Stabilité F.Rotella I.Zambettakis …©CritèredeNyquist Tracé du lieu de Nyquist de GH(p)...
32
Automatique Stabilité F. Rotella I. Zambettakis [email protected], [email protected] F. Rotella I. Zambettakis Automatique 1
Transcript of Stabilité F.Rotella I.Zambettakis …©CritèredeNyquist Tracé du lieu de Nyquist de GH(p)...
AutomatiqueStabilité
F. Rotella I. Zambettakis
[email protected], [email protected]
F. Rotella I. Zambettakis Automatique 1
Stabilité La réponse fréquentielle
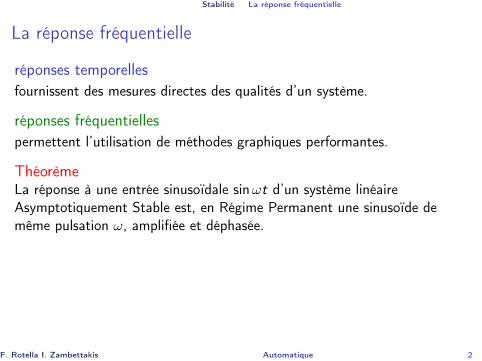
La réponse fréquentielle
réponses temporellesfournissent des mesures directes des qualités d’un système.
réponses fréquentiellespermettent l’utilisation de méthodes graphiques performantes.
ThéorèmeLa réponse à une entrée sinusoïdale sinωt d’un système linéaireAsymptotiquement Stable est, en Régime Permanent une sinusoïde demême pulsation ω, amplifiée et déphasée.
F. Rotella I. Zambettakis Automatique 2

Stabilité La réponse fréquentielle
Réponse fréq. d’un système linéaire-1
F (p) =N(p)
D(p)→
{s(d)(t) + · · ·+ a0s(t) = bne(n)(t) + · · ·+ b0e(t)v(t) = u(t)
e(t) = sinωt =⇒e(t) = e jωt
u(t) = N(jω)e jωt
Résolution des E.Diff. :
s(t) =
{sol.générale ss 2nd membre (C.I)+une sol.part. avec 2nd membre
→ 0 SASe jωt+ϕ
v(t) = SD(jω)e jωt+ϕ
F. Rotella I. Zambettakis Automatique 3

Stabilité La réponse fréquentielle
Réponse fréq. d’un système linéaire-2l’équa.diff. v(t) = u(t) devient donc :
SD(jω)e jωte jϕ = N(jω)e jωt
Se jϕ =N(jω)
D(jω)=⇒
{S = |F (jω)|
ϕ = arg(F (jω))
Système linéaire + S.A.SA =⇒ le régime transitoire tend vers 0en réponse à sinωt, s(t)→ |F (jω)| sin [ωt + arg(F (jω))]
Fonction de transfertF (jω) : fonction de transfert de la variable complexe jω=⇒ Bode, Black, Nyquist
F. Rotella I. Zambettakis Automatique 4
Stabilité Critère de Nyquist
Critère de NyquistC’est un critère de stabilité :I du système G (p) bouclé par retour H(p) ;I fréquentiel ;I graphique ;I utilise le modèle transfert de la boucle ouverte G (p)H(p).
Théorème de Cauchyf (p) fonction de la variable complexe p ayant P pôles et Z zéros àl’intérieur d’une courbe fermée C, en parcourant C dans le sens rétrogradela courbe d’affixe f (C) fait autour de 0 T = P − Z tours dans le sens trigo.
F. Rotella I. Zambettakis Automatique 5
Stabilité Critère de Nyquist
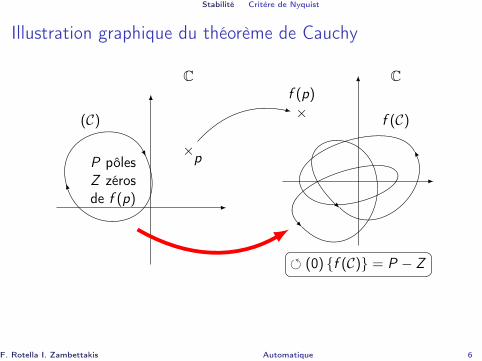
Illustration graphique du théorème de Cauchy
C
p×
×f (p)
C
P pôlesZ zérosde f (p)
(C) f (C)
(0) {f (C)} = P − Z
F. Rotella I. Zambettakis Automatique 6
Stabilité Critère de Nyquist
Application à la stabilitéle transfert en boucle fermée :
FBF (p) =G (p)
1 + G (p)H(p),
sera asymptotiquement stable si les zéros de 1+ GH(p) sont tous dans C−.
