Rapport d'activités - 1998-2001
212
LABORATOIRE D’INFORMATIQUE DE ROBOTIQUE ET DE MICROÉLECTRONIQUE DE MONTPELLIER Rapport d’activité UMR 5506 Université Montpellier II / CNRS 1998-2001
Transcript of Rapport d'activités - 1998-2001

LABORATOIRE D’INFORMATIQUE DE ROBOTIQUE ET DE MICROÉLECTRONIQUE DE MONTPELLIER
Rapport d’activité
UMR 5506 Université Montpellier II / CNRS
1998-2001

Présentation générale 7
Département Acquisition et représentation 15des connaissancesPersonnels du département 17Introduction générale 21Bases de données et systèmes 27Interaction homme-machine 35Objets et agents 43
Département Informatique fondamentale 55et applicationsPersonnels du département 57Introduction générale 59Algorithmique combinatoire 63Optimisation et modélisation des réseaux 67Combinatoire des mots et combinatoire énumérative 69Visualisation de graphes 71Arithmétique des ordinateurs 73Imagerie combinatoire 75Méthodes et algorithmes pour la bioinformatique 77Représentation de connaissances par des graphes étiquetés 81Systèmes à contraintes 85Représentation par objets 87
Département Microélectronique 91Personnels du département 93Introduction générale 95Conception de systèmes intégrés (SOC) 99Synthèse physique submicronique 105Test de circuits et systèmes intégrés 113Micro-systèmes 125Participation aux activités du CNFM 129
Département Robotique 131Personnels du département 133Introduction générale 135Synthèse de systèmes dynamiques complexes 139Navigation, perception et pilotage de véhicules autonomes 147Gestion et supervision des systèmes complexes 155Prospective 159
Projets inter-départements 161Coconut 163Informatique et chimie 167
Services communs 169
Partenariat, valorisation et 179animation de la recherche
Sommaire

Présentation généraleIntroduction Bilan 98-01
Production scientifiqueEvolution des effectifs
Budget opérationnelFormation par la recherche
Formation initialeCréation d’entreprise
CongrèsObjectifs scientifiques
Organigramme fonctionnel
Rapport d’activité du LIRMM 1998-2001

Présentation générale
Créé en 1992 par une volonté scientifique commune du CNRS et de l'Université Montpellier II (opération dite « structurante »), le Laboratoire d'informatique, de robotique et de microélectronique de Montpellier (LIRMM), fusion de deux laboratoires (CRIM et LAMM), regroupe ainsi des automaticiens, des roboticiens, des informaticiens et des microélectroniciens, autrement dit, des chercheurs des sections 07 et 08 du CNRS et des enseignant-chercheurs des sections 27, 61 et 63 du CNU. Cette création a placé le LIRMM au coeur des Sciences et Technologies de l'Information et de la Communication, le nouveau département scientifique du CNRS. Le spectre des activités de recherche du LIRMM est très large et va de la conception de circuits, à la modélisation de systèmes complexes à base d'agents en passant par des études algorithmiques, la bioinformatique, les interactions homme-machine, la robotique. Ces activités sont développées au sein des quatre départements scientifiques de recherche qui composent le LIRMM :
• Acquisition et Représentation des Connaissances (ARC),
• Informatique Fondamentale et Applications (IFA),
• Microélectronique (MIC),
• Robotique (ROB). Ce rapport présente le bilan détaillé des activités de chacun d’entre eux, leur prospective, les projets inter-départements en cours et les services communs. En annexe sont listées toutes les activités d’animation de la recherche menées par les membres du LIRMM. Quant aux publications issues du LIRMM au cours de la période 1998-2001, elles sont recensées par quatre fascicules annuels joints au présent rapport.
Bilan de la période 1998-2001
Profitant du formidable développement du domaine des STIC, le LIRMM est devenu l'un des laboratoires les plus importants du CNRS en région Languedoc-Roussillon. Avec une population de près de 250 personnes (permanents et thésards), le LIRMM est également l’un des plus gros laboratoires du département STIC du CNRS. Les collaborations alliant des chercheurs de cultures initiales différentes se sont presque banalisées au sein du LIRMM, et plusieurs projets interdisciplinaires ont déjà été réalisés avec succès, tels par exemple : « Apprentissage et test de circuits » ou « Systèmes multi-agents et robotique ». Sur un plan matériel, ces quatre années ont permis la construction d'une extension du LIRMM et la construction de la Halle de Mécatronique partagée entre le LIRMM, le Laboratoire de Mécanique et de Génie Civil (LMGC - UMR 5508) et le CNFM (Comité National de Formation en Microélectronique). Ces constructions ont accompagné la croissance continue des effectifs du LIRMM. Le LIRMM fêtera d'ailleurs ses dix ans d'existence lors de l'inauguration de la Halle de Mécatronique prévue à l’automne 2002.
7
Production scientifique
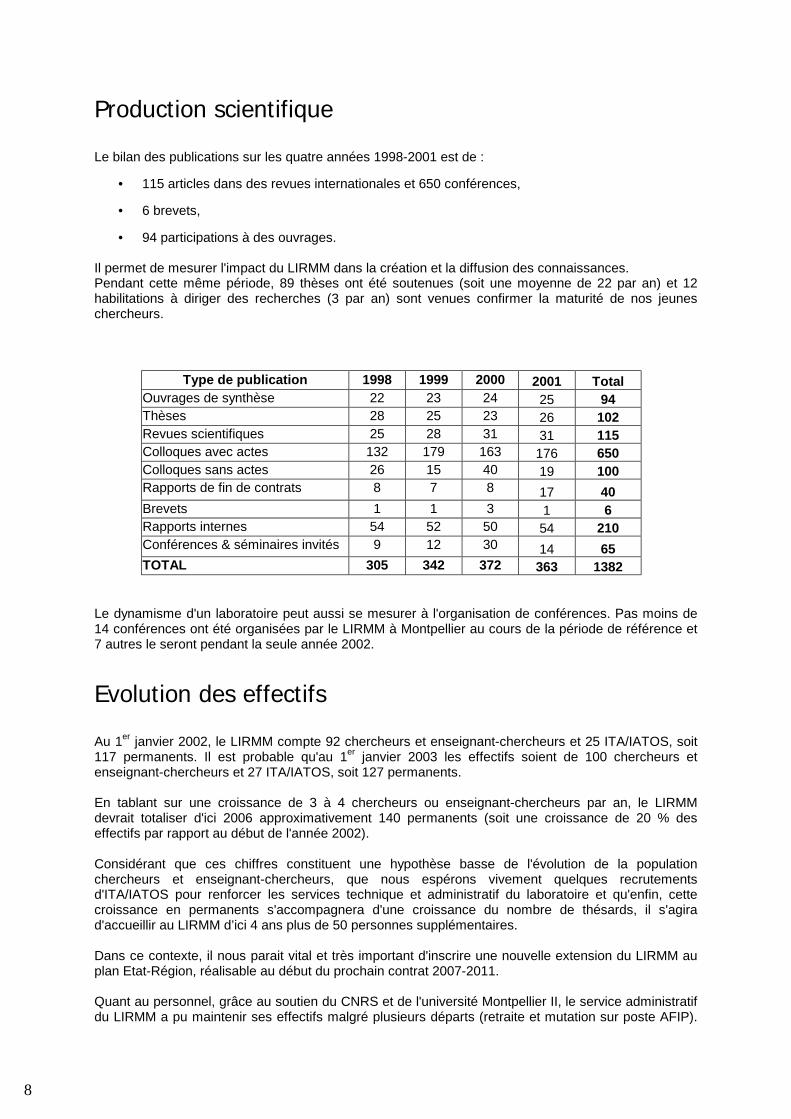
Le bilan des publications sur les quatre années 1998-2001 est de :
• 115 articles dans des revues internationales et 650 conférences,
• 6 brevets,
• 94 participations à des ouvrages. Il permet de mesurer l'impact du LIRMM dans la création et la diffusion des connaissances. Pendant cette même période, 89 thèses ont été soutenues (soit une moyenne de 22 par an) et 12 habilitations à diriger des recherches (3 par an) sont venues confirmer la maturité de nos jeunes chercheurs.
Type de publication 1998 1999 2000 2001 Total Ouvrages de synthèse 22 23 24 25 94 Thèses 28 25 23 26 102 Revues scientifiques 25 28 31 31 115 Colloques avec actes 132 179 163 176 650 Colloques sans actes 26 15 40 19 100 Rapports de fin de contrats 8 7 8 17 40 Brevets 1 1 3 1 6 Rapports internes 54 52 50 54 210 Conférences & séminaires invités 9 12 30 14 65 TOTAL 305 342 372 363 1382
Le dynamisme d'un laboratoire peut aussi se mesurer à l'organisation de conférences. Pas moins de 14 conférences ont été organisées par le LIRMM à Montpellier au cours de la période de référence et 7 autres le seront pendant la seule année 2002.
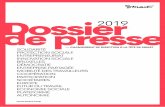
Evolution des effectifs
Au 1er janvier 2002, le LIRMM compte 92 chercheurs et enseignant-chercheurs et 25 ITA/IATOS, soit 117 permanents. Il est probable qu'au 1er janvier 2003 les effectifs soient de 100 chercheurs et enseignant-chercheurs et 27 ITA/IATOS, soit 127 permanents. En tablant sur une croissance de 3 à 4 chercheurs ou enseignant-chercheurs par an, le LIRMM devrait totaliser d'ici 2006 approximativement 140 permanents (soit une croissance de 20 % des effectifs par rapport au début de l'année 2002). Considérant que ces chiffres constituent une hypothèse basse de l'évolution de la population chercheurs et enseignant-chercheurs, que nous espérons vivement quelques recrutements d'ITA/IATOS pour renforcer les services technique et administratif du laboratoire et qu'enfin, cette croissance en permanents s'accompagnera d'une croissance du nombre de thésards, il s'agira d'accueillir au LIRMM d’ici 4 ans plus de 50 personnes supplémentaires. Dans ce contexte, il nous parait vital et très important d'inscrire une nouvelle extension du LIRMM au plan Etat-Région, réalisable au début du prochain contrat 2007-2011. Quant au personnel, grâce au soutien du CNRS et de l'université Montpellier II, le service administratif du LIRMM a pu maintenir ses effectifs malgré plusieurs départs (retraite et mutation sur poste AFIP).
8

Hélas, il n'en est pas de même pour le service technique dont les effectifs sont en diminution malgré une charge de travail en augmentation constante. A la croissance prévue des effectifs chercheurs, s’ajoute la mise en place de l’ARTT. Ainsi il est très important de recruter à court terme 2 à 3 ITA ou ITARF au service technique afin de maintenir la qualité du service rendu aux chercheurs.
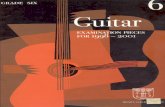
Budget opérationnel (hors salaires et infrastructure)
Recettes moyennes annuelles sur la période 1998-2001 : 1 485 594 € HT
UM214%
CNRS18%
Contrats européens14%
Région L R4%
Industrie27%
Ministères17%
Autres établissements de
recherche6%
Dépenses moyennes annuelles sur la période 1998-2001 : 1 500 000 € HT
Salaires31%
Equipement21%
Fonctionnement27%
Missions21%
1er Janv. 1992
54 ch. & ens. Ch 16 ITA.
1er Oct.. 1998 75 ch. & ens. Ch (+40%)
24 ITA (+50%)
1er Janv. 2003 92 ch. & ens. Ch
(+23%) 25 ITA (+4%)
31 Déc. 2006 116 ch. & ens. Ch
(+20%) 25 ITA (+0%)
9

Formation par la recherche
Un membre du LIRMM (M. Robert) assure la direction de l'École Doctorale I2S (Information, Structures Systèmes) de l'Université Montpellier II. Cette école regroupe six formations doctorales, dont deux sont pilotées par le LIRMM qui en est la structure d'accueil principale :
• formation doctorale en Informatique (25 étudiants en DEA),
• formation doctorale « SYstèmes Informatiques, Automatiques et Microélectroniques » (49 étudiants en DEA).
Des relations scientifiques sont bien établies avec le CEMAGREF (Montpellier) et le LGI2P (EERIE de Nîmes/EMA d'Alès) qui sont des laboratoires d'accueil du DEA SYAM pour le premier et des deux DEA pour le second.
Implication dans la formation initiale
Depuis de nombreuses années, les enseignants, les chercheurs et les ITA du LIRMM sont fortement impliqués dans :
• la formation d'ingénieurs de l'Institut des Sciences de l'Ingénieur de Montpellier (ISIM) : au travers du département Microélectronique et Automatique, dont ils assurent la responsabilité, et du département Informatique et Gestion (flux sortant : 50 ingénieurs).
• les formations de 1er cycle : DEUG, I.U.T. Département Informatique et Département Génie des Télécommunications et Réseaux ;
• les formations de 2ème cycle : licence, maîtrise et I.U.P. d'informatique (dont ils assurent la responsabilité) ; licence et maîtrise EEA ;
• les DESS suivants (dont ils assurent la responsabilité) : DESS Informatique Appliquée aux Organisations (IAO) qui possède une option bioinformatique, et DESS d'informatique (TNI).
Création d'entreprise
Le LIRMM est fier d'avoir aidé à la création de la start-up de robotique ludique : Wany. Cette jeune société de plus de 25 personnes est dirigée par E. Lavarec qui vient de soutenir sa thèse au LIRMM. Elle affiche déjà de nombreux prix dont en 2001 : le prix IST (Information Society Technologies, organisé par le Conseil européen des sciences appliquées et de l'ingénierie), le prix du meilleur « design » décerné par l'APCI (agence pour la promotion de la création industrielle) et le concours Lépine au Salon du Jouet. En 2000, elle a également remporté le concours de création d'entreprise de technologies innovantes du Ministère de la Recherche (déjà obtenu en 1999) et le prix du meilleur jeune diplômé de la création d'entreprise innovante.
10

Congrès organisés par le LIRMM
1998
B’98 Int. : Conference on B (organisateur : C. Boksenbaum) ICCS’98 : Int. Conference on Conceptual Structures (organisatrice : M.L. Mugnier) INFORSID’98 (organisatrice : D. Hérin)
1999
IHM'99 : 11ème Conférence internationale francophone sur l'Interaction Homme-Machine (organisatrice : J. Nanard) ORDAL'99 : Orders, Algorithms and Applications (organisateur : M. Habib) JNRR'99 : Journées Nationales de la Recherche en Robotique (organisateur : E. Dombre)
2000
WitrEC : Advanced school and Workshop on Web Information Technologies: Research, Education, Business (organisateur : S.A. Cerri) DCIS’00 : XVth Conference on Design of Circuits and Integrated Systems (organisateur : D. Auvergne) IMSTW’00 : International Mixed Signal Testing Workshop (organisateur : M. Renovell) JOBIM’00 : Journées Ouvertes Biologie Informatique Mathématiques (organisateurs : G. Caraux & O. Gascuel)
2001
GRP’01 : Journées Nationales du Groupe de Recherche en Productique (organisateur : F. Prunet) CASSINI’01 : Géomatique et Espace Rural (organisatrice : T. Libourel) VLSI’01 : 11th International Conference on Very Large Scale Integration (organisateur : M. Robert) P_RSM’01 : Perception pour la robotique sous-marine (organisateur : B. Jouvencel)
11

Objectifs scientifiques pour le renouvellement de l'UMR
Le LIRMM entend être un acteur incontournable du développement et de la structuration du champ disciplinaire des STIC sur Montpellier et la Région Languedoc-Roussillon. C'est dans cet esprit que ces dernières années nous avons tissé des liens scientifiques et initié des collaborations avec, par exemple, les mathématiciens (Géométrie, Topologie, Algèbre UMR 5030), et les physiciens de l'UMII (le Groupe d'Astroparticules de Montpellier : GAM UMR 5139), le CIRAD (Botanique et Bioinformatique de l'Architecture des Plantes : AMAP UMR 5120, le département TERA). Les années à venir seront l'occasion de renforcer nos liens avec l'INRIA, sur la base de projets scientifiques communs entre le LIRMM et l'unité INRIA de Sophia-Antipolis. Une première collaboration a déjà démarré dans le cadre d'un projet de robotique médicale : DEMAR (DEambulation et Mouvement ARticifiel). En interne, le LIRMM soutiendra toute initiative scientifique entre ses quatre départements, tel par exemple l'axe transversal « Images » en cours de constitution, qui réunit des chercheurs des départements d'Informatique, de Microélectronique et de Robotique.
Pour conclure
A l’occasion de ce rapport d’activité à quatre ans, il convient de remercier l’équipe de direction qui a conduit le LIRMM jusqu’à fin 2000, Gaston Cambon et Danièle Hérin, ainsi que le personnel administratif et technique qui, au quotidien, accompagne nos activités de recherche.
Michel Habib, directeur
12
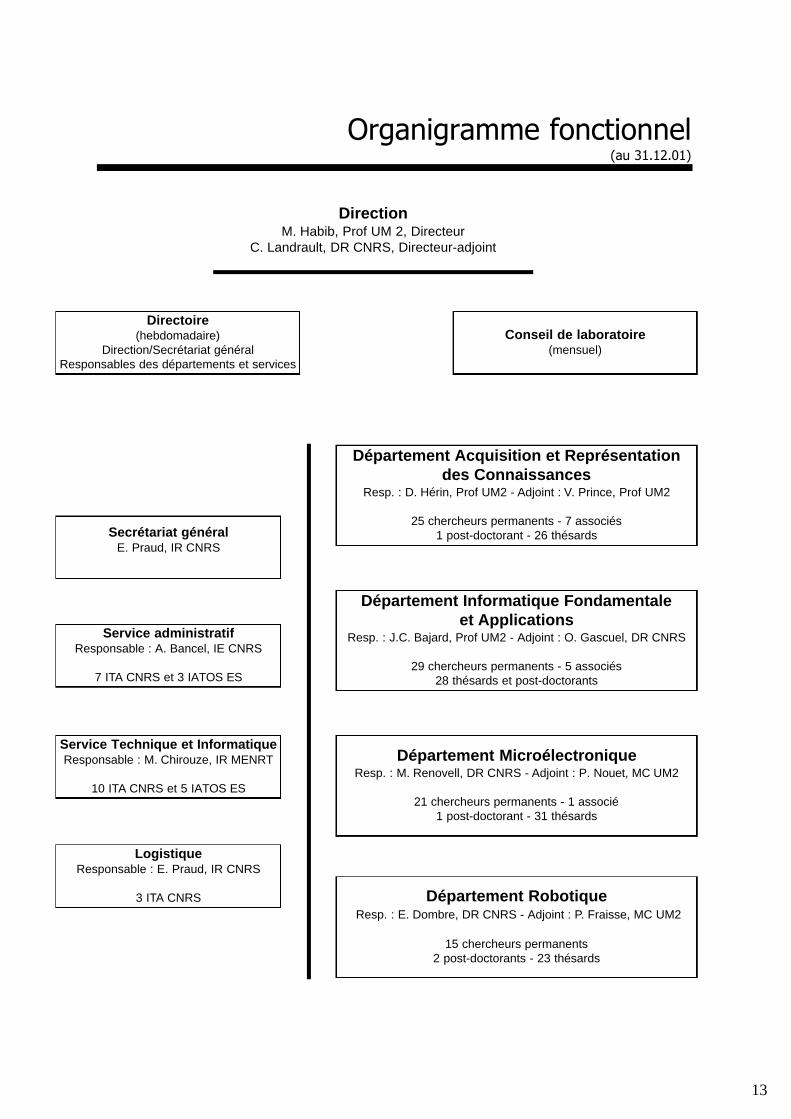
DirectionM. Habib, Prof UM 2, Directeur
C. Landrault, DR CNRS, Directeur-adjoint
Directoire (hebdomadaire)
Direction/Secrétariat généralResponsables des départements et services
Conseil de laboratoire(mensuel)
Secrétariat généralE. Praud, IR CNRS
Service administratifResponsable : A. Bancel, IE CNRS
7 ITA CNRS et 3 IATOS ES
Service Technique et InformatiqueResponsable : M. Chirouze, IR MENRT
10 ITA CNRS et 5 IATOS ES
LogistiqueResponsable : E. Praud, IR CNRS
3 ITA CNRS
Département Acquisition et Représentation des Connaissances
Resp. : D. Hérin, Prof UM2 - Adjoint : V. Prince, Prof UM2
25 chercheurs permanents - 7 associés 1 post-doctorant - 26 thésards
Département Informatique Fondamentale et Applications
Resp. : J.C. Bajard, Prof UM2 - Adjoint : O. Gascuel, DR CNRS
29 chercheurs permanents - 5 associés 28 thésards et post-doctorants
Département MicroélectroniqueResp. : M. Renovell, DR CNRS - Adjoint : P. Nouet, MC UM2
21 chercheurs permanents - 1 associé 1 post-doctorant - 31 thésards
Département RobotiqueResp. : E. Dombre, DR CNRS - Adjoint : P. Fraisse, MC UM2
15 chercheurs permanents 2 post-doctorants - 23 thésards
Organigramme fonctionnel(au 31.12.01)
13


Département ARC Acquisition et représentation
des connaissances
Responsable : Danièle HérinAdjoint : Violaine Prince
Rapport d’activité du LIRMM 1998-2001

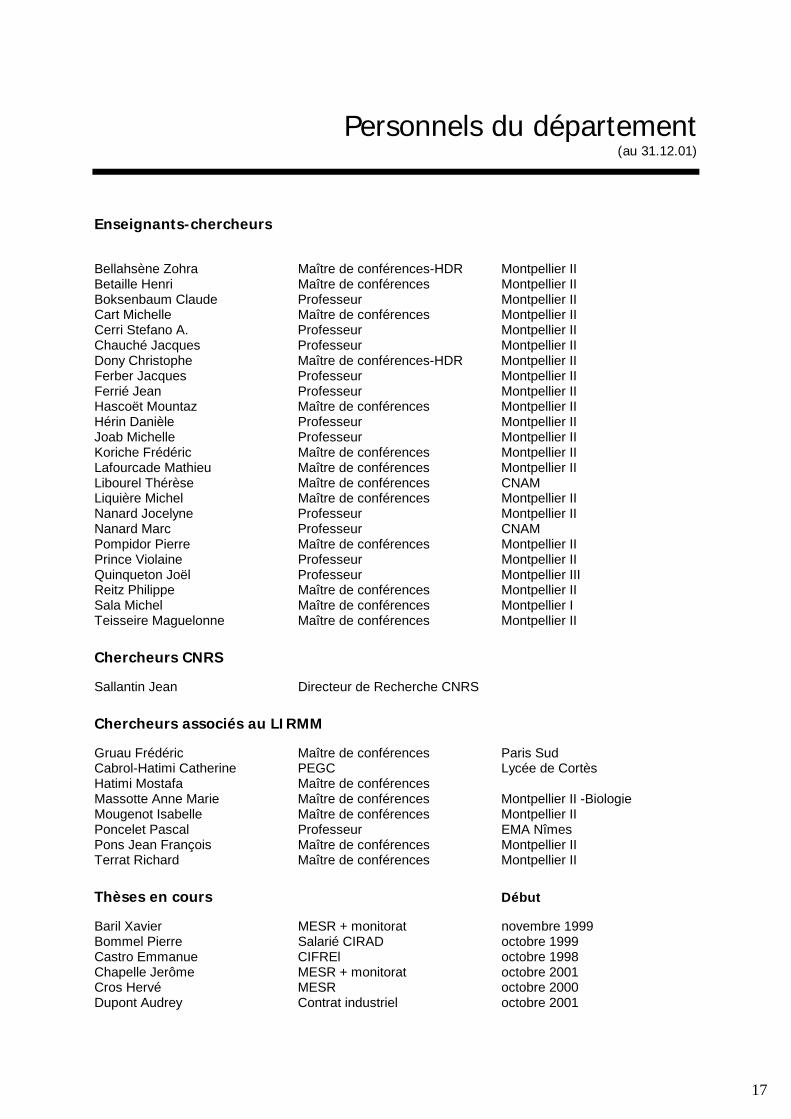
Personnels du département (au 31.12.01)
Enseignants-chercheurs
Bellahsène Zohra Maître de conférences-HDR Montpellier II Betaille Henri Maître de conférences Montpellier II Boksenbaum Claude Professeur Montpellier II Cart Michelle Maître de conférences Montpellier II Cerri Stefano A. Professeur Montpellier II Chauché Jacques Professeur Montpellier II Dony Christophe Maître de conférences-HDR Montpellier II Ferber Jacques Professeur Montpellier II Ferrié Jean Professeur Montpellier II Hascoët Mountaz Maître de conférences Montpellier II Hérin Danièle Professeur Montpellier II Joab Michelle Professeur Montpellier II Koriche Frédéric Maître de conférences Montpellier II Lafourcade Mathieu Maître de conférences Montpellier II Libourel Thérèse Maître de conférences CNAM Liquière Michel Maître de conférences Montpellier II Nanard Jocelyne Professeur Montpellier II Nanard Marc Professeur CNAM Pompidor Pierre Maître de conférences Montpellier II Prince Violaine Professeur Montpellier II Quinqueton Joël Professeur Montpellier III Reitz Philippe Maître de conférences Montpellier II Sala Michel Maître de conférences Montpellier I Teisseire Maguelonne Maître de conférences Montpellier II
Chercheurs CNRS
Sallantin Jean Directeur de Recherche CNRS
Chercheurs associés au LIRMM
Gruau Frédéric Maître de conférences Paris Sud Cabrol-Hatimi Catherine PEGC Lycée de Cortès Hatimi Mostafa Maître de conférences Massotte Anne Marie Maître de conférences Montpellier II -Biologie Mougenot Isabelle Maître de conférences Montpellier II Poncelet Pascal Professeur EMA Nîmes Pons Jean François Maître de conférences Montpellier II Terrat Richard Maître de conférences Montpellier II
Thèses en cours Début
Baril Xavier MESR + monitorat novembre 1999 Bommel Pierre Salarié CIRAD octobre 1999 Castro Emmanue CIFREl octobre 1998 Chapelle Jerôme MESR + monitorat octobre 2001 Cros Hervé MESR octobre 2000 Dupont Audrey Contrat industriel octobre 2001
17
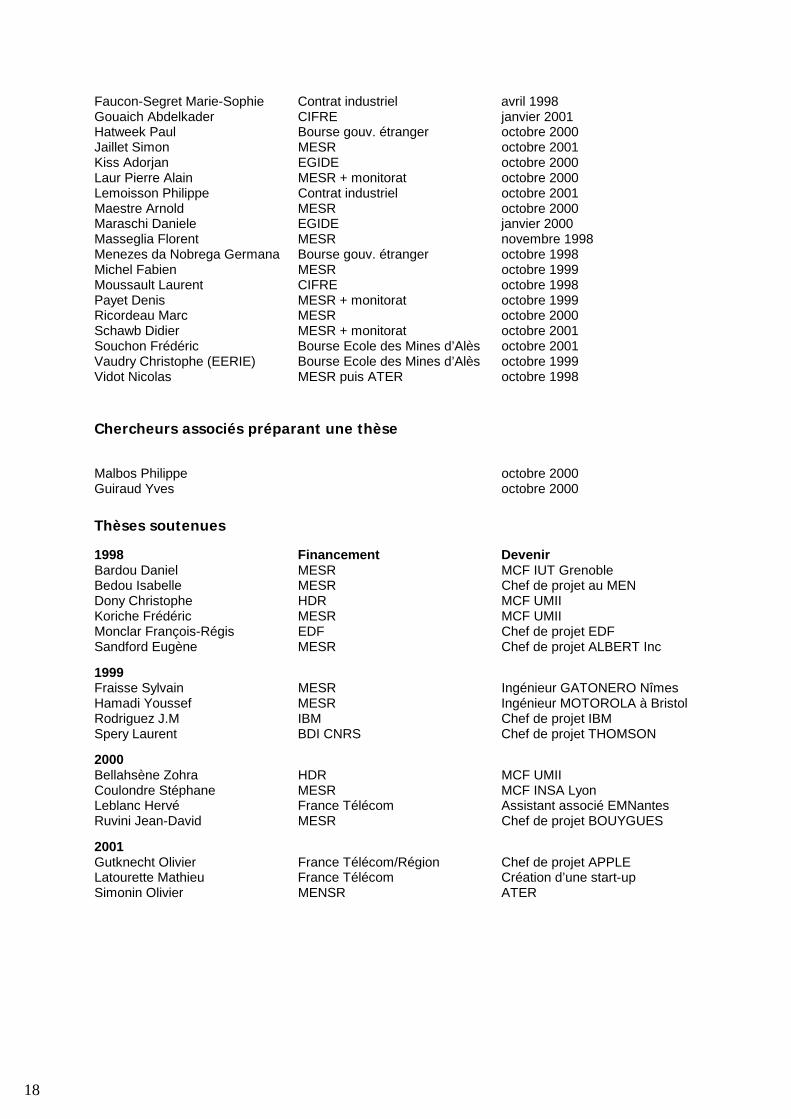
Faucon-Segret Marie-Sophie Contrat industriel avril 1998 Gouaich Abdelkader CIFRE janvier 2001 Hatweek Paul Bourse gouv. étranger octobre 2000 Jaillet Simon MESR octobre 2001 Kiss Adorjan EGIDE octobre 2000 Laur Pierre Alain MESR + monitorat octobre 2000 Lemoisson Philippe Contrat industriel octobre 2001 Maestre Arnold MESR octobre 2000 Maraschi Daniele EGIDE janvier 2000 Masseglia Florent MESR novembre 1998 Menezes da Nobrega Germana Bourse gouv. étranger octobre 1998 Michel Fabien MESR octobre 1999 Moussault Laurent CIFRE octobre 1998 Payet Denis MESR + monitorat octobre 1999 Ricordeau Marc MESR octobre 2000 Schawb Didier MESR + monitorat octobre 2001 Souchon Frédéric Bourse Ecole des Mines d’Alès octobre 2001 Vaudry Christophe (EERIE) Bourse Ecole des Mines d’Alès octobre 1999 Vidot Nicolas MESR puis ATER octobre 1998
Chercheurs associés préparant une thèse
Malbos Philippe octobre 2000 Guiraud Yves octobre 2000
Thèses soutenues
1998 Financement Devenir Bardou Daniel MESR MCF IUT Grenoble Bedou Isabelle MESR Chef de projet au MEN Dony Christophe HDR MCF UMII Koriche Frédéric MESR MCF UMII Monclar François-Régis EDF Chef de projet EDF Sandford Eugène MESR Chef de projet ALBERT Inc
1999 Fraisse Sylvain MESR Ingénieur GATONERO Nîmes Hamadi Youssef MESR Ingénieur MOTOROLA à Bristol Rodriguez J.M IBM Chef de projet IBM Spery Laurent BDI CNRS Chef de projet THOMSON
2000 Bellahsène Zohra HDR MCF UMII Coulondre Stéphane MESR MCF INSA Lyon Leblanc Hervé France Télécom Assistant associé EMNantes Ruvini Jean-David MESR Chef de projet BOUYGUES
2001 Gutknecht Olivier France Télécom/Région Chef de projet APPLE Latourette Mathieu France Télécom Création d’une start-up Simonin Olivier MENSR ATER
18

Ingénieurs Docteurs sur contrats
Duroux Patrice Souche Bruno Divol Jacques Hafidi Abdelali
19


Introduction générale
Présentation du département
Le département « Acquisition et Représentation de Connaissances » se compose, au 31 décembre 2001, de 25 chercheurs permanents dont 24 enseignants chercheurs (11 PR et 13 MC dont 2 HDR), 1 chercheur CNRS (DR) et 26 doctorants. A ces membres viennent s'ajouter 12 non permanents dont 7 enseignants chercheurs associés, 1 post-doc, et en moyenne par an, 2 visiteurs étrangers et 2 ingénieurs contractuels dans le cadre des contrats européens et industriels. Le département, au travers du laboratoire, est équipe d'accueil de la Formation Doctorale en Informatique et accueille chaque année environ 12 étudiants de DEA, ainsi que 2 ingénieurs stagiaires CNAM. Les travaux réalisés par les membres du département concernent l'information, l'interaction et la cognition, et se caractérisent par une approche basée à la fois sur la conception de modèles, de logiciels, d’architectures logicielles, et d'algorithmes, et sur la prise en compte de l'usager dans le processus, dès la phase de conception. Les modèles et logiciels sont validés sur des applications complexes et l'interdisciplinarité est très forte, en particulier avec les sciences humaines et sociales (droit/économie/gestion, psychologie cognitive, linguistique, géographie-SIG), la biologie, la santé, l'environnement, et les mathématiques (théorie des catégories, algèbre). Les problématiques étudiées concernent, les volumes importants d'informations hétérogènes et distribuées, en particulier l'extraction, le stockage, l'annotation et la recherche d'informations ; les systèmes complexes tels que le Web, la biologie et l'environnement ; les interactions, d'une part entre systèmes informatiques et utilisateurs, et d'autre part entre systèmes informatiques. L'ensemble des activités de recherche du département s'articulent autour de trois thématiques :
• Bases de données et systèmes
• Fouilles de données (data mining)
• Entrepôts de données (data warehouse)
• Modélisation et extraction de connaissances sur le Web
• Systèmes répartis
• Interaction Homme-Machine et Langage Naturel
• Interaction Homme-Machine et Hypermédias
• Traitement Automatique du Langage
• E-Learning
• Objets et Agents
• Systèmes Multi-Agents
• Apprentissage et rationalité
• E-Dialogues
• Objets pour les Composants Logiciels et les Bases de Données
• Agents, Logique et Contraintes
21

Les membres du département travaillent depuis plusieurs années sur ces thèmes et ont acquis une bonne reconnaissance nationale et internationale attestée par des publications, des plates-formes logicielles et des logiciels (le plus souvent accessibles sur le web pour les trois thèmes) et des brevets. Les travaux fondamentaux réalisés sur ces thèmes donnent lieu à des applications, en particulier sur le E-commerce, les systèmes environnementaux, le E-Learning, la recherche d'information, la robotique, le droit et l'économie.
Bilan des activités 1998-2001
Dans la période 1998-2001, le département s'est renforcé de 5 enseignants-chercheurs dont 3 professeurs, S.A Cerri (Agents et e-Learning), V. Prince (Langage naturel) et M. Joab (E-Learning) ; 3 maîtres de conférences de l'UM2, F. Koriche (Agents et Logique), M. Hascöet (Visualisation d'information) et 1 maître de conférences de l’UM1, M. Sala (modélisation des systèmes de connaissances). La politique du département a été de renforcer les thèmes existants et d'éviter une dispersion des compétences. Durant cette période, 19 thèses et 3 Habilitations à Diriger les Recherches ont été soutenues, et les travaux se traduisent en moyenne chaque année par 9 revues et chapitres d'ouvrages, 4 ouvrages édités et 36 conférences avec actes, 12 contrats en cours dont 3 européens, et ont donné lieu à 2 brevets.
BD et Systèmes
IHM et
Lang. nat.
Objets et agents
InteractionInformationCognition
22

Les membres du département ont acquis une renommée internationale qui se traduit par exemple par la présidence du SIGWEB de l'ACM (hypermédias), l'évaluation en tant qu'expert des Universités de Hollande dans le domaine de l'informatique, le recrutement de certains thésards au sein d’universités américaines, la diffusion d'ouvrages traduits en anglais et en allemand, la participation à diverses études réalisées dans le domaine des agents réactifs. Au niveau national, tous les thèmes sont impliqués dans des groupes de recherche de type GDR, et au niveau régional, le département s'est impliqué fortement dans la structuration du transfert de recherche régional. Les collaborations avec l'industrie se sont traduites par des contrats passés avec de grandes entreprises comme France Télécom (CNET), Euriware, Framatome, IBM, Motorola, INA, Thalès, Sanofi, ou BNP-Paribas, mais également avec des PME régionales (une moyenne de 3 transferts par an). Les collaborations avec les autres organismes ou laboratoires scientifiques ont eu lieu principalement avec les instituts de recherche montpelliérains orientés sur la biologie des plantes, l'agriculture et l'environnement tels que le CIRAD, l'INRA, l'IRD, le CEMAGREF, l'IGH (génétique), le CCIPE (pour sa composante « chimie »), l'UMR Espace et le Laboratoire de mathématiques de l'UM2, l'EMA (site EERIE de Nîmes). Au niveau international, c’est avec une quinzaine d'universités que le département interagit. Dans le thème Bases de données et Systèmes, les travaux en Data Mining se référent au processus de modélisation, de gestion et d'extraction de connaissances dans les bases de données volumineuses, et ont donné lieu à des algorithmes de recherches efficaces de règles d'association et de motifs séquentiels, basés sur une approche incrémentale et temps réel. Une plate-forme d'intégration de ces algorithmes a été développée. Un projet RNTL "Contexte Bourse" analyse le comportement des utilisateurs sur le Web. Les travaux sur le Data Warehouse ont porté sur trois problématiques : l’adaptation de vues dans les entrepôts de données, la sélection de vues à matérialiser, et la modélisation de vues pour XML avec le développement d'un système entrepôt de données XML associé. Ils ont donné lieu à un contrat du Ministère de la Santé en collaboration avec des hopitaux et d'autres universités (Versailles, Lyon, Toulouse). La modélisation et l'extraction de connaissances sur le Web "caché" a consisté à rechercher des informations stockées dans les bases de données accessibles sur le Web au travers de formulaires comme c'est le cas pour le e-commerce. L'approche consiste à analyser les formulaires et les textes brefs (labels) qui leur sont associés à structurer les informations extraites en utilisant les ontologies et les agents informationnels. Ces travaux ont fait l'objet d'un contrat CNET avec France Télécom et relèvent du Web sémantique. Les membres de l'équipe Systèmes répartis a rejoint le LIRMM en janvier 2000 et travaillent sur l'accès concurrent à des objets partagés et les risques de défaillance. Ils s'intéressent au maintien de la cohérence de ces objets et à des environnements, d'une part collaboratifs et coopératifs, et d'autre part transactionnels et mobiles. Dans le thème Interaction Homme-Machine et Langage Naturel, les travaux sur l'Interaction Homme-Machine et les Hypermédias traitent de l’interaction utilisateur-système, en particulier pour la production ou la valorisation d’information hypermédia. Ils s'intéressent plus particulièrement à la spécification et la génération de multimédias et hypermédias, aux bibliothèques numériques multimédias, à la conception collaborative d'espace informationnel, et à la visualisation et aux nouvelles métaphores d'interaction. L'équipe Traitement Algorithmique du Langage a travaillé sur la construction de dictionnaires bilingues français-langue cible, via l'anglais, l'indexation de documents textuels et les moteurs de recherche sur la base des vecteurs conceptuels, le développement du logiciel SYGMART au travers de la traduction de programmes d'un langage vers un autre, en particulier la conversion de requêtes SQL, et la traduction et l'intégration de connaissances (ontologies et annotations). L'équipe autour du E-Learning s'est créée en 2000 et a travaillé sur la résolution collaborative de problèmes supervisée et l'aide à la production de ressources pédagogiques. Des études pluridisciplinaires ont été réalisées en collaboration avec l'ERES sur les usages de la formation à distance et la normalisation des ressources pédagogiques. Dans le thème Objets et agents, les membres de l'équipe Systèmes Multi-Agents ont travaillé sur la notion d'organisation dans les SMA, la robotique collective, la simulation distribuée, la notion de mémoire collective ainsi que sur les problèmes de modélisation de satisfaction de contraintes distribuées (projet Coconut) et le raisonnement anytime. Ces travaux ont fait l'objet de plusieurs contrats européens et nationaux. Les collaborations de l'équipe sont multiples : CIRAD et IRD pour la
23
simulation distribuée, équipe de R. Liégeois du département robotique du LIRMM pour la robotique collective, équipe Contraintes de l'IFA pour ce qui concerne les contraintes distribuées. L'équipe a aussi produit un logiciel, MadKit, utilisé internationalement, et un ouvrage sur les multi-agents traduit en anglais et en allemand. Les membres de l'équipe sur l'apprentissage et la rationalité conceptualisent et formalisent le contrôle de transactions intervenant dans la résolution de problèmes à partir des théories de l’apprentissage et celles de la rationalité. Les études conceptuelles et formelles sont expérimentées dans les domaines des transactions commerciales, de la négociation de contrats juridiques, de la supervision de robots autonomes et de l’annotation de séquences génétiques dans le cadre de projets européens IST et en liaison avec BNP-Paribas et DGA systèmes complexes. Les travaux sur les E-dialogues ont démarré en 2000 avec l'arrivée d'un nouveau Professeur et se situent dans les technologies de l'information appliquées au Web en étudiant comment les processus de Communication sont en prise avec le contrôle d'un calcul distribué sur le WEB. Les E-Dialogues sont les processus de communication sur le Web entre des agents Humains et Artificiels. Ils sont étudiés d'un point de vue théorique, expérimental et appliqué en leurs donnant comme fondement les concepts fondamentaux de la théorie des actes de langage. L'équipe "Modèles et langages pour les composants logiciels et les bases de données à objets" s'est créée en 1998 et s'intéresse aux évolutions des modèles, des méthodes de conception, des langages de programmation, des bases de données et des environnements de développement à objets pour la production et l'utilisation de composants logiciels fiables et réutilisables. Les membres travaillent de façon duale, en unissant des connaissances et des savoir-faire, sur la modélisation par objets et sur les langages et les environnements de programmation par objets. Les travaux sur la liaison entre Agents, Logiques, Contraintes sont développés par des membres des départements ARC et IFA. L'objectif principal du projet est de combiner les paradigmes, formalismes et algorithmes étudiés dans ces divers secteurs pour faire émerger de nouveaux résultats théoriques et des applications logicielles.
Perspectives
Dans le thème Bases de données et systèmes, les travaux sur le Data Mining seront orientés d'une part vers le prétraitement des données et l'analyse de texte en collaboration avec l'équipe Langage Naturel du LIRMM (Text Mining). En Data Warehouse, les recherches porteront sur la résolution de requêtes dans l'environnement de données semi-structurées en utilisant les vues dans le contexte XML et sur les bases de données embarquées perçues comme un ensemble de vues matérialisées. Les travaux sur la modélisation et l'extraction de connaissances sur le Web caché se développeront dans la recherche et la structuration d'informations extraites des bases de données et en liaison avec les travaux sur le Web sémantique. L'équipe Systèmes répartis poursuivra ses recherches dans le cadre des systèmes collaboratifs, transactionnels adaptés au cadre de l'informatique mobile. Dans le thème IHM et Langage Naturel, les études en IHM et Hypermédias seront prolongées dans des environnements collaboratifs dédiés à la conception et la production de documents hypermédias en mettant l’accent sur la génération dynamique de documents hypermédias en contexte, en particulier dans le domaine des bibliothèques digitales et de l’enseignement à distance. Les recherches en visualisation de grandes quantités d'informations seront développées. Les travaux en Traitement algorithmique de la langue sur la recherche d’information traitera de l’usage des recherches en sémantique lexicale pour l’extraction de connaissances sur le Web et participera à la création d’une plateforme nationale. L'analyseur SYGMART sera amélioré en analysant le français par prise en compte des syntagmes non unitaires. Le modèle vectoriel de sémantique lexicale en liaison avec les travaux réalisés sur la fouille de texte par l'équipe Data Mining. Les travaux sur le E-Learning seront orientés d'une part vers la simulation et la formation, en liaison avec Thalès Training & Simulation, l'INRETS et le LIP6, pour l'aide à l'évaluation d'un conducteur en formation et, d’autre part, vers la formation à distance. Dans le thème Objets et Agents, l'équipe Systèmes Multi-Agents développera ses travaux en travaillant notamment sur le problème des normes (règles, lois) dans le domaine des organisations multi-agents, les méthodologies de conception de SMA, le développement de la robotique collective, les problèmes liés à l'émergence et à l'apprentissage collectif, ainsi que les problèmes de représentation des connaissances dans un univers distribué. En apprentissage et rationalité, les
24
travaux sur l'apprentissage à partir d’objets structurés, les études sur les théories de la rationalité et le "phi-calcul" et les modèles algébriques seront poursuivis. En modélisation et simulation interactive, les études porteront sur un environnement informatique permettant de modéliser et simuler des systèmes complexes, i.e. des systèmes décomposables impliquant un grand nombre de composants en interaction, et dont la dynamique n'est prévisible que par simulation. En E-dialogue, des environnements et des langages pour l'intégration de logiciels sur le web seront développés, la réflexivité sera introduite comme venant des comportements conversationnels des composants engagés dans une résolution de problèmes. L'objectif est de parvenir à intégrer dans une unique plate-forme les avancées des projets sur le dialogue, la rationalité et l'apprentissage. L'équipe Modèles et langages pour les composants logiciels et les bases de données à objets, orientera ses travaux vers une architecture logicielle pour la réalisation d'applications embarquées temps-réel à base de composants en collaboration avec le département robotique, vers la modélisation des aspects structurels et dynamiques dans les systèmes complexes spatialisés en collaboration avec le CEMAGREF et le CIRAD, et étudiera des modèles de sécurité et de fiabilité pour l'utilisation d'objets, d'agents et de composants logiciels distribués. Les travaux sur le projet Coconut, sur les Agents, logiques et contraintes concerneront notamment l'approximation de connaissances dans les réseaux de contraintes et dans les systèmes multi-agents, la compilation approximative, l’apprentissage à partir de réseaux de contraintes, la planification à base de contraintes, et la formalisation de la communication dans les réseaux de contraintes distribués. L'ensemble de ces travaux se situent dans le nouvel axe du département STIC du CNRS et les différentes compétences pourront être mises en œuvre dans des projets sur la modélisation et la simulation des systèmes complexes et sur le web sémantique.
25

Bases de données et systèmes
Data Mining
Travaux de : P. Poncelet, M. Teisseire
Doctorants : S. Jaillet, P.A. Laur., F. Masseglia Le processus d'ECD (Extraction de connaissances dans les bases de données) ou fouille de données ou datamining désigne l'ensemble des opérations permettant d'exploiter des données volumineuses avec facilité et rapidité (opération de sélection, prétraitement des données, fouille de données puis interprétation des résultats). Le projet Data Mining vise à proposer des algorithmes de recherches efficaces de règles d'association et de motifs séquentiels dans de grandes bases de données.
Extraction de motifs séquentiels ou de règles d'association
Un premier algorithme, appelé PSP a été proposé pour la recherche de règles d'association et de motifs séquentiels. Cet algorithme, basé sur une structure d'arbre préfixé, s'avère particulièrement performant. Un nouvel algorithme, appelé GTC, a ensuite été réalisé pour prendre en compte différentes contraintes de temps lors de la recherche de motifs séquentiels. A l'heure actuelle, les algorithmes de recherche de règles d'association ou de motifs séquentiels offrent de trop nombreuses réponses à un utilisateur final. La prise en compte de nouvelles contraintes de temps permet d'offrir à l'utilisateur final une meilleure appréhension du monde modélisé et surtout permet de ne tenir compte que des motifs réellement intéressants dans le cas d'une analyse du comportement des utilisateurs (comportement à long terme ou à court terme).
Analyse du comportement des utilisateurs sur le Web Un système permettant de prendre en compte la recherche de motifs séquentiels sur les données issues de serveur Web a été proposé. L'approche est très originale car elle offre à l'utilisateur final la possibilité de spécifier les différentes contraintes de temps qu'il souhaite pour analyser complètement les données. En effet, les approches d'analyse de fichiers log existant dans le monde ne proposent pas de gérer efficacement la notion de temps et l'utilisateur ne peut donc pas tirer profit des connaissances acquises (trop de règles, pas d'enchaînement temporel entre les règles, etc.). Conjointement à ces travaux, une approche de modification dynamique de pages Web a été proposée. Il s'agit d'analyser en temps réel le parcours d'un usager sur le Web pour adapter le contenu des pages du serveur de manière à, d'une part optimiser le parcours et, d'autre part, offrir l'information la plus en adéquation avec son comportement.
Vers une approche Inter-Sites Le concept de Web Usage Mining Inter-Site dont l'objectif est de découvrir des comportements fréquents pour une population ciblée (correspondant aux visiteurs communs à plusieurs sites Web) a été défini et traité. A l'heure actuelle, le nombre de partenariats entre sites ne cesse d'augmenter. Les internautes se voient alors offerte la possibilité de naviguer d'un site à l'autre et les fichiers access log des partenaires mis en jeu, ont en commun des visiteurs qui ne sont pas dûs au hasard, mais à ces redirections tacites.
Extraction incrémentale et temps réel
Les données manipulées (bases de données ou serveurs Web) évoluant sans cesse, il est nécessaire de proposer une approche efficace de recherche de motifs séquentiels qui soit capable de prendre en compte les connaissances extraites lors d'une précédente recherche. Un nouvel algorithme, appelé
27
LSE, a été développé pour permettre d'optimiser la recherche de connaissance en ne calculant que le minimum d'information, i.e. les informations nécessaires pour que la connaissance extraite soit représentative de la nouvelle base de données mise à jour. Une approche originale de fouille de données temps réel, HDM, a été proposée. Il s'agit d'un module distribué basé sur une heuristique permettant d'obtenir les motifs de comportements fréquents des utilisateurs du Web de façon immédiate.
LeitmotiV : un cadre pour le processus d'extraction de connaissances
Le nombre d'applications sur lesquelles nous avons concentré nos efforts, nous a conduit vers le développement d'une plateforme d'intégration de nos algorithmes. Elle a pour but de centraliser les méthodes d'extraction de motifs séquentiels, afin d'accepter différents types de données en entrée et de fournir des résultats uniformisés à l'utilisateur. Cette plateforme, appelée LeitmotiV, est à l'heure actuelle capable de traiter les étapes suivantes :
• prétraitement des données à l'aide d'un traducteur (parser) existant.
• acquisition des paramètres de l'étape fouille de données.
• procéder à une fouille de données.
• transformation inverse (processus opposé du prétraitement) des résultats afin d'obtenir une sortie lisible par l'humain, grâce à un deparser,
• manipulation, stockage, et interrogation des résultats.
Collaborations
Nous collaborons avec le Laboratoire PRiSM de Versailles Saint Quentin (contact : Professeur G. Gardarin) pour la recherche efficace de motifs séquentiels, avec le Cemagref et l'Université de la Méditerranée (contact : R. Cicchetti MCF habilité) pour l'application d'algorithmes de Data Mining dans le contexte de la pathologie des barrages, et avec la société AlbertInc (contact : E. Stanford) sur l'application de techniques de Data Mining pour l'analyse de requête en langage naturel (www.albert-inc.com). Cette collaboration rentre dans le cadre d'un contrat Plan Etat Région depuis 1999. Dans ce contexte, le principe général est d'utiliser des techniques de fouille de données (règles d'association et motifs séquentiels) pour optimiser les résultats de recherches d'information sur le Web. Depuis juin 2000, nous participons à un projet RNTL « CONTEXTE Bourse : CONnaissances Temporelles EXTraites de données BOURSièrEs » soutenu par le Ministère de l'Industrie. L'objectif de ce projet est d'étendre les systèmes d'informations industriels et commerciaux via Internet en proposant un ensemble de composants logiciels pour la découverte de connaissances sur des données temporelles structurées et non-structurées. Ce projet est en collaboration avec le laboratoire PRiSM et les entreprises e-XMLMedia, Elseware et Firstinvent.
Perspectives
Nos travaux futurs porteront sur deux thématiques :
• l'étape de prétraitement des données qui reste un problème difficile. Nous envisageons de le traiter en utilisant les algoritmes PSP ou ISE comme une aide à la construction de traducteur de données sources en données d'entrée des algorithmes de fouille de données.
• l'analyse de texte. Depuis septembre 2001, une collaboration a débuté avec l'équipe Langage Naturel du LIRMM pour l'application de technique de fouille de données à l'analyse de texte (Text Mining). Le but de ces travaux est dans un premier temps d'enrichir les analyses effectuées par nos algorithmes en prenant en compte la sémantique associée aux textes. Puis, il s'agira de proposer de nouvelles approches plus adaptées à ce contexte.
28
Data Warehouse
Travaux de : Z. Bellahsène
Doctorant : X. Baril Nos travaux de recherche pendant ces dernières quatre années ont porté sur :les thèmes suivants :
• adaptation de vues dans les entrepôts de données
• sélection de vues à matérialiser
• modèle de vues pour XML et développement d'un système entrepôt de données XML.
Extraction-Adaptation de vues dans les entrepôts de données
Un premier algorithme, appelé PSP, a été proposé pour la recherche de règles d'association et de motifs séquentiels. Cet algorithme basé sur une structure d'arbre préfixé s'avère particulièrement performant. Le premier travail de recherche consiste à proposer une méthode d’adaptation d’un ensemble de vues matérialisées. La première originalité de notre approche est de corréler la méthode d’adaptation au problème de la sélection de vues à matérialiser. Ces deux thèmes sont traités séparément dans les autres travaux. L’inconvénient principal de séparer ces deux problèmes est qu’en cas d’évolution (par exemple l'ajout d’une nouvelle vue) il faut reconfigurer l’entrepôt de données. Ce processus de reconfiguration est long et coûteux. Notre approche de la sélection de vues est fondée sur le partage de fragments de vues matérialisées et intègre l’évolution. L’idée clé de l’adaptation est d’utiliser l’ancienne matérialisation pour calculer la nouvelle et d’éviter l’accès aux sources de données. La deuxième originalité de notre approche réside dans le fait que l’adaptation d’une vue se fait relativement à l’ensemble des vues matérialisées et non uniquement à l’ancienne vue, alors que les autres approches effectuent l’adaptation uniquement par rapport à l’ancienne matérialisation. Nos travaux sur l’adaptation de vues ont été initiés dans le cadre d’une action concertée incitative intitulée « Evolution dans les entrepôts de données », financée par le MENRT, 1999-2000.
Sélection de vues à matérialiser
Ce thème s’intègre dans le projet REANIMATIC : Entrepôts de données évolutifs pour le suivi de patients en réanimation. Il est financé par le MENRT dans le cadre de l’action concertée incitative Télé-médecine et Technologies pour la Santé (2000-2002).
A un certain niveau d’abstraction, un entrepôt de données est un ensemble de vues. Le travail de configuration d'un entrepôt de données consiste alors à déterminer les vues à matérialiser1. Plus précisément, le problème de la sélection de vues peut s’énoncer de la façon suivante : étant donné, un ensemble de vues, un ensemble de requêtes les plus fréquemment utilisées et un ensemble de paramètres (espace disque, coût de maintenance des vues, fréquences des requêtes, fréquences des mises à jour), trouver un ensemble de vues à matérialiser qui optimisent à la fois le temps de réponse des requêtes et le coût de maintenance des vues. Or ces deux coûts sont en conflit. Nous avons défini une approche incrémentale qui tend à chercher un équilibre entre ces deux coûts et à les moduler en fonction de la fréquence des requêtes en lecture et de la mise à jour des relations sources. Par ailleurs, notre approche est fondée sur la réutilisation de fragments de vues déjà matérialisées. La recherche de fragments communs (ou sous-expressions communes) entre vues rejoint celui de l’inclusion de requêtes et permet de réduire le coût de maintenance et de stockage des données.
1 Une vue matérialisée est une vue dont les données sont calculées et stockées.
29

