Spécification Robot Guide Aveugle

of 5
-
Upload
nico21du13 -
Category
Documents
-
view
217 -
download
0
Transcript of Spécification Robot Guide Aveugle
-
7/25/2019 Spcification Robot Guide Aveugle
1/5
Spcification Technique de Besoin d'un Systme Robotis pour le Guidage des Maloyants
SOMMAIRE________
1.Contexte et dfinitions de base: Origine du projet
2.Spcification du Besoin2.1 Fonctionnalits
2.2 Contraintes2.2.1 Dimensions2.2.2 Poids2.2.3 Autonomie2.2.4 Climatique2.2.5 Interface
3. Conclusions
4. Annexes
ABBREVIATIONS_____________
STB : Spcification Technique de BesoinHV : Handicap VisuelPHV : Porteur du Handicap VisuelEP : Environnement ProcheEL : Environnement Lointain3D : Tridimensionnelle / TridimensionnelCB : Canne Blanche
CG : Chien GuideAP : Accompagnateur PersonnelOSR : Outils Standard de RfrenceIHM : Interface Homme/MachineGPS : Global Positioning System
1. Contexte et dfinitions de base: Origine du projet_____________________________________________________
A ce jour, de nombreux PHV, tels de naissance ou par accident ou maladie, ou par le viellissimentnaturel, sont confronts la difficult de se situer dans l'espace et de rperer les ostacles qui lesentourent, aussi bien dans leur environnement proche (que nous appllerons simplement EP) que dans leur
-
7/25/2019 Spcification Robot Guide Aveugle
2/5
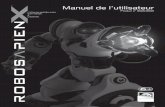
environnement lointain (que nous appellerons EL). Ces deux environnements peuvent tre dfinis comme suit:
Soit une sphre de rayon R et de centre O situ sur le point mdian dusegment reliant
l'arrire des talons du PHV lorsque ce dernier est l'arrt, en position debout, pieds
unis et parallles.
Nous convenons, dans ce document, appeller "Environnement du PhDV" l'espace dlimit par
cette sphre, par le plan du sol (horizontal) et par le plan vertical passant par les talons
du PHV
Pour R 1.5m, on parlera d'Environnement Lointain (EL)
L'image ci-dessous permet de visualiser ces environnements ainsi que le systme derfrence principale prisen compte dans ce document.
IMAGE 1
Indpendemment de la cause de leur HV (rtinien, neurologique, cornen...), les donnes visives quele cerveau doit laborer sont en qualit ou/et quantit infrieure(s) celle(s) ncesss) l'obtentiond'une information suffisante.
Depuis longtemps, des techniques et des stratgies connues permettent cespersonnes de mettre endes solutions de contournement pour une petite partie de leurs problmes de dplacement. Ces techniques decontournement sont rendues encore plus performantes grce des outils trs performant
s (canne blanche,chien guide...).
Nous nous concentrerons sur trois d'entre eux (que nous appellerons Outils Standard de Rfrence, OSR):
la canne blanche (CB)
le chien guide (CG)
l'accompagnement d'une personne (AP)
L'AP est trs performant et permet une intraction complte entre le PHV et sont outil. Nanmoins,il implique qu'une personne soit la disposition complte du PHV. Le cot humain et cnomique est doncparticulirement lev.
Le CG est, des ces trois utils, celui qui semble tre le plus au point. Aprs une priode d'adaptation,le niveau d'intraction entre le CG et le PHV peut se rvler particulirement lev. Rt, parmi les
-
7/25/2019 Spcification Robot Guide Aveugle
3/5
inconvnients, les cots, les soins de l'animal, le fait que l'animal pourrait tre contraint attendre sonmatre pendant des heures (longue journe de travail, cours suivre l'universit...)
La CB reste le plus simple des outil et, peut-tre, celui qui prsente le meilleur ratio entre sacomplxit et les informations qu'il rapporte. Il permet la reconnaissance de l'EP sur environ 1 m devant lePHV et sur une hauteur d'environ 0.50 m du sol. Il ne peut pas guider le PHV mais il prsente l'avantage depouvoir prvenir de manire sonore les personnes environnantes de l'arrive d'une personne en situation dehandicad.
Les caractristiques et pcularits des outils existants cits au $1 sont rsumes danstableauci-dessous:
OUTIL Information apporte AvantagesInconvnients
_______________________________________________________________________________________________________
CB Dtection tridimensionnelle de Simplicit.
