C.Q.F.S. d’automatisme FIN DE CYCLE BTS M.I.jm.bousquet.icbf.free.fr/DS TS2/TS2-IC3_CQFS.pdf · -...
26
1 C.Q.F.S. d’automatisme FIN DE CYCLE BTS M.I. ************** A COMPLETER EN REVISANT LE COURS
Transcript of C.Q.F.S. d’automatisme FIN DE CYCLE BTS M.I.jm.bousquet.icbf.free.fr/DS TS2/TS2-IC3_CQFS.pdf · -...

1
C.Q.F.S. d’automatisme
FIN DE CYCLE BTS M.I.
**************
A COMPLETER EN REVISANT LE COURS
2
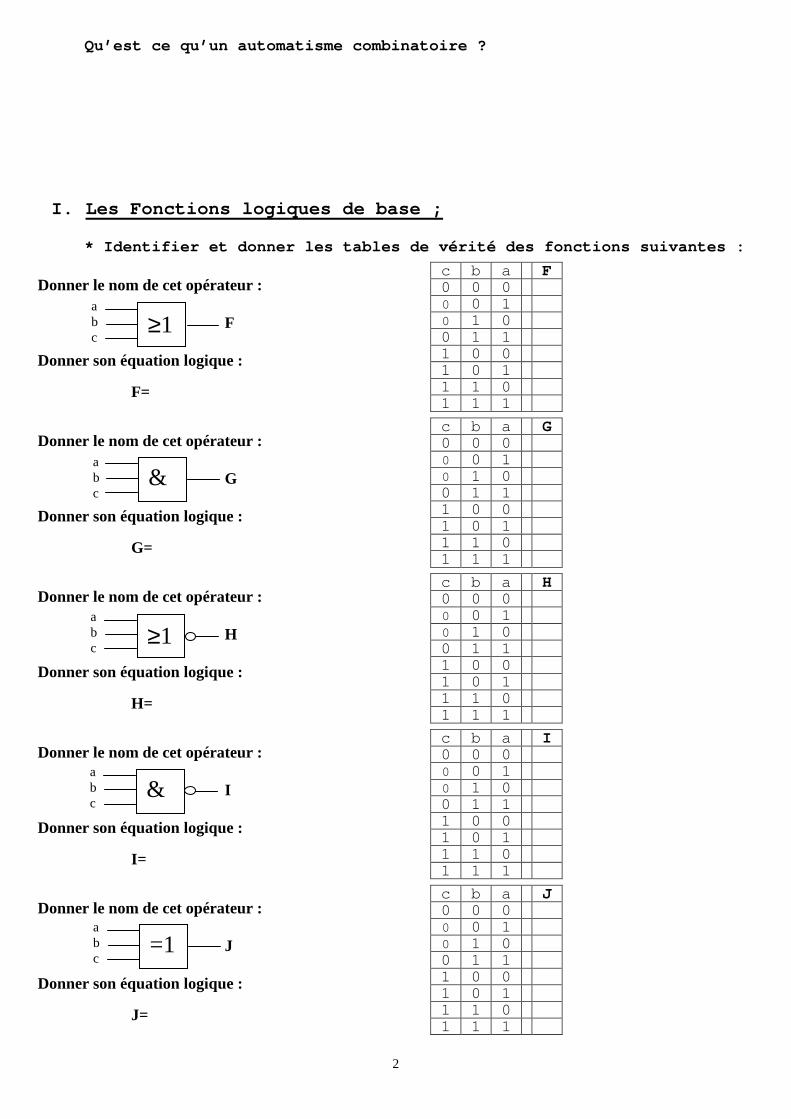
Qu’est ce qu’un automatisme combinatoire ?
I. Les Fonctions logiques de base ; * Identifier et donner les tables de vérité des fo nctions suivantes : Donner le nom de cet opérateur :
F Donner son équation logique :
F=
c b a F 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
Donner le nom de cet opérateur :
G Donner son équation logique :
G=
c b a G 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
Donner le nom de cet opérateur :
H Donner son équation logique :
H=
c b a H 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
Donner le nom de cet opérateur :
I Donner son équation logique :
I=
c b a I 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
Donner le nom de cet opérateur :
J Donner son équation logique :
J=
c b a J 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
=1
a b c
&
a b c
&
a b c
≥1 a b c
a b c
≥1
3
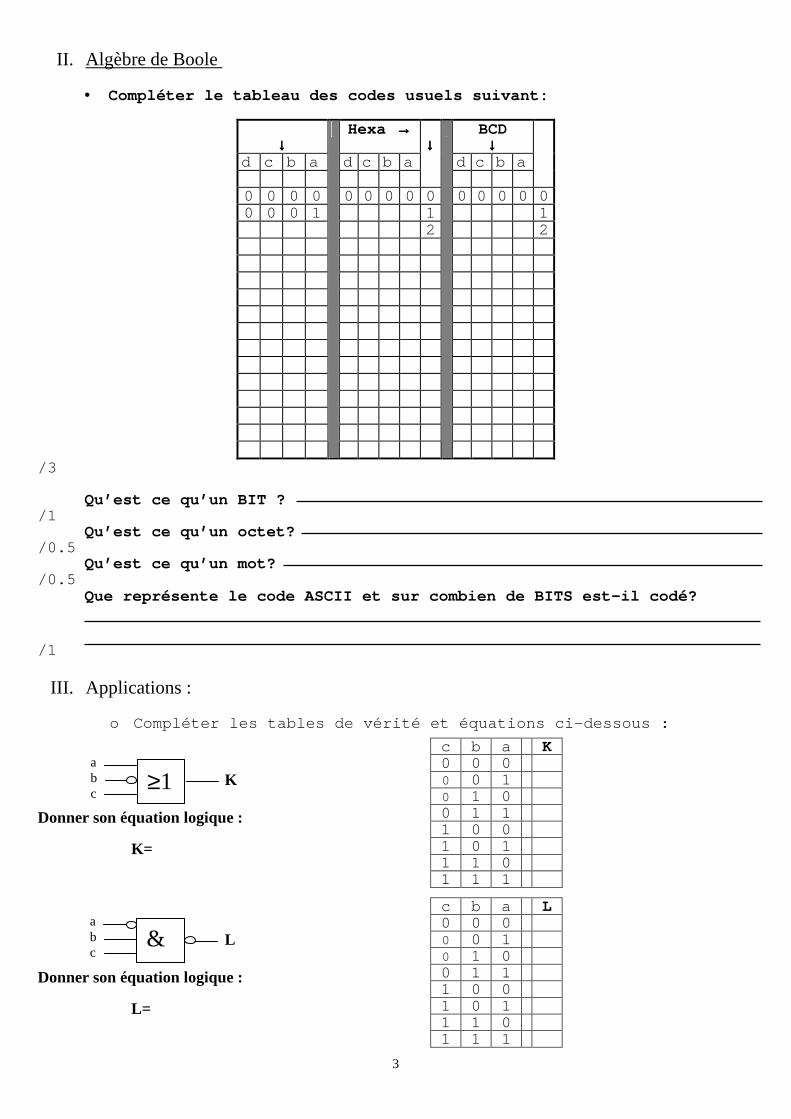
II. Algèbre de Boole
• Compléter le tableau des codes usuels suivant:
↓↓↓↓
Hexa →→→→ BCD ↓↓↓↓
d c b a d c b a d c b a
↓↓↓↓
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 2 2
/3
Qu’est ce qu’un BIT ?
/1 Qu’est ce qu’un octet?
/0.5 Qu’est ce qu’un mot?
/0.5 Que représente le code ASCII et sur combien de BITS est-il codé?
/1
III. Applications :
o Compléter les tables de vérité et équations ci-dess ous :
K Donner son équation logique :
K=
c b a K 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
L Donner son équation logique :
L=
c b a L 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
&
a b c
≥1 a b c
4
- Convertir les nombres suivants dans les bases ou co dage demandé:
1011111001 (2) → (10)
→ (16)
323 (10) → (2)
→ (16)
675 (10) → (BCD)
5
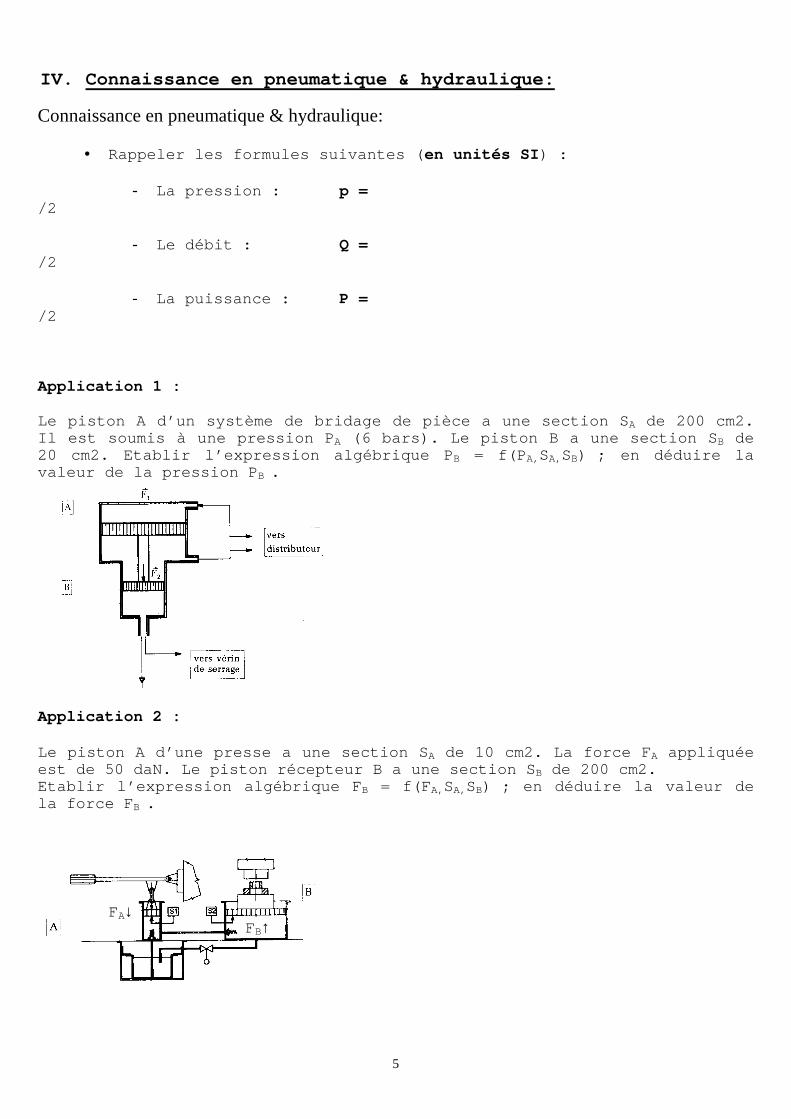
IV. Connaissance en pneumatique & hydraulique: Connaissance en pneumatique & hydraulique:
• Rappeler les formules suivantes (en unités SI ) :
- La pression : p = /2
- Le débit : Q = /2
- La puissance : P = /2 Application 1 :
Le piston A d’un système de bridage de pièce a une section S A de 200 cm2. Il est soumis à une pression P A (6 bars). Le piston B a une section S B de 20 cm2. Etablir l’expression algébrique P B = f(P A, SA, SB) ; en déduire la valeur de la pression P B .
