Thème : L’exploration spatiale - Accueil · Au bout de huit semaines minimum de réalisation,...
27
Projet Continuité CM2-6 e La robotique n’a pas d’âge ! Collège Fleming – Ecole le hameau du château 38360 Sassenage Thème : L’exploration spatiale Projet supporté par la DAN 2016 : Heure numérique Prezi à visualiser en ligne (cliquer sur l’image) Porteurs de projet : C. Minutolo V. Bonnet
Transcript of Thème : L’exploration spatiale - Accueil · Au bout de huit semaines minimum de réalisation,...
Projet Continuité CM2-6e
La robotique n’a pas d’âge !
Collège Fleming – Ecole le hameau du château 38360 Sassenage
Thème : L’exploration spatiale
Projet supporté par la DAN 2016 : Heure numérique
Prezi à visualiser en ligne (cliquer sur l’image)
Porteurs de projet :
C. Minutolo V. Bonnet
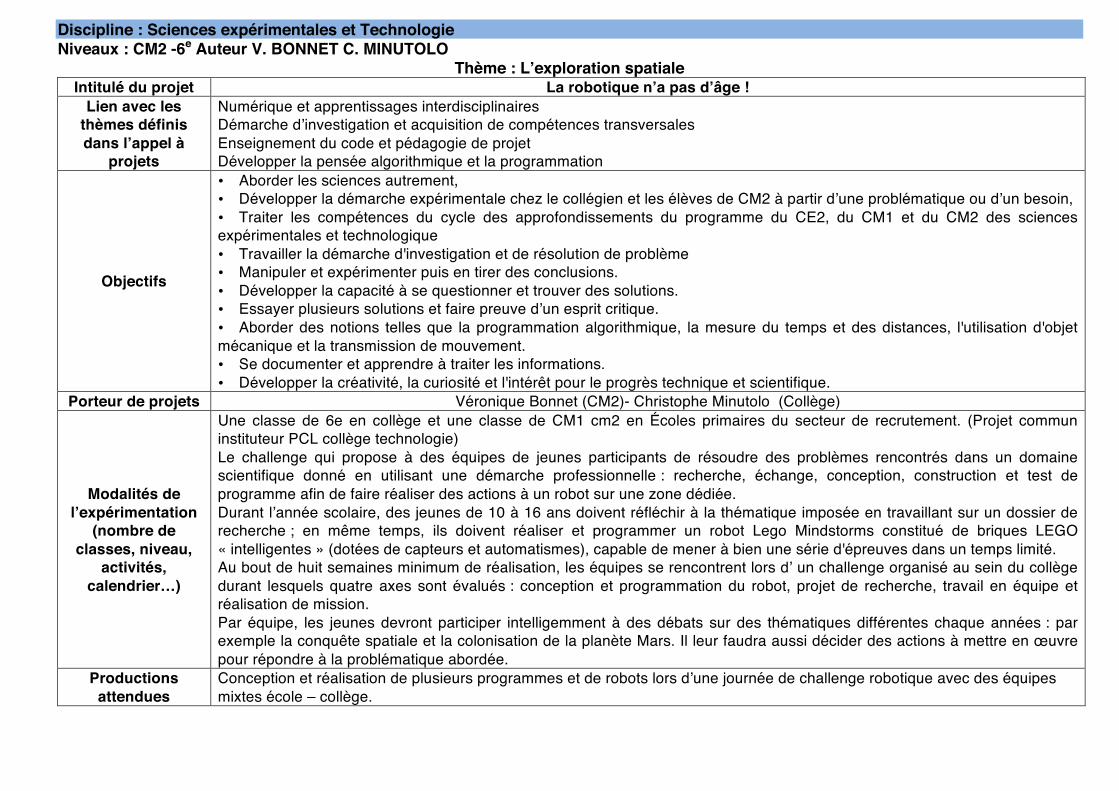
Discipline : Sciences expérimentales et Technologie Niveaux : CM2 -6e Auteur V. BONNET C. MINUTOLO
Thème : L’exploration spatiale Intitulé du projet La robotique n’a pas d’âge !
Lien avec les thèmes définis dans l’appel à
projets
Numérique et apprentissages interdisciplinaires Démarche d’investigation et acquisition de compétences transversales Enseignement du code et pédagogie de projet Développer la pensée algorithmique et la programmation
Objectifs
• Aborder les sciences autrement, • Développer la démarche expérimentale chez le collégien et les élèves de CM2 à partir d’une problématique ou d’un besoin, • Traiter les compétences du cycle des approfondissements du programme du CE2, du CM1 et du CM2 des sciences expérimentales et technologique • Travailler la démarche d'investigation et de résolution de problème • Manipuler et expérimenter puis en tirer des conclusions. • Développer la capacité à se questionner et trouver des solutions. • Essayer plusieurs solutions et faire preuve d’un esprit critique. • Aborder des notions telles que la programmation algorithmique, la mesure du temps et des distances, l'utilisation d'objet mécanique et la transmission de mouvement. • Se documenter et apprendre à traiter les informations. • Développer la créativité, la curiosité et l'intérêt pour le progrès technique et scientifique.
Porteur de projets Véronique Bonnet (CM2)- Christophe Minutolo (Collège)
Modalités de l’expérimentation
(nombre de classes, niveau,
activités, calendrier…)
Une classe de 6e en collège et une classe de CM1 cm2 en Écoles primaires du secteur de recrutement. (Projet commun instituteur PCL collège technologie) Le challenge qui propose à des équipes de jeunes participants de résoudre des problèmes rencontrés dans un domaine scientifique donné en utilisant une démarche professionnelle : recherche, échange, conception, construction et test de programme afin de faire réaliser des actions à un robot sur une zone dédiée. Durant l’année scolaire, des jeunes de 10 à 16 ans doivent réfléchir à la thématique imposée en travaillant sur un dossier de recherche ; en même temps, ils doivent réaliser et programmer un robot Lego Mindstorms constitué de briques LEGO « intelligentes » (dotées de capteurs et automatismes), capable de mener à bien une série d'épreuves dans un temps limité. Au bout de huit semaines minimum de réalisation, les équipes se rencontrent lors d’ un challenge organisé au sein du collège durant lesquels quatre axes sont évalués : conception et programmation du robot, projet de recherche, travail en équipe et réalisation de mission. Par équipe, les jeunes devront participer intelligemment à des débats sur des thématiques différentes chaque années : par exemple la conquête spatiale et la colonisation de la planète Mars. Il leur faudra aussi décider des actions à mettre en œuvre pour répondre à la problématique abordée.
Productions attendues
Conception et réalisation de plusieurs programmes et de robots lors d’une journée de challenge robotique avec des équipes mixtes école – collège.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 3
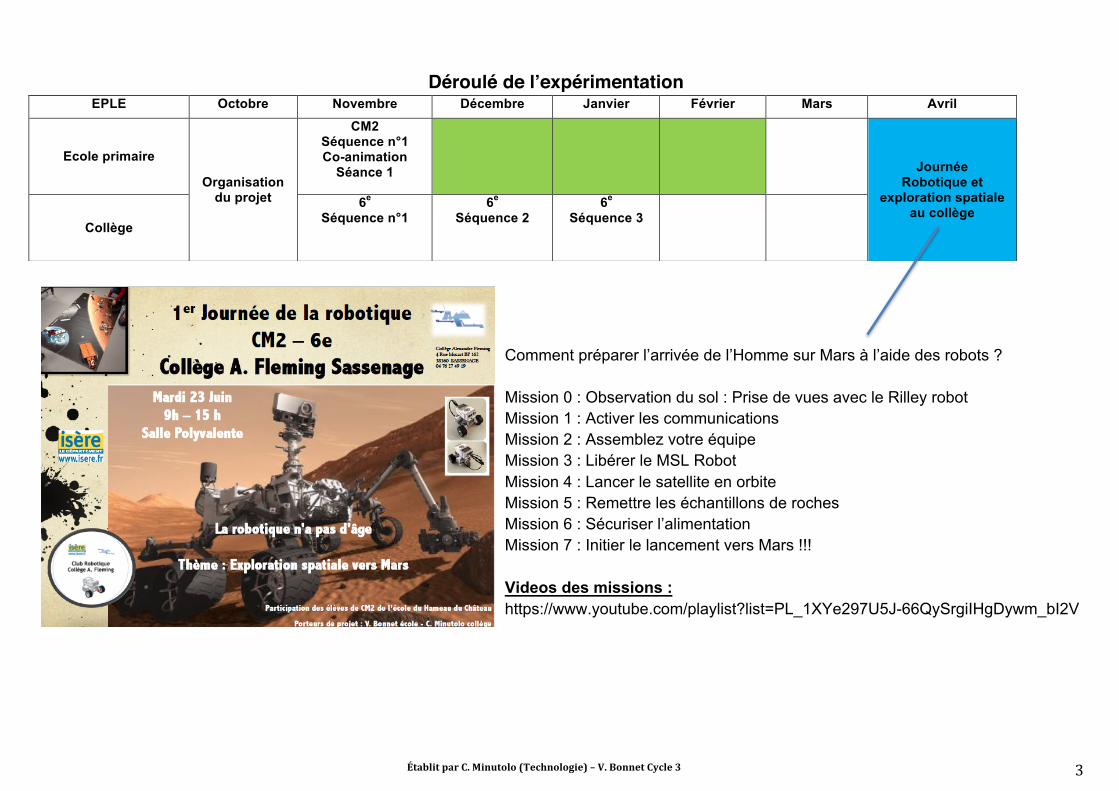
Déroulé de l’expérimentation
Comment préparer l’arrivée de l’Homme sur Mars à l’aide des robots ? Mission 0 : Observation du sol : Prise de vues avec le Rilley robot Mission 1 : Activer les communications Mission 2 : Assemblez votre équipe Mission 3 : Libérer le MSL Robot Mission 4 : Lancer le satellite en orbite Mission 5 : Remettre les échantillons de roches Mission 6 : Sécuriser l’alimentation Mission 7 : Initier le lancement vers Mars !!!Videos des missions : https://www.youtube.com/playlist?list=PL_1XYe297U5J-66QySrgiIHgDywm_bI2V
EPLE Octobre Novembre Décembre Janvier Février Mars Avril
Ecole primaire
Organisation du projet
CM2 Séquence n°1 Co-animation
Séance 1
Journée Robotique et
exploration spatiale au collège
Collège
6e Séquence n°1
6e Séquence 2
6e Séquence 3
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 4
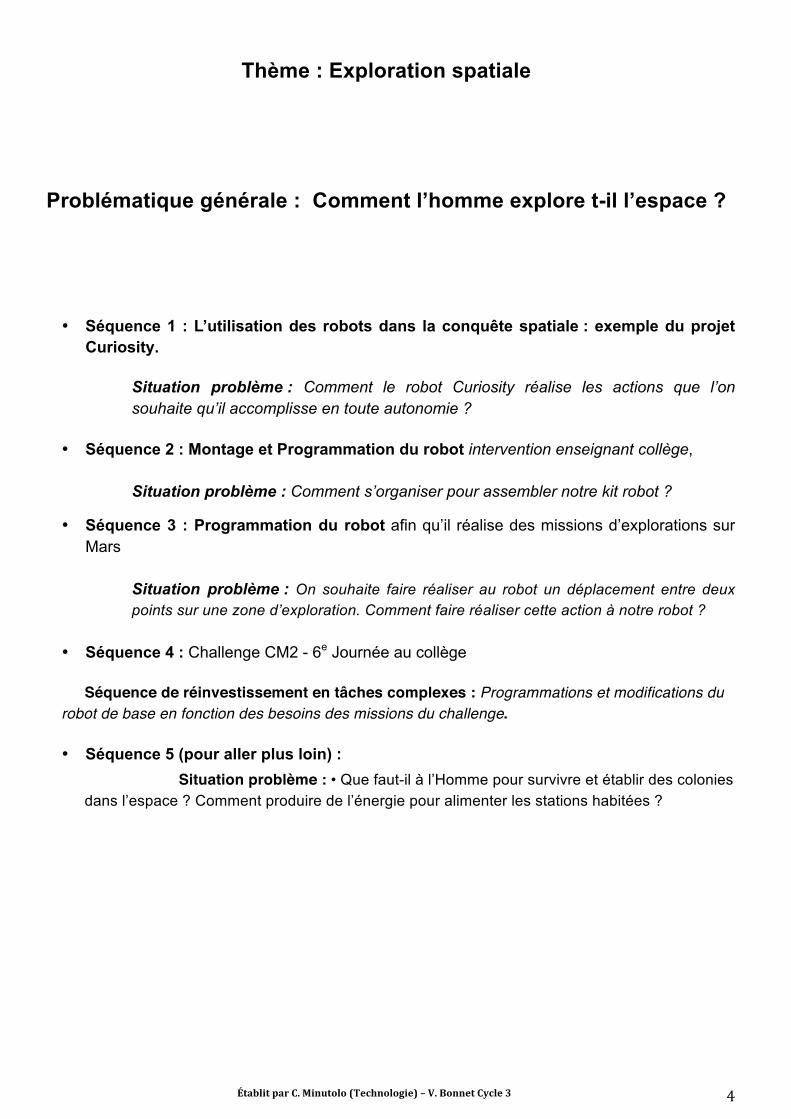
Thème : Exploration spatiale
Problématique générale : Comment l’homme explore t-il l’espace ?
• Séquence 1 : L’utilisation des robots dans la conquête spatiale : exemple du projet
Curiosity.
Situation problème : Comment le robot Curiosity réalise les actions que l’on souhaite qu’il accomplisse en toute autonomie ?
• Séquence 2 : Montage et Programmation du robot intervention enseignant collège,
Situation problème : Comment s’organiser pour assembler notre kit robot ?
