7
6,0 m
12 m
20 m
3,0 m
A (s)
B (s)
C (s)
312 512
29020012525,0
92,0 142
Physique 1 © Les Éditions de la Chenelière inc.
34 Chapitre 3 Le mouvement rectiligne
VÉRIFIEZ VOS CONNAISSANCES 3 : Les équations suivantes donnent la position x(t) d’une par-ticule pour quatre situations. (Dans chaque équation, x est exprimé en mètres et t, en secondes.De plus, t > 0.) 1) x � 3t � 2 ; 2) x � �4t2 � 2 ; 3) x � 2/t2 ; et 4) x � �2. a) Dans laquelle ou lesquelles de ces situations la vitesse vx de la particule est-elle constante ? b) Dans laquelleou lesquelles de ces situations vx est-il, pour tout temps t, négatif ?
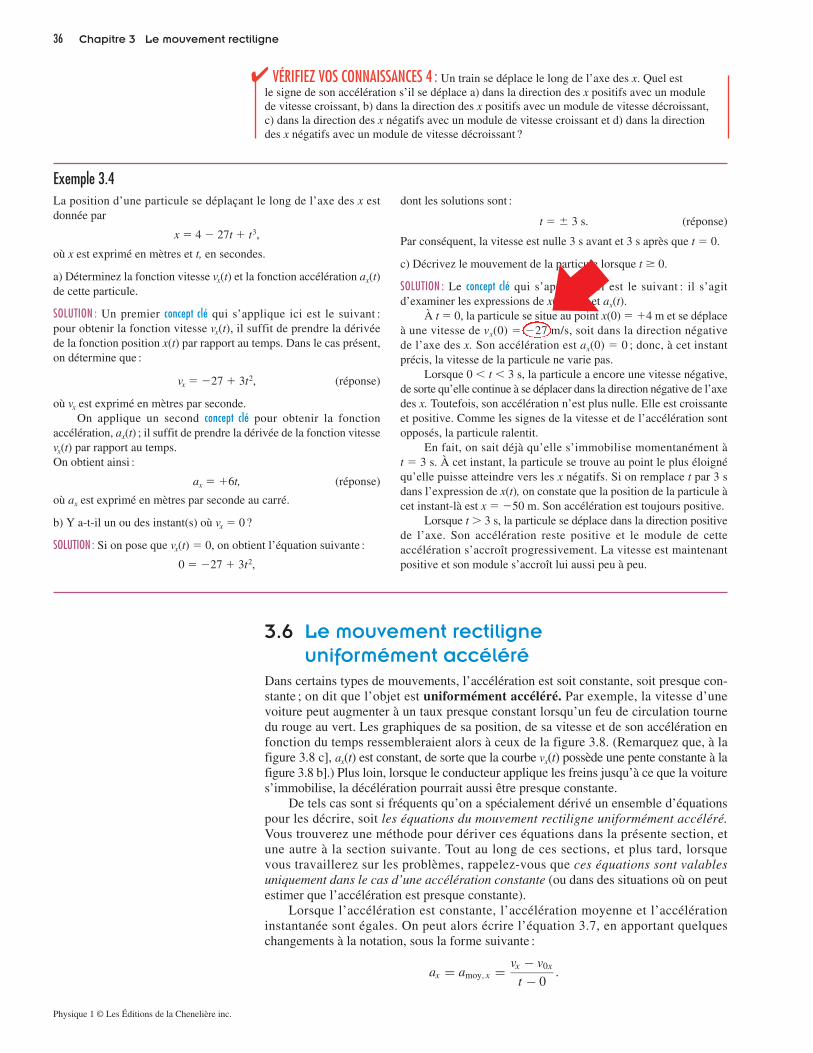
3.5 L’accélérationLorsque la vitesse d’une particule varie, on dit que cette particule est soumise à uneaccélération ou qu’elle accélère. Dans le cas d’un mouvement s’effectuant le long del’axe des x, la composante x de l’accélération moyenne, amoy, x, pendant un intervalle de temps �t est définie par :
amoy,x = vfx − vix
tf − ti= �vx
�t, (3.7)
où la particule a une vitesse initiale vix au temps ti et une vitesse finale vfx au temps tf.L’accélération instantanée ax (ou, simplement, l’accélération) est obtenue à partir de l’accélération moyenne amoy, x en réduisant l’intervalle de temps �t pour le rapprocher de plus en plus de zéro. À mesure que �t diminue, l’accélération moyenne tend vers une valeur limite qui correspond à l’accélération à l’instant choisi. L’accélération ax estdonc la dérivée de la vitesse par rapport au temps.
ax = lim�t→0
�vx
�t= dvx
dt. (3.8)
Autrement dit, l’accélération d’une particule à n’importe quel instant correspond au tauxde variation de sa vitesse à l’instant choisi. Graphiquement, l’accélération à n’importequel temps est égale à la pente de la tangente à la courbe de vx(t) au temps choisi.
On peut combiner l’équation 3.8 et l’équation 3.4 pour obtenir ce qui suit :
ax = dvx
dt= d
dt
(dx
dt
)= d2x
dt2. (3.9)
Sous forme verbale, la fonction accélération ax(t) d’une particule est la dérivée secondede sa fonction position x(t) par rapport au temps.
Le mètre par seconde par seconde, m/(s • s) ou m/s2, est l’unité courante de l’accélération. D’autres unités apparaîtront dans les problèmes, mais elles auront toujoursla forme « longueur/(temps • temps) » ou « longueur/temps2». L’accélération possède un module et une direction (elle est donc une autre quantité vectorielle). Son signealgébrique indique sa direction par rapport à l’axe, exactement comme pour le déplacementet la vitesse. Autrement dit, l’accélération qui a une valeur positive est orientée dans la direc-tion positive d’un axe, et une accélération négative est orientée dans sa direction négative.
La figure 3.6 c) présente le graphique de l’accélération de l’ascenseur dont il a étéquestion dans l’exemple 3.2. En comparant cette courbe ax(t) à la courbe vx(t), on constateque chaque point de la courbe ax(t) est la dérivée (la pente de la tangente) de la courbevx(t) au temps correspondant. Lorsque vx est constant (soit à 0 et à 4 m/s), la dérivée est nulle et, par conséquent, l’accélération aussi. Lorsque l’ascenseur commence à se déplacer, la courbe vx(t) a une dérivée positive (la pente de la tangente est positive),ce qui signifie que ax(t) est positif. Lorsqu’il ralentit avant de s’arrêter, la dérivée et la pente de la tangente de la courbe vx(t) sont négatives, et ax(t) est négatif.
On peut maintenant comparer les pentes de la courbe vx(t) au cours des deux périodesd’accélération non nulle. La pente associée à la portion de la courbe où l’ascenseur ralentit(un mouvement couramment appelé « décélération ») est plus forte, en valeur absolue,parce que l’ascenseur s’arrête en moitié moins de temps qu’il met à atteindre sa vitesse maximale lors du début du mouvement. La forte pente, en valeur absolue, indique que le module de la décélération est supérieur à celui de l’accélération, comme lemontre la figure 3.6 c).
Les sensations qu’on éprouverait dans l’ascenseur de la figure 3.6 sont indiquéespar les bonshommes dessinés au bas des graphiques. Lorsque la vitesse de l’ascenseuraugmente (phase d’accélération), le passager a l’impression de subir une pression vers le bas.Un peu plus tard, lorsque l’ascenseur ralentit pour s’immobiliser (phase de décélération),
✔
Physique 1 © Les Éditions de la Chenelière inc.
36 Chapitre 3 Le mouvement rectiligne
3.6 Le mouvement rectiligne uniformément accéléré
Dans certains types de mouvements, l’accélération est soit constante, soit presque con-stante ; on dit que l’objet est uniformément accéléré. Par exemple, la vitesse d’unevoiture peut augmenter à un taux presque constant lorsqu’un feu de circulation tournedu rouge au vert. Les graphiques de sa position, de sa vitesse et de son accélération enfonction du temps ressembleraient alors à ceux de la figure 3.8. (Remarquez que, à lafigure 3.8 c], ax(t) est constant, de sorte que la courbe vx(t) possède une pente constante à lafigure 3.8 b].) Plus loin, lorsque le conducteur applique les freins jusqu’à ce que la voitures’immobilise, la décélération pourrait aussi être presque constante.
De tels cas sont si fréquents qu’on a spécialement dérivé un ensemble d’équationspour les décrire, soit les équations du mouvement rectiligne uniformément accéléré.Vous trouverez une méthode pour dériver ces équations dans la présente section, et une autre à la section suivante. Tout au long de ces sections, et plus tard, lorsque vous travaillerez sur les problèmes, rappelez-vous que ces équations sont valablesuniquement dans le cas d’une accélération constante (ou dans des situations où on peutestimer que l’accélération est presque constante).
Lorsque l’accélération est constante, l’accélération moyenne et l’accélérationinstantanée sont égales. On peut alors écrire l’équation 3.7, en apportant quelqueschangements à la notation, sous la forme suivante :
ax = amoy,x = vx − v0x
t − 0.
dont les solutions sont :
t � � 3 s. (réponse)
Par conséquent, la vitesse est nulle 3 s avant et 3 s après que t � 0.
c) Décrivez le mouvement de la particule lorsque t � 0.
SOLUTION : Le concept clé qui s’applique ici est le suivant : il s’agit d’examiner les expressions de x(t), vx(t) et ax(t).
À t � 0, la particule se situe au point x(0) � �4 m et se déplaceà une vitesse de vx(0) � �27 m/s, soit dans la direction négative de l’axe des x. Son accélération est ax(0) � 0 ; donc, à cet instantprécis, la vitesse de la particule ne varie pas.
Lorsque 0 � t � 3 s, la particule a encore une vitesse négative,de sorte qu’elle continue à se déplacer dans la direction négative de l’axedes x. Toutefois, son accélération n’est plus nulle. Elle est croissanteet positive. Comme les signes de la vitesse et de l’accélération sontopposés, la particule ralentit.
En fait, on sait déjà qu’elle s’immobilise momentanément à t � 3 s. À cet instant, la particule se trouve au point le plus éloignéqu’elle puisse atteindre vers les x négatifs. Si on remplace t par 3 sdans l’expression de x(t), on constate que la position de la particule àcet instant-là est x � �50 m. Son accélération est toujours positive.
Lorsque t � 3 s, la particule se déplace dans la direction positivede l’axe. Son accélération reste positive et le module de cetteaccélération s’accroît progressivement. La vitesse est maintenantpositive et son module s’accroît lui aussi peu à peu.
La position d’une particule se déplaçant le long de l’axe des x estdonnée par
x � 4 � 27t � t3,
où x est exprimé en mètres et t, en secondes.
a) Déterminez la fonction vitesse vx(t) et la fonction accélération ax(t)de cette particule.
SOLUTION : Un premier concept clé qui s’applique ici est le suivant : pour obtenir la fonction vitesse vx(t), il suffit de prendre la dérivée de la fonction position x(t) par rapport au temps. Dans le cas présent,on détermine que :
vx � �27 � 3t2, (réponse)
où vx est exprimé en mètres par seconde.On applique un second concept clé pour obtenir la fonction
accélération, ax(t) ; il suffit de prendre la dérivée de la fonction vitessevx(t) par rapport au temps.On obtient ainsi :
ax � �6t, (réponse)
où ax est exprimé en mètres par seconde au carré.
b) Y a-t-il un ou des instant(s) où vx � 0 ?
SOLUTION : Si on pose que vx(t) � 0, on obtient l’équation suivante :
0 � �27 � 3t2,
Exemple 3.4
✔ VÉRIFIEZ VOS CONNAISSANCES 4 : Un train se déplace le long de l’axe des x. Quel est le signe de son accélération s’il se déplace a) dans la direction des x positifs avec un module de vitesse croissant, b) dans la direction des x positifs avec un module de vitesse décroissant, c) dans la direction des x négatifs avec un module de vitesse croissant et d) dans la directiondes x négatifs avec un module de vitesse décroissant ?
Physique 1 © Les Éditions de la Chenelière inc.
38 Chapitre 3 Le mouvement rectiligne
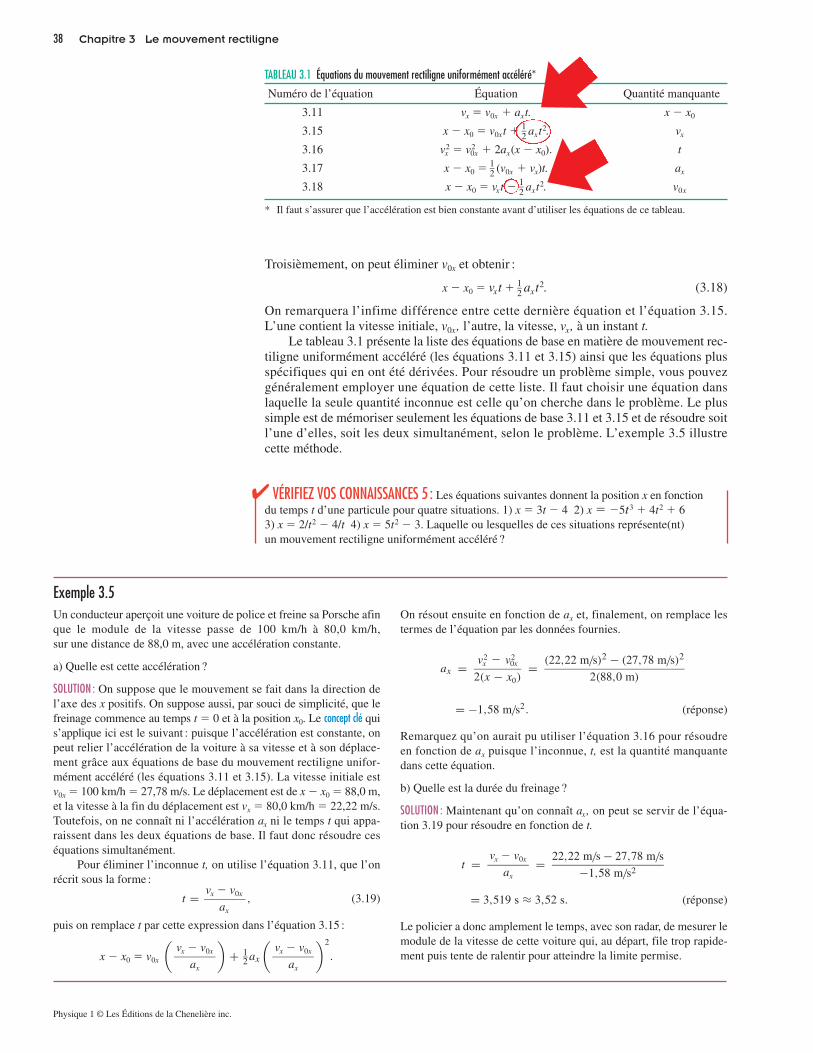
TABLEAU 3.1 Équations du mouvement rectiligne uniformément accéléré*
Numéro de l’équation Équation Quantité manquante
3.11 vx � v0x � axt. x � x0
3.15 x � x0 � v0xt � 12 axt2. vx
3.16 vx2 � v2
0x � 2ax(x � x0). t
3.17 x � x0 � 12 (v0x � vx)t. ax
3.18 x � x0 � vxt � 12 axt2. v0x
* Il faut s’assurer que l’accélération est bien constante avant d’utiliser les équations de ce tableau.
