TRAVAUX PRATIQUES D’AUTOMATISME - www …vandenbroucke/enseignement/TP_Auto_As... · ing 2 n....
32
ING 2 N. VANDENBROUCKE TRAVAUX PRATIQUES D’AUTOMATISME Cycle ingénieur – CING 2 ASCENSEUR AUTOMATE ROCKWELL SLC500
-
Upload
nguyentram -
Category
Documents
-
view
221 -
download
1
Transcript of TRAVAUX PRATIQUES D’AUTOMATISME - www …vandenbroucke/enseignement/TP_Auto_As... · ing 2 n....

ING 2 N. VANDENBROUCKE
TRAVAUX PRATIQUES D’AUTOMATISME
Cycle ingénieur – CING 2
ASCENSEUR
AUTOMATE ROCKWELL SLC500

- 2 -
CING 2 N. VANDENBROUCKE
Durant des siècles, les hommes ont essayé de défier la pesanteur. Tout d’abord, ils se sont accroupis et ont sauté, mais sans grand résultat. L’échelle a indéniablement constitué une avancée, mais une avancée limitée. Certains se sont fabriqué des ailes et se sont jetés du haut de falaises, en battant des ailes frénétiquement. D’autres se sont transformés en boulets de canon vivants. Aïe ! Enfin, Orville Wright a réalisé le premier vol motorisé à bord du " Flyer I " en 1903. Le reste, comme on dit, appartient à l’Histoire… Cinquante ans plus tôt, Elisha Graves Otis optait, lui, pour une approche plus pragmatique.
En 1853, la modification cruciale qu’il apporta au monte-charge, un appareil utilisé à l’origine pour soulever les matériaux, permit de transporter verticalement des passagers en toute sécurité. En quelques années, son monte-charge pour passagers allait autoriser la construction d’immeubles très hauts et transformer profondément et définitivement le paysage urbain. Depuis 1904, date de l’introduction par Otis Elevator Co. de l’ascenseur à traction électrique sans engrenage, les éléments de base ont fort peu évolué.
Prenez d’abord une cabine destinée à transporter des passagers. Ensuite, boulonnez une série de câbles sur le toit de la cabine et enroulez ces câbles autour d’une poulie raccordée à un moteur électrique, puis accrochez un contrepoids à l’autre extrémité des câbles. Parachevez-le tout en utilisant les possibilités de l’informatique de pointe et vous obtiendrez l’Elevonic d’Otis, un ascenseur à traction électrique sans engrenage. Ce modèle est installé dans des gratte-ciel du monde entier, notamment le plus haut d’entre eux, les Petronas Towers à Kuala Lumpur, en Malaisie.
1. Présentation du TP
Nous allons programmer grâce à un automate Rockwell automation un ascenseur desservant 5 étages.

- 3 -
CING 2 N. VANDENBROUCKE
Soit un ascenseur desservant un rez-de-chaussée "1" et quatre étages "2", "3", "4" et "5" (dans l'ordre 1, 2, 3, 4 et 5). A chaque étage, un utilisateur peut appeler l'ascenseur grâce à deux boutons d’appel extérieur (AE1, AE2M, AE2D, AE3M, AE3D, AE4M, AE4D et AE5) respectivement aux étages 1, 2, 3, 4 et 5.
La cabine de l'ascenseur comporte 5 boutons poussoirs d’appel intérieur AI1, AI2, AI3, AI4 et AI5 pour les demandes d'étage.
Cette cabine est entraînée par un moteur électrique à deux sens de marche KM1 et KM2 (montée et descente). La présence de la cabine à un étage est détectée par un capteur à chaque niveau Di (D1, D2, D3, D4 et D5). Elle doit s'arrêter lorsqu'elle rencontre le contact de l'étage (D1, D2, D3, D4 et D5) qui a été demandé.
Les commandes du moteur sont KM1 pour la montée, KM2 pour la descente et aucune action pour l'arrêt.
A chaque arrêt de l'ascenseur à un étage, nous attendons l'ouverture des portes de palier visualisées par les capteurs "D6, D7, D8, D9 et D10" et nous déclenchons une temporisation de 3 secondes. Au bout de ce temps, si les portes sont refermées D6, D7, D8, D9 ou D10=0, nous relançons l'ascenseur pour servir le prochain appel.
Pour des raisons de sécurité deux contacts supplémentaires ont été ajoutés FC1 et FC2. Ils sont destinés à détecter les éventuels dépassements de la cabine haut ou bas.
- 4 -
CING 2 N. VANDENBROUCKE
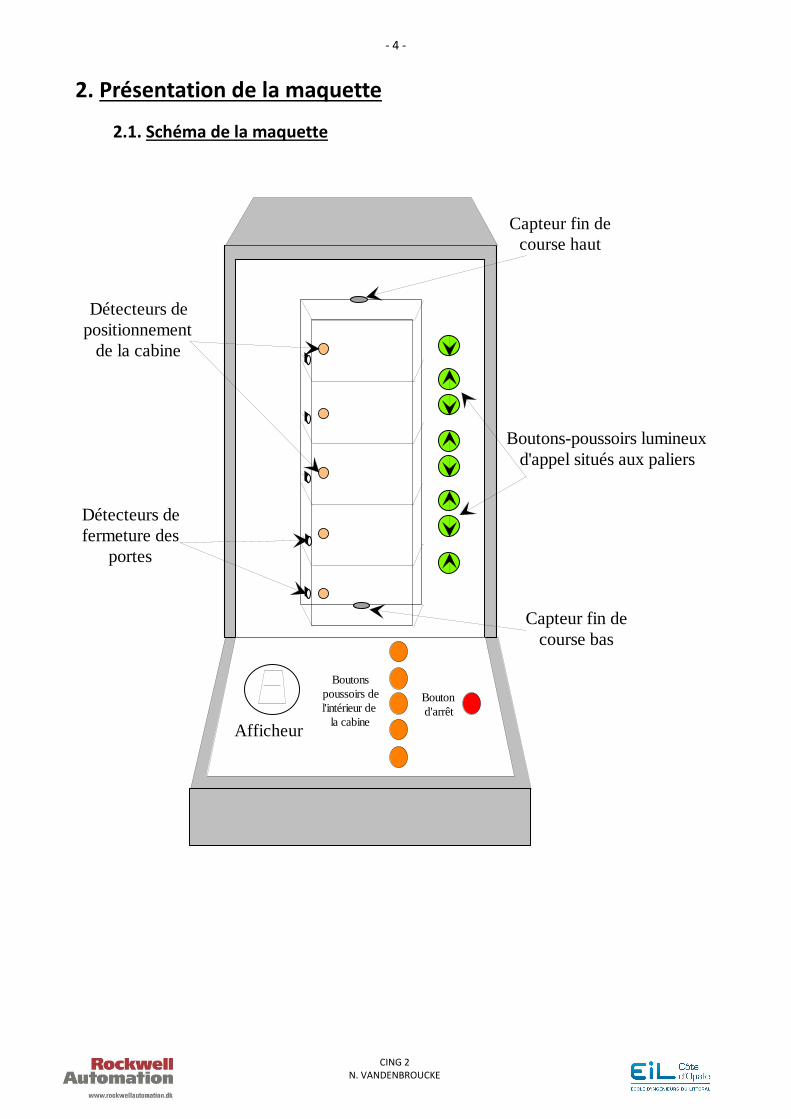
2. Présentation de la maquette
2.1. Schéma de la maquette
Afficheur
Boutons
poussoirs de
l'intérieur de
la cabine
Bouton
d'arrêt
Détecteurs de
fermeture des
portes
Détecteurs de
positionnement
de la cabine
Capteur fin de
course haut
Capteur fin de
course bas
Boutons-poussoirs lumineux
d'appel situés aux paliers
- 5 -
CING 2 N. VANDENBROUCKE
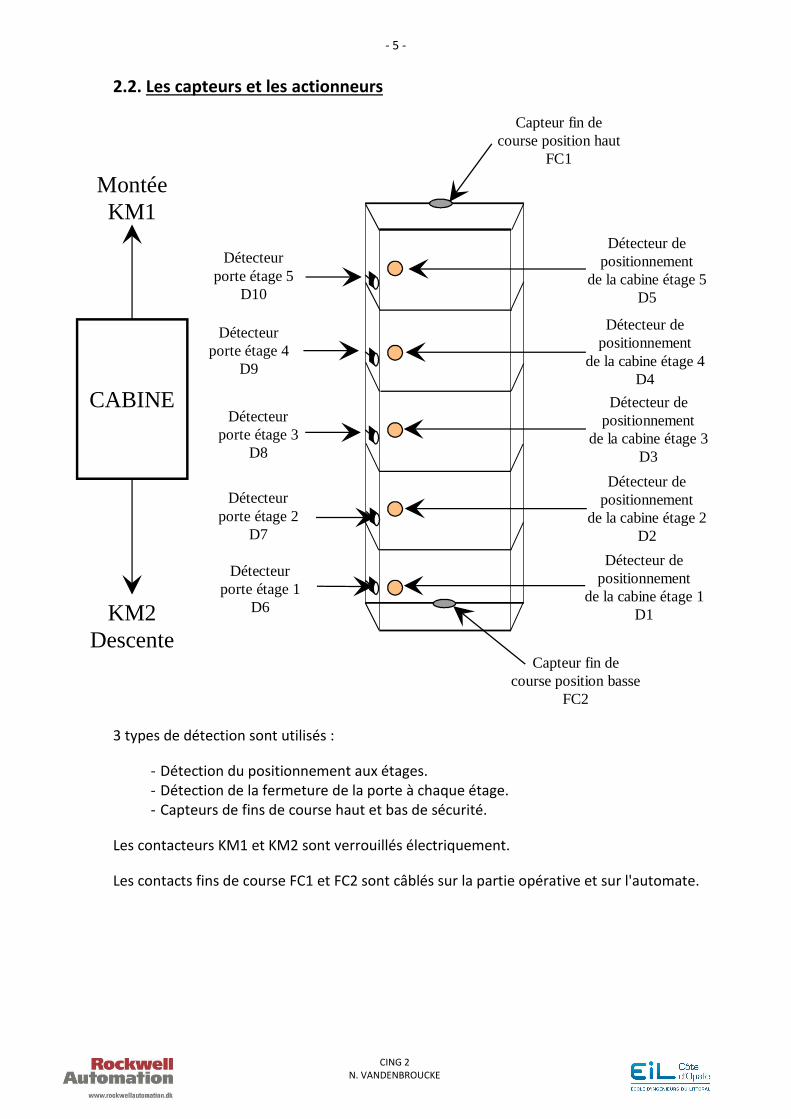
2.2. Les capteurs et les actionneurs
Détecteur
porte étage 1
D6
Détecteur de
positionnement
de la cabine étage 5
D5
Capteur fin de
course position haut
FC1
Capteur fin de
course position basse
FC2
Détecteur de
positionnement
de la cabine étage 4
D4
Détecteur de
positionnement
de la cabine étage 3
D3
Détecteur de
positionnement
de la cabine étage 2
D2
Détecteur de
positionnement
de la cabine étage 1
D1
Détecteur
porte étage 2
D7
Détecteur
porte étage 3
D8
Détecteur
porte étage 4
D9
Détecteur
porte étage 5
D10
CABINE
Montée
KM1
KM2
Descente
3 types de détection sont utilisés :
- Détection du positionnement aux étages. - Détection de la fermeture de la porte à chaque étage. - Capteurs de fins de course haut et bas de sécurité.
Les contacteurs KM1 et KM2 sont verrouillés électriquement.
Les contacts fins de course FC1 et FC2 sont câblés sur la partie opérative et sur l'automate.

