statique Des Systemes De Solides`marc.derumaux.free.fr/sup/cours/poly_statique.pdf · Statique des...
40
Statique des syst` emes de solides Statique des syst` emes de solides Table des mati` eres 1 Deux exemples d’illustration 2 1.1 Syst` eme de freinage du TGV 1 ............................ 2 1.2 Micro-compresseur .................................. 4 2 R´ esolution comment´ ee de l’exemple du compresseur 6 2.1 Mod´ elisation du syst` eme ............................... 7 2.2 Mod´ elisation des efforts (actions m´ ecaniques) ................... 8 2.3 ´ Etude de l’´ equilibre de la bielle ........................... 8 2.4 ´ Etude de l’´ equilibre de l’arbre ............................ 9 2.4.1 Action de 2/1 ................................. 9 2.4.2 Action de 0/1 ................................. 10 2.4.3 Action du moteur sur 1 ........................... 11 2.4.4 ´ Equations du PFS ............................... 11 2.5 ´ Etude de l’´ equilibre du piston 3 ........................... 11 2.6 R´ esolution du probl` eme ............................... 12 2.7 Retour sur les efforts dans les roulements ..................... 12 3 Action m´ ecanique et Principe Fondamental de la Statique (PFS) 14 3.1 Le torseur d’action m´ ecanique (torseur statique) ................. 14 3.2 ´ Enonc´ e du Principe Fondamental de la Statique (PFS) .............. 15 3.3 Th´ eor` eme des actions r´ eciproques ......................... 15 3.4 M´ ethodes de r´ esolution ............................... 16 3.4.1 M´ ethode syst´ ematique (mais longue) ................... 16 3.4.2 M´ ethode intelligente ............................. 17 3.4.3 M´ ethode intuitive ............................... 17 3.4.4 Exemple : Syst` eme de freinage du TGV .................. 18 3.5 Mod´ elisation plane en statique ........................... 18 4 Mod´ elisation des actions m´ ecaniques 19 4.1 Action m´ ecanique volumique ............................ 19 4.2 Action m´ ecanique surfacique ............................ 20 4.3 Mod´ elisation d’un contact ponctuel entre deux solides – Lois de Coulomb .. 20 4.3.1 Contact sans frottement ........................... 22 4.3.2 Contact avec frottement : Mod` ele de Coulomb .............. 22 4.3.3 Contact ponctuelle avec r´ esistance au roulement ou au pivotement . . 24 4.3.4 Exemple : Syst` eme de freinage du TGV .................. 25 4.4 Contact surfacique entre deux solides ....................... 26 4.4.1 Contact surfacique sans frottement ..................... 26 4.4.2 Contact surfacique avec frottement : mod` ele de Coulomb ........ 26 4.4.3 Le probl` eme de la r´ epartition de pression normale ............ 26 4.4.4 Exemple : Syst` eme de freinage du TGV .................. 26 1. Support du sujet du concours Centrale-Sup´ elec 2006 fili` ere PSI. Marc D´ erumaux – LLG page 1
Transcript of statique Des Systemes De Solides`marc.derumaux.free.fr/sup/cours/poly_statique.pdf · Statique des...

Statique des systemes de solides
Statique des systemes de solides
Table des matieres
1 Deux exemples d’illustration 2
1.1 Systeme de freinage du TGV 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Micro-compresseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Resolution commentee de l’exemple du compresseur 6
2.1 Modelisation du systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Modelisation des efforts (actions mecaniques) . . . . . . . . . . . . . . . . . . . 82.3 Etude de l’equilibre de la bielle . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4 Etude de l’equilibre de l’arbre . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4.1 Action de 2/1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4.2 Action de 0/1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.3 Action du moteur sur 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.4 Equations du PFS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5 Etude de l’equilibre du piston 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.6 Resolution du probleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.7 Retour sur les efforts dans les roulements . . . . . . . . . . . . . . . . . . . . . 12
3 Action mecanique et Principe Fondamental de la Statique (PFS) 14
3.1 Le torseur d’action mecanique (torseur statique) . . . . . . . . . . . . . . . . . 14
3.2 Enonce du Principe Fondamental de la Statique (PFS) . . . . . . . . . . . . . . 153.3 Theoreme des actions reciproques . . . . . . . . . . . . . . . . . . . . . . . . . 153.4 Methodes de resolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4.1 Methode systematique (mais longue) . . . . . . . . . . . . . . . . . . . 16
3.4.2 Methode intelligente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.4.3 Methode intuitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.4.4 Exemple : Systeme de freinage du TGV . . . . . . . . . . . . . . . . . . 18
3.5 Modelisation plane en statique . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Modelisation des actions mecaniques 19
4.1 Action mecanique volumique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2 Action mecanique surfacique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.3 Modelisation d’un contact ponctuel entre deux solides – Lois de Coulomb . . 20
4.3.1 Contact sans frottement . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.3.2 Contact avec frottement : Modele de Coulomb . . . . . . . . . . . . . . 22
4.3.3 Contact ponctuelle avec resistance au roulement ou au pivotement . . 244.3.4 Exemple : Systeme de freinage du TGV . . . . . . . . . . . . . . . . . . 25
4.4 Contact surfacique entre deux solides . . . . . . . . . . . . . . . . . . . . . . . 264.4.1 Contact surfacique sans frottement . . . . . . . . . . . . . . . . . . . . . 26
4.4.2 Contact surfacique avec frottement : modele de Coulomb . . . . . . . . 264.4.3 Le probleme de la repartition de pression normale . . . . . . . . . . . . 264.4.4 Exemple : Systeme de freinage du TGV . . . . . . . . . . . . . . . . . . 26
1. Support du sujet du concours Centrale-Supelec 2006 filiere PSI.
Marc Derumaux – LLG page 1
Statique des systemes de solides
5 Modelisation des liaisons reelles 275.1 Illustration : Guindeau Lewmar . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.1.1 Fonction du guindeau . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.1.2 Fonctionnement du guindeau . . . . . . . . . . . . . . . . . . . . . . . . 285.1.3 Problematique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.2 Influence de la taille relative de la zone de contact . . . . . . . . . . . . . . . . 295.2.1 Cas d’ecole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.2.2 Application au contact roue-vis . . . . . . . . . . . . . . . . . . . . . . . 315.2.3 Application au guidage par surfaces coniques . . . . . . . . . . . . . . 32
5.3 Influence du jeu sur les actions transmissibles . . . . . . . . . . . . . . . . . . . 325.3.1 Cas d’ecole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.3.2 Application a l’arbre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.4 Influence du frottement dans les liaisons . . . . . . . . . . . . . . . . . . . . . . 355.4.1 Quand tenir compte du frottement . . . . . . . . . . . . . . . . . . . . . 355.4.2 Application au barbotin . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.5 Liaisons par elements d’interface – Roulements . . . . . . . . . . . . . . . . . . 365.5.1 Les roulements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.5.2 Application au guindeau . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6 Statique graphique 396.1 Cas d’un solides soumis a 2 forces . . . . . . . . . . . . . . . . . . . . . . . . . 396.2 Cas d’un solide soumis a 3 forces non paralleles . . . . . . . . . . . . . . . . . 40
1 Deux exemples d’illustration
1.1 Systeme de freinage du TGV 2
Le TVG est l’une des technologies de pointe sur laquelle la France est leader mondial. Ilrepresente une vitrine du savoir-faire francais et devrait pouvoir conquerir les marches dutrain grande vitesse dans le monde.
Le 3 avril 2007, le TGV battait pour la troisieme fois son propre record mondial a 574.8 km/h.Au-dela de ce record, la technologie francaise permet des trajets commerciaux a plus de320 km/h avec un niveau de confort optimal. Plusieurs verrous technologiques ont du etreleves pour atteindre ces performances. L’innovation consistant a construire une rame dontles bogies sont places a l’interface entre les voitures est un element cle des performances duTGV.
Le freinage est lui aussi un element cle, puisque l’energie cinetique a dissiper evolue avecle carre de la vitesse. Le TGV est actuellement limite a 320 km/h par son systeme de freinage.Celui-ci est constitue d’un freinage rheostatique (les moteurs sont utilises en generatrice etdebitent dans des resistances placees sur le toit) et d’un freinage par frottement (freins adisques sur les voitures et a semelles sur les motrices). Pour passer a 350 km/h en vitessecommerciale, Alstom prevoit d’ajouter un frein a courant de Foucault, dissipant l’energiedirectement dans les rails.
Nous nous interessons dans cette partie aux freins a disques. Le TGV Duplex (377 passa-gers) comporte 10 voitures (dont deux motrices en tete et en queue, contenant l’equipement
2. Support du sujet du concours Centrale-Supelec 2006 filiere PSI.
page 2
Statique des systemes de solides
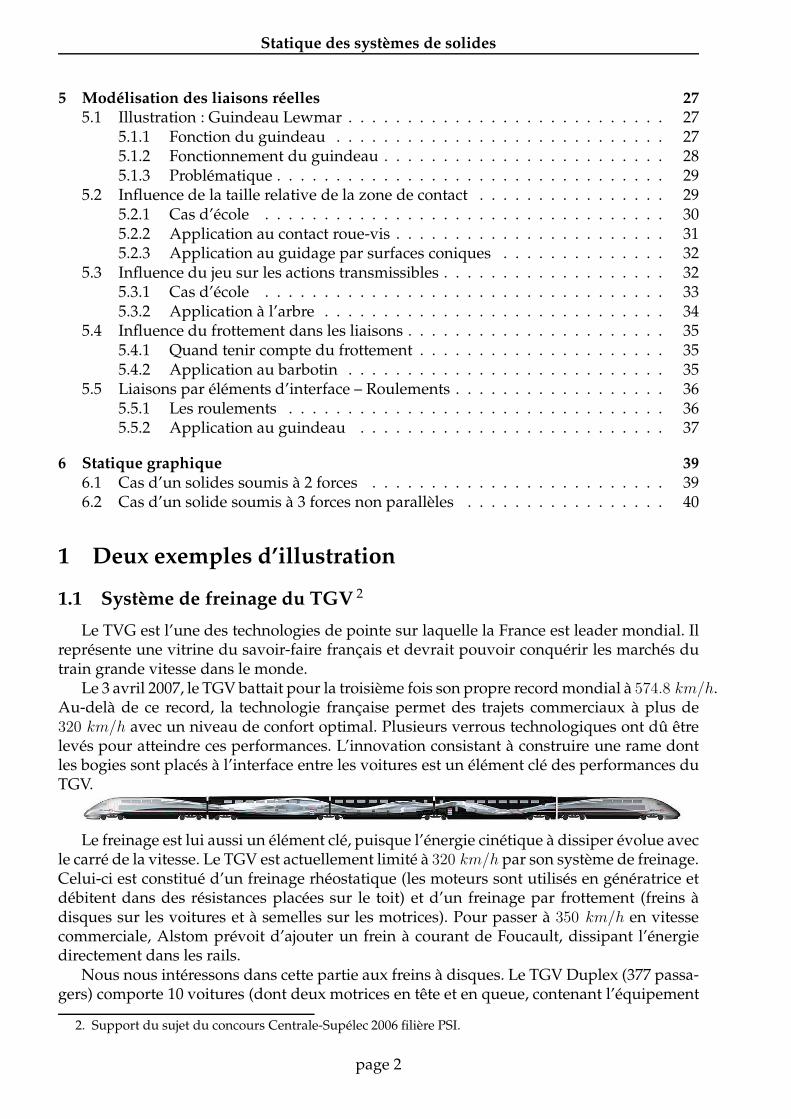
FIGURE 1 – Rame du TGV modifiee pour le record de vitesse.
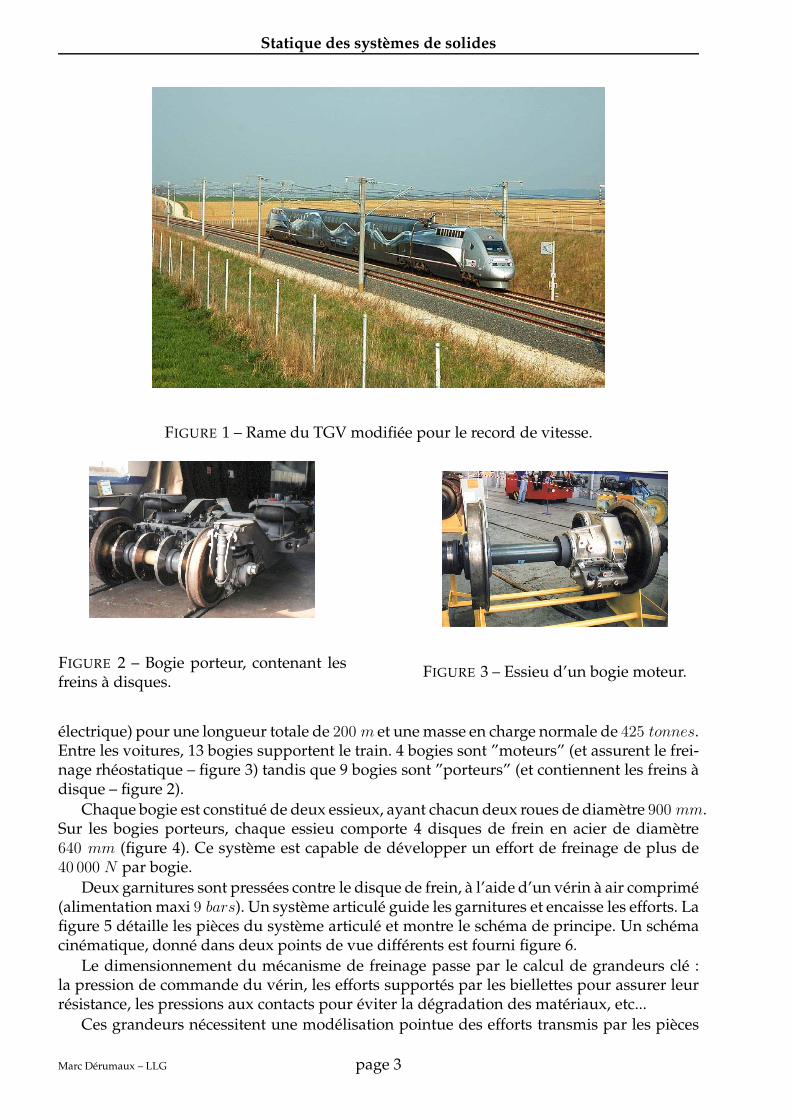
FIGURE 2 – Bogie porteur, contenant lesfreins a disques.
FIGURE 3 – Essieu d’un bogie moteur.
electrique) pour une longueur totale de 200 m et une masse en charge normale de 425 tonnes.Entre les voitures, 13 bogies supportent le train. 4 bogies sont ”moteurs” (et assurent le frei-nage rheostatique – figure 3) tandis que 9 bogies sont ”porteurs” (et contiennent les freins adisque – figure 2).
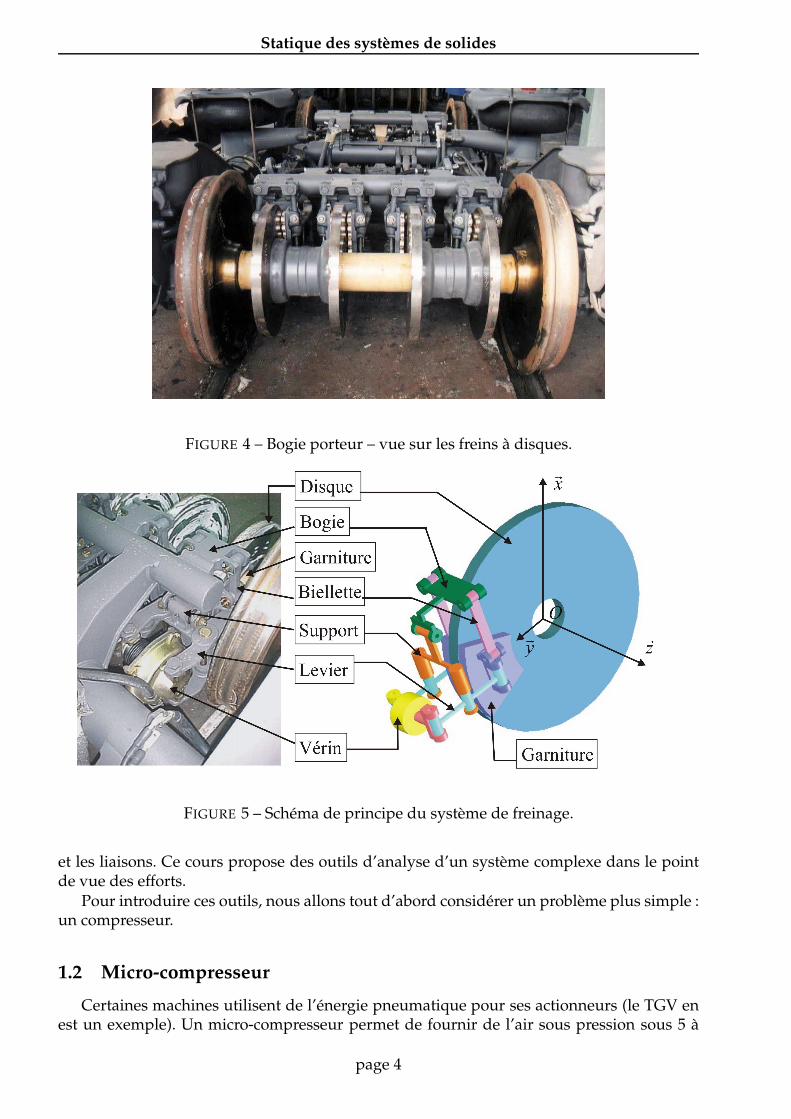
Chaque bogie est constitue de deux essieux, ayant chacun deux roues de diametre 900 mm.Sur les bogies porteurs, chaque essieu comporte 4 disques de frein en acier de diametre640 mm (figure 4). Ce systeme est capable de developper un effort de freinage de plus de40 000 N par bogie.
Deux garnitures sont pressees contre le disque de frein, a l’aide d’un verin a air comprime(alimentation maxi 9 bars). Un systeme articule guide les garnitures et encaisse les efforts. Lafigure 5 detaille les pieces du systeme articule et montre le schema de principe. Un schemacinematique, donne dans deux points de vue differents est fourni figure 6.
Le dimensionnement du mecanisme de freinage passe par le calcul de grandeurs cle :la pression de commande du verin, les efforts supportes par les biellettes pour assurer leurresistance, les pressions aux contacts pour eviter la degradation des materiaux, etc...
Ces grandeurs necessitent une modelisation pointue des efforts transmis par les pieces
Marc Derumaux – LLG page 3
Statique des systemes de solides
FIGURE 4 – Bogie porteur – vue sur les freins a disques.
FIGURE 5 – Schema de principe du systeme de freinage.
et les liaisons. Ce cours propose des outils d’analyse d’un systeme complexe dans le pointde vue des efforts.
Pour introduire ces outils, nous allons tout d’abord considerer un probleme plus simple :un compresseur.
1.2 Micro-compresseur
Certaines machines utilisent de l’energie pneumatique pour ses actionneurs (le TGV enest un exemple). Un micro-compresseur permet de fournir de l’air sous pression sous 5 a
page 4