Application 2 : Le piston A d’une presse a une section S A de 10 cm2. La force F A appliquée est de 50 daN. Le piston récepteur B a une section SB de 200 cm2. Etablir l’expression algébrique F B = f(F A, SA, SB) ; en déduire la valeur de la force F B .
FA↓
FB↑
6
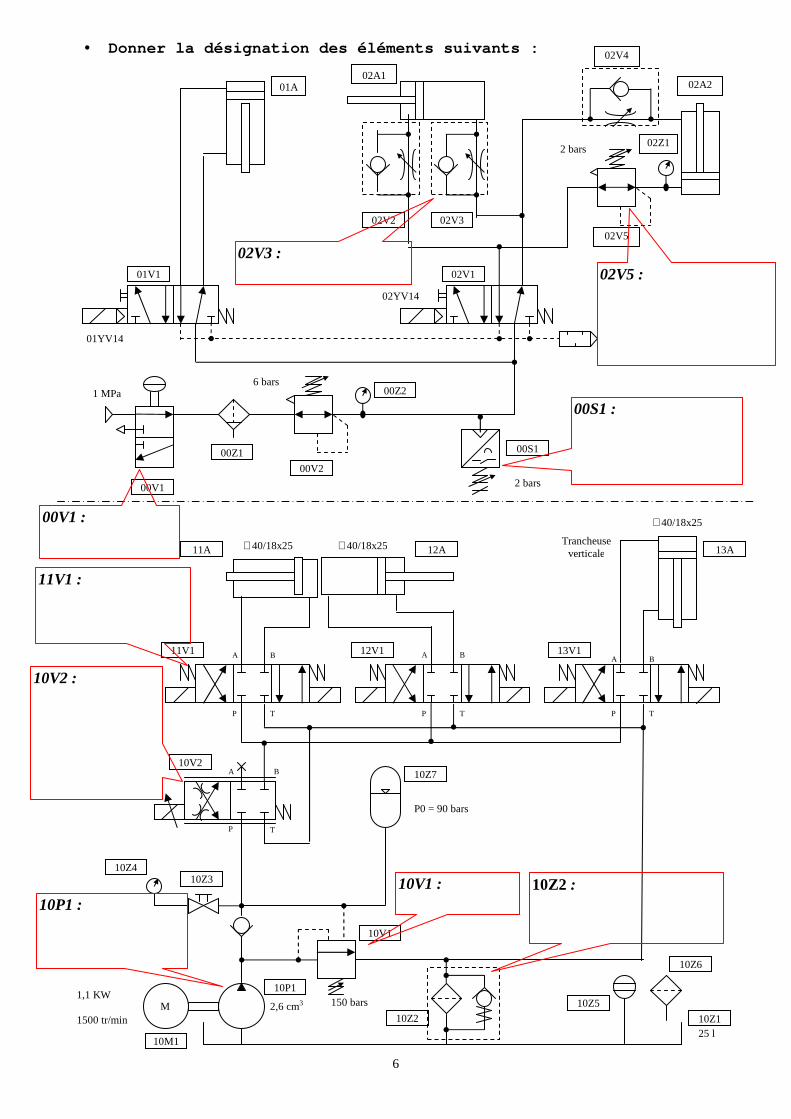
• Donner la désignation des éléments suivants :
02Z1
02V5
02A2
02V4
02V3 02V2
01A
01YV14
02YV14
1 MPa 6 bars
2 bars
Trancheuse verticale
A B
P T
A B A B
P T P T
A B
P T
2,6 cm3 M
25 l
02A1
2 bars
∅40/18x25 ∅40/18x25
∅40/18x25
P0 = 90 bars
150 bars 1,1 KW 1500 tr/min
02V1 01V1
00V1
00V2
00Z1 00S1
00Z2
11A 12A 13A
11V1 12V1 13V1
10V2 10Z7
10Z4 10Z3
10V1
10M1
10P1
10Z2
10Z5
10Z6
10Z1
10Z2 :
11V1 :
10P1 :
10V1 :
00V1 :
00S1 :
02V5 :
10V2 :
02V3 :
7
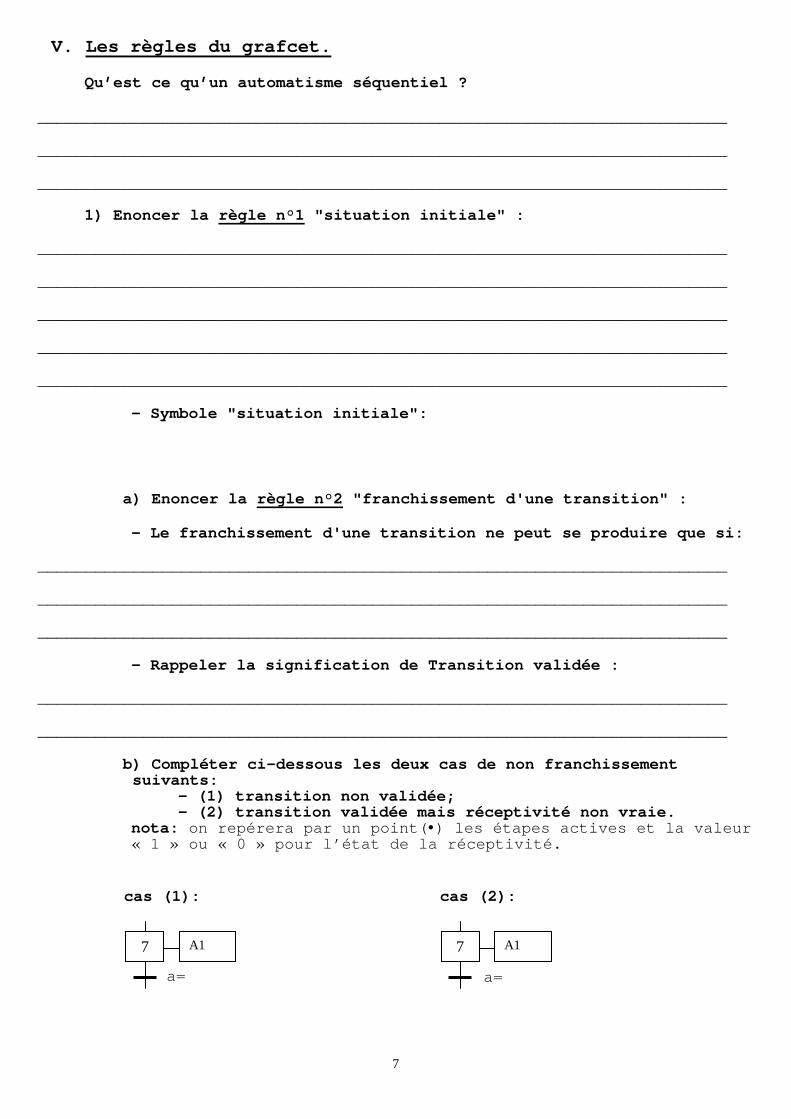
V. Les règles du grafcet. Qu’est ce qu’un automatisme séquentiel ?
___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________
1) Enoncer la règle n°1 "situation initiale" : ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ - Symbole "situation initiale": a) Enoncer la règle n°2 "franchissement d'une transition" : - Le franchissement d'une transition ne peut se p roduire que si: ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ - Rappeler la signification de Transition validée : ___________________________________________________ _____________________ ___________________________________________________ _____________________ b) Compléter ci-dessous les deux cas de non fr anchissement suivants: - (1) transition non validée; - (2) transition validée mais réceptivité non vr aie.
nota: on repérera par un point( •) les étapes actives et la valeur « 1 » ou « 0 » pour l’état de la réceptivité.
cas (1): cas (2):
7 A1
a=
7 A1
a=
8
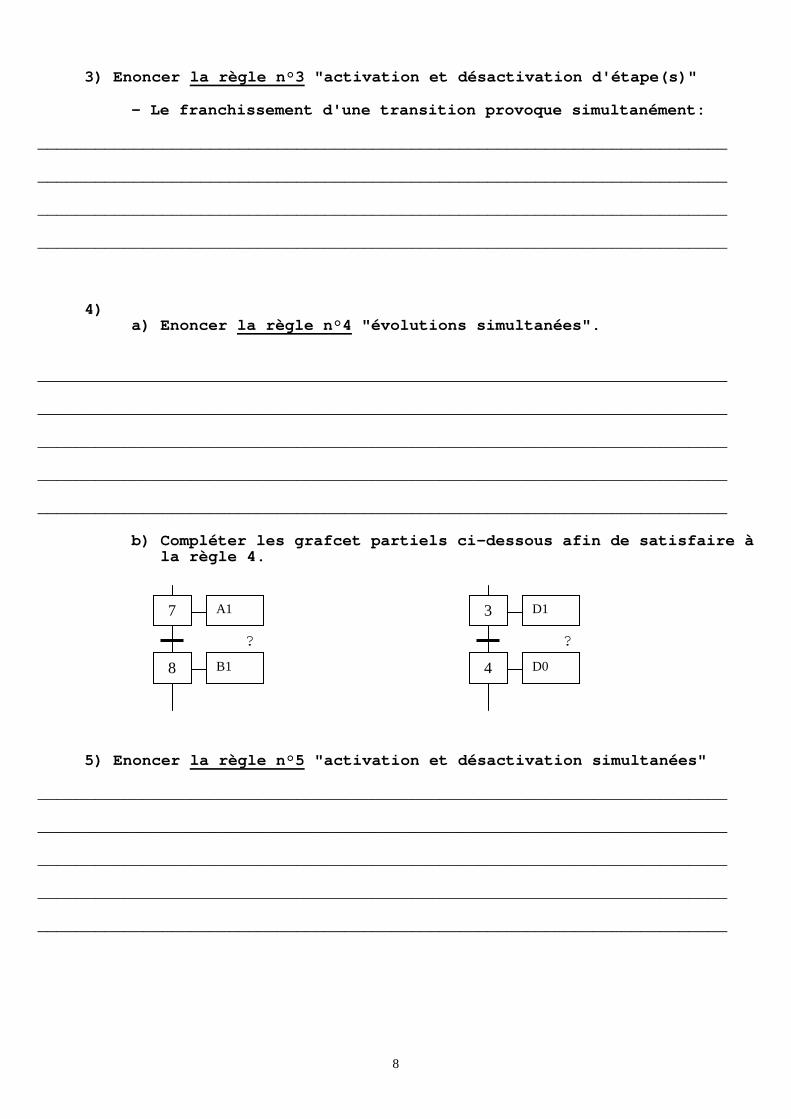
3) Enoncer la règle n°3 "activation et désactivation d'étape(s)" - Le franchissement d'une transition provoque sim ultanément: ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ 4)
a) Enoncer la règle n°4 "évolutions simultanées".
