Rapport de progression: calcul de la puissance nécessaire à la propulsion de différentes...
47
Rapport de progression: calcul de la puissance n´ ecessaire ` a la propulsion de diff´ erentes carrosseries munies de pi` eces en mouvement Louis Gagnon [email protected] sous la supervision de Profs. Marc J. Richard Ph.D., ing. et Benoˆ ıt L´ evesque Ph.D., ing. 24 octobre 2008
description
Licence: http://creativecommons.org/licenses/by-nc-sa/2.5/ca/Ce document rapporte le statut des simulations numériques en cours. Le but de ces simulations est de calculer la puissance requise pour contrer les forces aérodynamiques sur des carrosseries munies de pièces en mouvement visant à réduire cette puissance. Plusieurs approches ont été considérées. Les simulations ont tout d'abord été effectuées en deux dimensions afin d'éviter des complications et un temps de calcul excessif. Ces simulations sont effectuées en régime stationnaire et une analyse instationnaire est faite à partir résultats pour vérifier si des propriétés instationnaires sont présentes dans l'écoulement. Le choix de programme pour le calcul a été fixé sur OpenFOAM (OF), un logiciel libre de droits qui est utilisé dans l'industrie\footnote{Hydro-Québec recours au logiciel OF pour certains de ses calculs d'écoulements.} et dans le monde académique. Le programme OF est spécialisé pour les calculs d'écoulements par la méthode de volumes finis. Des résultats cohérents sont obtenus en utilisant trois modèles de turbulence inclus dans OF: $Realizable-K-\epsilon$, $k-\omega-SST$, et $Spalart-Allmaras$. Une combinaison modèle-paramètres n'a pas encore été cernée pour donner des résultats acceptables de manière consistante. Ce projet est entreprit dans le cadre d'une maîtrise avec mémoire à l'Université Laval, sous la supervision des professeurs Marc J. Richard Ph.D., ing. et Benoît Lévesque Ph.D., ing..
Transcript of Rapport de progression: calcul de la puissance nécessaire à la propulsion de différentes...

Rapport de progression:
calcul de la puissance necessaire a la propulsion
de differentes carrosseries munies de pieces en
mouvement
Louis [email protected]
sous la supervision de
Profs. Marc J. Richard Ph.D., ing. et Benoıt Levesque Ph.D., ing.
24 octobre 2008

Resume
Ce document rapporte le statut des simulations numeriques en cours. Le butde ces simulations est de calculer la puissance requise pour contrer les forcesaerodynamiques sur des carrosseries munies de pieces en mouvement visant areduire cette puissance. Plusieurs approches ont ete considerees. Les simulationsont tout d’abord ete effectuees en deux dimensions afin d’eviter des complica-tions et un temps de calcul excessif. Ces simulations sont effectuees en regimestationnaire et une analyse instationnaire est faite a partir resultats pour verifiersi des proprietes instationnaires sont presentes dans l’ecoulement. Le choix deprogramme pour le calcul a ete fixe sur OpenFOAM (OF), un logiciel libre dedroits qui est utilise dans l’industrie1 et dans le monde academique. Le pro-gramme OF est specialise pour les calculs d’ecoulements par la methode devolumes finis. Des resultats coherents sont obtenus en utilisant trois modeles deturbulence inclus dans OF : Realizable − K − ε, k − ω − SST , et Spalart −Allmaras. Une combinaison modele-parametres n’a pas encore ete cernee pourdonner des resultats acceptables de maniere consistante.
Ce projet est entreprit dans le cadre d’une maıtrise avec memoire a l’Uni-versite Laval, sous la supervision des professeurs Marc J. Richard Ph.D., ing. etBenoıt Levesque Ph.D., ing..
1Hydro-Quebec recours au logiciel OF pour certains de ses calculs d’ecoulements.

Table des matieres
1 Introduction 61.1 Modele du vehicule . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Revue de litterature 92.1 Resultats experimentaux publies . . . . . . . . . . . . . . . . . . 92.2 Resultats numeriques publies . . . . . . . . . . . . . . . . . . . . 102.3 Validite des resultats publies . . . . . . . . . . . . . . . . . . . . 122.4 Approches visant a reduire la traınee . . . . . . . . . . . . . . . . 13
3 Methode 173.1 Variables adimensionnelles . . . . . . . . . . . . . . . . . . . . . . 17
3.1.1 Distance a la paroi . . . . . . . . . . . . . . . . . . . . . . 173.1.2 Nombre de Reynolds . . . . . . . . . . . . . . . . . . . . . 173.1.3 Coefficients de traınee et de portance . . . . . . . . . . . . 183.1.4 Variation de la vitesse a nombre de Reynolds constant . . 18
3.2 Maillage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2.1 Epaisseur variable du maillage adapte a la couche limite . 203.2.2 Mailleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3 Modeles de turbulence . . . . . . . . . . . . . . . . . . . . . . . . 223.4 Conditions aux limites . . . . . . . . . . . . . . . . . . . . . . . . 233.5 Solutions en regimes stationnaires et instationnaires . . . . . . . 233.6 Temps de calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.7 Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Resultats 264.1 Resultats intermediaires . . . . . . . . . . . . . . . . . . . . . . . 26
4.1.1 Modele a angle oblique de 25 . . . . . . . . . . . . . . . 304.1.2 Modele a angle oblique de 35 . . . . . . . . . . . . . . . 31
5 Discussion 325.1 Objectifs atteints . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2 Objectifs vises . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.3 Approche envisagee . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1

6 Conclusion 34
A Conversion de Gmsh vers OF 37
B Calcul de CD dans OF 38
C Details du maillage extremement agrandi 39
D Details du maillage ayant donne les resultats les plus appro-pries 42
2

Nomenclature
δ Epaisseur de la couche limite
ε Taux de dissipation de l’energie cinetique turbulente
µ Viscosite dynamique
ν Viscosite cinematique
ω Taux de dissipation specifique de l’energie cinetique turbulente (ε divisepar un facteur de k)
ρ Densite du fluide
τw Cisaillement a la paroi, eq. 3.3
Aref Aire de la surface de reference du modele, ici choisie comme etant l’airfrontale du modele, pour etre consistant avec [1, 9], et ainsi avec lesautres auteurs se referant au modele Ahmed.
CD Coefficient de traınee sur le modele, eq. 3.5
CL Coefficient de portance sur le modele, eq. 3.6
Fd Force totale de traınee sur le modele
Fl Force totale de portance sur le modele
k Energie cinetique turbulente
L Longueur du modele : 1.044 m
RL Nombre de Reynolds base sur la distance parcourue par le fluide sur laplaque plane. La longueur L du modele Ahmed a ete utilisee en tant quelongueur de la plaque plane. Une minorite d’auteurs ont prefere baserleur nombre de Reynolds sur la hauteur du modele (0.288 m).
U Vecteur de vitesse de l’ecoulement
u∗ Vitesse de friction, eq. 3.2
U∞ Norme de la vitesse du champ non-perturbe
x, y, z Coordonnees cartesiennes ou x represente le sens de l’ecoulement et z lesens de l’envergure
y+ Variable adimensionnelle de distance entre la paroi et la premiere cellule,eq. 3.1
3

Table des figures
1.1 Geometrie utilisee par [1] lors de leurs experiences en soufflerie ;les distances sont en mm . . . . . . . . . . . . . . . . . . . . . . . 8
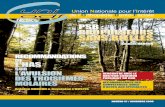
3.1 Maillage utilise pour tester l’implementation d’un domaine beau-coup plus grand que le modele du vehicule, il comprend 477 822cellules. Voir l’annexe C pour les details de ce maillage. . . . . . 20
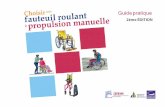
3.2 Distribution de la variable adimensionnelle y+ sur la paroi duvehicule lors d’une simulation stationnaire utilisant le modelede turbulence k − ω − SST . L’endroit ou y+ est maximal avaitanterieurement, en utilisant differents parametres, montre de faiblesvaleurs de y+. L’epaisseur des cellules a cet endroit avait donc etedoublee. Les resultats de cette figure utilisent l’epaisseur doublee. 21
4.1 Maillage utilise pour les simulations. Est montre ici le modele aangle oblique de 25 , qui comporte le meme nombre de cellules etest quasi-identique au modele a angle oblique de 35 . Voir l’annexeD pour le script du maillage. . . . . . . . . . . . . . . . . . . . . 29
4.2 Evolution du coefficient de traınee dans le temps pour une si-mulation en regime instationnaire, RL = 2.8312 ∗ 106, utilisantle modele de turbulence k − ω − SST , angle oblique de 25 etpartant d’une solution stationnaire du meme modele. . . . . . . . 30
4.3 Evolution du coefficient de traınee dans le temps pour une si-mulation en regime instationnaire, RL = 2.8312 ∗ 106, utilisantle modele de turbulence k − ω − SST , angle oblique de 35 etpartant d’une solution stationnaire du meme modele. . . . . . . . 31
5.1 Developpement de l’ecoulement pour deux differents angles. Lesstructures tourbillonnaires tridimensionnelles se retrouvent pourtous les angles obliques. Figures tirees de [11]. . . . . . . . . . . . 33
4

Liste des tableaux
2.1 Dimensions approximatives des domaines utilises par quelquesauteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Classification des methodes de reduction de la traınee . . . . . . 14
3.1 Conditions limites employees sur les diverses parois du modele . 24
5

Chapitre 1
Introduction
En observant la flotte de vehicules qui circulent sur les routes on constate quela grande majorite n’ont pas un profil aerodynamique. En fait, ils prennent plussouvent une forme dictee par plusieurs facteurs dont la securite, la faisabilite, etl’ergonomie. L’experience demontre que dans le cas d’une voiture, la majoritede la resistance aerodynamique vient de la difference de pression entre l’avantet l’arriere du vehicule et que la friction sur les parois du vehicule contribuemoindrement a la resistance aerodynamique. En d’autres mots, le coefficientde pression domine le coefficient de friction. Considerant la voiture comme lesujet de ce projet, il est l’opinion de l’auteur que s’il existe plusieurs methodessimples de modifier la forme generale d’un vehicule afin de reduire sa demandeenergetique il y a aussi plusieurs moyens simples d’ajouter une piece en mouve-ment, voir un aileron, sur un vehicule typique, afin de reduire cette demande. Levehicule peut alors garder sa forme initiale tout en reduisant sa consommationde carburant.
L’idee est d’ultimement parvenir a recapturer de l’energie cinetique induitedans le fluide par le deplacement impose par le passage d’un vehicule avantque cette energie se perde en dissipation visqueuse. Il y a aussi l’idee d’utiliserl’energie de la pression atmospherique lorsqu’elle cherche a remplir le vide quise cree derriere le vehicule afin de, entre autres, recreer ce vide a l’avant duvehicule et en quelque sorte «eviter» le fluide.
Le but de ce projet consiste donc a simuler numeriquement des ajouts depieces sur un modele de vehicule et de produire des resultats qui mettent enevidence quelles methodes et parametres sont plus prometteurs. Par contre, ilest aussi reconnu que la simulation numerique des fluides n’est pas fiable aupoint que les resultats ainsi produits soient immediatement applicables. Donc,l’intention est plutot de donner une direction aux prochains projets, qui raffine-ront les methodes numeriques utilisees ici et entreprendront peut-etre des essaisexperimentaux ou pratiques.
Les defis a surmonter par l’auteur sont de parvenir a utiliser une methode decalcul numerique qui donne des resultats ayant une fiabilite de base, simuler despieces en mouvement qui recapturent l’energie du fluide, et produire des resultats
6

a l’interieur d’un delais prescrit et dans une forme qui sera comprehensible auxfuturs chercheurs qui se pencheront sur la meme question.
1.1 Modele du vehicule
Une geometrie communement appelee le modele Ahmed [1], figure 1.1, aete choisie en tant que modele de depart pour les simulations car elle est cou-ramment utilisee dans la litterature et des resultats experimentaux [1, 16] etnumeriques [5,9,11,13] d’ecoulements sur ce modele ont ete publies par differentsauteurs.
7