Troisièmement, on peut éliminer v0x et obtenir :
x � x0 � vxt � 12 axt2. (3.18)
On remarquera l’infime différence entre cette dernière équation et l’équation 3.15.L’une contient la vitesse initiale, v0x, l’autre, la vitesse, vx, à un instant t.
Le tableau 3.1 présente la liste des équations de base en matière de mouvement rec-tiligne uniformément accéléré (les équations 3.11 et 3.15) ainsi que les équations plusspécifiques qui en ont été dérivées. Pour résoudre un problème simple, vous pouvezgénéralement employer une équation de cette liste. Il faut choisir une équation danslaquelle la seule quantité inconnue est celle qu’on cherche dans le problème. Le plussimple est de mémoriser seulement les équations de base 3.11 et 3.15 et de résoudre soitl’une d’elles, soit les deux simultanément, selon le problème. L’exemple 3.5 illustrecette méthode.
VÉRIFIEZ VOS CONNAISSANCES 5 : Les équations suivantes donnent la position x en fonctiondu temps t d’une particule pour quatre situations. 1) x � 3t � 4 2) x � �5t3 � 4t2 � 63) x � 2/t2 � 4/t 4) x � 5t2 � 3. Laquelle ou lesquelles de ces situations représente(nt) un mouvement rectiligne uniformément accéléré ?
On résout ensuite en fonction de ax et, finalement, on remplace lestermes de l’équation par les données fournies.
ax = vx2 − v0x
2
2(x − x0)= (22,22 m/s)2 − (27,78 m/s)2
2(88,0 m)
= −1,58 m/s2. (réponse)
Remarquez qu’on aurait pu utiliser l’équation 3.16 pour résoudre en fonction de ax puisque l’inconnue, t, est la quantité manquantedans cette équation.
b) Quelle est la durée du freinage ?
SOLUTION : Maintenant qu’on connaît ax, on peut se servir de l’équa-tion 3.19 pour résoudre en fonction de t.
t = vx − v0x
ax= 22,22 m/s − 27,78 m/s
−1,58 m/s2
= 3,519 s ≈ 3,52 s. (réponse)
Le policier a donc amplement le temps, avec son radar, de mesurer lemodule de la vitesse de cette voiture qui, au départ, file trop rapide-ment puis tente de ralentir pour atteindre la limite permise.
Un conducteur aperçoit une voiture de police et freine sa Porsche afinque le module de la vitesse passe de 100 km/h à 80,0 km/h, sur une distance de 88,0 m, avec une accélération constante.
a) Quelle est cette accélération ?
SOLUTION : On suppose que le mouvement se fait dans la direction del’axe des x positifs. On suppose aussi, par souci de simplicité, que lefreinage commence au temps t � 0 et à la position x0. Le concept clé quis’applique ici est le suivant : puisque l’accélération est constante, onpeut relier l’accélération de la voiture à sa vitesse et à son déplace-ment grâce aux équations de base du mouvement rectiligne unifor-mément accéléré (les équations 3.11 et 3.15). La vitesse initiale est v0x � 100 km/h � 27,78 m/s. Le déplacement est de x � x0 � 88,0 m,et la vitesse à la fin du déplacement est vx � 80,0 km/h � 22,22 m/s.Toutefois, on ne connaît ni l’accélération ax ni le temps t qui appa-raissent dans les deux équations de base. Il faut donc résoudre ceséquations simultanément.
Pour éliminer l’inconnue t, on utilise l’équation 3.11, que l’onrécrit sous la forme :
t = vx − v0x
ax, (3.19)
puis on remplace t par cette expression dans l’équation 3.15 :
x � x0 � v0x
(vx − v0x
ax
)+ 1
2 ax
(vx − v0x
ax
)2
.
Exemple 3.5
✔
v2x � v2
0x
x0
2
2
2
vx � v0x
ax
vx � v0x
ax
vx � v0x
ax
vx � v0x
ax

Physique 1 © Les Éditions de la Chenelière inc.
68 Chapitre 4 Le mouvement à deux et à trois dimensions
1. La figure 4.26 montre la position initiale i et la position finale fd’une particule. Quels sont, exprimés à l’aide des vecteurs unitaires,a) le vecteur position initiale �ri et b) le vecteur position finale �rf
de la particule ? c) Quelle est la composante x du déplacement ��rde la particule ?
Figure 4.26 Question 1
2. Voici quatre descriptions de la vitesse d’une rondelle de hockeydans le plan des xy, en mètres par seconde.
1) vx � �3t2 � 4t � 2 et vy � 6t � 4
2) vx � � 3 et vy � �5t2 � 6
3) �v � 2t2�i � (4t � 3)�j4) �v � 2t�i � 3�ja) Dans chaque cas, déterminez si les composantes x et y de l’accélérationsont constantes et si le vecteur accélération �a est constant. b) Dans ladescription 4), si �v est en mètres par seconde et t en secondes, quellesdoivent être les unités des coefficients 2 et 3 ?
3. La figure 4.27 montre trois situations où des projectiles identiquessont lancés à partir du sol (c’est-à-dire au même niveau) à des vitessesinitiales identiques. Toutefois, ils n’atterrissent pas sur le même terrain.Classez ces situations selon les modules des vitesses finales des pro-jectiles juste avant qu’ils atterrissent, en commençant par le plusélevé.
QUESTIONS
En utilisant la notation des vecteurs unitaires, on a
�a � ax�i � ay
�j � az�k (4.17)
où ax � dvx /dt, ay � dvy /dt et az � dvz /dt.
Le mouvement d’un projectile Le mouvement d’un projectile estle mouvement d’une particule qui est projetée à une vitesse initiale �v0
et qui ne subit que l’influence de la gravité. Au cours de son mouve-ment, la particule a une accélération horizontale nulle et son accélérationverticale est l’accélération gravitationnelle ay � �g. (La direction versle haut est considérée comme celle de l’axe des y positifs.) Lorsque�v0 est exprimé sous forme d’un module (v0) et d’un angle (�0 par rap-port à l’axe des x positifs), les équations du mouvement de la par-ticule le long de l’axe horizontal des x et de l’axe vertical des y sont
x � x0 � (v0 cos �0)t (4.25)
y � y0 � (v0 sin �0)t � 12gt 2 (4.26)
vy � v0 sin �0 � gt (4.27)
vy2 � (v0 sin �0)2 � 2g(y � y0). (4.28)
Dans le mouvement d’un projectile, la trajectoire d’une particule estparabolique et est exprimée par
y = y0 + (tan θ0)x − gx2
2(v0 cos θ0)2 , (4.29)
où l’origine est choisie de telle manière que x0 dans l’équation 4.25est nul. La portée horizontale de la particule, R, qui est la distancehorizontale entre le point de lancement et le point où la particulerevient à sa hauteur initiale, est exprimée par
R = v20
gsin (2θ0). (4.30)
Le mouvement circulaire uniforme Lorsqu’une particule se déplace le long d’un cercle ou d’un arc de cercle de rayon r, à une vitesse de module constant v, elle est animée d’un mouvementcirculaire uniforme et son accélération �a a un module de
ac = v2
r. (4.36)
L’accélération �a est orientée vers le centre du cercle ou de l’arc de cercle. On dit alors qu’elle est centripète. Le temps que met la particule à faire un tour complet du cercle est exprimé par
T = 2πr
v. (4.37)
Le facteur T porte le nom de « période de révolution » (ou, simplement,de « période ») du mouvement.
Le mouvement circulaire non uniforme Lorsqu’une par-ticule se déplace le long d’un cercle ou d’un arc de cercle de rayon r,avec une vitesse dont le module est variable, elle est animée d’unmouvement circulaire non uniforme et son accélération comporte, enplus d’une composante radiale (ou centripète), une composante tan-gentielle égale au taux de variation du module de la vitesse. Ainsi,
�a = aθ�uθ + ar�ur = dv
dt�uθ − v2
r�ur . (4.45)
L’accélération radiale ou centripète est orientée vers le centre ducercle ou de l’arc de cercle et décrit la variation de l’orientation de la vitesse. L’accélération tangentielle en un point est dans la directiontangente à la trajectoire de la particule et elle décrit la variation dumodule de la vitesse. Elle est orientée dans le même sens que lavitesse si le module de la vitesse augmente et dans le sens contrairesi son module diminue.
Le mouvement relatif Lorsque deux systèmes de référence Aet B se déplacent l’un par rapport à l’autre à une vitesse constante, la vitesse d’une particule P telle qu’elle est mesurée par un observateurqui se trouve dans le référentiel A diffère généralement de celle quiest mesurée par un observateur qui se trouve dans le référentiel B.La relation entre ces deux mesures est la suivante :
�vPA � �vPB � �vBA , (4.50)
où �vBA représente la vitesse de B par rapport à A. Toutefois, les deuxobservateurs obtiendront la même mesure quant à l’accélération de laparticule si �vBA est constant, c’est-à-dire que
�aPA � �aPB. (4.51)
z
x
i
f
y
4 m4 m
1 m
2 m3 m
3 m
3 m 5 m
Physique 1 © Les Éditions de la Chenelière inc.
Exercices et problèmes 141
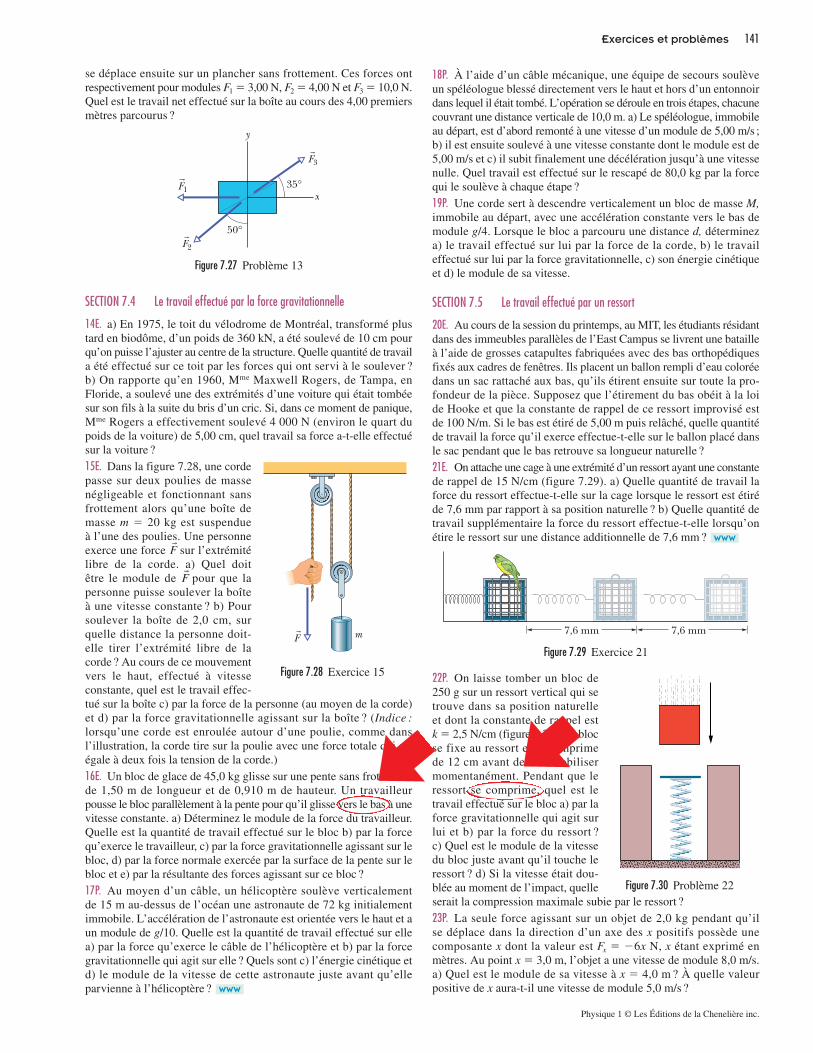
se déplace ensuite sur un plancher sans frottement. Ces forces ontrespectivement pour modules F1 � 3,00 N, F2 � 4,00 N et F3 � 10,0 N.Quel est le travail net effectué sur la boîte au cours des 4,00 premiersmètres parcourus ?