___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________
b) Compléter les grafcet partiels ci-dessous afin de s atisfaire à la règle 4.
? ? 5) Enoncer la règle n°5 "activation et désactivation simultanées" ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________ ___________________________________________________ _____________________
7 A1
8 B1
3 D1
4 D0
9
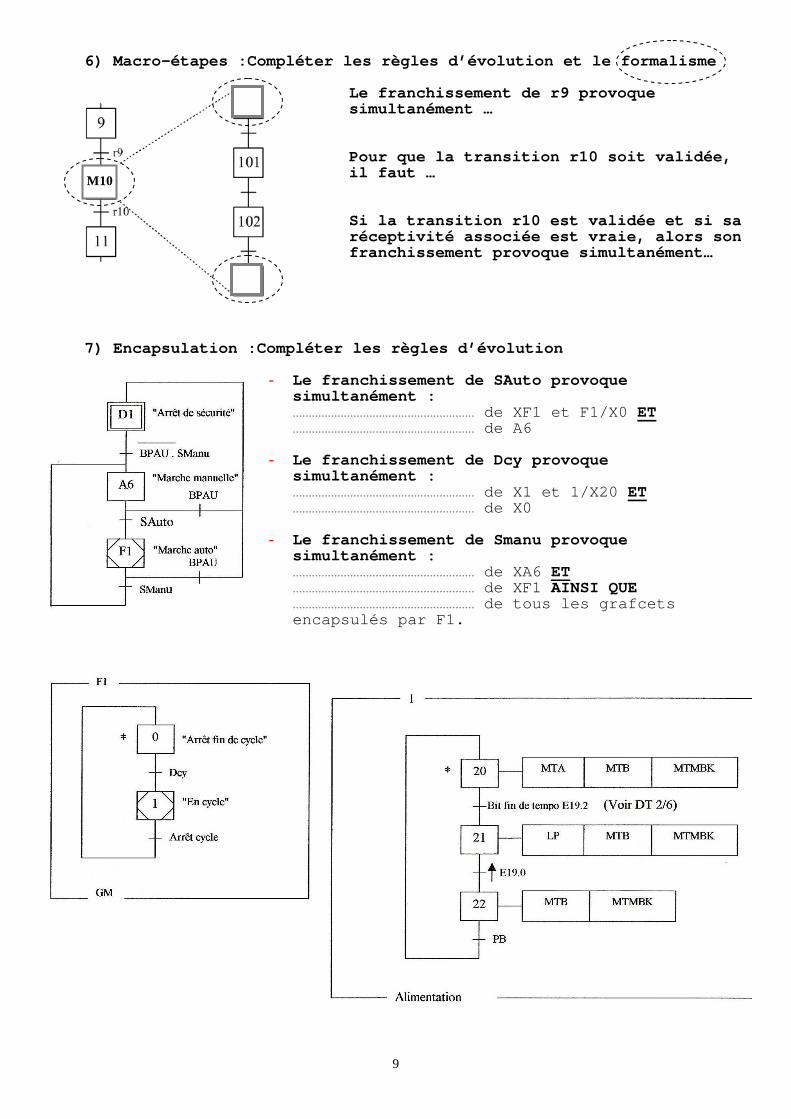
6) Macro-étapes :Compléter les règles d’évolution e t le formalisme
- Le franchissement de r9 provoque
simultanément … l’activation de M10 et E10 ET la désactivation de X9
- Pour que la transition r10 soit validée,
il faut … que M10 ET S10 soient actives - Si la transition r10 est validée et si sa
réceptivité associée est vraie, alors son franchissement provoque simultanément… l’activation de X11 ET la désactivation de M10 et S10
7) Encapsulation :Compléter les règles d’évolution
- Le franchissement de SAuto provoque simultanément : ………………………………………………… de XF1 et F1/X0 ET ………………………………………………… de A6
- Le franchissement de Dcy provoque
simultanément : ………………………………………………… de X1 et 1/X20 ET ………………………………………………… de X0
- Le franchissement de Smanu provoque
simultanément : ………………………………………………… de XA6 ET ………………………………………………… de XF1 AINSI QUE ………………………………………………… de tous les grafcets encapsulés par F1.
M10
10
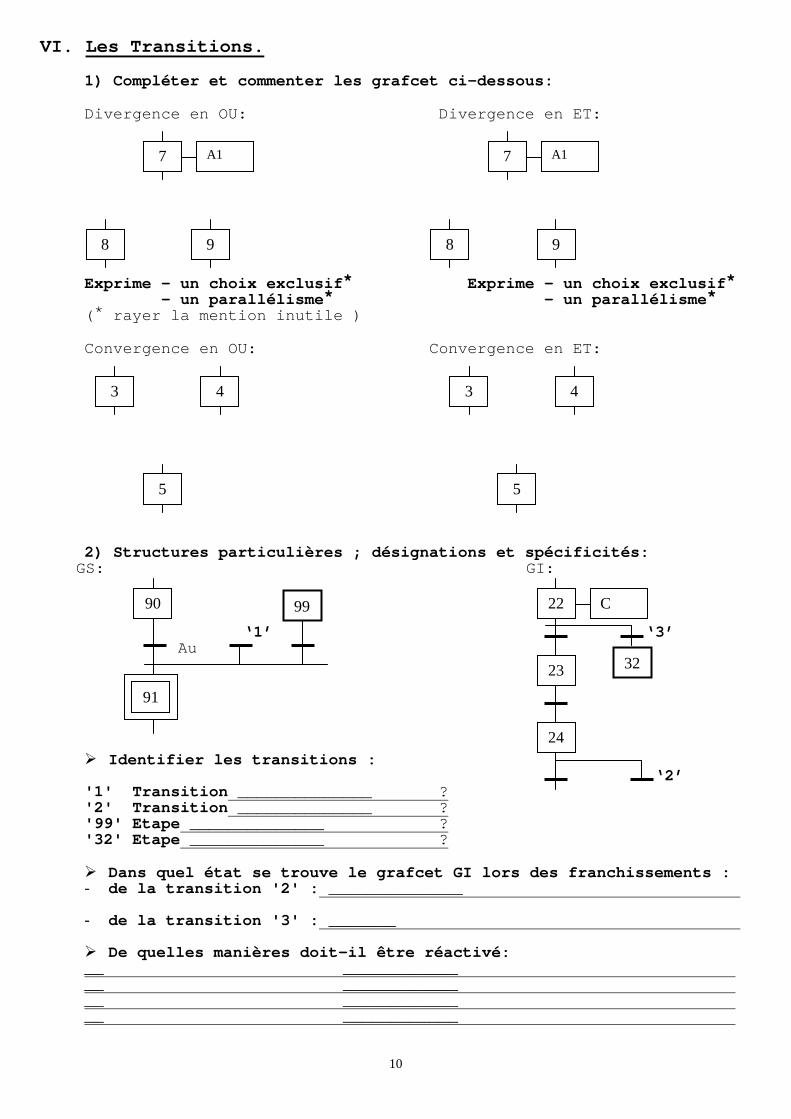
VI. Les Transitions. 1) Compléter et commenter les grafcet ci-dessous:
Divergence en OU: Divergence en ET:
Exprime - un choix exclusif * Exprime - un choix exclusif * - un parallélisme * - un parallélisme * ( * rayer la mention inutile )
Convergence en OU: Convergence en ET:
2) Structures particulières ; désignations et spéc ificités: GS: GI: ‘1’ ‘3’ Au
� Identifier les transitions : ‘2’
'1' Transition ______________ ? '2' Transition ______________ ? '99' Etape ______________ ? '32' Etape ______________ ?
� Dans quel état se trouve le grafcet GI lors des fra nchissements : - de la transition '2' : ______________ . - de la transition '3' : _______ .
� De quelles manières doit-il être réactivé: __ ____________ . __ ____________ . __ ____________ . __ ____________ .