Statique des systemes de solides
FIGURE 6 – Schema cinematique du systeme de freinage.
8 bar. Il fonctionne generalement de facon intermitante : l’air sous pression est stocke dansune bonbonne. Le compresseur est lui meme entraine par un moteur electrique.
FIGURE 7 – Vue exterieure du compres-seur.
FIGURE 8 – Vue en ecorche de l’interieurdu compresseur.
Marc Derumaux – LLG page 5
Statique des systemes de solides
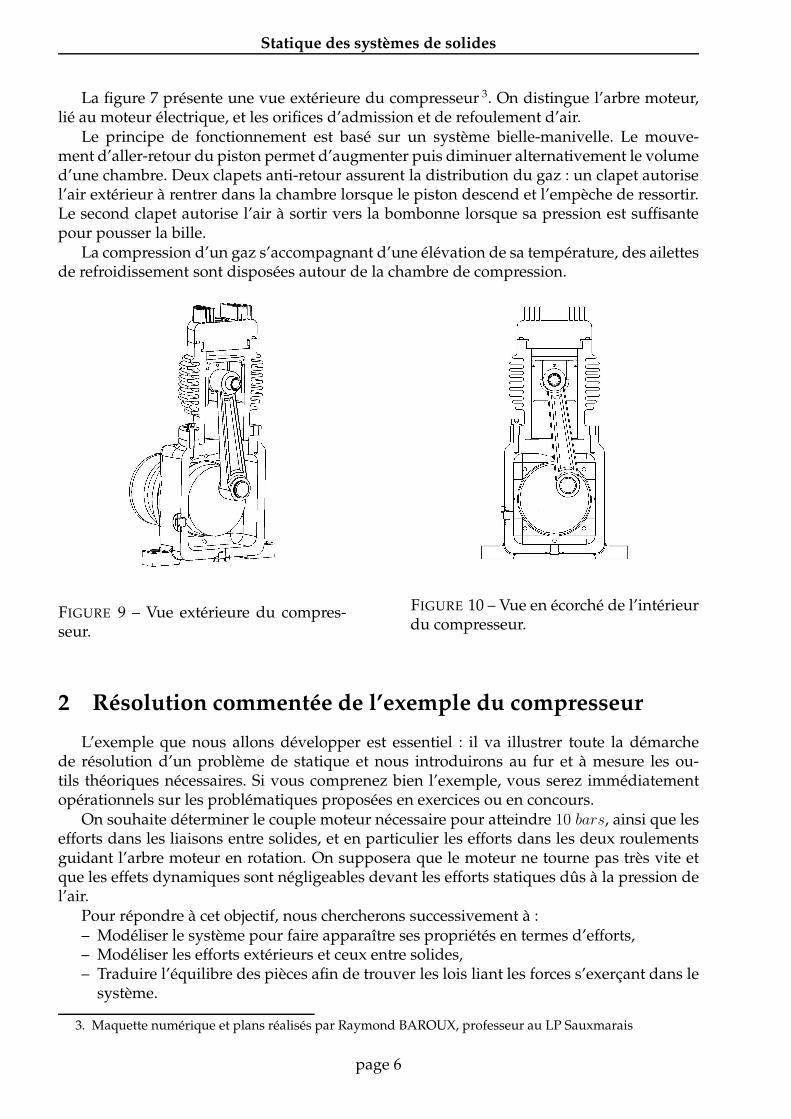
La figure 7 presente une vue exterieure du compresseur 3. On distingue l’arbre moteur,lie au moteur electrique, et les orifices d’admission et de refoulement d’air.
Le principe de fonctionnement est base sur un systeme bielle-manivelle. Le mouve-ment d’aller-retour du piston permet d’augmenter puis diminuer alternativement le volumed’une chambre. Deux clapets anti-retour assurent la distribution du gaz : un clapet autorisel’air exterieur a rentrer dans la chambre lorsque le piston descend et l’empeche de ressortir.Le second clapet autorise l’air a sortir vers la bombonne lorsque sa pression est suffisantepour pousser la bille.
La compression d’un gaz s’accompagnant d’une elevation de sa temperature, des ailettesde refroidissement sont disposees autour de la chambre de compression.
FIGURE 9 – Vue exterieure du compres-seur.
FIGURE 10 – Vue en ecorche de l’interieurdu compresseur.
2 Resolution commentee de l’exemple du compresseur
L’exemple que nous allons developper est essentiel : il va illustrer toute la demarchede resolution d’un probleme de statique et nous introduirons au fur et a mesure les ou-tils theoriques necessaires. Si vous comprenez bien l’exemple, vous serez immediatementoperationnels sur les problematiques proposees en exercices ou en concours.
On souhaite determiner le couple moteur necessaire pour atteindre 10 bars, ainsi que lesefforts dans les liaisons entre solides, et en particulier les efforts dans les deux roulementsguidant l’arbre moteur en rotation. On supposera que le moteur ne tourne pas tres vite etque les effets dynamiques sont negligeables devant les efforts statiques dus a la pression del’air.
Pour repondre a cet objectif, nous chercherons successivement a :– Modeliser le systeme pour faire apparaıtre ses proprietes en termes d’efforts,– Modeliser les efforts exterieurs et ceux entre solides,– Traduire l’equilibre des pieces afin de trouver les lois liant les forces s’exercant dans le
systeme.
3. Maquette numerique et plans realises par Raymond BAROUX, professeur au LP Sauxmarais
page 6

Statique des systemes de solides
2.1 Modelisation du systeme
Le mecanisme est constitue d’un assemblage de pieces rigides (la geometrie des piecespeut etre consideree comme invariante). On recherche les efforts s’exercant entre les pieces.Il est donc logique de se rapprocher des modeles deja utilises en cinematique, qui presententle mecanisme comme un assemblage de solides lies par des liaisons.
FIGURE 11 – Graphe de structure du compresseur.
Nous utiliserons donc le graphe de structure et le schema cinematique pour modeliserle systeme. Attention toutefois car le point de vue adopte est l’etude des efforts : le choix desliaisons peut etre different de celui envisage pour l’etude des mouvements.
On propose le graphe de structure de la figure 11 et le schema cinematique (parametre)figure 12.
FIGURE 12 – Schemas cinematiques 3D et 2D du compresseur.
La liaison du piston avec le bati est realisee par un contact cylindre-cylindre et se modelisenaturellement par une liaison pivot glissant.
Les deux liaisons de part et d’autre de la bielle sont realisees par des contact cylindre-cylindre relativement courts par rapport au diametre, ce qui nous conduit a les modeliserpar des liaisons rotules. Nous reviendrons plus tard sur les raisons de ce choix (paragraphe5.3 page 32).
Pour le guidage de l’arbre par rapport au bati, nous ne sommes pas rentres dans le detaildes deux roulements et nous avons modelise la liaison globale comme une pivot, bloquanttous les mouvements hormis la rotations suivant ~z.
Ces choix de liaisons vont nous guider pour traduire les efforts transmis par ces liaisons.
Marc Derumaux – LLG page 7

Statique des systemes de solides
2.2 Modelisation des efforts (actions mecaniques)
Effort exterieur de l’air sur le piston 3 : L’air exerce sur la surface S du piston une pressionp uniforme, qui peut etre representee par une force appliquee au centre C de la surface :~Fair/3 = −p.S.~y0.
Effort de la bielle 2 sur le piston 3 : La liaison rotule ne bloquant aucune rotation, elle ne
peut transmettre qu’une force appliquee en son centre : ~F2/3.
Effort de l’arbre 1 sur la bielle 2 : De meme, la liaison rotule transmet une force : ~F1/2.
Effort exterieur du moteur sur l’arbre 1 : L’action du moteur est un couple (ou un moment)car elle tend a faire tourner l’arbre suivant l’axe ~z0. Elle se modelise sous la forme d’unvecteur colineaire a ~z0 : ~MM,mot/1 = Cm.~z0 (Cm s’exprime en N.m).
Action mecanique du bati 0 sur l’arbre 1 : La liaison pivot entre le bati 0 et l’arbre 1 bloquebeaucoup de mouvements : les trois translations et deux rotations. Lorsqu’un mouvementest bloque, cela sous-entend que la liaison est susceptible de transmettre une action quiempeche le mouvement.
La liaison est donc capable de transmettre une force ~F0/1 suivant les trois directions pour
bloquer les translations, et un moments ~MD,0/1 suivant les deux directions ~x0 et ~y0 pourbloquer les rotations :
~F0/1 = X01.~x0 + Y01.~y0 + Z01.~z0 ~MD,0/1 = L01.~x0 +M01.~y0
Action mecanique du bati 0 sur le piston 3 : De meme, la liaison pivot-glissant du bati 0
sur le piston 3 est capable de transmettre une force ~F0/3 suivant les deux directions de trans-
lation bloquees ~x0 et ~z0, ainsi qu’un moment ~MC,0/3 suivant les deux directions de rotationbloquees ~x0 et ~z0 :
~F0/3 = X03.~x0 + Z03.~z0 ~MD,0/3 = L03.~x0 +N03.~z0
Pour etre le plus clair possible sur la terminologie, on reserve le terme de Force lorsqu’ils’agit d’une force appliquee en un point, le terme de Couple pour une action qui tend uni-quement a faire tourner (pas de force associee) et le terme d’Action Mecanique dans le casgeneral, lorsqu’il y a association d’une force et d’un moment. Le terme effort est utilise defacon plus vague pour designer soit une force, soit une action mecanique.
2.3 Etude de l’equilibre de la bielle
Chacun connait le principe fondamental de la dynamique applique au point materiel :∑ ~Fext = m.~a. Si le mouvement est lent ou si il n’y a pas mouvement (hypothese de systemequasi-statique ou statique), l’acceleration est nulle et on parle alors de principe fondamental
de la statique :∑ ~Fext = ~0.
Applique a la bielle 2, soumise a deux forces exterieures, le PFS s’ecrit :
∑~Fext/2 = ~0 =⇒ ~F1/2 + ~F3/2 = ~0
page 8

