
UNIVERSITE MONTPELLIER II
139
ACADEMIE DE MONTPELLIER UNIVERSITE MONTPELLIER II SCIENCES ET TECHNIQUES DU LANGUEDOC THESE présentée à l'Université Montpellier II - Sciences et Techniques du Languedoc pour obtenir le diplôme de DOCTORAT SPECIALITE : Formation Doctorale : Ecole Doctorale : MECANIQUE, GENIE MECANIQUE, GENIE CIVIL Mécanique des Matériaux, Structures et Génie des Procédés SCIENCES POUR L'INGENIEUR MORPHOGENESE DES MEMBRANES TEXTILES ARCHITECTURALES par Bernard MAURIN Soutenue le 30 Janvier 1998 devant le Jury composé de : MM. O. MAISONNEUVE Professeur Université Montpellier II Président M. LEMAIRE Professeur IFMA Aubière Rapporteur K. LINKWITZ Professeur Université Stuttgart Rapporteur J.M. DELARUE Professeur Ecole d'Architecture Paris-Villemin Examinateur H. NOOSHIN Professeur Université Guildford Examinateur R. MOTRO Professeur Université Montpellier II Directeur de Thèse
Transcript of UNIVERSITE MONTPELLIER II

ACADEMIE DE MONTPELLIER
UNIVERSITE MONTPELLIER II
SCIENCES ET TECHNIQUES DU LANGUEDOC
THESE
présentée à l'Université Montpellier II - Sciences et Techniques du Languedoc
pour obtenir le diplôme de DOCTORAT
SPECIALITE :
Formation Doctorale :
Ecole Doctorale :
MECANIQUE, GENIE MECANIQUE, GENIE CIVIL
Mécanique des Matériaux, Structures et Génie des Procédés
SCIENCES POUR L'INGENIEUR
MORPHOGENESE DES
MEMBRANES TEXTILES ARCHITECTURALES
par
Bernard MAURIN
Soutenue le 30 Janvier 1998 devant le Jury composé de :
MM. O. MAISONNEUVE Professeur Université Montpellier II Président
M. LEMAIRE Professeur IFMA Aubière Rapporteur
K. LINKWITZ Professeur Université Stuttgart Rapporteur
J.M. DELARUE Professeur Ecole d'Architecture Paris-Villemin Examinateur
H. NOOSHIN Professeur Université Guildford Examinateur
R. MOTRO Professeur Université Montpellier II Directeur de Thèse
Avant-propos III
Avant-Propos
Ce travail est l'aboutissement de trois années de recherche effectuées au Laboratoire de
Mécanique et Génie Civil de l'Université Montpellier II.
En acceptant de présider le jury de soutenance de cette thèse, Monsieur Olivier
MAISONNEUVE, Professeur, Directeur du Laboratoire de Mécanique et Génie Civil de
l'Université Montpellier II, me fait un honneur auquel je suis très sensible. Je tiens à lui
exprimer ici l'expression de ma vive gratitude.
Je remercie très sincèrement Monsieur Maurice LEMAIRE, Professeur à l'Institut
Français de Mécanique Avancée de Clermond Ferrand et Monsieur Klaus LINKWITZ,
Professeur à l'Université de Stuttgart, qui ont accepté d'être rapporteurs de ce travail. Qu'ils
trouvent ici l'expression de ma profonde reconnaissance.
Je suis très sensible à la présence dans ce jury de Monsieur Jean Marie DELARUE,
Professeur à l'Ecole d'Architecture de Paris Villemin, et de Monsieur Hoshyar NOOSHIN,
Professeur à l'Université de Guildford, ainsi qu'à l'attention dont ils ont su faire preuve à
l'égard de mes travaux.
Cette étude a été réalisée sous la direction de Monsieur René MOTRO, Professeur au
Laboratoire de Mécanique et Génie Civil, Responsable de l'équipe Conception en Structures.
De part la qualité et la perspicacité de ses enseignements, se situant bien au-delà de simples
considérations scientifiques, cette rencontre restera un évènement marquant à mes yeux. Je
tiens à lui exprimer toute ma reconnaissance et ma sincère amitié.
J'adresse le témoignage de ma sympathie à tous les membres du Laboratoire de
Mécanique et Génie Civil de l'Université Montpellier II. Leur accueil, leurs conseils et
encouragements m'ont été d'une aide certaine.

IV Résumé
Résumé
Le développement des structures à base de toiles textiles tendues souligne l'insuffisance
des approches conceptuelles traditionnelles et nécessite de nouvelles méthodes. Les travaux
présentés dans ce mémoire se rapportent ainsi à l'étude des procédés de recherche de forme
des Membranes Textiles Architecturales et à la découpe de laizes.
Nous mettons tout d'abord en évidence l'insuffisance d'une représentation discrète des
toiles tendues (réseaux de câbles) et proposons la méthode de recherche de forme des
Densités de Contraintes Surfaciques qui s'appuie sur une modélisation continue du
domaine. Cet aspect est complété par une étude de la stabilité ainsi que des mécanismes des
structures tendues.
L'attention se porte ensuite sur les procédés destinés à l'investigation de formes
minimales : réseaux de câbles de longueur minimale et surfaces d'aire minima. Deux
méthodes sont présentées, une première fondée sur l'utilisation des méthodes de Densités et
une seconde approche liée à la minimisation de fonctionnelles selon la méthode du Gradient
Conjugué (problèmes d'optimisation). Nous proposons également un outil autorisant le calcul
des caractéristiques géométriques des surfaces (valeurs des courbures moyennes et
gaussiennes en tout point du milieu).
Enfin, la méthode de Composition des Contraintes dédiée à la détermination des
formes de découpe du tissu permet de prendre en considération les paramètres de géométrie,
état de prétension du domaine et rhéologie du matériau, tout en atténuant les erreurs
inhérentes à toute découpe de laizes (minimisation selon des méthodes de moindres carrés).
Ces développements visent à apporter des réponses concrètes aux problèmes posés,
directement utilisables par les concepteurs.
Abstract
The development of fabric structures points out the traditional approaches' inadequacy
and requires new processes. These works deal, thus, with the study of form-finding methods
and cutting pattern.
Firstly, we emphasize on the lacks of a discrete representation for tensile membranes
(cable net) and put forward the Surface Stress Density Method as a form-finding tool based
upon a continuous modelling of the domain. A study of stability and mechanisms for tensile
structures brings additional considerations.
The attention is then focused on processes associated with the investigation of minimal
configurations : minimal length cable nets and minimal area surfaces. Two methods are
proposed, related to Density methods and also to the minimization of nonlinear functions
with Conjugate Gradient method (optimization problems). Surface geometric properties
(main curvature radii) are calculated according to specific procedures.
Next, the Stress Composition method devoted to the cutting pattern allows to take
into account the membrane characteristics (geometry and stress distribution, material
constitutive laws), while reducing inherent errors (minimization with least squares methods).
Mots-clés V
MOTS-CLES
ARCHITECTURE TEXTILE
STRUCTURES TENDUES
RECHERCHE DE FORME
METHODE DES DENSITES DE CONTRAINTES SURFACIQUES
STABILITE
COURBURES DES SURFACES
RESEAUX DE CABLES DE LONGUEUR MINIMALE
SURFACES D'AIRE MINIMALE
DECOUPE DE LAIZES
METHODE DE COMPOSITION DES CONTRAINTES
KEY-WORDS
FABRIC MEMBRANES
TENSILE STRUCTURES
FORM-FINDING
SURFACE STRESS DENSITY METHOD
STABILITY
SURFACE CURVATURES
MINIMAL LENGTH CABLE NETS
MINIMAL AREA SURFACES
CUTTING PATTERN
STRESS COMPOSITION METHOD

Table des matières VII
Table des matières
Introduction générale............................................................................................................... 1
Partie I : Recherche de Forme et Stabilité des Membranes Textiles Architecturales
Introduction .......................................................................................................................... 7
Hypothèses fondamentales .................................................................................................. 8
I-1 Réseaux de câbles tendus et Recherche de Forme....................................................... 9
I-1-1 Les réalisations marquantes....................................................................................... 9
I-1-2 La Méthode des Densités de Forces ........................................................................ 10
I-2 Etude des états d'autocontrainte et validité du Principe d'Equivalence ................. 12
I-2-1 Recherche des états d'autocontrainte ....................................................................... 12
I-2-2 Validité du Principe d'Equivalence ......................................................................... 13
I-2-3 Etude d'un système hybride ..................................................................................... 15
I-3 Recherche de Forme des Membranes Textiles Architecturales ............................... 17
I-3-1 Quelques réalisations............................................................................................... 17
I-3-2 Les différents procédés de Recherche de Forme ..................................................... 18
I-3-3 La Méthode des Densités de Contraintes Surfaciques............................................. 19
I-3-3-1 Expression des efforts internes dans le cas d'une prétension isotrope ............. 19
I-3-3-2 Etude de la convergence................................................................................... 21
I-3-3-3 Applications ..................................................................................................... 23
I-3-3-4 Combinaison avec la Méthode des Densités de Forces.................................... 25
I-3-3-5 Etude de Structures Gonflables........................................................................ 26
I-4 Stabilité des Membranes Textiles Architecturales .................................................... 28
I-4-1 Rappels sur la stabilité des équilibres...................................................................... 28
I-4-2 Recherche des mécanismes ..................................................................................... 29
I-4-3 Détermination des énergies de déformation élémentaires sur l'espace des
mécanismes ...................................................................................................................... 29
I-4-3-1 Cas d'un élément de câble ................................................................................ 29
I-4-3-2 Cas d'un élément de membrane........................................................................ 30
I-4-4 Etude de la stabilité sur les différents espaces......................................................... 32
I-4-4-1 Stabilité lorsque les mécanismes ne sont pas excités....................................... 32
I-4-4-2 Stabilité lorsque seulement les mécanismes sont excités................................. 33
I-4-4-2 Stabilité au voisinage des déplacements orthogonaux ..................................... 34
I-4-4-2 Stabilité au voisinage des mécanismes ............................................................ 34
Conclusion................................................................................................................................ 37

VIII Table des matières
Partie II : Recherche de Forme de Configurations Minimales
Introduction ........................................................................................................................ 37
II-1 La Nature et les Formes Minimales........................................................................... 41
II-2 Recherche de Formes Minimales par les Méthodes de Densités............................. 43
II-2-1 Etude de réseaux de câbles de longueur minimale................................................. 43
II-2-1-1 Réseau avec coefficients de densités de forces identiques ............................. 43
II-2-1-2 Réseau de longueur minimale......................................................................... 44
II-2-1-3 Applications .................................................................................................... 45
II-2-2 Etude des surfaces d'aire minimale ........................................................................ 47
II-2-2-1 Surface avec coefficients de densités de contraintes identiques ..................... 47
II-2-2-2 Surface d'aire minimale................................................................................... 49
II-2-2-3 Applications .................................................................................................... 50
II-3 Recherche de Formes Minimales par la Méthode du Gradient Conjugué ............ 53
II-3-1 Formes minimales et forces internes...................................................................... 53
II-3-2 La Méthode du Gradient Conjugué ........................................................................ 54
II-3-2-1 Considérations générales ................................................................................ 54
II-3-2-2 Les procédures de Recherche de Ligne........................................................... 55
II-3-3 Applications numériques........................................................................................ 57
II-3-3-1 Présentation des exemples .............................................................................. 58
II-3-3-2 Comparaison des résultats .............................................................................. 60
II-3-3-3 Quelques autres configurations....................................................................... 61
II-3-4 Approche combinée : Méthodes de Densités et du Gradient Conjugué................. 62
II-4 Détermination des Caractéristiques Géométriques des surfaces ........................... 63
II-4-1 Principe de la méthode ........................................................................................... 63
II-4-2 Applications ........................................................................................................... 64
Conclusion........................................................................................................................... 67

Table des matières IX
Partie III : Découpe de Laizes et Mise en Prétension des Membranes Textiles
Architecturales
Introduction ........................................................................................................................ 69
III-1 Découpe de Laizes des Membranes Textiles Architecturales................................ 71
III-1-1 Etude des différents procédés ............................................................................... 71
III-1-1-1 Les méthodes de détermination des lisières................................................... 71
III-1-1-2 La recherche des formes planes ..................................................................... 71
III-1-2 La Méthode de Composition des Contraintes ....................................................... 73
III-1-2-1 Objectifs et principes généraux ..................................................................... 73
III-1-2-2 Etude des transformations ............................................................................. 74
III-1-2-3 Détermination du domaine Ω0 ..................................................................... 76
III-1-2-4 Méthodologie................................................................................................. 79
III-1-2-5 Mise en oeuvre du procédé ............................................................................ 80
III-1-3 Applications .......................................................................................................... 80
III-2 Mise en Prétension des Membranes Textiles Architecturales ............................... 86
III-2-1 Modélisation de la Mise en Prétension ................................................................. 86
III-2-2 Applications .......................................................................................................... 90
Conclusion........................................................................................................................... 93
Conclusion générale ............................................................................................................... 95
Annexes
Annexe A : Méthode des Densités de Forces....................................................................... 97
Annexe B : Principes Variationnels - Discrétisation par Eléments Finis............................. 99
Annexe C : Lois de comportement du matériau textile...................................................... 105
Annexe D : Interpolation cinématique et des déplacements .............................................. 109
Annexe E : Convergence de la Méthode des Densités de Contraintes Surfaciques ........... 115
Annexe F : Etude de la définie-positivité des matrices de caractérisation énergétique ..... 119
Annexe G : Calcul des dérivées des fonctions de forme pour les éléments T6 et T10 ...... 121
Annexe H : Résolution de systèmes par Méthodes de Moindres Carrés............................ 125
Annexe I : A propos des abeilles ... ................................................................................... 127
Bibliographie .......................................................................................................................... 129

Notations XI
Notations
Symboles
[ ] Matrice
et Vecteur colonne et ligne
[ ]T et [ ]−1
Matrice transposée et inverse
[ ]( )det Déterminant d'une matrice
[ ]n Matrice carrée à la puisssance n
[ ]( )i ieme vecteur ligne d'une matrice
[ ]( )A Aij ij= Terme (ij) de la matrice [ ]A
( )X Xi i= ieme composante du vecteur colonne X
l Norme métrique l ( =
2 correspond à la norme euclidienne)
[ ]Idn et [ ]0n Matrice identité et nulle d'ordre n
Im A Sous-espace vectoriel image de [ ]A
Ker A Sous-espace vectoriel noyau de [ ]A
Valeur absolue r ru u⋅ ou u u, Produit scalaire
∧ Produit vectoriel
⊗ Produit tensoriel
⊕ Somme directe
∑ Sommation
Ωi Configuration i d'une structure
dV i Element de volume sur Ωi
V i∫ Intégrale sur V
i
∀ Quel que soit
∃ Il existe
∈ Qui appartient
0r Ordre r
≈r
Egalité limitée à l'ordre Or ( ≈ correspond à ≈1
)
∂
∂
v
Xv X= , Dérivée partielle de la variable v par rapport à la variable X
δu Première variation de la quantité u
δ2u Seconde variation de la quantité u

XII Notations
Notations pour tous les éléments (e=m pour les membranes et e=c pour les câbles)
( )r r vX Y Z Repère global lié à la structure
N et N Nombre total de noeuds et de degrés de liberté de la structure
Xi et X Vecteur élémentaire et généralisé des coordonnées nodales
( )r r rx y ze e e Repère local lié à un élément
de et d Vecteur élémentaire et généralisé des déplacements nodaux
ue Champ de déplacement élémentaire
[ ]F Tenseur gradient de transformation
[ ]R et [ ]U Tenseur de rotation et d'élongation pure
[ ]Se Tenseur élémentaire des contraintes de Piola-Kirchhoff 2 (PK2)
Se et Sloc
e Vecteur élémentaire PK2 en repère global et local
[ ]σe Tenseur élémentaire des contraintes de Cauchy
σe et σloce Vecteur élémentaire des contraintes de Cauchy en repère global et local
σ0 loce
Vecteur élémentaire de précontrainte en repère local
σ0 loc Vecteur généralisé de précontrainte
[ ]εe Tenseur élémentaire des déformations de Green-Lagrange (GL)
[ ]εLe et [ ]εNL
e Partie linéaire et non linéaire du tenseur de Green-Lagrange
εe et εloce Vecteur élémentaire des déformations de GL en repère global et local
[ ]ee Tenseur élémentaire des déformations d'Almansi-Euler
wte et Wt Energie potentielle totale élémentaire et généralisée de la structure
wde et Wd Energie de déformation élémentaire et généralisée de la structure
wee et We Travail élémentaire et généralisé des forces extérieures de la structure
fie
et Fint Vecteur élémentaire et généralisé des efforts internes
[ ]ψ inte
Matrice élémentaire de caractérisation des efforts internes
fee
et Fext Vecteur élémentaire et généralisé des forces extérieures
feυe
et fese
Vecteur élémentaire des forces extérieures de volume et de surface
fe pie
Vecteur élémentaire des forces extérieures ponctuelles
Re
et R Vecteur résidu élémentaire et généralisé

Notations XIII
[ ]bLe Matrice élémentaire d'interpolation des déformations linéaires
[ ]bNLe Matrice élémentaire d'interpolation des déformations non linéaires
[ ]kTe et [ ]KT Matrice de rigidité tangente élémentaire et généralisée
[ ]kLe et [ ]KL Matrice de rigidité linéaire élémentaire et généralisée
[ ]kNLe et [ ]KNL Matrice de rigidité non linéaire élémentaire et généralisée
[ ]keσ et [ ]Kσ Matrice de rigidité géométrique élémentaire et généralisée
[ ]ae et [ ]A Matrice d'équilibre élémentaire et généralisée
[ ]Ee et [ ]Eloc
e Matrice élémentaire d'élasticité en repère global et local
[ ]Te
ε Matrice de passage des déformations du repère global au repère local
[ ]Te
σ Matrice de passage des contraintes du repère global au repère local
[ ]Te
σ' Matrice de passage des contraintes du repère local au repère global
ξ et η Coordonnées intrinsèques
[ ]Ne Matrice des fonctions de forme
[ ]Je et [ ]j
e Matrice jacobienne et son inverse
rg i0 et
rg
i0 ieme vecteur de la base covariante et de la base contravariante
Notations pour les éléments de membrane
M Nombre total d'éléments de membrane de la structure
mi Nombre d'éléments de membrane reliés avec le noeud i
sm et epm Aire et épaisseur d'un élément
qs Coefficient de densité de contrainte surfacique d'un élément
σ0m Précontrainte
S Somme totale des aires des éléments élevées au carré
S Somme totale des aires des éléments
lbm et lhm Longueurs de la base et de la hauteur d'un élément
[ ]d m Matrice élémentaire de caractérisation énergétique
Emt et Emc Modules de Young selon la direction de la trame et de la chaîne
Gmct , νct et νtc Module de Coulomb et coefficients de Poisson
[ ]Eortm
Matrice élémentaire d'élasticité en repère d'orthotropie

XIV Notations
[ ]Tm
ε,ort Matrice de passage des déformations du repère d'orthotropie au repère local
θortm Angle orienté direct entre la direction de la trame et le vecteur
rx m
Notation pour les éléments de câble
C Nombre total d'éléments de câble de la structure
ci Nombre d'éléments de câble reliés avec le noeud i
sc et vc Section et volume du câble
lc Longueur d'un câble dans la configuration d'équilibre
ql Coefficient de densité de force d'un élément
t c0 et σ0c Prétension et précontrainte dans un élément
L Somme totale des longueurs des câbles élevées au carré
L Somme totale des longueurs des câbles
[ ]d c Matrice élémentaire de caractérisation énergétique
Ec Module de Young
[ ]C et [ ]D Matrice de connectivité et matrice de connexion
[ ]Cl et [ ]Cf Parties de la matrice [ ]C liées au noeuds libres et fixes
[ ]Ql Matrice des coefficients de densités de force
Xl et Xf Vecteur des coordonnées des noeuds libres et fixes selon rX
Abréviations
CAO Conception Assistée par Ordinateur
FLA Formulation Lagrangienne Actualisée
FLT Formulation Lagrangienne Totale
MCC Méthode de Composition des Contraintes
MEF Méthode des Elements finis
MMC Méthode des Moindres Carrés
MDCS Méthode des Densités de Contraintes Surfaciques
MDF Méthode des Densités de Forces
MTA Membrane Textile Architecturale
NF Noeud entièrement fixe
NL Noeud entièrement libre
Introduction générale

Introduction générale 1
Introduction générale
Il n'est plus nécessaire d'insister sur le succès grandissant que connaissent les structures
à base de Toiles Textiles depuis ces dernières années. Cette nouvelle composante du paysage
architectural se trouve en effet en étroite correspondance avec les besoins et les attentes des
concepteurs. Toutefois, leur créativité est dans ce domaine plus que jamais tributaire des
avancées technologiques ainsi que des procédés de réalisation et de calcul mis à leur
disposition. C'est donc dans une optique d'extension de ces moyens d'expression que se
situent les travaux réalisés dans le cadre de ce mémoire de thèse.
Les applications des membranes tendues ont été multipliées depuis des temps éloignés :
protection contre les intempéries (tentes nomades, foraines, militaires), asservissement de
l'énergie éolienne (marine à voile, aérostats, ailes d'avions). Notre milieu de siècle a vu alors
se dessiner les contours d'un changement progressif mais néanmoins radical. Des besoins
nouveaux apparaissent : grandes surfaces couvertes et aires de stockage provisoires ou lieux
d'expositions et de manifestations culturelles, désir de mobilité de ces structures imposant
une édification ainsi qu'un démontage rapides et devant donc allier légèreté avec facilité de
mise en place et résistance. A cela s'ajoutent la recherche d'une grande souplesse d'utilisation
des bâtiments permettant agrandissements ou autres modifications ainsi que la nécessité de
réduire les coûts de construction [MAL 89].
Parallèlement à ces nouveaux besoins, on assiste également à l'émergence de nouvelles
approches de la conception architecturale et même de la finalité d'un ouvrage. Désirant
rompre avec une orientation vers des édifices à géométrie massive ou parfois agressive,
certains estiment qu'il est grand temps de se tourner à nouveau vers la nature et les formes
souples et agréables qu'elle offre dont l'équilibre structurel répond souvent à des critères
d'économie d'effort et de matière. Pour d'autres, il est nécessaire de redéfinir la notion de
durée de vie d'un ouvrage à la lumière de son utilisation présente ou à venir et par là-même
offrir à leurs successeurs la possibilité de le modifier ou de le supprimer à moindres frais.
Tous ces éléments favorisent par voie de conséquence le développement accru de
l'Architecture Textile. Cet aspect ne peut être que renforcé par la mise au point de nouvelles
fibres synthétiques aux performances élevées et donc par l'utilisation d'un matériau
conjuguant légèreté et résistance. Toutefois, le principe constructif même des membranes
textiles est source de nouvelles problématiques; des distorsions apparaissent lorsque l'on
compare les aspirations des concepteurs avec les connaissances actuelles.
L'utilisation de la précontrainte pour assurer à la structure la rigidité et stabilité
nécessaires se traduit en effet par une forte interdépendance entre sa géométrie et la
distribution des contraintes au sein du domaine. La détermination de ces paramètres (forme et
tension de la toile) répond à l'appellation de Recherche de Forme et constitue de fait l'étape
première de toute étude. La prédominance de telles considérations mécaniques est ici
généralement éloignée de la culture des architectes et inhabituelle au regard des ingénieurs.
2
Les différents procédés de Recherche de Forme à ce jour proposés reposent sur des
différentes approches : utilisation de modèles physiques (films de savon), méthodes
géométriques, procédés numériques fondés sur des considérations mécaniques de natures
différentes. On peut néanmoins regretter qu'ils se traduisent soit par une restriction de la
gamme des formes possibles, soit par des incertitudes trop élevées ou bien par la complexité
des approches mécaniques utilisées, ces éléments incitant ainsi à proposer de nouvelles
méthodes.
Une fois que la géométrie et l'état de prétension de la structure sont déterminés, le
concepteur s'intéresse dans un second temps à sa réalisation. Il s'agit dans le cas présent de
spécifier les formes de découpe de la toile, c'est à dire les pièces de tissu dont l'assemblage
permettra de concevoir au mieux, après mise en tension sur le site, la membrane envisagée.
Cette étape, désignée sous le terme de Découpe de Laizes, doit être conduite de façon à
minimiser les erreurs obtenues à cette occasion. La pertinence et les performances des
procédés utilisés sont ainsi en relation directe avec l'étendue des possibilités offertes à
l'architecte.
Enfin, c'est seulement dans un dernier temps que l'attention se portera sur l'analyse du
comportement de l'édifice soumis à des actions extérieures (généralement de type climatique
: vent, neige ...). Cette analyse mécanique est de fait moins prépondérante dans la conception
des Structures Légères que dans celle des structures classiques.
L'ensemble des problèmes posés peut être analysé en replaçant par exemple l'étude des
Membranes Textiles Architecturales dans le contexte plus général de la conception de
systèmes. Le schéma retenu permet de proposer un mode organisationnel reposant sur quatre
paramètres principaux de la conception : Formes, Forces, Matériaux et Structures.
Le concept de Forces s'interprète, au sens large, selon les diverses actions extérieures
susceptibles d'être mises en jeu ainsi que selon les caractéristiques de prétension existant au
sein de l'ouvrage. Dans le cas des structures tendues, ces dernières actions ont un caractère
permanent et elles seules seront prises en compte dans le cadre de ces travaux.
La notion de Matériau est pour sa part clairement définie en se référant à l'élément
constitutif en tant qu'entité mécanique, elle correspond en ce sens à ses lois rhéologiques de
comportement.
Les analyses sont plus complexes lorsqu'il s'agit d'aborder les concepts de Formes et
Structures tant ces deux éléments sont intimement liés. Cette thématique trouve un écho dans
la Morphologie Structurale, témoignant à cette occasion de la richesse du langage des
Formes. Cet aspect a été source de multiples développements et le propos n'est pas de s'y
consacrer à nouveau.
Nous nous limiterons à une définition où la Forme permet de caractériser l'existence spatiale
d'un objet, soit entendue comme la projection du système étudié dans l'espace géométrique.

Introduction générale 3
La notion de Structure doit de son côté être comprise en tant que Structure Relationnelle des
éléments constructifs, ce qui implique simultanément l'énoncé de leurs liaisons avec
l'environnement extérieur (conditions d'appuis, méthodes et technologies d'accrochage) et
celui de leurs liaisons et modes de schématisation internes (topologie structurale du maillage)
[MOT 92] et [REN 92].
Marquons ici une pause afin de clarifier le propos et, au travers d'une brève étude
historique, de dégager ce qui constituera une des lignes directrices de ces travaux de thèse.
Le développement des structures légères se distingue en effet par quelques dates charnières.
Elles correspondent à l'édification d'ouvrages marquants ou à la mise au point de nouveaux
outils de calcul, éléments tous deux à l'origine d'avancées majeures.
L'histoire nous apprend ainsi que les constructions à base de réseaux de câbles tendus
ont joué un rôle majeur. Citons immédiatement, et à juste titre, la couverture des installations
des Jeux Olympiques de Munich réalisée dans les années 70. Cet ouvrage, de par son
importance et la nature des innovations apportées, a servi de catalyseur en démontrant de
façon spectaculaire la faisabilité de tels projets et a inscrit dans l'imaginaire collectif les
Structures Légères en tant que perspective d'avenir.
Une autre étape, d'ordre numérique cette fois, a été franchie durant cette même période
grâce à l'apport de la Méthode des Densités de Forces s'agissant de l'étude et du calcul des
structures en réseaux de câbles tendus. Cette méthode s'est révélée tellement perspicace et
efficace que certains ont dès lors envisagé de l'étendre au calcul des toiles textiles, se fondant
alors sur une hypothèse d'équivalence entre un réseau de câbles et une membrane tendue.
Cette approche est d'ailleurs toujours d'actualité et de nombreux outils d'analyse utilisés en
Architecture Textile s'y réfèrent encore. D'autres ont cependant souhaité aborder les
problèmes posés dans leur entière complexité en délaissant ce Principe d'Equivalence. Quoi
qu'il en soit, ces techniques d'étude des réseaux de câbles tendus représentent pour le
concepteur de membranes une étape essentielle car elles permettent d'entrevoir les pistes à
suivre à partir d'une écriture simplifiée.
Pour revenir au concept morphologique de Structure Relationnelle, nous distinguons à
présent les deux approches topologiques envisageables : une toile tendue sera considérée
comme un réseau de câbles et nous emploierons le vocable de représentation linéaire (ou de
schématisation discrète), ou bien elle conservera son intégrité en tant que membrane et nous
parlerons de représentation surfacique (ou schématisation continue).
Cette double approche sera présente tout au long de cette thèse où les deux formalismes
seront abordés en parallèle, non sans avoir pris soin d'étudier leurs relations et tout
particulièrement la réalité d'une possible équivalence.
Après avoir exposé les quatre concepts de Formes, Forces, Matériaux et Structures,
l'attention se porte à présent sur les aspects fondamentaux que représentent les liens qui les
unissent, se situant bien au-delà de simples dépendances pour devenir constitutifs du système
en lui-même.
4
La déclinaison Formes-Structures ayant déjà été évoquée, consacrons nous à celle de
Formes-Forces. L'Architecture Textile, et de façon plus générale tout type de système
constructif présentant des caractéristiques de précontrainte, se caractérise par une forte
corrélation entre ces deux concepts, les relations possibles dérivant nécessairement de la
notion d'équilibre mécanique du domaine. Si les Forces s'entendent seulement au sens
d'efforts internes ou au cas particulier de forces extérieures servant à mettre l'ouvrage en
prétension (à l'image des Structures Gonflables), l'étude de ces correspondances peut
s'inscrire dans le contexte plus général de la Recherche de Forme.
Le couplage entre les concepts de Formes, Forces, Structures et celui de Matériaux
n'intervient que par la suite. Il reflète en effet le passage d'un modèle théorique auparavant
spécifié lors du processus de Recherche de Forme vers sa réalisation. Il correspond en ce sens
à la détermination d'une configuration géométrique et relationnelle de départ qui, une fois
mise en place sur le site selon les modes de liaisons avec l'environnement extérieur énoncés
par la notion de Structure, devra respecter le plus fidèlement possible ceux issus des concepts
de Formes et de Forces. Dans le cas particulier des membranes textiles, il s'agit de spécifier
les éléments de tissu de forme plane (appelés laizes) dont l'assemblage constitue cette
configuration de départ.
Nous avons ainsi vu apparaître en filigrane, tout au long de cette introduction, ce qui va
constituer l'ossature de ces travaux.
La première partie de ce mémoire a en effet pour objet la Recherche de Forme et la
Stabilité des Membranes Textiles Architecturales.
Il s'agit d'aborder la relation Formes-Forces dans le cadre d'une représentation linéaire puis
d'une approche surfacique, non sans avoir débattu d'une possible correspondance. L'étude de
la stabilité de ces structures vient ensuite en complément indispensable. Elle permet de
statuer sur l'existence et l'ordre d'éventuels mécanismes pour mener vers l'énoncé de critères
de stabilité et en tirer les conclusions qui s'imposent.
La seconde partie s'oriente vers l'étude de systèmes naturels avec une approche
mécanique et se trouve ainsi consacrée à la Recherche de Forme de Configurations
Minimales.
Plus précisément, le propos consiste à étudier ces surprenantes et exceptionnelles notions que
représentent les Réseaux de Longueur Minimale et les Surfaces d'Aire Minimale puis à
découvrir les répercussions qu'elles peuvent avoir dans le domaine des Structures Légères.
En dernier lieu, la troisième partie est dédiée à la Découpe de Laizes et à la Mise en
Prétension des Membranes Textiles Architecturales.
Faisant ici intervenir le paramètre Matériau, il s'agit de déterminer une configuration de
départ non tendue qui, une fois mise en place sur le site, répondra au plus près aux exigences
du concepteur. L'étude de cette corrélation s'envisage d'après une modélisation du Processus
de Déploiement et permet alors de prononcer un jugement sur les procédés de Découpes de
Laizes auparavant spécifiés.

Introduction générale 5
Comme annoncé précédemment, l'analyse statique ou dynamique du comportement des
structures tendues sous actions extérieures n'est volontairement pas abordée dans le cadre de
ce travail.
Afin de conférer un maximum de lisibilité à ce mémoire, les différentes parties
s'inscrivent dans un schéma délibérément simplifié : après un chapitre introductif et une
description de l'état de l'art, le texte est consacré aux nouvelles approches et méthodes
proposées ainsi qu'aux résultats obtenus. Les considérations d'ordre théorique déjà connues et
étayant le raisonnement sont développées en annexes ou font l'objet de références
bibliographiques. Il en est de même pour des démonstrations mathématiques qui, sinon,
surchargeraient le propos.
Nous invitons toutefois le lecteur à s'y reporter, et ce dans l'optique d'une meilleure
compréhension des thèmes abordés.

Partie I
Recherche de Forme et Stabilité des Membranes
Textiles Architecturales

Introduction 7
Introduction
La première partie de ce mémoire a pour objectif de proposer une nouvelle méthode de
Recherche de Forme pour les membranes textiles tendues puis d'étudier la Stabilité
mécanique des structures ainsi réalisées.
Après avoir posé les hypothèses d'ordre mécanique qui nous suivront tout au long de ces
travaux, l'intérêt se porte en premier lieu sur le mode de représentation linéaire que définissent
les ouvrages à base de réseaux de câbles tendus. Les réalisations majeures sont mises en
avant, suivies par la présentation de la Méthode des Densités de Forces. Dans le cadre d'un
formalisme permettant de caractériser les sous-espaces vectoriels des états d'autocontrainte, on
montre que l'hypothèse du Principe d'Equivalence entre un réseau de câbles et une membrane
tendue n'est pas toujours vérifiée.
Afin de pallier les inconvénients de la schématisation discrète, un nouveau processus de
Recherche de Forme fondé sur une approche surfacique est ainsi proposé. Répondant à
l'appellation de Méthode des Densités de Contraintes Surfaciques, elle apparaît comme une
extension de la Méthode des Densités de Force et, de par son écriture, autorise des
formulations mixtes ainsi que la Recherche de Forme de structures gonflables. De nombreuses
applications sont exposées et soulignent sa légitimité.
Le dernier chapitre traite de la Stabilité des structures tendues.
Réseaux de câbles ou toiles textiles, il s'agit de vérifier si cette notion fondamentale est
respectée. La détermination de l'ordre des mécanismes du système ainsi que l'énoncé de
critères de stabilité permet de répondre à cette question positivement.

8 Partie I
Hypothèses fondamentales
Avant de commencer l'exposé de ces travaux de thèse, il est nécessaire de présenter les
hypothèses qui nous accompagneront durant ce parcours.
Hypothèse H1 :
L'étude se situe dans le cadre des petites déformations élastiques.
Cette considération interviendra dans la partie III dédiée à la découpe de Laizes ainsi qu'à la
mise en prétension des Membranes Textiles Architecturales.
Hypothèse H2 :
Exprimées dans un repère local lié à un élément de membrane, les contraintes de Cauchy de
cet élément vérifient les relations suivantes :
σ σlocm
locm
z x<< et σ σlocm
locm
z y<<
σ σlocm
locm
xz xy<< et σ σlocm
locm
yz xy<<
Cela signifie que l'on se situera, pour un élément de membrane, dans un contexte de
Contraintes Planes. De plus, le cadre des déformations sera celui des Déformations Planes.
Pour un élément de câble, seules les composantes de contraintes et de déformations relatives à
son axe longitudinal sont non nulles.
Hypothèse H3 :
Les éléments de câble et de membrane suivent une loi de comportement rhéologique de type
solide élastique linéaire. Cette loi n'est valide que dans le domaine des tractions, seules
sollicitations compatibles avec la rigidité unilatérale des câbles et membranes.
Hypothèse H4 :
Dans un système constructif comportant un seul type d'éléments, tous les câbles ont même
section et tous les éléments de membrane une épaisseur identique.
Cela n'est pas forcément valable dans le cas de structures hybrides, c'est à dire comprenant des
éléments de natures différentes.

Réseaux de câbles tendus et Recherche de Forme 9
I-1 Réseaux de câbles tendus et Recherche de Forme
I-1-1 Les réalisations marquantes
Il est toujours difficile d'extraire quelques noms dans une liste dont chacune des
composantes représente en soi une pierre ajoutée à l'édifice architectural des constructions à
base de réseaux de câbles.
Cependant, il apparaît évident qu'une majorité des personnes interrogées mettra en
premier lieu l'accent sur la réalisation de la couverture des installations accueillant les Jeux
Olympiques de Munich en 1972 [HOL 97].
Répondant au souhait formulé par les autorités de la RFA d'une solution innovante et légère,
le choix proposé par les architectes Behnish & Partner fut retenu.
Fait majeur, les problèmes posés par la réalisation technique des couvertures furent l'occasion
de réunir quelque uns des plus grand spécialistes de l'époque : on citera volontiers F. Otto
(suite à son expérience acquise lors d'une précédente réalisation dans le cadre de l'Exposition
Universelle de Montréal), F. Leonhardt et J. Schlaich. Constitué par une succession de
structures indépendantes fondées sur l'utilisation de réseaux de câbles à double courbure
inverse, l'ensemble occupe une surface totale de 74 000 m2 et se distingue par des élévations
atteignant jusqu'à 80m. La couverture au sens propre du terme est réalisée par l'intermédiaire
de panneaux plexiglas disposés entre les éléments de câble.
Fig. I-1 Stade Olympique de Munich (vue d'ensemble)
Cette réalisation se distingue par l'ensemble des innovations
techniques qui ont été apportées : de façon non exhaustive, nous
pouvons mettre en exergue les études portant sur la résistance en
fatigue des éléments de câble, la conception des noeuds et autres
pièces de liaison en acier. La détermination des dimensions du
maillage et le calcul des découpes de câble fut d'abord envisagée
par utilisation de maquettes. Les risques d'erreur étant toutefois
trop importantes, de nouvelles méthodes de calcul ont été
employées (méthode des Densités de Forces entre autres, K.
Linkwitz Université de Stuttgart [LIN 76]).
Fig. I-2 Détail du réseau

10 Partie I
Fig. I-3 Tour de Schemehausen
Le second choix est beaucoup plus personnel; il
s'agit de la tour de la centrale nucléaire de
Schemehausen (Allemagne). D'une hauteur de 146m
pour un diamètre à sa base de 141m, elle est conçue
sur le principe des tours de refroidissement à sec et
possède ainsi des dimensions supérieures à celles des
tours de refroidissement humides de même capacité.
Une réalisation en béton armé aurait été certainement
des plus problématiques compte tenu de ces
caractéristiques.
Un habillage en tôle d'aluminium est ensuite placé sur la face interne du treillis.
Construite en 1974 par J. Schlaich [HOL 97], cette tour fut cependant démolie en 1991 suite à
la décision de réduire puis de stopper le programme nucléaire allemand.
I-1-2 La Méthode des Densités de Forces
L'étude de la géométrie d'équilibre des réseaux de câbles prétendus a été envisagée selon
diverses procédures : réalisation de maquettes [OTT 73], Recherche de Forme par approche
géométrique [KNE 92] ou mécanique (Méthode des Eléments Finis [HAU 72]-[LEO 88] ou
bien Relaxation Dynamique [BAR 75]).
Si la difficulté posée est essentiellement d'ordre numérique (résolution d'équations non
linéaires), une étape importante a toutefois été franchie en 1970 lorsque la Méthode des
Densités de Forces fut proposée. D'après une idée originale de K. Linkwitz [LIN 71] ensuite
reprise par H.J. Sheck [SHE 74], elle apporte une simplification dans l'écriture des équations
d'équilibre et permet un calcul rapide de la position des noeuds du réseau.
Le principe en est le suivant. On isole un noeud i du maillage où ci éléments de câble
sont connectés, chacun étant de longueur l j , soumis à une tension t j0 et relié au noeud 2 j
(figure I-4). La somme des actions exercées par les câbles sur le noeud i est égale à :
rx cj
l j
rX
rY
rZ
2 j
1i
Fig. I-4 Equilibre du
noeud i
r r rfi fii j
c
j
c
jj
c
cj
i i
t= =
= =
∑ ∑1
01
x (I-1)
La composante de rx cj sur l'axe global
rX étant x cjX
i
j
Xj
=2
l
(avec X X Xj j ii2 2 1= − ) il vient :
fiiXj
jj
c
i
tX
i
j=
=
∑0
12
l (I-2)
L'équilibre du noeud i imposant fiiX = 0 , on obtient une relation non linéaire pour déterminer
la valeur de Xi . L'idée consiste à linéariser cette équation en considérant le rapport :
qt
jj
jl
l=
0 (I-3)
Le terme q jl est appelé coefficient de densité de force pour l'élément de câble j.