Développement d'un système entrepôt de données XML
Notre troisième thème de recherche concerne la gestion de données véhiculées par le Web qui ont pour propriété d'être semi-structurées. Nous nous intéressons particulièrement aux données exprimées dans le format XML qui est en passe de devenir le modèle universel d'échange de données sur le Web. Notre projet en cours sur ce thème a pour objectif de construire un entrepôt dédié à XML. Nous avons défini et implémenté un modèle de vues pour XML qui permet de spécifier des vues sur des sources de données multiples. Les données extraites sont stockées dans un entrepôt. Par ailleurs, nous avons conçu et développé une méthode de stockage de données XML dans un SGBD relationnel afin de bénéficier des performances d'un tel système.
Perspectives
Le premier thème de recherche de nos travaux futurs concerne la résolution de requêtes dans l'environnement de données semi-structurées. Le système d'entrepôt XML développé par Xavier Baril est capable de répondre à des requêtes exprimées sur l'ensemble de données stockées dans cet entrepôt. Nous comptons étendre les fonctionnalités du système afin qu'il puisse fonctionner comme un système médiateur dans lequel les vues matérialisées serviront de cache et permettront d'accélérer les requêtes. Pour ce faire, nous comptons travailler sur le problème de la résolution de requêtes dans le contexte XML, en particulier traiter le problème de résolution de requêtes en utilisant des vues. Le deuxième thème de recherche futur concerne les bases de données embarquées. Par exemple, la carte vitale en France ou les cartes de fidélité constituent des cas typiques de l'utilisation des techniques de bases de données embarquées. Les techniques développées dans les systèmes classiques ne sont pas directement applicables dans le contexte des cartes à puce à cause de leurs limitations matérielles (opérations d’écriture très coûteuse, mémoire RAM très limitée, mémoire stable très restreinte, etc.). Une base de données embarquée peut être définie comme étant un ensemble de vues matérialisées dont les données ont été calculées à partir de bases de données plus générales. La contrainte de l’espace mémoire étant très importante dans ce contexte, on ne peut envisager de matérialiser toutes les vues. Il est donc primordial de rechercher une méthode appropriée pour sélectionner les vues à matérialiser, compte tenu des contraintes de place mémoire mais aussi du temps de réponse des requêtes. Par ailleurs, il conviendrait de développer des stratégies de maintenance des données stockées car les méthodes développées dans les systèmes d'entrepôt de données classiques ne sont pas appropriées du fait de la disconnection des systèmes mobiles.
Modélisation et extraction de connaissances sur le Web
Travaux de : D. Hérin, P Pompidor, M. Sala
Doctorant : MS. Segret Nos travaux de recherche de 1998 à 2001 ont porté successivement sur la coopération entre systèmes d’informations et l’intégration de sources d’informations hétérogènes, avec la biologie comme domaine d’application, et sur la recherche dans le Web caché. Ces travaux ont été appliqués sur les domaines de réservation des voyages, la vente de livres en ligne, et l’enseignement à distance. Deux thèses ont été soutenues (F. Koriche et I. Bedou), une 3° sera soutenue au printemps 2002 (MS. Segret). Nous avons collaboré avec France Télécom, par l’intermédiaire d’un marché qui a permis de financer une bourse de thèse, avec les biologistes, par un financement d’équipement régional. Nous avons organisé deux conférences nationales : Inforsid 1998 et EGC 2002. D. Hérin a effectué une année sabbatique à l’Université de Stanford (équipe Z. Manna) de décembre 1999 à septembre 2000. Nous souhaitons participer à l’action CNRS sur le Web sémantique et aux programmes en liaison avec les SHS (Gestion et Droit).
30

Coopération entre systèmes d’information et integration de sources d’informations héterogènes
Les systèmes d’information coopératifs permettent d’intégrer des sources d’informations distribuées, bases de donnés ou systèmes à bases de connaissances, pouvant utiliser des représentations de connaissances et de données hétérogènes. Une telle coopération requiert de transformer les composants « Systèmes d’Information » en agents capables d’interagir pour résoudre un problème. Ceci est réalisé par l’ajout de spécifications appropriées à chaque système composant. Dans ce contexte, nous avons réalisé deux études : L’une sur les problèmes posés par la combinaison des connaissances issues de plusieurs sources d’informations, l’autre sur une approche de modélisation de la coopération entre systèmes d’informations, basée sur la négociation.
Combinaison des connaissances issues de plusieurs sources d’informations Ces travaux ont porté sur trois problèmes inhérents au regroupement d’informations extraites de différentes sources : l’inconsistance, l’incertitude, liée aux différents niveaux de confiance attribués aux sources d’information, et la complexité du raisonnement en présence d’un grand ensemble de connaissances regroupées. Un modèle formel a été défini, qui permet de spécifier des agents à ressources informationnelles limitées. Le modèle est basé sur le concept de raisonnement approximatif et a fait l’objet de la thèse de F. Koriche en 1998 et de plusieurs publications nationales et internationales.
Modélisation cognitive des systèmes d’information cooperatifs Ces travaux, réalisés en relation avec M. Baker, CR en sciences cognitives à l’Université Lyon 2, ont consisté à proposer, d’une part, une modélisation des systèmes d’information coopératifs, basée sur des concepts issus des sciences cognitives, les actes de langage, et d’autre part, un protocole de négociation basé sur des capacités argumentatives et explicatives. Dans l’approche proposée, les différents systèmes composants sont gérés par des agents informationnels, communiquant entre eux afin de répondre aux requêtes posées par les utilisateurs. Le protocole et la modélisation des agents ont fait l’objet du prix du « meilleur papier jeunes chercheurs » INFORSID. Le protocole visant à mettre en œuvre les aspects de négociation entre agents, a été implémenté en Java en utilisant la plate-forme MadKit développée par l’équipe Multi-Agents. Cette étude a donné lieu à la soutenance de thèse de I. Bedou en 1998, qui est actuellement Ingénieur de Recherche au MEN.
Application à la bio-informatique En collaboration avec J. Marti (UM2), nous avons réalisé la conception d’un entrepôt de données sur le transcriptome et le protéome d’une cellule. Cet entrepôt contient des données sur les expérimentations ainsi que des liens avec les différentes bases de données du domaine, accessibles par le Web.
Recherche dans le web caché
Un enjeu économique important est lié à l'accès des usagers à des données stockées dans des bases de données ou de connaissances, par l'intermédiaire de pages de type formulaires. C'est le cas par exemple des sites dédiés au e-commerce. Ces formulaires se caractérisent par la présence de zones de « saisie » et d'informations textuelles succinctes, appelées « labels », qui entourent ces zones et qui fournissent des contraintes sur les informations saisies, sur les informations extraites des bases de données cachées, et sur les informations fournies en résultat d'une requête. L'un des verrous actuels du web est la difficulté d'accéder à ces informations et par là même de découvrir à la fois les structures sous-jacentes sur le web et le contenu des informations cachées derrière ces pages formulaires. Les informations pertinentes extraites doivent ensuite être stockées de manière efficace et sécurisée, afin de pouvoir être utilisées par l'usager.
Les moteurs de recherche de type Google, travaillent essentiellement à partir de recherche de mots clés, d'analyse des liens entre pages, et mettent en œuvre des algorithmes de data mining. Notre originalité est de travailler sur l'extraction de structures sous-jacentes sur le web, en nous basant sur la sémantique et sur l'analyse des formulaires. Nous nous situons dans la mouvance des travaux autour du web caché et du « web sémantique ». Nous nous intéressons particulièrement aux travaux de recherches réalisés par l’Université de Stanford, sur l'extraction d'informations sur le web ; en particulier, les travaux autour du web caché et des formulaires (H. Garcia Molina). Notre originalité, par rapport à des projets du type TSIMMIS (J. Widom) reposent sur deux hypothèses : d'une part, nous nous intéressons à des serveurs web qui incluent à la fois des données structurées (issues de
31
bases de données) et des informations textuelles informatives et relatives à ces données, et d'autre part, nous ne connaissons pas a priori la structure des bases accédées. Coté Web sémantique, nous nous intéressons aux travaux réalisés par S. Decker.
Notre projet a été financé par un marché avec France Télécom. Nous avons retenu une approche basée sur les médiateurs (ou agents informationnels), la structure de ces médiateurs étant basée sur la description d'ontologies. Nous caractérisons un service par une ontologie sur un domaine donné (la planification d'un voyage dans notre cas), appelée ontologie globale (OG). A partir d'une OG et des pages d'un serveur écrites en XML, nous construisons une structure d'informations appelée ontologie locale (OL). Les différentes OL sont gérées comme des médiateurs. Nous avons développé un prototype, appelé Chimère, qui permet d'extraire et d'intégrer les informations issues de pages « formulaires » en trois phases :
• la construction du graphe d'enchaînement des pages et la récupération des zones de données à partir de page type « formulaires »,
• l'extraction des concepts qui relèvent d'un service donné en utilisant un dictionnaire composé de synonymes, de règles grammaticales, de locutions et de tables de conjugaisons en se référant à l'ontologie globale,
• le stockage des informations dans une base de connaissances écrite en Classic et l'exploitation de ces informations. Un module d'explication des résultats générés devrait permettre, à terme, à partir des informations récoltées sur les pages web et celles contenues dans les ontologies, d’affiner les recherches et de réviser, si nécessaire, les mécanismes utilisés.
Le prototype Chimère a fait l'objet d’une simulation sur le domaine de la gestion des voyages.
L’enseignement à distance
Nous utilisons les concepts et l’architecture développés dans le projet Chimère comme plate-forme pour l’enseignement à distance. En effet, le Web permet l’accès à des matériels d’éducation hétérogènes tels que les logiciels d’éducation (ITS) ou simplement des pages Web dont le contenu a un intérêt pédagogique. La plate-forme permet de composer des cours en utilisant les « meilleurs parties « de ces matériels d’enseignement. Cette composition repose sur une méthode d’évaluation et de révision simple mai s pragmatique qui reproduit les techniques utilisées par les enseignants lorsqu’ils composent leur supports de cours de manière incrémentale d’une année sur l’autre, en fonction des résultats des évaluations réalisées sur les éleves. Papier dans AI & Ed 1999.
Perspectives
Dans les quatre ans à venir, nos travaux porteront sur la recherche sur le Web caché et sémantique, en prenant en compte les standards autour de XML et XForms. Nos applications porteront essentiellement sur l'enseignement à distance et le commerce électronique.
32
Systèmes répartis
Travaux de : J. Ferrié, M. Cart (sabbatique 2001-2002), JF. Pons (sabbatique 2000-2001)
Collaborations : G. Canals, P. Molli (LORiA-INRIA, Nancy) Les différents travaux de l’équipe s'inscrivent dans le contexte des systèmes répartis.Ils ont pour thème central les problèmes posés par l'accès concurrent à des objets partagés, c'est-à-dire plus précisément, le maintien de la cohérence de ces objets compte tenu des accès concurrents et des risques de défaillance. Le maintien de la cohérence des objets nécessite des algorithmes spécifiques de mise à jour qui peuvent varier selon la nature des environnements (collaboratifs, coopératifs, transactionnels, mobiles). Les membres de l’équipe participent à l’animation de la communauté du GDR ARP et du GDR I3 dans le groupe de travail 2.1 (SGBD Avancés).
Cohérence des objets en environnement collaboratif
L'objectif d'un environnement collaboratif est de faciliter le travail de groupe en permettant la manipulation d'objets partagés par les membres du groupe et leur évolution de façon cohérente. Des exemples d'activités collaboratives sont : l’édition d'un document par plusieurs auteurs, la conception de plans. Dans ces systèmes, les objets sont couramment répliqués dans le but d'améliorer les performances, la fiabilité et le partage, tout en favorisant l'autonomie. Dans les systèmes collaboratifs synchrones, les objets partagés par les usagers sont en plus soumis à des contraintes de temps réel. La cohérence des copies est alors obtenue en diffusant vers les copies toute opération faite sur l'objet, et en utilisant des algorithmes qui transforment cette opération pour pouvoir l'exécuter sur l'état courant de la copie. Notre recherche passée a mis en évidence les propriétés à satisfaire pour assurer la cohérence des copies : (i) respect de l'intention de l'usager, (ii) respect de la causalité et (iii) convergence des copies. Nous avons introduit pour les satisfaire des fonctions de transposition ("en avant" et "en arrière") qui exploitent les propriétés sémantiques des opérations et qui permettent, en transformant ces opérations et en les combinant, de construire des histoires équivalentes. Les algorithmes de contrôle SOCT1 et SOCT2 que nous avons proposés, permettent d’ordonner les opérations concurrentes et par là de garantir la cohérence des copies de chaque objet. Ces résultats ont fait l’objet de la thèse de M. Suleiman (Montpellier, juin 1998) et ont été présentés aux Assises du GDR I3 (Lyon, juin 1998). Nous les avons ensuite adaptés à un environnement collaboratif réparti et mobile. Dans ce contexte, un site, en mode connecté, intègre en temps réel dans sa copie toutes les opérations réalisées sur l'objet par l'ensemble des sites. En mode déconnecté, un site n'intègre que les opérations effectuées localement. Lors du passage d'un site, du mode déconnecté au mode connecté, les opérations des utilisateurs distants sont automatiquement intégrées dans la copie de ce site, de même que les opérations exécutées localement en mode déconnecté sont intégrées dans les copies des sites distants. L'intérêt de la méthode proposée est de ne jamais avoir à annuler puis à réexécuter une opération. Ces résultats ont été présentés par J. Ferrié au congrès IEEE ICDE’1998 (Orlando, février 1998). Nos travaux récents ont permis, en collaboration avec G. Canals et P. Molli (LORIA - Inria, Nancy) de replacer ces résultats dans le cadre plus large des environnements de travail coopératifs. Cet aspect a été présenté par M. Cart à l'Ecole thématique "Documents & Evolution" du GDR I3 (Marseille, septembre 2000). D’un autre côté, nous avons reconsidéré notre algorithme SOCT2 ainsi que les principaux algorithmes de contrôle proposés dans la littérature, à savoir : dOPT, adOPTed, GOT, GOTO. En effet, leur inconvénient est d’imposer (i) ou bien que les opérations choisies par les utilisateurs satisfassent une condition, mettant en jeu les fonctions de transposition "en avant", qui est difficile à vérifier et qu’il n’est pas toujours possible d’assurer, (ii) ou bien de défaire puis de refaire des opérations dans certaines situations. Le principal objectif de notre recherche a été de concevoir des algorithmes n'ayant pas ces défauts.
33

Nous avons défini deux nouveaux algorithmes SOCT3 et SOCT4 qui, grâce à la mise en œuvre d’un ordre global continu au moyen d’un séquenceur, permettent non seulement de s’affranchir de la condition sur les transpositions mais aussi de simplifier le processus d’intégration d’une opération. Dans SOCT4, l’intégration est encore simplifiée en différant la diffusion des opérations vers les autres sites. De plus, ni la transposition "en arrière", ni la matérialisation de l’ordre causal au moyen d’un vecteur d’état n’y sont nécessaires. Ces résultats ont été présentés par J. Ferrié au congrès ACM CSCW'2000 (Philadelphie, décembre 2000).
Perspectives
L’équipe Systèmes répartis envisage de poursuivre sa recherche dans plusieurs directions, dans le cadre des systèmes collaboratifs, transactionnels et mobiles. Dans le cadre des systèmes collaboratifs, permettre aux utilisateurs d’annuler, sans restriction, des opérations qu’ils ont déjà exécutées, est indispensable. Néanmoins, cette possibilité constitue un problème difficile. L’objectif de l’équipe vise à offrir cette possibilité tout en conservant les avantages des algorithmes de contrôle qu’elle a déjà proposés. Cet aspect constitue un des thèmes de la thèse de N. Vidot, en préparation. D’un autre côté, dans les systèmes transactionnels, la mise à jour des copies multiples a fait l’objet, ces dernières années, de nombreux travaux axés sur les méthodes de propagation des mises à jour, dites paresseuses ou épidémiques. Une première synthèse en a été faite par N. Vidot (conférence à Toulouse dans le cadre du groupe de travail 2.1 du GDR I3, en mai 2000). Notre recherche tentera de voir dans quelle mesure des solutions proposées dans un environnement collaboratif peuvent être utilisées dans un environnement transactionnel. Par ailleurs, l'informatique mobile permet d'exploiter la capacité d'autonomie des sites qui peuvent continuer à fonctionner sans perte du travail effectué, tout en étant déconnectés des autres. La recherche future consistera à revoir les problèmes de synchronisation et de concurrence, pour permettre aux activités transactionnelles, coopératives et collaboratives de s'adapter au cadre de l'informatique mobile, de manière la plus transparente possible. Il s’agira plus particulièrement de substituer à la relation de causalité, des relations de dépendances entre objets, moins contraignantes pour la concurrence et qui exploitent la sémantique des opérations (par exemple, la commutativité "en arrière" ou "en avant", la recouvrabilité, la transposition "en avant" ou "en arrière", etc.).
34

Interaction Homme-Machine
Interaction Homme-Machine et Hypermedias
Travaux de : H. Betaille J. Nanard, M. Nanard, M. Hascoët (depuis octobre 2001) Doctorants : S. Fraisse, L. Moussault, F. Payet Le thème des travaux est l’interaction utilisateur-système en particulier pour la production ou la valorisation d’information hypermédia. Les directions abordées concernent la valorisation de grands ensembles d’information faiblement structurés au sein d’espaces de travail hypermédias collaboratifs personnalisables, l’étude de méthodes de conception incrémentale et de spécification de documents hypermédias permettant leur génération automatique, et enfin, l’étude, la modélisation et la spécification des aspects temporels dans les hypermédias. De façon générale, l'accent est mis sur la réutilisation, l’incrémentalité, l'utilisation d'approches à objets et la spécification par l’exemple.
Valorisation d’information multimédia au sein d’espaces de travail collaboratifs personnalisables
Travaux de : J. Nanard, M. Nanard, H. Betaille, D. Payet La valorisation de vastes ensembles de données faiblement structurées, telle l’annotation et l’indexation fine d’archives audiovisuelles, met en jeu une expertise humaine dans la mesure où l’explicitation de la sémantique de situations complexes est encore hors de la portée de traitements automatiques. Il s’agit ici d’étudier les principes de conception d’un environnement de travail collaboratif favorisant des phénomènes d’émergence de connaissances partagées lors de l’exploration humaine d’ensembles de données faiblement structurées. En termes d’IHM, l’environnement de travail doit favoriser la structuration des connaissances élaborées de façon collaborative mais anonyme. L’approche s’appuie sur la notion de point de vue. Ceux-ci caractérisent des sous-ensembles de connaissances et de règles d’usage communes à des groupes d’usagers. L’étude porte principalement sur les mécanismes de combinaison de points de vue afin de délivrer à un usager une connaissance multi-point de vue sur les documents qu’il observe. L’environnement de travail associé est développé dans le cadre du projet OPALES (appel d’offre PRIAMM du Ministère de l’industrie) fédéré par l’INA. Il a pour objectif de permettre l’indexation et l’annotation collaborative des archives vidéos de l’INA et d’autres institutions par des experts de divers domaines. Le formalisme adopté pour l’indexation est celui des graphes conceptuels. Au LIRMM, ce travail est réalisé en collaboration avec l’équipe graphes conceptuels de M. Chein (IFA). Notre équipe a conçu et réalisé l’architecture globale et l’interface, dont un interacteur spécialisé dans l’exploration de vidéos sur serveur distant.
Intéraction et environnements de conception d’hypermédias
La nécessité d’une séparation entre structure de données, dédiées principalement à la modélisation et aux traitements, et structures de présentation, dédiée à la reconstruction efficace du sens par un humain, est désormais un fait reconnu de tous. Les travaux du W3C sur XML et XSL-T en témoignent. Notre étude porte sur la démarche de spécification de la transformation d’une structure de données, en une structure de présentation. Contrairement à XSL-T qui décrit cette transformation directement à partir du modèle des données, nous abordons le problème de la spécification de la transformation à partir de la structure cible. En effet, du point de vue cognitif, le référentiel du concepteur est préférentiellement celui des documents cibles qu’il conçoit, plutôt que celui des données disponibles pour le produire. L’approche retenue est celle d’une démarche « par l’exemple » dans laquelle une maquette du document cible sert de modèle pour spécifier la transformation, et conduit à identifier des
35
patrons de conception. L’un des intérêts de cette approche est, entre autres, sa bonne adéquation à des tâches de rétro-ingénierie de documents. Nous avons étudié diverses variantes de cette approche, développé les environnements correspondants que nous avons validés sur des projets réels (réalisation de bornes pour des musées, transfert de technologie pour valorisation industrielle, application à des environnements de production de cours pour l’EAD). Ce travail a fait l’objet de la thèse de S. Fraïssé.
Etude, modélisation et spécification des aspects temporels dans les hypermédias
Travaux de : J. Nanard, M. Nanard, P. King La plupart des approches de spécification de contraintes temporelles dans les hypermédias s’intéressent à une description de faible niveau de granularité. Les langages de description multimédia tels SMIL et SVG sont dédiés à l’expression de l’exécution d’un scénario, mais ne proposent pas de support pour la démarche de conception. L’objet de l’étude est de fournir des mécanismes généraux permettant à un concepteur d’abstraire les constructions et les éléments de sa conception (patrons) afin de structurer plus facilement celle-ci et d’en réutiliser, non pas seulement des parties, mais bien des abstractions qui ont pris naissance au cours du processus de conception. Le formalisme MCF étudié dans ce travail permet de spécifier et de manipuler les abstractions (MCA) qu’un concepteur définit librement dans un scénario. La sémantique des règles de composition des MCA permet de construire un scénario par raffinements successifs et de réutiliser dans d’autres scénarios les abstractions définies. Le formalisme s’appuie sur la séparation entre les rôles (lois d’évolution d’état) permettant de définir des scénarios abstraits et les acteurs, dont l’état est altéré par la loi d’évolution des rôles élémentaires qu’ils interprètent. Un scénario abstrait ou MCA est un graphe qui exprime le parcours d’acteurs de MCA en MCA. Nous avons conçu le formalisme MCF et développé un environnement graphique permettant une spécification interactive des scénarios selon MCF. Ce travail est réalisé en collaboration avec P. King de l’Université du Manitoba, Canada.
Time awareness
Travaux de : J. Nanard, L. Moussault La thèse de L. Moussault aborde la problématique de la gestion du temps dans le cockpit d’avions, dans le contexte du projet FANSB lié à la définition de nouveaux outils prenant en compte l’évolution du trafic aérien vers une plus grande autonomie des avions et de plus grandes responsabilités des pilotes. Elle propose une modélisation de la conscience de la situation pour prendre en compte les interruptions au cours du déroulement de tâches à fortes contraintes temporelles ainsi qu’un cadre d’analyse pour la conception d’outils aidant la gestion du temps, s’appuyant sur des critères concernant l’usage de représentations multimodales. Ces travaux ont fait l’objet d’expérimentation avec des pilotes selon la méthode GEM (Group Elicitation Method).
Perspectives
L’ensemble de ces travaux appelle un prolongement pour l’étude d’environnements collaboratifs dédiés pour la conception et la production de documents hypermédias. Notre objectif est de mettre l’accent sur la génération dynamique de documents hypermédias en contexte. Deux domaines sont visés :
• les travaux dans le domaine des bibliothèques digitales, en particulier multimédias, seront développés pour la valorisation sémantique des documents.
• l’application de nos travaux à l’enseignement à distance sera développé et ciblé sur l’usager en prenant en compte les aspects temporels de la démarche d’apprentissage.
36
Dans ce contexte, les problèmes, méthodes et techniques suivantes seront étudiés :
• spécification des documents multimédias et hypermédias
• paradigme d’exploration, annotation, visualisation
• opérationalisation des patterns
• problématique et techniques d’accès universel.
Traitement algorithmique du langage
Travaux de : M. Lafourcade, J. Chauché, V. Prince (depuis oct. 2000) Doctorants : E. Standford (jusqu'en 1998), D. Schab (depuis sept. 2001)
Vecteurs conceptuels
Nous avons considéré de nouvelles structures de contrôle souhaitables pour les Langages Spécialisés pour la Programmation Linguistique (LSPL) ; il en est de même pour les structures de données. L’augmentation des performances des machines aidant, il est enfin envisageable de concevoir la manipulation de vecteurs de très grande taille et en très grand nombre. Pour ce type de vecteurs, les définitions associées à chaque mot (lemme) d’une langue peuvent être automatiquement générées à partir de thesaurus informatisés. Il est possible dans bien des cas, d’effectuer une levée automatique d’ambiguïté lexicale à l’aide de ces vecteurs. Le transfert lexical peut même s’en trouver amélioré et ce malgré une indexation monolingue. On retrouve ici les bonnes propriétés d’indépendance des systèmes à pivot. L’ensemble de l’approche a été présenté dans [Lafourcade 99]. Ces applications concernent la sélection lexicale, la traduction automatique et la recherche d’informations en contexte multilingue. Cependant, de nombreuses questions informatiques doivent trouver leur réponse. Si on considère les locutions, le nombre de vecteurs pour une langue est de l’ordre de 200.000 et chaque vecteur a une taille de l’ordre de 5ko. C’est-à-dire que pour une langue, nous manipulons un volume de donnée de l’ordre du Go. Des algorithmes de compression (sans perte d’information et avec possibilités de recherche) doivent être découverts. De plus, les techniques de recherche se basent sur des algorithmes kNN (k Nearest Neighbours) dont la complexité est linéaire, ce qui reste élevé vu le volume des données. De nouveaux algorithmes et sans doute des relations d’ordre doivent être élaborés. Un travail important a été fait sur la synonymie (Lafourcade et Prince) et l'antonymie (Schwab, Lafourcade, Prince), ainsi que sur les questions liées à l'acquisition automatique de données lexicales, leur organisation et leur relation avec les processus d'analyse. Un moteur d'indexation de document basé sur les vecteurs conceptuels a été conçus et réalisé. L'ensemble de ces travaux est accessible à <http://www.lirmm.fr:~lafourca> où ils peuvent être testés.
Dictionnaires FE*
Travaux de : M. Lafourcade Les projets de dictionnaires dans lesquels le groupe TAL s’investit visent à construire des dictionnaires des dictionnaires bilingues français-langue cible via l’anglais. Ces projets sont l’occasion d’aborder un certain nombre de problèmes liés à la création, la gestion de ressources lexicales multi-lingues. Les dictionnaires visés, sont les dictionnaires structurés, comportant des équivalents et des informations de nature linguistique d’usage humain ou machinal. Il ne s’agit pas de simples listes de
37
mots, mais de champs typés dont les informations linguistiques peuvent être, entre autres, catégorielle, logique, et sémantique (pour chaque langue cible et pour la langue source le français).
Projet FeM phase II (depuis 1998) Ce projet a permis de construire un dictionnaire trilingue Français-anglais-Malais. Cette coopération à l’origine entre le GETA, l'UTMK, l'ambassade de France et l'Institut de la Langue et de la Littérature (Dewan Bahasa dan Pustaka - DBP) à Kuala Lumpur implique maintenant le LIRMM. Ce dictionnaire a été rendu public sous forme papier (Français-Malais seulement) la 5 juillet 1996, et a été accompagné d’une forme électronique (Macintosh et PC) et sous Internet (Toile). Un CD-ROM contentant ce dictionnaire sous forme hypertextuelle a été développé par M. Lafourcade et distribué par l’Ambassade de France en Malaisie en septembre 1999. La phase II de ce projet consiste dans un premier temps à apporter les corrections nécessaires au dictionnaire aussi bien au niveau des données linguistique que des outils informatiques. Ce travail se fait sur la base des retours d’informations que nous avons reçus depuis juillet 1996. Dans un second temps, nous étudions les modalités conceptuelles et techniques de l’automatisation de son retournement.
Projet FeT (depuis 1997) M. Lafourcade a responsabilité administrative et scientifique du projet de création de dictionnaire Français-anglais-Thaï. De nouveaux enjeux sont ici identifiés. D’une part, le thaï est une langue ne s’écrivant pas avec les caractères romains et pose des difficultés au niveau du codage, des modes de transcriptions et de la gestion informatique. Cette langue ne fait pas systématiquement appel à un caractère de séparation, dont ce rôle est globalement tenu par l’espace en français. L’outil dictionnaire doit permettre d’indiquer à l’utilisateur ou se situent les frontières de mots. Ceci est nécessaire à la fois pour faciliter l’activité d’apprentissage de l’utilisateur mais aussi pour rendre utilisable la nature hypertextuelle de tel outil. Nous avons de plus à définir une stratégie de production (semi-) automatique de la transcription vers une langue cible donnée. Une transcription anglaise du thaï sera différente d’une transcription française. De plus, l’outil dictionnaire en utilisation personnelle ou à travers la Toile, ne doit pas dépendre de l’installation a priori de ressources multilingues nécessaires à la visualisation ou manipulation d’une langue non romane. La participation de M. Lafourcade au groupe " internationalisation " du consortium W3C, est un effort vers la normalisation de solutions concernant l’informatique multilingue.
Projet FeV (depuis 1998) Un nouveau projet en coopération avec l’Université de Da Nang et le laboratoire CLIPS-IMAG à Grenoble visant à la création d’un dictionnaire Français-Anglais-Vietnamien à été initié fin 1998. L’équipe TAL participe à ce projet afin de transmettre les savoir-faire élaborés lors des projets précédents.
Représentation informatique Dans les projets Fe*, le volume des données textuelles est important. Il est nécessaire de mettre au point des représentations informatique efficaces (en temps d’accès et surtout en volume physique). Ces représentations peuvent être indépendantes des langues considérées (approche physique) ou non (stockage paradigmatique). Cette problématique nous a amené à considérer le problème de la plus courte superchaine. Ce problème s’énonce simplement : étant donné un ensemble de chaînes de caractères C, calculer la chaîne S la plus courte possible, telle que chaque s de C soit infixe de S. D’apparence simple, ce problème est NP-complet et quelques groupe de recherche ont mis au point des algorithmes d’approximation. Notre perception du problème se caractérise par les données suivantes. En premier lieu nous manipulons un nombre élevé de chaînes (de l’ordre de k*100000). Ensuite, nous disposons d’information sur les types de chaînes et nous pouvons donc adopter une approche dépendant de ces données. Enfin, il nous importe de pouvoir estimer la borne supérieure de l’espace perdu. L’équipe TAL a commencé à développer de nouveaux algorithmes d’approximation pour ce problème. En particulier, nous disposons d’une version any-time (c’est-à-dire convergeant vers une solution approximative, mais dont le processus de calcul peut être interrompu). Avec F. Guinand de l’Université du Havre, nous avons élaboré un algorithme parallèle de calcul de superchaîne [GUINAND 99a]. Ce travail en coopération s’avère particulièrement fertile et va se poursuivre.
38

Silfide L’équipe TAL participe également à la partie Grenobloise du projet Silfide (CNRS & AUPELF-UREF), qui vise à mettre à disposition sur la Toile des ressources linguistiques pour la francophonie. Les dictionnaires issus du projet FeM et leur outil ont ainsi été rendus publics par le biais d’un serveur de dictionnaires.
Papillon (depuis fin 1999) Un projet international de construction coopérative de dictionnaires multilingue par acception a démarré depuis fin 1999. le projet Papillon a comme partenaires, le LIRMM, le CLISP-GETA (Grenoble), le NII (Tokyo), L'université kasetsat (Bangkok). Le groupe TAL apporte sa compétence en termes de gestion de dictionnaires informatisés, de croisement de données lexicales et de désambiguïsation par vecteurs conceptuels.
Traduction de langages artificiels
Travaux de : J. Chauché, M. Lafourcade, C. Tazine (DEA) Il est intéressant d’utiliser des LSPL dans un contexte d’informatique générale. Dans le cadre d’un projet avec IBM, nous cherchons à utiliser de tels langages afin de " traduire " des programmes d’un langage vers un autre. Dans le cas précis, il s’agit de répondre à un besoin précis concernant la conversion de requêtes (du type SQL) entre plusieurs langages.
IBM-SYGMART (1998-2000) Le projet IBM-Sygmart s'est déroulé de septembre 1998 à fin 2000. plusieurs applications de traduction ont été développées sur la site d'IBM (M. TAZINE) en partenariat avec J. Chauché.
SYGMART-carré (2001) Il s'agit d'un projet Internet de compilation et d'optimisation des grammaires SYGMART (TELESI) à l'aide de programme écrit en SYGMART. C'est la continuation logique du projet précèdent sur des considérations liées aux outils nécessaires et souhaitables pour l'analyse morpho-syntaxique.
Traduction et intégration de connaissances (ontologies et annotations)
Travaux de : M. Lafourcade, V. Prince
CTSAR (1997-1999) Le projet CSTAR cherche à analyser les problèmes liés à la réalisation d’un système de traduction de parole. On se limite à des domaines bien définis (réservation hôtelière), mais dans un contexte multilingue (anglais, français, allemand, japonais, coréen, italien). Ce projet international (CMU, ETRI, ATR, …) est représenté pour la communauté francophone par le CLIPS++ (CLIPS, LIRMM, LATL). Le texte à traduire n’est pas ici comme en Traduction Automatique, une suite continue de phrases, mais une suite de tours de parole dont l’émetteur est alternativement chacune des deux (ou plus) parties en présence dans le dialogue. Les phrases contenues dans les dialogues sont souvent incomplètes, incluent des reprises, etc. Il est aussi nécessaire de garder la mémoire de ce qui a été dit. Ce projet définit un "format d’interface" entre les participants. Ce format est syntaxiquement proche des graphes de Sowa. Il est intéressant de valider l’utilisation de LSPL afin de produire ce type de format. En effet, plusieurs types d’approches sont possibles (génération classique, remplissage de schéma, etc.). Il est possible que la manipulation directe de nouveau type de structures (des graphes et non plus seulement des arbres étiquetés) soit nécessaire afin de faciliter l’expression des phases d’analyse pour ce type d’entrée. Le projet CSTAR-II, présenté ci-dessus, pose des problèmes très intéressant et concret d’intégration de composants. Une contrainte forte imposée par le scénario utilisateur est que la coordination doit se faire " en temps réel ". Mathieu LAFOURCADE a conçu et développé le premier prototype permettant l’intégration des différents composants dont le CLIPS++ a la charge en vue de différentes démonstrations internationales. L’architecture basée sur le concept de " tableau blanc ", dispose d’un coordinateur qui orchestre les tâches de composants physiquement distribués et hétérogènes.
39

Le domaine d'application du projet CSTAR, la réservation touristique, a été décrit selon une ontologie. L'intégration de cette dernière dans le processus d'analyse est étudiée. Elle peut se faire "à la main" par l'écriture de règles similaire à celles de sysèmes experts. Ce processus est difficile. Nous étudions comment , il serait possible d'automatiser ce processus, soit par la génération automatique des règles, soit par des accès dynamiques durant l'analyse l'inguistique des informations ontologiques.
UNL (depuis 1998) Il s'agit ici dans le cadre de traduction multilingue simultanée de passer par une forme pivot (dont la syntaxe rappelle celle des graphes conceptuels). L'équipe se concentre sur l'aspect de l'analyse et de la production de tels graphes à partir de textes. la recherche de fond est celle de la correspondance entre les entités des lexiques de traductions et celles de la forme UNL. La voie explorée est celle de l'utilisation des vecteurs conceptuels afin de réduire la perplexité liée à la polysémie et aux phénomènes contrastifs. les (principaux) partenaires de ces projets sont : l'Université des Nations Unies à Tokyo, Université de Trente (Italie), Le CLIPS (Grenoble), CMU (EU), etc. Les 12 premières langues (nb locuteurs > 100 M) sont concernées.
MMA (depuis 2001) Le projet MMA (Multimédia Annotation) vise à définir un standard de description d'annotations linguistiques (GDA). Des annotations peuvent être fournies par des rédacteurs humains afin d'aider la machine lors d'un processus de traduction ou d'indexation, mais peuvent aussi être partiellement calculées automatiquement. Le LIRMM a apporté sa compétence en traitement et représentations liés à l'informatique linguistique, et plus particulièrement sur l'intégration, des vecteurs conceptuels aux annotations. Un format standard a été proposé et accepté comme inclusion au format MPEG7.
SYGMART-TRAD (depuis juin 2001) Il s'agit de la construction de règles SYGMART dans le but de générer de l'anglais à partir de l'analyse de phrases en français. La grammaire est réalisée par un ensemble de règles de transformation d'arbre. Le prototype est en cours de développement par V. Prince à partir de structures grammaticales réputées "difficiles" (règles de transformation du génitif, effacement de certains déterminants, etc.). L'objectif est d'avoir un bon "générateur lexico-syntaxique" de l'anglais avant discrimination sémantique, pour faire de la traduction automatisée.
Perspectives
Les travaux sur la recherche d’information dans l’équipe ont suscité l’intérêt de plusieurs autres organismes. Nous prévoyons, sur la période du contrat quadriennal :
• une collaboration avec le CEA et le LGI2P (Ecole des Mines d’Alès à Nimes, site EERIE) sur l’usage de nos recherches en sémantique lexicale pour l’extraction de connaissances sur le Web
• une collaboration avec l’IRIT (laboratoire d’informatique de Toulouse), en particulier l’équipe de Claude Chrisment, sur la création d’une plateforme nationale sur la recherche d’information comprenant les outils les plus performants aussi bien statistiques, qu’à base de langage naturel.
Les travaux de l’équipe concernant l’analyse du langage naturel, dans la suite de l’analyseur SYGMART développé par Jacques Chauché, se tournent vers :
• une amélioration de l’analyse du français par prise en compte des syntagmes non unitaires (ensembles de mots liés entre eux)
• le développement, à partir de SYGMART, d’un système de traduction automatique qui génère de l’anglais à partir du français analysé, qui est actuellement amorcé par V. Prince.
Deux thèses débutantes, une autour de l’amélioration du modèle vectoriel de sémantique lexicale et l’autre, en collaboration avec l’équipe « Data mining » du département ARC sur la fouille de textes, vont permettre d’étendre et d’améliorer nos outils et nos modèles. Mais compte tenu du succès
40

grandissant de ces recherches (4 publications en 2001 et une déjà acceptée pour 2002), nous nous proposons de les confronter, lors de compétitions internationales, avec d’autres systèmes de langage naturel, comme les compétitions Romanseval et Trec.
E-learning
Travaux de : M. Joab (depuis sept. 2000), C. Cabrol-Hatimi (associée)
Simulation et formation
Projet SPEP Depuis septembre 2000, M. Joab (en provenance du LIP6) poursuit ses travaux sur le thème « Simulation et Formation » . Elle collabore avec O. Auzende (LIP6, Paris 6) et M. Futtersack (CRIP5, Paris 5) sur le projet « Simulateur Pédagogique d’Entraînement de Peloton » qui fait l’objet d’un contrat industriel avec Thalès Training & Simulation (Contrat LIP6, TT&S avec sous-traitance UM2). Les travaux portent sur la conception et la réalisation d’un environnement d’évaluation des compétences stratégiques et tactiques dans le cadre d’une simulation d’un peloton de chars Leclerc. Cet environnement doit se greffer sur le poste de supervision des instructeurs associé à chacun des quatre simulateurs pleine échelle reliés en réseau. Pour l’environnement d’évaluation, nous avons adopté une architecture en trois niveaux, calquée sur les trois niveaux d’expertise, les niveaux technique, tactique et stratégique, qui permet de construire de façon incrémentale notre système. Le niveau technique est implémenté et le niveau tactique est en cours de réalisation. Le niveau technique, implémenté par des Surveillants, détecte des événements ou des états significatifs de l’exercice à partir des données circulant sur le réseau. Ces données concernent les entités (position, vitesse,..), leurs actions (tirs) et les effets sur les autres entités. Les Surveillants apportent une solution efficace pour le monitoring de l’exercice. En effet, les événements détectés par les témoins permet d’apporter un premier niveau d’aide aux instructeurs. Elle leur permet d’obtenir une trace pertinente des événements marquants de l’exercice qui pourra être exploitée également lors du « débriefing ».
Projet INRETS-LIRMM Depuis avril 2001, une collaboration s’est engagée entre M. Joab et S. Espié de l’Institut National de Recherche sur les Transports et la Sécurité (INRETS, Arcueil). Le projet porte sur l’aide à l’évaluation d’un conducteur en formation dans des situations de trafic complexe. Ce projet se situe dans le cadre de la formation sur simulateur. Une première maquette d’évaluateur a été réalisée, greffée sur un modèle de simulation multi-agents ARCHISIM. Ce projet se poursuit en 2002 par une thèse Cifre associant l’INRETS, le LIRMM et Thalès Training & Simulation. La thèse comportera deux domaines d’application : la conduite de poids lourds et la conduite de véhicule léger. Ces deux projets nous permettront de tester et de valider sur plusieurs domaines de simulation la généralité des solutions retenues.
Formation à distance
Projet SFODEM En septembre 2000, le projet SFODEM (Suivi de Formation à Distance des Enseignants de Mathématiques) a débuté à l’Université Montpellier 2. Il associe le laboratoire Etudes et Recherches sur l’Enseignement Scientifique (ERES, UM2), l’Institut de recherches sur l’Enseignement des Mathématiques (IREM, UM2), l’IUFM de Montpellier et des institutions du MEN (CRDP, Direction de la Technologie, Direction de l’Enseignement Scolaire). Il a pour objectif de former les enseignants de mathématiques du second degré à l’intégration des Nouvelles Technologies dans l’enseignement. Cette formation associe formation présencielle et formation à distance. Dans SFODEM, nous développons avec D. Guin et L. Trouche un cadre général de description des ressources pédagogiques dans le but d’aider les enseignants dans la conception de leurs propres ressources ou dans l’appropriation de ressources existantes. Par itérations successives, le cadre abstrait qui généralise la structure des ressources existantes, est expérimenté par les enseignants en formation du SFODEM, évalué et modifié en conséquence. L’implémentation en XML sera proposée à l’issue de
41

cette réflexion et pourra être intégrée à une plateforme d’enseignement à distance. Cette recherche se situe dans le cadre des actions en cours sur la normalisation des objets pédagogiques (IEEE, AFNOR).
Projet « Apprentissage colloboratif supervisé » Aujourd’hui, à l’image des jeux en réseau, la communication via le WEB permet d’envisager de nouvelles modalités d’enseignement, que l’apprenant travaille seul ou en groupe, sous la supervision d’un enseignant ou de manière autonome. Les plates-formes d’enseignement à distance disposent de peu d’outils de travail coopératif pour les apprenants et de moyens de supervision pour les enseignants. Depuis octobre 2001, M. Joab et C. Cabrol-Hatimi travaillent sur l’apprentissage collaboratif supervisé dont l’objectif est de concevoir et de réaliser des outils intelligents de coopération (pour les apprenants) et de supervision (pour les enseignants) adaptés à l’enseignement “en réseau”.
42
Objets et agents
Systèmes Multi-Agents
Travaux de : J. Ferber, F. Koriche, J. Quinqueton, R. Terrat (associé) Doctorants : P. Bommel, J.Chapelle, Y. Hamadi, O. Gutknecht, F. Michel, O. Simonin Associés : Ph. Reitz, J.-D. Ruvini L’équipe SMA s’intéresse à tous les aspects des systèmes multi-agents : modèles d’agents et d’organisations, formalisation de l’action et du raisonnement dans un environnement incertain et changeant, simulation multi-agent, CSP distribué et calculs émergents. Les travaux ont plus particulièrement porté sur les points suivants :
• organisations dans les SMA : le projet Aalaadin et le modèle, Agent/Groupe/Rôle, les architectures d'agents, analyses (ascendantes, descendantes) dans les SMA.
• architectures et concepts pour la simulation multi-agents.
• modèles formels d'agents : algorithmes anytime, attribution/révision de croyances, théorie de l'action.
• calculs dans les SMA : CSP distribués, parallélisme, calculs émergents. L’équipe est très présente sur le plan national et internationale : noeud du réseau d’excellence AgentLink et de MLNet2, membres des comités de programmes ATAL, ICMAS, JFIADSMA, SAB. Elle a d’autre part plusieurs contrats en cours avec plusieurs institutions et entreprises françaises et européennes : contrat CoMMA (programme IST) dans le cadre du Réseau National Informatique et Génomes, contrat CIT avec le CNET, contrat Constellation avec le RNRT.
Projet AALAADIN : organisation dans les SMA
Travaux de : O. Gutknecht, J. Ferber, F.Michel AALAADIN est un projet qui porte sur l’analyse, la conception, la formalisation et la réalisation de systèmes multi-agents à partir d’une perspective organisationnelle. Le modèle conceptuel sous-jacent (AGR) est fondé sur les notions d’agents, de groupes et de rôles, un SMA étant vu comme un ensemble de groupes d’agents interconnectés par l’intermédiaire d’agents appartenant à plusieurs groupes. Ce projet s’exprime selon quatre dimensions :
La dimension méthodologique Nous avons développé une méthodologie à partir des concepts AGR qui s’exprime de manière complémentaire aux méthodologies classiques (UML par exemple) ou centrées sur l’agent [Gutknecht et Ferber 99]. Il s’agit d’un « framework organisationnel », un cadre méthodologique volontairement partiel et complété par des modèles externes.
La dimension formelle Le problème de la dynamique des groupes dans AGR a été entièrement formalisé en termes de pi-calcul, un calcul algébrique très utilisé pour définir la sémantique des processus concurrents. Nous avons pu ainsi donner un cadre formel aux notions d’agents, de groupes et de rôles.
La dimension architecturale Un environnement de développement, Madkit, écrit en Java, implémente les concepts AGR et permet d’écrire des applications directement avec ce modèle. De plus, Madkit utilise pour son propre fonctionnement ce modèle, permettant d’écrire des extensions au système grâce à la réflexivité de l’architecture. Madkit est disponible en ligne.
43