Fig. 1.1 – Geometrie utilisee par [1] lors de leurs experiences en soufflerie ; lesdistances sont en mm .
8

Chapitre 2
Revue de litterature
2.1 Resultats experimentaux publies
Selon les resultats experimentaux publies [1], l’ecoulement a l’arriere dumodele Ahmed est caracterise par deux zones de recirculation situees dans unebulle de decollement qui prend place sur la paroi arriere verticale du vehicule.Une autre bulle de decollement accompagnee d’une autre zone de recircula-tion prend place sur l’angle oblique du vehicule lorsqu’il atteint 30 , angle oula traınee atteint sont maximum. [1] rapportent aussi que pres de 85% de latraınee sur le modele provient de la pression.
[16] observent un decollement sur la surface oblique du modele pour unangle de 35 tandis qu’a 25 l’ecoulement semble en contact avec la paroi surla surface oblique a l’exception d’une petite bulle de separation au debut decette surface. Leur ecoulement est represente dans la figure 5.1. Ils notent cesdeux precedentes observations d’apres leurs photographies de couches d’huileappliquees sur le modele lors de leurs experiences en soufflerie. [16] deduisentune zone de decollement lorsqu’il y a absence de sillons dans l’huile et notentaussi une caracteristique bidimensionnelle de l’ecoulement lorsque les sillonsd’huile sur le modele sont tous paralleles.
La paroi oblique du modele presente des structures quasi-bidimensionnellespour de tres petits angles qui deviennent de plus en plus tridimensionnelleslorsque l’angle augmente, et ce jusqu’a un angle critique d’environ 30 . A 35l’ecoulement sur cette paroi redevient bidimensionnel. Cette caracteristique va-riant selon l’angle oblique est due a la formation des tourbillons tridimension-nels sur les «bouts»1 de la paroi arriere du vehicule. Ils interagissent avecl’ecoulement bidimensionnel en place. Les tourbillons se forment sur la paroioblique pour de petits angles et sur la paroi verticale pour des angles ' 30 .
[1] rapportent qu’a l’angle de 30 il suffit d’ajouter une plaque verticale etparallele a l’ecoulement situee 0.025 m en aval du vehicule pour passer d’un
1Terme utilise comme il le serait pour une aile d’avion, par bouts on entend les extremitesde l’envergure.
9

regime a haute traınee (CD = 0.378) a un regime a basse traınee (CD = 0.260).La friction sur la plaque n’est pas calculee dans ce coefficient de traınee maiselle ne pourrait contribuer que minimement au coefficient total et l’idee queles auteurs soulignent ainsi est que cette simple modification2 de l’ecoulemententraıne un changement majeur dans la resistance aerodynamique sur le modelecar les tourbillons tridimensionnels sont detruits et le fluide prend alors unedistribution beaucoup plus bidimensionnelle.
2.2 Resultats numeriques publies
[13] rapportent que dans leurs simulations le coefficient de friction contribuea moins de 10% du coefficient de traınee total : la majorite de la traınee est creeepar la difference de pression entre les parois avant et arriere du vehicule.
[20] ont utilise OF afin de simuler l’ecoulement sur un modele Ahmed tridi-mensionnel et ont obtenu des resultats de traınee et portance concordant avec lalitterature pour la plupart des angles obliques testes. Par contre, ils notent unedifficulte a bien ajuster le programme afin d’obtenir des resultats pertinents. Ilsont choisis d’utiliser un solutionneur d’ecoulements stationnaires. Ils ont utiliseles modeles k − ω − SST et Realizable−K − ε et ils ont legerement modifie lesolutionneur de OF. Leurs calculs ont ete effectues a une vitesse de l’ecoulementexterieur de 40 m/s et dans un domaine de 15 x 1.87 x 1.4 m, comme suggere parERCOFTAC3. Ils ont aussi manipule la condition limite de la paroi representantla chaussee afin d’obtenir une couche limite realiste et pour ce faire ils ont forceune condition de paroi mobile4 en amont du modele et fixe en-dessous et en avaldu modele. Ils mentionnent aussi dans leur presentation que seulement leursmeilleurs resultats sont rapportes.
Le modele k − ε a aussi ete utilise par [2] pour simuler un ecoulement bidi-mensionnel entourant un vehicule5 a corps non profile. Des fonctions de paroisont servies a resoudre le fluide pres de la paroi. [2] rapportent que leur modeledonne certaines discordances par rapport aux resultats experimentaux et attri-buent cela a une faiblesse du modele k − ε.
Par ailleurs, le modele k − ω − SST utilise le modele k − ε pour resoudre lefluide loin des parois, la ou ce dernier est efficace. Le modele k−ω−SST a eteteste [18] et les resultats montrent qu’il predit bien les points de decollement etles proprietes de l’ecoulement pres des parois. De plus, il evite l’accumulationd’energie turbulente dans les zones stagnantes et ne subit pas une influencederaisonnable de l’ecoulement exterieur : problemes typiquement associes au
2Cette modification n’est pas modelisable en simulation bidimensionnelle, simulation quise rapproche vraisemblablement plus de cette configuration a faible traınee.
3European Research Community On Flow, Turbulence, And Combustion. L’association atenu des ateliers sur la simulation du modele Ahmed a plus d’une reprise.
4Condition limite qui n’influence pas la vitesse parallele a la paroi du fluide colle a cettederniere.
5Vehicule plus detaille que le Ahmed. contrairement aux faiblesses reconnues du modelek − ε ils ont obtenu une meilleur prediction des vitesses de l’ecoulement pres de la paroi qu’ala frontiere de la couche limite. Les mesures de vitesses ont ete prises par anemometrie laser.
10

modele k − ε.[19] mentionne que pour une condition de paroi sans glissement il est
preferable d’avoir recours a une condition limite de ω = 10 6νβ1(δy)2
ou δy representela distance entre le le centre de la premiere cellule et la paroi. Le 10 est un mul-tiplicateur determine arbitrairement pour ajuster la valeur de ω a ce quelle esta la paroi puisque ω = 6ν
β1(δy)2au centre de la premiere cellule.
[12] rapporte que le modele k−ω−SST presente une certaine dependancea la densite du maillage pres de la paroi mais qu’elle est tout-de-meme moinsprononcee que pour les modeles k − ε et k − ω. Il note que la prediction ducoefficient de friction (qui influence le CD) est tout-de-meme plus precise pourle modele k−ω−SST . Ses test numeriques sont conduits sur une couche limitede plaque plane a haut Reynolds. Il rapporte aussi que le modele k − ω − SSTse comporte mieux pour des RL ' 106. Il propose de remplacer la constante 10dans l’equation6 de ω a la paroi utilisee par [19] par une constante de 1.5. Ilmontre ensuite que la dependance du coefficient de friction sur la distance entrela paroi et le centre de la premiere cellule est beaucoup attenuee dans les regions0 < y+ < 4 lorsqu’on a recours a la constante 1.5 et que les autres donnees nesont pas influencees. Il ajoute que l’importance de changer ce ratio est baseesur le fait qu’un maillage plus corse pres de la paroi avait tendance, dans lesequations originales de [19], a surestimer la valeur de ω puisque la methode dedifferentiation de ω a recours a l’epaisseur de la premiere cellule.
Une etude numerique bidimensionnelle [5] sur le CD ou differentes surfacesdu modele Ahmed ont ete remplacees par des surfaces poreuses a ete effectueeet a produit des CD concordant, a l’interieur d’une marge raisonnable, avec lesresultats obtenus dans la litterature generale. La simulation a prit place a unRL = 3 ∗ 104 7 et un angle oblique de 30 , angle auquel on s’attend a observerune certaine influence des structures tridimensionnelles. Les auteurs sont aucourant des structures tourbillonnaires tridimensionnelles et mentionnent a cesujet qu’ils souhaitent plutot voir s’il y a possibilite de reduire la taille de labulle de separation qui se forme a l’arriere du modele sur sa ligne de symetrie.Cette etude indique que le nombre de Reynolds semble avoir une faible influencesur le CD en autant que les proprietes turbulentes de l’ecoulement sont bienrepresentees.
Une etude bidimensionnelle d’un modele de voiture similaire au Ahmed aaussi ete conduite par [2] et a donne des resultats satisfaisants.
La plupart des simulations numeriques revues dans la litterature sont ef-fectuees en trois dimensions. Cela est du au fait que le fluide a des proprietestridimensionnelles [11] plutot importantes8 qui influencent le CD du modele.Ces proprietes tridimensionnelles sont en fait la presence de deux tourbillonslongitudinaux qui se forment sur le cotes arrieres du vehicule et qui viennent
6Equation qui donne la valeur ω a la paroi en fonction 1(δy)2
, ou en manipulant les termes,
ω en fonction de( ∂u
∂y)2
y+2 dans le modele k − ω − SST .7Ce RL correspond a une vitesse exterieure de 0.5 m/s .8On constate cette importance lorsqu’on compare les configurations haute traınee et basse
traınee de [1].
11