• Séquence 3 : Programmation du robot afin qu’il réalise des missions d’explorations sur Mars
Situation problème : On souhaite faire réaliser au robot un déplacement entre deux points sur une zone d’exploration. Comment faire réaliser cette action à notre robot ?
• Séquence 4 : Challenge CM2 - 6e Journée au collège
Séquence de réinvestissement en tâches complexes : Programmations et modifications du robot de base en fonction des besoins des missions du challenge.
• Séquence 5 (pour aller plus loin) : Situation problème : • Que faut-il à l’Homme pour survivre et établir des colonies dans l’espace ? Comment produire de l’énergie pour alimenter les stations habitées ?
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 5
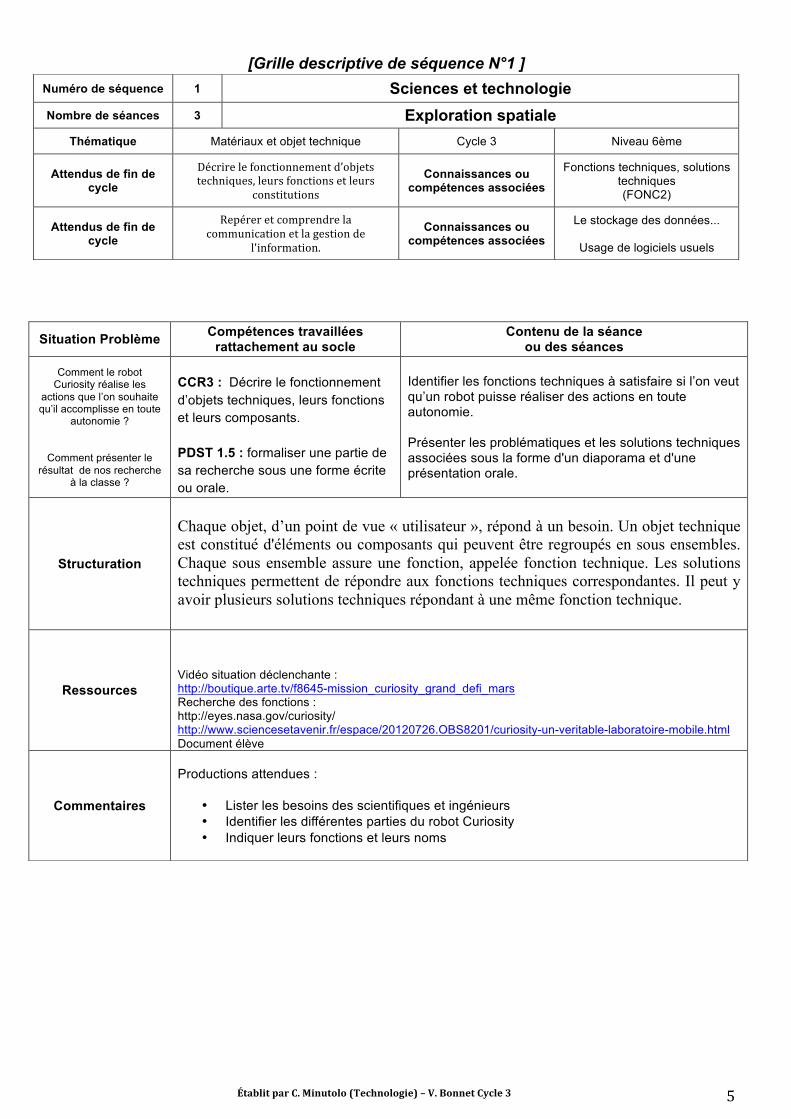
[Grille descriptive de séquence N°1 ]
Numéro de séquence 1 Sciences et technologie Nombre de séances 3 Exploration spatiale
Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Décrirelefonctionnementd’objetstechniques,leursfonctionsetleurs
constitutions
Connaissances ou compétences associées
Fonctions techniques, solutions techniques (FONC2)
Attendus de fin de cycle
Repéreretcomprendrelacommunicationetlagestionde
l'information.
Connaissances ou compétences associées
Le stockage des données...
Usage de logiciels usuels
Situation Problème Compétences travaillées rattachement au socle
Contenu de la séance ou des séances
Comment le robot Curiosity réalise les
actions que l’on souhaite qu’il accomplisse en toute
autonomie ?
Comment présenter le
résultat de nos recherche à la classe ?
CCR3 : Décrire le fonctionnement d’objets techniques, leurs fonctions et leurs composants. PDST 1.5 : formaliser une partie de sa recherche sous une forme écrite ou orale.
Identifier les fonctions techniques à satisfaire si l’on veut qu’un robot puisse réaliser des actions en toute autonomie. Présenter les problématiques et les solutions techniques associées sous la forme d'un diaporama et d'une présentation orale.
Structuration
Chaque objet, d’un point de vue « utilisateur », répond à un besoin. Un objet technique est constitué d'éléments ou composants qui peuvent être regroupés en sous ensembles. Chaque sous ensemble assure une fonction, appelée fonction technique. Les solutions techniques permettent de répondre aux fonctions techniques correspondantes. Il peut y avoir plusieurs solutions techniques répondant à une même fonction technique.
Ressources
Vidéo situation déclenchante : http://boutique.arte.tv/f8645-mission_curiosity_grand_defi_mars Recherche des fonctions : http://eyes.nasa.gov/curiosity/ http://www.sciencesetavenir.fr/espace/20120726.OBS8201/curiosity-un-veritable-laboratoire-mobile.html Document élève
Commentaires
Productions attendues :
• Lister les besoins des scientifiques et ingénieurs • Identifier les différentes parties du robot Curiosity • Indiquer leurs fonctions et leurs noms
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 6
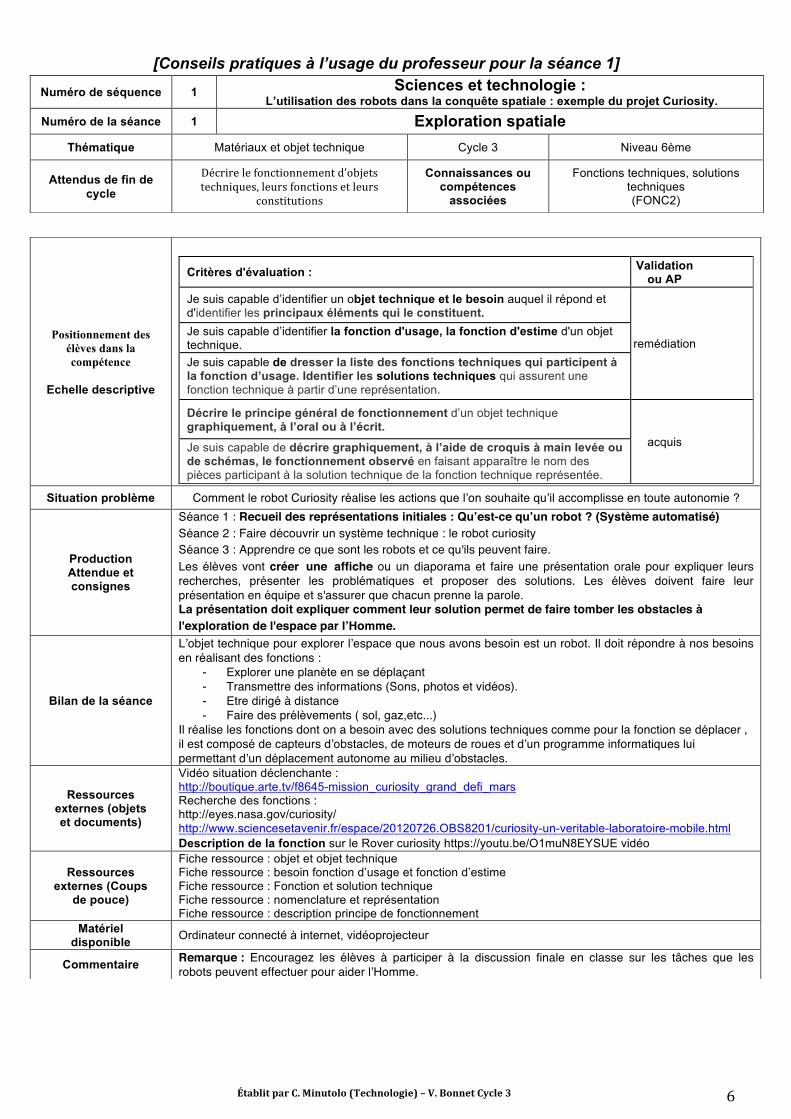
[Conseils pratiques à l’usage du professeur pour la séance 1]
Numéro de séquence 1 Sciences et technologie : L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity.
Numéro de la séance 1 Exploration spatiale
Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Décrirelefonctionnementd’objetstechniques,leursfonctionsetleurs
constitutions
Connaissances ou compétences
associées
Fonctions techniques, solutions techniques (FONC2)
Positionnement des élèves dans la compétence
Echelle descriptive
Critères d'évaluation : Validation ou AP
Je suis capable d’identifier un objet technique et le besoin auquel il répond et d'identifier les principaux éléments qui le constituent.
remédiation Je suis capable d’identifier la fonction d'usage, la fonction d'estime d'un objet technique. Je suis capable de dresser la liste des fonctions techniques qui participent à la fonction d’usage. Identifier les solutions techniques qui assurent une fonction technique à partir d’une représentation.
Décrire le principe général de fonctionnement d’un objet technique graphiquement, à l’oral ou à l’écrit.
acquis Je suis capable de décrire graphiquement, à l’aide de croquis à main levée ou de schémas, le fonctionnement observé en faisant apparaître le nom des pièces participant à la solution technique de la fonction technique représentée.
Situation problème Comment le robot Curiosity réalise les actions que l’on souhaite qu’il accomplisse en toute autonomie ?
Production Attendue et consignes
Séance 1 : Recueil des représentations initiales : Qu’est-ce qu’un robot ? (Système automatisé) Séance 2 : Faire découvrir un système technique : le robot curiosity Séance 3 : Apprendre ce que sont les robots et ce qu'ils peuvent faire. Les élèves vont créer une affiche ou un diaporama et faire une présentation orale pour expliquer leurs recherches, présenter les problématiques et proposer des solutions. Les élèves doivent faire leur présentation en équipe et s'assurer que chacun prenne la parole. La présentation doit expliquer comment leur solution permet de faire tomber les obstacles à l'exploration de l'espace par l’Homme.
Bilan de la séance
L’objet technique pour explorer l’espace que nous avons besoin est un robot. Il doit répondre à nos besoins en réalisant des fonctions :
- Explorer une planète en se déplaçant - Transmettre des informations (Sons, photos et vidéos). - Etre dirigé à distance - Faire des prélèvements ( sol, gaz,etc...)
Il réalise les fonctions dont on a besoin avec des solutions techniques comme pour la fonction se déplacer , il est composé de capteurs d’obstacles, de moteurs de roues et d’un programme informatiques lui permettant d’un déplacement autonome au milieu d’obstacles.
Ressources externes (objets et documents)
Vidéo situation déclenchante : http://boutique.arte.tv/f8645-mission_curiosity_grand_defi_mars Recherche des fonctions : http://eyes.nasa.gov/curiosity/ http://www.sciencesetavenir.fr/espace/20120726.OBS8201/curiosity-un-veritable-laboratoire-mobile.html
• Description de la fonction sur le Rover curiosity https://youtu.be/O1muN8EYSUE vidéo
Ressources externes (Coups
de pouce)
Fiche ressource : objet et objet technique Fiche ressource : besoin fonction d’usage et fonction d’estime Fiche ressource : Fonction et solution technique Fiche ressource : nomenclature et représentation Fiche ressource : description principe de fonctionnement
Matériel disponible Ordinateur connecté à internet, vidéoprojecteur
Commentaire Remarque : Encouragez les élèves à participer à la discussion finale en classe sur les tâches que les robots peuvent effectuer pour aider l’Homme.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 7
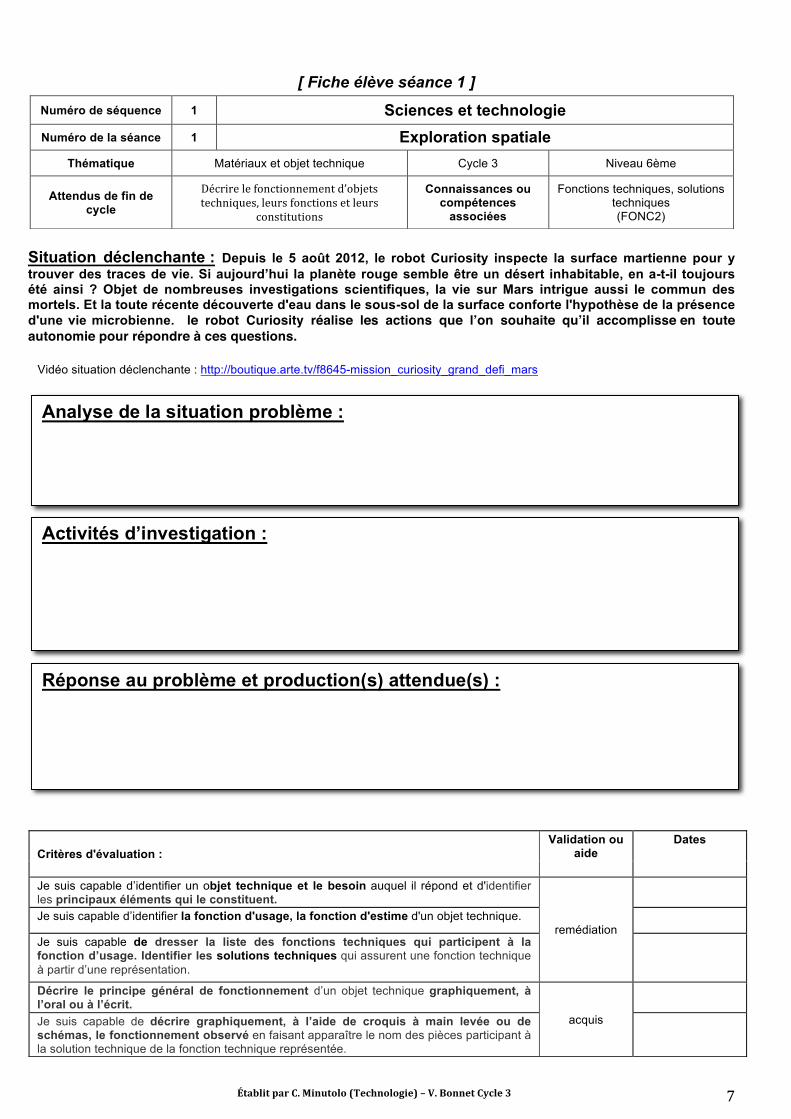
[ Fiche élève séance 1 ]
Situation déclenchante : Depuis le 5 août 2012, le robot Curiosity inspecte la surface martienne pour y trouver des traces de vie. Si aujourd’hui la planète rouge semble être un désert inhabitable, en a-t-il toujours été ainsi ? Objet de nombreuses investigations scientifiques, la vie sur Mars intrigue aussi le commun des mortels. Et la toute récente découverte d'eau dans le sous-sol de la surface conforte l'hypothèse de la présence d'une vie microbienne. le robot Curiosity réalise les actions que l’on souhaite qu’il accomplisse en toute autonomie pour répondre à ces questions.