SECTION 7.4 Le travail effectué par la force gravitationnelle
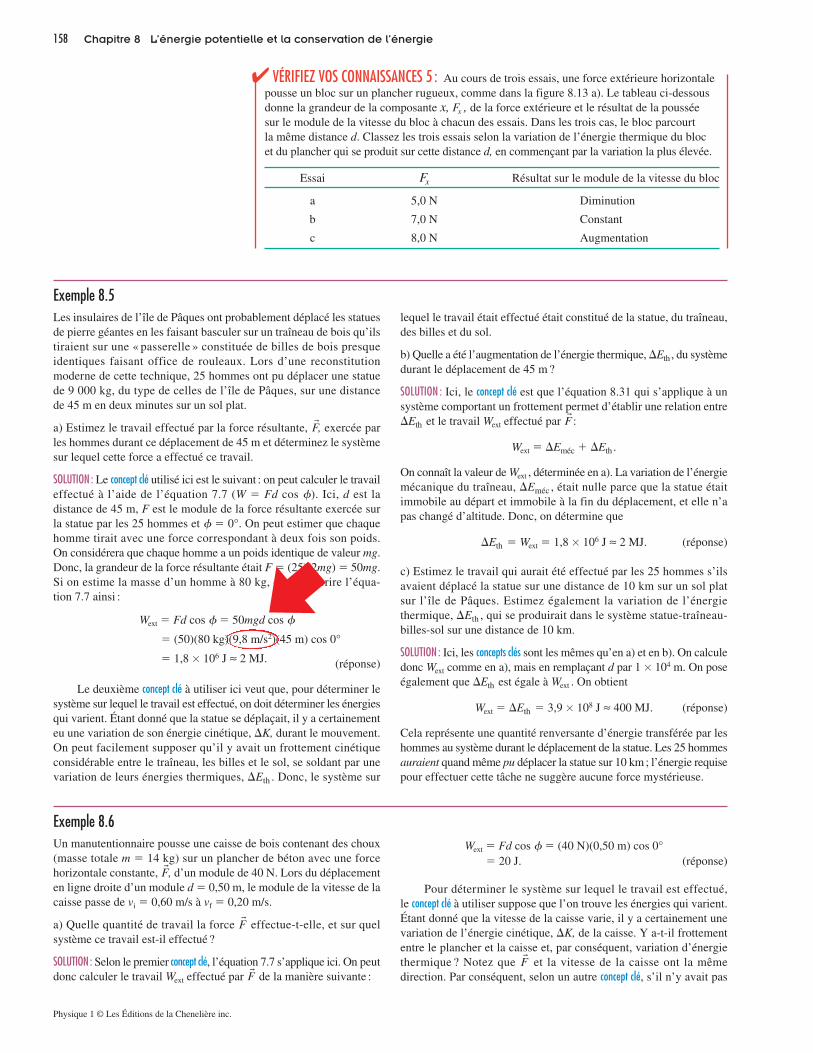
14E. a) En 1975, le toit du vélodrome de Montréal, transformé plustard en biodôme, d’un poids de 360 kN, a été soulevé de 10 cm pourqu’on puisse l’ajuster au centre de la structure. Quelle quantité de travaila été effectué sur ce toit par les forces qui ont servi à le soulever ? b) On rapporte qu’en 1960, Mme Maxwell Rogers, de Tampa, enFloride, a soulevé une des extrémités d’une voiture qui était tombéesur son fils à la suite du bris d’un cric. Si, dans ce moment de panique,Mme Rogers a effectivement soulevé 4 000 N (environ le quart dupoids de la voiture) de 5,00 cm, quel travail sa force a-t-elle effectuésur la voiture ?15E. Dans la figure 7.28, une cordepasse sur deux poulies de massenégligeable et fonctionnant sansfrottement alors qu’une boîte demasse m � 20 kg est suspendue à l’une des poulies. Une personneexerce une force �F sur l’extrémitélibre de la corde. a) Quel doit être le module de �F pour que lapersonne puisse soulever la boîte à une vitesse constante ? b) Poursoulever la boîte de 2,0 cm, surquelle distance la personne doit-elle tirer l’extrémité libre de lacorde ? Au cours de ce mouvementvers le haut, effectué à vitesse constante, quel est le travail effec-tué sur la boîte c) par la force de la personne (au moyen de la corde)et d) par la force gravitationnelle agissant sur la boîte ? (Indice :lorsqu’une corde est enroulée autour d’une poulie, comme dans l’illustration, la corde tire sur la poulie avec une force totale qui estégale à deux fois la tension de la corde.)16E. Un bloc de glace de 45,0 kg glisse sur une pente sans frottementde 1,50 m de longueur et de 0,910 m de hauteur. Un travailleurpousse le bloc parallèlement à la pente pour qu’il glisse vers le bas à unevitesse constante. a) Déterminez le module de la force du travailleur.Quelle est la quantité de travail effectué sur le bloc b) par la forcequ’exerce le travailleur, c) par la force gravitationnelle agissant sur lebloc, d) par la force normale exercée par la surface de la pente sur lebloc et e) par la résultante des forces agissant sur ce bloc ?17P. Au moyen d’un câble, un hélicoptère soulève verticalement de 15 m au-dessus de l’océan une astronaute de 72 kg initialementimmobile. L’accélération de l’astronaute est orientée vers le haut et aun module de g/10. Quelle est la quantité de travail effectué sur ellea) par la force qu’exerce le câble de l’hélicoptère et b) par la forcegravitationnelle qui agit sur elle ? Quels sont c) l’énergie cinétique etd) le module de la vitesse de cette astronaute juste avant qu’elleparvienne à l’hélicoptère ? www
18P. À l’aide d’un câble mécanique, une équipe de secours soulèveun spéléologue blessé directement vers le haut et hors d’un entonnoirdans lequel il était tombé. L’opération se déroule en trois étapes, chacunecouvrant une distance verticale de 10,0 m. a) Le spéléologue, immobileau départ, est d’abord remonté à une vitesse d’un module de 5,00 m/s ;b) il est ensuite soulevé à une vitesse constante dont le module est de5,00 m/s et c) il subit finalement une décélération jusqu’à une vitessenulle. Quel travail est effectué sur le rescapé de 80,0 kg par la forcequi le soulève à chaque étape ?19P. Une corde sert à descendre verticalement un bloc de masse M,immobile au départ, avec une accélération constante vers le bas demodule g/4. Lorsque le bloc a parcouru une distance d, déterminez a) le travail effectué sur lui par la force de la corde, b) le travaileffectué sur lui par la force gravitationnelle, c) son énergie cinétiqueet d) le module de sa vitesse.
SECTION 7.5 Le travail effectué par un ressort
20E. Au cours de la session du printemps, au MIT, les étudiants résidantdans des immeubles parallèles de l’East Campus se livrent une batailleà l’aide de grosses catapultes fabriquées avec des bas orthopédiquesfixés aux cadres de fenêtres. Ils placent un ballon rempli d’eau coloréedans un sac rattaché aux bas, qu’ils étirent ensuite sur toute la pro-fondeur de la pièce. Supposez que l’étirement du bas obéit à la loi de Hooke et que la constante de rappel de ce ressort improvisé est de 100 N/m. Si le bas est étiré de 5,00 m puis relâché, quelle quantitéde travail la force qu’il exerce effectue-t-elle sur le ballon placé dansle sac pendant que le bas retrouve sa longueur naturelle ?21E. On attache une cage à une extrémité d’un ressort ayant une constantede rappel de 15 N/cm (figure 7.29). a) Quelle quantité de travail laforce du ressort effectue-t-elle sur la cage lorsque le ressort est étiréde 7,6 mm par rapport à sa position naturelle ? b) Quelle quantité detravail supplémentaire la force du ressort effectue-t-elle lorsqu’onétire le ressort sur une distance additionnelle de 7,6 mm ?
Figure 7.29 Exercice 21
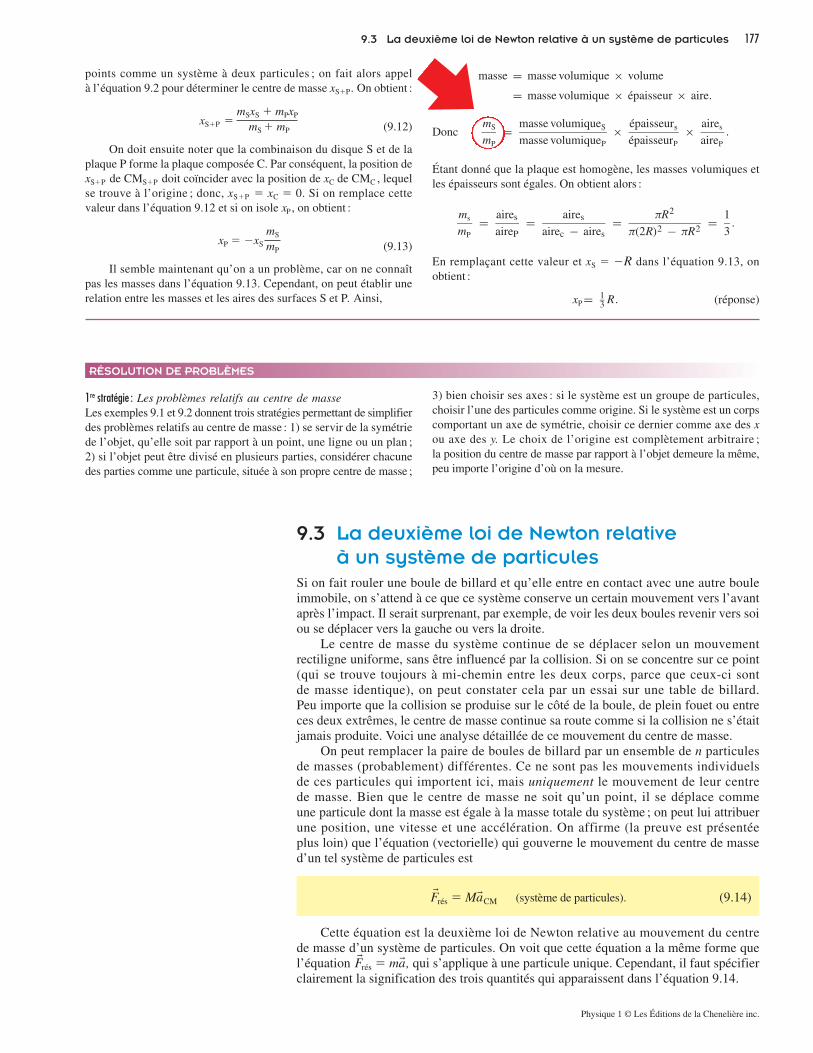
22P. On laisse tomber un bloc de250 g sur un ressort vertical qui setrouve dans sa position naturelle et dont la constante de rappel est k � 2,5 N/cm (figure 7.30). Le blocse fixe au ressort et le comprime de 12 cm avant de s’immobilisermomentanément. Pendant que leressort se comprime, quel est letravail effectué sur le bloc a) par laforce gravitationnelle qui agit surlui et b) par la force du ressort ? c) Quel est le module de la vitessedu bloc juste avant qu’il touche leressort ? d) Si la vitesse était dou-blée au moment de l’impact, quelleserait la compression maximale subie par le ressort ?23P. La seule force agissant sur un objet de 2,0 kg pendant qu’il se déplace dans la direction d’un axe des x positifs possède une composante x dont la valeur est Fx � �6x N, x étant exprimé enmètres. Au point x � 3,0 m, l’objet a une vitesse de module 8,0 m/s.a) Quel est le module de sa vitesse à x � 4,0 m ? À quelle valeur positive de x aura-t-il une vitesse de module 5,0 m/s ?
www
F1
F2
F3
y
x
50°
35°
Figure 7.27 Problème 13
mF
Figure 7.28 Exercice 15
7,6 mm 7,6 mm
���Figure 7.30 Problème 22
158 Chapitre 8 L’énergie potentielle et la conservation de l’énergie
Un manutentionnaire pousse une caisse de bois contenant des choux(masse totale m � 14 kg) sur un plancher de béton avec une forcehorizontale constante, �F, d’un module de 40 N. Lors du déplacementen ligne droite d’un module d � 0,50 m, le module de la vitesse de lacaisse passe de vi � 0,60 m/s à vf � 0,20 m/s.
a) Quelle quantité de travail la force �F effectue-t-elle, et sur quel système ce travail est-il effectué ?
SOLUTION: Selon le premier concept clé, l’équation 7.7 s’applique ici. On peutdonc calculer le travail Wext effectué par �F de la manière suivante :
Wext � Fd cos � � (40 N)(0,50 m) cos 0°� 20 J. (réponse)
Pour déterminer le système sur lequel le travail est effectué, le concept clé à utiliser suppose que l’on trouve les énergies qui varient.Étant donné que la vitesse de la caisse varie, il y a certainement unevariation de l’énergie cinétique, �K, de la caisse. Y a-t-il frottemententre le plancher et la caisse et, par conséquent, variation d’énergiethermique ? Notez que �F et la vitesse de la caisse ont la même direction. Par conséquent, selon un autre concept clé, s’il n’y avait pas
VÉRIFIEZ VOS CONNAISSANCES 5 : Au cours de trois essais, une force extérieure horizontalepousse un bloc sur un plancher rugueux, comme dans la figure 8.13 a). Le tableau ci-dessousdonne la grandeur de la composante x, Fx , de la force extérieure et le résultat de la poussée sur le module de la vitesse du bloc à chacun des essais. Dans les trois cas, le bloc parcourt la même distance d. Classez les trois essais selon la variation de l’énergie thermique du bloc et du plancher qui se produit sur cette distance d, en commençant par la variation la plus élevée.
Essai Fx Résultat sur le module de la vitesse du bloc
a 5,0 N Diminution
b 7,0 N Constant
c 8,0 N Augmentation
Physique 1 © Les Éditions de la Chenelière inc.
Exemple 8.6
Les insulaires de l’île de Pâques ont probablement déplacé les statuesde pierre géantes en les faisant basculer sur un traîneau de bois qu’ilstiraient sur une « passerelle » constituée de billes de bois presqueidentiques faisant office de rouleaux. Lors d’une reconstitution moderne de cette technique, 25 hommes ont pu déplacer une statuede 9 000 kg, du type de celles de l’île de Pâques, sur une distance de 45 m en deux minutes sur un sol plat.
a) Estimez le travail effectué par la force résultante, �F, exercée parles hommes durant ce déplacement de 45 m et déterminez le systèmesur lequel cette force a effectué ce travail.
SOLUTION : Le concept clé utilisé ici est le suivant : on peut calculer le travaileffectué à l’aide de l’équation 7.7 (W � Fd cos �). Ici, d est la distance de 45 m, F est le module de la force résultante exercée sur la statue par les 25 hommes et � � 0°. On peut estimer que chaquehomme tirait avec une force correspondant à deux fois son poids. On considérera que chaque homme a un poids identique de valeur mg.Donc, la grandeur de la force résultante était F � (25)(2mg) � 50mg.Si on estime la masse d’un homme à 80 kg, on peut écrire l’équa-tion 7.7 ainsi :
Wext � Fd cos � � 50mgd cos �
� (50)(80 kg)(9,8 m/s2)(45 m) cos 0°
� 1,8 � 106 J ≈ 2 MJ. (réponse)
Le deuxième concept clé à utiliser ici veut que, pour déterminer lesystème sur lequel le travail est effectué, on doit déterminer les énergiesqui varient. Étant donné que la statue se déplaçait, il y a certainementeu une variation de son énergie cinétique, �K, durant le mouvement. On peut facilement supposer qu’il y avait un frottement cinétiqueconsidérable entre le traîneau, les billes et le sol, se soldant par unevariation de leurs énergies thermiques, �Eth . Donc, le système sur
lequel le travail était effectué était constitué de la statue, du traîneau,des billes et du sol.
b) Quelle a été l’augmentation de l’énergie thermique, �Eth , du systèmedurant le déplacement de 45 m ?
SOLUTION : Ici, le concept clé est que l’équation 8.31 qui s’applique à unsystème comportant un frottement permet d’établir une relation entre�Eth et le travail Wext effectué par �F :
Wext � �Eméc � �Eth .
On connaît la valeur de Wext , déterminée en a). La variation de l’énergiemécanique du traîneau, �Eméc , était nulle parce que la statue étaitimmobile au départ et immobile à la fin du déplacement, et elle n’apas changé d’altitude. Donc, on détermine que
�Eth � Wext � 1,8 � 106 J ≈ 2 MJ. (réponse)
c) Estimez le travail qui aurait été effectué par les 25 hommes s’ilsavaient déplacé la statue sur une distance de 10 km sur un sol plat sur l’île de Pâques. Estimez également la variation de l’énergie thermique, �Eth , qui se produirait dans le système statue-traîneau-billes-sol sur une distance de 10 km.
