- Asservir une grandeur physique - Réguler
26
- Asservir une grandeur physique - Réguler - Les grandeurs physiques sont transformées en nombres - Utilisation d algorithmes de traitements numériques - Implantation des algorithmes: - microcontrôleurs - DSP - microordinateurs - FPGA, CPLD,ASICS... AUTOMATIQUE NUMERIQUE
description
AUTOMATIQUE NUMERIQUE. - Asservir une grandeur physique - Réguler - Les grandeurs physiques sont transformées en nombres - Utilisation d algorithmes de traitements numériques - Implantation des algorithmes: - microcontrôleurs - DSP - microordinateurs - FPGA, CPLD,ASICS. - PowerPoint PPT Presentation
Transcript of - Asservir une grandeur physique - Réguler
- Asservir une grandeur physique
- Réguler
- Les grandeurs physiques sont transformées en nombres
- Utilisation d algorithmes de traitements numériques
- Implantation des algorithmes:- microcontrôleurs- DSP- microordinateurs- FPGA, CPLD,ASICS...
AUTOMATIQUE NUMERIQUE
- Début : années 50 (militaire et spatial)
- Robotique
- Commande de process
- Equipement automobile, avionique, radars
- Instrumentation
- Biomédical
- Télécommunications.
DOMAINES D ’APPLICATIONS
- Pas de dérive des performances
- Peu sensible au bruit
- Souplesse de mise au point
- Passage de l ’analogique au numérique
- perte d ’information
- retards
- vitesse de traitement
AVANTAGES et INCONVENIENTSdes TRAITEMENTS NUMERIQUES
- L’échantillonnage, la quantification et la restitution
- Utilisation de la transformée en Z
- Stabilité et précision des systèmes échantillonnés
- L’identification
