Vitesse de Convergence et Technologiet2m.univ-paris1.fr/fr/activites/attach/speed.pdf · ¡–...
24
Vitesse de Convergence et Technologie St´ ephane Adjemian * F´ evrier, 2002 (Version incompl` ete ) R´ esum´ e Ce papier propose d’estimer, sur une large coupe d’´ economies, la vi- tesse de convergence (ou de divergence) du produit par travailleur et du stock de capital par tˆ ete. On interpr` ete une diff´ erence entre ces deux me- sures comme le signe qu’un ph´ enom` ene de rattrapage technologique est `a l’oeuvre et que l’accumulation de facteur ne peut `a elle seule expliquer la dynamique de croissance. Nous utilisons la th´ eorie des processus presque int´ egr´ e pour estimer la vitesse de convergence en utilisant la dimension panel de notre ´ echantillon. Abstract This paper intends to estimate, on a large cross-section of economies, the speed of convergence of output per worker and of capital per worker. The difference between these two measures allows us to pin down the role of technology in growth dynamics and confirms that capital accumulation can’t be the only engine of growth. We use local to unity asymptotic in order to estimate the speed of convergence, exploiting the panel dimension of our sample. Keywords : Local to unity asymptotic, Linear panel data, Speed of conver- gence, Neoclassical versus technological catch-up. JEL codes : C31, C32, C33, O4 and O5. Introduction Ce papier propose une proc´ edure d’estimation de la vitesse de convergence pour une large coupe d’´ economies. Diff´ erentes strat´ egies peuvent ˆ etre emprunt´ ees. Une approche classique essentiellement li´ ee aux r´ egressions en coupes. Ou de, fa¸con plus naturelle, une approche qui utilise pleinement la dimension tempo- relle des donn´ ees. Ce papier exploite cette derni` ere voie. Mˆ eme si les discussions sur la mesure de la vitesse de convergence semblent * EPEE, Universit´ e d’ ´ Evry, D´ epartement d’´ economie, 4 Bld. Fran¸cois Mitterrand, 91025 ´ Evry cedex. Tel : (33) 01-69-47-71-68. Fax : (33) 01-69-47-70-50. E-mail : [email protected] 1
Transcript of Vitesse de Convergence et Technologiet2m.univ-paris1.fr/fr/activites/attach/speed.pdf · ¡–...

Vitesse de Convergence et Technologie
Stephane Adjemian∗
Fevrier, 2002(Version incomplete)
Resume
Ce papier propose d’estimer, sur une large coupe d’economies, la vi-tesse de convergence (ou de divergence) du produit par travailleur et dustock de capital par tete. On interprete une difference entre ces deux me-sures comme le signe qu’un phenomene de rattrapage technologique est al’oeuvre et que l’accumulation de facteur ne peut a elle seule expliquer ladynamique de croissance. Nous utilisons la theorie des processus presqueintegre pour estimer la vitesse de convergence en utilisant la dimensionpanel de notre echantillon.
Abstract
This paper intends to estimate, on a large cross-section of economies, thespeed of convergence of output per worker and of capital per worker. Thedifference between these two measures allows us to pin down the role oftechnology in growth dynamics and confirms that capital accumulationcan’t be the only engine of growth. We use local to unity asymptotic inorder to estimate the speed of convergence, exploiting the panel dimensionof our sample.
Keywords : Local to unity asymptotic, Linear panel data, Speed of conver-gence, Neoclassical versus technological catch-up.JEL codes : C31, C32, C33, O4 and O5.
Introduction
Ce papier propose une procedure d’estimation de la vitesse de convergence
pour une large coupe d’economies. Differentes strategies peuvent etre empruntees.
Une approche classique essentiellement liee aux regressions en coupes. Ou de,
facon plus naturelle, une approche qui utilise pleinement la dimension tempo-
relle des donnees. Ce papier exploite cette derniere voie.
Meme si les discussions sur la mesure de la vitesse de convergence semblent
∗EPEE, Universite d’Evry, Departement d’economie, 4 Bld. Francois Mitterrand,91025 Evry cedex. Tel : (33) 01-69-47-71-68. Fax : (33) 01-69-47-70-50. E-mail :[email protected]
1

souvent peu interessantes, la recherche d’une juste mesure paraıt essentielle
dans la confrontation des constructions theoriques aux donnees. La motivation
de l’introduction du capital humain dans le modele de croissance neoclassique
(Mankiw, Romer et Weil [9], MRW) est basee sur l’incoherence constatee entre
une vitesse generalement proche de deux pour cent (obtenue par des regressions
en coupe) et la vitesse de convergence obtenue en calibrant le modele de crois-
sance neoclassique (approximativement huit pour cent).
Ce papier montre comment la comparaison de la vitesse de convergence
du stock de capital par tete et du produit par tete peut donner des elements
de reflexion dans le debat sur les sources de la dynamique de croissance (ou
de convergence). Si la vitesse de convergence du stock de capital intensif est
differente de celle du produit par tete, alors cela indique que le mecanisme
neoclassique (lie a l’accumulation du capital physique) ne peut a lui seul cau-
ser la convergence et cela laisse une place a l’explication technologique de la
convergence (Cf Abramovitz [1]). La vitesse de convergence est un moment de
la dynamique de croissance qui peut nous aider a discriminer entre des alterna-
tives theoriques.
La section [1], decrit l’ensemble des hypotheses implicitement formulees par
l’approche adoptee ici en expliquant pourquoi il peut etre interessant de com-
parer la vitesse de convergence du produit par tete et celle du capital par tete.
La section [2] motive et presente la strategie utilisee pour mesurer la vitesse
de convergence. On montre en particulier que l’approche classique, meme si
l’on admet les hypotheses qu’elle pose sur les donnees, ne peut fournir un test
convergent de la vitesse de convergence ni a fortiori une mesure de la vitesse de
convergence. La section [3] propose des applications empiriques.
1 Un cadre theorique
On se donne un modele de croissance optimal neo-classique augmente d’une
dynamique de rattrapage technologique exogene. Ceci nous permet de montrer
que, sous certaines conditions, la comparaison de la vitesse de convergence du
2