La dimension applicative Les modèles AGR et Madkit sont utilisés dans de nombreux domaines d’application : biologie, simulation multi-agents, acquisition de connaissances. Plus d’une vingtaine d’équipes en France travaillent sur ce domaine. Une convention de recherche CNET a permis d’évaluer la pertinence des solutions agents pour la réalisation d’applications de télécommunications. Dans le futur, nous nous proposons d’analyser la composante « normative » des organisations artificielles en travaillant sur les problèmes de droits et de devoir des agents.
Architectures pour les simulations multi-agents et modélisation de systèmes complexes naturels et sociaux
Travaux de : F. Michel, O. Gutknecht, P. Bommel, J. Ferber Les systèmes multi-agents sont de plus en plus utilisés dans les sciences de la vie et de l’environnement pour leur possibilité de représenter directement les différents acteurs biologiques, sociaux et économiques, leurs comportements et leurs interactions. Malgré leur intérêt, ils soulèvent plusieurs problèmes. Un problème important porte sur la définition d'un modèle « sans biais », c'est-à-dire d’un modèle permettant effectivement d’assurer au modélisateur que l’outil informatique implémente bien le modèle que le modélisateur a décrit (on ne s’intéresse pas ici au problème de l’adéquation entre le modèle et la réalité qui est un problème de modélisation), et que les conséquences observée lors de la simulation sont bien directement des conséquences du modèles et non le produit d’un comportement non désiré du système informatique. L’un des biais les plus courant correspond au problème de la simultanéité des actions : les simulateurs existants ne savent pas bien prendre en compte des actions simultanées. Ainsi, deux agents qui, dans le modèle, devraient agir en même temps, vont être animés l’un après l’autre dans la simulation. Le problème n’est pas seulement technique, il est aussi théorique : il a nécessité le développement d’une théorie de l’action, le modèle « influence/réaction », une extension du calcul situationnel, qui permet de décrire des comportements simultanés d’action. Une architecture de simulation de systèmes multi-agents fondée sur ce principe a été réalisée.
Projet « Modélisation de systèmes complexes naturels et sociaux » Cette recherche s’effectue en collaboration étroite avec l’équipe TERA/ERE du CIRAD Montpellier, ainsi qu’avec l’équipe Objets et Composants du LIRMM (T. Libourel) dans le cadre du développement d’un projet portant sur la modélisation de systèmes complexes naturels et sociaux. Nous travaillons ainsi directement, pour tout ce qui touche à la partie multi-agents, avec F. Bousquet, C. Lepage et JP. Müller. Cette recherche donnera lieu, entre autre, à la réalisation d’un outil de simulation intégré à Madkit.
Méthodes Multi-agents appliquées aux problemes de robotique collective avec forte hétérogénéité
Travaux de : O. Simonin, J. Chappelle, J. Ferber Note : Ce travail a été réalisé en collaboration avec l’équipe de robotique d’Alain Liégeois du LIRMM. Les robots, envisagés pour les applications non manufacturières (exploration et travail en milieux hostile nucléaires, planétaires, sous-marins, déminage, applications en milieux agricoles et forestiers, etc.) doivent être des machines intelligentes dotées de grandes capacités d’adaptation, d’auto-organisation et d’auto-apprentissage. Ces machines sont équipées de capteurs proprioceptifs et extéroceptifs, de moteurs et de systèmes de traitement des informations et de commande automatique correspondants.D’autre part, le domaine des systèmes multi-agents (SMAs) qui propose des solutions distribuées aux problèmes complexes et dynamiques, s’est considérablement développé ces toutes dernières années, pour devenir un thème de recherche à part entière. L’importance de ce thème devrait encore s’accroître dans les années à venir tant l’adaptation fait partie du cœur des caractéristiques des SMAs.
44
Il existe plusieurs formes de systèmes multi-agents. On distingue les architectures d’agents réactives, délibératives ou hybrides. Dans les systèmes réactifs, le problème est traité localement par chaque agent et la résolution globale est obtenue par auto-organisation et coopération. A l’opposé, les systèmes hybrides ou délibératifs basent leurs techniques de résolution et d’apprentissage sur des communications de haut niveau. Enfin, il existe aussi tout un ensemble de recherches dans lesquelles les agents forment des groupes qui sont en compétition et qui tentent d’obtenir le meilleur gain en fonction de l’adversaire.
Le travail actuellement mené propose un modèle d’agent basé sur une architecture réactive et des communications par émission de signaux. Le problème de la sélection d’actions, ainsi que la gestion des interactions entre agents, sont gérés par une fonction d’état de satisfaction. Cette satisfaction étant elle-même décomposée en trois sous-satisfactions : personnelle (progression de la tâche courante de l’agent), interactive (réaction aux actions des agents voisins) et coopératives (fonction de la satisfaction des autres agents).
Le modèle de combinaison vectorielle est utilisé pour calculer les actions menées par les agents dans l’environnement. Il permet ainsi de combiner des tâches de haut niveau avec des tâches élémentaires comme l’évitement d’obstacles. Les signaux émis par les agents sont leur niveau de satisfaction interactive. Ainsi, nous avons défini le comportement altruiste d’un agent comme étant un nouveau vecteur répondant aux signaux émis. Les agents sont alors capables de sélectionner ou de combiner en temps réel ce vecteur altruiste pour effectuer des tâches coopératives et améliorer la navigation des agents.
Des robots ont été réalisés au LIRMM et ont été équipés de ce modèle d’architecture pour gérer la coopération entre robots. Les résultats actuels montrent une bonne performance de ce modèle et une utilisation possible dans le cadre de flottes d’agents mobiles devant travailler en coopération. Ce travail a fait l’objet de la thèse d’O. Simonin soutenue en décembre 2001.
Calcul emergent et conception pour les applications spatio-temporelles
Travaux de : Y. Hamadi, A. Kias, J. Quinqueton en collaboration avec P. Reitz et J.D. Ruvini Cet axe de recherche est constitué de travaux plutôt prospectifs portant sur les paradigmes non classiques de calcul, comme le calcul distribué ou le calcul émergent. Le cadre des systèmes multi agents est particulièrement fécond pour ce type de recherche. Un travail sur les problèmes de satisfaction de contraintes distribués (thèse soutenue en 1999) nous a conduit à mettre en évidence des limites théoriques nouvelles sur la difficulté des problèmes polynomiaux comme la consistance d'arc, lorsqu'ils sont traités de façon distribuée. Ces travaux font suite au travail de thèse mentionné et sont conduits en relation avec le projet Coconut. Nous avons également exploré la mise en œuvre de ce type de paradigme sur des architectures nouvelles de machines, comme les architectures reconfigurables. Nous avons également contribué à l'animation de la communauté francophone dans le domaine des architectures matérielles reconfigurables, et la revue TSI a consacré un numéro complet à ce sujet. Nous nous sommes également intéressés aux paradigmes de calcul pouvant être qualifiés d'émergents, notamment à la lumière de nos travaux sur la résolution distribuée de problèmes, ainsi que sur les résultats principaux des réflexions menées au sein du groupe de travail sur l'émergence, dans le cadre duquel ont été élaborés des modèles relativement précis de ce qui est émergent et ce qui ne l'est pas (ce qui n’est qu’un simple effet componentiel). Le rôle du niveau émergent dans l'explication causale du phénomène a notamment été illustré positivement et négativement, sur quelques problèmes de résolution distribuée. Ce panorama serait incomplet sans citer un travail récent de réflexion sur l'émergence de conventions sociales dans les systèmes multi-agents, et le rôle des agents apprenants dans ce phénomène. Cette réflexion, menée suite aux travail de thèse de Jean David Ruvini (soutenue en octobre 2000) sur le sujet, permet d'entrevoir des applications intéressantes de cette approche pour la constitution et la gestion de mémoire d'entreprise, qui est l’objet du projet européen CoMMA auquel nous participons.
45
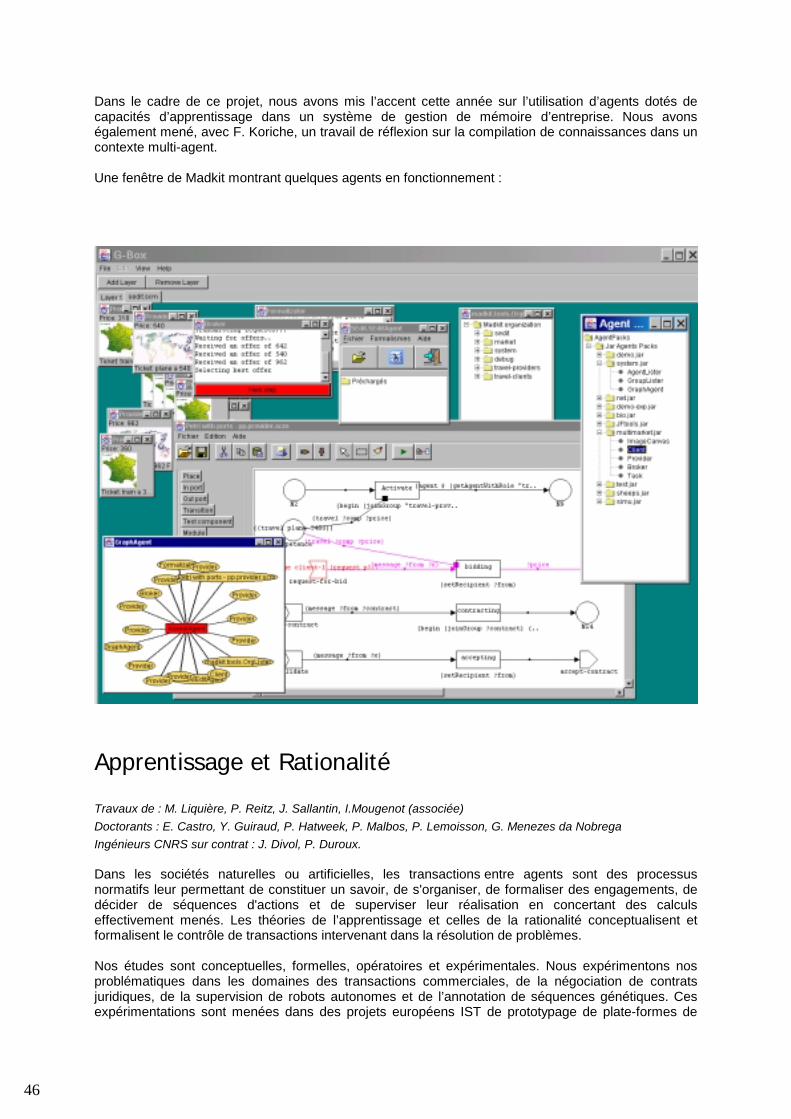
Dans le cadre de ce projet, nous avons mis l’accent cette année sur l’utilisation d’agents dotés de capacités d’apprentissage dans un système de gestion de mémoire d’entreprise. Nous avons également mené, avec F. Koriche, un travail de réflexion sur la compilation de connaissances dans un contexte multi-agent. Une fenêtre de Madkit montrant quelques agents en fonctionnement :
Apprentissage et Rationalité
Travaux de : M. Liquière, P. Reitz, J. Sallantin, I.Mougenot (associée) Doctorants : E. Castro, Y. Guiraud, P. Hatweek, P. Malbos, P. Lemoisson, G. Menezes da Nobrega Ingénieurs CNRS sur contrat : J. Divol, P. Duroux. Dans les sociétés naturelles ou artificielles, les transactions entre agents sont des processus normatifs leur permettant de constituer un savoir, de s'organiser, de formaliser des engagements, de décider de séquences d'actions et de superviser leur réalisation en concertant des calculs effectivement menés. Les théories de l’apprentissage et celles de la rationalité conceptualisent et formalisent le contrôle de transactions intervenant dans la résolution de problèmes. Nos études sont conceptuelles, formelles, opératoires et expérimentales. Nous expérimentons nos problématiques dans les domaines des transactions commerciales, de la négociation de contrats juridiques, de la supervision de robots autonomes et de l’annotation de séquences génétiques. Ces expérimentations sont menées dans des projets européens IST de prototypage de plate-formes de
46

commerce électronique et d’annotation des séquences génétiques. Des prototypes plus amont sont développés avec BNP-Paribas et DGA systèmes complexes.
Apprentissage à partir d’objets structurés
Les Treillis de Galois ont de bonnes propriétés formelles et conceptuelles lui donnant la capacité de fournir une base théorique pour les méthodes de fouille de données. Nous avons généralisé cette approche aux objets structurés. Fort de ce résultat, nous pouvons maintenant trouver, à partir d’exemples décrits via un graphe, des règles de la forme A->B où A et B sont des graphes. Toutefois la complexité intrinsèque du modèle demande des méthodes d’élagage du treillis. M. Latourrette a formalisé la notion d’opérateur de généralisation dans le cas où la catégorie des exemples à généraliser est un espace convexe. Un dépôt de brevet (0102524, 23février 2001) « assistance au choix d’un produit dans un catalogue de produits » a été réalisé avec France Telecom. Ces recherches sont menées par M. Liquière, P. Hatweek et M. Latourrette.
Rationalité et supervision de systèmes complexes
Des théories de la Rationalité sont développées en Philosophie, en Droit, en Economie et Finance, en Psychologie, en Logique mais encore peu en Informatique. Elles portent sur un processus-dialectique de formation de théories permettant de prédire et d’expliquer. Ces théories intègrent naturellement les théories de l’apprentissage ainsi que celles du contrôle de systèmes complexes naturels et artificiels composés d’agents dotés d’une certaine autonomie.
Théorie de la rationalité En postulant que les Théories Scientifiques se formalisent dans une théorie axiomatique, les études conceptuelles sur la rationalité posent des cadres généraux régissant la supervision par des scientifiques des processus de construction interactive d’un état stable des connaissances fondées sur une théorie axiomatique. Nous avons dégagé un procédé appelé « phi-calcul » dont l’intérêt théorique et pratique est maintenant démontré en Droit des Contrats. Ce procédé intègre les mécanismes d’apprentissage de correspondance de Galois. Nous avons publié une première formalisation de cette démarche. Cette étude est menée en collaboration avec le Centre de Droit de l’Entreprise de l’Université Montpellier I et la société d’Avocats Fidal (dépôt de brevet) dans le cadre du projet IST MKBeem. En postulant que les théories axiomatiques invalides se signalent par la production de crises et de conflits, nous avons engagé une recherche préliminaire et interdisciplinaire d’appréhension des notions de Crises, Conflits et Transactions avec le département de Philosophie de Montpellier III et de Bordeaux II, le département d’Anthropologie d’Evora et l’Université Catholique de Brasilia. Ces études sont réalisées par G. Nobrega, J. Sallantin, J. Divol et E. Castro.
Modèles algébriques pour la supervision de systemes complexes Les formalismes de la rationalité font intervenir la Théorie des Jeux, les Logiques d’ordre supérieure et la Théorie des Catégories. Nous avons un projet de recherche d’une Sémantique Algébrique permettant une approche unifiée de ces formalismes de manière mieux appréhender la supervision de systèmes complexes naturels et artificiels. Cette étude est menée en collaboration avec le Laboratoire Géométrie-Topologie et Algèbre (UMR 5030) : D. Guin, P. Elbaz-Vincent, A. Preller, D. Luzeaux, DGA/DCE/Centre Technique d'Arcueil. Deux thèses en mathématiques co-dirigées MRS et DGA-CNRS, un projet DGA/CNRS « Méthode algébriques pour la supervision de systèmes complexes » et un séminaire Math-Info (CATégorie et IA), sont en cours sur ce domaine.
Simulation et supervision de système complexes Notre collaboration avec le CIRAD et l’INRA dans le cadre du groupe de travail régional SMAS nous a conduit à développer des outils pour modéliser des problèmes écologiques comme des sociétés d’agents agissant dans un monde. Fondamentalement, l’état instantané de ce monde est représenté par l’état instantané de la mémoire d’une machine parallèle, l’évolution du monde se ramenant à l’étude du programme s’exécutant sur cette machine. Un agent est alors un programme agissant sur une partie finie de la mémoire, cette dernière dépendant totalement de la structure de voisinage (espace et temps) de la mémoire. Nous étudions la possibilité de construire semi-automatiquement
47

ces agents à partir de comportements attendus. Le modèle privilégié de notre étude est un automate cellulaire, dont il s’agit de construire par apprentissage la fonction de transition. Ces recherches sont menées P. Reitz et P. Malbos en collaboration avec F. Gruau du LRI.
Modélisation et simulation interactive Le lien entre modélisation et simulation est bidirectionnel : le modèle permet de définir le simulateur, lequel doit permettre, à partir des observations faites sur les traces, de réviser le modèle. Dans le domaine des transactions électroniques, ces modèles sont formulés par une ontologie partagée par les vendeurs et acheteurs. Nous retrouvons le thème de recherche récurrent de notre équipe, la révision de modèles : rationalité et interaction. Nos études portent sur un environnement informatique permettant de modéliser et simuler des systèmes complexes, i.e. des systèmes décomposables impliquant un grand nombre de composants en interaction, et dont la dynamique n'est prévisible que par simulation. Les terrains d'application sur lesquels nous expérimentons notre démarche sont le commerce électronique (projets IST), l’annotation des séquences génétiques ORIEL (projet IST) et l'agriculture (collaboration avec les départements AMIS et TERA au CIRAD). Ces recherches sont menées par P. Reitz, I. Mougenot, P. Duroux et J. Divol.
Nos transferts scientifiques et industriels ont donné lieu à 2 dépôts de Brevets. Transactions électroniques : Deux projets européens IST MKBeem et Smart-ec. Partenaires industriels français sont : Euriware, la société d’avocats Fidal/KPMG et BNP-Paribas. Enseignement à distance : Accord de collaboration avec le Brésil Capes Cofecub. Annotation des séquences génétiques : Projet IST Oriel et plus anciennement un accord de partenariat avec Euriware pour la conception de serveurs intelligents.
48

Raisonnement anytime
Travaux de : F. Koriche Le "raisonnement anytime" est un paradigme utilise dans de nombreux secteurs de l’intelligence artificielle pour traiter les problèmes de grande complexité. Ce paradigme étend la notion classique d'agent rationnel en lui permettant de retourner un ensemble de réponses approximatives a une requête donnée. Dans le cadre de la formalisation du raisonnement anytime, nous présentons un modèle logique base sur les propriétés suivantes :
• notre logique est sémantiquement fondée sur la notion de ressource, une mesure de précision, qui reflète a la fois la qualité et le coût calculatoire des approximations.
• le raisonnement est incrémental : la qualité des approximations est une fonction croissante des ressource dépensées. Ainsi les approximations peuvent être améliorées et converger vers la solution exacte.
• le raisonnement est dual : l'agent peut retourner a la fois des approximations correcte, mais non complètes, et des approximations complètes, mais non correctes.
Cette année, nous avons examine le modèle logique sous trois points :
• approximation du raisonnement propositionnel,
• approximation du raisonnement sur les ensembles maximaux cohérents.
• approximation du raisonnement en ordre un. Notre objectif actuel est de "distribuer" le raisonnement anytime dans le cadre des systèmes multi-agents. L'idée est de décomposer de manière "anytime" un problème en plusieurs sous-problèmes qui seront résolus par les agents selon leur ressources disponibles.
E-Dialogues
Travaux de : S.A. Cerri Doctorants : D. Maraschi, A. Gouaich Ingénieur CNAM : P. Wittman Notre recherche se situe dans les technologies de l'information appliquées au Web ; elle détermine comment les processus de communication sont en prise avec le contrôle d'un calcul distribué sur le Web. En effet, si le calculateur est distribué sur le Web, les calculs engagés dans la résolution de problèmes complexes font intervenir le contrôle en singularisant un agent humain ou artificiel face à la communication qui intervient avec et entre les autres agents. Nous appelons e-Dialogues, les processus de communication sur le Web entre des agents Humains et Artificiels. Nous étudions les e-Dialogues d'un point de vue théorique, expérimental et appliqué en leur donnant comme fondement les concepts fondamentaux dégagés en philosophie dans la théorie des actes de langage. Sur cette base, nous distinguons selon les objectifs de la communication, trois classes principales de dialogues : la conception, l'information et l'apprentissage. Chaque situation concrète de dialogue articule ces caractéristiques de ces trois classes. Notre thème de recherche établit des inter-relations fortes avec la programmation (fonctionnelle, objet et par agent), les systèmes d'information sur le Web et l'apprentissage. Les applications portent sur les environnements pour la e-programmation, la e-recherche d'information et le e-apprentissage, le e-commerce étant considéré comme un domaine combinant ces derniers.
49

Conception et E-dialogue
Environnements et langages pour l'intégration de logiciels sur le Web Cette étude porte sur la conception, réutilisation de composants de logiciel sur le Web dans le contexte de construction de logiciel conversationnel. Le projet de recherche porte sur l'acquisition à la volée de connaissance à partir de pages Web que l'utilisateur glane sur le Web avec des moteurs de recherche. Un démonstrateur basé sur le stockage dynamique de page Web a été fait pour le projet européen LARFLAST. Dans le contexte de la réutilisation de serveurs multimédia, une application de ces environnements et outils permet de transformer un cours d'enseignement à distance sur CD.ROM en un serveur interactif. Un éditeur Web (le premier disponible à notre connaissance) a aussi été développé grâce aux architectures et outils logiciel sorti de cette direction de recherche. Cet éditeur est utilisé couramment par d'autres chercheurs au LIRMM et ailleurs. Ces projets sont menés par D. Maraschi et P. Wittman en collaboration avec Cap Gemini et avec le soutien de la région Languedoc-Roussillon.
Conversation et reflexivité La réflexivité est un sujet difficile initié par Brian Smith (3-Lisp) et Patty Maes (3-KRS) . Tout comportement intelligent doit inclure une réflexivité et un raisonnement à un méta niveau. Toutefois les recherches antérieures ont introduit la réflexivité comme étant donnée par les propriétés de programmes (3-Lisp) ou d'objets (3-KRS) . Nous envisageons d'introduire la réflexivité comme venant des comportements conversationnels des composants engagés dans une résolution de problèmes. Le projet de thèse d'A. Gouaich porte ainsi sur l'auto-description de systèmes ouverts en vue de la définition à la volée de services. Ce travail est soutenu par Motorola.
Information et E-dialogue
Négociation de contrat dans le cadre du phi-calcul La notion de contrat est centrale dans le commerce et le sera dans le e-commerce car chaque dialogue cherche à établir un accord. Dans les développements actuels du e-commerce, beaucoup d'applications se concentrent sur la production d'ontologies décrivant sans ambiguïté des systèmes complexes (produits ou services) dans les langages disponibles sur le WEB (XML, XSL, programmation par Agent). Leur objectif est de gérer l'échange de messages entre les parties en négociation. Dans le projet phi-calcul de l'équipe rationalité et apprentissage, la notion de contrat est reformulée avec des notions mathématiques bien définies comme celles de fait, d'exemple de théorème, lemme, etc. Un outil interactif appelé Web-contract a été développé dans le dessein d'assister un utilisateur dans le processus de développement d'une ontologie. Selon l'adage que « tout ce qui se comprend s'énonce clairement », un accord prend forme quand son ontologie est partagée. Les assertions, les questions et les conseils sont gérés par le Phi-calcul sans que soient définis de réels actes conversationnels car ils désignent des types de transactions qui ne sont pas encore les constituants de flots de messages. La thèse d'E. Castro intègre la méthodologie du Phi-calcul et le Modèle STROBE proposé par S. Cerri. Un démonstrateur montre l'intervention de la notion de conversation dans l'évaluation d'expressions en Scheme . Notre objectif est de parvenir à intégrer dans une unique plate-forme les avancées des projets sur le dialogue, la rationalité et l'apprentissage. Cette étude menée par E. Castro est soutenue par la société Euriware.
Apprentissage et E-dialogue
Construction interactive de théories et apprentissage humain Le phi-calcul a été conçu pour assister une personne à établir de la cohérence d'une connaissance lors d'un processus interactif de construction de connaissances. L'utilisateur est placé devant un miroir rationnel qui lui renvoie un reflet de ses actions raisonnées. Une incohérence signalée suscite une réaction raisonnée de l'utilisateur. Ces réactions s'intègrent dans une interaction dialectique aiguillée par les outils dégageant le type des incompréhensions, ambiguïtés et paradoxes intervenant lors du dialogue. Deux articles soumis portent sur deux aspects de l'apprentissage humain dans ce contexte : assister l'apprentissage opportuniste d'un élève lors d'une navigation libre, assister l'utilisateur à l'aide d'un miroir rationnel à expliciter des concepts difficiles. Cette étude menée par G. Menezes da Nobrega est soutenue par le programme Franco Brésilien CAPES COFECUB.
50

Formalisations : langages de communication entre agents
Les recherches décrites peuvent être vues comme visant une sémantique opérationnelle des langages de communication entre agents (ACLs). Elles sont une conséquence des travaux sur le modèle STROBE. Ce modèle utilise les notions d'évaluation retardée et d'environnement de première classe pour modéliser les communications entre agents cognitifs humains et/ou artificiels, en plus que le typage dynamique et les abstractions de données à type explicite pour modéliser les documents balisés du Web. Ces concepts architecturaux descendent directement d'une vision fonctionnelle (lambda calcul) concrétisée par le langage SCHEME. Le pas suivant, qui a été maintenant choisi pour formaliser le nouveau langage C+C = Communication and Control qu'on veux développer dans l'équipe soit comme langage Web soit comme langage Multi-agents (voir la publication 2000 sur C+C), est d'en développer une sémantique dénotationnelle à coté de la sémantique opérationnelle (interpréteurs). Ces aspects formels vont accompagner pas à pas les aspects expérimentaux et applicatifs dans les prochaines années, aussi bien dans les thèses que dans les projets européens.
Objets pour les composants logiciels et les bases de données
Travaux de : C. Boksenbaum, C Dony, T. Libourel
Doctorants : D. Bardou, S. Coulondre, J.D. Ruvini, L. Spéry L'équipe "Modèles et langages pour les composants logiciels et les bases de données à objets" s'est créée en 1998 et s'intéresse aux évolutions des modèles, des méthodes de conception, des langages de programmation, des bases de données et des environnements de développement à objets pour la production et l'utilisation de composants logiciels fiables et réutilisables. Nous travaillons de façon duale, en unissant des connaissances et des savoir-faire, sur la modélisation par objets et sur les langages et les environnements de programmation par objets. Les membres de l'équipe sont membres actifs des GDR ALP (comité de direction, participation au pôle Objets et Composants), I3 et SIGMA (comité de direction, pôles Systèmes d'information géographiques, méthodologies et applications). L'équipe a participé et participe à divers projets et programmes de recherche internationaux (Programme Alliance), nationaux (projets RNRT - ARES et RNTL - MACAO, en collaboration avec l'équipe RPO du département IFA du LIRMM) et régionaux (projets avec le CEMAGREF et le CIRAD, projet IA2 Composants). L'équipe participe activement à la diffusion de la recherche via l'organisation d'évènements nationaux ou internationaux journées (Journées CASSINI'2001 "Géomatique et Espace Rural"2, Journée AGI "Architectures génériques"3) ou workshops (workshop ECOOP'2000 "Exception handling in object-oriented systems"), via la responsabilité de comité de programmes (LMO'2000), via la participation à des comités de programmes (BDA, Cassini, Inforsid, LMO,OCM) et via la participation à des comités de rédaction (Techniques et Sciences Informatique, Revue Internationale de Géomatique). Quatre thèses issues de nos travaux de recherche ont été soutenues dans l'équipe entre 1998 et 2001.
• D. Bardou sur « Etude des langages à prototypes, du mécanisme de délégation, et de son rapport à la notion de point de vue ».
• L. Spéry sur « Historicité et mise à jour de données géographiques : Application au cadastre français »
2 www.cassini2001.teledetection.fr/ 3 www.lirmm.fr/~dony/agi.html
51

• S . Coulondre sur « Un modèle pour les objets persistants avec rôles ».
• Jean-David Ruvini sur "Assistance à l'utilisation d'un environnement interactif : apprentissage des habitudes de l'utilisateur"
• Enfin, dans le cadre du projet RNRT et de la collaboration ARC-IFA, nous avons participé à l'encadrement de la thèse de H. Leblanc sur "Sous-hiérarchie de Galois : Un modèle pour la construction et l'évolution des hiérarchies d'objets" (responsable M. Huchard).
Tous les projets résumés ci-après ont fait l'objet de publications internationales et nationales et sont également validés par des outils logiciels disponibles sur Internet.
Découpage modulaire : rôles et points de vue
Travaux de : S. Coulondre, T. Libourel , C. Boksenbaum et de D. Bardou et C.Dony
Modéliser ou représenter les différents rôles qu'un objet ou un composant sont capables de jouer ou les différents points de vue selon lesquels on peut les considérer est devenu un sujet d'étude central. Les points de vue permettent de mettre en œuvre de nouveaux schémas de modularité et d'introduire une plus grande souplesse dans la réutilisation des composants. Deux projets ont étudié la modélisation et la programmation d'objets avec points de vue :
• le premier était une étude relative aux langages de programmation et a fait entre autres l'objet du travail de thèse de D. Bardou. Il propose un modèle d'objets avec points de vue, basés sur le partage de propriétés et le mécanisme de délégation.
• le second concernait les SGBD Objets. Les travaux ont porté sur l'introduction de rôles de manière déclarative au sein des classes et ont abouti à un modèle de rôles unifié et complet pour les objets persistants. Ce projet a fait, entre autres, l'objet du travail de thèse de S. Coulondre. Tous les aspects de ce modèle sont implémentés dans un prototype nommé SAMOVAR, réalisé au-dessus du SGBD O2 (voir http://www.lirmm.fr/ coulondr).
Assemblage de composants logiciels
Travaux de : C. Dony, T. Libourel ,en collaboration avec M. Huchard et H. Leblanc (LIRMM-IFA), N. Chevalier, M. Dao (CNET) et T. Brunel (LIRMM-STI)
Le projet "assemblage de composants logiciels" a été mené entre 1997 et 2000 dans le cadre d'une convention de recherche RNRT avec le CNET. Ce projet se poursuit depuis 2000 dans le cadre d'une convention RNTL (projet Macao) sous la responsabilité de M. Huchard (IFA). Il traite de la manipulation automatisé, notamment de l'assemblage, de hiérarchies d'héritage (UML et LPO). Ces hiérarchies sont la pierre angulaire des applications objet; elles sont composées de classes et sont utilisées aussi bien en bases de données, en programmation ou en classification. Une des applications principales du projet est la restructuration de hiérarchies de grande taille et initialement conçues sans souci de réutilisabilité.
Conception de composants métiers pour les systèmes environnementaux
Travaux de : S. Coulondre, T. Libourel, L. Spéry, en collaboration avec I. Mougenot (LIRMM-ARC), J.P. Cheylan (UMR Espace), C. Claramunt (Trent University), S. Lardon ( INRA SAD), M. Passouant ( CIRAD), A. Miralles et P. Maurel (CEMAGREF). Nous travaillons depuis plusieurs années, et notamment dans le cadre du programme international ALLIANCE, sur la conception et à l'évolution des composants utilisables dans les systèmes environnementaux et plus particulièrement dans les systèmes d'information géographiques (SIG) qui intéressent de nombreux laboratoires montpelliérains : INRA, CEMAGREF, CIRAD, UMR Espace, IRD. Les problèmes fondamentaux auxquels nous nous sommes intéressés sont par exemple l'intégration de concepts spatiaux et temporels dans les ateliers de génie logiciel dédié au SIG et l'intégration des méta-données dans les projets liés à la création ou à la consultation de catalogues. Ainsi, la collecte, la représentation et le suivi de l'évolution de données hétérogènes ainsi que la mise à la disposition d'information via des supports numériques divers ou via le Web sont au coeur de la
52

thèse de L. Spery (co-encadrée avec J.P. Cheylan - CR CNRS UMR Espace) qui a proposé un environnement de travail et une méthodologie complète architecturée autour du concept de méta-données. Par ailleurs, l'intégration de la dimension spatiale et de la dimension temporelle dans les SIGa été traitée dans le projet PSIG "Dynamique spatio-temporelle" mené en collaboration avec J.P. Cheylan et S. Lardon. Enfin, les aspects « collaboratifs » pour la conception de SIG ont été traités dans le cadre du projet international "Alliance".
Environnements adaptatifs de développement
Travaux de : C. Dony, J.D. Ruvini, en collaboration avec J. Quinqueton et P. Reitz En même temps que la réutilisation par utilisation de composants logiciels, se développe l'idée de réutilisation des efforts des développeurs via l'utilisation d'environnements de développement évolués capables de l'assister voire de générer du code à partir de l'observation de son comportement. Le projet APE (Adaptive Programming Environment), traite de l'assistance à un utilisateur humain ou à un programme informatique en train d'exécuter une tâche de type réactif ou interactif, i.e. une tâche où l'opérateur exécute des suites d'actions en réponse à une situation ou à des informations qu'il reçoit. APE, réalisé par J-D. Ruvini dans le cadre de sa thèse, est à la fois un environnement adaptatif et un système de programmation par l'exemple. APE est structuré autour de trois agents logiciels : un observateur observe l'utilisateur, un apprenti apprend, grâce à un algorithme dédié, ses réactions face aux situations typiques qu'il rencontre, un assistant propose d'aider l'opérateur à chaque fois qu'une situation reconnue par l'apprenti se présente. APE est opérationnel et librement accessible (voir www.lirmm.fr/~ruvini).
Fiabilité des composants : gestion des exceptions
Travaux de : C. Dony en collaboration avec J. Ferber Ce dernier sujet relate les travaux initiés le plus récemment dans l'équipe. Les systèmes de gestion des exceptions pour la programmation par objet ont été conçus dans les années 80 et 90. Ils ne permettent pas de traiter correctement les nouveaux problèmes liés à l'interopérabilité, à la distribution, à la répartition et n'intègrent pas la notion de composant assemblable ou de composant distribué. Le workshop organisé à ECOOP avait pour but de répertorier les nouveaux problèmes et les nouveaux travaux traitant de façon globale de la réalisation de composants fiables et résistant aux erreurs. Nous avons abordé le problème de la gestion des exceptions en milieu distribué via une collaboration avec l'équipe SMA dans laquelle nous avons travaillé à un système de gestion des exceptions pour agents proactifs.
53

Rapport d’activité du LIRMM 1998-2001
Département IFA Informatique fondamentale
et applications
Responsable : Jean-Claude BajardAdjoint : Olivier Gascuel


Personnels du département (au 31.12.01)
Enseignants-chercheurs
Ahronovitz Ehoud Maître de Conférences UMII Ahronovitz Yolande Maître de Conférences UMII Bajard Jean-Claude Professeur UMII Berry Vincent Maître de Conférences UMII Boé Jean-Marie Maître de Conférences UMIII Bordat Jean-Paul Maître de Conférences UMII Caraux Gilles Professeur ENSAM Chein Michel Professeur UMII Cogis Olivier Professeur UMII Dicky Hervé Maître de Conférences UMII Ducournau Roland Professeur UMII Fiorio Christophe Maître de Conférences UMII Habib Michel Professeur UMII Huchard Marianne Maître de Conférences UMII Janssen Philippe Maître de Conférences UMII Jean-Marie Alain Professeur UMII König Jean-Claude Professeur UMII Melançon Guy Professeur UMIII Mugnier Marie-Laure Maître de Conférences UMII Philippe Fabrice Maître de Conférences UMII Preller Anne Professeur UMIII Simonet Geneviève Maître de Conférences UMII Vilarem Marie-Catherine Professeur UMII Vismara Philippe Maître de Conférences ENSAM
Chercheurs CNRS
Bessière Christian Chargé de Recherche (HDR soutenue en 1999) Gascuel Olivier Directeur de Recherche Imbert Laurent Chargé de Recherche Paul Christophe Chargé de Recherche Rivals Eric Chargé de Recherche
Chercheurs associés au LIRMM
Aubert Jean-Pierre Maître de Conférences UMII Berthé Valérie Chargé de Recherche CNRS IML Marseille Laurenço Claude Directeur de Recherche CNRS CCIPE Montpellier Meynard Michel Maître de Conférences UMII Pinloche Sylvie Ingénieur de Recherche CNRS Génopole de Montpellier Vilarem Jean-François Maître de Conférences UMII
Post-doctorants
Baget Jean-François ATER UMII Ceroi Stephan ATER Marseille I Lanlignel Jean-Marc ATER UMII Bryant David Biomath. Research Center Nouvelle-Zélande McKenzie Andrew Université de Canterbury Nouvelle-Zélande
57
Thèses en cours Début
Alemu Tigist Bourse gouv. étranger octobre 2000 Ardourel Gilles MESR octobre 1999 Berard Séverine MESR + monitorat octobre 2000 Berasaluce Sandra MESR octobre 1999 Bennouas Toufik Bourse gouv. étranger octobre 1999 Boudon Frédéric CIRAD + Région LR + LIRMM octobre 2000 Bouklit Mohamed MESR + monitorat octobre 2001 Caderas de Kerleau Ch. CIFRE octobre 2000 Calas Yvan MESR + monitorat octobre 2000 Cros Hervé MESR octobre 2000 De Mezzo Benoît CIRAD octobre 2001 Guindon Stéphane Bourse Bioinformatique Irlande Alexis ATER octobre 1998 Jourdan Fabien UM1 - MESR octobre 2001 Maestre Arnold MESR octobre 2000 de Montgolfier Fabien Allocation couplée octobre 2000 Nicolas François MESR octobre 2001 Palaysi Jérôme MESR octobre 1999 Petit Thierry CIFRE octobre 1998 Ranwez Vincent MESR+ monitorat octobre 1998 Roume Cyril Contrat industriel octobre 2000 Tognetti Yannic MESR puis ATER octobre1998
Thèses soutenues
1998 Financement Devenir Berry Anne ATER Maître de Conf. Clermont Ferrand Debruyne Romuald MESR Maître de Conf. EM Nantes Nock Richard MESR Maître de Conférences Martinique Paul Christophe MESR CR CNRS Pelenc Stéphane CNET Ingénieur IBM
1999 Amilhastre Jérôme MESR Ingénieur ACCESS Toulouse D'Andrea Gilles MESR Ingénieur ILOG Sophia Duroux Patrice MESR Ingénieur sous contrat LIRMM
2000 Bernon Jean-Luc Entreprise Ingénieur Industrie USA Ceroi Stéphan Allocation couplée ATER Marseille Fagot Christophe MESR Ingénieur AgentWorks Montpellier Genest David MESR Maître de Conférences Angers Leblanc Hervé ADER Maître de Conférences EM Nantes Pavillet Gabriel MESR Ingénieur C3T Montpellier Raynaud Olivier MESR Maïtre de Conf. Clermont Ferrand Nourine Louhari Professeur Clermont Ferrand (HDR)
2001 Baget Jean-François MESR ATER UMII Brehelin Laurent MESR Post-doc Canada Chemouny Stéphane Bourse Cirad Postdoc Cirad Montpellier Damiand Guillaume MESR ATER Poitiers Lanlignel Jean-Marc Allocation couplée ATER UMII Rico Fabien MESR ATER Paris Thierry Eric Allocation couplée Postdoc INRIA UK
58

Introduction générale
Le département d'Informatique Fondamentale et Applications (IFA) se compose de 5 chercheurs CNRS (1 DR CNRS, 4 CR CNRS) et 24 enseignants chercheurs (10 PR, 13 MCF, 1 PR émérite), auxquels il faut ajouter 5 chercheurs associés ( 1 DR CNRS, 1 CR CNRS, 3 MCF) et 28 étudiants en thèse ou venant de la soutenir (ATER, post-doc). De plus, nous profitons de la présence de chercheurs étrangers qui viennent collaborer avec des membres du département pour des séjours allant de un mois à un an. Les axes forts de nos travaux de recherche sont la modélisation, l'algorithmique, la complexité et la programmation. Ils nous permettent de traiter avec rigueur et efficacité des problèmes concrets liés à d'autres sciences ou apportés par des industriels. Les thématiques du département d'Informatique Fondamentale et Applications s'articulent autour de quatre groupes d'activité qui se concrétisent par des groupes de travail et des participations à des actions communes. Graphes et Réseaux
• Algorithmique de graphes • Optimisation et modélisation des réseaux
Nombres Images Mots • Arithmétique des ordinateurs • Combinatoire énumérative • Imagerie combinatoire
Méthodes et Algorithmes pour la Bioinformatique • Analyse de séquences • Phylogénie
Connaissances Objets Contraintes • Représentation de connaissances par des graphes • Systèmes à contraintes • Représentation par objets • Informatique et Chimie
Les thématiques du département d'Informatique Fondamentale et Applications sont reconnues par la communauté internationale (membres de comités de pilotage, présidences de comités de programme, éditeurs de numéros spéciaux, invitations...). Certaines, comme l'algorithmique des graphes et des ordres ou encore la bioinformatique, sont des références mondiales. De plus, suite aux recrutements de ces dernières années, d'autres thématiques émergent et commencent à bénéficier d'une même renommée. Nos collaborations avec d'autres disciplines sont nombreuses : modélisation informatique de la synthèse chimique, imagerie combinatoire appliquée à la médecine et à l'agronomie, opérateurs cryptographiques, physique statistique, programme GRID... Des collaborations soutenues existent entre certains thèmes et des industriels comme en programmation objet, représentation des connaissances, ou contraintes.
59
Bilan 1998-2001
Durant ces quatre années, le département s'est renforcé de nouveaux chercheurs : trois chargés de recherche CNRS, trois professeurs de l'Université de Montpellier 2 dont un issu du détachement INRIA, d'un directeur de recherche, un professeur et un maître de conférences de l'Université de Montpellier 3. Un maître de conférences de l'université de Montpellier 2 recruté en octobre 2001 doit nous rejoindre en janvier 2002. Vingt-deux thèses et deux habilitations à diriger des recherches ont été soutenues pendant cette période.
1998 1999 2000 2001 Thèses et HDR 5 3+1 7+1 7 Revues 6 9 19 15 Ouvrages 5 3 9 5 Conférences avec actes 18 31 31 31
Tableau récapitulatif des principales publications Les chercheurs du thème Algorithmique de Graphes (2 PR, 2 MCF, 1 CR) se sont illustrés avec des développements algorithmiques de reconnaissance de graphes et de structures ordonnées (treillis). Ils ont mis en place des codages et représentations efficaces et compactes de graphes et d'ordres. Ils ont étudié pour EDF les algorithmes de remise en service du réseau secondaire. Ils sont membres d'une action INRIA «Soleil levant» et d'un projet Franco-Brésilien. Dans leurs travaux les membres du thème Optimisation et Modélisation des Réseaux (2 PR, 1 MCF 2002) né suite à l'arrivée de deux nouveaux professeurs, s'intéressent aux communications de groupe, au routage optique ainsi qu'aux modèles dynamiques stochastiques de réseaux. Ils participent à des actions mises en place par le ministère : ACI Grid, action spécifique sur programme (ASP) du MENRT sur l'Approximabilité et la Recherche Locale (coordinateur : E. Bampis). L'effectif du groupe Nombres Images Mots ( 2 PR, 5 MCF, 1 CR CNRS) a doublé au cours de ces quatre dernières années. Les travaux développés s'articulent autour de la combinatoire ainsi que sur des modèles de représentation. Le thème le plus ancien est l'Imagerie Combinatoire où les chercheurs utilisent des cartes topologiques et cartes combinatoires pour modéliser des objets pouvant être issus d'images segmentées. Ils collaborent avec des services médicaux (CHU Lapeyronie), des instituts agronomiques (CIRAD, CEMAGREF), ainsi qu'avec les roboticiens du LIRMM (action JemSTIC du CNRS). Les membres du thème Arithmétique des Ordinateurs étudient les représentations des nombres et les algorithmes associés. Ils ont développé des méthodes d'évaluation des fonctions élémentaires, ainsi que des algorithmes sur des systèmes modulaires. Enfin, le plus jeune des thèmes de ce groupe est Combinatoire Enumérative où sont développées des activités en combinatoire des mots, visualisation de graphe et modélisation de systèmes quantiques. Les travaux de ce thème ont attiré l'attention du département STIC du CNRS qui a retenu leurs projets pour deux actions : AS STIC et JemSTIC. Les chercheurs du thème Méthodes et Algorithmes pour la Bioinformatique (1 DR, 1 CR, 1 PR, 1 MCF) abordent divers aspects de l'informatique de la biologie : algorithmique du texte, statistiques, probabilités, classification, analyse de données, reconnaissance de formes, apprentissage, inférence grammaticale, modèles de Markov cachés... Ce large spectre les amène à collaborer avec d'autres thèmes du département. Le but de ces travaux est de modéliser l'évolution des espèces, des génomes, faire de la recherche d'homologie, de signaux, de données d'expression (puces à ADN). Ils gèrent de nombreuses actions : action «Informatique, Mathématique et Physique pour la Génomique» (30 équipes, 500 chercheurs), AS-STIC «Algorithmes pour la bioinformatique», Génopole Montpellier, projets InterEPST Bioinformatique. Les travaux du thème Représentation de Connaissances par des Graphes (1 PR, 1 MCF) sont basés sur les graphes conceptuels, et les modèles de raisonnement à base de graphes. Le but est de
60

développer des systèmes à base de connaissances, et de faire une recherche pertinente d'information, dans un cadre formalisé. Ils ont développé un logiciel efficace COGITANT qui est actuellement utilisé pour de la recherche bibliographique, dans le cadre du projet MOGADOR avec l'ABES. Ils participent à OPALES, un projet avec l'INA en collaboration avec le département ARC du LIRMM. Systèmes à contraintes (1 PR, 1 MCF, 1 CR) est un thème proche de l'intelligence artificielle où sont développés des algorithmes et des heuristiques pour la résolution de problèmes de satisfaction de contraintes (CSP). Ses chercheurs abordent aussi des problèmes sur-contraints où il faut gérer l'expression des préférences et la gestion de l'incohérence. Ils traitent ainsi des problèmes de gestion de ressources, d'optimisation... Ils participent au projet COCONUT commun aux départements ARC et IFA, travaillant sur les modèles de raisonnement utilisant les agents, la logique et les contraintes. Ils collaborent aussi avec des chercheurs espagnols au sein d'une action intégrée Catalogne/Languedoc. Les membres du thème Représentation par objets (1 PR, 3 MCF) s'intéressent à des problèmes liés aux objets et à la classification : sémantique de la spécialisation, construction et mesures de hiérarchies. Ils ont étudié les systèmes de contrôle d'accès statique et les exceptions dans la modélisation objet. Certains travaux sont destinés à intégrer un Atelier de Génie Logiciel, d'autres sont utiles pour la compilation des langages à objets. Ils participent à des projets comme "Assemblage de composants logiciels" ARC-IFA (CTI France Télécom. R&D), et MACAO, label RNTL, avec France Télécom R&D et SOFTEAM (éditeur d'OBJECTEERING) en collaboration avec le département ARC du LIRMM. Enfin, le thème Informatique et Chimie (1 DR associé, 1 MCF) utilise de nombreux concepts étudiés au sein de notre département. Ses membres participent à un travail sur la synthèse de molécules, mené en collaboration avec le thème Représentation par Objets, le département ARC et l'entreprise SANOFI. Ils gèrent le projet ENCORE (ENcyclopédie de Chimie ORganique Européenne).
Perspectives pour 2002-2006
Le département d'Informatique Fondamentale et Applications souhaite consolider ses groupes de travail afin de mieux profiter des savoir-faire des nouveaux entrants formés ailleurs. Il vise également à maintenir l'orientation de nos travaux vers des applications en élargissant ses collaborations à d'autres domaines scientifiques, avec des industriels notamment. Les membres du thème Algorithmique de graphes vont poursuivre leurs recherches sur les graphes dynamiques et tout particulièrement sur le graphe du Web au sein de l'action INRIA «Soleil levant». Leur projet Franco-Brésilien de coopération continue encore deux ans et ils prévoient la mise en place d'un projet Franco-Canadien. En Optimisation et Modélisation des Réseaux, ils se proposent d'étudier l'intégration de l'analyse stochastique à leurs travaux sur l'algorithmique sur les communications de groupe et le routage optique. Les travaux sur le contrôle des réseaux s'intensifierant grâce au rapprochement avec le projet MISTRAL de l'INRIA. L'enjeu est de mettre en place des applications permettant l'établissement de contrats de qualité de service entre utilisateurs et opérateurs de réseaux. Au sein du groupe Nombres Images Mots, les membres du thème Arithmétique des Ordinateurs qui participent depuis un an à un groupe de travail avec des mathématiciens du LAGT et des microélectroniciens du LIRMM, comptent renforcer cette collaboration en mettant au point des opérateurs originaux pour la cryptographie en étudiant les systèmes de représentation des objets mathématiques manipulés. En Combinatoire Enumérative les chercheurs comptent poursuivre leur travail sur la visualisation de données complexes, au sein des diverses actions auxquelles ils participent (AS STIC et JemSTIC). Ils espèrent aussi renforcer leurs travaux sur la combinatoire des mots. En Imagerie Combinatoire, les travaux s'orientent vers la modélisation 4D qui est un des challenges de l'imagerie médicale : modélisation des organes déformables en activité. Dans leurs perspectives, les membres du thème Méthodes et Algorithmes pour la Bioinformatique pensent intensifier leurs recherches sur les méthodes combinatoires de classification et les puces ADN. L'analyse des données d'expression et l'étude des séquences répétées qui représentent des grands enjeux de la bioinformatique, vont prendre une place importante dans leurs travaux. D'autre part, ils continuerons d'assurer leurs rôles d'animateurs de la recherche en bioinformatique.
61
Les chercheurs du thème Représentation de Connaissances par des Graphes espèrent dans les années qui viennent, se renforcer d'un chercheur. Ils comptent développer leurs travaux sur la recherche documentaire en particulier au sein des projets en cours. De plus il reste dans ce domaine, de nombreux problèmes ouvert à résoudre. En Systèmes à Contraintes, ils comptent d'une part poursuivre leur action Coconut, et renforcer leur participation aux divers groupes de travail du département. Les membres du thème Représentation par Objets envisagent l'étude de la réorganisation de hiérarchies ainsi que le mise au point d'un compilateur de langages objets en collaboration avec le projet Miro de l'INRIA. Ils poursuivront leurs activités en collaboration avec le thème Informatique et Chimie.
62
Algorithmique Combinatoire
Permanents : JP. Bordat, O. Cogis, M. Habib, L. Nourine, C. Paul, G. Simonet Doctorants : T. Bennouas, M. Boulkit, JM. Lanlignel, F. de Montgolfier, E. Thierry Post-doctorants : S. Ceroi, O. Raynaud Associé : D. Corneil (Toronto)
Contexte des travaux
Notre domaine de recherche est celui de l'algorithmique des structures discrètes (graphes, ordres...) Pour ce faire, nous envisageons deux approches complémentaires. La première est l'étude structurelle des objets combinatoires manipulés (par exemple, la recherche de schéma de décomposition, d'ordre d'élimination...) Elle permet l'expression de nouveaux invariants, de nouveaux paradigmes pour les algorithmes étudiés. La seconde approche concerne la mise au point de structures de données puissantes et surtout simples à manipuler, à mettre à jour... Nous espérons ainsi mettre au point des algorithmes qui soient efficaces (complexité optimale) tout en restant simples (facilement programmable). C'est à dire que les résultats peuvent aussi bien être l'amélioration de la complexité connue pour un problème que la simplification d'algorithmes existants.
Thèses soutenues en 2001
• M. Lanlignel, Autour de la décomposition en coupes, juin 2001
• E. Thierry, Sur quelques interactions entre structures de données et algorithmes efficaces pour les ordres et les graphes, octobre 2001.
Modifications de l'équipe
• Départs : L. Nourine et O. Raynaud ont été nommés en septembre 2001 respectivement professeur et Maître de Conférences au LIMOS à Clermont-Ferrand
• Arrivée : C. Paul a été recruté en octobre 2001 en tant que Chargé de Recherche CNRS.
Projets et Collaborations
• ARC avec l'INRIA, Soleil Levant
Cette action de collaboration avec l'INRIA Rocquencourt et le LIAFA (Université Paris 7), dont le responsable est L. Viennot, a débuté en décembre 2000. Son objectif est l'étude d'algorithmes pour les graphes dynamiques. L'exemple le plus typique de tels graphes est le graphe du WEB. Il s'agit donc de gérer des graphes très grande taille d'une part et qui évoluent dans le temps d'autre part. Une connaissance globale à instant donné n'est donc pas possible.
• Projet Franco-Brésilien CAPES-COFECUB, Structures et Algorithmes en Théorie des Graphes
Participent à ce projet le LaBRI (Université Bordeaux 1) et le Leibnitz (Université de Grenoble) du côté Français, et l'Université Fédérale de Rio de Janero et l'Université de Fortaleza du côté Brésilien. Ce projet réunit donc des chercheurs issus de 2 communautés voisines mais légèrement différentes : théorie des graphes (graphes parfaits notamment) d'une part et algorithmiciens d'autre part.
63

Principaux résultats
Techniques de décomposition de graphes
Une étude globale sur différentes techniques classiques de décomposition de graphes (décomposition modulaire, décomposition en coupe, largeur de clique, \dots) a été menée. Elle a permis d'établir des ponts importants entre ces techniques qui devraient permettre une généralisation des algorithmes connus à des techniques de décomposition plus sophistiquées. Par exemple, le rôle de la décomposition en coupes dans le problème de la reconnaissance des graphes de largeur de clique au plus 3 a permis l'élaboration d'un algorithme polynomial pour ce dernier problème. Enfin des propriétés des graphes sans coupe sont mises en évidence. Il faut noter que l'étude de l'ensemble de ces techniques de décomposition est au coeur des travaux menés sur la conjecture des graphes parfaits. Par ailleurs, des algorithmes linéaires pour la décomposition modulaire des graphes orientés ont pour la première fois été explicitement présentés. Un nouveau type de décomposition concernant les graphes bipartis a été proposé. Les algorithmes associés sont à l'étude. L'algorithme de reconnaissance des cographes sans construction de l'arbre de décomposition a une nouvelle fois été simplifié de sorte qu'il est désormais très raisonnable d'envisager sa généralisation à la décomposition modulaire et surtout au calcul de l'orientation transitive d'un graphe. Ces résultats constitueraient les premiers algorithmes linéaires simples à mettre en oeuvre.
Schémas d'élimination dans les graphes
Un paradigme classique de l'algorithmique de graphes repose sur l'utilisation de schémas d'élimination. L'idée étant de présenter à un algorithme les sommets d'un graphe dans un ordre spécifique de telle sorte qu'il soit possible de calculer à la volée certains paramètres. L'apport provient alors de l'amélioration éventuelle de complexités connues ou de la simplification d'algorithmes existants. Par exemple, plusieurs invariants de graphes (y compris certains dont le calcul est connu pour être NP-difficile) sont calculables de manière gloutonne dans les graphes distance héréditaire si on utilise un schéma d'élimination caractéristique de cette famille. C'est notamment le cas du calcul du diamètre, d'un stable de poids maximum ou d'un séparateur de poids minimum. Pour les graphes quelconques, il est possible de définir la notion de schéma d'élimination moplexien en montrant qu'il correspond à la notion de triangulation minimale et en établissant un rapport étroit avec un arbre de cliques du graphe triangulé obtenu. Le calcul efficace d'un tel schéma est un problème algorithmique intéressant.
Géométrie et combinatoire
Nous nous intéressons à l'impact des représentations géométriques des graphes dans le cadre de la résolution de problèmes d'optimisation sur ces graphes. Par exemple si l'on sait qu'un graphe est le graphe d'intersection de rectangles du plan, il est peut-être plus facile d'en calculer une clique maximale; en ce qui concerne l'allocation de fréquences en téléphonie mobile, on assimile la zone d'influence d'un émetteur à un disque et le problème de l'affectation des fréquences se ramène à un problème de coloration du graphe d'intersection, pour lequel le fait que ce graphe soit un graphe d'intersection de disques permet d'obtenir des heuristiques efficaces. Nous avons obtenu un algorithme "robuste" pour le calcul d'une clique maximum d'un graphe d'intersection de translatés d'un convexe du plan, sans utiliser explicitement la représentation géométrique. Un algorithme est dit robuste pour une classe de graphes, s'il fournit une solution optimale lorsque le graphe appartient à la classe, et lorsque la donnée n'est pas dans la classe, soit il donne une solution optimale, soit il répond que le graphe n'est pas dans la classe.
64

A l'heure actuelle nous possédons très peu d'exemples de tels algorithmes, et c'est un magnifique sujet de recherche, initié par J. Spinrad (Nashville, USA) au colloque SODA SIAM/ACM en 2000.
Codages et représentation compactes de structures discrètes
La mise au point de codages (ou représentations compactes) permettant de répondre efficacement à des requêtes de diverses natures est une problématique qui apparaît dans de nombreux domaines. L'exemple le plus simple concernant les graphes est sans doute celui de la représentation des relations d'adjacence : quelle est la quantité d'information minimum nécessaire pour tester l'adjacence entre 2 sommets dans un graphes ? On peut demander à ce que le test s'effectue en temps constant ou du moins le plus efficacement possible. Le codage peut être global (matrice d'adjacence par exemple) ou distribué (une étiquette est associée à chaque sommet et le test pour deux sommets donnés n'utilise que les étiquettes correspondantes). Pour la première fois une étude comparative est menée sur un grand nombre de codages d'ordres partiels permettant de répondre à des requêtes du type : un élément est-il comparable à un autre ? Elle a permis de mieux comprendre ce problème, en particulier de mieux évaluer les performances de ces différents codages, et aussi d'en proposer de nouveaux. Des résultats concernant le codage distribué des distances dans un graphe ont aussi été obtenus pour de nombreuses familles de graphes et plus généralement pour les graphes quelconques en utilisant des techniques de décomposition de graphes. A chaque fois, les distances peuvent être calculées en temps constant à partir des étiquettes associées aux sommets.
Ensembles ordonnés
Nous avons exploité l'idée d'ordres colorés proposée par L. Nourine afin d'obtenir un théorème général de représentation des treillis à la Birkhoff. Ce théorème à des conséquences algorithmiques importantes en matière de génération de treillis.
Perspectives
De nombreux algorithmes, notamment ceux liés à la décomposition de graphes, ont été obtenus grâce à la technique de l'affinage de partition basée sur une structure de données très simple mais qui s'est toujours révélée très efficace. Il serait intéressant d'essayer de fusionner cette structure de données avec d'autres (par exemple celle utilisée pour le problème de l'union-find} afin d'élargir encore ses applications. De plus nous souhaitons nous impliquer davantage dans la problématique des algorithmes dynamiques et du graphe du WEB. Deux thèses sont maintenant en cours sur ce sujet. Un projet d'action locale de collaboration (COLOR) avec l'INRIA Sophia-Antipolis ayant pour objectif d'étudier les aspects dynamiques des réseaux d'interconnexion a été accepté. Ce projet implique aussi l'équipe Optimisation et modélisation des réseaux.
65