- 6 -
CING 2 N. VANDENBROUCKE
2.3. Appareillage de commande
Afficheur
Boutons
poussoirs de
l'intérieur de
la cabine
Bouton
d'arrêt
Boutons-poussoirs lumineux d'appel palier
S11 - H10
S10 - H9
S12 - H11
S9 - H8
S13 - H112
S8 - H7
S14 - H13
S7 - H6
Capteur
Action
S6
S5 - H5
S4 - H4
S3 - H3
S2 - H2
S1 - H1
AI1
AI2
AI3
AI4
AI5
AE1
AE2D
AE3D
AE4D
AE5
AE2M
AE3M
AE4M

- 7 -
CING 2 N. VANDENBROUCKE
2.4. Repérage des entrées / sorties
Les voyants, les détecteurs de fermeture de porte ainsi que les fins de course ne seront pas utilisés dans ce TP.
Entrées
Mnémonique Commentaire Adresse
FC1 Fin de course bas I:3.0/7
FC2 Fin de course haut I:3.0/1
D1 Détecteur étage 1 I:3.0/2
D2 Détecteur étage 2 I:3.0/3
D3 Détecteur étage 3 I:3.0/4
D4 Détecteur étage 4 I:3.0/5
D5 Détecteur étage 5 I:3.0/6
D6 Détecteur porte étage 1 I:3.0/18
D7 Détecteur porte étage 2 I:3.0/19
D8 Détecteur porte étage 3 I:3.0/20
D9 Détecteur porte étage 4 I:3.0/21
D10 Détecteur porte étage 5 I:3.0/22
AI1 Demande étage 1 depuis cabine I:3.0/13
AI2 Demande étage 2 depuis cabine I:3.0/14
AI3 Demande étage 3 depuis cabine I:3.0/15
AI4 Demande étage 4 depuis cabine I:3.0/16
AI5 Demande étage 5 depuis cabine I:3.0/17
AU Arrêt d'urgence I:3.0/12
STOP Interrupteur auto/manu I:3.0/29
AE1 Appel étage 1 pour monter I:3.0/23
AE2M Appel étage 2 pour monter I:3.0/24
AE3M Appel étage 3 pour monter I:3.0/25
AE4M Appel étage 4 pour monter I:3.0/26
AE5 Appel étage 5 pour descendre I:3.0/11
AE4D Appel étage 4 pour descendre I:3.0/10
AE3D Appel étage 3 pour descendre I:3.0/9
AE2D Appel étage 2 pour descendre I:3.0/8
Sorties
Mnémonique Commentaire Adresse
KM1 Montée de la cabine O:1.0/7
KM2 Descente de la cabine O:1.0/6
H1 Voyant d'appel cabine étage 1 O:1.0/5
H2 Voyant d'appel cabine étage 2 O:1.0/4
H3 Voyant d'appel cabine étage 3 O:1.0/3
H4 Voyant d'appel cabine étage 4 O:1.0/2
H5 Voyant d'appel cabine étage 5 O:1.0/1

- 8 -
CING 2 N. VANDENBROUCKE
H6 Voyant d'appel palier étage 1 haut O:1.0/8
H7 Voyant d'appel palier étage 2 haut O:1.0/9
H8 Voyant d'appel palier étage 3 haut O:1.0/10
H9 Voyant d'appel palier étage 4 haut O:1.0/11
H10 Voyant d'appel palier étage 5 bas O:1.0/0
H11 Voyant d'appel palier étage 4 bas O:1.0/14
H12 Voyant d'appel palier étage 3 bas O:1.0/13
H13 Voyant d'appel palier étage 2 bas O:1.0/12
A8 Afficheur droit (poids fort) 8 O:2.0/3
A4 Afficheur droit 4 O:2.0/2
A2 Afficheur droit 2 O:2.0/1
A1 Afficheur droit (poids faible) 1 O:2.0/0
Mémentos
Mnémonique Commentaire Adresse
AM1 Appel mémorisé 1ère étage B:3.0/0
AM2 Appel mémorisé 2ème étage B:3.0/1
AM3 Appel mémorisé 3ème étage B:3.0/2
AM4 Appel mémorisé 4ème étage B:3.0/3
AM5 Appel mémorisé 5ème étage B:3.0/4
DD Demande de descente B:3.0/5
DM Demande de montée B:3.0/6
AR Demande d'arrêt B:3.0/7
Programmation par bit
Numéro d'étape
X10 Étape 10 B:3.0/8
X11 Étape 11 B:3.0/9
F10 B:3.0/10
F11 B:3.0/11
Programmation par mot
NUM Numéro d’étape N:7.0
F0 B:3.1/0
F1 B:3.1/1
F2 B:3.1/2
F3 B:3.1/3
F4 B:3.1/4
F5 B:3.1/5