7 A1
8 9
7 A1
8 9
3 4
5
3 4
5
91
90 22 C
23
24
99
32
11
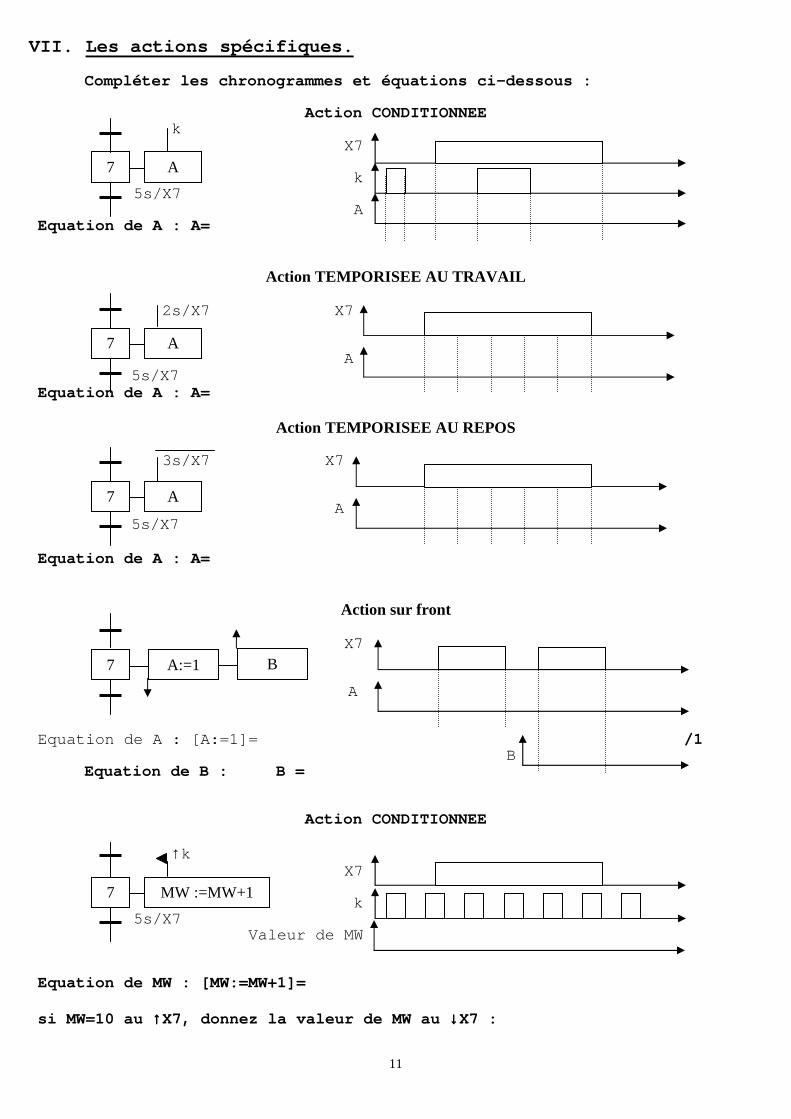
VII. Les actions spécifiques. Compléter les chronogrammes et équations ci-dessou s :
Action CONDITIONNEE k X7 k 5s/X7 A Equation de A : A=
Action TEMPORISEE AU TRAVAIL 2s/X7 X7 A 5s/X7 Equation de A : A=
Action TEMPORISEE AU REPOS
3s/X7 X7 A 5s/X7 Equation de A : A=
Action sur front X7 A Equation de A : [A:=1]= /1
B Equation de B : B =
Action CONDITIONNEE
↑k X7 k 5s/X7 Valeur de MW
Equation de MW : [MW:=MW+1]=
si MW=10 au ↑↑↑↑X7, donnez la valeur de MW au ↓↓↓↓X7 :
7 A
7 A
7 A
7 A:=1 B
7 MW :=MW+1
12
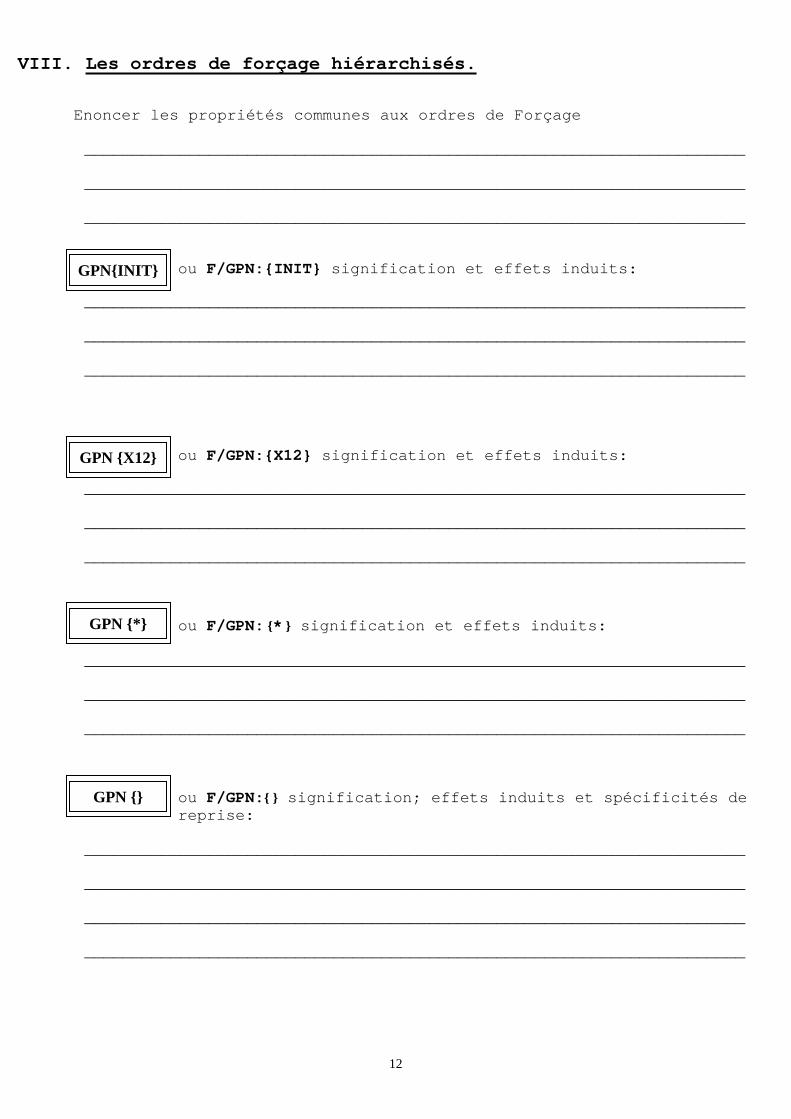
VIII. Les ordres de forçage hiérarchisés.
Enoncer les propriétés communes aux ordres de Força ge ___________________________________________________ __________________
___________________________________________________ __________________
___________________________________________________ __________________
ou F/GPN:{INIT} signification et effets induits: ___________________________________________________ __________________ ___________________________________________________ __________________
___________________________________________________ __________________
ou F/GPN:{X12} signification et effets induits: ___________________________________________________ __________________ ___________________________________________________ __________________
___________________________________________________ __________________
ou F/GPN: {* } signification et effets induits: ___________________________________________________ __________________ ___________________________________________________ __________________
___________________________________________________ __________________
ou F/GPN: { } signification; effets induits et spécificités de reprise:
___________________________________________________ __________________ ___________________________________________________ __________________
___________________________________________________ __________________ ___________________________________________________ __________________
GPN{INIT}
GPN {X12}
GPN {*}
GPN {}
13
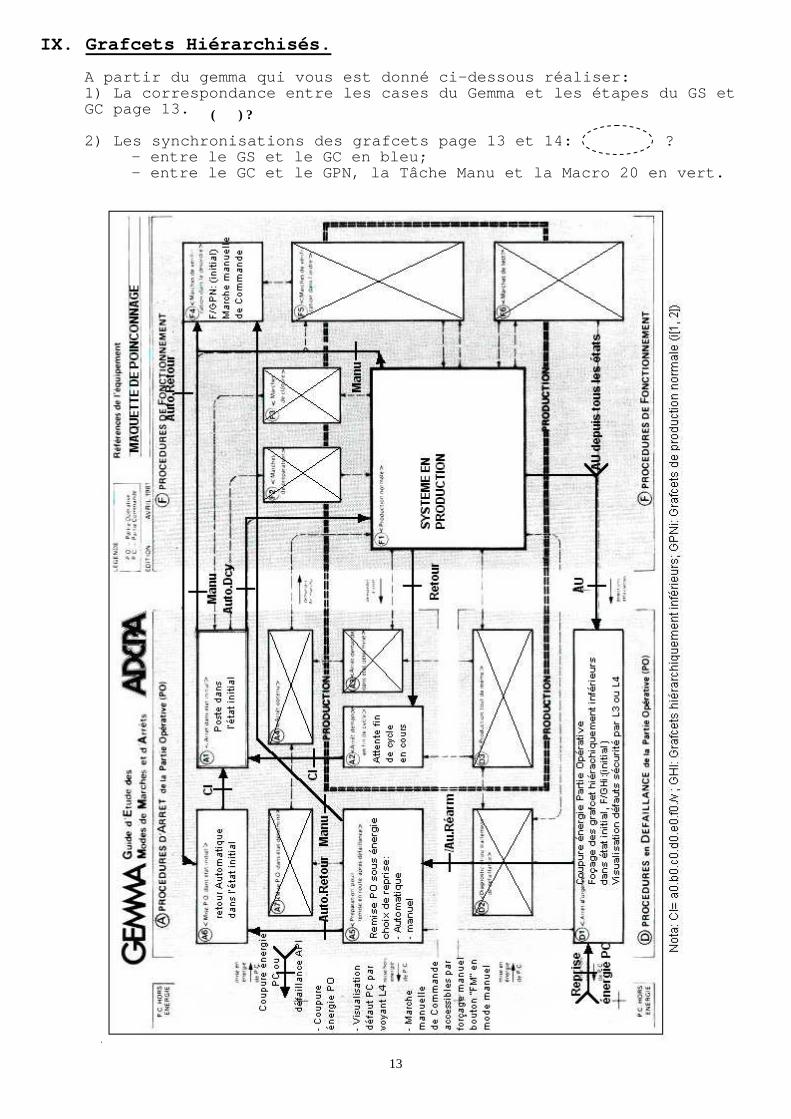
IX. Grafcets Hiérarchisés. A partir du gemma qui vous est donné ci-dessous réa liser: 1) La correspondance entre les cases du Gemma et le s étapes du GS et GC page 13.
2) Les synchronisations des grafcets page 13 et 14: ?
- entre le GS et le GC en bleu; - entre le GC et le GPN, la Tâche Manu et la Macr o 20 en vert.
( A2 ) ?
14
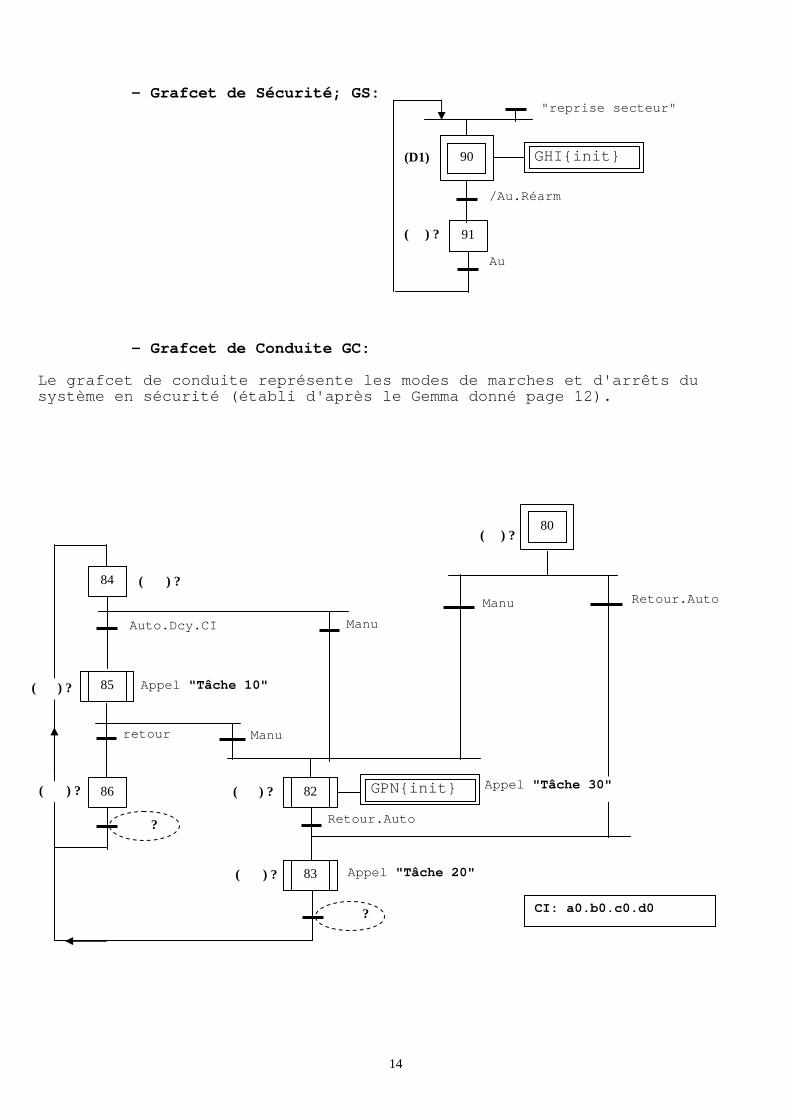
- Grafcet de Sécurité; GS:
- Grafcet de Conduite GC: Le grafcet de conduite représente les modes de marc hes et d'arrêts du système en sécurité (établi d'après le Gemma donné page 12).