Réseaux de câbles tendus et Recherche de Forme 11
A partir de là, on peut calculer Xi selon la forme simple :
X q q Xi jj
c
jj
ci
j
i
l l
= =
∑ ∑=
12
1
( ) (I-4)
L'extension de cette démarche à l'ensemble du réseau permet d'écrire une relation
matricielle de la forme :
[ ] D X DXl = (I-5)
où Xl désigne les coordonnées en rX des noeuds libres de la configuration d'équilibre; [ ]D
est fonction des coefficients q jl , DX également mais dépend aussi des coordonnées des
noeuds fixes. Une telle écriture se retrouve par analogie selon les axes rY et
rZ de la structure.
La résolution de cette équation peut être effectuée par inversion de [ ]D ou bien selon une
méthode itérative. Des relations plus détaillées sont présentées en annexe A.
La forme d'équilibre obtenue étant directement en relation avec les différents coefficients de
densités de force choisis, le concepteur peut ainsi la modifier à volonté sans changer les
conditions d'appui de la structure. De la même façon, il peut aussi gérer la courbure des câbles
de ralingue situés sur les côtés en faisant d'autres choix pour ces coefficients.
Fig. I-5a Maillage plan
Fig. I-5b Conditions d'appui
Fig. I-5c Forme calculée
Les figures I-5 illustrent la démarche suivie où, à partir d'un maillage initial plan auquel
sont spécifiées des conditions d'accrochage, la Méthode des Densités de Forces détermine une
possible géométrie d'équilibre.
Les tensions dans les éléments de câbles sont ensuite calculées d'après les relations (I-3).
Cette méthode se distingue par sa rapidité et sa facilité d'intégration au sein d'un logiciel
CAO de Recherche de Forme [PAU 94].
Une des répercussions immédiates a été d'envisager de l'étendre à l'étude des Membranes
Textiles Architecturales. Cette approche se fonde dès lors sur une hypothèse d'équivalence
entre un réseau de câbles tendus (représentation linéaire) et une toile tendue (représentation
surfacique).
Dès lors, une telle démarche suscite les questions suivantes :
- Une géométrie d'équilibre d'un réseau de câbles tendus peut-elle aussi correspondre à une
configuration d'équilibre d'une membrane tendue ?
- Connaissant les tensions existant dans les différents éléments de câble, comment évaluer la
distribution des contraintes de prétension au sein de la toile ?
Si ces aspects peuvent paraître de façon trompeuse secondaires aux yeux de l'architecte, ils
sont primordiaux pour le mécanicien.

12 Partie I
Il est en effet possible d'imaginer que, si ce Principe d'Equivalence n'est pas vérifié, des zones
de la membrane peuvent être localement détendues et ainsi susceptibles de posséder des plis.
Outre un préjudice esthétique certain, ces zones critiques présentent un risque potentiel de
formation de poches d'eau stagnante et ainsi porter atteinte à l'intégrité de l'édifice.
Ces problèmes sont abordés dans le chapitre suivant où il s'agit d'étudier la relation
Formes-Forces au sens univoque, c'est à dire poser la question suivante : quel état de
prétension correspond à une géométrie donnée ?
I-2 Etude des états d'autocontrainte et validité du Principe d'Equivalence
Avant toute chose, il convient de préciser ce que l'on entend par le vocable "membrane
tendue".
En considérant les valeurs principales σ1e et σ2
e du tenseur des contraintes de Cauchy défini
dans le repère local de l'élément, il faut que :
- σ σ1 0c c= >x pour tout élément de câble (approche linéaire) (I-6a)
- σ1 0m> et σ2 0m
> pour tout élément de membrane (approche surfacique)
Dans ce second cas, on montre que ces relations sont vérifiées si [MAU 95] :
σxm
> 0 , σym
> 0 et σ σ σx y xym m m
> ( ) 2 (I-6b)
I-2-1 Recherche des états d'autocontrainte
En l'absence de forces extérieures, l'équilibre mécanique d'un domaine Ω0 se traduit par
la relation :
Fint 00= (I-7)
où Fint 0 représente le vecteur généralisé des efforts internes sur la structure.
En description eulérienne sur Ω0 , on peut calculer le vecteur élémentaire des efforts
internes fie
0 d'après la relation (B-11) établie en annexe B où sont mis en place les
différents opérateurs et les grandeurs mécaniques utilisées.
[ ] fieLe T
V
eb dV
0 0 0
0
0
= ∫ σ (I-8)
Si on exprime le vecteur précontrainte de Cauchy dans le repère local de l'élément, il vient (en
considérant la matrice de passage relative aux contraintes définie en C-20) :
[ ] [ ] fieLe T
V
eloce
b T dV0 0 0 0
0
0
= ∫ σ σ' (I-9)

Réseaux de câbles tendus et Recherche de Forme 13
En considérant pour un élément de membrane σ σ σ σ σlocm T
locm T m m m
0 0 0 0 0= = x y xy et pour
un élément de câble σ σ σ σlocc
locc c c
0 0 0 0= = =x , nous écrivons :
[ ] fiee
eloc
ea
00
0 0= v σ (I-10)
où v0e représente le volume de l'élément sur Ω0 .
Après assemblage des relations élémentaires (I-10), il vient :
[ ] F locint 0 0 0= A σ (I-11)
La matrice [ ]A0
prend le nom de matrice d'équilibre du système; elle permet de déterminer
une base des vecteurs d'autocontrainte possibles, c'est à dire l'ensemble des vecteurs σ0 loc
pour lesquels il est vérifié :
[ ] A0 0 0σ loc = (I-12)
Pour cela, il suffit de rechercher le noyau de la matrice d'équilibre Ker A . Si le sous-espace
vectoriel ainsi engendré est vide, cela signifie que la configuration étudiée ne possède aucun
état d'autocontrainte.
Dans le cas contraire, il faut vérifier qu'il existe au moins un vecteur d'autocontrainte non nul
compatible, soit une combinaison linéaire des vecteurs de la base d'autocontrainte pour
laquelle tous les éléments de la structure sont en état de tension (relations I-6).
Si l'on considère que le domaine Ω0 est représenté de façon discrète (réseau de câbles
caractérisé par un sous-espace vectoriel d'autocontrainte Ker Ac ) ou selon une schématisation
continue (éléments de membrane), le Principe d'Equivalence suppose que :
∃ ≠ ∈σ0 0loccmp
Ker Ac et ∃ ≠ ∈σ0 0loccmp
Ker Am (I-13)
Nous allons à présent, sur un exemple concret, étudier si cette hypothèse est toujours vérifiée.
I-2-2 Validité du Principe d'Equivalence
La configuration proposée se compose de 9 noeuds, 8 éléments de câble en
représentation linéaire et 8 éléments triangulaires de membrane en mode surfacique.
Le tableau ci-contre donne les caractéristiques de
quelques noeuds (les autres s'en déduisant par symétrie
selon les axes X et Y, se rapporter à la figure I-6a).
Les cases en grisé correspondent à un blocage du noeud
selon la direction considérée.
Noeuds 1 2 3 4
0 02
31
0 2 0 2
1
21 0 0
X
Y
Z
− −
14 Partie I
rX
rY
rZ
1
7
2
6
4
5
37
6
1
84
2
3
5
8
9
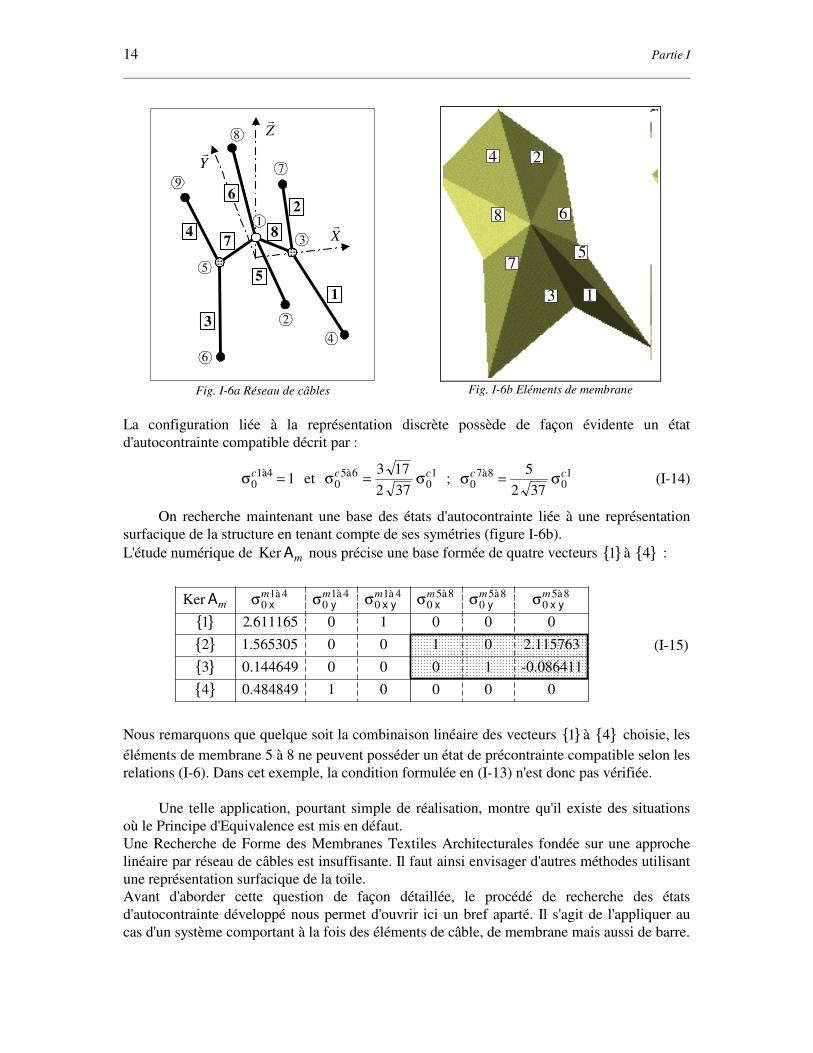
Fig. I-6a Réseau de câbles
1
2
3
7
4
5
8 6
Fig. I-6b Eléments de membrane
La configuration liée à la représentation discrète possède de façon évidente un état
d'autocontrainte compatible décrit par :
σ0 1c1à4
= et σ σ05 6
0
3 17
2 37
c cà 1= ; σ σ0
7 80
5
2 37
c cà 1= (I-14)
On recherche maintenant une base des états d'autocontrainte liée à une représentation
surfacique de la structure en tenant compte de ses symétries (figure I-6b).
L'étude numérique de Ker Am nous précise une base formée de quatre vecteurs 1 à 4 :
Ker
1.565305 2.115763
0.144649 -0.086411
0.484849
1à 4 1à 4 1à 4 à à àA x y x y x y x ymm m m m m m
σ σ σ σ σ σ0 0 0 05 8
05 8
05 8
1 2 611165 0 1 0 0 0
2 0 0 1 0
3 0 0 0 1
4 1 0 0 0 0
.
(I-15)
Nous remarquons que quelque soit la combinaison linéaire des vecteurs 1 à 4 choisie, les
éléments de membrane 5 à 8 ne peuvent posséder un état de précontrainte compatible selon les
relations (I-6). Dans cet exemple, la condition formulée en (I-13) n'est donc pas vérifiée.
Une telle application, pourtant simple de réalisation, montre qu'il existe des situations
où le Principe d'Equivalence est mis en défaut.
Une Recherche de Forme des Membranes Textiles Architecturales fondée sur une approche
linéaire par réseau de câbles est insuffisante. Il faut ainsi envisager d'autres méthodes utilisant
une représentation surfacique de la toile.
Avant d'aborder cette question de façon détaillée, le procédé de recherche des états
d'autocontrainte développé nous permet d'ouvrir ici un bref aparté. Il s'agit de l'appliquer au
cas d'un système comportant à la fois des éléments de câble, de membrane mais aussi de barre.

Réseaux de câbles tendus et Recherche de Forme 15
I-2-3 Etude d'un système hybride
Le vocabulaire architectural s'est enrichi des dernières années d'un nouveau terme : les
Systèmes de Tenségrité. Ces structures se caractérisent également par l'utilisation de la
précontrainte en tant que principe constructif. Les configurations les plus courantes sont
fondées sur l'association de plusieurs modules de base, le plus simple d'entre eux étant appelé
Fig. I-7a Simplex
Simplex [VAS 97].
Ce système comporte 3 éléments de barre soumis à de la
compression, des nappes supérieure et inférieure de câbles de
longueurs identiques (6 éléments au total) ainsi que 3 autres câbles
dits "d'entretoisement".
Il possède bien entendu une géométrie d'équilibre Ω0 avec un état
d'autocontrainte compatible (figure I-7a).
L'idée consiste à remplacer les deux nappes de câbles par deux
éléments de membrane et à déterminer alors les éventuels états
d'autocontrainte (figure I-7b).
Afin de simplifier les calculs nous allons envisager un cas particulier où :
σ σ σ σ σ0 00
00 0 00loc
m T
isom T m m m
= = = (soit σ σ σ0 0 0x ym m m
= = et σ0 0xym
= ) (I-16)
Un tel vecteur élémentaire de prétension est dit isotrope, il est aussi forcément compatible si
σ0 0m> .
On formule à nouveau (I-9) en utilisant (C-21), il suit :
[ ] fiem iso
miso
ma
00
0 0= v σ avec [ ] [ ] a b Tisom
Lm T
isom
0 0 0=
σ' (I-17)
8
7
65
4
12
3
rZ
rX
rY
6
1
5
2
4
3
Fig. I-7b Structure hybride
Noeuds 1 2 3 4 5 61
2
1
20
1
3
1
2 3
1
2 31
2 3
1
2 3
1
30
1
2
1
2
0 0 01 3
3
1 3
3
1 3
3
X
Y
Z
− −
− − −
+ + +
Les caractéristiques des noeuds sont données dans le
tableau ci-dessus (en m). Dans le cas particulier des
structures hybrides, on doit spécifier les dimensions
des éléments, soit une section sc = 1 2cm pour les
barres ainsi que les câbles et une épaisseur
ep mmm = 1 pour les membranes.
16 Partie I
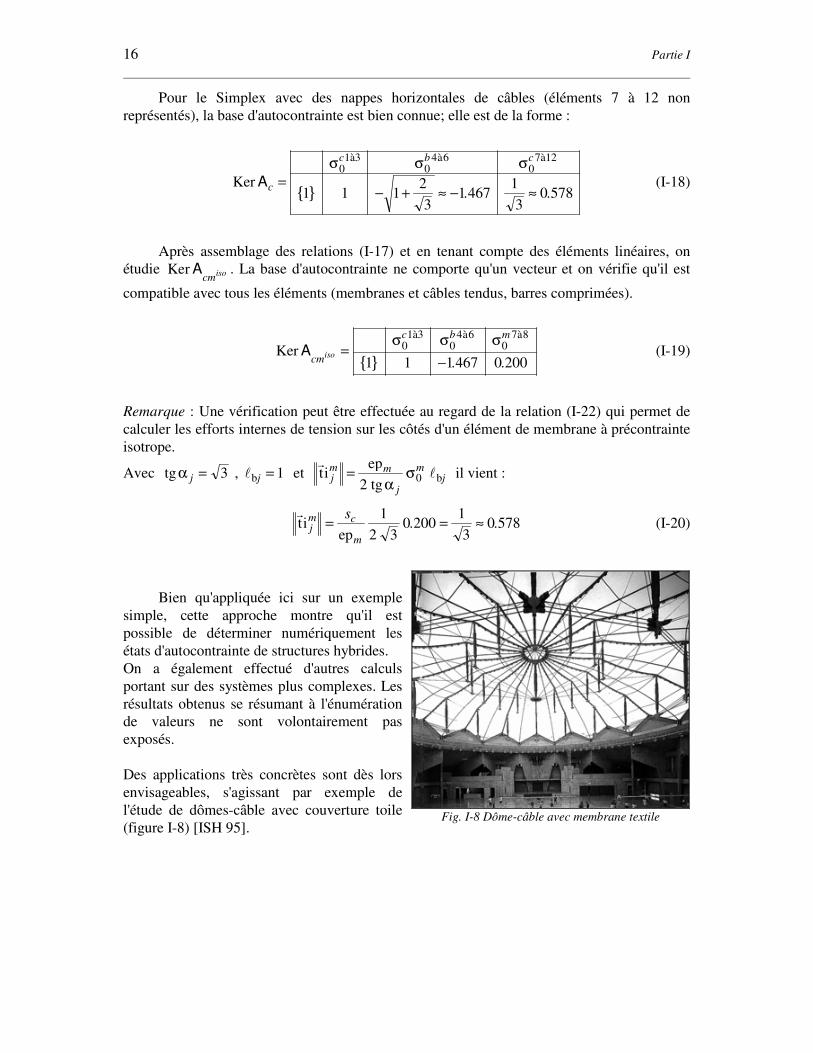
Pour le Simplex avec des nappes horizontales de câbles (éléments 7 à 12 non
représentés), la base d'autocontrainte est bien connue; elle est de la forme :
Ker
1à3 à à
Ac
c b c
=− + ≈ − ≈
σ σ σ0 04 6
07 12
1 1 12
31 467
1
30 578. .
(I-18)
Après assemblage des relations (I-17) et en tenant compte des éléments linéaires, on
étudie Ker Acm
iso . La base d'autocontrainte ne comporte qu'un vecteur et on vérifie qu'il est
compatible avec tous les éléments (membranes et câbles tendus, barres comprimées).
Ker
1à3 à à
Acm
c b m
iso =−
σ σ σ0 04 6
07 8
1 1 1 467 0 200. . (I-19)
Remarque : Une vérification peut être effectuée au regard de la relation (I-22) qui permet de
calculer les efforts internes de tension sur les côtés d'un élément de membrane à précontrainte
isotrope.
Avec tgα j = 3 , lbj = 1 et r
ltiep
tgbj
m m
j
mj=
20
ασ il vient :
rti
epjm c
m
s= = ≈
1
2 30 200
1
30 578. . (I-20)
Bien qu'appliquée ici sur un exemple
simple, cette approche montre qu'il est
possible de déterminer numériquement les
états d'autocontrainte de structures hybrides.
On a également effectué d'autres calculs
portant sur des systèmes plus complexes. Les
résultats obtenus se résumant à l'énumération
de valeurs ne sont volontairement pas
exposés.
Des applications très concrètes sont dès lors
envisageables, s'agissant par exemple de
l'étude de dômes-câble avec couverture toile
(figure I-8) [ISH 95].
Fig. I-8 Dôme-câble avec membrane textile

Recherche de Forme des Membranes Textiles Architecturales 17
I-3 Recherche de Forme des Membranes Textiles Architecturales
I-3-1 Quelques réalisations
Forcé de constater, une fois de plus, que ce ne sont pas forcément les édifices les plus
difficiles à concevoir qui sont aussi les plus agréables à nos sens, et qu'il est des ouvrages bien
plus simples en totale harmonie avec leur environnement et leurs impératifs fonctionnels, c'est
toutefois avec le regard du technicien que le choix s'est porté sur quelques réalisations
significatives.
Fig. I-9 Haj Terminal
La première structure illustre, de par ses dimensions
imposantes, le potentiel des constructions légères. Tous
ceux pensant cantonner ce type de réalisation dans des
rôles mineurs seront surpris par la couverture en toile du
Haj Terminal de l'aéroport de Djeddah en Arabie Saoudite
(figure I-9).
Conçu en 1981 par H. Berger, cet ouvrage fut l'occasion
d'apporter de nombreux éléments de réponse à des
problèmes d'ordre mécanique ou thermique [HOL 97].
La couverture du stade de Tokyo représente, dans
un pays où l'Architecture Textile est largement implantée,
la figure de proue des réalisations à base de membranes
gonflables.
D'une surface supérieure à 28 000 m2, le toit allie une
structure en câbles avec une toile de type fibre de verre-
Téflon; il fut conçu en 1988 par N. Sekkei [ISH 95].
Fig. I-10 Tokyo dôme
Fig. I-11 Couverture du Zénith
La France, de son côté, se distingue par une
certaine frilosité en la matière. Cette situation
semble néanmoins évoluer de façon progressive et
quelques constructions apparaissent à nos yeux,
certains regretteront toutefois que leur financement
repose essentiellement sur des fonds publics. On
citera volontiers la couverture des salles de
spectacle de type Zénith (figure I-11) [PIC 97].

18 Partie I
I-3-2 Les différents procédés de Recherche de Forme
Les premières approches que l'on pourrait qualifier de vraiment rigoureuses ont fait leur
apparition vers ce milieu de siècle. Elles étaient fondées sur l'étude de modèles physiques tels
que des maquettes en voile léger ou bien des films de savon censés décrire la géométrie ainsi
que la distribution des contraintes au sein de la toile. Menés en majeure partie sous l'impulsion
de F. Otto, ces travaux ont par ailleurs apporté bien des éclaircissements et permis de
construire avec succès de nombreux ouvrages [OTT 73].
Les développements rapides de l'informatique ont par la suite entraîné la prédominance
du calcul par l'apparition de modèles et méthodes numériques.
Nous laissons bien entendu de côté toute les formulations faisant appel à une représentation
linéaire du problème à l'image de la Méthode des Densités de Forces [NGU 79].
E. Haug et G. Powell ont les premiers mis en évidence en 1972 un procédé de Recherche de
Forme par utilisation de la Méthode des Eléments Finis dans un contexte d'analyse statique
non linéaire d'ordre géométrique [HAU 72].
Peu de temps après (1975), M.R. Barnes a défini une approche fondée sur la méthode dite de
Relaxation Dynamique auparavant proposée par A. DAY [BAR 75 et 80], [DAY 65].
Formulée d'après l'écriture des équations d'équilibre de la structure en dynamique, cette
démarche peut toutefois se résumer elle aussi en une analyse non linéaire.
Ces deux approches présentent cependant de nombreux inconvénients.
Pour l'ingénieur tout d'abord, car elles ne permettent pas de contrôler l'état de prétension de la
toile ainsi calculée et certaines zones peuvent alors se retrouver en compression. La géométrie
d'équilibre est en effet obtenue par déformations successives d'une configuration initiale en
agissant sur ses conditions aux limites.
L'architecte sera également sensiblement dérouté par ces méthodes où la forme créée n'est que
très peu prévisible à l'avance. Si elle ne lui convient pas, il devra alors redéfinir un nouveau
maillage initial.
Il faut également souligner que ces approches réclament l'utilisation de logiciels souvent
complexes et de temps de calcul élevés, sauf recours à de puissants outils informatiques. Cela
dit, excepté les méthodes liées à une représentation linéaire qui sont majoritaires, elles
constituent la quasi totalité des autres codes de calcul que l'on rencontre dans les bureaux
d'étude ou autres cabinets d'ingénierie.
Désirant pallier ces inconvénients, R. Haber et J. Abel ont suggéré en 1982 un procédé
alors réputé apporter réponse sur de nombreux points. La démarche se veut en effet être
indépendante du matériau et permettre au concepteur de spécifier la distribution des
contraintes sur la membrane [HAB 82]. Les exemples présentés par les auteurs de la méthode
semblent d'ailleurs aller dans ce sens. On constate toutefois que les applications sont restées
très marginales.
Beaucoup plus récents, les travaux menés par K.U. Bletzinger sur des méthodes dites
d'Homotopie ou d'URS (Updated Reference Strategy) sont porteurs de beaucoup de
promesses. Mis à part une certaine complexité des calculs à effectuer, l'approche mécanique
est innovante, audacieuse et ouvre ainsi de nombreuses perspectives [BLE 97].

Recherche de Forme des Membranes Textiles Architecturales 19
Ayant la volonté de présenter une nouvelle méthode de Recherche de Forme pour les
Membranes Textiles Architecturales, nous avons retenus les critères suivants :
- Il faut avoir un contrôle suffisant du champ de prétension engendré dans la toile pour éviter
toutes zones en compression.
- La possibilité de gérer de façon rapide et interactive les différentes formes obtenues doit être
offerte au concepteur.
Nous remarquons immédiatement que le premier aspect est validé si l'on a des vecteurs de
précontraintes compatibles pour chaque élément de membrane, et tout particulièrement si il
s'agit de tenseurs isotropes de la forme σ σ σ0 0 0 0isom T m m
= avec σ0 0m> .
Cette condition est à la base de la méthode suggérée et que nous allons décrire dans le chapitre
suivant.
I-3-3 La Méthode des Densités de Contraintes Surfaciques
I-3-3-1 Expression des efforts internes dans le cas d'une prétension isotrope
-a- Equilibre d'un élément de membrane Si l'on écrit la relation (I-9) pour un élément de membrane dans son repère local (figure
I-12a), il suit :
rx m
1
32
rfi1
m
rfi2
mrfi3
m
rym
Fig. I-12a Efforts internes
fi
fi
fi
fi
locm
m
m
m0
1
2
30
=
r
r
r avec
rfi
ep1
00 23
0
2
0
0
m m mx=
σ (I-21)
rfi
ep2
00
13
31
0
20
m m m
y
x=
σ et rfi
ep3
00
21
12
0
20
m m m
y
x=
σ
Il est possible de projeter les vecteurs rfi j
m sur les côtés du triangle (figure I-12b); on calcule
les valeurs des tensions ti j par :
r
ltiep
tgbj
m m
j
mj=
20
ασ (I-22)
En considérant les vecteurs normés rn j associés aux hauteurs du triangle (figure I-12c) :
r
lr
fiep
bjm m m
j jn= −2
0σ (I-23)
Remarques : - Si l'on désire exprimer la composante des efforts internes rfi j
m dans le repère
global lié à la structure, il suffit d'écrire le vecteur rn j dans celui-ci.
- Au cours des parties I et II de ce mémoire, la configuration d'équilibre sera toujours Ω0 ;
aussi le terme 0 n'apparaitra plus en indice des quantités exprimées.

20 Partie I
1
32
α1
α2 α3
ti1 ti1
ti2
ti2
ti3
ti3
lb3lb2
lb1
Fig. I-12b Tensions sur les côtés
1
32
rn1
rn2
rn3
lh1
lb1
lb2
lb3
4lt
Fig. I-12c Projection orthogonale
Avec le point 4, intersection de la hauteur lh1 associée au noeud 1 et à son côté opposé, on
peut écrire :
r l
llfi
ep epb
hb1 0
1
11
2 0
214
414m m m m
m
ms=
→
=
→
σσ
(I-24)
Le terme σ0
m
ms est le rapport entre la contrainte isotrope de l'élément et son aire. Cette
considération est au coeur de la nouvelle approche proposée où, par extension de la Méthode
de Densités de Forces, nous désignons le rapport :
qs
sm
m
m
=σ0 (I-25)
comme le coefficient de densité de contrainte surfacique associé à l'élément.
rX
rY
rZ
3 j
2 j
1irfi1 j
m
lbj 4 j
Fig. I-13 Equilibre du noeud i
-b- Equilibre nodal
Si l'on étudie maintenant une configuration avec
mi éléments de membrane reliés au même noeud i
(figure I-13), la résultante des efforts internes en ce
point s'interprète selon :
r r
lfi fiep
bi jm
j
mm
sj j i jj
mi i
q= == =
∑ ∑→
11
2
141 4 (I-26)
Comme l'on peut calculer :
X X Xj j j j
j
j4 2 3 2= +
l
l
t
b
où ll
tb
jj
jj j i= ⋅→ →1
2 3 2 1 (I-27)
Nous définissons alors les quantités :
N q XXi sj jj
mi
j=
=
∑ lb2
14 et D qi sj j
j
mi
==
∑ lb2
1
(I-28)
Ce qui permet d'écrire les composantes de la résultante des efforts internes appliqués sur le
noeud i :
( )rfi
epiXm
Xi i imN D X= −
4 ; ( )rfi
epiYm
Yi i imN D Y= −
4 et ( )
rfi
epiZm
Zi i imN D Z= −
4 (I-29)

Recherche de Forme des Membranes Textiles Architecturales 21
La recherche de la position d'équilibre du noeud i s'effectue en considérant qu'elle
correspond à r rfii = 0 , soit les relations :
XN
Di
Xi
i
= ; YN
Di
Yi
i
= et ZN
Di
Zi
i
= (I-30)
On détermine ainsi une nouvelle position du noeud i pour laquelle on recalcule les
composantes de rfii selon (I-29). La procédure itérative est arrétée lorsque ce vecteur est
suffisamment proche du vecteur nul, ce qui suppose bien entendu une convergence du
processus.
I-3-3-2 Etude de la convergence
Nous allons à présent établir de façon détaillée les équations qui traduisent l'évolution
des paramètres tout au long du procédé itératif.
A l'itération (p+1) on peut écrire :
XN
D
q X
q
iXi
i
sj jj
m
sj jj
m
j
i
i
(p 1)(p) b
(p)
b
+ =
=
= =
∑
∑
l
l
24
1
2
1
(I-31)
En considérant Qq
q
sjsj
sj jj
mi=
=
∑ lb2
1
il suit :
X A X A Y A Z Bi XXi i XYi i XZi i Xi(p 1) (p) (p) (p)+
= + + + (I-32)
avec :
A Q X
A Q X Y
A Q X Z
B Q Y X Y X Y Z X Z X Z
XXi sjj
m
XYi sjj
m
XZi sjj
m
Xi sjj
m
i
j j
i
j j j j
i
j j j j
i
j j j j j j j j j j j j
=
=
=
= − + −
=
=
=
=
∑
∑
∑
∑
13 22
13 2 3 2
13 2 3 2
12 3 3 2 2 3 2 3 3 2 2 3
( )
( )
( )
( ) ( )( )
(I-33)
De façon identique, on peut calculer les autres coordonnées du noeud i pour l'itération (p+1) :
Y A X A Y A Z B
Z A X A Y A Z B
i YXi i YYi i YZi i Yi
i ZXi i ZYi i ZZi i Zi
(p 1) (p) (p) (p)
(p 1) (p) (p) (p)
+
+
= + + +
= + + +
(I-34)

22 Partie I
où l'on définit :
−+−=
−+−=
===
=
=
=
∑
∑
∑
∑
∑
=
=
=
=
=
)(
)(
)()(
)()(
;;
)(
)(
)(
233232233232
1
322332233232
1
2
231
2323
1
2
231
jjjjjjjjjjjj
i
jjjjjjjjjjjj
i
jj
i
jjjj
i
jj
i
ZYZYYZXZXXQB
ZYZYZYXYXXQB
AAAAAA
ZQA
ZYQA
YQA
m
j
sjZi
m
j
sjYi
YZiZYiXZiZXiXYiYXi
m
j
sjZZi
m
j
sjYZi
m
j
sjYYi
(I-35)
Ces équations peuvent se mettre sous la forme matricielle :
X
Y
Z
A A A
A A A
A A A
X
Y
Z
B
B
B
i
i
i
XXi XYi XZi
YXi YYi YZi
ZXi ZYi ZZi
i
i
i
Xi
Yi
Zi
(p 1)
(p 1)
(p 1)
(p)
(p)
(p)
+
+
+
=
+
ou [ ] X Xi i i iA B(p 1) (p)+
= + (I-36)
Si le vecteur X i( )0 caractérise la position initiale du noeud i, il vient :
[ ] [ ] X Xi i i ik
k
p
iA A B(p 1) p ( ) ( )+ +
=
= + ∑1 0
0
avec [ ] [ ]A Idik
= 3 pour k = 0 (I-37)
[ ] [ ] [ ] X X Xi i i i i iA A Id B(p 1) (p) p ( )( )( )+
− = − +30 (I-38)
L'annexe E montre que les termes de [ ]Ai vérifient [ ] [ ]limp
p
→∞=Ai 03 , ce qui signifie que le
processus converge vers la position d'équilibre du noeud i. Nous emploierons à ce propos la
terminologie de convergence locale.
A partir de (I-37) il vient :
[ ] [ ] [ ] [ ] [ ][ ] X Xi i i i i iA Id A Id A B(p 1) p ( ) p( )+ + + −
= + − −1 0
31
3
1 (I-39)
[ ] [ ] [ ][ ] [ ] [ ][ ] X Xi i i i i i iA Id A B Id A B(p 1) p ( )( )+ + − −
= − − + −1 0
3
1
3
1 (I-40)
qui tend à l'inifini vers :
[ ] [ ][ ] limp
(p)
→∞
−= −X i i iId A B3
1 (I-41)
Nous avons ainsi la relation fondamentale d'équilibre nodal :
[ ] [ ][ ] Xi = −−
Id A Bi i3
1 (I-42)
Recherche de Forme des Membranes Textiles Architecturales 23
Cette équation qui permet de déterminer la position d'équilibre du noeud i est à la base
de la Méthode des Densités de Contraintes Surfaciques.
Son écriture simplifiée (la seule opération "complexe" réside dans l'inversion d'une matrice
3x3) autorise un calcul rapide du vecteur Xi . Deux éventualités se présentent alors :
- Soit le concepteur souhaite utiliser la démarche itérative définie en (I-30) et a ainsi la
possibilité de l'arrêter lorsque le vecteur des efforts internes est inférieur à un seuil demandé.
- Soit il désire obtenir une précision maximale, ce qui suppose une poursuite des itérations à
l'infini, et il peut dans ce cas utiliser la relation d'équilibre à l'infini (I-42).
Le choix relève en fait d'un compromis entre le temps de calcul imparti et la précision voulue.
Lorsque la position d'équilibre est atteinte, les aires des différents éléments sont
évaluées et permettent de calculer les valeurs des contraintes isotropes par :
σ0 j sj jq s= (I-43)
Cette procédure est appliquée à chaque noeud libre de la structure jusqu'à ce que la
forme de l'ensemble atteigne une position de convergence. Si c'est le cas, nous parlerons de
convergence globale du processus.
L'équation (I-42) montre que cette géométrie finale est obtenue directement en relation avec
les différentes valeurs attribuées aux coefficients de densités de contraintes surfaciques qsj
par l'intermédiaire des matrices [ ]Ai et des vecteurs Bi . Comme dans la Méthode des
Densités de Forces, le concepteur a ainsi la possibilité de modifier la forme d'équilibre en
agissant sur les coefficients qsj , et ce sans modifier les conditions d'appui du système.
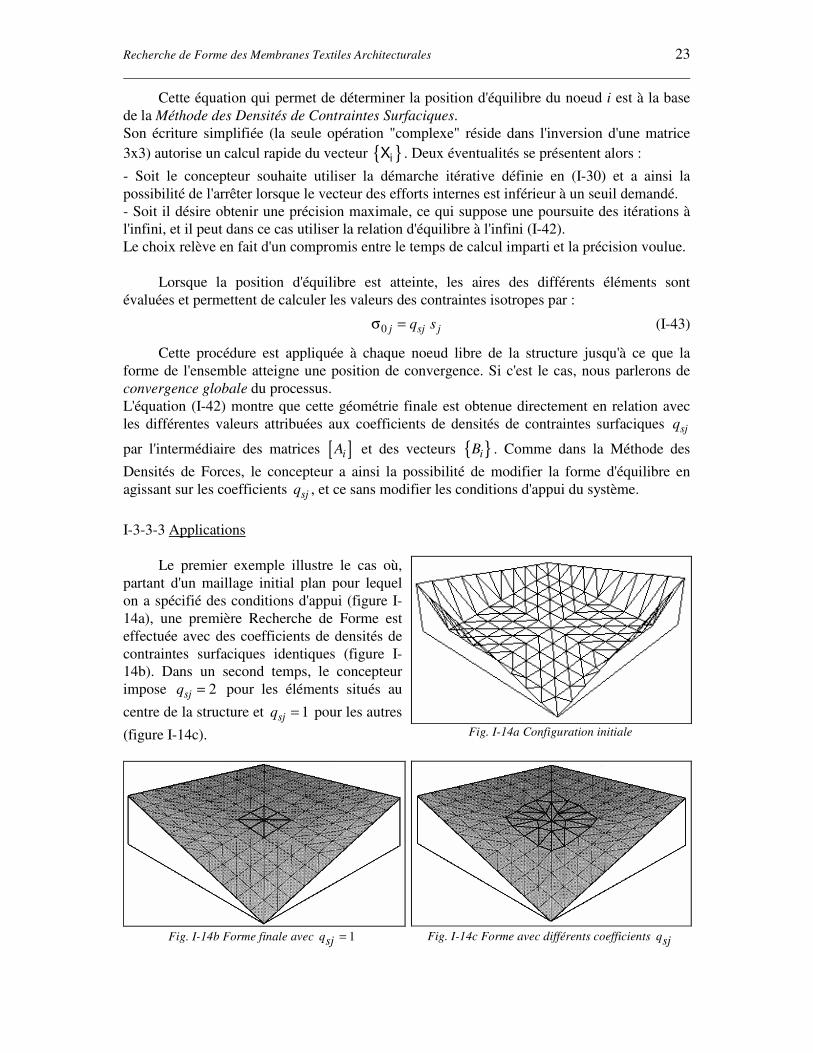
I-3-3-3 Applications
Le premier exemple illustre le cas où,
partant d'un maillage initial plan pour lequel
on a spécifié des conditions d'appui (figure I-
14a), une première Recherche de Forme est
effectuée avec des coefficients de densités de
contraintes surfaciques identiques (figure I-
14b). Dans un second temps, le concepteur
impose qsj = 2 pour les éléments situés au
centre de la structure et qsj = 1 pour les autres
(figure I-14c).
Fig. I-14a Configuration initiale
Fig. I-14b Forme finale avec qsj = 1
Fig. I-14c Forme avec différents coefficients qsj

24 Partie I
Figs. I-15 Quelques configurations calculées par la MDCS
Les figures I-15 mettent en évidence d'autres applications où différentes variétés de
formes sont obtenues.
C'est aussi l'occasion de signaler que toutes les géométries initiales employées tout au long de
ces travaux de thèse ont été conçues par utilisation de la Formex Algèbre. Cet outil
(comprendre Algèbre des Formes) s'avère en effet parfaitement adapté à la génération de telles
structures spatiales, alliant à la fois des qualités de rapidité, simplicité et efficacité [NOO 93].
Le processus de conception repose sur l'utilisation de schémas paramétrés et offre une grande
diversité dans les géométries et Structures Relationnelles engendrées.
La parole peut ainsi être donnée en toute confiance à l'Architecte, sachant que les
configurations qu'il va déterminer par la Méthode des Densités de Contraintes Surfaciques
offrent toutes les garanties souhaitées en termes de mécanique.
Il est d'ailleurs possible d'illustrer ce propos avec un exemple simple.
La figure I-16a représente une toile plane fixée sur ses côtés et sur un noeud central en
position haute. Le calcul de la position d'équilibre du système dans le cadre d'une
schématisation discrète (Méthode des Densités de Forces) mène à une géométrie
d'autocontrainte (figure I-16b).
Fig. I-16a Maillage initial
Fig. I-16b Représentation linéaire
Fig. I-16c Mode surfacique
Cependant, ce résultat peut paraître assez troublant à toute personne ayant déjà été confrontée
à la réalisation de toiles tendues, ne serait-ce que par l'intermédiaire de maquettes en tissu.
Nous savons en effet qu'une telle configuration entraîne forcément l'apparition de plis au sein
de la toile. Si l'on effectue maintenant une Recherche de Forme selon une représentation

Recherche de Forme des Membranes Textiles Architecturales 25
continue du milieu, en l'occurrence d'après la Méthode des Densités de Contraintes
Surfaciques, nous remarquons que le processus ne peut converger globalement vers une
position d'équilibre. Cela traduit le fait qu'il ne peut exister une base d'autocontrainte fondée
sur l'utilisation de tenseurs de prétension isotropes et qu'il serait alors nécessaire de prendre en
considération des termes de cisaillement avec bien entendu un risque potentiel de zones de la
membrane en état de compression.
Il est ainsi constaté que ce simple exemple met en défaut, une fois de plus (cf I-2-2), le
Principe d'Equivalence formulé en (I-13). La divergence globale de la Méthode des Densités
de Contraintes Surfaciques sert heureusement dans le cas présent de garde-barrière en évitant
au concepteur de commettre des erreurs préjudiciables.
I-3-3-4 Combinaison avec la Méthode des Densités de Forces
Cette partie traite le cas pour lequel des câbles de ralingue sont situés sur les côtés de la
toile. Nous allons considérer une configuration avec mi éléments de membranes et ci
éléments de câble reliés au noeud i et aux noeuds repérés 5 (figure I-17).
rX
rY
rZ
3 j
2 j
1i
rfi1 j
m
lbj 4 j5 j
rfi1j
c
Fig I-17 Eléments de câble
La somme des efforts internes exercés au noeud i
s'écrit :
r r rl lfi fi fi
epbi
m
j
mc
j
cm
sj jj
m
i j j i jj
c
j
i
j
i i i
q q= + = +
= = = =
∑ ∑ ∑ ∑→ →
11
11
2
1 141 4 1 5 (I-44)
Les équations d'équilibre (r rfii = 0 ) nous donnent les mêmes
relations (I-30) mais avec :
N q X q X
N q Y q Y
N q Z q Z
Xi sj jj
m
jj
c
Yi sj jj
m
jj
c
Zi sj jj
m
jj
c
i
j j
i
i
j j
i
i
j j
i
= +
= +
= +
= =
= =
= =
∑ ∑
∑ ∑
∑ ∑
l
l
l
l
l
l
b
b
b
2
14 5
1
2
14 5
1
2
14 5
1
et D q qi sj jj
m
jj
ci i
= += =
∑ ∑l lb2
1 1
(I-45)
Dans ce cas aussi, on peut déterminer la position du noeud i de façon itérative ou par
résolution du système (I-42). Il est en effet possible de montrer que les termes de la matrice
[ ]Ai sont tels que [ ] [ ]limp
p
→∞=Ai 03 est toujours vérifié (cf. annexe E).
Cette approche combinée permet au concepteur de gérer tout à la fois la courbure des câbles
de ralingue situés en périphérie (en agissant sur les coefficients q jl ) ainsi que de modifier
localement la forme de la toile (coefficients qsj ).