Vidéo situation déclenchante : http://boutique.arte.tv/f8645-mission_curiosity_grand_defi_mars
Numéro de séquence 1 Sciences et technologie Numéro de la séance 1 Exploration spatiale
Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Décrirelefonctionnementd’objetstechniques,leursfonctionsetleurs
constitutions
Connaissances ou compétences
associées
Fonctions techniques, solutions techniques (FONC2)
Critères d'évaluation : Validation ou
aide Dates
Je suis capable d’identifier un objet technique et le besoin auquel il répond et d'identifier les principaux éléments qui le constituent.
remédiation
Je suis capable d’identifier la fonction d'usage, la fonction d'estime d'un objet technique.
Je suis capable de dresser la liste des fonctions techniques qui participent à la fonction d’usage. Identifier les solutions techniques qui assurent une fonction technique à partir d’une représentation.
Décrire le principe général de fonctionnement d’un objet technique graphiquement, à l’oral ou à l’écrit.
acquis
Je suis capable de décrire graphiquement, à l’aide de croquis à main levée ou de schémas, le fonctionnement observé en faisant apparaître le nom des pièces participant à la solution technique de la fonction technique représentée.
Analyse de la situation problème :
Activités d’investigation :
Réponse au problème et production(s) attendue(s) :
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 8
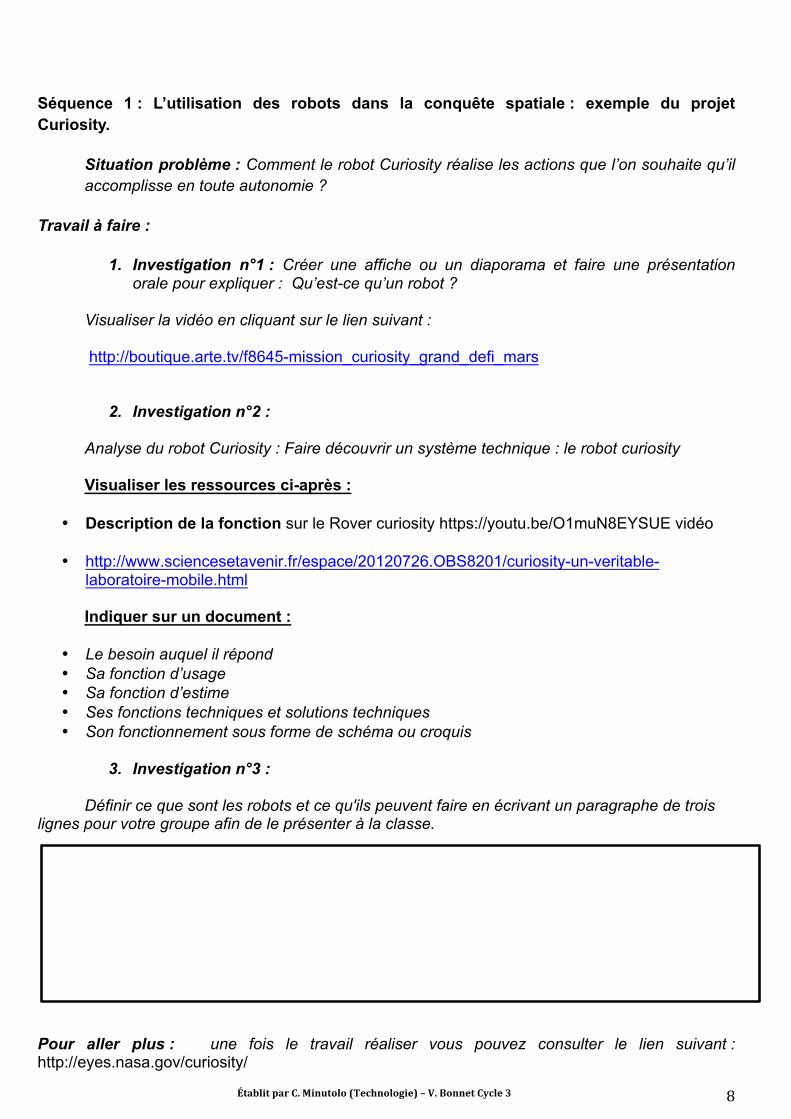
Séquence 1 : L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity.
Situation problème : Comment le robot Curiosity réalise les actions que l’on souhaite qu’il accomplisse en toute autonomie ?
Travail à faire :
1. Investigation n°1 : Créer une affiche ou un diaporama et faire une présentation orale pour expliquer : Qu’est-ce qu’un robot ?
Visualiser la vidéo en cliquant sur le lien suivant : http://boutique.arte.tv/f8645-mission_curiosity_grand_defi_mars
2. Investigation n°2 : Analyse du robot Curiosity : Faire découvrir un système technique : le robot curiosity Visualiser les ressources ci-après :
• Description de la fonction sur le Rover curiosity https://youtu.be/O1muN8EYSUE vidéo
• http://www.sciencesetavenir.fr/espace/20120726.OBS8201/curiosity-un-veritable-
laboratoire-mobile.html Indiquer sur un document :
• Le besoin auquel il répond • Sa fonction d’usage • Sa fonction d’estime • Ses fonctions techniques et solutions techniques • Son fonctionnement sous forme de schéma ou croquis
3. Investigation n°3 :
Définir ce que sont les robots et ce qu'ils peuvent faire en écrivant un paragraphe de trois lignes pour votre groupe afin de le présenter à la classe.
Pour aller plus : une fois le travail réaliser vous pouvez consulter le lien suivant : http://eyes.nasa.gov/curiosity/
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 9
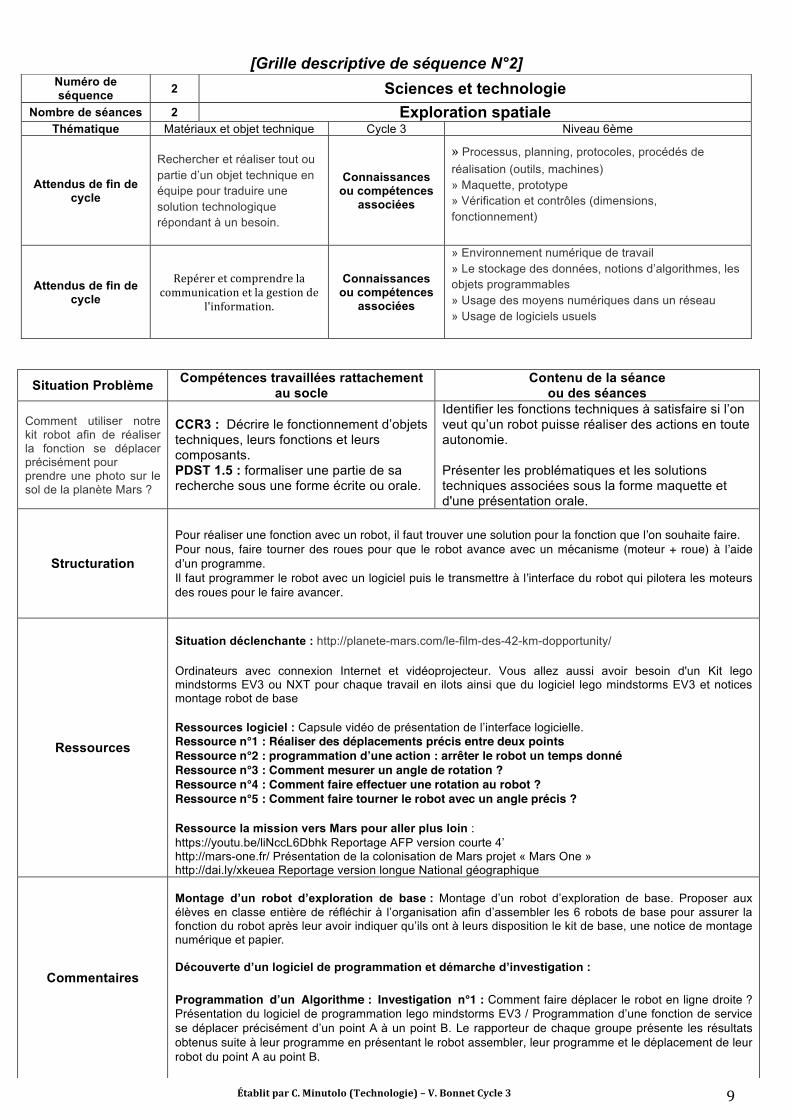
[Grille descriptive de séquence N°2]Numéro de séquence 2 Sciences et technologie
Nombre de séances 2 Exploration spatiale Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Rechercher et réaliser tout ou partie d’un objet technique en équipe pour traduire une solution technologique répondant à un besoin.
Connaissances ou compétences
associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement)
Attendus de fin de cycle
Repéreretcomprendrelacommunicationetlagestionde
l'information.
Connaissances ou compétences
associées
» Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage des moyens numériques dans un réseau » Usage de logiciels usuels
Situation Problème Compétences travaillées rattachement au socle
Contenu de la séance ou des séances
Comment utiliser notre kit robot afin de réaliser la fonction se déplacer précisément pour prendre une photo sur le sol de la planète Mars ?
CCR3 : Décrire le fonctionnement d’objets techniques, leurs fonctions et leurs composants. PDST 1.5 : formaliser une partie de sa recherche sous une forme écrite ou orale.
Identifier les fonctions techniques à satisfaire si l’on veut qu’un robot puisse réaliser des actions en toute autonomie. Présenter les problématiques et les solutions techniques associées sous la forme maquette et d'une présentation orale.
Structuration
Pour réaliser une fonction avec un robot, il faut trouver une solution pour la fonction que l’on souhaite faire. Pour nous, faire tourner des roues pour que le robot avance avec un mécanisme (moteur + roue) à l’aide d’un programme. Il faut programmer le robot avec un logiciel puis le transmettre à l’interface du robot qui pilotera les moteurs des roues pour le faire avancer.
Ressources
• Situation déclenchante : http://planete-mars.com/le-film-des-42-km-dopportunity/ • • Ordinateurs avec connexion Internet et vidéoprojecteur. Vous allez aussi avoir besoin d'un Kit lego
mindstorms EV3 ou NXT pour chaque travail en ilots ainsi que du logiciel lego mindstorms EV3 et notices montage robot de base
• Ressources logiciel : Capsule vidéo de présentation de l’interface logicielle. Ressource n°1 : Réaliser des déplacements précis entre deux points Ressource n°2 : programmation d’une action : arrêter le robot un temps donné Ressource n°3 : Comment mesurer un angle de rotation ? Ressource n°4 : Comment faire effectuer une rotation au robot ? Ressource n°5 : Comment faire tourner le robot avec un angle précis ? Ressource la mission vers Mars pour aller plus loin : https://youtu.be/liNccL6Dbhk Reportage AFP version courte 4’ http://mars-one.fr/ Présentation de la colonisation de Mars projet « Mars One » http://dai.ly/xkeuea Reportage version longue National géographique
Commentaires
Montage d’un robot d’exploration de base : Montage d’un robot d’exploration de base. Proposer aux élèves en classe entière de réfléchir à l’organisation afin d’assembler les 6 robots de base pour assurer la fonction du robot après leur avoir indiquer qu’ils ont à leurs disposition le kit de base, une notice de montage numérique et papier. Découverte d’un logiciel de programmation et démarche d’investigation :
Programmation d’un Algorithme : Investigation n°1 : Comment faire déplacer le robot en ligne droite ? Présentation du logiciel de programmation lego mindstorms EV3 / Programmation d’une fonction de service se déplacer précisément d’un point A à un point B. Le rapporteur de chaque groupe présente les résultats obtenus suite à leur programme en présentant le robot assembler, leur programme et le déplacement de leur robot du point A au point B.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 10
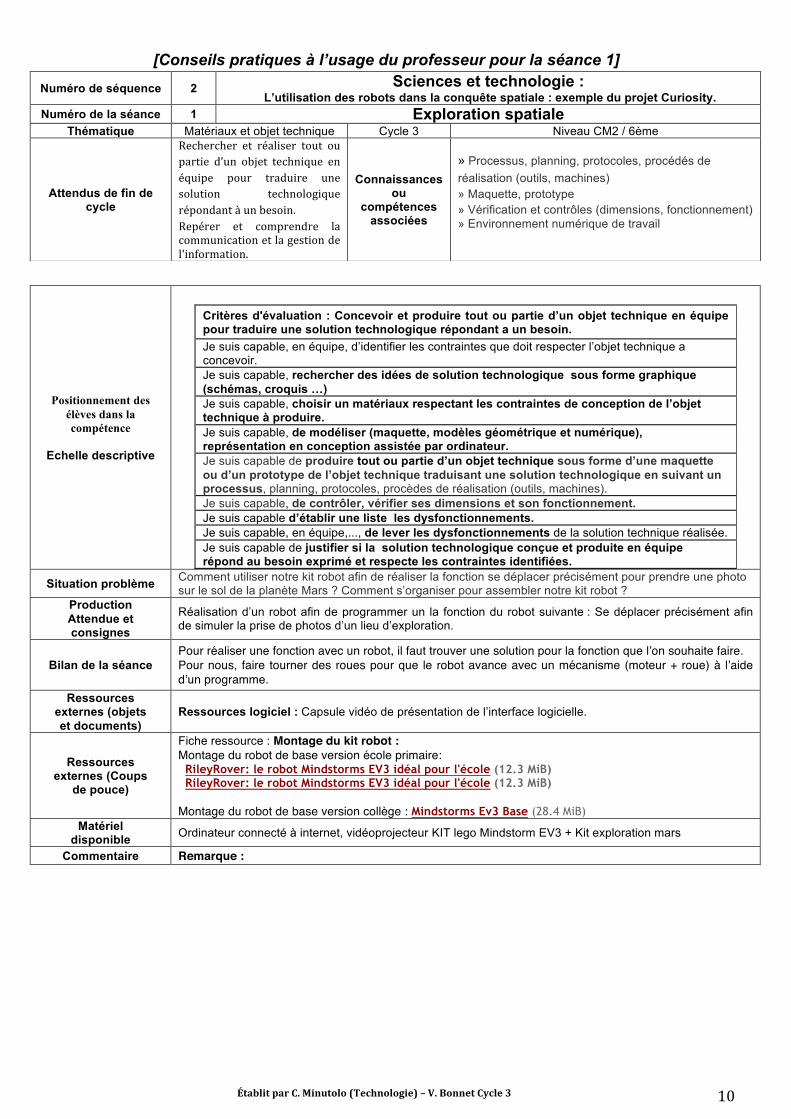
[Conseils pratiques à l’usage du professeur pour la séance 1]
Numéro de séquence 2 Sciences et technologie : L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity.