- 9 -
CING 2 N. VANDENBROUCKE
3. Introduction du TP
3.1. Création d’un nouveau projet avec RSLogix500
- Créer un nouveau projet. Pour cela définir et nommer le processeur (cf. documentation sur le logiciel RSLogix500).
- Définir la configuration matérielle de votre châssis et configurer cette dernière en utilisant l’auto-configuration (bouton « Read IO Config » du menu « IO Configuration » du dossier « Controller »).
3.2. La communication
- Établir la communication entre l’automate et la console de programmation. Pour cela, mettre en œuvre le driver de communication sous RSLinx si nécessaire (cf. documentation RSLinx).
- Important : Dans le menu « Channel Configuration » du dossier « Controller », fixer la vitesse de transmission (en baud) de la voie 0 (Chan. 0) à 19200 bauds.
3.3. Chargement
- Tester votre configuration matérielle en effectuant un chargement "Download" puis en passant l’automate en mode "Online".
3.4. Forçage des sorties
- A l’aide du logiciel RSLogix500, effectuer le forçage des sorties suivantes (cf. documentation sur le logiciel RSLogix500). Pour cela, retrouver leur adresse SLC500 :
Variables Capteurs & Actionneurs Adresses Automate
Voyant demande palier étage 2 H7 sortie 9, carte 1
Voyant demande étage 5 H5 sortie 1, carte 1
Voyant demande étage 1 H1 sortie 5, carte 1
3.5. Mnémoniques
- Créer la table des mnémoniques.

- 10 -
CING 2 N. VANDENBROUCKE
4. Commande manuelle de la cabine
4.1. Analyse de fonctionnement
Ce cycle permet de piloter manuellement la cabine en cas de problème. Pour fonctionner dans ce mode, l’interrupteur STOP doit être à 1 (mode manuel). L’appui maintenu sur le bouton AI5 provoque la montée de la cabine. L’appui maintenu sur le bouton AI1 provoque la descente de la cabine. Si aucun bouton n’est actionné, la cabine est immobilisée. En cas d’action simultanée sur les boutons AI1 et AI5, la priorité est donnée à la descente. Si la cabine se situe au 5ème étage, elle ne peut plus monter et si elle se situe au 1er étage, elle ne peut plus descendre.
Action Cabine
Aucune action Aucun déplacement
Action maintenue sur AI5 Montée
Action maintenue sur AI1 Descente
Action sur AI1 si AI5 déjà maintenue Priorité à la descente
Action sur AI5 si AI1 déjà maintenue Pas de changement (descente)
Cabine au 5ème étage Arrêt (descente autorisée)
Cabine au 1ère étage Arrêt (montée autorisée)
Variables utilisées :
Variables Capteurs & Actionneurs Adresses Automate
Interrupteur Auto/Manu STOP I:3/29
Bouton - poussoir Cabine étage 1 AI1 I:3/13
Bouton - poussoir Cabine étage 5 AI5 I:3/17
Cabine au 1er étage D1 I:3/2
Cabine au 5ème étage D5 I:3/6
Montée KM1 O:1/7
Descente KM2 O:1/6
Grafcet :
4.2. Travail demandé
- Ecrire le programme correspondant au fonctionnement décrit précédemment en langage à contacts (LADDER, voir paragraphe 6) en utilisant la méthode par bit.
- Rentrer votre programme à l’aide du logiciel RSLogix500.

- 11 -
CING 2 N. VANDENBROUCKE
- Tester le fonctionnement sur la maquette.
5. Fonctionnement en ascenseur
Dans un premier temps, le fonctionnement automatique pourra être géré sur TROIS étages uniquement : 1 (rez-de-chaussée), 3 (milieu) et 5 (haut).
5.1. Mémorisation d'un appel
Nous souhaitons mémoriser les appels extérieur (AE1, AE2M, AE2D, AE3M, AE3D, AE4M, AE4D et AE5) ou intérieur (AI1, AI2, AI3, AI4 et AI5) de l'ascenseur. Nous calculons pour cela cinq variables (AM1, AM2, AM3, AM4 et AM5) qui permettent la mémorisation d'un appel à un étage. Pour simplifier l'étude de l'ascenseur, nous considérons les boutons du palier comme des boutons classiques (sans aucune indication de montée ou descente).
Il vous est demandé de convertir en langage à contact les 5 équations logiques (logique séquentielle) en fonction des boutons poussoirs d’appel extérieur présents sur les paliers, des boutons poussoirs d’appel intérieur présents dans la cabine et des capteurs de présence de cabine à l'étage.
Système séquentiel : un système est dit séquentiel, lorsque la ou les sorties dépendent de la combinaison des entrées et de l'état précédent des sorties.
AM1 : appel mémorisé pour l'étage N°1 => AM1= F(AE1, AI1, D1, AM1).
1D.1AM1AI1AE1AM
AM2 : appel mémorisé pour l'étage N°2 => AM2= F(AE2M, AE2D, AI2, D2, AM2).
2D.2AM2AID2AEM2AE2AM
AM3 : appel mémorisé pour l'étage N°3 => AM3= F(AE3M, AE3D, AI3, D3, AM3).
3D.3AM3AID3AEM3AE3AM
AM4 : appel mémorisé pour l'étage N°4 => AM4= F(AE4M, AE4D, AI4, D4, AM4).
4D.4AM4AID4AEM4AE4AM
AM5 : appel mémorisé pour l'étage N°5 => AM5= F(AE5, AI5, D5, AM5).
5D.5AM5AI5AE5AM
Une fois que l'opérateur appuie sur un bouton poussoir présent sur le palier ou à l'intérieur de la cabine la variable AMi passe à la valeur 1 et reste à un tant que la cabine n'est pas arrivée à l'étage demandé.
- Traduire les équations AM1, AM2, AM3, AM4 et AM5 en langage à contacts (LADDER).
- Rentrer votre programme à l’aide du logiciel RSLogix500.
- 12 -
CING 2 N. VANDENBROUCKE
- Tester le fonctionnement sur la maquette.
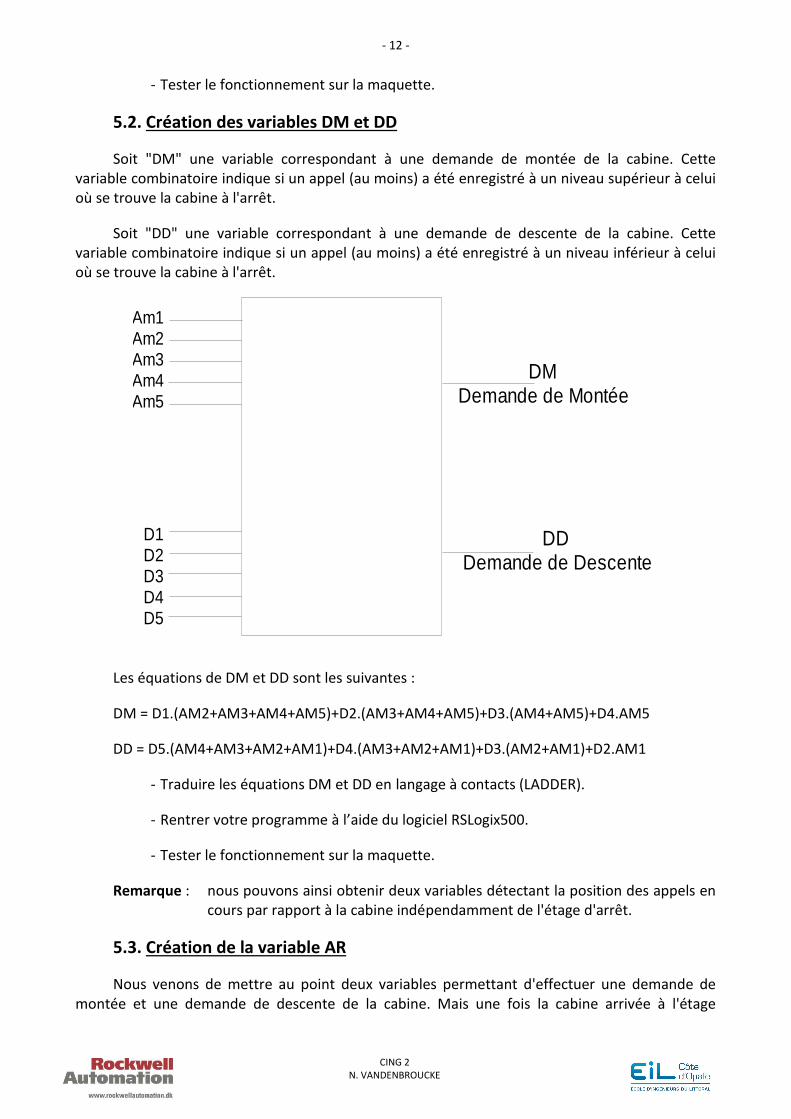
5.2. Création des variables DM et DD
Soit "DM" une variable correspondant à une demande de montée de la cabine. Cette variable combinatoire indique si un appel (au moins) a été enregistré à un niveau supérieur à celui où se trouve la cabine à l'arrêt.
Soit "DD" une variable correspondant à une demande de descente de la cabine. Cette variable combinatoire indique si un appel (au moins) a été enregistré à un niveau inférieur à celui où se trouve la cabine à l'arrêt.
DMDemande de Montée
DDDemande de Descente
Am1Am2Am3Am4Am5
D1D2D3D4D5
Les équations de DM et DD sont les suivantes :
DM = D1.(AM2+AM3+AM4+AM5)+D2.(AM3+AM4+AM5)+D3.(AM4+AM5)+D4.AM5
DD = D5.(AM4+AM3+AM2+AM1)+D4.(AM3+AM2+AM1)+D3.(AM2+AM1)+D2.AM1
- Traduire les équations DM et DD en langage à contacts (LADDER).
- Rentrer votre programme à l’aide du logiciel RSLogix500.
- Tester le fonctionnement sur la maquette.
Remarque : nous pouvons ainsi obtenir deux variables détectant la position des appels en cours par rapport à la cabine indépendamment de l'étage d'arrêt.
5.3. Création de la variable AR
Nous venons de mettre au point deux variables permettant d'effectuer une demande de montée et une demande de descente de la cabine. Mais une fois la cabine arrivée à l'étage