SOLUTION : Ici, les concepts clés sont les mêmes qu’en a) et en b). On calculedonc Wext comme en a), mais en remplaçant d par 1 � 104 m. On poseégalement que �Eth est égale à Wext . On obtient
Wext � �Eth � 3,9 � 108 J ≈ 400 MJ. (réponse)
Cela représente une quantité renversante d’énergie transférée par leshommes au système durant le déplacement de la statue. Les 25 hommesauraient quand même pu déplacer la statue sur 10 km; l’énergie requisepour effectuer cette tâche ne suggère aucune force mystérieuse.
Exemple 8.5
✔
Physique 1 © Les Éditions de la Chenelière inc.
9.3 La deuxième loi de Newton relative à un système de particules 177
points comme un système à deux particules ; on fait alors appel à l’équation 9.2 pour déterminer le centre de masse xS�P . On obtient :
xS�P �mSxS � mPxP
mS � mP (9.12)
On doit ensuite noter que la combinaison du disque S et de laplaque P forme la plaque composée C. Par conséquent, la position dexS�P de CMS�P doit coïncider avec la position de xC de CMC , lequelse trouve à l’origine ; donc, xS�P � xC � 0. Si on remplace cettevaleur dans l’équation 9.12 et si on isole xP, on obtient :
xP � �xS
mS
mP (9.13)
Il semble maintenant qu’on a un problème, car on ne connaîtpas les masses dans l’équation 9.13. Cependant, on peut établir unerelation entre les masses et les aires des surfaces S et P. Ainsi,
masse = masse volumique × volume
= masse volumique × épaisseur × aire.
Doncms
mP= masse volumiqueS
masse volumiqueP× épaisseurs
épaisseurP× aires
aireP.
Étant donné que la plaque est homogène, les masses volumiques etles épaisseurs sont égales. On obtient alors :
ms
mP= aires
aireP= aires
airec − aires= πR2
π(2R)2 − πR2 = 1
3.
En remplaçant cette valeur et xS � �R dans l’équation 9.13, onobtient :
xP = 13 R. (réponse)
RÉSOLUTION DE PROBLÈMES
1re stratégie : Les problèmes relatifs au centre de masseLes exemples 9.1 et 9.2 donnent trois stratégies permettant de simplifierdes problèmes relatifs au centre de masse : 1) se servir de la symétriede l’objet, qu’elle soit par rapport à un point, une ligne ou un plan ;2) si l’objet peut être divisé en plusieurs parties, considérer chacunedes parties comme une particule, située à son propre centre de masse ;
3) bien choisir ses axes : si le système est un groupe de particules,choisir l’une des particules comme origine. Si le système est un corpscomportant un axe de symétrie, choisir ce dernier comme axe des xou axe des y. Le choix de l’origine est complètement arbitraire ; la position du centre de masse par rapport à l’objet demeure la même,peu importe l’origine d’où on la mesure.
9.3 La deuxième loi de Newton relative à un système de particules
Si on fait rouler une boule de billard et qu’elle entre en contact avec une autre bouleimmobile, on s’attend à ce que ce système conserve un certain mouvement vers l’avantaprès l’impact. Il serait surprenant, par exemple, de voir les deux boules revenir vers soiou se déplacer vers la gauche ou vers la droite.
Le centre de masse du système continue de se déplacer selon un mouvement rectiligne uniforme, sans être influencé par la collision. Si on se concentre sur ce point(qui se trouve toujours à mi-chemin entre les deux corps, parce que ceux-ci sont de masse identique), on peut constater cela par un essai sur une table de billard. Peu importe que la collision se produise sur le côté de la boule, de plein fouet ou entreces deux extrêmes, le centre de masse continue sa route comme si la collision ne s’étaitjamais produite. Voici une analyse détaillée de ce mouvement du centre de masse.
On peut remplacer la paire de boules de billard par un ensemble de n particules de masses (probablement) différentes. Ce ne sont pas les mouvements individuels de ces particules qui importent ici, mais uniquement le mouvement de leur centre de masse. Bien que le centre de masse ne soit qu’un point, il se déplace comme une particule dont la masse est égale à la masse totale du système ; on peut lui attribuerune position, une vitesse et une accélération. On affirme (la preuve est présentée plus loin) que l’équation (vectorielle) qui gouverne le mouvement du centre de massed’un tel système de particules est
�Frés � M�aCM (système de particules). (9.14)
Cette équation est la deuxième loi de Newton relative au mouvement du centre de masse d’un système de particules. On voit que cette équation a la même forme quel’équation �Frés � m�a, qui s’applique à une particule unique. Cependant, il faut spécifierclairement la signification des trois quantités qui apparaissent dans l’équation 9.14.
mS
mP
S
P
s
P
s
P
ms
mP
➤
182 Chapitre 9 Les systèmes de particules
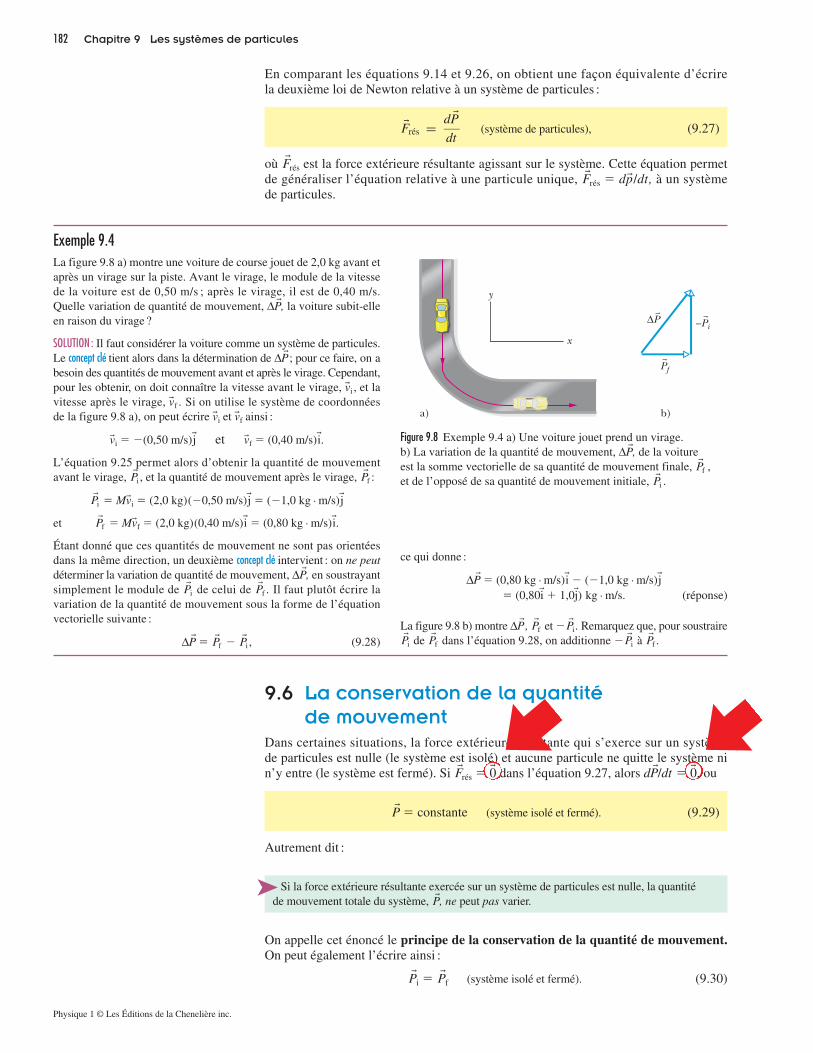
La figure 9.8 a) montre une voiture de course jouet de 2,0 kg avant etaprès un virage sur la piste. Avant le virage, le module de la vitessede la voiture est de 0,50 m/s ; après le virage, il est de 0,40 m/s.Quelle variation de quantité de mouvement, ∆ �P, la voiture subit-elleen raison du virage ?
SOLUTION : Il faut considérer la voiture comme un système de particules.Le concept clé tient alors dans la détermination de ∆ �P; pour ce faire, on abesoin des quantités de mouvement avant et après le virage. Cependant,pour les obtenir, on doit connaître la vitesse avant le virage, �vi , et lavitesse après le virage, �vf . Si on utilise le système de coordonnées de la figure 9.8 a), on peut écrire �vi et �vf ainsi :
�vi � �(0,50 m/s)�j et �vf � (0,40 m/s)�i.L’équation 9.25 permet alors d’obtenir la quantité de mouvementavant le virage, �Pi , et la quantité de mouvement après le virage, �Pf :
�Pi � M�vi � (2,0 kg)(�0,50 m/s)�j � (�1,0 kg • m/s)�jet �Pf � M�vf � (2,0 kg)(0,40 m/s)�i � (0,80 kg • m/s)�i.Étant donné que ces quantités de mouvement ne sont pas orientéesdans la même direction, un deuxième concept clé intervient : on ne peutdéterminer la variation de quantité de mouvement, ∆ �P, en soustrayantsimplement le module de �Pi de celui de �Pf . Il faut plutôt écrire lavariation de la quantité de mouvement sous la forme de l’équationvectorielle suivante :
∆ �P � �Pf � �Pi , (9.28)
ce qui donne :
∆ �P � (0,80 kg • m/s)�i � (�1,0 kg • m/s)�j� (0,80�i � 1,0�j) kg • m/s. (réponse)
La figure 9.8 b) montre ∆ �P, �Pf et � �Pi . Remarquez que, pour soustraire�Pi de �Pf dans l’équation 9.28, on additionne � �Pi à �Pf .
En comparant les équations 9.14 et 9.26, on obtient une façon équivalente d’écrire la deuxième loi de Newton relative à un système de particules :
�Frés = d �Pdt
(système de particules), (9.27)
où �Frés est la force extérieure résultante agissant sur le système. Cette équation permetde généraliser l’équation relative à une particule unique, �Frés � d�p/dt, à un système de particules.
Physique 1 © Les Éditions de la Chenelière inc.
Exemple 9.4
a) b)
x
y
∆P
Pf
–Pi
Figure 9.8 Exemple 9.4 a) Une voiture jouet prend un virage. b) La variation de la quantité de mouvement, ∆ �P, de la voiture est la somme vectorielle de sa quantité de mouvement finale, �Pf ,et de l’opposé de sa quantité de mouvement initiale, �Pi .
9.6 La conservation de la quantité de mouvement
Dans certaines situations, la force extérieure résultante qui s’exerce sur un système de particules est nulle (le système est isolé) et aucune particule ne quitte le système nin’y entre (le système est fermé). Si �Frés � �0 dans l’équation 9.27, alors d �P/dt � �0, ou
�P � constante (système isolé et fermé). (9.29)
Autrement dit :
Si la force extérieure résultante exercée sur un système de particules est nulle, la quantité de mouvement totale du système, �P, ne peut pas varier.
On appelle cet énoncé le principe de la conservation de la quantité de mouvement.On peut également l’écrire ainsi :
�Pi � �Pf (système isolé et fermé). (9.30)

200 Chapitre 10 Les collisions
Figure 10.5 Un bombardement continu de projectiles ayant tous la même quantité de mouvement heurte une cible solidement fixée. La forcemoyenne, �Fmoy, exercée sur la cible est orientée vers la droite ; son moduledépend de la fréquence à laquelle les projectiles entrent en collision ou,ce qui est équivalent, de la fréquence à laquelle les masses entrent en collision avec la cible.
À l’aide des équations 10.2 et 10.3, on constate que la variation de la quantité demouvement d’un corps durant une collision est égale à l’impulsion qui agit sur celui-ci :
�pf � �pi � ��p � �J (théorème de la quantité de mouvement). (10.4)
On appelle l’équation 10.4 théorème de la quantité de mouvement ; c’est simplementune autre façon d’écrire la deuxième loi de Newton. Ce théorème montre que l’impul-sion et la quantité de mouvement sont deux quantités vectorielles qui ont les mêmesunités et les mêmes dimensions. On peut également écrire l’équation 10.4 en employantses composantes :
pfx � pix � �px � Jx , (10.5)
pfy � piy � �py � Jy , (10.6)
et pfz � piz � �pz � Jz . (10.7)
Si Fmoy est le module de la force moyenne dans la figure 10.4 a), on peut exprimerle module de l’impulsion ainsi :
J � Fmoy �t, (10.8)
où �t est la durée de la collision. La valeur de Fmoy doit être telle que l’aire du rectangleillustré à la figure 10.4 b) est égale à l’aire sous la courbe F(t) de la figure 10.4 a).
VÉRIFIEZ VOS CONNAISSANCES 1 : Un parachutiste dont le parachute ne s’est pas ouvertatterrit dans la neige ; il est légèrement blessé. S’il avait atterri sur la terre nue, le temps d’immobilisation aurait été 10 fois plus court, ce qui aurait été fatal. La présence de la neige a-t-elle augmenté, diminué ou laissé inchangée la valeur a) de la variation de la quantité de mouvement du parachutiste, b) de l’impulsion qui immobilise le parachutiste et c) de la forcequi immobilise le parachutiste ?
Séries de collisionsOn peut maintenant étudier la force exercée sur un corps quand celui-ci subit une sériede collisions identiques et répétées. Par exemple, pour jouer un mauvais tour, on peut réglerune machine qui lance des balles de tennis de façon à ce qu’elle les envoie à une fréquencerapide directement contre un mur. Chaque collision exercera une force sur le mur, maisce n’est pas cette force qui est ici intéressante ; on recherche plutôt la force moyenne�Fmoy exercée sur le mur durant le bombardement, c’est-à-dire la force moyenne exercéedurant un grand nombre de collisions.
La figure 10.5 illustre un bombardement régulier de projectiles, de masse m et dequantité de mouvement m�v, qui voyagent sur un axe des x et heurtent une cible solidementfixée. Soit n le nombre de projectiles qui entrent en collision avec la cible durant l’inter-valle �t. Chaque projectile a une quantité de mouvement initiale m�vi et subit une variationde la quantité de mouvement � �p en raison de la collision. La variation totale de la quantitéde mouvement pour n projectiles dans l’intervalle �t est n � �p. Selon la troisième loi de Newton, l’impulsion résultante, �J , exercée sur la cible durant �t est orientée dans ladirection opposée à celle que subissent les projectiles ; elle est donc opposée à n ��p.On peut donc écrire
�J � �n � �p,
où le signe négatif indique que �J de la cible et � �p d’un projectile ont des directionsopposées.
Puisque le mouvement s’effectue le long de l’axe des x, il n’y a que les compo-santes x des quantités de mouvement qui sont nécessaires. L’équation précédenteexprimée en fonction de ses composantes x est :
Jx � �n �px . (10.9)
Si on réarrange l’équation 10.8 et qu’on y insère l’équation 10.9, on obtient la composantex de la force moyenne, Fmoy,x , qui agit sur la cible durant les collisions :
Fmoy,x = Jx
�t= − n
�t�px = − n
�tm �vx . (10.10)
Cette équation donne Fmoy, x en fonction de n/�t, la fréquence à laquelle les projectilesheurtent la cible, et de �vx , la variation de la composante x de la vitesse de ces projectiles.