On applique le th. de Cauchy à f (p) = 1 + GH(p)
I mais : (0) {1 + GH(C)} = (−1) {GH(C)}I donc, si GH(C) effectue T tours dans le sens trigo autour de −1, et
que par ailleurs GH(p) a P pôles dans C (donc 1 + GH aussi !),I ALORS : 1 + GH(p) a Z = P − T zéros dans C, c’est-à-dire
FBF (p) =G (p)
1 + G (p)H(p)a P − T pôles dans C.
F. Rotella I. Zambettakis Automatique 7
Stabilité Critère de Nyquist
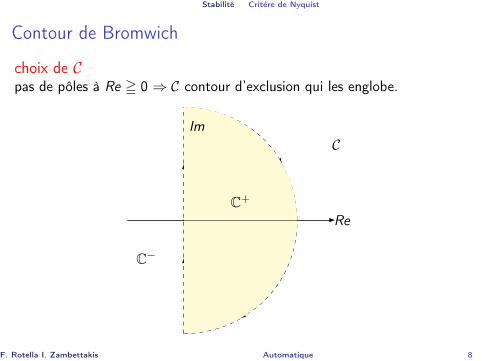
Contour de Bromwich
choix de Cpas de pôles à Re = 0 ⇒ C contour d’exclusion qui les englobe.
C
Im
Reρ
=∞
C−
C+
ImC
F. Rotella I. Zambettakis Automatique 8
Stabilité Critère de Nyquist
Critère de stabilité de Nyquist
DéfinitionGH(C) , où C est le contour de Bromwich, constitue le lieu de Nyquistcomplet de GH(p), soit G (jω)H(jω), ω ∈ ]−∞,+∞[.
condition nécessaire et suffisante de S.A.Le lieu de Nyquist complet de la boucle ouverte GH(C) doit faire autour de−1 un nombre de tours dans le sens trigo identique au nombre de pôlesnon asymptotiquement stables (Re ≥ 0) de GH(p) :
T(−1) = PNAS(BO)
F. Rotella I. Zambettakis Automatique 9
Stabilité Critère de Nyquist
Critère du revers
Cas particulier d’applicationPour les systèmes asymptotiquement stables en boucle ouvertePNAS(BO) = 0, soit :
T(−1) {GH(C)} = 0.
Critère simplifié de NyquistGH(p), asymptotiquement stable, est asymptotiquement stable en bouclefermée si et seulement si le point -1 est laissé à gauche lorsque l’on parcourtle lieu de Nyquist de GH(jω), ω ≥ 0, dans le sens des ω croissants.
ExtensionCette propriété est encore vraie si GH(p) a un pôle nul (intégrateur).
F. Rotella I. Zambettakis Automatique 10
Stabilité Critère de Nyquist
Tracé du lieu de Nyquist de GH(p)
1. Tracer G (jω)H(jω), ω variant de 0 à +∞ : décomposition entransferts élémentaires.
2. Symétrie par rapport à l’axe réel pour ω variant de −∞ à 0.3. Si GH n’a pas de pôle imaginaire pur : courbe fermée.4. Si GH possède un pôle jβ d’ordre n sur l’axe imaginaire :
Principe de fermetureOn contourne le pôle jβ par un demi-cercle infiniment proche
Im
jβρ = ε→ 0
Image d’un contournementPour ω = β− à ω = β+ on obtient :I n demi-cercles de rayon infiniment grands ;I parcourus dans le sens trigonométrique.