91
90 GHI{init}
"reprise secteur"
/Au.Réarm
Au
(D1)
CI: a0.b0.c0.d0
80
Retour.Auto Manu
85
86 GPN{init} 82
83
?
?
Appel "Tâche 20"
Retour.Auto
Manu retour
Auto.Dcy.CI Manu
Appel "Tâche 30"
Appel "Tâche 10"
84
(A5) ?
( A1 ) ?
( F1 ) ?
( A2 ) ? ( F4 ) ?
( A6 ) ?
(A5) ?
15
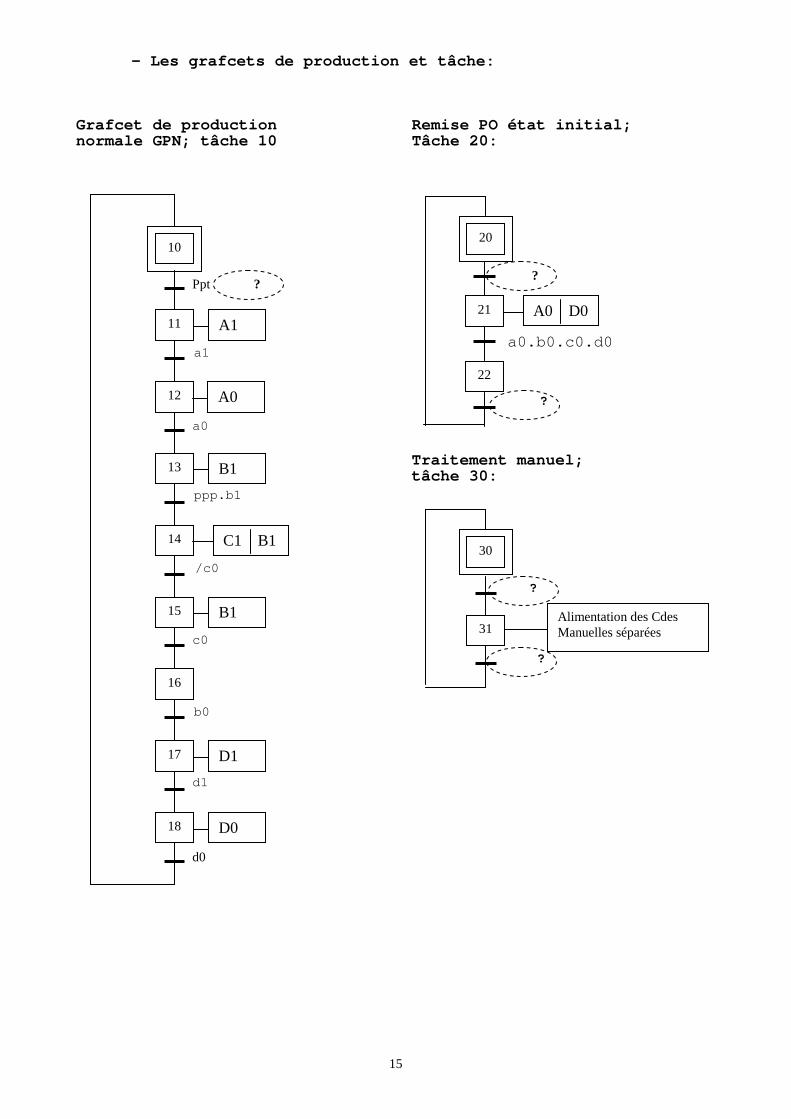
- Les grafcets de production et tâche: Grafcet de production Remise PO état initial; normale GPN; tâche 10 Tâche 20:
Traitement manuel; tâche 30:
10
11 A1
12 A0
13 B1
14 C1 B1
15 B1
16
17 D1
18 D0
Ppt ?
a1
a0
ppp.b1
/c0
c0
b0
d1
d0
31 Alimentation des Cdes Manuelles séparées
30
?
?
A0 D0
20
21
22
?
a0.b0.c0.d0
?
16
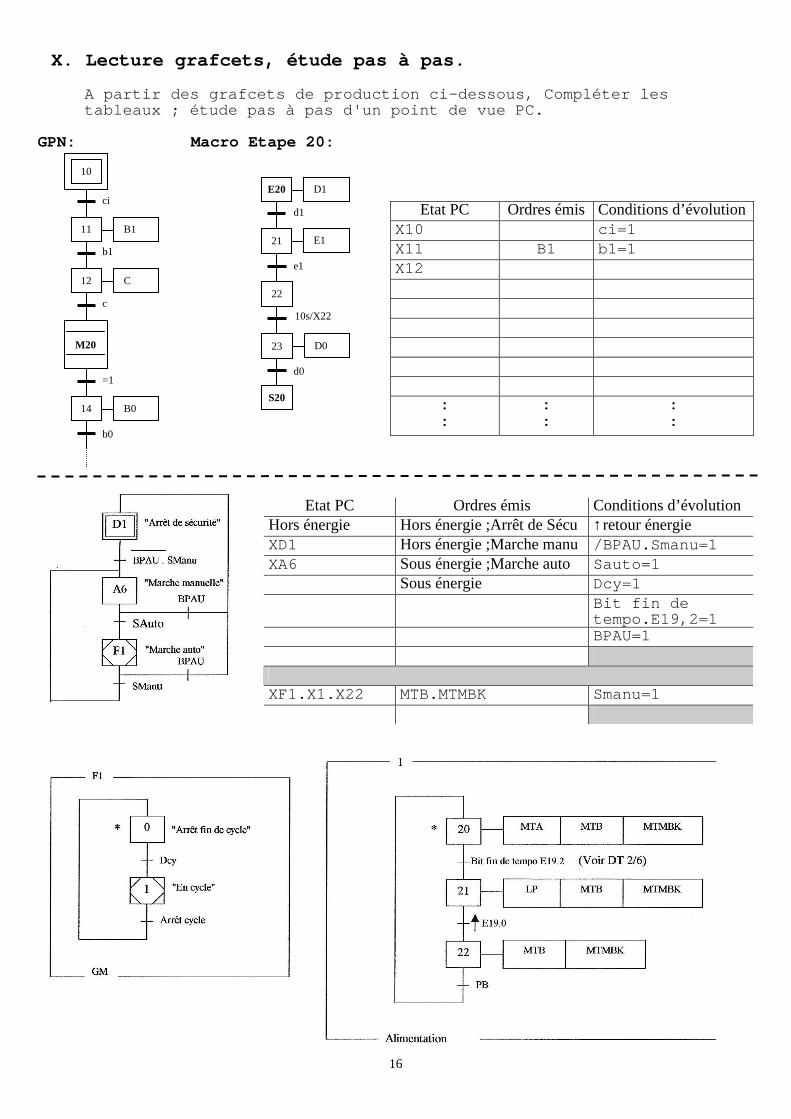
X. Lecture grafcets, étude pas à pas.
A partir des grafcets de production ci-dessous, Com pléter les tableaux ; étude pas à pas d'un point de vue PC.
GPN: Macro Etape 20:
Etat PC Ordres émis Conditions d’évolution X10 ci=1 X11 B1 b1=1 X12
: :
: :
: :
Etat PC Ordres émis Conditions d’évolution Hors énergie Hors énergie ;Arrêt de Sécu ↑retour énergie XD1 Hors énergie ;Marche manu /BPAU.Smanu=1 XA6 Sous énergie ;Marche auto Sauto=1 Sous énergie Dcy=1
Bit fin de tempo.E19,2=1
BPAU=1 XF1.X1.X22 MTB.MTMBK Smanu=1
E20
21
23
S20
D1
E1
22
D0
10s/X22
d1
e1
d0
10
11
12
M20
14
B1
C
B0
b0
c
=1
ci
b1
17
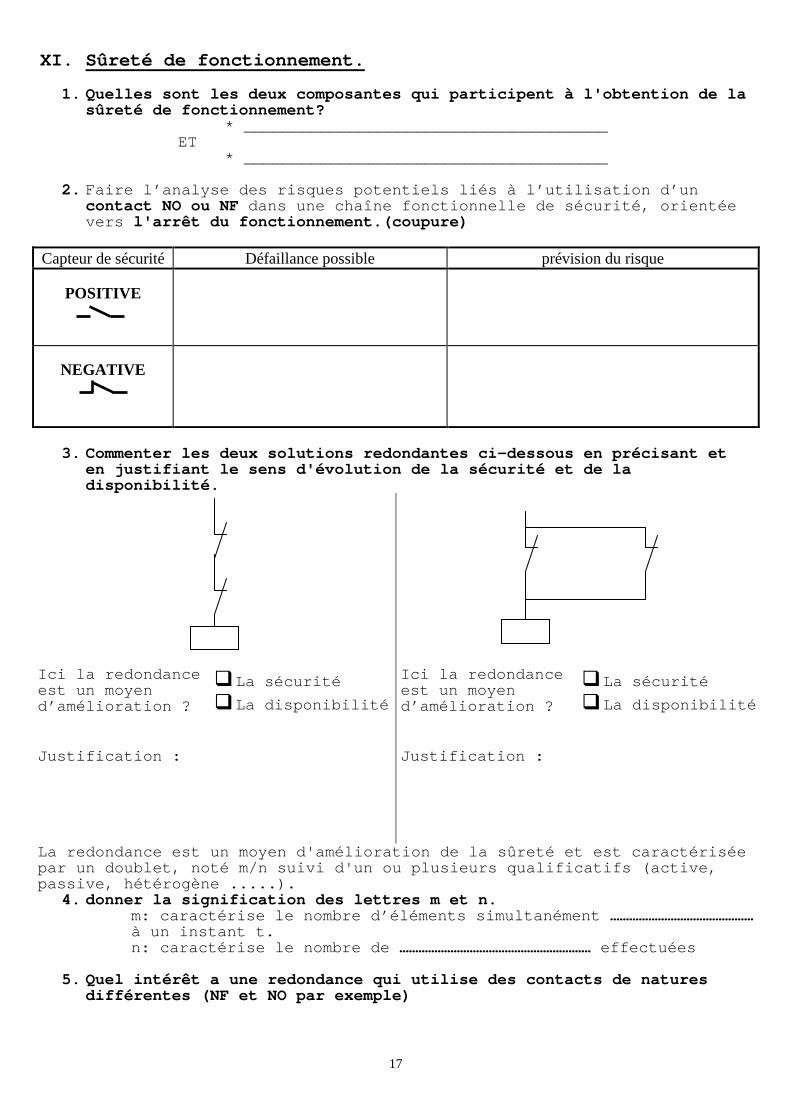
XI. Sûreté de fonctionnement.
1. Quelles sont les deux composantes qui participent à l'obtention de la sûreté de fonctionnement?
* ______________________________________ ET * ______________________________________
2. Faire l’analyse des risques potentiels liés à l’uti lisation d’un contact NO ou NF dans une chaîne fonctionnelle de sécurité, orientée vers l'arrêt du fonctionnement.(coupure)
Capteur de sécurité Défaillance possible prévision du risque
POSITIVE
NEGATIVE
3. Commenter les deux solutions redondantes ci-dessous en précisant et
en justifiant le sens d'évolution de la sécurité et de la disponibilité.