- Les correcteurs P,PI,PID,PI2D et PI3D
Les régulateurs polynomiaux Commande LQI Correcteurs à modèles internes Commande par retour d ’états
par logique floue
PLAN DU COURS
- Réglages échantillonnés Hansruedi Bühler
- Commande numérique des systèmes dynamiques Roland Longchamp
- Electronique - Systèmes bouclés linéaires de communication et de filtrage F.Manneville J.Esquieu
- La commande par calculateur M.Ksouri P.Borne
Bibliographie
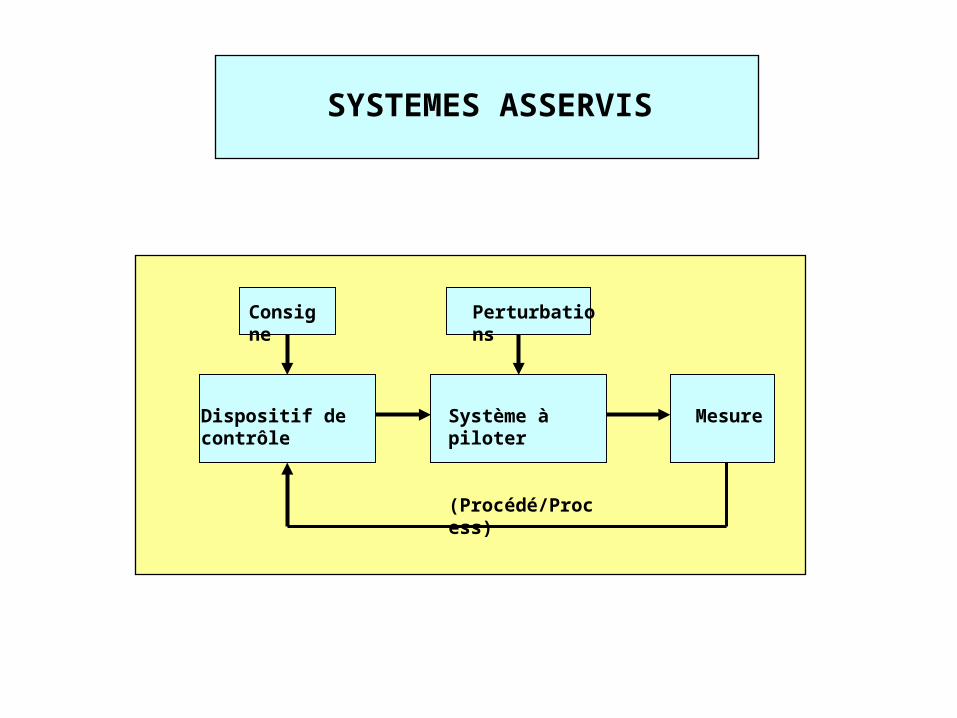
SYSTEMES ASSERVIS
Dispositif de contrôle Système à piloter (Procédé/Process)
PerturbationsConsigne
Mesure
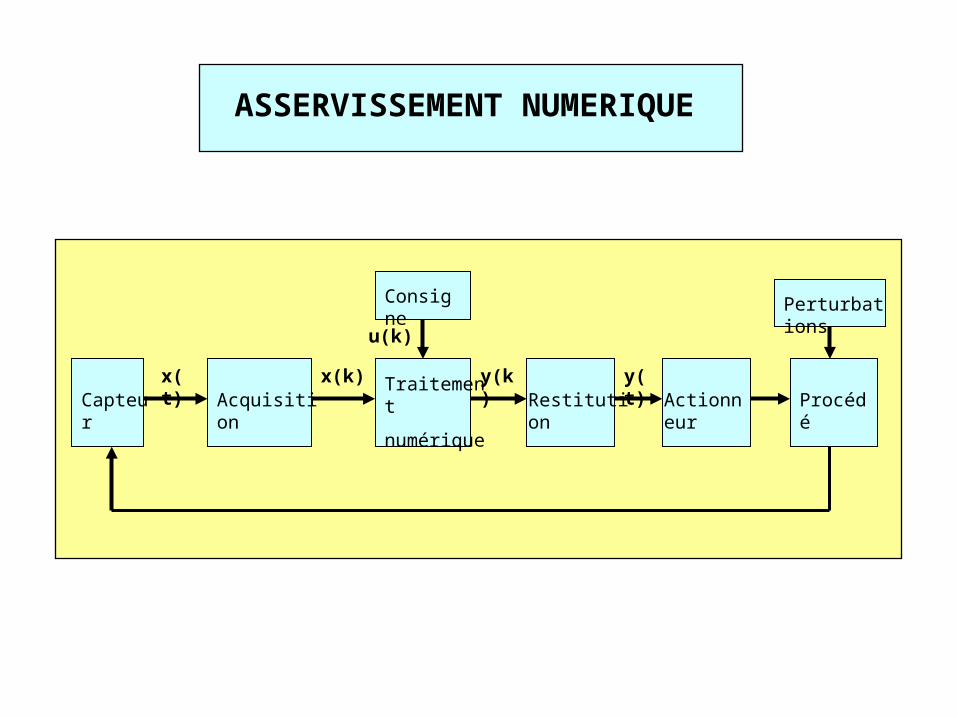
AcquisitionTraitement
numériqueRestitutionCapteur Actionneur Procédé
PerturbationsConsigne
x(t) x(k) y(k) y(t)
u(k)
ASSERVISSEMENT NUMERIQUE