Physique 1 © Les Éditions de la Chenelière inc.
xCible
v
Projectiles
✔
Physique 1 © Les Éditions de la Chenelière inc.
11.2 Les variables angulaires 223
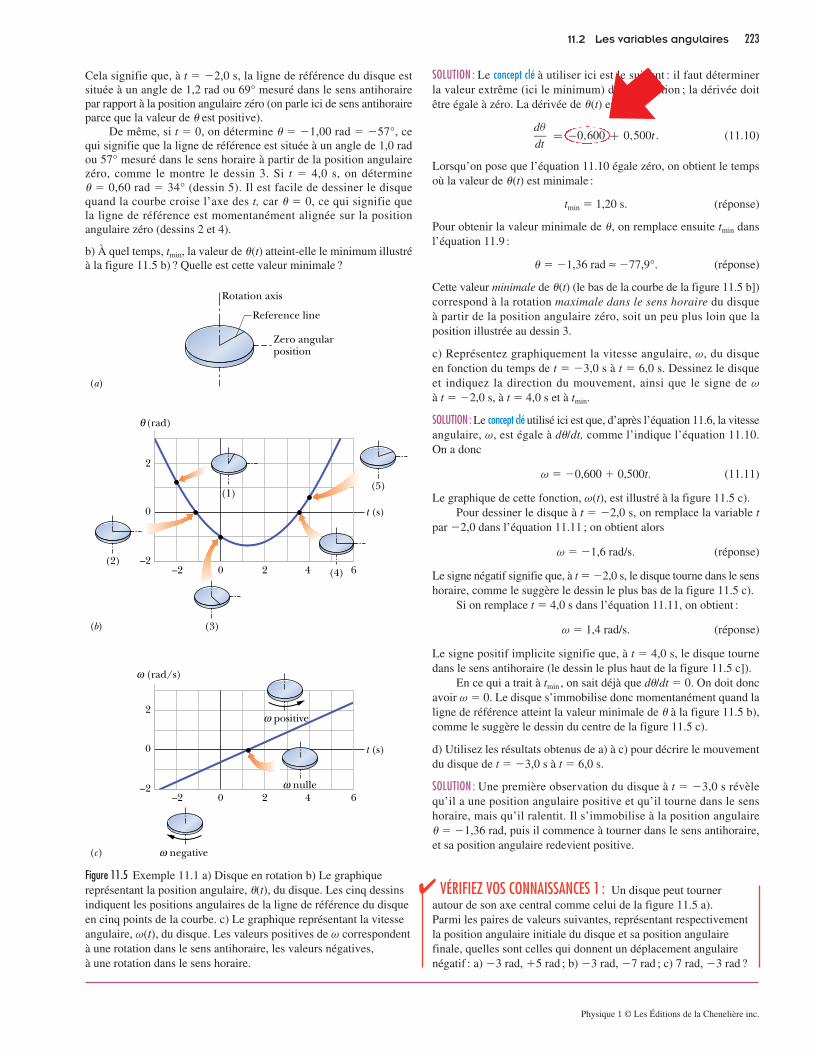
Cela signifie que, à t � �2,0 s, la ligne de référence du disque estsituée à un angle de 1,2 rad ou 69° mesuré dans le sens antihorairepar rapport à la position angulaire zéro (on parle ici de sens antihoraireparce que la valeur de � est positive).
De même, si t � 0, on détermine � � �1,00 rad � �57°, ce qui signifie que la ligne de référence est située à un angle de 1,0 radou 57° mesuré dans le sens horaire à partir de la position angulairezéro, comme le montre le dessin 3. Si t � 4,0 s, on détermine � � 0,60 rad � 34° (dessin 5). Il est facile de dessiner le disquequand la courbe croise l’axe des t, car � � 0, ce qui signifie que la ligne de référence est momentanément alignée sur la positionangulaire zéro (dessins 2 et 4).
b) À quel temps, tmin, la valeur de �(t) atteint-elle le minimum illustréà la figure 11.5 b) ? Quelle est cette valeur minimale ?
SOLUTION : Le concept clé à utiliser ici est le suivant : il faut déterminer la valeur extrême (ici le minimum) d’une fonction ; la dérivée doitêtre égale à zéro. La dérivée de �(t) est
dθ
dt= −0,600 + 0,500t. (11.10)
Lorsqu’on pose que l’équation 11.10 égale zéro, on obtient le tempsoù la valeur de �(t) est minimale :
tmin � 1,20 s. (réponse)
Pour obtenir la valeur minimale de �, on remplace ensuite tmin dansl’équation 11.9 :
� � �1,36 rad ≈ �77,9°. (réponse)
Cette valeur minimale de �(t) (le bas de la courbe de la figure 11.5 b])correspond à la rotation maximale dans le sens horaire du disque à partir de la position angulaire zéro, soit un peu plus loin que la position illustrée au dessin 3.
c) Représentez graphiquement la vitesse angulaire, ω, du disque en fonction du temps de t � �3,0 s à t � 6,0 s. Dessinez le disque et indiquez la direction du mouvement, ainsi que le signe de ωà t � �2,0 s, à t � 4,0 s et à tmin.
SOLUTION : Le concept clé utilisé ici est que, d’après l’équation 11.6, la vitesseangulaire, ω, est égale à d�/dt, comme l’indique l’équation 11.10. On a donc
ω � �0,600 � 0,500t. (11.11)
Le graphique de cette fonction, ω(t), est illustré à la figure 11.5 c).Pour dessiner le disque à t � �2,0 s, on remplace la variable t
par �2,0 dans l’équation 11.11 ; on obtient alors
ω � �1,6 rad/s. (réponse)
Le signe négatif signifie que, à t � �2,0 s, le disque tourne dans le senshoraire, comme le suggère le dessin le plus bas de la figure 11.5 c).
Si on remplace t � 4,0 s dans l’équation 11.11, on obtient :
ω � 1,4 rad/s. (réponse)
Le signe positif implicite signifie que, à t � 4,0 s, le disque tournedans le sens antihoraire (le dessin le plus haut de la figure 11.5 c]).
En ce qui a trait à tmin , on sait déjà que d�/dt � 0. On doit doncavoir ω � 0. Le disque s’immobilise donc momentanément quand laligne de référence atteint la valeur minimale de � à la figure 11.5 b),comme le suggère le dessin du centre de la figure 11.5 c).
d) Utilisez les résultats obtenus de a) à c) pour décrire le mouvementdu disque de t � �3,0 s à t � 6,0 s.
SOLUTION : Une première observation du disque à t � �3,0 s révèlequ’il a une position angulaire positive et qu’il tourne dans le senshoraire, mais qu’il ralentit. Il s’immobilise à la position angulaire � � �1,36 rad, puis il commence à tourner dans le sens antihoraire,et sa position angulaire redevient positive.
VÉRIFIEZ VOS CONNAISSANCES 1 : Un disque peut tourner autour de son axe central comme celui de la figure 11.5 a). Parmi les paires de valeurs suivantes, représentant respectivementla position angulaire initiale du disque et sa position angulairefinale, quelles sont celles qui donnent un déplacement angulairenégatif : a) �3 rad, �5 rad ; b) �3 rad, �7 rad ; c) 7 rad, �3 rad ?
Figure 11.5 Exemple 11.1 a) Disque en rotation b) Le graphiquereprésentant la position angulaire, �(t), du disque. Les cinq dessinsindiquent les positions angulaires de la ligne de référence du disqueen cinq points de la courbe. c) Le graphique représentant la vitesseangulaire, ω(t), du disque. Les valeurs positives de ω correspondentà une rotation dans le sens antihoraire, les valeurs négatives, à une rotation dans le sens horaire.
Zero angularposition
Reference line
Rotation axis
(a)
(b)
(c)
2
0
–2–2 0 2 4 6
(rad)θ
(1)
(2)
(3)
(4)
(5)
t (s)
2
0
–2–2 0 2 4 6
(rad/s)ω
t (s)
negativeω
nulleω
positiveω
✔
230 Chapitre 11 La rotation
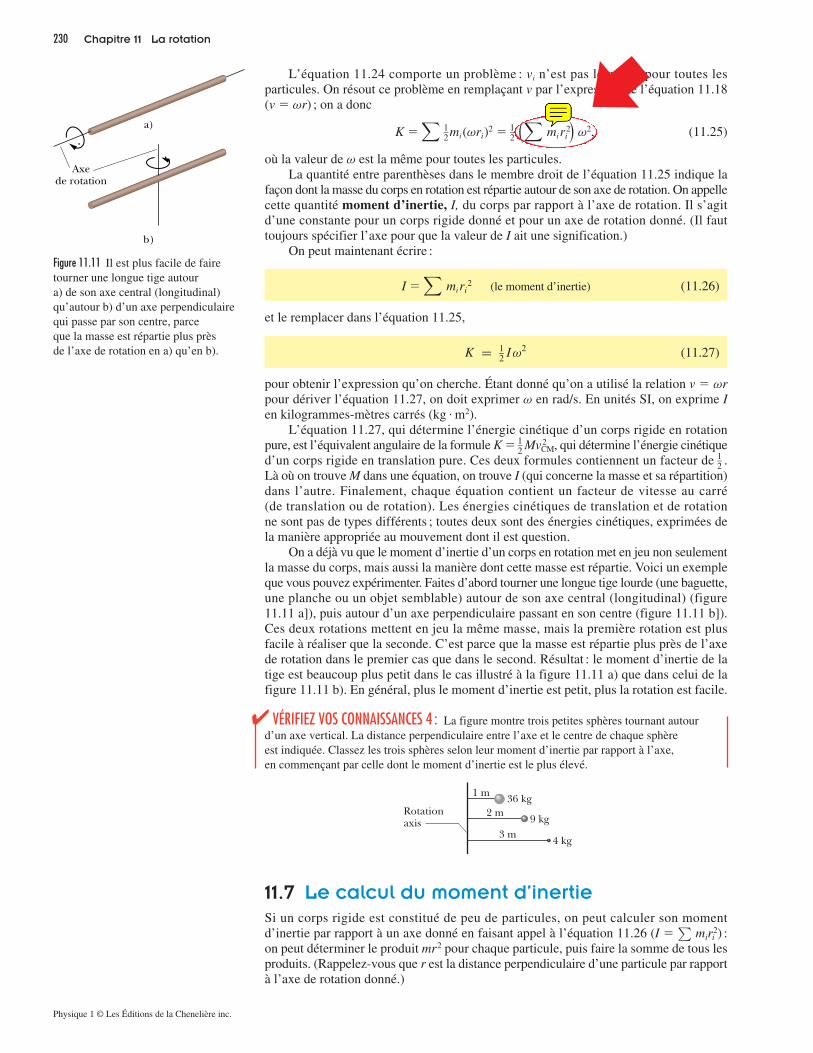
Figure 11.11 Il est plus facile de fairetourner une longue tige autour a) de son axe central (longitudinal)qu’autour b) d’un axe perpendiculairequi passe par son centre, parce que la masse est répartie plus près de l’axe de rotation en a) qu’en b).
L’équation 11.24 comporte un problème : vi n’est pas le même pour toutes les particules. On résout ce problème en remplaçant v par l’expression de l’équation 11.18(v � ωr) ; on a donc
K �∑
12mi(ωri)2 � 1
2 (∑
miri2) ω2, (11.25)
où la valeur de ω est la même pour toutes les particules.La quantité entre parenthèses dans le membre droit de l’équation 11.25 indique la
façon dont la masse du corps en rotation est répartie autour de son axe de rotation. On appellecette quantité moment d’inertie, I, du corps par rapport à l’axe de rotation. Il s’agitd’une constante pour un corps rigide donné et pour un axe de rotation donné. (Il fauttoujours spécifier l’axe pour que la valeur de I ait une signification.)
On peut maintenant écrire :
I �∑
miri2 (le moment d’inertie) (11.26)
et le remplacer dans l’équation 11.25,
K = 12 Iω2 (11.27)
pour obtenir l’expression qu’on cherche. Étant donné qu’on a utilisé la relation v � ωrpour dériver l’équation 11.27, on doit exprimer ω en rad/s. En unités SI, on exprime Ien kilogrammes-mètres carrés (kg • m2).
L’équation 11.27, qui détermine l’énergie cinétique d’un corps rigide en rotationpure, est l’équivalent angulaire de la formule K � 1
2 Mv2CM, qui détermine l’énergie cinétique
d’un corps rigide en translation pure. Ces deux formules contiennent un facteur de 12 . Là où on trouve M dans une équation, on trouve I (qui concerne la masse et sa répartition)dans l’autre. Finalement, chaque équation contient un facteur de vitesse au carré (de translation ou de rotation). Les énergies cinétiques de translation et de rotation ne sont pas de types différents ; toutes deux sont des énergies cinétiques, exprimées dela manière appropriée au mouvement dont il est question.
On a déjà vu que le moment d’inertie d’un corps en rotation met en jeu non seulementla masse du corps, mais aussi la manière dont cette masse est répartie. Voici un exempleque vous pouvez expérimenter. Faites d’abord tourner une longue tige lourde (une baguette,une planche ou un objet semblable) autour de son axe central (longitudinal) (figure11.11 a]), puis autour d’un axe perpendiculaire passant en son centre (figure 11.11 b]).Ces deux rotations mettent en jeu la même masse, mais la première rotation est plusfacile à réaliser que la seconde. C’est parce que la masse est répartie plus près de l’axede rotation dans le premier cas que dans le second. Résultat : le moment d’inertie de latige est beaucoup plus petit dans le cas illustré à la figure 11.11 a) que dans celui de lafigure 11.11 b). En général, plus le moment d’inertie est petit, plus la rotation est facile.
VÉRIFIEZ VOS CONNAISSANCES 4 : La figure montre trois petites sphères tournant autourd’un axe vertical. La distance perpendiculaire entre l’axe et le centre de chaque sphère est indiquée. Classez les trois sphères selon leur moment d’inertie par rapport à l’axe, en commençant par celle dont le moment d’inertie est le plus élevé.
11.7 Le calcul du moment d’inertieSi un corps rigide est constitué de peu de particules, on peut calculer son moment d’inertie par rapport à un axe donné en faisant appel à l’équation 11.26 (I �
∑miri
2) : on peut déterminer le produit mr2 pour chaque particule, puis faire la somme de tous les produits. (Rappelez-vous que r est la distance perpendiculaire d’une particule par rapportà l’axe de rotation donné.)
Physique 1 © Les Éditions de la Chenelière inc.
Axede rotation
a)
b)
✔
Rotationaxis
4 kg3 m
2 m
1 m
9 kg
36 kg
Poste 3
Note
Suppression de 1/2
Physique 1 © Les Éditions de la Chenelière inc.