capital par tete et celle du produit par tete peut mettre en evidence l’exis-
tence, au cote de l’explication neoclassique, d’une explication technologique de
la convergence.
La technologie de production est de type neoclassique, le produit, Y (t),
est obtenu a partir du capital, K(t) et du travail efficace T (t)L(t) : Y (t) =
A(t)F (K(t), T (t)L(t)). T (t) represente le progres technologique Harrod-neutre,
on pose T (t) = ext avec x > 0 le taux de croissance technologique exogene.
L(t) represente le nombre de travailleurs a l’instant t, on pose L(t) = ent avec
n > 0 le taux de croissance exogene de la force de travail. Le terme A(t) ∈]0, 1]
represente la productivite, assimilee ici a la distance a la frontiere technologique
definie par F (•, •). Ce terme de productivite est caracterise par une dynamique
de rattrapage exogene, ie A = φ(1−A(t)). Le parametre φ > 0 defini la vitesse
de rattrapage technologique, Une plus grande valeur de ce parametre se traduit
par une reduction du temps que mettra l’economie pour combler son retard tech-
nologique. Pour caracteriser la technologie de production on pose α(t) et ε(t)
respectivement la part du capital dans la valeur ajoutee et l’elasticite entre ca-
pital et travail (voir l’annexe [A] pour une definition formelle de ces parametres).
L’utilite intertemporelle est definie par,
∫ ∞
0
e−(ρ−n)tu(c(t))dt
ou u(•) est une fonction d’utilite instantanee verifiant les proprietes habituelles
et c(t) et la consommation par travailleur. Pour caracteriser les preferences on
pose σ(t) l’inverse de l’elasticite de substitution intertemporelle.
Le programme du planificateur social associe a ce modele est defini par,
Max{c(t),t∈R}
∫ ∞
0
e−(ρ−n)tu(c(t))dt (1.1)
sc k(t) = A(t)F (k(t), T (t))− (δ + n)k(t)− c(t) (1.2)
A(t) = φ(1−A(t)) (1.3)
k(0), A(0) et T (0) donnes. (1.4)
3

ou k(t) et δ sont respectivement le stock de capital par travailleur a l’instant t et
le taux de depreciation du capital. Ce modele est caracterise par deux variables
d’etats (A(t) et k(t)) et une variable de controle (c(t)). La dynamique linearisee
autour de l’etat stationnaire de cette economie doit donc etre caracterisee par
deux valeurs propres negatives et une valeur propre explosive. Les deux valeurs
propres negatives sont liees a la vitesse de convergence neoclassique (λ1) et la
vitesse de convergence technologique (λ2). Comme le processus de convergence
technologique est independant du processus de convergence neoclassique, il est
assez naturel de trouver,
λ1 = −ξ
2+
12
√ξ2 +
4(1− α)σε
(ρ + σx + δ)[ρ + σx + δ
α− δ − x− n
](1.5)
ou ξ ≡ ρ− n− (1− σ)x, et
λ2 = φ (1.6)
Autour de l’etat stationnaire, la dynamique des variables d’etat est decrite par,
A(t) = e−λ2tA(0) et k(t) = e−λ1tk(0) (1.7)
ou A(t) ≡ A(t)− 1 et k(t) = logk(t)− logk∗ representent respectivement l’ecart
a l’etat stationnaire de la productivite et du stock de capital par unite de travail
efficace. On deduit la dynamique du produit dans un voisinage de l’etat station-
naire a partir de la dynamique des variables d’etat. La vitesse de convergence du
produit, notee β, va etre comprise entre la vitesse de convergence neoclassique
(λ1) et la vitesse de convergence technologique (λ2). Toujours en linearisant la
dynamique autour de l’etat stationnaire, on a
y(t) = A(t) + α(t)k(t)
⇐⇒ y(t) = α(t)e−λ1tk(0) + e−λ2tA(0) (1.8)
On ne peut definir la vitesse d’ajustement du produit a sa cible independamment
raisons qui expliquent l’ecart initial entre le produit et sa cible de long terme
(cette distance doit-elle s’expliquer par un niveau de capital trop faible ou par
4

une incapacite a exploiter efficacement la technologie ?). Ce point apparaıt deja
dans Den Haan [6] qui utilise un modele de croissance stochastique. Le parametre
β, la vitesse de convergence du produit, est une combinaison non lineaire de λ1
et λ2. Par definition on a,
y(t) = e−βty(0)
⇐⇒ y(t) = e−βt{
α(0)k(0) + A(0)}
On a donc, pour tout instant t,
e−βt{
α(0)k(0) + A(0)}
= α(t)k(0)e−λ1t + A(0)e−λ2t
En particulier, pour t = 1, on a
e−β =α(1)k(0)e−λ1 + A(0)e−λ2
α(0)k(0) + A(0)
Soit encore,
β = −log
(α(1)k(0)e−λ1 + A(0)e−λ2
α(0)k(0) + A(0)
)(1.9)
Si l’ecart initial du produit a sa cible de long terme s’explique exclusivement par
un niveau de capital insuffisant (A(0) = 0) et si la technologie est Cobb-Douglas
(ce qui assure que la part du capital dans la valeur ajoutee est constante) alors
la vitesse de convergence de l’output correspond a la vitesse de convergence
neo-classique. On verifie que β est compris entre λ1 et λ2.
Pour la calibration du modele decrite dans le tableau [1] avec α = 1/3 on ob-
tient une vitesse de convergence neo-classique de 8,9%, il faudrait poser α = 3/4
pour obtenir une vitesse de 2,1% coherente avec les estimations regulierement
reportees dans les regressions en coupe. Mais ici la vitesse de convergence du
produit ne correspond pas a la vitesse de convergence du capital. Avec α = 1/3
on peut obtenir une vitesse de convergence du produit de 2,1% si A(0) = 0, 19
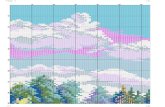
et k(0) = 0, 1. La figure [1] represente, pour la calibration avec α = 1/3, la
vitesse de convergence du produit contre les conditions initiales associees aux
deux variables predeterminees du modele.
5

Pour la suite, on retient trois points remarquables,
1. La vitesse de convergence du produit ne correspond plus a la vitesse de
convergence du capital des lors que l’on a une dynamique de productivite.
Si nous mesurons une difference entre ces deux vitesses de convergence
alors cela laisse une place pour le mecanisme de convergence technologique.
Ce resultat apparaıt des lors que la dynamique du modele est augmentee
d’une variable predeterminee (endogene ou exogene).
2. Dans ce cadre il n’est pas necessaire d’introduire du capital humain pour
obtenir une vitesse de convergence du produit autour de 2% compatible
avec une part du capital dans la valeur ajoutee de 1/3. Il suffit d’avoir
une dynamique de la productivite assez persistante (φ proche de zero). Ce
point a deja ete observe par [6].
3. Meme si les fondamentaux sont identiques dans la coupe des economies,
le modele predit une heterogeneite sur la vitesse de convergence du pro-
duit, a cause de l’heterogeneite sur les sources de la deviation initiale du
produit a sa cible. Supposer que la vitesse de convergence du produit est
constante dans la coupe des economies, comme nous le ferons par la suite,
c’est supposer que l’ecart initial du produit a sa cible s’explique de facon
semblable pour toutes les economies (au regard de la figure [1] cela revient
a supposer que toutes les economies sont reparties le long de la courbe de
niveau associee a une vitesse de convergence particuliere.
2 Approche empirique
2.1 Limites de l’approche classique
L’approche classique suppose que le produit par tete relatif en logarithme,
yi,t = log(Yi,t) − N−1∑
i log(Yi,t), de l’economie i (= 1, . . . , N) a la date t
6