Non dtection des obstaclesl'espace devant le PHV, dans un mi-hauteur.
volume dfini par un secteur de Encombrement et poidssphre, de rayon 1.5 m, de centre rduits. Dtecti
des poteaux nondans le coude du porteur, d'un
immdiate.angle d'ouverture horizontal Intraction visuelled'environ 100 (symtrique par et sonore avec
Distance de dtection limite.rapport l'axe vertical reprsent l'environnement.par le corps du PHV) et d'un angle
vertical de 25/30, limit Pas deraitement des
infrieurement par le sol.informations de la part de
l'outil. Le PHV doit laborerENVIRONNEMENTS IDEAUX: Couloirs,
l'information par lui-mme.intrieurs, troittoirs...
ENVIRONNEMENTS HOSTILES: Terrainsouverts / caillouteux / sablonneux,
parcs...
_______________________________________________________________________________________________________
CG Dtection 3D de l'espace devant le Intraction avec leBien que trs adapt pour les
PHV, dans un volume dfini par le PHV. transpots publics,les bus et
-
7/25/2019 Spcification Robot Guide Aveugle
4/5
le champ de vision du CG.les rames de mtros trop pleines
Apport motionnel.pourraient poser problme.
Le CG intragit avec l'EP (et enpartie avec l'EL) et le PHV, en Intraction visuelle
Ncessit de soins et d'unlui apportant les informations et sonore avec l'EP.
environnement sain.ncessaires son dplacement, enle guidant au milieu des obstacles Capacit laborer Les jou
nes de travail outout en se laissant guider. lesinformations et en
scolaires de son matremme temps les pourrai
nt tre trs lourdetransfrer au PHV
pour le chien, contraint desdtection de la attente
extnuantes.circulation routire,des escaliers...).
Cots importants (prise enENVIRONNEMENTS IDEAUX: Extrieurs,
charge par l'tat possible).trottoirs, traverse routires...
ENVIRONNEMENTS HOSTILES: Foule,espaces particulirement exhigus...
________________________________________________________________________________________________________
AP Dtection tridimensionnelle Intraction totaleCuts extrmement importants
de l'espace devant la personne, avec la personne (prise en charge tatique pas
dans un volume dfini par le champ guider.
toujours possible).de vision de l'AP.L'accompagnateur intragit avec le Intraction visuelle
Cration d'un lien de dpendence.PHV en lui apportant les infomrations et sonore.
ncessaires son dplacement, en leguidant au milieu obstacles tout en se Capacit laborer Mise en
danger de l'panouissementlaissant guider. des informations
de la personne handicape.complxes (ou trscomplxes) et les
transfrer au PHV.
ENVIRONNEMENTS IDEAUX: Presque tous.
ENVIRONNEMENTS HOSTILES: Presque aucun.
_________________________________________________________________________________________________________
-
7/25/2019 Spcification Robot Guide Aveugle
5/5
Cependant, l'tat de l'art actuel de la technologie nous permet d'envisager la possibilit deconcevoir un systme lectronique complexe, embarqu sur le PHV et/ou d'un siysme lec-mcanique (robot)l'accompagnat et intraggissant avec lui et l'environnement.
Ces deux systmes pourraient, sparment ou ensemble, intgrer plusieurs fonctinnalits propres auxoutils dcrits ci-dessus et, sans ncessairement tre capables de remplacer intgralemet chacun ou mme unseul d'entre eux, ils pourraient, par leur capacit combiner le fonctionnalits de l'un et de l'autre,se rvler particulirement utiles aux dplacements du PHV et lui permettre de se passequand mme des troisOSR.
2.Spcification du Besoin2.1 Fonctionnalits
2.2 Contraintes2.2.1 Dimensions
Dans l'ventualit que le systme soit embarqu entirement ou partiellnt sur le PHV, sesdimensions d'un systme lectronique embarqu sur le PHV ne doivent pas excder
un paralllipde de150 x 200 x 50 mm.
Pour un systme ou la partie de systme en contact avec le sol, capable, mme partiellement, ou pas,
de se propulser de manire autonome, ses dimnesions, hors interface ventuelle de liaison avec l'utilisateur,
ne doivent pas excder un paralllipde de 350 x 250 x 250 mm.
2.2.2 Poids2.2.3 Autonomie2.2.4 Climatique2.2.5 Interface




![Nouveau critère de séparation aveugle de sources ...arima.inria.fr/012/pdf/Vol.12.pp.1-14.pdf · Séparation aveugle de sources 3 [18]. 2. Modèle de la séparation aveugle de sources](https://static.fdocuments.fr/doc/165x107/5ed13c2202542b27df4b4a33/nouveau-critre-de-sparation-aveugle-de-sources-arimainriafr012pdfvol12pp1-14pdf.jpg)