Modélisation pour Analyses Dynamiques des Réseaux Electriques ...

Réseaux dynamiques sans filAuto-organisation et Tolerance aux fautes
Maria Gradinariu Potop-ButucaruLIP6 – Inria Université Paris 6

Réseau de Capteurs
Applications :
- surveillance civile et militaire- suivi de cible
Déployé dans des milieux hostiles (par avion)

Capteur
La portée
Très petite tailleÉnergie limité (batterie)Portée de communication limitée Peu de mémoireFaible puissance de calculPeu fiable (crash …)Peu coûteux

Réseau de Capteurs
Très grande échelledes milliers de capteurs
Réseau très densecouverture complète
Topologie du réseau dynamique batterie épuisée, pannes fréquentes
Déployé dans des milieux hostiles (par avion)

5Maria Gradinariu
!!
!!
!!
!

6Maria Gradinariu
!!

Infrastructures connectées auto-stabilisantes
• Objectif : Choisir un ensemble de noeuds M tel que :
- chaque noeud du système est dans M ou voisin à M (couverture)- les noeuds dans M peuvent communiquer entre eux (connectivité)
Qualité de service : auto-organisation et tolérance aux fautes

8Maria Gradinariu
Auto-stabilisation
• Introduit par Dijkstra en 1974.• Un système auto-stabilisant (quelque soit son
état initial) converge en un temps fini vers un ensemble d’états qui satisfont sa spécification.
convergence
illég
itim
elégitime Faute(s)
correct correctstabilisation

9Maria Gradinariu
Auto-stabilisation
• Quelques exemples d'algorithmes:– Arbre couvrant– Coloration– Ensemble dominant indépendant

10Maria Gradinariu
Arbre couvrant enraciné
• Parent = le noeud ayant la distance la plus petite vers la racine
1
1
1
3
0
2
1

11Maria Gradinariu
Arbre couvrant enraciné
• Parent = le noeud ayant la distance la plus petite vers la racine
1
1
1
3
0
2
1

12Maria Gradinariu
Arbre couvrant enraciné
• Parent = le noeud ayant la distance la plus petite vers la racine
1
1
1
3
0
2
1

13Maria Gradinariu
Arbre couvrant enraciné
• Parent = le noeud ayant la distance la plus petite vers la racine
9
12
3
2
0
878
5

14Maria Gradinariu
Arbre couvrant enraciné
• Parent = le noeud ayant la distance la plus petite vers la racine
9
12
3
2
0
878
5

15Maria Gradinariu
Arbre couvrant enraciné
• Si racine alors– Dist=0
• Sinon– dist=min_j {dist_j} +1
(j voisin)
9
12
3
2
0
878
5

16Maria Gradinariu
Coloration
• Degré maximal +1 couleurs
• Deux noeuds voisins ont des couleurs différents
12
13
3
2
0
878
5

17Maria Gradinariu
Coloration
• Degré maximal +1 couleurs
• Deux noeuds voisins ont des couleurs différents
12
13
3
2
0
878
5

18Maria Gradinariu
Coloration
• Degré maximal +1 couleurs
• Deux noeuds voisins ont des couleurs différents
12
13
3
2
0
878
5

19Maria Gradinariu
Coloration
• Si même couleur qu'un voisin avec identifiant plus petit alors change couleur en une couleur disponible
12
13
3
2
0
878
5

20Maria Gradinariu
Coloration
• Si même couleur qu'un voisin avec identifiant plus petit alors changer couleur en une couleur disponible
12
13
3
2
0
878
5

21Maria Gradinariu
Ensemble dominant indépendant
• Deux états: « bleu » « rouge »
• Un seul « rouge » par voisinage
• Tous les noeuds rouges font partie de MIS
12
13
3
2
0
878
5

22Maria Gradinariu
Ensemble dominant indépendant
• Deux états: « bleu » « rouge »
• Un seul « rouge » par voisinage
• Tous les noeuds rouges font partie de MIS
12
13
3
2
0
878
5

23Maria Gradinariu
Ensemble dominant indépendant
• Deux états: « bleu » « rouge »
• Un seul « rouge » par voisinage
• Tous les noeuds rouges font partie de MIS
12
13
3
2
0
878
5

24Maria Gradinariu
Ensemble dominant indépendant
• R1: Si même couleur rouge qu'un voisin avec identifiant plus petit alors change couleur en bleu
• R2: Si je suis le plus petit dans le voisinage alors ma couleur passe à rouge
12
13
3
2
0
878
5