Statique des systemes de solides
FIGURE 13 – La somme des forces egalea 0 n’est pas suffisant pour assurerl’equilibre.
FIGURE 14 – Bielle 2 a l’equilibre (forceset moments).
Cette equation est suffisante en mecanique du point pour assurer l’equilibre. Pourtantelle n’est pas suffisante en mecanique des solides car on comprend vite sur la figure 13 quel’equilibre en rotation n’est pas assure.
Pour eviter que la bielle ne tourne, les deux forces doivent non seulement etre opposees
et de meme normes, mais doivent aussi etre collineaires a−→AB (figure 14).
L’equilibre en rotation s’ecrit comme la somme des moments exterieurs (en un point
quelconque A) nulle :∑ ~MA,ext = ~0. Appliquee a la bielle, l’equilibre des moments s’ecrit :
~MA,1/2 + ~MA,3/2 = ~0
Le moment en A de ~F1/2 est nul (force appliquee en A) et le moment en A de ~F3/2 est nul
ssi ~F3/2 est collineaire a−→AB.
2.4 Etude de l’equilibre de l’arbre
L’arbre est soumis a trois actions mecaniques : l’action de 2/1, de 0/1 et de mot/1. L’equi-libre du solide 1 s’ecrit comme la somme des forces exterieures nulles et la somme des mo-ments exterieurs (en un point P ) nuls :
∑~Fext = ~0
∑~MP,ext = ~0
La somme des forces ne pose pas de difficultes. La somme des moments par contre doits’ecrire en un meme point. La rotation principale de l’arbre etant autour de l’axe (O, ~z), on vachoisir le point O.
2.4.1 Action de 2/1
La force ~F2/1 tend a faire tourner l’arbre 1 autour de l’axe (O, ~z). Son moment en O n’estdonc pas nul. Pour comprendre comment calculer le moment de cette force, decomposons-la
en deux composantes radiale et tangentielle : ~F2/1 = ~Fr + ~Ft (figure 15).
La force radiale ~Fr ne tend pas a faire tourner l’arbre 1 autour de (O, ~z) donc son moment
est nul. Par contre, la force tangentielle ~Ft tend pleinement a faire tourner l’arbre. Cette
action sera d’autant plus importante que la norme de ~Ft est grande, et que la distance OAest grande.
Marc Derumaux – LLG page 9

Statique des systemes de solides
FIGURE 15 – Moment de la force ~F2/1 au point O.
Ne gardons pas le secret plus longtemps : la relation generale permettant de calculer lemoment d’une action mecanique est la suivante :
~MO,2/1 = ~MA,2/1︸ ︷︷ ︸
=~0
+~F2/1 ∧−→AO
Cette relation montre bien la proportionnalite de ~MO,2/1 a ~Ft et OA.Elle montre aussi et surtout que la force et le moment forment un torseur car il s’agit
d’une relation de changement de point ! On definit le torseur statique :
T 2/1
=A
~F2/1
~MA,2/1
=A
~F2/1
~0
Le calcul du moment de ~F2/1 conduit a :
~MO,2/1 = ~MA,2/1 + ~F2/1 ∧−→AO = ~0 + F21.~y2 ∧ (−R.~x1) = R.F21. cos(β − θ).~z0
Le torseur s’ecrit donc en O :
T 2/1
=O
~F2/1
~MO,2/1
=O
F21.~y2
R.F21. cos(β − θ).~z0
2.4.2 Action de 0/1
La liaison entre 0 et 1 est susceptible de transmettre une force et un moment commedecrit page 8, qui peuvent se traduire par un torseur d’action mecanique. Ce torseur peuts’ecrire ”en ligne” ou ”en colonne” :
T 0/1
=D
~F0/1
~MD,0/1
=D
X01.~x0 + Y01.~y0 + Z01.~z0
L01.~x0 +M01.~y0
=D
X01
Y01
Z01
L01
M01
0
B0
La reduction en O du torseur s’ecrit :
~MO,0/1 = ~MD,0/1 + ~F0/1 ∧−−→DO =
B0
L01
M01
0+B0
X01
Y01
Z01
∧B0
00d
=B0
L01 + d.Y01
M01 − d.X01
0
D’ou le torseur en O :
T 0/1
=O
X01
Y01
Z01
L01 + d.Y01
M01 − d.X01
0
B0
page 10

Statique des systemes de solides
2.4.3 Action du moteur sur 1
L’action du moteur est un couple, c’est a dire un moment sans force associee :
T mot/1
=M
~0
Cm.~z0
=O
~0
Cm.~z0
Le moment de ce torseur est invariant, quel que soit le point :
~MO,mot/1 = ~MM,mot/1 +~0 ∧−−→MO = Cm.~z0
2.4.4 Equations du PFS
Le principe fondamental de la statique applique au solide 1 s’ecrit sous forme torso-rielle (qui rassemble les equations de force et de moment) :
T 0/1
+
T mot/1
+
T 2/1
= ~0
D’ou les deux equations vectorielles (les moments sont reduits en O) :
~F0/1 + ~Fmot/1 + ~F2/1 = ~0~MO,0/1 + ~MO,mot/1 + ~MO,2/1 = ~0
D’ou les six equations, par projection des equations vectorielles sur la base B0 :
X01 +0 −F21. sin β = 0Y01 +0 +F21. cosβ = 0Z01 +0 +0 = 0L01 + d.Y01 +0 +0 = 0M01 − d.X01+0 +0 = 00 +Cm+R.F21. cos(β − θ)= 0
2.5 Etude de l’equilibre du piston 3
Le PFS applique au piston 3 s’ecrit :
T 0/3
+
T air/3
+
T 2/3
= ~0
Chacun des torseurs s’ecrit :
T 0/3
=C
X03
0Z03
L03
0N03
B0
T air/3
=C
−p.S.~y0
~0
T 2/3
=B
F23.~y2~0
La reduction en C s’ecrit : ~MC,2/3 = ~0 + F23.~y2 ∧−−→BC = F23.~y2 ∧ λ.~y0 = −λ.F23. sin β.~z0
D’ou les six equation du PFS par projection sur la base B0 :
X03+0 −F23. sin β = 00 −p.S+F23. cos β = 0Z03+0 +0 = 0L03+0 +0 = 00 +0 +0 = 0N03+0 −λ.F23. sin β= 0
Marc Derumaux – LLG page 11

Statique des systemes de solides
2.6 Resolution du probleme
Nous avions au total 16 inconnues (5 inconnues pour la pivot, 4 inconnues pour la pivot-glissant, 2× 3 inconnues pour les deux rotules et une inconnue Cm).
Nous avons isole au total 3 solides, applique trois fois le PFS et obtenu 3 × 6 = 18equations, meme si les equations de l’isolement de la bielle 2 n’ont pas ete ecrites expli-citement.
Sur ces 18 equations, seules 16 sont exploitables : deux equations sont degenerees 0 = 0du fait des mobilites internes. On voit que la 5eme equation de l’isolement du piston 3 estdegeneree (aucun moments suivant ~y0 car mobilite en rotation autour de (C, ~y0)) et l’isole-ment de 2 comporte aussi une equation degeneree (mobilite en rotation de la bielle suivant(AB)).
La resolution du systeme a 16 equations et 16 inconnue (qui peut effayer par sa taille) esttriviale car le systeme est creux (c’est a dire que les inconnues ne sont pas dans toutes lesequations).
On trouve : Cm = −R.F21. cos(β − θ)et : F21 = −F12 = F32 = −F23 =
−p.Scos β
d’ou : Cm = R.p.S. cos(β−θ)cos β
Les efforts dans la liaison pivot s’ecrivent :
X01 = F21. sin β = −p.S. tan βY01 = −F21. cos β = p.SZ01 = 0
L01 = −d.p.SM01 = −d.p.S. tan β0 = 0
On peut remarquer que l’expression Y01 = p.S est evidente si on considere qu’en isolant1+2+3, c’est bien la liaison pivot qui encaisse la force verticale de l’air sur le piston.
Ces efforts dans la liaison pivot ne sont cependant pas directement utilisable pour ledimensionnement des roulements. Il faut auparavant decomposer cette action globale endeux actions propres a chaque roulement.
2.7 Retour sur les efforts dans les roulements
La solution constructive de la liaison pivot, constituee de deux roulements, est modeliseepar deux liaisons rotules sur le schema cinematique figure 16. Nous reviendrons plus tardsur les raisons de ce choix (paragraphe 5.5 page 36).
FIGURE 16 – Modelisation du montage de roulements realisant la liaison pivot 0-1.
La somme des actions mecaniques des deux roulements est egale a l’action globale de laliaison pivot, ce qui s’ecrit :
T 0-E/1
+
T 0-F/1
=
T 0/1
page 12

Statique des systemes de solides
Chaque roulement etant considere comme une rotule (en E et F ), les torseurs d’actionsmecaniques s’ecrivent :
T 0-E/1
=E
XE
YE
ZE
000
B0
T 0-F/1
=F
XF
YF
ZF
000
B0
Reduction des torseurs en D :
~MD,0−E/1 = ~0+B0
XE
YE
ZE
∧B0
00µ
=B0
µ.YE
−µ.XE
0et ~MD,0−F/1 = ~0+
B0
XF
YF
ZF
∧B0
00−µ
=B0
−µ.YF
µ.XF
0
Les six equations scalaires s’ecrivent alors dans la base B0 :
XE +XF = −p.S. tan βYE YF = p.SZE ZF = 0µ.YE −µ.YF = −d.p.S−µ.XE+µ.XF= −d.p.S. tan β0 +0 = 0
La resolution du systeme conduit a :
YE = p.Sµ.(µ− d)
YF = p.Sµ.(−µ− d)
XE = p.Sµ.(−µ + d). tanβ
XF = p.Sµ.(−µ − d). tanβ
Par contre, on s’apercoit que pour ZE et ZF , il y a une infinite de solutions... La resolutionn’est pas possible pour ces deux inconnues car le systeme est hyperstatique, c’est a dire sur-contraint. En effet, les deux roulements bloquent le meme mouvement de translation suivant~z0 ! Il n’est donc pas possible de savoir dans quelle proportion chacun supporte la chargesuivant ~z0 sans considerer la deformation de l’arbre et des roulements.
Il est en general souhaitable d’identifier ce type de difficulte avant de se lancer dansla resolution du probleme. C’est possible en faisant un bilan du nombre d’equations, d’in-connues et de mobilites du systeme. Le chapitre de theorie des mecanismes approfondira cetaspect en 2eme annee.
Dans notre cas, on ecrit 1 equation de torseurs, soit 6 equations scalaires, dont 1 degeneree(mobilite en rotation autour de (O, ~z0)) et 2 × 3 inconnues pour le deux rotules. On obtientdonc un systeme de 5 equations a 6 inconnues. Le degre d’hyperstatisme vaut h = 1.
L’exemple que nous venons de terminer resume l’essentiel des methodes, outils et diffi-cultes d’un probleme de statique. Si vous avez bien compris cet exemple, vous etes armespour la majeur partie des problemes de statique. La suite du cours vise a structurer les in-formations introduites au cours de l’exemple.
Marc Derumaux – LLG page 13

Statique des systemes de solides
3 Action mecanique et Principe Fondamental de la Statique
(PFS)
3.1 Le torseur d’action mecanique (torseur statique)
Une action mecanique s’exercant sur un solide rigide (ou entre deux solides rigides) estcompletement caracterisee par le torseur statique :
T S1/S2
=A
~F1/2
~MA,1/2
Force ~F1/2 : action qui tend a translater le solide 2.
Moment en A ~MA,1/2 : action qui tend a faire tourner le solide 2 autour de A.
Relation de changement de point du torseur :
~MB,1/2 = ~MA,1/2 + ~F1/2 ∧−→AB
Le moment en B est l’action qui tend a faire tourner autour de B.Cas particuliers :
– Force ~F en un point A :
T ~F
=A
~F~0
– Couple ~C :
T ~C
=M
~0~C
, ∀M .
Torseur d’action mecanique transmissible par une liaison
Exemple d’une liaison pivot : la liaison autorise une rotation suivant (A, ~z) et bloqueles autres mouvements, ce qui conduit a des efforts suivant toutes les composantes sauf lesmoments autour de (A, ~z). Les torseurs cinematiques et statiques s’ecrivent :
V2/1
=A
ω.~z~0
T 1/2
=A
X.~x+ Y.~y + Z.~z
L.~x+M.~y
Une liaison parfaite, par definition, ne dissipe pas d’energie, ce qui conduit systemati-
quement les torseurs cinematiques et statiques a verifier la propriete :
T 2/1
⊗
V1/2
=
0
La feuille de liaison distribuee lors du cours de cinematique precise les torseurs statiquesdes differentes liaisons.
Exemple d’une liaison Appui-Plan : la liaison autorise une rotation suivant (A, ~z) et deuxtranslations suivant ~x et ~y, ce qui conduit a des efforts suivant les mouvements bloques. Lestorseurs cinematiques et statiques s’ecrivent :
V2/1
=A
ω.~z
U.~x+ V.~y
T 1/2
=A
Z.~z
L.~x+M.~y
page 14