Ici la redondance est un moyen d’amélioration ?
� La sécurité
� La disponibilité
Ici la redondance est un moyen d’amélioration ?
� La sécurité
� La disponibilité
Justification :
Justification :
La redondance est un moyen d'amélioration de la sûr eté et est caractérisée par un doublet, noté m/n suivi d'un ou plusieurs qu alificatifs (active, passive, hétérogène .....).
4. donner la signification des lettres m et n. m: caractérise le nombre d’éléments simultanément ……………………………………… à un instant t. n: caractérise le nombre de …………………………………………………… effectuées
5. Quel intérêt a une redondance qui utilise des conta cts de natures
différentes (NF et NO par exemple)
18
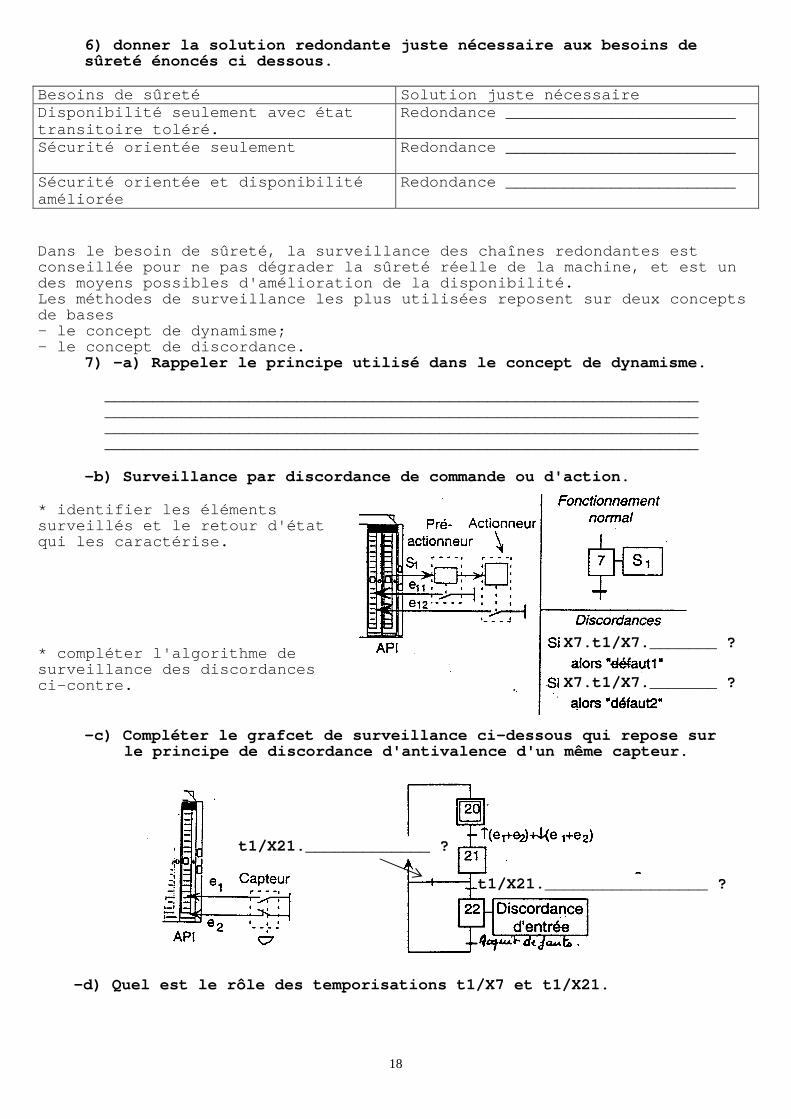
6) donner la solution redondante juste nécessaire a ux besoins de sûreté énoncés ci dessous.
Besoins de sûreté Solution juste nécessaire Disponibilité seulement avec état transitoire toléré.
Redondance ________________________
Sécurité orientée seulement Redondance ____________ ____________
Sécurité orientée et disponibilité améliorée
Redondance ________________________
Dans le besoin de sûreté, la surveillance des chaîn es redondantes est conseillée pour ne pas dégrader la sûreté réelle de la machine, et est un des moyens possibles d'amélioration de la disponibi lité. Les méthodes de surveillance les plus utilisées rep osent sur deux concepts de bases - le concept de dynamisme; - le concept de discordance.
7) -a) Rappeler le principe utilisé dans le concept de dynamisme. ____________________________________________ __________________ ____________________________________________ __________________ ____________________________________________ __________________ ____________________________________________ __________________
-b) Surveillance par discordance de commande ou d'a ction. * identifier les éléments surveillés et le retour d'état qui les caractérise. * compléter l'algorithme de surveillance des discordances ci-contre.
-c) Compléter le grafcet de surveillance ci-dessous qui repose sur le principe de discordance d'antivalence d 'un même capteur.
-d) Quel est le rôle des temporisations t1/X7 et t1 /X21.
X7.t1/X7._______ ?
X7.t1/X7._______ ?
t1/X21._________________ ?
t1/X21._____________ ?
19
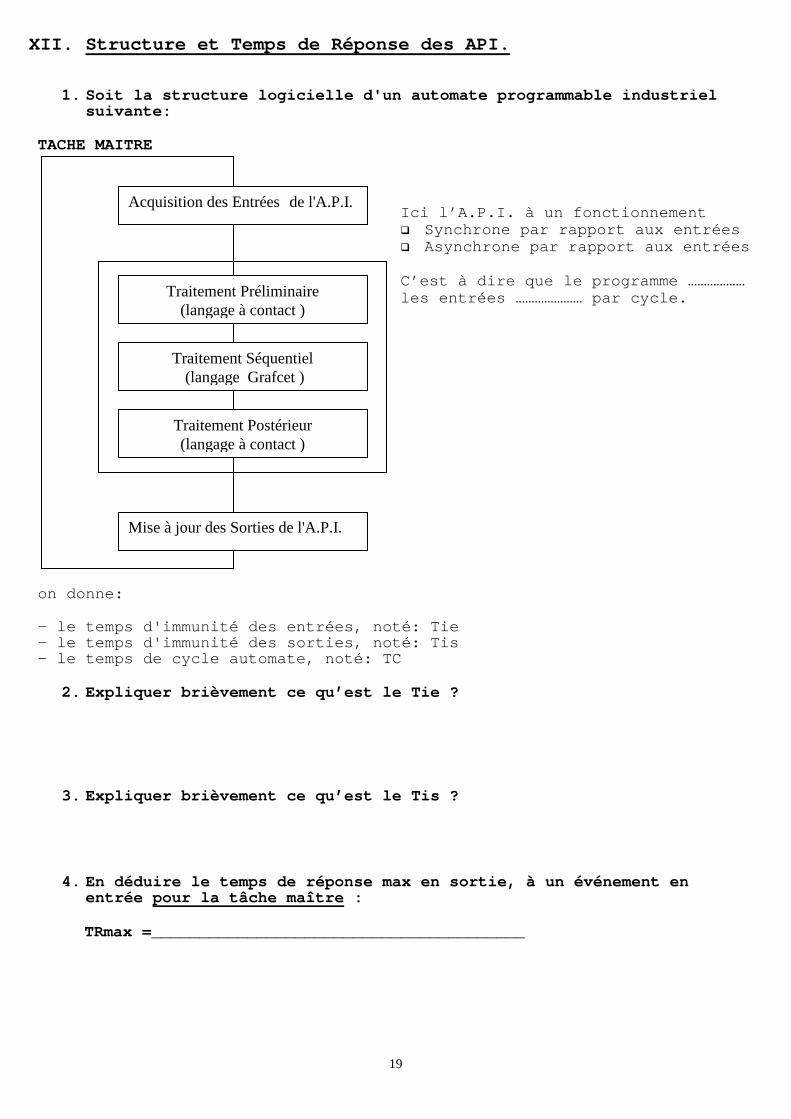
XII. Structure et Temps de Réponse des API.
1. Soit la structure logicielle d'un automate programm able industriel suivante:
TACHE MAITRE
Ici l’A.P.I. à un fonctionnement � Synchrone par rapport aux entrées � Asynchrone par rapport aux entrées C’est à dire que le programme ……………… les entrées ………………… par cycle.
on donne: - le temps d'immunité des entrées, noté: Tie - le temps d'immunité des sorties, noté: Tis - le temps de cycle automate, noté: TC
2. Expliquer brièvement ce qu’est le Tie ?
3. Expliquer brièvement ce qu’est le Tis ?
4. En déduire le temps de réponse max en sortie, à un événement en entrée pour la tâche maître :
TRmax = _______________________________________
Traitement Préliminaire (langage à contact )
Traitement Séquentiel (langage Grafcet )
Traitement Postérieur (langage à contact )
Mise à jour des Sorties de l'A.P.I.
Acquisition des Entrées de l'A.P.I.