Optimisation et modélisation des réseaux
Permanents : A. Jean-Marie et J.C. König (depuis sept./oct. 1999). Doctorants : A. Irlande (soutenance en 2001), J. Palaysi (depuis sept. 1999), T. Alemu (depuis sept. 2000), Y. Calas (depuis sep. 2000).
Contexte des travaux
Ce nouvel axe de recherche a été créé à la suite de l'arrivée dans le laboratoire d'un professeur et d'un directeur de recherche INRIA détaché à l'université de Montpellier II. Notre but est d'accompagner l'évolution technologique et fonctionnelle des réseaux en participant à la résolution des nouveaux problèmes qui y apparaissent: quels protocoles pour assurer une garantie de service dans les réseaux à commutation de paquets? comment y organiser les communications multipoints ? comment organiser le routage dans les futurs réseaux entièrement optiques? Les outils que nous utilisons pour aborder ces questions proviennent d'une part de la théorie des graphes et de la théorie de la complexité algorithmique, et d'autre part de la théorie des files d'attente. Nous obtenons ainsi une évaluation des performances des différentes stratégies de communication aussi bien qualitative (optimalité) que quantitatives (qualités de service). Il est ainsi possible de proposer des structures (par exemple, des sous-réseaux logiques) permettant des communications à la fois satisfaisantes pour les utilisateurs et économiques pour l'administrateur du réseau.
Principaux résultats obtenus en 1999, 2000 et 2001
Ci-dessous le compte rendu de résultats dans quelques-uns des thèmes abordés.
Communications de groupe
Le problème de l'arbre de Steiner consiste à trouver un arbre couvrant un sous-ensemble de sommets d'un graphe ayant un coût minimal. Ce problème très étudié, modélise naturellement le problème de trouver une structure de communication pour un groupe de processus dans un réseau (par exemple, une application de vidéo-diffusion). C'est un problème NP-complet et nous avons développé des heuristiques qui permettent non seulement d'avoir des arbres de faibles coûts mais aussi de petits diamètres (ce paramètre traduisant par exemple la qualité de service en terme de latence). Plus précisément ces heuristiques permettent de garantir un coût et un diamètre au plus à un facteur constant des valeurs théoriquement optimales. Nous avons également établi des bornes inférieures des meilleures garanties de performances possibles pour ce problème. Enfin, nous avons démontré des résultats de NP-complétude concernant l'existence d'arbre approchant les deux paramètres à des constantes données. Dans un second temps, nous avons étudié des propriétés incrémentales des heuristiques afin d'y intégrer les aspects dynamiques. En effet, la plupart des groupes sont amenés à évoluer (ajout ou retrait de processus). Dans ce cadre nous avons étudié la dégradation de la qualité d'une solution en fonction de ces événements ou le coût de la conservation d'une solution de qualité donnée.
Routage tout optique
La complexité de nombreux problèmes d'affectation de longueur d'onde dans le cadre du routage WDM a été trouvée. Notamment dans le cadre des grilles et des tores, la NP-complétude a été établie
67
pour de nombreux types d'instances et des algorithmes polynomiaux approchants ont été trouvés dans le cas d'instances quelconques.
Communications hiérarchiques
L'affectation des différentes parties d'une application aux ressources ou processeurs afin d'obtenir une exécution rapide est un problème délicat dès que l'on veut modéliser plus ou moins finement le réseau de communication. Nous avons ainsi étudié les réseaux hiérarchiques sur lesquels certains processeurs communiquent rapidement entre eux et d'autres pas. Sur ce modèle simplifié (les communications rapides sont de durée négligeable et les lentes de durée unitaire), nous avons trouvé des bornes inférieures et supérieures non triviales à la garantie de performance que l'on peut espérer d'une heuristique en fonction de divers paramètres (taille des groupes de processeurs, nombre de processeurs...).
Théorie des jeux
L'évolution actuelle des réseaux tend vers l'établissement de contrats de qualité de service entre utilisateurs et opérateurs de réseaux, ceux-ci entrant en compétition pour satisfaire la demande. Egalement, les différents grands utilisateurs (prestataires de service Internet, par exemple), entrent en compétition pour les ressources du réseau (le débit, notamment). La théorie des jeux, issue de l'économie, est susceptible de pouvoir décrire ces interactions et les situations d'équilibre auxquelles elles mènent. Dans le cadre de cette théorie, nous avons étudié le problème des conjectures et des anticipations des joueurs (agents), et avons montré, dans des modèles statiques ou dynamiques, que les prendre en compte pouvait conduire à des situations plus efficaces pour chacun des joueurs, dans le sens ou l'utilité qu'ils retirent de cette situation est plus grande que dans le cas de l'équilibre de Nash, situation standard utilisée dans la théorie.
Perspectives à quatre ans
Dans le cadre de communications de groupe, nous pensons que les bornes supérieures et inférieures déjà obtenues peuvent encore être améliorées. De même pour la maîtrise des phénomènes dynamiques liés à la gestion d'un groupe. Plus ambitieuse est notre volonté de généraliser les résultats de Menger (cas des communications point à point) pour les rendre applicables aux communications de groupe. La plupart des résultats obtenus jusqu'à maintenant sur la garantie de performance des différentes heuristiques portent sur des pires cas. La question est alors de savoir analyser le comportement réel des protocoles que nous proposons. Ce type de connaissance est nécessaire pour déterminer le coût des différents services et qualités de service et pour imaginer des solutions efficaces pour gérer les différents trafics partageant un même réseau. Pour ce genre d'étude, il sera nécessaire d'intégrer des techniques algorithmiques et stochastiques d'analyse de performances. Enfin, nous prévoyons la continuation de recherches précédentes ou en cours sur l'évaluation quantitative de l'efficacité de certains protocoles particuliers des réseaux : l'utilisation de codes correcteurs d'erreurs, les algorithmes de prévention de la congestion dans l'Internet, et également le contrôle de la distribution de flux vidéo.
68

Combinatoire des mots et combinatoire énumérative
Permanents : J-M. Boé, G. Mélançon (septembre 2000), F. Philippe (septembre 2000) Associée : V. Berthé (IML) Les membres de ce thème appartiennent au groupe «Nombres, Images et Mots» créé en 2001 au sein du département IFA.
Contexte scientifique
La combinatoire des mots est un axe de recherche que nous développons depuis le recrutement de G. Mélançon en septembre 2000, ainsi que depuis l'arrivée de F. Philippe, J.-M. Boe et de V. Berthé en tant que chercheur associé. Un groupe de travail hebdomadaire s'est organisé autour de cette thématique. Il s'agit d'étendre au cadre Multidimensionnel des résultats désormais classiques de combinatoire des mots portant, par exemple, sur les suites sturmiennes ou sur les décompositions en mots de Lyndon. L'approche développée est à la fois combinatoire, algorithmique mais aussi arithmétique et géométrique. Des interactions naturelles apparaissent de plus avec les problématiques développées dans le pôle "Imagerie combinatoire et arithmétique des ordinateurs". J.-M. Boe et F. Philippe s'intéressent également à des problèmes de combinatoire énumérative, notamment en matière de partitions de nombres, motivés principalement par l'étude de systèmes mésoscopiques en physique quantique statistique.
Bilan
Notre activité s'est concrétisée par des publications mais aussi par l'émergence de projets et l'organisation de rencontres. Le projet MathSTIC "Les mots : de la combinatoire à la dynamique symbolique" a permis d'associer notre groupe à des équipes de l'IGM (Marne-la-Vallée) et de l'IML (Marseille) sur une thématique commune. Nous sommes ainsi en train d'organiser les "9emes Journées Montoises d'Informatique Théorique" qui se dérouleront au LIRMM du 9 au 11 septembre 2002. Un projet CEM2-LIRMM sur la modélisation analytique et numérique de l'émission laser (100kF, 2000-2001) a été mis en place. Divers résultats ont été publiés, concernant surtout les partitions d'entiers et les q-séries quant à leur utilisation en optique quantique.
Perspective
De nombreux problèmes ouverts apparaissent de manière naturelle lors de l'extension de la combinatoire des mots au cadre multidimensionnel. Il reste à définir des analogues pertinents des
69

outils classiques (fonction de complexité, problèmes de périodicité, notions de substitutions, facteurs spéciaux et bispéciaux...) Certaines de ces questions s'expriment en termes de pavages et de systèmes de numération. Nous espérons appliquer cette approche à des problèmes de reconnaissance de plans discrets. Pour ce qui concerne la combinatoire énumérative, nous souhaitons énumérer les partitions de nombres (entiers ou non) avec des contraintes fixées sur les multiplicités des parts, de façon à décrire complètement les statistiques à l'équilibre de systèmes isolés de particules. Nous projetons aussi d'étudier les graphes de transitions entre partitions d'entiers, utiles pour la modélisation dynamique de tels systèmes.
70
Visualisation de graphes
Permanents : G. Mélançon (septembre 2000), Doctorants : F. Jourdan Les membres de ce thème appartiennent au groupe «Nombres, Images et Mots» créé en 2001 au sein du département IFA.
Contexte scientifique
La visualisation de données ou d’information à l’aide d’ordinateurs, plus souvent appelée “Visualisation d information”, s’inspire d’idées ancrées dans des traditions d’origines diverses, dont le graphisme par ordinateur, l’interaction homme-machine, la psychologie cognitive, la sémiotique, le design graphique, la cartographie et l art graphique. Ces dernières années, on a vu émerger une thématique centrée sur la nécessité d aider l utilisateur dans l’exploration ou l’analyse de données, en développant des outils logiciels exploitant les capacités de traitement du système visuel humain. La recherche de nouvelles méthodes et techniques est d’autant plus nécessaire que le flux de nouvelles données à analyser et comprendre va en croissant. Cet état de fait pose un défi qui ne saurait être résolu par une simple croissance en puissance des outils de calcul. La visualisation d’information a un rôle clé dans un nombre croissant de domaines sensibles. Ainsi elle s’avère être un complément indispensable des approches de recherche d information dans les bases de données structurées ou peu structurées (notamment les bases documentaires et le Web), car seule la visualisation permet une approche exploratoire des données. Il en va de même en biologie moléculaire dans les travaux de génomique et de post-génomique, dans l’analyse financière, dans les systèmes de supervision, de contrôle de procédé, etc. Les algorithmes et techniques de visualisation sont à même de tirer profit de la théorie algorithmique et de la combinatoire des graphes, dès lors que les données à visualiser induisent une structure de graphes. Par exemple, les arborescences permettent de décrire des graphes comme les organigrammes ou les classifications encodant les relations entre espèces. En biologie et en chimie, les graphes apparaissent sous la forme d’arbres généalogiques, d’arbres phylogénétiques, de structures moléculaires, de voies métaboliques et de fonctions protéiques. En sciences sociales, les réseaux sociaux sont étudiés afin de comprendre la dynamique des groupes. D’autres domaines d’applications émergent de l’informatique elle-même : systèmes orientés objets, structures de données, etc.
Résultats
Notre équipe mise sur ses compétences en combinatoire des graphes pour concevoir des algorithmes de dessin et de navigation destinés à la visualisation de graphes. On distingue généralement deux modes principaux pour la visualisation : le mode analytique et le mode exploratoire. Dans le premier cas, l’utilisateur navigue au travers de données qui lui sont familières. La visualisation apparaît alors comme un support visuel adapté à l’exercice de certaines tâches sur les données. Dans le second cas, l’utilisateur cherche à découvrir une structure inhérente aux données au moment où il les visualise, et à faire émerger “ des motifs visuels ” qui peuvent la suggérer en appliquant diverses transformations sur les vues qui lui sont offertes. Il s’agit moins ici de développer des modes d’interaction adaptés à une tâche particulière, mais à proposer des algorithmes de calcul, de dessin et de navigation génériques pouvant être appliqués à tout graphe. Le défi qui se pose ici est de mettre à profit les calculs combinatoires sur la structure de graphe et de la faire ressortir au niveau de la vue qui en est proposée pour guider la navigation en mode
71

exploratoire. Cette approche exige de développer une connaissance très fine des statistiques sur les graphes. Le mode exploratoire exige aussi des algorithmes qu’ils soient d’une part réactifs pour éviter des temps de latence trop grand, et prévisibles pour éviter les ruptures visuelles entre deux vues différentes. Nous avons notamment étudié un paramètre mesurant la propagation de l’information dans un réseau (graphe non orienté quelconque) et montré comment sa distribution statistique permettait d’écourter le temps de calcul d’une vue (obtenu à partir d’algorithmes basés sur des modèles physiques).
Perspectives
L’une des directions prometteuses de la discipline est de travailler à des approches réduisant la complexité visuelle de l’information en pratiquant un partitionnement des données et en calculant des vues adaptées. Là encore, il semble naturel de miser sur certains paramètres combinatoires et sur la connaissance de leur distribution statistique. Nous avons abordé plus récemment des travaux en collaboration avec des biologistes dans le but de proposer des outils adaptés à ce domaine. Les données de la biologie moléculaire décrivent les échanges de signaux entre divers composants cellulaires. La biologie s affaire à identifier certains les graphes définis par des sous-ensembles de composants particuliers, et à en identifier le rôle dans le métabolisme. Nos prétentions sont de fournir aux biologistes des outils adaptés à leur travail d’analyse. Le défi ici est de pouvoir calculer et manipuler des hiérarchies de graphes, puisque certaines voies métaboliques apparaissent parfois comme “ sous-voies ” métaboliques dans d’autres contextes. Cette direction nous amène donc à développer des techniques de navigation multi-échelles adaptées aux données post-génomiques.
Moyens
Notre équipe
• entretient des collaborations étroites avec plusieurs équipes françaises (Bordeaux, Nice, Grenoble, Paris, Nantes) et étrangères (Canada, Pays-Bas, Angleterre),
• a obtenu un financement pour une action bilatérale franco-québécoise (deux missions de une semaine à l’université du Québec à Chicoutimi),
• bénéficie d’un soutien financier de 13 k Euros) d’un projet JemSTIC du CNRS,
• co-pilote l’Action Spécifique “Visualisation d’Information” lancée par le CNRS en 2001 (22 k Euros par année, renouvelable),
• bénéficie d’un soutien du ministère de l’éducation de 15 k Euros,
• a obtenu un financement pour une action bilatérale Van Gogh avec le CWI (Amsterdam) pour l’année 2002,
• participe à une action CNRS PICS regroupant des laboratoires français (Bordeaux, Montpellier) et néerlandais (Amsterdam, Delft, Eindhoven),
• organise en janvier 2002 un workshop de trois jours sur la “Visualisation de graphes” réunissant entre autres ses plus proches collaborateurs,
• est actuellement à prospecter auprès d’entreprises régionales aux prises avec des problèmes de visualisation de données.
72

Arithmétique des ordinateurs
Permanents : J.-C. Bajard (septembre 1999) L. Imbert (octobre 2001) Doctorants : F. Rico (soutenance juillet 2001, ATER Paris 6 depuis septembre 2001) Les membres de ce thème appartiennent au groupe «Nombres, Images et Mots» créé en 2001 au sein du département IFA.
Contexte
La recherche en arithmétique des ordinateurs recouvre l'étude des systèmes d'écriture des nombres et leurs représentations matérielles, et l'étude des algorithmes et architectures de calcul des fonctions arithmétiques (addition, multiplication, division) et élémentaires (sinus, cosinus, exponentielle, etc.). Les travaux vont de la conception même de microprocesseurs à l'utilisation efficace de ceux-ci. L'étude de l'arithmétique en virgule flottante et la définition de normes comme la norme IEEE 764 ou 864 entrent dans cette approche. D'autres résultats sont dédiés à des applications spécifiques comme le traitement du signal où sont pris en compte toutes les contraintes liées aux problèmes traités. Les implantations peuvent être matérielles où logicielles. Le choix de la représentation, les algorithmes et l'implantation sont étroitement liés. C'est ce qui fait toute la difficulté et toute la richesse de ce domaine de recherche.
Bilan
Au cours de ces dernières années nos travaux ont porté sur deux classes de représentations des nombres : les systèmes redondants et les systèmes modulaires.
Systèmes redondants
Dans les systèmes redondants, les nombres sont représentés dans des numérations de positions (comme les systèmes classiques en base deux ou dix) utilisant des ensembles de chiffres de cardinal supérieur à la base. Ainsi une même valeur possède plusieurs écritures. Cette redondance permet de développer des algorithmes d'addition parallèles en temps constant (Avizienis 1961). Ceci peut s'avérer fort intéressant pour tous les algorithmes à base d'additions. Mais ces systèmes ne permettent pas de faire des comparaisons exactes en temps constant. Il faut donc revoir les algorithmes pour les adapter à ces systèmes. En 1993, lors de travaux sur l'algorithme CORDIC qui évalue les fonctions trigonométriques et hyperboliques uniquement avec des additions et des décalages, nous avons mis au point un algorithme plus général fonctionnant dans des systèmes redondants, permettant de calculer le logarithme et l'exponentielle complexes. Nous avons publié en 1999 une nouvelle preuve de cet algorithme qui nous a permis de proposer une version plus simple et plus régulière. A partir de ce travail nous avons développé un algorithme “ combiné ” à base d’additions-décalages et d’approximations polynomiales pour l'évaluation de fonctions élémentaires en multiprécision (100 à plusieurs milliers de chiffres). Il tire avantage de deux catégories d'algorithmes. Cette étude est principalement dédiée aux fonctions exponentielle et logarithme complexes. Elle a donné lieu à deux publications une conférence en 2000 et une revue en 2001.
73
Systèmes modulaires
Dans les systèmes modulaires les nombres sont représentés par leurs restes modulo un ensemble de petits nombres premiers entre eux, cet ensemble est généralement appelé base RNS (Residue Number Systems). Ces systèmes nous intéressent essentiellement pour effectuer des calculs exacts avec de très grands entiers. Les applications sont par exemple le calcul formel et la cryptographie. En 1998, nous avons présenté un système de représentation mixte dans lequel de grands nombres entiers sont donnés sous deux formes : une RNS (Residue Number System), l'autre en arithmétique d'intervalles. Un tel système nous a permis de proposer un algorithme de division en RNS facilement implantable sur un bus de processeurs. A partir des travaux de Fabien Rico, nous avons montré comment améliorer cet algorithme lors d'une conférence en 2000. Nous avons, par ailleurs, développé en 2001 un nouvel algorithme de multiplication modulaire en RNS qui peut être implanté sur différents types d'architectures et qui offrent de meilleures performances et plus de régularités que ces prédécesseurs. Nous venons de mettre au point une version de l'exponentiation modulaire qui permet un traitement cryptographique tout en RNS sans aucune conversion dans un système classique de représentation.
Perspectives
Nous participons depuis maintenant deux ans à un groupe de travail A2C2 (Arithmétique Algorithme Cryptographie et Chipset) qui regroupe des mathématiciens du laboratoire GTA (Géométrie, Topologie, Algèbre - UMR CNRS 5030), des microélectroniciens et des informaticiens du LIRMM. Avec cette équipe, nous proposons de mener une étude conjointe (Mathématiques, Informatique, Microélectronique) sur le rapport entre la robustesse des protocoles cryptographiques à clef publique et l’efficacité des opérateurs arithmétiques associés. Notre approche se propose de mettre en évidence l’imbrication de la cryptographie, de l’arithmétique et de l’implantation. Nous désirons répondre à des questions comme : Quels sont les objets mathématiques les mieux adaptés à un protocole cryptographique donné ? Comment peut-on représenter ces objets pour obtenir les meilleurs algorithmes possibles pour les opérations arithmétiques de base ? Quel type d’architecture doit-on choisir pour une implantation matérielle efficace ? Notre but serait de pouvoir proposer les systèmes cryptographiques les mieux adaptés suivant des critères de coût et de performances pour répondre à des besoins allant de ceux d’un simple téléphone portable à ceux d’un gros système. Ce projet représente le thème sur lequel nous allons nous concentrer pendant les quatre années qui viennent. L’équipe fait partie du groupe C2 (Codes et Cryptographie) du GRD-prC ALP (Algorithme, Langage et programmation).
74
Imagerie Combinatoire
Permanents : E. Ahronovitz, J.-P. Aubert, C. Fiorio Doctorants : G. d'Andréa, S. Chemouny, G. Damiand (soutenance décembre 2001, ATER à Poitiers depuis septembre 2001), B. De Mezzo, C. Cadéras de Kerlau L'équipe Imagerie Combinatoire axe ses recherches sur une approche combinatoire de l'imagerie. Dans un domaine acquis jusque-là aux méthodes dérivées du traitement du signal, l'approche combinatoire est en train d'acquérir une reconnaissance internationale :
• conférences spécifiques comme DGCI (Discrete Geometry for Computer Imagery) ou IWCIA (International Workshop on Combinatorial Image Analysis),
• sessions spéciales dans les conférences majeures comme ICP (International Conference on Pattern Recognition) ou CVpr (Computer Vision and Pattern Recognition),
• numéros spéciaux des revues CVIU (Computer Vision and Image Understanding) et TCS (Theoretical Computer Science).
Il s'agit pour nous de considérer une image comme un ensemble de points de Z^n qu'on veut structurer à l'aide d'outils issus des mathématiques discrètes, de la théorie des graphes et de l'algorithmique combinatoire. La finalité en est l'utilisation de l'image ainsi structurée dans des logiciels de reconnaissance de formes, d'analyse et visualisation d'images.
Thèmes de recherche
Nous travaillons essentiellement dans deux directions : la représentation et la segmentation d'images. Dans le domaine de la représentation nous cherchons à calculer efficacement des structures liant les avantages de graphes et des cartes combinatoires, permettant de décrire les éléments topologiques de l'image : régions et frontières, adjacences, inclusion de régions... La segmentation consiste à partitionner une image en régions, ensembles de pixels/voxels homogènes et connexes. Dans ces travaux, nous cherchons à utiliser au mieux les caractéristiques des représentations combinatoires introduites ci-dessus. La recherche de modèles formels permettant d'étudier les propriétés topologiques des images, relie nos travaux aux domaines de la géométrie discrète et de la topologie d'ensembles discrets (Jean-Pierre Aubert).
Travaux et collaborations
Nos travaux couvrent :
• des algorithmes permettant de construire efficacement les représentations des images : calcul de cartes/graphes 2D et 3D (G. Damiand, C. Fiorio), en collaboration avec l'université de Poitiers, laboratoire SIC - Sircom
• des algorithmes permettant de déterminer efficacement une segmentation des images 2D et 3D : algorithmes de Union-Find ou balayage à la volée (E. Ahronovitz, G. Damiand, C. Fiorio)
75

• des critères statistiques non paramétriques (sans hypothèse sur la distribution de l'image) concernant la propriété d'homogénéité ; travail de Christophe Fiorio en collaboration avec Richard Nock (Université Antilles-Guyanne)
• la segmentation d'images végétales utilisant les représentations précédentes (C. Fiorio, B. De Mezzo - thèse en cours -) en collaboration avec le Cemagref, pour la détection d'adventices
• la segmentation d'images médicales de différentes natures :
o images scanner pour la segmentation du foie (E. Ahronovitz, S. Chemouny), en collaboration avec l'Institut du Cancer de Montpellier, Val d'Aurelle
o images scintigraphiques pour les arythmies cardiaques (E. Ahronovitz, C. Cadéras de Kerlau - thèse en cours -), en collaboration avec le CHU Lapeyronie, Montpellier.
Thèses soutenues
Gilles d'Andréa a soutenu en décembre 1999 ; thèse intitulée Superposition de polyominos et leurs applications au traitement d'images Stéphane Chemouny a soutenu en juillet 2001 ; thèse intitulée Filtrage et Segmentation d'images tridimensionnelles : Application à la détection et à la caractéristation des structures anatomiques et pathologiques du foie Guillaume Damiand a soutenu en décembre 2001 ; thèse intitulée Définition et étude d'un modèle topologique Minimal de représentation d'images 2D et 3D
Perspectives
Les perspectives vont vers des logiciels d'analyse et de modélisation interactive d'images 3D, sur la base de structures topologiques. Dans des applications comme l'évaluation et l'évolution de volumes dans le temps nous travaillons sur des images 4D, représentées par des coupes successives, temporelles (collaboration médicale, images scintigraphiques cardiaques). D'autres applications liées à ces perspectives comme la segmentation de structures à haute densité (collaboration Cirad) devraient voir le jour. Enfin, nous avons lancé une collaboration avec le département de robotique du Lirmm (A. Crosnier) pour l'étude et la définition d'un modèle permettant la reconstruction et la mise à jour d'environnements pour des applications robotiques.
76
Méthodes et algorithmes pour la bioinformatique
Permanents : O. Gascuel (responsable), V. Berry, G. Caraux, E. Rivals Intervenant : A. Jean-Marie Invités : D. Bryant (NZ), A. McKenzie (NZ), J. Van Helden (B) Ingénieur : S. Pinloche Doctorants : S. Bérard, L. Bréhelin, O. Elemento, C. Fagot, S. Guindon, F. Nicolas, V. Ranwez
Présentation générale
Thèmes de Recherche
Aspects méthodologiques
• statistiques, probabilités, classification, analyse des données
• mathématiques discrètes, algorithmique combinatoire, algorithmique du texte
• reconnaissance des formes, apprentissage, modèles de Markov cachés Applications à la biologie moléculaire
• reconstruction phylogénétique
• alignement, recherche de motifs et de signaux
• évolution des séquences répétées
• analyse des données d'expression
• traitement de données textuelles
Actions diverses en 2001
• nous assurons la coordination scientifique de l'action nationale Informatique, Mathématiques et Physique pour la Génomique (IMPG) qui concerne une trentaine d'équipes et environ 500 chercheurs.
• nous sommes responsables, avec Maxime Crochemore (Univ. Marne-la-Vallée), de l’action du département STIC du CNRS intitulée “Algorithmes pour la bioinformatique”.
• nous avons publié avec Marie-France Sagot (INRIA) un recueil d’articles, issus du congrès JOBIM, dans Lecture Notes in Computer Science, Springer-Verlag (LNCS 2066).
• nous avons organisé avec Bernard Moret (Univ. New-Mexico) le premier Workshop on Algorithms in Bioinformatics à Aarhus au Danemark, du 28 au 31 Aout 2001. Les actes ont été publiés dans Lecture Notes in Computer Science, Springer-Verlag (LNCS 2149).
Collaborations
• phylogénie des espèces végétales, avec Xavier Perrier (CIRAD, Montpellier); travaux soutenus par le programme GENOPLANTE.
77
• méthodes pour l'étude de l'évolution intragénomique des séquences répétées, avec Marie-Paule Lefranc et Jérôme Buard (IGH, Montpellier), et Philippe Jarne (CEFE, Montpellier); travaux soutenus par l'action interEPST Bioinformatique.
• méthodes et modèles pour l'analyse de niveaux d'expression, avec Rémy Houlgatte (CIML, Marseille), Pierre Chiapetta (CPT, Marseille), Bruno Torressani (LATP, Marseille), Patrick Doumas et Michel Rossignol (BPMP, Montpellier); travaux soutenus par l'action interEPST Bioinformatique.
• méthodes combinatoires pour la construction d'arbre consensus de phylogénies sur des ensembles de taxons ou de gènes différents, avec Emmanuel Douzery (ISEM, Montpellier), Vincent Laudet et Marc Robinson-Rechavi (ENS, Lyon) et Xavier Perrier (CIRAD, Montpellier); travaux soutenus par l'action interEPST Bioinformatique.
• modèles de Markov pour la prédiction de séquences : application au développement d’amorces pour la PCR, avec Nicolas Galtier (GPI, Montpellier) et en commun avec Alain Jean-Marie du LIRMM, travaux soutenus par l'action interEPST Bioinformatique.
• combinatoire des mots, avec Martin Vingron (Dir.), Stephan Haas, Tobias Müller et Sven Rahmann du Département "Computational Molecular Biology", au Max Planck Institute für Molekular Genetik, Berlin.
• méthodes de phylogénie basées sur le critère d’évolution minimum, avec Richard Desper (NCBI, Washington, USA).
Formations
• avec le département Biologie de l'UM2, nous avons ouvert à la rentrée 2001 un DESS de BioInformatique.
• nous organisons un cours de bioinformatique au sein du DEA d'Informatique de Montpellier.
• nous participons aux DEA Informatique Fondamentale et Applications de Marne-la-Vallée.
• nous avons participé à l'organisation et aux cours de l'école thématique CNRS-INRA protéome en Octobre 2001 à la Grande-Motte.
Résultats récents
Dans l’ensemble de nos travaux, nous essayons de combiner des résultats théoriques solides avec des applications réelles, essentiellement issues de la biologie moléculaire et de la génomique. Nous donnerons quatre exemples de cette approche : Nous poursuivons nos recherches concernant la statistique du vocabulaire des textes en étudiant les ensembles de chevauchements possibles d'un mot avec lui-même. Ces chevauchements sont appelés périodes. Pour une taille de mot donnée, nous montrons comment énumérer tous les ensembles de périodes et comment compter le nombre de mots qui partagent le même ensemble. Nous définissons un sous-ensemble minimal de périodes à partir duquel on retrouve l'ensemble complet. En outre, nous établissons une borne inférieure précise du nombre d'ensembles de périodes. Ces résultats, qui servent à calculer les moments de statistique sur les textes, ont été publiés à l'International Colloquium on Algorithms Languages and Programming (ICALP’2001). Nous avons été parmi les tous premiers à proposer une méthode de reconstruction phylogénétique basée sur des critères combinatoires. Cette méthode a fait l’objet d’un article paru en 2000 dans Theoretical Computer Science, et ce travail est aujourd’hui largement cité. Il a été poursuivi et élargi, et nous avons mis en place une famille structurée de critères et d’algorithmes combinatoires, pour construire des classifications enracinées et non-enracinées depuis différents type de données. Ces travaux viennent d’être acceptés pour publication par Advances in Applied Mathematics. Plus récemment, nous avons montré les limites de certaines approches combinatoires ( pourtant très répandues en biologie) qui consistent à rechercher l’arbre entièrement résolu qui satisfait le plus
78

grand nombre de 4-arbres, ceux-ci étant inférés de manière systématique sur tous les quadruplets de séquences. Ces travaux ont été publiés dans Molecular Biology and Evolution. Nous avons poursuivi nos efforts sur les méthodes de reconstruction phylogénétique basées sur l’emploi de distances évolutives entre séquences. Nous nous sommes notamment intéressés à la prise en compte dans le calcul des distances évolutives du fait que les sites évoluent à des vitesses variables, et nous avons proposé une méthode pour l’estimation efficace du paramètre représentant cette variabilité. Ces travaux doivent être prochainement publiés dans Molecular Biology and Evolution. Egalement, nous sommes revenus sur le principe d’évolution minimum, qui consiste à inférer l’arbre le plus court. Nous avons montré que, suivant les définitions de la longueur d’un arbre, ce principe pouvait ou non être statistiquement consistant. Ces travaux ont été publiés dans Systematic Biology et un article doit paraître dans Discrete Applied Mathematics. Les recherches sur ce sujet sont actuellement poursuivies et développées en collaboration avec Richard Desper du NCBI à Washington. Depuis déjà deux ans, nous nous intéressons à l’évolution intragénomique, par opposition aux études phylogénétiques qui cherchent à retracer l’évolution de séquences appartenant à des espèces et donc des génomes distincts. Nous cherchons en particulier à retracer l’histoire des duplications en tandem. Nous avons montré que lorsque les séquences répétées sont longues et contiennent des gènes, la recombinaison inégale constitue un bon modèle pour expliquer ces duplications. Une première étude de ce modèle et de sa validité biologique sera prochainement publiée dans Molecular Biology and Evolution, et nous venons d’engager une collaboration avec Michaël Hendy (NZ) sur les propriétés combinatoires des arbres de duplications ainsi définis. Sur un tout autre aspect, nous nous intéressons à reconstruire une histoire évolutive à partir de séquences répétées. Nous avons conçu un algorithme optimal d'alignement de mini-satellites qui permet de calculer une distance entre paire de mini-satellites. A partir de ces distances, nous pouvons reconstruire une histoire évolutive arborée avec des méthodes classiques de phylogénie. Cet algorithme sera publié à la 6ème Conference on Computational Molecular Biology en 2002.
Perspectives
Dans les années à venir nous entendons faire porter nos efforts sur les aspects suivants : Méthodes combinatoires de classification, notamment le problème du super-arbre qui consiste à combiner des phylogénies portant sur des sous-ensembles partiellement recouvrant d’espèces, et qui représente une étape indispensable dans la construction des très grandes phylogénies destinées à l’étude de la biodiversité. Une étape préalable, sur laquelle nous travaillons actuellement est de déterminer le degré de congruence/contradiction mutuelle des différents jeux de données ayant servi à inférer les phylogénies que l’on cherche à assembler. Séquences répétées. De nombreux problèmes informatiques concernant les répétitions d'ADN restent ouverts : l'alignement dans des modèles évolutifs plus complexes, l'alignement multiple, la reconstruction d'un arbre de parcimonie à partir de ces données ou encore la reconstruction de l'histoire des duplications pour un locus donné. L'objectif est de comprendre les divers mécanismes de duplication à l’œuvre dans les génomes. Pour disposer de données, nous cherchons aussi à localiser et annoter de telles séquences répétées à partir de la séquence d'un chromosome. Cela permettra d'examiner l'évolution de l'ensembles des micro- ou mini-satellites à l'intérieur d'un génome ou entre deux génomes. Analyse des données d’expression, issues de puces à ADN ou de techniques apparentées, ainsi que du protéome. Il s’agit très vraisemblablement du domaine de la bioinformatique qui devrait le plus se développer dans les années à venir. Les enjeux sont en effet considérables puisqu’il s’agit, à long terme, de comprendre comment et pourquoi les gènes s’expriment dans telle ou telle condition. Nous avons déjà réalisé des premiers travaux dans le domaine, présentés notamment au congrès JOBIM’2001, basés sur des techniques statistiques et permettant le prétraitement des données. A plus long terme, nous nous orienterons vers l’inférence de réseaux d’interaction et de régulation à partir des données.
79

Notre équipe a pendant de longues années mené un activité forte en apprentissage et a acquis dans ce domaine une reconnaissance nationale et internationale. Lorsque nous nous sommes tournés vers la bioinformatique nous avons pour part laissé cet axe de coté. Cependant, l’apprentissage est très certainement l’un des outils majeurs de la bioinformatique, pour tout ce qui est prédiction (sites, gènes, structures, …). Nous entendons nous réinvestir dans le domaine et, notamment, mettre l’accent sur nos travaux sur les modèles de Markov cachés.
80
Représentation de connaissances par des graphes étiquetés
Permanents : M. Chein, M.-L Mugnier Doctorants : J.-F. Baget, D. Genest (maître de conférences à Angers depuis septembre 01)
Contexte des travaux
L’objectif fondamental de notre équipe est, depuis une dizaine d’années, d’étudier, sous les aspects théorique, algorithmique et expérimental, l’hypothèse suivante : les graphes étiquetés constituent un “ bon ” modèle de représentation informatique de connaissances. Parler de représentations de connaissances par des graphes étiquetés signifie, pour nous, que les différentes connaissances sont modélisées par des graphes étiquetés et que les raisonnements sont modélisés par des opérations de graphes, la notion fondamentale étant celle de projection (un homomorphisme de graphes étiquetés prenant en compte un ordre sur les étiquettes). Au cours de la première phase de notre travail (1991-96), nous avons, sur le plan théorique et algorithmique, étudié, précisé, complété et formalisé le modèle des graphes conceptuels simples proposé par Sowa (pour plus de détails on peut consulter notre page web, http://www.lirmm.fr/~cogito/, ainsi que les divers rapports d’activité du LIRMM). Nous avons également construit la plate-forme d’aide au développement de systèmes à base de connaissances, COGITO, et développé diverses applications (bases de données, systèmes questions/réponses, …). Nos résultats nous ont permis de faire reconnaître l’intérêt de notre approche sur le plan national et international. L’article dans la revue RIA en 1996 ou la présentation du projet CORALI, conférence invitée à ICCS97, font, en partie, la synthèse de cette phase. Au cours de la deuxième phase de notre travail (à partir de 1996), nous avons, tout en gardant notre approche particulière, étendu le modèle de base, développé une nouvelle plate-forme et travaillé sur de nouvelles applications. Voici quelques résultats obtenus au cours de cette période.
Résultats marquants
Sur le plan théorique et algorithmique
Nous avons introduit et étudié la notion de règles de graphes - “ si un graphe A se projette dans un graphe G alors on peut ajouter (modulo la projection) le graphe B à G ” - (mécanismes d’exploitation en marche-avant et marche-arrière, adéquation et complétude, comparaison avec prOLOG, …, cf., en particulier la thèse d’E. Salvat soutenue fin 1997 et l’article à ECAI’97), ainsi que les graphes emboîtés (équivalence entre différents modèles de graphes emboîtés, adéquation et complétude, cf. l’article dans Computational Intelligence en 1998 et l’article à KR’98). Une autre extension concerne l’introduction et l’étude de la notion de contraintes de graphes - “ si un graphe A se projette dans un graphe G alors il faut que le graphe B soit présent (modulo la projection) dans G ” - (cf., en particulier, KAW’99, IJCAI’01, et un article dans la revue JAIR à paraître). Dans sa thèse, soutenue en novembre 2001, J.-F . Baget a présenté de nombreux résultats nouveaux (beaucoup non encore publiés) sur ces diverses notions. Citons les résultats les plus importants : (a) un algorithme efficace de calcul de toutes les projections d’un graphe simple dans un autre (cet
81

algorithme ayant été présenté dans le cadre du calcul de toutes les solutions d’un CSP binaire, cf. IJCAI’01, mais pas encore sous sa forme générale, considérant des relations/contraintes non plus binaires mais n-aires) (b) la preuve que le modèle “ graphes simples + règles ” est un modèle de calcul, qu’il reste un modèle de calcul même si l’on se restreint à une règle et une étiquette, et l’étude de cas décidables pour ce modèle, (c) la définition d’un mécanisme de chaînage avant efficace reposant sur la construction d’un graphe de dépendance des règles, (d) l’étude de la notion de contrainte définissant la cohérence d’une base de connaissances, la définition de différents modèles combinant règles et contraintes, ainsi qu’une étude systématique de la complexité des problèmes fondamentaux des différents modèles obtenus en considérant graphes simples, différents types de règles, et contraintes (l’essentiel de ces résultats est exposé dans l’article à paraître dans la revue JAIR).
Sur le plan des outils et des applications
Les résultats les plus marquants ont été obtenus par D. Genest qui a soutenu sa thèse en décembre 2000. Il a construit une nouvelle plate-forme, COGITANT, intégrant les diverses extensions étudiées théoriquement (le logiciel, disponible à http://XXXXX, est utilisé dans de nombreux laboratoires universitaires et industriels). Il a proposé une approche originale de la notion de pertinence en recherche documentaire, mise en œuvre sur COGITANT, dans le cadre du projet MOGADOR (en collaboration avec l’Agence des Bibliothèques de l’Enseignement Supérieur). Il est également responsable de toute la partie indexation et recherche par le contenu du projet OPALES (dont le maître d’œuvre est l’Institut National de l’Audiovisuel, et pour lequel nous collaborons avec l’équipe Intéractions Homme/Machine du LIRMM). Au cours de cette deuxième phase nous pensons avoir montré, par nos résultats à la fois théoriques et expérimentaux, que notre modèle formel a les qualités nécessaires d’un “ bon ” modèle de représentation de connaissances : Puissance descriptive : les connaissances se manifestent sous des formes très diverses (textes, schémas, images, …), mais aussi sous forme de modèles formels (ensembles, fonctions, automates, …), et il est possible de représenter dans notre modèle nombre de tels objets . Puissance expressive : dans des domaines où les connaissances ne sont pas formalisées, des utilisateurs divers doivent pouvoir avoir accès aux représentations. En particulier, dans des activités d’acquisition de connaissances, la personne qui représente des connaissances doit pouvoir exprimer clairement la sémantique (non formelle) de ce qu’elle représente. Les représentations ne doivent donc pas être trop difficiles à lire par un non-informaticien, ce qui est le cas de représentations par des graphes étiquetés . Efficacité : s’il nous reste de nombreuses choses à faire dans ce domaine, il est déjà possible, dans certaines applications (en particulier en recherche documentaire où les graphes, s’ils peuvent être très nombreux, plusieurs millions, sont aussi très petits, une dizaine de sommets) de représenter et de manipuler de grandes quantités de connaissances, avec des accès rapides et des algorithmes de calcul efficaces . Sémantiques formelles : nos modèles étant des modèles de représentation de connaissances, des sémantiques logiques sont essentielles. Si les modèles basés sur les graphes simples (ou emboîtés) et règles ont été dotés de sémantiques adéquates et complètes en logique du premier ordre, cet aspect n’est pas encore complètement résolu pour les modèles combinant contraintes et règles.
Perspectives
Sur le plan théorique, plusieurs problèmes importants restent ouverts ; dans le cas des graphes simples, les liens avec les bases de données (théorème d’homomorphisme) sont maintenant établis. Nous envisageons de faire de même avec les règles et les TGDs ; nous essaierons de construire des sémantiques logiques pour les modèles avec règles et contraintes. Il serait également intéressant de construire des modèles formels de la notion de pertinence proposée par D. Genest, et de la recherche d’informations basée sur cette notion ,…
82

En ce qui concerne les outils il faudrait étendre COGITANT en permettant de manipuler notre modèle le plus complexe (SREC) en implémentant d’une manière efficace nos algorithmes, en particulier l’algorithme de projection (IJCAI’01). En ce qui concerne les applications, nous souhaitons continuer à travailler sur la recherche documentaire et la recherche d’informations, domaines dans lesquels notre approche de la représentation du contenu de documents s’est avérée intéressante, et sans doute reprendre une application comme le projet CASIMODO (cf. le rapport d’activité de 1997, le projet n’ayant pu aboutir pour des raisons extra scientifiques liées à l’intégration de Dassault Electronique dans Thales) pour lequel le modèle SREC devrait être utile.
83

Systèmes à contraintes
Permanents : C. Bessière, P. Janssen, M.C. Vilarem. Doctorant : J. Amilhastre (jusqu'en septembre 2000),
Contexte des travaux
Un réseau de contraintes est défini par un ensemble de variables à domaines finis de valeurs, et un ensemble de contraintes spécifiant des combinaisons de valeurs interdites pour certaines variables. L'équipe travaille sur le thème des systèmes à contraintes depuis plusieurs années, principalement sur les aspects algorithmiques, mais également sur leur utilisation (par exemple pour l'aide à la conception). Elle a donc été amenée à s'intéresser non seulement au problème classique de la satisfaction d'un réseau de contraintes (généralement appelé CSP pour "Constraint Satisfaction problem"), mais à diverses extensions nécessaires au traitement d'applications. Le groupe a été membre du prC-GDR IA, et maintenant du prC-GDR I3. Il est à noter que certains des travaux de membres de ce projet sont décrits dans la partie décrivant le groupe Coconut.
Principaux résultats obtenus entre 1998 et 2001
Consistances locales et propagation de contraintes
La propagation de contraintes est la brique de base de tous les systèmes faisant de la résolution de contraintes (Ilog Solver, Choco, etc.). Il est donc important de disposer de propriétés de consistance locale appropriées et d'algorithmes efficaces pour les appliquer. Verfaillie, Martinez et Bessière ont proposé un schéma d'algorithme générique pour le calcul de consistances locales. Selon les paramètres avec lesquels on l'appelle, il s'instancie en algorithme de calcul de la plupart des consistances locales étudiées par Debruyne et Bessière en 1997 et 1998, plus de nouvelles non connues auparavant. Même si l'efficacité est primordiale, dans un solveur générique, la souplesse et la simplicité des algorithmes jouent aussi un rôle important. Bessière et Régin ont proposé de nouveaux algorithmes d'arc-consistance qui respectent au maximum ces spécifications, tout en gardant les propriétés d'optimalité.
Contraintes non binaires
Bessière et Régin ont développé une technique qui permet non seulement de filtrer n'importe quelle contrainte non-binaire, mais aussi de filtrer n'importe quel sous-problèmes globalement, et non pas contrainte par contrainte comme le fait l'arc-consistance. Cette approche a de fortes répercussions en modélisation et prototypage d'applications réelles. Toujours dans le but de résoudre des problèmes avec des contraintes non binaires, Bessière, Meseguer, Freuder et Larrosa ont montré que si parmi les algorithmes les plus connus de résolution de CSP le backtracking et MAC avaient une extension évidente et unique au cas non binaire, il n'en était pas de même pour forward checking (FC). Ils ont donc proposé différentes extensions de FC au cas non binaire, dont une seule était connue auparavant (celle de Van Hentenryck).
85
Dernier point dans cette rubrique, Bessière a posé le décor de l'existant en matière de résolution de CSP à contraintes non binaires, en a tiré les conséquences sur les approches utilisables ou non, et a tracé les différentes perspectives qui s'ouvrent maintenant à la communauté pour affronter le challenge de la résolution d'applications industrielles, qui, toutes, nécessitent la notion de contrainte non binaire.
Csp interactifs
Dans les problèmes de configuration de produit, on peut distinguer des contraintes de base, inviolables, qui correspondent en général à la faisabilité du produit, et des contraintes plus souples qui traduisent en fait des préférences de l'utilisateur. Un système interactif d'aide à la configuration a donc pour tâche d'aider l'utilisateur à faire ses choix, ce qui implique des tâches telles que : maintien de consistance, aide au rétablissement de la cohérence, et fourniture d'explications. Nous avons proposé un cadre général étendant le cadre classique CSP pour ce problème. L'analyse de la complexité des tâches à assurer nous a amené à utiliser une forme de compilation du CSP : la représentation de l'ensemble de ses solutions par un automate fini. On souhaite bien sûr que cet automate soit le plus compact possible. Dans le cas où on choisit d'utiliser des automates non déterministes, Amilhstre, Janssen et Vilarem ont montré les liens entre le problème de minimisation et un problème de théorie des graphes : la recherche d'un recouvrement minimum des arêtes d'un graphe biparti par des sous-graphes bipartis complets; ils ont identifié une nouvelle classe polynomiale pour ce problème de recouvrement , généralisant strictement les classes connues; ils ont également utilisé ces liens pour proposer des heuristisques de minimisation. Enfin, Amilhsatre, Fargier et Marquis ont utilisé cette structure d'automate pour fournir des explications et rétablir la cohérence dans un système d'aide à la configuration.
Heuristiques
L'ordre dans lequel on parcourt l'arbre de recherche pendant la résolution d'un CSP affecte grandement l'efficacité de cette résolution. Les heuristiques les plus connues et les plus efficaces à ce jour ne tiennent compte que de critères liés à une seule variable pour décider quelle sera la prochaine variable à affecter. Bessière, Chmeiss et Saïs ont proposé une heuristique paramétrable par la taille du voisinage à examiner. Les premiers tests ont permis de voir que cette approche surpassait largement les heuristiques existantes sur les problèmes très difficiles, et a permis de trouver l'optimum sur certains problèmes d'optimisation ouverts.
86

Représentation par objets
Permanents : R. Ducournau (responsable), Y. Ahronovitz, H. Dicky, M. Huchard Doctorants : G. Ardourel, H. Leblanc, G. Pavillet, S. Pelenc, C. Roume
Présentation générale
Thèmes de recherche
Aspects méthodologiques
• algorithmique des graphes et des ensembles ordonnés, treillis de Galois
• méthodes de conception par objets, UML, langages de programmation par objets
• représentation des connaissances Application à l'étude des langages à objets et des hiérarchies de classes
• sémantique de l'héritage et de la classification
• réorganisation de hiérarchies
• implémentation et compilation de langages à objets
• étude des exceptions
• encapsulation et protection des accès
Collaborations
• "assemblage de composants logiciels", contrat avec France Télécom R&D (1997-2000)
• MACAO, projet RNTL avec France Télécom R&D et Softeam (2001-2003)
Actions
• organisation de la conférence “ Langages et Modèles à Objets ” à Montpellier, janvier 2002
• co-organisation du workshop "Objects and Classification: a natural convergence", ECOOP 2000
Résultats 1998-2001
Réorganisation de hiérarchies
Dans les quatre dernières années, nous avons 1) proposé et implémenté un algorithme efficace de construction globale de hiérarchie, 2) étudié l'applicabilité de la méthode de construction incrémentale (précédemment développée) dans le cas d'une hiérarchie en phase d'exploitation, 3) effectué une étude théorique d'algorithmes proposés dans la littérature et qui étaient peu ou incomplètement spécifiés, 4) proposé et mis en oeuvre, dans le cadre de Java, une méthode de construction automatique d'interfaces à partir d'un ensemble de classes, 5) effectué des tests sur les librairies du
87
langage Java et sur une application de France Télécom dédiée à l'ingénierie des réseaux de télécommunication, 6) proposé et testé un ensemble de métriques mesurant le niveau et la cohérence de la généralisation et de la spécialisation dans une hiérarchie de classes, 7) commencé l'étude de l'application de nos méthodes dans le cadre d'UML. Nous avons également commencé à travailler sur l'organisation des hiérarchies de classes "exceptions", classes qui représentent les erreurs et situations exceptionnelles survenant lors de l'exécution d'une application. Nous avons étudié la place de ces classes en UML et proposé un guide méthodologique pour leur modélisation.
Sémantique de la classification
A la suite de nos travaux antérieurs sur les “ systèmes classificatoires ”, nous avons démontré la sémantique de classification implicite dans les langages objets, en modélisant l'intégration d'une logique de descriptions (FACT) à un langage objet (CLAIRE). Pour l'occasion, FACT a été portée dans le langage CLAIRE et une Abox a été développée.
Implémentation des langages objets
A la suite de travaux antérieurs sur l'implémentation des langages à objets dans un cadre de typage dynamique, nous avons entamé une étude exhaustive de l'implémentation des langages à objets à typage statique en compilation séparée. A la suite de cette étude, nous avons repris la technique d'implémentation basée sur la coloration, introduite à la fin des années 80 par divers auteurs, dont nous-mêmes dans le langage YAFOOL. Une variante de cette technique, la coloration de classes, est une technique efficace de test de sous-type. Nous en avons proposé une version plus efficace et étudié exhaustivement plusieurs heuristiques.
Contrôle d’accès statique
Nous avons proposé un formalisme indépendant des langages de programmation, les "graphes d'accès", qui explicite des ensembles d'accès et que nous jugeons adapté à des fins de modélisation et de raisonnement. Des études précises ont été faites quant à l'application de ce formalisme en relation avec les langages Eiffel, Java, C++ et Ada. Des outils sont en cours de développement.
Perspectives
Réorganisation de hiérarchies
Les algorithmes de construction de hiérarchies de classes vont être implémentés dans l'atelier Objecteering, l'une des références sur le marché des ateliers de développement logiciel. Nous poursuivrons nos efforts sur les méthodes de construction, notamment en approfondissant l'application à UML et en étudiant le problème des transformations de structures de hiérarchies (graphes orientés sans circuit vs arborescence).
Implémentation des langages objets
A l'issue de l'analyse que nous avons effectuée sur l'implémentation des langages à objets, et des développements effectués sur la technique de coloration, nous avons décidé d'un projet de recherche à moyen terme sur ce thème. L'idée est d'adapter à la compilation séparée deux techniques qui sont essentiellement globales : la coloration et l'analyse de types. L'antinomie n'est qu'apparente. Ce travail devrait être effectué en collaboration avec le projet Miro de l'INRIA-Lorraine, dont l'équipe a développé un compilateur pour le langage Eiffel. L'idée est d'adapter ce compilateur ou de réutiliser certains de ses éléments pour une compilation séparée utilisant les techniques que nous avons ou allons développer.
88

Contrôle d’accès
Une plate-forme dédiée à la manipulation des graphes d'accès devrait voir le jour à court terme (1 an). Nous espérons être bientôt en mesure de proposer un mécanisme simple de contrôle d'accès statique. Nous étudierons l'introduction des graphes d'accès dans la notation UML et le processus de développement.
89


Département MICMicroélectronique
Responsable : Michel RenovellAdjoint : Pascal Nouet
Rapport d’activité du LIRMM 1998-2001

Personnels du département (au 31.12.01)
Enseignants-chercheurs
Auvergne Daniel Professeur Montpellier II Bertrand Yves Professeur Montpellier II Cambon Gaston Professeur Montpellier II Cathébras Guy Maître de conférences Montpellier II Dufaza Christian Maître de conférences Montpellier II Galy Jérôme Maître de conférences Montpellier II Latorre Laurent Maître de conférences Montpellier II Nouet Pascal Maître de conférences Montpellier II Pravossoudovitch Serge Professeur Montpellier II Robert Michel Professeur Montpellier II Roche Fernand-Michel Maître de conférences Montpellier II Rouzeyre Bruno Professeur Montpellier II Sagnes Georges Professeur Montpellier II Torrès Lionel Maître de conférences Montpellier II
Chercheurs CNRS
Azaïs Florence Chargée de recherche Azémard-Crestani Nadine Chargée de recherche Bernard Serge Chargé de recherche Deschacht Denis Directeur de recherche Flottes Marie-Lise Chargée de recherche Girard Patrick Chargé de recherche Landrault Christian Directeur de recherche Renovell Michel Directeur de recherche
Post-doctorants
Maurine Philippe ATER jusqu’au 31.09.00
Thèses en cours Début
Benoît Pascal MESR septembre 2001 Beroulle Vincent Allocation couplée octobre 1999 Bonhomme Yannick MESR octobre 2000 Caillard Benjamin Contrat ADER novembre 2000 Comte Mariane MESR septembre 2000 Dardalhon Muriel Bourse CNES octobre 2000 Delauche Flavien CIFRE MEMSCAP octobre 1999 Dutertre Jean-Max MESR octobre 2000 Faure Philippe MESR octobre 1999 Heron Olivier MESR AMN octobre 2001 Galliere Jean-Marc Salarié éducation nationale octobre 2000 Landrault Alexis BDI CNRS-INFINEON décembre 2000 Laville Sébastien CIFRE ST Microelectronics décembre 1999 Lopez Alain MESR octobre 2001 Mezghani Brahim Enseignant chercheur tunisien décembre 2000 Michel Xavier MESR octobre 2000 Navarro David MESR novembre 2000
93

Papaix Caroline CIFRE AMTEL novembre 1999 Pelissier Gilles CIFRE + CDI octobre 1998 Pellier Ludovic CIFRE janvier 2001 Perez Renaud CIFRE IROC Technology janvier 2001 Picot Fabrice CIFRE AMTEL + CDI octobre 1998 Poirier Regis MESR octobre 2001 Pouget Julien MESR octobre 1999 Rahajandraibe Wenceslas Contrat EGIDE septembre 1999 Richard Alexandre CIFRE INFINEON + CDI janvier 1999 Sassatelli Gilles MESR octobre 1999 Rahim Solaiman CIFRE octobre 2001 Tisse Cristel-Loïc CIFRE ST Microelectronics septembre 2000 Vogel Isabelle Contrat ADER janvier 2000
Thèses soutenues
1998 Financement Devenir Gal Stéphan MESR Ingénieur ALTRAN Léger-Cremoux Séverine MESR Ingénieur MAGMA - USA Moreda Véronique MESR Ingénieur Severac Daniel MESR Ingénieur Toulouse Alain MESR Ingénieur DOLPHIN Vanier Eric MESR Ingénieur CADENCE
1999 Berthelot David MESR Ingénieur MAGMA Bodin Jean Charles MESR Ingénieur AGILENT Gallegos Augusto CIFRE VLSI Technology Ingénieur Monnier Thierry MESR Ingénieur ST Microelectronics Potin Olivier MESR Ingénieur TEMENTO Salager Laurent MESR Ingénieur ST Microelectronics Volpe Laurent MESR Ingénieur CADENCE
2000 Bernard David MESR Ingénieur ATMEL Diou Camille MESR Maître de conférence Strasbourg Guiller Loïs MESR Ingénieur SYNOPSYS Petitqueux Aurélia MESR Ingénieur SYNOPSYS Raimbault Sébastien Contrat ADER Ingénieur NEXWAVE Rezzoug Mustapha Contrat ADER Ingénieur UNILOG Grenoble
2001 Aline Michel Contrat ADER ATER Lannion Bernard Serge Allocation couplée CR CNRS Colançon Stéphane Allocation MESR Ingénieur CADENCE Lafontan Xavier BDI CNRS-CNES Ingénieur MEMSCAP / CNET Maurine Philippe Contrat ADER CDD CNRS Servel Gregory Allocation MESR Ingénieur SILVACO Virazel Arnaud Allocation MESR Post-doc Allemagne
94

