Systèmes asservis : Outils MATLAB -...
20
J.-M. Allenbach Outils MATLAB Systèmes asservis : 0.0137 0.0135 0.0133 0.0132 0.0130 0.0128 0.0127 0.0125 0.0139 0.0233 0.0227 0.0222 0.0217 0.0213 0.0208 0.0204 0.0141 0.0238 0.0476 0.0455 0.0435 0.0417 0.0400 0.0385 0.0143 0.0244 0.0500 0.1429 0.1250 0.1111 0.1000 0.0370 0.0145 0.0250 0.0526 0.1667 1.0000 0.5000 0.0909 0.0357 0.0147 0.0256 0.0556 0.2000 0.2500 0.3333 0.0833 0.0345 0.0149 0.0263 0.0588 0.0625 0.0667 0.0714 0.0769 0.0333 0.0152 0.0270 0.0278 0.0286 0.0294 0.0303 0.0312 0.0323 0.0154 0.0156 0.0159 0.0161 0.0164 0.0167 0.0169 0.0172 N° X Edition 2006 Ecole d’Ingénieurs de Genève Laboratoire d'Automatique
Transcript of Systèmes asservis : Outils MATLAB -...

J.-M. Allenbach
Outils MATLAB
Systèmes asservis :
0.0137 0.0135 0.0133 0.0132 0.0130 0.0128 0.0127 0.0125
0.0139 0.0233 0.0227 0.0222 0.0217 0.0213 0.0208 0.0204
0.0141 0.0238 0.0476 0.0455 0.0435 0.0417 0.0400 0.0385
0.0143 0.0244 0.0500 0.1429 0.1250 0.1111 0.1000 0.0370
0.0145 0.0250 0.0526 0.1667 1.0000 0.5000 0.0909 0.0357
0.0147 0.0256 0.0556 0.2000 0.2500 0.3333 0.0833 0.0345
0.0149 0.0263 0.0588 0.0625 0.0667 0.0714 0.0769 0.0333
0.0152 0.0270 0.0278 0.0286 0.0294 0.0303 0.0312 0.0323
0.0154 0.0156 0.0159 0.0161 0.0164 0.0167 0.0169 0.0172
N° X
Edition 2006
Ecole d’Ingénieurs de Genève
Laboratoire d'Automatique


TABLE DES MATIÈRES
1 INTRODUCTION 1 2 FONCTIONS 1
2.1 Conversions de modèle 2.2 Graphes spéciaux
3 LOGICIELS À ÉDITER 4
3.1 Généralités 3.2 Tracés 3.3 Calcul temporel
4 LOGICIELS INTERACTIFS 6
4.1 Dimensionnement de régulateurs classiques 4.2 Dimensionnement de régulateurs dans l'espace d'état
5 SIMULATIONS 11
5.1 Généralités 5.2 Réglage continu 5.3 Réglage échantillonné
6 OUTILS GRAPHIQUES 13
6.1 Etude de détail 7 REMARQUES FINALES 15
Jean-Marc Allenbach –Ecole d'Ingénieurs de Genève i 2006-09-06