26 Partie I
Nous allons illustrer cette possibilité par l'exemple suivant. Il s'agit d'une structure de 20
par 10 dont les noeuds positionnés sur les côtés de plus grande longueur sont fixes et
décrivent un arc de cercle avec une hauteur maximale de 5 (noeuds repérés o ). Des ralingues
sont également disposées sur les côtés transversaux (entre les noeuds extrêmes marqués • ).
Fig. I-18a qsj = 1 et q jl = 6
Fig. I-18b qsj = 1 et q jl = 25
Fig. I-18c qsj = 1 et q jl = 100
Une première forme est calculée avec tous les coefficients qsj égaux à 1 et les coefficients q jl
à 6. Dans ce cas, la flèche résultante au niveau des câbles de ralingue est de 2 (figure I-18a). Si
l'on précise maintenant que q jl = 25 elle devient égale à 1 (figure I-18b) puis chute à une
valeur de 0.5 si q jl = 100 (figure I-18c).
I-3-3-5 Calcul de Structures Gonflables
Le propos est à présent consacré au cas particulier des structures pneumatiques dont la
position d'équilibre dépend de l'action d'efforts extérieurs de pression.
La détermination des efforts internes exercés en chaque noeud s'effectue en ajoutant à (I-26)
un terme supplémentaire dû aux composantes normales à chaque élément de membrane (axe
local rzm ) et proportionnel à sa surface ainsi qu'à la valeur de la pression P. On écrit alors :
r r r
lr
fi fiep
( )bim
j
mj
mjj
mm
sj j i j
jmj
j
m
j
i i iP sq
P s= + =
= = =
∑ ∑ ∑→
+11 1
2
13 41 4
3z z (I-46)
Nous sommes toutefois confrontés ici à un problème nouveau car, si jusqu'à présent le
procédé de Recherche de Forme nous permettait d'obtenir une base relative à un état
d'autocontrainte (les unités pouvant être considérées comme "libres"), le fait d'introduire des
termes de pression (avec des unités précises) implique une définition rigoureuse des unités
choisies.
La démarche proposée est la suivante :
- On estime tout d'abord sur le maillage plan initial la surface moyenne des éléments ( )
smoy1
et,
en considérant une valeur de précontrainte de la toile σ0m , les coefficients de densités de
contraintes surfaciques par :
( )
( )q
ssj
m1 0
1=
σ
moy
(I-47)
- Un premier calcul est réalisé; la forme obtenue permet d'avoir une seconde estimation de la
surface moyenne élémentaire ( )
smoy2
et ainsi d'attribuer de nouvelles valeurs aux coefficients
( )q sj
2 selon (I-47).
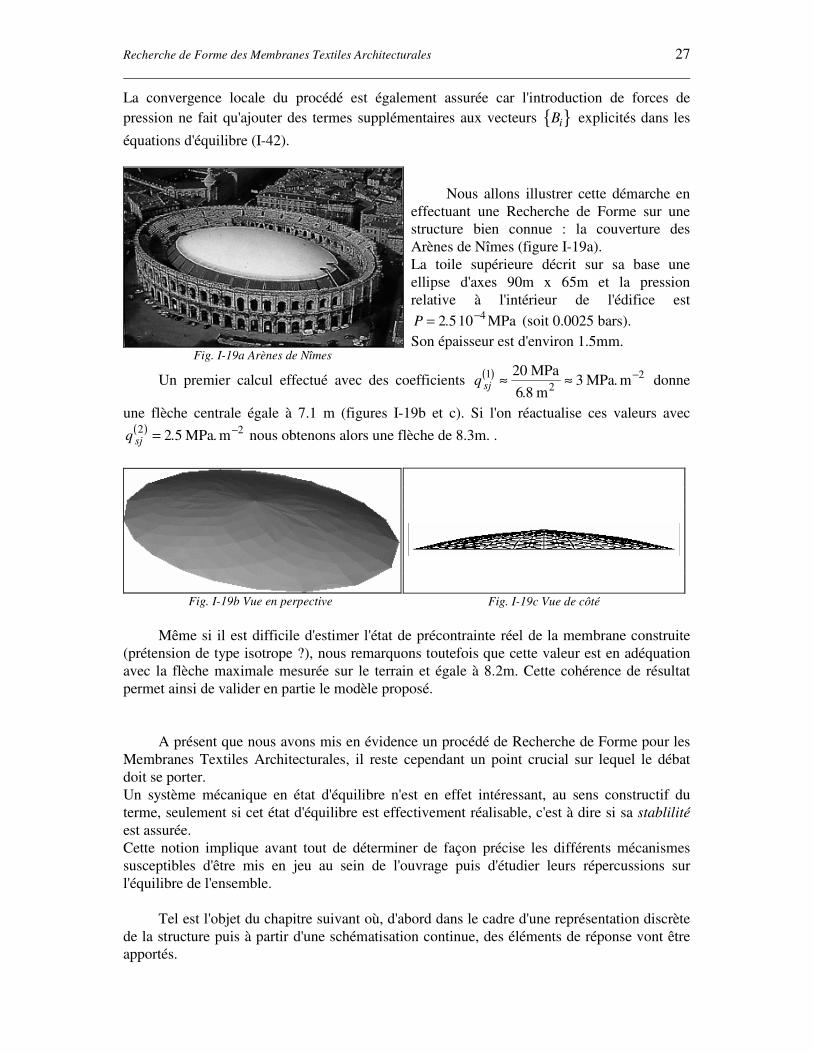
Recherche de Forme des Membranes Textiles Architecturales 27
La convergence locale du procédé est également assurée car l'introduction de forces de
pression ne fait qu'ajouter des termes supplémentaires aux vecteurs Bi explicités dans les
équations d'équilibre (I-42).
Fig. I-19a Arènes de Nîmes
Nous allons illustrer cette démarche en
effectuant une Recherche de Forme sur une
structure bien connue : la couverture des
Arènes de Nîmes (figure I-19a).
La toile supérieure décrit sur sa base une
ellipse d'axes 90m x 65m et la pression
relative à l'intérieur de l'édifice est
P =−2 510 4
. MPa (soit 0.0025 bars).
Son épaisseur est d'environ 1.5mm.
Un premier calcul effectué avec des coefficients ( )
q sj1 220
6 83≈ ≈
−MPa
mMPa m
2.. donne
une flèche centrale égale à 7.1 m (figures I-19b et c). Si l'on réactualise ces valeurs avec ( )
q sj2 22 5=
−. .MPa m nous obtenons alors une flèche de 8.3m. .
Fig. I-19b Vue en perpective
Fig. I-19c Vue de côté
Même si il est difficile d'estimer l'état de précontrainte réel de la membrane construite
(prétension de type isotrope ?), nous remarquons toutefois que cette valeur est en adéquation
avec la flèche maximale mesurée sur le terrain et égale à 8.2m. Cette cohérence de résultat
permet ainsi de valider en partie le modèle proposé.
A présent que nous avons mis en évidence un procédé de Recherche de Forme pour les
Membranes Textiles Architecturales, il reste cependant un point crucial sur lequel le débat
doit se porter.
Un système mécanique en état d'équilibre n'est en effet intéressant, au sens constructif du
terme, seulement si cet état d'équilibre est effectivement réalisable, c'est à dire si sa stablilité
est assurée.
Cette notion implique avant tout de déterminer de façon précise les différents mécanismes
susceptibles d'être mis en jeu au sein de l'ouvrage puis d'étudier leurs répercussions sur
l'équilibre de l'ensemble.
Tel est l'objet du chapitre suivant où, d'abord dans le cadre d'une représentation discrète
de la structure puis à partir d'une schématisation continue, des éléments de réponse vont être
apportés.

28 Partie I
I-4 Stabilité des Membranes Textiles Architecturales
I-4-1 Rappels sur l'étude de la stabilité des équilibres
L'étude de la stabilité d'un système conservatif peut s'envisager en utilisant le théorème
de Lejeune-Dirichlet où il est démontré que, si l'énergie potentielle du système admet un
minimum strict en une position d'équilibre, alors cette position d'équilibre est stable [BAM
81].
Dans le cas considéré, les sollicitations extérieures étant considérées comme nulles, l'écriture
de l'énergie potentielle du système se résume à celle de son énergie de déformation Wd
provenant des efforts internes.
La configuration d'équilibre dont on désire tester la stabilité, déterminée selon un procédé de
Recherche de Forme, prend l'appellation de position de référence.
Comme les déplacements des noeuds sont nuls dans cette position, son énergie de déformation
est également nulle. Aussi suffit-il que ( )Wd d soit définie positive selon un déplacement
d pris dans un voisinage de la position de référence pour que l'énergie potentielle du
système admette un minimum strict.
De plus, il a déjà été démontré que la définition et l'indéfinition d'une fonction
analytique dépendait des termes de plus bas degré de son développement [CAP 90]. Cela
signifie ainsi que si la partie principale de cette fonction est une forme définie positive, alors
cette fonction est elle même définie positive.
Aussi, suffira t-il par la suite de considérer seulement les termes liés à la partie principale de
l'énergie de déformation Wd , c'est à dire ses termes de plus petit ordre.
Lorsqu'il est précisé que les déplacements d appartiennent au voisinage de la position
de référence, cela implique que cette étude de stabilité se situe dans le cadre de l'hypothèse des
petites perturbations.
De fait, le vecteur déplacement est d'ordre inférieur ou égal à un, soit d ≤ 01 .
De façon générale l'ordre r noté 0r est défini selon 0 0 01 0r r= =ζ ζ où ζ est un réel
strictement positif très petit devant l'unité.
Si on limite l'écriture d'une quantité à son développement à l'ordre r on utilisera le signe ≈r
(pour simplifier les expressions on emploiera de préférence ≈ au lieu de ≈1
).
En guise de conclusion, nous pouvons dire que le critère de stabilité se résume de la
façon suivante :
( )∀ ∈ − ≤d dR N0 0
1avec , la stabilité est assurée si ( )Wd d > 0

Stabilité des Membranes Textiles Architecturales 29
I-4-2 Recherche des mécanismes
Si l'on considère un déplacement généralisé d des noeuds de la structure, on peut
écrire le tenseur linéarisé des déformations de Green-Lagrange associé à chaque élément selon
(D-6) sous la forme :
[ ] [ ] [ ] ε εε εL loce e
Le e
Le e
T T b d= = (I-48)
D'après (C-20) nous avons [ ] [ ]T Te e T
ε σ= ' et ainsi, en utilisant la définition de la matrice
élémentaire d'équilibre [ ]ae en (I-10) :
[ ] [ ] [ ] v v T b d v a de L loce
e L loce e T
Le e
ee T eε ε σ= =' (I-49)
soit après assemblage des relations élémentaires (I-49) avec ε εL loce v
e L loce
v= :
[ ] εL locv T
d= A (I-50)
Le noyau de AT , soit Ker AT , définit ainsi le sous-espace vectoriel des mécanismes; c'est à
dire l'ensemble des vecteurs pour lesquels ε εL loce v
L loce= = 0 .
Il est possible de démontrer que Ker AT et Im A forment deux sous-espaces vectoriels
supplémentaires et orthogonaux dans l'espace R N , soit R A AN = ⊕Ker ImT .
De façon générale tout vecteur déplacement peut alors se décomposer de façon unique en
[VAS 98] :
d d dI K= + où dKT∈Ker A et dI ∈Im A (I-51)
I-4-3 Détermination des énergies de déformations élémentaires sur l'espace des
mécanismes
On considère la situation où la structure possède au moins un mécanisme, c'est à dire
d dK= d'ordre r ≥1 en occultant les déplacements orthogonaux dI .
Il s'agit de proposer une écriture matricielle de l'énergie de déformation élémentaire
( )w dde
Ke
K pour chaque élément lorsque ses noeuds se déplacent selon un mécanisme dK
e.
I-4-3-1 Cas d'un élément de câble
Le vecteur élémentaire des déplacements nodaux des noeuds 1 et 2 extrémités du câble
considéré s'écrit :
d d d d d d d d dKc T
K K K K K K K KX Y Z X Y Z= =
r r
1 2 1 1 1 2 2 2 (I-52)

30 Partie I
rxc1
rX
rY
rZ
2
1'
2'
lc
lc'
rdK2
rdK1
Fig. I-20 Déformation d'un élément de
câble sur KerT
A
En notant r r rd d dK K K21 2 1= − , la longueur après
déformation se détermine par (figure I-20) :
l lc c K Kd d'
' '2 2
221
2211 2 2 12= = + + ⋅
→ →r r (I-53)
Comme r rdK c21 0⋅ =x sur Ker TA , il suit :
l ll
ll
c cK
c
r
eK
c
d d' .= + ≈ +( )12
212
20 5
221
2r r
(I-54)
La variation de longueur de l'élément étant ∆c c c
rK
c
d= − ≈l l
l
'2
212
2
r
, la déformation du câble
exprimée dans son repère local s'écrit selon la forme quadratique :
εNLK
rK
c
dx ≈
221
2
22
r
l (I-55)
On peut ainsi définir l'énergie élémentaire de déformation par :
( )w d v v vdc
Kc
r
cc
NLK
cc
NLK
r
cc
NLK
K≈ + ≈−4 1
0
2
0
1
2σ ε σ ε σ εx x x x (I-56)
Si l'on choisit une écriture matricielle il vient :
[ ] w d ddc
r
Kc c
Kc
K≈2 1
2d (I-57)
avec ts
c
c
c0
0=σ
et [ ] [ ][ ]
d c c
c
t Id sym
sym Id=
0 3
3l (I-58)
La matrice symétrique [ ]d c prend le nom de matrice de caractérisation énergétique
(sous-entendu des mécanismes).
I-4-3-2 Cas d'un élément de membrane
Le vecteur des déplacements nodaux d'un élément s'exprime par :
d d d d d d d d d d d d dKm T
K K K K K K K K K K K KX Y Z X Y Z X Y Z= =
r r r
1 2 3 1 1 1 2 2 2 3 3 3 (I-59)
rX
rY
rZ
2
1
rx m
rym
rzm
θ2
θ3
ψ
lb1
lb2lb3
3
Fig. I-21 Elément de membrane
Les variations de longueurs des trois côtés de
l'élément se déterminent par (figure I-21) :
∆m
rKd
1
223
2
2≈
r
lb1
; ∆m
rKd
2
213
2
2≈
r
lb2
et ∆m
rKd
3
212
2
2≈
r
lb3
(I-60)
Les déformations relatives de ces mêmes i côtés ont alors
pour valeurs εmi
rmi≈
2 ∆
lbi
.

Stabilité des Membranes Textiles Architecturales 31
Dans le repère local lié à l'élément on peut écrire les composantes du tenseur des déformations
selon l'expression :
ε
ε
ε
ε
ε
ε
εNLlocK m
NLK
NLK
NLK
rm
m
m
b c c b
b c c b
a c a c c c
a b a b b b
=
≈−
−
− −
− −
x
y
xy
2
2 3 2 3
2 3 2 3
3 2 2 3 3 2
2 3 3 2 3 2
1
2
3
10 0
(I-61)
où θi représente l'angle orienté direct situé entre le côté i et l'axe rx m et :
ai i= cos2θ ; bi i= sin2θ ; ci i i= cos sinθ θ (I-62)
De plus avec l'angle ψ θ θ= −2 3 , on montre que :
b c c b2 3 2 3 2 3 0− = >sin sin sinθ θ ψ (I-63)
Nous arrivons ainsi à la forme réduite :
[ ]ε
εθ θ θ θ
NLK
NLK
r
m m
K
K
K
mK
K
Ks s
d
d
d
m
d
d
d
x
y
≈
−
=
21
2
12
2 3 3 2
232
132
122
232
132
122
1
2
10 0
1 1
2
1
2
1
2
l
l
b
b tg tg tg tg
r
r
r
r
r
r (I-64)
en choisissant la matrice [ ]mm
m m m
mm
m m m=
11
21 2 3
0 0.
L'énergie de déformation élémentaire sur l'espace de ses mécanismes Ker TA d'un
élément de membrane en état de prétension est définie par :
( ) w d v v vdm
Km
r
m locm
NLlocK m
m locm
NLlocK m
r
m locm
NLlocK m
K≈ + ≈−4 1
0
2
0
1
2σ ε σ ε σ ε (I-65)
Si la configuration d'équilibre est déterminée selon la Méthode des Densités de Contraintes
Surfaciques, nous avons σ σ σ0 0 0locm
isom m= = par extension d'écriture. Il vient alors :
w v v m d m d m ddm
r
mm
NLK
NLK
mm m
Km
Km
KK≈ + = + +2
0 0 1 232
2 132
3 1221
2σ ε ε σ( ) ( )x y
r r r (I-66)
avec le terme m m ms
m m m
m1 11 21
1
2= + =
tgψ.
De plus les relations précédentes permettent de vérifier que :
m ms
m m
m1 2
3 2
20+ = >( )bl ; m m
s
m m
m1 3
2 2
20+ = >( )bl et m m
s
m m
m2 3
1 2
20+ = >( )bl (I-67)
Ainsi, il est possible d'écrire l'énergie élémentaire de déformation de façon analogue à
l'équation (I-57) :
[ ] w d ddm
r
Km m
Km
K≈2 1
2d (I-68)

32 Partie I
avec [ ]( ) [ ]
[ ] ( ) [ ][ ] [ ] ( ) [ ]
d m mm
m m
m m m
m m m m
vm m Id sym sym
m Id m m Id sym
m Id m Id m m Id
=
+
− +
− − +
σ0
1 3 3
1 3 1 2 3
3 3 2 3 2 3 3
2 (I-69)
qui représente la matrice élémentaire de caractérisation énergétique.
I-4-4 Etude de la stabilité sur les différents espaces
Cette étude se situe à présent dans le cas général d'une représentation discrète ou
continue de la structure.
La démarche retenue vise à définir les critères de stabilité sur le sous-espace vectoriel
orthogonal aux mécanismes Im A puis sur le sous-espace vectoriel des mécanismes Ker AT .
Par la suite, on considérera l'éventualité d'un déplacement appartenant simultanément à ces
deux sous-espaces vectoriels.
I-4-4-1 Stabilité lorsque les mécanismes ne sont pas excités (sur Im A )
Selon la décomposition d d dI K= + , on considère le cas où dK = 0 , c'est à
dire d dI= d'ordre r ≥ 1.
En négligeant les termes εNLlocI e
d'ordre 2r , l'énergie de déformation élémentaire est :
w v vde
r
e loce
LlocI e
e loce
LlocI e
I≈ +σ ε σ ε0
1
2 (I-70)
Si [ ]Eloce représente la matrice élémentaire des constantes élastiques du matériau, il suit
[ ] εLlocI e
Le
Ie
b d= et ainsi [ ] [ ] [ ] σ εloce
r
loce
LlocI e
r
loce
Le
Ie
E E b d≈ ≈− −1 1
(I-71)
Nous avons alors les développements :
[ ] [ ] [ ] [ ] w v b d v d b E b dde
r
e loce
Le
Ie
e Ie
Le T
loce
Le
Ie
I≈ +−2 1
0
1
2σ (I-72)
En introduisant la matrice élémentaire de rigidité linéaire [ ]kLe
établie dans l'annexe B (voir
équation B-37), on obtient :
[ ] [ ] w v a d d k dde
r
e loce e T
Ie
Ie
Le
Ie
I≈ +−2 1
0
1
2σ (I-73)
Après assemblage des relations (I-73) il vient :
[ ] [ ] Wd d d K dI
r
locT
I I L I≈ +−2 1
0
1
2σ A (I-74)

Stabilité des Membranes Textiles Architecturales 33
L'équilibre de la structure en position de référence se traduisant selon (I-12) par
[ ] A σ0 0loc = , il reste donc :
[ ] Wd d K dI
r
I L I≈−2 1 1
2 (I-75)
La matrice de rigidité linéaire généralisée [ ]KL étant définie positive après introduction
des conditions d'appui de la structure, la forme ( )Wd dI I l'est alors également.
Ceci nous permet de conclure :
Un système tendu est toujours stable lorsque ses mécanismes ne sont pas excités.
I-4-4-2 Stabilité lorsque seulement les mécanismes sont excités (sur Ker AT )
Dans le cas présent d dK= d'ordre r ≥ 1 .
L'énergie de déformation élémentaire est définie par :
w v vde
e loce
NLlocK e
e loce
NLlocK e
K= +σ ε σ ε0
1
2 (I-76)
Comme [ ] σ εloce
loce
NLlocK e
E= et que l'écriture des composantes de εNLlocK e
se réfère à des
termes quadratiques rdK
2 d'ordre 2r, alors le produit σ εloce
NLlocK e
est d'ordre 4 1r − .
En se limitant à sa partie principale, on obtient donc :
[ ] w v d dde
r
e loce
NLlocK e
Ke e
Ke
K≈ =2
0
1
2σ ε d (I-77)
Soit après assemblage des relations (I-77) :
[ ] Wd d D dK
r
K K≈2 1
2 (I-78)
Dans cette équation, [ ]D représente la matrice généralisée de caractérisation énergétique; si
elle est définie positive alors ( )Wd dK K l'est également.
Le critère de stabilité peut ici se formuler selon :
Un système tendu est stable lorsque seulement ses mécanismes sont excités si et seulement si
sa matrice généralisée de caractérisation énergétique [ ]D est définie positive.
Nous démontrons en annexe F que cette propriété est toujours vérifiée.
De plus, il est montré que [ ] d D dK K ≠ 0 pour un déplacement dK ≠ 0 .
Cela signifie qu'il n'est pas nécessaire de considérer les termes de dK d'ordre supérieur à un,
c'est à dire que la structure admet seulement des mécanismes d'ordre un.
Cette remarque est bien entendue valable dans le cadre d'une caractérisation de type
énergétique des mécanismes [SAL 92].

34 Partie I
I-4-4-3 Stabilité au voisinage des déplacements orthogonaux
Après avoir défini les critères de stabilité sur les deux sous-espaces vectoriels
Ker AT et Im A , étudions à présent leurs voisinages. Il est en effet exceptionnel qu'un
déplacement se situe uniquement sur l'un de ces sous-espaces.
On considère que d d dI K= + avec dI d'ordre un et dK d'ordre r ≥ 1.
Comme ε ε ε εloce
r
LlocI e
NLlocI e
NLlocK e≈ + +
2
, l'énergie de déformation élémentaire s'écrit :
w v v v
v v v
de
r
e loce
LlocI e
e loce
NLlocI e
e loce
NLlocK e
r
eloce
LlocI e e
loce
NLlocI e e
loce
NLlocK e
r
≈ + +
+ + +
2
0
1
0
2
0
2
1 2 2
2 2 2
σ ε σ ε σ ε
σ ε σ ε σ ε
ordre ordre ordre
ordre ordre ordre
1 244 344 1 244 344 1 244 344
1 244 344 1 244 344 1 244 344
(I-79)
En ne retenant que les termes principaux lors de l'assemblage et d'après (I-12), il vient :
[ ] Wd d K dI L I≈1
2 (I-80)
On remarque que ( )Wd d est toujours définie positive car la matrice [ ]KL l'est
également. Cela ne signifie pas pour autant que le système soit stable dans le voisinage de
Im A . En effet, lorsqu'on amène puis relâche la structure dans ce voisinage, celle-ci peut
"passer" dans le voisinage d'un mécanisme et sa stabilité dépend alors de ce nouveau
voisinage. Pour cela, étudions à présent ce qu'il peut advenir au voisinage de Ker AT .
I-4-4-4 Stabilité au voisinage des mécanismes
Dans ce cas d d dI K= + avec dI d'ordre r ≥ 1 et dK d'ordre un.
Selon un raisonnement similaire on a:
w v v v
v v v
de
r
e loce
LlocI e
r
e loce
NLlocI e
r
e loce
NLlocK e
eloce
LlocI e
r
eloce
NLlocI e
r
eloce
NLlocK e
r
≈ + +
+ + +
−
− − +
3 1
0 0
2
0
2
2 1 3 1 1
2 2 2
σ ε σ ε σ ε
σ ε σ ε σ ε
ordre ordre ordre
ordre ordre ordre
1 244 344 1 244 344 1 244 344
1 244 344 1 244 344 1 244 344
(I-81)
Soit, en ne retenant que les termes principaux :
[ ] [ ] Wd d K d d D dr
I L I
r
K K≈ +−
−
2 1
2 1 2
1
2
1
2ordre ordre
1 244 344 1 244 344 (I-82)

Stabilité des Membranes Textiles Architecturales 35
Il est possible d'observer que, quelque soit l'ordre r de dI alors ( )Wd d est toujours
définie positive car la matrice [ ]D l'est également (se reporter à l'annexe F).
Cette étude nous permet ainsi d'aboutir à la conclusion suivante :
Les membranes tendues faisant l'objet d'une Recherche de Forme selon une représentation
linéaire (Méthode des Densités de Forces) ou par la Méthode des Densités de Contraintes
Surfaciques (schématisation continue) sont toujours dans une position d'équilibre stable.
Ce résultat n'est certes pas des plus surprenants, le contraire l'eut été tout autrement, car
il paraît intuitif qu'un système mécanique en état de prétension et sans aucune zone en
compression soit stable.
L'étude réalisée se justifie toutefois pleinement, ne serait-ce que par la discussion menée sur
l'énergie de déformation de la structure selon les différents sous-espaces considérés ou bien la
mise en évidence de l'ordre de ses mécanismes.

Conclusion de la Partie I 37
Conclusion
Dédiée à l'étude des relations existant entre les paramètres de Formes et de Forces, cette
première partie a été consacrée aux procédés de Recherche de Forme des Membranes Textiles
Architecturales.
L'introduction des matrices d'équilibre du système a permis d'effectuer en premier lieu
une recherche des états d'autocontrainte de la structure selon une forme donnée.
C'est dans le cadre d'une telle approche qu'il a été possible de mettre en évidence, dans
certains cas, l'absence de correspondance entre la géométrie d'un réseau de câbles tendus
(représentation linéaire) et celle d'une membrane en état de prétension (représentation
surfacique).
Concluant alors à la nécessité de mettre en place un nouveau procédé de Recherche de Forme
fondé sur une approche continue du domaine, cet aspect a été abordé selon une volonté
première de répondre aux exigences fondamentales des concepteurs.
La solution est apportée par la Méthode des Densités de Contraintes Surfaciques. Ce
procédé se réfère à l'utilisation de tenseurs de précontrainte isotropes sur toute la surface et
aboutit à une écriture relativement simple des équations d'équilibre, autorisant par là même
son intégration au coeur d'un logiciel CAO de Recherche de Forme tout en conjuguant des
qualités de rapidité, d'interactivité ainsi que de respect des diverses considérations
mécaniques.
Le concepteur peut de plus envisager des distributions de précontraintes isotropes différentes,
ce qui laisse la porte ouverte à une gamme très large de formes.
La formulation employée permet de plus une approche combinée avec la Méthode des
Densités de Forces (gestion des courbures de câbles de ralingue par exemple) et offre la
possibilité de déterminer des structures de type gonflable.
De nombreuses applications sont présentées afin de souligner le propos.
L'attention s'est par la suite portée sur l'étude de la stabilité des formes ainsi définies.
La démarche retenue a d'abord consisté à décomposer l'espace en une somme directe
d'un sous-espace lié aux mécanismes de la structure et d'un autre sous-espace orthogonal à
celui-ci. L'application du théorème de Lejeune-Dirichlet selon des déplacements appartenant à
ces sous-espaces ainsi qu'à leurs voisinages respectifs a alors permis de formuler les critères
de stabilité nécessaires.
L'introduction et l'étude de matrices dites de caractérisation énergétique dans le cadre
d'une représentation linéaire puis surfacique montrent que les structures considérées
n'admettent que des mécanismes du premier ordre et, remarque pour le moins importante, que
leur stabilité est toujours assurée.

Partie II
Recherche de Forme de Configurations
Minimales

Introduction 39
Introduction Si la première partie a pour objet les divers procédés de Recherche de Forme des structures tendues, nous nous proposons à présent d'envisager une étude des relations Formes-Forces selon une déclinaison particulière. En fait, ces termes devraient ici s'accorder au singulier car le thème abordé concerne les Formes Minimales où, nous le verrons par la suite, il y a unicité de Forces pour une Forme alors elle aussi unique. La dénomination de configuration minimale regroupe en fait les notions de Réseau de
Longueur Minimale et de Surface d'Aire Minimale. Ces structures ont ceci de singulier que, passant inaperçues aux yeux du non-averti, elles se dévoilent alors à l'initié qui se ravira d'une telle diversité et profusion d'exemples naturels. Au delà de considérations purement géométriques, on peut les caractériser par d'intrinsèques propriétés mécaniques qui leurs confèrent un intérêt immédiat pour tout concepteur de Membrane Textile Architecturale. A cet effet, cette deuxième partie met en exergue plusieurs procédés de Recherche de Forme destinés à l'étude des configurations minimales. Une première approche est fondée sur les outils déjà mis en place, à savoir les différentes Méthodes de Densités (de Forces ou bien de Contraintes Surfaciques). Toujours désireux d'élargir la palette des instruments de l'ingénieur concepteur, un autre procédé est par la suite présenté. Sa formulation repose sur la minimisation de fonctionnelles par la Méthode du Gradient Conjugué. Une démarche associant ces deux approches est ensuite suggérée, elle permet de mettre en avant la stratégie la plus efficace à retenir. Cette partie est également l'occasion de porter une attention toute particulière sur la détermination des caractéristiques géométriques des surfaces, à savoir les valeurs des courbures principales en un point donné. Pour cela, nous développons une méthode autorisant de tels calculs par dérivation des fonctions de forme.

Nature et Formes Minimales 41
II-1 La Nature et les Formes Minimales Si l'on trouve trace de problèmes isopérimétriques dans la plus haute antiquité, à l'image du poète Virgile dans l'Enéide [HIL 85], l'étude mathématique au sens plus large des configurations minimales ne fut ouvert que suite à l'apparition du calcul différentiel et variationnel au XVIIIe siècle sous l'impulsion d'Euler et de quelques uns de ses contemporains. La géométrie a dès lors incorporé ces notions pour donner naissance à la géométrie différentielle qui s'intéresse à une configuration spatiale pour sa forme et non plus seulement par des conditions imposées aux coordonnées de ses points.
Fig II-1 Squelette de radiolaire
L'observation de formes naturelles a également permis d'obtenir des résultats significatifs. La vision microscopique de créatures unicellulaires appelées radiolaires et s'appuyant sur des supports polyédriques par d'Arcy Thompson, à l'occasion de ses travaux exposés dans le brillant ouvrage 'On Growth and Form', souligne l'existence on ne peut plus répétitive de configurations hexagonales (figure II-1) [DAR 17]. Cette observation est renouvelée lorsque l'on emprisonne un réseau de films de savon entre deux lames de verre parallèles et proches ou bien par agrandissement d'une aile d'insecte (figures II-2 et 3).
Fig II-2 Bulles de savon
Fig II-3 Aile d'insecte
Les exemples peuvent en fait se multiplier à l'infini, tant ils semblent reposer sur un principe d'économie des moyens, suggérant que la nature procède toujours de la façon la plus simple et la plus efficace [COI 87] et [GOR 78].
Ces formes naturelles, caractérisées par des angles de 120o entre les diverses branches, trouvent en effet leur fondement lorsqu'il s'agit d'aborder selon un contexte plus général les problèmes de plus courts chemins, autrement dit de longueurs minimales. Nous passerons sous silence toute la littérature mathématique consacrée à ce thème pour prêter attention à ses répercussions dans le domaine des structures à base de réseaux de câbles tendus. Il a en effet été montré qu'un réseau est de longueur minimale si tous ses éléments possèdent une tension identique. Cette propriété mécanique s'avère des plus attractives lorsque

42 Partie II
le concepteur envisage le dimensionnement des câbles ou désire déterminer des courbes géodésiques sur le maillage. On notera seulement à cet égard qu'il existe également des applications dans d'autres secteurs d'activités, de l'étude de l'implantation de composants sur une carte électronique à la détermination de réseaux aériens reliants plusieurs villes. Autre objet de surprise et de fascination, les surfaces d'aire minimale ont suscité de nombreux développements. Une définition simplifiée peut en être donnée : l'aire d'une surface minimale est plus petite que celle de toute autre surface voisine s'appuyant sur le même contour. Lagrange établit en 1760 leur équation caractéristique pendant que Meusnier (1770) montra qu'elles se distinguent par une courbure moyenne constante en tout point [LAW 92]. Par la suite, on vérifia qu'une membrane tendue est d'aire minimale si sa tension est identique en tout point et selon toutes directions. Il est possible de visualiser rapidement de telles formes en utilisant des films de savon (figure II-4). Cette représentation physique met en lumière une autre spécificité des surfaces minimales en révélant qu'il existe en fait certaines géométries de courbure moyenne constante ne pouvant être matérialisées [ISE 78]. Dans ce cas particulier, il est en effet impossible de créer un film de savon correspondant à la forme envisagée.
Fig II-4 Surface minimale
Nous devons ainsi introduire le concept de stabilité de ces géométries d'équilibre et considérer que la condition de courbure moyenne constante est nécessaire mais pas forcément suffisante pour obtenir une forme stable, donc physiquement réalisable. Par opposition, la propriété mécanique de tension uniforme vérifie toujours ce critère et sera ainsi à nos yeux la condition fondamentale à respecter.
L'étude des formes minimales a été initialement conduite à l'aide de maquettes et autres modèles physiques [OTT 73] avant de céder le pas à des investigations numériques par ordinateurs. Au chapitre des procédés fondés sur la considération géométrique de courbure moyenne constante, nous citons les travaux liés à la résolution de l'équation de Lagrange (principalement par Méthodes de Différences Finies [MAR 93]) ou bien reposant sur la représentation mathématique de Weierstrass par l'intermédiaire de fonctions dites holomorphes (études de D. Hoffman [HOF 93]). Ces approches n'offrent cependant pas toute satisfaction car elles ne garantissent pas la stabilité des configurations ainsi déterminées. Par suite, de nombreuses méthodes utilisant la propriété de tension uniforme ont été proposées. On retrouve les travaux de E. Haug portant sur la Méthode des Eléments Finis [HAU 87] ainsi que ceux envisagés selon la Méthode de Relaxation Dynamique (M. Barnes et W. Lewis [BAR 76] et [LEW 96]). L. Gründig a également suggéré un procédé de minimisation par utilisation de la Méthode des Moindres Carrés [GRÜ 88] et K.U. Bletzinger un formalisme dit de "continuité numérique" qui permet d'obtenir certaines formes minimales [BLE 95]. Les travaux de P. Singer sont également consacrés à cette thématique et offrent de nombreuses applications [SIN 95]. Ces diverses méthodes se caractérisent cependant par la complexité des approches employées et la nécessité de recourir à des procédés de résolution "lourds", peu conviviaux et réclamant des temps de calcul élevés.