- 13 -
CING 2 N. VANDENBROUCKE
demandé il faut l'arrêter. Pour cela nous allons mettre au point une variable qui permet de demander l'arrêt de la cabine.
L'équation de AR est la suivante :
AR = AM1.D1+AM2.D2+AM3.D3+AM4.D4+AM5.D5
- Traduire l'équation de AR en langage à contacts (LADDER).
- Rentrer votre programme à l’aide du logiciel RSLogix500 (Attention : la programmation de AR doit être sur la première ligne du programme).
- Tester le fonctionnement sur la maquette.
5.4. Commande de l'ascenseur à l'aide d'un Grafcet
Pour fonctionner dans ce mode, l’interrupteur STOP doit être à 0 (mode automatique). En cas de demande de montée, la cabine doit monter jusqu’à atteindre l’étage appelé. En cas de demande de descente, la cabine doit descendre jusqu’à atteindre l’étage appelé. En cas de demande simultanée de montée et de descente, la priorité est donnée à la descente. Après être arrivée à un étage, la cabine doit attendre 3 secondes avant de pouvoir repartir. Enfin, l’afficheur doit afficher l’étage d’arrivée de la cabine.
A partir des trois variables de base DD, DM et AR nous pouvons effectuer la commande de l'ascenseur à partir du Grafcet suivant (priorité à la descente) :
- Donner les actions des étapes 3 et 4 en utilisant l’afficheur (sorties A8, A4, A2, A1).
- Ecrire ce Grafcet en langage à contacts (LADDER, voir paragraphe 6) en utilisant la méthode par mot.
- Compléter votre programme à l’aide du logiciel RSLogix500 en s’assurant d’écrire une équation par sortie et d’utiliser une temporisation par étape.
- Tester le fonctionnement sur la maquette.

- 14 -
CING 2 N. VANDENBROUCKE
- Compléter le programme du mode manuel afin de réinitialiser la mémorisation des appels.

- 15 -
CING 2 N. VANDENBROUCKE
6. Programmation du grafcet
La programmation du Grafcet devra faire apparaître 4 parties :
- Les équations de franchissabilité (FRA),
- Les équations de franchissement (FTR),
- L’initialisation (INI),
- Les actions (ACT).
6.1. Franchissabilité
Par exemple, une franchissabilité F0 liée à l’étape 0 et à la réceptivité r1 peut être écrite de la manière suivante.
Avec la méthode par bits :
X0 r1 F0
├─────┤ ├─────┤ ├────────────────────────────────────────────( )─────┤
Avec la méthode par mots :
┌ ┐ r1 F0
├───┤N=0 ?├─────┤ ├───────────────────────────────────────────( )─────┤
└─────┘
6.2. Franchissement
Par exemple, le franchissement d’une transition entre l’étape 0 et l’étape 1 selon une franchissabilité F0 peut être écrit de la manière suivante.
Avec la méthode par bits :
F0 X0
├─────┤ ├─────────────────────────────────────────────────────(R )─────┤
F0 X1
├─────┤ ├─────────────────────────────────────────────────────(S )─────┤
Avec la méthode par mots :
F0 ┌ ┐
├─────┤ ├────────────────────────────────────────────────────┤ N=1 ├───┤
└─────┘
6.3. Initialisation
L’initialisation du grafcet pourra être effectué grâce au bit système « First pass » (S:1/15) à 1 au début du premier cycle de l’automate.
Avec la méthode par bits :
S:1/15 X0
├─────┤ ├─────────────────────────────────────────────────────(S )─────┤

- 16 -
CING 2 N. VANDENBROUCKE
S:1/15 X1
├─────┤ ├─────────────────────────────────────────────────┬───(R )─────┤
│ X2 │
├───(R )─────┤
...
Avec la méthode par mots :
S:1/15 ┌ ┐
├─────┤ ├────────────────────────────────────────────────────┤ N=0 ├───┤
└─────┘
6.4. Actions
Par exemple, la mise à 1 d’une action A à partir de l’étape 1 peut être écrite de la manière suivante.
Avec la méthode par bits :
X1 A
├─────┤ ├─────────────────────────────────────────────────────( )─────┤
Avec la méthode par mots :
┌ ┐ A
├───┤N=1 ?├────────────────────────────────────────────────────( )─────┤
└─────┘
La mise à 1 d’une action conditionnelle A à partir de l’étape 1 selon la condition c peut être écrite de la manière suivante.
Avec la méthode par bits :
X1 c A
├─────┤ ├─────┤ ├────────────────────────────────────────────( )─────┤
Avec la méthode par mots :
┌ ┐ c A
├───┤N=1 ?├────┤ ├────────────────────────────────────────────( )─────┤
└─────┘
L’activation d’une action A liée à l’étape 1 peut être écrite de la manière suivante.
Avec la méthode par bits :
X1 A
├─────┤ ├─────────────────────────────────────────────────────(S )─────┤
Avec la méthode par mots :
┌ ┐ A
├───┤N=1 ?├────────────────────────────────────────────────────(S )─────┤
└─────┘
La désactivation d’une action A liée à l’étape 2 peut être écrite de la manière suivante.