Numéro de la séance 1 Exploration spatiale Thématique Matériaux et objet technique Cycle 3 Niveau CM2 / 6ème
Attendus de fin de cycle
Rechercher et réaliser tout oupartie d’un objet technique enéquipe pour traduire unesolution technologiquerépondantàunbesoin.Repérer et comprendre lacommunicationetlagestiondel'information.
Connaissances ou
compétences associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement) » Environnement numérique de travail
Positionnement des élèves dans la compétence
Echelle descriptive
Critères d'évaluation : Concevoir et produire tout ou partie d’un objet technique en équipe pour traduire une solution technologique répondant a un besoin. Je suis capable, en équipe, d’identifier les contraintes que doit respecter l’objet technique a concevoir. Je suis capable, rechercher des idées de solution technologique sous forme graphique (schémas, croquis …) Je suis capable, choisir un matériaux respectant les contraintes de conception de l’objet technique à produire. Je suis capable, de modéliser (maquette, modèles géométrique et numérique), représentation en conception assistée par ordinateur. Je suis capable de produire tout ou partie d’un objet technique sous forme d’une maquette ou d’un prototype de l’objet technique traduisant une solution technologique en suivant un processus, planning, protocoles, procèdes de réalisation (outils, machines). Je suis capable, de contrôler, vérifier ses dimensions et son fonctionnement. Je suis capable d’établir une liste les dysfonctionnements. Je suis capable, en équipe,..., de lever les dysfonctionnements de la solution technique réalisée. Je suis capable de justifier si la solution technologique conçue et produite en équipe répond au besoin exprimé et respecte les contraintes identifiées.
Situation problème Comment utiliser notre kit robot afin de réaliser la fonction se déplacer précisément pour prendre une photo sur le sol de la planète Mars ? Comment s’organiser pour assembler notre kit robot ?
Production Attendue et consignes
Réalisation d’un robot afin de programmer un la fonction du robot suivante : Se déplacer précisément afin de simuler la prise de photos d’un lieu d’exploration.
Bilan de la séance Pour réaliser une fonction avec un robot, il faut trouver une solution pour la fonction que l’on souhaite faire. Pour nous, faire tourner des roues pour que le robot avance avec un mécanisme (moteur + roue) à l’aide d’un programme.
Ressources externes (objets et documents)
Ressources logiciel : Capsule vidéo de présentation de l’interface logicielle.
Ressources externes (Coups
de pouce)
Fiche ressource : Montage du kit robot : Montage du robot de base version école primaire: RileyRover: le robot Mindstorms EV3 idéal pour l'école (12.3 MiB) RileyRover: le robot Mindstorms EV3 idéal pour l'école (12.3 MiB) Montage du robot de base version collège : Mindstorms Ev3 Base (28.4 MiB)
Matériel disponible Ordinateur connecté à internet, vidéoprojecteur KIT lego Mindstorm EV3 + Kit exploration mars
Commentaire Remarque :
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 11
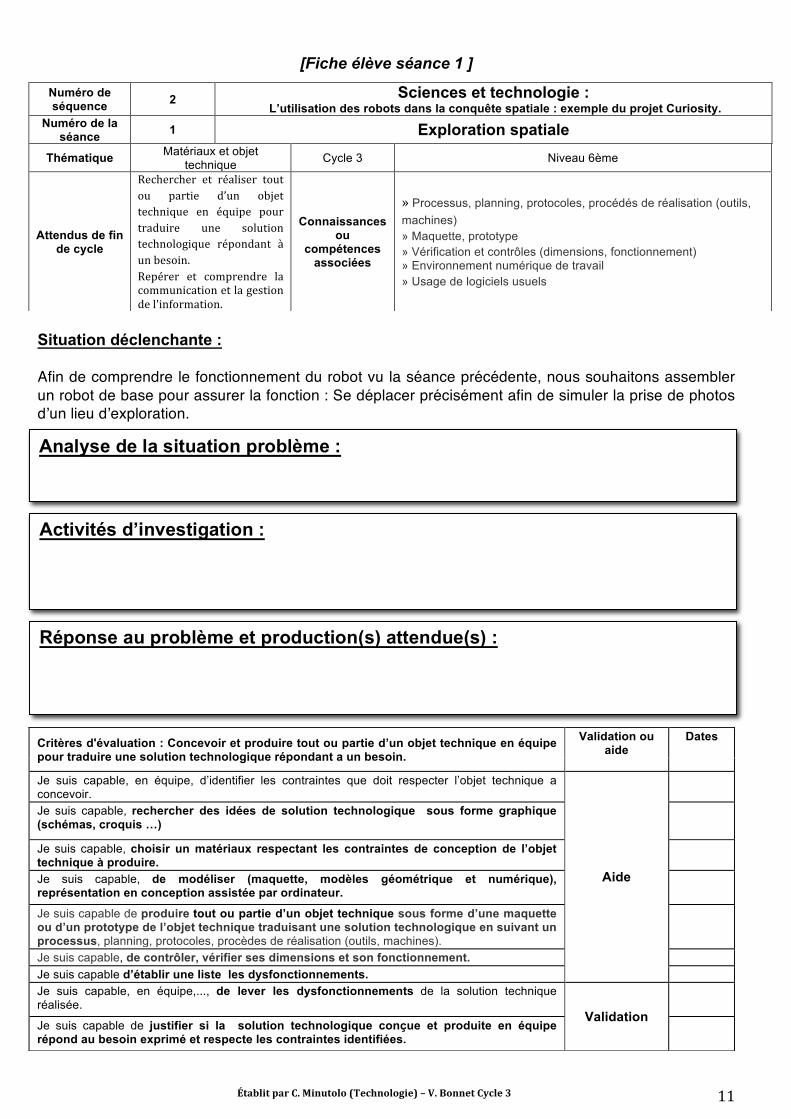
[Fiche élève séance 1 ]
Situation déclenchante : Afin de comprendre le fonctionnement du robot vu la séance précédente, nous souhaitons assembler un robot de base pour assurer la fonction : Se déplacer précisément afin de simuler la prise de photos d’un lieu d’exploration.
Numéro de séquence 2 Sciences et technologie :
L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity. Numéro de la
séance 1 Exploration spatiale
Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Rechercher et réaliser toutou partie d’un objettechnique en équipe pourtraduire une solutiontechnologique répondant àunbesoin.Repérer et comprendre lacommunicationetlagestiondel'information.
Connaissances ou
compétences associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement) » Environnement numérique de travail » Usage de logiciels usuels
Critères d'évaluation : Concevoir et produire tout ou partie d’un objet technique en équipe pour traduire une solution technologique répondant a un besoin.
Validation ou aide
Dates
Je suis capable, en équipe, d’identifier les contraintes que doit respecter l’objet technique a concevoir.
Aide
Je suis capable, rechercher des idées de solution technologique sous forme graphique (schémas, croquis …)
Je suis capable, choisir un matériaux respectant les contraintes de conception de l’objet technique à produire.
Je suis capable, de modéliser (maquette, modèles géométrique et numérique), représentation en conception assistée par ordinateur.
Je suis capable de produire tout ou partie d’un objet technique sous forme d’une maquette ou d’un prototype de l’objet technique traduisant une solution technologique en suivant un processus, planning, protocoles, procèdes de réalisation (outils, machines).
Je suis capable, de contrôler, vérifier ses dimensions et son fonctionnement. Je suis capable d’établir une liste les dysfonctionnements. Je suis capable, en équipe,..., de lever les dysfonctionnements de la solution technique réalisée.
Validation
Je suis capable de justifier si la solution technologique conçue et produite en équipe répond au besoin exprimé et respecte les contraintes identifiées.
Analyse de la situation problème :
Activités d’investigation :
Réponse au problème et production(s) attendue(s) :

ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 12
Investigation n°2 : Comment s’organiser pour assembler notre kit robot ?
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 13
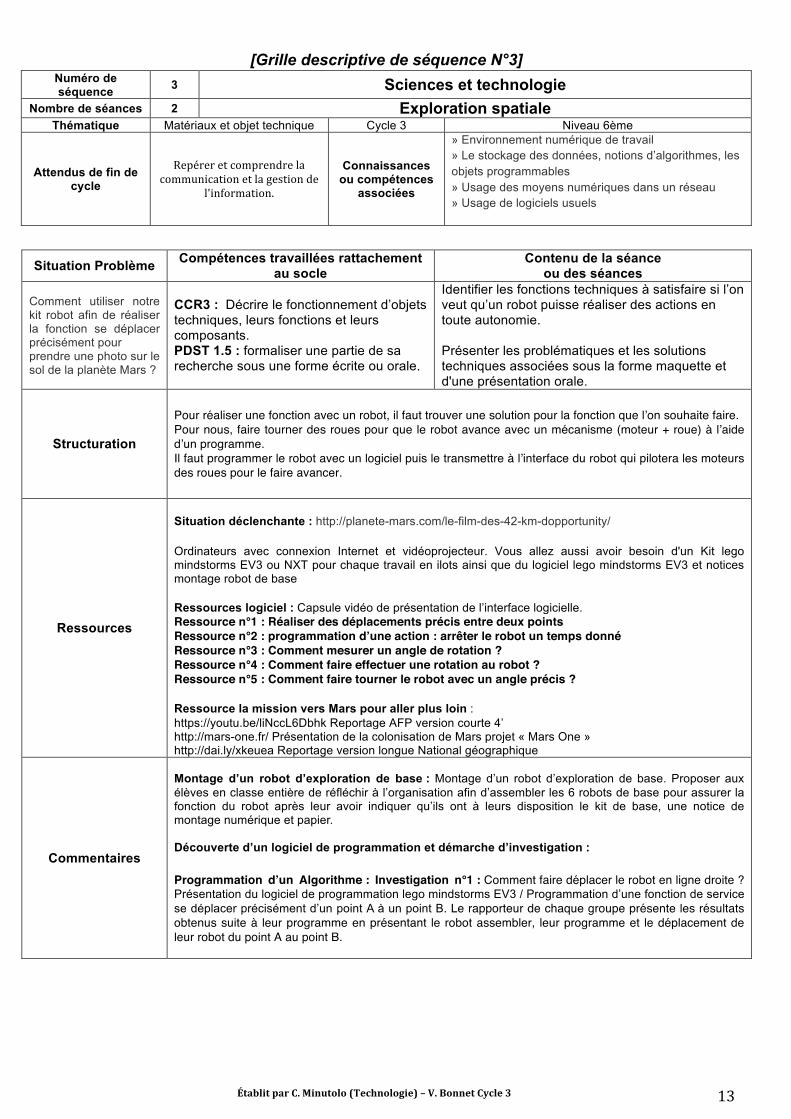
[Grille descriptive de séquence N°3]Numéro de séquence 3 Sciences et technologie
Nombre de séances 2 Exploration spatiale Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Repéreretcomprendrelacommunicationetlagestionde
l'information.
Connaissances ou compétences
associées
» Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage des moyens numériques dans un réseau » Usage de logiciels usuels
Situation Problème Compétences travaillées rattachement au socle
Contenu de la séance ou des séances
Comment utiliser notre kit robot afin de réaliser la fonction se déplacer précisément pour prendre une photo sur le sol de la planète Mars ?
CCR3 : Décrire le fonctionnement d’objets techniques, leurs fonctions et leurs composants. PDST 1.5 : formaliser une partie de sa recherche sous une forme écrite ou orale.