FREQUENCE d ’échantillonnage - Condition de Nyquist (Théorème de
Shannon)- Filtre antirepliement du spectre (anti-aliasing)
ECHANTILLONNEUR-BLOQUEUR- Rôle- Problèmes liés à l ’impédance
QUANTIFICATION - Résolution du convertisseur - Temps de réponse
- Linéarité- Précision et dynamique
ACQUISITIONProduire une suite de nombre entiers x(k) à partir du
signal analogique x(t)
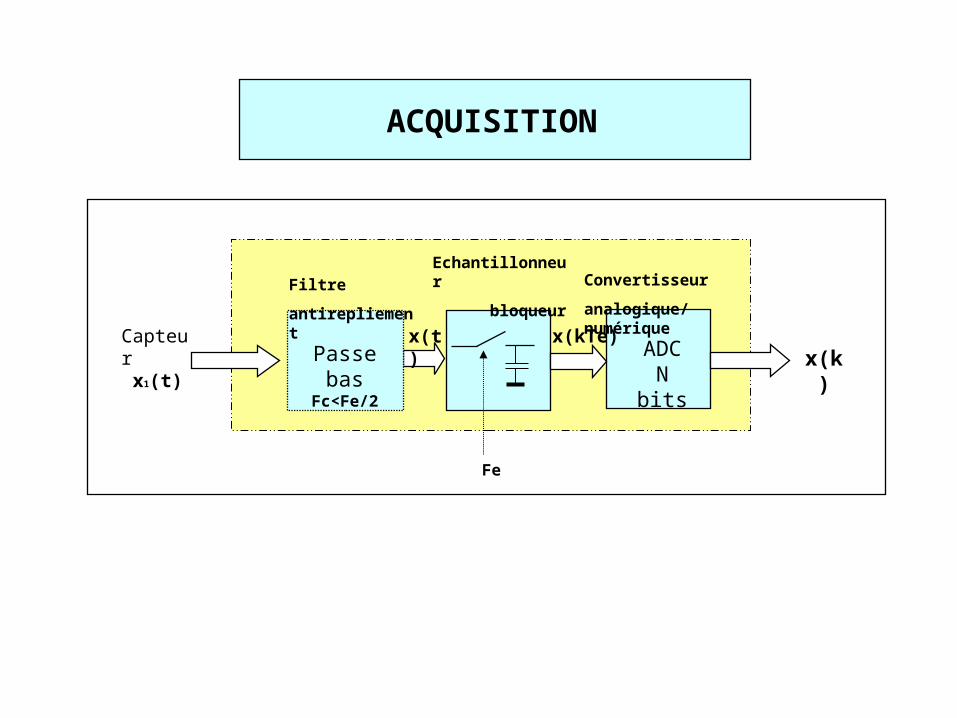
ACQUISITION
ADCN bits
Capteurx1(t) Passe bas
Fc<Fe/2
Fe
x(k)x(t) x(kTe)
Filtre
antirepliement
Echantillonneur
bloqueur
Convertisseur
analogique/numérique
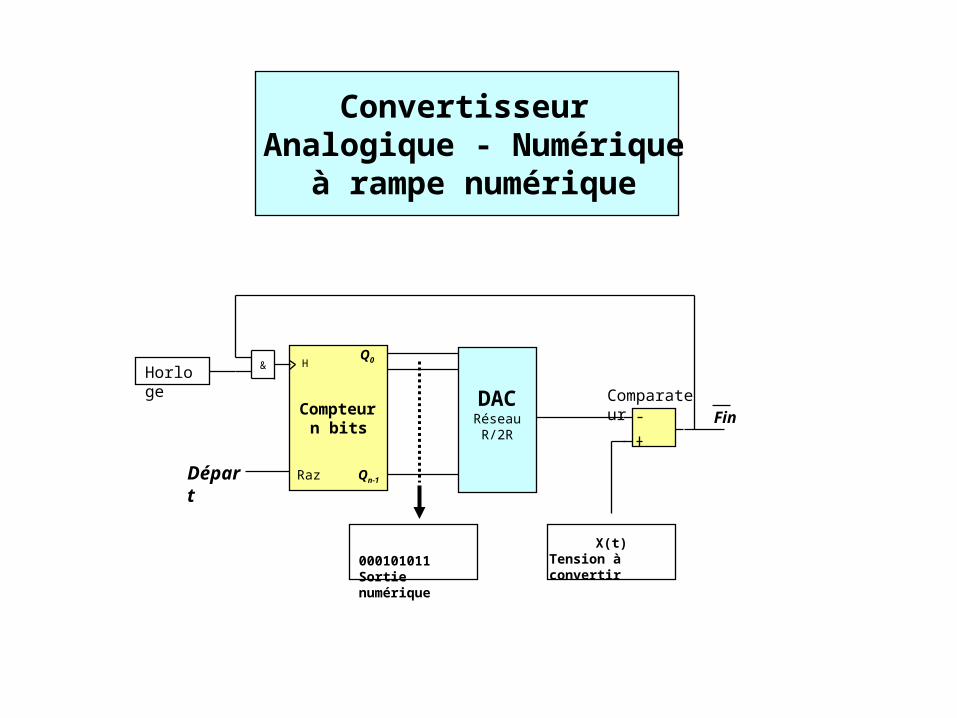
Convertisseur Analogique - Numérique
à rampe numérique
Compteurn bits
&
Fin
RazDépart
H
X(t)Tension à convertir
DACRéseauR/2R
000101011Sortie numérique
Q0
Qn-1
Horloge
Comparateur