(= 1, . . . , T ) est determine par le processus generateur de donnees suivant,
yi,t = (1− β)yi,t−1 + ui,t (2.1)
ui,t ∼ iid(0, σ2u) dans la coupe et dans la chronologie (2.2)
yi,0 ∼ iid(0, σ2y) et E[yi,0uj,t] = 0 ∀(i, j, t) ∈ {1, . . . , N}2 × N (2.3)
β ≥ 0 (2.4)
Le parametre β s’interprete comme la vitesse de convergence. Avec ce proces-
sus generateur de donnees on se limite au cas de la convergence absolue1. Les
promoteurs de l’approche classique proclament que l’on peut estimer la vitesse
de convergence en estimant une equation en coupe de la forme2,
gi,T = byi,0 + vi,T (2.5)
ou gi,T ≡ yi,T−yi,0 est le taux de croissance du produit relatif. On note bT,N l’es-
timateur des moindres carres ordinaires dans l’equation [2.5]. Cette procedure
ne peut fournir un estimateur non biaise de la vitesse de convergence que si
les economies croissent le long du sentier de croissance equilibree mondiale a la
date T . Nous savons qu’une economie ne rejoint son etat stationnaire qu’asymp-
totiquement, si on veut montrer que la regression en coupe [2.5] fournit une
estimation convergente de la vitesse de convergence alors on doit se donner
une asymptotique dans les dimensions individuelle (N → ∞) et chronologique
(T →∞).
Proposition 2.1. Si β 6= 0 et si les donnees sont generees conformement
a [2.1], [2.2], [2.3] et [2.4], alors bT,N fournit un estimateur convergent du
parametre β lorsque (T,N) → ∞. Sous ces memes conditions, on a le resultat
asymptotique suivant,
√N (bT,N − b) =⇒
(T,N)→∞N
(0,
σ2u/σ2
y
1− (1− β)2
)(2.6)
Preuve. Voir l’annexe [B]
Cette proposition nous dit qu’il est possible d’estimer le parametre autoregressif
dans [2.1] de facon convergente en resumant la dynamique du produit relatif par
7

son taux de croissance. La regression en coupe nous permet d’estimer la vitesse
de convergence si les economies convergent. Ce resultat est extremement fragile
car les hypotheses formulees sur le processus generateur des donnees sont fortes.
Par exemple, une version stochastique linearisee du modele presente en section
[1] viole ces conditions (voir [6]). Enfin, l’ecriture de la distribution asympto-
tique nous permet de voir que l’estimation est d’autant moins precise que la
vitesse de convergence est faible. Dans l’annexe [B] on voit que l’estimateur en
panel ne partage pas cette propriete asymptotique (il est d’autant plus precis
que la vitesse de convergence est faible
Quelques auteurs se sont attaches a comparer les merites respectifs du pa-
nel et de la cross-section. Shioji [16] affirme que l’approche par la regression
en coupe est preferable dans le sens ou elle permet, contrairement a une ap-
proche en panel (on note bT,N l’estimateur associe), de controler l’effet du cycle
caracterisant les donnees (et qui est sans rapport avec la definition de la vi-
tesse de convergence d’une economie vers son etat stationnaire). Cet argument
est plutot deconcertant. En effet, si les donnees sont caracterisees par du cycle
alors il y a incoherence avec le processus generateur des donnees [2.1] a [2.4]
suppose par l’approche classique, car un processus autoregressif d’ordre un ne
saurait reproduire du cycle. Shioji assimile, de facon contestable d’un point de
vue statistique, cette erreur de specification a une erreur de mesure et montre
que l’estimateur en panel est d’autant moins biaise face a des erreurs de mesure
que l’on retire des observations dans la chronologie du panel. Ainsi, la regression
en coupe, qui ne considere que les conditions initiale et terminale du panel, ap-
paraıt moins influencee par cette source de biais. La proposition suivante etablit
un resultat asymptotique qui confirme l’idee, mal fondee, de Shioji. Avant d’ex-
poser ce resultat nous posons les hypotheses suivantes sur la perturbation {ui,t},
H1 (i) ui,t = Ci(L)εi,t =∑∞
i=1 Ci,jεi,t−j , (ii) εi,t sont identiquement et
independamment distribues dans la coupe et la chronologie, avec E[εi,t] =
0, E[ε2i,t] = 1 et E[ε4i,t] = σ4, (iii) {Ci,j} est une suite de reels verifiant
Cj ≡ supi |Ci,j | < ∞ et∑∞
j=0 jbCj < ∞ pour b ≥ 0.
H2 (i) ω2 = limN→0
N−1∑N
i=1 ω2i < ∞, ou ω2
i = Ci(1)2 est la variance de
8