Identifier les fonctions techniques à satisfaire si l’on veut qu’un robot puisse réaliser des actions en toute autonomie. Présenter les problématiques et les solutions techniques associées sous la forme maquette et d'une présentation orale.
Structuration
Pour réaliser une fonction avec un robot, il faut trouver une solution pour la fonction que l’on souhaite faire. Pour nous, faire tourner des roues pour que le robot avance avec un mécanisme (moteur + roue) à l’aide d’un programme. Il faut programmer le robot avec un logiciel puis le transmettre à l’interface du robot qui pilotera les moteurs des roues pour le faire avancer.
Ressources
• Situation déclenchante : http://planete-mars.com/le-film-des-42-km-dopportunity/ • • Ordinateurs avec connexion Internet et vidéoprojecteur. Vous allez aussi avoir besoin d'un Kit lego
mindstorms EV3 ou NXT pour chaque travail en ilots ainsi que du logiciel lego mindstorms EV3 et notices montage robot de base
• Ressources logiciel : Capsule vidéo de présentation de l’interface logicielle. Ressource n°1 : Réaliser des déplacements précis entre deux points Ressource n°2 : programmation d’une action : arrêter le robot un temps donné Ressource n°3 : Comment mesurer un angle de rotation ? Ressource n°4 : Comment faire effectuer une rotation au robot ? Ressource n°5 : Comment faire tourner le robot avec un angle précis ? Ressource la mission vers Mars pour aller plus loin : https://youtu.be/liNccL6Dbhk Reportage AFP version courte 4’ http://mars-one.fr/ Présentation de la colonisation de Mars projet « Mars One » http://dai.ly/xkeuea Reportage version longue National géographique
Commentaires
Montage d’un robot d’exploration de base : Montage d’un robot d’exploration de base. Proposer aux élèves en classe entière de réfléchir à l’organisation afin d’assembler les 6 robots de base pour assurer la fonction du robot après leur avoir indiquer qu’ils ont à leurs disposition le kit de base, une notice de montage numérique et papier. Découverte d’un logiciel de programmation et démarche d’investigation :
Programmation d’un Algorithme : Investigation n°1 : Comment faire déplacer le robot en ligne droite ? Présentation du logiciel de programmation lego mindstorms EV3 / Programmation d’une fonction de service se déplacer précisément d’un point A à un point B. Le rapporteur de chaque groupe présente les résultats obtenus suite à leur programme en présentant le robot assembler, leur programme et le déplacement de leur robot du point A au point B.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 14
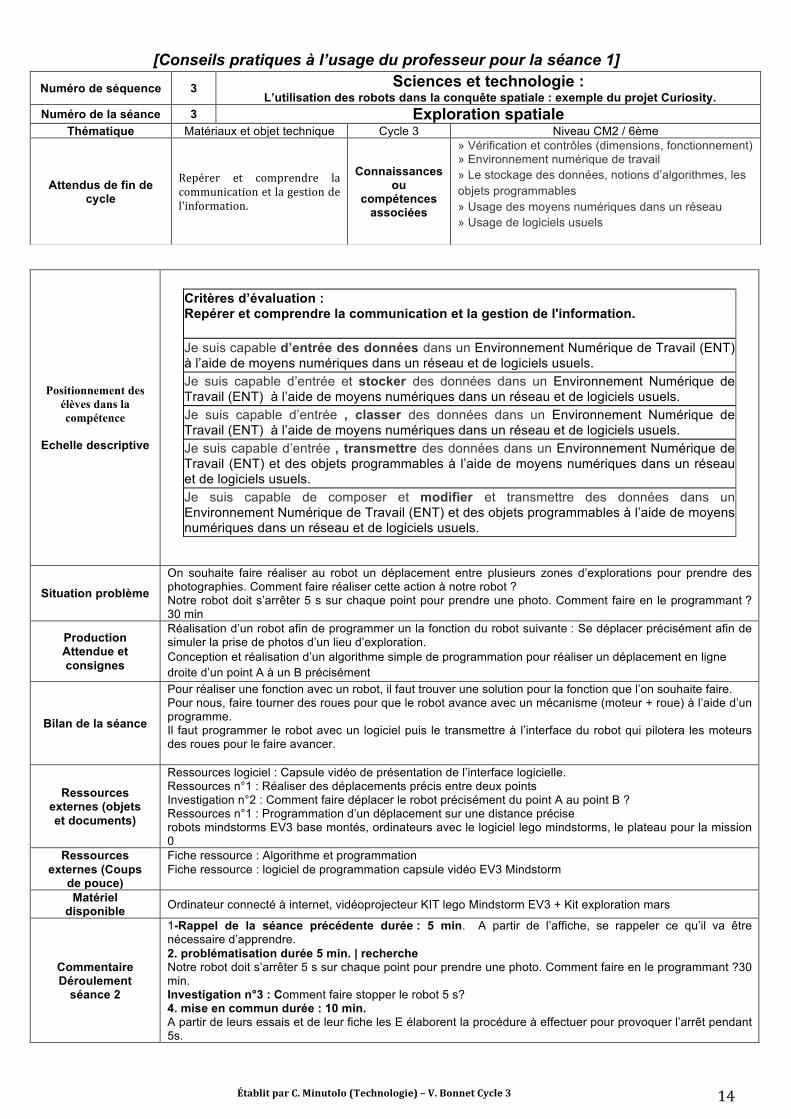
[Conseils pratiques à l’usage du professeur pour la séance 1]
Numéro de séquence 3 Sciences et technologie : L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity.
Numéro de la séance 3 Exploration spatiale Thématique Matériaux et objet technique Cycle 3 Niveau CM2 / 6ème
Attendus de fin de cycle
Repérer et comprendre lacommunicationetlagestiondel'information.
Connaissances ou
compétences associées
» Vérification et contrôles (dimensions, fonctionnement) » Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage des moyens numériques dans un réseau » Usage de logiciels usuels
Positionnement des élèves dans la compétence
Echelle descriptive
Critères d’évaluation : Repérer et comprendre la communication et la gestion de l'information. Je suis capable d’entrée des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels. Je suis capable d’entrée et stocker des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels. Je suis capable d’entrée , classer des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels. Je suis capable d’entrée , transmettre des données dans un Environnement Numérique de Travail (ENT) et des objets programmables à l’aide de moyens numériques dans un réseau et de logiciels usuels. Je suis capable de composer et modifier et transmettre des données dans un Environnement Numérique de Travail (ENT) et des objets programmables à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Situation problème On souhaite faire réaliser au robot un déplacement entre plusieurs zones d’explorations pour prendre des photographies. Comment faire réaliser cette action à notre robot ? Notre robot doit s’arrêter 5 s sur chaque point pour prendre une photo. Comment faire en le programmant ? 30 min
Production Attendue et consignes
Réalisation d’un robot afin de programmer un la fonction du robot suivante : Se déplacer précisément afin de simuler la prise de photos d’un lieu d’exploration. Conception et réalisation d’un algorithme simple de programmation pour réaliser un déplacement en ligne droite d’un point A à un B précisément
Bilan de la séance
Pour réaliser une fonction avec un robot, il faut trouver une solution pour la fonction que l’on souhaite faire. Pour nous, faire tourner des roues pour que le robot avance avec un mécanisme (moteur + roue) à l’aide d’un programme. Il faut programmer le robot avec un logiciel puis le transmettre à l’interface du robot qui pilotera les moteurs des roues pour le faire avancer.
Ressources externes (objets et documents)
Ressources logiciel : Capsule vidéo de présentation de l’interface logicielle. Ressources n°1 : Réaliser des déplacements précis entre deux points Investigation n°2 : Comment faire déplacer le robot précisément du point A au point B ? Ressources n°1 : Programmation d’un déplacement sur une distance précise robots mindstorms EV3 base montés, ordinateurs avec le logiciel lego mindstorms, le plateau pour la mission 0
Ressources externes (Coups
de pouce)
Fiche ressource : Algorithme et programmation Fiche ressource : logiciel de programmation capsule vidéo EV3 Mindstorm
Matériel disponible Ordinateur connecté à internet, vidéoprojecteur KIT lego Mindstorm EV3 + Kit exploration mars
Commentaire Déroulement
séance 2
1-Rappel de la séance précédente durée : 5 min. A partir de l’affiche, se rappeler ce qu’il va être nécessaire d’apprendre. 2. problématisation durée 5 min. | recherche Notre robot doit s’arrêter 5 s sur chaque point pour prendre une photo. Comment faire en le programmant ?30 min. Investigation n°3 : Comment faire stopper le robot 5 s? 4. mise en commun durée : 10 min. A partir de leurs essais et de leur fiche les E élaborent la procédure à effectuer pour provoquer l’arrêt pendant 5s.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 15
[Fiche élève séance 1]
Situation déclenchante :
Nous avons assemblé notre robot en classe. On souhaite faire réaliser au robot un déplacement entre plusieurs zones d’explorations pour prendre des photographies. Notre robot doit s’arrêter 5 s sur chaque point pour prendre une photo.
Numéro de séquence 3 Sciences et technologie :
L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity. Numéro de la
séance 1 Exploration spatiale
Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Rechercher et réaliser toutou partie d’un objettechnique en équipe pourtraduire une solutiontechnologique répondant àunbesoin.Repérer et comprendre lacommunicationetlagestiondel'information.
Connaissances ou
compétences associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement) » Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage de logiciels usuels
Critères d’évaluation : Repérer et comprendre la communication et la gestion de l'information.
Validation ou aide
Dates
Je suis capable d’entrée des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels.
aide
Je suis capable d’entrée et stocker des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Je suis capable d’entrée , classer des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Je suis capable d’entrée , transmettre des données dans un Environnement Numérique de Travail (ENT) et des objets programmables à l’aide de moyens numériques dans un réseau et de logiciels usuels. Validation
Je suis capable de composer et modifier et transmettre des données dans un Environnement Numérique de Travail (ENT) et des objets programmables à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Analyse de la situation problème :
Activités d’investigation :
Réponse au problème et production(s) attendue(s) :
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 16
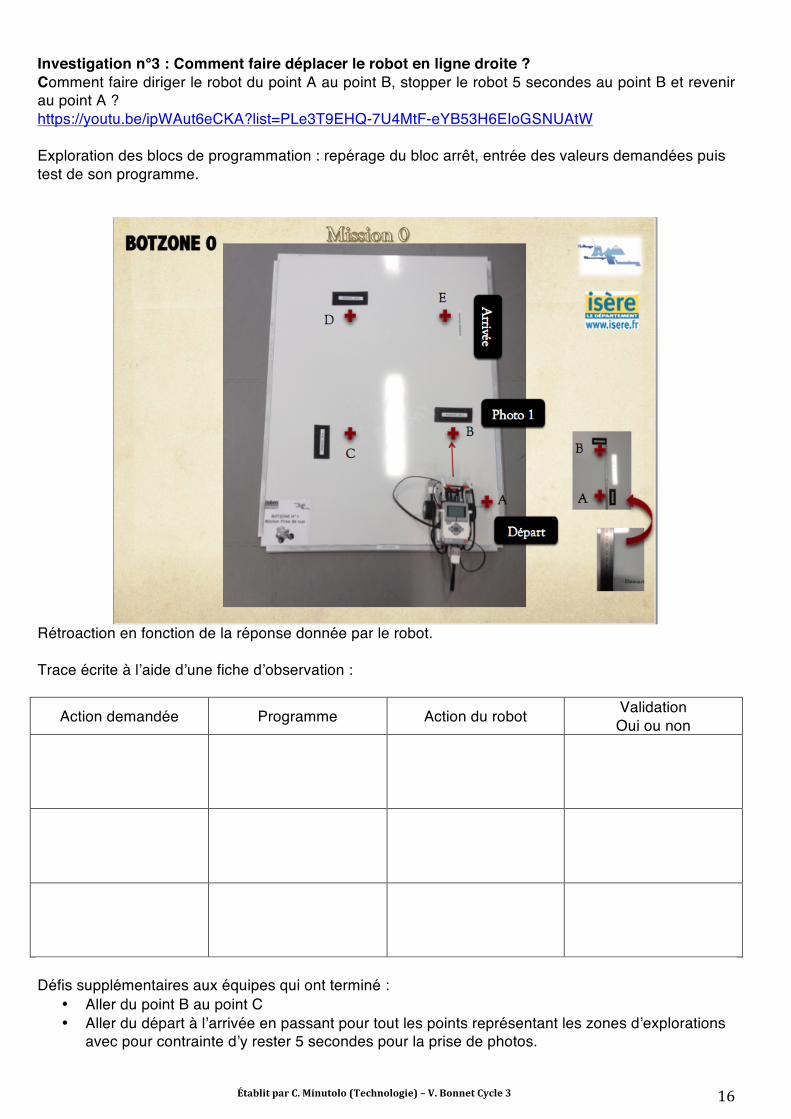
Investigation n°3 : Comment faire déplacer le robot en ligne droite ? Comment faire diriger le robot du point A au point B, stopper le robot 5 secondes au point B et revenir au point A ? https://youtu.be/ipWAut6eCKA?list=PLe3T9EHQ-7U4MtF-eYB53H6EIoGSNUAtW Exploration des blocs de programmation : repérage du bloc arrêt, entrée des valeurs demandées puis test de son programme.