- 17 -
CING 2 N. VANDENBROUCKE
Avec la méthode par bits :
X2 A
├─────┤ ├─────────────────────────────────────────────────────(R )─────┤
Avec la méthode par mots :
┌ ┐ A
├───┤N=2 ?├────────────────────────────────────────────────────(R )─────┤
└─────┘
6.5. Temporisations
Le déclenchement d’une temporisation à l’appel nécessite l’utilisation d’un bloc temporel de type TON dont la sortie EN est ensuite exploitée pour détecter la fin de la temporisation. Dans l’exemple ci-dessous, on utilise le bloc T4:0 (qu’il est possible de renommer) qui est déclenché par le passage à 1 de la variable va. Tant que la variable va reste à 1 et dès que la durée définie est écoulée, la sortie EN passe à 1. Pour régler cette durée, on détermine la base de temps (Time base) et l’unité (Preset). La sortie EN est alors utilisée comme variable temporelle :
│ ┌TON ┐ │
│ va │ │ │
├─────┤ ├───────────────────┤Timer T4:0├─(EN)───────────────────────┤
│ │Time Base 1├─(DN) │
│ │Preset 3│ │
│ │Accum 0│ │
│ │ │ │
└─────────────┘ │
T4:0
├─────┤ ├───── ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ┤
EN

- 18 -
CING 2 N. VANDENBROUCKE
TRAVAUX PRATIQUES D’AUTOMATISME
Cycle ingénieur – CING 2
Le logiciel RSLinx
- 19 -
CING 2 N. VANDENBROUCKE
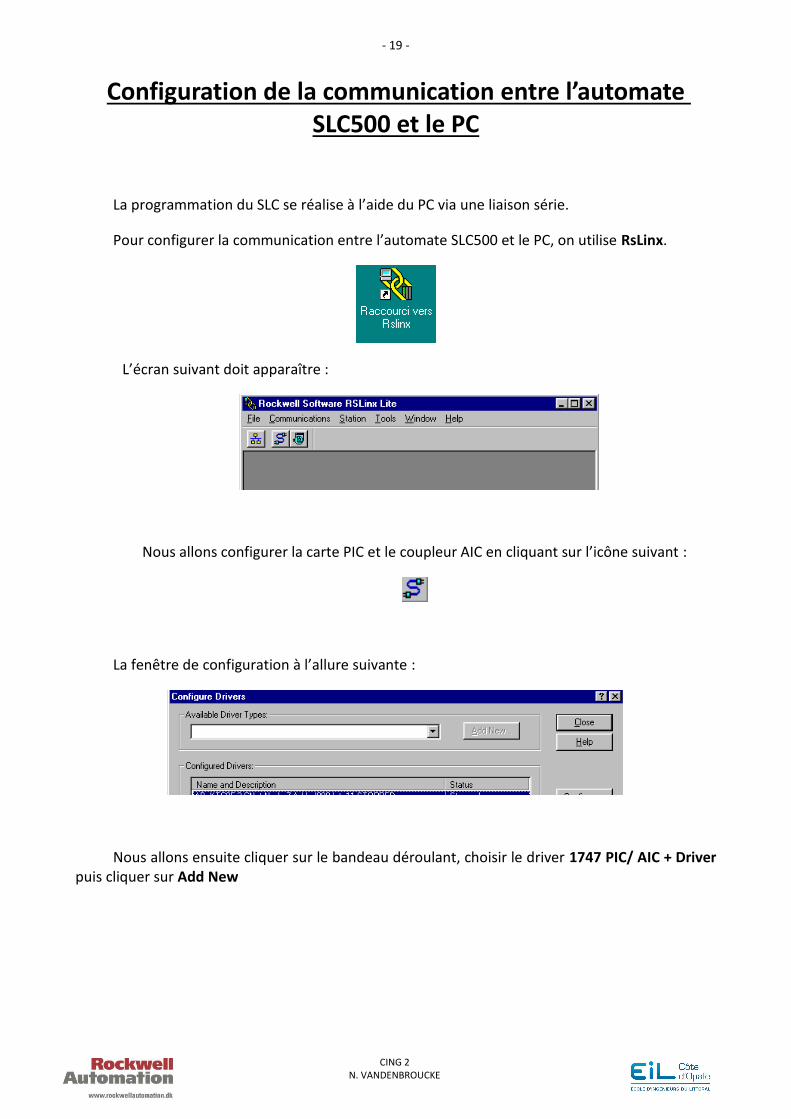
Configuration de la communication entre l’automate SLC500 et le PC
La programmation du SLC se réalise à l’aide du PC via une liaison série.
Pour configurer la communication entre l’automate SLC500 et le PC, on utilise RsLinx.
L’écran suivant doit apparaître :
Nous allons configurer la carte PIC et le coupleur AIC en cliquant sur l’icône suivant :
La fenêtre de configuration à l’allure suivante :
Nous allons ensuite cliquer sur le bandeau déroulant, choisir le driver 1747 PIC/ AIC + Driver puis cliquer sur Add New

- 20 -
CING 2 N. VANDENBROUCKE
La fenêtre suivante apparaît :
Après avoir nommé votre nouveau driver et cliquez sur OK, il faut définir ses propriétés. Les propriétés du driver sont définies dans la fenêtre suivante :
- 21 -
CING 2 N. VANDENBROUCKE
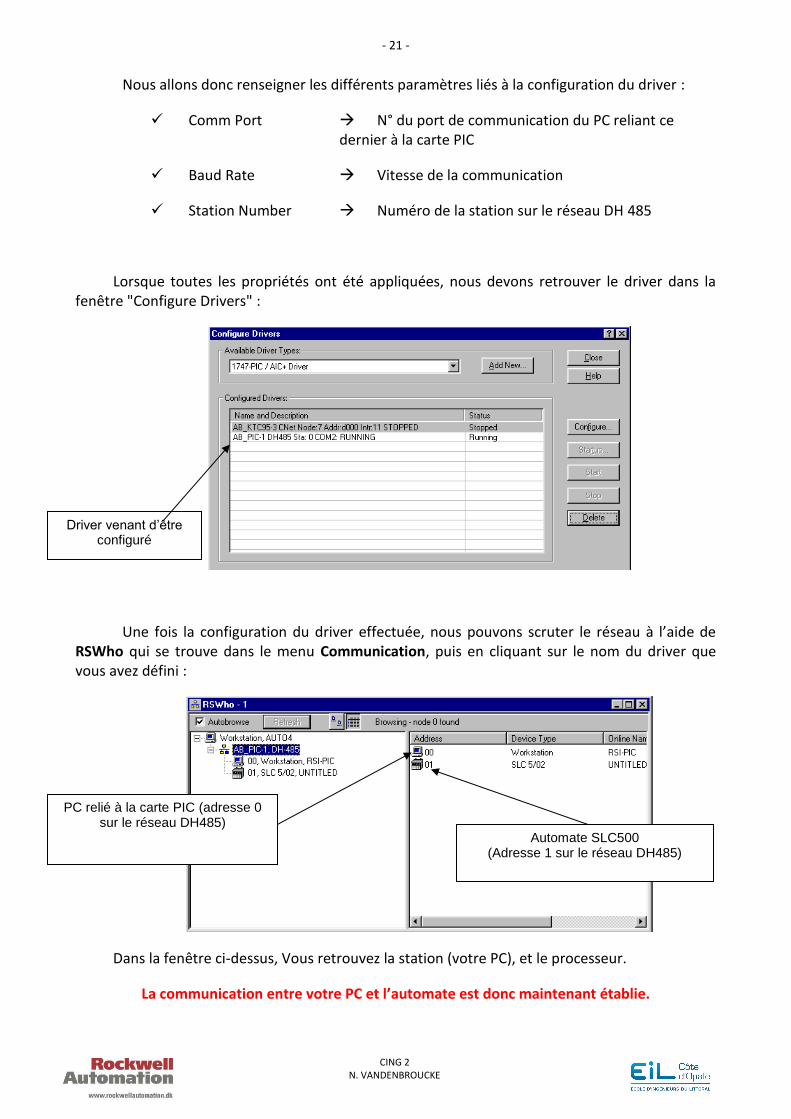
Nous allons donc renseigner les différents paramètres liés à la configuration du driver :
Comm Port N° du port de communication du PC reliant ce dernier à la carte PIC
Baud Rate Vitesse de la communication
Station Number Numéro de la station sur le réseau DH 485
Lorsque toutes les propriétés ont été appliquées, nous devons retrouver le driver dans la fenêtre "Configure Drivers" :
Une fois la configuration du driver effectuée, nous pouvons scruter le réseau à l’aide de RSWho qui se trouve dans le menu Communication, puis en cliquant sur le nom du driver que vous avez défini :
Dans la fenêtre ci-dessus, Vous retrouvez la station (votre PC), et le processeur.
La communication entre votre PC et l’automate est donc maintenant établie.
Driver venant d’être configuré
PC relié à la carte PIC (adresse 0 sur le réseau DH485)
Automate SLC500 (Adresse 1 sur le réseau DH485)