long terme, (ii) Φ = limN→0
N−1∑N
i=1 ω2i < ∞ mesure la variabilite dans la
coupe des variances de long terme, (iii) λ2 = limN→0
N−1∑N
i=1 λ2i < ∞, ou
λ2i =
∑∞h=1 E[ui,0ui,h]. La variance associee a la perturbation {ui,t} s’ecrit
alors ω2i − 2λ2
i .
Ces hypotheses sont assez generales pour autoriser la presence de cycle (contrai-
rement a la modelisation proposee par [16]).
Proposition 2.2. Si β 6= 0, si les donnees sont generees conformement a [2.1],
[2.3] et [2.4], et si la perturbation {ui,t} verifie les hypotheses H1 et H2 alors
bT,N fournit un estimateur convergent du parametre β mais pas bT,N .
Preuve. Voir l’annexe [B]
La difference asymptotique obtenue face a la distance entre le DGP de l’ap-
proche classique et les donnees s’explique par le fait que la regression en coupe
n’exploite pas reellement la structure AR(1) contrairement a l’estimateur en
panel et n’est donc pas directement soumis au biais de mauvaise specification.
Au total la regression en coupe pourrait sembler interessante. Cependant sa
facon grossiere de resumer la dimension temporelle caracterisant la dynamique
de la distribution du produit par tete ne permet pas de mettre en oeuvre un
test de convergence. La proposition suivante etablit ce point,
Proposition 2.3. Si β = 0 et si les donnees sont generees conformement a
[2.1], [2.2], [2.3] et [2.4], alors bT,N ne fournit un estimateur convergent du
parametre β lorsque (T, N) →∞, contrairement a bT,N . Sous ces memes condi-
tions, on a le resultat asymptotique suivant,
√N
TbT,N =⇒ N
(0,
σ2u
σ2y
)(2.7)
Preuve. Voir l’annexe [B]
Lorsque les economies divergent l’estimateur bT,N ne converge pas vers zero.
Puisque bT,N ∼ Op(T12 ), il est possible d’estimer une vitesse de convergence
strictement positive alors que les economies divergent. Ce resultat est evidemment
lie au phenomene de regression specieuse (Phillips [10]). La strategie exploitant
9

pleinement le panel ne souffre pas du defaut caracterisant la regression en coupe,
on a meme un resultat de super-convergence (dans la dimension temporelle) de
l’estimateur de la vitesse de convergence.
Finalement, l’approche par la regression en coupe pour mesurer la vitesse de
convergence des economies n’est pertinente que dans la mesure ou l’on a un a
priori fort : les economies doivent effectivement converger. Pour cette raison il
ne semble pas raisonnable de travailler sur cette base. L’usage de l’estimateur
en panel, dans le cadre de l’approche classique, ne semble pas preferable car
meme s’il fournit une estimation convergente (pour toutes les valeurs de β), il
faut poser des hypotheses importantes sur le processus generateur des donnees
(les perturbations doivent etre iid).
2.2 Une approche alternative
Evans [4] propose une autre procedure pour estimer la vitesse de conver-
gence. Il exploite pleinement la dimension temporelle et suppose que les donnees
sont generees par un processus autoregressif d’ordre p. Dans cette section nous
montrons en quoi son approche n’est pas totalement satisfaisante et proposons
quelques modifications. En particulier nous montrons que l’objet mesure par
Evans ne peut s’interpreter comme une vitesse de convergence.
Pour Evans et karras [5] ou Evans [4], les economies convergent absolument
si elles gravitent (ou ont tendance a graviter) autour d’une unique tendance
commune. Ainsi l’hypothese de convergence d’un ensemble de N economies
peut s’ecrire sous la forme de N − 1 relations de cointegration lineairement
independantes. Par exemple en considerant les ecarts de produit par tete entre
N − 1 economies et une economie leader (les Etats unis). [5], [4] considerent
les deviations du produit par tete (en log) au produit par tete (en log) moyen
dans la coupe des economies. Ils associent la convergence des N economies a la
stationnarite du produit par tete relatif. Ainsi on voit que cette definition de la
convergence generalise la definition donnee dans la section [2.2].
Il est important de noter que, par construction, pour un echantillon de N
economies on ne peut avoir stationnarite du produit relatif pour N−p economies
10

et non stationnarite pour p economies (0 < p < N). Il suffit qu’une seule
economie diverge pour que le produit relatif soit non stationnaire pour toutes
les economies. Cette representation contraint les N−1 relations de cointegration
a etre simultanement realisees.
Si E [yi,t] 6= E [yi′,t] alors la convergence est qualifiee de conditionnelle, un choc
sur l’ecart de log Yi,t a sa cible de long terme log Y .,t + E [yi,t] n’a pas d’effet
permanent. La vitesse de convergence correspond a la vitesse de retour de yi,t
a son niveau de long terme E [yi,t].
Evans [4] caracterise parametriquement le processus {yi,t; i = 1, . . . , N et
t = 1, . . . , T} en supposant qu’il s’agit d’un processus AR(p) specifique a chaque
economie. Il montre que la plus grande racine du polynome retard correspond
a la vitesse de convergence et propose donc l’estimateur suivant de la vitesse de
convergence,
(1− (1− βi))Ai(L)yi,t = δi + εi,t (2.8)
ou Ai(L) est un polynome autoregressif d’ordre (p − 1), δi/Ai(1) correspond
au niveau de long terme de l’economie i, εi,t est un choc iid(0,σ2i ) dans les di-
mensions temporelle et individuelle. Dans ce cadre la vitesse de convergence est
specifique a chaque economie. Evans reporte des estimations ou, au sein d’un
meme echantillon, certaines economies ont une vitesse de convergence negative
(divergence), d’autres une vitesse de convergence positive. Ces resultats contre-
disent la representation de la convergence employee ici (Cf infra). Des estima-
tions reportees par Evans il ressort que log Y .,t ne peut s’interpreter comme la
tendance commune dirigeant la dynamique de croissance mondiale (ou regionale
dans le cas des etats americains). Ainsi les parametres βi ne peuvent pas s’in-
terpreter comme des vitesses d’ajustement (ou de convergence) vers des sentiers
de croissance reguliere paralleles. L’approche proposee par Evans aurait plus de
sens si elle reposait sur un espace de cointegration coherent avec l’approche indi-
viduelle qu’elle adopte. Plutot que de tester individuellement la presence d’une
racine unitaire dans le produit par tete relatif, on pourrait tester la presence
d’une racine unitaire dans les deviations du produit par tete a celui des Etats
Unis (c’est-a-dire ne pas contraindre les N − 1 relations de cointegration a tenir
simultanement). Les N − 1 economies convergent si pour les N − 1 ecarts aux
11