Formes Minimales et Méthodes de Densités 43
II-2 Recherche de Formes Minimales par les Méthodes de Densités
Puisque notre désir est ici d'appréhender la Recherche de Forme des configurations
minimales en ne retenant que des géométries d'équilibre stables, les diverses considérations
rencontrées au cours de la première partie de ce mémoire nous ont offert un précieux outil
allant dans cette direction et constitué par les différentes Méthodes de Densités.
II-2-1 Etude de réseaux de câbles de longueur minimale
Le chemin emprunté durant cette étude des formes minima va suivre plusieurs
directions. Nous allons en premier lieu nous orienter vers cette classe particulière de structures
que constituent les réseaux de câbles de longueur minimale. Plusieurs étapes sont envisagées,
d'abord fondées sur la considération d'égalité des coefficients de densités de forces du système
puis sur celle d'une distribution uniforme des tensions au sein de réseau. L'écriture simplifiée
liée au mode de schématisation discret va nous permettre de mettre en lumière quelques
principes directeurs ainsi que les démarches à envisager.
II-2-1-1 Réseau avec coefficients de densités de forces identiques
Si l'on considère la somme des longueurs des éléments élevées au carré, il vient :
L = lck
C C
X Y Zk k k k k k
2
11 22
1 22
1 22
1k= k=
∑ ∑= + +( ) (II-1)
L est minimale si il est vérifié en tout noeud du maillage que :
∂
∂
∂
∂
∂
∂
L L L
X Y Zi i i
= = = 0 (II-2)
Sur l'axe rX global on peut de plus écrire :
∂
∂
L
XX
ii
c
j
i
= ∑2 21j=
(II-3)
En supposant que le réseau fait l'objet d'une Recherche de Forme par la Méthode des Densités
de Forces avec des coefficients de densités identiques ( q qkl l= ), il suit, au regard de la
relation d'équilibre nodal (I-4) :
c X Xi i
c
j
i
= ∑ 21j=
et ainsi 1
202
1
∂
∂
L
Xc X X
ii i
c
j
i
= − =∑j=
(II-4)
Une démarche équivalente selon les directions rY et
rZ mène aussi à
∂
∂
∂
∂
L L
Y Zi i
= = 0 .
Nous vérifions alors la propriété suivante :
Un réseau de câbles calculé avec des coefficients de densités de forces identiques minimise la
somme des longueurs des éléments au carré.
Cette remarque avait par ailleurs déjà été formulée par Sheck dans le cadre de ses travaux de
thèse [SHE 76] et à l'issue de la présentation de la Méthode des Densités de Forces [SHE 74].
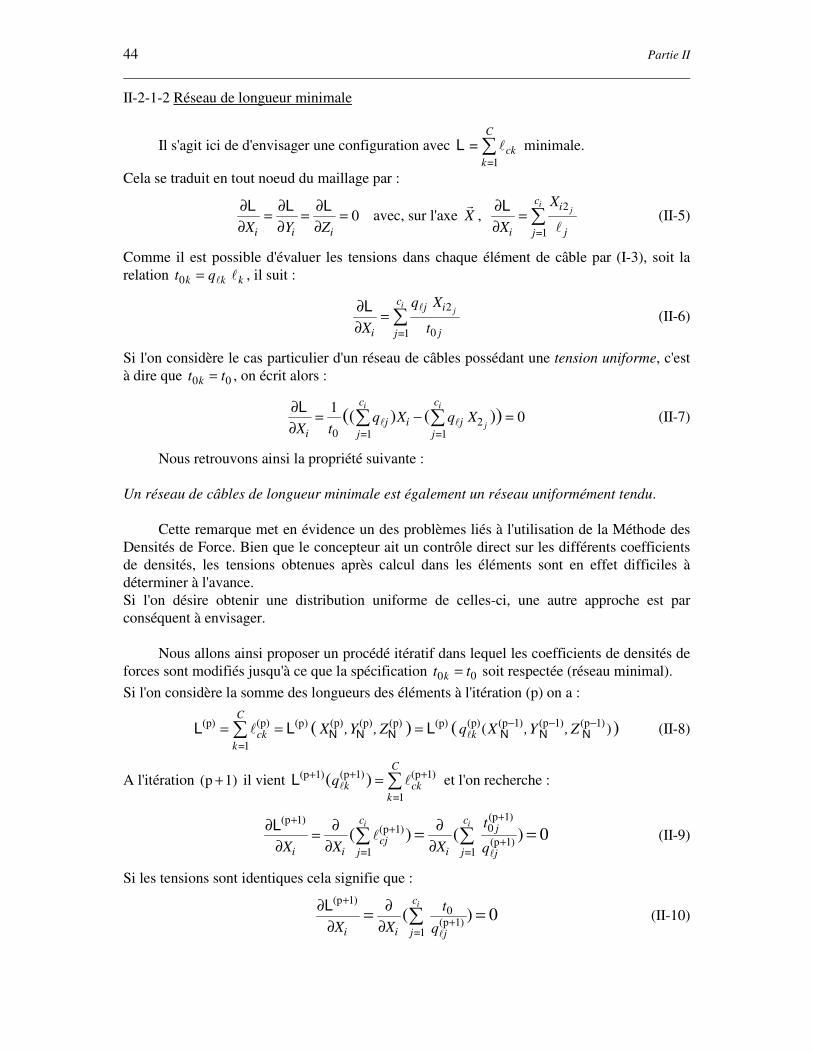
44 Partie II
II-2-1-2 Réseau de longueur minimale
Il s'agit ici de d'envisager une configuration avec L = lck
C
k=1
∑ minimale.
Cela se traduit en tout noeud du maillage par :
∂
∂
∂
∂
∂
∂
L L L
X Y Zi i i
= = = 0 avec, sur l'axe rX ,
∂
∂
L
X
X
i
i
j
cj
i
= ∑2
1 lj=
(II-5)
Comme il est possible d'évaluer les tensions dans chaque élément de câble par (I-3), soit la
relation t qk k k0 = l l , il suit :
∂
∂
L
X
q X
ti
j i
j
cj
i
= ∑l 2
01j=
(II-6)
Si l'on considère le cas particulier d'un réseau de câbles possédant une tension uniforme, c'est
à dire que t tk0 0= , on écrit alors :
∂
∂
L
X tq X q X
ij
c
i j
ci
j
i
= − =∑ ∑1
00 1
21
( )( ) ( )l l
j= j=
(II-7)
Nous retrouvons ainsi la propriété suivante :
Un réseau de câbles de longueur minimale est également un réseau uniformément tendu.
Cette remarque met en évidence un des problèmes liés à l'utilisation de la Méthode des
Densités de Force. Bien que le concepteur ait un contrôle direct sur les différents coefficients
de densités, les tensions obtenues après calcul dans les éléments sont en effet difficiles à
déterminer à l'avance.
Si l'on désire obtenir une distribution uniforme de celles-ci, une autre approche est par
conséquent à envisager.
Nous allons ainsi proposer un procédé itératif dans lequel les coefficients de densités de
forces sont modifiés jusqu'à ce que la spécification t tk0 0= soit respectée (réseau minimal).
Si l'on considère la somme des longueurs des éléments à l'itération (p) on a :
L L LN N N N N N
(p) (p) (p) (p) (p) (p) (p) (p) (p ) (p ) (p )( ) ( )( )= = =∑ − − −l
lck
C
kX Y Z q X Y Zk=1
1 1 1, , , , (II-8)
A l'itération (p 1)+ il vient L(p ) (p ) (p )( )+ + += ∑1 1 1
1
q k ck
C
ll
k=
et l'on recherche :
∂
∂
∂
∂
∂
∂
L(p )
(p )(p )
(p )( ) ( )
++
+
+= ∑ ∑= =
11
1
01
11
0X X X
t
qi icj
c
i
j
j
ci i
l
lj= j=
(II-9)
Si les tensions sont identiques cela signifie que :
∂
∂
∂
∂
L(p )
(p )( )
+
+= =∑
10
11
0X X
t
qi i j
ci
lj=
(II-10)

Formes Minimales et Méthodes de Densités 45
En supposant que ∂
∂Xicj
ci
( )(p)l
j=1
0∑ = , nous écrivons alors :
t
q
t
qj
c
cj
cj
j
ci i i0
11 1
0
1l l
l(p )
(p)(p)
(p)+∑ ∑ ∑= =j= j= j=
(II-11)
Il en découle la relation fondamentale :
q qt
tk k
k
l l
(p ) (p)(p)
+ =1 0
0
(II-12)
Nous proposons de fait la démarche itérative DEminl qui suit :
DEl1 :
DEl
2 :
DEl3 :
Initialiser les coefficients de densités de forces q kl(p )=1
( q kl(p )= =1
1 est recommandé).
Calculer la configuration d'équilibre (p) et les tensions résultantes t qk k ck0(p) (p) (p)=
ll .
Si pour tous les éléments on vérifie t t k0 0− <(p) ζ , où ζ est une valeur de tolérance
choisie à l'avance, alors le processus se termine.
Sinon, modifier les coefficients q kl selon (II-12) et retourner à DEl2 avec p p= +1 .
Remarque : tC
t k
C
0 01
1
1= =∑ (p )
k=
peut être choisi afin de minimiser les temps de calcul.
II-2-1-3 Applications
-a- Le premier exemple illustre le problème dit de Steiner à trois points. Il s'agit de relier
trois noeuds donnés par un réseau de longueur totale minimale.
Nous allons pour cela considérer un maillage plan comportant trois éléments de câble reliés à
ces points ainsi qu'avec un noeud libre numéroté 1.
l1 l2
l3
rX
rY
2d
2d
1
4
3d
Fig. II-5a Réseau avec L minimal
120o
l1 l2
l3
1
d ( )21
3−
Fig. II-5b Réseau avec L minimal

46 Partie II
Si l'on effectue une recherche de la position d'équilibre avec des coefficients de densités de
forces identiques ( q q ql l l1 2 3= = , voir figure II-5a), on obtient :
l l3 1
4
3
4
13= =d et t t t01 02 03
13
4= = .
De plus L =+
≈( )4 2 13
33 737d d. et Lmin = ≈
14
34 6662 2d d. .
L'application du processus itératif nous conduit à des tensions égales ( t t t01 02 03= = ) où
l l3 121
3
2 3 1
2= − =
−( ) ( )d avec q q ql l l1 2 3
2 3 1
2= =
−( ) ainsi que :
Lmin = + ≈( )2 3 3 732d d. et L =−
≈( )21 4 3
34 6902 2
d d. .
Ce réseau de longueur minimale se caractérise par un angle de 120o entre les différents
éléments de câble. Nous retrouvons à cette occasion une configuration bien connue et
présentée au cours du chapitre introductif.
-b- L'exemple suivant souligne l'existence de ce type de structure hexagonale avec le calcul
d'un système dit en "nid d'abeilles".
Fig. II-6a Maillage initial
Fig. II-6b Forme minimale
Fig. II-6c Structure en nid d'abeilles
Les figures II-6a et b représentent le maillage de départ et la forme de longueur minimale
obtenue après calcul. On peut effectuer un rapprochement avec l'image d'une structure en nid
d'abeilles observée dans la nature (figure II-6c).
Il est d'ailleurs peut être temps d'ouvrir une parenthèse pour mettre en avant un débat d'un tout
autre ordre. Ce type de structure fut en effet à la base de nombreuses digressions, certains
voyant là une preuve formelle de l'influence d'un Etre Suprême sur ces insectes à l'intelligence
toutefois limitée (par comparaison avec notre ordinateur qui a mis quelques minutes pour
effectuer ce calcul) et expliquant que la nature "sait" alors minimiser ses contingences
(comment réaliser un maximum de nids avec un minimum de cire); d'autres estiment plus sage
d'en référer à d'autres explications.
Sans préjuger d'une quelconque réponse, nous invitons le lecteur à prendre connaissance du
texte situé en annexe I. Il s'agit d'un extrait du remarquable ouvrage de d'Arcy Thompson 'On
Growth and Form' où il reprend la pensée du naturaliste Buffon [DAR 17].

Formes Minimales et Méthodes de Densités 47
-c- Une dernière application est à présent suggérée. Le propos est d'effectuer une Recherche
de Forme d'un réseau spatial à double courbure inverse en forme de "selle de cheval".
Une première géométrie est obtenue avec considérant des coefficients de densités de forces
identiques (figure II-7a). Nous notons au passage que les éléments de câble appartiennent à
des plans verticaux perpendiculaires entre eux et réalisent ce que F. Otto a appelé un réseau
orthogonal. Un autre calcul selon le procédé itératif suggéré détermine un réseau de tension
uniforme (et ainsi minimal) qui n'est plus de type orthogonal (figure II-7b).
Fig. II-7a Selle avec réseau orthogonal
Fig. II-7b Selle de tension uniforme
De façon plus générale, nous pouvons mettre en exergue la propriété suivante :
Comme un réseau de câbles réglé possède une tension uniforme, il est alors de longueur
minimale (attention, ceci ne signifie pas pour autant qu'un maillage de longueur minimale est
aussi réglé!). Cette remarque dissipe un lieu commun éminemment répandu qui consiste à
considérer une forme réglée comme étant aussi de surface minimale. Il est d'ailleurs possible
de s'interroger sur la persistance d'une telle pensée, et ce d'autant plus que Meusnier et Catalan
avait déjà démontré en 1842 que les seules surfaces minima réglées sont les hélicoïdes droits à
plan directeur [VAL 48].
II-2-2 Etude des surfaces d'aire minimale
La démarche s'inspire de celle suggérée à l'occasion de l'étude des réseaux de longueur
minimale. Nous allons ainsi envisager deux contextes particuliers et liés soit à l'hypothèse
d'égalité des coefficients de densités de contraintes du système, soit à celle d'uniformité des
contraintes au sein du milieu.
II-2-2-1 Surface avec coefficients de densités de contraintes identiques
Si l'on considère la somme des aires des éléments élevées au carré on a (II-13) :
S= smk
M M
Y Z Z Y Z X X Z X Y Y Xk k k k k k k k k k k k k k k k k k k k k k k k
2
11 2 3 2 1 2 3 2
21 2 3 2 1 2 3 2
21 2 3 2 1 2 3 2
2
1k= k=
∑ ∑= − + − + −( ) ( ) ( ) )
Cette valeur est minimale si tout noeud du maillage vérifie :
∂
∂
∂
∂
∂
∂
S S S
X Y Zi i i
= = = 0 (II-14)
Sur la direction rX l'équation
∂
∂
S
Xi
= 0 se traduit par :

48 Partie II
( ) ( ) ( )
( )
( )
( ) ( )
bl j
m
i
m
i
m
i
m
X X X Y Y X Z Z
Y X Y X Y Z X Z X Z
j j
i
j j j j
i
j j j j
i
j j j j j j j j j j j j
i
23 22
13 2 3 2
13 2 3 2
1
2 3 3 2 2 3 2 3 3 2 2 31
− − −
= − + −
∑ ∑ ∑
∑
j= j= j=
j=
(II-15)
Si l'on écrit les relations pour ∂
∂
∂
∂
S S
Y Zi i
= = 0 , il vient une écriture matricielle :
[ ] M Ni i iX = (II-16)
avec [ ] [ ]M
X sym sym
X Y Y sym
X Z Y Z Z
mi
mj
j
j
ij
mij j
j j j j j j
j j j j j j j j j j
i
=
−
− −
− − −
=∑ ∑j= j=1
23 22
3 2 3 22
3 22
3 2 3 2 3 2 3 22
3 22 1
l
l
l
b
b
b
(II-17)
ainsi que N
Y X Y X Y Z X Z X Z
X X Y X Y Z Y Z Y Z
X X Z X Z Y Y Z Y Z
ni
m
ij
mi j j j j j j j j j j j j
j j j j j j j j j j j j
j j j j j j j j j j j j
i
=
− + −
− + −
− + −
=∑ ∑
j= j=1
2 3 3 2 2 3 2 3 3 2 2 3
2 3 3 2 3 2 2 3 3 2 2 3
2 3 2 3 3 2 2 3 3 2 2 31
( ) ( )
( ) ( )
( ) ( )
(II-18)
Envisageons à présent une structure calculée par la Méthode des Densités de Contraintes
Surfaciques avec des coefficients de densités identiques ( q qsk s= ), les relations suivantes sont
alors respectées :
( )bl j
m
sj
i
Q2
1
1j=
∑ = où lb ( )j X Y Zj j j j j j
23 22
3 22
3 22= + + (II-19)
Nous pouvons dès lors formuler les équivalences :
[ ] [ ] [ ]Id A
X sym sym
X Y Y sym
X Z Y Z Z
Mi
j
m
mj
j
j j
m ii
ij j
j j j j j j
j j j j j j j j j j
i3
2
1
1
23 22
3 2 3 22
3 22
3 2 3 2 3 2 3 22
3 22 2
1
1 1− =
−
− −
− − −
=
∑∑
∑l
l
l
l lb
b
b
b bj=
j=
j=
(II-20)
B
Y X Y X Y Z X Z X Z
X X Y X Y Z Y Z Y Z
X X Z X Z Y Y Z Y Z
Ni
j
m
m
j
m ii
i j j j j j j j j j j j j
j j j j j j j j j j j j
j j j j j j j j j j j j
i=
− + −
− + −
− + −
=
∑∑
∑
1 1
2
1
1
2 3 3 2 2 3 2 3 3 2 2 3
2 3 3 2 3 2 2 3 3 2 2 3
2 3 2 3 3 2 2 3 3 2 2 32
1
l lb b
( ) ( )
( ) ( )
( ) ( )j=
j=
j=
(II-21)
L'équation (II-16) est ainsi vérifiée et par voie de conséquence (II-14) également. Il est
possible de mettre en avant la remarque suivante :
Une surface calculée avec des coefficients de densités de contraintes surfaciques identiques
minimise la somme des aires des éléments au carré.
Nous confirmons à ce propos la position de la Méthode des Densités de Contraintes
Surfaciques en tant que généralisation de la Méthode des Densités de Forces au cas
bidimensionnel.

Formes Minimales et Méthodes de Densités 49
II-2-2-2 Surface d'aire minimale
Il s'agit à présent d'envisager la fonction S= smk
M
k=1
∑ qui sera minimale si tout noeud
respecte les conditions :
∂
∂
∂
∂
∂
∂
S S S
X Y Zi i i
= = = 0 (II-22)
Ces relations peuvent aussi s'écrire sous la forme matricielle :
[ ] M Ni i i' '
X = (II-23)
avec [ ] [ ]Ms
mimj
ij
mi' = ∑( )
1
1j=
ainsi que Ns
nimj
ij
mi' = ∑( )
1
1j=
(II-24)
Comme on a σ0k
sk mkq s= , si la surface est uniformément tendue ( σ σ0 0k = ), il suit :
[ ] ( ) ( )( )q m q nsj ij
m
i sj ij
mi i
j= j=1 1
∑ ∑=X (II-25)
Cette égalité est de toute évidence respectée car :
[ ] [ ] [ ]( ) ( )( )( )bq m q Id Asj ij
m
sj j
m
i
i i
j= j=1
2
13∑ ∑= −l et ( ) ( )( )bq n q Bsj ij
m
sj j
m
i
i i
j= j=1
2
1
∑ ∑= l (II-26)
On retrouve ainsi la propriété d'uniformité des tensions propre aux surfaces d'aire minimale.
De façon analogue à la démarche utilisée s'agissant de l'étude des réseaux de câbles de
longueur minimale, nous allons mettre en place une stratégie itérative fondée sur l'utilisation
de la Méthode des Densités de Contraintes Surfaciques dans laquelle les coefficients sont
redéfinis à chaque étape selon la relation :
q qsk sk k
(p ) (p)(p)
+ =1 0
0
σ
σ (II-27)
Ces remarques conduisent au procédé DEmins dédié à l'investigation de surfaces minima :
DEs1 :
DEs2 :
DEs3 :
Initialiser les coefficients de densités de contraintes surfaciques qsk(p )= =1
1 .
Calculer la configuration d'équilibre (p) et les contraintes résultantes σ 0k
sk mkq s(p) (p) (p)= .
Si pour tous les éléments on vérifie σ σ ζ0 0− <k(p), alors le processus s'arrête.
Sinon, modifier les coefficients qsk(p )+1
selon (II-27) et retourner à DEs2 avec p p= +1 .
Si l'on désire réduire les temps de calcul, nous conseillons d'adopter la valeur moyenne
σ σ0 01
1
1= =
=∑
M
k
k
M(p )
.

50 Partie II
II-2-2-3 Applications
Fig. II-8 Tétraèdre
-a- Une première application se propose de vérifier
quelques propriétés géométriques des surfaces
minimales. Un cadre tétraédrique sert de support à la
formation d'un système comprenant six films
raccordés par quatre arêtes liquides (figure II-8). Les
coordonnées des points situés aux extrémités de ces
dernières sont fournies dans le tableau ci-dessous.
1 2 3 4 5
1 2 1 2 0 0 0
1 2 3 1 2 3 1 3 0 0
0 0 0 2 3 0
X
Y
Z
−
− −
/ /
/ / /
/
Le calcul de la forme minimale d'équilibre nous donne une position finale avec Z5 0 204= . .
A partir de là, on peut déterminer l'angle situé entre chaque couple d'arêtes qui est égal à
acos acos( ) ( )−
≈−0 204
0 612
1
3
.
., ce qui permet de vérifier une valeur caractéristique bien connue
des surfaces minima (angle de109 2816o ' '' ) [HIL 85].
De plus, on montre également que les surfaces se raccordent entre elles le long de leur arête
commune selon un angle de 120o .
-b- Le second exemple est dû au
mathématicien Gergonne (1816) qui formula le
problème suivant : quelle est la surface minimale
partageant un cube en deux volumes, sachant
qu'elle est fixée à deux diagonales orthogonales
et situées sur deux faces opposées du cube [ISE
78] ?
Schwarz démontra en 1872 qu'il existe en fait
une infinité de surfaces avec une courbure
moyenne nulle s'appuyant sur ce contour, mais
qu'une seule d'entre elles est stable. Il s'agit de la
forme représentée figure II-9 et calculée par la
méthode des densités de contraintes. La seule
difficulté a résidé dans le fait qu'il a fallu
considérer des conditions d'appui mixtes pour les
noeuds situés sur les deux faces verticales.
Fig. II-9 Surface de Gergonne
La forme obtenue nous permet aussi de vérifier qu'un film de savon se raccorde toujours à
angle droit sur une surface support lisse.

Formes Minimales et Méthodes de Densités 51
-c- L'application suivante traite un cas parmi
des plus classiques où une surface minima est
engendrée entre deux supports carrés parallèles
et proches (figures II-10).
Fig.II-10a Configuration de départ
Fig.II-10b Forme minimale
-d- L'intérêt se porte à présent sur un exemple riche en enseignements. Il s'agit de calculer
un film minimal entre deux cercles parallèles de rayon r dont l'éloignement hcat est variable.
Les expériences montrent en effet qu'à partir d'une certaine hauteur il n'est plus possible de
générer une forme minimale à double courbure inverse entre ces supports.
Cette valeur de hauteur maximale hmaxcat est bien connue. Pour cela, il suffit de considérer le
maximum de la fonction f(C) C ach C( )= 2 1 / , soit le point C∗ avec ∂
∂
f(C)
C)
C∗ = 0 , et on
peut en déduire h rmaxcat f(C )= ≈
∗ 1325. . Elle correspond en fait au maximum de la fonction
S S( )cath − où S représente l'aire de la surface susceptible de se former et S= 2 r
2π l'aire des
deux disques parallèles.
Un premier calcul réalisé avec h rcat
= 13. et r = 1 conduit à une forme minimale
d'équilibre prenant le nom de caténoïde (figure II-11a) avec S= .7 431. La valeur théorique
étant S( ) sh( )cat catcat
( )h hh
= +22
2πω
ω
ω avec r
h= ω
ωch( )
cat
, soit S= .7 439 , il s'ensuit
juste une erreur de 0.1%.
Par contre, si l'on prend h rcat
= 1 4. alors le processus ne peut converger vers une forme
stable et vérifie les remarques précédentes (figure II-11b).
Fig.II-11a Catenoïde
Fig.II-11b Calcul divergent
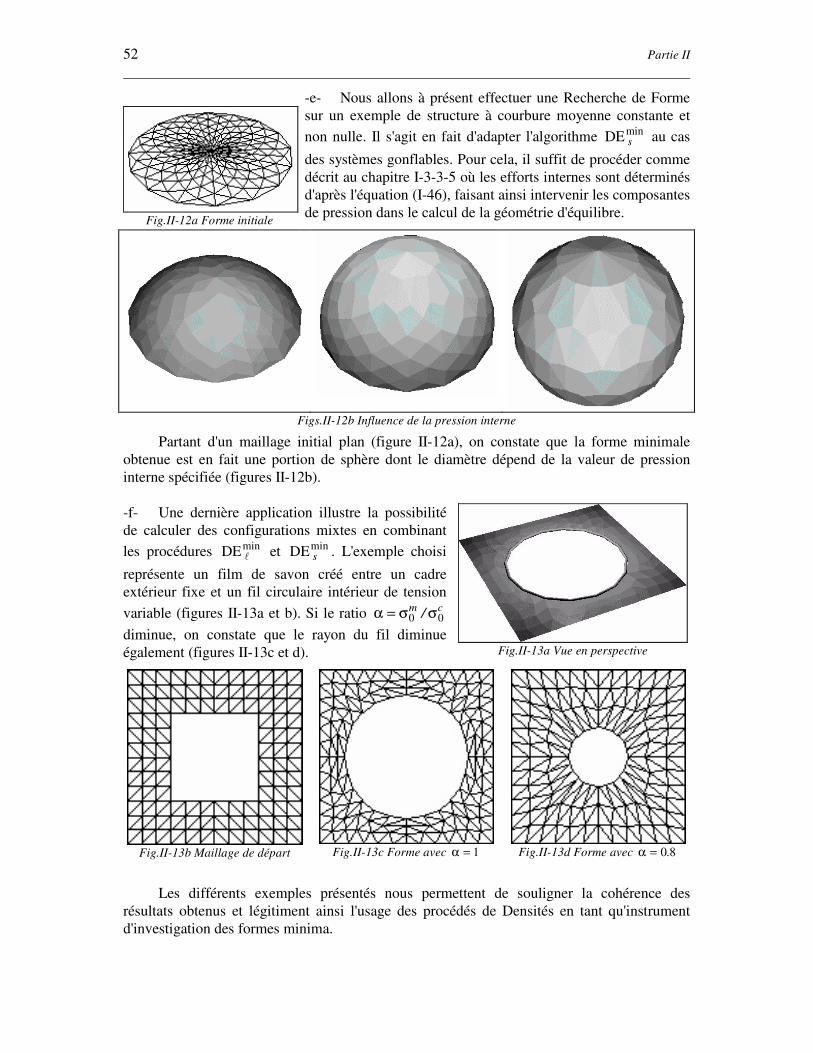
52 Partie II
Fig.II-12a Forme initiale
-e- Nous allons à présent effectuer une Recherche de Forme
sur un exemple de structure à courbure moyenne constante et
non nulle. Il s'agit en fait d'adapter l'algorithme DEmins au cas
des systèmes gonflables. Pour cela, il suffit de procéder comme
décrit au chapitre I-3-3-5 où les efforts internes sont déterminés
d'après l'équation (I-46), faisant ainsi intervenir les composantes
de pression dans le calcul de la géométrie d'équilibre.
Figs.II-12b Influence de la pression interne Partant d'un maillage initial plan (figure II-12a), on constate que la forme minimale
obtenue est en fait une portion de sphère dont le diamètre dépend de la valeur de pression
interne spécifiée (figures II-12b).
-f- Une dernière application illustre la possibilité
de calculer des configurations mixtes en combinant
les procédures DEminl et DEmin
s . L'exemple choisi
représente un film de savon créé entre un cadre
extérieur fixe et un fil circulaire intérieur de tension
variable (figures II-13a et b). Si le ratio α σ σ= 0 0m c
/
diminue, on constate que le rayon du fil diminue
également (figures II-13c et d).
Fig.II-13a Vue en perspective
Fig.II-13b Maillage de départ
Fig.II-13c Forme avec α = 1
Fig.II-13d Forme avec α = 0 8.
Les différents exemples présentés nous permettent de souligner la cohérence des
résultats obtenus et légitiment ainsi l'usage des procédés de Densités en tant qu'instrument
d'investigation des formes minima.

Formes Minimales et Gradient Conjugué 53
II-3 Recherche de Formes Minimales par la Méthode du Gradient
Conjugué
Après avoir mis en évidence la possibilité d'effectuer une Recherche de Forme des
configurations minimales au moyen des méthodes de Densités, l'étude est à présent envisagée
selon une démarche fondamentalement différente mais respectant la condition d'uniformité
des tensions, c'est à dire la stabilité des systèmes calculés.
L'approche découle des considérations décrites dans le chapitre suivant.
II-3-1 Formes minimales et forces internes
Pour un réseau de câbles nous allons considérer la fonction ( )L = Xf où X est le
vecteur généralisé des coordonnées des noeuds de la structure. En considérant la relation
d'équilibre (I-2) et sachant que la répartition des tensions est uniforme ( t tk0 0= ), on a :
( )∂
∂
f
j= j=
X
X
X
t ti
i
j
c
jXc
ciXj
i i
= = =∑ ∑2
1 0 1 0
1
lfi
fi (II-28)
Il est alors possible de dire que les équations suivantes sont équivalentes :
∂
∂
∂
∂
∂
∂
L L L
X Y Zi i i
= = = 0 et fi fi fiiX iY iZ= = = 0 (II-29)
Dans le cas d'une surface d'aire minimale on envisage ( )S X= ==∑ s fmkk
M
1
avec
smk k k=1
2l lb h . Si la précontrainte est uniforme ( σ σ0 0
k = ), il vient selon la relation
d'équilibre surfacique (I-26) :
( )∂
∂
∂
∂ σ
f
X XX
i
j
j
j
ij
mj
ji
j
m
mjX
m
j
mi
j
i iX= = =
= = =∑ ∑ ∑
1
2 2
1
2
1
14
1 01
1
( ) ( )b
h
h b
h epfi
l
l
l l
l (II-30)
Il apparaît également les équivalences :
( ) ( ) ( )∂
∂
∂
∂
∂
∂
f
X
f
Y
f
Zi i i
X X X= = = 0 et fi fi fiiX iY iZ= = = 0 (II-31)
En considérant que les termes constants sont pris égaux à un ( σ0 0 1= =t avec epm = 1)
et en définissant le vecteur ( ) g g= X qui correspond au vecteur généralisé des efforts
internes, nous pouvons ainsi formuler que g est en fait le gradient de la fonction ( )f X L= ou
S selon le cas étudié.
La recherche d'une forme minimale d'équilibre se comprend dès lors comme étant
également un problème de minimisation de f. Comme le calcul de son gradient est possible
par l'intermédiaire de l'évaluation des efforts internes de la structure, ce problème
d'optimisation peut être abordé selon la Méthode du Gradient Conjugué.

54 Partie II
II-3-2 La Méthode du Gradient Conjugué
II-3-2-1 Considérations générales
Ce procédé peut être envisagé pour minimiser la fonctionnelle non linéaire f en
considérant son gradient g selon une démarche itérative de la forme [MAG 52] :
X Xp p p pd+ = +1 α avec dpour p
d pour pp
p
p p p
=− =
− + ≥
−
g
g
1
21β (II-32)
Le facteur βp est un scalaire et αp correspond à la longueur de pas obtenue d'après une
recherche unidimensionnelle pour la direction de descente dp et appelée Recherche de Ligne
exacte.
Le vecteur dp est un vecteur de descente si gp pd, < 0 .
Cette relation peut s'écrire :
fp ( )' 0 0< (II-33)
où f gp p p p p( ) ( ) d' ,α α= en définissant les fonctions du scalaire αp telles que :
f fp p p p p p( ) ( d )α α= +X et g gp p p p p p( ) ( d )α α= +X (II-34)
Nous notons au passage que f fp p( )0 = ainsi que g gp p( )0 = .
Toutefois, la spécification f fp p+ <1 signifiant que la fonction décroît à chaque étape
n'est pas complètement satisfaisante car elle peut autoriser de faibles réductions de f
relativement à la réduction optimale qui pourrait être obtenue par une Recherche de Ligne
exacte. Les conditions sur αp vérifiant cette volonté sont formulées par les conditions Fortes
de Wolfe (FW) [MOR 90] :
f f fp p p p p( ) ( ) ( )α µ α≤ +0 0' et f fp p p( ) ( )' 'α η≤ 0 avec 01
2< < <µ η (II-35)
Différentes valeurs de βp ont été proposées par Fletcher et Reeves (FR) ainsi que par Polak et
Ribière (PR); elles sont données par les formules [FLE 72] :
β pFR p p
p p
= ≥− −
g g
g g
,
,1 1
0 et β pPR p p p
p p
=− −
− −
g g g
g g
,
,
1
1 1
(II-36)
Bien que les performances numériques de la méthode FR soient souvent inférieures à
celles de la méthode PR, A. Baali a démontré que si le procédé FR remplit les conditions
Fortes de Wolfe (II-35) alors il vient g g gp p p pd, ,≤ −τ où τ est un réel positif et par voie
de conséquence la contrainte fp ( )' 0 0< est respectée [BAA 85].
De plus, Zoutendendijk a souligné la convergence globale sur des fonctions générales de la
méthode FR et prouvé qu'elle ne pouvait échouer [ZOU 70].

Formes Minimales et Gradient Conjugué 55
Gilbert et Nocédal ont porté un intérêt tout particulier sur la méthode PR; leurs études
ont mis en évidence deux points majeurs [GIL 92]. En premier lieu, la spécification
β βpPR
pFR≤ entraîne la convergence globale du procédé. Cette démarche est appelée "méthode
PR contrainte par la méthode FR".
Le second commentaire est relatif à la condition de Descente Suffisante (DS) qui impose :
g g gp p p pd, ,≤ −ω avec 0 1< ≤ω et g g g gp p p p pPR
p pd d, , ,≤ − + −β 1 (II-37)
La spécification g g g gp p p p, ,− ≤1 d'après (II-36) pendant que les conditions DS sont
respectées conduit vers une limite inférieure nulle lim p pinf
,g g = 0 et ainsi vers la convergence
globale du processus.
Les exemples numériques que nous allons présenter vont permettre de comparer ces
deux approches : la méthode FR et une version optimisée de la méthode PR dans laquelle les
remarques de Gilbert et Nocédal sont vérifiées, c'est à dire :
β β βpOP
pFR
pPRmin=
+
, avec β βpPR
pPRmax
+
= ,0 (II-38)
II-3-2-2 Les procédures de Recherche de Ligne
Le principal problème est ici de trouver une longueur de pas acceptable αp qui respecte
les conditions FW. Plusieurs méthodes ont été proposées; elles reposent principalement sur
des algorithmes de Recherche de Ligne qui génèrent des séquences de valeurs estimées αpk et
se terminent lorsqu'un point acceptable satisfait aux conditions requises.
Gilbert et Nocédal ont insisté sur l'efficacité de l'approche suggérée par More et Thuente
[MOR 90]. Cette méthode a pour objectif de trouver un acceptable αpk dans le sens qu'il
appartient à l'ensemble Tp ( )µ défini selon :
T f f f f fp p p p p p p p p p( ) : ( ) ( ) ( ) et ( ) ( )µ α α µ α α µ= > ≤ + ≤0 0 0 0' ' ' (II-39)
A partir de [ ]α α αp pmin pmax0∈ , , l'algorithme de recherche engendre une séquence
d'intervalles emboîtés Ipk et une séquence de valeurs itératives
[ ]α α αp p pmin pmaxI
k k∈ ∩ , jusqu'à ce que αpk
appartienne à Tp ( )µ .
La limite inférieure αpmin est donnée par l'utilisateur pendant que la limite supérieure αpmax
peut être évaluée par la relation :
αµ
pmax
p pmin
p
( )
( )=
−
−
1 0
0
f f
f'
(II-40)

56 Partie II
Elle correspond ainsi au point d'intersection entre la µ−ligne d' équation f fp p p( ) ( )0 0= −µ α '
et la ligne f fp p pmin( )α = où fpmin
est la plus basse valeur de fp p( )α également spécifiée
par l'utilisateur.
Le procédé itératif réclame de plus la définition de la fonction auxiliaire :
Ψp p p p p p p( ) ( ) ( ) ( )α α µ α= − −f f f0 0' et de sa dérivée Ψp p( )' α (II-41)
Avec αpmin= 0 et ainsi [ ] [ ]Ip pi ps pmax0 0 0
0= =α α α, , , l'algorithme est pour k = 1 2, ,.. :
i) Choisir une valeur test entre les bornes de l'intervalle [ ]α α αpt pi psk k k∈
− −1 1,
si αptk vérifie les conditions FW (II-35) alors α αp
MTpt=
k (arrêt de la procédure)
ii) Cas MT1 : si Ψ Ψp pt p pi( ) ( )α αk k
>−1
alors α αpi pik k=
−1 et α αps ptk k
= (II-42)
Cas MT2 : si Ψ Ψp pt p pi( ) ( )α αk k
≤−1
et Ψp pt pi pt( ) ( )' α α αk k k−
− >1
0
alors α αpi ptk k= et α αps psk k
=−1
(II-43)
Cas MT3 : si Ψ Ψp pt p pi( ) ( )α αk k
≤−1
et Ψp pt pi pt( ) ( )' α α αk k k−
− <1
0
alors α αpi ptk k= et α αps pik k
=−1
(II-44)
Cette démarche appelle plusieurs commentaires :
- C1- Si la situation MT2 se perpétue, la séquence α αpt pt1 2, .. augmente tout autant que l'on
continue à choisir des valeurs test dans [ ]α αpi pmaxk−1, , il faut ainsi que αpmax
puisse
éventuellement être requise comme valeur test; cela s'effectue en considérant :
α α δ α α αpt pi max pt pi pmaxmin ( )
k k k k= + −
− − −1 1 1, avec [ ]δmax ∈ 11 4. , (II-46)
L'algorithme se termine à αpmax si Ψp pmax
( )α ≤ 0 et Ψp pmax( )' α < 0 .
- C2 - Si le cas MT1 se répète, la séquence des valeurs test décroît et l'on peut forcer la
procédure à utiliser αpmin comme valeur par :
[ ]α α δ α αpt pmin min pi pminmax
k k∈
−, ,
1 avec δmin < 1 (II-47)
More et Thuente recommandent après plusieurs développements δmin =7
12.
L'algorithme s'arrête à αpmin si Ψp pmin
( )' α > 0 et Ψp pmin( )α ≥ 0 .
- C3 - Le choix de [ ]α α αpt pi psk k k∈
− −1 1, peut être fait librement, cependant une valeur
optimale existe et serait telle qu'elle minimiserait dans l'intervalle donné une fonction
polynomiale cubique interpolant fkp pt( )α , f
kp pt( )' α , f
kp pt( )α−1
et fkp pt( )
' α−1
.