- 22 -
CING 2 N. VANDENBROUCKE
TRAVAUX PRATIQUES D’AUTOMATISME
Cycle ingénieur – CING 2
Le logiciel RSLogix500
Notice de développement d’un projet avec RSLogix500

- 23 -
CING 2 N. VANDENBROUCKE
1. Démarrage du logiciel RSLogix500
1ère solution : utiliser l’icône raccourcie vers RSLogix5
2ème solution :
- Cliquez sur le bouton Démarrer de la barre des tâches
- Faites glisser la souris jusqu’à l’option Programmes
- Faites glisser la souris jusqu’à l’option Rockwell Software
- Cliquez sur l’option RS500
2. Ouvrir un nouveau projet
- Ouvrir un nouveau projet en cliquant sur l’icône suivant :
3. Définir le type de processeur
Nom du processeur
Type de processeur
Icône "Nouveau projet"

- 24 -
CING 2 N. VANDENBROUCKE
Une fois le logiciel ouvert et le type de processeur défini, l’écran suivant apparaît :
La fenêtre projet vous permet de voir l’ensemble de votre configuration :
- Configuration automate,
- Fichiers programmes,
- Fichiers de données,
- Fichier de forçage d’E/S,
- Fenêtres de surveillance de données,
- Base de données adresses/symboles.
La fenêtre programme vous permet d’écrire/visualiser le fichier programme sélectionné.
La barre d’outils vous permet de sélectionner les instructions par type.
Le tableau de commande vous permet de visualiser la connexion et l’état de votre automate.
4. Configuration du châssis
Tableau de commande Barre d’outils
Fenêtre de programme Fenêtre de projet
- 25 -
CING 2 N. VANDENBROUCKE
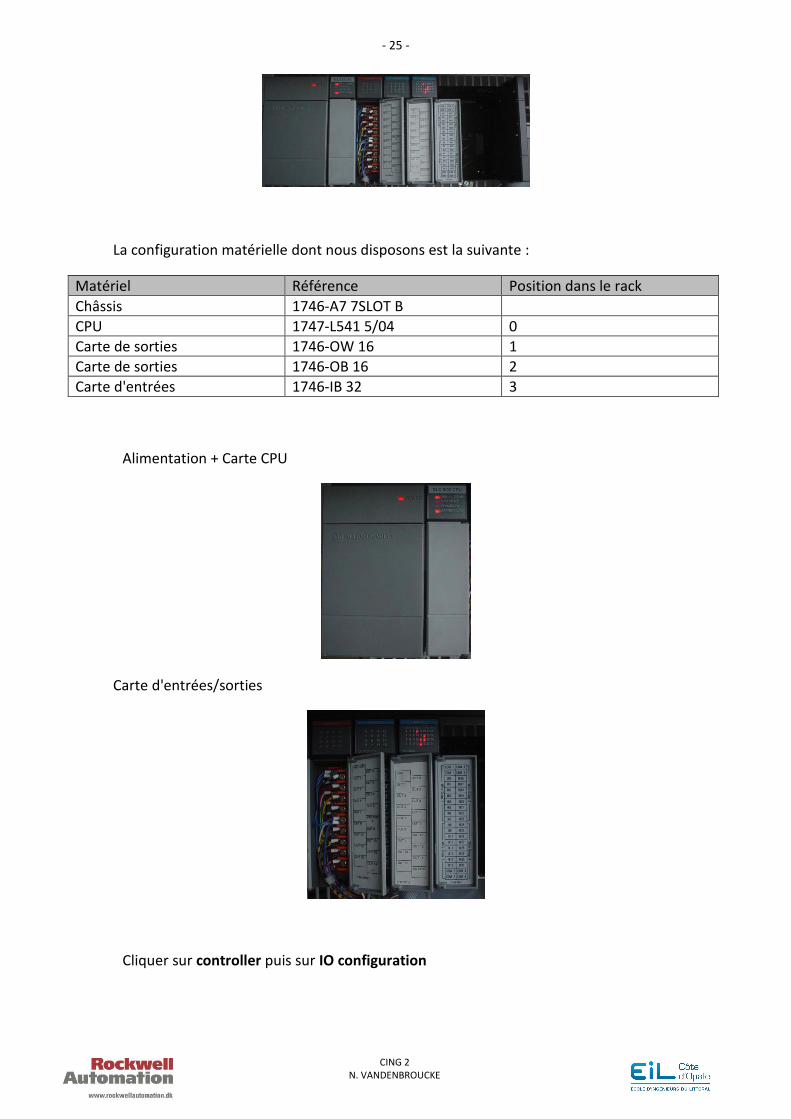
La configuration matérielle dont nous disposons est la suivante :
Matériel Référence Position dans le rack
Châssis 1746-A7 7SLOT B
CPU 1747-L541 5/04 0
Carte de sorties 1746-OW 16 1
Carte de sorties 1746-OB 16 2
Carte d'entrées 1746-IB 32 3
Alimentation + Carte CPU
Carte d'entrées/sorties
Cliquer sur controller puis sur IO configuration