influencer l’ecoulement bidimensionnel situe sur les parois arrieres du vehicule.Un probleme commun des modeles de turbulence couramment utilises est
leur faible capacite a resoudre les ecoulements decolles. Par exemple, dans lecas du vehicule Ahmed, le modeles etudies dans la litterature rapportent soitun decollement inexistant alors qu’en experimental il y en avait un ou soit undecollement qui ne se recolle pas a la paroi ou en experimental l’ecoulement serecollait.
Plusieurs auteurs utilisent des modeles SGE9 pour leur capacite a resoudreles structures turbulentes avec une precision amelioree sans toutefois necessiterune analyse SND10 qui demande beaucoup plus de temps de calcul. Par contre,les modeles SGE s’appliquent aux calculs tridimensionnels et la precision accruede ces modeles ne serait pas obtenue pour un calcul bidimensionnel.
2.3 Validite des resultats publies
Pour une simulation bidimensionnelle, il a ete demontre par [14]11 que laposition des parois exterieures du domaine de l’ecoulement influencent les forcesappliquees sur le modele par le fluide. Pour obtenir des resultats qui represententla realite les limites du domaine de calcul devraient etre situees suffisamment loindu modele. Leurs simulations d’une aile fixe rapporte qu’une paroi exterieuresituee a moins de 5 fois la longueur de corde de cette aile, les coefficients detraınee et de portance seraient largement exageres. Pour obtenir un CD endedans de 1% de ce que l’on obtient pour un domaine qui tend vers l’infini ondoit utiliser une distance d’au moins 7 fois la longueur de corde de l’aile. Au delad’une distance de 10 cordes, les valeurs atteignent une erreur de moins de 0.2%pour la traınee et 1% pour la portance. Ils mentionnent aussi dans leur analysetheorique que les effets d’une distance reduite en amont du modele seront unetraınee augmentee par la friction et une portance augmentee par la pression.
Les observations de [14] semblent concorder avec les choix de domaines queles auteurs s’etant penches sur le modele Ahmed ont fait. La plupart des es-sais documentes de calculer numeriquement la traınee sur le modele Ahmedne respectent pas cette distance de 10 cordes en amont du vehicule et celadoit etre parce que les effets de friction sont moindres sur le corps Ahmed etqu’une difference n’est pas prise en note dans le CD. Voir le tableau 2.1 pour unapercu des differentes distances utilisees par les auteurs dont plusieurs utilisentun modele de turbulence SGE.
Le resultats experimentaux produits par [1] proviennent d’une experienceou le sol est represente par une plaque plane. Cela est equivalent a eliminer lacouche limite qui se forme entre le vehicule et le sol due a leur difference devitesse et ajouter une couche limite en amont du vehicule ou en pratique il y enaurait pas. Il est possible que la distance entre le modele et le sol immobile soitassez grande pour que la couche limite qui se forme entre le fluide et le vehicule
9Simulation des Grandes Echelles ou LES en anglais.10Simulation Numerique Directe ou DNS en anglais.11Modele Spalart-Allmaras, RL = 1 ∗ 104 .
12

Tab. 2.1 – Dimensions approximatives des domaines utilises par quelques au-teurs
Taille du domaineAuteur Amont Aval Par-dessus Sur les cotes (3D)[9] 2L 6.5L L n.d.[13] 2L 5L 0.85L 0.8L[26] 7L 18L 7.5L n.d.[11] 2L L 3L n.d.[5] 2L L L 0L[4]a L 2.5L L 2.5L[2]b L 4.66L 2.6L 0L
aExperimental.bDifferente geometrie.
soit semblable a celle qui se formerait entre un sol mobile et le modele. Lesautres parois de la soufflerie ne sont pas mobiles mais leur influence est plutotnegligeable vu leur position eloignee.
Par ailleurs, il a ete rapporte [15] que le simple fait d’utiliser une chausseemobile12, modifie la portance et legerement la traınee. [23] rapportent aussi,pour la simulation du modele Ahmed avec une chaussee mobile, la presencede structures tourbillonnaires qui n’avaient pas ete detectees par les auteursprecedents.
[3]13 trouvent une certaine influence de la distance entre la chaussee etun modele semblable au Ahmed sur le coefficient de traınee du modele ; ilsrapportent que l’influence sur le CD est beaucoup plus prononcee dans le casd’un modele a surface rugueuse ; pour un modele a surface lisse, le coefficient detraınee subi une modification d’environ 1 a 5 pourcent en doublant la distanceentre le modele et le pave. Par contre, les distances etudiees par [3] sont de& 0.3L alors que dans le cas du modele Ahmed, la distance entre la chaussee etle vehicule est ≈ 0.05L.
2.4 Approches visant a reduire la traınee
Plusieurs methodes sont etudiees par differents auteurs pour reduire la traıneesur un corps non-profile. [6] les classifies selon trois caracteristiques independantes.Les trois caracteristiques sont representees dans le tableau 2.2 et accompagneesde leur definition.
Plusieurs auteurs [6] ont obtenu des resultats prometteurs en utilisant unemethode passive et tridimensionnelle influencant le sillage de corps bidimen-
12Puisque les experiences sont conduites en soufflerie le vehicule est toujours immobile etdonc une chaussee fixe simule en fait un vehicule etant transporte par un tapis roulant infini.En soufflerie, [15] recourent a un tapis roulant pour simuler la difference de vitesses qu’il doity avoir entre le vehicule et la chaussee.
13RL = 4.82 ∗ 106 .
13

Tab. 2.2 – Classification des methodes de reduction de la traıneetype passive active reactive
modification del’ecoulementsans insertiond’energie
modification del’ecoulementavec insertiond’energie
modification del’ecoulementavec insertiond’energie etadaptation al’ecoulement
dimension bidimensionnelle tridimensionnellecaracteristiquesindependantesde la positionsur l’axed’envergure
caracteristiquesdependantes dela position surl’axed’envergure
zone couche limite sillageinfluencel’ecoulementdans la couchelimite avant ledecollementpour, la plupartdu temps, leretarder
influencel’ecoulementdans le sillagepour en modifierses proprietes
14

sionnels non-profiles. La plupart appliquent un perturbation tout juste apres ledecollement de la couche limite et attenuent ou suppriment ainsi la formationde tourbillons de von Karman. Ces perturbations sont generalement causeespar l’ajout d’une serie de bosses suivant la direction d’envergure sur le corps.Cette methode ne donne pas de resultats concluants pour un corps fortementtridimensionnel tel qu’un vehicule.
Des methodes actives et tridimensionnelles dans le sillage ont aussi donneescertains resultats prometteurs et leur influence est comparable aux methodespassives mentionnees ci-haut. Leur difference est simplement qu’au lieu d’ajouterun obstacle pour modifier le sillage, un soufflage ou une aspiration est applique.Il semble plus difficile d’obtenir une configuration efficace avec une methodeactive. L’utilisation d’un «jet synthetique14» sur le dessus d’un cylindre reduitla traınee a des Reynolds plus eleves (105) et augmente aussi la portance du aufait que le jet est utilise en un seul point ; la reduction de traınee ne semble pasdependante de la frequence du jet.
Pour ce qui est des methodes reactives, il semble qu’elles n’ont ete testeesqu’a tres faibles Reynolds. Les instabilites de l’ecoulement sont plus nombreusesa haut Reynolds et il est donc beaucoup plus complexe de les capter. Lesmethodes utilisees sont des aspirations, soufflages, et vibrations (induites parun haut-parleur) controles par une sonde placee dans le sillage. Encore ici, lesmethodes se concentrent sur l’elimination des tourbillons ce detachant du corps.Il est aussi mentionne que les tourbillons de von Karman semblent exister seule-ment en paires et que la suppression d’un tourbillon au-dessus, par exemple,elimine le tourbillon en dessous du modele.
En general, pour les methodes agissant dans la couche limite, on retrouvebeaucoup de cas de reduction de la traınee par declenchement de la turbu-lence a un Reynolds critique ayant le but de retarder le decollement. La tur-bulence est declenchee soit en introduisant plus de quantite de mouvementdans l’ecoulement ou en provoquant une pre-separation, avec rattachement, etgenerant ainsi une couche limite turbulente qui decollera plus en aval. On ageneralement recours a de la rugosite ou a des fossets a la paroi pour introduirecette quantite de mouvement.
[6] ajoute que les modeles tridimensionnels ne sont pas bien couverts par lalitterature et que ce qui est connu est qu’il est possible d’influencer leur traıneenon seulement en modifiant les proprietes du sillage mais aussi en augmentantleur epaisseur de quantite de mouvement avant le decollement.
Par ailleurs, aucune methode de recaptage d’energie n’est rapportee par[6]. Il mentionne cependant que certains auteurs se demandent si la reductionde traınee optimale est en fait un ecoulement potentiel ou la pression sur lesparois est balancee et ne contribue pas au coefficient de traınee. Dans le cas duvehicule Ahmed, une telle situation equivaudrait a une reduction de la traıneede ≈ 85%. Le fait que des auteurs se posent encore cette question montre qu’ily a evidemment possibilite de reduire les pertes d’energies en «evitant» le pluspossible le fluide ou en recapturant son energie cinetique avant qu’elle ne se
14Jet compose de tourbillons generes a l’aide d’un diaphragme.
15

dissipe.[4] rapportent que la suppression des tourbillons15 tridimensionnels formes
aux bouts du vehicule Ahmed reduisent nettement la traınee et enlevent la plu-part des proprietes tridimensionnelles de l’ecoulement. Ils suppriment ces tour-billons a l’aide d’ailerons places sur les bouts de la paroi oblique du vehicule.Leurs mesures sont faites a un angle oblique de 30 , ce qui correspond approxi-mativement a l’angle de plus forte traınee du vehicule Ahmed. Ils ont teste ensoufflerie l’effet d’ajouter des ailerons a differents endroits sur la partie arrieredu vehicule et notent un certain succes a plusieurs de ces endroits. Ils rapportentles combinaisons d’ailerons les plus efficaces. L’angle optimal de ces ailerons va-rie selon la vitesse de l’ecoulement exterieur et cela confirme les soupcons qu’unepiece mobile, a controle actif, a du moins le potentiel de pouvoir s’ajuster auxconditions auxquelles le vehicule est soumis si la capture d’energie cinetique dufluide est trop complexe pour etre presentement mise en pratique.
15Voir la figure 5.1.
16

Chapitre 3
Methode
3.1 Variables adimensionnelles
3.1.1 Distance a la paroi
La variable de paroi y+ donne la distance adimensionnelle entre le centred’une cellule et la paroi. Elle est calculee selon la formule
y+ = u∗y/ν (3.1)
ou ν = 3.6875∗107 1 et y est la distance entre la paroi et le centre de la premierecellule.
u∗ =√τw/ρ (3.2)
ou ρ = 1.2 .
τw = µ(∂u
∂y) (3.3)
ou u est la vitesse parallele a la paroi et ∂∂y represente le taux de changement
par rapport a la distance a la paroi.
µ = ρν (3.4)
3.1.2 Nombre de Reynolds
Le nombre de Reynolds utilise pour ce projet est base sur une vitesse de40 m/s , une viscosite cinematique de 1.475 ∗ 10−5 m2/s , et une longueur duvehicule de 1.044 m. Donc, RL = 2.8312 ∗ 106. Un modele de fluide newtonienest employe car l’air a une viscosite constante pas rapport aux forces qui lecontraignent.
1Cette valeur gonflee de ν est utilisee pour accommoder une valeur reduite de U = 1 sanstoutefois changer le RL .
17