Formes Minimales et Gradient Conjugué 57
Dans l'objectif de réduire les calculs, nous prendrons par la suite le point situé au milieu de
l'intervalle.
- C4 - Comme nous ne sommes pas forcément en mesure de spécifier la valeur de fpmin, le
choix fait selon f fpmin p ( )= 0 8 0. paraît acceptable.
L'utilisation de l'algorithme de Recherche de Ligne proposé par More et Thuente dans le
cadre de l'investigation de formes minimales nous a démontré des qualités d'efficacité et toute
confiance peut être accordée quant aux résultats obtenus.
Toutefois, le propos est à présent de mettre en avant une approche optimisée, et ce dans
l'objectif de réduire les temps de calcul nécessaires à la détermination d'une valeur acceptable
de longueur de pas.
La première proposition se rapporte à la spécification de αpmax.
Comme les valeurs de fp ( )' 0 décroissent pendant que p augmente, αpmax est susceptible
d'atteindre des valeurs élevées. Pour diminuer celle ci, nous suggérons de prendre :
αpOP p pmin
pmax
( )
( )=
−
−
f f
f
0
0' (II-48)
Cette valeur correspond en fait au point auquel la µ−ligne avec µ = 1 intersecte la droite
d'équation f fp p pmin( )α = . Si l'on vérifie que fp p
OP( )max
' α > 0 alors cette valeur est acceptée;
dans le cas contraire nous considèrerons αpmax défini par More et Thuente.
La seconde suggestion concerne la phase itérative d'encadrement des intervalles Ipk. Au
lieu de recourir au cas MT1 à MT3 , nous envisageons :
Cas MT1OP
: si fkp pt( )
' α ≥ 0 alors α αpi pik k=
−1 et α αps ptk k
= (II-49)
Cas MTOP2 : si f
kp pt( )' α < 0 alors α αpi ptk k
= et α αps psk k=
−1 (II-50)
Les remarques C1 à C4 sont toujours prises en considération; la valeur finale sera alors α pOP .
II-3-3 Applications numériques
Plusieurs exemples vont être présentés afin de comparer les différentes approches que
nous avons rencontrées. Le calcul du scalaire βp sera envisagé selon la proposition de
Fletcher et Reeves (βpFR à partir de II-36) ou bien en utilisant la valeur optimisée βp
OP sugérée
dans les relations (II-38).
De plus, l'évaluation de la longueur de pas sera effectuée par l'algorithme de More et Thuente
(α pMT ) ou selon la méthode modifiée que nous venons de mettre en exergue (α p
OP ).
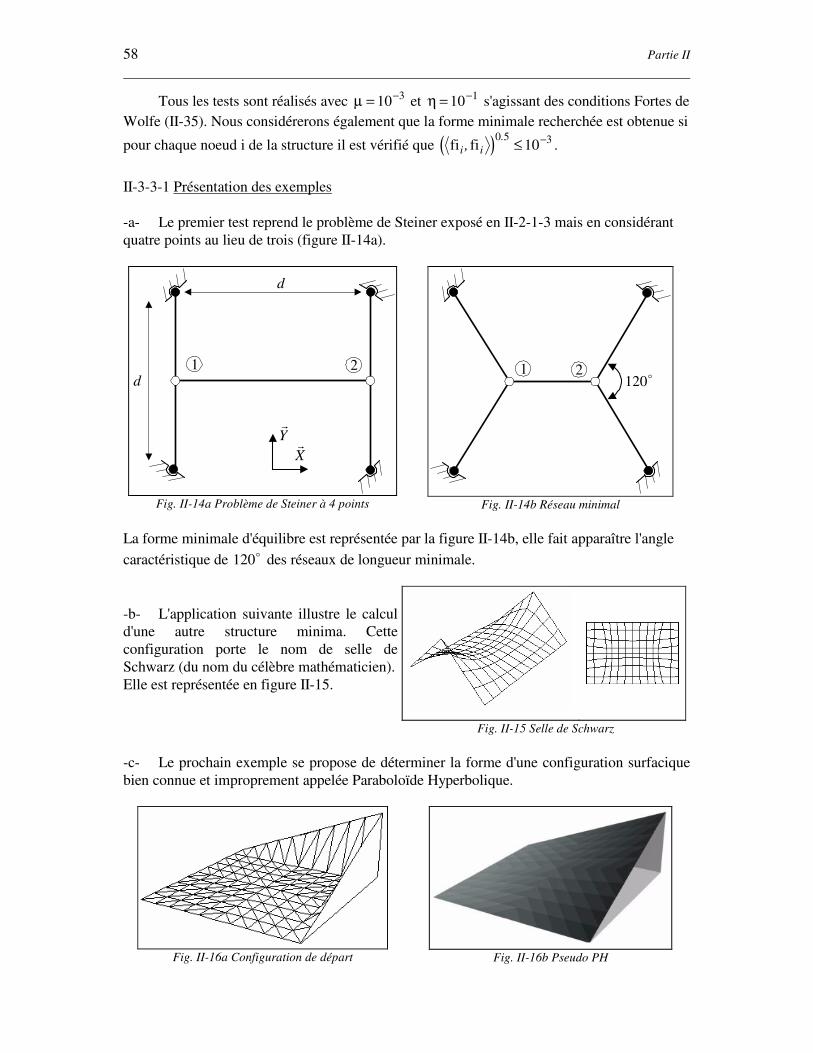
58 Partie II
Tous les tests sont réalisés avec µ = −10 3 et η = −10 1 s'agissant des conditions Fortes de
Wolfe (II-35). Nous considérerons également que la forme minimale recherchée est obtenue si
pour chaque noeud i de la structure il est vérifié que ( )fi fii i,.0 5 310≤ − .
II-3-3-1 Présentation des exemples
-a- Le premier test reprend le problème de Steiner exposé en II-2-1-3 mais en considérant
quatre points au lieu de trois (figure II-14a).
1 2
d
d
rX
rY
Fig. II-14a Problème de Steiner à 4 points
120o1 2
Fig. II-14b Réseau minimal
La forme minimale d'équilibre est représentée par la figure II-14b, elle fait apparaître l'angle
caractéristique de 120o des réseaux de longueur minimale.
-b- L'application suivante illustre le calcul
d'une autre structure minima. Cette
configuration porte le nom de selle de
Schwarz (du nom du célèbre mathématicien).
Elle est représentée en figure II-15.
Fig. II-15 Selle de Schwarz
-c- Le prochain exemple se propose de déterminer la forme d'une configuration surfacique
bien connue et improprement appelée Paraboloïde Hyperbolique.
Fig. II-16a Configuration de départ
Fig. II-16b Pseudo PH

Formes Minimales et Gradient Conjugué 59
La définition mathématique du PH correspond en fait à celle d'une surface réglée selon
Z k XY= qui ne peut pas être de courbure moyenne nulle. Nous choisirons ainsi de
dénommer "pseudo PH" la surface d'aire minimale obtenue. Le maillage initial et la forme
calculée apparaissent en figures II-16.
Fig. II-17a Surface de Scherk
-d- Toujours dans le cadre de la Recherche de
Forme de configurations connues, nous proposons
ensuite de procéder au calcul de la surface dite de
Scherk.
Cette forme typique (figure II-17a) est engendrée à
partir du maillage spatial figure II-17b.
Fig. II-17b Maillage initial
-e- Le dernier exemple a pour volonté d'illustrer un cas
de non convergence du procédé lorsque les conditions
d'appui ne permettent pas de créer une forme minimale
stable.
Un film est calculé entre deux cercles parallèles de rayon
10 et 2, distants d'une hauteur h = 4 . Pour ces valeurs,
partant du maillage défini dans la figure II-18a, on obtient
la forme en "chapeau chinois" représentée figure II-18b.
Par contre, si h = 6 , le processus diverge et nous pouvons
formuler les mêmes remarques qu'au chapitre II-2-2-3
relatif à la détermination d'une caténoïde.
Fig. II-18a Forme de départ
Fig. II-18b Chapeau chinois
Fig. II-18c Calcul divergent

60 Partie II
II-3-3-2 Comparaison des résultats
Nous allons présenter dans le tableau suivant une évaluation des performances liées aux
différentes approches possibles à partir des tests précédemment décrits.
Les résultats sont donnés sous la forme : procédé de calcul de βp / procédé de calcul de αp .
Par exemple OP/MT se réfère à une procédure selon βpOP et α p
MT . Le critère de performance
retenu correspond au temps de calcul nécessaire pour atteindre la forme minimale d'équilibre.
On peut en effet considérer que plus une méthode sera rapide, plus il sera possible de
demander une précision élevée pour un temps de calcul équivalent.
Les résultats sont normalisés de telle sorte que le procédé le plus rapide (en fait l'approche
effectuée d'après OP/OP) ait un coefficient de performance égal à un.
Procédé βp FR OP FR OP
de calcul αp MT MT OP OP
Steiner 4 points 2.3 1.9 1.2 1.0
Selle de Schwarz 5.3 3.8 1.4 1.0
Pseudo PH 3.0 2.2 1.3 1.0
Surface de Sherk 4.6 3.6 1.5 1.0
Chapeau chinois 4.4 2.5 1.4 1.0
PERFORMANCES 3.92 2.8 1.35 1.00
Tabl. II-1 Méthode du Gradient Conjugué : comparaison des performances
Ces résultats amènent aux commentaires suivants.
Les méthodes reposant sur l'utilisation de βpFR apparaissent clairement moins efficaces que les
procédures fondées sur βpOP
(dans un facteur proche de 1.4). Cette tendance ne fait que
confirmer les résultats obtenus par exemple par Gilbert et Nocédal sur un ensemble de divers
problèmes tests portant sur des fonctionnelles de différentes natures à minimiser.
De plus, l'utilisation de la méthode optimisée de Recherche de Ligne permet de réduire de
façon significative les temps de calcul par comparaison avec l'approche suggérée par More et
Thuente (facteur d'environ 2.8). Cette réduction se comprend en considérant que l'on spécifie
des intervalles de départ plus étroits (avec αpOP
max au lieu de αpmax
) et que les évaluations des
fonctions Ψp p( )α et Ψp p( )' α sont évitées durant la phase d'encadrement des valeurs.
Bien qu'il soit ici prématuré de poser des conclusions définitives, il est toutefois possible
de noter que les approches optimisées se distinguent par une plus grande rapidité et ainsi une
bonne adaptabilité dans le calcul des formes minimales.

Formes Minimales et Gradient Conjugué 61
II-3-3-3 Quelques autres configurations
Il s'agit à présent, à l'instar de l'exemple de structure mixte présentée lors de
l'investigation des configurations minimales par les méthodes de Densités, d'envisager une
stratégie mixte où un système comportant simultanément des éléments de câble et de
membrane est déterminé.
Pour cela, nous considérons une forme plane représentant un film créé entre un cadre
rectangulaire dont un côté est réalisé par l'intermédiaire d'un fil uniformément tendu (figure II-
19a).
Fig. II-19a Maillage initial
Fig. II-19b Film avec fil circulaire
La géométrie finale d'équilibre permet de vérifier que les éléments de câbles sont
disposés selon un arc de cercle (figure II-19b).
Le dernier exemple de surface minimale calculée
par la méthode du Gradient Conjugué n'est ici qu'à titre
illustratif et souligne la beauté ainsi que la régularité de
ces formes bien particulières.
Cette configuration porte le nom de Surface de
Schwarz (figure II-20).
Fig. II-20 Surface de Schwarz
Un rapide bilan effectué à ce stade de l'étude nous permet de mettre en avant l'utilisation
de la méthode du Gradient Conjugué comme outil de Recherche de Forme des configurations
minima. On peut dès lors songer à comparer ce procédé avec celui auparavant mis en place et
se référant aux méthodes de Densités.
Cet aspect est en partie l'objet du prochain chapitre où la possibilité de recourir à un
formalisme combinant ces deux méthodologies est également suggérée.
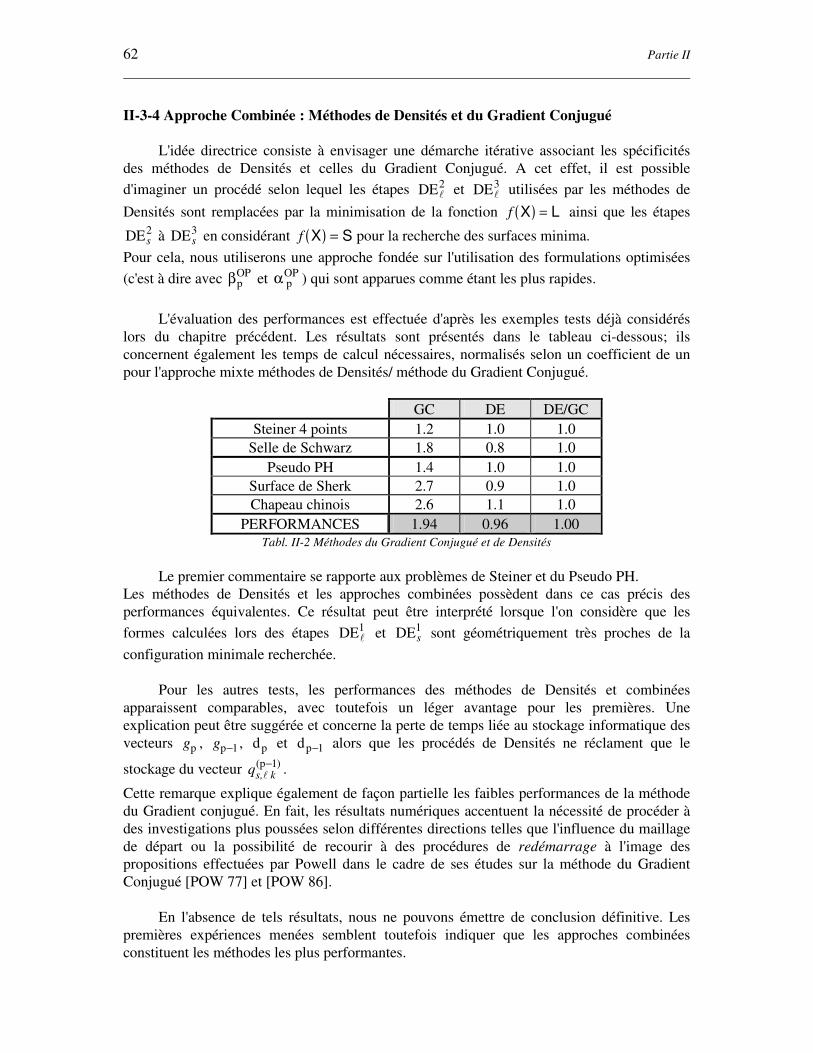
62 Partie II
II-3-4 Approche Combinée : Méthodes de Densités et du Gradient Conjugué
L'idée directrice consiste à envisager une démarche itérative associant les spécificités
des méthodes de Densités et celles du Gradient Conjugué. A cet effet, il est possible
d'imaginer un procédé selon lequel les étapes DEl
2 et DEl
3 utilisées par les méthodes de
Densités sont remplacées par la minimisation de la fonction ( )f X L= ainsi que les étapes
DEs2 à DEs
3 en considérant ( )f X S= pour la recherche des surfaces minima.
Pour cela, nous utiliserons une approche fondée sur l'utilisation des formulations optimisées
(c'est à dire avec βpOP
et α pOP
) qui sont apparues comme étant les plus rapides.
L'évaluation des performances est effectuée d'après les exemples tests déjà considérés
lors du chapitre précédent. Les résultats sont présentés dans le tableau ci-dessous; ils
concernent également les temps de calcul nécessaires, normalisés selon un coefficient de un
pour l'approche mixte méthodes de Densités/ méthode du Gradient Conjugué.
GC DE DE/GC
Steiner 4 points 1.2 1.0 1.0
Selle de Schwarz 1.8 0.8 1.0
Pseudo PH 1.4 1.0 1.0
Surface de Sherk 2.7 0.9 1.0
Chapeau chinois 2.6 1.1 1.0
PERFORMANCES 1.94 0.96 1.00
Tabl. II-2 Méthodes du Gradient Conjugué et de Densités
Le premier commentaire se rapporte aux problèmes de Steiner et du Pseudo PH.
Les méthodes de Densités et les approches combinées possèdent dans ce cas précis des
performances équivalentes. Ce résultat peut être interprété lorsque l'on considère que les
formes calculées lors des étapes DEl
1 et DEs1 sont géométriquement très proches de la
configuration minimale recherchée.
Pour les autres tests, les performances des méthodes de Densités et combinées
apparaissent comparables, avec toutefois un léger avantage pour les premières. Une
explication peut être suggérée et concerne la perte de temps liée au stockage informatique des
vecteurs gp , gp−1 , dp et dp−1 alors que les procédés de Densités ne réclament que le
stockage du vecteur qs k,l(p )−1 .
Cette remarque explique également de façon partielle les faibles performances de la méthode
du Gradient conjugué. En fait, les résultats numériques accentuent la nécessité de procéder à
des investigations plus poussées selon différentes directions telles que l'influence du maillage
de départ ou la possibilité de recourir à des procédures de redémarrage à l'image des
propositions effectuées par Powell dans le cadre de ses études sur la méthode du Gradient
Conjugué [POW 77] et [POW 86].
En l'absence de tels résultats, nous ne pouvons émettre de conclusion définitive. Les
premières expériences menées semblent toutefois indiquer que les approches combinées
constituent les méthodes les plus performantes.

Caractéristiques Géométriques des Surfaces 63
II-4 Détermination des Caractéristiques Géométriques des surfaces.
L'objectif est de proposer une méthode de maillage des surfaces qui va permettre de
calculer leurs principales caractéristiques de forme.
II-4-1 Principe de la méthode
Pour cela, nous allons tout d'abord supposer que la surface décrit un graphe selon la
relation Z f X Y= ( ), ; c'est à dire que toute droite verticale (X et Y = cstes) coupe le domaine
en un seul et unique point où il est possible de définir des directions principales de courbure
ainsi que les courbures principales ρ1 et ρ2 associées à ces directions.
En considérant les dérivées partielles :
pZ
X=
∂
∂ , q
Z
Y=
∂
∂ , r
Z
X=
∂
∂
2
2 , s
Z
X Y=
∂
∂ ∂
2
et tZ
Y=
∂
∂
2
2 (II-51)
Nous pouvons calculer la courbure moyenne H selon :
H ( )( ) ( )
( )= + =
+ − + +
+ +
1
2
1 2 1
2 11 2
2 2
2 2 3 2ρ ρ
p t pqs q r
p q/
(II-52)
ainsi que la courbure totale (ou gaussienne) G par :
222
2
21)1(
Gqp
str
++
−=ρρ= (II-53)
Le problème rencontré se réfère bien sûr au calcul des différentes dérivées partielles.
Pour cela, on va imaginer que chaque élément triangulaire à trois noeuds (T3) et subdivisé en
un élément à six noeuds (T6, figure II-21a) ou à dix noeuds (T10, figure II-21b).
Un triangle primaire T6 (T10) va alors pouvoir être considéré comme la somme de quatre
(neuf) triangles secondaires.
η
ξ
Fig. II-21a Triangle T6
ξ
η
Fig. II-21b Triangle T10
Il est alors possible d'effectuer une Recherche de Forme de la surface en considérant tous ces
triangles secondaires comme entités indépendantes.
Une fois la configuration d'équilibre obtenue, nous disposons des coordonnées des noeuds de
chaque triangle T6 ou T10 et le calcul des dérivées partielles peut dès lors s'envisager par
l'intermédiaire de leurs fonctions de forme respectives.

64 Partie II
Un triangle T6 utilisant une interpolation quadratique de sa géométrie, les termes de dérivées
secondes sont constants sur toute sa surface. Par contre, le triangle T10 reposant sur une
interpolation cubique, il s'ensuit que r, s, t dépendent des coordonnées intrinsèques ξ et η
choisies et l'on dispose ainsi d'une meilleure précision dans les diffférents calculs.
Nous noterons par la suite que deg = 6 ( deg = 10 ) pour un élément T6 (T10).
En effectuant un calcul de Z X Y( ), par l'intermédiaire des fonctions de forme de
l'élément, soit Z N Zim
ii
==∑
1
deg
, les dérivées partielles s'expriment alors par :
p N Zi Xm
ii
==∑ ,
1
deg
, q N Zi Ym
ii
==∑ ,
1
deg
, r N Zi XXm
ii
==∑ ,
1
deg
, s N Zi XYm
ii
==∑ ,
1
deg
et t N Zi YYm
ii
==∑ ,
1
deg
(II-54)
Les différents termes Ni Xm, , Ni Y
m, etc.. sont déterminés selon les relations fournies en annexe G
consacrée à l'étude des dérivations des fonctions de forme (formules G-8 et G-11).
La connaissance de H et de G permet également de calculer les valeurs des rayons de courbure
principaux R1 et R2 .
II-4-2 Applications
Afin d'illustrer les diverses possibilités offertes par cette démarche, nous allons
considérer une forme proche de celle d'un Pseudo Paraboloïde Hyperbolique et évaluer
l'évolution des caractéristiques géométriques sur deux éléments triangulaires primaires.
Partant d'une forme initiale plane composée de triangles primaires T3 (figure II-22a), on
divise le domaine en éléments secondaires T6 (figure II-22b) ou T10 (figure II-22c) pour
lesquels sont spécifiées les conditions d'appui requises.
Les dimensions de la structure sont définies par une base carrée de 10x10 avec une différence
maximale de niveau entre noeuds égale à 5.
Fig. II-22a Maillage initial Fig. II-22b Subdivision en T6 Fig. II-22c Subdivision en T10
Un premier calcul détermine la surface d'aire minimale s'appuyant sur le contour
précédemment défini; la figure II-23 représente la géométrie obtenue avec une subdivision T6.
Afin de comparer à nouveau les différences qui existent entre une approche surfacique et une
représentation linéaire d'un domaine, un second calcul envisage la structure en tant que réseau
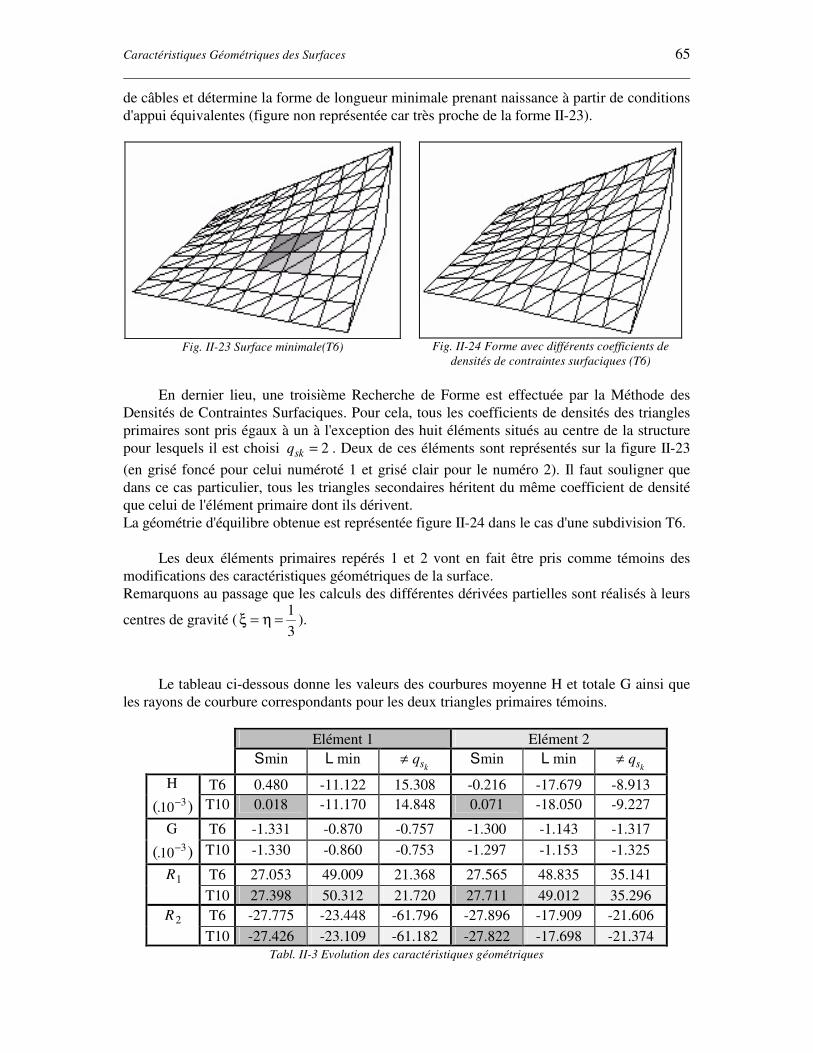
Caractéristiques Géométriques des Surfaces 65
de câbles et détermine la forme de longueur minimale prenant naissance à partir de conditions
d'appui équivalentes (figure non représentée car très proche de la forme II-23).
Fig. II-23 Surface minimale(T6)
Fig. II-24 Forme avec différents coefficients de
densités de contraintes surfaciques (T6)
En dernier lieu, une troisième Recherche de Forme est effectuée par la Méthode des
Densités de Contraintes Surfaciques. Pour cela, tous les coefficients de densités des triangles
primaires sont pris égaux à un à l'exception des huit éléments situés au centre de la structure
pour lesquels il est choisi qsk = 2 . Deux de ces éléments sont représentés sur la figure II-23
(en grisé foncé pour celui numéroté 1 et grisé clair pour le numéro 2). Il faut souligner que
dans ce cas particulier, tous les triangles secondaires héritent du même coefficient de densité
que celui de l'élément primaire dont ils dérivent.
La géométrie d'équilibre obtenue est représentée figure II-24 dans le cas d'une subdivision T6.
Les deux éléments primaires repérés 1 et 2 vont en fait être pris comme témoins des
modifications des caractéristiques géométriques de la surface.
Remarquons au passage que les calculs des différentes dérivées partielles sont réalisés à leurs
centres de gravité ( ξ η= =1
3).
Le tableau ci-dessous donne les valeurs des courbures moyenne H et totale G ainsi que
les rayons de courbure correspondants pour les deux triangles primaires témoins.
Elément 1 Elément 2
Smin L min ≠ qsk Smin L min ≠ qsk
H T6 0.480 -11.122 15.308 -0.216 -17.679 -8.913
( ).103− T10 0.018 -11.170 14.848 0.071 -18.050 -9.227
G T6 -1.331 -0.870 -0.757 -1.300 -1.143 -1.317
( ).103− T10 -1.330 -0.860 -0.753 -1.297 -1.153 -1.325
R1 T6 27.053 49.009 21.368 27.565 48.835 35.141
T10 27.398 50.312 21.720 27.711 49.012 35.296
R2 T6 -27.775 -23.448 -61.796 -27.896 -17.909 -21.606
T10 -27.426 -23.109 -61.182 -27.822 -17.698 -21.374
Tabl. II-3 Evolution des caractéristiques géométriques

66 Partie II
Ces résultats appellent plusieurs commentaires.
Tout d'abord, la prise en considération d'éléments T10 au lieu de T6 offre une précision accrue
dans les calculs effectués, on remarque par exemple que la courbure moyenne associée à la
surface minima est quasiment nulle.
Nous vérifions également qu'une géométrie représentative d'un réseau d'éléments linéaires de
longueur minimale n'est pas obligatoirement d'aire minimale. La différence est notable pour
les rayons de courbure dont les valeurs varient presque du simple au double.
Enfin, on peut souligner que la méthode des Densités de Contraintes Surfaciques permet
effectivement de modifier localement les courbures d'une surface en choisissant des
coefficients de densités adaptés.
Ce procédé de détermination des caractéristiques géométriques constitue également un
outil essentiel pour le concepteur de Membranes Textiles Architecturales.
Nous savons en effet que les informations relatives aux valeurs des courbures totales sont d'un
intérêt certain car elles sont directement liées aux difficultés rencontrées lors du
développement de la surface sur un plan, c'est à dire à l'occasion du processus de Découpe de
Laizes. La méthode proposée permettant d'obtenir une cartographie des courbures gaussienne
de la structure, elle représente ainsi une aide potentielle à la décision en mettant en évidence
les zones de la surface les plus problématiques et où le concepteur pourra par exemple
envisager de réduire les dimensions des laizes correspondantes.
Notons au passage que le procédé n'est pas spécifiquement limité au cas de systèmes
géométriquement décrits par l'intermédiaire de graphes sur toute leur surface. En effet, un
simple changement de repère où s'écrivent les différentes grandeurs permet toujours de se
ramener à l'échelle d'un élément triangulaire T6 ou T10 à une telle représentation (ne serait ce
qu'en considérant le repère local lié à ce dernier).

Conclusion de la Partie II 67
Conclusion
Notre volonté était d'appréhender la Recherche de Forme de configurations minimales
selon de nouvelles approches. Le critère retenu pour l'investigation des réseaux de câbles de
longueur minimale et des surfaces minima s'exprime par une tension uniforme au sein du
système, spécification garantissant la stabilité mécanique des configurations ainsi
déterminées.
En premier lieu, une démarche fondée sur l'utilisation des méthodes de Densités
précédemment définies selon une procédure itérative répond à cette attente. Les considérations
mécaniques mises en jeu permettent de retrouver des résultats théoriques connus et soulignent
l'étroite correspondance existant entre la méthode des Densités de Forces et celle des Densités
de Contraintes Surfaciques.
Les exemples numériques traités sont en accord avec l'observation des diverses formes
minimales naturelles et vérifient les principes géométriques fondamentaux associés à ces
systèmes.
Toutefois, dans une optique de diversification du thème abordé, nous suggérons dans un
second temps une approche différente reposant sur l'utilisation de la méthode du Gradient
Conjugué. Cet instrument permet en effet de minimiser les fonctionnelles adéquates et
d'obtenir ainsi les configurations recherchées.
Sa mise en place réclame cependant de nombreux développements à l'image de la
détermination des directions de descente et des longueurs de pas à adopter. On propose à cet
effet des méthodologies simplifiées qui offrent une réduction significative des temps de
calcul. Le débat reste néanmoins ouvert et il est possible d'envisager certaines études
complémentaires allant dans ce sens.
Nous mettons par ailleurs en avant la possibilité de combiner les deux approches citées; cette
démarche semble prometteuse et mérite également de faire l'objet d'attentions futures.
Le dernier thème abordé est l'occasion de proposer une méthode autorisant le calcul des
caractéristiques géométriques d'une surface. Les applications présentées soulignent sa validité
et laissent entrevoir de nombreux débouchés, notamment une aide à la détermination des
laizes constitutives d'une membrane textile.

Partie III
Découpe de Laizes et Mise en Prétension
des Membranes Textiles Architecturales
Introduction 69
Introduction
A l'image de tout processus de création, la conception des Membranes Textiles
Architecturales s'envisage comme une succession d'étapes auxquelles sont attachées des
problématiques particulières devant faire l'objet de réponses adaptées.
Le premier stade de l'étude se réfère ainsi aux procédés de Recherche de Forme où est
abordée l'analyse des relations constitutives associées aux paramètres de Formes et de
Forces. Les deux premières parties de ce mémoire sont consacrées à cette thématique et ont
permis d'apporter des solutions appropriées aux différents problèmes posés. Plusieurs
déclinaisons ont été envisagées, s'agissant de l'investigation de configurations minimales ou
bien de Recherche de Forme de structures tendues dans un contexte plus large.
Il est à présent temps d'élargir le domaine de l'étude en intégrant au débat un nouveau
paramètre, en l'occurrence celui qui représente le concept de Matériaux. La démarche n'est
en fait que le reflet de l'étape suivante du processus de conception où l'attention se porte sur
la réalisation d'une toile tendue à partir d'un modèle théorique issu du procédé de Recherche
de Forme. Plus précisément, l'objectif est de déterminer une configuration géométrique et
relationnelle initiale constituée par un assemblage d'éléments discontinus de forme plane
dénommés laizes.
L'ensemble des procédés mis en oeuvre à cette occasion constitue ainsi un processus dit de
Découpe de Laizes.
Son principe repose en premier lieu sur la spécification des lignes de partage et donc de
découpe de la surface appelées lisières. Cette opération peut s'effectuer selon diverses
considérations d'ordre géométrique, mécanique ou esthétique.
Chaque laize ayant été ainsi identifiée, le concepteur doit alors déterminer les formes planes
associées à chacune d'entre elles. De façon générale, les méthodes jusqu'à présent proposées
se décomposent en deux étapes dissociées.
La première consiste à projeter la laize tridimensionnelle considérée sur un plan; cette phase
répond couramment à l'appellation de développement.
L'étape suivante vise à prendre en considération les caractéristiques de prétension de celle-ci.
La démarche dépend nécessairement des propriétés rhéologiques du matériau; elle constitue
l'opération de réduction.
Si tout procédé de Découpe de Laizes est forcément source d'erreurs, nous montrerons
qu'il est toutefois possible d'atténuer ces imperfections en envisageant une démarche
fondamentalement différente de celle venant d'être exposée.
Une majeure partie des erreurs engendrées s'avérant en effet directement liée au découplage
du processus en deux opérations de développement et de réduction, ces travaux de thèse sont
l'occasion de proposer une nouvelle méthode de Découpe de Laizes fondée sur un support
théorique de nature différente et considérant ces étapes comme indissociables.
La réponse apportée est dénommée Méthode de Composition des Contraintes.
Par la suite, l'intérêt se porte sur la modélisation de la Mise en Prétension d'une laize.
Le propos consiste à valider le procédé de découpe proposé en comparant les caractéristiques
ainsi obtenues avec celles recherchées par le concepteur.

Découpe de Laizes des MTA 71
III-1 Découpe de Laizes des Membranes Textiles Architecturales III-1-1 Etude des différents procédés Ce chapitre suit le fil conducteur de toute méthode de Découpe de Laizes. Nous présenterons ainsi en premier lieu les méthodes liées à la détermination des lisières puis, dans un second temps, ceux en corrélation avec les processus de recherche des formes planes. III-1-1-1 Les méthodes de détermination des lisières
Débutons le propos en notant que ce thème ne fera l'objet d'aucun développement dans le cadre de ces travaux. On se limitera ainsi à l'exposé des principales considérations sur lesquelles reposent les divers procédés. Ce type de processus s'avère en fait être le fruit de plusieurs compromis établis entre des exigences d'ordres variés et parfois antagonistes. -a- Aspects technologiques : Il s'agit ici de préciser que le concepteur doit avant tout tenir compte d'une largeur maximale des laizes en relation avec les produits disponibles auprès des fabricants de toiles textiles. Généralement, les tissus sont fournis sous forme de rouleaux larges d'environ deux mètres [FER 89]. -b- Aspects géométriques : On peut envisager de positionner les lignes de découpe sur des courbes géodésiques de la surface [LIN 87] et [BAR 88]. Cette démarche permet entre autre de générer des lisières de longueur minimale et certains considèrent qu'elle rejoint des préoccupations économiques où le concepteur désire réduire les chutes de toile inhérentes. Le débat reste toutefois ouvert. Nous savons de plus que tout développement sur un plan de surface à double courbure se traduit inévitablement par des distorsions. Il est alors judicieux de recourir à laizes de faibles dimensions sur une portion de la toile présentant des valeurs de courbure totale élevées. Soulignons à cet égard que les outils de détermination des caractéristiques géométriques des surfaces précédemment proposés (chapitre II-4) constituent une aide potentielle à la décision dans un tel cas. -c- Aspects esthétiques : Les cartes peuvent toutefois se brouiller lorsque la parole est donnée aux architectes. Leur créativité trouvera un possible terrain d'expression dans la réalisation sur la toile de motifs géométriques à partir d'échantillons aux couleurs différentes. De plus, il est manifeste que le rythme visuel apporté par le choix des lisières constitue une composante architecturale à part entière et peut ainsi être à l'origine de politiques de découpe différentes. III-1-1-2 La recherche des formes planes Avant de se livrer à un exposé des diverses méthodes de découpe proposées à ce jour, nous souhaitons tout d'abord mettre en lumière quelques principes directeurs associés à cette thématique. Tout procédé de découpe a pour objet la détermination d'une configuration de départ (laize découpée) destinée à être mise en place sur le site selon des conditions d'appui requises.
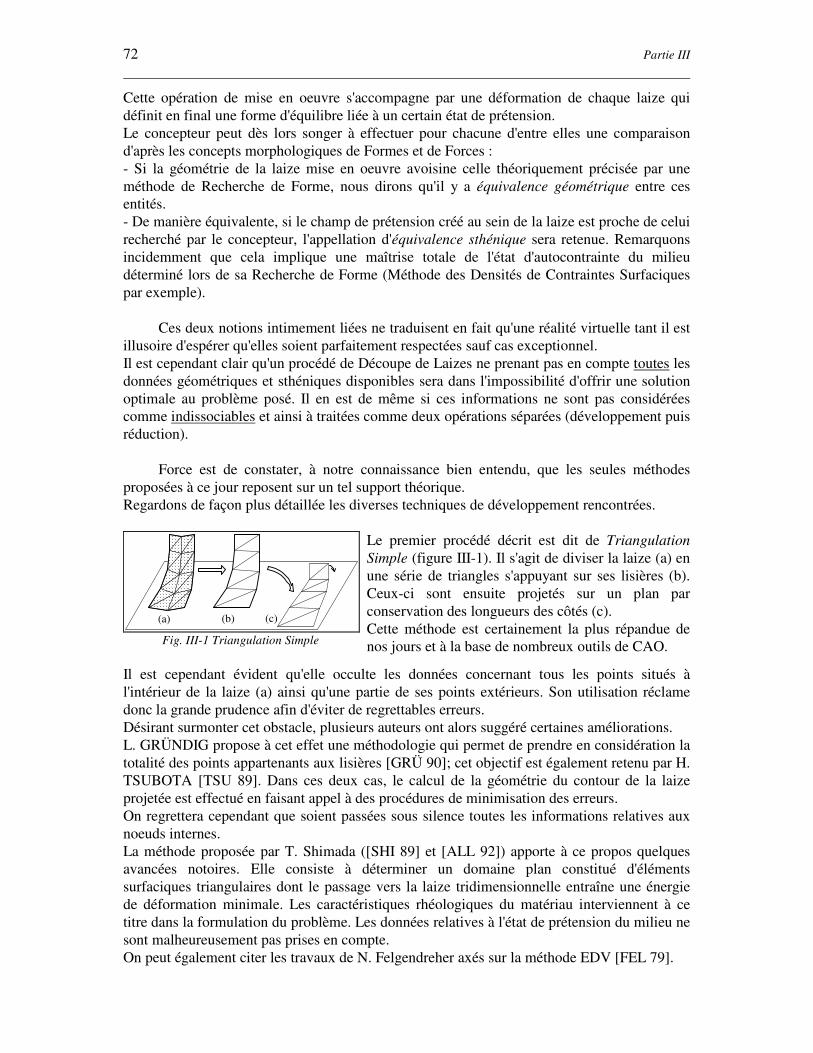
72 Partie III
Cette opération de mise en oeuvre s'accompagne par une déformation de chaque laize qui définit en final une forme d'équilibre liée à un certain état de prétension. Le concepteur peut dès lors songer à effectuer pour chacune d'entre elles une comparaison d'après les concepts morphologiques de Formes et de Forces : - Si la géométrie de la laize mise en oeuvre avoisine celle théoriquement précisée par une méthode de Recherche de Forme, nous dirons qu'il y a équivalence géométrique entre ces entités. - De manière équivalente, si le champ de prétension créé au sein de la laize est proche de celui recherché par le concepteur, l'appellation d'équivalence sthénique sera retenue. Remarquons incidemment que cela implique une maîtrise totale de l'état d'autocontrainte du milieu déterminé lors de sa Recherche de Forme (Méthode des Densités de Contraintes Surfaciques par exemple). Ces deux notions intimement liées ne traduisent en fait qu'une réalité virtuelle tant il est illusoire d'espérer qu'elles soient parfaitement respectées sauf cas exceptionnel. Il est cependant clair qu'un procédé de Découpe de Laizes ne prenant pas en compte toutes les données géométriques et sthéniques disponibles sera dans l'impossibilité d'offrir une solution optimale au problème posé. Il en est de même si ces informations ne sont pas considérées comme indissociables et ainsi à traitées comme deux opérations séparées (développement puis réduction). Force est de constater, à notre connaissance bien entendu, que les seules méthodes proposées à ce jour reposent sur un tel support théorique. Regardons de façon plus détaillée les diverses techniques de développement rencontrées.
(a) (b) (c)
Fig. III-1 Triangulation Simple
Le premier procédé décrit est dit de Triangulation
Simple (figure III-1). Il s'agit de diviser la laize (a) en une série de triangles s'appuyant sur ses lisières (b). Ceux-ci sont ensuite projetés sur un plan par conservation des longueurs des côtés (c). Cette méthode est certainement la plus répandue de nos jours et à la base de nombreux outils de CAO.
Il est cependant évident qu'elle occulte les données concernant tous les points situés à l'intérieur de la laize (a) ainsi qu'une partie de ses points extérieurs. Son utilisation réclame donc la grande prudence afin d'éviter de regrettables erreurs. Désirant surmonter cet obstacle, plusieurs auteurs ont alors suggéré certaines améliorations. L. GRÜNDIG propose à cet effet une méthodologie qui permet de prendre en considération la totalité des points appartenants aux lisières [GRÜ 90]; cet objectif est également retenu par H. TSUBOTA [TSU 89]. Dans ces deux cas, le calcul de la géométrie du contour de la laize projetée est effectué en faisant appel à des procédures de minimisation des erreurs. On regrettera cependant que soient passées sous silence toutes les informations relatives aux noeuds internes. La méthode proposée par T. Shimada ([SHI 89] et [ALL 92]) apporte à ce propos quelques avancées notoires. Elle consiste à déterminer un domaine plan constitué d'éléments surfaciques triangulaires dont le passage vers la laize tridimensionnelle entraîne une énergie de déformation minimale. Les caractéristiques rhéologiques du matériau interviennent à ce titre dans la formulation du problème. Les données relatives à l'état de prétension du milieu ne sont malheureusement pas prises en compte. On peut également citer les travaux de N. Felgendreher axés sur la méthode EDV [FEL 79].
Découpe de Laizes des MTA 73
Dans tous les cas, les procédés de développement de la laize doivent être suivis par une opération de réduction. On effectue généralement un simple changement d'échelle de la forme développée selon un facteur choisi par le concepteur. Son expérience joue ici un rôle prépondérant et la plus grande prudence est de rigueur. Laissons donc de côté tout procédé où les paramètres géométriques et sthéniques sont découplés. Un nouvel éclairage s'impose; une lecture du problème à sa lumière conduit vers un début de réponse dénommée Méthode de Composition des Contraintes. III-1-2 La Méthode de Composition des Contraintes III-1-2-1 Objectifs et principes généraux Considérons une Membrane Textile Architecturale ayant fait l'objet d'une Recherche de Forme selon une approche continue, sa géométrie est alors entièrement déterminée ainsi que l'état de prétension de tous ses éléments surfaciques constitutifs. Le concepteur a déjà divisé ce système en spécifiant ses lignes de découpes
On isole à présent une laize composée de m éléments définissant une configuration ΩL . Les points situés sur ses lisières seront appelés noeuds "frontières" (repérés • sur la figure III-2), les autres noeuds étant désignés comme "internes" (noeuds o).
Chaque vecteur élémentaire σ locm RdF
L est précisé à l'issue de la Recherche de Forme.
Le principe de la Découpe de Laizes consiste à déterminer une forme plane Ω0 telle que
la transformation de Ω0 en ΩL induise pour chaque élément un état de tension proche de
celui recherché σ locm RdF
L (équivalence sthénique).
On construit tout d'abord un plan de projection Pr à partir de trois points distants non alignés
de ΩL ; il sert de support à un repère global ( )r r rX Y Z .
Nous définissons ensuite une configuration Ω* dite intermédiaire située sur ce plan. Sa
géométrie est dans un premier temps déterminée en projetant orthogonalement la laize ΩL sur Pr .
La transformation de Ω* en ΩL se caractérise par la création d'un champ de contraintes
σlocm
L au sein du milieu (figure III-2).
Si pour tous les éléments on vérifie alors σ σlocm
locm
L
RdF
L= , l'objectif visé est atteint.
Dans le cas contraire, nous allons envisager la transformation (réduction par abus de langage)
de Ω* en un autre domaine plan Ω0 de telle sorte que ce passage engendre des contraintes
σlocm
redth
* compensant au mieux la différence existant entre σloc
m
L et σ loc
m RdF
L.
On suppose de plus que cette déformation s'effectue dans le cadre de l'Hypothèse des Petites
Perturbations (HPP). Remarque : nous insistons à ce niveau de l'étude sur le fait que cette réduction est purement théorique et à ce titre différente de celle qui sera réellement prise en compte.