Etats Unis on rejette la presence d’une racine unitaire. Dans ce cas on peut
conclure a la divergence (relativement aux Etats unis) de certaines economies,
mais le parametre βi s’interprete toujours comme une vitesse de convergence
(pour les economies qui convergent).
Dans ce papier nous choisissons plutot une approche en panel en supposant
que la plus grande racine (lie a la vitesse de convergence) est commune dans
la coupe des economies. Comme Evans [4] on utilise l’asymptotique des proces-
sus presque integre pour corriger l’estimateur de la vitesse de convergence des
biais asymptotiques qui l’affecte eventuellement et construire un intervalle de
confiance (voir l’annexe [C] pour une introduction a l’asymptotique des proces-
sus presque integre et pour une description de la methode utilisee ici).
Nous adoptons un processus generateur des donnees plus general que celui
envisage par Evans (a part l’hypothese sur la vitesse de convergence) en ne
specifiant pas une forme parametrique pour le produit par tete relatif,
yi,t = δi + γit + zi,t (2.9)
zi,t = αzi,t−1 + εi,t (2.10)
ou α = ecT ≈ 1 + c
T ∼ 1 + o(1), εi,t est un processus lineaire stationnaire
verifiant les hypotheses H1 et H2. On suppose de plus que supi E[z2i,0] < ∞.
Les economies convergent si c < 0 et γi = γj = 0. Le parametre δi s’interprete
comme le niveau de long terme relatif de l’economie i. La vitesse de convergence
est donnee par β = 1 − α. Phillips et Moon [14] montrent comment estimer le
parametre de localisation c de facon convergente, comment associer un intervalle
de confiance a ce parametre Tβ = −c et comment construire un intervalle de
confiance pour chaque parametre de la partie deterministe du processus (Cf
annexe C).
12

3 Applications
Dans cette section nous mettons en oeuvre la strategie d’estimation de la
vitesse de convergence. On commence par etudier le cas des etats americains
afin de comparer notre approche avec celle proposee par Evans [4]. Puis nous
travaillons sur un echantillon de 50 economies observees de 1965 a 1990 (les
donnees dont extraites des Penn World Tables de Summers et Heston [17])
pour lesquelles nous disposons d’informations sur le produit par travailleur et
le stock de capital par travailleur.
3.1 Vitesse de convergence des etats americains
< A completer >
3.2 Un role pour la technologie
< A completer >
13

Notes
1Cette restriction simplifie l’expose, plus generalement cela revient a sup-poser que l’economiste qui adopte l’approche classique de la convergence peutparfaitement controler l’heterogeneite des etats stationnaires. Il s’agit d’une hy-pothese assez peu vraisemblable, si elle n’est pas verifiee alors les estimateursenvisages par cette approche sont biaises (biais de variable omise).
2Il est inutile d’inclure une constante dans la regression puisque par construc-tion les variables explique et explicative somment a zero. Notons que cette pro-priete entraıne une correlation artificielle, dans la dimension individuelle, entreles perturbations (qui elles aussi doivent sommer a zero). Cette propriete nenous gene pas ici car la correlation disparaıt lorsque N tend vers l’infini et n’adonc pas d’influence asymptotiquement.
References
[1] Moses Abramovitz. Catching-up, forging ahead and falling behind. Journalof Economic History, 46 :385–406, 1986.
[2] Stephane Adjemian. Convergence des productivites europeennes : Tran-sition, rupture et racine unitaire. mimeo, EPEE, Universite d’Evry - Vald’Essonne, Janvier 2002.
[3] In Choi and Byung Chul Ahn. Testing the null of stationarity for multipletime series. journal of Econometrics, 88 :41–77, 1999.
[4] Paul Evans. How do fast economies converge. Review of Economics andStatistics, 79 :219–225, 1997.
[5] Paul Evans and Georgio Karras. Convergence revisited. Journal of Mone-tary Economics, 37 :249–265, 1996.
[6] Wouter J. den Haan. Convergence in stochastic growth models : the im-portance of understanding why income levels differs. Journal of MonetaryEconomics, 35 :65–85, 1995.
[7] Ioannis Karatzas and Steven E. Shreve. Brownian Motion and StochasticCalculus. Springer, New York, 1991.
[8] Daniel Kwiatkowski, Peter C.B. Phillips, Peter Schmidt, and YoungcheolShin. Testing the null hypothesis of stationarity against the alternative ofa unit root : How sure are we that economic time series have a unit root ?Journal of Econometrics, 54 :159–178, 1992.
[9] N.Gregory Mankiw, David Romer, and David N. Weil. A contribution tothe empirics of economic growth. Quaterly Journal of Economics, 107 :407–437, 1992.
[10] Peter C.B. Phillips. Understanding spurious regressions in econometrics.Journal of Econometrics, 33 :311–340, 1986.
[11] Peter C.B. Phillips. Time series regression with a unit root. Econometrica,55 :277–301, 1987.
[12] Peter C.B. Phillips. Towards a unified asymptotic theory of autoregression.Biometrica, 74 :535–548, 1987.
14

[13] Peter C.B. Phillips. Regression theory for near-integrated time series. Eco-nometrica, 56 :1021–1043, 1988.
[14] Peter C.B. Phillips and Hyungsik Moon. Estimation of autoregression rootsnear unity using panel data. Discussion paper, Yale University, January1999.
[15] Peter C.B. Phillips, Hyungsik Moon, and Zhijie Xiao. How to estimateautoregressive roots near unity. Discussion paper, Yale University, July1998.
[16] Etsuro Shioji. Convergence in panel data : Evidence from the skippingestimation. Working paper, Department of Economics and Business, Uni-versitat Pompeu Fabra, August 1997.
[17] Robert Summers and Alan Heston. Penn world tables (mark 5) : An ex-panded set of international comparisons, 1950-1988. Quaterly Journal ofEconomics, 2(106) :327–368, May 1991.
0
0.05
0.1
0
0.05
0.1
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
A(0)K(0)
β
0.02 0.04 0.06 0.08 0.10.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
K(0
)
A(0)
0.02
0.02
0.03
0.03
0.03
0.04
0.04
0.04
0.05
0.05
0.06
0.06
Fig. 1 – Vitesse de convergence du produit et conditions initiales. Surla gauche on peut voir la vitesse de convergence du produit en fonction desconditions initiales sur l’efficience et sur le capital. Le graphique sur la droiterepresente les courbes de niveau associees.
15

n x φ σ α ε δ ρ0,01 0,02 0,01 1,5 ? 1 0,05 0,02
Tab. 1 – Valeurs des parametres pour la calibration. Pour ces valeurs onobtient un taux d’interet reel de 5% a l’etat stationnaire.
16