20
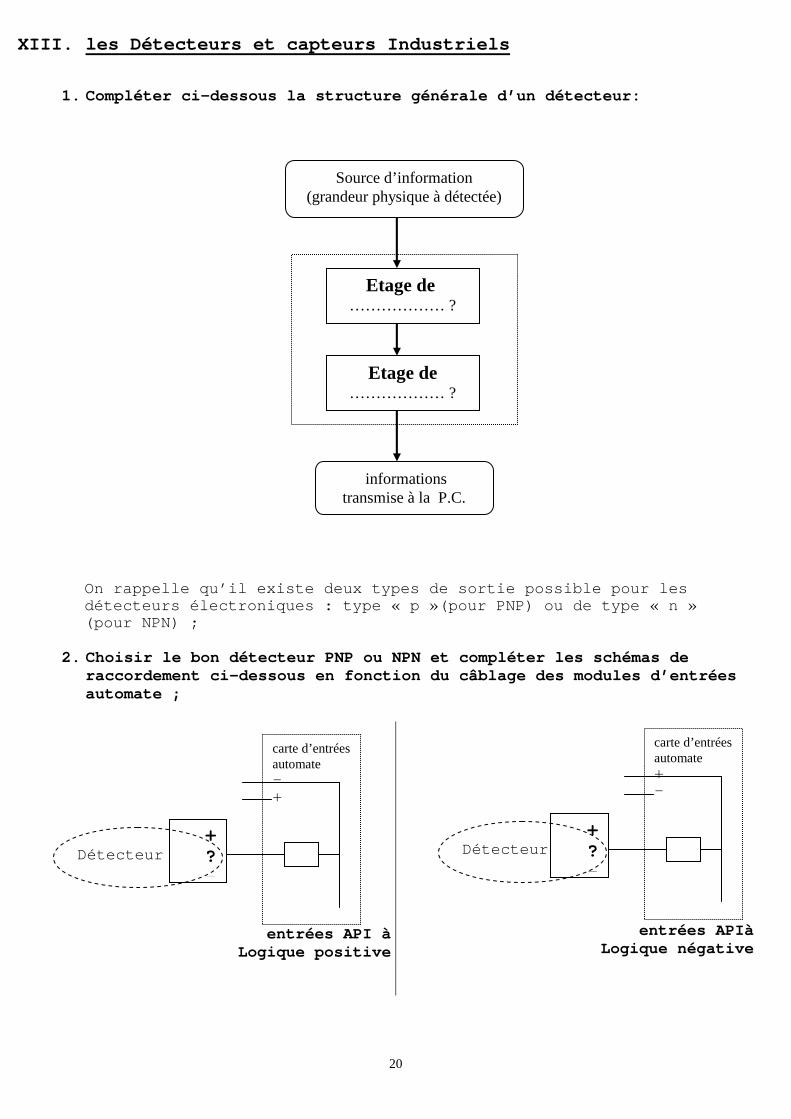
XIII. les Détecteurs et capteurs Industriels
1. Compléter ci-dessous la structure générale d’un dét ecteur:
On rappelle qu’il existe deux types de sortie possi ble pour les détecteurs électroniques : type « p »(pour PNP) ou de type « n » (pour NPN) ;
2. Choisir le bon détecteur PNP ou NPN et compléter le s schémas de
raccordement ci-dessous en fonction du câblage des modules d’entrées automate ;
entrées API à Logique positive
entrées APIà Logique négative
Source d’information (grandeur physique à détectée)
informations transmise à la P.C.
Etage de ……………… ?
Etage de ……………… ?
carte d’entrées automate - +
+ ? -
Détecteur
carte d’entrées automate + -
+ ? -
Détecteur
21
Entrée automate
Entrée automate
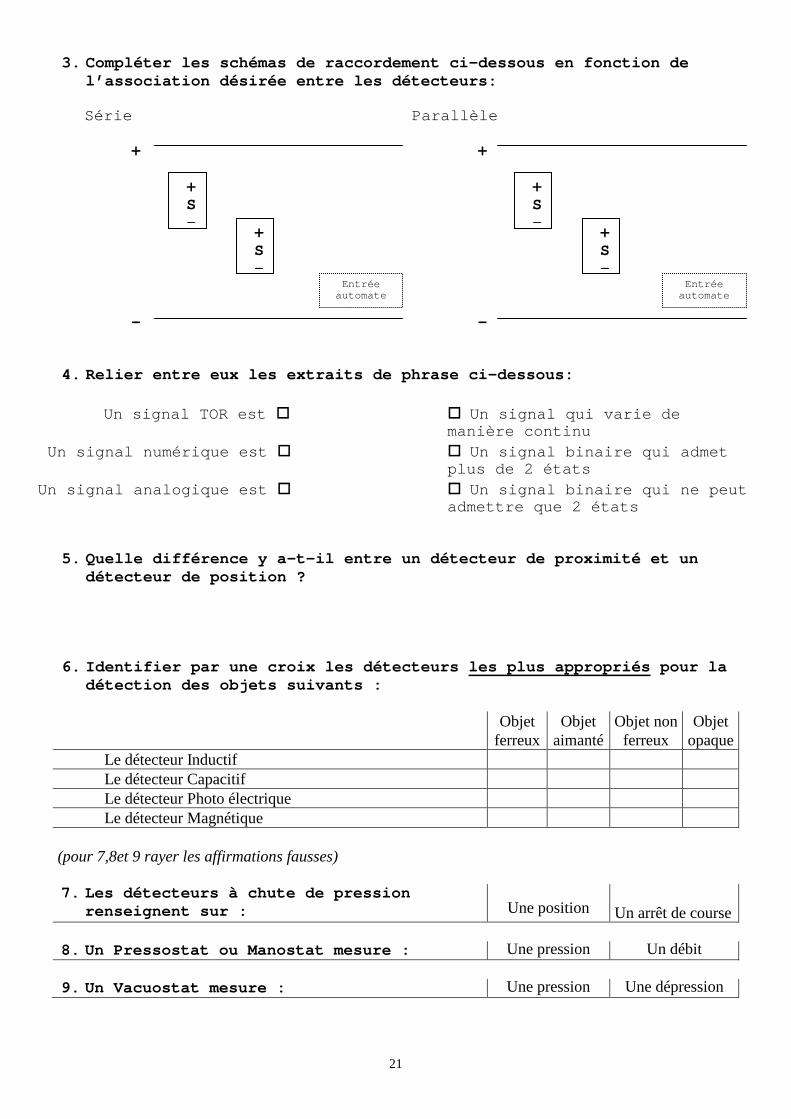
3. Compléter les schémas de raccordement ci-dessous en fonction de
l’association désirée entre les détecteurs: Série Parallèle
+ +
- -
4. Relier entre eux les extraits de phrase ci-dessous:
Un signal TOR est Un signal qui varie de manière continu
Un signal numérique est Un signal binaire qui admet plus de 2 états
Un signal analogique est Un signal binaire qui ne peut admettre que 2 états
5. Quelle différence y a-t-il entre un détecteur de pr oximité et un détecteur de position ?
6. Identifier par une croix les détecteurs les plus appropriés pour la détection des objets suivants :
Objet ferreux
Objet aimanté
Objet non ferreux
Objet opaque
Le détecteur Inductif Le détecteur Capacitif Le détecteur Photo électrique Le détecteur Magnétique
(pour 7,8et 9 rayer les affirmations fausses) 7. Les détecteurs à chute de pression
renseignent sur :
Une position Un arrêt de course
8. Un Pressostat ou Manostat mesure : Une pression Un débit 9. Un Vacuostat mesure : Une pression Une dépression
+ S -
+ S -
+ S -
+ S -
22
Les détecteurs de proximité Optique se composent es sentiellement d’un émetteur de lumière visible ou infrarouge associé à un récepteur photo sensible. La détection de l’indicateur est effective lorsque ce dernier coupe le faisceau lumineux.
10. Quels sont les trois principaux montages possibles ?
�
�
�
11. Quelles sont les particularités à respecter lors de la mise en œuvre de détecteurs de sécurité de types tapis sensibles ou barrières immatérielles ?
�
�
12. Qu’est-ce qu’un codeur incrémental ? Comment différentie-t-on le sens de rotation ?
Peut-on jouer sur la précision ? Si oui comment ?
13. Qu’est-ce qu’un codeur absolu ?
Quel est la principale caractéristique des codes utilisés ?
14. Quelles significations ont les abréviations CTP ou CTN pour un capteur de température et rappeler la relation phys ique liant R à T ?
� CTP : � CTN :
� R =
23
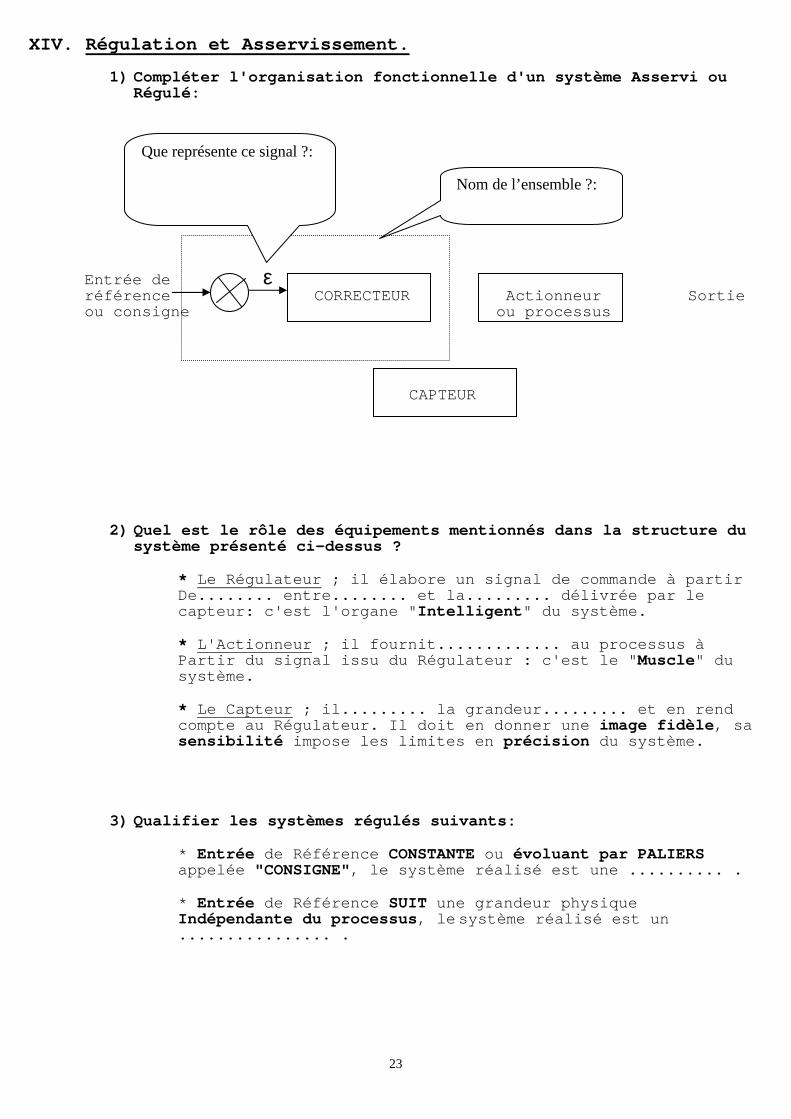
XIV. Régulation et Asservissement.
1) Compléter l'organisation fonctionnelle d'un système Asservi ou Régulé:
Entrée de ε référence CORRECTEUR Action neur Sortie ou consigne ou proc essus CAPTEUR
2) Quel est le rôle des équipements mentionnés dans la structure du système présenté ci-dessus ?
* Le Régulateur ; il élabore un signal de commande à partir De........ entre........ et la......... délivrée par le capteur: c'est l'organe " Intelligent " du système. * L'Actionneur ; il fournit............. au processus à Partir du signal issu du Régulateur : c'est le " Muscle " du système. * Le Capteur ; il......... la grandeur......... et en rend compte au Régulateur. Il doit en donner une image fidèle , sa sensibilité impose les limites en précision du système.
3) Qualifier les systèmes régulés suivants:
* Entrée de Référence CONSTANTE ou évoluant par PALIERS appelée "CONSIGNE", le système réalisé est une .......... . * Entrée de Référence SUIT une grandeur physique Indépendante du processus , le système réalisé est un ................ .