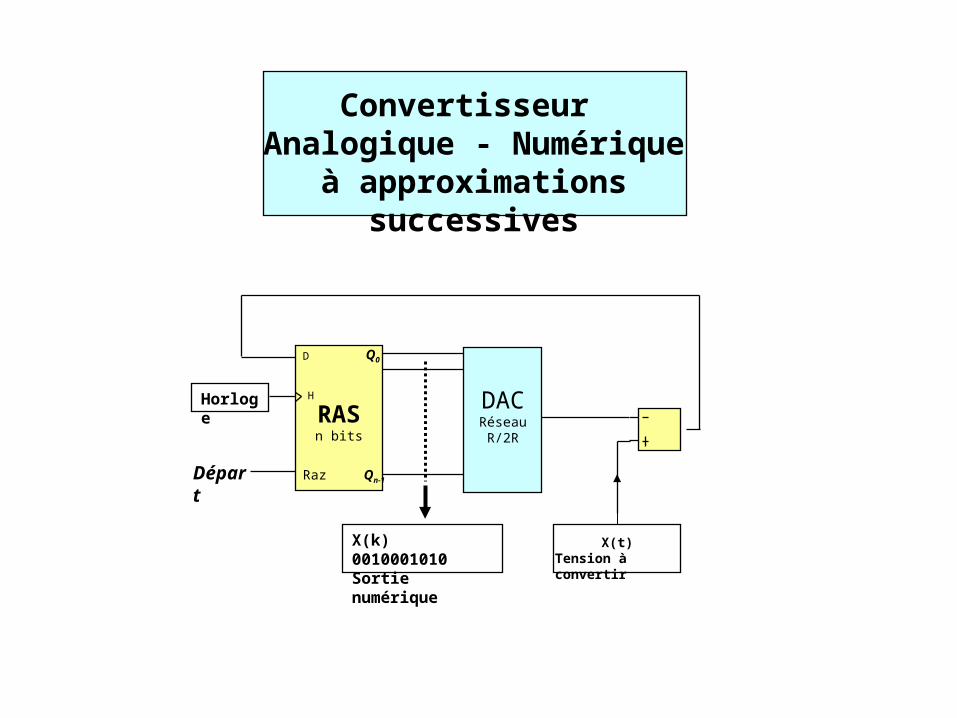
Convertisseur Analogique - Numérique
à approximations successives
RASn bits
RazDépart
H
X(t)Tension à convertir
DACRéseauR/2R
X(k) 0010001010Sortie numérique
Q0
Qn-1
Horloge
D
Autres convertisseurs Analogique - Numérique
Convertisseur « Flash »
Convertisseur « sigma-delta »
(voir TD 1)
- Bloqueur d ’ordre 0 (registre de sortie)
- DAC ou MLI (PWM)
- Filtre passe-bas analogique
RESTITUTION
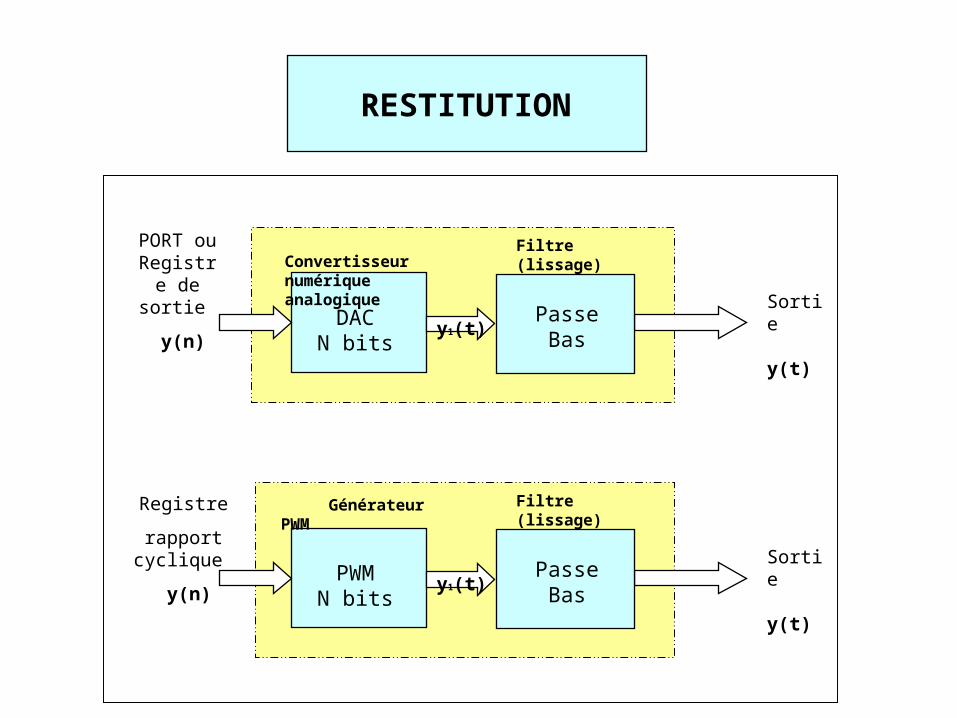
RESTITUTION
PORT ou Registre de sortie
y(n)
Sortie y(t) DAC
N bits
Convertisseur numérique analogique
PasseBas
Filtre (lissage)
y1(t)
Sortie y(t) PWM
N bits
Générateur PWM
PasseBas
Filtre (lissage)
y1(t)
Registre
rapport cyclique
y(n)
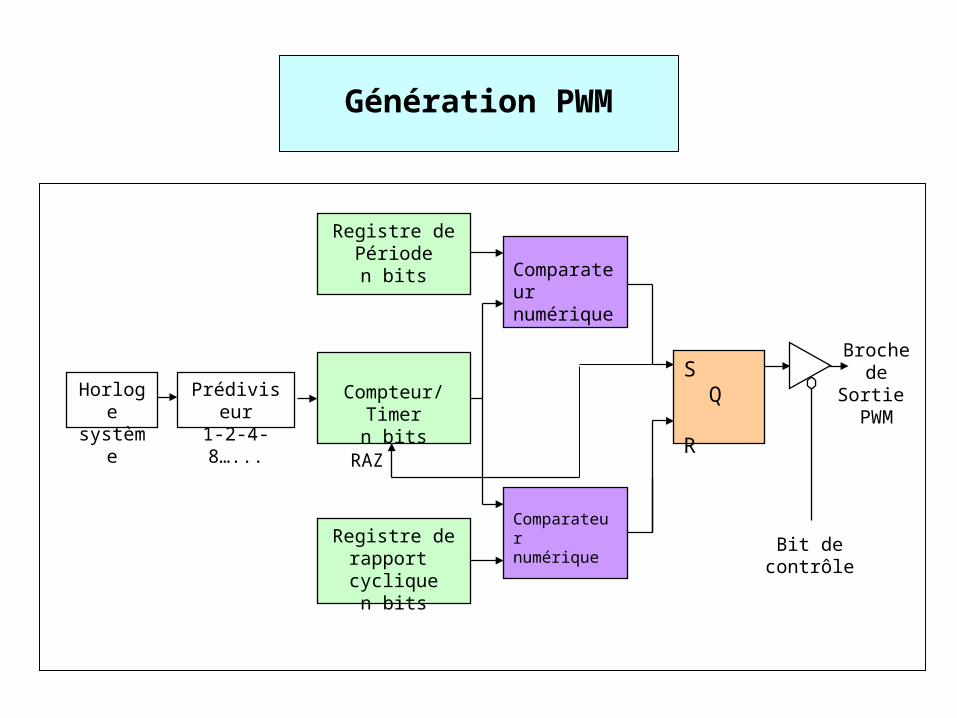
Génération PWM
Horloge système
Prédiviseur1-2-4-8…...