Jean-Marc Allenbach –Ecole d'Ingénieurs de Genève ii 2004-06-24

MATLAB/ReguTool
1 INTRODUCTION On utilise en particulier le toolbox standard Control. Des outils spécifiques de support à l'enseignement des systèmes asservis ont été développés au Laboratoire d'Automatique Electrique de l'Ecole d'Ingénieurs de Genève. Ils sont destinés à faciliter l'initiation des étudiants aux méthodes d'asservissement (essentiellement linéaires). Comme MATLAB, chaque toolbox est équipé d'un contents.m et chaque programme ou fonction a son help. 2 FONCTIONS
2.1 Conversions de modèle On représente souvent les fonctions de transfert continues sous forme factorisée de
Bode, forme non répertoriée en MATLAB. On peut utiliser les fonctions ci-dessous en spécifiant les fonctions de transfert sous forme de chaînes de caractère. [a,b,c,d] = systeta(N,D)
[a,b,c] = systenz(N,D,TE)
[a,b] = systenz(N,D,TE)
[a] = systenz(N,D,TE)
con2disf1(num,den,TE)
Donne les matrices d'état du système spécifié par sa fonction de transfert. N et D sont des chaînes de caractères
Donne la fonction de transfert échantillonnée à travers un échantillonneur bloqueur de la fonc-tion continue sous la forme d'un vecteur des zéros: a, d'un vecteur des pôles: b et du gain: c. N et D sont des chaînes de caractères
Donne la fonction de transfert échantillonnée à travers un échantillonneur bloqueur de la fonction continue par un polynôme numérateur : a et d'un polynôme dénominateur: b.
Donne la fonction de transfert échantillonnée à travers un échantillonneur bloqueur de la fonction continue sous forme d'un quotient de polynômes factorisés.
Fonctionne comme systenz, mais les entrées sont définies comme vecteurs de coefficients des polynômes.
On a aussi défini une nouvelle forme de description d’une fonction de transfert : la « forme de Bode » qui contient 3 paramètres : le gain statique, le vecteur des constantes de temps du numérateur et le vecteur des constantes de temps du dénominateur. Cette forme n’est valable que pour racines réelles seulement. [z,p,k] =bd2zp(K,Tnum,Tden) Convertit la forme de Bode en forme d’Evans : « zpk » [num,den] =bd2tf(K,Tnum,Tden) Convertit la forme de Bode en forme canonique : « tf » [A,B,C,D] =bd2ss(K,Tnum,Tden) Convertit la forme de Bode en forme d’état : « ss » G = bddis(K,Tnum,Tden) Affiche la fonction dans la fenêtre de travail [K,Tnum,Tden] =ss2bd(A,B,C,D) Convertit la forme d’état en forme de Bode [K,Tnum,Tden] =tf2bd(num,den) Convertit la forme canonique en forme de Bode [K,Tnum,Tden] =zp2bd(z,p,k) Convertit la forme d’Evans en forme de Bode
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 1 2004-06-24

MATLAB/ReguTool
Exemple: » %système » a='1';b='(1+s*0.05)*(1+s*0.02)*(1+s*0.004)'; » %échantillonnage » t=2e-3;%[s] » [zéro,pôle,gain]=systenz(a,b,t) zéro = -3.1951e+000 -2.2731e-001 pôle = 6.0653e-001 9.0484e-001 9.6079e-001 gain = 2.8515e-004 2.2 Graphes spéciaux Les fonctions standard bode(NUM,DEN) et freqs(NUM,DEN) affichent une phase
modulo 180° entre ±180°. On est souvent intéressé à ce qui se passe au voisinage de 180° et cette discontinuité est gênante. On préfère parfois le module en absolu plutôt qu'en [dB].
freqs1(NUM,DEN) freqz1(NUM,DEN)
nichols1(NUM,DEN)
Donne la réponse harmonique comme freqs ou bode, mais sans discontinuité de phase et en module absolu voir [1], p67. Donne la réponse harmonique comme freqz ou dbode, mais en module absolu et représentation fréquentielle, voir [1], p68. Donne la réponse harmonique comme nichols, mais en français avec abaque de gain modifié.
Exemple:
» num = 1.0000e-002 2.5000e-001 1.0000e+000 » den = 1.1250e-006 1.3501e-002 2.2516e+001 2.7006e+001 9.5006e+000 1.0000e+000
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 2 2004-06-24

MATLAB/ReguTool
» freqs1(num,den,w)
» freqs(num,den,w)
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 3 2006-09-05

MATLAB/ReguTool
3 LOGICIELS À ÉDITER 3.1 Généralités
Tous ces logiciels s'utilisent selon le même principe: • Le logiciel de base est copié depuis le toolbox Reglage sous un autre nom dans le
répertoire de travail de l'utilisateur. • Les données du système à étudier sont introduites à l'aide de l'éditeur. • Le programme est lancé depuis la fenêtre MATLAB. Ces logiciels peuvent paraître assez rudimentaires, comparés à des fonctions. Ils ont l'avantage de permettre à l'étudiant de voir à l'intérieur du programme comment on utilise un certain nombre de fonctions standard MATLAB. Pour utiliser ses logiciels, l'utilisateur prendra soin de spécifier à MATLAB les chemins vers son répertoire de travail, fonction path. Il aura intérêt à écrire une fonction de lancement.
3.1 Tracés On peut faire tracer la réponse harmonique d'un système dans le plan complexe (Nyquist) ou fréquentiel (Bode) ou encore dans le plan avec la phase en abscisse et le module en ordonnée (Black-Nichols). On peut également faire calculer le lieu des pôles en boucle fermée (Evans) ou root locus. affbla affnyq affbod affevans affnyqz
affbodz
affevanz
Trace la réponse harmonique d'un système con-tinu dans le plan de Black: gain et phase. Y reporte l'abaque de Nichols. Trace la réponse harmonique d'un système con-tinu dans le plan complexe. Trace la réponse harmonique d'un système con-tinu dans le plan fréquentiel: gain et phase. Trace le lieu des pôles en boucle fermée pour un système continu donné en boucle ouverte. Comme affnyq , mais échantillonné.
Comme affbod , mais échantillonné.
Comme affevans , mais échantillonné.
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 4 2006-09-05