3.1.3 Coefficients de traınee et de portance
Pour calculer le coefficient de traınee, la formule standard est utilisee
CD =Fd
Aref ∗ 0.5 ∗ ρ ∗ U2∞
(3.5)
Similairement,
CL =Fl
Aref ∗ 0.5 ∗ ρ ∗ U2∞
(3.6)
3.1.4 Variation de la vitesse a nombre de Reynolds constant
Une methode courante en calcul numerique des fluides est d’avoir recours aune vitesse de 1 m/s, une longueur de modele de 1m et d’ajuster la viscositede maniere a obtenir le nombre de Reynolds desire. Ici, la vitesse de 1 m/s aete utilisee en souhaitant augmenter la grandeur des pas de temps du calculinstationnaire et ainsi reduire les erreurs numeriques associees a des pas detemps tres petits. Par contre il faut noter qu’en calcul instationnaire il prendraplus de temps au fluide ralenti pour traverser le domaine de calcul et que donc,la solution ne sera probablement pas atteinte plus rapidement. En considerantque CD = Fd
Aref∗0.5∗ρ∗U2∞
il est important de montrer que le resultat sera le memepour differentes vitesses si RL demeure inchange.
On a CD1 = Fd1Aref∗0.5∗ρ∗12 et CD40 = Fd40
Aref∗0.5∗ρ∗402 ou les indices inferieursrepresentent la vitesse utilisee pour le calcul. ρ et Aref demeurent constants.
Fd1 = δ (p1) ∗Aref + µ1 ∗Aparoi ∗ (∂u
∂y)1 (3.7)
A RL egaux, deux ecoulements ont la meme distribution de vitesses maisajustee proportionnellement a la vitesse exterieure et donc (∂u∂y )40 = 40 ∗ (∂u∂y )1.
Pour garder les RL identiques, µ40 = 40 ∗ µ1 .L’equation de Bernouli est utilisee pour demontrer que p40 = 402 ∗ p1. Elle
s’ecrit U2
2 + gh + pρ = constante. Donc, en suivant une particule de fluide qui
prend un chemin partant de loin en amont du vehicule pour se rendre sur laparoi du vehicule ou sa vitesse devient nulle, en negligeant la gravite et la
viscosite, on peut ecrire pour U = (40, 0, 0) que U2aval
2 + paval
ρ = U2paroi
2 + pparoi
ρ
et donc 402∗ρ2 + 0∗ρ
ρ = 02∗ρ2 + pparoi40∗ρ
ρ et similairement pour U = (1, 0, 0) que12∗ρ
2 + 0 = 0 + pparoi1. En combinant ces deux equations on obtient 402∗ρ2 =
pparoi40 = 402 ∗ pparoi1 .Finalement, on obtient que pour un RL identique, Fd est dependante2 des
valeurs qui composent leRL mais le CD reste identique tant que leRL le demeure2D’apres les equations presentees, Fd40 = 40∗40∗Fd1 . Voir l’equation 3.7 et le paragraphe
qui la suit.
18

aussi. Il est evident que cette demonstration s’applique a tout changement devitesse et non seulement a l’exemple utilise de 1 m/s et 40 m/s . Le raisonnements’applique aussi au CL .
3.2 Maillage
Le maillage s’avere une partie importante de l’analyse car la resolution de cedernier determinera si les structures de petites echelles (presentes surtout presde la paroi) seront prises en compte. Pres de la paroi, la variable adimensionnelley+ est utilisee pour calculer la distance normalisee entre la paroi et le centre dela premiere cellule collee a celle-ci. Selon [25], si on souhaite resoudre les petitesechelles, nous devons avoir un y+ de 1-3 pour un modele Spalart-Allmaras etde moins de 1 pour des modeles a deux equations (tels que k − ω − SST etRealizable − k − ε). Un maillage de type structurel a ete utilise pres de laparoi pour permettre un ajustement efficace du maillage situe dans la couchelimite ou l’on s’attend a avoir, du moins dans la partie plane et non-decollee del’ecoulement, des gradients de vitesse et de pression beaucoup plus prononces endirection normale a la paroi qu’en direction tangentielle. Le maillage orthogonalpres de la paroi permet aussi une manipulation plus efficace de la valeur y+ .Deux choix ont ete etudies pour le maillage en dehors de la couche limite et lemaillage non-structurel a ete retenu pour sa malleabilite accrue en s’eloignant dela paroi. Le maillage non-structurel permet d’avoir un plus grand domaine et dedonner une plus grande resolution de maillage dans le sillage du vehicule tout enayant un resolution beaucoup plus corsee en s’en eloignant des zones raffinees.Il est inutile et inefficace de resoudre finement les echelles de la turbulence atravers tout le domaine.
Il faut aussi considerer que la valeur de y+ (voir la section 3.1) changebeaucoup sur le vehicule Ahmed car le cisaillement a la paroi varie beaucoupentre la zone d’attaque, la zone plane, et les zones de decollement. Il seraitdonc preferable de maintenir la valeur maximale de y+ aux environs des valeurssuggerees par [25] quitte a obtenir une valeur minimale de y+ relativement trespetite.
Un maillage representant un domaine extremement agrandi3 a ete cree etune simulation numerique a ete tentee, voir la figure 3.1. Des resultats station-naires ont ete obtenus dans une marge de temps raisonnable mais les resultatsinstationnaires demandent un trop gros temps de calcul pour qu’il soit envi-sageable d’utiliser un modele comprenant autant de cellules4 pour les calculsfuturs. La prochaine etape sera de modifier le domaine de calcul pour qu’il yait environ 5L en amont, 1.6L au-dessus, et 10L en aval, comme recommande
325L en amont, aval, et au-dessus le vehicule.4Un fort gradient d’agrandissement des cellules du maillage en s’eloignant des parois peut
reduire le nombre de cellules requises. Le maillage du sillage a visiblement ete trop raffine pourle modele extremement agrandi et cela contribue fort probablement a une grande portion dutemps de calcul. Il faut faire attention cependant car un un fort gradient d’agrandissementdonnera de grandes cellules tres minces qui causeront les critere «aspect-ratio» de OF d’etreexcessif ; il doit demeurer / 1000 .
19

par ERCOFTAC [20] ; la distance au-dessus etant choisie petite5 pour concorderavec les methodes utilisees par les differents auteurs et pour eviter un maillagecomprenant trop de cellules, meme si les cellules ajoutees en hauteur sont deplus en plus grandes. Le domaine recommande par ERCOFTAC concorde, dansles grandes lignes, avec les observations de [14]. Les dimensions du domaineseront ajustees s’il s’avere necessaire de faire ainsi.
Fig. 3.1 – Maillage utilise pour tester l’implementation d’un domaine beaucoupplus grand que le modele du vehicule, il comprend 477 822 cellules. Voir l’annexeC pour les details de ce maillage.
Malgre qu’il ait ete rapporte, avec un certain succes, l’usage d’un modele duvehicule suspendu dans l’air [13], pour des calculs de traınee du vehicule Ahmed,il a ete choisi de produire une simulation qui inclut l’influence de la route afind’obtenir des resultats aussi precis que possible. Il est reconnu que le sol, quiest situe tres pres du vehicule a une certaine influence [15] sur les proprietes del’ecoulement aux alentours du vehicule.
3.2.1 Epaisseur variable du maillage adapte a la couchelimite
Il a ete tente de definir une epaisseur variable du maillage pres de la paroi duvehicule pour ainsi eviter une resolution trop fine dans les sections ou la couche
5Le chauffeur d’une voiture ne remarque pas de difference dans la demande energetique deson vehicule lorsqu’il entre dans un tunnel.
20

limite est epaisse et que les gradients de vitesse a la paroi sont plus faibles (doncy+ plus petit). Par contre, la presence de decollement6 et de forte turbulenceempeche la prediction des endroits ou nous pourrions relaxer la resolution dumaillage pres de la paroi. Par exemple, d’apres des simulations anterieures et leshypotheses de couche limite il avait ete juge raisonnable de relaxer la resolutiondu maillage vers la fin de la “plaque plane” representant le dessus du vehiculemais des simulations utilisant le modele k − ω − SST en regime stationnaireont ensuite revele un y+ maximal dans cette zone relaxee (voir la figure 3.2),possiblement du au decollement qui survient a la paroi oblique. L’idee a doncete abandonnee. Il serait toujours possible de reajuster les zones de relaxationdu maillage mais le temps requis depasse le temps de calcul ainsi epargne pourles simulations de ce projet7.
Fig. 3.2 – Distribution de la variable adimensionnelle y+ sur la paroi du vehiculelors d’une simulation stationnaire utilisant le modele de turbulence k − ω −SST . L’endroit ou y+ est maximal avait anterieurement, en utilisant differentsparametres, montre de faibles valeurs de y+. L’epaisseur des cellules a cet endroitavait donc ete doublee. Les resultats de cette figure utilisent l’epaisseur doublee.
6La position estimee du decollement varie d’une simulation a l’autre car les calculsnumeriques en fluides ont une tendance a donner des decollements qui ne correspondent pastout a fait a la realite et dependent du modele utilise. En fait, il ne sera pas possible deverifier l’exactitude du point de decollement pour les simulations comprenant des pieces enmouvement.
7Les zones de decollement changeront a chaque modification de la geometrie du modele etla zone de la couche limite ne peut etre si facilement ajustee car le maillage doit maintenir unnombre constant de cellules dans la zone structurelle ; cette approche sera reconsideree si lesvaleurs tres eparpillees de y+ s’averent etre un probleme.
21

3.2.2 Mailleur
Quelques logiciels libres de droits ont ete consideres pour modeliser la geometrieet generer le maillage du modele. Entre autres : Netgen, Calculix et Salome. Leprogramme retenu est Gmsh. Le choix a ete pose sur ce dernier car il s’installe,s’apprend, et s’utilise assez facilement. Il est aussi mis a jour frequemment etl’auteur est disponible pour repondre au questions par l’entremise d’une liste decourriel. Gmsh est dote d’une interface graphique. La conversion des maillagesse fait plutot aisement8 vers OF pour des maillages en deux et trois dimen-sions, en autant que la taille du fichier de maillage ne soit pas excessive9. Gmsha aussi recours a un algorithme Netgen, qui est generalement apprecie par lesutilisateurs d’OF, pour generer les maillages tridimensionnelles.
3.3 Modeles de turbulence
Differents modeles de turbulence sont incorpores dans le logiciel OF. Lessimulations sont effectuees en ayant recours a un modele de turbulence car lapresence de turbulence influence inevitablement le resultat d’interet a ce projet :le coefficient de traınee du vehicule. Un RL reduit, tel que 3 ∗ 104 [5], n’a pasete retenu pour ainsi concorder avec la plupart des auteurs et ne pas risquerd’obtenir un decollement plus tot qu’il ne devrait du a l’absence de turbulencela ou il y en aurait a haut Reynolds. Au RL utilise il n’est pas possible de simulernumeriquement avec une methode laminaire (absence du modele de turbulence)sans recourir a un maillage beaucoup plus fin qu’il est envisageable d’utiliser. Sion reduisait le RL a une valeur permettant une simulation laminaire, les zonesde decollement changeraient ou disparaitraient et les resultats seraient invalides.
Un modele incompressible avec ρ = 1.2 est utilise car les calculs sont effectuesa un nombre de Mach bien en dessous du regime transsonique et la densite estdonc pratiquement constante a travers l’ecoulement. Vu que nous avons affairea un fluide ou il y a presence de decollement, il est preferable d’avoir recours aun modele que peut bien simuler, dans la limite du possible, le decollement.
Parmi les modeles de turbulence offerts par OF, certains sont mieux adaptesa certaines applications. Un solutionneur pre-code a ete choisi pour les simu-lations afin d’eviter les complications associees a l’integration10 d’un nouveaumodele de turbulence dans le logiciel. Par contre, il est tout-de-meme possiblede modifier un modele afin de raffiner la solution. De plus, plusieurs constantespeuvent etre ajustees pour chaque modele. D’un modele a l’autre et d’un angleoblique a l’autre, les resultats seront plus ou moins en concordance avec lesresultats experimentaux et certaines modifications aux modeles de turbulenceseront tentees si elles semblent prometteuses.
8Voir l’annexe A pour plus d’informations sur la conversion du format Gmsh au formatOF.
9OF eprouve, a premiere vue, des difficultes a traiter des maillages en provenance de Gmshayant plus de deux millions de cellules.
10Il est possible de manipuler les fichiers sources du logiciel et d’incorporer un modele basesur des equations choisies.
22