Statique des systemes de solides
FIGURE 17 – Systeme materiel Σ a l’equilibre dans Rg.
3.2 Enonce du Principe Fondamental de la Statique (PFS)
Principe Fondamental de la StatiqueSoit Σ un systeme materiel.Il existe un repere Rg dit Galileen tel que si Σ est au repos dans Rg, alors la sommedes actions mecaniques de l’exterieur a Σ sur Σ est nulle :
T Σ → Σ
= 0
3.3 Theoreme des actions reciproques
FIGURE 18 – Deux systemes materiels Σ1 et Σ2 a l’equilibre.
Soit Σ l’union de deux systemes materiels Σ1 et Σ2. En appliquant le PFS a Σ1 et Σ2, onobtient :
T Σ1 → Σ1
= 0
T Σ2 → Σ2
= 0
En additionnant les deux equations :(
T Σ → Σ1
+
T Σ2 → Σ1
)
+(
T Σ → Σ2
+
T Σ1 → Σ2
)
= 0
Marc Derumaux – LLG page 15
Statique des systemes de solides
=⇒
T Σ → Σ
+
T Σ2 → Σ1
+
T Σ1 → Σ2
= 0
Sachant que le PFS applique a σ conduit a
T Σ → Σ
= 0
On en deduit :
T Σ2 → Σ1
= −
T Σ1 → Σ2
Si un systeme materiel Σ2 applique une action mecanique
T Σ2 → Σ1
sur Σ1, alors
reciproquement Σ1 applique l’action opposee sur Σ2.
3.4 Methodes de resolution
Soit un systeme constitue de plusieurs solides en liaison et soumis a des actions meca-niques exterieures.
L’objectif d’une etude de statique des solides est de determiner les equations liant lesactions mecaniques s’exercant sur chaques solides.
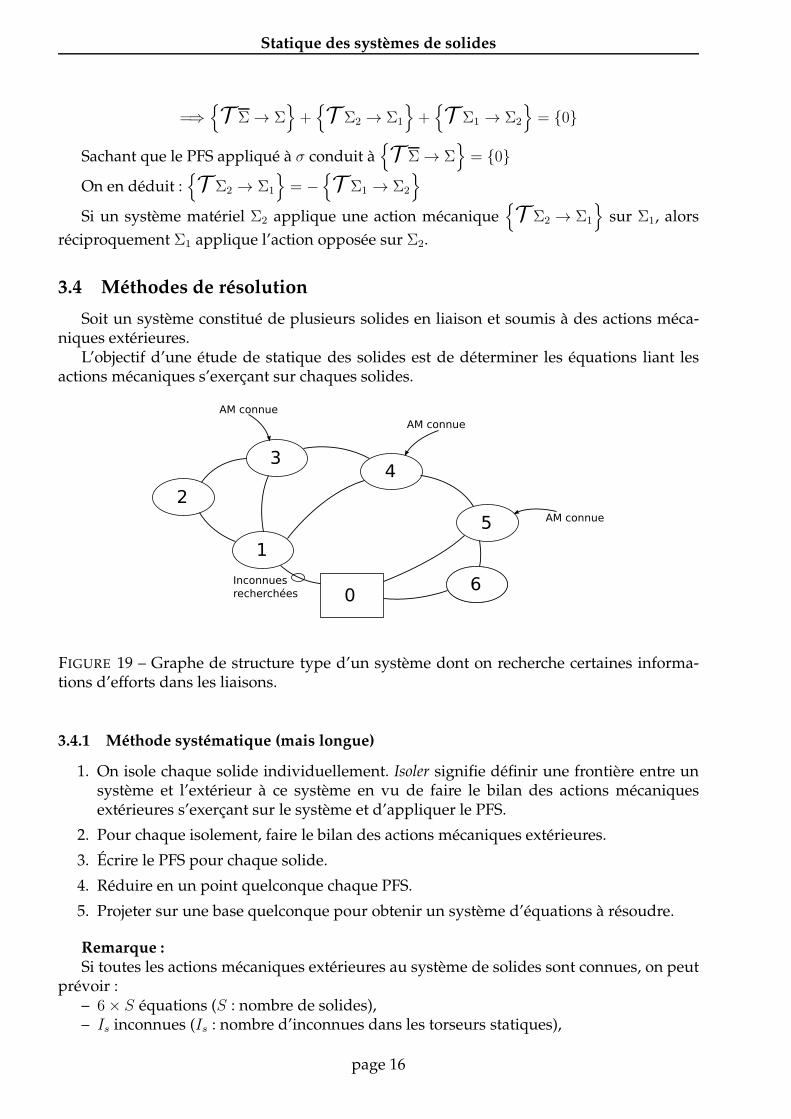
FIGURE 19 – Graphe de structure type d’un systeme dont on recherche certaines informa-tions d’efforts dans les liaisons.
3.4.1 Methode systematique (mais longue)
1. On isole chaque solide individuellement. Isoler signifie definir une frontiere entre unsysteme et l’exterieur a ce systeme en vu de faire le bilan des actions mecaniquesexterieures s’exercant sur le systeme et d’appliquer le PFS.
2. Pour chaque isolement, faire le bilan des actions mecaniques exterieures.
3. Ecrire le PFS pour chaque solide.
4. Reduire en un point quelconque chaque PFS.
5. Projeter sur une base quelconque pour obtenir un systeme d’equations a resoudre.
Remarque :Si toutes les actions mecaniques exterieures au systeme de solides sont connues, on peut
prevoir :– 6× S equations (S : nombre de solides),– Is inconnues (Is : nombre d’inconnues dans les torseurs statiques),
page 16
Statique des systemes de solides
– m equations trivialement verifiees (m : mobilite du systeme).Soit un systeme de Is inconnues, de rang 6 × S − m. Ce systeme peut etre resolu ssi
h = Is−(6×S−m) vaut h = 0 (systeme dit isostatique). Sinon, le systeme est dit hyperstatiqued’ordre h et ne peut etre entierement resolu.
3.4.2 Methode intelligente
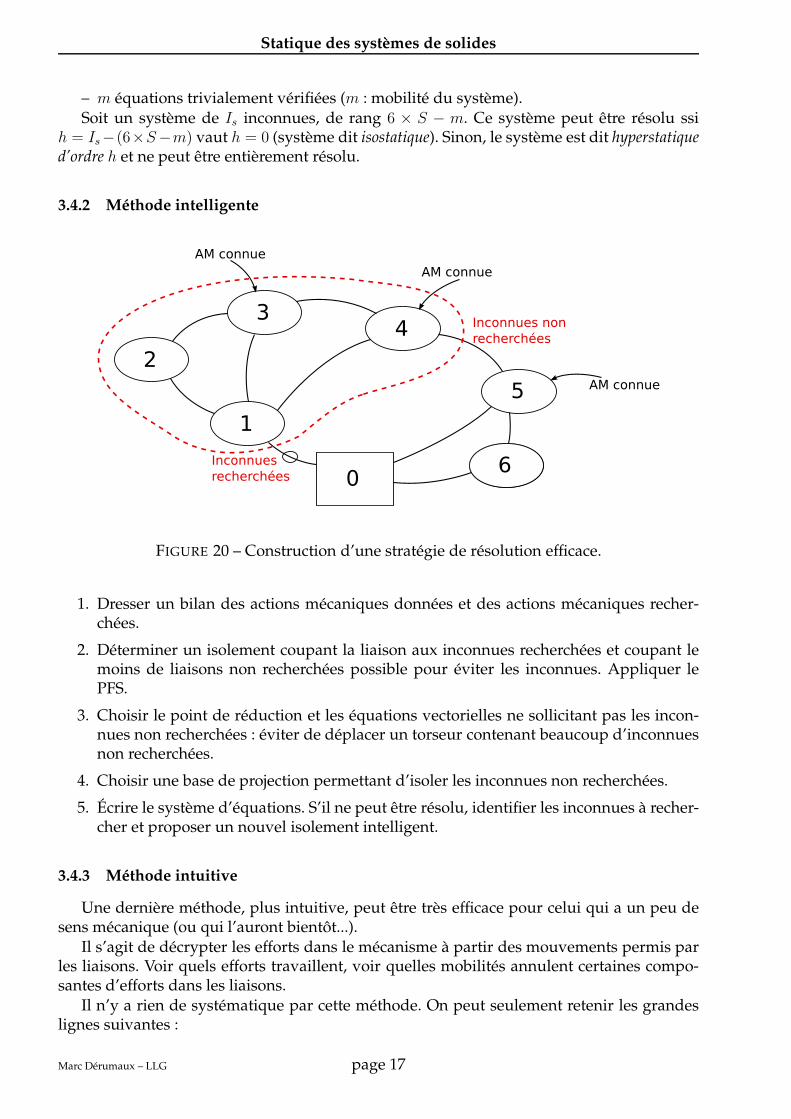
FIGURE 20 – Construction d’une strategie de resolution efficace.
1. Dresser un bilan des actions mecaniques donnees et des actions mecaniques recher-chees.
2. Determiner un isolement coupant la liaison aux inconnues recherchees et coupant lemoins de liaisons non recherchees possible pour eviter les inconnues. Appliquer lePFS.
3. Choisir le point de reduction et les equations vectorielles ne sollicitant pas les incon-nues non recherchees : eviter de deplacer un torseur contenant beaucoup d’inconnuesnon recherchees.
4. Choisir une base de projection permettant d’isoler les inconnues non recherchees.
5. Ecrire le systeme d’equations. S’il ne peut etre resolu, identifier les inconnues a recher-cher et proposer un nouvel isolement intelligent.
3.4.3 Methode intuitive
Une derniere methode, plus intuitive, peut etre tres efficace pour celui qui a un peu desens mecanique (ou qui l’auront bientot...).
Il s’agit de decrypter les efforts dans le mecanisme a partir des mouvements permis parles liaisons. Voir quels efforts travaillent, voir quelles mobilites annulent certaines compo-santes d’efforts dans les liaisons.
Il n’y a rien de systematique par cette methode. On peut seulement retenir les grandeslignes suivantes :
Marc Derumaux – LLG page 17
Statique des systemes de solides
– Reperer rapidement les solides soumis a deux actions mecaniques (deux liaisons avecd’autres solides) : leur isolement doit pouvoir conduire a des simplifications utiles surles actions mecaniques, identifiables sans meme ecrire le PFS.
– Dans le cas des liaisons avec le bati, ecrire les equations de PFS sur les mobilites de cesliaisons permet de determiner comment les efforts se transmettent dans le mecanisme.
Cette methode peut etre appliquee a l’exemple du compresseur :
– On a tout de suite isole la bielle 2 car elle est soumise a deux actions mecaniques (deuxforces dans ce cas). Cette isolement (qui n’a pas ete reellement detaille car le resultatapparaissait immediatement) a permis de definir la direction (AB) des forces et d’af-firmer qu’elles sont de normes identiques et de directions opposees.
– Pour determiner comment d’effort de l’air sur le piston est transmis jusqu’au moteur,il faut isoler le piston et appliquer le PFS en resultante suivant ~y0 pour determinerl’effort en B (car la liaison pivot-glissant autorise une translation suivant ~y0 et parceque la force travaille dans ce mouvement). L’isolement de 2 donne l’effort en A. Ontermine en isolant 1, PFS en moment suivant (O, ~z0) pour determiner le couple moteur(car la liaison pivot autorise une rotation suivant (O, ~z0)).
3.4.4 Exemple : Systeme de freinage du TGV
On cherche a determiner l’effort exerce par le verin, en supposant connus les effortsdu disque D sur les garnitures G1 et G2 appliques aux points I1 et I2 (ces efforts serontdetermines par la suite) :
~FD/G1= N.~z − T.~x ~FD/G1
= −N.~z − T.~x
Proposer un graphe de structure du systeme de freinage.
Proposer une demarche de resolution en precisant pour chaque isolement l’equation sca-laire ecrite.
Developper les calculs et en deduire l’action mecanique exercee par le verin.
Pour les plus bes... d’entre vous, vous pouvez essayer de faire un bilan des equationsdisponibles, des inconnues et des mobilites (utiles et internes) pour determiner le degred’hyperstatisme, voire de retrouver quelles inconnues ne pourront pas etre determinees.Bonne chance...
3.5 Modelisation plane en statique
Un probleme de statique est dit plan si :
– Tous les efforts sont dans le plan,– Tous les moments sont normaux au plan.
Pour qu’un probleme de statique soit plan, il faut que la geometrie soit symetrique parrapport a un plan ou invariante dans la direction normale au plan, et que le chargement soitplan.
page 18

Statique des systemes de solides
4 Modelisation des actions mecaniques
La matiere (liquide, solide ou gazeuse) est constituee d’atomes. Mais a l’echelle ou lamatiere est consideree comme liquide, solide ou gazeuse, les atomes sont suffisamment pe-tits pour modeliser la matiere comme une repartition continue.
Les actions mecaniques s’appliquent sur cette matiere continue. La plupart peuvent se
modeliser mathematiquement sous la forme d’un champ de vecteur ~F (M) volumique ousurfacique.
Dans le point de vue des solides rigides, l’expression du PFD necessite de connaıtre lesactions mecaniques s’exercant globalement sur le systeme. Le calcul de l’action globale apartir de la repartition locale d’effort est une simple somme (ou integration) des actionslocales.
4.1 Action mecanique volumique
Soit Σ un systeme materiel. Une action mecanique volumique ~f(M) est un champ devecteurs associe a une mesure dµ, qui a tout point M de Σ associe une action mecanique~f(M).dµ s’exercant sur la mesure dµ au voisinage de M (figure 21).
FIGURE 21 – Action volumique ~f(M) s’exercant sur un systeme materiel Σ.
Exemple : la pesanteur L’action volumique s’ecrit ~fpoids = ~g, associee a dm l’element de
masse. L’action mecanique elementaire s’exercant sur dm s’ecrit−→dP poids = ~g.dm.
L’action globale du poids sur Σ peut s’ecrire sous la forme d’un torseur :
T poids/Σ
=A
~Ppoids
~MA,poids
Chacune des composantes du torseur est la somme des actions elementaires :
~Ppoids =
∫∫∫
Σ
−g.~z.dm et ~MA,poids =
∫∫∫
Σ
−−→AM ∧ −g.~z.dm
La masse m totale du solide s’ecrit : m =
∫∫∫
Σ
dm, d’ou l’expression de la resultante :
~Ppoids = −m.g.~z.
Marc Derumaux – LLG page 19