MATLAB/ReguTool
Exemple: » affnyq
3.2 Calcul temporel
Le programme asservi permet de spécifier régulateur et système à régler et de tracer la réponse indicielle en boucle fermée.
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 5 2006-09-05

MATLAB/ReguTool
4 LOGICIELS INTERACTIFS 4.1 Dimensionnement de régulateurs classiques
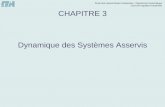
Ce programme permet de dimensionner un régulateur qui reçoit comme entrée l’écart de réglage, en calculant dans le lieu des pôles ou dans le plan harmonique. On y accède en tapant DimReg sur la ligne de commande 4.1.1 But Le programme DimReg.m est conçu pour épauler un ingénieur dans le dimensionnement d’un régulateur pour un système qu’il connaît analytiquement. On suppose que l’opérateur est familier des implications des déplacements des pôles ou des déformations de la réponse harmonique sur le comportement dynamique du système réglé : il sera ainsi capable d’opérer les choix judicieux parmi les propositions du logiciel. On considère la structure présentée à la figure. Le cœur du programme est dans la fonction PoleHarmo.m qui contient les appels aux autres fonctions et gère le déroulement des opérations de calcul et de dialogue avec l'utilisateur.
y GF GR Gd Gd
Gs
ucmw
v
+ + +
–
e
F
Système asservi. 4.1.2 Entrée des données L’opérateur est invité à entrer la fonction de transfert Gs du système à régler, en s ou en z, sous la forme canonique (TransferFunction de MATLAB) ou sous forme factorisée d’Evans (Zeropole). En s, si toutes les racines sont réelles, on peut encore entrer sous forme factorisée de Bode (forme non standard MATLAB, développée pour les besoins : [Gain statique, Constantes de temps du numérateur, Constantes de temps du dénominateur]). En option, il peut encore introduire la partie Gp du système à régler qui est soumise aux perturbations. La partie Gd du système non perturbée est calculée par le logiciel. En l’absence de cette donnée, le logiciel considère que la perturbation se superpose à la sortie du régulateur : Gp = Gs ; Gd = 1. L’utilisateur peut demander de stocker en mémoire les données pour les récupérer ultérieurement. Il doit choisir le nom de mémorisation, par exemple ‘MonSysteme1’, Le programme génère alors un fichier MonSysteme1.mat qui est enregistré dans le répertoire courant.
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 6 2006-09-05

MATLAB/ReguTool
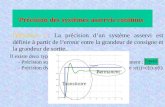
4.1.3 Cahier des charges. Le cahier des charges pour le comportement du système réglé F face à une variation de consigne doit être spécifié par deux paramètres : le dépassement maximal D1max sur la réponse indicielle et le temps de réponse à 5 % trmax. Pour une perturbation, les paramètres sont la déviation maximale E1max causée par la perturbation et le temps de correction tcpmax admissible pour que l’erreur due à la perturbation soit rattrapée à 1 % près. On peut aussi stocker un fichier .mat qui contient les mêmes données qu’à l’étape précédente et est enrichi du cahier des charges. Une sauvegarde est vivement recommandée à ce stade !
A 0
1
D1
tr B
E1
tcp
Gabarits de réponses à une variation de consigne (A) et de perturbation (B). 4.1.4 Regupole
Deux algorithmes sont proposés : 1. Imposition des pôles dominants en boucle fermée selon le cahier des charges, puis calcul
du régulateur par le logiciel selon la condition des angles et celle des modules. http://eig.unige.ch/~allenbach/Documents/SAth84.pdf2. Imposition des zéros du régulateur, puis le logiciel calcule l’intervalle de gain du
régulateur qui permet à tous les pôles en boucle fermée de s’inscrire à l’intérieur du contour d’Evans.
http://eig.unige.ch/~allenbach/Documents/SAth66.pdf Dans les deux cas, l’opérateur choisit les pôles du régulateur, qui doit dans tous les cas être causal. La fonction de transfert GR du régulateur est calculée et présentée sous forme factorisée sur la fenêtre de commande, mais gardée en mémoire sous forme canonique. L’adjonction d’un filtre de consigne GF est proposée à l’utilisateur. Pour un régulateur RST, ce filtre est nécessaire. Par défaut, le logiciel choisit GF = 1. 4.1.5 RegHarmo Le dimensionnement à l’aide de la réponse harmonique en boucle ouverte dans les plans de Bode, Nyquist ou Black est aussi disponible. On utilise les critères : Bode : rapport de pulsation http://eig.unige.ch/~allenbach/Documents/SAth83.pdfNyquist : marge de phase http://eig.unige.ch/~allenbach/Documents/SAth63.pdfBlack : facteur de résonance http://eig.unige.ch/~allenbach/Documents/SAth64.pdf 4.1.6 Système en boucle fermée On peut faire tracer les réponses indicielles pour un saut de consigne ou de perturbation ainsi que le lieu des pôles ou la réponse harmonique, dans tous les cas pour le système asservi.
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 7 2006-09-05