Nom de l’ensemble ?:
Que représente ce signal ?:
24
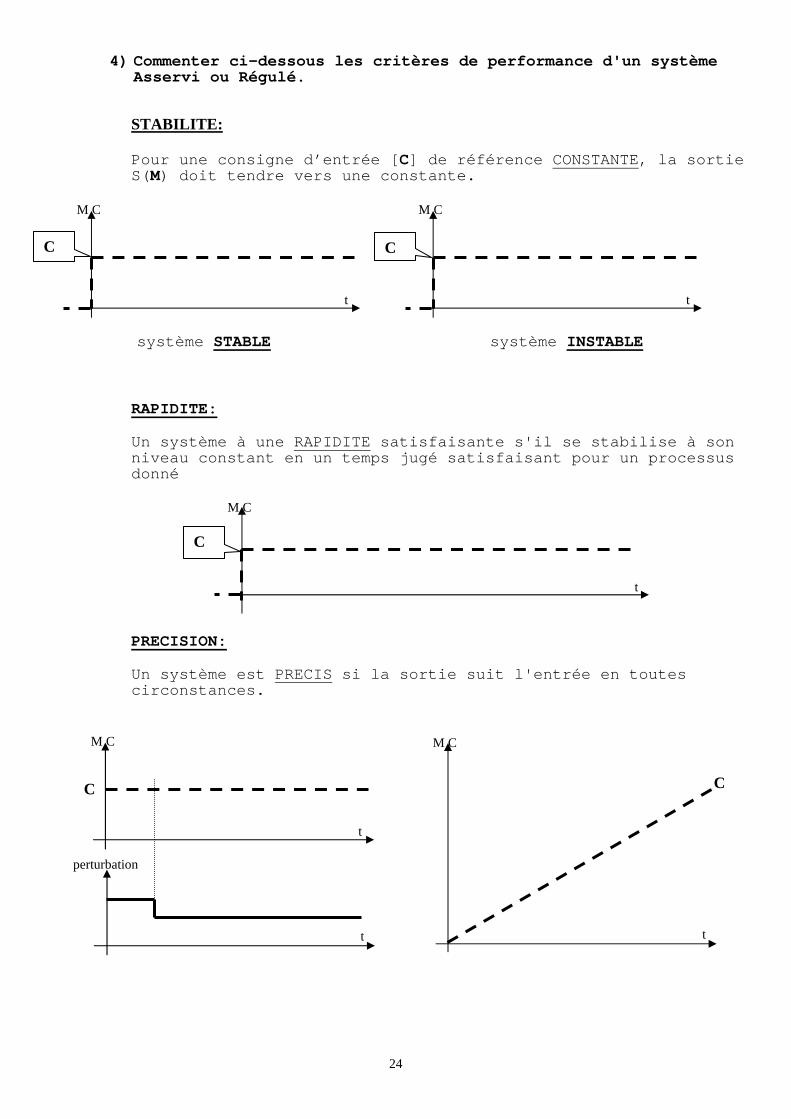
4) Commenter ci-dessous les critères de performance d' un système
Asservi ou Régulé. STABILITE:
Pour une consigne d’entrée [ C] de référence CONSTANTE , la sortie S( M) doit tendre vers une constante.
système STABLE système INSTABLE RAPIDITE:
Un système à une RAPIDITE satisfaisante s'il se stabilise à son niveau constant en un temps jugé satisfaisant pour un processus donné
PRECISION:
Un système est PRECIS si la sortie suit l'entrée en toutes circonstances.
C
t
M C
C
t
M C
C
t
M C
t
M C
C
t
perturbation
t
M C
C
25
C
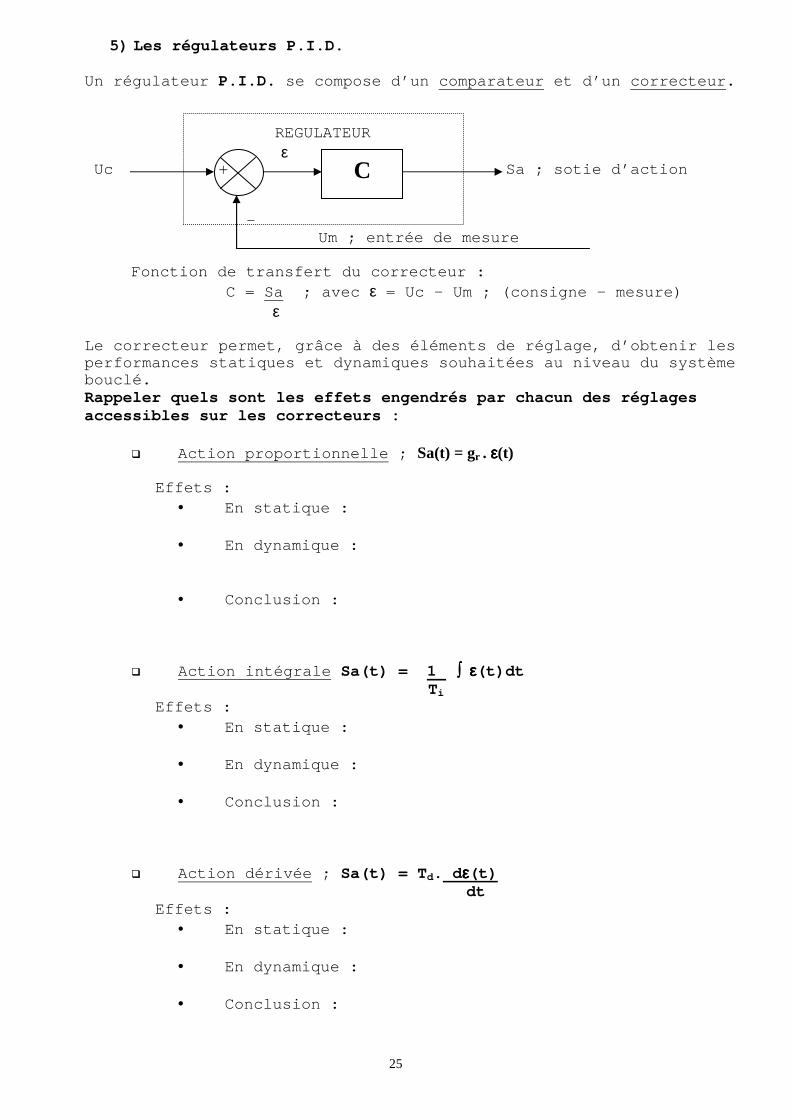
5) Les régulateurs P.I.D.
Un régulateur P.I.D. se compose d’un comparateur et d’un correcteur . REGULATEUR
ε Uc + Sa ; so tie d’action
-
Um ; entrée de mesure Fonction de transfert du correcteur :
C = Sa ; avec ε = Uc – Um ; (consigne – mesure) ε
Le correcteur permet, grâce à des éléments de régla ge, d’obtenir les performances statiques et dynamiques souhaitées au niveau du système bouclé. Rappeler quels sont les effets engendrés par chacun des réglages accessibles sur les correcteurs :
� Action proportionnelle ; Sa(t) = gr . εεεε(t)
Effets : • En statique : • En dynamique :
• Conclusion :
� Action intégrale Sa(t) = 1 ∫∫∫∫ εεεε(t)dt T i
Effets : • En statique : • En dynamique : • Conclusion :
� Action dérivée ; Sa(t) = T d. d εεεε(t) dt
Effets : • En statique : • En dynamique : • Conclusion :
26
PC ou API Programme d’asservissement de vitesse en fonction de la distance qu’il reste à parcourir
d P0 Pa
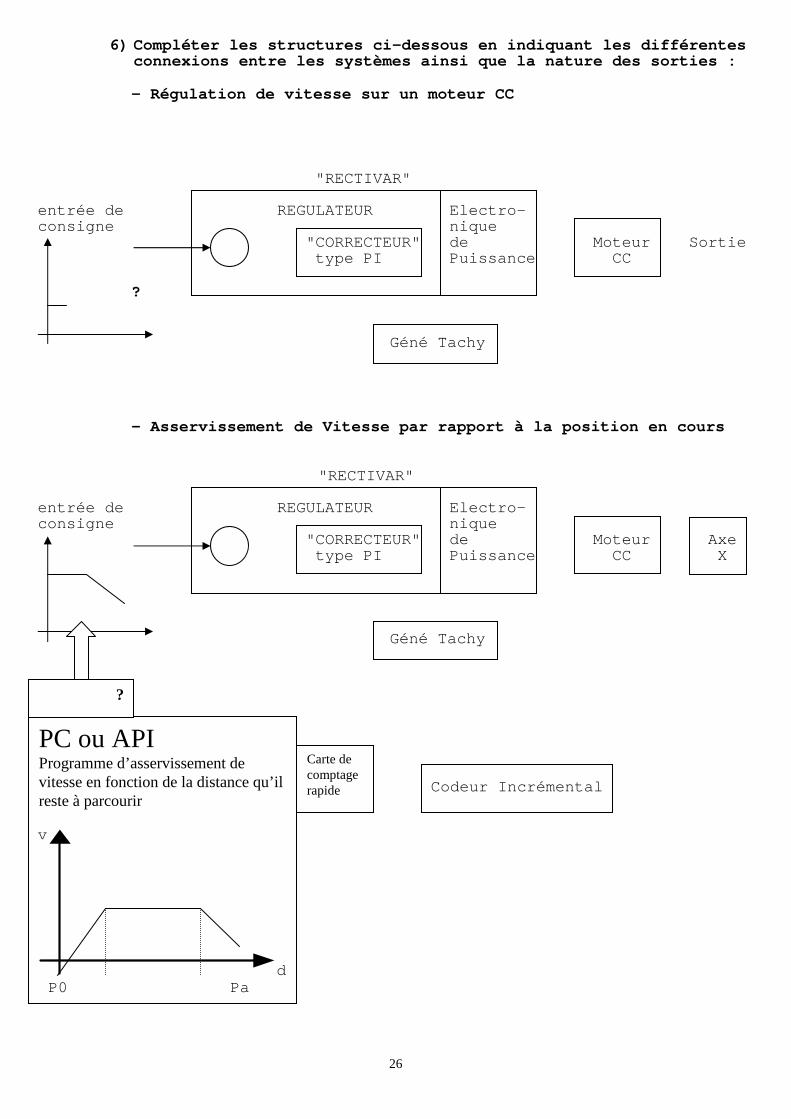
6) Compléter les structures ci-dessous en indiquant le s différentes connexions entre les systèmes ainsi que la nature d es sorties :
- Régulation de vitesse sur un moteur CC "RECTIVAR" entrée de REGULATEUR Electro- consigne nique "CORRECTEUR" de Moteur Sortie type PI Puissanc e CC
? Géné Tachy - Asservissement de Vitesse par rapport à la positi on en cours
"RECTIVAR" entrée de REGULATEUR Electro- consigne nique "CORRECTEUR" de Moteur Axe type PI Puissanc e CC X Géné Tachy
Codeur Incrémental v
?
Carte de comptage rapide