Rétroaction en fonction de la réponse donnée par le robot. Trace écrite à l’aide d’une fiche d’observation :
Action demandée Programme Action du robot Validation Oui ou non
Défis supplémentaires aux équipes qui ont terminé :
• Aller du point B au point C • Aller du départ à l’arrivée en passant pour tout les points représentant les zones d’explorations
avec pour contrainte d’y rester 5 secondes pour la prise de photos.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 17
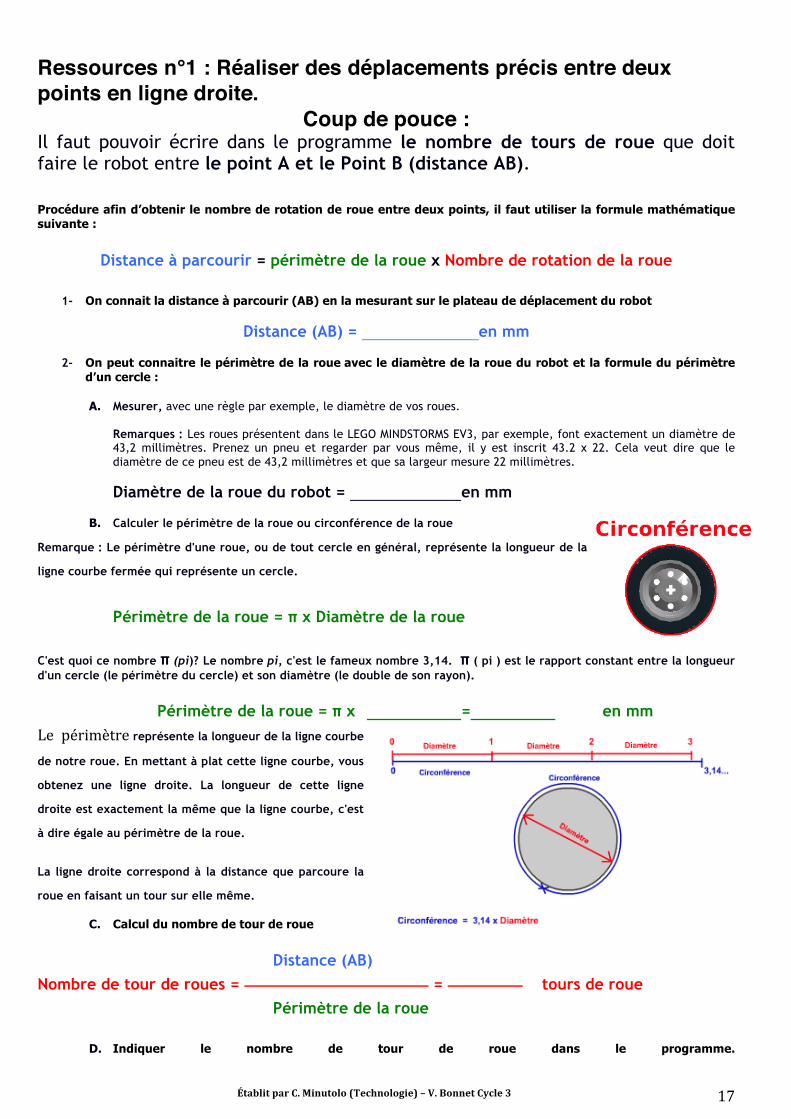
Ressources n°1 : Réaliser des déplacements précis entre deux points en ligne droite.
Coup de pouce : Il faut pouvoir écrire dans le programme le nombre de tours de roue que doit faire le robot entre le point A et le Point B (distance AB).
Procédure afin d’obtenir le nombre de rotation de roue entre deux points, il faut utiliser la formule mathématique suivante :
Distance à parcourir = périmètre de la roue x Nombre de rotation de la roue
1- On connait la distance à parcourir (AB) en la mesurant sur le plateau de déplacement du robot
Distance (AB) = en mm
2- On peut connaitre le périmètre de la roue avec le diamètre de la roue du robot et la formule du périmètre
d’un cercle :
A. Mesurer, avec une règle par exemple, le diamètre de vos roues.
Remarques : Les roues présentent dans le LEGO MINDSTORMS EV3, par exemple, font exactement un diamètre de 43,2 millimètres. Prenez un pneu et regarder par vous même, il y est inscrit 43.2 x 22. Cela veut dire que le diamètre de ce pneu est de 43,2 millimètres et que sa largeur mesure 22 millimètres.
Diamètre de la roue du robot = en mm
B. Calculer le périmètre de la roue ou circonférence de la roue
Remarque : Le périmètre d'une roue, ou de tout cercle en général, représente la longueur de la
ligne courbe fermée qui représente un cercle.
Périmètre de la roue = π x Diamètre de la roue
C'est quoi ce nombre π (pi)? Le nombre pi, c'est le fameux nombre 3,14. π ( pi ) est le rapport constant entre la longueur
d'un cercle (le périmètre du cercle) et son diamètre (le double de son rayon).
Périmètre de la roue = π x = en mm
Le périmètre représente la longueur de la ligne courbe
de notre roue. En mettant à plat cette ligne courbe, vous
obtenez une ligne droite. La longueur de cette ligne
droite est exactement la même que la ligne courbe, c'est
à dire égale au périmètre de la roue.
La ligne droite correspond à la distance que parcoure la
roue en faisant un tour sur elle même.
C. Calcul du nombre de tour de roue
Distance (AB)
Nombre de tour de roues = = tours de roue
Périmètre de la roue
D. Indiquer le nombre de tour de roue dans le programme.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 18
Ressources n°2 : programmation d’une action : arrêter le robot un temps donné
Coup de pouce : Il faut pouvoir écrire dans le programme une temporisation
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 19
[Fiche élève séance 3]
Situation déclenchante : Nous avons assemblé notre robot en classe. On souhaite faire réaliser au robot un déplacement entre plusieurs zones d’explorations pour prendre des photographies. Les zones d’explorations sont atteignables pour notre robot à condition qu’il puisse réaliser d’autre déplacement qu’en ligne droite. Il doit parvenir sur ses points en réalisant déplacement les plus court possible afin de réaliser des économie d’énergie.
Numéro de séquence 2 Sciences et technologie :
L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity. Numéro de la
séance 3 Exploration spatiale
Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Rechercher et réaliser toutou partie d’un objettechnique en équipe pourtraduire une solutiontechnologique répondant àunbesoin.Repérer et comprendre lacommunicationetlagestiondel'information.
Connaissances ou
compétences associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement) » Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage de logiciels usuels
Critères d’évaluation : Repérer et comprendre la communication et la gestion de l'information.
Validation ou aide
Dates
Je suis capable d’entrée des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels.
aide
Je suis capable d’entrée et stocker des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Je suis capable d’entrée , classer des données dans un Environnement Numérique de Travail (ENT) à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Je suis capable d’entrée , transmettre des données dans un Environnement Numérique de Travail (ENT) et des objets programmables à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Validation
Je suis capable de composer et modifier et transmettre des données dans un Environnement Numérique de Travail (ENT) et des objets programmables à l’aide de moyens numériques dans un réseau et de logiciels usuels.
Analyse de la situation problème :
Activités d’investigation :
Réponse au problème et production(s) attendue(s) :
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 20
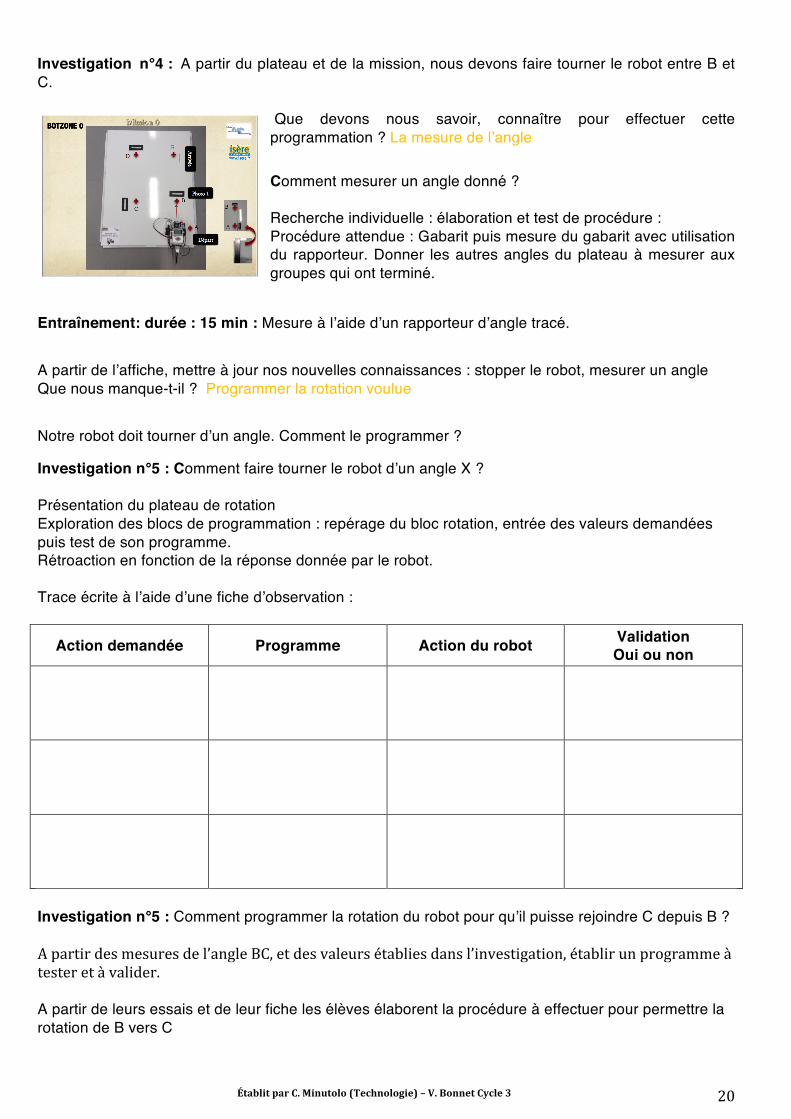
Investigation n°4 : A partir du plateau et de la mission, nous devons faire tourner le robot entre B et C.
Que devons nous savoir, connaître pour effectuer cette programmation ? La mesure de l’angle Comment mesurer un angle donné ? Recherche individuelle : élaboration et test de procédure : Procédure attendue : Gabarit puis mesure du gabarit avec utilisation du rapporteur. Donner les autres angles du plateau à mesurer aux groupes qui ont terminé.
Entraînement: durée : 15 min : Mesure à l’aide d’un rapporteur d’angle tracé. A partir de l’affiche, mettre à jour nos nouvelles connaissances : stopper le robot, mesurer un angle Que nous manque-t-il ? Programmer la rotation voulue Notre robot doit tourner d’un angle. Comment le programmer ? Investigation n°5 : Comment faire tourner le robot d’un angle X ? Présentation du plateau de rotation Exploration des blocs de programmation : repérage du bloc rotation, entrée des valeurs demandées puis test de son programme. Rétroaction en fonction de la réponse donnée par le robot. Trace écrite à l’aide d’une fiche d’observation :
Action demandée Programme Action du robot Validation Oui ou non
Investigation n°5 : Comment programmer la rotation du robot pour qu’il puisse rejoindre C depuis B ? Apartirdesmesuresdel’angleBC,etdesvaleursétabliesdansl’investigation,établirunprogrammeàtesteretàvalider. A partir de leurs essais et de leur fiche les élèves élaborent la procédure à effectuer pour permettre la rotation de B vers C
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 21
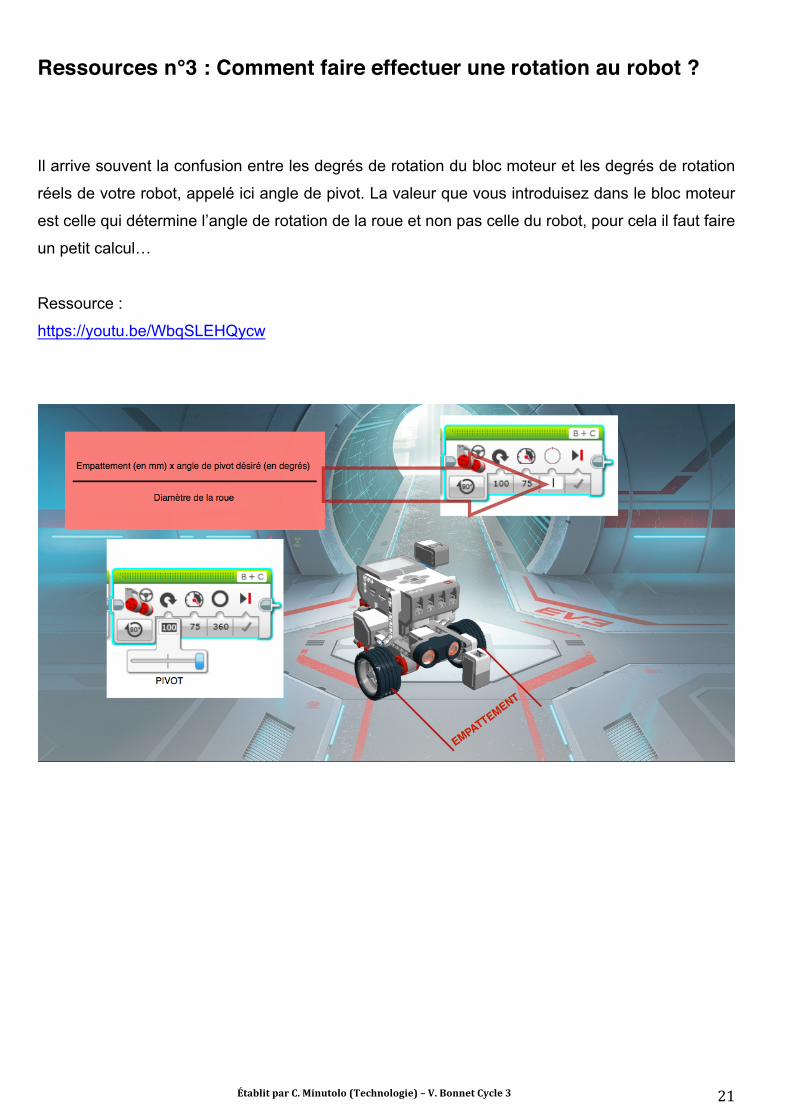
Ressources n°3 : Comment faire effectuer une rotation au robot ? Il arrive souvent la confusion entre les degrés de rotation du bloc moteur et les degrés de rotation
réels de votre robot, appelé ici angle de pivot. La valeur que vous introduisez dans le bloc moteur
est celle qui détermine l’angle de rotation de la roue et non pas celle du robot, pour cela il faut faire
un petit calcul…
Ressource :
https://youtu.be/WbqSLEHQycw
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 22
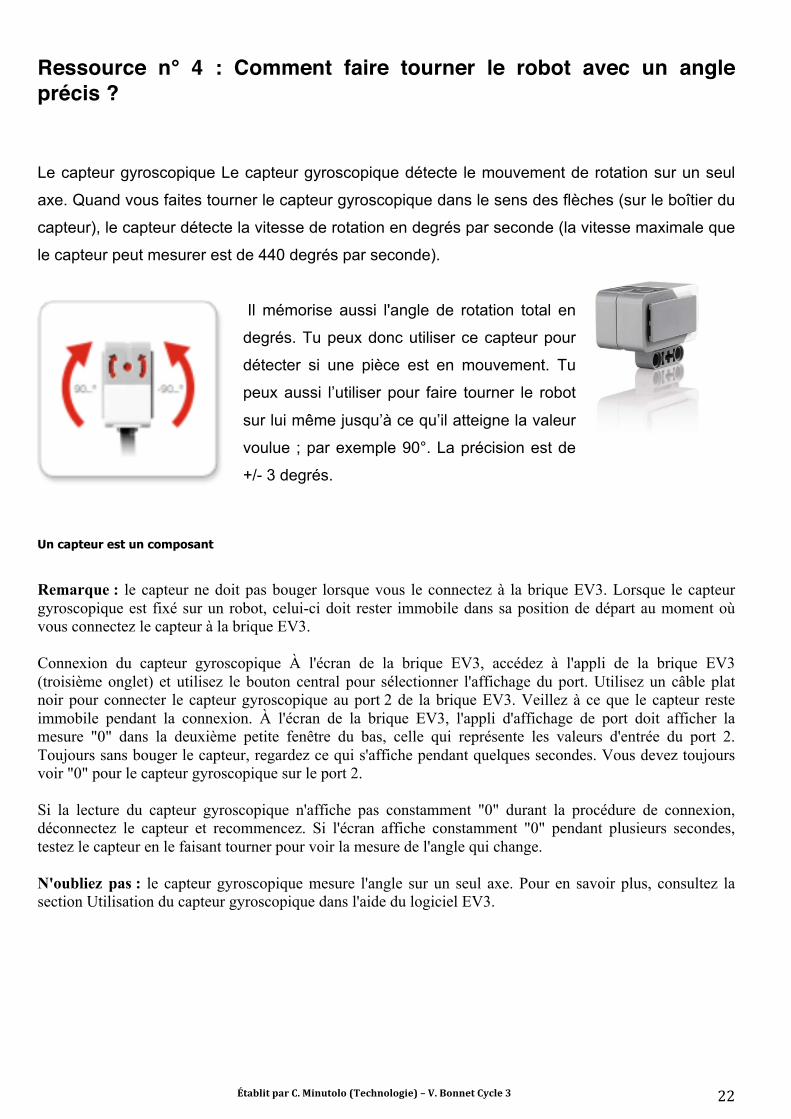
Ressource n° 4 : Comment faire tourner le robot avec un angle précis ? Le capteur gyroscopique Le capteur gyroscopique détecte le mouvement de rotation sur un seul
axe. Quand vous faites tourner le capteur gyroscopique dans le sens des flèches (sur le boîtier du
capteur), le capteur détecte la vitesse de rotation en degrés par seconde (la vitesse maximale que
le capteur peut mesurer est de 440 degrés par seconde).