74 Partie III
rX
rY
rZ
Laize 3D
HPP
Ω0
Ω*
ΩL
Plan parallèle
Pr
σlocm
L
σ locm RdF
L
σlocm
redth
*
au plan
Fig. III-2 Représentation des différentes configurations
Par extrapolation, il est alors possible d'assimiler le passage de Ω0 vers ΩL par
l'intermédiaire de Ω* comme une composition de deux transformations successives, chacune d'entre elles entrainant une évolution des contraintes au sein du milieu. Cette démarche constitue en fait une première estimation du domaine plan recherché
Ω0 . Il sera en effet nécessaire d'envisager différentes procédures itératives pour atteindre cet objectif. L'ensemble de ces opérations définissent ce que l'on dénommera Méthode de
Composition des Contraintes. III-1-2-2 Etude des transformations Ce chapitre vise à définir les différentes quantités mises en jeu à l'occasion des transformations successives.
rX
rY
rZ
Ω*
ΩL
σlocm
L
dm
*
L
Fig. III-3 Transformation Ω Ω*
→L
-a- Passage Ω Ω* → L : calcul de σlocm
L
Si l'on suppose que Ω* se transforme en ΩL selon un contexte de petites déformations (cf hypothèse H1) mais de grands déplacements, chaque tenseur élémentaire de Green-Lagrange peut être déterminé selon la relation (D-24) :
[ ] [ ] εmLm
NLm mb b d
* * * *
L L L( )= +
1
2 (III-1)

Découpe de Laizes des MTA 75
En considérant la matrice d'élasticité [ ]Eortm
* définie dans le repère d'orthotropie associé à
chaque élément de Ω* , on écrit dans le repère global ( )r r rX Y Z en se référant à (C-12 et 15) :
[ ] [ ] [ ] [ ] [ ] [ ]E T T E T Tm m T m T
ortm m m
* *,ort
* *,ort
* *= ε ε ε ε (III-2)
Nous pouvons ainsi calculer les tenseur élémentaire PK2 par (C-7) :
[ ] S Em m m
* * *
L L= ε (III-3)
Les tenseurs élémentaires gradients de transformation [ ]Fm
*
L entre Ω* et ΩL s'expriment
d'après les repères covariants et contravariants associés à ces configurations (précisés en D-3 et D-5) selon le produit tensoriel :
[ ]F g gm
ii
**
L
L= ⊗ (III-4)
Il est alors possible de déterminer le tenseur des contraintes de Cauchy sur l'élément par (B-4):
[ ] [ ] [ ] [ ] [ ]σm m m m m TF F S F
L
L L L L( )det ( )= −
* * * *
1 (III-5)
Soit, dans le repère local de l'élément et sous forme vectorielle (C-18) :
[ ] σ σσlocm m m
TL L L
= (III-6)
Cette démarche permet de calculer les vecteurs de prétension élémentaires σlocm
L
induits par la transformation de Ω* en ΩL ; on les assemble pour former le vecteur généralisé
σloc L.
rX
rY
rZ
Ω*Ω0
Fig. III-4 Transformation Ω Ω
*→
0
-b- Passage Ω Ω* → 0 : relation entre dl *
0 et df *
0
Le passage de Ω* à Ω0 s'effectue en agissant sur
les conditions aux limites des noeuds frontières de Ω* . Pour éviter tout mouvement de solide rigide, un noeud
frontière est totalement fixe selon les axes rX et
rY (noeud
de Ω* repéré • sur la figure III-4) et un autre astreint à
rester sur l'axe Y = 0 . Bien entendu, tous les noeuds sont bloqués selon l'axe rZ .
Ce système comprend alors nl degrés de "liberté" (noeuds internes de Ω* ) et nf autres
degrés associés aux noeuds frontières non fixés.
Le vecteur d*
0 est ainsi décomposé en :
d d d* * *
0 0 0= ⊕l f (III-7)

76 Partie III
Nous effectuons la transformation de Ω* vers Ω0 en considérant un déplacement
df *
0 des noeuds frontières de Ω* . La position des noeuds libres dans Ω0 dépend alors de
celui-ci; il est possible de déterminer dl *
0 selon le raisonnement suivant.
Les matrices élémentaires de rigidité linéaire [ ]kLm
* définies sur Ω* (relations B-37) peuvent
être assemblées pour former la matrice de rigidité généralisée du système [ ]KL *.
On la décompose alors en considérant ses termes relatifs aux nl degrés de liberté et ceux
associés aux nf autres degrés :
[ ][ ] [ ][ ] [ ]
KK K
K KL
L L
L L
*
*
=
l l
l
f
f f
avec [ ]KL
n n
l
l l
*.( )
et [ ]KL
n n
l
l
f
( f )*
.
(III-8)
Le vecteur déplacement généralisé associé aux noeuds internes dépend alors des déplacements des noeuds frontières selon :
[ ] [ ] [ ] d K K d K dL Ll l l* * * * * *
~0 1 0 0= − =
−
f f f f (III-9)
Nous avons ainsi la relation :
[ ][ ]
[ ] dd
d
K
Idd M d
*
**
* * *
~
00
0 0=
=
=l
f
f
f f f
fn
(III-10)
Dans le cadre de l'HPP, la transformation de Ω* en Ω0 se traduit par les vecteurs élémentaires de contraintes de Cauchy :
[ ] [ ] [ ] [ ] σ σ σlocm m m
Lm m m
T E b d n dred * * * * * * *= =
0 0 (III-11)
Ces relations s'assemblent pour aboutir à l'écriture généralisée :
[ ] σ σloc N dred * * *= 0 (III-12)
De fait, le vecteur généralisé de réduction des contraintes provenant du passage de Ω* à Ω0 est égal à :
[ ] [ ] [ ] σ σ σloc N M d dred f f fA* * * * * *
= =0 0
(III-13)
III-1-2-3 Détermination du domaine Ω0
Nous pouvons à présent calculer l'état de prétension σloc L généré dans le milieu
lorsque Ω* se déforme en ΩL . Il est ainsi possible de le comparer avec celui spécifié à l'issue
du procédé de Recherche de Forme σ locRdF
L et évaluer la différence :
σ σ σloc loc locdif
L L
RdF
L= − (III-14)

Découpe de Laizes des MTA 77
L'idée consiste à imaginer que le passage de Ω* à Ω0 dans le cadre de l'hypothèse des Petites
Perturbations correspond à la création d'un champ de contraintes σloc redth
* caractérisé par :
σ σloc locredth dif
L*= (III-15)
Nous cherchons alors un vecteur déplacement noté dfth
*
0des noeuds frontières de Ω* qui
assure la relation σ σloc locred redth
* *= .
La notation σloc redth
* se comprend comme se référant à une variation théorique des
contraintes de telle sorte que la transformation de Ω0 en ΩL par l'intermédiaire de Ω*
engendre une contrainte voisine de σ locmRdF
L, c'est à dire en final que
σ σ σ σloc loc loc locm( )L
L redth RdF
LΩ Ω
0→ = − ≈
*.
Cette démarche prend ainsi le nom de Composition des Contraintes.
En considérant le vecteur généralisé Bσ * défini par :
B redth
L
RdF
Lσ σ σ σ* *
= = −loc loc loc (III-16)
Il vient la relation fondamentale (soit un système à 3m équations et nf inconnues) :
[ ] A Bfth
σ σ* * *d
0= (III-17)
Comme sur toute laize on a 3m > nf , ce système est inconsistant et n'admet pas, en
général, de solution. Sa résolution est ainsi envisagée par une méthode de Moindres Carrés
qui permet de déterminer le vecteur généralisé d f *
0 qui réalise le minimum de la
fonctionnelle [ ] Θ( )f fA Bd d* * * *
0 0
2= −σ σ .
Si plusieurs solutions vérifient cette condition, les méthodes de Moindres Carrés considérées
identifient celle de plus petite norme euclidienne, soit d fcal
*
0.
Notre attention s'est portée sur deux procédés numériques : la résolution par Factorisation de Householder et celle par Inverses Généralisés. Des commentaires et explications plus détaillées sont disponibles en annexe H. Après avoir mis en évidence le vecteur généralisé des déplacements des noeuds
frontières de Ω* vers Ω0 , soit d fcal
*
0, il est possible de préciser la variation calculée (et non
plus théorique) du vecteur généralisé de réduction des contraintes avec :
[ ] σ σloc dredcal
fcalA
* * *=
0 (III-18)

78 Partie III
On peut alors définir un taux d'erreur initiale ∆σ∗L traduisant le passage de Ω* à ΩL par :
∆σ∗ =
−L
RdF
L L
RdF
L
σ σ
σ
loc loc
loc
(III-19)
ainsi qu'un taux d'erreur finale ∆σ0L illustrant la transformation de Ω0 en ΩL par
l'intermédiaire de Ω* selon la relation :
∆σ0
L
RdF
L L redcal
RdF
L
=− +σ σ σ
σ
loc loc loc
loc
* (III-20)
Ces deux quantités témoignent de l'importance de la déformation du domaine ayant eu
lieu lors du passage de Ω* vers Ω0 . En effet, si ∆σ∗L est très grand devant ∆σ0
L cela signifie
que σloc redcal
* est important et par voie de conséquence le tenseur généralisé εred
cal
*
0
également. L'hypothèse initiale de petites perturbations entre Ω* et Ω0 ne peut plus être émise dans cette situation. A cet effet, nous proposons de modifier (réduire) le vecteur généralisé des déplacements
d fcal
*
0 selon la correction :
d dfmod
L
L fcal
* *
0 0 0=
∗
∆σ
∆σ (III-21)
Il convient ensuite de reprendre les calculs de σloc red * par (III-18) ainsi que ceux de ∆σ∗
L
et ∆σ0L en considérant à présent d f
mod
*
0 afin d'évaluer si une autre réduction s'impose. Cette
démarche se poursuit jusqu'à obtenir un rapport :
∆σ
∆σ
0L
L∗
≈ τ (III-22)
Les différents tests entrepris ont mis en évidence la cohérence des résultats obtenus en choisissant une valeur τ = 0 8. .
Une fois que le vecteur d f *
0 est déterminé, on calcule d
*
0 avec la relation (III-10); la
géométrie de la configuration Ω0 est alors entièrement précisée.

Découpe de Laizes des MTA 79
III-1-2-3 Méthodologie Les chapitres précédents illustrent une démarche où, partant d'un premier domaine
intermédiaire Ω* (soit ( )Ω* 1 ) on a déterminé une première configuration Ω0 (c'est à dire une
évaluation notée ( )Ω0 1 ) relative à la laize tridimensionnelle ΩL . Nous voyons dès lors se dessiner le schéma directeur du procédé de Découpe de Laizes proposé et dénommé Méthode de Composition des Contraintes. La méthode consiste à réitérer le procédé en considérant une seconde configuration
intermédiaire définie par ( ) ( )Ω Ω* 2 0 1= .
On obtient alors une autre estimation du domaine plan ( )Ω0 2 à partir de laquelle il est
possible de spécifier Ω Ω*( ) ( )3 0 2= et ainsi de suite (figure III-5).
( )Ω0 1
Ω0
( )Ω* 1
ΩL
( )Ω* 2 ( )Ω0 2
projection
orthogonale
convergence
Fig. III-5 Méthode de Composition des Contraintes
Plus généralement, le procédé se répète de façon itérative et trois situations distinctes peuvent se présenter à l'itération p :
-a- Les taux successifs d'erreurs initiales ∆σ∗L(p) ne cessent d'augmenter ou bien restent
proches d'une valeur élevée. Dans ce cas là, on considère que le processus est divergent et l'on conclue à l'impossibilité de
déterminer la laize plane associée au domaine ΩL par cette méthode.
-b- On observe que la suite des ∆σ∗L(p) décroit et converge vers zéro.
Dans cette situation, le procédé est arrété lorsque ∆σ∗ <L(p) ζ avec ζ petit devant l'unité (nous
prendrons ζ = −10 2 ).
-c- Les valeurs ∆σ∗L(p) diminuent mais convergent vers une valeur ∆σ∗
∞ ≠L( ) 0 .
On arrète le processus à l'itération p si ∆σ ∆σ
∆σ
∗ ∗−
∗
−<
L(p) L(p )
L(p)
1
ζ .
Il faut ici spécifier un taux d'erreur maximale acceptable ∆σ∗L max . Si la configuration Ω*(p)
vérifie ∆σ ∆σ∗ ∗<L(p) L max , elle est dénommée laize optimale.
Dans le cas contraire, nous estimons que le procédé a échoué et ne permet pas de déterminer
la forme plane associée à ΩL .
La valeur de ∆σ∗L max fera l'objet d'une discussion à l'occasion des exemples présentés.
80 Partie III
La méthode de Composition des Contraintes (MCC) peut être décrite d'après l'algorithme itératif suivant : MCC1 :
MCC2 :
MCC3 :
MCC4
Spécifier une configuration intermédiaire de départ Ω*(p )=1 .
Calculer le taux d'erreur initiale ∆σ∗L(p) .
Si ∆σ∗ <L(p) ζ ou ∆σ ∆σ
∆σ
∗ ∗−
∗
−<
L(p) L(p )
L(p)
1
ζ , aller à l'étape MCC4 .
Sinon, passer à l'étape suivante MCC3 .
Déterminer le domaine plan Ω0(p) .
Retourner à MCC2 en posant Ω Ω*(p ) (p)+ =1 0 puis p p 1= + .
Si ∆σ ∆σ∗ ∗<L(p) L max on a obtenu la géométrie plane recherchée selon
Ω Ω0 = *(p) . Dans le cas contraire le procédé ne permet pas de déterminer Ω0 .
III-1-2-4 Mise en oeuvre du procédé Il s'agit de préciser tout d'abord les diverses modalités qui seront suivies à l'occasion des exemples présentés. Les caractéristiques rhéologiques du matériau envisagé sont celles d'un complexe commercialisé [FER 89] et mesurées par différents essais de caractérisation [TRO 92] : Emc = 23000 daN / m ; Emt = 24900 daN / m et νct = 0 097. .
On calcule νtc selon la relation de symétrie (C-10), soit νtc = 0 090. .
Nous remarquons que les valeurs de modules d'élasticité font directement intervenir l'épaisseur de la toile. Il suffira alors de ne pas prendre en compte ce terme lors de l'intégration des différentes quantités (matrices de rigidité par exemple) sur les volumes élémentaires. L'orientation des repères d'orthotropie du matériau est laissée au libre choix du concepteur. Cependant, elle s'effectue habituellement en disposant la direction de la chaîne du tissu selon les côtés de plus grande longueur de la laize. Cette mesure tient au procédé de fabrication de la toile ainsi qu'à son conditionnement.
Nous orienterons donc la trame du tissu sur l'axe rX du plan de projection et la chaîne sur
l'axe rY .
III-1-2-5 Applications L'objectif n'est pas de traiter exhaustivement le sujet mais plutôt d'initier la réflexion à partir de quelques exemples simples. A cet effet, les laizes étudiées seront issues de formes minimales; c'est à dire caractérisées par
un état de prétension uniforme et isotrope de la forme σ σ σlocm RdF
L L= 0 0 0 .
La valeur de σ0 est liée aux caractéristiques mécaniques du matériau utilisé et fait l'objet
d'indications de la part du fabricant. Dans le cas présent, nous prendrons σ0 250= daN / m .
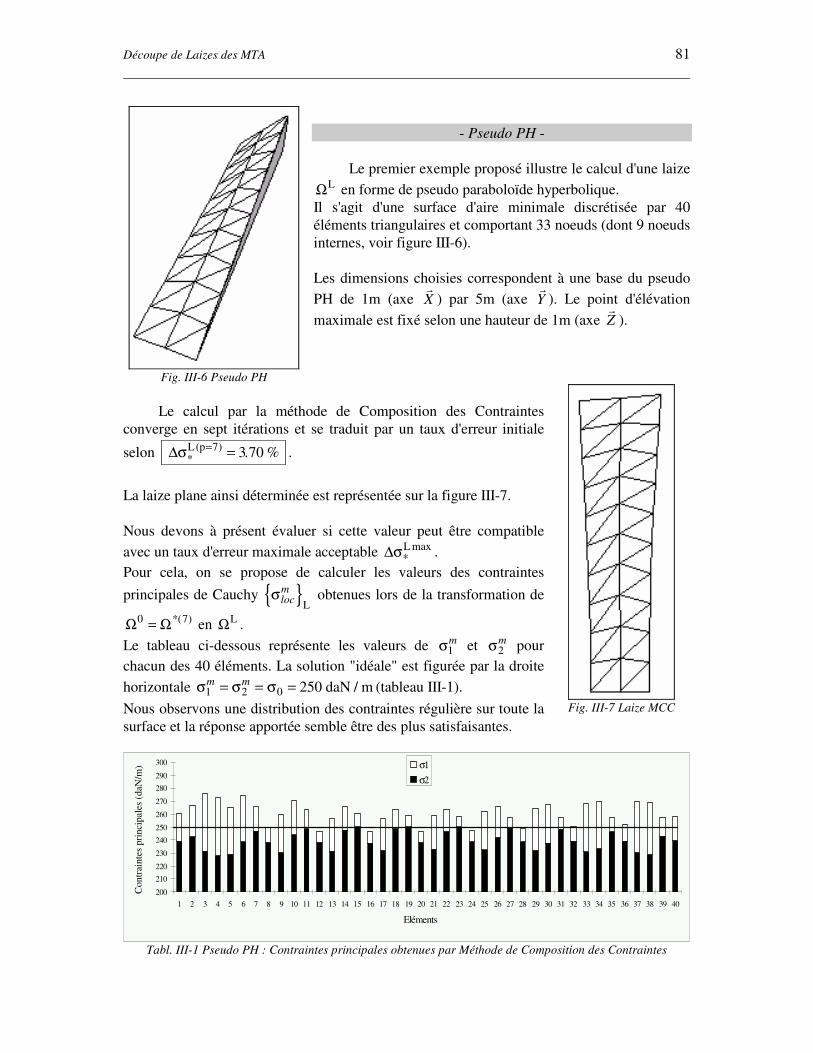
Découpe de Laizes des MTA 81
Fig. III-6 Pseudo PH
- Pseudo PH -
Le premier exemple proposé illustre le calcul d'une laize
ΩL en forme de pseudo paraboloïde hyperbolique.
Il s'agit d'une surface d'aire minimale discrétisée par 40
éléments triangulaires et comportant 33 noeuds (dont 9 noeuds
internes, voir figure III-6).
Les dimensions choisies correspondent à une base du pseudo
PH de 1m (axe rX ) par 5m (axe
rY ). Le point d'élévation
maximale est fixé selon une hauteur de 1m (axe rZ ).
Le calcul par la méthode de Composition des Contraintes
converge en sept itérations et se traduit par un taux d'erreur initiale
selon ∆σ∗=
=L(p )7 3 70. % .
La laize plane ainsi déterminée est représentée sur la figure III-7.
Nous devons à présent évaluer si cette valeur peut être compatible
avec un taux d'erreur maximale acceptable ∆σ∗L max .
Pour cela, on se propose de calculer les valeurs des contraintes
principales de Cauchy σlocm
L obtenues lors de la transformation de
Ω Ω0 7
=*( ) en Ω
L .
Le tableau ci-dessous représente les valeurs de σ1m et σ2
m pour
chacun des 40 éléments. La solution "idéale" est figurée par la droite
horizontale σ σ σ1 2 0 250m m= = = daN / m (tableau III-1).
Nous observons une distribution des contraintes régulière sur toute la
surface et la réponse apportée semble être des plus satisfaisantes.
Fig. III-7 Laize MCC
200
210
220
230
240
250
260
270
280
290
300
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
Eléments
σ1
σ2
Contr
ainte
s pri
nci
pal
es (
daN
/m)
Tabl. III-1 Pseudo PH : Contraintes principales obtenues par Méthode de Composition des Contraintes

82 Partie III
A titre de comparaison, nous allons envisager à présent un mode de calcul différent pour
la même laize. La méthode consiste à diviser le domaine par un procédé de Triangulation
Simple (TS) tel que celui présenté au chapitre II-1-2-2. Les données géométriques relatives
aux noeuds internes ne sont alors plus prises en compte par le concepteur. Le maillage
effectué définit une configuration ΩTSL ne comportant plus que 20 éléments (figure III-8).
Nous supposerons que la spécification σ σ σlocm RdF
L L= 0 0 0 est toujours respectée.
Fig. III-8 Triangulation Simple du pseudo PH
Fig. III-9 Laize TS
La laize plane associée à ΩTSL
est calculée par la méthode de Composition des
Contraintes. Le processus converge rapidement vers une erreur nulle, il est arrêté au bout de
quatre itérations avec ∆σ∗=
=TSL(p )4
0 06. % ; la forme obtenue Ω ΩTS TS( )0 4
=*
est représentée
figure III-9. L'idée consiste à remailler ce domaine plan en 40 éléments triangulaires par
addition de noeuds internes sans modifier la géométrie du contour. On construit ainsi une
configuration de départ Ωmod( )* 1
; il est alors possible de calculer les contraintes engendrées par
le passage de celle-ci vers le domaine réel ΩL . Nous obtenons un taux d'erreur initiale élevé
car ∆σ∗ =modL ( )1
26 62. % . Les valeurs des contraintes principales induites sont les suivantes :
200
210
220
230
240
250
260
270
280
290
300
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
Eléments
σ1
σ2
Contr
ainte
s pri
nci
pal
es (
daN
/m)
Tabl. III-2 Pseudo PH : Contraintes principales obtenues par décomposition selon une simple triangulation

Découpe de Laizes des MTA 83
Cette expérience appelle plusieurs commentaires.
Nous remarquons que la non prise en considération de la géométrie totale du domaine réalisée
à l'occasion du maillage par simple triangulation conduit à des erreurs beaucoup plus
importantes. Ce résultat ne constitue cependant pas une surprise en soi.
La numérotation des éléments triangulaires a été effectuée de la gauche vers la droite (axe rX )
et du bas vers le haut (axe rY ). Les numéros de rang plus élevé sont par conséquent attribués
aux éléments proches du point de hauteur maximale. Une lecture plus détaillée du graphe III-2
nous permet ainsi d'observer que l'écart entre les contraintes principales augmente
significativement selon la position de l'élément. Plus ils sont éloignés du point origine
(numéros croissants), plus cet écart s'accroit. On peut apporter une ébauche de réponse en
remarquant que ces éléments sont également ceux qui subissent les taux de déformation les
plus élevés. Cela semble se traduire par l'apparition de termes de cisaillement et donc de
différences entre σ1m et σ2
m .
Il faut néanmoins tempérer le propos en signalant que de multiples possibilités sont
envisageables lors du remaillage du domaine plan ΩTS0 (positions attribuées aux noeuds
internes).
Nous insistons tout de même sur la cohérence et la bonne adéquation des résultats obtenus par
la méthode de Composition des Contraintes. Cet aspect doit être confirmé à l'occasion d'autres
applications.
Fig. III-10 Laize sur chapeau chinois
- Chapeau chinois -
L'exemple suivant se propose de
déterminer une laize ΩL située sur une forme
minimale de type Chapeau chinois (figure III-
10). Cette surface est calculée entre deux
cercles parallèles de diamètres 20m et 4m
éloignés d'une hauteur de 4m.
La laize est disposée comme indiqué figure III-11a, les
traits forts désignant les axes rX et
rY .
Le procédé converge en neufs itérations avec un taux
d'erreur initiale ∆σ∗ =L( )9 10 48. % .
La laize obtenue est représentée figure III-11b.
rX
rY
Fig. III-11a Disposition de projection
Fig. III-11b Laize MCC

84 Partie III
rX
rY
Fig. III-12a Triangulation simple de la laize
Un second calcul réalisé en considérant un maillage
ΩTSL du domaine par simple triangulation détermine une
laize plane en cinq itérations où ∆σ∗=
=TSL(p )5
0 09. % . Fig. III-12b Laize TS
Si cette configuration (figure III-12b) est remaillée en tenant compte de noeuds internes, on
définit de façon analogue à l'exemple précédent une géométrie Ωmod( )* 1
alors caractérisée par un
taux d'erreur initiale ∆σ∗ =modL ( )1
45 20. % .
Les remarques auparavant formulées s'appliquent toujours dans le cas présent.
On peut toutefois s'interroger sur la valeur de l'erreur obtenue (10.48 %); cela revient à
définir plus précisément le seuil d'acceptabilité ∆σ∗L max .
Force est de constater que cette donnée relève en majeure partie de l'expérience des
concepteurs, concept délicat à appréhender dans le contexte de travaux de thèse
essentiellement théoriques. Nous souhaitons cependant ne pas éluder la question et avancer,
sous réserve d'analyses et discussions complémentaires, qu'un tel taux d'erreur est acceptable.
Si tel n'était pas le cas, cette entreprise a le faible mérite d'ouvrir le débat.
Un autre commentaire s'impose à ce niveau de l'étude.
Cette application a été en fait l'occasion de préciser quelques éléments d'ordre numérique.
Nous avons en effet constaté un problème de divergence du procédé lorsque la résolution des
équations (III-17) se référait à la méthode des Inverses Généralisés (voir annexe H).
L'utilisation du processus par factorisation de Householder s'est avérée plus appropriée aux
calculs requis. Il a cependant fallu envisager la décomposition des matrices [ ] [ ] [ ]A Q Rσ *=
par permutations de lignes et de colonnes, technique permettant d'augmenter la stabilité du
procédé dans le cadre d'un mauvais conditionnement de [ ]Aσ *.
Nous allons maintenant présenter un exemple de nature différente permettant d'évaluer
les possibilités de la méthode lorsque des difficultés apparaissent.

Découpe de Laizes des MTA 85
Fig. III-13 Laize avec G>0
- Laize à courbure totale positive -
La forme minimale considérée s'inspire de
l'application présentée en partie II (page 52) où une
géométrie à courbure totale G positive est déterminée
par prise en compte de termes de pression à l'intérieur du
système (structure gonflable).
Dans l'exemple envisagé ici, le rayon de courbure est
sensiblement constant sur toute la surface et égal à
environ 8m. Une laize ΩL est disposée sur le domaine
selon la représentation ci-contre (figure III-13).
rX
rY
Fig. III-14a Mise en place pour projection
La méthode de Composition des Contraintes atteint un seuil de
convergence à partir de huit itérations; le taux d'erreur initiale
est alors ∆σ∗ =L( )8 32 09. % (figure III-14b).
Fig. III-14b Laize MCC
La première remarque venant à l'esprit se rapporte au niveau élevé de courbure totale
préconisé qui, mis en parallèle avec les dimensions de la laize, ne peut être qu'à l'origine de
fortes distorsions lorsque celle-ci est projetée sur une surface plane.
Nous sommes néanmoins dans l'obligation de reconnaître que le procédé révèle ses limites
dans le cas présent. La situation n'est pas pour autant figée et plusieurs pistes de réflexion se
présentent.
Il est tout d'abord certain que la minimisation des écarts de contraintes recherchée est
fondée sur des considérations établies au sens de la norme euclidienne (méthodes de Moindres
Carrés). Rien ne suppose que cette attitude soit totalement fondée, on pourrait presque
supposer le contraire. D'autres normes vectorielles sont par conséquent à envisager.
De plus, les procédés de Moindres Carrés utilisés identifient, dans le cas de solutions
minimisantes multiples, celle de norme minimale. Là aussi, on ne peut certifier qu'il s'agit de
la réponse la mieux appropriée à notre problème.
En guise de conclusion (temporaire), nous insistons sur les performances potentielles de la
méthode proposée tout en gardant à l'esprit les développements ultérieurs à prévoir.
86 Partie III
III -2 Mise en Prétension des Membranes Textiles Architecturales
Le chapitre précédent nous a permis de mettre en évidence une méthode de Découpe de
Laizes et de l'illustrer au travers de quelques applications.
Partant d'une laize tridimensionnelle ΩL dont les caractéristiques (géométrie et état de
prétension) ont été précisées à l'issue d'un procédé de Recherche de Forme, nous avons ainsi
pu déterminer un domaine plan Ω0 qui répond au mieux des exigences théoriques
considérées.
L'objectif consiste à présent à compléter la démarche en envisageant une cinématique
inverse, c'est à dire le passage de Ω0 vers une configuration tendue en imposant des
déplacements à ses conditions aux limites (noeuds frontières). Ce processus de mise en
tension permet d'obtenir un domaine ΩP qui devra être en adéquation avec ΩL , ceci tout
autant au niveau de sa forme (équivalence géométrique) que s'agissant de son état de
prétension (équivalence sthénique).
Si une telle correspondance est vérifiée, nous pourrons en conclure sur la bonne adaptabilité
du domaine plan Ω0 dans le cas du problème considéré.
Découpe de laize et mise en prétension constituent ainsi un mouvement "d'aller-retour"; il
témoignera de la pertinence de la méthode de mise à plat utilisée.
Après avoir précisé les modélisations mécanique et numérique liées au processus de
déploiement, nous illustrerons le propos selon le support fourni par les exemples
précédemment envisagés.
III-2-1 Modélisation de la Mise en Prétension
Nous avons défini dans le cadre de l'annexe A l'incrément de la première variation de
l'énergie potentielle totale δWt 02 1− d'une structure lorsqu'un incrément des déplacements
nodaux dm
1
2 relie des configurations Ω1 et Ω2 supposées très proches (figure III-15). En
formulation lagrangienne totale (FLT) et par rapport à une configuration de référence Ω0 il
vient :
[ ] [ ] δ δ δW d K d d k dt Tm
Tm m
el0
2 1
0 0
2
12
0 0
2
1
2− = =∑ (III-23)
Les matrices de rigidité tangente élémentaires [ ]kTm
0
2 se décomposent selon (B-40) :
[ ] [ ] [ ] [ ]k k k kTm
Lm
NLm m
0
2
0 0
2
0
2= + + σ (III-24)
Si nous supposons que la configuration Ω0 est en équilibre et l'on souhaite après correction
du vecteur généralisé des déplacements nodaux par d1
2 que le domaine Ω2 soit également
en équilibre, ceci implique (théorème des Travaux Virtuels) :
δ δW Wt t01
02
0= = (III-25)

Mise en Prétension des MTA 87
Le caractère non linéaire de ce problème se traduit généralement par l'impossibilité de
déterminer une solution telle que la relation δWt 02 1 0− = soit satisfaite. Il sera donc nécessaire
de recourir à un procédé itératif pour trouver la configuration d'équilibre Ω2 ; on procédera
dans le cadre de cette étude par utilisation de la méthode de Newton-Raphson (NR).
Le domaine de référence considéré est celui associé à la laize plane Ω0 déterminée
selon un procédé de Découpe de Laize (Méthode de Composition des Contraintes dans le cas
présent). Nous allons mettre celle-ci en état de prétension en imposant des déplacements à ses
noeuds frontières jusqu'à ce qu'ils coïncident parfaitement avec ceux de la laize théorique ΩL
calculée par Recherche de Forme.
Les vecteurs généralisés des déplacements nodaux d0
sont décomposés en une partie
relative aux noeuds frontières df 0 (termes imposés) et en un second membre associé aux
noeuds libres du domaine dl 0 (noeuds internes); soit la relation :
d d d0 0 0
= +f l (III-26)
rX
rY
rZ
Ω0
ΩP
Ωp−1
Ωp
df 0
P
Ω1Ω2
Fig. III-15 Mise en prétension de la laize Ω0
Afin d'assurer la proximité des configurations d'équilibre calculées, on va de façon
usuelle procéder par "pas" successifs de déplacements imposés. Il y aura au total P "pas"
repérés "p".
On exprime alors le vecteur déplacement généralisé des noeuds frontières entre Ω0 et ΩL :
df fL
f0
0P= −X X (III-27)
La configuration d'équilibre déterminée au pas p sera notée Ωp ; ce domaine correspond à un
déplacement imposé d dfp
p f0 0= λ
P.

88 Partie III
Entre deux pas consécutifs p-1 et p, nous imposerons un incrément ∆df p 1
p
− selon le facteur
de déplacement ∆λp dans la direction de df 0
P :
∆ ∆d df p 1
pp f−
= λ0
P avec λ λp
p
==
∑∆ ii 1
(III-28)
En final, il doit être vérifié que d df f p 1
p
p0
1
PP
=−
=
∑ ∆ (c'est à dire ∆λpp=
∑ =1
1P
).
Selon la décomposition (III-26), nous avons au pas p :
d d d d di
i
ii
i
i0 0 0
1 1
pf
p pf 1
p
1
p
= + = +−
=−
=
∑ ∑l l∆ ∆ (III-29)
Si le vecteur dfp
0 est connu, il est par contre nécessaire de procéder à plusieurs
itérations (repérées j) pour déterminer ∆dl p 1
p
− et ainsi dl 0
p. Elles définissent des
domaines intermédiaires notés Ωp j .
Chaque itération permet d'effectuer une correction des déplacements δdj
l p associés aux
noeuds libres. On réactualise la somme de ces incréments à l'itération j par :
~ ~∆ ∆d d d
j j jl l l
p p p= +
−1δ (III-30)
Lorsque la convergence est assurée (domaine Ωp j en équilibre), nous posons alors :
∆ ∆d dj
l lp 1
p
p−=
~ (III-31)
La détermination du vecteur δdj
l p repose sur le raisonnement suivant.
On se place au pas p et à l'itération j où les équations d'équilibre ne sont pas vérifiées. Cela
signifie que le vecteur résidu généralisé est différent de zéro, soit Rj
l 0
10
p −≠ .
Il faut que le déplacement δdj
l p soit tel que R
jl 0
0p
= .
Entre ces deux itérations, la variation du vecteur résidu peut s'écrire :
R RR
dd
j j
j
jl l
l
l
l0 0
1
0
1
p p
p
p= +
−−
∂
∂δ (III-32)
Par définition de la matrice généralisée de rigidité tangente (B-22) nous avons ainsi:
[ ] K d RTj j j
l l l0
1
0
1p
p
p− −=δ (III-33)
Cette relation permet de calculer l'incrément cherché δdj
l p.

Mise en Prétension des MTA 89
En l'absence de forces extérieures, le vecteur résidu correspond ici au vecteur des efforts
internes; soit pour chaque élément Rm j m j
l l0
1
0
1p pfi
− −= − .
Il est déterminé en considérant la matrice généralisée de caractérisation des efforts internes
[ ]Ψint l 0
1p j− définie en annexe B (B-12).
Dans la situation présente, on écrit :
[ ]
R F d d d
d d d
j jj
j j
l l l
l l l
0
1
0 0
1 1
0
1
0
1
0 0
1 1
pf
p p
p
p
pf
p p
p
( )
( )
− − − −
− − −
= − + +
= − + +
int
int
~
~
∆
∆Ψ
(III-34)
Remarque : Il n'est parfois pas nécessaire de recalculer la matrice tangente [ ]KTj
l 0
1p − à
chaque itération d'un même pas. On peut par exemple la déterminer une seule et unique fois
en début du pas d'incrémentation et considérer qu'elle varie peu ensuite; cela revient à
considérer que [ ] [ ]K KTj
Tl l0
1
0
1p p−= quelle que soit la valeur de j (méthode de Newton-
Raphson modifiée ou NRM). Cette technique peut se traduire par un gain notable au niveau
des temps de calcul et n'affecte pas la convergence vers la solution sous réserve d'effectuer des
pas d'incrémentation modérés.
Lorsque la convergence est atteinte au dernier pas, nous pouvons préciser la géométrie
de la laize ΩP ainsi mise en tension en considérant les déplacements :
d d d0 0 0
P P P= +f l (III-35)
Il est alors possible de les comparer avec ceux correspondants au passage du domaine de
départ Ω0 vers la laize théorique ΩL :
dl l l0
0L L= −X X (III-36)
On définit ainsi un taux d'erreur géométrique ∆gLP lié aux positions des noeuds libres
(internes) du domaine :
∆g
d d
dL
L
L
P
P
=−l l
l
0 0
0
(III-37)
L'état de prétension de la configuration ΩP peut également être déterminé en calculant les
tenseurs élémentaires σlocm
P (il suffit de reprendre les procédures explicitées au chapitre III-
1-2-2); il permet de préciser un taux d'erreur sthénique ∆σLP :
∆σL
RdF
L
RdF
L
P P=
−σ σ
σ
loc loc
loc
(III-38)

90 Partie III
Ces deux taux indiquent si les considérations d'équivalence géométrique et d'équivalence
sthénique entre la configuration théorique ΩL et le domaine mis en prétension ΩP à partir de
Ω0 sont respectées.
III-2-2 Applications
Les exemples traités s'inscrivent dans la continuité de deux applications présentées lors
de l'étude de la Découpe de Laizes par la méthode de Composition des Contraintes.
Les caractéristiques du matériau sont identiques à celles auparavant retenues (c'est à dire
Emc = 23000 daN / m , Emt = 24 900 daN / m , νct = 0 097. , ΩLνtc = 0 090. ) et l'état de
prétension du domaine ΩL correspond à σ σ σlocm RdF
L L= 0 0 0 où σ0 250= daN / m .
La direction de la chaîne du tissu est toujours orientée selon l'axe rX et la trame sur l'axe
rY .
Remarques :
- Les configurations de départ Ω0 étant planes, la matrice généralisée de rigidité tangente
calculée au premier pas et à la première itération [ ]KTl 0
1 0 présente des singularités (semi
définie positive donc non inversible). Afin de pallier cette situation, nous considérerons que
~∆ ∆d dl l
1
0
1 0= λ
L. Pour les autres étapes, on aura par contre
~∆dl
p>=
1
00 .
- On estime que l'équilibre du domaine est vérifié au pas p et à l'itération j si pour tous les
noeuds libres fi daNp
lm j
00 01≤ . .
Fig. III-16 Pseudo PH : mise en
prétension
- Pseudo PH -
La figure III-16 représente la laize tridimensionelle
ΩL (surface minimale en forme de pseudo PH) et le
domaine plan associé Ω0 déterminé par la Méthode de
Composition de Contraintes.
Sa mise en prétension s'effectue en dix pas
d'incrémentation ( P = 10 ).
Nous obtenons ainsi une configuration ( )Ω ΩP =10
possèdant une forme très proche de celle de ΩL , il est en
effet vérifié ( )
∆g L10
0 21= . % .
La différence entre les contraintes théoriques et
déterminées se traduit par ( )
∆σ L10
3 81= . % .
On remarque de plus que la distribution des contraintes principales sur ΩP est similaire à
celle exposée dans le tableau III-1 (page 81).