Preuve
F. Rotella I. Zambettakis Automatique 11
Stabilité Critère de Nyquist
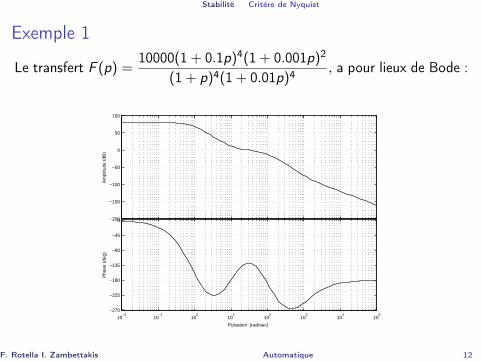
Exemple 1
Le transfert F (p) =10000(1 + 0.1p)4(1 + 0.001p)2
(1 + p)4(1 + 0.01p)4, a pour lieux de Bode :
−200
−150
−100
−50
0
50
100
Am
plitu
de (
dB)
10−2
10−1
100
101
102
103
104
105
−270
−225
−180
−135
−90
−45
0
Pha
se (
deg)
Pulsation (rad/sec)
F. Rotella I. Zambettakis Automatique 12
Stabilité Critère de Nyquist
Exemple 1L’axe réel étant défini par les valeurs de phase :
ϕréel = kπ, k ∈ Z,
on en déduit que le lieu de Nyquist possède 4 intersections avec l’axe réelen :
10000,−0.32,−4,−1514,
lorsque ω croît de 0 à +∞.
D’où viennent ces chiffres ?Soit g la valeur du gain en dB pour une phase de kπ :1. Comme g = 20 log10 |α|, l’intersection avec l’axe réel vaut (en
module) :
|α| = 10g20 .
2. Si k est pair, signe(α) = +1, sinon signe(α) = −1.F. Rotella I. Zambettakis Automatique 13
Stabilité Critère de Nyquist
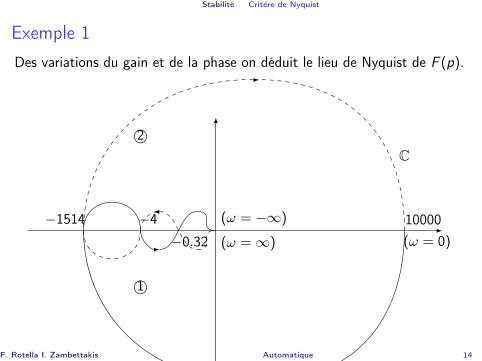
Exemple 1Des variations du gain et de la phase on déduit le lieu de Nyquist de F (p).
C
10000(ω = 0)
−1514
1©
−4−0.32 (ω =∞)
2©
(ω = −∞)
F. Rotella I. Zambettakis Automatique 14
Stabilité Critère de Nyquist
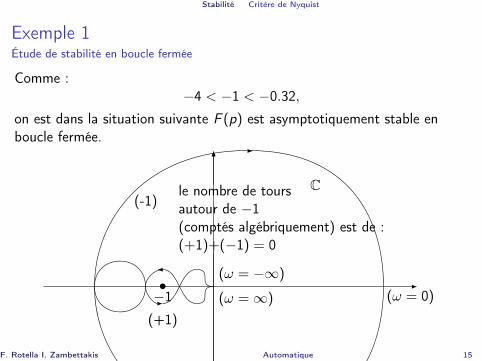
Exemple 1Étude de stabilité en boucle fermée
Comme :−4 < −1 < −0.32,
on est dans la situation suivante F (p) est asymptotiquement stable enboucle fermée.
C
(ω = 0)
(ω = −∞)
(ω =∞)−1•
le nombre de toursautour de −1(comptés algébriquement) est de :(+1)+(−1) = 0
(+1)
(-1)
F. Rotella I. Zambettakis Automatique 15
Stabilité Critère de Nyquist
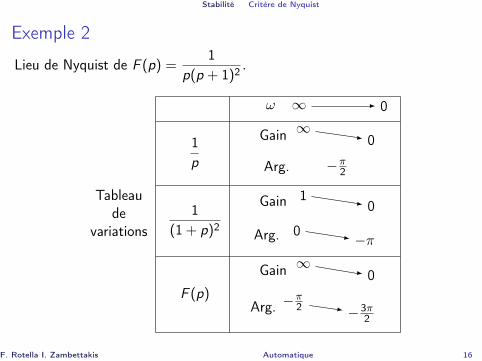
Exemple 2
Lieu de Nyquist de F (p) =1
p(p + 1)2.