MATLAB/ReguTool
4.1.7 Modifications Si les résultats ne conviennent pas, on peut revenir à un point intermédiaire de la procédure, pour autant qu’on ait pris soin de créer un fichier de sauvegarde. »ReguPole(‘entree’) %Retour à l’entrée du système à régler »ReguPole(‘voulu’) %Retour à l’entrée du cahier des charges »ReguPole(‘calcul’) %Retour au dimensionnement du régulateur »ReguPole(‘filtre’) %Retour au dimensionnement du filtre de consigne »ReguPole(‘gain’) %Retour aux affichages en boucle fermée, éventuellement avec correction du
gain du régulateur.
Le logiciel demande ensuite le nom du fichier de sauvegarde à rechercher dans le répertoire courant, par exemple ‘MonSysteme1’. Les mêmes possibilités sont offertes avec RegHarmo. 4.1.8 Remarque On utilise aussi quelques fonctions générales non standard de MATLAB, qui peuvent être téléchargées depuis le même site que DimenRegul. La version de Addendum qui les contient doit être postérieure à mars 2004.
4.2 Dimensionnement dans l'espace d'état Ce programme permet de dimensionner un régulateur avec contre-réaction d'état en choisis-sant tous les pôles en boucle fermée – sauf un – en fonction du cahier des charges. On y accède en tapant regetat('go') sur la ligne de commande (version 3.0). La version 4.0 ne fonctionne que pour Matlab 7.0 : on tape regetat4 sur la ligne de commande. Les boutons placés sur le bord droit de l'écran (version 3.0) ou sur le bord supérieur (version 4.0) guident l'opérateur dans les diverses étapes: données du système, cahier des charges, choix des pôles... Les boutons ne sont activables que si les opérations précédentes ont été effectuées.
OCM
kv
w
1s
kTR
i
kw
s Td
k sT
S
xRTi
xs
v
yuucm ucm'
+
++
–
––+
+
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 8 2006-09-05

MATLAB/ReguTool
4.2.1 Entrée des données On entre de manière séparée les 4 matrices du processus S, l’organe de commande OCM assimilé à un filtre du premier ordre et enfin le cahier des charges. 4.2.2 Choix des pôles L’utilisateur doit choisir les pôles qu’il veut imposer pour le système en boucle fermée en fonction du comportement dynamique attendu selon les critères du réglage d’état : http://eig.unige.ch/~allenbach/Documents/SAth104.pdfIl doit aussi choisir quel pôle compenser par un zéro du régulateur 4.2.3 Sauvetage On peut mémoriser ou récupérer une session dans la version 3.0 à l'aide du bouton «load/save file» donnant accès à un fichier *.mat. Dans la version 4.0, ce fonction se fait depuis la barre des tâches « Fichier (ouvrir/enregistrer) » 4.2.4 Vérification On peut calculer une réponse indicielle soit sur l’entrée de consigne soit sur la perturbation. A titre d'exemple, l'image obtenue après action sur le bouton «Réponse indicielle»: Avec la version 3.0
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 9 2006-09-05

MATLAB/ReguTool
Avec la version 4.0
Avec la version 4.0 tout comme avec la version 3.0, les boutons ne sont actifs que si les opérations précédentes ont été accomplies avec succès et que tous les prérequis sont disponibles.
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 10 2006-09-05