Statique des systemes de solides
Soit G le centre de gravite de solide :−→AG =
1
m
∫∫∫
Σ
−−→AM.dm. On en deduit l’expression du
moment :~MA,poids =
∫∫∫
Σ
−−→AM ∧ −g.~z.dm = m.
−→AG ∧ −g.~z
.
On remarque que si A = G, ~MA,poids = ~0, d’ou
T poids/Σ
=G
−m.g.~z
~0
. Ce torseur
est un glisseur de support (G,~z).
4.2 Action mecanique surfacique
Soit Σ un systeme materiel. Une action mecanique surfacique ~F (M) est un champ devecteurs associe a une mesure dµ, qui a tout point M de la surface ∂Σ de Σ associe une
action mecanique ~F (M).dµ s’exercant sur la mesure dµ au voisinage de M (figure 22).
FIGURE 22 – Action surfacique ~F (M) s’exercant sur le bord ∂Σ d’un systeme materiel Σ.
Exemple : pression d’un fluide parfait (ou au repos) sur un solide L’action surfacique
s’ecrit ~Fpression(M) = −p(M).~n, associee a l’element de surface dS. p(M) est la pression dufluide en M et ~n la normale a la surface en M (figure 22).
L’effort de pression elementaire est alors−→dP pression = −p.~n.dS.
L’action globale se calcule par integration, de facon similaire a l’action volumique.
Theoreme d’Archimede L’action d’un fluide au repos sur un solide immerge est egale al’oppose du poids des fluides deplaces.
Soit G′ le centre de gravite du volume d’eau contenu dans S, l’action de l’eau sur S est
equivalente a une force ~Feau/S = ρeau.V.g.~z appliquee en G′, ou ρeau est la masse volumiquede l’eau, V le volume de S, g l’acceleration de la pesanteur et ~z la verticale ascendante.
4.3 Modelisation d’un contact ponctuel entre deux solides – Lois de Cou-
lomb
Le contact entre deux solide n’est jamais ”ponctuel” : il y a toujours une surface decontact entre les deux solides. Cependant, cette surface peut etre petite devant les dimen-
page 20
Statique des systemes de solides
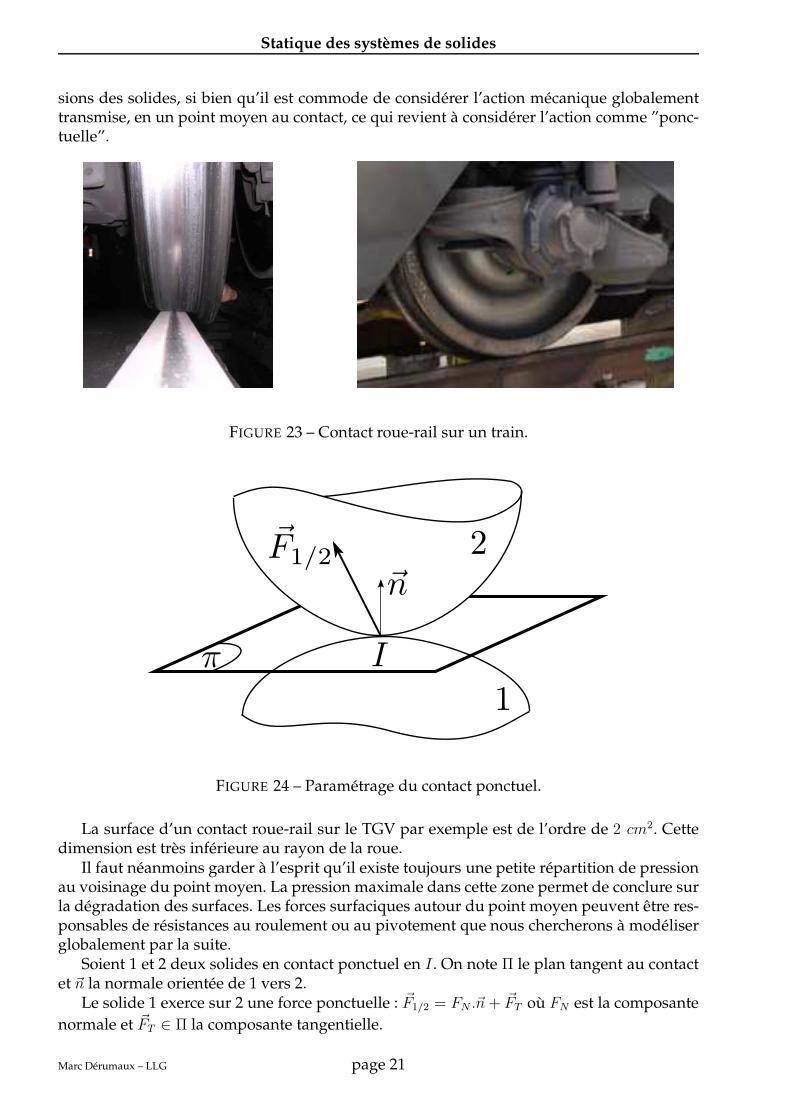
sions des solides, si bien qu’il est commode de considerer l’action mecanique globalementtransmise, en un point moyen au contact, ce qui revient a considerer l’action comme ”ponc-tuelle”.
FIGURE 23 – Contact roue-rail sur un train.
FIGURE 24 – Parametrage du contact ponctuel.
La surface d’un contact roue-rail sur le TGV par exemple est de l’ordre de 2 cm2. Cettedimension est tres inferieure au rayon de la roue.
Il faut neanmoins garder a l’esprit qu’il existe toujours une petite repartition de pressionau voisinage du point moyen. La pression maximale dans cette zone permet de conclure surla degradation des surfaces. Les forces surfaciques autour du point moyen peuvent etre res-ponsables de resistances au roulement ou au pivotement que nous chercherons a modeliserglobalement par la suite.
Soient 1 et 2 deux solides en contact ponctuel en I . On note Π le plan tangent au contactet ~n la normale orientee de 1 vers 2.
Le solide 1 exerce sur 2 une force ponctuelle : ~F1/2 = FN .~n+ ~FT ou FN est la composante
normale et ~FT ∈ Π la composante tangentielle.
Marc Derumaux – LLG page 21
Statique des systemes de solides
4.3.1 Contact sans frottement
Le contact sans frottement impose :
– ~F1/2 colineaire a ~n (non frottement),
– ~F1/2 de meme sens que ~n (condition de contact unilateral),
– ~VI,2/1.~n = 0 (condition de contact persistant) ou ~VI,2/1.~n ≥ 0 (condition de contact nonpersistant).
4.3.2 Contact avec frottement 4 : Modele de Coulomb
Cas de l’adherence en I :Non glissement : ~VI,2/1 = ~0
Limite sur l’action tangentielle : ‖~FT‖ ≤ f.FN (FN ≥ 0).
Cas du glissement en I :
Condition de contact : ~VI,2/1 ∈ Π
Action tangentielle : ‖~FT‖ = f.FN (FN ≥ 0),
Sens de l’action tangentielle : ~FT de meme direction et de sens oppose a ~VI,2/1.
f est le coefficient de frottement (sans unite). Il s’agit d’un coefficient mesure experimen-talement, qui depend des materiaux en contact, de la qualite des surfaces et des lubrifiantspresents sur les surfaces.
Un coefficient de frottement n’est jamais tres precisement connu. On admet generalementune precision de l’ordre de 20 a 40%.
Exemples de coefficients de frottement :Materiaux en contact coefficients de frottementAcier/acier (sec) 0.2Acier/acier (lubrifie) 0.1Bronze/bronze ou laiton (sec) 0.2Acier/bronze ou laiton (sec) 0.2Acier/bronze ou laiton (lubrifie) 0.08Acier/teflon 0.05Lubrification hydrodynamique 0.005Pneu/bitume sec 0.8Pneu/bitume humide 0.6
Le bronze est un alliage de cuivre et d’etain (et de plomb lorsqu’il est utilise pour reduirele frottement). Le laiton est un alliage de cuivre et de zinc. Ils presentent de bonnes pro-prietes de frottement face a l’acier (en terme d’usure et de grippage), et conduisent (evacuent)tres bien la chaleur.
Le Teflon PTFE (polytetrafluoroethylene) est un polymere possedant de tres bonnes pro-prietes de frottement (coefficient faible).
Les lois de Coulomb representent le modele le plus simple permettant de tenir comptedu phenomene de frottement. Il est bien evident que la realite est plus complexe : souvent,ce coefficient depend de beaucoup d’autres parametres comme temperature, la rugosite dessurfaces, la vitesse de glissement, etc...
4. Pour tout savoir sur le frottement et la tribologie en general : http ://fr.wikibooks.org/wiki/Tribologie
page 22
Statique des systemes de solides
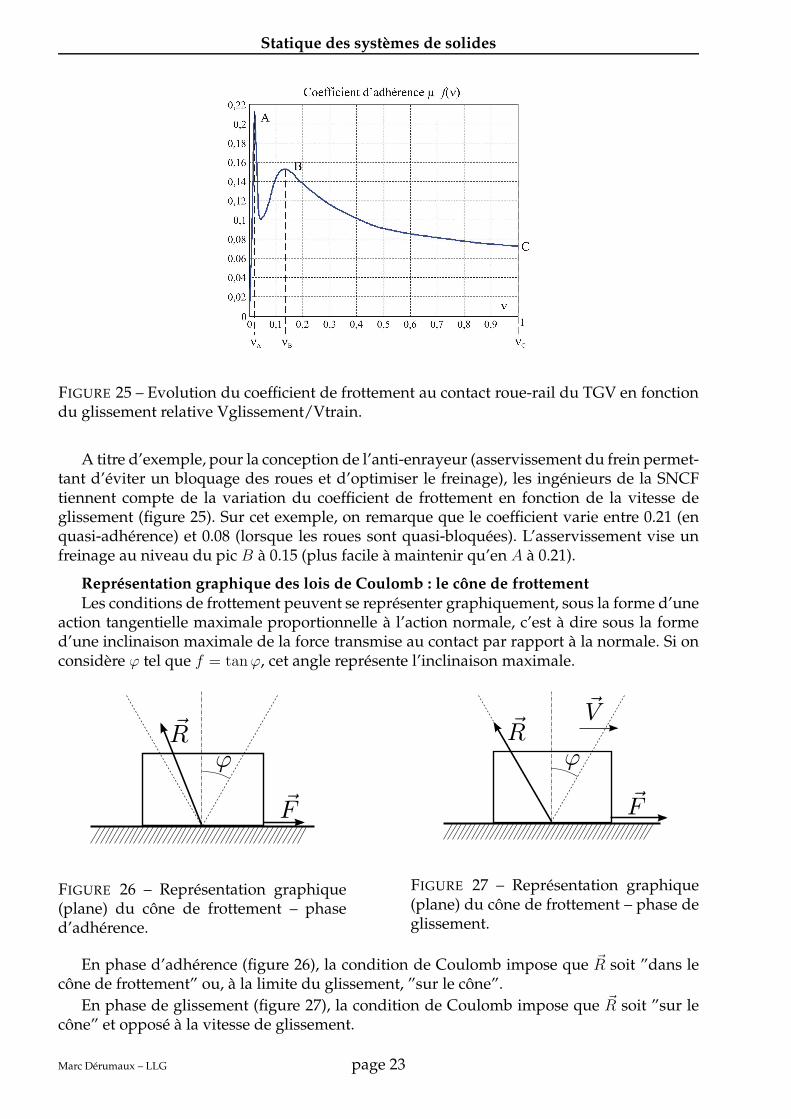
FIGURE 25 – Evolution du coefficient de frottement au contact roue-rail du TGV en fonctiondu glissement relative Vglissement/Vtrain.
A titre d’exemple, pour la conception de l’anti-enrayeur (asservissement du frein permet-tant d’eviter un bloquage des roues et d’optimiser le freinage), les ingenieurs de la SNCFtiennent compte de la variation du coefficient de frottement en fonction de la vitesse deglissement (figure 25). Sur cet exemple, on remarque que le coefficient varie entre 0.21 (enquasi-adherence) et 0.08 (lorsque les roues sont quasi-bloquees). L’asservissement vise unfreinage au niveau du pic B a 0.15 (plus facile a maintenir qu’en A a 0.21).
Representation graphique des lois de Coulomb : le cone de frottementLes conditions de frottement peuvent se representer graphiquement, sous la forme d’une
action tangentielle maximale proportionnelle a l’action normale, c’est a dire sous la formed’une inclinaison maximale de la force transmise au contact par rapport a la normale. Si onconsidere ϕ tel que f = tanϕ, cet angle represente l’inclinaison maximale.
FIGURE 26 – Representation graphique(plane) du cone de frottement – phased’adherence.
FIGURE 27 – Representation graphique(plane) du cone de frottement – phase deglissement.
En phase d’adherence (figure 26), la condition de Coulomb impose que ~R soit ”dans lecone de frottement” ou, a la limite du glissement, ”sur le cone”.
En phase de glissement (figure 27), la condition de Coulomb impose que ~R soit ”sur lecone” et oppose a la vitesse de glissement.
Marc Derumaux – LLG page 23

Statique des systemes de solides
Le modele de Coulomb interdit a la force ~R d’etre hors du cone.Ces representations planes sont a interpreter en trois dimensions. Le secteur angulaire
est alors effectivement un cone, de demi-angle au sommet ϕ (figure 28).
FIGURE 28 – Representation 3D du cone de frottement.
On utilise parfois deux coefficients differents selon qu’il y a adherence ou glissement. Onparle alors de coefficient d’adherence et de coefficient de frottement. Le coefficient d’adherenceest legerement superieur au coefficient de frottement.
4.3.3 Contact ponctuelle avec resistance au roulement ou au pivotement
Soit ~Ω2/1 6= ~0 et ~MI,1/2 = MN .~n + ~MT le moment transmis.
On note ~Ω2/1 = ωP .~n+ ~ΩR ou ωP est la composante de pivotement et ~ΩR la composante de
roulement (~ΩR ∈ Π).On peut modeliser la resistance au pivotement ou au roulement sous la forme :– Si ΩP = 0, |MN | ≤ δ.FN ,– Si ΩP 6= 0, |MN | = δ.FN et MN oppose a ωP ,
– Si ~ΩR = ~0, ‖ ~MT‖ ≤ µ.FN ,
– Si ~ΩR 6= ~0, ‖ ~MT‖ = µ.FN et ~MT oppose a ~ΩR et de meme direction.δ est le coefficient de resistance au pivotement (exprime en metres) et µ est le coefficient
de resistance au roulement (exprime en metres).Exemple de coefficient de resistance au roulement :– Acier sur acier (trains) : 10−5 m,– Pneu sur bitume (camions) : 10−2 m.
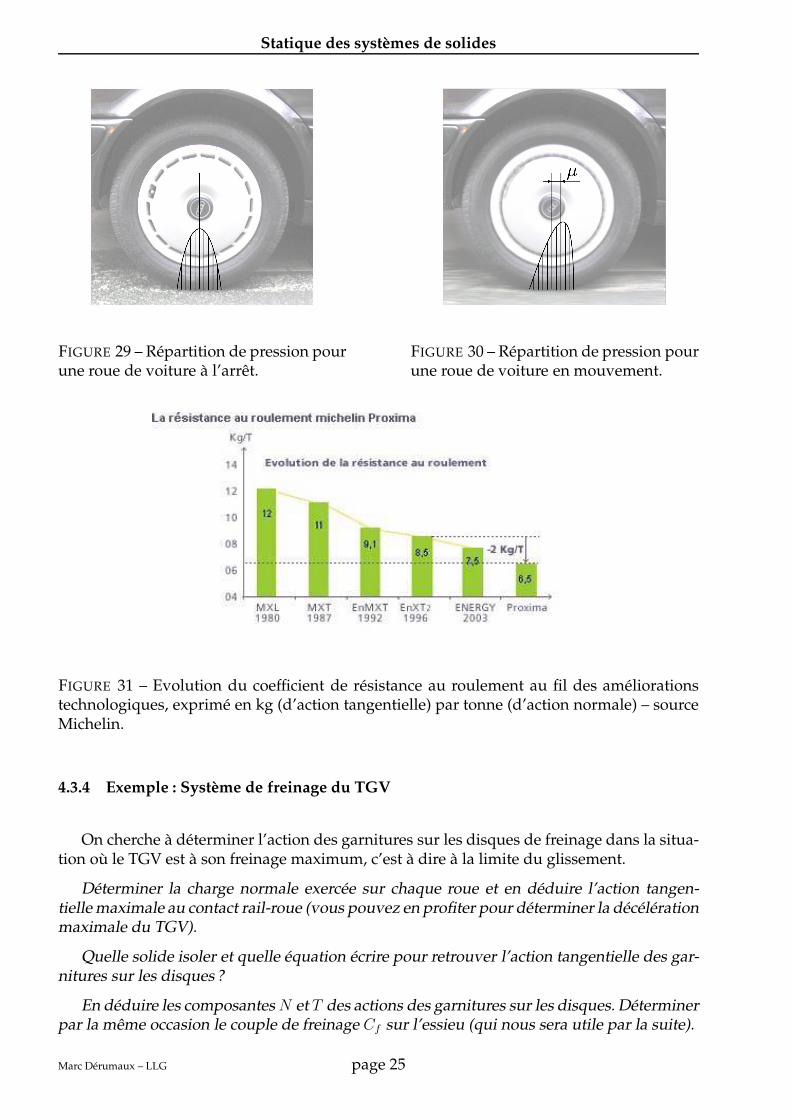
Cas du pneu de voiture :
A l’arret, la deformation symetrique du pneu conduit a une repartition de pression syme-trique (figure 29) et une resultante des forces passant par l’axe de rotation de la roue.
Lorsque le vehicule est en mouvement, la deformation elastique du pneu presente unhysteresis qui conduit a une repartition de pression non symetrique (figure 30) : la pressionest plus forte a l’avant du pneu qu’a l’arriere. La resultante des forces passe a une distanceµ de l’axe de rotation, ce qui cree une resistance au roulement.
page 24
Statique des systemes de solides
FIGURE 29 – Repartition de pression pourune roue de voiture a l’arret.
FIGURE 30 – Repartition de pression pourune roue de voiture en mouvement.
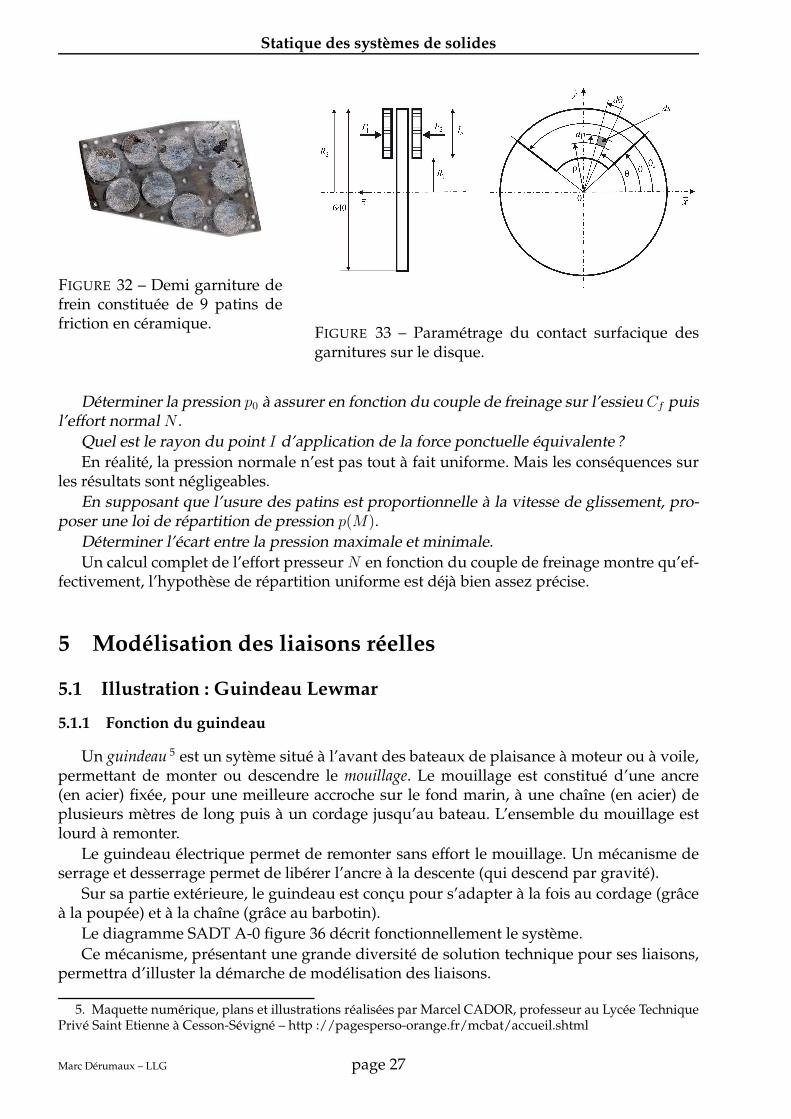
FIGURE 31 – Evolution du coefficient de resistance au roulement au fil des ameliorationstechnologiques, exprime en kg (d’action tangentielle) par tonne (d’action normale) – sourceMichelin.
4.3.4 Exemple : Systeme de freinage du TGV
On cherche a determiner l’action des garnitures sur les disques de freinage dans la situa-tion ou le TGV est a son freinage maximum, c’est a dire a la limite du glissement.
Determiner la charge normale exercee sur chaque roue et en deduire l’action tangen-tielle maximale au contact rail-roue (vous pouvez en profiter pour determiner la decelerationmaximale du TGV).
Quelle solide isoler et quelle equation ecrire pour retrouver l’action tangentielle des gar-nitures sur les disques ?
En deduire les composantes N et T des actions des garnitures sur les disques. Determinerpar la meme occasion le couple de freinage Cf sur l’essieu (qui nous sera utile par la suite).
Marc Derumaux – LLG page 25