25Maria Gradinariu
Ensemble dominant indépendant
• R1: Si même couleur rouge qu'un voisin avec identifiant plus petit alors change couleur en bleu
• R2: Si je suis le plus petit dans le voisinage alors ma couleur passe à rouge
12
13
3
2
0
878
5

26Maria Gradinariu
Auto-stabilisation et réseaux anonymes
• Problèmes de symétrie

27Maria Gradinariu
Auto-stabilisation et réseaux anonymes
• Problèmes de symétrie

28Maria Gradinariu
Auto-stabilisation et réseaux anonymes
• Problèmes de symétrie

29Maria Gradinariu
Auto-stabilisation et réseaux anonymes
• Problèmes de symétrie
• Nombreux résultats d'impossibilité

30Maria Gradinariu
Auto-stabilisation et réseaux anonymes
• Faire des hypothèses sur l'asynchonie du système (le schedule)
• Utiliser les probabilités

31Maria Gradinariu
Auto-stabilisation et réseaux anonymes
• Les probabilités ne sont pas toujours suffisantes
Si « jeton » alors passer le
jeton avec probabilité 1/2

32Maria Gradinariu
Auto-stabilisation et réseaux anonymes
• Les probabilités ne sont pas toujours suffisantes
• Il faut renforcer le système en rajoutant des hypothèses sur l'asynchronie (le schedule)

33Maria Gradinariu
!!

Infrastructures connectées auto-stabilisantes
• Objectif : Choisir un ensemble de noeuds M tel que :
- chaque noeud du système est dans M ou voisin à M (couverture)- les noeuds dans M peuvent communiquer entre eux (connectivité)
Qualité de service : auto-organisation et tolérance aux fautes

Modèle Id uniques. Indicateur (ex. bande passante ,
capacité de stockage, énergie)
Communication via diffusion locale (les byzantins sont moins puissants)

Première solution :Ensemble maximal indépendent

Networknoeuds
« Passive »
« Active »

Algorithme pour noeud iRule 1:
Passive and Candidate(i) turn Active
Rule 2: Active and (not Candidate(i))
turn Passive
Candidate(i) ssi i n'a pas de voisin j Active or i a le meilleur indicateur dans son voisinage

Execution de l'algorithme MIS
p
t
t1 s1
v
s
p – exécute règle 1 (candidat et pas actif)

Exécution de l'algorithme MIS
p
t
t1 s1
v
s
p – a exécuté règle 1 v and s - executent règle 1

Exécution de l'algorithme MIS
p
t
t1 s1
v
s
p – a exécuté règle 1 s - execute règle 2 (v a un indicateur plus fort)

Networknoeuds
« Passive »
« Active »
« Bridge »

Algorithme pour noeud iStep 1:
Passive and BridgeCandidate(i) and not Covered(i) turn Bridge
Step 2: Bridge and (not BridgeCandidate(i) or Covered(i) ) turn Passive
BridgeCandidate(i) ssi i a un voisin j (Active) et le voisinage de i n'est pas inclut dans le voisinage de j Covered(i) ssi i a un voisin j tel que– Le voisinage de i est inclut dans le voisinage de j ou– i et j ont le même voisinage et j a un meilleur indicateur

Execution de l'algorithme CDS
p
t
t1 s1
v
s
t1 – exécute règle 1 (candidat « bridge » et non couvert par un noeud « active »)

Exécution de l'algorithme CDS
p
t
t1 s1
v
s
t1 – a exécuté règle 1 de l'algorithmet – reste « pasive » (son voisinage totallement couvert par t1)s1 – peut exécuter règle 1 de l'algorithme

Exécution de l'algorithme
p
t
t1 s1
v
s
t1 - a exécuté règle 1t - reste « pasive » s1 - a exécuté règle 1s - reste « pasive »

Fautes• Mauvaise initialisation• Corruptions de la mémoire des noeuds• Noeuds et liens défaillants

Correction de fautes
p
t
t1 s1
v
s
t1 change à « passive »

Correction des fautes
p
t
t1 s1
v
s

Faults correction
p
t
t1
s1
v
s
t change en « bridge »

Correction des fautes
p
t
t1 s1
v
s
- t exécute règle 2 parce qu'il est couvert par t1 et corrige son état- t1 exécute règle 1 parce qu'il est un « bridge » et corrige ainsi son état

Etat Stable
p
t
t1 s1
v
s

Complexité de l'algorithme Etats : 3 (2 bits)Complexité en temps : O(f(n)+n) où
O(f(n)) est la compléxité d'un algorithme de MIS