Annexes
A Resolution et linearisation du modele
En ecrivant le Hamiltonien associe au programme du planificateur social etles conditions de Pontryagin, on obtient rapidement la dynamique des variablespar travailleur sous la forme d’une systeme de trois equations,
c(t) = c(t)σ(t)−1 [A(t)F1(k(t), T (t))− δ − ρ]k(t) = A(t)F (k(t), T (t))− (δ + n)k(t)− c(t)A(t) = φ(1−A(t))
(A.1)
En posant k(t) = k(t)/T (t) et c(t) = c(t)/T (t) les variables “detrendees” duprogres technologique, on peut reecrire la dynamique [A.1] de la facon suivante,
˙c(t) = c(t){
σ(t)−1[A(t)F1(k(t), 1)− δ − ρ
]− x
}
˙k(t) = A(t)F (k(t), 1)− (δ + n + x)k(t)− c(t)A(t) = φ(1−A(t))
(A.2)
L’etat stationnaire de cette dynamique est defini par,
c∗ = F(k∗, 1
)− (δ + n + x)k∗
F1
(k∗, 1
)= σx + ρ + δ
A∗ = 1
(A.3)
On verifie facilement que la contrainte de transversalite est verifiee des lors quel’inegalite suivante est verifiee,
ρ− n > (1− σ)x (A.4)
La dynamique linearisee autour de l’etat stationnaire s’ecrit sous forme matri-cielle de la facon suivante,
˙k(t)˙c(t)˙A(t)
=
ρ− n− (1− σ)x − c∗
k∗1k∗
F2
(k∗, 1
)
k∗σ−1F11
(k∗, 1
)0 σ−1F12
(k∗, 1
)
0 0 −φ
k(t)c(t)A(t)
(A.5)
Le polynome caracteristique associe a la dynamique linearisee peut s’ecrire dela facon suivante,
χ(κ) = (κ + φ)P (κ) (A.6)
avecP (κ) = κ2 − κξ + c∗σ−1F11
(k∗, 1
)
et ξ defini dans la section [1]. On note κ2 la racine negative liee a la convergencetechnologique, κ2 = −φ. On montre que les racines du polynome P (κ) sont designes opposes, κ0 > 0 et κ1 < 0. En effet, on a,
κ0 + κ1 = ρ− n− (1− σ)x > 0 (A.7)
κ0κ1 = c∗σ−1F11
(k∗, 1
)< 0 (A.8)
17

L’inegalite [A.7] est necessaire, sinon on viole la condition de transversalite (par[A.4]). L’inegalite [A.8] vient de la convexite de l’ensemble de production. κ1
correspond donc a la vitesse de convergence neo-classique liee a l’accumulationdu capital. Le discriminant associe au polynome du second degre est donne par,
∆ = ξ2 − 4c∗σ−1F11
(k∗, 1
)> 0
En adoptant les notations suivantes pour la part du capital dans la valeur ajouteeet l’elasticite capital–travail,
α(t) =k(t)F1
(k(t), 1
)
F(k(t), 1
)
ε(t) =F1
(k(t), 1
) [F
(k(t), 1
)− k(t)F1
(k(t), 1
)]
k(t)F(k(t), 1
)F11
(k(t), 1
)
On peut alors reecrire le determinant de facon equivalente,
∆ = ξ2 + 4c∗
k∗1− α
σε(r∗ + δ)
ou r∗ est le taux d’interet a l’etat stationnaire. En notant que le ratio consom-mation – capital verifie l’egalite suivante,
c∗
k∗=
r∗ + δ
α− (δ + n + x)
On a finalement,
κ1 =ξ
2− 1
2
√ξ2 +
4(1− α)σε
(ρ + σx + δ)[ρ + σx + δ
α− δ − x− n
](A.9)
La vitesse de convergence neo-classique est donnee par λ1 = −κ1. Notons qu’ellecorrespond a la vitesse de convergence que nous obtiendrions dans un modelede croissance optimale sans dynamique de la productivite.
B Preuves & autres considerations
Preuve de la proposition 2.1 L’estimateur des moindres carres ordinairesdans la regression en coupe est donne par,
bT,N =∑N
i=1 yi,0gi,T∑Ni=1 y2
i,0
= b +∑N
i=1 yi,0εi,T∑Ni=1 y2
i,0
(B.1)
avec b = (1 − β)T − 1 et εi,T =∑T−1
h=0 (1 − β)hui,T−h. Puisque β > 0, onsait que lorsque T tend vers l’infini εi,T tend en loi vers une variable aleatoire
18

εi = limT→∞∑T−1
h=0 (1 − β)hui,T−h de moyenne nulle et de variance finie (=σ2
u/(1− (1− β)2)). On a donc lorsque T tend vers l’infini,
bT,N − b =⇒ N−1∑N
i=1 yi,0εi
N−1∑N
i=1 y2i,0
(B.2)
Puisque ui,t est une innovation, εi est necessairement independant de la condi-tion initiale yi,0. Ainsi l’esperance de yi,0εi doit etre nulle. Par la loi faible desgrands nombres on a finalement le resultat asymptotique suivant,
bT,N − bproba−−−−→N→∞
0 (B.3)
Asymptotiquement l’estimateur des MCO est normalement distribue d’esperancenulle et de variance
V∞[√
NbT,N
]=
σ2u/σ2
y0
1− (1− β)2(B.4)
D’ou le resultat annonce dans la proposition 2.1.
On montre tout aussi facilement que l’estimateur en panel, bT,N , est lui aussiasymptotiquement normalement distribue. Puisque dans ce cas on profite de ladimension temporelle, on a
√NT bT,N − b =⇒
(T,N)→∞N (
0, 1− (1− β)2)
(B.5)
On note que la variance asymptotique est maintenant une fonction croissantede la vitesse de convergence.
Preuve de la proposition 2.2 Le biais asymptotique de l’estimateur en panels’explique evidemment par le probleme d’endogeneite induit par la dependancedans la perturbation. L’absence de biais asymptotique de l’estimateur associe ala regression en coupe s’explique quant a lui par l’hypothese d’exogeneite de lacondition initiale sur le produit relatif.
On remarque que sous les memes conditions que la proposition 2.2, l’estimateurassocie a la regression en coupe est sans biais a distance finie. Ceci n’est valableque si la condition initiale est exogene, sinon l’absence de biais n’est qu’unresultat asymptotique (dans la dimension temporelle).
Preuve de la proposition 2.3 Lorsque β = 0 le taux de croissance du produitrelatif est une marche aleatoire pure. On a
bT,N =∑N
i=1 yi,0
∑T−1t=1 ui,t∑N
i=1 y2i,0
(B.6)
Ainsi lorsque la dimension temporelle tend vers l’infini,
T−12 bT,N =⇒
∑Ni=1 yi,0
∫ 1
0dWi(r)∑N
i=1 y2i,0
≡ N−1∑N
i=1 yi,0W (1)
N−1∑N
i=1 y2i,0
(B.7)
19