Statique des systemes de solides
4.4 Contact surfacique entre deux solides
Lorsque la surface de contact n’est pas petite devant la geometrie du mecanisme, il n’estplus possible de faire l’hypothese de contact ponctuel. L’action entre les deux solides estsurfacique et les lois de Coulomb doivent etre ecrites localement (de facon similaire a celledu contact ponctuel).
On note ~n(M) la normale de 1 vers 2 en M .
4.4.1 Contact surfacique sans frottement
~F1/2(M) colineaire a ~n et de meme sens. ~F1/2(M) est homogene a une pression (N/m2 =Pa).
4.4.2 Contact surfacique avec frottement : modele de Coulomb
~F1/2 = FN (M).~n + ~FT (M)
Cas de l’adherence :Non glissement : ~VM,2/1 = ~0
Limite sur l’action tangentielle : ‖~FT (M)‖ ≤ f.FN (M), ou FN(M) ≥ 0.
Cas du glissement :
Condition de contact : ~VM,2/1 ∈ Π
Action tangentielle : ‖~FT (M)‖ = f.FN (M), ou FN(M) ≥ 0,
Sens de l’action tangentielle : ~FT (M) de meme direction et de sens oppose a ~VM,2/1.
4.4.3 Le probleme de la repartition de pression normale
Malheureusement, tout n’est pas si simple car la repartition de pression normale sur lasurface ne peut etre determinee par la mecanique des solides rigides : il faut tenir compte dela deformation des surfaces.
Pour mener le calcul sans passer par une resolution numerique (type elements finis), ilfaut faire des hypotheses sur la forme de cette repartition. Le calcul de la vitesse de glissementet l’application des lois de coulomb permet ensuite de determiner l’action tangentielle.
4.4.4 Exemple : Systeme de freinage du TGV
L’action des garnitures n’est pas ponctuelle mais surfacique. On cherche a determinerl’erreur commise sur le couple de freinage en supposant cette action comme ponctuelle auxpoints I1 et I2.
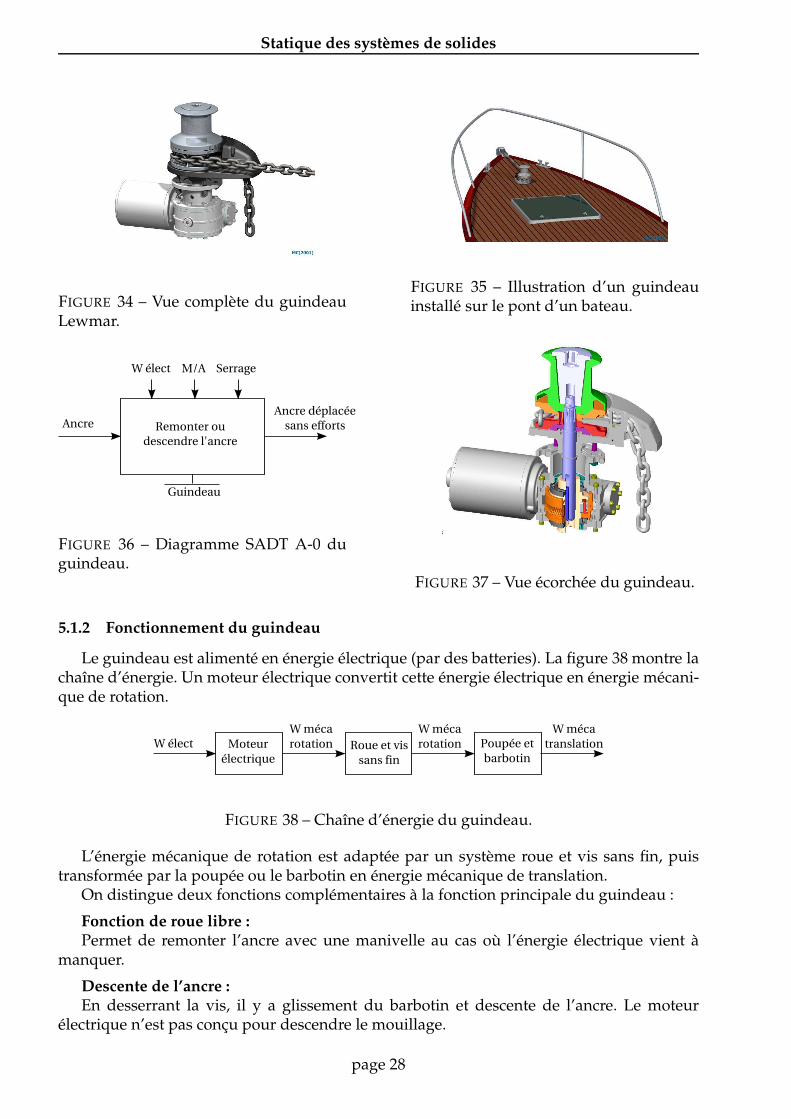
Chaque garniture est constituee de 18 patins circulaires comme le montrent les figures 4et 32. Le calcul tenant compte de la repartition des patins est difficile a mettre en equationsi bien que l’on considere en premiere approximation un contact surfacique sur une portionde disque comme precise sur la figure 33. Le resultat sera extrapole ensuite en utilisant lerapport des surfaces des patins et de la portion de disque.
La repartition de pression normale p(M) est inconnue. On la suppose dans un premiertemps uniforme : p(M) = p0.
Exprimer les lois locales de Coulomb en M .
page 26
Statique des systemes de solides
FIGURE 32 – Demi garniture defrein constituee de 9 patins defriction en ceramique.
FIGURE 33 – Parametrage du contact surfacique desgarnitures sur le disque.
Determiner la pression p0 a assurer en fonction du couple de freinage sur l’essieu Cf puisl’effort normal N .
Quel est le rayon du point I d’application de la force ponctuelle equivalente ?
En realite, la pression normale n’est pas tout a fait uniforme. Mais les consequences surles resultats sont negligeables.
En supposant que l’usure des patins est proportionnelle a la vitesse de glissement, pro-poser une loi de repartition de pression p(M).
Determiner l’ecart entre la pression maximale et minimale.
Un calcul complet de l’effort presseur N en fonction du couple de freinage montre qu’ef-fectivement, l’hypothese de repartition uniforme est deja bien assez precise.
5 Modelisation des liaisons reelles
5.1 Illustration : Guindeau Lewmar
5.1.1 Fonction du guindeau
Un guindeau 5 est un syteme situe a l’avant des bateaux de plaisance a moteur ou a voile,permettant de monter ou descendre le mouillage. Le mouillage est constitue d’une ancre(en acier) fixee, pour une meilleure accroche sur le fond marin, a une chaıne (en acier) deplusieurs metres de long puis a un cordage jusqu’au bateau. L’ensemble du mouillage estlourd a remonter.
Le guindeau electrique permet de remonter sans effort le mouillage. Un mecanisme deserrage et desserrage permet de liberer l’ancre a la descente (qui descend par gravite).
Sur sa partie exterieure, le guindeau est concu pour s’adapter a la fois au cordage (gracea la poupee) et a la chaıne (grace au barbotin).
Le diagramme SADT A-0 figure 36 decrit fonctionnellement le systeme.
Ce mecanisme, presentant une grande diversite de solution technique pour ses liaisons,permettra d’illuster la demarche de modelisation des liaisons.
5. Maquette numerique, plans et illustrations realisees par Marcel CADOR, professeur au Lycee TechniquePrive Saint Etienne a Cesson-Sevigne – http ://pagesperso-orange.fr/mcbat/accueil.shtml
Marc Derumaux – LLG page 27
Statique des systemes de solides
FIGURE 34 – Vue complete du guindeauLewmar.
FIGURE 35 – Illustration d’un guindeauinstalle sur le pont d’un bateau.
FIGURE 36 – Diagramme SADT A-0 duguindeau.
FIGURE 37 – Vue ecorchee du guindeau.
5.1.2 Fonctionnement du guindeau
Le guindeau est alimente en energie electrique (par des batteries). La figure 38 montre lachaıne d’energie. Un moteur electrique convertit cette energie electrique en energie mecani-que de rotation.
FIGURE 38 – Chaıne d’energie du guindeau.
L’energie mecanique de rotation est adaptee par un systeme roue et vis sans fin, puistransformee par la poupee ou le barbotin en energie mecanique de translation.
On distingue deux fonctions complementaires a la fonction principale du guindeau :
Fonction de roue libre :Permet de remonter l’ancre avec une manivelle au cas ou l’energie electrique vient a
manquer.
Descente de l’ancre :En desserrant la vis, il y a glissement du barbotin et descente de l’ancre. Le moteur
electrique n’est pas concu pour descendre le mouillage.
page 28
Statique des systemes de solides
5.1.3 Problematique
Le guindeau est susceptible de subir des efforts importants, lors d’une tempete ou lorsquel’ancre reste accrochee au fond. Lors de la conception du systeme, il est necessaire de deter-miner les actions mecaniques dans les liaisons afin de les dimensionner correctement.
L’ingenieur passe donc par un modele du systeme reel (figure 39), adapte au problemetechnologique pose (ici l’etude des efforts) et permettant de developper des calculs abou-tissant a des resultats chiffres. Ces resultats chiffres sont interpretes a la lueur du problemepose pour dimensionner la solution technique.
FIGURE 39 – Situation de l’etape de modelisation dans le dialogue modele-reel.
Methode :– Modeliser le mecanisme et ses liaisons, sous forme d’un schema cinematique de la
solution constructive,– Modeliser les actions mecaniques exterieures,– Resoudre le probleme,– Dimensionner les liaisons.Nous nous interessons dans cette partie uniquement a la modelisation des liaisons. Le
reste de la demarche a deja ete developpe et illustre dans les parties precedentes.La modelisation est une activite delicate car elle n’est pas systematique : il s’agit d’in-
terpreter les phenomenes physiques presents afin d’identifier le modele theorique (la liaisonparfaite choisie) le mieux a meme de representer la realite sans compliquer inutilement lemodele.
On peut identifier 4 phenomenes essentiels et delicats dans ce travail de modelisation enstatique :
– l’influence de la taille relative de la zone de contact,– l’influence du jeu dans la liaison,– l’influence du frottement,– le cas des composants de liaisons (type roulements).Chaque cas est developpe par la suite.
5.2 Influence de la taille relative de la zone de contact
Un certain nombre de liaisons parfaites presentent un contact ponctuel ou lineique :Ponctuelle, lineaire rectiligne, lineaire annulaire... Or, pour transmettre un effort, un contactest necessairement surfacique.
Marc Derumaux – LLG page 29
Statique des systemes de solides
Pourtant, selon la taille de la zone de contact, la liaison choisi sera a contact theoriquesurfacique ou pas.
5.2.1 Cas d’ecole
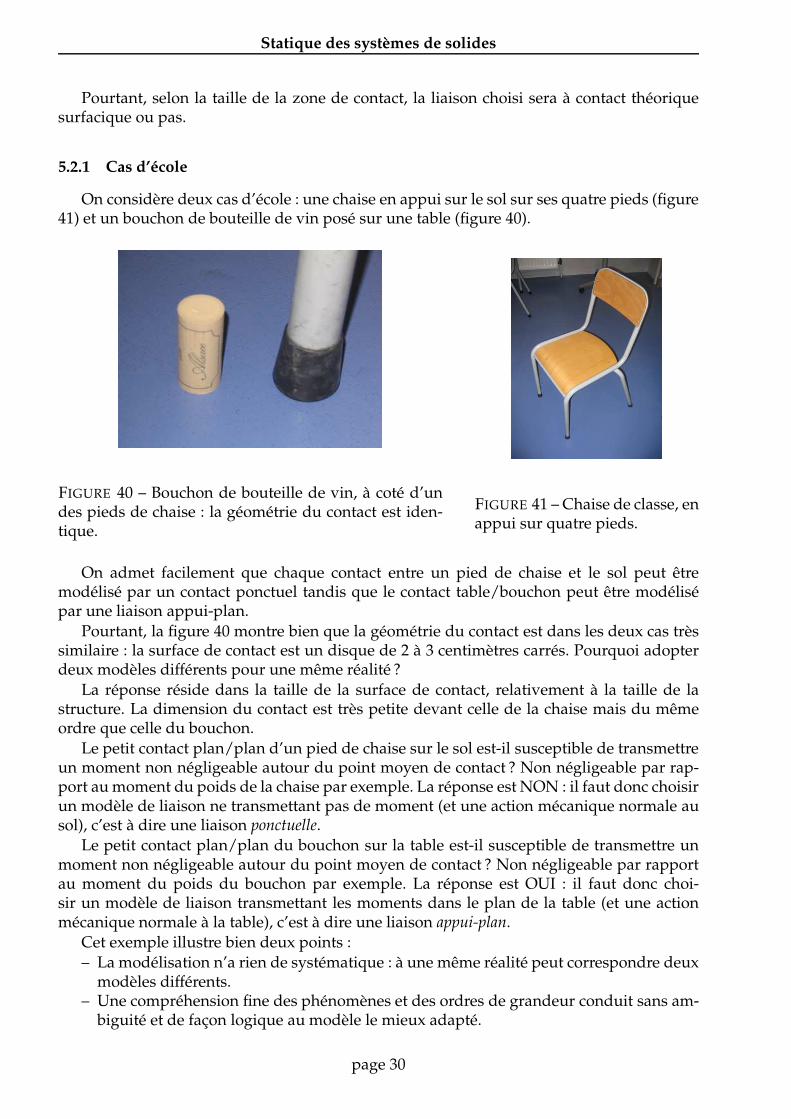
On considere deux cas d’ecole : une chaise en appui sur le sol sur ses quatre pieds (figure41) et un bouchon de bouteille de vin pose sur une table (figure 40).
FIGURE 40 – Bouchon de bouteille de vin, a cote d’undes pieds de chaise : la geometrie du contact est iden-tique.
FIGURE 41 – Chaise de classe, enappui sur quatre pieds.
On admet facilement que chaque contact entre un pied de chaise et le sol peut etremodelise par un contact ponctuel tandis que le contact table/bouchon peut etre modelisepar une liaison appui-plan.
Pourtant, la figure 40 montre bien que la geometrie du contact est dans les deux cas tressimilaire : la surface de contact est un disque de 2 a 3 centimetres carres. Pourquoi adopterdeux modeles differents pour une meme realite ?
La reponse reside dans la taille de la surface de contact, relativement a la taille de lastructure. La dimension du contact est tres petite devant celle de la chaise mais du memeordre que celle du bouchon.
Le petit contact plan/plan d’un pied de chaise sur le sol est-il susceptible de transmettreun moment non negligeable autour du point moyen de contact ? Non negligeable par rap-port au moment du poids de la chaise par exemple. La reponse est NON : il faut donc choisirun modele de liaison ne transmettant pas de moment (et une action mecanique normale ausol), c’est a dire une liaison ponctuelle.
Le petit contact plan/plan du bouchon sur la table est-il susceptible de transmettre unmoment non negligeable autour du point moyen de contact ? Non negligeable par rapportau moment du poids du bouchon par exemple. La reponse est OUI : il faut donc choi-sir un modele de liaison transmettant les moments dans le plan de la table (et une actionmecanique normale a la table), c’est a dire une liaison appui-plan.
Cet exemple illustre bien deux points :
– La modelisation n’a rien de systematique : a une meme realite peut correspondre deuxmodeles differents.
– Une comprehension fine des phenomenes et des ordres de grandeur conduit sans am-biguite et de facon logique au modele le mieux adapte.
page 30
Statique des systemes de solides
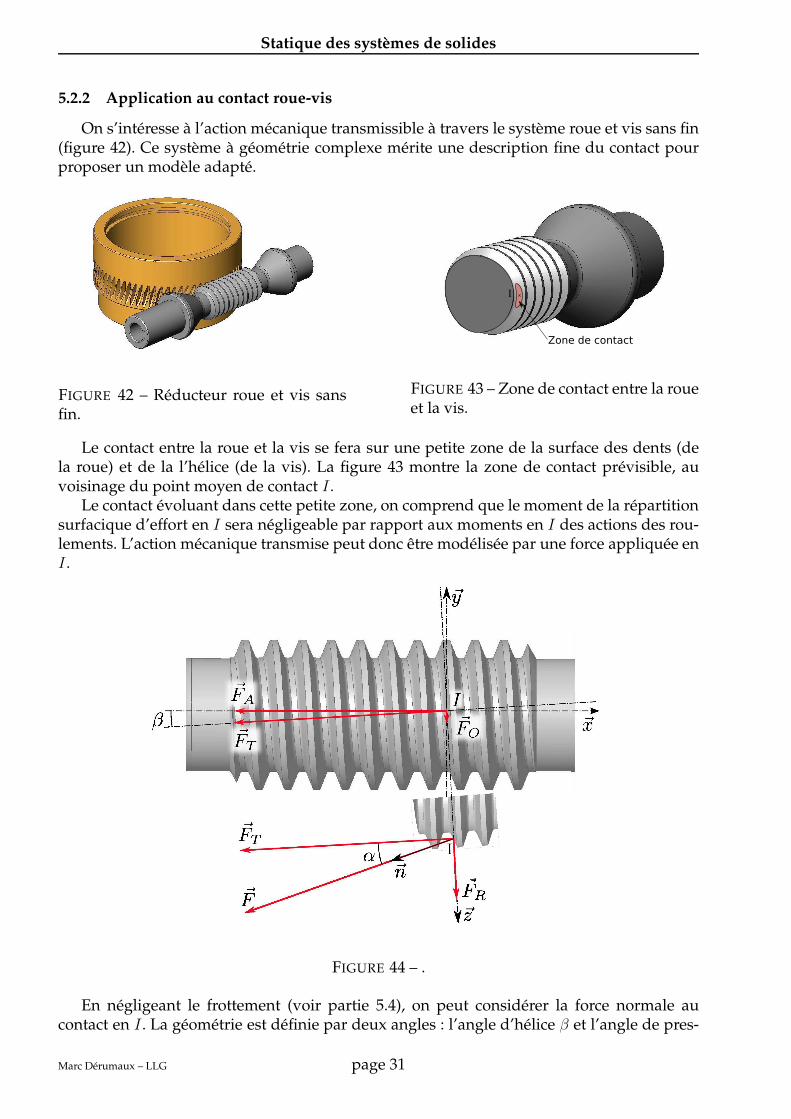
5.2.2 Application au contact roue-vis
On s’interesse a l’action mecanique transmissible a travers le systeme roue et vis sans fin(figure 42). Ce systeme a geometrie complexe merite une description fine du contact pourproposer un modele adapte.
FIGURE 42 – Reducteur roue et vis sansfin.
FIGURE 43 – Zone de contact entre la roueet la vis.
Le contact entre la roue et la vis se fera sur une petite zone de la surface des dents (dela roue) et de la l’helice (de la vis). La figure 43 montre la zone de contact previsible, auvoisinage du point moyen de contact I .
Le contact evoluant dans cette petite zone, on comprend que le moment de la repartitionsurfacique d’effort en I sera negligeable par rapport aux moments en I des actions des rou-lements. L’action mecanique transmise peut donc etre modelisee par une force appliquee enI .
FIGURE 44 – .
En negligeant le frottement (voir partie 5.4), on peut considerer la force normale aucontact en I . La geometrie est definie par deux angles : l’angle d’helice β et l’angle de pres-
Marc Derumaux – LLG page 31