Pour la plupart des modeles de turbulence, l’etat du fluide pres de la paroipeut etre calcule selon une fonction de paroi ou directement par analyse devolumes finis. Pour ce projet, il serait souhaitable de porter l’analyse de volumesfinis le plus pres des parois pour ainsi obtenir plus de precision dans le calcul. Unecertaine precision du calcul est importante vu que l’intention de ce projet est deremarquer quelles modifications apportees a la carrosserie pourraient avoir desimpacts positifs en termes d’economie d’energie. Par contre, vu les contraintesde temps, il est aussi souhaitable que les calculs soient effectues dans une margede temps de l’ordre d’une heure a une journee, il n’est donc pas possible deresoudre le fluide aussi precisement dans les zones de cisaillement prononce. Lemodele k − ω − SST presentement code dans OF utilise une fonction de paroiet semble decider automatiquement ou la fonction sera utilisee et ou la distancea la paroi est assez grande (en y+) pour ne plus l’utiliser.
Le modele k−ε n’a pas ete utilise pour la presente simulation car il est plutotreconnu comme inefficace dans la zone visqueuse, la ou nous avons l’intentionde resoudre le fluide le plus precisement possible. [21] soulignent aussi que lemodele standard k − ε n’est pas fiable pour les ecoulements a fort cisaillementet les ecoulements decolles.
Deux modeles inclus dans OF, le Realizable − k − ε et le k − ω − SST ,sont bases sur des modeles ameliores du k − ε ( [21] et [18] respectivement) ;le Spalart − Allmaras est base sur [22]. Ces trois modeles seront consideresavant les autres car les deux premiers sont reputes pour leur capacite amelioreea resoudre les ecoulements decolles et le dernier est legerement plus simple ettres repandu pour les simulations aeronautiques.
3.4 Conditions aux limites
Pour bien definir le probleme il faut fournir au programme les conditions li-mites pour les champs de vitesse et de pression a toutes les limites : extremites dudomaine, parois du vehicule, entree, et sortie. Il faut aussi definir les conditionslimites des variables utilisees par le modele turbulent. Dans le cas du modelek−ω−SST les conditions limites de k et ω doivent etre donnees au programme.La table 3.1 fourni un apercu des conditions limites utilisees a present.
Pour les calculs futurs une valeur a la paroi de ω = 1.5 6νβ1(δy)2
sera testee oule facteur 1.5 remplace une valeur de 10, comme mentionne par [12].
3.5 Solutions en regimes stationnaires et insta-tionnaires
Une question qui se pose dans le cadre du projet est si la solution rechercheeaura des proprietes constantes dans le temps. En fait, il est attendu d’obte-nir du moins des proprietes (pression, vitesse) constantes en moyennes car lesresultats experimentaux [11] demontrent une solution constante et symetrique,en moyenne. La methode adoptee est donc de tout d’abord trouver une solution
23

Tab. 3.1 – Conditions limites employees sur les diverses parois du modeleConditions limites
paroi pression vitesse k ωentree ∇ p = 0 U = (1,0,0) k = 0.00325 ω = 0.057 a
sortie p = 0 ∇ U = 0 ∇k = 0 ∇ω = 0mur superieur ∇ p = 0 U = (1,0,0) ∇k = 0 ∇ω = 0mur inferieur ∇ p = 0 U = (1,0,0) ∇k = 0 ∇ω = 0paroi du vehicule ∇ p = 0 U = (0,0,0) ∇k = 0 ∇ω = 0 b
ecoulement initial p = 0 U = (1,0,0) k = 0.00325 ω = 0.057
aLes valeurs de k et ω a l’entree sont choisies semi arbitrairement et leur influence surles resultats est moindre ; ces valeurs representent tout-de-meme un ecoulement entrant ayantun tres faible taux de turbulence. [24] recommande une condition ∇ = 0 a l’entree. Il esta determiner si avec les conditions ∇ = 0 aux parois demandees par OF et la conditionrecommandee par [24] a l’entree il sera possible de generer des valeurs de k et ω necessairesau fonctionnement du modele turbulent. En fait, il s’agit de verifier si le modele k−ω−SSTde OF utilise bien une fonction de paroi et ignore la condition ∇ = 0 dans les parametresfournis au solutionneur.
bLes valeurs de k et ω a la paroi sont donnees a OF comme etant ∇ = 0 car le logiciel arecours a une fonction de paroi et exige cette condition.
convergee en regime stationnaire et d’ensuite faire une analyse instationnaireen demarrant avec les resultats de la solution permanente. De cette maniere,un sillage est deja present au demarrage de la solution instationnaire et laconvergence est obtenue plus rapidement. Il est possible que le resultat ins-tationnaire ne differe pas, ou presque pas, du resultat stationnaire ; ceci est lecas si l’ecoulement etudie est constant dans le temps.
3.6 Temps de calcul
Un facteur limitant dans les simulations effectuees est le temps requis par unordinateur pour effectuer le calcul demande. Ce temps augmente lorsqu’on raf-fine le maillage afin de reduire y+. Donc, il est evident que si des simulations tri-dimensionnelles sont effectuees elle devront recourir a un maillage plus grossierqui utilisera inevitablement des fonctions de paroi pour approximer l’ecoulementpres de la paroi. Le resultats rapportes par [13] utilisent un y+ moyen d’environ80 et allant jusqu’a 400. Ces derniers rapportent aussi differents auteurs qui uti-lisent des y+ 11 moyens de 30 et 200. Donc, un degre de precision tout-de-meme
11Un y+ couvrant la zone «intertide» de 5-30 n’est pas recommande car les structurestourbillonnaires seront partiellement captees par le modele et les resultats perdront de laprecision en comparaison avec les calculs utilisant des y+ de moins de 1-4 ou de plus de30. [25] recommandent un y+ < 1 pour un modele de turbulence a deux equations. Pour lemodele k− ω − SST il semblerait acceptable de se trouver dans la zone «intertide». De plus,en utilisant un modele SGE, il ne semblerait pas y avoir de zone interdite pour la valeur dey+ [8]. Par ailleurs, [10] ne semble pas voir de probleme lie a l’utilisation d’un y+ = 30 enmoyenne et donc inevitablement beaucoup de valeurs dans la zone «intertide» en utilisant unmodele k− ε. Il semblerait que la meilleure technique pour determiner si les resultats obtenus
24

appreciable peut etre obtenu en ayant recours aux lois de parois meme si leszones de decollement sont moins bien resolues.
3.7 Validation
Comme il est mentionne plus haut, le modele initial du vehicule a ete choisien fonction des modeles utilises dans la litterature car des donnees sont dis-ponibles pour valider les resultats qui seront presentes ici. [11] rapportent desresultats de traınee obtenus par differents modeles de turbulence ainsi que parles experiences de [1]. En se basant sur ces resultats nous nous attendons a ob-tenir un coefficient de traınee de 0.23-0.35 pour le modele a angle oblique de 35et de 0.21-0.33 pour un angle oblique de 25 .
Compte tenu qu’il n’est pas possible de determiner, autrement qu’en compa-rant avec les resultats publies, quelles solutions donnent un bon CD et quellesen donnent un errone, il est important de tout d’abord obtenir une methodede calcul robuste avant d’implementer des modeles pour lesquels il n’est paspossible de verifier les resultats par rapport aux articles publies par differentsauteurs.
sont biaises par la valeur de y+ serait de tester l’influence d’une legere modification du y+
sur le cas en question.
25

Chapitre 4
Resultats
4.1 Resultats intermediaires
Plusieurs differents maillages et modeles ont etes simules jusqu’a present.Les resultats les plus en accord avec la litterature ont ete obtenus en utilisantun maillage completement structure avec un modele de turbulence k−ω−SST .Le modele a donne ces resultats acceptables pour un modele Ahmed avec desangles obliques de 25 et 35 .
Ce maillage structurel comporte uniquement des cellules hexaedres1. Il com-prend des plans avant et arriere, qui sont identiques, et portent la conditionlimite «empty» qui est geree par OF pour donner des resultats bidimensionnels.Dans OF, un maillage a tout-de-meme une epaisseur dans la direction «non-dimensionnelle», cette epaisseur doit etre ajustee pour donner les cellules lemoins distordues possibles. Cette propriete de distorsion est appelee le «aspectratio» dans OF et peut etre verifiee avec l’utilitaire «checkMesh». Ainsi, lescoefficients de traınee calcules par OF pour un calcul bidimensionnel prennentcompte de l’aire comme s’il s’agissait d’un calcul tridimensionnel et les valeursappropriees doivent etre fournies a OF dans le fichier «system/controlDict»2.Des maillages semi-structurels ont aussi ete testes ; ils consistent de celluleshexaedres3 dans la zone de couche limite et de cellules pentaedres4 en dehors dela couche limite. L’avantage d’utiliser les cellules pentaedres est une reduction dunombre de cellules necessaires au maillage vu la possibilite de facilement ajouterun gradient de grandeur des cellules en s’eloignant de la paroi du vehicule. Uneautre propriete des maillages est leur non-orthogonalite ; dans le cas etudie, il estinevitable d’avoir un certaine non-orthogonalite vu les courbes du modele. Leprogramme OF a la capacite de gerer ces formes, et a de plus une option qui per-met de raffiner la solution des equations d’elements finis en prenant compte de
1Dans OF, les calculs bidimensionnels sont effectues sur des maillages tridimensionnels quine comprennent qu’une cellule d’epaisseur.
2Voir l’annexe B pour un exemple des commandes utilisees pour calculer la traınee.3Prismes rectangulaires.4Prismes triangulaires.
26