Mise en Prétension des MTA 91
Fig. III-17 Chapeau chinois : mise en
prétension
- Chapeau chinois -
La même démarche est à présent appliquée au cas
de la laize ΩL appartenant à la forme minimale de type
Chapeau chinois.
Le déploiement est réalisé en quinze pas d'incrémentation
et l'on aboutit aux valeurs :
( )∆g L
150 92= . % ainsi que
( )∆σ L
1510 47= . % .
Il est possible de formuler différents commentaires à partir de ces deux résultats.
La mise en prétension du domaine plan Ω0 détermine une forme d'équilibre caractérisée par
une géométrie voisine de celle spécifiée par Recherche de Forme. Nous pouvons ainsi
considérer qu'il y a équivalence géométrique entre ces deux configurations; la forme de départ
paraissant alors répondre favorablement au problème posé ( ∆gLP faible).
L'erreur relative entre l'état de prétension recherché et celui obtenu après déploiement est en
corrélation avec le taux d'erreur minimal déterminé lors du processus de mise à plat de la laize
tridimensionnelle. La notion d'équivalence sthénique se trouve de fait liée au critère
d'accceptabilité défini par ∆σ∗L max à cette occasion.
Les taux d'erreur obtenus (supérieur à 10 % pour la seconde application) accentuent en fait la
nécessité d'amender le procédé de Découpe de Laize utilisé selon les directions déjà
envisagées (minimisation selon d'autres normes).
Conclusion de la partie III 93
Conclusion
Etape essentielle de la réalisation des Membranes Textiles Architecturales, l'opération
de Découpe de Laizes doit être menée en respectant le plus fidèlement possible les exigences
du concepteur.
Cette restriction ne fait que traduire l'impossibilité de déterminer une solution exacte pour le
problème posé, les diverses méthodes utilisées se devant alors d'identifier celle qui conduit à
des erreurs minimales.
A cet effet, l'objectif de cette troisième partie était de mettre en avant un procédé de
Découpe de Laizes fondé sur une démarche différente de celles jusqu'alors suggérées.
La Méthode de Composition des Contraintes se propose en effet de mener à bien cette
opération en prenant en considération de façon combinée toutes les données relatives à la
géométrie du domaine ainsi qu'à son état de prétension.
Une fois le cadre théorique mis en place, plusieurs applications viennent illustrer le propos
tout en révélant les possibilités et les limites de la méthode.
Nous mettons ainsi en évidence la cohérence des résultats obtenus lors de l'étude d'exemples
fréquemment rencontrés.
Il apparaît toutefois que de nombreuses améliorations pourraient être apportées à l'occasion
d'une réflexion approfondie menée sur ce thème.
On ne peut cependant aborder la problématique liée à la Découpe de Laizes sans en
considérer une vision plus étendue. La modélisation de la Mise en Prétension s'inscrit dans
une telle logique en autorisant une démarche d'aller-retour entre une configuration recherchée
et une autre déterminée par transformations successives de mise à plat puis de déploiement.
Le cadre de l'étude se situe dans un contexte de grands déplacements et le support théorique
retenu repose sur une modélisation du processus en description lagrangienne totale.
Les exemples traités montrent ainsi la correspondance géométrique existant entre la laize mise
en prétension et la configuration recherchée.
Si l'attention se porte sur les contraintes engendrées au sein du milieu, les résultats obtenus
reflètent toutefois les erreurs rencontrées lors du procédé de Découpe de Laizes.
Cet aspect ne fait qu'appuyer les remarques auparavant formulées et laisse le champ libre à de
futures recherches.

Conclusion générale

Conclusion générale 95
Conclusion générale
Il n'est plus nécessaire de souligner la part grandissante qu'occupent les structures à
base de Membranes Textiles prétendues dans l'Architecture contemporaine. Cet essor met
cependant en relief de nombreux et divers aspects problématiques, les aspirations des
concepteurs révèlent les limites des approches conceptuelles traditionnelles qui se doivent
d'être alors dépassées, voire redéfinies à la lumière de nouvelles considérations.
La Morphologie Structurale nous permet ici de décliner une réponse selon trois modes
principaux : Formes, Forces et Matériaux.
Le premier thème abordé dérive ainsi de l'étude des relations associant les concepts de
Formes et de Forces, analyse regroupée sous le terme générique de Recherche de Forme.
Nous avons tout d'abord mis en évidence l'insuffisance des solutions apportées par une
modélisation linéaire (réseau de câbles) des Membranes Textiles Architecturales et ainsi la
nécessité de recourir à une représentation surfacique de ces systèmes.
La réponse retenue à cet effet constitue la Méthode des Densités de Contraintes
Surfaciques. Fondée sur une formulation alliant les exigences du mécanicien et du
concepteur, elle autorise une gestion efficace de la géométrie et de l'état de prétension du
milieu ainsi déterminé. Les possibilités offertes s'étendent sur plusieurs domaines : calcul de
structures gonflables, prise en compte de câbles de ralingue.
On s'est par ailleurs assuré de la stabilité mécanique des systèmes calculés selon cette
méthode. Ce fut également l'occasion de préciser l'ordre de leurs mécanismes.
Nous avons ensuite porté notre attention sur un type bien particulier de configurations
dites minimales : les réseaux de câbles de longueur minimale et les surfaces d'aire minima.
Deux procédés d'investigation sont mis en avant.
Le premier repose sur l'utilisation des Méthodes de Densités selon un schéma itératif. Des
modifications appropriées des coefficients de densités permettent au processus de converger
vers la configuration recherchée.
Le second procédé se réfère à la minimisation de fonctionnelles selon la méthode du
Gradient Conjugué. Nous proposons à cet égard d'effectuer l'évaluation des directions et
longueurs de descente selon des approches optimisées.
Dans ces deux cas, de nombreux exemples viennent illustrer le propos et soulignent la
cohérence des résultats obtenus.
Néanmoins la porte reste ouverte à de multiples perspectives : amélioration des performances
numériques, définition d'approches combinées.

96 Conclusion générale
Cette partie est par ailleurs l'occasion de proposer une méthodologie de maillage qui permet
de déterminer les caractéristiques géométriques principales des surfaces.
La démarche s'appuie sur la dérivation des fonctions de forme associées aux éléments du
domaine.
La réflexion est élargie à ce stade de l'étude en y intégrant la notion de Matériaux.
Partant d'une configuration déterminée selon un procédé de Recherche de Forme, il
s'agit d'envisager à présent sa réalisation. L'opération mise en jeu à ce niveau répond à
l'appellation de Découpe de Laizes.
L'objectif retenu dans le cadre de ces travaux consiste à proposer une nouvelle méthodologie
à partir d'un support théorique qui associe des étapes jusqu'alors considérées comme
distinctes (développement puis réduction).
La Méthode de Composition des Contraintes apporte à ce titre de nombreux éléments de
réponse; les applications présentées traduisent en effet la pertinence de la formulation utilisée
tout en mettant en relief ses limites et par là-même les futurs développements à envisager.
La modélisation de la Mise en Prétension permet par la suite de compléter le propos
en vérifiant la correspondance des formes de découpe spécifiées avec les exigences du
concepteur. Nous observons à cet égard que les configurations mises en état de prétension ont
une géométrie voisine de celle recherchée. Les considérations relatives aux champs de
prétension confirment les remarques précédemment émises.

ANNEXES

Annexe A 97
Annexe A
Méthode des Densités de Forces
Cette section complète la description de la Méthode des Densités de Forces effectuée au
chapitre I-1-2 (page 11).
A-1 Définition des opérateurs
Considérons une configuration Ω avec C éléments de câble, N noeuds se répartissant en
nl noeuds libres (NL) selon les axes rX ,
rY ,
rZ et nf noeuds totalement fixes (NF).
Cette configuration est en état d'équilibre autocontraint en l'absence de forces extérieures si
l'on vérifie les équations suivantes :
[ ] D X DXl = , [ ] D Y DYl = , [ ] D Z DZl = (A-1)
où Xl , Yl et Zl sont les vecteurs coordonnées des noeuds libres selon rX ,
rY et
rZ .
De plus la matrice [ ]( )ll
nnDX
dite de connection est définie par :
[ ] [ ] [ ] [ ]D C Q CT
= l l l (A-2)
[ ]Cl provient de la décomposition de la matrice de connectivité [ ]C selon :
[ ] [ ] [ ][ ]C C C= l f avec [ ]( )C
C nllX
et [ ]( )C
C nfX f
(A-3)
On a de plus Cij = 0 sauf si il existe un élément de câble i en relation avec le NL j et le noeud
k alors :
Cij = 1 et Cik = −1 (A-4)
On définit aussi la matrice [ ]( )Q
C ClX
des coefficients de densités de force par :
Q ql lii i= et Q i jlij ( )≠ = 0 (A-5)
Il suit la décomposition de [ ]D selon :
D qii kk
i
i
=∑ l pour les éléments ki connectés au NL i
D qij rr
i
i
= −∑ l pour les éléments ri connectés au NL i et au NL j (A-6)
En considérant le vecteur Xf des coordonnées des noeuds fixes selon rX on écrit
( )DX nl X1
d'après :
[ ] [ ] [ ] D C Q C XXT
= − l l f f (A-7)
avec la décomposition :
DXi = 0 sauf D q XXi t ut
i
i
=∑ l f pour les éléments ti reliés avec le NL i et le NF u (A-8)

98 Méthode des Densités de Forces
A-2 Résolution de l'équation [[[[ ]]]] D X DXl ====
La détermination de la position d'équilibre Ω s'effectue par résolution des équations
linéaires (A-1). Il s'agit du principe fondamental de la Méthode des Densités de Forces.
Plusieurs approches sont envisageables : une résolution directe par calcul de la matrice inverse
[ ]D−1
ou une résolution de type itérative.
Dans cette seconde situation, la méthode de Gauss-Seidel appliquée au système [ ] A X B=
suit la procédure :
XB
A
A
AXi
i
ii
ij
iijj i
N
j(p 1) (p)+
=≠
= −∑1
(A-9)
Dans le cas présent on a :
X X D Xi i ijj
j i
n
jl l l
l(p 1) (1) m (p)+
=
≠
= +∑1
(A-10)
où :
XD
D
q X
qi
Xi
ii
t ut
kk
i
i
i
i
l
l
l
(1)
f
= =
∑
∑ et D
q
qij
rr
kk
i
i
i
i
m=
∑
∑
l
l
(A-11)
Soit, à la seconde itération, la coordonnée du NL i selon rX s'écrit :
( )
X
q X
q
q X
qi
t ut
kk
rr
jj j i
n
kk
i
i
i
i
i
i
i
i
l
l
l
l l
l
l
( )
f(1)(( ) )
2 1= +
∑
∑
∑∑
∑
= ≠ (A-12)
Le numérateur du second terme de (A-12) étant forcément égal à q Xrr
ri
i
il l∑(1) , il vient :
X
q X q X
qi
t ut
rr
r
kk
i
i
i
i
i
i
i
l
l l l
l
( )
f(1)
2=
+∑ ∑
∑ (A-13)
En extrapolant la procédure à l'étape p, nous obtenons la relation suivante :
X
q X q X
qi
t ut
rr
r
kk
i
i
i
i
i
i
i
l
l l l
l
(p)
f(p 1)
=
+∑ ∑
∑
−
(A-14)

Annexe B 99
Annexe B
Principes Variationnels en Mécanique des Solides
Discrétisation par Eléments Finis
B-1 Mécanique des solides déformables, généralités
On considère une configuration de référence Ω0 à l'instant t0 (en notant la configuration
d'équilibre d'un solide Ω à l'instant ti selon Ωi ) qui se déforme en Ω1 .
Un élément différentiel de longueur dRr
0 de Ω0 se transforme en dRr
1 dans Ω1 .
On a la relation :
[ ]dR F dRr r
101 0= (B-1)
où [ ]F 01
est le tenseur gradient de transformation entre Ω0 et Ω1 .
On peut dès lors définir les tenseurs de déformations de Green-Lagrange [ ]ε01
et
d'Almansi-Euler [ ]e10
par :
[ ] [ ] [ ] [ ]( )ε01
01
01
3
1
2= −F F Id
T (B-2)
[ ] [ ] [ ] [ ]( )e Id F FT
10
3 10
101
2= − avec [ ] [ ]( )F F
10
01 1
=−
(B-3)
De même, il est possible d'écrire la relation existant entre les tenseurs de contraintes de
Cauchy [ ]σ1
et de Piola-Kirchhoff de seconde espèce [ ]S01
selon :
[ ] [ ]( ) [ ] [ ] [ ]S F F FT
01
01
10
1 10= det σ (B-4)
B-2 Principe des travaux virtuels
Il s'agit de mettre en place la formulation variationnelle associée aux équations
d'équilibre du solide relativement aux configurations Ω0 et Ω1 .
La première variation de l'énergie potentielle totale de la structure δWt01 est égale à la
différence entre la première variation de son énergie de déformation δWd01 (soit le travail
virtuel des efforts internes) et de la première variation du travail des forces extérieures
appliquées à la structure δWe01 (ou encore travail virtuel des forces extérieures). Soit la
relation :
δ δ δWt Wd We01
01
01= − (B-5)
Le principe des travaux virtuels stipule que l'énergie potentielle totale de la structure est
minimale dans sa configuration d'équilibre réelle Ω.

100 Principes Variationnels - Dicrétisation par Eléments Finis
Parmi tous les déplacements cinématiquement admissibles, les déplacements réels rendent Wt
extrémale.
De plus, le principe de l'extremum implique que :
∀ =δ δd Wt 0 (B-6)
B-2-1 Calcul de δWd01 :
La première variation de l'énergie de déformation élémentaire δwde
01 est définie selon
(formulation eulérienne ou lagrangienne) :
δ δ σ δεw e dV S dVde e e
V
e e
V
01
1
0
1
1
0
1
0
1 0
01
= =∫ ∫ (B-7)
Soit après sommation sur tous les éléments de la structure :
δ δ σ δεWd e dV S dVe e
Vel
e e
Vel01
1
0
1
1
0
1
0
1 0
1 0
= =∫∑ ∫∑ (B-8)
B-2-2 Calcul des efforts internes :
On a par définition du vecteur élémentaire des efforts internes fie
0
1 :
δ δw dde e e
01
0 0
1= fi (B-9)
D'après l'expression de la première variation du vecteur des déformations mise en évidence en
annexe D (relation D-27), on peut écrire :
[ ] [ ] δ δw d b b S dVde e
Le T
NLe T
V
e01
0 0 0
1
0
1 0
0
= +∫ ( ) (B-10)
Soit par identification et avec la loi de comportement du matériau précisée en annexe C (C-7):
[ ] [ ] [ ] [ ] [ ] fi ( ) ( )eLe T
NLe T
V
eLe
NLe e
b b E b b d dV0
1
0 0
1
0 0 0
1
0
1 0
0
1
2= + +∫ (B-11)
Cette écriture se simplifie en considérant la matrice élémentaire de caractérisation des efforts
internes [ ]ψ inte
0 en formulation lagrangienne :
[ ] fie e ed
0
1
0
1
0
1= ψ int (B-12)
B-2-3 Calcul de δWe01 :
Selon les différents types de chargements, on écrit en formulation eulérienne :
δ δ δ δυWe u dV u dV ue e
Vel
ese
Vel
epie
iel01
0 1
1
0 1
1
0 11 1
= + +∫∑ ∫∑ ∑∑fe fe fe (B-13)
Annexe B 101
avec feυe , fes
e et fe pie
représentant les vecteurs des forces volumiques, surfaciques et
ponctuelles (forces concentrées aux points matériels i).
On peut transcrire sous la forme réduite :
δ δWe u dDe e
Del01
0 1
1
1
= ∫∑ fe (B-14)
De la même façon, en formulation lagrangienne :
δ δWe u dDe e
Del01
0 0
0
0
= ∫∑ fe (B-15)
B-2-4 Calcul de la première variation de l'énergie potentielle totale δWt01 :
D'après (B-5) et les équations (B-8) et (B-14) on obtient :
δ δ σ δWt e dV u dDe e
Vel
e e
Del01
1
0
1
1
0 1
1
1 1
= −∫∑ ∫∑ fe (B-16-a)
δ δε δWt S dV u dDe e
Vel
e e
Del01
0
1
0
1 0
0 0
0
0 0
= −∫∑ ∫∑ fe (B-16-b)
B-3 Formulation incrémentale et matrice de rigidité tangente
En considérant l'écriture :
( )δ δWt d F Fext01
0 0 0
1= − int (B-17)
D'après (B-6) l'équation d'équilibre devient :
∀ =δ δd Wt0 0
1 0 (B-18)
Soit en définissant le vecteur résidu des efforts généralisés de la structure :
R F Fext01
0 0
10= − =int (B-19)
La matrice tangente élémentaire [ ]kTe
relie un incrément du vecteur des déplacements
nodaux à l'incrément correspondant du vecteur résidu.
En utilisant un déplacement différentiel élémentaire δde
0 on écrit :
[ ] ∀ = −δ δ δd k d Re
Te e e
0 0
1
0 0
1 (B-20)
avec la relation :
δ δ δRe e e
0
1
0 0
1= −fe fi (B-21)

102 Principes Variationnels - Dicrétisation par Eléments Finis
Soit encore l'expression :
[ ]
kR
dTe
e
e0
10
1
0
= −∂
∂ (B-22)
En différentiant l'expression de la première variation de l'énergie potentielle élémentaire
(B-5) il vient en considérant δ2
00d
e = par définition d'un déplacement différentiel
δde
0 :
δ δ δ δ δ δ δ20
20
20
0 0 0 0w w w d dt
ede
ee e e e e= − = −fi fe (B-23)
D'où la relation :
[ ] δ δ δ20
0 0 0w d k dt
e eTe e= (B-24)
Considérons à présent un incrément de déplacement u12
en un point d'un élément fini
entre les configurations Ω1 et Ω2 supposées très proches et dû à un incrément des
déplacements nodaux de
1
2. A cet incrément est associé un incrément de la première
variation de l'énergie potentielle totale δWt 02 1− si l'on se réfère à la configuration Ω0 . Cet
incrément se défini selon :
δ δ δW W Wt t t02 1
02
01− = − (B-25)
Si Ω1 et Ω2 sont très proches, cet incrément de la première variation de δWt0 égal à δWt 02 1−
peut être comparé à sa deuxième variation mise en place en (B-24) :
[ ] [ ] δ δ δW d K d d k dt Te
Te e
el0
2 10 0
2
12
0 0
2
1
2− = =∑ (B-26)
En formulation lagrangienne totale (FLT) référée à Ω0 on obtient :
δ δε δε δW S S dV u dDte e e e
Vel
e e
Del0
2 1
0
2
0
2 1
0
2 1
0
1 0
0 0
2 1 0
0 0
− − − −= + −∫∑ ∫∑( ) fe (B-27)
Avec la relation (D-27) et selon :
[ ] [ ] δε δε δε δe e eLe
NLe e
b b d0
2
0
2
0
2 1
0 0
2
0= + = +
−( ) (B-28)
il s'ensuit que :
[ ] δε δε δeNLe
NLe e
b d0
2 1
0
2 1
0
2 1
0
− − −= = (B-29)
De plus, en utilisant les propriétés de forme quadratiques de chacune des composantes de
εNLe
(cf D-22) :
[ ] [ ] εeLe
NLe e
b b d0
2 1
0 0
2
1
2−= +( ) (B-30)

Annexe B 103
D'après la loi de comportement retenue (C-7) il vient :
[ ] S Ee e e
0
2 1
0 0
2 1− −= ε (B-31)
Ceci conduit à l'expression (B-32) :
[ ] [ ] [ ] [ ] [ ] δε δe e
Vel
eLe T
NLe T e
Le
NLe e
Vel
S dV d b b E b b d dV0
2
0
2 1 0
0 0 0
2
0 0 0
2
1
2 0
0 0
−
∫∑ ∫∑= + +
( )
Si l'on se réfère à (D-23), la ieme composante de δεe
0
2 1− est égale à :
[ ] ( )δε δei
eqe i e
d b d0
2 1
0 0 1
2−= , (B-33)
D'où la relation (B-34) :
[ ] [ ] [ ][ ] [ ] δε δ ξ ξ ξ ξ ξe e
Vel
e ei
i
eT
eT
i e e e
Vel
S dV d S b b F b b dV d0
2 1
0
1 0
0 0
1
1
6
0 0 0 0
0
1
2
0 0
−
=∫∑ ∑∫∑= ( ) ( )
Soit en écriture simplifiée :
[ ] [ ] [ ] [ ] [ ] δε δ ξ ξ ξ ξ ξe e
Vel
e eT
eT
Se e e e
Vel
S dV d b b F b b dV d0
2 1
0
1 0
0 0 0 0
1
0 0
0
1
2
0 0
−
∫∑ ∫∑= (B-35)
avec :
[ ] [ ]F S FSe e
ii
iξ ξ
0
1
0
1
1
6
==∑( ) (B-36)
Le second terme de l'équation (B-27) correspond à la variation de l'énergie potentielle
virtuelle totale lorsque le chargement varie au cours de la déformation (cas de forces suiveuses
par exemple). Dans le cadre de cette étude un tel comportement ne sera pas envisagé et le
terme correspondant sera ainsi considéré comme nul.
En identifiant (B-26) avec les autres membres de (B-27) et d'après les relations (B-32) et
(B-35) nous définissons les matrices élémentaires de rigidité suivantes :
[ ] [ ] [ ] [ ]k b E b dVLe
Le T
V
eLe
0 0 0 0
0
0
= ∫ (B-37)
dite matrice de rigidité linéaire.
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]k b E b b dV b E b dVNLe
NLe T
V
eLe
NLe
Le T
V
eNLe
0
2
0
2
0 0 0
2 0
0 0 0
2 0
0 0
= + +∫ ∫( ) (B-38)
appelée matrice de rigidité non linéaire (ou encore des déplacements initiaux).
[ ] [ ] [ ] [ ] [ ] [ ]k b q F q b dVe e T e T
Se e e
Velσ ξ ξ ξ ξ ξ0
2
0 0 0
1
0 0
0
0
= ∫∑ (B-39)
dite matrice de rigidité géométrique.

104 Principes Variationnels - Dicrétisation par Eléments Finis
On remarque que [ ]keσ
0
2 ne dépend que des configurations Ω0 et Ω1 en FLT; cela traduit le
fait que les contraintes ne s'expriment pas dans les mêmes référentiels entre ces deux
systèmes. Cette matrice permet en fait de corriger la matrice de rigidité tangente [ ]kTe
0
2 en
référant les contraites à la configuration Ω1 sans avoir pour autant réactualisé la géométrie
entre Ω1 et Ω0 ; on pourra ainsi noter indifférement [ ]keσ
0
1 ou [ ]k
eσ
0
2.
La matrice de rigidité tangente élémentaire s'écrit en final :
[ ] [ ] [ ] [ ]k k k kTe
Le
NLe e
0
2
0 0
2
0
2= + + σ (B-40)
Remarque :
Des considérations plus détaillées sont exposées dans les références suivantes :
[BAT 82], [BAT 92], [CIA 78], [DRO 96], [GER 86], [IMB 84], [ZIE 79].

Annexe C 105
Annexe C
Lois de comportement du matériau textile
C-1 Contexte de l'étude
Dans le cadre de l'hypothèse H1 (petites déformations élastiques), le théorème de
décomposition polaire du tenseur gradient de transformation [ ]F01
entre les configurations Ω0
et Ω1 permet d'écrire :
[ ] [ ] [ ] [ ]F R U R01
01
01
01
= ≈ (C-1)
[ ]R 01
est le tenseur orthogonal de rotation pure avec dans le cas général de petites
déformations :
[ ] [ ]U Id01
3≈ et [ ]( )det F01
1≈ (C-2)
D'après (B-4) on peut ainsi préciser :
[ ] [ ] [ ] [ ]S R RT
01
01
1 01
= σ (C-3)
Cela signifie que le tenseur PK2 [ ]S01
mesuré dans Ω1 relativement à Ω
0 est identique
au tenseur de Cauchy mesuré dans Ω1 et exprimé dans un repère correspondant à la
configuration Ω1 (repère corotationnel), soit :
[ ] [ ]S loc01
11= σ ,Ω (C-4)
Cette égalité, en regard de l'hypothèse H2 de membrane permet ainsi d'obtenir les mêmes
relations pour les contraintes PK2 que pour les contraintes de Cauchy :
S Slocm
locm
z x<< et S Slocm
locm
z y<< (C-5-a)
S Slocm
locm
xz xy<< et S Slocm
locm
yz xy<< (C-5-b)
C-2 Le matériau toile textile
Le matériau employé en architecture textile est un composite multicouche orthotrope
réalisé d'un tissé orthogonal de fibres synthétiques (fibre de verre, polyester, nylon ...) et d'une
enduction plastique (PVC, PTFE ...). Les directions de la trame et de la chaîne du tissu
définissent un repère orthogonal local dit d'orthotropie.
Les essais réalisés sur différents matériaux ont mené aux conclusions suivantes [TRO
92] :
- Le premier cycle de chargement/déchargement entraîne une déformation résiduelle
permanente de la toile; ceci est appelé phénomène d'embuvage.
- Les cycles suivants décrivent un comportement de type hystérétique stable pouvant
s'interpréter en première approximation comme un comportement pseudo élastique linéaire.

106 Lois de comportement
- Les essais biaxiaux mettent en évidence les différences de comportement de la toile selon le
rapport existant entre sa tension en trame et sa tension en chaîne.
- Sur un moyen terme, le matériau présente des phénomènes de relaxation des contraintes. Sur
un plus long terme, ses caractéristiques mécaniques sont sensibles au vieillissement.
La deuxième remarque est à la base de l'hypothèse H3 de solide élastique linéaire.
On montre qu'il est possible dans le cadre de l'hypothèse H1 de généraliser la loi de Hooke en
une loi linéaire générale reliant les tenseurs [ ]S 01
et [ ]ε 01
.
Elle fait intervenir le tenseur d'élasticité [ ]E et, en l'absence de contraintes et déformations
initiales :
S Eij ijkl kl01
0 01
= ε (C-6)
Soit, pour un élément, sous forme matricielle en formulation lagrangienne par rapport à Ω0 :
[ ] S Ee e e
0
1
0 0
1= ε (C-7)
C-3 Mise en place des opérateurs matriciels
Nous écrivons la relation (C-7) dans le repère d'orthotropie trame-chaîne d'un élément
de membrane; d'après les relations (C-5) et s'agissant ainsi d'un repère local, il vient [GAY
91]:
[ ] S Eortm
ortm
ortm
0
1
0 0
1= ε (C-8)
avec les quantités :
S
S
S
S
ortm
tm
cm
ctm
0
1
0
1
=
, ε
ε
ε
ε
ortm
tm
cm
ctm
0
1
0
1
=
et [ ]E
E E
E E
G
ortm
mt
tc ct
tc mt
tc ct
ct mc
tc ct
mc
tc ct
mct
0
0
1 10
1 10
0 0
=
− −
− −
υ υ
υ
υ υ
υ
υ υ υ υ (C-9)
[ ]Eortm
0 est symétrique si :
υ υtc mt ct mcE E= (C-10)
Le repère local de l'élément est calculé d'après sa base covariante associée (cf D-3) par :
r
r
rxm =g
g
01
01
, v rzm = g03 et
r r vy x zm m m= ∧ (C-11)

Annexe C 107
On peut écrire la matrice d'élasticité [ ]Elocm
0 par la relation :
[ ] [ ] [ ] [ ]E T E Tlocm m T
ortm m
0 0 0 0= ε ε,ort ,ort (C-12)
où [ ]Tm
ε,ort0
désigne la matrice de passage des déformations du repère d'orthotropie au repère
local :
[ ] ε εεortm m
locm
T0
1
0 0
1= ,ort (C-13)
[ ]T
C S CS
S C CS
CS CS C S
mε,ort
0
2 2
2 2
2 2
02 2
=
−
− −
, C
S
ortm
ortm
=
=
cos
sin
θ
θ (C-14)
avec θortm angle orienté direct entre la direction de la trame de l'élément et
rxm .
De plus, on peut exprimer [ ]Em
0 en repère global par :
[ ] [ ] [ ] [ ]E T E Tm m T
locm m
0 0 0 0= ε ε (C-15)
[ ]Tm
ε0
désignant la matrice de passage des déformations du repère global au repère local :
[ ] ε εεlocm m m
T0
1
0 0
1= (C-16)
[ ]T
a a a a a a a a a
b b b b b b b b b
a b a b a b a b a b a b a b a b a b
mε
0
12
22
32
1 2 2 3 1 3
12
22
32
1 2 2 3 1 3
1 1 2 2 3 3 1 2 2 1 2 3 3 2 1 3 3 10
2 2 2
=
+ + +
(C-17)
avec rxm 0
= a a a1 2 3 et rym = b b b1 2 3 0
exprimés dans le repère global.
Nous définissons la matrice de passage des contraintes du repère global au repère local par :
[ ] S T Slocm m m
0
1
0 0
1= σ et [ ] σ σσloc
m m mT
0 0 0= (C-18)
ainsi que :
[ ] σ σσ
m mlocm
T0 0 0
= ' (C-19)
avec la relation :
[ ] [ ]T Tm m T
σ ε' 0 0= (C-20)
De plus, si σlocm
0 est isotrope, on écrit :
σ σσ
m
iso
m mT
0 00=
' (C-21)

108 Lois de comportement
C-4 Cas des éléments de câble
Dans le cas d'un élément de câble, on considère que seuls σlocc
x et Slocc
x sont non nuls
ainsi que εlocc
x , il suit :
[ ]E Elocc
c0
= (C22)
[ ]T a a a a a a a a ac
ε0
12
22
32
1 2 2 3 1 30
= (C23)
avec r
r
rxc = =g
ga a a01
011 2 3 0
en repère global. (C24)

Annexe D 109
Annexe D
Interpolation cinématique et des déformations
Cette partie vise à mettre en place les opérateurs nécessaires [ ]bLe et [ ]bNL
e .
Nous traiterons plus particulièrement le cas des éléments de membranes T3 (e=m); les
résultats concernant les éléments de câble (e=c) seront également donnés.
D-1 Interpolation cinématique
Si l'on considère un déplacement des noeuds d'un élément dm
0
1 relativement à une
configuration Ω0 , le champ de déplacement um
0
1 sera obtenu en tout point de cet élément;
il est relié à dm
0
1 par l'intermédiaire de la matrice des fonctions de forme [ ]N
m
0 par :
[ ] u N dm m m
0
1
0 0
1= (D-1)
La matrice [ ]Nm
0 dépend des fonctions de forme sur l'élément T3 définies selon les
coordonnées intrinsèques ξ et η :
[ ] [ ] [ ] [ ][ ]N N Id N Id N Idm m m m
01 3 2 3 3 3
0= (D-2-a)
avec
N
N
N
m
m
m
1
2
3
1= − −
=
=
ξ η
ξ
η
(D-2-b)
En considérant le vecteur rR X Y Z0 0
= , on peut définir la matrice jacobienne [ ]Jm
0
associée à l'élément en calculant sa base covariante rg i0 selon :
r
r
gRo
01 =∂
∂ξ ,
rr
gRo
02 =∂
∂η et
rr r
r rgg g
g g03
01 02
01 02
=∧
∧ (D-3)
[ ]J
g
g
g
m
0
01
02
03 0
=
r
r
r (D-4)
L'inverse de la matrice jacobienne est relié à la base contravariante rg i
0 associée à l'élément :
[ ] [ ] [ ]j J g g gm m
0 0
1
01
02
03
0= =
− r r r (D-5)

110 Interpolation cinématique et des déformations
D-2 Interpolation des déformations linéaires (matrice [ ]bLm
0)
La matrice d'interpolation des déformations linéaires [ ]bLm
0 est définie par :
[ ] εLm
Lm m
b d0
1
0 0
1= (D-6)
εLm
0
1 est le vecteur colonne des déformations linéaires en repère global ( )
r r rX Y Z :
ε
ε
ε
ε
ε
ε
ε
Lm
X
Y
Z
XY
XY
XZ
X
Y
Z
Y X
Z Y
X Z
u
v
w
u v
v w
w u
0
1
0
1
0
1
2
2
2
=
=+
+
+
,
,
,
, ,
, ,
, ,
(D-7)
Avec dm
0
1 vecteur des déplacements nodaux entre Ω0 et Ω1 .
d d d d d d d d d d d d dm
X Y Z X Y Z X Y Z0
1
1 2 30
1
1 1 1 2 2 2 3 3 30
1= =
r r r (D-8)
On peut écrire le vecteur εξm
0
1 des dérivées partielles par rapport aux coordonnées
intrinsèques du champ de déplacement um
0
1 puis :
[ ] ε εξ ξLm m m
a0
1
0 0
1= (D-9)
où les termes de [ ]amξ
0 dépendent des valeurs de [ ]j
m
0 :
[ ]a
j j
j j
j j
j j j j
j j j j
j j j j
mξ
0
11 12
21 22
31 32
21 22 11 12
31 32 21 22
31 32 11 12 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0
0 0
0 0
=
(D-10)
De plus, d'après l'interpolation cinématique choisie on a :
[ ] εξ ξm m m
b d0
1
0 0
1= (D-11)

Annexe D 111
avec [ ]bmξ
0 de la forme :
[ ]b
N
N
N
N
N
N
N N N Nmξ
ξ
η
ξ
η
ξ
η
0
1
1
1
1
1
1
1 2 1 3
0
0 0
0 0
0 0
0 0
0 0
0 0
= ↔ ↔
,
,
,
,
,
,
Idem Idem (D-12)
Il suit donc :
[ ] [ ] [ ]b a bLm m m
0 0 0= ξ ξ (D-13)
D-3 Interpolation des déformations non linéaires (matrice [ ]bNLm
0
1)
La matrice d'interpolation des déformations non linéaires est définie selon :
[ ] εNLm
NLm m
b d0
1
0
1
0
11
2= (D-14)
εNLm
0
1 est le vecteur colonne des déformations non linéaires en repère global :
( )
( )
( )εNLm
X X X
Y Y Y
Z Z Z
X Y X Y X Y
Z Z Y Z Y Z
X Z X Z X Z
u v w
u v w
u v w
u u v v w w
u u v v w w
u u v v w w
0
1
2 2 2
2 2 2
2 2 2
0
11
21
21
2=
+ +
+ +
+ +
+ +
+ +
+ +
, , ,
, , ,
, , ,
, , , , , ,
, , , , , ,
, , , , , ,
(D-15)
Chaque composante est une forme quadratique fonction de um
0
1.
Pour la ieme composante il suit :
[ ] ( )ε ξNLm
i Xm i
Xm
u F u0
1
0
1
0
11
2= , , (D-16)
avec les relations :
[ ] u qXm m m,
0
1
0 0
1= ξ ξε (D-17)
[ ][ ] [ ] [ ]
[ ] [ ] [ ][ ] [ ] [ ]
F
f
f
f
i
i
i
i
ξ
ξ
ξ
ξ
=
0 0
0 0
0 0
3 3
3 3
3 3
(D-18)

112 Interpolation cinématique et des déformations
[ ]fξ1
1 0 00 0 00 0 0
=
, [ ]fξ2
0 0 00 1 00 0 0
=
, [ ]fξ3
0 0 00 0 00 0 1
=
[ ]fξ4
0 1 01 0 00 0 0
=
, [ ]fξ5
0 0 00 0 10 1 0
=
, [ ]fξ6
0 0 10 0 01 0 0
=
(D-19)
En écrivant u Xm,
0
1 selon (D-11) il vient :
[ ] [ ]u q bXm m m,
0
1
0 0= ξ ξ (D-20)
[ ] [ ] [ ] [ ] [ ] ( )ε ξ ξ ξ ξ ξNLm
im m
Tm
Ti m m m
d b q F q b d0
1
0
1
0 0 0 0 0
11
2= (D-21)
Soit la définition de la ieme ligne de [ ]bNLm
0
1 :
[ ] [ ] [ ] [ ] [ ] [ ]( )b d b q F q bNLm
im m
Tm
Ti m m
0
1
0
1
0 0 0 0= ξ ξ ξ ξ ξ (D-22)
[ ] [ ]( )b d bNLm
im
qm i
0
1
0
1
0= , avec [ ]bq
m i,
0 symétrique (D-23)
D-4 Expression de la première variation du vecteur des déformations
On considère une configuration Ω0 qui se déforme en Ω1 .
[ ] [ ] ε ε εmLm
NLm
Lm
NLm m
b b d0
1
0
1
0
1
0 0
1
0
11
2= + = +( ) (D-24)
Si on envisage un déplacement différentiel virtuel nodal δdm
0 entrainant des déplacements
et des déformations virtuelles dans la structure, en différentiant l'expression de εm
0
1 on
obtient la déformation virtuelle δεm
0
1 :
[ ] [ ] [ ] [ ] δε δ δ δ δmLm m
Lm m
NLm m
NLm m
b d b d b d b d0
1
0 0
1
0 0 0
1
0
1
0
1
0
1
2
1
2= + + + (D-25)
La ieme composante de [ ] δ b dNLm m
0
1
0
1 s'écrit par symétrie (cf D-23) :
[ ] [ ] [ ] [ ] ( ) ( )δ δ δ δb d d b d d b d b dNLm m
im
qm i m m
qm i m
NLm
im
0
1
0
1
0 0 0
1
0
1
0 0 0
1
0= = =, , (D-26)
Comme [ ]bLm
0 ne dépend pas de d
m
0
1 il suit :
[ ] [ ] δε δmLm
NLm m
b b d0
1
0 0
1
0= +( ) (D-27)

Annexe D 113
D-5 Résultats sur les éléments de câble
Dans le cas d'un élément de câble (e=c), la démarche reste la même avec :
[ ] [ ] [ ][ ]N N Id N Idc c c
01 3 2 3
0= où
N
N
c
c1
2
1= −
=
ξ
ξ (D-28)
d d d d d d d d dc
X Y Z X Y Z0
1
1 20
1
1 1 1 2 2 20
1= =
r r (D-29)
r
r
gR
010=
∂
∂ξ,
r rg g01 02 0⋅ = avec
rg02 1= et
rr r
r rgg g
g g03
01 02
01 02
=∧
∧ (D-30)
[ ]a
jj
jj j
j jj j
cξ
0
11
21
31
21 11
31 21
31 11 0
0 00 00 0
00
0
=
(D-31)
[ ]b
N
N
N
N Ncξ
ξ
ξ
ξ
0
1
1
1
1 2
0
0 0
0 0 00 0
0 0 00 0
0 0 0
= ↔
,
,
,
Idem (D-32)

Annexe E 115
Annexe E
Convergence de la Méthode des Densités de Contraintes Surfaciques
Nous allons montrer que [ ] [ ]limp
p
→∞=Ai 03 , ce qui signifie également que
limp
(p 1) (p)( )→∞
+− =X Xi i 0 ; c'est à dire que le processus converge vers la position
d'équilibre du noeud i (convergence locale) [MAU 98].
Ceci est vérifié si une des propriétés suivantes est satisfaite :
- (P1) Toutes les valeurs propres de [ ]Ai sont positives et strictement inférieures à 1.
- (P2) Tous les termes de [ ]Ai sont positifs et inférieurs à 1 avec, comparés un à un, tous les
coefficients de [ ]Ai2
inférieurs à ceux de [ ]Ai .
En notant pour simplifier ∆ Xj Xj j
= 3 2 , ∆Yj Yj j
= 3 2 et ∆Zj Zj j
= 3 2 , il vient :
A Qq
q
q
q q
XXi sjj
m
Xj
sj Xj
sk kk
mj
m sj Xjj
m
sj Xj sj Yj Zjj
m
j
m
i
i
i
i
ii= = =
+ +=
=
=
=
==
∑
∑
∑
∑
∑∑1
22
2
1
1
2
1
2 2 2
11
∆∆
∆
∆ ∆ ∆lb ( ) (E-1)
On a ainsi 0 1< <AXXi (également 0 1< <AYYi ; 0 1< <AZZi ) avec A A AXXi YYi ZZi+ + = 1 .
De plus nous pouvons écrire :
( )( )
( )∑ ∑
∑∑
= =
=
=∆+∆+∆
∆∆
=∆∆=i i
i
i
m
j
m
j
ZjsjYjXjsj
m
j
YjXjsjm
j
YjXjsjXYi
q
QA
1 1
222
1
1
(E-2)
Comme pour tout noeud i il est vérifié que ( ) ( )22YjXjsjYjXjsj qq ∆+∆≤∆∆ , il suit :
AXYi < 1 ( et aussi AXZi < 1 ; AYZi < 1) (E-3)
En partant des relations suivantes :
( )
( ) ( )q q q qsj Xj Yjj
m
sj Xj Yjj
m
sj sk Xj Xk Yj Ykj k j k
mi i i
∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆= = ≠
∑ ∑ ∑= +1
2 2 2 2
1
2,
(E-4)
( )
( ) ( ) ( )q q q q qsj Xjj
m
sj Yjj
m
sj Xj Yjj
m
sj sk Xj Yk Xk Yjj k j k
mi i i i
∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆2
1
2
1
2 2 2
1
2 2 2 2
= = = ≠
∑ ∑ ∑ ∑= + +,
(E-5)

116 Convergence de la MDCS
Il résulte :
( )
( ) ( ) ( ) ( )q q q q qsj Xjj
m
sj Yjj
m
sj Xj Yjj
m
sj sk Xj Yk Xk Yjj k j k
mi i i i
∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆2
1
2
1 1
2 2 0= = = ≠
∑ ∑ ∑ ∑− = − >,
(E-6)
Nous montrons ainsi que :
A A AXYi XXi YYi2
< (et A A AXZi XXi ZZi2
< ; A A AYZi YYi ZZi2
< ) (E-7)
L'inéquation suivante est alors satisfaite :
( )A A A A A A A AXXi XYi XZi XXi XXi YYi ZZi XXi2 2 2 2
+ + < + + = (E-8)
Ce qui montre que le premier terme diagonal de [ ]Ai2
est inférieur au premier terme diagonal
de [ ]Ai . En suivant une démarche identique, cette considération s'applique également aux
autres termes diagonaux.
Les relations précédentes permettent de poser :
A A A A A AXYi XZi YZi XXi YYi ZZi< (et A A A AXZi YZi XYi ZZi< ) (E-9)
Soit :
( )A A A A AXYi ZZi XZi YZi XYi1− + < (E-10)
Ce qui aboutit à :
( )A A A A A AXYi XXi YYi XZi YZi XYi+ + < (E-11)
Cette inéquation démontre que le premier terme non diagonal XY de [ ]Ai2
est inférieur à sa
valeur dans la matrice [ ]Ai .
Nous voyons ici que les conditions (P2) sont satisfaites et dès lors [ ] [ ]limp
p
→∞=Ai 03 .
Dans le cas où il existe des éléments de câbles (ralingue), on écrit à l'itération p+1 :
X Q X Q Xi scjj
m
j csjj
ci
j
i
j
(p 1)b
(p) (p)+
= =
= +∑ ∑1
24
15l (E-12)
avec Qq
q q
scjsj
sk k kk
c
k
m ii=
+==
∑∑ l lb2
11
et Qq
q q
csjj
sk k kk
c
k
m ii=
+==
∑∑
l
llb2
11
(E-13)

Annexe E 117
D'où la relation :
( )A
q
q q q
XXi
sj Xjj
m
sj Xj sj Yj Zj jj
c
j
m
j
m
i
iii=
+ + +
<=
===
∑
∑∑∑
∆
∆ ∆ ∆
2
1
2 2 2
111
1
l
(E-14)
il vient aussi :
0 1< <AYYi ; 0 1< <AZZi et A A AXXi YYi ZZi+ + < 1 (E-15)
Un raisonnement identique à celui développé ci-dessus permet de démontrer que tous
les termes de [ ]Aip
tendent vers zéro lorsque p tend vers l'infini.