Tableaude
variations
ω ∞ 0
1p
Gain ∞ 0
Arg. −π2
1(1 + p)2
Gain 10
Arg. 0 −π
F (p)
Gain ∞ 0
Arg. −π2 −3π
2
F. Rotella I. Zambettakis Automatique 16
Stabilité Critère de Nyquist
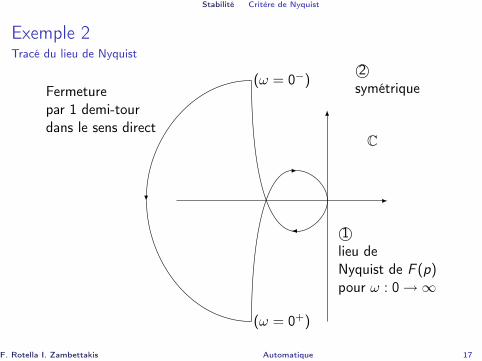
Exemple 2Tracé du lieu de Nyquist
C
1©lieu deNyquist de F (p)pour ω : 0→∞
(ω = 0+)
2©symétrique(ω = 0−)
Fermeturepar 1 demi-tourdans le sens direct
F. Rotella I. Zambettakis Automatique 17

Stabilité Critère de Nyquist
Exemple 2Calcul de l’intersection avec l’axe réel
1. On cherche la pulsation pour laquelle arg(F (jω)) = −π.
2. Or1pdéphase constamment de −π
2.
3. Donc, on cherche ω pour laquelle arg(
1(jω + 1)2
)= −π
2.
Il s’agit de ω−π = 1 rad/s.
4. Pour cette pulsation :∣∣∣∣1p∣∣∣∣ω=1
= 1 et∣∣∣∣ 1(p + 1)2
∣∣∣∣ω=1
=12.
ConclusionL’intersection du lieu de Nyquist avec l’axe réel vaut −1
2.
F. Rotella I. Zambettakis Automatique 18

Stabilité Critère de Nyquist
Exemple 2Étude de stabilité en boucle fermée
Comme :1. Le nombre de pôles non asymptotiquement stables de F (p) est :
1 (1 pôle en zéro) ;
2. Le nombre de tours algébriques autour de -1 est de :
1 (car −1 < −0.5).
ConclusionF (p) est asymptotiquement stable en boucle fermée par retour unitaire.
F. Rotella I. Zambettakis Automatique 20
Stabilité Réglage de k
RemarqueQue se passe-t-il sur le lieu de Nyquist si F (p) est remplacé par kF (p) ?
Interprétation graphiqueLa multiplication par k agit comme une homothétie :
de centre 0, de rapport k .
En conséquencesSi k :I augmente en module, le lieu se dilate ;I diminue en module, le lieu se contracte ;I à module constant, change de signe, on effectue une symétrie par
rapport à 0.
F. Rotella I. Zambettakis Automatique 21
Stabilité Réglage de k
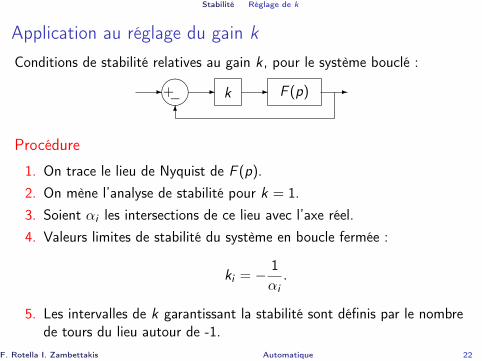
Application au réglage du gain kConditions de stabilité relatives au gain k , pour le système bouclé :
- - - -
6
k F (p)����+−
Procédure
1. On trace le lieu de Nyquist de F (p).2. On mène l’analyse de stabilité pour k = 1.3. Soient αi les intersections de ce lieu avec l’axe réel.4. Valeurs limites de stabilité du système en boucle fermée :
ki = − 1αi.