la non-orthogonalite ; cette option s’appelle «nNonOrthogonalCorrectors» quipeut etre ajustee a une valeur de 0 a 4 en pratique et peut theoriquement etreaugmentee sans limite. La «nNonOrthogonalCorrectors» est ajustable dans lefichier «system/fvSolution».
Parmi les bonnes solutions obtenues, a l’angle oblique de 25 , nous obte-nons des solutions permanente et transitoire quasi-identiques et un coefficientde traınee constant de 0.326. Par contre, le coefficient de portance de 3.94 neconcorde pas avec les resultats publie par [5] qui rapportent un coefficient deportance d’environ 0.67. Considerant que l’interet de ce projet est le coefficientde traıne et qu’il est generalement plus difficile de calculer le coefficient de por-tance du modele Ahmed et que la plupart des auteurs ne rapportent pas leursresultats du coefficient de portance il ne sera pas considere comme importantdans le cadre de ce projet. L’effet du coefficient de portance sur la consomma-tion d’essence du vehicule est minime mais il est tout-de-meme important pourmaintenir une bonne stabilite du vehicule.
Pour un maillage quasi-identique5, a un angle oblique de 35 , la solutionstationnaire a converge vers un coefficient de traınee d’environ le double dece qui etait attendu ; par contre, en poursuivant la solution en instationnairea partir des resultats “errones” obtenus par le calcul stationnaire, la solutionconverge vers le coefficient de traınee attendu.
Il a ete constate que le modele k − ω − SST implemente dans OF qui estsupposement base sur [18] ne semble pas concorder entierement avec le modelepropose dans ce dernier document ; quelques constantes utilisees semblent plutotavoir ete tirees de [19]. Des fonctions de parois sont aussi utilisees et il n’est pasclair si ce sont les fonctions de parois recommandees dans [18].
Une propriete interessante du modele de [18] est que les valeurs de y+ a laparoi n’ont pas une aussi grande influence sur les resultats que pour les autresmodeles : une valeur de y+ > 1 par exemple, ne donnerait pas un calcul erronemais plutot simplement moins de precision pres de la paroi. Il reste a verifiersi cela s’applique bel et bien au code implemente dans OF. D’apres les bonnessolutions obtenues avec le k−ω−SST , il semblerait qu’en effet la valeur de y+
puisse varier le long de la paroi et meme atteindre des valeurs qui seraient non-recommandees pour des modeles comme le Spalart-Allmaras sans pour autantobtenir des resultats invalides.
Dans presque toutes les solutions convergees obtenues, on retrouve un profilde vitesse semblable, et cela meme lorsque le coefficient de traınee n’est pascoıncident avec les resultats publies. Ce profil est stationnaire et montre, en sereferant au systeme d’axes pratique ou le vehicule serait en mouvement et laroute immobile, une acceleration du fluide en amont et en aval du vehicule etune deceleration au dessus du vehicule au point d’attaque du toit du vehicule.Les profils de vitesse et pression obtenus montrent une ressemblance assez pro-noncee avec les traits generaux des profils obtenus par les differents auteurs6.
5Toutes les proprietes du maillage demeurent identiques et l’angle oblique est la seulevariable qui change.
6En termes generaux, le modele pousse le fluide qui repose devant lui et un vide creederriere le modele attire le fluide sur le dessus et derriere ce modele.
27

Une couche limite legerement plus mince que pour une plaque plane se formesur les parois planes du vehicule. Pour une plaque plane en ecoulement turbu-lent, l’equation δ
L ∼ 2% [7] donne une couche limite de l’ordre de grandeur de0.02 m sur les parois planes superieures et inferieures du vehicule. Par ailleurs,l’equation δ
L = 0.38 ∗R−1/5L [7] donne une epaisseur plus precise de 0.0203 m et
est en bon accord avec les simulations et les resultats experimentaux. L’epaisseurutilisee pour la zone structurelle du maillage est 0.05 m vu que cette epaisseurse harmonise bien avec la zone de 0.05 m sous le vehicule et ne sera reduite quesi des valeurs reduites de y+ sont necessaires.
28

(a) Domaine complet
(b) Agrandissement de la partie comprenant l’angle oblique du modele afin d’y distinguer lescellules pres de la paroi
Fig. 4.1 – Maillage utilise pour les simulations. Est montre ici le modele a angleoblique de 25 , qui comporte le meme nombre de cellules et est quasi-identiqueau modele a angle oblique de 35 . Voir l’annexe D pour le script du maillage.
29

4.1.1 Modele a angle oblique de 25
Valeursa de y+
min max moy2.10 116.62 51.28
aCalculees au temps ou la simulation a ete arretee : 18.25s .
Fig. 4.2 – Evolution du coefficient de traınee dans le temps pour une simulationen regime instationnaire, RL = 2.8312 ∗ 106, utilisant le modele de turbulencek − ω − SST , angle oblique de 25 et partant d’une solution stationnaire dumeme modele.
30

4.1.2 Modele a angle oblique de 35
Valeursa de y+
min max moy1.90 116.70 51.38
aCalculees au temps ou la simulation a ete arretee : 4.75s .
Fig. 4.3 – Evolution du coefficient de traınee dans le temps pour une simulationen regime instationnaire, RL = 2.8312 ∗ 106, utilisant le modele de turbulencek − ω − SST , angle oblique de 35 et partant d’une solution stationnaire dumeme modele.
31

Chapitre 5
Discussion
Lors d’un calcul bidimensionnel les «roues», qui sont dans le cas du modeleAhmed des piliers, ne sont pas incluses dans la structure analysee ; de plus, lescotes de la voiture ne sont pas modelises et ne contribuent donc ni au coeffi-cient de friction ni au coefficient de traınee du vehicule comme il serait le caslors d’une analyse tridimensionnelle et en pratique. De plus, les structures tour-billonnaires tridimensionnelles ne peuvent etre resolues et il est inevitable quela solution represente moins bien la realite qu’un calcul tridimensionnel d’unememe resolution. Dans le cas d’une aile d’avion, il est plus facile d’ignorer leseffets de bouts vu la grande envergure de l’aile. Dans le cas du vehicule Ahmed,les effets de bouts sont presents et prennent la forme de deux tourbillons lon-gitudinaux qui se developpent a l’extremite arriere du modele et modifient lastructure bidimensionnelle de l’ecoulement. Ces tourbillons sont presents a tousles angles obliques du modele, voir la figure 5.1.
5.1 Objectifs atteints
– Choix du programme de maillage.– Choix du modele servant a valider le calcul : le modele Ahmed.– Revue de litterature.– Essais de plusieurs differents maillages et modeles de turbulence.
5.2 Objectifs vises
– Choisir une combinaison modele-parametres et valider les resultats via untest de sensibilite du maillage.
– Implementer des corps en mouvement sur le modele.– Modeliser un vehicule plus realiste tel que la voiture Alerion Supermileage
de l’Universite Laval et/ou un vehicule plus ordinaire.– Repertorier les resultats obtenus avec differentes pieces en mouvement et
commenter sur l’implementation pratique de telles pieces.
32

(a) Modele a angle oblique de 25 (b) Modele a angle oblique de 35
Fig. 5.1 – Developpement de l’ecoulement pour deux differents angles. Lesstructures tourbillonnaires tridimensionnelles se retrouvent pour tous les anglesobliques. Figures tirees de [11].
– Faire des tests tridimensionnels.
5.3 Approche envisagee
Il serait preferable de bien cerner la condition limite de ω a la paroi car elleest connue [17] pour avoir une grande influence sur les resultats et il n’est pastout-a-fait clair comment OF gere cette variable dans le code k − ω − SST .
Certains modeles permettant de definir un maillage qui se modifie dans letemps sont implementes dans OF, l’objectif serait donc d’implementer cetteapproche dans le solutionneur utilise et de definir differents types de mouvementsde pieces ajoutees au modele pour ainsi observer leur effet sur la traınee.
Les calculs seront tentes en utilisant la vitesse originale de 40 m/s pourainsi reduire toute imprecision venant du fait que la viscosite est ignoree dansl’equation de Bernouli utilisee pour demontrer que le CD demeure constantlorsque le RL le demeure aussi.
Pour obtenir une validation plus en accord avec les resultats experimentaux,il sera tente de reproduire exactement les conditions utilisees par [1], malgrequ’elles representent moins bien la realite, pour ainsi verifier que la methode decalcul utilisee est appropriee. Donc, un sol immobile sera modelise et l’intensitede turbulence de la soufflerie sera utilisee pour determiner les valeurs de k etω a l’entree du domaine. Les distances aux parois seront aussi utilisees tellesque dans [1]. Par la suite, la combinaison modele-parametres choisie pourra etreutilisee avec plus de confidence.
33

Chapitre 6
Conclusion
Il a ete possible d’obtenir plusieurs solutions convergees en ayant recours aplusieurs differents modeles de turbulence, domaines de calcul, resolutions dumaillage, conditions limites, et parametres generaux du solutionneur.
Il semblerait que pour certains cas la solution stationnaire soit la bonnetandis que pour d’autres il faut trouver une solution instationnaire pour obtenirde bons resultats.
Beaucoup d’information a ete accumulee a partir des articles publies pardifferents auteurs qui se sont penches sur le meme modele de vehicule. Il sembleque le modele Ahmed represente encore a ce jour un defi pour la communautescientifique et que les solutionneurs doivent etre bien ajustes pour obtenir debons resultats numeriques.
34

Bibliographie
[1] S. R. Ahmed, G. Ramm, and G. Faltin. Some salient features of the timeaveraged ground vehicle wake. Technical Report TP-840300, Society ofAutomotive Engineers, Warrendale, Pa., 1984.
[2] W. Angelis, D. Drikakis, F. Durst, and W. Khier. Numerical and expe-rimental study of the flow over a two-dimensional car model. Journal ofWind Engineering and Industrial Aerodynamics, 62(1) :57 – 79, 1996.
[3] Jewel B. Barlow, Rui Guterres, and Robert Ranzenbach. Experimentalparametric study of rectangular bodies with radiused edges in ground ef-fect. Journal of Wind Engineering and Industrial Aerodynamics, 89(14-15) :1291–1309, 2001.
[4] Jean-Francois Beaudoin and Jean-Luc Aider. Drag and lift reduction of a3d bluff body using flaps. Experiments in Fluids, 44(4) :491–501, 2008.
[5] Charles-Henri Bruneau, Patrick Gillieron, and Iraj Mortazavi. Flow mani-pulation around the ahmed body with a rear window using passive strate-gies. Comptes Rendus Mecanique, 335(4) :213–218, 2007.
[6] Haecheon Choi, Woo-Pyung Jeon, and Jinsung Kim. Control of flow overa bluff body. Annual Review of Fluid Mechanics, 40 :113 – 139, 2008.
[7] J. Cousteix. Turbulence et couche limite. Cepadues Editions, 1989.
[8] Eugene de Villiers. The Potential of Large Eddy Simulation for the Mo-deling of Wall Bounded Flows. PhD thesis, Imperial College of Science,Technology and Medicine, 2006.
[9] Gerardo Franck, Norberto Nigro, Mario Storti, and Jorge D’Elia. Nume-rical simulation of the ahmed vehicle model near-wake. Technical report,Instituto de Desarrollo Tecnologico para la Industria Quimica, Argentina,2007.
[10] P. Gillieron and F. Chometon. Modelling of stationary 3d separated airflows around an ahmed reference model. In Third International workshopon vortex, pages 173–182. ESAIM, 1999.
[11] Emmanuel Guilmineau. Computational study of flow around a simplifiedcar body. Journal of Wind Engineering and Industrial Aerodynamics, 96(6-7) :1207–1217, 2008.
35