238 Chapitre 11 La rotation
où � est le moment de force effectuant le travail W, et �i et �f sont les positions angulairesrespectivement avant et après que le travail soit effectué. Quand la valeur de � est constante, l’équation 11.45 se réduit ainsi :
W � �(�f � �i) (le travail, avec un moment de force constant). (11.46)
Le taux auquel le travail est effectué est la puissance, qu’on peut déterminer en faisantappel à l’expression équivalant à l’équation 11.43 appliquée à la rotation :
P = dW
dt= τ
dθ
dt= τω (la puissance, lors de la rotation autour d’un axe fixe). (11.47)
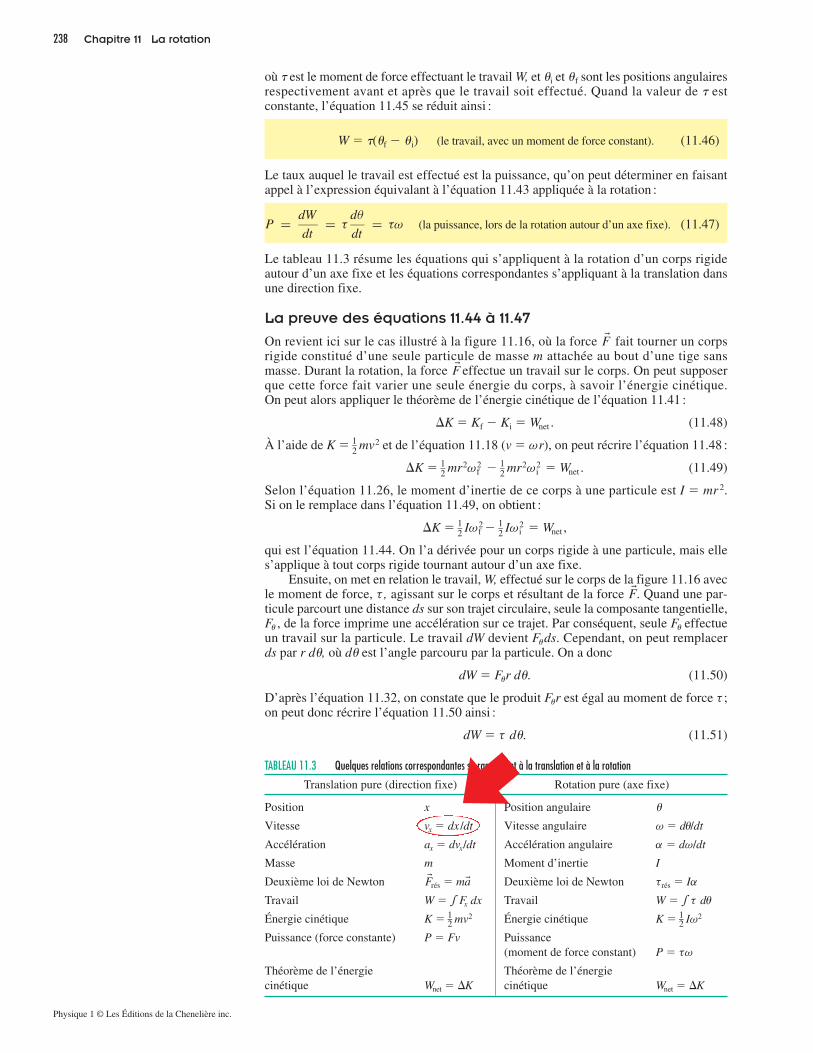
Le tableau 11.3 résume les équations qui s’appliquent à la rotation d’un corps rigideautour d’un axe fixe et les équations correspondantes s’appliquant à la translation dansune direction fixe.
La preuve des équations 11.44 à 11.47
On revient ici sur le cas illustré à la figure 11.16, où la force �F fait tourner un corpsrigide constitué d’une seule particule de masse m attachée au bout d’une tige sansmasse. Durant la rotation, la force �F effectue un travail sur le corps. On peut supposerque cette force fait varier une seule énergie du corps, à savoir l’énergie cinétique. On peut alors appliquer le théorème de l’énergie cinétique de l’équation 11.41 :
�K � Kf � Ki � Wnet . (11.48)
À l’aide de K � 12 mv2 et de l’équation 11.18 (v � ωr), on peut récrire l’équation 11.48 :
�K � 12 mr2ω2
f � 12 mr2ω2
i � Wnet . (11.49)
Selon l’équation 11.26, le moment d’inertie de ce corps à une particule est I � mr 2. Si on le remplace dans l’équation 11.49, on obtient :
�K � 12 Iω2
f � 12 Iω2
i � Wnet ,
qui est l’équation 11.44. On l’a dérivée pour un corps rigide à une particule, mais elles’applique à tout corps rigide tournant autour d’un axe fixe.
Ensuite, on met en relation le travail, W, effectué sur le corps de la figure 11.16 avecle moment de force, τ , agissant sur le corps et résultant de la force �F. Quand une par-ticule parcourt une distance ds sur son trajet circulaire, seule la composante tangentielle,F� , de la force imprime une accélération sur ce trajet. Par conséquent, seule F� effectueun travail sur la particule. Le travail dW devient F� ds. Cependant, on peut remplacer ds par r d�, où d� est l’angle parcouru par la particule. On a donc
dW � F�r d�. (11.50)
D’après l’équation 11.32, on constate que le produit F�r est égal au moment de force τ ;on peut donc récrire l’équation 11.50 ainsi :
dW � τ d�. (11.51)
TABLEAU 11.3 Quelques relations correspondantes se rapportant à la translation et à la rotation
Translation pure (direction fixe) Rotation pure (axe fixe)
Position x Position angulaire �
Vitesse vx � dx /dt Vitesse angulaire ω � d�/dt
Accélération ax � dvx/dt Accélération angulaire α � dω/dt
Masse m Moment d’inertie I
Deuxième loi de Newton �Frés � m�a Deuxième loi de Newton τrés � Iα
Travail W � � Fx dx Travail W � � τ d�
Énergie cinétique K � 12 mv2 Énergie cinétique K � 1
2 Iω2
Puissance (force constante) P � Fv Puissance (moment de force constant) P � τω
Théorème de l’énergie Théorème de l’énergie cinétique Wnet � �K cinétique Wnet � �K
Physique 1 © Les Éditions de la Chenelière inc.
➤
252 Chapitre 12 Le roulement, le moment de force et le moment cinétique
où M est la masse de la roue, ICM est son moment d’inertie par rapport à un axe passant par son centre de masse et R (le rayon de la roue) est la distance perpendiculaire h. Si on remplace IP dans l’équation 12.3 par l’expression correspondante dans l’équation 12.4,on obtient :
K � 12 ICMω2 � 1
2 MR2ω2,
et si on fait appel à la relation vCM � ωR (équation 12.2), on obtient :
K � 12 ICMω2 � 1
2 Mv 2CM. (12.5)
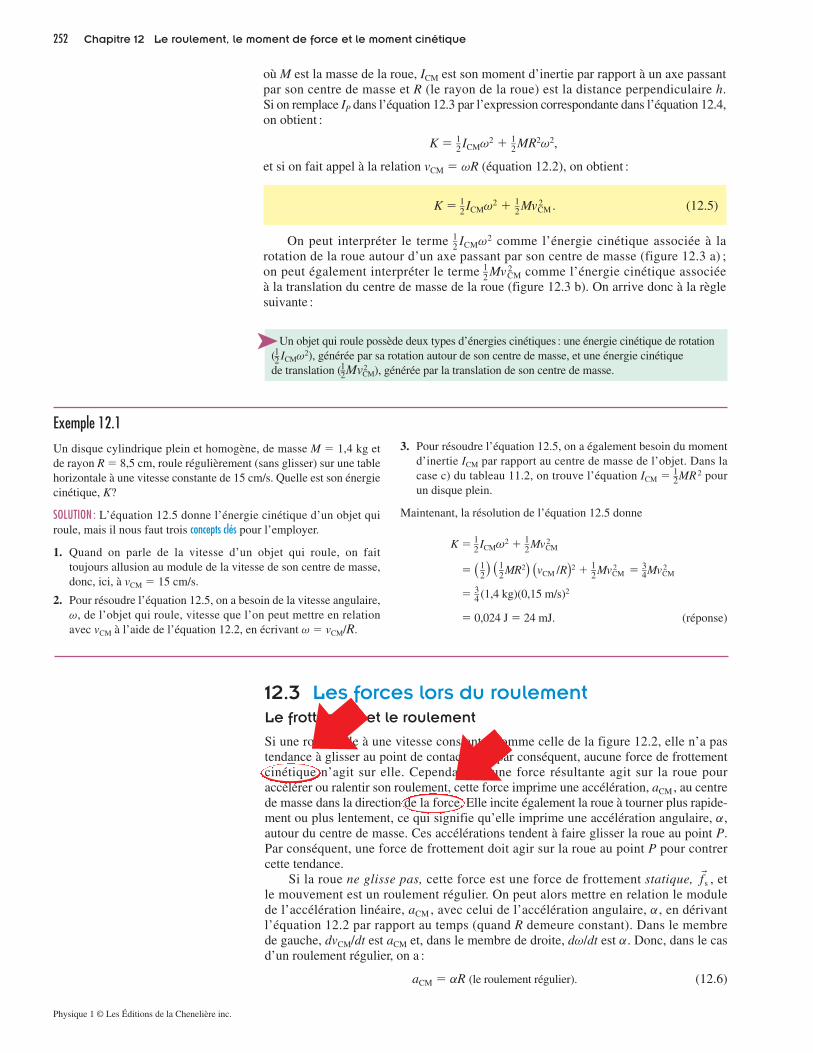
On peut interpréter le terme 12 ICMω2 comme l’énergie cinétique associée à la
rotation de la roue autour d’un axe passant par son centre de masse (figure 12.3 a) ; on peut également interpréter le terme 12 Mv 2
CM comme l’énergie cinétique associée à la translation du centre de masse de la roue (figure 12.3 b). On arrive donc à la règlesuivante :
Un objet qui roule possède deux types d’énergies cinétiques : une énergie cinétique de rotation(12 ICMω2), générée par sa rotation autour de son centre de masse, et une énergie cinétique de translation (12Mv2
CM), générée par la translation de son centre de masse.
Exemple 12.1
Un disque cylindrique plein et homogène, de masse M � 1,4 kg et de rayon R � 8,5 cm, roule régulièrement (sans glisser) sur une tablehorizontale à une vitesse constante de 15 cm/s. Quelle est son énergiecinétique, K?
SOLUTION : L’équation 12.5 donne l’énergie cinétique d’un objet quiroule, mais il nous faut trois concepts clés pour l’employer.
1. Quand on parle de la vitesse d’un objet qui roule, on fait toujours allusion au module de la vitesse de son centre de masse,donc, ici, à vCM � 15 cm/s.
2. Pour résoudre l’équation 12.5, on a besoin de la vitesse angulaire,ω, de l’objet qui roule, vitesse que l’on peut mettre en relationavec vCM à l’aide de l’équation 12.2, en écrivant ω � vCM/R.
3. Pour résoudre l’équation 12.5, on a également besoin du momentd’inertie ICM par rapport au centre de masse de l’objet. Dans lacase c) du tableau 11.2, on trouve l’équation ICM � 1
2MR 2 pour un disque plein.
Maintenant, la résolution de l’équation 12.5 donne
K � 12 ICMω2 � 1
2Mv 2CM
� (12) (1
2MR2) (vCM /R)2 � 12Mv 2
CM � 34Mv 2
CM
� 34 (1,4 kg)(0,15 m/s)2
� 0,024 J � 24 mJ. (réponse)
12.3 Les forces lors du roulementLe frottement et le roulement
Si une roue roule à une vitesse constante, comme celle de la figure 12.2, elle n’a pas tendance à glisser au point de contact P et, par conséquent, aucune force de frottementcinétique n’agit sur elle. Cependant, si une force résultante agit sur la roue pouraccélérer ou ralentir son roulement, cette force imprime une accélération, aCM, au centrede masse dans la direction de la force. Elle incite également la roue à tourner plus rapide-ment ou plus lentement, ce qui signifie qu’elle imprime une accélération angulaire, α,autour du centre de masse. Ces accélérations tendent à faire glisser la roue au point P.Par conséquent, une force de frottement doit agir sur la roue au point P pour contrercette tendance.
Si la roue ne glisse pas, cette force est une force de frottement statique, �fs , et le mouvement est un roulement régulier. On peut alors mettre en relation le module de l’accélération linéaire, aCM , avec celui de l’accélération angulaire, α, en dérivantl’équation 12.2 par rapport au temps (quand R demeure constant). Dans le membre de gauche, dvCM/dt est aCM et, dans le membre de droite, dω/dt est α. Donc, dans le casd’un roulement régulier, on a :
aCM � αR (le roulement régulier). (12.6)
➤
13.2 Les conditions de l’équilibre 279
Figure 13.3 Un ouvrier de la constructionen équilibre statique dans le ciel de New York ; il est plus stable si ses pieds sont écartés que s’ils sontrapprochés.
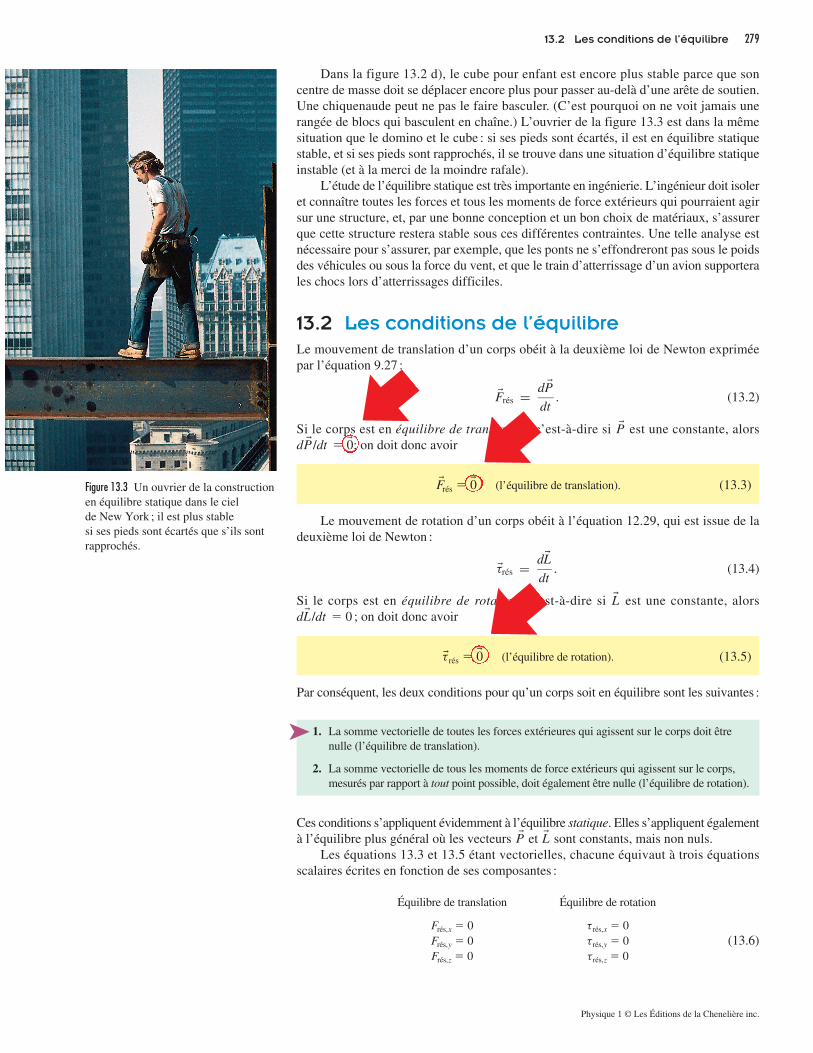
Dans la figure 13.2 d), le cube pour enfant est encore plus stable parce que soncentre de masse doit se déplacer encore plus pour passer au-delà d’une arête de soutien.Une chiquenaude peut ne pas le faire basculer. (C’est pourquoi on ne voit jamais unerangée de blocs qui basculent en chaîne.) L’ouvrier de la figure 13.3 est dans la mêmesituation que le domino et le cube : si ses pieds sont écartés, il est en équilibre statiquestable, et si ses pieds sont rapprochés, il se trouve dans une situation d’équilibre statiqueinstable (et à la merci de la moindre rafale).