- 26 -
CING 2 N. VANDENBROUCKE
Un tableau comme celui ci-dessous apparaît :
Les cartes présentes sur le châssis doivent être configurées dans ce tableau. En face de chaque numéro (0 à 6) doit figurer la référence et la description de la carte présente à l’emplacement correspondant au numéro.
5. Communication entre l’automate et le logiciel de programmation
En considérant que le driver (ou carte de communication) réalisant la communication entre l’automate programmable et le PC est convenablement configurée, la communication peut alors être lancée en cliquant sur le menu "Comms" puis sur "Who active go on line".
Choix du châssis
Slot du SLC500
Lecture automatique de la configuration. Uniquement à partir du SLC500/04.
Type d’alimentation
- 27 -
CING 2 N. VANDENBROUCKE
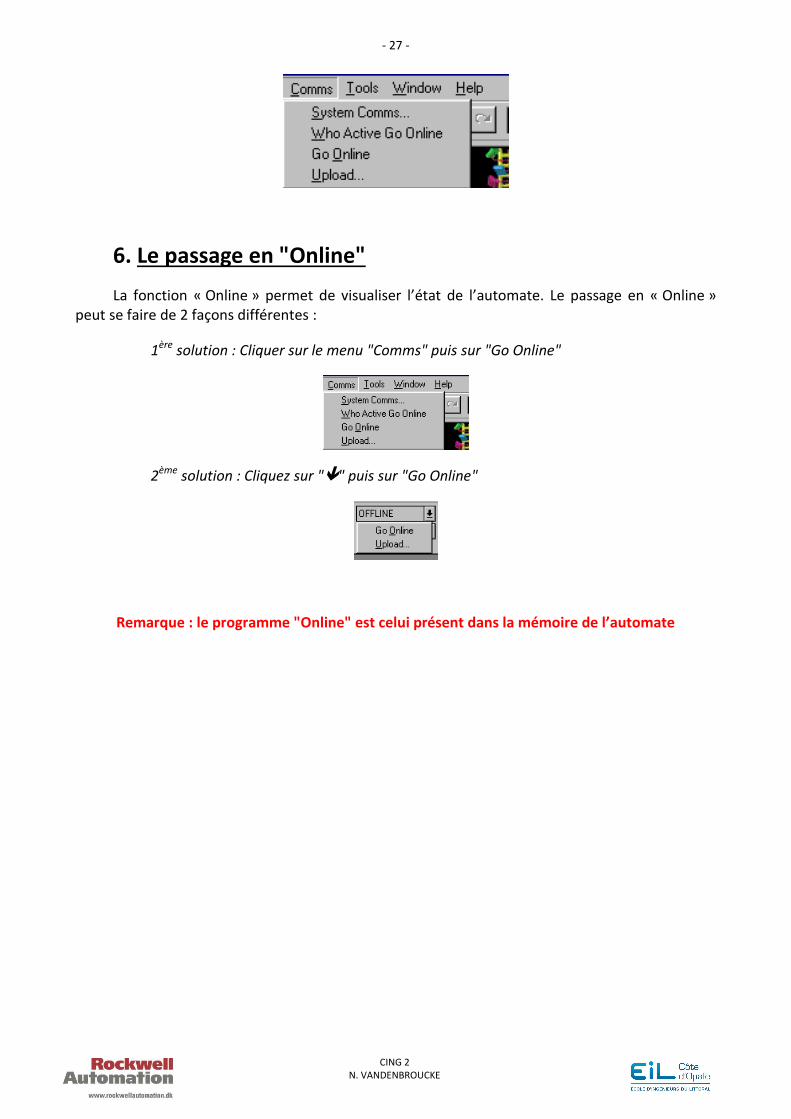
6. Le passage en "Online"
La fonction « Online » permet de visualiser l’état de l’automate. Le passage en « Online » peut se faire de 2 façons différentes :
1ère solution : Cliquer sur le menu "Comms" puis sur "Go Online"
2ème solution : Cliquez sur "" puis sur "Go Online"
Remarque : le programme "Online" est celui présent dans la mémoire de l’automate

- 28 -
CING 2 N. VANDENBROUCKE
7. Le passage en "Offline"
Le passage de l’automate de « Online » à « Offline » peut se faire de 2 façons différentes :
1ère solution : Cliquer sur le menu "Comms" puis sur "Go Offline"
2ème solution : Cliquez sur "" puis sur "Go Offline"
Remarque : le programme "Offline" est celui présent dans le PC
8. Le forçage des entrées et des sorties
8.1. Le forçage des sorties
Cliquez sur Force File puis sur O0- OUTPUT
Dans le tableau suivant, choisissez la sortie automate que vous voulez forcer puis remplacez le point "." par la "1" ou "0" :