MATLAB/ReguTool
5 SIMULATIONS 5.1Généralités Ces logiciels de simulation ont été édité sous simulink qui fonctionne conjointement à MATLAB. Si on tape leur nom sous le prompt de MATLAB, ils sont automatiquement lancés, sans nécessité d'ouvrir d'abord simulink . L'utilisateur ira modifier dans chaque bloc les valeurs nu-mériques pour les adapter au problème qu'il veut traiter. S'il veut conserver sa simulation, celle-ci devra être enregistrée sous un autre nom, dans le répertoire de travail de l'utilisateur. On prendra garde au choix de la méthode de résolution numérique des équations différen-tielles: certaines simulations avec non-linéarités peuvent poser des problèmes numériques avec une méthode inadaptée; tel est par exemple le cas de simafpos.mdl résolu avec Dor-mand-Prince en un point où vitesse et accélération sont simultanément très voisines de zéro.
5.2 Réglage continu regana
regmes
simreget sima_fin
sima_gro
simafpos
simafvit
simalpos testnyq
windup
Permet de simuler un système asservi composé d'un régulateur et d'un système à régler, le cas échéant décomposé en sous-systèmes.
Permet de simuler un système "boîte noire" (par modèle d'état), d'en mesurer la réponse indicielle, de dimensionner le régulateur par exemple selon Ziegler-Nichols puis de vérifier le comportement dynamique du système asservi.
Permet de simuler un système asservi par ses variables d'état, avec limitation sur la sortie du régulateur, avec dispositif correcteur "anti-windup". (toolbox Regetat!) Permet de simuler en boucle ouverte le banc Système d'Initiation aux Méthodes d'Asservissement du Laboratoire d'Automatique.
Permet de simuler en boucle ouverte, de manière très simplifiée, le banc SIMA du Laboratoire d'Automatique.
Réglage de position du banc SIMA.
Réglage de vitesse du banc SIMA.
Réglage de position du banc SIMA (modèle linéarisé). Mise en évidence de la limite de stabilité (expérience de Nyquist)
Mise en évidence de l'effet de surcharge de la composante intégrale d'un régulateur, avec dispositif correcteur "anti-windup".
5.3 Réglage échantillonné regech Permet de simuler le réglage d'un système continu par un régulateur
discret.
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 11 2006-09-05

MATLAB/ReguTool
Exemple: » regana
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 12 2006-09-05

MATLAB/ReguTool
6 OUTILS GRAPHIQUES 6.1 Etude de détail
La fonction graph_0 affiche dans la barre de commande de la figure courante un menu déroulant GRAPHIQUE permettant diverses manipulations sur le graphique: zoom, affichage de points d'une courbe... Cette fonction fait appel à des fonctions standard Matlab et à trois autres fonctions spécifiques: graph_1, attmov et gimpu . Exemple: » affnyq » graph_0
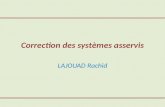
On peut encore rechercher un paramètre sur une courbe : soit la pulsation ω pour Nyquist ou Black, soit le facteur d’Evans k0 pour le lieu de pôles. On crée un tableau qui juxtapose la courbe avec le paramètre correspondant, puis on peut l’afficher sur la fenêtre de travail ou mieux le visualiser avec l’array editor. » TabloNyquist=[RE,IM,W]; » TabloBlack=[module,phase,w]; » TablodEvans=[r,k’];
Pour des versions antérieures à 5.2, pas de transposition « ‘ » du vecteur des facteurs d’Evans car c’est déjà une colonne. Il suffit de rechercher sur le tableau la valeur la plus proche des coordonnées du point recherché sur la courbe, et lire sur la même ligne, dans la colonne de droite, la valeur du paramètre correspondant. On peut ensuite ajouter la valeur du paramètre sur la figure : » gtext(['omega = ',num2str(TabloNyquist(278,3))]);
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 13 2006-09-05

MATLAB/ReguTool
- - - - - - 0 -
-
-
-
-
-
-
-
-
-
0 Diagramme de Nyquist : Go(s)= -----------------------------------------------------------------------
1.23s*(1+0.1*s)*(1+0.02*s)
( 0.24223 , -120.0027° )
omega = 4.6273
( -0.12037 , -0.20906 )
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 14 2004-06-25

MATLAB/ReguTool
7 REMARQUES FINALES Les logiciels décrits ci-dessus sont disponibles sous forme de Toolboxes sous W:\Regutool\... à l’EIG ou sur le site internet sous forme téléchargeable. http://eig.unige.ch/~allenbach/matlab.htm L'utilisateur devra spécifier – par exemple en créant un programme de lancement – les chemins d'accès de MATLAB aux répertoires concernés.
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 15 2004-06-25

MATLAB/ReguTool
Jean-Marc Allenbach – Ecole d'Ingénieurs de Genève 16 2004-06-25