Compteur/Timern bits
Registre de Périoden bits
Comparateurnumérique
RAZ
Registre derapport cyclique
n bits
Comparateurnumérique
S Q
R
Bit de contrôle
Broche deSortie PWM
- Critères de choix:- Complexité du traitement- Rapidité- Coûts
- Programmables- Microcontrôleurs- DSP- Microordinateurs
- Câblés- CPLD- ASIC
LES DISPOSITIFS DE TRAITEMENT
A) Généralités et définitions- Signal analogique - Signal discret, échantillonnage- Signal numérique, quantification
B) Problèmes liés à l'échantillonnage - Choix de la période d'échantillonnage Te
- Réalisation pratique d'un échantillonneur - Reconstitution du signal, théorème de Shannon ( condition de Nyquist)
. Cas d'un signal sinusoïdal . Cas d'un signal à spectre borné . Signal à spectre non borné, perte d'information, filtre anti-repliement . L'échantillonneur bloqueur
C) Reconstruction pratique d'un signal analogique à partir d'échantillons- Problème lié à la causalité- Bloqueur d'ordre 0- Bloqueur d'ordre 1
Echantillonnage et quantification d ’un signal analogique
Rappels sur la transformée de LaplaceDéfinitionLinéarité, théorème du retard, théorème de la valeur finaleImpulsion de Dirac, échelon unitéTransformée d'un peigne de Dirac
Transformée d'un signal échantillonné
Fonction de transfert d'un bloqueur d'ordre 0Détermination directeDétermination par la réponse impulsionnelleRéponse fréquencielle
Fonction de transfert d'un bloqueur d'ordre 1
Transformée de Laplace d'un signal échantillonné
A) Systèmes invariant, linéaire et causal (L.I.C.) initialement aux repos
B) Signaux discrets particuliers- Impulsion unité- Saut unité- Sinusoïde - Exponentielles
C) Systèmes de traitement L.I.C.- Opérations de base et équation de récurrence d'un système L.I.C.- Cas d ’un système du premier ordre- Produit de convolution discrète
D) Approximation d'un système analogique linéaire par une équation aux différences.
- Dérivateur- Intégrateur- P.I.D - Produit de convolution
Traitement des signaux discrets.
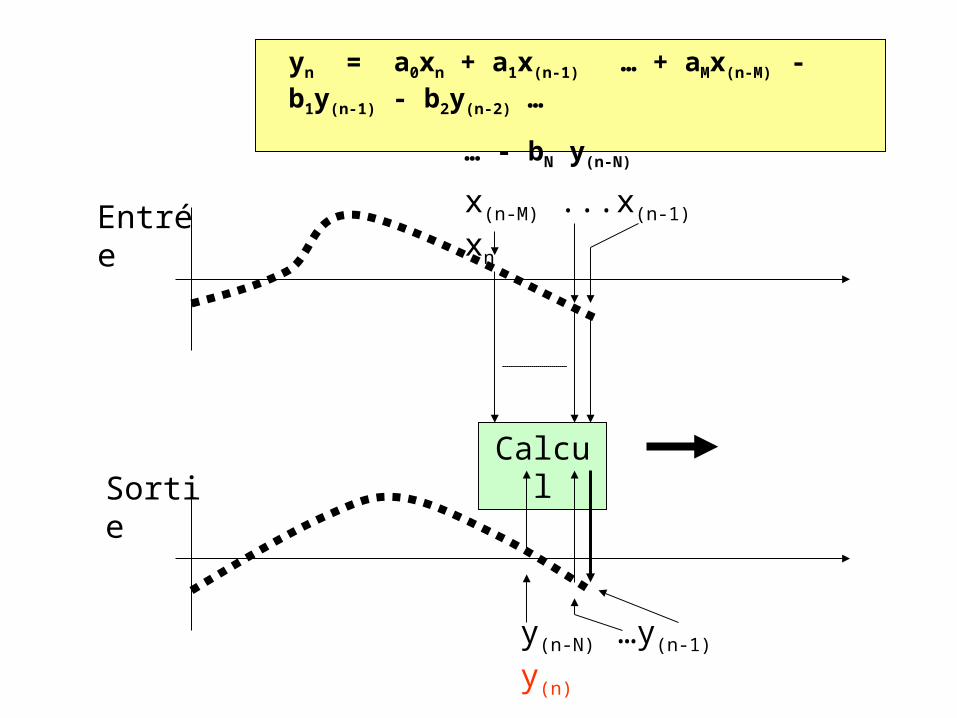
yn = a0xn + a1x(n-1) … + aMx(n-M) - b1y(n-1) - b2y(n-2) …
… - bN y(n-N)
Entrée
SortieCalcul
x(n-M) ...x(n-1) xn
y(n-N) …y(n-1) y(n)
A) Définitions et propriétés (rappels) - X(z) = Σ x(n).z-n avec z = exp (p.Te) - Linéarité - Signal retardé - Différence et dérivée
- Somme et intégration - Théorème de la valeur initiale - Théorème de la valeur finale - Produit de convolution