5. Les intervalles de k garantissant la stabilité sont définis par le nombrede tours du lieu autour de -1.
F. Rotella I. Zambettakis Automatique 22
Stabilité Réglage de k
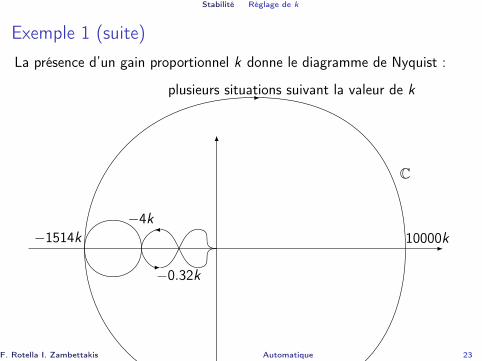
Exemple 1 (suite)La présence d’un gain proportionnel k donne le diagramme de Nyquist :
C
10000k−1514k−4k
−0.32k
plusieurs situations suivant la valeur de k
−0.32k < −1
nombre de tours : -2
système bouclé instable
−1•
−4k < −1 < −0.32k
nombre de tours : 0
système bouclé stable
−1•
−1514k < −1 < −4k
nombre de tours : -2
système bouclé instable
−1•
−1 < −1514k
nombre de tours : 0
système bouclé stable
−1•
10000k < −1
nombre de tours : -1
système bouclé instable
−1•
−1 < 10000k
nombre de tours : 0
système bouclé stable
−1•
F. Rotella I. Zambettakis Automatique 23
Stabilité Réglage de k
Exemple 1 (suite)
Conditions de stabilité en boucle ferméeD’après ce qui précède, pour avoir un système stable en boucle fermée, ilfaut :I −4k < −1 < −0.32k ;I −1 < −1514k ;I −1 < 10000k .
Valeurs de k qui garantissent la stabilité asymptotique en boucleferméeSoient :1. −10−4 < k < 6.6× 10−4.2. 0.25 < k < 3.125.
F. Rotella I. Zambettakis Automatique 24
Stabilité Réglage de k
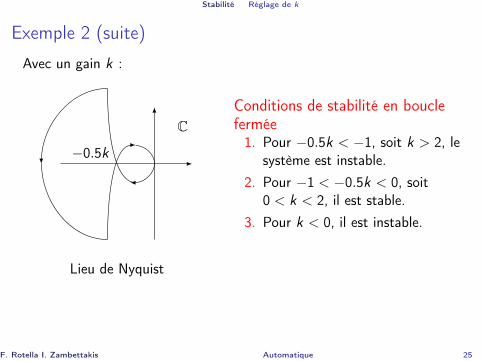
Exemple 2 (suite)
Avec un gain k :
C
−0.5k
−1•
−1•
−1•
Lieu de Nyquist
Conditions de stabilité en bouclefermée1. Pour −0.5k < −1, soit k > 2, le
système est instable.2. Pour −1 < −0.5k < 0, soit
0 < k < 2, il est stable.3. Pour k < 0, il est instable.
F. Rotella I. Zambettakis Automatique 25
Stabilité Critère simplifié
Remarques historiquesI Le critère de stabilité de Nyquist et la démonstration n’ont pas été
proposés par Nyquist.I Nyquist a seulement établi un critère simplifé de stabilité en étudiant
les conditions expérimentales d’instabilité des premiers amplificateursopérationnels sur les lignes téléphoniques :
“On regeneration theory”, 1932.
I La forme complète (et exacte) a été établie par en 1945 (L.A.MacColl).
F. Rotella I. Zambettakis Automatique 26
Stabilité Robustesse
Marges de stabilité
ConstatationPlus le lieu passe loin du point critique -1 plus le système est stable.
Avantage du lieu de NyquistMise en évidence graphique du degré de stabilité par l’éloignement du lieude Nyquist par rapport au point critique.
Indicateurs de robustesse en stabilitéPour qualifier l’éloignement du lieu relativement à -1, on dispose desmarges :I de gain ;I de phase ;I de retard ;I de module.
F. Rotella I. Zambettakis Automatique 27
Stabilité Robustesse
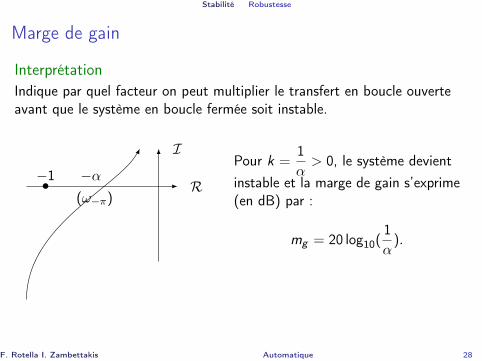
Marge de gain
InterprétationIndique par quel facteur on peut multiplier le transfert en boucle ouverteavant que le système en boucle fermée soit instable.
−1• R
I
−α(ω−π)
Pour k =1α> 0, le système devient
instable et la marge de gain s’exprime(en dB) par :
mg = 20 log10(1α
).