[12] Antti Hellsten. On the solid-wall boundary condition of omega in the k-omega-type turbulence models. Technical Report B-50, Helsinki Universityof Technology, Laboratory of Aerodynamics, 1998.
[13] R J A Howard and M Pourquie. Large eddy simulation of an ahmed refe-rence model. Journal of Turbulence, 3 :012, 2002.
[14] Steve Julien and Vincent Metivier. Effet de la longueur du domaine decalcul. 2007.
[15] M. S. Kim and D. Geropp. Experimental investigation of the ground effecton the flow around some two-dimensional bluff bodies with moving-belttechnique. Journal of Wind Engineering and Industrial Aerodynamics, 74-76 :511–519, 1998.
[16] H. Lienhart, C. Stoots, and S. Becker. Flow and turbulence structuresin the wake of a simplified car model (ahmed model). Technical report,Lehrstuhl fur Stromungsmechanik (LSTM), Universitat Erlangen-Nurn-berg, Cauerstr. 4, 91058 Erlangen, Germany, 2000.
[17] Yvan Maciel. Notes du cours couches limites. Universite Laval, 2008.
[18] Florian Menter and Thomas Esch. Elements of industrial heat transfer pre-dictions. In 16th Brazilian congress of mechanical engineering (COBEM),volume 20, pages 117–127, 2001.
[19] Florian R. Menter. Improved two-equation k-omega turbulence models foraerodynamic flows. NASA STI/Recon Technical Report N, 93 :22809–+,October 1992.
[20] Walter Meile Sebastian Moller, Daniele Suzzi. Investigation of the flowaround the ahmed body using rans and urans with various turbulence mo-dels. In 3rd OpenFOAM Workshop, 2008.
[21] Tsan-Hsing Shih, William W. Liou, Aamir Shabbir, Zhigang Yang, andJiang Zhu. A new k-[epsilon] eddy viscosity model for high reynolds numberturbulent flows. Computers & Fluids, 24(3) :227–238, 1995.
[22] P.R. Spalart and S.R. Allmaras. A one-equation turbulence model foraerodynamic flows. La Recherche Aerospatiale, 1994.
[23] R. Strachan, K. Knowles, and N. Lawson. The vortex structure behind anahmed reference model in the presence of a moving ground plane. Experi-ments in Fluids, 42(5) :659–669, 2007.
[24] B. Mutlu Sumer. Lecture notes on turbulence. Technical University ofDenmark, 2007.
[25] Joe Floyd Thompson, B. K. Soni, and N. P. Weatherill. Handbook of gridgeneration. CRC Press, 1999.
[26] S. Vengadesan and A. Nakayama. Evaluation of les models for flow overbluff body from engineering application perspective. Sadhana - AcademyProceedings in Engineering Sciences, 30(1) :11 – 20, 2005.
36

Annexe A
Conversion de Gmsh versOF
Un script Perl est utilise pour ajuster quelques valeurs du fichier «boun-dary»1 cree par le programme de conversion GmshToFoam afin de le rendreutilisable par OF sans avoir a modifier les donnees a la main a chaque usage.Le script est retranscrit ci-dessous.
$*=1;
open(INPUT,"<$ARGV[0]") or die;
@input_array=<INPUT>;
close(INPUT);
$input_scalar=join("",@input_array);
# Do your substitution here.
$input_scalar =~ s#frontAndBack\n.*{\n.*patch;#frontAndBack\n {\n type empty;#i;
$input_scalar =~ s#defaultFaces\n.*{\n.*\n.*\n.*\n.*}##i;
$number_in = $input_scalar;
$number_in =~ s#\n\n\(\n.*frontAndBack(.|\n)*##i;
$number_in =~ s#(.|\n)*//\n\n##i;
$number_in = $number_in -1;
$input_scalar =~ s#//\n\n\d\n\(\n#//\n\n$number_in\n\(\n#i;
$input_scalar =~ s#fixedWalls\n.*{\n.*patch;#fixedWalls\n {\n type wall;#i;
#$input_scalar =~ s#movingWall\n.*{\n.*patch;#movingWall\n {\n type wall;#i;
open(OUTPUT,">$ARGV[0]") or die;
print(OUTPUT $input_scalar);
close(OUTPUT);
1Fichier determinant les conditions limites du maillage utilise par OF.
37

Annexe B
Calcul de CD dans OF
Portion du fichier «system/controlDict»1 concernant le coefficient de traınee.Ici, rhoInf represente la densite du fluide, dragDir la direction dans laquelle oncalcule la traınee, magUInf la norme de U loin des parois, lRef la longueurreference (L), et Aref l’aire de reference (aire frontale projetee dans le plan y-z).
forceCoeffs
{
type forceCoeffs;
functionObjectLibs ("libforces.so");
patches (fixedWalls);
rhoInf 1.2;
CofR (0 0 0);
liftDir (0 1 0);
dragDir (1 0 0);
pitchAxis (0 0 0);
magUInf 1;
lRef 1.044;
Aref 0.00288;
}
1Fichier determinant les parametres generaux du solutionneur.
38

Annexe C
Details du maillageextremement agrandi
Les resultats obtenus avec le maillage au domaine extremement agrandi nepermettent pas de verifier l’amelioration en termes de precision du coefficient detraınee car de bons resultats n’ont pas pu etre obtenus, ceci n’est pas cause parle maillage agrandi mais plutot par l’absence d’une combinaison de parametresqui donne des resultats consistants ; le travail en cours consiste a trouver cettecombinaison.
Ci-dessous est copie le fichier de definition de ce maillage en langage Gmsh.//******************Definitions***************************
// slant angle:
angle=35*Pi/180;
//nombre de cellules en normales de la paroi sur CL
cellu = 150;
celluP = 1.02; //67 & 1.04 --> Yplus ~ 2 (deltaT"y" premiere cell=1.9501e-05)(reajuste selon ces donnees pour donner y+_max=~1 a Re=~3.5e4 ou Re=~xe7)
//epaisseur (doit correspondre a la distance entre le vehicule et le sol
thic = 0.05;
//char length
cl=0.01;
//char length for BL
clb=0.01/4;
//nbre de points cercles avant
ceav=240;
//nbre de points plat avant
plav = 120;
//nbre de points angle et plat arrieres
anga=280;
//nbre de points ligne sous vehicule
lbas = 468;
lbasB = 0.55;
//nbre de points ligne dessus vehicule
ltop = 400;
ltopB = 0.2;
//************start of 2D car definition************
Point(1) = {0,0,0,0.01};
Point(2)={-0.1,-0.1,0,cl};
Point(3)={-0.1,-0.188,0,cl};
Point(4)={0,-0.288,0,cl};
39

Point(5)={0.944,-0.288,0,cl};
Point(6)={0.697+0.247-0.222*Cos(angle),0,0,cl};
Point(7)={0.944,-0.288+0.041+0.247-0.222*Sin(angle),0,cl};
Point(8)={0,-0.1,0,cl};
Point(9)={0,-0.188,0,cl};
Line(1) = {1, 6};
Line(2) = {6, 7};
Line(3) = {7, 5};
Line(4) = {5, 4};
Line(5) = {2, 3};
Circle(6) = {1, 8, 2};
Circle(7) = {3, 9, 4};
//************end of 2D car definition************
//************start BL def.***********
Point(10)={0,thic,0,clb};
Point(11)={-0.1-thic,-0.1,0,clb};
Point (12)={-0.1-thic,-0.188,0,clb};
Point(13) = {0-thic*1.5,-(0.288+thic),0,clb};
//adding thic to y value below and *2 on char. length
Point (14) = {0.697+0.247-0.222*Cos(angle)+thic*Sin(angle/2),thic,0,2*clb};
Point (15) = {0.944+thic,-0.222*Sin(angle)+thic*Sin((Pi/2-angle)/2),0,clb};
Point(16) = {0.944+thic,-0.338,0,clb};
Line(8) = {10, 14};
Line(9) = {14, 15};
Line(10) = {15, 16};
Line(11) = {16, 13};
Line(12) = {11, 12};
Line(13) = {13, 4};
Line(14) = {5, 16};
Line(15) = {7, 15};
Line(16) = {6, 14};
Line(17) = {10, 1};
Line(18) = {11, 2};
Line(19) = {12, 3};
Line(20) = {12, 13};
Circle(21) = {10, 8, 11};
Line Loop(22) = {9, -15, -2, 16};
Ruled Surface(23) = {22};
Line Loop(24) = {1, 16, -8, 17};
Ruled Surface(25) = {24};
Line Loop(26) = {6, -18, -21, 17};
Ruled Surface(27) = {26};
Line Loop(28) = {5, -19, -12, 18};
Ruled Surface(29) = {28};
Line Loop(30) = {7, -13, -20, 19};
Ruled Surface(31) = {30};
Line Loop(32) = {4, -13, -11, -14};
Ruled Surface(33) = {32};
Line Loop(34) = {3, 14, -10, -15};
Ruled Surface(35) = {34};
Transfinite Line {14,15,16}=cellu Using Progression celluP;
Transfinite Line {12,5}=plav;
Transfinite Line {7,20,6,21}=ceav;
Transfinite Line {3,10,9,2}=anga;
Transfinite Line {13,17,18,19}=cellu Using Progression 1/celluP;
Transfinite Line {4,11}=lbas Using Bump lbasB;
Transfinite Line {8,1}=ltop Using Bump ltopB;
Transfinite Surface {23}={7,15,14,6};
Transfinite Surface {25}={1,10,14,6};
Transfinite Surface {27}={1,10,11,2};
Transfinite Surface {29}={11,2,12,3};
Transfinite Surface {31}={3,12,13,4};
Transfinite Surface {33}={13,4,5,16};
Transfinite Surface {35}={5,16,7,15};
Recombine Surface {23,25,27,29,31,33,35};
//************end of BL definition************
//************start of unstruct BL definition************
Point(17) = {0.1,0.5,0,cl};
Point(18) = {1.2,-0.338,0,cl};
Point (19)={0.994+0.2,-0.247,0,cl};
Point(20) = {0.944-0.222*Cos(angle)+0.05*Sin(angle),0.05*Cos(angle)+0.2,0,cl};
Point(21) = {0.944+0.05*Sin(angle)+0.2,-0.222*Sin(angle)+0.05*Cos(angle),0,cl};
Point(22) = {-0.2, 0.3, 0, cl};
Point(23) = {-0.3, 0.1, 0, cl};
40