B) Transformée de signaux particuliers- Impulsion unité- Saut unité- Table de transformée
C) Transformé inverse- par division - décomposition en éléments simple + tables- Méthode des résidus
Transformée en Z d ’un signal échantillonné. (Rappels)
Trouver un modèle mathématique du processus à contrôler
A) A partir des lois physiques (modèle de connaissance)
- Exemples- Remarques
B) A partir d ’observations sur le comportement (modèle de représentation)- Modèle mathématique dont on ajuste les coefficients- Quelques méthodes classiques
réponse impulsionnelle (peu utilisée)réponse indicielleréponse harmoniqueréponse à une SBPA
Identification d ’un processus
- Fonction de transfert en z d'un système L.I.C - Equation de récurrence - Réponse impulsionnelle - Exemple yn =xn -0.5.xn
- Ordre, pôles et zéros
- Stabilité B.I.B.O ( entrée bornée, sortie bornée)
- Position des pôles et stabilité Ex: yn =xn -a.xn
- Correspondance entre le plan des "p" et celui des "z"-Réponse fréquentielle et position des pôles et des zéros
- Critère de Jury
Stabilité des systèmes échantillonnés
- Critère de Routh avec le changement de variable W = z-1/z+1
- Lieu des racines (lieu d'Evans)
- Stabilité en boucle fermée à partir de l'étude en boucle ouverte
Critère du contour de NyquistCritère de Nyquist simplifié (critère du revers )
- Instabilités cachées
- Transformée en z modifiée
Stabilité des systèmes échantillonnés(suite)
A) Calcul de l'erreur permanente d'un système bouclé- Utilisation du théorème de la valeur finale
B) Erreur de position- Définition- Cas où le système en boucle ouverte a 1 pôle en Z = 1- Cas ' ’ n'a pas de pôle en Z = 1
C) Erreur de vitesse- Définition- Cas où système en boucle ouverte a 1 pôle double en Z = 1- Cas ' ' a 1 pôle simple en Z = 1- Cas ' n'a pas de pôle en Z = 1
D) Erreur d'accélération- Définition- Cas où le système en boucle ouverte a 1 pôle triple en Z = 1- Cas' ' 1 double en Z = 1- Cas' ' 1 pôle simple ou n'a pas de pôle en Z = 1
Précision en régime permanentdes systèmes échantillonnés
A) Les P.I.D. P.I2.D. P.I3.D….
B) Le prédicteur de Smith
C) Correcteur à simulation interne
D) Correcteur par retour d'états
E) Correcteur polynomial R.S.T.
F) Correcteur à commande linéaire quadratique L.Q.I.
G) Utilisation de la logique floue.
H) Les régulateurs auto-adaptatifs.
Les principaux circuits de réglage