L’étude de l’équilibre statique est très importante en ingénierie. L’ingénieur doit isoleret connaître toutes les forces et tous les moments de force extérieurs qui pourraient agirsur une structure, et, par une bonne conception et un bon choix de matériaux, s’assurerque cette structure restera stable sous ces différentes contraintes. Une telle analyse estnécessaire pour s’assurer, par exemple, que les ponts ne s’effondreront pas sous le poidsdes véhicules ou sous la force du vent, et que le train d’atterrissage d’un avion supporterales chocs lors d’atterrissages difficiles.
13.2 Les conditions de l’équilibreLe mouvement de translation d’un corps obéit à la deuxième loi de Newton expriméepar l’équation 9.27 :
�Frés = d �Pdt
. (13.2)
Si le corps est en équilibre de translation, c’est-à-dire si �P est une constante, alorsd �P /dt � �0; on doit donc avoir
�Frés � �0 (l’équilibre de translation). (13.3)
Le mouvement de rotation d’un corps obéit à l’équation 12.29, qui est issue de ladeuxième loi de Newton :
�τrés = d�Ldt
. (13.4)
Si le corps est en équilibre de rotation, c’est-à-dire si �L est une constante, alorsd�L /dt � 0 ; on doit donc avoir
�τ rés � �0 (l’équilibre de rotation). (13.5)
Par conséquent, les deux conditions pour qu’un corps soit en équilibre sont les suivantes :
1. La somme vectorielle de toutes les forces extérieures qui agissent sur le corps doit êtrenulle (l’équilibre de translation).
2. La somme vectorielle de tous les moments de force extérieurs qui agissent sur le corps,mesurés par rapport à tout point possible, doit également être nulle (l’équilibre de rotation).
Ces conditions s’appliquent évidemment à l’équilibre statique. Elles s’appliquent égalementà l’équilibre plus général où les vecteurs �P et �L sont constants, mais non nuls.
Les équations 13.3 et 13.5 étant vectorielles, chacune équivaut à trois équationsscalaires écrites en fonction de ses composantes :
Équilibre de translation Équilibre de rotation
Frés,x � 0 τrés,x � 0Frés,y � 0 τrés,y � 0 (13.6)Frés,z � 0 τrés,z � 0
Physique 1 © Les Éditions de la Chenelière inc.
14.6 L’énergie potentielle gravitationnelle 309
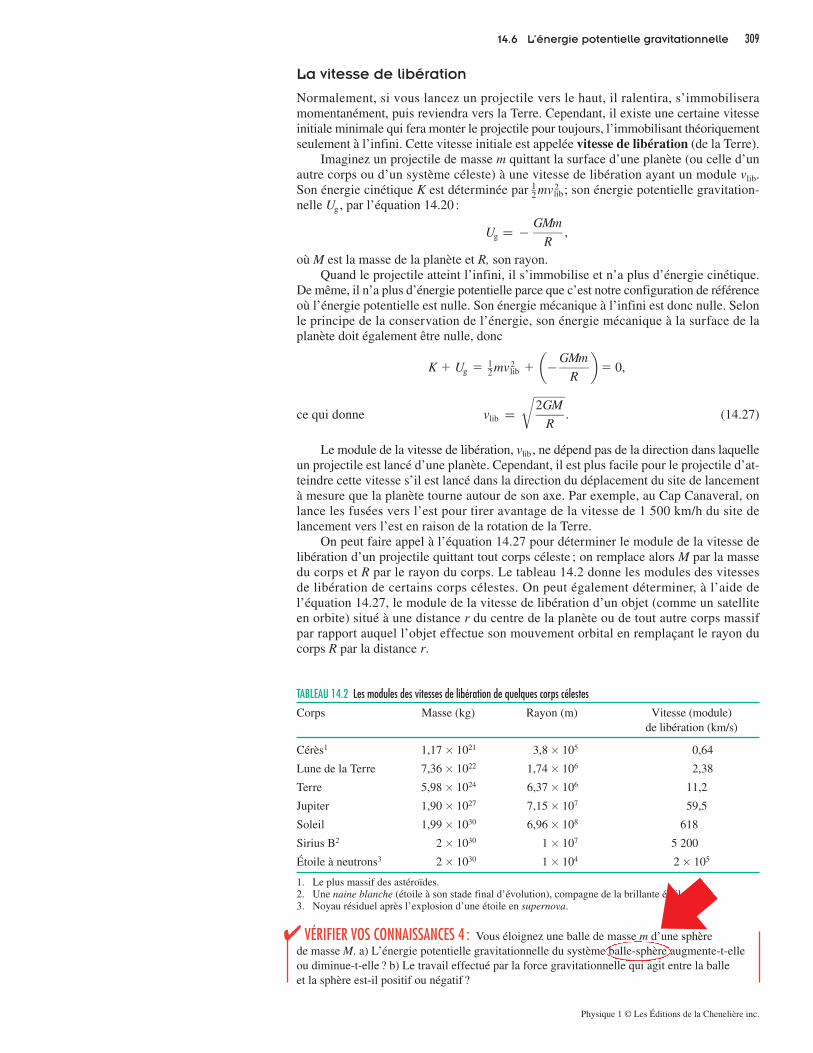
La vitesse de libération
Normalement, si vous lancez un projectile vers le haut, il ralentira, s’immobiliseramomentanément, puis reviendra vers la Terre. Cependant, il existe une certaine vitesseinitiale minimale qui fera monter le projectile pour toujours, l’immobilisant théoriquementseulement à l’infini. Cette vitesse initiale est appelée vitesse de libération (de la Terre).
Imaginez un projectile de masse m quittant la surface d’une planète (ou celle d’unautre corps ou d’un système céleste) à une vitesse de libération ayant un module vlib. Son énergie cinétique K est déterminée par 12 mvlib
2 ; son énergie potentielle gravitation-nelle Ug , par l’équation 14.20 :
Ug = − GMm
R,
où M est la masse de la planète et R, son rayon.Quand le projectile atteint l’infini, il s’immobilise et n’a plus d’énergie cinétique.
De même, il n’a plus d’énergie potentielle parce que c’est notre configuration de référenceoù l’énergie potentielle est nulle. Son énergie mécanique à l’infini est donc nulle. Selonle principe de la conservation de l’énergie, son énergie mécanique à la surface de laplanète doit également être nulle, donc
K � Ug � 12 mvlib
2 �
(−GMm
R
)� 0,
ce qui donne vlib =√
2GM
R. (14.27)
Le module de la vitesse de libération, vlib , ne dépend pas de la direction dans laquelleun projectile est lancé d’une planète. Cependant, il est plus facile pour le projectile d’at-teindre cette vitesse s’il est lancé dans la direction du déplacement du site de lancementà mesure que la planète tourne autour de son axe. Par exemple, au Cap Canaveral, onlance les fusées vers l’est pour tirer avantage de la vitesse de 1 500 km/h du site delancement vers l’est en raison de la rotation de la Terre.
On peut faire appel à l’équation 14.27 pour déterminer le module de la vitesse delibération d’un projectile quittant tout corps céleste ; on remplace alors M par la massedu corps et R par le rayon du corps. Le tableau 14.2 donne les modules des vitesses de libération de certains corps célestes. On peut également déterminer, à l’aide del’équation 14.27, le module de la vitesse de libération d’un objet (comme un satellite en orbite) situé à une distance r du centre de la planète ou de tout autre corps massif par rapport auquel l’objet effectue son mouvement orbital en remplaçant le rayon ducorps R par la distance r.
TABLEAU 14.2 Les modules des vitesses de libération de quelques corps célestes
Corps Masse (kg) Rayon (m) Vitesse (module)de libération (km/s)
Cérès1 1,17 � 1021 3,8 � 105 0,64
Lune de la Terre 7,36 � 1022 1,74 � 106 2,38
Terre 5,98 � 1024 6,37 � 106 11,2
Jupiter 1,90 � 1027 7,15 � 107 59,5
Soleil 1,99 � 1030 6,96 � 108 618,
Sirius B2 2 � 1030 1 � 107 5 200,
Étoile à neutrons3 2 � 1030 1 � 104 2 � 105
1. Le plus massif des astéroïdes.2. Une naine blanche (étoile à son stade final d’évolution), compagne de la brillante étoile Sirius.3. Noyau résiduel après l’explosion d’une étoile en supernova.
VÉRIFIER VOS CONNAISSANCES 4 : Vous éloignez une balle de masse m d’une sphère de masse M. a) L’énergie potentielle gravitationnelle du système balle-sphère augmente-t-elleou diminue-t-elle ? b) Le travail effectué par la force gravitationnelle qui agit entre la balle et la sphère est-il positif ou négatif ?
Physique 1 © Les Éditions de la Chenelière inc.
✔
R-2 Réponses aux sections
c) 1,47 m/s d) 6,11 mm/s2 19. a) 80 m/s b) 110 m/s c) 20 m/s2
20. 5,9 m 21. a) m/s2, m/s3 b) 1,0 s c) 82 m d) �80 m
e) 0, �12, �36, �72 m/s f) �6,0, �18, �30, �42 m/s2
22. Chacun 0,28 m/s2 23. 0,100 m 24. 0,556 s 25. a) 1,6 m/s
b) 18 m/s 26. 3,75 ms 27. a) 3,1 � 106 s � 1,2 mois b) 4,6 � 1013 m
28. 2,78 m/s2 29. 1,6 � 1015 m/s2 30. 21g 31. 2,5 s 32. 4,0 m/s2,
l’axe des x positifs 33. a) �3,56 m/s2 b) 8,43 m/s 34. Oui, le train
rouge, 0 ; le train vert, 10 m/s 35. a) 5,00 m/s b) 1,67 m/s2 c) 7,50 m
36. a) 82 m b) 19 m/s 37. a) 0,743 s b) 6,24 m/s2 38. 0,994 m/s2
39. a) 10,6 m b) 41,5 s 40. 183 m/s b) non 41. a) 29,4 m b) 2,45 s
42. a) 1,54 s b) 27,1 m/s 43. a) 31 m/s b) 6,4 s 44. a) 5,44 s
b) 53,3 m/s c) 5,80 m 45. a) 3,2 s b) 1,3 s
46. a) v =√
v20 + 2gh b) t =
√v2
0 + 2gh − v0
g
c) la même qu’en a) d) t =√
v20 + 2gh + v0
g
47. a) 3,70 m/s b) 1,74 m/s c) 0,698 m 48. 34 m 49. 4,0 m/s
50. 22,0 m/s 51. 857 m/s2, vers le haut 52. a) 101 m b) 13,0 s
53. 1,26 � 103 m/s2, vers le haut 54. a) 350 ms b) 82,0 ms
(Oui, chaque réponse inclut une montée et une descente de 15 cm.)
55. 22,2 cm et 88,9 cm sous la pomme 56. a) 8,0 m/s2 b) 20 m/s
57. 1,5 s 58. 4H 59. a) 5,4 s b) 41 m/s 60. 12,3 m/s 61. a) 76 m
b) 4,2 s 62. a) 8,85 m/s b) 1,00 m 63. a) 1,23 cm b) 4 fois, 9 fois,
16 fois, 25 fois 64. a) 17s b) 2,9 � 102 m 65. 2,34 m
CHAPITRE 4
VÉRIFIEZ VOS CONNAISSANCES 1. a) (8�i � 6�j) m b) oui, il s’agit du plan
des xy (pas de composante z) 2. (On trace �v tangent à la trajectoire,
l’origine du vecteur sur la trajectoire.) a) Premier quadrant
b) troisième quadrant 3. (On calcule la dérivée seconde par rapport
au temps.) 1 et 3, ax et ay sont tous deux constants ; par conséquent,
�a est constant ; 2 et 4, ay est constant mais ax varie ; par conséquent,
�a varie. 4. 4 m/s3, �2 m/s, 3 m 5. a) vx est constant. b) vy est positif
au départ, diminue à zéro puis devient progressivement de plus
en plus négatif. c) ax � 0 tout au long de la trajectoire d) ay � �g
tout au long de la trajectoire 6. a) �4�i m/s b) �8�j m/s2 7. Puisque
v1<v2<v3, le module de la vitesse augmente et la composante
tangentielle de l’accélération est dans le même sens que la vitesse
au point 2 alors qu’elle est dans le sens contraire au point 5, car
le module de la vitesse diminue ; en effet, on a v4>v5>v6. 8. a) 0,
la distance ne change pas b) �70 km/h, la distance augmente
c) �80 km/h, la distance diminue 9. De a) à c), elles augmentent.