Il mémorise aussi l'angle de rotation total en
degrés. Tu peux donc utiliser ce capteur pour
détecter si une pièce est en mouvement. Tu
peux aussi l’utiliser pour faire tourner le robot
sur lui même jusqu’à ce qu’il atteigne la valeur
voulue ; par exemple 90°. La précision est de
+/- 3 degrés. Un capteur est un composant Remarque : le capteur ne doit pas bouger lorsque vous le connectez à la brique EV3. Lorsque le capteur gyroscopique est fixé sur un robot, celui-ci doit rester immobile dans sa position de départ au moment où vous connectez le capteur à la brique EV3. Connexion du capteur gyroscopique À l'écran de la brique EV3, accédez à l'appli de la brique EV3 (troisième onglet) et utilisez le bouton central pour sélectionner l'affichage du port. Utilisez un câble plat noir pour connecter le capteur gyroscopique au port 2 de la brique EV3. Veillez à ce que le capteur reste immobile pendant la connexion. À l'écran de la brique EV3, l'appli d'affichage de port doit afficher la mesure "0" dans la deuxième petite fenêtre du bas, celle qui représente les valeurs d'entrée du port 2. Toujours sans bouger le capteur, regardez ce qui s'affiche pendant quelques secondes. Vous devez toujours voir "0" pour le capteur gyroscopique sur le port 2. Si la lecture du capteur gyroscopique n'affiche pas constamment "0" durant la procédure de connexion, déconnectez le capteur et recommencez. Si l'écran affiche constamment "0" pendant plusieurs secondes, testez le capteur en le faisant tourner pour voir la mesure de l'angle qui change. N'oubliez pas : le capteur gyroscopique mesure l'angle sur un seul axe. Pour en savoir plus, consultez la section Utilisation du capteur gyroscopique dans l'aide du logiciel EV3.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 23
[Grille descriptive de séquence N°4]Numéro de séquence 4 Sciences et technologie
Nombre de séances 1 Exploration spatiale Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
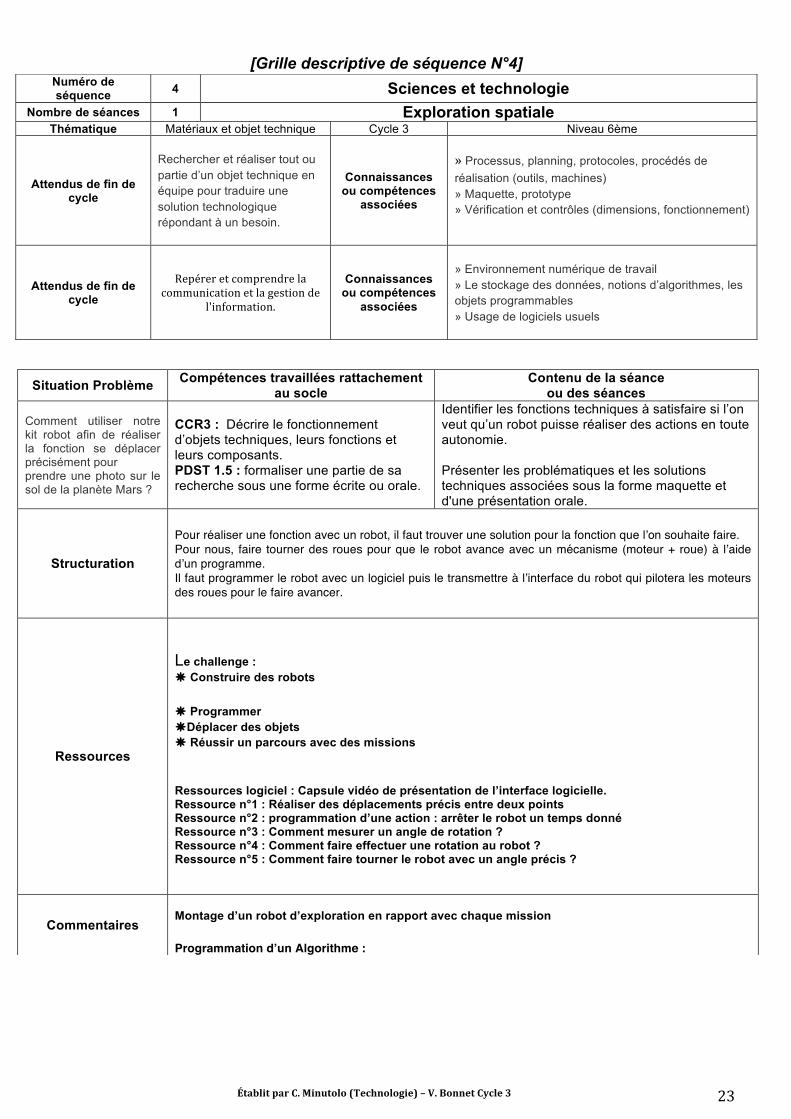
Rechercher et réaliser tout ou partie d’un objet technique en équipe pour traduire une solution technologique répondant à un besoin.
Connaissances ou compétences
associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement)
Attendus de fin de cycle
Repéreretcomprendrelacommunicationetlagestionde
l'information.
Connaissances ou compétences
associées
» Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage de logiciels usuels
Situation Problème Compétences travaillées rattachement au socle
Contenu de la séance ou des séances
Comment utiliser notre kit robot afin de réaliser la fonction se déplacer précisément pour prendre une photo sur le sol de la planète Mars ?
CCR3 : Décrire le fonctionnement d’objets techniques, leurs fonctions et leurs composants. PDST 1.5 : formaliser une partie de sa recherche sous une forme écrite ou orale.
Identifier les fonctions techniques à satisfaire si l’on veut qu’un robot puisse réaliser des actions en toute autonomie. Présenter les problématiques et les solutions techniques associées sous la forme maquette et d'une présentation orale.
Structuration
Pour réaliser une fonction avec un robot, il faut trouver une solution pour la fonction que l’on souhaite faire. Pour nous, faire tourner des roues pour que le robot avance avec un mécanisme (moteur + roue) à l’aide d’un programme. Il faut programmer le robot avec un logiciel puis le transmettre à l’interface du robot qui pilotera les moteurs des roues pour le faire avancer.
Ressources
Le challenge : � Construire des robots
� Programmer • �Déplacer des objets • � Réussir un parcours avec des missions •
Ressources logiciel : Capsule vidéo de présentation de l’interface logicielle. Ressource n°1 : Réaliser des déplacements précis entre deux points Ressource n°2 : programmation d’une action : arrêter le robot un temps donné Ressource n°3 : Comment mesurer un angle de rotation ? Ressource n°4 : Comment faire effectuer une rotation au robot ? Ressource n°5 : Comment faire tourner le robot avec un angle précis ?
Commentaires
Montage d’un robot d’exploration en rapport avec chaque mission
Programmation d’un Algorithme :
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 24
[Conseils pratiques à l’usage du professeur pour la séance 1]
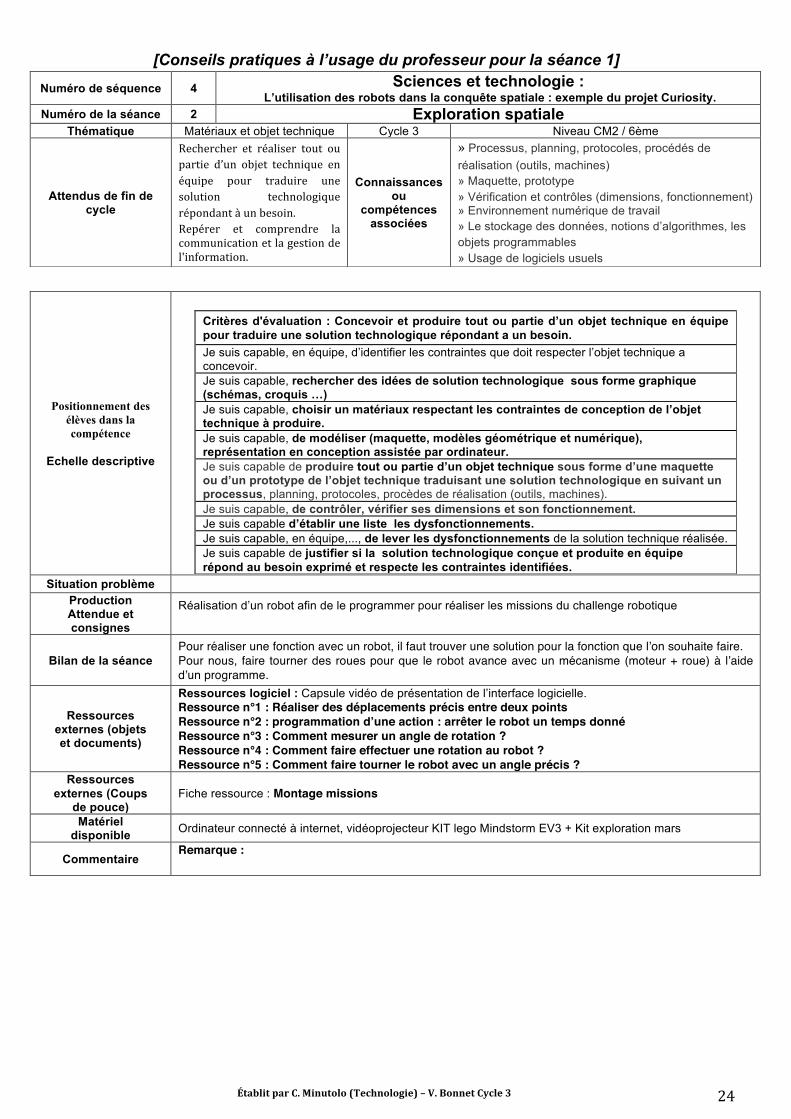
Numéro de séquence 4 Sciences et technologie : L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity.
Numéro de la séance 2 Exploration spatiale Thématique Matériaux et objet technique Cycle 3 Niveau CM2 / 6ème
Attendus de fin de cycle
Rechercher et réaliser tout oupartie d’un objet technique enéquipe pour traduire unesolution technologiquerépondantàunbesoin.Repérer et comprendre lacommunicationetlagestiondel'information.