Statique des systemes de solides
sion α. La figure 44 montre la decomposition de l’effort au contact ~F en ses composantesaxiale (sur ~x), orthoradiale (sur ~y) et radiale (sur ~z).
~F = F.~n = ~FT + ~FR = (~FA + ~FO) + ~FR = −FA.~x− FO.~y + FRr.~z
FR = F. sinα FT = F. cosα FA = F. cosα cos β FO = F. cosα sin β
On en deduit le torseur d’action mecanique transmissible :
T Vis/Roue
=I
−F. cosα cos β−F. cosα sin β
F. sinα
000
(~x, ~y, ~z)
5.2.3 Application au guidage par surfaces coniques
Le second exemple porte sur le guidage du barbotin par rapport a l’arbre (fixe lors de laphase de descente), par surfaces coniques. La figure 45 montre les deux pieces constituant lebarbotin et les deux surfaces coniques.
FIGURE 45 – .
La dimension des surfaces coniques est grande devant les dimensions du barbotin. Aussi,les moments dans le plan normal a l’arbre sont pleinement transmissibles. De meme lesforces sont transmissibles dans toutes les directions. Le modele de liaison adapte est doncune liaison pivot.
On peut ajouter que, par construction, le frottement dans cette liaison est non negligeable(il est meme souhaite). Le torseur transmissible est donc plein : 5 inconnues de liaison et uneinconnue de frottement Cf .
T arbre/barbotin
=I
XYZ
LMCf
(~x, ~y, ~z)
5.3 Influence du jeu sur les actions transmissibles
Pour assurer le bon fonctionnement des guidages, toutes les liaisons sont realisees avecun petit jeu fonctionnel. Selon l’architecture du mecanisme, ce jeu peut conduit a differentschoix de modeles pour l’action transmissible.
page 32

Statique des systemes de solides
Les considerations de ce paragraphe son valables pour la modelisation des actions meca-niques (en statique) et non pour la modelisation cinematique. Beaucoup d’erreurs de mode-lisation proviennent de la confusion entre les objectifs cinematiques et statiques.
5.3.1 Cas d’ecole
On considere figure 46 une liaison par contact cylindre-cylindre (avec jeu comme danstoutes liaisons reelles). Cette liaison assure un guidage en rotation ; elle transmet les forcesdans toutes les directions et, malgre le jeu, elle transmet aussi les moments dans les direc-tions normales a l’axe de l’arbre.
Cette liaison est modelisee, en cinematique comme en statique, par une liaison pivot.
FIGURE 46 – Assemblage 1 : la liaisonpeut transmettre un moment.
FIGURE 47 – Assemblage 2 : la liaison nepeut pas transmettre de moment.
La figure 47 montre maintenant la meme liaison, associee cette fois a un autre guidage parcontact cylindre-cylindre court en D. La presence de cette liaison va modifier la modelisationa adopter pour la premiere liaison...
En effet, la premiere liaison figure 46 est susceptible de transmettre des moments carlorsque l’effort en C est applique, la liaison vient en contact en A et B et la combinaison desdeux forces opposees en A et B cree un moment.
Par contre, la seconde liaison figure 47 ne vient pas en contact en B : le jeu de la liaison enD ne permet pas a l’arbre de venir en butee en A et B en meme temps si bien que la liaisonde gauche n’est pas capable de transmettre un moment !
Le jeu de la liaison autorise un petit rotulage de l’arbre par rapport au bati. Le jeu est,pour une fabrication standard, tres petit (de l’ordre de 75 µm pour un guidage H7g6 dediametre 35 mm). Le rotulage est de l’ordre d’une a deux minutes d’angle (10−3 rad = 3.7′
pour le guidage H7g6 de diametre 35 mm et de longueur 2.d = 70 mm), c’est a dire imper-ceptible a l’œil nu... Pourtant, il est suffisant pour que la liaison soit incapable de transmettreun moment si l’angle de rotulage maxi n’est pas atteint.
La liaison de gauche ne transmet alors que les forces dans toutes les directions et aucunmoment : elle se modelise par une liaison rotule. La liaison de droite autorisant, en plus, latranslation axiale, elle se modelise par une lineaire annulaire.
Si la modelisation de la liaison de gauche par une rotule vous paraıt choquante, c’estcertainement parce que vous etes focalise par la cinematique (le mouvement autorise) :considerez l’action mecanique transmissible par la liaison de gauche.
Cette illustration souligne deux points :– La modelisation n’a rien de systematique : a une meme realite peut correspondre deux
modeles differents.
Marc Derumaux – LLG page 33

Statique des systemes de solides
– Un schema cinematique peut etre different selon s’il est concu pour l’etude du mouve-ment ou des efforts.
5.3.2 Application a l’arbre
Le guidage de l’arbre du guindeau est realise par deux contacts cylindiques ”longs”. Lafigure 48 montre ces deux guidages (celui du bas se fait par l’intermediaire d’un montage deroulement).
Un guidage cylindrique est dit ”long” lorsque la longueur L de guidage est superieur a1.5 fois le diametre d. Sachant que le rotulage α est tel que tanα = j/L, ou j est le jeu, pro-portionnel au diametre, il devient tres petit, ce qui rend la liaison propice pour transmettredes moments.
Un guidage cylindrique est dit ”court” lorsque la longueur L de guidage est inferieurea 0.5 fois le diametre d. Dans ce cas, un moment a transmettre conduirait a des efforts tresimportants en A et B. Ce type de liaison, de rotulage important, convient plutot lorsqu’il n’ya pas de moments a transmettre.
Lorsqu’on observe des guidages “longs” ou “courts”, on peut alors deviner la liaison quele concepteur du mecanisme a cherche a realiser.
FIGURE 48 – Guidage de l’arbre du guindeau par deux contacts cylindriques ”longs”.
Le montage de l’arbre est difficile a modeliser. Si la deformation de l’arbre est faible etle jeu suffisant, chaque liaison ne transmet que des forces : elles se modelisent comme desrotules.
Cependant, si l’effort ~F sur la poupee est important, il convient de verifier par un calculde resistance des materiaux que la deformation de l’arbre ne conduit pas a des rotulagesα1 et α2 superieurs aux rotulages admissibles. Auquel cas, les liaisons vont transmettre desmoments et les modeles appropries seront des pivots.
page 34