QUESTIONS 1. a) (7 m)�i � (1 m)�j � (�2 m)�kb) (5 m)�i � (�3 m)�j � (1 m)�k c) (�2 m) 2. a) 1 et 3 : ay est constant
mais ax ne l’est pas, donc �a ne l’est pas non plus, 2 : ax est constant
mais ay ne l’est pas ; �a ne l’est pas non plus, 4 : ax et ay sont constants ;
�a est constant b) �2 m/s2, 3m/s 3. a), b), c) 4. Oui (la composante
verticale de �v est vers le bas) 5. a) Ils sont tous égaux. b) 1 et 2 sont
égaux (la fusée est lancée vers le haut), 3 et 4 sont égaux (la fusée
est lancée vers le sol). 6. (2 m/s)�i � (�4 m/s)�j 7. a) 3, 2, 1 b) 1, 2, 3
c) Elles sont toutes égales. d) 6, 5, 4 8. a) 0 b) 350 km/h c) 350 km/h
d) La chute durerait le même temps, le mouvement vertical
demeure inchangé. 9. a) Inférieure b) impossible de répondre
c) égale d) impossible de répondre 10. a) Toutes s’équivalent.
b) Toutes s’équivalent. c) 3, 2, 1 d) 3, 2, 1 11. a) 2 b) 3 c) 1 d) 2 e) 3
f) 1 12. 2, alors que 1 et 4 s’équivalent, puis 3 13. a) Oui b) non
c) oui 14. La composante radiale décrit la variation de l’orientation
de la vitesse, alors que la composante tangentielle décrit le taux de
variation du module de la vitesse. 15. a) non b) non c) non d) non
e) oui f) non g) non 16. a) et b) nulle (module de la vitesse
minimum ou maximum) EXERCICES ET PROBLÈMES
1. a) (�5,00�i � 8,00�j) m b) 9,43 m c) 122° e) (8,00�i � 8,00�j) m
f) 11,3 m g) �45,0° 2. a) 6,2 m 3. a) (�7,0�i � 12�j) m b) au plan
des xy 4. 1,03 km, horizontalement vers l’ouest 5. 7,59 km/h 22,5°
est par rapport au nord 6. (�0,70 m/s)�i � (1,4 m/s)�j � (�0,40 m/s)�k7. a) (3,00�i � 8,00t�j) m/s b) (3,00�i � 16,0�j) m/s c) 16,3 m/s
d) �79,4° 8. a) 63,1 km, 18,3° sud par rapport à l’est b) 0,70 km/h,
18,3° sud par rapport à l’est c) 1,56 km/h d) 1,20 km/h, 33,4° nord
par rapport à l’est 9. a) (8t�j � 1�k) m/s b) 8�j m/s2
10. a) (�1,5 m/s2)�i � (0,50 m/s2)�k b) 1,6 m/s2, dans le plan des xz,
à 162° de l’axe des x positifs 11. a) (6,00�i � 106�j) m
b) (19,0�i � 224�j) m/s c) (24,0�i – 336�j) m/s2 d) �85,2° par rapport
à l’axe des x positifs 12. (�2,10 m/s2)�i � (2,81 m/s2)�j13. a) (�1,50�j) m/s b) (4,50�i � 2,25�j) m 14. a) (�18 m/s2)�ib) 0,75 s c) jamais d) 2,2 s 15. a) 45 m b) 22 m/s 16. 60°
17. a) 62 ms b) 4,8 � 102 m/s 18. a) 0,495 s b) 3,07 m/s
19. a) 0,205 s b) 0,205 s c) 20,5 cm d) 61,5 cm 20. a) 18 cm
b) 1,9 m 21. a) 2,00 ns b) 2,00 mm c) 1,00 � 107 m/s
d) 2,00 � 106 m/s 22. 25,9 cm 23. a) 16,9 m b) 8,21 m c) 27,6 m
d) 7,26 m e) 40,2 m f) 0 24. a) 95 m b) 31 m 25. À 4,8 cm
26. a) 38 pi/s b) 32 pi/s c) 9,3 pi 28. a) 12,0 m b) 19,2 m/s, 4,80 m/s
c) non 29. a) 11 m b) 23 m c) 17 m/s d) 63° sous l’horizontale
30. a) 20 m/s b) 36 m/s c) 74 m 31. a) 24 m/s b) 65° au-dessus
de l’horizontale 32. a) 1,60 m b) 6,86 m c) 2,86 m
33. a) 10,0 s b) 897 m 34. 78,5° 35. La troisième marche
36. 5,8 m/s 37. a) 202 m/s b) 806 m c) 161 m/s d) �171 m/s
38. a) 20,3 m/s b) 21,7 m/s 39. a) Oui b) 2,56 m 40. a) Oui
b) 20 cm c) non d) 86 cm 41. Entre les angles de 31° et
de 63° au-dessus de l’horizontale 42. 4,0 m/s2 43. a) 7,49 km/s
b) 8,00 m/s2 44. a) 0,94 m b) 19 m/s c) 2,4 � 103 m/s2 d) 0,050 s
45. a) 19 m/s b) 35 tours/min c) 1,7 s 46. a) 7,32 m à l’ouest
du centre b) 7,32 m au nord du centre 47. a) 0,034 m/s2 b) 84 min
48. a) 7,3 km b) 80 km/h 49. a) 12 s b) 4,1 m/s2, vers le bas
c) 4,1 m/s2, vers le haut 50. a) 1,3 � 105 m/s b) 7,9 � 105 m/s2
c) Ils augmentent. 51. 1,6 � 102 m/s2 52. a) 4,24 m, 45,0°
b) 5,54 m, 67,5° c) 6,00 m, 90,0° d) 4,24 m, 135° e) 0,849 m/s,
135° f) 0,942 m/s, 90,0° g) 0,942 m/s, 180° h) 0,296 m/s2, 180°
Physique 1 © Les Éditions de la Chenelière inc.
Poste 3
Note
Suppression des crochets
R-4 Réponses aux sections
c) Elle augmente. d) Non 4. a) Vers le haut b) Horizontale, dans
la direction opposée à la poussée c) Elle demeure la même.
d) Elle augmente. e) Elle augmente. 5. a) La valeur diminue.
b) Elle diminue. c) Elle augmente. d) Elle augmente. e) Il aug-
menterait. 6. a) Elle diminue. b) Elle diminue. c) Elle diminue.
d) Elle diminue. e) Il diminuerait. 7. a) La masse m du bloc
b) Il est égal (il s’agit d’une paire action-réaction). c) La force
exercée sur la dalle est orientée dans la même direction que la force
extérieure ; la force agissant sur le bloc est orientée dans la direction
opposée. d) La masse M de la dalle 8. a) Il est égal. b) Il est
inférieur. 9. 4, 3 puis 1, 2 et 5 sont égaux. 10. a) Il est le même
pour toutes les positions. b) Il est le même pour toutes les positions.
c) 2, 3 et 1 EXERCICES ET PROBLÈMES 1. a) 198 N b) 123 N 2. 2°
3. 0,61 4. 157 N 5. a) 189 N b) 0,570 m/s2 6. 18° 7. a) 0,13 N
b) 0,12 8. b) 240 N c) 60 % 9. a) Non b) (�12 N)�i � (5,0 N)�j10. a) 6,0 N vers la gauche b) 3,6 N vers la gauche c) 3,1 N vers
la gauche 12. a) 110 N b) 1,3 � 102 N c) Non d) 46 N e) 17 N
13. a) 3,0 � 102 N b) 1,3 m/s2 14. 0,53 15. a) 66 N b) 2,3 m/s2
16. a) 11 N b) 0,14 m/s2, vers la droite 17. b) 3,0 � 107 N
18. a) 8,6 N b) 46 N c) 39 N 19. 103 N 20. a) 17 N, vers le haut
de la pente b) 20 N, vers le haut de la pente c) 15 N, vers le haut
de la pente 21. a) 0 b) 3,9 m/s2, vers le bas de la pente c) 1,0 m/s2,
vers le bas de la pente 22. 3,3 kg 23. a) 3,5 m/s2 b) 0,21 N c) Les
blocs se déplaceraient indépendamment l’un de l’autre. 24. 8,5 N
25. 488 N 26. a) 1,05 N de tension b) 3,62 m/s2 au bas du plan
incliné c) Les réponses seraient les mêmes, sauf que la tige est
sous compression. 27. a) 6,1 m/s2, vers la gauche b) 0,98 m/s2,
vers la gauche 28. a) 3,0 � 105 N b) 1,2° 29. g(sinθ �√
2uc cosθ)
30. a) 19° b) 3,3 kN 31. 9,9 s 32. a) 3,2 � 102 km/h
b) 6,5 � 102 km/h c) Non, c’est irréaliste. 33. 6,2 kN 34. 3,75
35. 2,3 36. 9,7 g 37. À environ 48 km/h 38. a) 3,7 kN, vers le haut
b) 1,3 kN, vers le bas 39. 21 m 40. a) 3,7 kN, vers le haut b) 2,3 kN,
vers le bas 41. a) √
Mgr/m 42. a) 275 N b) 877 N 43. a) Il se sent
léger. b) 111 N c) 778 N d) 223 N en haut et 1,11 kN en bas 44. 12°
45. 2,2 km 46. a) 210 N b) 44,0 m/s 47. b) 8,74 N c) 37,9 N,
en direction radiale vers l’intérieur d) 6,45 m/s 48. a) 69 km/h
b) 1,4 � 102 km/h c) Oui, c’est acceptable.
CHAPITRE 7
VÉRIFIEZ VOS CONNAISSANCES 1. a) Elle diminue. b) Elle reste la même.
c) Il est négatif en a) et nul en b). 2. d, c, b et a 3. a) Elle est égale
à ce qu’elle était. b) Il a une valeur inférieure à ce qu’elle était.
4. a) Il est positif. b) Il est négatif. c) Il est nul. 5. Elle est nulle.
QUESTIONS 1. Elles sont toutes égales. 2. a) Il est positif. b) Il est
négatif. c) Il est négatif. 3. a) Il est positif. b) Il est nul. c) Il est
négatif. d) Il est négatif. e) Il est nul. f) Il est positif. 4. a) 3 m
b) 3 m c) 0 et 6 m d) vers la direction des x négatifs 5. a) A, B, C
b) C, B, A c) C, B, A d) A : 2 ; B : 3 ; C : 1 6. b (travail positif),
a (travail nul), c (travail négatif), d (travail encore plus négatif)
7. Ils sont tous égaux. 8. a) oui b) oui c) oui d) non e) non
9. c, d puis a et b, qui sont égales, et, enfin, f et e. 10. a) A b) B
11. a) 2F1 b) 2W1 12. a) 3 et 6 b) 1 suivi de 4 puis 2 et 5 sont égaux
(nuls), ensuite 6 et finalement 3. c) 1 et 4 sont égaux, puis 2 et 5
sont égaux (nuls), ensuite 6 et finalement 3. 13. B, C, A EXERCICES
ET PROBLÈMES 1. 1,2 � 106 m/s 2. a) 5 � 1014 J b) 0,1 mégatonne
de TNT c) 8 bombes 3. a) 3,6 kJ b) 1,9 kJ c) 1,1 � 1010 J
4. a) 2,4 m/s b) 4,8 m/s 5. a) 2,9 � 107 m/s b) 2,1 � 10�13 J
6. 5,0 kJ 7. a) 592 J b) 0 c) 0 d) 592 J 8. a) 0,32 J 9. a) 1,7 � 102 N
b) 3,4 � 102 m c) �5,8 � 104 J d) 3,4 � 102 N e) 1,7 � 102 m
f) �5,8 � 104 J 10. 5,3 � 102 J 11. a) 1,50 J b) Une augmentation
12. 20 J 13. 15,3 J 14. a) 36 kJ b) 200 J 15. a) 98 N b) 4,0 cm
c) 3,9 J d) �3,9 J 16. a) 268 N b) �401 J c) 401 J d) 0 e) 0
17. a) 1,2 � 104 J b) �1,1 � 104 J c) 1,1 � 103 J d) 5,4 m/s
18. a) 8,84 kJ b) 7,84 kJ c) 6,84 kJ 19. a) �3Mgd/4 b) Mgd
c) Mgd/4 d) √
gd/2 20. 1,25 kJ 21. a) �0,043 J b) �0,13 J
22. a) 0,29 J b) �1,8 J c) 3,5 m/s d) 23 cm 23. a) 6,6 m/s b) 4,7 m
24. 25 J 25. 8,0 � 102 J 26. a) 12 J b) 4,0 m c) 18 J 27. 0, à l’aide
des deux méthodes 28. a) 2,3 J b) 2,6 J 29. �6 J 30. 2,7 � 105 W
31. 487 W 32. a) 28 W b) (6,0 m/s)�j 33. a) 0,83 J b) 2,5 J c) 4,2 J
d) 5,0 W 34. a) 900 J b) 113 W c) 225 W 35. 7,4 � 102 W 36. a) 0
b) �354 W 37. 68 kW 38. a) 1,7 W b) 0 c) �1,7 W 39. a) 2,6 � 105 J
b) 0,58 hp � 433 W 40. a) 1,0 � 102 J b) 67 W c) 33 W
CHAPITRE 8
VÉRIFIEZ VOS CONNAISSANCES 1. Non (il faut tenir compte du voyage
aller-retour sur la petite boucle). 2. 3, 1, 2 (voir l’équation 8.6)
3. a) Elles sont toutes égales. b) Ils sont tous égaux. 4. a) CD, AB,
BC (zéro) (Vérifier les modules des pentes.) b) Vers la direction
positive des x 5. Elles sont toutes égales. QUESTIONS 1. a) 12 J
b) �2 J 2. c et d sont égaux, puis a et b sont égaux. 3. a) Elles sont
toutes égales. b) Elles sont toutes égales. 4. a) Ils sont tous égaux.
b) Elles sont toutes égales. 5. a) Le sommet 4 b) Il revient à son
point de départ et reprend son mouvement vers la droite.
c) Le sommet 1 d) Le sommet 1 6. a) AB, CD, puis BC et DE
qui sont égales. b) 5 J c) 5 J d) 6 J e) FG f) DE 7. a) fL b) 0,50
c) 1,25 d) 2,25 e) Cas b) : au centre ; cas c) : à droite ; cas d) : à gauche
8. a) Inférieure à D b) Égale à D 9. a) Elle augmente. b) Elle
diminue. c) Elle diminue. d) Elle est constante dans AB et BC,
mais diminue pour CD. EXERCICES ET PROBLÈMES 1. 8,9 � 103 N/m
2. a) 167 J b) �167 J c) 196 J d) 29,4 J e) 167 J f) �167 J g) 296 J
h) 129 J 3. a) 4,31 mJ b) �4,31 mJ c) 4,31 mJ d) �4,31 mJ
e) Elles augmenteraient toutes (elles doublent). 4. a) 0 b) mgh/2
c) mgh d) mgh/2 e) mgh f) Elle augmenterait. 5. a) mgL b) �mgL
c) 0 d) �mgL e) mgL f) 0 g) Elle serait égale. 6. a) 4mgR b) 3mgR
c) 5mgR d) mgR e) 2mgR f) Elles resteraient les mêmes. 7. a) 184 J
b) �184 J c) �184 J 8. a) mgL (1 � cos θ) b) �mgL (1 � cos θ)
c) mgL (1 � cos θ) d) Elles augmenteraient (en valeur absolue).
9. a) 2,08 m/s b) 2,08 m/s c) Elle augmenterait. 10. a) 12,9 m/s
Physique 1 © Les Éditions de la Chenelière inc.