ou Wi(r) est le processus de Wiener obtenu en cumulant le processus ui,t. Parhypothese on a donc independance entre Wi(1) et la condition initiale, d’ou parla loi forte des grands nombre,
T−12 bT,N
proba−−−−→N→∞
0 (B.8)
et on a aussi le resultat asymptotique suivant,√
N
TbT,N =⇒ N
(0,
σ2u
σ2y
)(B.9)
par le theoreme central limit. La strategie exploitant pleinement le panel nesouffre pas du defaut caracterisant la regression en coupe, on a meme un resultatde super-convergence (dans la dimension temporelle) de l’estimateur de la vitessede convergence. En effet, on a3
bT,N =∑N
i=1
∑Tt=1 yi,t−1ui,t∑N
i=1
∑Tt=1 y2
i,t−1
T bT,N =∑N
i=1 T−1∑T
t=1 yi,t−1ui,t∑Ni=1 T−2
∑Tt=1 y2
i,t−1
=⇒ N−1∑N
i=1
∫ 1
0Wi(r)dWi(r)
N−1∑N
i=1
∫ 1
0Wi(r)2dr
(B.10)
proba−−−−→N→∞
0 (B.11)
on obtient la limite en probabilite par la loi faible des grands nombres, en notant
que E[∫ 1
0Wi(r)dWi(r)
]= 0 et E
[(∫ 1
0Wi(r)dWi(r)
)2]
= 12 .
D’ou la proposition 2.3.
C Asymptotique des processus presque integres
La litterature concernee par l’approche en serie temporelle de la conclutregulierement a la divergence, en acceptant la presence d’une racine unitaire(voir [2]). Or on sait que les tests de racine unitaire (meme si on utilise la di-mension panel) sont generalement peu puissant lorsque la plus grande racine estproche de l’unite (l’inversion de la nulle et de l’alternative, proposee par exemplepar Kwiatkowski, Phillips, Schmidt et Shin [8], n’arrange pas necessairementchoses, voir Choi et Ahn [3, page 52]). Ainsi il est possible de conclure a ladivergence des economies a tort alors que les processus de, par exemple, pro-duit en deviation au produit moyen sont stationnaires mais caracterises parune dependance importante. Phillips [12] developpe une theorie asymptotiquepour les processus presque integre, celle-ci peut s’averer utile a plus d’un titre.Premierement elle permet de faire le pont entre les theories asymptotiques desprocessus stationnaires et des processus a racine unitaire (dans le sens ou il n’ya pas de discontinuite). Deuxiemement, elle nous permet de construire un inter-valle de confiance pour la plus grande racine (supposee d’autant plus proche del’unite que la taille de l’echantillon augmente) de la dynamique. Ainsi, meme si
20

l’on accepte la presence d’une racine unitaire car un appartient a l’intervalle deconfiance, on peut observer l’etendue des autres valeurs que pourrait prendre laplus grande racine.L’objet de cette annexe est (i) de brievement presenter cette theorie en reprenantpour cela les elements donnes par Phillips [13], (ii) de presenter la procedured’estimation en panel proposee par Phillips et Moon [14].
C.1 Rappels sur les processus presque integres
Soit {ut}∞0 une suite stationnaire de variables aleatoires reelles. On definitla somme partielle St =
∑tτ=1 uτ , avec S0 = 0. On suppose que le processus
stochastique {ut}∞0 est tel que l’on puisse appliquer un theoreme central limitfonctionnel qui assure le resultat asymptotique suivant
YT (r) ≡ T−12 S[rT ] =⇒ ωW (r) ≡ B(r) (C.1)
ou r ∈ [0, 1], [x] designe la partie entiere de x, W (r) est un processus de Wienerstandard et ω2 ≡ limT→∞T−1E
[S2
T
]est la variance de long terme associee au
processus {ut}∞0 . =⇒ designe la convergence en loi lorsque T tend vers l’infini.
On s’interesse au processus defini de la facon suivante,
yt = αyt−1 + ut (C.2)
α = ecT ≈ 1 +
c
T(C.3)
ou T est la taille de l’echantillon. On voit que lorsque T tend vers l’infini, leparametre auto-regressif α tend vers l’unite, ie on se rapproche de la marchealeatoire. Le parametre c, nomme parametre de localisation, ne depend pas dela taille de l’echantillon. Si c = 0 on retrouve l’hypothese de racine unitaire.Lorsque c 6= 0, le parametre de localisation peut etre positif ou negatif, nousinteressons essentiellement au cas c < 0, car il n’y a aucune raison de penserque les processus nous interessant soient explosifs.Dans cette litterature on retrouve regulierement la fonctionnelle de processusde Wiener suivante,
Jc(r) ≡∫ r
0
e(r−s)cdW (s) ≡ W (r) + c
∫ r
0
e(r−s)cW (s)ds (C.4)
Il s’agit d’un processus gaussien d’esperance nulle et de variance∫ r
0e2(r−s)cds
(cela correspond a un processus d’Ornstein–Uhlenbeck, defini comme la solutionde l’equation differentielle stochastique dJc(r) = cJc(r)dr+dW (r), Voir [7, page358]). Par exemple, on montre facilement que T−
12 y[rT ] tend en loi vers ωJc(r)
lorsque T tend vers l’infini. En effet, nous avons,
yt = ecT yt−1 + ut
= e2cT yt−2 + ut + e
cT ut−1
= etcT y0 +
t−1∑
j=0
ejcT ut−j
= etcT y0 +
t∑
j=1
e(t−j)c
T uj (C.5)
21