Point(24) = {-0.3, -0.1, 0, cl};
Point(25) = {-0.3, -0.338, 0, cl};
Point(26) = {0.6,0.5,0,cl};
Point(27) = {(0.944-0.222*Cos(angle)+0.05*Sin(angle)+0.944+0.05*Sin(angle)+0.2)/2,(0.05*Cos(angle)+0.2-0.222*Sin(angle)+0.05*Cos(angle))/2,0,cl};
Line(36) = {16, 18};
Line(37) = {18, 19};
Line(38) = {19, 21};
Line(39) = {21, 27};
Line(40) = {27, 20};
Line(41) = {20, 26};
Line(42) = {26, 17};
Line(43) = {17, 22};
Line(44) = {22, 23};
Line(45) = {23, 24};
Line(46) = {24, 25};
Line(47) = {25, 13};
Line Loop(48) = {36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, -20, -12, -21, 8, 9, 10};
Plane Surface(49) = {48};
//************end of unstruct BL definition************
//************start of unstruct wake definition************
Point(28) = {25, 1.5, 0, cl*10};
Point(29) = {2,0.5,0,cl};
Point(30) = {2.5,0.5,0,cl};
Point(31) = {3.0,0.5,0,cl};
Point(32) = {1.1,0.5,0,cl};
Point(33) = {25,-0.338,0,cl*10};
Line(50) = {18, 33};
Line(51) = {33, 28};
Line(52) = {28, 31};
Line(53) = {31, 30};
Line(54) = {30, 29};
Line(55) = {29, 32};
Line(56) = {32, 20};
Line Loop(57) = {51, 52, 53, 54, 55, 56, -40, -39, -38, -37, 50};
Plane Surface(58) = {57};
//************end of unstruct wake definition************
//************start of outter box definition************
Point(1313) = {-25,-0.338,0,2};
Point(1414) = {-25,25,0,2};
Point(1515) = {25,25,0,2};
Line(59) = {28, 1515};
Line(60) = {1515, 1414};
Line(61) = {1414, 1313};
Line(62) = {1313, 25};
Line Loop(63) = {62, -46, -45, -44, -43, -42, -41, -56, -55, -54, -53, -52, 59, 60, 61};
Plane Surface(64) = {63};
//************end of outter box definition************
Extrude {0, 0, 0.01} {
Surface{29, 31, 27, 25, 33, 23, 35, 49, 58, 64};
Layers{1};
Recombine;
}
Physical Surface("frontAndBack") = {444, 64, 367, 58, 310, 49, 218, 205, 35, 196, 23, 152, 25, 130, 27, 86, 29, 108, 31, 174, 33};
Physical Surface("fixedWalls") = {139, 191, 205, 161, 95, 73, 117};
Physical Surface("movingWall") = {169, 285, 241, 366, 387, 439};
Physical Surface("inlet") = {443};
Physical Surface("outlet") = {435, 326};
Physical Volume(445) = {1, 2, 3, 4, 5, 6, 7, 8, 9, 10};
41

Annexe D
Details du maillage ayantdonne les resultats les plusappropries
Les resultats obtenus avec le maillage completement structurel ne sont pasencore assez consistants pour le cerner comme le maillage recherche et des mo-difications sont encore a apporter pour respecter le plus de contraintes possiblestelles que la taille du domaine de calcul, le nombre d’elements, et le raffinementaux parois.
Ci-dessous est copie le fichier de definition de ce maillage en langage Gmsh.
//******************Definitions***************************
// slant angle:
angle=25*Pi/180;
//nombre de cellules en normales de la paroi sur CL
cellu = 36;
celluP = 1.03;
//epaisseur (doit correspondre a la distance entre le vehicule et le sol
thic = 0.05;
//char length
cl=0.01;
//char length for BL
clb=0.01/4;
//nbre de points cercles avant
ceav=120;
//nbre de points plat avant
plav = 60;
//nbre de points angle arriere
anga=140;
//nbre de points ligne sous vehicule
lbas = 234;
lbasB = 0.55;
//nbre de points ligne dessus vehicule
ltop = 200;
ltopB = 0.2;
//nbre de points boite exterieure
obox=130;
oboxP=1.03;
42

//************start of 2D car definition************
Point(1) = {0,0,0,0.01};
Point(2)={-0.1,-0.1,0,cl};
Point(3)={-0.1,-0.188,0,cl};
Point(4)={0,-0.288,0,cl};
Point(5)={0.944,-0.288,0,cl};
Point(6)={0.697+0.247-0.222*Cos(angle),0,0,cl};
Point(7)={0.944,-0.288+0.041+0.247-0.222*Sin(angle),0,cl};
Point(8)={0,-0.1,0,cl};
Point(9)={0,-0.188,0,cl};
Line(1) = {1, 6};
Line(2) = {6, 7};
Line(3) = {7, 5};
Line(4) = {5, 4};
Line(5) = {2, 3};
Circle(6) = {1, 8, 2};
Circle(7) = {3, 9, 4};
//************end of 2D car definition************
//************start BL def.***********
Point(10)={0,thic,0,clb};
Point(11)={-0.1-thic,-0.1,0,clb};
Point (12)={-0.1-thic,-0.188,0,clb};
Point(13) = {0-thic*1.5,-(0.288+thic),0,clb};
Point (14) = {0.697+0.247-0.222*Cos(angle)+thic*Sin(angle/2),thic,0,clb};
Point (15) = {0.944+thic,-0.222*Sin(angle)+thic*Sin((Pi/2-angle)/2),0,clb};
Point(16) = {0.944+thic,-0.338,0,clb};
Line(8) = {10, 14};
Line(9) = {14, 15};
Line(10) = {15, 16};
Line(11) = {16, 13};
Line(12) = {11, 12};
Line(13) = {13, 4};
Line(14) = {5, 16};
Line(15) = {7, 15};
Line(16) = {6, 14};
Line(17) = {10, 1};
Line(18) = {11, 2};
Line(19) = {12, 3};
Line(20) = {12, 13};
Circle(21) = {10, 8, 11};
Line Loop(22) = {9, -15, -2, 16};
Ruled Surface(23) = {22};
Line Loop(24) = {1, 16, -8, 17};
Ruled Surface(25) = {24};
Line Loop(26) = {6, -18, -21, 17};
Ruled Surface(27) = {26};
Line Loop(28) = {5, -19, -12, 18};
Ruled Surface(29) = {28};
Line Loop(30) = {7, -13, -20, 19};
Ruled Surface(31) = {30};
Line Loop(32) = {4, -13, -11, -14};
Ruled Surface(33) = {32};
Line Loop(34) = {3, 14, -10, -15};
Ruled Surface(35) = {34};
Transfinite Line {14,15,16}=cellu Using Progression celluP;
Transfinite Line {12,5}=plav;
Transfinite Line {7,20,6,21}=ceav;
Transfinite Line {3,10,9,2}=anga;
Transfinite Line {13,17,18,19}=cellu Using Progression 1/celluP;
Transfinite Line {4,11}=lbas Using Bump lbasB;
Transfinite Line {8,1}=ltop Using Bump ltopB;
Transfinite Surface {23}={7,15,14,6};
Transfinite Surface {25}={1,10,14,6};
Transfinite Surface {27}={1,10,11,2};
Transfinite Surface {29}={11,2,12,3};
Transfinite Surface {31}={3,12,13,4};
Transfinite Surface {33}={13,4,5,16};
Transfinite Surface {35}={5,16,7,15};
Recombine Surface {23,25,27,29,31,33,35};
43

//************end of BL definition************
//************start of outter box definition************
Point(1313) = {-2.8,-0.338,0,0.1};
Point(1414) = {-2.8,3.6,0,0.1};
Point(1515) = {3.8,3.6,0,0.1};
Point (1616) = {3.8,-0.338,0,0.1};
Point (1717) = {3.8,-0.222*Sin(angle)+thic*Sin((Pi/2-angle)/2)+(3.8-0.944)*Sin((Pi/2-angle)/2),0,0.1};
Point (1818) = {0.697+0.247-0.222*Cos(angle)+thic*Sin(angle/2)+(3.6-thic)*Sin(angle/2),3.6*Cos(angle/2),0,0.1};
Point (1919) = {0-(3.6-thic)*Sin(angle/2),3.6*Cos(angle/2),0,0.1};
Point(2020) = {-2.8,0.9,0,0.1};
Point(2121) = {-2.8,2,0,0.1};
//************end of outter box definition************
Line(36) = {1313, 2020};
Line(37) = {2020, 2121};
Line(40) = {1919, 1818};
Line(43) = {1717, 1616};
Line(44) = {1616, 16};
Line(45) = {13, 1313};
Line(46) = {2020, 12};
Line(47) = {11, 2121};
Line(48) = {10, 1919};
Line(49) = {1818, 14};
Line(50) = {1717, 15};
Line(51) = {1818, 1717};
Line(52) = {1919, 2121};
Line Loop(59) = {51, 50, -9, -49};
Ruled Surface(60) = {59};
Line Loop(61) = {48, 40, 49, -8};
Ruled Surface(62) = {61};
Line Loop(65) = {52, -47, -21, 48};
Ruled Surface(66) = {65};
Line Loop(67) = {46, -12, 47, -37};
Ruled Surface(68) = {67};
Line Loop(69) = {36, 46, 20, 45};
Ruled Surface(70) = {69};
Line Loop(71) = {50, 10, -44, -43};
Ruled Surface(72) = {71};
Transfinite Line {51}=anga;
Transfinite Surface {60}={14,15,1717,1818};
Transfinite Line {47,48,45,48}=obox Using Progression oboxP;
Transfinite Line {46,49,44,50}=obox Using Progression 1/oboxP;
Transfinite Line {52}=ceav;
Transfinite Surface {66}={1919,2121,10,11};
Transfinite Surface {62}={10,14,1919,1818};
Transfinite Line {40}=ltop Using Bump ltopB;
Transfinite Surface {68}={11,12,2020,2121};
Transfinite Line {37}=plav;
Transfinite Surface {70}={12,13,2020,1313};
Transfinite Line {36}=ceav;
Transfinite Surface {72}={15,16,1616,1717};
Transfinite Line {43}=anga;
Recombine Surface {62,66,60,68,70,72};
44

Extrude {0, 0, 0.01} {
Surface{72, 70, 68, 66, 62, 60, 35, 33, 31, 29, 27, 25, 23};
Layers {1};
Recombine;
}
Physical Surface("frontAndBack") = {204, 60, 94, 72, 182, 62, 160, 66, 138, 68, 116, 70, 336, 25, 314, 27, 292, 29, 270, 31, 248, 33, 226, 35, 358, 23};
Physical Surface("inlet") = {137, 103, 147};
Physical Surface("outlet") = {191, 93};
Physical Surface("movingWall") = {173, 89, 115, 243};
Physical Surface("fixedWalls") = {257, 279, 301, 323, 353, 213, 235};
Physical Volume(364) = {13, 12, 11, 10, 9, 8, 7, 6, 5, 4, 3, 2, 1};
45
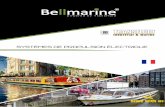




![[eBook FR - French - Francais] Techniques de Propulsion Fusées](https://static.fdocuments.fr/doc/165x107/5571fe1649795991699a9791/ebook-fr-french-francais-techniques-de-propulsion-fusees.jpg)