Statique des systemes de solides
Dans le cas de deux liaisons pivot en parallele, le modele devient franchement hyper-statique et necessite de tenir compte de la raideur en flexion de l’arbre pour determiner lesefforts.
Le choix d’un montage hyperstatique pour le guindeau apporte des proprietes de rigiditeappreciables pour l’application. Generalement, ce type de montage est couteux et complexecar il impose des contraintes geometriques fortes pour que le systeme soit montable. Un coutimportant des usinages serait totalement inapproprie pour cette application. Mais dans lecas present, le bati est monte en deux parties (sur le pont et sous le pont). Cette particulariteresoud le probleme de montage et permet donc de beneficier des avantages d’un montagehyperstatique sans les inconvenients.
Cet exemple montre que si certaines generalites peuvent etre enoncees en modelisation,chaque cas est a considerer avec attention pour bien cerner les phenomenes locaux et adop-ter un modele representatif du reel.
5.4 Influence du frottement dans les liaisons
Le frottement est partout dans le monde reel. Pourtant, beaucoup de liaisons sont mode-lisees ”sans frottement”.
Dans quel cas convient-il de tenir compte tout de meme du frottement et dans quellemesure le modele ”sans frottement” est-il pertinent ?
5.4.1 Quand tenir compte du frottement
Le frottement dans une liaison complique le modele. Il est donc pris en compte unique-ment dans les cas ou cela est necessaire.
FIGURE 49 – Liaison ponctuelle.
Par exemple dans le cas d’une liaison ponctuelle (figure 49), le torseur statique passe de1 inconnue sans frottement a 3 inconnues avec frottement :
T 2/1
=A
ZA.~z~0
T 2/1
=A
XA.~x+ YA.~y + ZA.~z
~0
Le concepteur est amene a prendre en compte le frottement dans deux cas :
– lorsqu’il est necessaire pour faire apparaıtre le phenomene etudie (par exemple l’etuded’un frein a disques),
– lorsqu’il n’est pas l’objet de l’etude mais que son influence n’est pas negligeable sur lesysteme etudie.
Marc Derumaux – LLG page 35

Statique des systemes de solides
5.4.2 Application au barbotin
Liaison arbre-cone :
Cette liaison est realisee par un contact cylindre-cylindre court + plan. L’ajustement estun H7p6, qui se traduit par un tres fort serrage. Il s’agit donc d’une liaison encastrement parfrottement.
Liaison arbre-barbotin :
Le frottement sur les surfaces coniques assure le couple de freinage. il est essentiel detenir compte du frottement dans ce cas. Une integration des efforts locaux peut permettrede determiner le couple de freinage a partir de l’effort axial exerce par la vis.
Liaison roue et vis sans fin :
Le systeme roue et vis sans fin est, dans cette application, irreversible. C’est-a-dire quesi le moteur est capable d’entraıner la poupee, a l’inverse la poupee soumise au poids dumouillage n’est pas capable d’entraıner le moteur. L’irreversibilite est due au frottementdans le systeme roue et vis sans fin. Pour verifier cette propriete, il faut bien entendu tenircompte du frottement au contact en I .
5.5 Liaisons par elements d’interface – Roulements
5.5.1 Les roulements
Les roulements sont des composants assurant un guidage en rotation (ou parfois entranslation : douilles a billes) a tres faible coefficient de frottement : des billes sont inter-posees entre les elements mobiles pour eviter un frottement solide. La resistance a l’avance-ment est alors une resistance au roulement. Les materiaux utilises (acier cemente trempe)sont tres durs et assurent une resistance au roulement tres faible. Les efforts supportespeuvent etre tres importants, meme pour une grande vitesse de rotation.
Les roulements sont constitues (figures 50 et 51) :
– d’une bague interieure,– d’une bague exterieure,– de billes ou de galets,– d’une cage repartissant les billes ou galets uniformement.
FIGURE 50 – Vue ecorchee d’un roule-ment a billes.
FIGURE 51 – Photographie d’un roule-ment.
page 36

Statique des systemes de solides
On trouve des roulements dans la plupart des systemes mecaniques. Ils sont generalementmontes par paire. Les photographies figures 52 et 53 montrent la platine de rollers ainsi quele montage de roulement guidant chacune des roues.
FIGURE 52 – Les rollers sont equipes deroues montees sur roulements.
FIGURE 53 – Montage de roulementd’une roue de roller.
Ils sont generalement montes par paire car ils supportent mal les moments autour deleur centre (a l’exception de certains roulements comme par exemple ceux assurant la liaisonpivot de la tourelle sur les grues).
Ils admettent, en plus de la rotation principale, un angle de rotulage d’environ 2 minutesd’angle. Ce rotulage, comme dans le cas d’un guidage par contact cylindrique, conduit anegliger les moments transmissibles par chacun des roulements lorsqu’ils sont montes parpaire.
5.5.2 Application au guindeau
La vis ainsi que la roue sont guidees par des montages de roulements.
La roue est guidee par des roulements a billes (figure 50) tandis que la vis est guidee pardes roulements a rouleaux coniques (figure 54 et 55). Les roulements a rouleaux coniquessupportent des efforts plus importants que les roulements a billes, notamment les effortsaxiaux (l’essentiel de l’action de la roue sur la vis).
FIGURE 54 – Vue ecorchee d’un roule-ment conique.
FIGURE 55 – Photographie d’un roule-ment conique.
Marc Derumaux – LLG page 37
Statique des systemes de solides
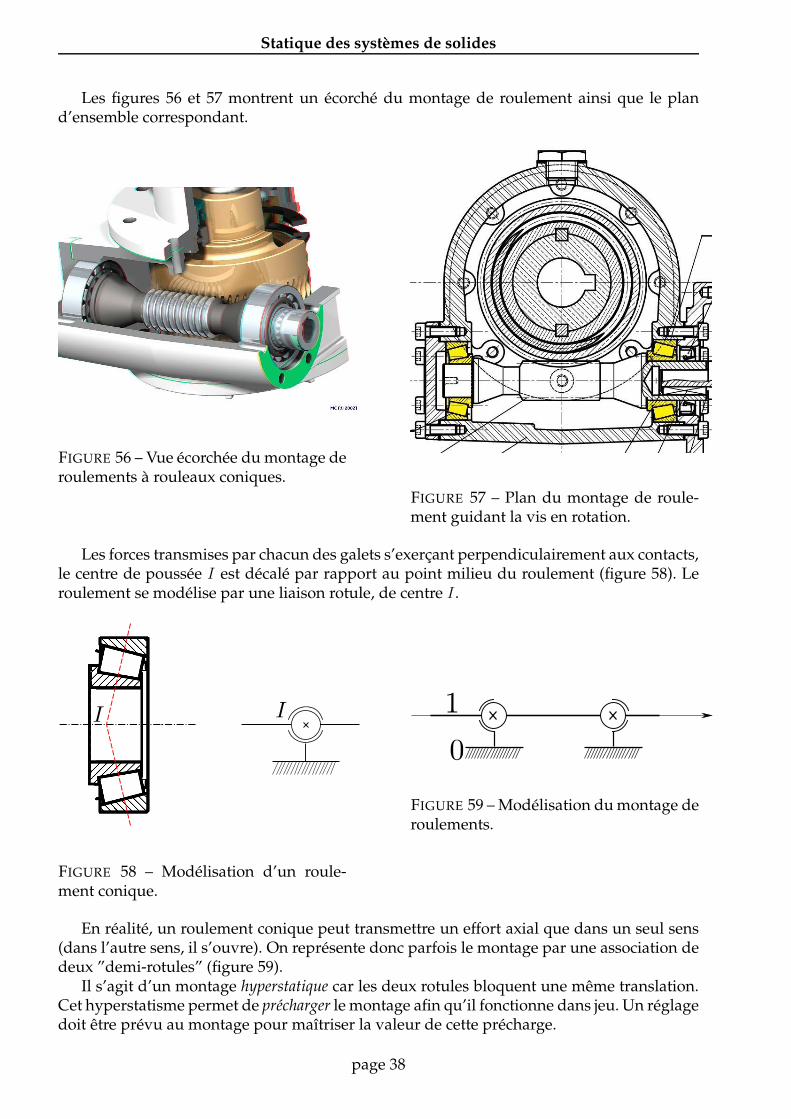
Les figures 56 et 57 montrent un ecorche du montage de roulement ainsi que le pland’ensemble correspondant.
FIGURE 56 – Vue ecorchee du montage deroulements a rouleaux coniques.
FIGURE 57 – Plan du montage de roule-ment guidant la vis en rotation.
Les forces transmises par chacun des galets s’exercant perpendiculairement aux contacts,le centre de poussee I est decale par rapport au point milieu du roulement (figure 58). Leroulement se modelise par une liaison rotule, de centre I .
FIGURE 58 – Modelisation d’un roule-ment conique.
FIGURE 59 – Modelisation du montage deroulements.
En realite, un roulement conique peut transmettre un effort axial que dans un seul sens(dans l’autre sens, il s’ouvre). On represente donc parfois le montage par une association dedeux ”demi-rotules” (figure 59).
Il s’agit d’un montage hyperstatique car les deux rotules bloquent une meme translation.Cet hyperstatisme permet de precharger le montage afin qu’il fonctionne dans jeu. Un reglagedoit etre prevu au montage pour maıtriser la valeur de cette precharge.
page 38
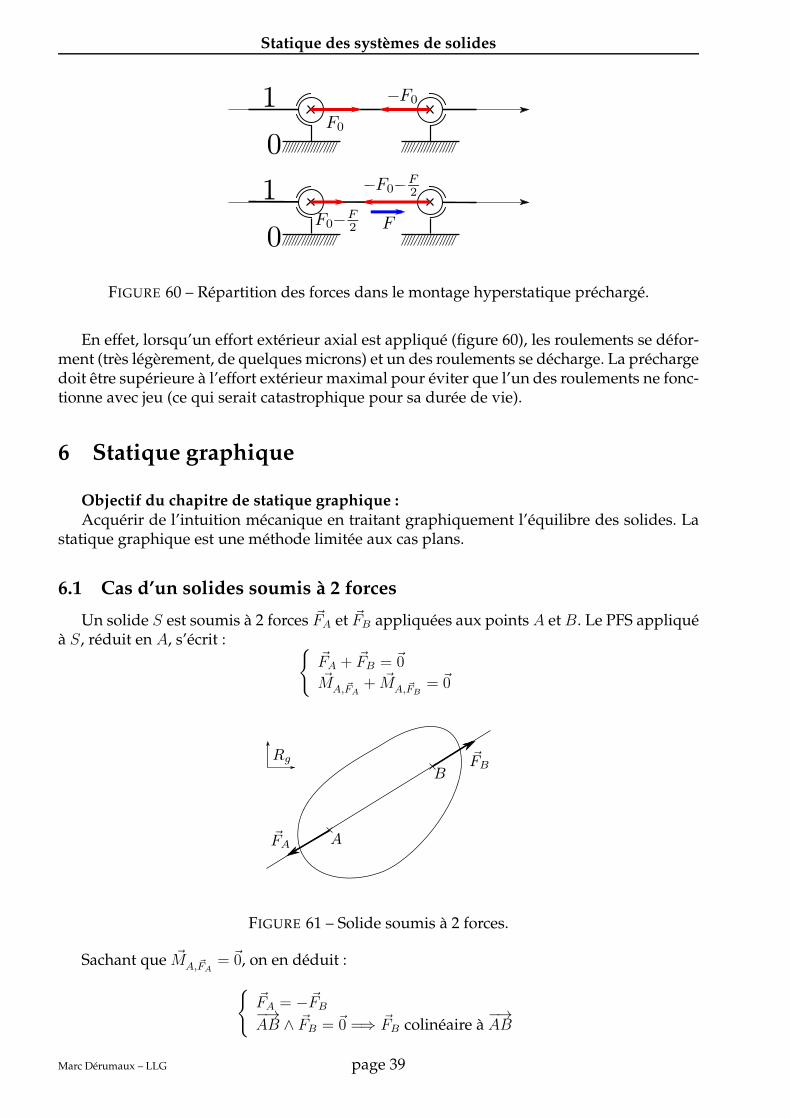
Statique des systemes de solides
FIGURE 60 – Repartition des forces dans le montage hyperstatique precharge.
En effet, lorsqu’un effort exterieur axial est applique (figure 60), les roulements se defor-ment (tres legerement, de quelques microns) et un des roulements se decharge. La prechargedoit etre superieure a l’effort exterieur maximal pour eviter que l’un des roulements ne fonc-tionne avec jeu (ce qui serait catastrophique pour sa duree de vie).
6 Statique graphique
Objectif du chapitre de statique graphique :Acquerir de l’intuition mecanique en traitant graphiquement l’equilibre des solides. La
statique graphique est une methode limitee aux cas plans.
6.1 Cas d’un solides soumis a 2 forces
Un solide S est soumis a 2 forces ~FA et ~FB appliquees aux points A et B. Le PFS appliquea S, reduit en A, s’ecrit :
~FA + ~FB = ~0~MA,~FA
+ ~MA,~FB= ~0
FIGURE 61 – Solide soumis a 2 forces.
Sachant que ~MA,~FA= ~0, on en deduit :
~FA = −~FB−→AB ∧ ~FB = ~0 =⇒ ~FB colineaire a
−→AB
Marc Derumaux – LLG page 39

Statique des systemes de solides
Theoreme : Solide soumis a 2 forcesSi un solide a l’equilibre est soumis a deux forces en A et B, alors celles-ci sont dememe directions (AB), de meme normes et de sens opposes.
6.2 Cas d’un solide soumis a 3 forces non paralleles
Un solide S est soumis a 3 forces ~FA , ~FB et ~FC appliquees en A, B et C. Le PFS appliquea S, reduit en un point quelconque I , s’ecrit :
~FA + ~FB + ~FC = ~0~MI, ~FA
+ ~MI, ~FB+ ~MI, ~FC
= ~0
FIGURE 62 – Solide soumis a 3 forces.FIGURE 63 – Methode de resolution dansle cas d’un solide soumis a 3 forces.
En choisissant I sur le support de ~FA, le moment en I de ~FA est nul : ~MI, ~FA= ~0.
En choisissant I a l’intersection des supports de ~FA et ~FB , les moments en I de ~FB et ~FB
sont nuls : ~MI, ~FA= ~MI, ~FB
= ~0.
L’equation de moments en I s’ecrit alors :~0+~0+ ~MI, ~FC= ~0. I est donc aussi sur le support
de FC si l’equilibre est assure.L’equilibre des moments impose donc aux trois supports d’etre concourants en un point
I (figure 62). L’equilibre des forces s’ecrit ~FA + ~FB + ~FC = ~0 et se traduit graphiquement parune fermeture de trois vecteurs.
Theoreme : Solide soumis a 3 forces non parallelesSi un solide a l’equilibre est soumis a 3 forces non paralleles, alors leurs supportssont concourants en un meme point et les forces sont en dynamique fermee.
Methode :On connait la force ~FA entierement et la direction de ~FB (figure 63).
La concourance des directions permet de determiner la direction de ~FC .Une fois les trois directions connues, et connaissant l’une des forces, la fermeture statique
permet de determiner les normes et les sens des deux autres forces ~FB et ~FC .
page 40