Ainsi,
T−12 yt = T−
12
t∑
j=1
e(t−j)c
T uj + op(1)
=t∑
j=1
e(t−j)c
T
∫ jT
j−1T
dYT (s) + op(1)
=∫ r
0
e(r−s)cdYT (s) + op(1) (C.6)
On peut reecrire [C.6] de facon equivalente en utilisant l’integration par partie,
T−12 yt = YT (r) + c
∫ r
0
e(r−s)cYT (s)ds + op(1)
=⇒ ωW (r) + cω
∫ r
0
e(r−s)cW (s)ds ≡ ωJc(r) (C.7)
Bien sur, a la limite on retrouve le processus de wiener ωW (r) lorsque le pa-rametre de localisation est nul (il suffit de poser c = 0 dans l’equation [C.4]).Il faut se reporter a Phillips [13] pour une presentation generale des resultatsasymptotiques lies au processus presque integre. On peut alors obtenir la dis-tribution asymptotique de l’estimateur par les moindres carres ordinaires duparametre α dans le modele [C.6]. En utilisant les points (c) et (e) du lemme3.1 dans [13], on a
T (α− α) =T−1
∑Tt=1 yt−1ut
T−2∑T
t=1 y2t−1
=⇒ ω2∫ 1
0W (r)dJc(r) + λ2
ω2∫ 1
0Jc(r)2dr.
(C.8)
ou λ2 est defini comme dans H2. On retrouve donc la propriete de super-convergence du parametre autoregressif. En rappelant que α ≈ 1+ c
T on presente[C.8] de facon equivalente,
T (α− 1) =⇒ c +ω2
∫ 1
0W (r)dJc(r) + λ2
ω2∫ 1
0Jc(r)2dr
(C.9)
On a donc, de facon intuitive puisque lorsque la taille de l’echantillon augmenteon se rapproche de la racine unitaire, une tendance en probabilite de α vers un.L’equation [C.9] montre aussi qu’il n’est pas possible d’estimer simplement (iepar les MCO) le parametre de localisation c de facon convergente, puisque ceparametre peut aussi s’ecrire sous la forme T (α − 1). Phillips, Moon et Xiao[15] donnent l’intuition de cette difficulte. Ils notent que nous pourrions ob-tenir un estimateur du parametre de localisation en regressant ∆yt sur xt ≡T−1yt−1. Puisque T−
12 y[rT ] =⇒ ωJc(r), par le continuous mapping theorem on
a∑T
t=1 x2t =⇒ ω2
∫ 1
0Jc(r)2. Ainsi la variance de la variable explicative xt tend
vers zero lorsque la taille de l’echantillon tend vers l’infini, ie cette variable emetun signal nul asymptotiquement, on ne peut donc estimer de facon convergentele parametre c.
22

Dans la section suivante nous presentons comment Phillips et Moon [14] ex-ploitent la dimension panel pour obtenir une estimation convergente du pa-rametre de localisation (et, ce qui nous interesse plus, comment ils construisentun intervalle de confiance pour le parametre autoregressif commun dans la di-mension individuel).
C.2 Une strategie d’estimation en panel
L’usage de la dimension panel permet d’obtenir une estimation convergentedu parametre de localisation. On considere le modele suivant,
yi,t = αyi,t−1 + ui,t
avec α = ecT et ui,t un processus lineaire stationnaire qui verifie les hypotheses
H1 et H2. On suppose de plus que supi E[yi,0] < ∞.L’intuition est la suivante. En considerant une asymptotique sequentielle (onfait d’abord tendre T vers l’infini, pour N fixe, puis N), on a,
T (α− α) =⇒(
1N
N∑
i=1
ω2i
∫ 1
0
Jc,i(r)2dr
)−1
×
1N
N∑
i=1
(ω2
i
∫ 1
0
Jc,i(r)dWi(r) + λ2i
)(C.10)
Ceci suggere l’utilisation, comme dans Phillips [11], d’un estimateur des MCOmodifie (que nous notons α) pour corriger du biais lie a la dependance tempo-relle. Ainsi, on a
T (α− α) =⇒(
1N
N∑
i=1
∫ 1
0
Jc,i(r)2dr
)−1
×
1N
N∑
i=1
(∫ 1
0
Jc,i(r)dWi(r))
(C.11)
En notant que l’esperance du numerateur est nulle et que sa variance est finie,on sait (par la loi des grands nombres) que le numerateur tend vers zero enprobabilite. Ainsi T (α− α) tend vers zero en probabilite et donc c converge enprobabilite vers c. L’exploitation de la variabilite dans la dimension individuellenous permet d’identifier le parametre de localisation.La procedure d’estimation convergente paraıt relativement simple. Mais ce modelen’est pas assez generale, en particulier il n’autorise pas en l’etat la prise encompte d’une partie deterministe. L’introduction d’une tendance polynomialequ’il faudra estimer, va entraıner une source de biais supplementaire (l’extrac-tion de la tendance estimee introduit une correlation entre le processus filtre etla perturbation stationnaire du modele). Phillips et Moon [14] proposent unecorrection asymptotique de ce biais. Ils considerent le modele suivant,
zi,t = βi,0 + βi,1t + yi, t (C.12)yi,t = αyi,t−1 + ui,t (C.13)
23

avec toujours α = ecT et ui,t un processus lineaire stationnaire. Le residu ob-
tenu en regressant, pour chaque individu, le processus zi,t sur une constanteet une tendance lineaire constitue une filtration du processus de sa tendancedeterministe, on notera zi,t. Les deux auteurs calculent le biais asymptotiquede l’estimateur de α corrige de la dependance temporelle dans la perturbationstationnaire. Cet estimateur est donne par
α+ =
(N∑
i=1
T∑t=1
z2i,t−1
)−1 N∑
i=1
T∑t=1
(zi,t−1zi,t − T λ2
i
)(C.14)
ou λ2i est un estimateur non parametrique de λ2
i . En faisant tendre T vers l’infini,on a
T (α+ − α) =⇒(
N−1N∑
i=1
∫ 1
0
J2c,i(r)
)−1
N−1N∑
i=1
∫ 1
0
Jc,idWi(r) (C.15)
ou Jc,i est une fonctionnelle du processus d’Ornstein–Uhlenbeck, obtenu commela limite de T−
12 zi,t−1. Phillips et Moon calculent l’esperance du numerateur
puis du denominateur de cette expression asymptotique et appliquent la loifaible des grands nombres (les variances sont finies) pour obtenir,
T (α+ − α)proba−−−−→N→∞
w2(c)w1(c)
(C.16)
c+ proba−−−−→N→∞
c +w2(c)w1(c)
≡ F (c) (C.17)
L’estimateur du parametre de localisation, comme attendu, est asymptotique-ment biaise. En notant que le biais asymptotique ne depend que du parametre delocalisation, Phillips et Moon montrent que celui-ci est asymptotiquement iden-tifiable si on suppose qu’il est negatif. Pour cela il suffit d’evaluer numeriquementle biais asymptotique, ou de facon equivalente la fonction reciproque de F.Enfin, Phillips et Moon montrent que
c+ − F (c) =⇒ N (0, N−1ΦVbc+(c)) (C.18)
Vbc+(c) = w1(c)−4(−w2(c) w1(c)
)V (c)
(−w2(c)w1(c)
)(C.19)
Φ = limN→∞
N∑
i=1
ω4i (C.20)
et ou V (c) est une matrice 2× 2 dont l’expression analytique donnee dans [14,pages 28-30]. En pratique on obtient cette matrice de variance-covariance avecdes methodes d’integration numerique.Ces derniers resultats nous permettent de construire des intervalles de confianceasymptotiques pour le parametre de localisation.
24