Introduction générale
Les thèmes et projets de recherche
Dans le domaine des circuits intégrés, on s’accorde à penser que la course à la miniaturisation est la caractéristique essentielle des technologies CMOS sur silicium. Il faut dire que, dans ce domaine, miniaturisation et donc intégration sont synonymes de performances. On intègre toujours plus de composants sur un même substrat de silicium pour obtenir des systèmes qui fonctionnent à des fréquences plus élevées, qui consomment moins, qui ont plus de capacité mémoire ou de ressources de calcul, qui présentent un coût ou un encombrement moindre… A l’heure des technologies submicroniques profondes, le degré de miniaturisation est tel que l’on atteint des taux d’intégration vertigineux avec des circuits pouvant contenir jusqu’à cent millions de transistors. A ce stade d’intégration, le circuit sur silicium apparaît comme un véritable trou noir capable d’engloutir la fonctionnalité complète d’une carte électronique, autant dans ces aspects logiciels que matériels, donc le système électronique dans son ensemble : on parlera de Systèmes Intégrés. Cette course effrénée à l’intégration sur silicium ne s’arrête pas aux seuls composants électroniques, aux seuls transistors MOS. Des systèmes mécaniques, thermiques, magnétiques ou autre peuvent aussi être intégrés pour former des capteurs ou actionneurs de tout type qui pourront d’ailleurs côtoyer sur le même substrat l’électronique de traitement des signaux délivrés par les capteurs ou requis par les actionneurs. Le capteur ou l’actionneur intégré avec son électronique de traitement forment un système à part entière: on parlera de Micro-Systèmes. Cet accroissement de la complexité des Systèmes Intégrés et des Micro-Systèmes CMOS submicroniques pose de nombreux problèmes de recherche dans le domaine de la CAO et du test : spécification, modélisation, ré-utilisation, partitionnement entre logiciel et matériel, optimisation de performances, vérification, validation, test intégré..etc. Les recherches dans ces domaines ont pour objectif de proposer des solutions innovantes pour concevoir les systèmes intégrés futurs. Le département Microélectronique travaille depuis de nombreuses années dans ces domaines et possède donc maintenant une expérience solide. Ses activités de recherche concernent la plupart des aspects de la conception et du test de ces Systèmes Intégrés et Micro-Systèmes en insistant plus particulièrement sur les aspects modélisation et méthodologie. Les projets de recherche menés au cours des quatre années de référence s’articulent autour de quatre grandes thématiques qui sont :
• Conception de systèmes intégrés
• Synthèse physique submicronique
• Test de circuits et systèmes intégrés
• Conception et test de micro-systèmes Ces quatre thématiques correspondent à des activités verticales de recherche. Les aspects valorisation qui en découlent sont intégrés dans les projets de recherche et y sont donc décrits brièvement. Le schéma ci-après fournit une vue synthétique des activités de recherche du département. Il permet en particulier de montrer clairement les liaisons projets-thématiques ainsi que les interactions entre thématiques. Au 31 décembre 2001, le département de Microélectronique comprend 23 chercheurs permanents dont 14 enseignants-chercheurs (7 PR, 7 MdC), 8 chercheurs CNRS (3 DR, 5 CR) et 1 post-doctorant. Dans la période considérée, le département s’est renforcé de 1 chercheur CNRS et 2 Maîtres de Conférences. On compte en outre 31 doctorants.
95

Le département étant une équipe d’accueil de la formation doctorale SYAM (Systèmes Automatiques et Micro-électroniques) et plus particulièrement de l’option Systèmes Micro-électroniques, il accueille régulièrement une vingtaine d’étudiants de cette formation auxquels viennent s’ajouter des stagiaires des diverses composantes de l’UMII.
Les thèmes de recherche du département Microélectronique
Le bilan des quatre années 1998-2001
Au cours de la période considérée, les chercheurs du département ont publié un nombre important d’articles dans des revues internationales (46) ou des conférences internationales avec actes (302), sans parler des articles dans les colloques sans actes. Le tableau ci-après donne la répartition de la production sur les différentes années. On notera une bonne régularité de ces chiffres attestant de la constance et de la tenue de la production au fil des années mais surtout l'excellente qualité des congrès où nous avons publié nos travaux. Il faut aussi mentionner que le tiers environ des publications est réalisé en collaboration avec des organismes extérieurs français voire étrangers. Outre les articles, 3 habilitations à diriger des recherches et 32 thèses ont été soutenues. De plus, 2 brevets ont été déposés et un troisième est en préparation.
Micro-Systèmes
Test de CI et SI
Conception de S.I.
Synthèse Physique
Test des défauts Test des circuits reconfigurables Test intégré pour circuits mixtes, CAN, séquentiels, pipeline, mémoire de courant Méthodologie de test pour les PLL Test intégré de pannes temporelles Test intégré et apprentissage Test hiérarchique Test au niveau système Compression de données de test
Synthèse automatique de circuits numériques Modélisation des performances Assignation basse puissance Modélisation des Interconnexions Capacités Parasites et Interconnexions Synthèse physique durcie aux radiations Composants analogiques à faible courant
Fiabilité des sytèmes et micro-systèmes
Optimisation du rendement de conception des micro-systèmes Conception de micro-systèmes appliqués à la réalisation de micro-contacts RF
Architecture pour le traitement du signal Architecture reconfigurable
Evaluation et Prototypage Vérification et Validation
Test et optimisation basse puissance
Conception et test de micro- systèmes monolithiques
Synthèse de haut niveau et test
Images et Rétines
96

1998 1999 2000 2001
Revues Internationales / Ouvrages 14 11 8 13 Conférences Internationales avec Actes 62 90 69 81 Thèses de Doctorat 10 9 6 7 Habilitations à Diriger des Recherches - 2 1 - Brevets 1 - 1 en cours Président Général / Comité de Programme 1 2 3 3
Tableau récapitulatif de la production scientifique 98-01
Les membres du département font partie de très nombreux comités des programmes de conférences dont certaines sont les plus prestigieuses dans leur domaine telles que l’International Test Conference (ITC), Design And Test in Europe (DATE), VLSI Test Symposium (VTS), l’International Conference on Circuit Design (ICCD), l’International Conference on CAD (ICCAD), l’Asian Test Symposium (ATS), Field Programmable Conference (FPL), Fault Tolerant Computing Symposium (FTCS), ainsi que de nombreux workshops internationaux tels que HLDVT, ETW, LATW, IOLTW, IMSTW, PATMOS, DDECS... La dernière ligne du tableau ci-dessus souligne enfin que plusieurs chercheurs se sont vus attribués la charge soit de Président de Comité de Programme soit de Président Général de conférences internationales ce qui, bien sûr, constitue une reconnaissance importante du rayonnement scientifique. Ainsi, le département a entièrement organisé ces dernières années 3 conférences internationales à Montpellier : International Mixed Signal Testing Workshop (IMSTW2000), International Conference on Design of Circuits and Integrated Systems (DCIS2000), International Conference on VLSI (VLSI2001).
Le département est également fortement impliqué et actif dans la vie et l’animation de la communauté scientifique nationale par le biais de nos instances de tutelle en occupant des postes comme membre junior de l’Institut Universitaire de France, conseiller au Ministère CSRT, Vice-Président du CNFM, membre du CNU. Le LIRMM est le principal support du pôle CNFM (Comité National de Formation en Microélectronique) de Montpellier. En plus de sa mission d’aide à la formation au niveau local (Ecole d'ingénieurs ISIM-MEA, Formation doctorale SYAM, maîtrise et licence EEA...), le pôle CNFM de Montpellier assure la gestion de 2 plate-formes technologiques d’intérêt national:
• Centre de Ressources en CAO du CNFM qui assure l'interface entre les fournisseurs de logiciels de CAO microélectronique et les pôles CNFM. Cette plate-forme CAO gère à l'heure actuelle un parc logiciel de 2000 licences d'utilisation dans plus de 50 sites des 11 pôles du CNFM. Ces licences sont utilisées par un nombre croissant de laboratoires de recherche.
• Centre de Ressources en Test du CNFM : en 1997, le CNFM a décidé de se doter d’un centre commun de formation dans le but de développer de façon significative l’enseignement à distance du test industriel (caractérisation, production) pour les étudiants et élèves-ingénieurs, ainsi que le développement de programmes de test pour les circuits conçus dans le cadre des projets de recherche des laboratoires. Le LIRMM, au travers de son département de Microélectronique, a été choisi par le CNFM comme site d’implantation pour ce centre. Pour assurer l’accès à un test de composants performant, le CRTC dispose depuis septembre 1997 d’un outil de test exceptionnel, le testeur HP83000, et depuis avril 2001 d’un deuxième testeur, le HP93000.
Nos relations avec les acteurs de la recherche sont excellentes puisque nous entretenons des relations contractuelles suivies avec les grands groupes industriels nationaux et internationaux tels que PHILIPS, THOMSON, ALCATEL, INFINEON, SIEMENS, ATMEL, SCHNEIDER, DASSAULT, INTEL ainsi qu’avec les grands groupes institutionnels tels que le CNES, CNET, l’Aérospatiale, France Télécom à travers des partenariats directs, des projets européens (MEDEA, MEDEA+), des programmes nationaux (GDR GAPs, GDR CAO, JEMSTIC..), des conventions CIFRE ou BDI CNRS…
97

Enfin, différents projets en collaboration avec d’autres départements/disciplines du LIRMM ont émergé au fil des années, témoins d’une volonté certaine de pluridisciplinarité. Il s’agit de projets avec le département IFA relatif à l’Arithmétique des ordinateurs, avec le département de Robotique relatif à l’électro-stimulation fonctionnelle ou à la commande de processus via le réseau.
98

Conception de systèmes intégrés (SOC)
Permanents : G. Cambon, G. Cathebras, C. Dufaza, J. Galy, M. Robert, B. Rouzeyre, L. Torres Les activités abordées dans cette thématique concernent l’étude des architectures de circuits intégrés et, plus largement, de systèmes sous différents aspects. Ces études se situent dans les domaines suivants :
• la conception d'architectures de circuits intégrés reconfigurables ou non, spécialisés dans le domaine du traitement du signal et de l’image avec une prise en compte de l'adéquation entre algorithme et architecture.
• les méthodes de conception, la validation et la vérification de systèmes complets sur silicium, systèmes constitués aussi bien de composants standards ("IP Cores") que de composants spécifiques.
Les projets en cours concernent les sujets suivants :
• évaluation fonctionnelle et prototypage de systèmes sur silicium
• vérification et validation de systèmes sur silicium
• adéquation Algorithme-Architecture-Silicium pour le traitement d'images
• architectures reconfigurables dynamiquement pour le traitement du signal et des images
• capteurs d’images et rétines en technologie CMOS
• méthodologie de prototypage de systèmes analogiques
Evaluation fonctionnelle et prototypage de systèmes sur silicium (SOC)
Travaux de : G.Cambon, M.Robert, L.Torres, L. Prunet, S.Raimbault (11/97-11/00), G.Pelissier (11/98-11/01). Collaborations : France Telecom, ST Microelectronics Les méthodes de conception conjointe matériel-logiciel proposées dans la littérature s’adressent essentiellement à une cible ASIP, et aujourd'hui encore peu de méthodes existent au niveau système. Sachant que les solutions architecturales et les performances atteintes dépendent du découpage de l’algorithme à embarquer, il nous est apparu nécessaire de créer un environnement qui permette au niveau le plus élevé d'évaluer les solutions pour éliminer au plus tôt celles qui ne sont pas adaptées à l'application. Ces évaluations permettent de choisir les différents cœurs de processeurs ou autres IPs en les simulant dans le système global, ce qui offre une approche efficace pour la réutilisation. Le modèle de système que nous avons retenu est un modèle globalement asynchrone et localement synchrone. Ce modèle offre de réelles facilités en termes de modularité pour supporter la réutilisation, et correspond au comportement de systèmes multi-processeurs. Enfin, il nous permet d'adopter une méthode d'implantation incrémentale des modules, du niveau fonctionnel vers le niveau virtuel, puis vers le niveau réel. Cette méthode incrémentale facilite la détection et la localisation des erreurs de conception puisqu’un seul module migre à chaque fois. La spécification de l'application est donnée sous la forme d'un algorithme codé en C (MPEG2 dans notre étude). Les solutions partitionnées sont évaluées dans un environnement de prototypage fonctionnel. Dans un premier temps, les synchronisations et communications entre modules sont établies et vérifiées sans dimension
99
temporelle. Lorsque ces synchronisations sont convenables, des évaluations de performances sont introduites. Le comportement de chaque module étant défini comme un processus codé en C, une implantation sur cœur de processeur est directement possible. Le développement du code de chaque processus est en fait une phase de développement logiciel. Les évaluations de performances d'un code sur un processeur sont alors mises en œuvre. Nous avons développé deux techniques pour cela ; elles reposent sur une analyse du code au niveau des blocs de base et des techniques de profiling. La première est une méthode destinée au choix de processeur qui évalue d'après les traces de profiling d'une exécution sur un hôte de simulation le temps nécessaire à la même exécution sur un processeur cible. La précision de cette technique est de l'ordre de 15% pour le DSP que nous avons évalué (STMd950), mais avec un temps d'évaluation un million de fois plus rapide que l'ISS du DSP, qui est lui-même 100 fois plus rapide que le modèle VHDL du processeur. Avec G. Pélisser (boursier CIFRE chez ST Microélectronics), nous étudions un flot « fast prototyping » basé sur l’outil COWARE. Le but est de mettre au point une plate-forme commune de développement du matériel et du logiciel et donc de combler le vide entre spécification et implantation. En amont de l’outil COWARE, des liens sont développés avec des outils de haut niveau (VCC, Esterel, Arexys). De même la liaison avec l’aval (Synopsys, émulation) est améliorée avec des outils de type C2VHDL. Ces résultats ont été publiés, entre autres, à la conférence DATE’2001.
Vérification / validation
Travaux de : B. Rouzeyre, L. Torres, R. Solaiman (10/01-10/04) Malgré les techniques et outils de CAO, la conception d'un circuit microélectronique reste une activité longue et coûteuse. Les erreurs aussi bien humaines que présentes dans les logiciels de conception se révèlent donc catastrophiques. La pratique courante, consistant à s'assurer que le circuit obtenu correspond bien à sa spécification par simulation, ne permet que d'explorer partiellement l'espace de simulation et ne permet généralement pas d'analyser les causes de dysfonctionnements. A contrario, les techniques formelles de vérification permettent de pallier en partie ces inconvénients. Aussi les industriels de la CAO et les utilisateurs manifestent-ils un grand intérêt pour ces techniques émergentes. Un quadruplement du chiffre d'affaire lié à cette technologie est prévu pour la période 1999-2003. Nous avons démarré un nouveau projet dans ce domaine au cours de l'année 2001. Nos travaux ont plus particulièrement porté sur :
• l'utilisation de techniques de programmation par contraintes pour résoudre les problèmes d'équivalence aussi bien entre deux implantations qu'entre une spécification et une implantation. Cette technique s'affirme déjà comme une alternative intéressante aux techniques basées sur les BDDs.
• le développement d'un nouveau modèle de représentation des circuits numériques (appelé Taylor Expansion Diagram ou TED) permettant de rassembler dans un même formalisme des descriptions algébriques et logiques.
Ces travaux ont été effectués en collaboration avec le Prof. M. Ciesielski de l'université de Amherst (USA) venu passer une année sabbatique au LIRMM. Nos études futures porteront sur les problèmes d'équivalence des circuits séquentiels et s'effectueront dans le cadre d'une action spécifique CNRS-STIC et en collaboration avec un industriel.
100

Adéquation algorithme-architecture-silicium pour le traitement d’images
Travaux de : M. Robert, L.Torres, C. Diou (11/97-11/00), C. Tisse (09/00-09/03)
L'objectif de ce projet est l'étude de l'intégration matérielle d'algorithmes de traitement du signal et de l'image (TSI). Ces travaux ont débuté il y a une dizaine d'année par l'étude et la réalisation de circuits spécifiques (ASIC) pour des applications orientées filtrage numérique (détection de contours d'images bruitées), classifieurs, et plus généralement de circuits paramétrables pour le TSI. Ces dix dernières années, une technique d'analyse du signal a acquis une reconnaissance grandissante dans la communauté scientifique internationale, de par ses qualités intrinsèques : la transformée en ondelettes que l'on peut considérer comme une évolution de la transformée de Fourrier. Associée à l'analyse multi-résolution, elle permet l'observation des images d'une manière jusqu'alors très peu employée : l'analyse ne se limite plus à l'image telle qu'elle nous apparaît, mais permet l'étude des objets présents dans l'image à différentes échelles. Un des points fort de ce travail concerne l’adéquation algorithme/architecture appliquée à la compression d’images en temps réel en utilisant des techniques originales de traitement par ondelettes. Cette étude a permis d’établir une architecture d’un cœur spécialisé traitement du signal par ondelettes permettant d’améliorer notablement le taux de compression d’images numériques.
Cette étude sera poursuivie afin d’améliorer la chaîne de traitement, notamment les blocs de quantification et de codage arithmétique que l’on retrouve dans l’architecture générale d’une chaîne de compression. Par ailleurs, des travaux avec la société ST Microélectronics concernant l’identification biométrique ont débuté en septembre 2000 (thèse de C. Tisse).
Signald’entrée
Coefficientsde details
Coefficientsd’approximation
P = PredictionU = UpdateSplit P U
+
-
s j + 1
sj
dj
s nj
21+
s nj
2 11+
+
MergePU
+
-
sj +1
s j
d j
s nj
21+
s nj
2 11+
+
-1 -1
Directe Inverse
Transformée en ondelettes (Lifting Scheme)
101

Architectures reconfigurables dynamiquement pour le traitement du signal et des images
Travaux de : J. Galy, L. Torres, G. Cambon, G. Sassatelli (10/99-10/02), P. Benoît (09/01-09/04) Un œil attentif sur les applications qui seront disponibles dans les réseaux futurs révèle une caractéristique importante. Ces applications sont orientées « données » et ne nécessitent que peu de contrôle sur les flots de données à traiter ; l’impératif essentiel étant un volume important d’opérations arithmétiques à réaliser en temps réel.
D-node
+
*RRRAAAMMM
ALU + MULT
Reg FILE
A B
S
RISC
Node
Switch Switch
SwitchSwitch
SwitchSwitch
D-Node D-Node
D-Node D-Node
D-Node D-Node
D-Node D-Node
D-Node D-Node
D-Node D-Node
D-Node D-Node
D-Node D-Node
Sw
Sw
LAYER n
LAYER n+1
LAYER n-1
Le Dnode
Dans ce contexte, l’approche utilisée consiste à implanter un réseau reconfigurable à granularité déplacée ; la cellule de base, appelée Dnode(Data node), est apte à effectuer un éventail d’opérations principalement arithmétiques. A l’image d’un FPGA, chaque Dnode (Datapath nœud) possède un certain nombre de bits de configuration qui définissent sa fonctionnalité à un instant donné. L’ensemble des configurations de tous les Dnodes du réseau reconfigurable sont stockées dans le plan mémoire, qui est une RAM, et la configuration globale du réseau évolue en cours même de traitement. Un processeur de type RISC à jeu d’instruction adapté gère ces écritures, donc la reconfiguration dynamique. De plus, nous adoptons une disposition particulière facilitant le transfert des données pour les applications orientées flot de donnée. L’ensemble de la structure prend la forme d’un anneau, car rebouclé sur lui-même, le flot de donnée est « tournant ». Cette architecture a été primée lors de la conférence « IP based SoC design » en décembre 2001.
Capteurs d’images et rétines en technologie CMOS
Travaux de : G. Cathébras, G.Cambon, M. Robert, L.Torres, D. Navarro (11/00-11/03)
Dans ce projet, nous étudions la faisabilité, sur un même substrat silicium, de dispositifs d’imagerie assurant simultanément la capture de l’image et un traitement de cette image (rétine). Les travaux menés en 1999-2000 ont conduit à la fabrication de deux prototypes : un détecteur linéaire de mouvement assurant une mesure d’une composante du champ de vitesse de l’image qu’on lui projette, et une rétine de reconnaissance d’image. Le premier prototype est destiné à équiper un micro-aéronef développé par l’équipe de Neurocybernétique du Laboratoire de Neurobiologie (CNRS, Marseille) dans le cadre du projet Micro-Systèmes du CNRS. Le second prototypage est une rétine
L’architecture en anneau
102
d’intercorrélation breveté en 1999 par l’Université de Bourgogne (auteurs : MM Gorria, Lamalle et Cathébras) mais résultant d’une collaboration LIRMM-LE2I. Par la suite, nous avons développé, à des fins d’expérimentation, un imageur de 213x160 pixels fonctionnant en mode d’intégration. Cet imageur sera intégré, dans le courant 2002 dans un montage de validation de techniques de traitement d’images. Nous nous orientons maintenant vers l’intégration d’une rétine de calcul du flot optique utilisant la transformée de Census. Les premiers résultats, en cours de publication, concernent la faisabilité de cette intégration avec une surface de silicium raisonnable.
Prototypage de systèmes analogiques
Travaux de : C. Dufaza, G. Cambon, L. Torres, S. Colançon (11/98-11/01)
Moins connus que les composants numériques programmables type EPLD et FPGA, le domaine analogique bénéficie lui aussi de composants équivalents avec les FPAA (Field Programmable Analog Array). Au niveau industriel, des sociétés comme ANADIGM et LATTICE commercialisent ces composants analogiques ainsi que des cartes d'expérimentation. Ainsi, en bâtissant un réseau de composants de ce type, les concepteurs microélectroniciens disposent d'un support pour étudier des systèmes analogiques programmables et performants. Il est donc nécessaire de définir précisément une méthodologie de prototypage analogique autour de ces nouveaux moyens de conception. Cela implique naturellement plusieurs domaines tels que la modélisation à l'aide de langages comme VERILOG-A ou VHDL-AMS, la simulation mixte analogique/numérique à plusieurs degrés de précision ainsi qu'une communication avec des outils systèmes tels que SPW de la société CADENCE. Cette méthodologie de conception analogique doit permettre à terme de prototyper rapidement des systèmes analogiques nécessitant une souplesse de programmation nécessaire à l'évaluation de plusieurs architectures. Un champ d’application type de ces travaux peut être illustré par un ensemble de capteurs fournissant par multiplexage temporel différentes mesures à une électronique analogique commune mais programmable (gains, filtrage, etc.), avant numérisation et transmission à distance, par exemple sur le réseau Internet.
103

Synthèse physique submicronique
Permanents : D. Auvergne, N. Azémard, D. Deschacht, C. Dufaza, C. Landrault, L. Latorre, P. Nouet, M. Robert, F.M. Roche. Les technologies CMOS submicroniques actuelles permettent de grandes densités d’intégration, ce qui implique un contrôle précis des caractéristiques des composants que l’on intégre. L’ensemble de ce travail de recherche s’articule donc autour de la synthèse au niveau transistor, en privilégiant les aspects relatifs aux performances, aux interconnexions et aux techniques d’assignement indépendantes de la technologie. Sont aussi abordés les problèmes de tenue aux radiations. C'est dans ce contexte aux multiples facettes que sont menés les différents projets de cette thématique qui s'appuie sur la longue expérience du département Microélectronique dans les aspects modélisation, caractérisation et optimisation :
• modélisation des performances en technologie CMOS submicronique,
• assignement technologique faible puissance,
• synthèse à l’aide de bibliothèques numériques virtuelles,
• caractérisation et modélisation des capacités d’interconnexions,
• interconnexions et effets parasites associés,
• synthèse physique durcie aux radiations,
• modélisation et conception de composant analogique faible courant,
• fiabilité des systèmes et micro-systèmes.
Modélisation des performances en technologie CMOS submicronique
Travaux de : D. Auvergne, N. Azemard, M. Robert, P. Maurine (10/98-04/01), M. Rezzoug (10/97-12/00), F. Picot (10/98-10/02), C. Papaix (11/99-11/02) Collaborations : Infineon, Atmel, Université de Barcelone, INP de Grenoble, Atmel, Université de Porto Alegre, PUCS, BULL, Thomson, Alcatel, MHS, Philips, LIP6. L’évolution rapide des procédés de fabrication CMOS, associée à la complexité croissante des structures à gérer, impose la définition et l’utilisation de métriques pour les performances. Ces métriques doivent servir d’indicateurs robustes au concepteur, permettant d’évaluer les différentes alternatives à chaque étape du flot de conception. En étudiant l’aspect physique du processus de commutation des structures CMOS nous avons développé des métriques pour évaluer et comparer les performances. Dans un premier temps, ces métriques ont été définies pour permettre :
• de caractériser la vitesse spécifique des procédés de fabrication,
• d’évaluer l’efficacité des structures en terme de charge et contrôle de temps de transition,
• de déterminer la sensibilité aux variations de température ou de tension d’alimentation. Dans un deuxième temps, une deuxième génération de modèles a été développée et validée sur un process 0.18 µm. Ces modèles sont utilisés pour modéliser les performances de portes complexes. Le modèle complet a été intégré dans un analyseur de chemins (POPS) permettant l’évaluation et l’optimisation de performances de blocs logiques.
105

Dans un troisième temps, nous nous sommes intéressés aux performances en terme de puissance. Le développement d’applications portables, ainsi que la forte augmentation de la densité d’intégration imposent le développement de techniques de conception faible puissance applicables à tous les niveaux de la conception. Au niveau physique, la réduction de la composante de court-circuit, bien souvent négligée apparaît être un élément par lequel des économies substantielles peuvent être réalisées. Nous avons utilisé un modèle orienté conception de la composante de dissipation de puissance de court circuit. Ce modèle, basé sur un concept précédemment développé de capacité équivalente, permet une comparaison directe des composantes de puissances principalement considérées comme prépondérantes dans les structures CMOS : la composante dynamique externe associée à la charge et décharge des capacités de sortie des portes, et la composante dynamique interne produite par le courant de court circuit s’écoulant dans les structures entre les transistors P et N pendant la variation du signal d’entrée de la structure. Afin de définir, au niveau des cellules, des critères faible puissance pour la conception de buffers et répéteur, nous avons développé un modèle orienté conception de la composante de puissance de court circuit. Nous avons développé une représentation linéaire du modèle de cette composante. La validation de cette approche a été réalisée sur les process 0,25 et 0,18 µm. Un effort tout particulier a été apporté à la modélisation des réseaux séries de transistors par un transistor équivalent ayant les mêmes possibilités en courant que le réseau initial. L’intégration de ce modèle dans une méthodologie de conception permet d’obtenir de réels avantages en autorisant la définition de compromis entre composante de dissipation de court circuit et composante capacitive, de définir des règles faible puissance de sélection de cellules et des métriques pour la gestion du compromis vitesse-puissance. L’application de ces résultats est faite dans le cadre de deux thèses CIFRE en partenariat avec ATMEL (F. Picot, C. Papaix). Ces travaux portant sur la caractérisation de bibliothèque et l'optimisation de plans mémoires ont donné lieu à de nombreuses publications.
Assignement technologique faible puissance
Travaux de : N. Azémard-Crestani, D. Auvergne, S. Léger-Crémoux (10/95-10/98), M. Aline (10/98-10/01), X. Michel (10/00-10/03), A. Richard (01/99-06/02) Collaborations : Infineon, Université de Barcelone, INP de Grenoble, Atmel, BULL, Thomson, Alcatel, MHS, Philips, LIP6. La synthèse de circuits impose d'obtenir des évaluations de performances (en termes de vitesse ou de puissance) avec une précision voisine des performances réelles. Afin d’assurer la validation des techniques d’optimisation de circuits, des critères sont en cours de définition pour contrôler la vitesse et la puissance de chemins combinatoires. Ceci nous conduit à identifier un certain nombre de sujets à développer :
• identification de chemins pour l'optimisation et la vérification temporelle,
• définition et évaluation de la criticabilité d'un chemin pour différentes alternatives de vitesse,
• application de l'évaluation des performances aux différentes stratégies d'implantation utilisant des portes simples ou complexes (ANDORI),
• définition de techniques d'accélération ou de ralentissement de chemins pour l'implantation de circuits digitaux en limite de vitesse.
Le développement d’une technique d'énumération de chemins a permis d'élaborer et d'appliquer différentes stratégies d'optimisation aux portes appartenant aux chemins les plus longs (optimisation du retard) ou les plus courts (optimisation de la puissance). Parmi ces stratégies, on trouve par exemple, le redimensionnement ou l'ajout d'étages tampons.
106
Ces résultats ont permis la réalisation d'un module d'évaluation et d'optimisation de chemins : POPS (Performance Optimization by Path Selection). Ces travaux ont été validés par comparaison aux outils industriels EPIC (PathMill et AMPS). Le module POPS considéré comme un démonstrateur des modèles d'évaluation de performances pour les technologies submicroniques, a été développé dans le cadre d'un projet EUREKA MEDEA : "Advanced tools for deep submicron design" (partenaires BULL, Thomson, Alcatel, MHS, Philips, LIP6, LIRMM). Cet outil est en cours de développement avec :
• la prise en compte de la composante de puissance interne,
• le traitement des portes complexes (ANDORI),
• le traitement des logiques non statiques,
• la budgétisation de retards. Ce démonstrateur fait partie intégrante de la chaîne de synthèse physique TROPIC développée au laboratoire (cf. projet "Synthèse de circuits numériques : bibliothèques virtuelles"), tout en restant compatible avec tout logiciel de placement-routage (outils CADENCE par exemple). L’utilisation de cet outil dans une chaîne de CAO industrielle est faite dans le cadre d’une bourse CIFRE en partenariat avec Infinéon (A. Richard).
Synthèse de circuit numérique : bibliothèque virtuelle
Travaux de : M. Robert, D. Auvergne, A. Landrault (12/00-12/03), L. Pellier (01/01-01/04) Collaborations : Infinéon (Sophia-Antipolis), Prof. F. Moraes (Université Porto Alegre, Brésil) Le concept de ré-utilisation de parties matérielles a tendance à se généraliser aujourd'hui. Un système complexe sur une puce (SOC) comprend ainsi aujourd'hui un ensemble de fonctions matérielles ou logicielles réalisées à partir d'un ensemble de macrocellules (cœur de processeur, mémoire, périphériques, ...), des blocs spécifiques à l'application et éventuellement des blocs personnalisés par l'utilisateur. Dans ce contexte, l’approche traditionnelle “bibliothèque de cellules pré-caractérisées” apparaît insuffisante : les avantages bien connus (sécurité de conception et prédiction de performances relativement précise par construction) sont pondérés par un certain nombre de contraintes : l'utilisation de cellules pré-caractérisées limite les choix lors de l'assignation, les performances électriques sont figées par construction, la maintenance des bibliothèques est lourde et coûteuse. Ce dernier point est aujourd’hui un problème important pour l’industrie de la microélectronique compte tenu des changements rapides de technologie. De nouvelles approches de synthèse physique sont donc à imaginer. Un bloc de cellules pré-caractérisées L’objet de ce projet est le développement de méthodologies et d’outils de synthèse automatique du dessin de masques des circuits intégrés CMOS submicroniques, sans utilisation de bibliothèques de cellules (librairies "virtuelles"). Cette approche permet un ajustement continu des performances électriques. Plusieurs axes sont explorés :
• nouvelles topologies de dessin de masques,
• utilisation de portes complexes, optimisation de performances,
• gestion de la complexité et de la prédiction de performances des blocs,
107

• liaison avec la CAO industrielle. Ces recherches font l’objet d’un partenariat avec la société Infinéon (Sophia Antipolis). Dans ce contexte, deux étudiants (A. Landrault - BDI CNRS, L. Pellier - CIFRE) ont débuté une thèse de doctorat à la fin de l’année 2000. Les travaux récents ont été consacrés à la définition d’un flot de conception exploitant le concept de cellules virtuelles, à la validation pour des technologies CMOS submicroniques, et à l’étude de techniques permettant une optimisation des performances électriques.
Caractérisation et modélisation des capacités d’interconnexions
Travaux de : C. Landrault, P. Nouet, D. Bernard (10/97-10/00) et A. Toulouse (10/94-10/98) Il est aujourd’hui couramment admis dans les communautés scientifique et industrielle que les performances des circuits intégrés sont très fortement dépendantes des éléments parasites induits par les interconnexions, tant au niveau de la cellule élémentaire qu’au niveau du circuit complet. L’Association des Industries du Semi-conducteur (SIA) place en tête de ses priorités dans la rubrique Modélisation et Simulation, l’extraction des composants parasites dus aux interconnexions. C’est au début des années 90 que nous avons débuté nos travaux relatifs aux interconnexions. Après avoir été parmi les premiers à mettre en évidence les imperfections et les limitations des modèles utilisés dans les outils d’extraction de composants parasites, nous avons proposé une méthode de caractérisation permettant la mesure de capacités de très faible valeur (femto-Farad). Ces travaux ont constitué l’essentiel de la thèse de doctorat d’A. Toulouse, aujourd’hui ingénieur R&D au sein de la société Dolphin-integration à Grenoble.
Nous avons ensuite concentré nos efforts sur la modélisation des couplages capacitifs au sein des circuits intégrés à très haut niveau d’intégration. En utilisant largement la méthode de mesure précédemment développée et en associant l’utilisation de solveurs de champs 2D et 3D, nous avons proposé des modèles analytiques génériques pour une famille de technologies mais paramétrables pour une technologie particulière. Trois modèles indépendants ont été jugés nécessaires pour couvrir les différents cas de figure rencontrés dans un circuit intégré. Ces modèles offrent une très nette amélioration de la précision par rapport aux estimations que peuvent fournir les modèles précédemment publiés. D. Bernard a soutenu sa thèse de doctorat sur cette thématique à la fin de l’année 2000. Il est actuellement ingénieur chez Atmel à Rousset. Les perspectives de cette activité pour les années à venir concernent l’utilisation des modèles proposés afin de définir des règles de conception pour les interconnexions de grande dimension (bus par exemple). En effet, seuls des modèles analytiques peuvent permettre une optimisation basée sur une approche mathématique.
Interconnexions et effets parasites
Participants : D. Deschacht, E. Vanier (10/95-10/98), G. Servel (10/98-10/01), A. Lopez (10/01-10/04) Collaborations : E. Paleczny et J.F. Légier (IEMN), F. Huret, F. Saliou et J.F. Mattei (LEST) Les interconnexions constituent actuellement le point bloquant pour l’amélioration des performances des circuits digitaux à très haute densité d’intégration. Une conception maîtrisée des circuits VLSI nécessite que l’on s’assure de l’intégrité des signaux. Le premier travail a eu pour vocation d’évaluer le niveau de modélisation nécessaire à la représentation des effets parasites (couplage, variation de la propagation induit par couplage…) dans les circuits intégrés sur silicium, c’est à dire la représentation minimale à la description du phénomène physique. Pour cela une approche électromagnétique est nécessaire. C’est pourquoi une collaboration avec l’IEMN et le LEST a été initiée. Pour déterminer les caractéristiques de propagation, nous avons proposé la mise en œuvre d’une méthode d’éléments finis à éléments d’arêtes en deux et trois dimensions. Nous avons établi les
108

limites de validité du modèle RC et défini les configurations nécessitant l’utilisation d’un modèle RLC. Si les outils de simulation sont actuellement disponibles pour l’étude de la ligne isolée, il nous a fallu mettre au point les outils d’extraction de l’inductance et de l’inductance mutuelle dans le cas des lignes adjacentes. Nous avons alors défini une formulation analytique de la tension de diaphonie (crosstalk) dans le cas de une, deux ou quatre lignes adjacentes, attaquées par des portes logiques de dimensions différentes, ainsi que le couplage partiel sur une seule partie de la ligne. Nous avons mis en évidence les effets inductifs dans le couplage. L’introduction de matériaux comme le cuivre, les diélectriques à faible permittivité, associés à la diminution constante des temps de commutation des signaux, implique un encombrement spectral de plus en plus étendu de signaux. Les effets cumulés de ces deux tendances accentuent la complexité des phénomènes de propagation au niveau des lignes d’interconnexion et des phénomènes de couplage associés. Nous étudions actuellement l’impact de nouvelles solutions technologiques en continuant à modéliser les effets parasites pour prédire leurs conséquences sur les performances et pour établir des règles de dessin permettant de s’en affranchir.
Synthèse physique durcie aux radiations
Travaux de : F.M. Roche, L. Salager (10/94-01/99), T. Monnier (10/96-10/99), J.M. Dutertre (10/00-10/03), R. Perez (01/01-01/04) Collaborations : Université de Grenoble (TIMA), Université de Bordeaux (IXL), Société iRoC Technologies Le projet Synthèse physique durcie aux radiations s'intéresse aux dispositifs et circuits logiques et analogiques destinés à opérer en milieu hostile. Ce milieu peut être l'espace ou la haute atmosphère (aéronautique) mais également l'environnement terrestre habituel comme montré récemment. La finalité du projet est d'élaborer des méthodes de durcissement par conception aisément intégrables améliorant la robustesse des systèmes sans faire appel à des solutions technologiques. Son champ d'application s'est élargi aux circuits submicroniques et programmables de nouvelle génération devenus indispensables à l'électronique embarquée (aéronautique, spatial) ainsi qu'à l'électronique terrestre sensible requérant un haut degré de fiabilité (médical, nucléaire, portable). L'objectif du projet est donc l'élaboration de solutions de conception de circuits assurant la robustesse des blocs fonctionnels aux effets perturbateurs identifiés. On se propose de concevoir des évaluateurs et des circuits prototypes tolérants. Ainsi, nous avons pu montrer que la conception de blocs fonctionnels robustes est réalisable pour les circuits logiques. Pour les circuits analogiques, le défi se limite au maintien des spécifications dans des marges pré-définies. Depuis quatre années, nous avons poursuivi les études d'évaluation et de simulation des dégradations (critères, seuils) sur des structures fondamentales. Elles nous ont fourni un modèle de contraintes pour les grandeurs analogiques conditionnant l'état des niveaux logiques de sortie et les marges de bruit. Un résultat important a été mis en évidence avec l'identification des paramètres sensibles à l'effet de dose dans les inverseurs en technologie CMOS submicronique. Ceci nous a permis de proposer une structure compensant la sensibilité à l'effet de dose (L. Salager). Un autre axe de recherche a aussi été mené à son terme. Il concernait l'étude du durcissement de points-mémoires SRAM aux aléas radiatifs (SEU). Plusieurs principes de conception robustes présentant un fonctionnement sûr en présence d'ions lourds ont été définis. Cette étude a été validée par des tests au Californium. Depuis, deux circuits originaux durcis dès la phase de conception ont été réalisés. Implémentés en registres à décalage, testés et validés au Synchrotron de Berkeley, ils ont fait définitivement la preuve de la faisabilité de la méthode de durcissement aux ions lourds par seule conception (T. Monnier). CAN durci Ces blocs durcis ont tout naturellement trouvé une application comme étages dans un convertisseur analogique numérique rapide (CAN Flash) durci élaboré peu après. La réalisation de ce CAN nous a amené à effectuer conjointement les durcissements à l'effet de dose et aux aléas, imposant aussi de résoudre les problèmes nés de la présence simultanée d'étages analogiques et logiques (étages
109

d'entrée, horloge et encodeur). Ce travail a ainsi permis de valider plusieurs méthodes de durcissement inédites : par restructuration du circuit, par intégration d'une logique corrective au sein de la partie logique et par optimisation du dimensionnement de l'étage analogique (Th. Monnier). Enfin, profitant de notre expertise en matière de SRAM et de Flip-flop robustes, nous avons poussé nos investigations vers le durcissement de circuits FPGA reconfigurables à base de SRAM. Ceux-ci constituent actuellement une solution technologique de plus en plus recherchée par les concepteurs de systèmes embarqués (SoC). Ce travail, qui a donné lieu à des avancées significatives en matière de définition de macro-cellules tolérantes, se poursuit actuellement (J.M. Dutertre). Ces travaux ont fait l'objet de nombreuses communications notamment aux deux évènements internationaux majeurs traitant spécifiquement du domaine des radiations IEEE-NSREC et RADECS et dans la revue IEEE-Transaction on Nuclear Science. Depuis 2001, un nouveau thème a été initié en collaboration avec la société iRoC Technologies. Il concerne le développement d'outils logiciels de CAO destinés au durcissement automatique des circuits logiques dès la phase de conception (R. Perez).
Modélisation et conception de composant analogique faible courant
Travaux de : D. Auvergne, C. Dufaza, S. Laville (12/99-12/02), W. Rahajandraibe (09/99-09/02) Collaboration : ST-Microelectronics (division Discrete and Standard Linear Group) Ce projet de recherche s’inscrit dans le cadre d’un contrat avec la société ST Microelectronics, division DSG – Discrete and Standard Linear Group. Les raisons qui motivent cette recherche se résument simplement par la nécessité d’améliorer les performances des composants analogiques linéaires : amplificateurs opérationnels, références de tensions, etc. Les performances de ces circuits, dans le contexte industriel, sont bien entendu inter-dépendantes et leur optimisation nécessitent des recherches avancées sur plusieurs points, parmi lesquels :
• la théorie des composants bipolaires et MOS à faible courant de polarisation,
• l'extraction ciblée des paramètres de la technologie,
• la définition de nouvelles cartes modèle pire cas,
• la prise en compte de ces paramètres dans les simulateurs électriques nouveaux modèles,
• la conception de nouvelles cellules test,
• les techniques intégrées d'ajustement des composants. Cette recherche, menée en étroite collaboration avec les ingénieurs de notre partenaire industriel, a permis notamment dans le cadre de deux thèses de doctorat, la conception, la fabrication et le test de plusieurs circuits prototypes qui ont conduit à améliorer les performances des circuits commercialisés. Ces travaux ont donné lieu à plusieurs publications de niveau international et au dépôt de 4 brevets par la société ST-Microelectronics. Au-delà des avancées scientifiques réalisées durant ce projet, la réelle synergie industrie/université et la confiance qui s'est développée entre les parties est très enrichissante.
110

Fiabilité des systèmes et microsystèmes sur puce
Travaux de : F. Azaïs, P. Nouet, L. Latorre, B. Caillard (11/00-11/03), M. Dardalhon (10/00-10/03) Ce projet fédère différentes activités conduites au laboratoire et dont le point commun est la fiabilité des systèmes sur puce au sens le plus large du terme, c’est à dire pouvant être composés indifféremment de logiciel, de matériel « classique » (électronique, analogique et numérique) et de structures électro-mécaniques. Un autre point commun à ces activités est la forte connexion avec le monde industriel. La première activité concerne la fiabilité des microsystèmes. Ce sujet constitue le sujet de thèse de M. Dardalhon qui bénéficie depuis octobre 2000 d’une bourse CNES co-financée par EADS L.V. Dans le domaine des microsystèmes tout reste à faire ou presque en ce qui concerne la fiabilité. En effet, peu de produits industriels existent et le recul sur les technologies utilisées est très faible. Nos objectifs sont de définir des véhicules de test et des procédures expérimentales pour caractériser la fiabilité intrinsèque de différentes technologies microsystèmes. A terme, nous espérons pouvoir définir des règles de conception permettant de garantir la fiabilité optimale d’un microsystème. La deuxième activité constitue le cœur du sujet de thèse de B. Caillard dans le cadre d’un contrat de collaboration de recherche avec ST Microelectronics Central R&D. Il s’agit de concevoir de nouvelles structures de protection contre les décharges électrostatiques (ESD) basées sur l'utilisation de thyristors. Les travaux réalisés ont porté dans un premier temps sur la caractérisation et la modélisation de thyristors (structures PNPN) implantés dans des technologies CMOS agressives (0.18 µm et au-delà). Il s’agit d'une part de définir de nouvelles structures basées sur ces composants et, d'autre part, de permettre la simulation électrique de telles structures afin d'évaluer leur efficacité pour la protection des circuits intégrés contre les décharges électrostatiques (ESD). Les résultats obtenus sont très encourageants et nous laisse espérer un impact important de nos travaux sur la stratégie de protection aux ESD de notre partenaire industriel. Un premier brevet est ainsi envisagé au début de l’année 2002. Dans les années à venir, une troisième activité devrait venir s’ajouter aux précédentes puisque nous sommes actuellement en cours de discussion avec ST Microelectronics à Rousset afin de démarrer une activité de recherche commune sur de nouvelles méthodologies d’aide au diagnostic pour l’analyse de défaillance et la localisation de défauts sur les circuits intégrés.
111


Test de circuits et systèmes intégrés
Permanents : F. Azaïs, S. Bernard, Y. Bertrand, C. Dufaza, M.L. Flottes, P. Girard, C. Landrault, S. Pravossoudovitch, M. Renovell, B. Rouzeyre. Les technologies microélectroniques ainsi que les chaînes de CAO actuelles permettent la conception de plus en plus rapide de circuits intégrés très complexes en termes de nombre d'éléments actifs. Cet accroissement en complexité joint à une nécessité croissante de réduire les temps de mise sur le marché ne peut pas se faire au détriment de la qualité du produit fini. Un circuit, qu’il soit très simple ou très complexe, doit être réalisé conformément à son dossier de fabrication pour être utilisable. C'est son test qui en est le garant. Le département de Microélectronique travaille dans cette thématique depuis de nombreuses années au cours desquelles nous nous sommes intéressés à des sujets très variés tels que : la modélisation des défauts, l’extraction des sites de pannes, la simulation de fautes, la génération automatique de vecteurs de test au niveau transistor interrupteur, l'équivalence de pannes, le test intégré de machines d'états finis, le test intégré de filtres numériques, le test et le diagnostic des fautes de délais, la synthèse pour le test. Aujourd’hui, suivant l'évolution générale des techniques et des connaissances, nous nous orientons vers des problématiques de test relatives aux sytèmes intégrés, aux circuits analogiques, mixtes, reconfigurables, pipeline, etc... Ces circuits sont maintenant réalisés dans des technologies fortement submicroniques avec des contraintes spécifiques de puissance, taille et vitesse. Au cours de ces quatre dernières années, les différents projets sur lesquels nous avons travaillé sont :
• le test intégré de circuit séquentiel, pipeline ou reconfigurable, de circuits mixtes, de convertisseur AN, de PLL, de circuits mémoire de courant,
• le test intégré de panne temporelle, le test orienté défaut,
• le test et l’optimisation faible puissance, l’apprentissage,
• le test au niveau système, le test hiérarchique,
• la compression de données de test,
• la synthèse et le test.
Test orienté défaut
Travaux de : M. Renovell, F. Azaïs, Y. Bertrand, J.M. Galliere (10/00-10/03) Collaboration : Professeur André Ivanov (University of British Columbia, Vancouver, Canada) L'étude en cours depuis plusieurs années concerne le problème de l’adéquation entre les modèles de fautes et les défauts réels en technologie CMOS. Cette étude a commencé par la définition d’un modèle de faute pour un défaut particulier : le circuit-ouvert sur une connexion de grille de transistor MOS appelé grille flottante. Après deux thèses sur ce sujet, l’étude s’est poursuivie avec une analyse d’un type tout à fait différent de défaut, les courts-circuits, mettant en évidence un nombre important de propriétés. Ces propriétés ont conduit à la définition d'un nouveau modèle de faute, appelé le modèle du "Vote Direct". Par la suite, nous nous sommes intéressés aux courts-circuits résistifs. Ce deuxième volet de l’étude a conduit à la définition d’un modèle original appelé le modèle "Paramétrique" prenant en compte la résistance aléatoire du court-circuit. L’expérience acquise depuis plusieurs années sur le comportement des défauts ainsi que sur les modèles de fautes qui les représentent, a permis de s’intéresser à la relation défauts/modèles de fautes en prenant en compte les paramètres aléatoires des défauts. L'étude envisagée maintenant
113

s’est fixée comme objectif de formaliser de manière générale les relations entre différents défauts tels que les grilles flottantes, les courts-circuits ou les percements de grille et les différents modèles de fautes existants. De plus, ce travail prend en compte les différentes techniques de test telles que le test en tension et le test en courant. Le travail d’analyse des relations défauts/modèles de fautes a permis de mettre en évidence l’importance, dans ces relations, des paramètres aléatoires des défauts. De nouveaux concepts capables de représenter les paramètres aléatoires des défauts doivent être proposés et considérés dans la relation avec les modèles de fautes. L’objectif est donc d’appréhender ces paramètres, dans un premier temps pour des défauts simples tels que les courts-circuits et dans un deuxième temps, pour des défauts plus complexes tels que les grilles flottantes et les percements de grille.
Test intégré de panne temporelle
Travaux de : P. Girard, C. Landrault, S. Pravossoudovitch, M Renovell, V. Moreda (10/95-10/98), A. Virazel (10/98-10/01), O. Heron (10/01-10/04) Collaboration : René David (Laboratoire d'Automatique de Grenoble) Ce projet porte sur la génération de vecteurs de test (TPG) et le développement de structures de test intégré (BIST) adaptées au test des pannes temporelles ou pannes de délais. Dans le cadre de ce projet, trois axes de recherche ont été développés :
• test intégré de pannes temporelles (1998-2001)
• test de pannes temporelles dans les circuits programmables (2001-2004)
• test intégré de pannes temporelles dans les mémoires (2001-2004)
En ce qui concerne l’axe « test intégré de pannes temporelles », les point suivants ont été abordés. Certaines caractéristiques, telles que par exemple le nombre de commutations, permettent de qualifier les séquences de vecteurs par rapport aux pannes temporelles. Il est ainsi possible de prévoir à priori (sans passer par la simulation de pannes) si un vecteur peut être un "bon" vecteur (vecteur couvrant beaucoup de pannes) ou un "mauvais" vecteurs (vecteur couvrant peu de pannes). A partir de ces informations, le but de cette étude était de déterminer comment générer une séquence de vecteurs couvrant au mieux les pannes temporelles et ceci, de manière la plus indépendante possible de la structure du circuit considéré. En effet, l'objectif n'était pas de développer un nouvel algorithme ou une nouvelle structure de génération déterministe de vecteurs de test mais plutôt d’explorer une approche de type aléatoire pondérée, l'idée étant de guider la génération aléatoire des vecteurs par des heuristiques prenant en compte les spécificités des conditions de détection des pannes temporelles. Après avoir exploré quelques voies et validé un certain nombre de solutions, nous nous sommes penchés sur l’aspect test intégré (BIST). Par le passé, un certain nombre de structures ont été utilisées (machines d'états, ROM,...), ou ont été développées spécifiquement (LFSR, automates cellulaires,...) pour générer les vecteurs de test de manière interne. Toutefois, aucune d'entre elles n'a été réalisée en considérant les spécificités des pannes temporelles. Leur efficacité n'a, en effet, été analysée que par rapport au modèle de panne de collage. Le but de cette étude a donc été d'adapter les structures existantes et/ou d'imaginer de nouvelles structures de manière à générer des séquences de vecteurs adaptées à la détection des pannes temporelles. Dans ce cadre, il était impératif de considérer l'aspect dynamique nécessaire à l'excitation des pannes temporelles. Ces travaux ont constitué l’essentiel de la thèse de V. Moreda soutenue le 13 novembre 1998. Cette étude s’est poursuivie dans le cadre de la thèse de A. Virazel, l'objectif étant le développement de générateurs intégrés de séquences de vecteurs adjacents. De façon générale, les générateurs intégrés produisent des séquences où les vecteurs successifs diffèrent de plusieurs bits (séquences MIC "multiple input change"). Or, il apparaît que dans le cadre du test des pannes temporelles, les séquences de vecteurs adjacents ou SIC ("single input change") sont particulièrement intéressantes. En effet, il a été démontré que, d’une part, elles sont suffisantes pour détecter toutes les pannes temporelles détectables de façon robuste et, d’autre part, qu'en réduisant les commutations multiples dans le circuit, elles assurent un meilleur taux de couverture "robuste". La première partie de cette
114

thèse a porté sur l'évaluation des capacités de détection de pannes des séquences SIC sur divers modèles de pannes (pannes temporelles mais également collages et court-circuits). Nous avons ainsi, d'une part mis en évidence l'intérêt de telles séquences par rapport aux séquence MIC et d'autre part, montré l'influence du caractère aléatoire des séquences de vecteurs de test sur la capacité de détection de ces séquences SIC. La suite de ces travaux a été consacrée aux développements de structures matérielles de génération de vecteurs SIC ayant de "bonnes" propriétés aléatoires. Ce travail, qui a été réalisé en collaboration avec le Laboratoire d'Automatique de Grenoble (R. David), a constitué l’essentiel de la thèse de A. Virazel soutenue le 14 novembre 2001. En ce qui concerne l’axe « test de pannes temporelles dans les circuits programmables », les points suivants ont été abordés. Le marché des circuits programmables prend actuellement une ampleur considérable. En effet, ils constituent aujourd’hui une solution technologique particulièrement intéressante, notamment avec l’amélioration de leurs performances tant en vitesse qu’en capacité logique. Ce type de circuits est d’ailleurs disponible maintenant sous forme de "cœur" utilisable pour la conception de systèmes sur puces (SOC). Compte tenu de l’expérience acquise, d’une part sur le test et le test intégré des pannes de délai et, d’autre part, sur le test des circuits programmables, nous avons entrepris en 2001 une étude portant sur le test des pannes temporelles dans les circuits programmables. L’objectif de cette étude est de proposer des méthodes et outils adaptés aux structures spécifiques de ce type de circuits permettant de tester les pannes temporelles pouvant affecter une implantation. Cet aspect du projet « test de pannes temporelles », démarré en 2001, a essentiellement fait l’objet d’une étude bibliographique sur :
• les spécificités des structures programmables de type FPGA et PLD,
• les travaux déjà réalisés en test de délai sur ce type de structures. La suite de cette étude comportera notamment les points suivants :
• une étude sur l'extraction d'un modèle de circuit implanté sur une structure programmable,
• la mise au point d'un modèle de pannes de délai adapté à ce type de structures,
• l'analyse de la problématique particulière à ces structures pour la génération intégrée de vecteurs de test (BIST).
Enfin, les points suivants ont été abordés concernant l’axe « test intégré de pannes temporelles dans les mémoires ». Cette étude a pour objectif de définir des algorithmes embarqués permettant le test autonome de mémoires (memory BIST) en vue d'une meilleure détection de défauts et notamment de défauts se traduisant par un dysfonctionnement temporel. Les mémoires représentent actuellement une part prépondérante dans la composition des systèmes sur puce. Il est en effet commun d'avoir à considérer des systèmes où les éléments mémoires représentent plus de la moitié du dispositif. D’autre part, l'optimisation des systèmes en termes de surface, de puissance consommée et de temps d'accès implique de concevoir les mémoires en utilisant les limites de la technologie. En conséquence, ces dispositifs deviennent plus sensibles aux pannes et les rendements diminuent. Il est en effet reconnu que les mémoires concentrent la plupart des défauts dans un SOC et qu'ils sont donc l'un des facteurs principaux de baisse du rendement. Les solutions de BIST utilisées actuellement pour tester les mémoires sont trop génériques et ne sont pas conformes aux conditions requises pour tester les vrais défauts intimement liés à l'architecture et au procédé de fabrication de la mémoire. Par exemple, les BIST utilisés aujourd'hui se limitent souvent à vérifier des modèles de défauts très simples (comme le collage-à-un, collage-à-zéro, l'interdépendance entre les cellules de mémoire adjacentes), mais ne peuvent pas traiter les défauts relatifs aux réels délais de propagation. De plus, l'opération de test n'est pas exécutée dans les vraies conditions de fonctionnement du dispositif (souvent à une fréquence inférieure à celle de la mémoire utilisée dans l'application), certains problèmes non détectés lors de ce test à basse fréquence peuvent donc échapper à la procédure de test.
115