Deuxième solution : Ensemble dominants

Algorithme du noeud iStep 1:
Passive and IndependentNeighbours(i) and not Dominated(i) Active
Step 2: Active and (exists neighbour j, j active and Dominated(i) by j) Passive
Step 3:Passive and the same neighbourhood as each neighbour and i has the maximal goodness Active
IndependentNeighbors(i) ssi i a deux voisins qui ne sont pas des voisins entre eux Dominated(i) par j ssi – Le voisinage de i est inclut dans le voisinage de j ou– i et j ont le même voisinage et j a un meilleur indicateur

Complexité de l'algorithme
Complexité en nombre d'états : 2 (1 bit) Complexité en temps : n pas

Couverture distribuée d’une zone d’impact dans les réseaux
de capteurs

58Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Couverture connexe d’une zone d’impactPour une meilleure gestion de l’énergie, sélectionner un sous-ensemble suffisant de capteurs qui :
Couvrent la zone d’impact (Couverture),Peuvent communiquer entre eux (Connexité).
Problème introduit par Gupta, Das, et Gu, ACM MobiHoc 2003[GDG03].

59Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Points faibles de l’approche de [GDG03]
• Pas auto-stable
• Pas distribuée
• Pas optimal en espace mémoire

60Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives Des solutions
• Notations • 2 solutions de type auto-stabilisant

61Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
PerspectivesCapteur
Zone d’impact
Capteur passif
Capteur actif
Notations
Extérieur
Intérieur Frontière

62Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Solution 1 : En fonction de la distance
Vers le centre
Vers l’extérieur

63Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Principe : à la frontière
Redondant

64Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Principe : à l’intérieur
Plus près du centre

65Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Principe : à l’intérieur
Plus près du centre
Plus près du centre

66Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Principe : capteur inutile
Redondant
Voisins connectés

67Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Principe : finalement

68Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Fautes tolérées
• Mauvaise initialisation
• Corruption de la mémoire
• Crash

69Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Faute
Exemple

70Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Algorithme
Si Extérieur ● alors devenir rouge
Si Frontière et pas Redondant ● alors devenir noir
Si Redondant et Voisins connectés● alors devenir rouge
Si meilleur Intérieur et pas Redondant ● alors devenir noir
Le meilleur Intérieur est le capteur le plus proche du centre parmi les capteurs dans l’intersection de deux capteurs noirs.

71Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Solution 2 : Indépendamment de la distance
Si Extérieur ● alors devenir rouge
Sinon si Redondant et Voisins connectés● alors devenir rouge
Sinon ● alors devenir noir

72Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives Les résultats
• Résultats obtenus par simulation

73Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Plateforme
• Région : ● Zone d’impact : cercle de rayon 40● Grille 25 x 25 capteurs (625)● Distance entre capteur : 4
● Capteur :● Portée de com. : 9● Conf. init. : aléatoire

74Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Résultats
123 capteurs115 capteursTaille moyenne de la
couverture à la stabilisation
57 sec46 secTemps moyen à la stabilisation
Algorithme 2Algorithme 1

75Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
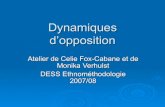
cover stabilization / crash / transient faults / transient faults of only active sensors
0
50
100
150
200
250
300
350
1 10 19 28 37 46 55 64 73 82 91 100 109 118 127 136 145 154 163 172 181 190 199 208 217
tim e
no. a
ctiv
e se
nsor
s
Dependant
Independant
Stabilisation et fautes

76Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Plateforme
• Région : ● Zone d’impact : cercle de rayon 20● 600 capteurs placés aléatoirement
● Capteur :● Portée de com. : aléatoire 5-15● Conf. init. : aléatoire

77Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Résultats
104 capteurs80 capteursTaille moyenne de la
couverture à la stabilisation
190 sec175 secTemps moyen à la stabilisation
Algorithme 2Algorithme 1

78Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
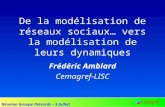
Stabilisation
0
50
100
150
200
250
300
350
0 11 22 33 44 55 66 77 88 99 110
121
132
143
154
165
176
187
198
time
#bla
ck s
enso
rs
DMSCIMSC

79Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives
Conclusion
• Les algorithmes proposés permettent d’économiser de l’énergie;• Ils sont robustes (tolérant aux fautes);• Ils passent à l’échelle;• Ils sont optimaux en espace mémoire (2 couleurs);● Les communications s’effectuent uniquement entre voisins directs.

80Maria Gradinariu
Le modèle
Le problème
Des solutions
Les résultats
Perspectives Problemes ouverts
• Comment réduire la taille de la couverture ?● Etude du rapport voisin de niveau n / taille de la couverture / consommation d’énergie.
• Proposer des solutions tolérants aux fautes pour le problème de couverture de densité k et k-connectée