Connaissances ou
compétences associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement) » Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage de logiciels usuels
Positionnement des élèves dans la compétence
Echelle descriptive
Critères d'évaluation : Concevoir et produire tout ou partie d’un objet technique en équipe pour traduire une solution technologique répondant a un besoin. Je suis capable, en équipe, d’identifier les contraintes que doit respecter l’objet technique a concevoir. Je suis capable, rechercher des idées de solution technologique sous forme graphique (schémas, croquis …) Je suis capable, choisir un matériaux respectant les contraintes de conception de l’objet technique à produire. Je suis capable, de modéliser (maquette, modèles géométrique et numérique), représentation en conception assistée par ordinateur. Je suis capable de produire tout ou partie d’un objet technique sous forme d’une maquette ou d’un prototype de l’objet technique traduisant une solution technologique en suivant un processus, planning, protocoles, procèdes de réalisation (outils, machines). Je suis capable, de contrôler, vérifier ses dimensions et son fonctionnement. Je suis capable d’établir une liste les dysfonctionnements. Je suis capable, en équipe,..., de lever les dysfonctionnements de la solution technique réalisée. Je suis capable de justifier si la solution technologique conçue et produite en équipe répond au besoin exprimé et respecte les contraintes identifiées.
Situation problème Production Attendue et consignes
Réalisation d’un robot afin de le programmer pour réaliser les missions du challenge robotique
Bilan de la séance Pour réaliser une fonction avec un robot, il faut trouver une solution pour la fonction que l’on souhaite faire. Pour nous, faire tourner des roues pour que le robot avance avec un mécanisme (moteur + roue) à l’aide d’un programme.
Ressources externes (objets et documents)
Ressources logiciel : Capsule vidéo de présentation de l’interface logicielle. Ressource n°1 : Réaliser des déplacements précis entre deux points Ressource n°2 : programmation d’une action : arrêter le robot un temps donné Ressource n°3 : Comment mesurer un angle de rotation ? Ressource n°4 : Comment faire effectuer une rotation au robot ? Ressource n°5 : Comment faire tourner le robot avec un angle précis ?
Ressources externes (Coups
de pouce) Fiche ressource : Montage missions
Matériel disponible Ordinateur connecté à internet, vidéoprojecteur KIT lego Mindstorm EV3 + Kit exploration mars
Commentaire Remarque :
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 25
[Fiche élève séance 1]
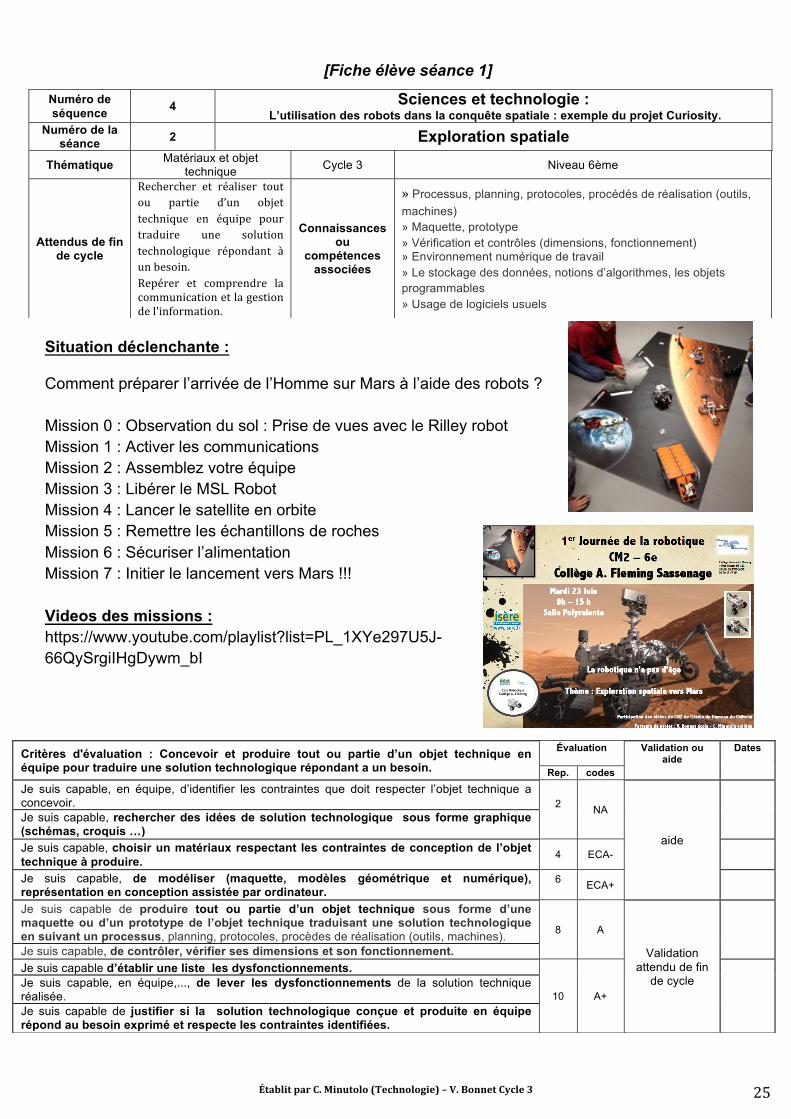
Situation déclenchante : Comment préparer l’arrivée de l’Homme sur Mars à l’aide des robots ? Mission 0 : Observation du sol : Prise de vues avec le Rilley robot Mission 1 : Activer les communications Mission 2 : Assemblez votre équipe Mission 3 : Libérer le MSL Robot Mission 4 : Lancer le satellite en orbite Mission 5 : Remettre les échantillons de roches Mission 6 : Sécuriser l’alimentation Mission 7 : Initier le lancement vers Mars !!!Videos des missions : https://www.youtube.com/playlist?list=PL_1XYe297U5J-66QySrgiIHgDywm_bI
Numéro de séquence 4 Sciences et technologie :
L’utilisation des robots dans la conquête spatiale : exemple du projet Curiosity. Numéro de la
séance 2 Exploration spatiale
Thématique Matériaux et objet technique Cycle 3 Niveau 6ème
Attendus de fin de cycle
Rechercher et réaliser toutou partie d’un objettechnique en équipe pourtraduire une solutiontechnologique répondant àunbesoin.Repérer et comprendre lacommunicationetlagestiondel'information.
Connaissances ou
compétences associées
» Processus, planning, protocoles, procédés de réalisation (outils, machines) » Maquette, prototype » Vérification et contrôles (dimensions, fonctionnement) » Environnement numérique de travail » Le stockage des données, notions d’algorithmes, les objets programmables » Usage de logiciels usuels
Critères d'évaluation : Concevoir et produire tout ou partie d’un objet technique en équipe pour traduire une solution technologique répondant a un besoin.
Évaluation Validation ou aide
Dates
Rep. codes Je suis capable, en équipe, d’identifier les contraintes que doit respecter l’objet technique a concevoir. 2
NA
aide
Je suis capable, rechercher des idées de solution technologique sous forme graphique (schémas, croquis …) Je suis capable, choisir un matériaux respectant les contraintes de conception de l’objet technique à produire. 4 ECA-
Je suis capable, de modéliser (maquette, modèles géométrique et numérique), représentation en conception assistée par ordinateur.
6 ECA+
Je suis capable de produire tout ou partie d’un objet technique sous forme d’une maquette ou d’un prototype de l’objet technique traduisant une solution technologique en suivant un processus, planning, protocoles, procèdes de réalisation (outils, machines). 8 A
Validation attendu de fin
de cycle
Je suis capable, de contrôler, vérifier ses dimensions et son fonctionnement. Je suis capable d’établir une liste les dysfonctionnements.
10 A+
Je suis capable, en équipe,..., de lever les dysfonctionnements de la solution technique réalisée. Je suis capable de justifier si la solution technologique conçue et produite en équipe répond au besoin exprimé et respecte les contraintes identifiées.
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 26
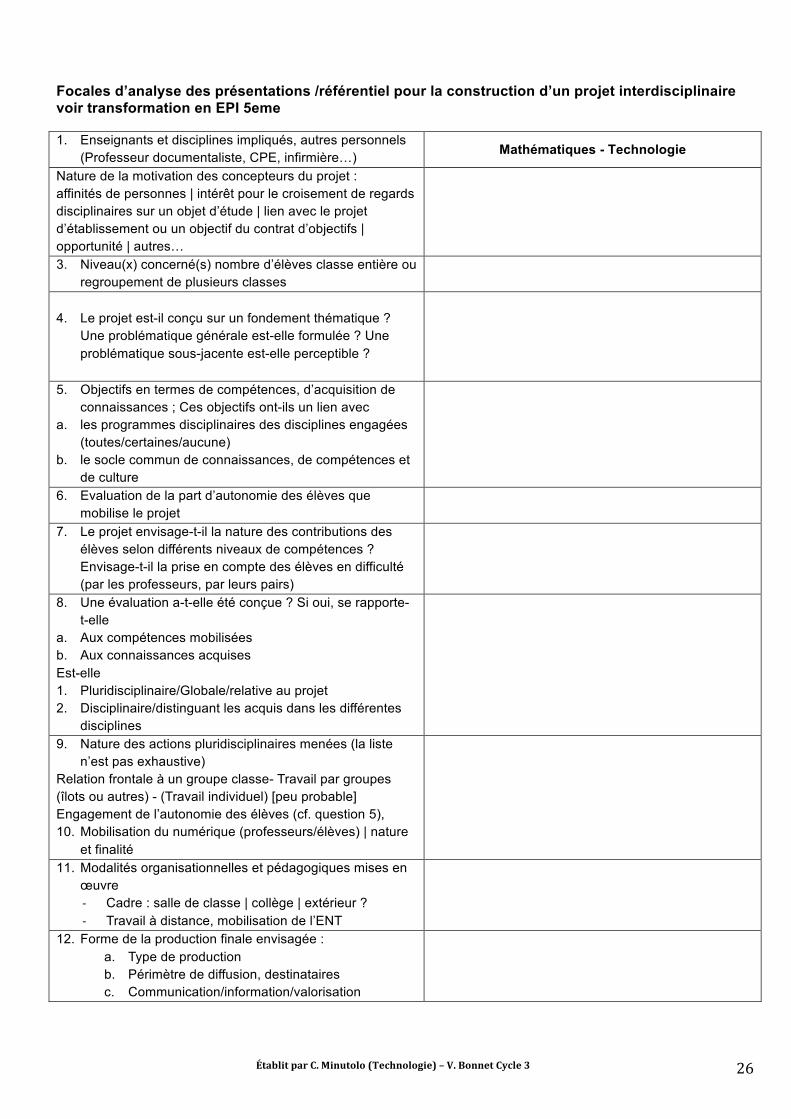
Focales d’analyse des présentations /référentiel pour la construction d’un projet interdisciplinaire voir transformation en EPI 5eme
1. Enseignants et disciplines impliqués, autres personnels
(Professeur documentaliste, CPE, infirmière…) Mathématiques - Technologie
2. Nature de la motivation des concepteurs du projet : affinités de personnes | intérêt pour le croisement de regards disciplinaires sur un objet d’étude | lien avec le projet d’établissement ou un objectif du contrat d’objectifs | opportunité | autres…
3. Niveau(x) concerné(s) nombre d’élèves classe entière ou regroupement de plusieurs classes
4. Le projet est-il conçu sur un fondement thématique ? Une problématique générale est-elle formulée ? Une problématique sous-jacente est-elle perceptible ?
5. Objectifs en termes de compétences, d’acquisition de connaissances ; Ces objectifs ont-ils un lien avec
a. les programmes disciplinaires des disciplines engagées (toutes/certaines/aucune)
b. le socle commun de connaissances, de compétences et de culture
6. Evaluation de la part d’autonomie des élèves que mobilise le projet
7. Le projet envisage-t-il la nature des contributions des élèves selon différents niveaux de compétences ? Envisage-t-il la prise en compte des élèves en difficulté (par les professeurs, par leurs pairs)
8. Une évaluation a-t-elle été conçue ? Si oui, se rapporte-t-elle
a. Aux compétences mobilisées b. Aux connaissances acquises Est-elle 1. Pluridisciplinaire/Globale/relative au projet 2. Disciplinaire/distinguant les acquis dans les différentes
disciplines
9. Nature des actions pluridisciplinaires menées (la liste n’est pas exhaustive)
a. Relation frontale à un groupe classe- Travail par groupes (îlots ou autres) - (Travail individuel) [peu probable]
b. Engagement de l’autonomie des élèves (cf. question 5), 10. Mobilisation du numérique (professeurs/élèves) | nature
et finalité
a.
11. Modalités organisationnelles et pédagogiques mises en œuvre - Cadre : salle de classe | collège | extérieur ? - Travail à distance, mobilisation de l’ENT
12. Forme de la production finale envisagée : a. Type de production b. Périmètre de diffusion, destinataires c. Communication/information/valorisation
ÉtablitparC.Minutolo(Technologie)–V.BonnetCycle3 27
Ressources pour l'enseignant Webographie https://msl-curiosity.cnes.fr/ (en français) http://www.nasa.gov/mission_pages/msl/index.html ( en anglais) Document officiel Lego : guide de l'utilisateur Lego Mindstorms EV3
Ev3 User Guide (10.1 MiB)
Guide Enseignant (4.6 MiB)
v Ressources pour les élèves :
• Inventaire des pièces pour le kit de base Lego Mindstorms EV3
45544 Kit Base Inventaire (3.8 MiB)
• Tri des pièces dans la boîte du kit de base Lego Mindstorms EV3
45544 Kit Base Tri (4.1 MiB)
• Liste des pièces de la boîte de base Lego Mindstorms EV3, avec noms des pièces.
Liste Des Pieces Base (4.1 )