Par conséquent, il est indispensable de développer des solutions originales et novatrices permettant de valider les mémoires à l'aide de modèles de défauts plus réalistes et notamment de modèles de défauts temporels. Cette étude est menée en collaboration avec la société Infineon dans le cadre du contrat Medea+ « Associate ». En 2001, nous avons principalement travaillé sur la mise en place du cahier des charges et l’étude de la problématique. Par la suite, nous nous concentrerons sur les aspects suivants :
• BIST fonctionnant à la vitesse réelle (en opération normale) de la mémoire,
• BIST basé sur de nouveaux modèles plus réalistes des défauts (permettant de prendre en compte les problèmes liés aux véritables délais de propagation des cellules mémoires),
• étude de la possibilité d’utiliser une méthodologie de BIST commune pour les parties de mémoire et de logique des systèmes sur puces.
Test de circuit reconfigurable
Travaux de : M. Renovell, J.M. Portal, P. Faure (10/99-10/02) Collaborations : Pr Joan Figueras (Université Polytechnique de Catalogne, Barcelone, Espagne), Dr Yervant Zorian (LogicVision, San Jose, USA) Les circuits flexibles reconfigurables constituent une solution technologique intéressante et sont de plus en plus utilisés par les concepteurs au fur et à mesure de l’amélioration de leurs performances tant en vitesse qu’en capacité logique. Ces circuits sont d’ailleurs présents maintenant sous forme de "cœurs" utilisables dans une conception basée sur l’intégration de cœurs. De ce fait, le test de ces circuits en sortie de fonderie aussi bien qu’en entrée avant utilisation fait l’objet d’études spécifiques.
Le test des FPGAs en sortie de fonderie a fait l’objet de travaux dans la période s’étendant de 1996 à 2000. Le travail s’est ensuite axé principalement vers les problématiques de test utilisateurs dans la période s’étendant de 1999 à 2001. Compte tenu de la complexité des circuits reconfigurables à base de cellules mémoires SRAM, le premier travail a consisté à décomposer ces circuits en plusieurs parties distinctes : les blocs logiques, les éléments d’interconnexions et les points mémoires de stockage de la configuration. Nous avons abordé dans un premier temps le problème du test des blocs logiques. Nous avons proposé une approche structurelle utilisant directement une description du FPGA, et non pas une description au niveau porte classique, pour générer les vecteurs de test. Ceci permet de tester l’intégralité des dispositifs et, par conséquent, d’aboutir à des taux de couverture très élevés au détriment du temps de calcul requis pour générer ces vecteurs de test.
Configuration de test du FPGA
Pour minimiser le temps de calcul des vecteurs de test, nous avons ensuite proposé différentes modifications de la description du FPGA. Ces modifications apportées avant la génération des vecteurs permettent de réduire considérablement le temps de calcul. Cette approche est en cours d’évaluation avec des circuits largement répandus tels que les XILINX 3000, 4000, ALTERA.
116

Test intégré de circuit mixte
Travaux de : F. Azaïs, Y. Bertrand, M. Renovell Collaboration : Pr. L. Carro, E. Cota et Pr. M. Lubaszewski (UFRGS, Porto-Alegre, Brésil)
Ce projet concerne la mise en œuvre de test intégré (BIST) pour les circuits analogiques. L'idée fondamentale consiste à diminuer la tâche des équipements de test, et par conséquent réduire les coûts associés au test d'un circuit, en transférant certaines des ressources de test sur le silicium.
Dans un premier temps, nos efforts se sont portés sur le problème de l'analyse de réponses de test, et un module original permettant de générer une signature caractéristique soit de la réponse temporelle du circuit, soit de la réponse en fréquence, a été développé. L'idée fondamentale consiste à utiliser la fonction intégration pour obtenir une signature d'un signal analogique. La structure développée est ainsi basée sur un montage intégrateur classique avec insertion de transistors MOS pour le contrôle du mode test.
Dans un deuxième temps, nos travaux ont porté sur le problème de la génération de stimuli de test et un module permettant de générer de manière interne des créneaux, des rampes ou bien des signaux sinusoïdaux, a été développé. Il s'agit là aussi d'un module basé sur un montage intégrateur, et permettant l'application de signaux de test analogiques à la fois en mode temporel et fréquentiel.
Finalement, ces travaux préliminaires nous ont conduit à définir une stratégie de test intégré pour filtres analogiques. A partir de l'utilisation des modules de génération de stimuli de test et d'analyse de réponses précédemment définis, une solution d'implantation optimisée a été proposée, basée sur la réutilisation des blocs préexistants du filtre. Nous nous sommes alors attachés à étudier la dépendance vis à vis de la température de la structure BIST proposée. Une solution originale a alors été développée afin de rendre la structure BIST insensible aux variations de température.
Notons que ces travaux ont été menés pour partie dans le cadre d’un projet de collaboration scientifique avec l’Université Fédérale de Rio Grande do Sul (UFRGS), Porto Alegre.
Test intégré de convertisseur analogique-numérique
Travaux de : F. Azaïs, Y. Bertrand, M. Renovell, S. Bernard (10/98-10/01), M. Comte (09/00-09/03) Les travaux menés dans ce projet ont pour objet l'intégration de la technique de test par histogramme qui permet de mesurer les caractéristiques fonctionnelles d'un convertisseur telles que la tension de décalage, le gain et les non-linéarités. De manière classique, ce type de test en externe nécessite des ressources matérielles importantes, rendant l'intégration directe de la technique inacceptable en terme de surface. Nous avons donc été amené à redéfinir l'algorithme du test par histogramme pour diminuer les ressources nécessaires à son fonctionnement tout en préservant ses performances. L'idée fondamentale consiste à décomposer dans le temps l'accumulation et l'exploitation de l'histogramme. Notre solution repose ainsi sur l'accumulation code à code de l'histogramme et sur un traitement séquentiel des informations relatives à chaque code. A un instant donné du traitement séquentiel, les ressources matérielles requises ne concernent que le code en cours. Après traitement d'un code, ces ressources sont alors libérées et rendues disponibles pour le code suivant. Cette approche nous a permis de définir l'architecture haut niveau d'un module de test intégré de surface réduite, architecture qui a fait l'objet d'un dépôt de brevet par le CNRS.
Evaluation des non-linéarités
117
L'implantation physique de ce module dans le cas d'un histogramme linéaire a été réalisée et les résultats des tests appliqués au circuit dès son retour de fonderie sont en parfaite adéquation avec les résultats de simulation. En parallèle, nous avons aussi travaillé sur l'implantation du test par histogramme sinusoïdal en développant des solutions originales pour simplifier les calculs d'extraction des paramètres et réduire la mémoire nécessaire au stockage de l'histogramme de référence. Ces solutions ont été validées à l'aide d'un programme d'évaluation développé en LABVIEW permettant de comparer les résultats obtenus avec notre technique à ceux obtenus avec la technique originale de test par histogramme. Finalement, le problème de la génération intégrée des stimuli de test nécessaires à l'application du test par histogramme a aussi été abordé. Un générateur auto-calibré de signaux triangulaires analogiques présentant une surface réduite a ainsi été développé. L'originalité de ce module consiste à utiliser une phase préliminaire d'auto-calibration afin de s’affranchir de la sensibilité vis à vis des fluctuations technologiques, permettant alors la génération de signaux analogiques extrêmement précis. Ces travaux ont fait l'objet de la thèse de S. Bernard soutenue en avril 2001, et sont actuellement poursuivis par M. Comte dont la soutenance est prévue en 2003.
Méthodologie de test pour les PLL
Travaux de : F. Azaïs, Y. Bertrand et M. Renovell Collaboration : Pr. André Ivanov (University of British Columbia, Vancouver, Canada) Les travaux menés dans ce projet s'intéressent au problème de la réduction des coûts de test pour les PLL ("Phase Locked Loop"). L'idée consiste à définir des structures de Conception en Vue du Test (CVT) permettant de développer des méthodologies de test numérique de façon à éviter l'utilisation très coûteuse d'un équipement de test mixte analogique/numérique. Dans un premier temps, une structure de CVT a été proposée pour la partie analogique d'une PLL, à savoir le VCO ("Voltage Control Oscillator"). L'idée originale consiste à définir un VCO re-configurable réalisant sa fonction nominale en mode fonctionnel, et opérant comme une simple chaîne d'inverseurs en mode test. L'implantation de ce VCO re-configurable ne nécessite que deux interrupteurs, présentant un très faible impact sur la surface de silicium et sur les performances du circuit. L'utilisation du VCO en mode test permet par contre l'application d'une méthodologie de test sur un testeur numérique standard, évitant ainsi l'utilisation d'un équipement de test mixte hautes performances. Dans un deuxième temps, l'étude s'est poursuivie afin d'étendre la technique au test complet d'une PLL. En utilisant l'approche "diviser pour régner", une première solution a d'abord été définie permettant de réaliser le test individuel des différents blocs fonctionnels, à savoir le VCO, le détecteur de phase et la cellule de filtrage. Cette solution a ensuite évolué afin de proposer une stratégie de test unifiée. Cette nouvelle stratégie permet de tester les différents blocs fonctionnels dans une même phase, et est applicable avec un équipement de test numérique standard. Notons que ces travaux ont été menés dans le cadre d’un projet de collaboration scientifique avec l’Université de British Columbia (UBC), Vancouver.
Test des circuits à mémoire de courant
Travaux de : F. Azaïs, Y. Bertrand, M. Renovell, J-C. Bodin (10/96-11/99) Les travaux menés dans ce projet s'intéressent au problème du test des circuits à mémoire de courant. Ces circuits constituent une alternative intéressante aux circuits à capacités commutés, de part leur plus grande rapidité et leur facilité d'intégration dans des technologies standard. Cependant,
118
la structure de ces circuits étant très différente des structures analogiques classiques, il est nécessaire de développer des techniques de test spécifiques à ce type de circuit. Dans un premier temps, les travaux réalisés ont porté sur l'étude de l'efficacité d'un test DC pour une cellule à mémoire de courant. Il a ainsi été démontré que la plupart des fautes catastrophiques peuvent être détectées en appliquant un seul courant négatif dans le cas d'une cellule élémentaire et en appliquant deux courants de sens opposés dans le cas de la cellule plus sophistiquée S2I. Dans un deuxième temps, notre effort a porté sur le développement d'une technique de Conception en Vue du Test (CVT) dédiée aux circuits à mémoire de courant. Nous avons ainsi proposé une technique qui permet de ramener le problème du test global d'un bloc fonctionnel au test individuel d'une cellule. Cette technique est très facilement automatisable et présente l'avantage de ne pas modifier les performances nominales du circuit. En effet, la structure du bloc analogique à mémoire de courant est complètement préservée et seul le schéma d'horloge est modifié. Cette modification permet de réaliser un dépliage virtuel du circuit qui se ramène ainsi à une cascade de cellules mémoire. Cette technique de CVT a, par la suite, été adaptée en vue d'une intégration complète du test sur le silicium, et une solution BIST a été proposée. Parallèlement, une autre voie basée sur une approche de test structurelle a été prospectée. Il s'agit cette fois d'utiliser la cellule mémoire non plus dans son mode fonctionnel classique, mais de définir un nouveau mode de fonctionnement dédié au test. En jouant sur le schéma d'horloge, nous avons ainsi défini un nouveau mode de fonctionnement en 2 phases (isolation et transparence) qui permet de tester simultanément les différentes cellules mémoire d'un bloc fonctionnel. Cette technique présente donc l'avantage d'être particulièrement rapide tout en préservant les performances nominales du circuit. De plus, nous avons mis en évidence que cette nouvelle technique structurelle est complémentaire d'un test fonctionnel, permettant ainsi d'atteindre une meilleur couverture de fautes en utilisant une stratégie de test mixte. Ces différents travaux ont constitué la thèse de J-C. Bodin soutenue en octobre 99.
Test intégré de circuit séquentiel
Travaux de : M.L. Flottes, C. Landrault, A. Petitqueux (10/97-10/00) Si au niveau du test intégré des circuits combinatoires, on peut considérer que des solutions bien qu’imparfaites mais tout de même réalistes existent (les outils actuels présents sur le marché proposent des solutions à ce problème), il n’en est pas de même pour les circuits séquentiels. En effet, certains travaux préliminaires ont été réalisés et publiés ces dernières années, mais il faut tout de même préciser que pour la plupart, ils ne prennent pas en compte des hypothèses réalistes permettant de les voir être intégrés rapidement dans des outils industriels. Nous avons donc décidé d’aborder ce problème en prenant en compte des contraintes de réalisation telles que l’initialisation, la surface effective, le taux de couverture et les performances de la machine résultante. Ces travaux, initialisés à la fin de l’année 1997, ont fait l’objet de la thèse d'A. Petitqueux soutenue le 24 octobre 2000. Dans ce cadre, nous avons proposé une méthodologie prenant en compte l’initialisation partielle des bascules de la machine séquentielle afin d’atteindre “plus souvent” les états internes de la machine “peu ou pas assez fréquentés“ en fonctionnement normal. Les résultats obtenus font apparaître des taux d'efficacité excellents très voisins de l‘optimum de 100% avec des augmentations de surface raisonnables qui n'excèdent pas 10%. Ces premiers travaux ont donné lieu à une présentation à l’European Test Workshop en 1999. Nous avons ensuite proposé une méthodologie d’initialisation partielle de bascules pour les circuits séquentiels digitaux. Notre but était d'accroître ainsi la testabilité de tels composants sans avoir à recourir aux techniques classiques de scan qui se révèlent efficaces mais coûteuses. Notre méthodologie a été validée sur un large banc d'essai. Elle a montré son efficacité à rendre les circuits plus facilement testables lorsqu'ils sont soumis à des séquences de vecteurs pseudo-aléatoires comme cela est souvent le cas en test intégré. Nous l'avons complétée par une technique d'insertion de points d'observation. Les validations expérimentales ont montré que l'on pouvait garantir un taux de couverture optimum de 100%.
119

Enfin une extension de cette méthode a été proposée dans le cadre d'un test externe déterministe. La technique d'initialisation sert dans ce cas à faciliter la procédure de recherche des vecteurs de test (ATPG). Les résultats montrent qu'après modification du circuit séquentiel comme préconisé, on atteint systématiquement une testabilité optimale (100% de taux de couverture et d'efficacité). Cette méthode s'avère moins coûteuse en terme de bascule modifiée que les méthodes classiques de scan. D'autre part, l'absence de scan permet de tester les circuits à leur vitesse nominale de fonctionnement, et d'accélérer la phase de test proprement dite puisque les vecteurs de test n'ont plus à être sérialisés. Ces travaux ont été présenté à l’Asian Test Symposium 2000.
Test intégré de circuit pipeline
Travaux de : M.L. Flottes, P. Girard, C. Landrault, I. Vogel (01/00-01/03) Collaboration : Intel, Californie, US. Le but de cette étude est de proposer une technique d'initialisation de circuits séquentiels pipeline utilisable dans le cadre d'un test intégré (BIST). Cette initialisation a pour but de fixer l'état du circuit avant application de la séquence de test. Comme cela est généralement le cas dans ce domaine, les contraintes portent sur le coût d'une telle technique. La technique de scan complet est une solution au problème d'initialisation. Elle consiste à connecter tous les éléments de mémorisation du circuit de façon à former un registre à décalage (chaîne de scan) dont l'entrée série est accessible depuis une entrée primaire. Malheureusement, le scan complet est très coûteux puisqu'il induit la modification de tous les éléments de mémorisation et donc engendre une surface additionnelle importante et dégrade les performances du composant. De plus, la procédure d'initialisation en scan complet peut être assez longue puisqu'elle demande autant de cycles d'horloge que d'éléments dans la chaîne de scan. Dans le cas d'un "Reset" complet, autre technique d'initialisation, tous les éléments de mémorisation sont "remis à zéro" à l'aide d'un signal commun distribué à travers le circuit. Les modifications apportées aux éléments mémoire sont moins coûteuses que celles induites par la technique de scan mais reste néanmoins importantes. L'avantage ici est que le circuit est initialisé en un seul cycle d'horloge. Une solution intermédiaire consisterait à ne modifier que certains éléments mémoire (techniques de Scan Partiel ou de Reset Partiel). Dans ce cas, il faut être capable de désigner quel est l'ensemble minimum d'éléments à modifier et quelle est la procédure d'initialisation à suivre pour garantir l'état initial du circuit. Afin, d’une part de pouvoir évaluer l'efficacité de nouvelles techniques d'initialisation et, d'autre part, de dégager des règles d'initialisation basées sur une technique de reset partiel nous avons tout d’abord défini un circuit pipeline. Ce circuit, un multiplieur pipeline, a été synthétisé et simulé ; il comporte des cycles qui sont à l'origine des problèmes d'initialisation dans les circuits séquentiels. L'étude de cet exemple a permis de dégager certains critères de choix quant aux éléments de mémorisation qui devaient être modifiés. La généralisation de ces critères nous a permis de proposer un algorithme dérivé d’un algorithme d’ouverture de cycles. Cet algorithme a été codé et validé sur des circuits test. L’étape suivante de notre travail consiste à appliquer cette technique sur des circuits industriels fournis par notre partenaire. Ce travail fait l'objet de la thèse de I. Vogel. Il est financé par la société Intel (Intel Corp., Santa Clara, California, USA) dans le cadre d'un contrat d'une durée de trois ans.
120
Test et optimisation faible puissance
Travaux de : P. Girard, C. Landrault, S. Pravossoudovitch, D. Severac (10/95-11/98), L. Guiller (10/97-11/00), Y. Bonhomme (10/00-10/03) Collaborations : P.r J. Figueras (Université Polytechnique de Barcelone, Espagne), Pr. P. Teixeira (Université de Lisbonne, Portugal), Pr. H.J. Wunderlich (Université de Stuttgart, Allemagne) Ce projet porte sur la prise en compte des problèmes de consommation de puissance et/ou d'énergie pendant la phase de test logique des circuits intégrés. Le but est de développer des méthodes et outils permettant de réduire l’activité totale du circuit en mode test, puisque celle-ci s’avère être largement supérieure à l’activité générée lors du fonctionnement normal, et peut donc entraîner une dégradation totale ou partielle du circuit testé. Les travaux réalisés au cours des quatre dernières années dans le cadre de ce projet peuvent être scindés en deux parties : les travaux qui ont porté sur la prise en compte de ces problèmes de consommation lors du test intégré (BIST) des circuits numériques, et les travaux qui ont porté sur la prise en compte de ces problèmes lors du test externe (test réalisé uniquement à l’aide d’un testeur ou ATE) de ces mêmes circuits. En ce qui concerne le test intégré, notre étude a d'abord consisté à jouer sur les paramètres du générateur de vecteurs de test pour minimiser l’énergie consommée tout en assurant un taux de couverture élevé. Par la suite, plusieurs approches ont été développées (filtrage de vecteurs de test non détectants, partitionnement du circuit sous test, production de vecteurs de test par générateur adjacent, …), qui ont permis d'apporter des résultats significatifs en termes de réduction de puissance dissipées lors du test. Ces travaux ont fait l'objet de nombreuses présentations dans des conférences internationales, et ont été menés dans le cadre de deux collaborations scientifiques, l’une avec l’Université Polytechnique de Barcelone et l’Université de Lisbonne, l’autre avec l'Université de Stuttgart. La thèse de L. Guiller, soutenue le 6 novembre 2000, résume l’ensemble de ces travaux. En ce qui concerne le test externe, l’étude a porté tout d’abord sur le ré-ordonnancement des vecteurs en vue d’une réduction du nombre de commutations produites par la séquence de test (thèse de D. Séverac, soutenue le 12 novembre 1998). Les autres travaux ont porté sur le partitionnement d’une chaîne de scan en 2 ou plusieurs sous-chaînes travaillant en alternance lors du chargement (déchargement) de chaque vecteur (réponse), permettant ainsi de réduire de moitié la puissance consommée par le circuit lors du test. Les derniers travaux (en cours) dans ce contexte portent sur le ré-ordonnancement des bascules de chaque chaîne de scan constituant le circuit. La thèse de Y. Bonhomme, initiée en octobre 2000, fait l’objet de ces travaux. Enfin, il est à noter que ces travaux sur le test faible consommation se poursuivront dans le cadre d’un contrat européen (projet A503 ASSOCIATE) qui a débuté en juillet 2001 et se poursuivra jusqu’en 2004.
Test intégré et apprentissage
Travaux de : P. Girard, C. Landrault. Collaborations : G. Caraux, O. Gascuel, L. Bréhelin (01/98-06/01), C. Fagot (10/96-01/00) (Département Informatique Fondamentale et Applications, LIRMM) Dans le domaine de l’informatique, « l’Apprentissage » permet d’extraire automatiquement de l’information à partir d’exemples. Cette discipline s’est d’abord développée dans le domaine de la statistique, et bénéficie depuis la fin des années 70 de l’apport de techniques d’Intelligence Artificielle (IA). Dans ce contexte, le but du projet « Test intégré et apprentissage » a été initialement de montrer l’efficacité de certaines techniques d’apprentissage pour générer des vecteurs de test pour les circuits logiques. L'apprentissage par similitude a d'abord été étudié jusqu’en 1997 dans le cadre de la thèse de C. Fagot. Par la suite, l'utilisation de modèles de Markov cachés lors de la construction, par
121

apprentissage, d'un générateur de séquences de test pour circuits séquentiels a permis d'obtenir d'excellents résultats, qui ont été présentés lors du congrès international « VLSI Test Symposium » en avril 2000. Ces travaux ont été réalisés dans le cadre de la thèse de L. Bréhelin, soutenue le 11 juin 2001. Parallèlement à ces travaux sur l'utilisation de techniques d'apprentissage, le problème du test intégré a également été abordé du point de vue de la compression prédictive avec perte de données (deuxième partie de la thèse de C. Fagot). Tenant compte des contraintes liées au test intégré (taux de couverture de fautes, temps de test, et surface occupée par le générateur), nous avons proposé une méthode qui permet d'initialiser un générateur de vecteurs afin que la séquence produite permette fasse apparaître le moins d'erreurs possible par rapport à un ensemble de vecteurs donnés. Ensuite, nous avons mis au point une structure de correction des vecteurs produits par ce générateur. Cette structure est un ensemble de masques utilisés de manière cyclique pour modifier les valeurs des bits de ces vecteurs. Ces travaux ont fait l'objet de plusieurs présentations dans des congrès internationaux, et ont été finalisés avec la soutenance de thèse de C. Fagot, le 24 janvier 2000. Notons enfin que l’ensemble de cette étude a fait appel à des compétences émanant à la fois du domaine de l’informatique fondamentale et du domaine de la microélectronique. Le travail a donc été réalisé en commun avec des chercheurs du département Informatique fondamentale du LIRMM. La finalité était de permettre, d’un coté, la validation d’outils et de techniques informatiques originales, et de l’autre, la mise au point de techniques de générations de vecteurs de test novatrices.
Synthèse et test
Travaux de : M-L Flottes, B. Rouzeyre, D. Berthelot (11/96-11/99), L. Volpe (10/96-10/99) Les travaux développés dans le cadre de ce projet ont pour but de minimiser le coût du test des circuits intégrés. Le principe des techniques mises en œuvre consiste à intégrer les contraintes de testabilité au plus tôt dans le processus de conception au même titre que les contraintes classiques de performance et de surface. Les circuits étudiés sont de type "chemin de données", leur contrôle étant assuré par une machine d'état aussi appelé contrôleur. Plusieurs solutions ont été envisagées selon le type de test ciblé. Tout d'abord, dans le cadre d'un test à l'aide d'un équipement externe où le "testeur" est connecté au circuit sous test via ses entrée/sorties : le circuit est conçu pour faciliter la propagation des données de test entre ses entrée/sorties et les différents éléments qui le constituent. Nous avons d'abord travaillé au développement d'algorithmes de synthèse d'architecture pour générer automatiquement des chemins de données assurant la propagation des données de test à moindre coût. Dans cette étude, le chemin de données était supposé parfaitement contrôlable grâce à l'insertion d'éléments de "scan" entre chemin de données et contrôleur. Nos travaux ont ensuite porté sur les modifications à apporter au contrôleur pour améliorer (voire rendre maximale) la testabilité du circuit complet sans avoir recours à des techniques de DFT classiques de type "scan" qui sont coûteuses tant en surface additionnelle qu'en temps de test. Nous avons alors développé une méthode originale basée sur le modèle d'automate fini permettant de définir et d'ajouter à moindre coût les instructions nécessaires à l'activation des chemins de test des éléments constituant le chemin de données. Ces travaux ont fait l'objet du stage de DEA de J.P. Rathenan et de la dernière partie de la thèse de L. Volpe. Le second axe concernait l'insertion automatisée du test intégré parallèle au sein du circuit. Nous avons tout d'abord développé une méthode agissant au niveau transfert de registres pour le test des interconnexions, registres, multiplexeurs, ... Cette méthode est complémentaire de nos travaux antérieurs et des méthodes publiées dans la littérature. L'ensemble des travaux portant sur l'insertion de contraintes de test durant la synthèse d'architecture tant pour un test externe que pour un test intégré fera l'objet d'un transfert vers l'industrie grâce à notre collaboration avec Temento dans le cadre du contrat Européen MEDEA+ ASSOCIATE. Nous avons développé un environnement complet agissant directement au niveau comportemental et articulé en deux méthodes : la première porte sur l'insertion du test à surface minimale tandis que l'autre concerne l'insertion du test à temps de test borné. Cet environnement permet au concepteur d'explorer un grand nombre de solutions inaccessibles par les méthodes classiques. Ces deux méthodes reposent sur le concept commun
122
d'écriture du test sous forme d'une description comportementale et permettent d'utiliser des outils de synthèse classiques. Ces travaux constituent la fin de la thèse de D. Berthelot et ont été développés dans le cadre d'un contrat avec le CNET.
Test Hiérarchique
Travaux de : M.L. Flottes, B. Rouzeyre
Les méthodes classiques de génération de vecteurs de test, basées sur la description au niveau portes logiques atteignent très rapidement leurs limites dès que la taille du circuit dépasse quelques milliers de portes et en particulier pour les circuits séquentiels. Nous avons développé une méthode de génération de vecteurs de test hiérarchique basée sur des informations issues à la fois du niveau RTL (interconnexions de blocs) et du niveau porte (description interne des blocs). Cette technique s’appuie sur nos travaux antérieurs portant sur l’analyse de testabilité effectuée à haut niveau. Cette méthode d’analyse permet de générer des chemins de test entre blocs. Les séquences d’activation de ces chemins (converties en vecteurs de test) servent de population initiale pour la méthode de génération de vecteurs de test hiérarchique. Si l’on distingue la partie contrôle et la partie données de ces vecteurs, la partie contrôle est issue des informations haut niveau (chemins de test) quant à la partie données, elle est issue d’une simulation au niveau porte. Cette méthode est basée sur l’utilisation d’un algorithme génétique. On évite ainsi de travailler uniquement au niveau porte et les résultats montrent que l’on améliore grandement les temps de génération pour des taux de couverture de fautes comparables.
Un autre aspect de cette étude s’est attaché à améliorer la testabilité des circuits traités. En se basant également sur l’analyse de testabilité citée ci-dessus, nous avons développé une technique de re-spécification des contrôleurs d’ASIC dont le but initial est d’obtenir la testabilité maximale sur la partie chemin de données. Les résultats montrent que ce but est non seulement atteint mais de plus que la testabilité du circuit complet est également améliorée.
Test des SOC : niveau système
Travaux de : M.L. Flottes, B. Rouzeyre, J. Pouget (10/99-10/02)
La tendance actuelle est de concevoir des systèmes complets à base de "cœurs" prédéfinis et peu ou pas modifiables. Ceci ne fait qu’ajouter à la complexité du processus de test du système complet (génération de vecteurs, accessibilité, contrôle du test de chacun des cœurs, puissance dissipée …).
Ce projet concerne la mise en œuvre du test au niveau système c’est-à-dire le test de chacun des cœurs et le test de leurs interconnections en incluant la glue logique aux interfaces. En ce qui concerne l’organisation du test des cœurs, aux deux extrêmes de l’espace des solutions se trouvent une solution totalement parallèle et une solution totalement série. La première solution consiste à activer toutes les ressources de test en même temps, elle n’est donc pas toujours envisageable pour des raisons de puissance dissipée et d'accessibilité. Quant à la seconde, qui consiste à activer le test de chacun des cœurs l’un après l’autre, elle induit des temps de test trop importants. Nous avons tout d'abord défini différents modes de contrôle au niveau système de façon à respecter à la fois les contraintes de puissance, d'accessibilité et de temps de test. Nous avons ensuite développé des méthodes d'ordonnancement pour ces différents modes de contrôle.
Nos travaux actuels portent sur la génération automatique d'une infrastructure de test compatible avec la norme IEEE P1500 permettant de rechercher le compromis optimal entre la surface additionnelle, le temps de test et la puissance dissipée.
123
Compression de données de test
Travaux de : M.L. Flottes, B. Rouzeyre, R. Poirier (10/01-10/04) La complexité actuelle des composants micro-électroniques, et notamment des systèmes sur puce (SOC), permet d'atteindre des performances encore jamais égalées. Malheureusement cette complexité grandissante augmente les problèmes liés au test de ces composants après fabrication. En effet, plus le composant contient de fonctions différentes, plus il est complexe en termes de nombre d'éléments intégrés et plus le nombre de vecteurs de test est important. Ce volume croissant de données de test rend difficile leur stockage et augmente de façon considérable le temps de test. Les travaux réalisés dans le cadre de ce projet ont pour but d'étudier et de développer de nouvelles méthodes de compression de façon à réduire le volume des données de test. Une étude bibliographique a été réalisée dans le cadre du stage de DEA de P. Benoit (2001). Nous nous proposons maintenant de développer de nouvelles techniques de compression afin de trouver le meilleur compromis possible entre le taux de compression atteint et la surface additionnelle de la circuiterie de décompression à intégrer sur silicium avec le circuit sous test. R Poirier a débuté en octobre 2001 son travail de thèse sur ce sujet en s'attachant plus particulièrement aux techniques de compression arithmétiques.
124

Micro-systèmes
Permanents : Y. Bertrand, C. Dufaza, L. Latorre, P. Nouet, M. Robert. Le terme de micro-système désigne en général les études de systèmes électroniques où les modules capteurs, mise en forme puis traitement du signal et actionneurs sont miniaturisés. L'importance et la qualité des relations nouées ces dernières années dans ce domaine sont pour nous une preuve de la pertinence des options de départ et nous encouragent à maintenir l'effort d'investissement nécessaire pour stabiliser ce nouveau thème. Actuellement, trois projets sont en cours :
• optimisation du rendement de conception des micro-systèmes,
• conception et test de micro-systèmes monolithiques,
• conception de micro-systèmes appliquée à la réalisation de micro-contacts radio-fréquences. Ces deux derniers projet sont menés en collaboration avec le CNES de Toulouse (Division AQ/EQE/AE) avec qui nous entretenons des relations privilégiées depuis de nombreuses années.
Optimisation du rendement de conception des micro-systèmes
Travaux de : C. Dufaza, F. Delauche (10/99-10/02) Collaboration : MEMSCAP, Grenoble. L'idée de « l’Optimisation du Rendement de Conception des Micro-systèmes » consiste à comprendre et à améliorer les choix de conception liés au rendement de fabrication des micro-systèmes. De même que pour les circuits intégrés, le rendement de fabrication des micro-systèmes peut se décomposer en deux parties : le rendement technologique et le rendement paramétrique. Le rendement technologique étant essentiellement lié à un procédé de fabrication, notre objectif est d’améliorer en premier lieu le rendement paramétrique des micro-systèmes. Quelle est l’image simplifiée du rendement paramétrique d’un micro-système ? Un micro-système, ou plus précisément sa partie sensible capteur et/ou actionneur, peut se modéliser dans un espace à plusieurs dimensions avec des paramètres mécaniques, chimiques, thermiques, optiques, électroniques, magnétiques, etc. On note donc, par rapport au cas des circuits intégrés qui se limitait essentiellement à des paramètres électriques, une plus grande complexité de la nature, du nombre et des relations entre paramètres physiques dans le cas des micro-systèmes. Lors de la conception de ces structures, il existe donc des choix de formes, de volumes, de dimensions, … de façon générale tous les paramètres de conception libres pour le concepteur, qui permettent de fournir plusieurs solutions au même cahier des charges initial. Cependant, parmi ces solutions, certaines sont moins sensibles aux variations des paramètres physiques qui découlent du procédé de fabrication des micro-systèmes. Les recherches concernant le « Centrage de la Conception » (Design Centering) visent à optimiser le rendement de fabrication des micro-systèmes en concevant des micro-systèmes dont la sensibilité aux variations des paramètres technologiques est minimale. Ce projet de recherche démarré dans le cadre d'une thèse CIFRE en novembre 1999 à l’aide d’un cofinancement MEMSCAP - ANRT, vise à définir un prototype logiciel permettant l’étude du centrage de la conception et donc de « l’Optimisation du Rendement de Conception des Micro-systèmes » qui pourrait compléter l’offre de services, et notamment l’offre logicielle, de la société MEMSCAP.
125

Conception et test de micro-systèmes monolithiques
Travaux de : Y. Bertrand, L. Latorre et P. Nouet V. Beroulle (10/99-10/02) En 1995 nous avons recherché des partenaires industriels qui partageaient notre idée initiale : « faire le meilleur microsystème à partir d’un capteur qui n'est pas forcément le meilleur »… Ainsi, en septembre 1996, la thèse de L. Latorre a débuté dans le cadre d'une bourse CNES, cofinancée par Schneider Electric qui nous a aussi fourni le domaine d'application de nos travaux : la mesure de champ magnétique. Après avoir soutenu sa thèse en 1999, L. Latorre a été recruté comme Maître de Conférences à l’ISIM. L’activité scientifique internationale en microsystème est grande et, dès le début, nous avons cherché à apparaître comme autre chose qu’un laboratoire de plus travaillant dans le domaine. C’est donc sur nos spécificités que nous nous appuyons pour aborder cette thématique : un microsystème monolithique étant avant tout un système sur une puce, il est nécessaire de définir des méthodologies de conception permettant notamment la simulation conjointe de dispositifs électro-mécaniques et électroniques (objet essentiel de la thèse de L. Latorre). Plus récemment, nous nous sommes intéressés au test de ces systèmes. En effet, nous connaissons depuis longtemps au laboratoire l’effet « pervers » de l’intégration monolithique qui rend de plus en plus difficile le test fonctionnel des systèmes. Ce travail fera l’objet de la soutenance de thèse de doctorat de Vincent Beroulle en 2002. L’originalité de ce projet réside dans l’équilibre que nous avons trouvé entre domaine d’application et recherche amont. Durant ces quatre années les concepts développés tant au niveau des méthodes de conception que des méthodes de test ont tous été validés et appliqués sur une application développée au laboratoire : un micro-capteur de champ magnétique. Cette originalité nous a valu une certaine reconnaissance comme en témoigne les éléments suivants :
• sur la période 1998-2001, cette activité a donné lieu à cinq articles dans des revues et à 14 présentations dans des conférences avec actes et comité de lecture ainsi que des conférences invitées ou de vulgarisation scientifique. En Janvier 2002, L. Latorre présentera nos travaux dans la plus grande conférence du domaine (MEMS qui présente un taux d’acceptation de l’ordre de 10%),
• sur la même période nous avons noué des relations contractuelles avec le CNES, Schneider Electric et plus récemment EADS L.V.
Nous avons aussi initié de nombreuses et fructueuses collaborations scientifiques internationales :
• avec le Pr. CJ Kim (UCLA) dans le cadre d'une collaboration entre le LIRMM, le CNES et le "Mechanical & Aerospace Engineering Department" de l'Université de Californie à Los Angeles sur l'étude des possibilités d'intégration monolithique de micro-interrupteurs à métaux liquides sur des substrats silicium issus d'une technologie circuit intégré,
• avec le Pr. Salvatore Baglio de l’Université de Catane qui nous a rendu visite dans le cadre d’une bourse de l’OTAN pour travailler sur les comportements parasites de nos structures,
• plus récemment avec l’équipe du Pr. Marcello Lubasweski de l’université de Porto Alegre dans le cadre d’un accord CAPES-COFECUB. Les sujets traités en commun concernent le test de microsystèmes et la réalisation d’accéléromètres sur une technologie permettant la gravure en volume du substrat.
2mm
Micro-capteur de champ magnétique
126
Conception de micro-système : micro-contact radio-fréquence
Travaux de : C. Dufaza, M. Robert, X. Lafontan (10/98-10/01) Collaboration : CNES, Division AQ/EQE/AE, Toulouse. Les nombreux développements de systèmes électromécaniques ou MEMS ont permis des avancées significatives dans les domaines des capteurs (accéléromètres, capteurs de pression, etc.), des micro-machines (pompes, moteurs miniatures, etc.) et des composants de contrôle (afficheurs TV haute définition, modulateurs de lumière spatiale, etc.). Les technologies d’usinage en surface et en volume permettent désormais la fabrication de structures en trois dimensions complexes avec une fiabilité et une reproductibilité propres à la fabrication des circuits intégrés. Les récents progrès de la technologie MEMS rendent désormais possible la conception et la fabrication de dispositifs de contrôle permettant la commutation de signaux radio-fréquences, très employés notamment en téléphonie cellulaire type GSM ou UMTS. Ce projet de recherche, démarré en octobre 1998 à l’aide d’un cofinancement CNES – CNRS dans le cadre d'une thèse BDI (Bourse de Docteur Ingénieur) s'est finalisé en novembre 2001 par la soutenance de thèse de X. Lafontan. Les travaux développés portaient notamment sur la conception et la caractérisation de micro-relais MEMS avec la technologie MUMPS du MCNC (USA). Du point de vue de la conception, deux principes ont été retenu : le contact latéral et le relais à charnière. Concernant la caractérisation, de nombreuses techniques d'analyse ont été mises en œuvre au CNES afin d'améliorer les performances et la fiabilité de ces composants.
127


Participation aux activités du CNFM
Participants : M. Robert, P. Amadou (STI), F. Azaïs, Y. Bertrand, G. Cathébras, G. Cambon, J.M. Dandonneau (STI), C. Dufaza, M.L. Flottes, P. Lépinay (STI), R. Lorival (STI), P. Nouet, J. Rebejac, G. Sagnes, L. Torres Le LIRMM est un des pilliers du pôle CNFM (Comité National de Formation en Microélectronique) de Montpellier. En plus de sa mission d’aide à la formation au niveau local (Ecole d'ingénieurs ISIM-MEA, Formation doctorale SYAM, maîtrise et licence EEA...), le pôle CNFM de Montpellier, assure deux responsabilités nationales : Centrale de Ressources en CAO du CNFM (CRCC, responsable C. Dufaza) : Elle assure l'interface entre les fournisseurs de logiciels de CAO microélectronique et les pôles CNFM. La CAML gère à l'heure actuelle un parc logiciel de 2000 licences d'utilisation dans plus de 50 sites des 11 pôles du CNFM. Cette offre concerne sept outils industriels : Cadence, MentorGraphics (Eldo-ADVanceMS), Silvaco, Altera (avec 300 cartes de protoypage), Xilinx, MEMScAP et Anadigm (avec 50 cartes de prototypage). Outre son rôle prospectif d'évaluation, de choix, de maintenance centralisée et de diffusion des logiciels, la CAML organise régulièrement des stages de formation aux outils de conception. Par exemple, l'année 2000 a permis la mise en place d'un plan de formation avec la société Cadence comprenant 3 stages de formation au plan national regroupant plus de 60 participants ainsi qu'une formation sur l'outil ADVance-MS de la société MentorGraphics. Centre de Ressources en Test du CNFM (CRTC, responsable Y. Bertrand) : En 1997, le CNFM a décidé de se doter d’un centre commun de formation : le Centre de Ressources de Test du CNFM dans le but de développer de façon significative l’enseignement du test industriel (caractérisation, production) des étudiants et élèves-ingénieurs et le développement de programmes de test pour les circuits d’application spécifique conçus dans le cadre des projets de recherche des laboratoires. Le LIRMM au travers de son département de microélectronique a été choisi par le CNFM comme site d’implantation pour ce centre.
Pour assurer l’accès à un test de composants performant, le CRTC, dispose depuis septembre 1997 d’un outil de test exceptionnel (le testeur HP83000-F330t), tant au niveau des performances techniques que de sa diffusion dans le monde des fabricants de circuits comme outil de caractérisation et de production. Chaque site éloigné accède au testeur localisé au LIRMM par le réseau dans la mesure où il dispose d’un serveur local. Cette implantation a été rendu possible par la mise en place d’un partenariat pluri-annuel entre le CRTC et Agilent Technologies (ex Hewlett Packard), des chercheurs et ITA du département de micro-électronique assurant des formations professionnelles aux ingénieurs de compagnies clientes de Agilent comme STMicroélectronics.
Le bilan pour 2000 montre un taux d’utilisation (cumulé en local et en déporté) de plus de 90% des jours ouvrables avec plus de 150 personnes formées dont 60 ingénieurs dans le cadre du partenariat avec Agilent.
129


Département ROBRobotique
Responsable : Etienne DombreAdjoint : Philippe Fraisse
Rapport d’activité du LIRMM 1998-2001

Personnels du département (au 31.12.01)
Enseignants-chercheurs
Andreu David Maître de Conférences Montpellier II Crestani Didier Maître de Conférences Montpellier II Crosnier André Maître de Conférences Montpellier II Fournier Alain Professeur Montpellier II Fraisse Philippe Maître de Conférences Montpellier II Jouvencel Bruno Maître de Conférences Montpellier II Liégeois Alain Professeur Montpellier II Poignet Philippe4 Maître de Conférences Montpellier II Prunet François Professeur Montpellier II Strauss Olivier Maître de Conférences Montpellier II Zapata René Maître de Conférences Montpellier II
Chercheurs CNRS
Aldon Marie-José Chargé de Recherche Dauchez Pierre5 Chargé de Recherche Dombre Etienne Directeur de Recherche Pierrot François Chargé de Recherche Vaganay Jérôme6 Chargé de Recherche
Chercheur INRIA
Guiraud David Chargé de Recherche
Post-doctorants
Comby Frédéric ATER depuis le 01.09.01 Company Olivier Ressources propres depuis le 01.09.00 Covès Christine ATER 01.09.00-31.08.01 Lavarec Erwann ATER 01.11.99-01.09.00 Lelevé Arnauld ATER 01.09.00-31.08.01 Louste Christophe ATER 01.09.99-31.08.00 Mateo Emmanuel Boursier Région LR 01.11.99-31.05.00 Rongier Philippe ATER 01.09.00-31.08.01
Thèses en cours Début
Agniel Cédric MESR octobre 2001 Albaric Jérôme MESR octobre 1999 Aragones Julien MESR octobre 1999 Bennour Meziane MESR octobre 2000 Borges Geovany Bourse CAPES (Brésil) septembre 1998 Carbou Jean-Damien MESR décembre 1999 Creuze Vincent BDI septembre 1999 4 depuis le 01/10/00 5 en détachement au MAE depuis le 01/09/00, Consulat de France, Houston TX (USA) 6 en disponibilité pour convenance personnelle depuis le 01/11/00
133

Druon Sébastien MESR octobre 2001 Duchemin Gilles BDI cof. SINTERS octobre 1999 Espinosa Ivan SFERE-CONACYT (Mexique) octobre 2001 Krut Sébastien Alloc. Couplée septembre 2000 Lucidarme Philippe MESR octobre 2000 Lydoire Fabien MESR octobre 2001 Marquet Frédéric MESR octobre 1999 Michelin Micaël Ressources propres octobre 2001 Ocampo Daniel COSNET-SFERE-SEP (Mex.) octobre 2001 Pessel Nathalie Bourse IFREMER octobre 2000 Puttipipatkajorn Amornrit Bourse Thaïlande octobre 2001 Rabaud Christophe MESR octobre 2001 Salgado-Jimenez Tomas SFERE-CONACYT (Mexique) octobre 2001 Sanchez Lopez Abraham PROMEP-SFERE (Mexique) octobre 2000 Telle Benoît MESR octobre 2000 Vivas Oscar Andrès Bourse Colombie octobre 2001
Thèses soutenues
1998 Financement Devenir Bonzom Pierre AMN Créateur d’entreprise (ELA Innovation) Caradec Muriel MESR Ingénieur IT-LINK SYSTEM Escleine Denis MESR Ingénieur ADEPT Technology Le Corre Yann MESR Ingénieur ALTRAN Perrier Clotilde DRET Ingénieur PEUGEOT Turchi Hervé MESR Ingénieur SYNOPSIS
1999 Barral David CIFRE Ingénieur SYNOPSIS Lapierre Lionel MESR Postdoc, ISR Lisbonne Mateo Emmanuel MESR Créateur d’entreprise (WANY) Louste Christophe Alloc. Couplée Maître de Conférences, Univ. Poitiers Montillet Denis CIFRE Créateur d’entreprise (WANY)
2000 Company Olivier AMN Contrat ADER Covès Christine MESR Ingénieur SYDELIS Lelevé Arnaud AMN Maître de Conférences INSA Lyon Rongier Philippe MESR -- Sistiaga Marc BDI cof. IFREMER Ingénieur CAP GEMINI
2001 Baccou Philippe MESR Ingénieur DATACEP (ALTRAN) Caby Christophe MESR Postdoc INRIA Sophia-Antipolis Comby Frédéric MESR ATER UM2 Lavarec Erwann MESR Créateur d’entreprise (WANY) Manh Anne-Gaëlle MESR CDD CEMAGREF
Chercheurs et enseignants-chercheurs ayant soutenu une HDR
Jouvencel Bruno 1998 Crosnier André 1999 Pierrot François 2001 Crestani Didier 2001
134
Introduction générale
Composition du département
En 2001, le département était composé de 15 chercheurs permanents (3 Professeurs, 8 Maîtres de Conférences, 1 DR CNRS, 2 CR CNRS, 1 CR INRIA). Dans la période 1998-2001, un Maître de Conférences et un CR1 INRIA en détachement ont été recrutés, deux chercheurs CNRS sont partis en détachement aux USA. Au 01/12/01, le département compte 2 Post-doc (1 ATER et 1 Post-doc sur ressources propres) et 23 thésards (11 allocataires Ministère, 2 BDI CNRS, 1 allocation couplée, 1 bourse IFREMER, 7 bourses de gouvernements étrangers, 1 bourse sur ressources propres). 21 thèses de Doctorat et 4 HDR ont été soutenues dans la période de référence. Le département est aussi responsable de l'option « Systèmes Automatiques » de la Formation doctorale SyAM (Systèmes Automatiques et Microélectroniques). A ce titre, il encadre dans ses locaux une quinzaine d'étudiants entre février et juillet, auxquels il faut ajouter une vingtaine de stagiaires d'origines diverses (DUT, étudiants de Maîtrise EEA, élèves ingénieurs, etc.) pour des durées variant de 2 à 6 mois. En période de pointe, le Département compte donc entre 60 et 70 personnes. Enfin, le Département bénéficie de l'assistance de deux ingénieurs, dont un à temps partiel (30%).
Activités de recherche
Les activités du département ROB ont pour objectif commun l'autonomie des systèmes complexes. Trois axes de recherche principaux se dégagent :
Synthèse de systèmes dynamiques complexes
• conception de robots (mécanique et architecture de commande) ;
• modélisation des systèmes (robots, appareil locomoteur, interactions homme / machine / environnement) ;
• identification des paramètres géométriques, dynamiques et physiques (contact, flexibilité) ;
• commande avancée (commande force / position, commande prédictive, commande référencée capteurs, systèmes à retard, etc.) ;
Navigation, perception et pilotage de véhicules autonomes
• perception et modélisation de l'environnement (mise en correspondance robuste : construction de mosaïques, stabilisation d’images, localisation, fusion de données, images et interaction) ;
• navigation locale (commande réflexe, évitement d’obstacles, commande référencée vision à partir de systèmes de vision d'inspiration biologique) ;
• coopération et coordination multi-robots (coordination de mouvements locomotion + manipulation, positionnement coopératif, navigation coordonnée, contrôle de l’émergence d’un comportement global désiré) ;
135
Gestion et supervision de systèmes complexes
• modélisation, analyse et optimisation des systèmes de production (modélisation d’entreprise) ;
• supervision et séquencement de modes de commande (systèmes dynamiques hybrides, distants, autonomes, réactifs tels que des électrodes distribuées pour la FES, des robots sous-marins, médicaux, etc.).
Ces trois axes sont complémentaires, et cette complémentarité se concrétise dans les applications traitées. Plusieurs domaines sont concernés : robotique parallèle et machines rapides, robotique médicale, locomotion artificielle, télé-applications, robotique sous-marine, robotique d’intervention et de service, réalité augmentée et réalité virtuelle, productique. Depuis 1998, des sites expérimentaux et démonstrateurs ont été développés et sont maintenant opérationnels : un robot PA-10 pour les études de faisabilité en robotique médicale, le robot SCALPP (prélèvement de peau en chirurgie réparatrice), Taipan (véhicule autonome sous-marin), H4 et ARCHI (robots parallèles pour l'usinage rapide), le robot OMNI (localisation de robots mobiles et commande de manipulateurs à roues).
Production scientifique
Les publications scientifiques principales durant la période de référence se répartissent de la façon suivante :
• 37 articles dans des revues internationales ou contributions à des ouvrages ;
• 113 présentations lors de colloques avec actes ;
• 13 présentations lors de colloques sans actes ;
• 4 habilitations à diriger des recherches ;
• 21 thèses de Doctorat.
Ressources et rayonnement scientifique
Sur les quatre dernières années, les ressources du département se répartissent comme suit : 11% de crédits récurrents, 11% de subventions régionales (équipements), 10% de crédits d'équipement CNRS, 22% de contrats d'Etat, 20% de contrats industriels et 26% de contrats européens). Les 2/3 de notre budget opérationnel sont donc d'origine contractuelle. On soulignera notamment :
• une importante implication régionale avec l'obtention de quatre soutiens SPRINTT : en robotique médicale avec la Société SINTERS ; en robotique sous-marine avec la Société HYTEC ; sur la modélisation des interactions pour la restitution d'œuvres (sculptures) avec la Société AP'ART ; sur la stabilisation d'images lors du contrôle de lignes haute tension avec la Société ECL ;
• une forte reconnaissance nationale, avec notamment :
o la participation à un projet du RNTS en robotique médicale ;
o la participation à 6 projets, (dont 1 pré-projet), du PIR du CNRS/STIC « Robotique et Entités Artificielles » (ROBEA, 2001). Le Département est responsable de 3 projets et du pré-projet ;
o la reconnaissance par le CNRS de deux "Jeune équipe" (Département SPI, 1999, 2000) et d'un projet JemSTIC (Département STIC, 2001) ;
• des relations suivies avec des grands groupes industriels (Dassault-Systèmes, Renault Automation / Comau, EADS), institutionnels (CEA, IFREMER, CEMAGREF, ONERA/DCSD, EDF) et avec des PME (SINTERS, MXM, WANY) ;
136

