Td Solution Licence
6
TD 1 : Automatique échantillonnée Exercice 1 : Calculer la réponse d'un premier ordre à un train d'impulsion d'amplitude 1 Solution : • Le premier ordre a pour fonction de transfert H( p) = 1 p + a . o Sa réponse au premier dirac est égale à sa réponse impulsionnelle soit : s( t ) = e - at , o Pour ce premier dirac: à t=0 s(0)=1 et à t=T : s(T ) = e - aT • Quand le second dirac arrive, les conditions initiales ne sont plus nulles o L'équation différentielle du système étant ˙ s + as = e o Avec des CI non nulles : pS( p) - s(0) + aSp) = E ( p) soit ß S( p) = E ( p) + s(0) p + a = E ( p) p + a + s(0) p + a , la réponse temporelle pour un dirac en entrée est : s( t ) = e - at 1 + s(0) { } o En considérant un changement d'axe temporel t=t'+T, la condition initiale s( t ' = 0) = s( t = T ) = e - aT on obtient s( t ') = e - at ' 1 + e - aT { } Exercice 2 : Soit un signal x(t) et son spectre X(f). on échantillonne ce signal (ceci est équivalent à la modulation d’amplitude d’un peigne de Dirac par le signal x(t)). a. Calculer le spectre du peigne de Dirac Pd(t) b. Calculer le spectre du signal échantillonné. Exercice 3 : Calculer en utilisant la table, la transformée en Z d'un système composé d'un premier ordre 1 p + 1 et d'un bloqueur d'ordre 0, 1 - e -Tp p (le bloqueur introduisant un retard). Solution Z 1 - e -Tp p 1 p + 1 Ï Ì Ó ¸ ˝ ˛ = Z 1 p( p + 1) Ï Ì Ó ¸ ˝ ˛ - Z e -Tp p( p + 1) Ï Ì Ó ¸ ˝ ˛ A la fonction 1 p( p + 1) correspond un signal temporel s(t) A la fonction e -Tp p( p + 1) correspond le même signal mais retardé soit s(t-T)
-
Upload
hajri-mohamed -
Category
Documents
-
view
54 -
download
1
Transcript of Td Solution Licence

TD 1 : Automatique échantillonnée
Exercice 1 : Calculer la réponse d'un premier ordre à un train d'impulsion d'amplitude 1
Solution :
• Le premier ordre a pour fonction de transfert
†
H(p) =1
p + a.
o Sa réponse au premier dirac est égale à sa réponse impulsionnelle soit :
†
s(t) = e-at ,
o Pour ce premier dirac: à t=0 s(0)=1 et à t=T :
†
s(T) = e-aT
• Quand le second dirac arrive, les conditions initiales ne sont plus nulles
o L'équation différentielle du système étant
†
˙ s + as = e
o Avec des CI non nulles :
†
pS(p) - s(0) + aSp) = E(p)soit
ß
†
S(p) =E(p) + s(0)
p + a=
E(p)p + a
+s(0)p + a
, la réponse temporelle pour un
dirac en entrée est :
†
s(t) = e-at 1+ s(0){ }
o En considérant un changement d'axe temporel t=t'+T, la condition initiale
†
s(t'= 0) = s(t = T) = e-aT on obtient
†
s(t') = e-at ' 1+ e-aT{ }
Exercice 2 : Soit un signal x(t) et son spectre X(f). on échantillonne ce signal (ceci est
équivalent à la modulation d’amplitude d’un peigne de Dirac par le signal x(t)).
a. Calculer le spectre du peigne de Dirac Pd(t)
b. Calculer le spectre du signal échantillonné.
Exercice 3 : Calculer en utilisant la table, la transformée en Z d'un système composé d'un
premier ordre
†
1p +1
et d'un bloqueur d'ordre 0,
†
1- e-Tp
p (le bloqueur introduisant un retard).
Solution
†
Z 1- e-Tp
p1
p +1Ï Ì Ó
¸ ˝ ˛
= Z 1p(p +1)
Ï Ì Ó
¸ ˝ ˛
- Z e-Tp
p(p +1)Ï Ì Ó
¸ ˝ ˛
A la fonction
†
1p(p +1)
correspond un signal temporel s(t)
A la fonction
†
e-Tp
p(p +1)correspond le même signal mais retardé soit s(t-T)

A s(t) correspond sa transformée en Z : S(z) et donc théorème du retard à s(t-T)
correspondra
†
z-1S(z). Le résultat final étant la somme des 2 transformées en z: soit
†
S(z) 1- z-1[ ].
A la fonction
†
1p(p +1)
=1p
-1
p +1 correspond le signal
†
U(t) 1- e- t{ }
La transformée en z de ce signal est :
†
zz -1
-z
z - e-T
Soit
†
z -1z
Ê
Ë Á
ˆ
¯ ˜
zz -1
-z
z - e-T
Ï Ì Ó
¸ ˝ ˛
= 1-z -1
z - e-T
Ï Ì Ó
¸ ˝ ˛
=z - e-T - z +1
z - e-T =1- e-T
z - e-T
Exercice 4 : Donner la réponse du système précédent à un échelon.
L'entrée échelon est
†
E(z) =z
z -1 la sortie :
†
S(z) =1- e-T
z - e-Tz
z -1È
Î Í ˘
˚ ˙ =
†
1- e-T{ }zz - e-T[ ] z -1[ ]
Décomposition en éléments simples de
†
S(z)z
=1- e-T{ }
z - e-T[ ] z -1[ ]=
1z -1
-1
z - e-T
È
Î Í ˘
˚ ˙
Soit
†
S(z) =z
z -1-
zz - e-T
È
Î Í ˘
˚ ˙ fi sn =1- e-nT
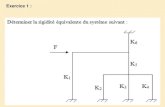
Exercice 5 Trouver l'équation récurrente du système suivant:
†
H(Z) =Z - 0,3
Z - 0,1( ) Z - 0,2( )Z
________________________________________________________
TD 2 automatique échantillonnée
Exercice 1:
Trouver la valeur du nième échantillon de la suite échantillonnée dont la somme s'écrit:
†
F(Z) =1
1-1,2Z-1 + 0,2Z-2
en utilisant les deux méthodes suivantes:
1. Décomposition en éléments simples de
†
F(Z)Z
2. Divisions successives.
Exercice 2:

Trouver la séquence de pondération du système dont la fonction de transfert échantillonnée
est :
†
G(Z) =5Z 2 + 2Z +1Z 2 + 3Z + 2
(par divisions successives)
Exercice 3:
Trouver la fonction de transfert échantillonnée des systèmes linéaires échantillonnés
représentés par les équations aux différences suivantes
1.
†
S kT[ ] - 3S (k -1)T[ ] + 2S (k - 2)T[ ] = 2e (k - 4)T[ ] - e (k - 2)[ ]2.
†
Sn - 0,5Sn-1 + 0,5Sn-2 = 8en - 6en-1 + en-2
_______________________________________________________________________
TD 3 Fonction de transfert échantillonnée
Détermination de la fonction de transfert échantillonné de quelques systèmes
Rappels :
†
Z Bo(p)H(p){ } = (1- z-1)Z H(p)p
Ï Ì Ó
¸ ˝ ˛
Application
1)
†
H(p) =K
(p2 + 3p + 2)
2)
†
H(p) =K
(p2 + p)
3)
†
H(p) =(p +1)
(p2 + p +1)
Solution
1) Les pôles de
†
H(p)p
sont 0, –1 et –2 soient 3 éléments simples p, (p+1) et (p+2)
†
H(p)p
=K
p(p2 + 3p + 2)= K a
p +1+
bp + 2
+cp
Ï Ì Ó
¸ ˝ ˛
On identifie les coefficients c=1/2, b=1/2 et a = -1

†
H(p)p
= K -1
p +1+
1/2p + 2
+1/2
pÏ Ì Ó
¸ ˝ ˛
=
On détermine la transformée de chaque élément dans la table des transformées
†
Z H(p)p
Ï Ì Ó
¸ ˝ ˛
= K -z
z - e-T +0,5z
z - e-2T +0,5zz -1
Ï Ì Ó
¸ ˝ ˛
puis on effectue le calcul final:
†
z -1z
È
Î Í ˘
˚ ˙ ZH(p)
pÏ Ì Ó
¸ ˝ ˛
= K z -1z
-z
z - e-T +0,5z
z - e-2T +0,5zz -1
Ï Ì Ó
¸ ˝ ˛
Soit
†
K -z -1
z - e-T +0,5(z -1)z - e-2T + 0,5
Ï Ì Ó
¸ ˝ ˛
que l'on réduit au même dénominateur
†
K -(z -1)(z - e-2T ) + 0,5(z -1)(z - e-T ) + 0,5(z - e-T )(z - e-2T )z - e-T( ) z - e-2T( )
Ï Ì Ô
Ó Ô
¸ ˝ Ô
˛ Ô
Soit
†
K -z2 + ze-2T + z - e-2T + 0,5z2 - 0,5ze-T - 0,5z + 0,5e-T + 0,5z2 - 0,5ze-2T - 0,5ze-T + 0,5e-3T
z - e-T( ) z - e-2T( )Ï Ì Ô
Ó Ô
¸ ˝ Ô
˛ Ô
†
K(b - 2a -1)2
z + z0
z - e-T( ) z - e-2T( )Ï Ì Ô
Ó Ô
¸ ˝ Ô
˛ Ô
avec
†
z0 =ab - 2b + ab - 2a -1
,
†
a = e-T et
†
b = e-2T
______________________________________
TD 4 : Précision d'un système
1. Ecrire e en fonction de e.
2.
†
H(Z) =Z
Z -1( ) Z - a( ) avec K=1
Quelle est l'erreur de position?
Quelle est l'erreur de vitesse?
H(Z)e
K
se

3. Même question avec K≠1
______________________________________
TD 5 : Stabilité
1. Calculer les racines
• Calculer l'équation caractéristique et en déduire les pôles
• Discuter la valeur de k pour que le système soit stable
2.
†
GBF (Z) =0,37z + 0,26
z2 + z 0,37k -1,37( ) + 0,37 + 0,26k( )
• Discuter des valeurs de k pour que le système soit stable
• Utilisation du critère algébrique de Routh
3.
†
z2 + (k - 2)z + (1- k) = 0
• Discuter des valeurs de k pour que le système soit stable
• Utilisation du critère algébrique de Routh
H(Z
)
†
H(Z) =k
Z - Z1

TD 6 Transposition correcteur analogique
†
HBO (P) =1
P 2 + 0.2P +11. Calcul de la marge de phase et de la marge de gain.
2. Quel est l'apport de phase pour une marge de phase désirée de 45°
3. Calculer les paramètres un correcteur à avance de phase permettant cette
correction. (faire une étude du correcteur).
4. Calculer le correcteur discrétisé
i. Vérifier si Te=0.1 peut être la période d'échantillonnage
ii. Calculer C(Z) Tustin :
†
2Te
z -1z +1
iii. Écrire l'équation récurrente.