Annexe F 119
Annexe F
Etude de la définie-positivité des matrices de caractérisation énergétique
Il s'agit de démontrer que les matrices généralisées de caractérisation énergétique sont
définies positives, condition nécessaire à la stabilité mécanique des structures calculées.
F-1 Cas d'une structure à base de câbles
[ ]D est définie positive sur Ker AT si il est vérifié que ∀ ∈ −dK
T( )Ker A 0 alors
( ) [ ] Wd d d D dK K K K= > 0
Pour un réseau de câbles, nous avons D Dij ji= < 0 par symétrie et D D Dijj j i
ii ii= ≠
∑ = − + >1
0( )
*N
.
Les termes Dii*
> 0 proviennent de l'élimination des lignes et colonnes de [ ]D par assemblage
des matrices élémentaires [ ]dc suivant les conditions aux limites requises.
En notant pour simplifier d di Ki= et en développant il vient :
Wd d D d d D d D d d D d DK i ii i j ijj j ii
i ijj j i
i j ij i iij j ii
= + = − + += ≠= = ≠ = ≠=
∑∑ ∑ ∑∑( ) ( )( ) ( )( ) ( ) ( )
2
11
2
1
2
11
NN N NN* (F-1)
avec ( ) ( )( )
( )( )− = − −= ≠= = +=
∑∑ ∑∑d D D d di ijj j ii
ij i jj ii
2
11
2 2
11
NN NN
(F-2)
et ( ) ( )( )( ) ( )( )
d d D d d Di j ijj j ii
i j ijj ii= ≠= = +=
∑∑ ∑∑=
11 11
2NN NN
car D Dij ji= (F-3)
D'où la relation :
Wd D d d dj d d DK ij i i j i iij ii
= − + − += +=
∑∑( )( )( )2 2 2
11
2 *NN
(F-4)
Nous en déduisons :
Wd D d d d DK ij i j i iij ii
= − − += +=
∑∑( )( )( )2 2
11
0*NN
> (F-5)
La matrice généralisée de caractérisation énergétique [ ]D est par conséquent définie positive.
Cette étude permet de plus de vérifier que [ ] d D dK K ≠ 0 pour un déplacement
dK ≠ 0 .
On peut donc en déduire que les mécanismes d'une structure tendue sont d'un ordre égal à un.

120 Définie-positivité de [D]
Remarque : Si les conditions d'appui ne sont pas prises en considération lors de l'assemblage
(soit Dii*
= 0 ), on vérifie ( )Wd dK K = 0 pour d di j= (mouvement de solide rigide) et [ ]D
devient alors seulement semi définie positive.
F-2 Cas d'une structure à base de membranes
L'étude est ici abordée différemment et utilise la remarque que nous venons de formuler
s'agissant des systèmes de câbles tendus.
Une analyse des déplacements sur un élément de membrane permet d'écrire que :
r r r r r
r r r r r
r r r r r
d d d d d
d d d d d
d d d d d
K K K K K
K K K K K
K K K K K
232
132
122
13 12
132
232
122
23 12
122
232
132
23 13
2
2
2
= + −
= + −
= + −
(F-6)
La discussion porte sur les valeurs possibles de la matrice [ ]mm
définie page 31
(relation I-64).
Si mm1 0> et m
m3 0< , l'énergie de déformation élémentaire se met sous la forme :
w v m m d m m d m d ddm
r
mm m m
Km m
Km
K KK≈ + + + − ≥2
0 1 2 132
1 3 122
1 13 12
1
22 0σ ( )( ) ( )
r r r r (F-7)
Selon les relations (I-67), il est alors évident que wdm
K≥ 0
De même si mm1 0< et m
m3 0> , on a :
w v m m d m m d m d ddm
r
mm m m
Km m
Km
K KK≈ + + + − ≥2
0 1 2 132
1 3 122
1 13 12
1
22 0σ ( )( ) ( )
r r r r (F-8)
Dans tous les cas, il est possible de montrer de façon similaire que wdm
K≥ 0 et par
conséquent que les matrices élémentaires de caractérisation énergétique [ ]dm sont semi
définies positives.
En se référant à la remarque précédente, l'assemblage des matrices [ ]dm par prise en compte
des conditions aux limites de la structure conduit alors vers une matrice généralisée de
caractérisation énergétique [ ]D également définie positive.

Annexe G 121
Annexe G
Calcul des dérivées des fonctions de forme pour les éléments T6 et T10
Cette section apporte les éléments nécessaires à la détermination des caractéristiques
géométriques des surfaces.
G-1 Définition des fonctions de forme
Pour le Triangle T6 (deg=6) on a :
ξ
η
( )1 0 0, ( )3 1 0,2
( )5 0 1,
46
avec λ ξ η= − −1
( )
( )
N
N
N
m
m
m
1
2
3
2 1
4
2 1
= −
=
= −
λ λ
ξλ
ξ ξ
, ( )N
N
N
m
m
m
4
5
6
4
2 1
4
=
= −
=
ξη
η η
ηλ
(G-1)
Pour le Triangle T10 (deg=10) il vient :
ξ
η
( )1 0 0,
6
( )3 0 1,
( )2 1 0,4 5
78
910
N
N
N
N
N
m
m
m
m
m
13 2
23 2
33 2
42
52
9
2
9
29
2
9
29
2
9
227
2
9
227
2
9
2
= − +
= − +
= − +
= −
= −
λ λ λ
ξ ξ ξ
η η η
ξλ ξλ
λξ ξλ
,
N
N
N
N
N
m
m
m
m
m
62
72
82
92
10
27
2
9
227
2
9
227
2
9
227
2
9
227
= −
= −
= −
= −
=
ηξ ξη
ξη ξη
λη λη
ηλ λη
λξη
(G-2)
G-2 Dérivées des fonctions de forme par rapport aux coordonnées intrinsèques
Pour le Triangle T6 :
( )
( )
N N N N N N
N
N
N
N
N
N
im
im
im
im
im
im
m
m
m
m
m
m
, , , , ,ξ η ξξ ξη ηη
λ λ
λ ξ ξ
ξ
η ξ
η
η ξ η
1
2
3
4
5
6
1 4 1 4 4 4 4
4 4 8 4 0
4 1 0 4 0 0
4 4 0 4 0
0 4 1 0 0 4
4 4 1 2 0 4 8
− −
− − − −
−
−
− − − − −
(G-3)

122 Dérivation des fonctions de forme
Pour le Triangle T10 (G-4) :
ξ−ξ−η−λη−ηξ−λξηξ−ηλ
+η+λ−+η+λ−ηη+λ−ηλ+ηη+λη−
+λ+η−+η−η+λ−ηλ−η−η+η−
ξ−ηξ−ξηη−η
−ξηξ−ξη−ξη
+ξ−+λ+ξ−ξ+ξ−ξ+λ−ξλ+ξ−
ξ+ξ+λ−+ξ+λ−ξ+ξλ−ξ+λ−ξλ−λ
−η+η−η
−ξ+ξ−ξ
−λ−λ−λ−λ+λ−−λ+λ−
ηηξηξξηξ
542727275427272727
927542
9272727
2
9
2
927
2
2
27
2
927
927542
927
2
9
2
927
2
2
27
2
92
2
27
272
927
2
927
2
92
2
272
92727
2
92
2
27
2
927
2
92792754
2
92
2
27
2
9
2
927
2
2
27
272
9272792754
2
927
2
9
2
927
2
2
27
927192
2
27
927192
2
27
927927927192
2
2719
2
2
27
10
9
8
7
6
5
4
3
2
1
0
0
0
0
000
000
,,,,,
m
m
m
m
m
m
m
m
m
m
mi
N
N
N
N
N
N
N
N
N
N
miNm
iNmiNm
iNmiNN
G-3 Calcul du jacobien et de ses dérivées
On calcule le déterminant du jacobien Dξ selon :
D N N X Y X Yim
jm
i ji j j iξ ξ η= −
=∑ , ,, 1
deg
( ) (G-5)
Puis ses dérivées :
D N N N N X Y X Y
D N N N N X Y X Y
im
jm
im
jm
i ji j j i
im
jm
im
jm
i ji j j i
ξ ξ ξξ η ξ ηξ
ξ η ξη η ξ ηη
, , , , ,,
, , , , ,,
= + −
= + −
=
=
∑
∑
( )
( )
deg
deg
( )
( )
1
1
et
DD
D
DD
D
ξ ξξ ξ
ξ
ξ ηξ η
ξ
,
,
,
,
−
−
=−
=−
12
12
(G-6)

Annexe G 123
G-4 Calcul des dérivées des fonctions de forme
G-4-1 Calcul des dérivées premières :
En considérant les éléments de l'inverse de la matrice jacobienne :
aX
ξ
∂ξ
∂= , b
Xξ
∂η
∂= , c
Yξ
∂ξ
∂= et d
Yξ
∂η
∂= (G-7)
On peut calculer les dérivées partielles :
NN
X
N
X
N
Xa N b Ni X
m im
im
im
im
im
, , ,= = + = +∂
∂
∂
∂ξ
∂ξ
∂
∂
∂η
∂η
∂ ξ ξ ξ η
NN
Y
N
Y
N
Yc N d Ni Y
m im
im
im
im
im
, , ,= = + = +∂
∂
∂
∂ξ
∂ξ
∂
∂
∂η
∂η
∂ ξ ξ ξ η
(G-8)
avec :
a D N Y
b D N Y
im
ii
im
ii
ξ ξ η
ξ ξ ξ
=
= −
−
=
−
=
∑
∑
1
1
1
1
,
,
deg
deg et
c D N X
d D N X
im
ii
im
ii
ξ ξ η
ξ ξ ξ
= −
=
−
=
−
=
∑
∑
1
1
1
1
,
,
deg
deg (G-9)
G-4-2 Calcul des dérivées secondes :
Avec les coefficients (G-10) :
a D N Y D N Y
a D N Y D N Y
b D N Y D N Y
b D N Y D N Y
im
ii i
m
ii
im
ii i
m
ii
im
ii i
m
ii
im
ii i
m
ii
ξ ξ ξ ξ η ξ ηξ
ξ η ξ η η ξ ηη
ξ ξ ξ ξ ξ ξ ξξ
ξ η ξ η ξ ξ ξη
, , , ,
, , , ,
, , , ,
, , , ,
= +
= +
= − −
= − −
−
=
−
=
−
=
−
=
−
=
−
=
−
=
−
=
∑ ∑
∑ ∑
∑ ∑
∑ ∑
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
deg deg
deg deg
deg deg
deg deg
et
c D N X D N X
c D N X D N X
d D N X D N X
d D N X D N X
im
ii i
m
ii
im
ii i
m
ii
im
ii i
m
ii
im
ii i
m
ii
ξ ξ ξ ξ η ξ ηξ
ξ η ξ η η ξ ηη
ξ ξ ξ ξ ξ ξ ξξ
ξ η ξ η ξ ξ ξη
, , , ,
, , , ,
, , , ,
, , , ,
= − −
= − −
= +
= +
−
=
−
=
−
=
−
=
−
=
−
=
−
=
−
=
∑ ∑
∑ ∑
∑ ∑
∑ ∑
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
deg deg
deg deg
deg deg
deg deg
Il vient les relations (G-11) :
N a N b N a b N a a b a N a b b b N
N a c N b d N c b a d N c a d a N c b d b N
N c N d N
i XXm
im
im
im
im
im
i XYm
im
im
im
im
im
i YYm
im
i
, , , , , , , , , ,
, , , , , , , , , ,
, ,
= + + + + + +
= + + + + + + +
= +
ξ ξξ ξ ηη ξ ξ ξη ξ ξ ξ ξ ξ η ξ ξ ξ ξ ξ ξ η η
ξ ξ ξξ ξ ξ ηη ξ ξ ξ ξ ξη ξ ξ ξ ξ ξ η ξ ξ ξ ξ ξ ξ η η
ξ ξξ ξ
2 2
2 2
2 ( ) ( )
( ) ( ) ( )
, , , , , , , ,ηη ξ ξ ξη ξ ξ ξ ξ ξ η ξ ξ ξ ξ ξ ξ η ηm
im
im
im
c d N c c d c N c d d d N+ + + + +
2 ( ) ( )

Annexe H 125
Annexe H
Résolution de systèmes par méthodes de Moindres Carrés
On recherche le vecteur des déplacements d fth
*
0 tel que :
[ ] A B
( f ) ( f ) ( )
fth
σ σ* * *. . .3 1 3 1
0
m m
d
n n
= (H-1)
Si 3m > nf ce système ne possède pas en général de solution, ce qui conduit à chercher le
vecteur d fcal
*
0 qui réalise le minimum de [ ] Θ( )f fA Bd d
* * * *
0 0
2= −σ σ .
H-1 Résolution par Factorisation de Householder
On utilise la factorisation de [ ]Aσ * selon [THE 86] :
[ ] [ ] [ ]A Q R( ) ( f )
σ *. .
=3 3 3m m m n
avec [ ] [ ][ ]
RR
=
0 où [ ]R
( A f )r n.
(H-2)
[ ]R est une matrice triangulaire supérieure et [ ]Q une matrice orthogonale.
Il faut de plus définir le vecteur C par :
[ ]
C Q BC
C
1= =
Tσ *
2
où C1( A )r .1
(H-3)
Deux cas peuvent se présenter selon la valeur du rang rA de la matrice [ ]Aσ *.
Cas 1 : on a rA f= n
Dans cette situation, la solution d fcal
*
0 est unique et se détermine avec la matrice triangulaire
[ ]R par :
[ ] R Cfcal
1d*
0= (H-4)
Cas 2 : on a rA f< n
Il existe ici une infinité de solutions. La méthode suivante permet de déterminer celle de
norme euclidienne minimale.
Il faut construire la matrice orthogonale [ ]P telle que :
[ ] [ ] [ ]R V P= (H-5)

126 Méthodes de Moindres Carrés
La matrice [ ]V est calculée par transformations successives de Givens [LAW 92]. Pour cela,
on considère la procédure suivante :
[ ] [ ] [ ]~ ~,V G V
( )A
A
A
( )i
i r
j r ij r
m
i
1
11
3
1
≤ ≤
+ −= +
−= ∏ (H-6)
où tous les coefficients de la matrice de Givens [ ]GAj r i, + −1 sont nuls sauf :
[ ]( )GAj r i k k, + − =1 1 pour k j≠ et k r i≠ + −A 1 (H-7)
[ ] [ ]( ) ( )G G cosA A A Aj r i j j j r i r i r i, ,+ − + − + − + −= =1 1 1 1 ϑ (H-8)
[ ] [ ]( ) ( )G G sinA A A Aj r i r i j j r i j r i, ,+ − + − + − + −= − =1 1 1 1 ϑ (H-9)
avec l'angle ϑ défini par :
[ ] [ ]tg V V( ) ( )A A A
ϑ~ ~
i r i r i i j r i− + − + − − + −=1 1 1 1 1 (H-10)
En final, on obtient :
[ ] [ ]V VA
Tr=
~ avec l'écriture [ ] [ ] [ ][ ]V S= 0 où [ ]S
( A A )r r.
(H-11)
La résolution s'effectue en considérant le vecteur $Uf tel que :
$$
.
UU
f
( f )n 1
1
0=
où [ ] $
.
U11
1( A )
S C1
r
=−
(H-12)
Le vecteur déplacement d fcal
*
0 est ensuite calculé selon :
[ ] d Ufcal
fP*
$0 1
=−
(H-13)
H-2 Résolution par Inverses Généralisés
On considère la matrice inverse généralisée (ou pseudo-inverse) [ ]Aσ *
+ de [ ]Aσ *
.
Pour les systèmes inconsistants, on identifie la solution d fcal
*
0de (H-1) de plus petite norme
euclidienne par l'équation [CIA 82] :
[ ] d fcal A B
* * *
0=
+σ σ (H-14)

Annexe I 127
Annexe I
A propos des abeilles ...
"Dirai-je encore un mot: ces cellules des abeilles, tant vantées, tant admirées, me fournissent: une preuve de plus contre l'enthousiasme et l'admiration; cette figure, toute géométrique et toute régulière qu'elle nous paraît, et qu'elle est en effet dans la spéculation, n'est ici qu'un résultat mécanique et assez imparfait qui se trouve souvent dans la nature, et que l'on remarque même dans les productions les plus brutes, les cristaux et plusieurs autres pierres, quelques sels, etc., prennent constamment cette figure dans leur formation. Qu'on observe les petites écailles de la peau d'une roussette, on verra qu'elles sont hexagones, parce que chaque écaille croissant en même temps se fait obstacle et tend à occuper le plus d'espace qu'il est possible dans un espace donné: on voit ces mêmes hexagones dans le second estomac des animaux ruminants, on les trouve dans les graines, dans leurs capsules, dans certaines fleurs, etc. Qu'on remplisse un vaisseau de pois, ou plutôt de quelque autre graine cylindrique, et qu'on le ferme exactement après y avoir versé autant d'eau que les intervalles qui restent entre ces graines peuvent en recevoir, qu'on fasse bouillir cette eau, tous ces cylindres deviendront de colonnes à six pans. On y voit clairement la raison, qui est purement mécanique; chaque graine, dont la figure est cylindrique, tend par son renflement à occuper le plus d'espace possible dans un espace donné, elles deviennent donc toutes nécessairement hexagones par la compression réciproque. Chaque abeille cherche à occuper de même le plus d'espace possible dans un espace donné, il est donc nécessaire aussi, puisque le corps des abeilles est cylindrique, que leurs cellules sont hexagone par la même raison des obstacles réciproques. On donne plus d'esprit aux mouches dont les ouvrages sont les plus réguliers; les abeilles sont, dit-on, plus ingénieuses que les guêpes, que les frelons, etc., qui savent aussi l'architecture, mais dont les construction sont plus grossières et plus irrégulières que celles des abeilles: on ne veut pas voir, ou l'on ne se doute pas, que cette régularité, plus ou moins grande, dépend uniquement du nombre et de la figure, et nullement de l'intelligence de ces petites bêtes; plus elles sont nombreuses, plus il y a des forces qui agissent également et s'opposent de même, plus il y a par conséquent de contrainte mécanique, de régularité forcée, et de perfection apparente dans leurs productions."
G.L. Buffon, Histoire Naturelle, IV, p.99, Paris 1753.
BIBLIOGRAPHIE

Bibliographie 129
BIBLIOGRAPHIE [ALL 92] ALLERA R., Mise en forme des structures textiles tendues, Thèse de doctorat, Institut national polytechnique de Grenoble (1992). [BAA 85] Al BAALI M., Descent property and global convergence of the Fletcher-Reeves method with inexact line search, IMA J. Numer. Anal., 5 (1985), pp 121-124. [BAM 81] BAMBERGER Y., Mécanique de l'ingénieur I, Systèmes de corps rigides, Ed. Hermann (1981). [BAR 75] BARNES M.R. , Applications of dynamic relaxation to the design and analysis of cable, membrane and pneumatic structures, 2nd Internat , Conf. on Space Structures, Guildford (1975). [BAR 76] BARNES M.R., Form-finding of minimum surface membranes, IASS World Congress on Space Enclosures, Univ. of Montreal, (1976) pp 115-124. [BAR 80] BARNES M.R. , Non-linear numerical solution methods for static and dynamic analysis of tension structures, Air-supported Structures: the State of the Art Institution of Structural Engineers, London, (1980) pp 8-56. [BAR 88] BARNES M.R. and WAKEFIELD D.S., Form-finding, analysis and patterning of surface-stressed structures, First O. Kerensky Memorial Conf., London (1988). [BAT 82] BATHE K.J., Finite Element procedures in engineering analysis, Prentice Hall, London (1982). [BAT 92] BATOZ J.L. et DHATT G., Modélisation des structures par Elément Finis, Vols. 1 à 3, Ed. Hermes (1992). [BLE 95] BLETZINGER K.W., Form-finding of membrane structures and minimal surfaces by numerical continuation, 1st World Congress on Structural and Multidisciplinary Optimization, Goslar Germany, (1995) pp 563-568. [BLE 97] BLETZINGER K.W., Form-finding of tensile structures by the updated reference strategy, Symp.of the IASS, Nottingham, (1997) pp 68-75. [CAP 90] CAPODANNO P., Eléments de la théorie de la stabilité du mouvement, Université Montpellier II (1990). [CIA 78] CIARLET P., The Finite Element Method for elliptic problems, North Holland Ed. (1978). [CIA 82] CIARLET P., Introduction à l'analyse numérique matricielle et à l'optimisation, Ed. Masson (1982). [COI 87] COINEAU Y et KRESLING B., Les inventions de la nature et la bionique, Ed. Hachette (1987). [DAR 17] D'ARCY THOMPSON, On Growth and Form, Vols 1 and 2, Cambridge Univ. Press (1917). [DAY 65] DAY A., An introduction to Dynamic Relaxation, The Engineer Revue, (1965) pp 218-221. [DRO 96] DROZDOV A., Finite elasticity and viscoelasticity - Non linear mechanics of solids, World Scientific, London (1996). [FEL 79] FELGENDREHER N. und SCHWENKEL D., Herstellung werkstattgerechter Zuschnittspläne mit hilfe der EDV, Kraftdichtemethode zur Membranberechung, Int. Symp. on Weitgespannte Flächentragwerke No 64, Stuttgart (1979). [FER 89] FERRARI Tissage et Enduction, Rapport documentaire sur les produits, La Tour du Pin, France (1989).

130 Bibliographie
[FLE 72] FLETCHER R. and REEVES C.M., Function minimization by conjugate gradient method, IBM J. Res. Develop. 16, (1972) pp 431-433. [GAY 91] GAY D., Matériaux composites, Ed. Hermes (1991). [GER 86] GERMAIN P., Mécanique, Tomes 1 et 2, Ed. Ellipses,Paris 1986. [GIL 92] GILERT J.C. and NOCEDAL J., Global convergence properties of conjugate gradient methods for optimization, SIAM J. Optim., Vol.2 No. 1, (1992) pp 21-42. [GOR 78] GORDON J.E., Structures or why things dont't fall down, Penguin Books (1978). [GRÜ 88] GRÜNDIG L., Minimal surfaces for Form-finding of structural membranes, Comp. and Structures, Vol. 30 No.3, (1988) pp 679-683. [GRÜ 90] GRÜNDIG L. and BÄUERLE J., Automated cutting pattern determination and control for prestressed membranes, Textile Composites in Buil. Cons., Part 2, Ed. Pluralis, (1990) pp 109-120. [HAB 82] HABER R.B. and ABEL J.F., Initial equilibrium solution methods for cable reinforced membranes, Part I and II, Comput Meths.Appl. Mech. Engrg. , Vol. 30, (1982) pp 263-289 and 285-306. [HAU 72] HAUG E. and POWELL G.H., Analytical shape finding for cable nets, IASS Pacific Symp. Part II on Tension structures and Space Frames, Tokyo and Kyoto, (1972) pp 83-92. [HAU 72] HAUG E. and POWELL G.H., Finite element analysis of nonlinear membrane structures, IASS Pacific Symp. Part II on Tension structures and Space Frames, Tokyo and Kyoto, (1972) pp 124-135. [HAU 87] HAUG E., Numerical calculation of minimal surfaces, IL 18, (1987) pp 370-380. [HIL 85] HILDEBRANT S. and TROMBA A., Mathematics and optimal forms, Scientific American Library (1985). [HOF 93] HOFFMAN D., How to use a computer to find new minimal surface?, Société Mathématique de France, (1993) pp 1-29. [HOL 97] HOLGATE A., The art of structural engineering, A. Menges Ed., Stuttgart (1997). [IMB 84] IMBERT J.F. , Analyse des structures par Eléments Finis, 2eme édition, Ed. Cepadues (1984). [ISE 78] ISENBERG C., The science of soap films and soap bubbles, Tieto Ltd. (1978). [ISH 95] ISHII K., Membrane structures in Japan, SP Publishing Company, Tokyo (1995). [KNE 92] KNEEN P., Computer aided Form-finding for lightweight tension structures, Int Sem. on Structural Morphology, Montpellier, (1992) pp 455-467. [JAV 94] JAVELLE J.C., Contribution à l'étude de la mise à plat des textiles en prenant en compte leur élasticité, Thèse de doctorat, Université Lyon I (1994). [LAW 74] LAWSON C. and HANSON R., Solving least square problems, Ed. Prentice Hall (1974). [LAW 92] LAWSON H.B., Minimal surfaces, Today's Mathematics, (1992) pp 29-48. [LEO 88] LEONARD J.W., Tension Structures, McGraw Hill Ed. (1988). [LEW 96] LEWIS W. J. and T. S., Application of Formian and Dynamic Relaxation to the Form- finding of Minimal Surfaces, IASS Vol. 37, (1996) pp 165-186. [LIN 71] LINKWITZ K. und SCHEK H.J., Einige Bemerkungen von vorgespannten Seilnetzkonstruktionen, Ingenieur-Archiv 40, Springer-Verlag (1971) pp 145-158. [LIN 76] LINKWITZ K., Combined use of computation techniques and models for the process of form-finding for prestressed nets, grid shelles and membranes, Int. Symp. on Weitgespannte Flächentragwerke No 64, Stuttgart (1976) pp 84-97.

Bibliographie 131
[LIN 87] LINKWITZ K. and GRÜNDIG L., Strategies for Form-finding and design of cutting patterns for large sensitive membrane structures, Int. Conf. Design and non conventional Structures, London, (1987) pp 315-321. [LIN 93] LINKWITZ K., Least squares methods in non-linear Form-finding and analysis of prestressed and hanging nets, SEIKEN-IASS Symp. in non-linear analysis and Design for Shell and Spatial Structures, Tokyo, (1993) pp 601-610. [MAG 52] MAGNUS R. H. and STIEFEL E., Methods of conjugate gradients for solving linear systems, Jour. of Research of the Nat. Bureau of Standarts, Vol. 49 No 6, (1952) pp 409-436. [MAH 91] MAHE M., Analyse non-linéaire géométrique des coques par éléments finis isoparamétriques dégénérés avec intégration explicite dans l'épaisseur, Revue des composites et matériaux nouveaux, Vol. 1 No 2, (1991) pp 198-227. [MAL 89] MALINOWSKI M. et MOTRO R., Un élément oublié de l'architecture : le textile, document pédagogique interne LMGC, Université Montpellier II (1989). [MAR 93] MARTY A., Modélisation de surfaces, Ed. GrRSLA, EALR (1993). [MAU 95] MAURIN B., La Méthode des Densités de Contraintes Surfaciques, Rapport de recherche interne LMGC (1995). [MAU 97] MAURIN B. and MOTRO R., Investigation of minimal forms with density methods, Jour. of the Int. Assoc. for Shell and Spatial Structures, Vol. 38 No. 3, (1997) pp 143-154. [MAU 97] MAURIN B. and MOTRO R., Density method and minimal forms computation, Int. Symp.of the IASS, Nottingham, (1997) pp 225-233. [MAU 98] MAURIN B. and MOTRO R., The Surface Stress Density method as a Form- finding tool for tensile membrane, Engineering Structures, Vol. 20 No. 8, (1998) pp 712-719. [MAU 98] MAURIN B. and MOTRO R., Form-finding and cutting pattern of textile membranes : new theoritical developments, Int. Symp. Techtextil, Lyon, (1998) pp 117-123. [MAU 98] MAURIN B. and MOTRO R., Cutting pattern with the Stress Composition Method, Space Structures -special issue "Form-finding of Tension Systems"- (accepté). [MAU 98] MAURIN B. and MOTRO R., Investigation of minimal forms with conjugate gradient method, Int. Journal of Solid and Structures (soumis). [MOR 90] MORE J.J. and THUENTE D.J., On line search algorithms with guaranted sufficient decrease, Math. and Comp. Science Division Preprint MCS-P153-0590, Argonne National Laboratory, Argonne, IL (1990). [MOT 92] MOTRO R., An approach to Structural Morphology, IASS Int Sem. on Structural Morphology, Montpellier, (1992) pp 1-11. [MUT 89] MUTIN F., Modélisation de membranes - Application à l'analyse mécanique des voiles de bateaux, Thèse de doctorat, Université de Nice Sophia Antipolis (1989). [NGU 79] NGUYEN-TUONG, Kraftdichtemethode zur Membranberechung, Int. Symp. on Weitgespannte Flächentragwerke No 64, Stuttgart (1979) pp 3.6-1 6-8. [NOO 93] NOOSHIN H. and DISNEY P., Formian, Multiscience Publishing Co. Ltd.(1993). [OTT 73] OTTO F., ed., Tensile Structures, Vols 1 and 2, MIT, Cambridge, MA (1973). [PAU 94] PAULI N., Recherche de forme et analyse statique orthotrope de membranes textiles, Thèse de doctorat, Université Montpellier II (1994). [PIC 97] PICON A., L'art de l'ingénieur, Ed. du Centre Pompidou, Paris (1997).
132 Bibliographie
[POW 77] POWELL M.J., Restart procedures for the conjugate gradient method, Math. Programming, 12, (1977) pp 241-254. [POW 86] POWELL M.J., Convergence properties of algorithms for nonlinear optimization, SIAM Rev., 28, (1986) pp 487-500. [REN 92] RENIER A., Géométrie et sémantique : la génération du Structural, Int Sem. on Structural Morphology, Montpellier, (1992) pp 25-42. [ROB 96] ROBBIN T., Engineering a new architecture, Yale University Press (1996). [SAL 92] SALERNO G., How to recognize the order of infinitesimal mechanisms : a numerical approach, Int. Jour. Num. Meth. Eng., Vol. 35, (1992) pp 1351-1395. [SHE 74] SHECK H. J., The Force Density Method for Form-finding and computations of general networks, Comput. Meths. Appl. Mech. Engrg., (1974) pp 115-134. [SHE 76] SHECK H. J., Über Ansätze und numerische Methoden zur Berechnung großer netzartiger Strukturen, Habilitation thesis, Stuttgart (1976) pp 18-19. [SHI 89] SHIMADA T. and TADA Y., Development of a curved surface using a Finite Element method, Int. Conf. on Comp. aided optimum Design of Structures, Southampton, (1989) pp 23-30. [SIN 95] SINGER P., Die Berechnung von Minimalflächen, Seifenblasen, Membrane und Pneus aus geodätisher Sicht, Deutsche Geodätishe Kommission, München, (1995). [STU 73] From "Stuttgart Leben", Wide spanning space structures : In Stuttgart werden die weichten für dis zukunft gestellt, (Januar 1973) pp 8-11. [THE 86] THEODOR R. et LASCAUX P., Analyse numérique matricielle appliquée à l'art de l'ingénieur, Tomes 1 et 2, Ed. Masson (1986). [TRO 92] TROMPETTE P., QUANG N. and DENIS H., Application of the off-axis tensile test for the determination of elastic coefficients of prestressed coated fabric, Second Proc. Int. Symp. on Textile Composite in Building Construction, Part 1 Ed. Pluralis, (1992) pp 193-202. [TSU 89] TSUBOTA H. and YOSHIDA A., Theoritical analysis for determining optimum cutting patterns for membrane structures, IASS Int. Symp.on tensile structures, Madrid, (1989) pp 512-536. [UST 87] d'USTON de VILLEREGLAN B., Conception et analyse mécanique de structures textiles tendues, Thèse de doctorat, INSA Lyon (1987). [VAL 48] VALIRON G., Théorie des fonctions, 2eme Edition, Masson Ed. (1948). [VAS 97] VASSART N., Recherche de forme et stabilité des systèmes réticulés autocontaints - Applications aux systèmes de tenségrité, Thèse de doctorat, Université Montpellier II (1997). [VAS 98] VASSART N., LAPORTE R., MOTRO R., Determination of the mechanism order for kinematically and statically indeterminate systems, Int. Journal of Solide and Structures (sous presse). [ZIE 79] ZIENKIEWICZ O., The Finite Element method in engineering science, McGraw- Hill Ed. (1979). [ZOU 70] ZOUTENDIJK G., Nonlinear programming computational methods, Integer and Nonlinear Prog., J. Ed. Abadie, North Holland, Amsterdam, (1970) pp 37-86.

Nom : MAURIN Prénom : Bernard
MORPHOGENESE DES MEMBRANES TEXTILES
ARCHITECTURALES
Thèse présentée à l'Université de Montpellier II - Sciences et Techniques -
pour obtenir le diplôme de Doctorat, mention Sciences,
Spécialité : Mécanique, Génie Mécanique, Génie Civil
No d'ordre : N
o CNU : 60
Résumé : Le développement des structures à base de toiles textiles tendues souligne l'insuffisance
des approches conceptuelles traditionnelles et nécessite de nouvelles méthodes. Les travaux
présentés dans ce mémoire se rapportent ainsi à l'étude des procédés de recherche de forme
des Membranes Textiles Architecturales et à la découpe de laizes. Nous mettons dans la première partie en évidence l'insuffisance d'une représentation
discrète des toiles tendues (réseaux de câbles) et proposons la méthode de recherche de forme
des Densités de Contraintes Surfaciques qui s'appuie sur une modélisation continue du
domaine. Cet aspect est complété par une étude de la stabilité ainsi que des mécanismes des
structures tendues.
La deuxième partie est consacrée à l'investigation de formes minimales : réseaux de
câbles de longueur minimale et surfaces d'aire minima. Deux méthodes sont présentées, une
première fondée sur l'utilisation des méthodes de Densités et une seconde approche liée à la
minimisation de fonctionnelles selon la méthode du Gradient Conjugué (problèmes
d'optimisation). Nous proposons également un outil autorisant le calcul des caractéristiques
géométriques des surfaces (valeurs des courbures moyennes et gaussiennes en tout point du
milieu).
La méthode de Composition des Contraintes dédiée à la détermination des formes de
découpe du tissu est présentée en troisième partie. Elle permet de prendre en considération
les paramètres de géométrie, état de prétension du domaine et rhéologie du matériau, tout en
atténuant les erreurs inhérentes à toute découpe de laizes (minimisation selon des méthodes de
moindres carrés).
Mots-clés : Architecture textile - Structures tendues - Recherche de forme - Méthode des
densités de contraintes surfaciques - Stabilité - Courbure des surfaces - Réseaux de longueur
minimale - Surfaces d'aire minimale - Découpe de laizes - Méthode de composition des
contraintes -
Date et lieu de soutenance : le 30 janvier 1998 à l'Université Montpellier II
Jury : MM. O. MAISONNEUVE Président
M. LEMAIRE Rapporteur
K. LINKWITZ Rapporteur
J.M. DELARUE Examinateur
H. NOOSHIN Examinateur
R. MOTRO Directeur de Thèse
Thèse préparée au Laboratoire de Mécanique et Génie Civil, Université Montpellier II
cc. 034, place Eugène Bataillon, 34095 Montpellier Cedex 5


