• des coopérations internationales au travers de :
o deux projets européens : BRITE-ROBOTOOL (machines-outils parallèles, 1998-2000), MACH21 (machines parallèles du 21ème siècle, 2000-2003) ;
o un réseau européen : EURON (European Robotics Research Network, depuis 2000) ;
o un projet international (Joint Project Research GOATS'2000, NATO, 2000) ;
o un programme d'échanges avec l'Institut Technologique de Toluca (Mexique, Programme ECOS, depuis 2000).
Coopération avec d'autres départements du LIRMM
Plusieurs projets communs ont émergé ces dernières années, concrétisant la volonté du département de s'ouvrir sur d'autres disciplines :
• projet JemSTIC du département STIC du CNRS (Robotique-IFA) autour de la problématique « Image et Interaction » (2001) ;
• deux actions financées par le département EEAI de l'Université Montpellier II : « Coopération et coordination de robots » (Robotique-ARC, 2000. Une thèse co-dirigée a été soutenue sur ce sujet en 2001) et « Electrodes distribuées pour l'électrostimulation fonctionnelle » (Robotique-Microélectronique, 2001) ;
• animation d'un « Groupe Vision » regroupant des membres des départements MIC et ARC du LIRMM, du CEM2 (Université Montpellier II) et du LGI2P (Ecole des Mines d'Alès) (2001) ;
• action « Jeune équipe » du département SPI du CNRS « Systèmes de vision intégrés biologiquement plausibles » (Robotique-Microélectronique, 1999) ;
• projet « Jeune Equipe » de l'Université Montpellier II « Commande de processus distants sur le réseau UMTS » (Robotique-ARC-Microélectronique,1999). ;
Quelques faits marquants
• deux « start-up » ont été créées par des anciens thésards du Département depuis 1998, dont la Société WANY « incubée » au LIRMM (1999-2001), deux fois lauréate du concours de création d'entreprise en 1999 et 2000 pour son projet de robotique ludique et gagnante du Prix européen IST en 2001 ;
• organisation de trois colloques : 2èmes Journées Nationales de la Recherche en Robotique (JNRR'99), Montpellier, 27-29 septembre 1999 ; Journées Nationales du Groupement de Recherche en Productique, Montpellier, 29-30 mars 2001, Journées Perception pour la robotique sous-marine, Montpellier, 8-9 novembre 2001 (sous l’égide de l’OT6.3 du GDR ISIS et du club EEA) ;
• négociation d'un projet commun INRIA-LIRMM hors site DEMAR (Déambulation et Mouvement Artificiel) « Analyse et synthèse du mouvement d'un membre paralysé sous stimulation électrique ». Recrutement en 2001 dans ce cadre d'un CR1 INRIA en détachement ;
• livraison de la Halle de Mécatronique jouxtant le LIRMM : installation en décembre 2001 de tous les démonstrateurs et plates-formes expérimentales dans une même salle de 200 m2.
137

Synthèse de systèmes dynamiques complexes
Travaux de : M.-J. Aldon, O. Company, A. Crosnier, P. Dauchez, E. Dombre, P. Fraisse, D. Guiraud, F. Pierrot, P. Poignet, C. Agniel, J. Aragones, C. Caby, S. Druon, G. Duchemin, I. Espinosa, S. Krut, F. Lydoire, F. Marquet, M. Michelin, A. Vivas
Introduction
Les travaux dans cet axe de recherche concernent le développement d'outils et de méthodologies pour la conception et la conduite des procédés afin de rendre les systèmes complexes plus performants et plus autonomes. Ces outils sont organisés autour de quatre thèmes :
Conception de systèmes complexes
Les objectifs sont de concevoir des systèmes dont les cinématiques et les dynamiques doivent permettre de réaliser des tâches dans des environnements coopératifs (homme / machine), interactifs (outils / matière, outils / tissus) et fortement contraints (par exemple l'intérieur du corps humain). Les spécifications en termes de précision, vitesse, efforts, rigidité, manipulabilité, absence ou éloignement de singularité dans l'espace de travail, réversibilité ou encore versatilité sont autant de critères qui devront être satisfaits pour optimiser la conception et répondre au cahier des charges exprimés par les utilisateurs finaux (usineurs, praticiens hospitaliers, etc.).
Modélisation
Trois aspects de modélisation sont abordés :
• la modélisation macroscopique, issue d'une modélisation microscopique fine, pour une meilleure connaissance et compréhension des phénomènes physiques mis en jeu. Cette étape est en général effectuée avec les spécialistes du domaine pour obtenir un modèle issu des équations de la physique. Après simplification, on extrait un modèle comportant les dynamiques essentielles des systèmes pour synthétiser des lois de commande qui amélioreront les performances et la robustesse. Cette modélisation concerne essentiellement la modélisation des interactions (contacts, frottements, impacts, etc.), la modélisation des flexibilités ;
• la modélisation et l'analyse de gestes et/ou de tâches pour concevoir des cinématiques nouvelles ;
• la modélisation des interactions avec détection de collision, analyse des déformations plastique ou élastique, étalonnage des modèles en relation avec des mesures (vision, effort) réalisées sur l’environnement, en vue de proposer des outils de planification de tâches dans des environnements réels ou virtuels ;
Identification
L'objectif est de développer des outils pour l'estimation en boucle fermée des paramètres physiques, d'une part des modèles géométriques (étalonnage) et, d'autre part, des modèles dynamiques d'interaction utilisés pour la commande. Les aspects importants en vue de l'identification d'un modèle sont : la nature du modèle (par exemple sa propriété ou non à s'exprimer linéairement par rapport à ses paramètres), la possibilité de définir et d'appliquer des trajectoires suffisamment riches de façon à assurer les conditions d'une excitation persistante, c'est-à-dire capable d'exciter les paramètres à
139
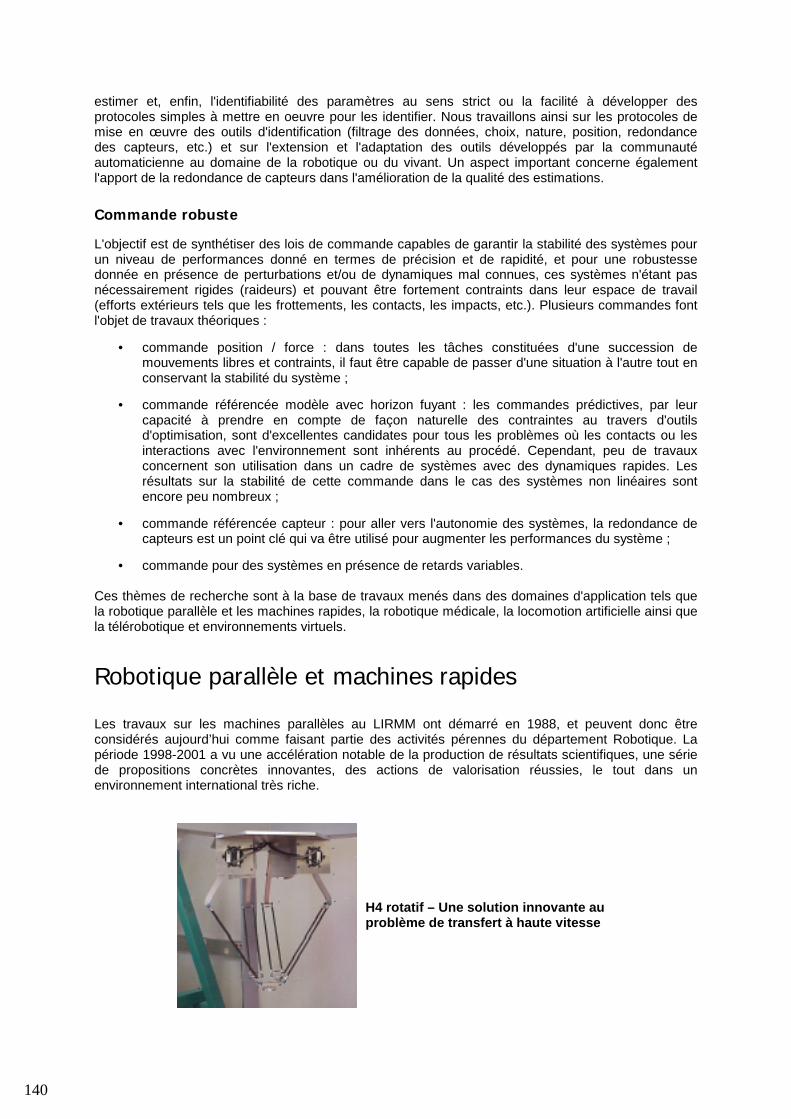
estimer et, enfin, l'identifiabilité des paramètres au sens strict ou la facilité à développer des protocoles simples à mettre en oeuvre pour les identifier. Nous travaillons ainsi sur les protocoles de mise en œuvre des outils d'identification (filtrage des données, choix, nature, position, redondance des capteurs, etc.) et sur l'extension et l'adaptation des outils développés par la communauté automaticienne au domaine de la robotique ou du vivant. Un aspect important concerne également l'apport de la redondance de capteurs dans l'amélioration de la qualité des estimations.
Commande robuste
L'objectif est de synthétiser des lois de commande capables de garantir la stabilité des systèmes pour un niveau de performances donné en termes de précision et de rapidité, et pour une robustesse donnée en présence de perturbations et/ou de dynamiques mal connues, ces systèmes n'étant pas nécessairement rigides (raideurs) et pouvant être fortement contraints dans leur espace de travail (efforts extérieurs tels que les frottements, les contacts, les impacts, etc.). Plusieurs commandes font l'objet de travaux théoriques :
• commande position / force : dans toutes les tâches constituées d'une succession de mouvements libres et contraints, il faut être capable de passer d'une situation à l'autre tout en conservant la stabilité du système ;
• commande référencée modèle avec horizon fuyant : les commandes prédictives, par leur capacité à prendre en compte de façon naturelle des contraintes au travers d'outils d'optimisation, sont d'excellentes candidates pour tous les problèmes où les contacts ou les interactions avec l'environnement sont inhérents au procédé. Cependant, peu de travaux concernent son utilisation dans un cadre de systèmes avec des dynamiques rapides. Les résultats sur la stabilité de cette commande dans le cas des systèmes non linéaires sont encore peu nombreux ;
• commande référencée capteur : pour aller vers l'autonomie des systèmes, la redondance de capteurs est un point clé qui va être utilisé pour augmenter les performances du système ;
• commande pour des systèmes en présence de retards variables. Ces thèmes de recherche sont à la base de travaux menés dans des domaines d'application tels que la robotique parallèle et les machines rapides, la robotique médicale, la locomotion artificielle ainsi que la télérobotique et environnements virtuels.
Robotique parallèle et machines rapides
Les travaux sur les machines parallèles au LIRMM ont démarré en 1988, et peuvent donc être considérés aujourd’hui comme faisant partie des activités pérennes du département Robotique. La période 1998-2001 a vu une accélération notable de la production de résultats scientifiques, une série de propositions concrètes innovantes, des actions de valorisation réussies, le tout dans un environnement international très riche.
H4 rotatif – Une solution innovante au problème de transfert à haute vitesse
140

Comme de coutume pour cet axe de recherche, les résultats scientifiques ont porté sur deux disciplines :
• le volet mécanique s’est enrichi (i) d’une nouvelle méthode de conception systématique, (ii) d’outils d’évaluation du volume de travail comprenant en particulier des preuves mathématiques solides à propos des singularités, (iii) d’une démarche de synthèse pour les machines 5 axes, et (iv) de la création d’une nouvelle famille de machines 4 axes (thèse de O. Company soutenue en 2000, thèse de S. Krut).
• le volet commande a été centré sur le thème de la redondance, et parmi tous les types de redondances possibles pour les machines parallèles, nous avons obtenu des résultats (i) sur la gestion de la redondance de mesure avec la preuve d’une amélioration probante de la précision de positionnement, et (ii) sur la gestion de la redondance d’actionnement où nous avons montré la possibilité de s’affranchir des singularités de type sur-mobilité (thèse de F. Marquet).
Les résultats scientifiques ont été systématique-ment validés par la construction de prototypes de laboratoire pour vérifier la pertinence de nos outils de conception-modélisation, et par des essais en grandeur réelle pour affirmer le bien fondé de nos approches de commande de systèmes redondants. Ces travaux ont été en partie menés dans le cadre de projets de recherche européens (Brite-Robotool, de 1997 à 1999, puis Growth-Mach21, depuis 2000).
Archi – Une machine à actionnement
redondant L’ensemble de ces travaux a été largement diffusé dans la communauté scientifique. Certaines avancées ont d’ores et déjà été transférées vers l’industrie pour servir de base à la conception de machines rapides (Renault-Automation), et vers le milieu scientifique (CEA) pour imaginer des positionneurs de haute précision pour la recherche nucléaire.
Positionneur du projet Mégajoule Urane Sx. Une machine à haute vitesse
réalisée par Renault-Automation grâce à nos outils de conception
Dans le futur, le thème de recherche Machines Parallèles a pour ambition de poursuivre :
• son développement en coopération avec des acteurs nationaux, notamment dans le cadre d’un projet ROBEA "Robots à architecture complexe" dont le LIRMM est responsable, mais également avec des partenaires internationaux, comme l’Université de Tohoku au Japon, ou l’Université d’Ann Arbor, dans le Michigan, pour aller vers la création de nouvelles architectures de machines ;
141
• ses activités pluri-disciplinaires mécanique-automatique, en mettant en œuvre une démarche allant de la conception vers la performance et l’autonomie, en mariant outils de conception mécanique, approches d’identification et méthodes de commande (thèse de A. Vivas).
Le thème sera aussi ouvert vers des domaines encore inexplorés, que ce soit à titre d’application (par exemple : la mesure en biomécanique en relation avec les travaux sur la locomotion artificielle), ou que ce soit pour approcher des échelles de travail nouvelles : vers les micro-machines en collaborant avec le département Microélectronique, et vers les méga-machines, en travaillant en collaboration avec l’industrie aéronautique (Projet européen AHEAD, 2002-2004).
Robotique médicale
Depuis 1994, le département Robotique s'intéresse aux applications de la robotique dans le domaine de la santé. Sur le plan scientifique, on s'intéresse à la conception, la modélisation et la commande de robots pour la réalisation assistée de gestes médico-chirurgicaux complexes :
• modélisation du geste : acquisition (relation effort-vitesse), analyse de la tâche et définition de la coopération robot/médecin (expérimentations sur animal avec un PA-10 au Laboratoire de Chirurgie Expérimentale de la Faculté de Médecine de Montpellier) ;
• conception et optimisation de la géométrie et de la cinématique selon des critères de dextérité, de manipulabilité, etc. ;
• commande : recherche de schémas adaptés au problème spécifique du contrôle des efforts au contact de surfaces déformables (interaction instrument/tissus) ;
• définition et validation de techniques d’apprentissage de tâches (sutures, nœuds, ligatures) et d’adaptation aux variations de l'environnement.
Projet HIPPOCRATE (1994-1998)
Le robot HIPPOCRATE (photo ci-après), conçu pour déplacer des sondes ultrasonores en médecine préventive cardio-vasculaire, a été installé à l'Hôpital Broussais fin 1998. En 1999, la mise en conformité du robot a été réalisée par SINTERS et notamment son marquage CE (dispositif médical de classe I). Le CCPPRB (Comité Consultatif de Protection des Personnes dans la Recherche Biomédicale) a donné son accord sur un protocole de recherche. Ainsi, un programme de validation clinique de deux ans a été lancé à l'automne 1999 pour évaluer l'apport de la robotique pour cette application (amélioration significative ou non de la qualité et de la reproductibilité des reconstructions 3D d'artères, des mesures de pression artérielle par tonométrie, etc.).
Projet SCALPP (1999-2002)
Le principe de suivi robotisé de surfaces souples développé pour HIPPOCRATE est exploitable pour d'autres applications nécessitant de connaître à chaque instant la localisation spatiale d'un instrument et de connaître ou réguler les efforts de contact de cet instrument avec une surface, qu'elle soit déformable ou non. Selon ce principe, le robot SCALPP (Système de Coupe Automatisé pour Le Prélèvement de Peau) contrôle l'action d'un dermatome, instrument utilisé pour prélever sur les patients des bandes de peau intactes, greffées ensuite sur les zones brûlées ou sur un moignon après amputation (financement Etat/Région Languedoc-Roussillon 1999-2001, collaboration avec le Service des Brûlés de l’Hôpital Lapeyronie à Montpellier). Dans ce contexte, la Société SINTERS a ouvert une antenne à Montpellier début 1999 afin de développer son activité en robotique médicale à proximité du LIRMM. Une thèse (G. Duchemin) a été lancée en octobre 1999 sur le sujet dans le cadre d'une BDI cofinancée CNRS-SINTERS. Sur nos spécifications, SINTERS a assuré la conception et la réalisation du robot, en intégrant notamment les exigences liées à une utilisation sécurisée et fiable en bloc opératoire. En 2001, nous avons terminé la mise au point du robot, ainsi que l’intégration du contrôle-commande haut niveau et de l'interface de programmation. Les premiers résultats sur tissus mous (mousse recouverte de
142

silicone) ont donné des résultats satisfaisants et confirment ceux obtenus lors de l'étude de faisabilité avec le PA-10. SCALPP a été présenté au SITEF à Toulouse en octobre 2000 (photo ci-dessous). Les premières validations cliniques sur animal sont prévues au printemps 2002.
Les robots HIPPOCRATE (à gauche) et SCALPP (à droite)
Projet ENDOXIROB (2000-2002)
Ce projet, monté dans le cadre de l’appel d’offre 2000 du Réseau National des Technologies de la Santé (RNTS), a été notifié en novembre 2000 par le Ministère de l’Economie, des Finances et de l’Industrie. Son objectif est la conception et le développement d’un robot téléopéré de chirurgie endoscopique qui devrait présenter des avancées importantes par rapport à l’existant (en termes d’encombrement, d'interface homme-machine, de dextérité, de miniaturisation des outils, de facilité de mise en œuvre, de coût, etc.). Les partenaires sont : SINTERS (Coordonateur), SIQUALIS, le CEA/CEREM, le LAAS, le LIRMM, l’IET Toulouse, l’INRIA, le CERT/DCSD et le CHU de Toulouse. Le LIRMM est impliqué dans la définition de la mesure des efforts, de l’algorithmique de contrôle-commande du système qui présente des caractéristiques géométriques, cinématiques et dynamiques particulières, ce qui pose des problèmes intéressants pour la commande en effort notamment. Par ailleurs, une étude de schémas de commande en vue de coordonner des mouvements sous contrainte de passage de l'avant bras par un point de pénétration a aussi été commencée. Il s'agit de montrer que l'on peut réaliser de la chirurgie endoscopique avec un robot non dédié et un contrôle actif du contact robot/trocart (thèse de M. Michelin).
Robot d’assistance pour la chirurgie dentaire en cabinet (2000)
Certains gestes de chirurgie buccale au fauteuil requièrent la présence d'un assistant pour réaliser des tâches qui, bien que peu valorisantes, réclament de l'attention, voire une anticipation des ordres du chirurgien. Il s'agit, par exemple pendant l'avulsion de dents de sagesse, de déplacer une canule pour aspirer l'eau projetée lors du fraisage et de manipuler un écarteur pour relever les lambeaux. D'autres gestes, tels que le forage de la mâchoire pour la pose d'implants, exigent une précision importante difficile à atteindre manuellement. L'étude d'un système de guidage approprié a été menée en 2000, conjointement avec SINTERS et le Service de Stomatologie et Chirurgie Maxillo-Faciale de l'Hôpital Rangueil à Toulouse, dans le cadre d'un Projet "Jeunes Equipes" du CNRS.
Conception d’un porteur générique (projet D2M2) (2001-2003)
Il s'agit de développer un robot qui sera utilisé pour réaliser des études de faisabilité dans le domaine médical. Partant du principe qu’un grand nombre de robots médicaux ne diffèrent fonctionnellement que par leurs organes terminaux, on pense que ces derniers pourraient être manipulés par un porteur générique. On souhaite donc développer un robot modulaire - D2M2 (Direct Drive Modular Manipulator) - composé de 4 degrés de liberté (incluant la première rotation du poignet) sur lequel différents poignets pourraient être facilement interfacés tant du point de vue mécanique et
143

électrotechnique que du point de vue contrôle-commande. L'étude de faisabilité d'une nouvelle application ne nécessiterait alors que le développement d'un poignet spécifique satisfaisant les contraintes particulières de cette dernière (thèse de I. Espinosa). Un financement a été accordé par le CNRS/SPI pour ce projet dans le cadre de la demande de crédits d’équipements 2000 du LIRMM.
Projet ROBEA (2001-2003)
Le projet ROBEA "Conception et commande de systèmes pour gestes dextres", dont le LIRMM est responsable, a été monté avec le LRP, le CEA/SRSI et l'hôpital Pitié Salpêtrière. Il s'inscrit de manière complémentaire au projet ENDOXIROB. La recherche concerne le développement de méthodes de conception et de commande de systèmes à hautes mobilité et dextérité pour la réalisation assistée de gestes complexes en chirurgie endoscopique et en microchirurgie. Au LIRMM, on s'attachera plus particulièrement à définir et à valider des techniques d’apprentissage de tâches (sutures, nœuds, ligatures) et d’adaptation aux variations de l'environnement grâce à un contrôle des efforts d’interaction instrument/tissus approprié. L'objectif est l'automatisation de certains gestes chirurgicaux répétitifs et l'amélioration de la coopération chirurgien/robot.
Locomotion artificielle (Projet DEMAR)
L'objectif général du projet est la conception de systèmes de restauration et le contrôle du mouvement de membres paralysés, fondés sur la stimulation électrique fonctionnelle (SEF). On s'intéressera dans un premier temps aux membres inférieurs chez le paraplégique pour la marche et la station debout. Ces travaux font suite à ceux menés depuis près de 30 ans, notamment dans la dernière décennie, dans le cadre des projets Européens CALIES (Computer Aided Locomotion by Implanted Electrical Stimulation) puis SUAW (Stand Up And Walk). Un stimulateur capable d'exciter soit les nerfs soit directement les muscles a été développé et implanté sur deux patients en 1999 et 2000. Le premier est capable de tenir debout plus d'une heure et de déambuler (en boucle ouverte) pendant près de deux heures. Grâce aux progrès de la microélectronique, on peut maintenant envisager une nouvelle génération de systèmes implantés (stimulateur, électrodes "intelligentes", capteurs). La précision du contrôle de la contraction musculaire qui en découlera permettra d'étudier des stratégies de commande en boucle fermée. C'est autour de cette problématique que le groupe de projet DEMAR (DEambulation et Mouvement Artificiel) s'est constitué sous la direction scientifique de D. Guiraud (CR1 INRIA en détachement au LIRMM). Ce groupe est composé pour l'instant de chercheurs de l'INRIA Rhône-Alpes (projet BIP) et de chercheurs des départements Robotique et Microélectronique, et pourrait devenir un projet INRIA hors-site au LIRMM. Le projet doit être présenté lors du prochain comité de programme INRIA en janvier 2002. Les thèmes de recherche centraux sont la modélisation et l'identification du muscle et du système musculo-squelettique mis en œuvre dans la marche, le développement d'un logiciel de synthèse et de simulation du mouvement, la définition de stratégies de contrôle de la marche et de supervision, la conception d'une interface patient "intelligente". Un effort important sera fait sur la partie expérimentale pour les mesures en vue de l'identification, ainsi que sur les implants (stimulateur et capteurs) grâce à une collaboration avec la société MXM (Antibes). Une thèse (F. Lydoire) a été lancée en 2001, qui conduira à émuler sur le robot BIP un actionnement musculaire et à valider des schémas de commande et des séquences de marche. Deux projets ROBEA, dont l'un est sous la responsabilité du LIRMM, sont en relation directe avec DEMAR : "Contrôle du mouvement du membre inférieur humain paralysé sous stimulation électrique" et "Commande pour la marche et la course d'un robot bipède".
144

Telérobotique et environnements virtuels
Préparation et exécution de missions
La réalisation de missions en mode téléopéré sur des sites industriels sensibles nécessite des moyens performants pour la préparation, la simulation et l’exécution de missions. Dans ce domaine nos travaux ont pour objectif principal le développement d’environnement de programmation de missions offrant à l’opérateur deux fonctions principales : l’entraînement et l’assistance dans l’exécution d’une mission donnée. L’approche proposée consiste dans la définition d’outils permettant la spécification complète de la tâche à réaliser : définition de la tâche orientée procédé, choix d’un système robotisé par rapport aux contraintes pour exécuter la tâche à réaliser et exécution de la tâche. Les travaux réalisés (thèse de C. Caby) ont eu pour objectifs, dans une première étape, le développement d’un module de programmation orienté procédé qui permet à un opérateur de spécifier la tâche à réaliser. Le principal apport scientifique concerne la définition de modèles d’interaction pouvant être utilisés pour la modélisation des actions de l’opérateur agissant à l’aide d’un outil sur l’environnement. Ces modèles s’appuient en particulier sur la détection de collisions et l’analyse fine des phénomènes de déformation. Dans une deuxième étape, il a été réalisé le couplage du module orienté procédé à un module orienté robotique dont la fonction est de permettre une simulation de la tâche : choix de la structure du robot, placement du robot, génération de mouvements sécurisés. L’ensemble des travaux a fait l’objet de plusieurs publications dans des conférences internationales et a conduit à la soutenance de la thèse de C. Caby (décembre 2001).
Génération de mouvements sécurisés
Images et Interaction
Le projet IMAGIN (IMAGes et INteraction), initié en 2000, s’appuie sur une démarche scientifique qui vise l’exploitation des informations issues de la mesure de l’environnement (vision, recalage couleur/3D) afin d’une part de reconstruire l’environnement (modèles géométriques et photométriques, caractéristiques, invariants), et d’autre part, d’exploiter au mieux la connaissance de l’environnement pour interagir avec celui-ci (modèles de déformation, synthèse de retour haptique). Cette approche a pour objectif la validation de modèles et d’outils permettant de traiter la problématique de la représentation des interactions Homme/Machine/Environnement en Robotique. Au cours de l’année 2001, plusieurs actions ont été mises en place afin développer cet axe de recherche :
145

• une nouvelle thèse (thèse de S. Druon, 2001-2004) sur le thème "Perception et interaction avec l’environnement pour la Réalité Augmentée. Application en Télérobotique" a été mise en place ;
• projet JemSTIC entre les Départements Robotique et IFA (C. Fiorio) sur le thème "Imagerie combinatoire pour la reconstruction et la mise à jour d'environnement pour des applications robotiques" (durée 24 mois) ;
• projet sur la modélisation des interactions et l’aide au geste dans le domaine de la sculpture. Plusieurs actions contractuelles sont en cours sur ce sujet avec la société APART : "Sculpture assistée par ordinateur" (projet SPRINT, Région Languedoc Roussillon) : "Réalisation d’un pantographe tridimensionnel à image virtuelle" (proposition de projet RNTL).
Commande de systèmes distants
La commande des systèmes distants est un thème au sein duquel sont étudiées tant des architectures que des lois de commande spécifiquement adaptées à un fonctionnement sur les réseaux. Ces travaux visent au développement d’applications distantes et distribuées utilisant les nouvelles technologies des réseaux sans fil haut-débit (tels que UMTS, Bluetooth, IEEE802.11b, Hyperlan…) et celles des composants mixtes (system-on-chip). Ils s’inscrivent notamment dans le cadre d’une collaboration scientifique entre des membres des Départements Robotique et Microélectronique et des membres des laboratoires ICARE (Toulouse le Mirail) et LIMOS (Clermont-Ferrand). L’étude de lois de commande incluant le réseau dans la boucle, centrée actuellement sur le schéma de commande Position/Force d'un bras manipulateur commandé à distance, porte sur l’estimation et la compensation des retards variables. Il s’agit d’analyser spécifiquement la stabilité afin d'assurer un certain niveau de robustesse vis-à-vis des perturbations radio et d’utilisation du canal. Ces travaux s’inscrivent dans la continuité de la thèse d'A. Leleve (soutenue en 2000). Les perspectives sont de réaliser une adaptation dynamique des niveaux de performance des lois de commande par rapport à la bande passante disponible sur le réseau (qualité de service) (thèse de C. Agniel). Dans ce cadre de la commande à distance de systèmes, il est essentiel de conférer au système distant une certaine autonomie notamment pour assurer la réactivité du système à l’occurrence d’événements imprévus (au sens temporel, tel la présence d’un obstacle). En effet, ne serait ce que pour des raisons de sécurité évidente, cette réactivité ne peut être soumise aux retards variables de la communication. Notre approche s’appuie sur une commande hybride (pilotage par commutation de commande) structurée autour de la notion de contexte d’exécution (voir également le paragraphe « Supervision des systèmes hybrides » dans le chapitre « Gestion et supervision des systèmes complexes »). Les travaux développés dans la thèse de J.-D. Carbou ont permis de conclure quant à la robustesse de la commande hybride proposée et à sa préservation de la stabilité ; obtenus uniquement en simulation, ils sont appliqués maintenant sur le robot réel. L'évolution du contrôleur embarqué, actuellement centré autour du mode de fonctionnement autonome, repose sur l’intégration de la coopération avec les modes téléopérés (gestion automatique de la rupture de communication, des événements imprévus lors d’une phase de téléopération, etc.). Enfin, le troisième volet de ce thème concerne l’architecture du système embarquée (voir également le paragraphe « Supervision des systèmes hybrides » dans le chapitre « Gestion et supervision des systèmes complexes »). Dans un souci de réactivité, de modularité et d’évolutivité, une architecture multi-réseaux est étudiée. Elle s’appuie sur deux réseaux ethernet, l’un accessible par liaison sans fil (pour la téléopération) et l’autre dédié aux échanges temps réel déterministes entre les entités de commande (nœuds de calcul tels des micro-contrôleurs, cartes PC embarquées,..) et l’instrumentation (capteurs et actionneurs). Nous avons pour cela défini un protocole application permettant de rendre ce réseau ethernet (dont la méthode d’accès est par essence "probabiliste") déterministe par arbitrage. Une architecture expérimentale est en construction avec pour perspectives, suite à son évaluation, de l’installer sur nos plates-formes expérimentales (robot mobile d’intervention et plate-forme de petits manipulateurs mobiles).
146
Navigation, perception et pilotage de véhicules autonomes
Travaux de : M.-J. Aldon, A. Fournier, B. Jouvencel, A. Liégeois, O. Strauss, J. Vaganay, R. Zapata, J. Albaric, P. Baccou, G. Borges, F. Comby, V. Creuze, E. Lavarec, P. Lucidarme, D. Ocampo, A. Puttipipatkajorn, C. Rabaud, T. Salgado-Jimenez, A. Sanchez-Lopez, B. Telle
Introduction
Les cinq thèmes de recherche de cet axe : "Localisation et perception de l’environnement", "Robotique sous-marine", "Navigation réflexe", "Planification multi-chemins et coopération de robots multiples" et "Evaluation des performances d’un robot manipulateur à roues" traitent de l’autonomie de machines complexes (robots mobiles) évoluant dans des environnements non structurés (inconnus) ou quasi-structurés. La capacité à réaliser des tâches complexes dans ce type d’environnement est une propriété essentielle des robots d’intervention, qu’ils soient marins ou terrestres. La gestion de capteurs évolués (caméras, sonars, etc.) et l’interprétation d’informations sophistiquées, obtenues dans ces milieux non coopératifs, sont des étapes très importantes pour cette autonomie. On notera le renforcement des recherches et applications relatives à la coopération de robots mobiles, terrestres et sous-marins, avec diverses approches prenant en compte le fait que les ressources de perception, décision, action et communication peuvent être ou non limitées, qu'elles soient hiérarchisées et/ou distribuées. Dans tous les thèmes, les méthodes et outils développés s'appuient sur les principes de l'Automatique, la finalité étant d'améliorer les performances statiques et dynamiques de systèmes grâce à des commandes avancées utilisant les informations issues de leurs capteurs proprioceptifs et extéroceptifs. Enfin, comme dans l'axe "Synthèse de systèmes dynamiques complexes", un effort particulier est fait pour valider expérimentalement nos travaux sur des plates-formes mono- et multi-robots réelles.
Localisation et perception de l'environnement
Ces travaux portent sur le développement et la validation expérimentale de méthodologies de modélisation de l'environnement et de localisation de robots, mettant en œuvre des systèmes multi-sensoriels de perception et de fusion de données. La localisation référencée environnement permet de pallier les inconvénients de la navigation à l'estime. Les solutions que nous étudions sont basées sur la mise en correspondance d'un modèle local de l'environnement acquis en ligne, avec un modèle global construit et mis à jour grâce aux mesures des capteurs du véhicule. Les algorithmes proposés prennent en compte l'incertitude et l'imprécision des données (erreurs de mesure ou d'interprétation, artefacts, retards induits par les temps de calcul) ainsi que la mauvaise connaissance du modèle d'environnement (présence d'obstacles inconnus a priori, environnements dynamiques, etc.).
Localisation 2D par mise en correspondance de cartes
L'objectif est de proposer des solutions multi-capteurs robustes pour la construction du modèle et la navigation dans des environnements 2D semi-structurés, évolutifs et non connus a priori (thèse de G. Borges). Les modèles utilisés sont des cartes constituées de lignes droites et de points caractéristiques de l'environnement. Ci-après, la figure de droite présente par exemple une carte globale d’environnement intérieur construite par fusion de données issues d’images vidéo et d'images télémétriques (figure de gauche). La segmentation de l'image laser utilise un algorithme de "clustering" flou pour extraire, par le biais d'une procédure de segmentation–fusion, des indices de
147

type points et droites 2D matérialisant les frontières des obstacles visibles par le télémètre. Les images vidéo fournissent des verticales caractéristiques de l’environnement qui, projetées dans la carte de distance, deviennent des points photométriques s'ajoutant aux indices extraits des images laser.
Mesures télémétriques Modèle global utilisé pour l'appariement En pratique, la construction du modèle global est basée sur la fusion de cartes locales obtenues pour différentes positions du robot et fait appel à la mesure odométrique des déplacements entre ces différentes positions. Sa cohérence est assurée par une prise en compte rigoureuse des différentes sources d'incertitude (erreurs de mesures, bruit introduit par les processus de segmentation, etc.). La localisation absolue du véhicule dans un repère attaché à la carte de référence est réalisée en trois phases:
• une prédiction de la position obtenue grâce aux capteurs proprioceptifs,
• une mise en correspondance des primitives géométriques qui constituent la carte locale avec celles de la carte de référence,
• une estimation de la position du véhicule et de son incertitude, dans un repère attaché à la carte de référence.
L’estimation est réalisée par une technique d’optimisation non-linéaire dont les performances ont été évaluées en simulation et en site réel. Une étude comparative a montré ses avantages par rapport aux solutions classiques utilisant le filtre de Kalman.
Localisation 3D par mise en correspondance de points d'intérêt
Ce travail (thèse de B. Telle) a pour domaine d’application la localisation 2D et/ou 3D de véhicules mobiles navigant dans des environnements naturels. L’absence de structure modélisable par des éléments géométriques simples de type droite ou segment nous a conduit à étudier une représentation de cet environnement par un ensemble de points 3D facilement identifiables. Nous avons choisi d’utiliser des points d’intérêt extraits d’images couleur. Ces données fournies par une
148

paire de caméras stéréo permettent de construire un modèle d'environnement sous forme d’un nuage de points auxquels sont attachées des informations 3D et couleur. La localisation du véhicule est basée sur la mise en correspondance du nuage de points observé localement avec le modèle de référence global construit au préalable. La première phase de cette étude a porté sur l’extraction et l'appariement de points d’intérêt dans les images couleur : choix d’un espace couleur approprié, détection de points significatifs et caractérisation de ces points par des attributs invariants aux conditions d’observation. Les étapes suivantes concerneront :
• la construction du modèle 3D/couleur issu d’une paire stéréo calibrée ;
• la reconstruction du modèle global à partir de nuages de points obtenus pour différentes positions du capteur stéréo ;
• la localisation par mise en correspondance du nuage de points observé avec le modèle de référence global.
Perception visuelle de l'espace et du mouvement
Ce travail concerne la perception d'un environnement majoritairement statique par une caméra en mouvement.
Estimation du mouvement majoritaire dans une séquence vidéo Lorsqu'une caméra est en mouvement dans un environnement majoritairement statique, ce déplacement induit dans l'image acquise des variations de niveaux de gris donnant l'impression, à la visualisation, d'un déplacement des projections des objets perçus. Il existe trois grandes familles de méthodes permettant de retrouver ce mouvement apparent (corrélation, flot optique, appariement de point d'intérêts). La plupart de ces méthodes manquent de robustesse vis-à-vis du modèle de mouvement, de la relation supposée entre mouvement spatial et variation de niveaux de gris, des mouvements minoritaires induits par des objets se déplaçant dans la scène, etc. Nous avons développé une nouvelle méthode d'estimation statistique (les histogrammes quasi-continus) pour résoudre ce problème de façon élégante et efficace. La comparaison des résultats obtenus avec ceux donnés par des méthodes classiques ont montré un accroissement notable de la robustesse. Certains problèmes liés à la combinatoire de l'estimateur ont été contournés pour obtenir un estimateur temps réel. Ce travail (thèse de F. Comby) a fait l'objet de nombreuses applications pour la création d'images sous-marines haute résolution (mosaïques d'images) et stabilisation de séquences vidéo (retrait du mouvement parasite induit par la prise d'image).
Reconstruction d'une mosaïque à partir de 300 images sous-marines consécutives
149

Vision omnidirectionnelle Une caméra omnidirectionnelle est une caméra donnant une image de l’environnement couvrant 360°. Pour réaliser un tel capteur, on munit une caméra classique d’un réflecteur catadioptrique de forme conique, parabolique ou hyperbolique délivrant une image anamorphosée. Nous envisageons l'utilisation d'une telle caméra d'une part pour reconstruire des mosaïques pariétales (descente de la caméra dans un forage d'inspection) et, d'autre part, pour estimer le mouvement d'un robot mobile en environnement intérieur, voire extérieur (thèse de C. Rabaud). Une première étude nous a permis d'élaborer une méthode originale de désanamorphose de l'image.
Image anamorphosée Image désanamorphosée
Robotique sous-marine
Outre la conception du prototype de véhicule sous-marin autonomeTAIPAN, nous avons travaillé sur quatre thématiques :
Navigation et positionnement
Sur ce thème, le moment fort a été notre participation au Joint Project Research GOATS'2000, NATO, pendant les mois de septembre et d’octobre 2000 dans la baie de Biodola de l’île d’Elbe. TAIPAN était l’un des trois véhicules à être engagé dans les expérimentations du projet à côté de l’Odyssee du MIT et de l’Ocean Explorer du FAU. Le rôle de TAIPAN était d’effectuer des relevés de CTD (température, conductivité et profondeur) le long de trajectoires définies par les équipes de modélisation de Harvard et du Saclatcen dans le volet REA (Rapid Environmental Assessment) du projet. Cette manifestation nous a permis de faire la preuve que notre véhicule était fiable et opérationnel. La commande en mode glissant ainsi que le positionnement à l’estime recalé par GPS, nous ont permis de réaliser plus de 23 missions sans échec après les phases de mise au point. Une collaboration pour 2002 et 2003 sur le thème des flottilles de véhicules sous-marins autonomes, qui suppose le déploiement de trois appareils, a été proposée et acceptée par le Saclantcen. Il nous faut obtenir l’accord définitif de la DGA pour officialiser notre participation.
150

TAIPAN : dernière version équipée d’un modem acoustique et de sondeurs intégrés dans la tête
Positionnement actif
Le concept de véhicules à faible coût entraîne la mise en œuvre d’un matériel et d’une instrumentation en adéquation. Ce concept engendre alors une perte d’efficacité sensorielle qui doit être compensée par une amélioration notable du traitement de l’information. Nous avons abordé le problème du positionnement acoustique basé sur le principe des "bases longues" mais ne mettant en œuvre qu’une seule balise au lieu de 3 à 5. Une mesure unique de distance ne permet pas la résolution immédiate du positionnement, aussi avons-nous développé une méthode qui optimise la trajectoire du véhicule afin d’être en mesure de déterminer de façon optimale la position de celui-ci par rapport à une balise dont la position est a priori inconnue. L’utilisation de la matrice d’information pour déterminer cette trajectoire représente l’élément clé de la méthode. Ce travail a été réalisé dans le cadre de la thèse de P. Baccou. Une démonstration en mer aura lieu au début du mois de janvier 2002.
Suivi de fond et évitement d’obstacles
Ce thème qui fait l’objet de la thèse de V. Creuze, aborde de façon nouvelle le problème du suivi de fond. La méthode proposée repose sur la définition de trajectoires locales construites à partir de données bathymétriques acquises en ligne. Les trajectoires devant être compatibles avec la dynamique du véhicule, celles-ci représentent des courbes lissées des fonds à suivre. La modélisation des fonds qui a été développée, permet en outre de réaliser une commande prédicitive d’évitement d’obstaces.
Coordination réactive de flottille
La gestion et la coordination de flottille est un sujet d’actualité en robotique sous-marine. Nous avons initialisé cette étude dans le cas de la gestion de flottille de balises motorisées permettant de suivre les évolutions d’un véhicule sous-marin et de déterminer sa position. Le travail de DEA de M. Michelin a abouti à la conception d’une commande coordonnée et centralisée d’une flottille s’appuyant sur l’optimisaiton de la borne de Kramer-Rao définissant la borne théorique de l’erreur d’estimation de la position du véhicule. Cette méthode a été profondément modifiée pour aboutir à une approche dite réactive s’appuyant sur la notion de ZVD proposée par R. Zapata. Dans cette approche, la zone déformable est définie par la position de chaque véhicule de la flottille. L’étude se poursuit actuellement dans le contexte de la fusion de données multi-plateforme.
Nouvelles thématiques
En septembre 2001, deux nouvelles thèses ont débuté (A. Puttipipatkajorn et T. Salgado-Jimenez). Les thèmes abordés concernent pour l’un la commande référencée à un sonar latéral afin de suivre une structure artificielle ou naturelle sous-marine, pour l'autre le traitement d’image acoustique issue d’un sonar latéral pour la détection d’objets sur le fond marin et de panaches d’eau douce sous-marine.
151
Navigation réflexe
Depuis 1990, nous avons mené une réflexion sur la commande réactive des robots mobiles intégrant des informations proprioceptives et extéroceptives, non pas à un niveau symbolique (représentation sémantique de l’environnement sous formes d’objets caractéristiques) mais à un niveau "brut" (représentation sensorielle de l’environnement ). Cette commande référencée aux capteurs est sous-tendue par le concept de Zone Virtuelle Déformable (ZVD) et a été d’abord appliquée à l’évitement des collisions dans un environnement non structuré, puis étendue à la réalisation de tâches prédéfinies. Nos thèmes de recherche depuis 1998 sont directement issus de cette approche. Ils sont présents sur trois axes théoriques (Navigation/pilotage, Planification de chemins et Vision artificielle) et sur un axe expérimental d’intégration et de validation de ces trois aspects théoriques. Depuis 1994, nous avons également mené une étude sur la commande des robots marcheurs. Cette étude à donné lieu à deux thèses dont celle de E. Mateo en 1999. Depuis, ce thème a été abandonné par notre groupe, faute de moyens.
Navigation, pilotage et commande réflexe des manipulateurs mobiles
Cet axe est une extension de la commande réflexe par ZVD au cas des manipulateurs mobiles, c’est-à-dire des robots mobiles équipés de bras manipulateurs. Nous avons réalisé un simulateur paramétrable de manipulateurs mobiles évoluant dans des environnements inconnus et mesurés par des capteurs proximétriques simulés. Ce travail a montré la pertinence de la méthode des ZVD pour des cas complexes. Nous avons également développé un simulateur pour valider la commande réflexe de tâches usuellement traitées par une approche "planification" (manœuvres de véhicules, suivi de trajectoires). Un autre travail entamé est la commande coordonnée de manipulateurs mobiles travaillant sur des tâches nécessitant une coopération de robots (thèse de J. Albaric).
Planification de chemins
Depuis 2000, nous travaillons sur la planification de chemins pour des plate-formes multi-manipulateurs mobiles. Notre objectif est le couplage de méthodes de planification quasi-aléatoires (PRM) avec la méthode des Zones Déformables. Notre objectif est l’accélération des procédures de recherche de chemins pour des systèmes possédant un grand nombre de degrés de liberté dans des environnements quasi-structurés (thèse de A. Sanchez-Lopez).
Vision artificielle
La prise en compte d’informations visuelles est l’objectif suivant que nous nous sommes fixés pour la commande réflexe des manipulateurs mobiles (thèse de D. Ocampo). Nous avons étudié la possibilité d’intégration sur silicium de processus de vision artificielle d'inspiration biologique pour la commande des machines autonomes. En collaboration avec le département Microélectronique, nous avons réalisé et testé les algorithmes de perception-commande qui seront implantés sur des circuits programmables de type FPGA. Notre approche est basée sur de la stéréovision classique et sur de la vision dynamique. Nous collaborons également avec des biologistes (un projet Jeune Equipe en 1999 avec le LPPA du Collège de France et un projet ROBEA "Psikharpax : synthèse d’un rat artificiel" à partir de 2001).
Plate-forme multi-manipulateurs mobiles
Les résultats théoriques obtenus et à venir feront l’objet d’une intégration sur une plate-forme composée de trois manipulateurs mobiles travaillant à la réalisation de tâches coopératives (surveillance, transport d’objet, communication). Nous avons écrit les spécifications de cette plate-forme et entamé sa réalisation. Pour cette réalisation, nous avons obtenu un financement d'équipement par la Région Languedoc-Roussillon.
152
Collaborations
Au sein du département Robotique, nous collaborons avec le groupe Architectures en ce qui concerne la définition et la réalisation de l’architecture de contrôle global de la plate-forme multi-manipulateurs mobiles. Au sein du laboratoire, nous collaborons avec le département Microélectronique pour l’implantation d’algorithmes de vision sur des circuits programmables. Au niveau national, dans le cadre du projet ROBEA déjà mentionné, nous collaborons avec le LPPA du Collège de France et le Laboratoire d’Informatique de Paris 6. Enfin, au niveau international, nous collaborons avec l’Institut Technologique de Toluca au Mexique, pour la mise au point d’une plate-forme expérimentale multi-manipulateurs mobiles.
Planification multi-chemins et coopération de robots multiples
Le premier volet des travaux a concerné la poursuite et la fin des études sur la recherche de méthodes de génération d’ensembles de chemins quasi-optimaux, en temps ou consommation, utilisables par des ensembles de robots mobiles en terrain inégal. La génération se fait hors ligne et la robustesse des solutions vis-à-vis des incertitudes a priori et des variations imprévues de l’environnement est assurée par le caractère multi-chemins et les communications entre robots. La méthode utilisant un modèle des fluides visqueux incompressibles avec friction a été approfondie (C. Louste) pour tenir compte des contraintes cinématiques et dynamiques des véhicules. Les recherches ci-dessus concernent des ensembles de robots autonomes plutôt cognitifs puisqu’ils ont en mémoire une carte de leurs routes possibles, des stratégies de changements d’itinéraire en cas d’aléa, et sont dotés de moyens de communications assez performants permettant à chacun de connaître l’état des autres et de leurs environnements. Depuis environ quatre ans, nous avons en même temps infléchi les recherches vers les ensembles d’agents plutôt réactifs, qui ne connaissent qu’un environnement local limité, et ne communiquent, de façon rustique, qu’avec les robots voisins immédiats. Ils ne connaissent pas non plus la tâche globale qui résultera de leur coopération, mais seulement des actions et communications locales guidées par leur propre instinct. Le travail de thèse de P. Rongier a démontré les possibilités et les limites d’une modélisation par réseaux de Petri stochastiques et chaînes de Markov pour prédire le comportement transitoire et les probabilités de succès d’ensembles de robots coopérants. L’aspect stochastique est dû, d’une part au caractère aléatoire de l’état de l’univers, et d’autre part, à un comportement de "marche aléatoire" utilisée par les robots à la recherche d’information. Des ensembles homogènes et hétérogènes de robots ont été étudiés. La rapidité des calculs basés sur les modèles théoriques est mille fois supérieure à l’utilisation intensive de simulations, ce qui fait de la méthode développée un outil prometteur pour l’analyse et la synthèse d’ensemble multi-robots. On a également commencé à effectuer des expérimentations avec des mini-robots réels (conçus par P. Lucidarme). La collaboration avec une équipe de Neurosciences (Labo Perception et Mouvement, Marseille) dans le cadre d’un pré-projet ROBEA va ouvrir de nouvelles perspectives par l’analyse et la modélisation des systèmes sensori-moteurs chez l’Homme. Ces dernières recherches complètent, avec une démarche d’automaticien, les recherches interdisciplinaires effectuées avec le département ARC (J. Ferber et coll., codirection de thèse de O. Simonin).
Evaluation des performances d’un robot manipulateur à roues
Depuis plus de 30 années maintenant, de nombreuses architectures de robots manipulateurs séries ou parallèles, rigides ou souples, redondantes ou non, dotées d’articulations rotoïdes ou prismatiques ont été largement étudiées. Les robots mobiles ont eux aussi été l’objet d’études plus particulièrement focalisées sur la non-holonomie des équations cinématiques des engins à roues. L’intérêt des robots
153
mobiles omnidirectionnels est apparu plus tard, d’abord lors de l’utilisation des roues suédoises, puis des roues "de caddy", décentrées et orientables. Le LIRMM a été le premier laboratoire français à développer un robot mobile à roues décentrées orientables. Ce démonstrateur a permis d’appréhender les spécificités d’un tel mécanisme et de développer une commande adaptée. L’étude menée dans le cadre de la thèse de J. Aragones considère le robot mobile plan à trois degrés de liberté, comme un manipulateur à roues. En effet, l’omnidirectionnalité du système permet de concevoir des mouvements et une commande totalement analogues à ceux d’une structure articulée à trois degrés (deux translations et une rotation orthogonale indépendantes). Les spécificités du système sont, d’une part la liaison de roulement et de pivotement des roues sur le sol et, d’autre part, la nécessaire surmotorisation (au moins quatre axes doivent être motorisés). Les efforts extérieurs, les efforts liés à la dynamique du mobile, mais aussi les défauts de modélisation géométrique ou les comportements transitoires des asservissements peuvent conduire soit à une déformation élastique du bandage des roues, soit à une diminution voire à une perte d’adhérence des roues sur le sol. Deux étapes fondamentales de la commande d’un tel système ont été étudiées :
• la génération de mouvement hors ligne, puis en ligne en fonction des instructions reçues du niveau supérieur de planification et du niveau inférieur d’évitement de collisions. Une méthode originale en robotique mobile a été évaluée en simulation puis sur le démonstrateur ;
• la commande dynamique du système utilise la redondance d’actionnement pour limiter les risques de glissement dans la liaison roue/sol.
La fin du travail de thèse devrait conduire à évaluer l’amélioration des performances du robot omnidirectionnel doté de sa nouvelle commande par rapport aux méthodes classiques de la robotique mobile. Si l’amélioration de la précision de répétabilité du robot omnidirectionnel est sensible, il pourra alors remplacer un manipulateur cartésien de très grande dimension (pont roulant). Ceci ouvrirait la voie à de nombreuses applications industrielles dans les domaines de la construction aéronautique, du bâtiment industrialisé, de la manipulation précise et de l’assemblage d’objets de grandes dimensions.
154