F. Rotella I. Zambettakis Automatique 28
Stabilité Robustesse
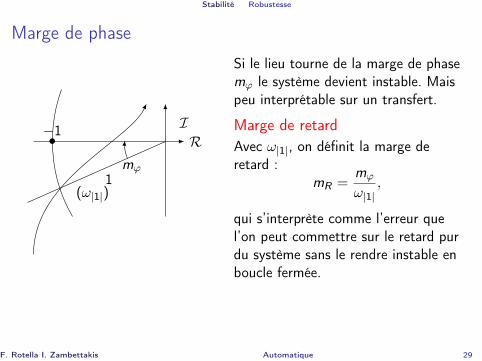
Marge de phase
−1• RI
1mϕ
(ω|1|)
Si le lieu tourne de la marge de phasemϕ le système devient instable. Maispeu interprétable sur un transfert.
Marge de retardAvec ω|1|, on définit la marge deretard :
mR =mϕ
ω|1|,
qui s’interprète comme l’erreur quel’on peut commettre sur le retard purdu système sans le rendre instable enboucle fermée.
F. Rotella I. Zambettakis Automatique 29
Stabilité Robustesse
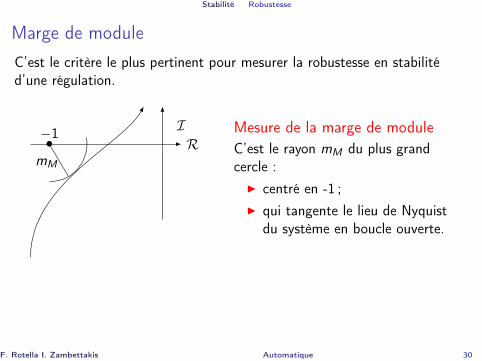
Marge de moduleC’est le critère le plus pertinent pour mesurer la robustesse en stabilitéd’une régulation.
−1• RI
mM
Mesure de la marge de moduleC’est le rayon mM du plus grandcercle :I centré en -1 ;I qui tangente le lieu de Nyquist
du système en boucle ouverte.
F. Rotella I. Zambettakis Automatique 30
Stabilité Robustesse
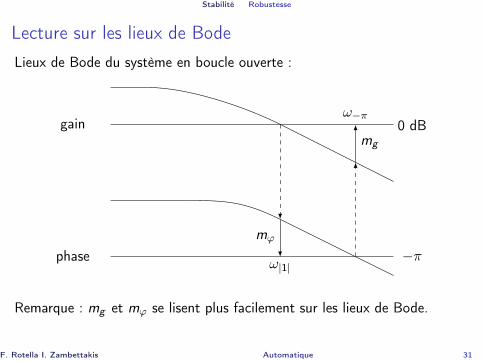
Lecture sur les lieux de BodeLieux de Bode du système en boucle ouverte :
gain
phase −π
0 dBmg
mϕ
ω|1|
ω−π
Remarque : mg et mϕ se lisent plus facilement sur les lieux de Bode.
F. Rotella I. Zambettakis Automatique 31

Stabilité Robustesse
Exercices1. Tracer les lieux de Nyquist des transferts suivants :
1− p(1 + p)(1 + 3p + p2)
,1− 2p + p2
1 + 2p + p2 ,1
p(p + 1)(3p + 2),
1(1 + p)4
,1− 2p
p(1 + p),
11 + p + p2 + p3 .
2. En déduire, dans chaque cas, les conditions de stabilité sur k pour lastructure :
- - - -
6
kN(p)
D(p)����+−
3. Vérifier ces résultats à l’aide :
3.1 du critère de Routh.3.2 d’un logiciel de simulation.
F. Rotella I. Zambettakis Automatique 32
Stabilité Robustesse
Preuve du contournementSoit :
GH(p) =K (p)
(p − jβ)n,
avec 0 < |K (jβ)| <∞.
Soit p = jβ + εe jϕ pour ϕ : −π2→ −3π
2, alors :
GH(p) =K (p)
(εe jϕ)n=
K (p)
εne−jnϕ.
ConclusionLorsque ϕ : −π
2→ −3π
2et ε→ 0 :
I −nϕ :nπ2→ 3nπ
2, soit n 1/2 tours dans le sens trigo
I de rayon |GH(p)| = Kεn→∞. Suite
F. Rotella I. Zambettakis Automatique 33