- 29 -
CING 2 N. VANDENBROUCKE
Exemple : Dans le tableau ci-dessus la sortie O :1/4 à été forcé à "1".
Cliquez ensuite sur :
La fenêtre ci-dessous apparaît alors
Répondre oui : les sorties automates sélectionnées sont immédiatement forcées.
ATTENTION : LES SORTIES DES CARTES ÉTANT ACTIVES, IL S'AGIT DE S'ASSURER DE LA SÉCURITÉ
DU PERSONNEL ET DU BON FONCTIONNEMENT DE LA MACHINE AVANT D'EFFECTUER TOUT FORÇAGE DES SORTIES.
Pour annuler le forçage :
1ère méthode : dans le tableau Data File O0 (bin) – OUTPUT Forces, cliquez sur :
2ème méthode : Cliquez sur "" puis sur "Remove All Forces"
8.2. Le forçage des entrées
Cliquez sur Force File puis sur I0- INPUT
- 30 -
CING 2 N. VANDENBROUCKE
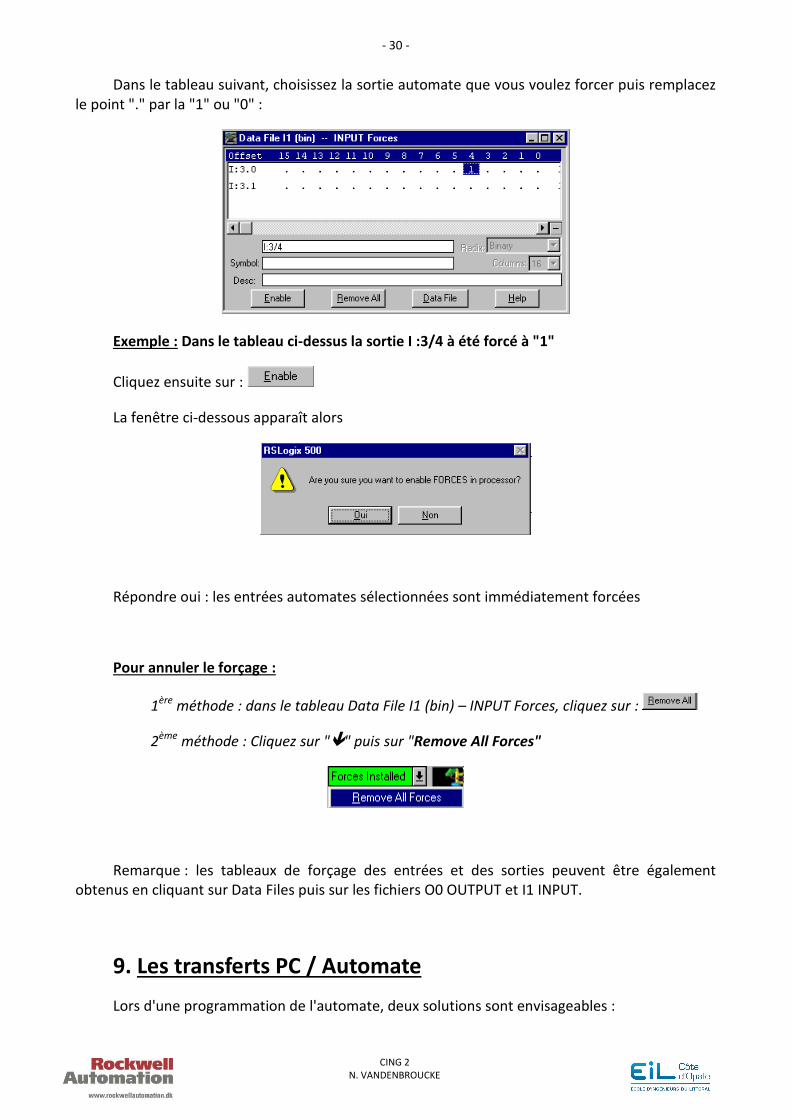
Dans le tableau suivant, choisissez la sortie automate que vous voulez forcer puis remplacez le point "." par la "1" ou "0" :
Exemple : Dans le tableau ci-dessus la sortie I :3/4 à été forcé à "1"
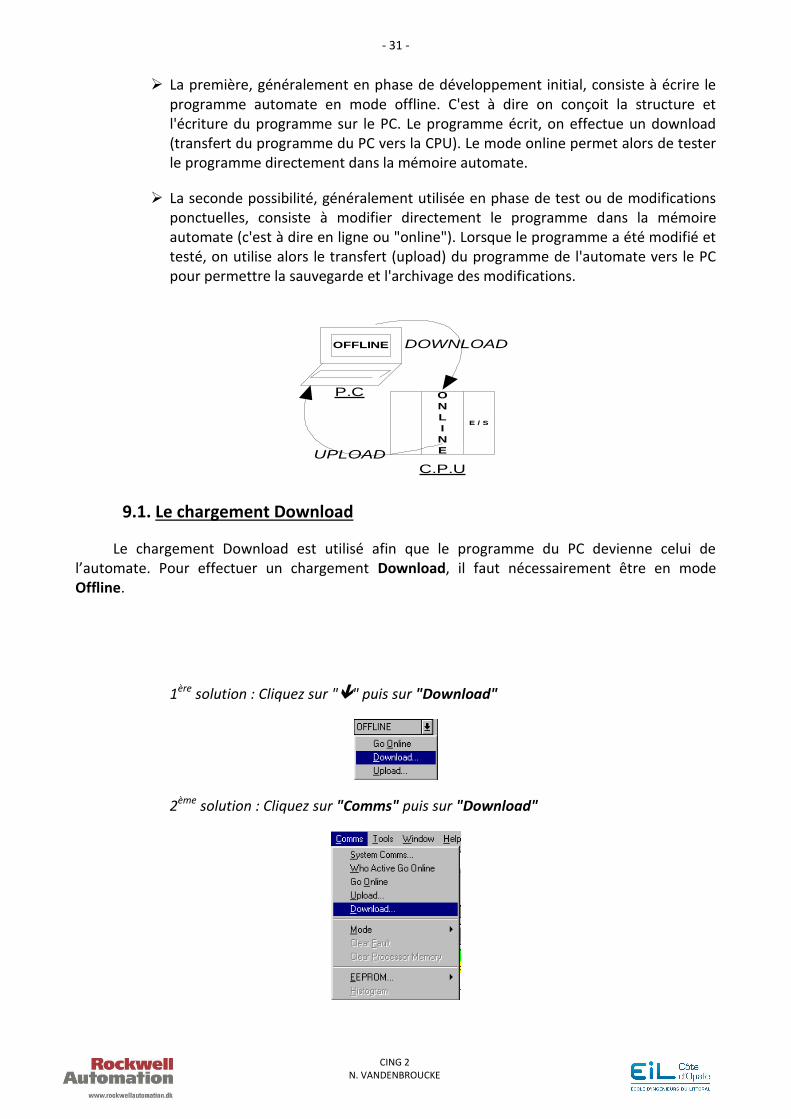
Cliquez ensuite sur :
La fenêtre ci-dessous apparaît alors
Répondre oui : les entrées automates sélectionnées sont immédiatement forcées
Pour annuler le forçage :
1ère méthode : dans le tableau Data File I1 (bin) – INPUT Forces, cliquez sur :
2ème méthode : Cliquez sur "" puis sur "Remove All Forces"
Remarque : les tableaux de forçage des entrées et des sorties peuvent être également obtenus en cliquant sur Data Files puis sur les fichiers O0 OUTPUT et I1 INPUT.
9. Les transferts PC / Automate
Lors d'une programmation de l'automate, deux solutions sont envisageables :
- 31 -
CING 2 N. VANDENBROUCKE
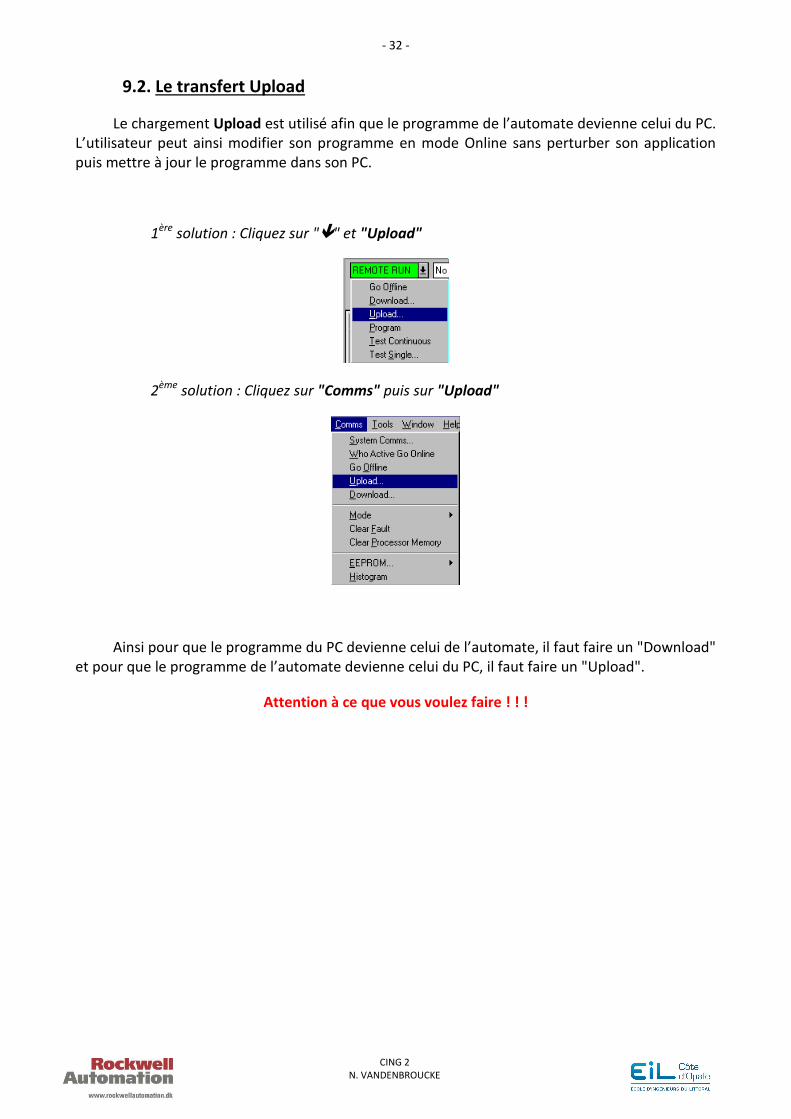
La première, généralement en phase de développement initial, consiste à écrire le programme automate en mode offline. C'est à dire on conçoit la structure et l'écriture du programme sur le PC. Le programme écrit, on effectue un download (transfert du programme du PC vers la CPU). Le mode online permet alors de tester le programme directement dans la mémoire automate.
La seconde possibilité, généralement utilisée en phase de test ou de modifications ponctuelles, consiste à modifier directement le programme dans la mémoire automate (c'est à dire en ligne ou "online"). Lorsque le programme a été modifié et testé, on utilise alors le transfert (upload) du programme de l'automate vers le PC pour permettre la sauvegarde et l'archivage des modifications.
OFFLINE
P.C O
N
L
I
N
E
E / S
C.P.U
DOWNLOAD
UPLOAD
9.1. Le chargement Download
Le chargement Download est utilisé afin que le programme du PC devienne celui de l’automate. Pour effectuer un chargement Download, il faut nécessairement être en mode Offline.
1ère solution : Cliquez sur "" puis sur "Download"
2ème solution : Cliquez sur "Comms" puis sur "Download"
- 32 -
CING 2 N. VANDENBROUCKE
9.2. Le transfert Upload
Le chargement Upload est utilisé afin que le programme de l’automate devienne celui du PC. L’utilisateur peut ainsi modifier son programme en mode Online sans perturber son application puis mettre à jour le programme dans son PC.
1ère solution : Cliquez sur "" et "Upload"
2ème solution : Cliquez sur "Comms" puis sur "Upload"
Ainsi pour que le programme du PC devienne celui de l’automate, il faut faire un "Download" et pour que le programme de l’automate devienne celui du PC, il faut faire un "Upload".
Attention à ce que vous voulez faire ! ! !