Gestion et supervision des systèmes complexes
Travaux de : D. Andreu, D. Crestani, F. Prunet, M. Bennour, J.-D. Carbou
Introduction
Ce thème regroupe deux volets, la productique et la supervision des systèmes hybrides. Ils sont liés par les modèles et les méthodes qu’ils utilisent et empruntent aux systèmes à événements discrets et aux systèmes hybrides. Ils font très largement appel à la coopération avec d’autres équipes du département, soit dans la définition des objectifs à atteindre (pour la robotique et l’assistance médicale) soit dans la recherche de solutions (avec les informaticiens du LIRMM et les spécialistes des Sciences Humaines et Sociales). Durant les quatre dernières années, le thème productique a évolué et l’optimisation des chaînes de production rapides sur laquelle nous travaillons depuis dix ans a cédé la place à la modélisation d’entreprise et à la prise en compte explicite de l’homme dans les processus d’entreprise pour en améliorer les performances et en diminuer les aléas. La supervision des systèmes hybrides, thème apporté par la venue en 1997 de D. Andreu, Maître de Conférences, se développe et constitue un point fort de coopération et de synergie entre plusieurs équipes du département. Elle répond à un besoin interne de rationalisation et d’optimisation de la commande des systèmes robotiques et/ou d’assistance médicale.
Modélisation d'entreprise
Les activités de recherche relevant de ce thème scientifique se sont développées dans le cadre du projet Armines « Aide à la modélisation et à l'analyse des aléas de production ». Cela s'est traduit par la soutenance de thèse de C. Covès qui a proposé une méthodologie d'analyse qualitative et quantitative de processus d'entreprise comme indiqué sur la figure.
Méthodologie d'étude des processus d'entreprise L'étude qualitative permet de vérifier la cohérence tant structurelle que comportementale de la modélisation d'un processus d'entreprise décrit essentiellement en termes d'activités, de ressources et
155

de produits transformés. Cette étude s'appuie sur des règles de traduction du modèle initial en un réseau de Petri équivalent. Ce réseau est alors analysé vis-à-vis des propriétés de bon fonctionnement (bornage, vivacité, réinitiabilité, invariants, etc.) afin de détecter les erreurs de modélisation éventuelles et de les corriger au niveau du modèle d'entreprise initial. Une fois le modèle de processus validé, une analyse quantitative est entamée. Elle consiste à étudier, selon un point de vue (axe de performance) donné (financier, temporel, qualité, etc.), l'évolution de la performance du processus à analyser. La grande originalité de cette approche est de chercher à prendre en compte de façon explicite l'impact des caractéristiques et compétences humaines sur le déroulement du processus. Pour ce faire, les savoir-faire humains sont actuellement modélisés à l'aide de lois empiriques et de bon sens (thèse de M. Bennour).
Description et validation des systèmes complexes
Cette problématique reste d'actualité pour la maîtrise des systèmes industriels complexes. P. Finotto dans sa thèse avait largement étudié l'impact d'une approche incrémentale de description de système sur le calcul des invariants. Cependant, nombre de questions sont restées en suspens relativement à l'apport d'une telle approche pour la construction incrémentale de graphe de couverture. C'est pourquoi, nous nous sommes intéressés, en collaboration avec nos collègues du département IFA, à la complexité temporelle asymptotique des algorithmes proposés par Karp et Miller et par Finkel. Nos conclusions sont que, si l'apport d'une démarche incrémentale de conception semble indiscutable sur un plan méthodologique, une telle approche n'induit aucun bénéfice par rapport à une démarche globale, bien au contraire, lors de la phase de validation formelle.
Supervision de systèmes hybrides
Ces travaux relatifs au pilotage de systèmes autonomes sont en amont des domaines d’application ; ils sont appliqués aussi bien dans le cadre du contrôle de robots mobiles d'intervention que dans celui du contrôle d'un stimulateur électrique neural distribué pour la réhabilitation de la marche chez le paraplégique. De la conception à l'exécution, nos recherches dans cet axe concernent un ensemble de thèmes étroitement couplés (voir également le paragraphe « Télérobotique et environnements virtuels » dans le chapitre « Synthèse de systèmes dynamiques complexes ») : la modélisation de systèmes dynamiques hybrides (thèse de J.-D. Carbou), le pilotage à distance, l'architecture matérielle et logicielle de commande temps-réel. Ces travaux sont complémentaires dans l'optique d'une conception globale, cohérente et évolutive. A l’image de nos collaborations (roboticiens, informaticiens, microélectroniciens), ils sont également le reflet de la pluridisciplinarité intrinsèque de la problématique de commande, parfois à distance, de systèmes hybrides. Parallèlement à la poursuite de travaux sur la modélisation basée sur les réseaux de Petri (objets, hybrides, hiérarchisés), nous avons conçu, en collaboration avec des membres du département ARC et du groupe OSCD du LAAS, une chaîne complète édition–analyse–compilation-exécution de notre modèle. Son développement devrait s’achever au premier semestre 2002. L’objectif de cet atelier logiciel est de favoriser la réutilisabilité, l’évolutivité et la pérennité des développements effectués dans le cadre de nos plates-formes robotiques expérimentales. Notre collaboration avec les informaticiens se poursuit dans le cadre de la définition d’un modèle de composant logiciel pour la robotique, composant dont la sémantique opérationnelle (comportement) est décrite à l'aide du support formel des réseaux de Petri. La spécification, l’analyse et l’exécution (joueur temps-réel) sont supportées par l’environnement précédemment évoqué. Les composants doivent être ouverts et adaptables. La problématique d'adaptabilité de l'application à l'environnement (au sens global) est d'ailleurs à l'articulation entre les deux thématiques et constitue un aspect fondamental de nos recherches. Les composants doivent premièrement être adaptables afin de permettre leur paramétrage au moment de l'assemblage. Ce paramétrage devra pouvoir être structurel mais aussi fonctionnel. Deuxièmement, il est indispensable, dans l'optique d'applications
156
embarquées, que les composants soient capables, durant leur exécution, de s'adapter dynamiquement aux modifications de leur environnement (fonctionnement d'un composant en "mode dégradé" par exemple). Ceci suppose de pouvoir doter les composants de fonctionnalités d'auto-configuration qui impliquent une architecture réflexive.
157


Prospective
Synthèse de systèmes dynamiques complexes
Il s'agit de développer des outils théoriques et méthodologiques robustes pour le contrôle et la commande de systèmes complexes en vue d'augmenter leurs performances et leur autonomie. Ces outils seront validés sur les plates-formes expérimentales et prototypes du département. Les thèmes de recherche centraux sont :
• doter les machines dès leur conception de capacités d’adaptation et d’autonomie : auto-étalonnage, auto-réglage (Projets ROBEA, MACH21, AHEAD-2002/2004) ;
• planification et commande de gestes chirurgicaux complexes (opération à cœur battant): définir et valider des techniques d’apprentissage de tâches (sutures, nœuds, ligatures) et d’adaptation aux variations de l'environnement grâce à un contrôle des efforts d’interaction instrument/tissus approprié (projets ROBEA, ENDOXIROB) ;
• conception de systèmes de restauration et de contrôle de mouvement d'un membre paralysé ; implantation sur l’homme de stimulateurs et capteurs distribués, associés à un contrôle en boucle fermée (projet LIRMM-INRIA hors site DEMAR, ROBEA). Ceci passe par la simulation fine de la locomotion bipède (marche, course), pathologique ou non ;
• modèles et outils pour la représentation des interactions homme/machine/environnement : définir et valider de nouveaux outils permettant la modélisation des interactions (détection de collision, déformations plastique ou élastique, étalonnage des modèles) en relation avec des mesures (vision, effort) réalisées sur l’environnement. Ces travaux serviront dans la mise en œuvre de stratégies d’aide au geste pour la télérobotique et la conception de nouveaux produits (projet SPRINTT et montage d’un projet RNTL) ;
• commande (position/force) robuste de systèmes distants soumis aux perturbations intrinsèques d’un réseau asynchrone sans fil (Bluetooth, IEEE802.11b) (collaboration ICARE-LIRMM-LIMOS) ; conception d’une architecture embarquée distribuée ouverte, réflexive, fondée sur l'assemblage de composants logiciels et mixtes (collaboration inter-départements LIRMM).
Navigation, perception et pilotage de véhicules autonomes
Le but poursuivi est l’autonomie décisionnelle des robots mobiles dans des environnements complexes et inconnus. L’utilisation et l’intégration de capteurs logiciels sophistiqués, ainsi que la fusion de données sont des outils qui permettront de tendre vers cette autonomie. Les thèmes de recherche centraux sont :
• conception d’une plate-forme multi-manipulateurs mobiles pour l’étude et la validation expérimentale de diverses approches de coordination multi-robots ;
• doter les robots mobiles autonomes de capacités d’auto-apprentissage, d’auto-adaptation, d’auto-organisation originales basées sur les principes de l'Automatique et de la Cybernétique. L'approche markovienne notamment mérite d'être approfondie et consolidée. Ouverture vers les neurosciences (pré-projet ROBEA) ;
159

• robotique sous-marine : étude de schéma de commande robuste, commande référencée capteur pour le suivi de pipeline, imagerie acoustique pour la détection de source d'eau douce (projet SPRINTT et, en négociation, projet RITEAU).
• modélisation de l'environnement et localisation de robots : développement de systèmes multi-sensoriels de perception (stéréovision, vision couleur, télémétrie) utilisant des techniques avancées de traitement de l'information pour réaliser la mise en correspondance de données imprécises et incertaines, l'estimation des mouvements, ainsi que la construction et la mise à jour des modèles d'environnement.
Gestion et supervision de systèmes complexes
L'objectif est de développer des outils et des méthodologies permettant de maîtriser la complexité de ces systèmes en empruntant aux systèmes à événements discrets et aux systèmes hybrides :
• dans le domaine de la maîtrise des aléas en productique, il s'agit de renforcer la coopération avec les sciences humaines et sociales, pour élaborer des modèles d'analyse plus fins de l’impact de l’homme et de ses compétences sur les processus d’entreprise ;
• dans celui des systèmes hybrides, il s'agit de mettre au point des modèles formalisant les interactions discret/continu et de proposer une architecture permettant la réalisation d'applications embarquées (réparties, temps-réel) par assemblage de composants logiciels et mixtes.
160

Projets inter-départements
CoconutInformatique et Chimie
Rapport d’activité du LIRMM 1998-2001


COCONUT (IFA – ARC)
Permanents : C. Bessière (responsable), F. Koriche, J. Quinqueton Doctorants : H. Cros, A. Maestre, P. Lemoisson ; T. Petit Extérieurs : R. Debruyne, P.David
Contexte des travaux
Le projet COCONUT a été créé en octobre 2000 à partir d’un noyau de personnes appartenant aux départements ARC et IFA, et qui travaillaient déjà ensemble depuis plusieurs années. Les thèmes de recherche du projet appartiennent tous au domaine de l'intelligence artificielle. Ils sont centrés sur trois secteurs : les "modèles de raisonnement", les "contraintes" et les "systèmes multi-agents". L'objectif principal du projet est de combiner les paradigmes, formalismes et algorithmes étudiés dans ces divers secteurs pour faire émerger de nouveaux résultats théoriques et des applications logicielles. Nous décrivons ici les travaux qui ont débuté au sein de ce projet ainsi que diverses perspectives de recherche.
Principaux résultats obtenus entre 1998 et 2001
Problèmes incohérents
Depuis quelques années, le modèle de max-CSP et des CSP valués ont supplanté le modèle des CSP dynamiques pour la résolution de problèmes où en plus des contraintes de base du problème, à satisfaire obligatoirement (appelées aussi contraintes physiques ou contraintes dures), on dispose d'un ensemble de contraintes dites de préférence qui permettent de décrire des solutions préférées à d'autres. Ces nouveaux paradigmes sont beaucoup plus rigides que ce qu'était le modèle CSP dynamique, et permettent difficilement de modéliser les désirs de l'utilisateur, surtout quand ils sont insatisfiables simultanément. Petit, Régin et Bessière ont proposé un nouveau formalisme, adapté aux besoins de l'utilisateur. Ils ont ensuite proposé des techniques de calcul de bornes, orthogonales à celles basées sur des compteurs d'inconsistances. Elles peuvent donc s'y ajouter, permettant de couper encore plus tôt les branches dans un Branch & Bound. Enfin, des algorithmes spécifiques de filtrage de contraintes dans le cadre des problèmes incohérents ont été proposés.
Approximation de connaissances
L'approximation de connaissances est un paradigme récent qui étend l'approche classique des bases de connaissances en permettant de retourner un ensemble de solutions approximatives à une requête donnée. L'idée sous-jacente réside dans le fait que, lorsqu'un problème est trop difficile à résoudre, l'agent retourne des solutions partielles dont la qualité dépend des ressources de calcul disponibles. Ainsi, l’approximation de connaissances offre un compromis entre la complexité temporelle et spatiale nécessaire à la déduction d’information et la qualité de cette déduction. En ce basant sur ce paradigme, nous avons élaboré au cours de ces trois années un cadre logique pour l’approximation de connaissances. Ce cadre est fondé sur une famille de logiques multi-modales utilisées pour :
• spécifier formellement des agents à rationalité limitée,
• construire des algorithmes “anytime” permettant de répondre de manière interruptible et incrémentale à des problèmes de déduction.
163
Ce cadre logique a été appliqué dans trois grands domaines des systèmes à base de connaissances :
• le raisonnement propositionnel : nous avons développé une famille de logiques permettant de modéliser des stratégies de résolution et d’énumération approximative ;
• le raisonnement d’ordre un : nous avons récemment élaboré une logique permettant de spécifier des systèmes de raisonnement à instanciations partielles ;
• le traitement des incohérences : nous avons récemment présenté un modèle d’approximation fondé sur le traitement des sous-ensembles préférés consistants.
Apprendre à raisonner
De nombreuses applications en Intelligence Artificielle utilisent les concepts de “base propositionnelle” ou de “réseau de contraintes” pour représenter les connaissances. Lorsque l’utilisateur pose des requêtes fréquentes, le système peut être amené à, non seulement déduire les requêtes, mais aussi apprendre à répondre dans le but de retourner rapidement des solutions connues ou déjà pré-traitées. En se fondant sur ce paradigme “apprendre à raisonner”, nous avons récemment étudié deux formes d’assimilation de connaissances :
• la compilation de connaissances ou assimilation “off-line”, qui permet de transformer par induction ou déduction une base de connaissance en une structure de données permettant de rendre les réponses aux requêtes plus rapides, et
• l’apprentissage par instances ou assimilation “on-line” qui permet d’induire des réponses aux requêtes, en se fondant sur des relations de similarité construites à partir des solutions et contre-solutions de la base ou du réseau.
Réseaux de contraintes distribués
Les réseaux de contraintes sont de plus en plus considérés comme un moyen de formaliser la coopération dans un système multi-agents. Il devient donc indispensable de disposer d'outils convenables pour résoudre les problèmes de satisfaction de contraintes sous-jacents. En 1998 et 1999, Hamadi, Bessière et Quinqueton ont proposé un algorithme simple de recherche de solution dans un réseau de contraintes distribué et un algorithme de propagation de contraintes optimal en envoi de message. A partir de 2000, Bessière, Maestre et Meseguer ont proposé un schéma général d'algorithme de résolution de réseaux de contraintes distribués. Ce schéma laisse la possibilité de prendre en compte un certain degré de confidentialité des données, et surtout, regroupe les algorithmes connus précédemment dans un même schéma qui permet d’étudier leurs similitudes et différences.
Perspectives de recherche
Nos perspectives de recherche consistent avant tout à progresser dans les divers chantiers mis en place au cours de l'année 2000/2001. En se basant sur les axes "modèles de raisonnement", "contraintes" et "systèmes multi-agents", nos préoccupations actuelles concernent notamment l'approximation de connaissances dans les réseaux de contraintes, l’approximation de connaissances dans les systèmes multi-agents, la compilation approximative, l’apprentissage à partir de réseaux de contraintes, la planification à base de contraintes, et la formalisation de la communication dans les réseaux de contraintes distribués.
164

Collaborations en cours en 2001
• ILOG S.A
• IIIA-CSIC, Barcelone
• University College, Cork
165

Informatique et chimie (IFA – ARC)
Participants : Y. Ahronovitz, S. Berasaluce, C. Bessière, R. Ducournau, M. Habib, P. Jambaud, C. Laurenço, T. Libourel, J. Quinqueton, Y. Tognetti, P. Vismara.
Contexte des travaux
Ce projet est commun aux deux départements d'informatique du LIRMM : ARC et IFA. Il est partie intégrante d'un projet national, développé dans le cadre du GDR 1093 du CNRS intitulé « Traitement informatique de la connaissance en chimie organique » (directeur : C. Laurenço, directeur adjoint : M. Habib), où il occupe une place prépondérante. Le GDR 1093 a été créé en 1993, par le département des Sciences Chimiques du CNRS, soutenu par plusieurs sociétés de l'industrie chimique et de l'industrie informatique, ainsi que par le département des Sciences pour l'Ingénieur du CNRS. Ses objectifs sont de modéliser la connaissance et les raisonnements utilisés pour résoudre des problèmes de synthèse organique, de rechercher et développer des techniques informatiques permettant l'application des modèles chimiques élaborés, et d'évaluer la faisabilité d'un système informatique performant d'aide à la conception de plans de synthèse en chimie organique, un tel outil devant contribuer au développement de la synthèse multi-étapes ciblée. A la fin du GDR 1093, en décembre 2000, le département des Sciences Chimiques du CNRS a mis en place une équipe de recherche permanente à Montpellier sur le thème des systèmes d'information chimique. Intégrée à l'UMR 5076 et localisée à l'École Nationale Supérieure de Chimie de Montpellier, elle devrait devenir un pôle national chargé de coordonner un réseau thématique. Elle collabore étroitement avec l'équipe du LIRMM.
Principaux résultats
Nous avons poursuivi nos travaux dans le domaine de la modélisation et l'analyse de graphes moléculaires. Certains de ces résultats ont été publiés en 2000 dans un recueil d'articles édité par l'American Mathematical Society et auquel ont participé M. Habib, C. Laurenço et P. Vismara. Nous avons développé un algorithme de CSP pour la recherche des "décompositions symétriques maximales" d'un graphe. Il s'agit d'isoler dans un graphe deux sous-graphes partiels disjoints, connexes et isomorphes. En dehors de son intérêt purement algorithmique, ce type de décomposition peut être utilisé en chimie organique pour élaborer des stratégies de synthèse performantes. Ce travail a fait l'objet d'une publication de Y. Tognetti et P. Vismara, présentée au congrès RFIA 2000. Il s'inscrit dans le cadre d'une collaboration avec C. Bessière, de l'équipe CSP (Satisfaction de contraintes). Dans le domaine du raisonnement par classification, les méthodes que nous avons développées jusqu'à présent s'appuient sur la recherche d'appariements exacts (isomorphisme de sous-graphe partiel). Le stage de DEA de Y. Tognetti, en 1998, était consacré à l'étude du problème de la classification approchée. Il s'agit d'étendre les techniques de classification exacte afin de pouvoir classer des objets ne possédant pas toutes les propriétés requises mais suffisamment proches d'objets présents dans la hiérarchie de graphes. Ce stage a permis d'obtenir un premier résultat dans la modélisation de la notion de proximité entre objets chimiques. Il a également mis en évidence les difficultés inhérentes à l'adaptation des algorithmes de matching formalisés dans le cadre des CSP. Cette étude se poursuit par la thèse de Y. Tognetti co-dirigée par R . Ducournau, C. Laurenço et P. Vismara.
167

Un premier travail a fait apparaître le besoin de déterminer les similitudes entre graphes chimiques. Le simple calcul du plus grand sous-graphe commun ou d'une quelconque distance d'édition n'est pas satisfaisant dans la mesure où il ne tient pas compte de la connaissance du domaine. Par ailleurs, il n'existe pas d'algorithmes efficaces pour résoudre ces problèmes. C'est pourquoi nous terminons actuellement la mise au point d'un algorithme qui, s'appuyant sur un ensemble de structures décrivant la connaissance du domaine, compare deux graphes en construisant leur plus grand sous-graphe commun qui est aussi une union de ces structures. Cet algorithme est basé sur des techniques de CSP. Nous avons par ailleurs commencé une première exploration de la modélisation de la structure d'un plan de synthèse. Le dessin habituellement fait par les chimistes n'a pas une structure manipulable et comporte beaucoup de sous-entendus. Un rapport de recherche de Y. Ahronovitz montre comment on peut construire un arbre à partir de ce dessin, et propose un ensemble de définitions de relations qui explicitent les sous-entendus : l'arbre et les relations associées constituent une modélisation de la structure d'un plan. Il donne aussi quelques premières définitions d'opérations sur ce type d'arbres. Un travail de thèse a été commencé en septembre 99 par S. Berasaluce, sur la fouille de données et l'extraction de connaissances à partir de grandes bases de données de réactions. L'objectif est de créer les procédures pour alimenter automatiquement les bases de connaissances de RESYN. Ce travail est fait en collaboration avec l'équipe Orpailleur du LORIA (A. Napoli). Nous avons enfin entrepris une collaboration avec A. Krief, des Facultés Universitaires Notre Dame de la Paix de Namur, sur le projet ENCORE d'encyclopédie multimédia orientée vers l'enseignement de la chimie organique. Un prototype est en cours d'étude, réalisé en collaboration avec I. Mougenot, à l'aide des outils Rex et Matisse de la société Euriware.
Valorisation
Les travaux entrepris sont menés dans le cadre d'une collaboration étroite entre chimistes et informaticiens. RESYN, le prototype d'un système d'aide à la synthèse organique, développé au LIRMM depuis 1990, est utilisé comme plate-forme d'expérimentation par l'ensemble du GDR. Dans le cadre d'un contrat cofinancé par SANOFI Chimie et la région Languedoc-Roussillon (pôle TIIM), nous avons développé en Java une nouvelle version de la plate-forme RESYN. Ce travail, principalement réalisé par P. Jambaud, a consisté à intégrer les algorithmes issus de nos derniers travaux de recherche dans un nouveau prototype pouvant être utilisé par les chimistes de SANOFI. Une partie de ces travaux devrait être poursuivie et valorisée par une collaboration avec SANOFI et KLEE (société de services en informatique).
Perspectives
Nos perspectives s'inscrivent toujours dans la modélisation, l'organisation et le traitement de connaissances chimiques, essentiellement représentées par des graphes moléculaires. Du point de vue de la modélisation, il faut étendre nos modèles de représentation des molécules à des connaissances plus complexes comme les transformations chimiques, contextes réactionnels, ... Nous allons poursuivre nos travaux sur le raisonnement par classification sur des hiérarchies de graphes moléculaires, la mise en œuvre d'une classification approchée restant un axe de recherche prioritaire. Par ailleurs, l'analyse des bases de données chimiques existantes fait apparaître de nombreux manques et défauts qu'il s'agisse d'en extraire des connaissances ou d'y stocker des hiérarchies de graphes. Un de nos prochains thèmes est d'étudier de nouveaux types de bases de données, en particulier des bases de graphes moléculaires. Ce thème devrait faire l'objet d'une nouvelle thèse.
168

Services Communs
Service technique et informatiqueResponsable : Michel Chirouze
Service administratifResponsable : Anne Bancel
LogistiqueResponsable : Emile Praud
Rapport d’activité du LIRMM 1998-2001

Service technique et informatique (au 31.12.01)
Personnels du service
IATOS M.E.S.R.
Amadou Pierre IGR2 Chirouze Michel IGR1 Dandonneau Jean-Marie IGR1 Lepinay Pascal IGR2 Maïzi Joël IGE2
ITA CNRS
Benoit Michel IR1 Brunel Thibault IE2 Gil Thierry IE Jacquot Michel IR2 Lorival Régis IE2 Oms Jean Luc IR2 Pinna Denis TCS Prouha Patrice TCN Tilloy Philippe TCE Tuchming Catherine TCN Durant l'année écoulée, le Service Technique et Informatique (S.T.I.) a poursuivi les missions qui lui ont été confiées en informatique, en électronique et micro-informatique ainsi qu'en instrumentation. G. Gachelin a quitté le laboratoire en juillet 2000 pour l'Université de la Réunion et a été remplacé par J-L. Oms (permutation de postes). Les domaines d'activité du service sont de natures très diverses. On peut toutefois en retenir les principales :
• La gestion des moyens techniques du laboratoire,
• La participation à la recherche et à sa valorisation,
• La participation à la formation,
• La participation à des missions particulières.
171
Moyens techniques
Informatique
Le S.T.I. a la responsabilité de l'administration de plusieurs réseaux informatiques géographiquement séparés. Ceci tient aux différents statuts du personnel du service.
• Les Réseaux - Travaux de : P. Amadou, M. Chirouze, G. Gachelin, M. Jacquot, J. Maizi, C. Tuchming Il s’agit de réseaux de machines situés sur le campus de l'Université de Montpellier II (ISIM et UFR en enseignement) et au laboratoire. Ils nécessitent une gestion spécifique et ont fait l'objet chacun d'améliorations liées à leur finalité. S'agissant en particulier du réseau du laboratoire, il a été complété durant l'année pour répondre à des besoins accrus en capacité de connexion et de débit dans les halls techniques. Tous les postes de travail bénéficient de la commutation 10/100 Mbps.
• Parc UNIX - Travaux de : P. Amadou, G. Gachelin, M. Jacquot, J. Maizi, C. Tuchming
Au LIRMM uniquement, le parc de machines connectées actuellement représente environ 150 postes de travail. Par ailleurs, la puissance des serveurs départementaux ou généraux, leur nombre et les OS utilisés se sont sensiblement accrus. Pour les autres institutions mentionnées plus haut, le parc représente environ 100 machines.
• Parc NT - Travaux de : M. Jacquot, Ph. Tilloy La croissance de ce parc reste forte même si son taux s'est ralenti. Il compte désormais environ 150 stations au laboratoire. La mise en œuvre de ce réseau aux OS multiples (Win 96/96, NT4, Win2000) exige un effort de formation permanent de la part des personnes qui en assurent la gestion. Cette compétence est également mise à profit pour la gestion du parc de l'ISIM, environ 100 machines.
• Divers - Travaux de : D. Pinna, P. Prouha, Ph. Tilloy Chargé de la protection du parc de PC contre les virus (D. Pinna) Entretien du parc des imprimantes (environ 40) (P. Prouha) Gestion de l'autocommutateur (P. Tilloy)
Micro-informatique et électronique
Travaux de : M. Benoit, T. Gil, D. Pinna Le STI utilise des moyens modernes pour la conception et la réalisation de cartes électroniques complexes (jusqu'à 10 couches) utilisées dans le cadre de plusieurs projets de recherche :
• ORCAD pour l'implantation et le routage
• LATTICE pour la conception de circuits programmables (CPLD)
Instrumentation
Travaux de : M. P. Amadou, R. Lorival Le STI apporte son concours pour la mise à disposition d'un testeur de composants HEWLETT PACKARD à l'ensemble des utilisateurs du CNFM (Centre National de Formation à la Micro-électronique) de divers établissements de formation de l'hexagone.
172

Participation aux recherches
Outre les tâches d'intérêt général, les membres du S.T.I. interviennent directement dans certains projets de recherche des départements.
Département de Micro-électronique :
Travaux de : J.M. Dandonneau, T. Gil Le STI gère deux plates-formes de prototypage à base de FPGA pour la simulation de circuits électroniques complexes. Elle est utilisée dans le cadre de travaux de recherche et de contrats.
Département de Robotique :
Travaux de : M. Benoit, T. Gil, D. Pinna Ce groupe a conçu une nouvelle commande du robot mobile omnidirectionnel, développée sur PC, modifié la structure mécanique, réalisé la carte de commande (bus PCI) et implanté le logiciel de commande . Il a également conçu et réalisé la carte de commande du nouveau robot parallèle 4 axes "H4". Travaux de : P. Lepinay P. Lepinay a travaillé dans le cadre du projet Cybervision (projet "jeune équipe") qui a pour objectifs l'étude et la réalisation de systèmes de vision intégrés pour la commande de machines autonomes évoluant en environnement inconnu. Il est cosignataire des trois publications auxquelles ces travaux ont donné lieu.
Département d'Informatique Fondamentale et Appliquée :
Travaux de : T. Brunel T. Brunel a développé une plate-forme pour la réorganisation de hiérarchies de classes écrites dans différents langages orientés objets (Java, C ou C++, SmallTalk). Les classes se présentent sous la forme soit de fichiers sources soit de fichiers compilés. Le principe consiste à créer, à partir de ces fichiers, un ensemble d'instances d'un modèle de représentation mis au point par les membres de l'équipe du LIRMM. Ce modèle permet l'utilisation d'un ensemble d'outils (surtout d'algorithmes) pour la réorganisation des hiérarchies de classes. Ce travail est effectué dans le cadre d'une collaboration entre le CNET et une équipe du LIRMM (département ARC).
Participation a la formation
Travaux de : M. P. Amadou, M. Benoit, M. Chirouze, J.M. Dandonneau, T. Gil, P. Lepinay, R. Lorival, J. Maizi, T. Brunel Le S.T.I. participe à la formation dans plusieurs cadres, parfois simultanément :
• celui des IUP, Licence, Maîtrise, DEA et DESS d'Informatique,
• celui de l'ISIM, avec le suivi d'avant-projets en micro-électronique et robotique,
173

• celui du Comité National de Formation à la Micro-électronique (CNFM) avec la diffusion de logiciels de CAO en micro-électronique (CAML) et la gestion du testeur de composants (CRTC).
• Ainsi, le LIRMM diffuse dans de nombreux centres les logiciels suivants (plus de 1300 licences CADENCE, MENTOR, XILINX, SILVACO, ...).
Missions particulières
Certaines personnes du S.T.I. exercent des missions particulières :
• T. Gil est correspondant pour la formation permanente du CNRS,
• Ph. Tilloy est nommé ACMO (Agent Chargé de la Mise en Œuvre de l'hygiène et de la sécurité) au LIRMM,
• M. Jacquot est correspondant du CNRS pour la sécurité informatique du site,
• M. Chirouze, J. Maizi sont membres de la commission "Informatique Recherche" de l'Université de Montpellier II,
• P. Amadou, M. Chirouze et J.L. Oms sont experts auprès de la Région LR pour l'examen technique des dossiers de recherche,
• M. Chirouze participe au groupe pilote du réseau à haut débit HDMON (Haut Débit Montpellier Nord).
174
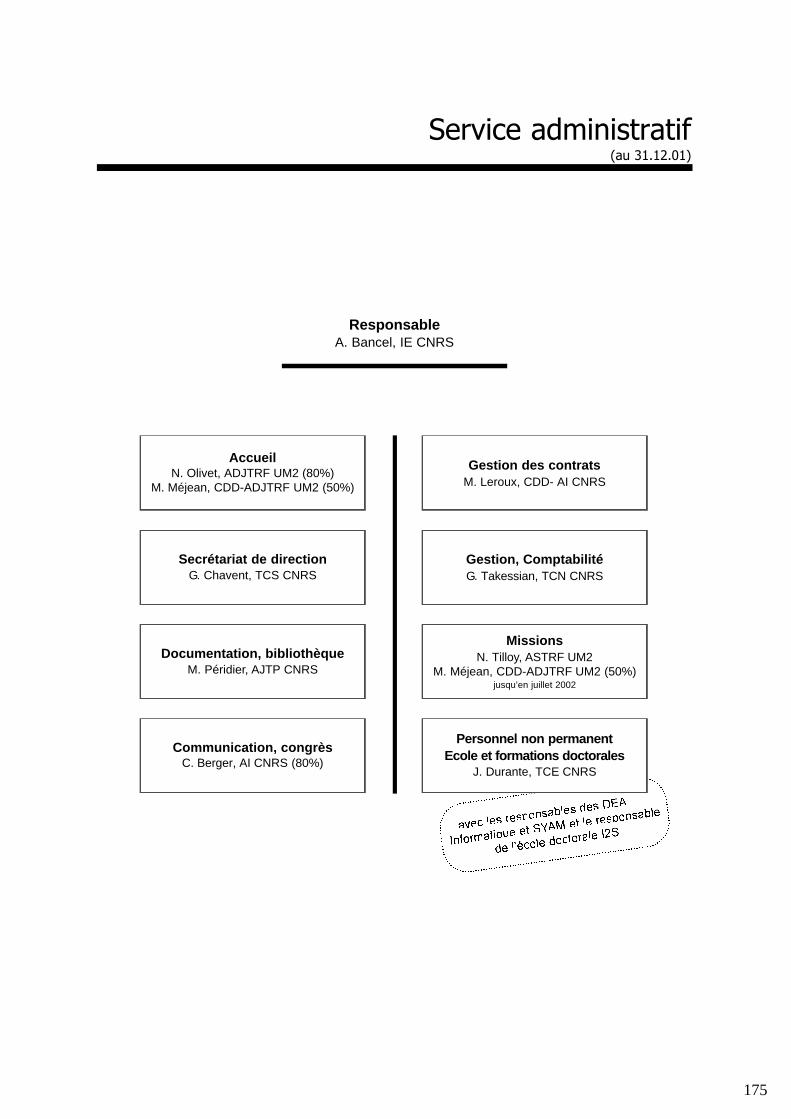
ResponsableA. Bancel, IE CNRS
AccueilN. Olivet, ADJTRF UM2 (80%)
M. Méjean, CDD-ADJTRF UM2 (50%)
Documentation, bibliothèqueM. Péridier, AJTP CNRS
MissionsN. Tilloy, ASTRF UM2
M. Méjean, CDD-ADJTRF UM2 (50%)jusqu’en juillet 2002
Personnel non permanentEcole et formations doctorales
J. Durante, TCE CNRS
Gestion des contratsM. Leroux, CDD- AI CNRS
Gestion, ComptabilitéG. Takessian, TCN CNRS
Communication, congrès C. Berger, AI CNRS (80%)
Secrétariat de directionG. Chavent, TCS CNRS
Service administratif(au 31.12.01)
175


ResponsableE. Praud, IR CNRS
Maintenance, EntretienP. Prouha, TCN CNRS
Maintenance, Espaces vertsC. Montagna, AJT CNRS
(mai 2002)
Service logistique(au 31.12.01)
177

Partenariat, valorisation et animation de la recherche
Animation scientifique internationaleAnimation scientifique nationaleAnimation scientifique régionale
Programmes européens et internationauxRecherches sur contrats d’état
Recherches sur contrats industrielsRecherches avec d’autres organismes
Actions régionalesRelations internationales
Conférences invitéesInvités étrangers
Diffusion de la culture scientifique
Rapport d’activité du LIRMM 1998-2001


Par
tici
pat
ion
à l
'an
imat
ion
sci
enti
fiq
ue
inte
rnat
ion
ale
Dp
tFo
nct
ion
Org
anis
me
Qu
iD
ébu
tFi
n
ARC
Prés
iden
t du
com
ité d
e pr
ogra
mm
eC
erri
SA20
00AR
CM
embr
es d
u co
mité
de
prog
ram
me
Hér
in D
, Nan
ard
M,
Salla
ntin
J20
00
ARC
Mem
bre
du c
omité
de
prog
ram
me
AAAI
'99
Wor
ksho
p on
Age
nts
Con
flict
sQ
uinq
ueto
n J
1999
ARC
Mem
bre
du c
omité
d'é
valu
atio
nAC
M C
HI'0
1N
anar
d J
ARC
Mem
bre
du c
omité
d'é
valu
atio
nAC
M C
HI'9
9 (C
ompu
ter H
uman
Inte
ract
ion)
Nan
ard
J19
99AR
CM
embr
e du
com
ité d
'éva
luat
ion
ACM
Hyp
erte
xtN
anar
d J
1999
2001
ARC
Prés
iden
tAC
M S
igw
eb "S
peci
al In
tere
st G
roup
on
Hyp
erte
xt a
nd W
eb"
Nan
ard
M19
9920
00AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eAI
-ed'
99H
érin
D19
99AR
CM
embr
e de
l'Edi
toria
l boa
rdAp
plie
d Ar
tific
ial I
ntel
ligen
ceC
erri
SA20
0020
01AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eAT
AL' 9
9Fe
rber
J19
99AR
CM
embr
es d
u co
mité
de
prog
ram
me
CAP
'99
Liqu
ière
M, S
alla
ntin
J19
99AR
CPr
ésid
ente
du
com
ité d
e pr
ogra
mm
eC
ASSI
NI 2
001
Libo
urel
T20
01AR
CR
epré
sent
ant d
u pô
le u
nive
rsita
ire d
e M
ontp
ellie
rC
oim
bra
Gro
up o
f Uni
vers
ities
(CEE
)Q
uinq
ueto
n J
2000
ARC
Mem
bre
du c
omité
d'é
valu
atio
nC
OLI
NG
'99
Lafo
urca
de M
1999
ARC
Mem
bre
de l'E
dito
rial b
oard
Com
pute
r Ass
iste
d La
ngua
ge L
earn
ing
Cer
ri SA
2000
2001
ARC
Cré
atio
n et
org
anis
atio
n du
wor
ksho
p - P
rési
dent
e du
com
ité d
e pr
ogra
mm
eD
ata
Inte
grat
ion
over
the
Web
, DIW
eb'0
1Be
llahs
ène
Z20
01
ARC
Mem
bre
du c
omité
d'é
valu
atio
nD
ocIn
g'01
Nan
ard
JAR
CM
embr
e du
com
ité d
e pr
ogra
mm
eEC
DL
'99
Euro
pean
Con
fere
nce
on D
igita
l Lib
rarie
sN
anar
d M
1999
ARC
Mem
bre
du c
omité
de
prog
ram
me
Euro
pean
Sym
posi
um o
n "T
elem
atic
s, H
yper
med
ia a
nd A
rtific
ial
Inte
lligen
ce in
Edu
catio
n an
d Tr
aini
ng fo
r the
New
Pro
fess
ions
in th
e In
form
atio
n So
ciet
y"
Hér
in D
1999
ARC
Mem
bre
du c
omité
d'é
valu
atio
nH
ICC
S '9
9 Tr
ack
Hyp
erm
edia
Nan
ard
J19
99AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eH
T2PM
'99
Nan
ard
M19
99AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eH
yper
med
ia e
t app
rent
issa
ge '9
9N
anar
d M
1999
ARC
Mem
bre
du c
omité
de
prog
ram
me
ICEI
SLi
bour
el T
1999
2001
ARC
Mem
bre
du c
omité
d'é
valu
atio
nIF
IP E
HC
I'01
Nan
ard
JAR
CM
embr
e ob
serv
ateu
rFe
rber
J20
00AR
CM
embr
e ob
serv
ateu
rN
anar
d J
1999
ARC
Mem
bre
du c
omité
d'é
valu
atio
nIH
M-H
CI'0
1N
anar
d J
ARC
Mem
bre
du c
omité
de
prog
ram
me
et d
e l'A
dvis
ory
Boar
dIn
t'l C
onfe
renc
e on
Mul
ti-Ag
ents
Sys
tem
sFe
rber
J19
99AR
CM
embr
e de
l' "E
dito
rial B
oard
"In
t'l Jo
urna
l of A
uton
omou
s Ag
ents
and
Mul
ti-Ag
ent S
yste
ms
Ferb
er J
1999
ARC
Prés
iden
t du
Com
ité d
e Pr
ogra
mm
e et
Mem
bre
du S
teer
ing
Com
mitt
eeC
erri
SA20
00
ARC
Mem
bre
du c
omité
de
prog
ram
me
Joab
M20
00AR
CPr
ésid
ent d
u co
mité
de
prog
ram
me
ITS
2002
: In
tellig
ent T
utor
ing
Syst
ems
Cer
ri SA
2002
ARC
Mem
bre
du c
omité
de
prog
ram
me
ITS
Inte
lligen
t Tut
orin
g Sy
stem
Hér
in D
1998
2002
ARC
Mem
bre
du c
omité
de
prog
ram
me
Don
y C
2002
ARC
Mem
bre
du c
omité
de
prog
ram
me
Libo
urel
T19
9920
02AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eM
AAM
AW '
99Fe
rber
J19
99AR
CFe
rber
J20
00AR
CFe
rrié
J 19
9820
01M
embr
e de
l’ “I
nter
natio
nal A
dvis
ory
Com
mitt
ee “
9th
Int.
Con
f. O
n Ar
tific
ial I
ntel
ligen
ce M
etho
dolo
gy, S
yste
ms
and
Appl
icat
ions
AIM
SA 2
000
IFIP
WG
2.7
ITS
2000
LMO
: La
ngag
es e
t Mod
èles
à O
bjet
Net
wor
king
and
Info
rmat
ion
Syst
ems
Jour
nal
181

Dp
tFo
nct
ion
Org
anis
me
Qu
iD
ébu
tFi
n
ARC
Mem
bre
du c
omité
de
réda
ctio
nN
RH
M N
ew R
evie
w o
f Hyp
erm
edia
and
Mul
timed
iaN
anar
d M
1999
ARC
Mem
bre
du c
omité
de
prog
ram
me
Obj
ect-O
rient
ed In
form
atio
n Sy
stem
s, O
OIS
'200
1Be
llahs
ène
Z20
01AR
CM
embr
e du
com
ité d
e ré
dact
ion
Rev
ue in
tern
atio
nale
de
géom
atiq
ueLi
bour
el T
1999
2000
Mem
bre
du c
omité
de
prog
ram
me
et O
rgan
isat
ion
d'un
e se
ssio
n in
vitée
2000
Mem
bre
du c
omité
de
prog
ram
me
2001
ARC
Prés
iden
t de
sess
ion
Socr
ates
IP -
Sym
posi
um &
Sum
er -
Vare
se 1
999
Hér
in D
1999
ARC
Mem
bre
du c
omité
de
prog
ram
me
VLD
B'99
: 25
th In
t. C
onf.
On
Very
Lar
ge D
ata
Base
Ferri
é J
1999
ARC
Prés
iden
t du
com
ité d
e pr
ogra
mm
eC
erri
SA20
00AR
CM
embr
es d
u co
mité
de
prog
ram
me
Hér
in D
, Nan
ard
M,
Ponc
elet
P, S
ala
M,
Salla
ntin
J, T
eiss
iere
M
2000
ARC
Co-
orga
nisa
teur
et m
embr
e du
com
ité d
e pr
ogra
mm
eW
orks
hop
"Hyp
erm
edia
Dev
elop
men
t '99
"N
anar
d J
1999
ARC
Mem
bre
du c
omité
d'é
valu
atio
nW
WW
8 8
th C
onf.
On
Wor
ld W
ide
Web
Nan
ard
M19
99IF
AM
embr
e du
com
ité d
e pr
ogra
mm
e d
u w
orks
hop
: Non
-bin
ary
co
nstra
ints
IJC
AI'9
9Be
ssiè
re C
h19
99
IFA
Org
anis
ateu
r du
wor
ksho
p :
Mod
ellin
g an
d so
lvin
g pr
oble
ms
with
co
nstra
ints
et
Co-
orga
nisa
teur
du
wor
ksho
p :
Dis
tribu
ted
Con
stra
int
Rea
soni
ng
IJC
AI'0
1Be
ssiè
re C
h20
01
IFA
Mem
bre
du c
omité
d'o
rgan
isat
ion
"Doc
tora
l pro
gram
me'
' à C
P'01
Bess
ière
Ch
2001
IFA
Mem
bre
du c
omité
de
prog
ram
me
ACM
-SIA
M S
OD
A '9
9H
abib
M19
99IF
AEd
iteur
Dis
cret
e m
aths
and
theo
retic
al c
ompu
ter s
cien
ces
(DM
TCS)
Hab
ib M
1998
2001
IFA
Mem
bre
du c
omité
de
prog
ram
me
ARIT
H14
199
9Ba
jard
JC
1999
ARIT
H15
200
1Ba
jard
JC
2001
IFA
Mem
bre
du c
omité
de
prog
ram
me
ASIA
N 2
000
Je
an-M
arie
A20
00IF
AM
embr
e de
l'Edi
toria
l boa
rdBi
olex
is (r
evue
éle
ctro
niqu
e de
bio
logi
e)
Gas
cuel
O19
9920
00IF
AC
o-or
gani
sate
urC
P’00
wor
ksho
p on
Dis
tribu
ted
reas
onin
gBe
ssiè
re C
h20
00IF
AC
o-or
gani
sate
ur d
u w
orks
hop
: Dis
tribu
ted
Con
stra
int S
atis
fact
ion
CP'
00Be
ssiè
re C
h20
00IF
AM
embr
e du
com
ité d
e pr
ogra
mm
eC
P'98
et C
P'01
Bess
ière
Ch
1998
IFA
Mem
bre
du c
omité
de
prog
ram
me
CP-
AI-O
R’0
0Be
ssiè
re C
h20
00IF
AM
embr
e du
com
ité d
e pr
ogra
mm
eC
P-AI
-OR
'00
Bess
ière
Ch
2000
IFA
Mem
bre
du c
omité
de
prog
ram
me
Fior
io C
1999
2001
IFA
Mem
bre
du c
omité
de
pilo
tage
Ahro
novi
tz E
1998
2001
IFA
Co-
orga
nisa
teur
ECAI
’00
Bess
ière
Ch
2000
IFA
Co-
orga
nisa
teur
du
wor
ksho
p :
Mod
ellin
g an
d so
lvin
g pr
oble
ms
with
EC
AI'0
0Be
ssiè
re C
h20
00IF
APr
ésid
ent d
e do
mai
ne d
ans
le c
omité
de
prog
ram
me
et M
embr
e du
co
mité
de
prog
ram
me
du w
orks
hop
: Non
-bin
ary
cons
train
tsBe
ssiè
re C
h19
98
IFA
Mac
hine
Lea
rnin
g C
hairm
an
Gas
cuel
O19
98IF
AM
embr
e du
com
ité d
e pr
ogra
mm
eEu
rope
an C
onfe
renc
e on
Mac
hine
Lea
rnin
gG
ascu
el O
2000
IFA
Mem
bre
du c
omité
de
prog
ram
me
Gra
ph-T
heor
etic
Con
cept
s in
Com
pute
r Sci
ence
Hab
ib M
1998
2001
IFA
Mem
bre
du c
omité
de
prog
ram
me
Sym
posi
um o
n th
eore
tical
asp
ects
of c
ompu
ter s
cien
ce, S
TAC
S'00
Hab
ib M
2000
IFA
Mem
bres
du
com
ité é
dito
rial
Mug
nier
ML,
Che
in M
1999
IFA
Mem
bre
du c
omité
de
prog
arm
me
Hab
ib M
1999
2001
IFA
Prés
iden
t du
com
ité d
e pr
ogra
mm
eH
abib
M19
99IF
AM
embr
e du
com
ité d
e pr
ogra
mm
eN
ourin
e L
1999
Ord
ers
& Al
gorit
hms
OR
DAL
'99
DG
CI
Euro
pean
Con
fere
nce
on A
rtific
ial I
ntel
ligen
ce (E
CAI
'98)
ARC
WIT
REC
200
0
Bella
hsèn
e Z
SCI
Inte
rnat
iona
l Con
fere
nce
on C
once
ptua
l Sys
tem
s IC
CS
'99
182
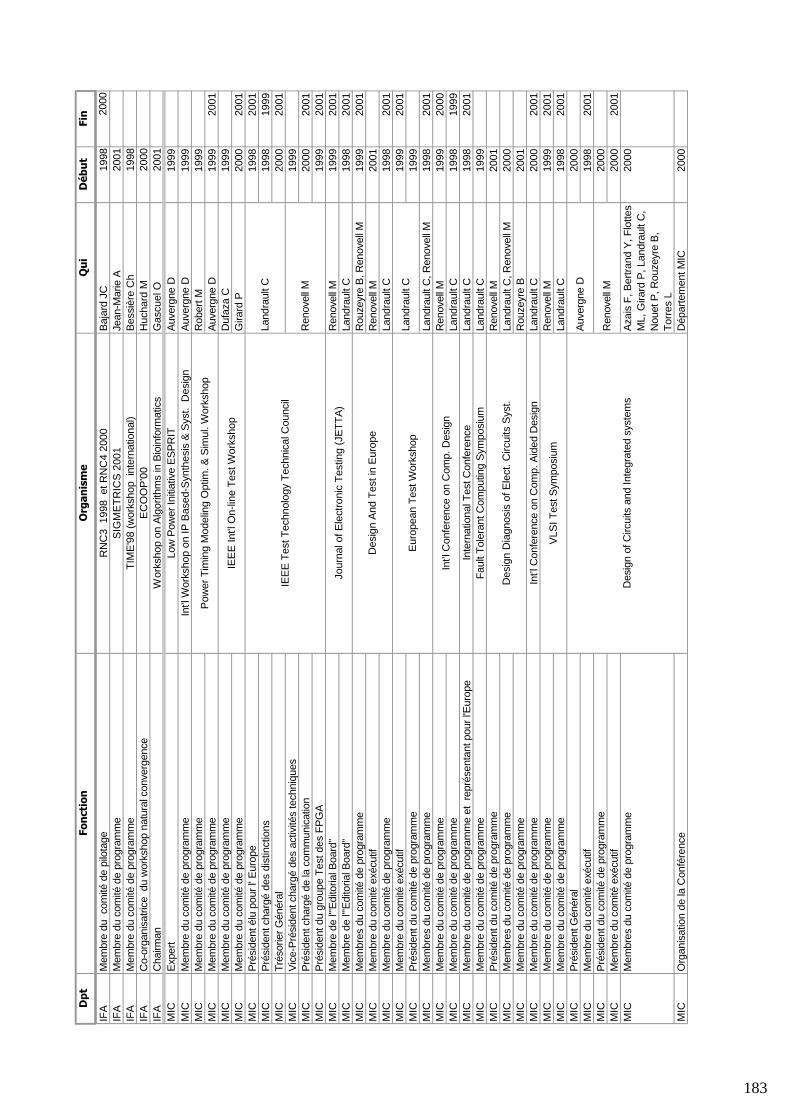
Dp
tFo
nct
ion
Org
anis
me
Qu
iD
ébu
tFi
n
IFA
Mem
bre
du c
omité
de
pilo
tage
RN
C3
199
8 e
t RN
C4
2000
Baja
rd J
C
1998
2000
IFA
Mem
bre
du c
omité
de
prog
ram
me
SIG
MET
RIC
S 20
01Je
an-M
arie
A20
01IF
AM
embr
e du
com
ité d
e pr
ogra
mm
eTI
ME'
98 (w
orks
hop
inte
rnat
iona
l)Be
ssiè
re C
h19
98IF
AC
o-or
gani
satri
ce d
u w
orks
hop
natu
ral c
onve
rgen
ce
ECO
OP'
00H
ucha
rd M
2000
IFA
Cha
irman
Wor
ksho
p on
Alg
orith
ms
in B
ioin
form
atic
s G
ascu
el O
2001
MIC
Expe
rtLo
w P
ower
Initia
tive
ESPR
ITAu
verg
ne D
1999
MIC
Mem
bre
du c
omité
de
prog
ram
me
Int'l
Wor
ksho
p on
IP B
ased
-Syn
thes
is &
Sys
t. D
esig
n Au
verg
ne D
1999
MIC
Mem
bre
du c
omité
de
prog
ram
me
Rob
ert M
1999
MIC
Mem
bre
du c
omité
de
prog
ram
me
Auve
rgne
D19
9920
01M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eD
ufaz
a C
1999
MIC
Mem
bre
du c
omité
de
prog
ram
me
Gira
rd P
2000
2001
MIC
Prés
iden
t élu
pou
r l' E
urop
e19
9820
01M
ICPr
ésid
ent c
harg
é de
s di
stin
ctio
ns19
9819
99M
ICTr
ésor
ier G
énér
al20
0020
01M
ICVi
ce-P
rési
dent
cha
rgé
des
activ
ités
tech
niqu
es19
99M
ICPr
ésid
ent c
harg
é de
la c
omm
unic
atio
n20
0020
01M
ICPr
ésid
ent d
u gr
oupe
Tes
t des
FPG
A19
9920
01M
ICM
embr
e de
l'"Ed
itoria
l Boa
rd"
Ren
ovel
l M19
9920
01M
ICM
embr
e de
l'"Ed
itoria
l Boa
rd"
Land
raul
t C19
9820
01M
ICM
embr
es d
u co
mité
de
prog
ram
me
Rou
zeyr
e B,
Ren
ovel
l M19
9920
01M
ICM
embr
e du
com
ité e
xécu
tifR
enov
ell M
2001
MIC
Mem
bre
du c
omité
de
prog
ram
me
Land
raul
t C19
9820
01M
ICM
embr
e du
com
ité e
xécu
tif19
9920
01M
ICPr
ésid
ent d
u co
mité
de
prog
ram
me
1999
MIC
Mem
bres
du
com
ité d
e pr
ogra
mm
eLa
ndra
ult C
, Ren
ovel
l M19
9820
01M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eR
enov
ell M
1999
2000
MIC
Mem
bre
du c
omité
de
prog
ram
me
Land
raul
t C19
9819
99M
ICM
embr
e du
com
ité d
e pr
ogra
mm
e et
rep
rése
ntan
t pou
r l'E
urop
eIn
tern
atio
nal T
est C
onfe
renc
eLa
ndra
ult C
1998
2001
MIC
Mem
bre
du c
omité
de
prog
ram
me
Faul
t Tol
eran
t Com
putin
g Sy
mpo
sium
Land
raul
t C19
99M
ICPr
ésid
ent d
u co
mité
de
prog
ram
me
Ren
ovel
l M20
01M
ICM
embr
es d
u co
mité
de
prog
ram
me
Land
raul
t C, R
enov
ell M
2000
MIC
Mem
bre
du c
omité
de
prog
ram
me
Rou
zeyr
e B
2001
MIC
Mem
bre
du c
omité
de
prog
ram
me
Int’l
Con
fere
nce
on C
omp.
Aid
ed D
esig
nLa
ndra
ult C
2000
2001
MIC
Mem
bre
du c
omité
de
prog
ram
me
Ren
ovel
l M19
9920
01M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eLa
ndra
ult C
1998
2001
MIC
Prés
iden
t Gén
éral
2000
MIC
Mem
bre
du c
omité
exé
cutif
1998
2001
MIC
Prés
iden
t du
com
ité d
e pr
ogra
mm
e20
00M
ICM
embr
e du
com
ité e
xécu
tif20
0020
01M
ICM
embr
es d
u co
mité
de
prog
ram
me
Azai
s F,
Ber
trand
Y, F
lotte
s M
L, G
irard
P, L
andr
ault
C,
Nou
et P
, Rou
zeyr
e B,
To
rres
L
2000
MIC
Org
anis
atio
n de
la C
onfé
renc
eD
épar
tem
ent M
IC20
00
Land
raul
t C
Des
ign
Dia
gnos
is o
f Ele
ct. C
ircui
ts S
yst.
Pow
er T
imin
g M
odel
ing
Opt
im. &
Sim
ul. W
orks
hop
IEEE
Int'l
On-
line
Test
Wor
ksho
p
Int’l
Con
fere
nce
on C
omp.
Des
ign
IEEE
Tes
t Tec
hnol
ogy
Tech
nica
l Cou
ncil
Jour
nal o
f Ele
ctro
nic
Test
ing
(JET
TA)
Des
ign
And
Test
in E
urop
e
Land
raul
t C
Ren
ovel
l M
Auve
rgne
D
Ren
ovel
l M
VLSI
Tes
t Sym
posi
um
Euro
pean
Tes
t Wor
ksho
p
Des
ign
of C
ircui
ts a
nd In
tegr
ated
sys
tem
s
183

Dp
tFo
nct
ion
Org
anis
me
Qu
iD
ébu
tFi
n
MIC
Mem
bre
du c
omité
de
prog
ram
me
1998
2001
MIC
Prés
iden
t du
com
ité d
e pr
ogra
mm
e19
99M
ICPr
ésid
ent G
énér
al20
00M
ICM
embr
e du
com
ité e
xécu
tif20
0020
01M
ICO
rgan
isat
ion
de la
Con
fére
nce
Dép
arte
men
t MIC
2000
MIC
Mem
bre
du c
omité
de
prog
ram
me
Ren
ovel
l M19
9920
01M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eR
ober
t M20
00M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eTe
stin
g Em
bedd
ed C
ore-
base
d Sy
stem
-chi
ps W
orks
hop
Ren
ovel
l M19
9920
01M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eLa
tin A
mer
ican
Tes
t Wor
ksho
pR
enov
ell M
2000
2001
MIC
Mem
bre
du c
omité
de
prog
ram
me
Rob
ert M
1999
MIC
Prés
iden
t Gén
éral
Rob
ert M
2001
MIC
Prés
iden
t du
com
ité d
e pr
ogra
mm
eR
ouze
yre
B20
01M
ICPr
ésid
ente
du
com
ité d
'org
anis
atio
nFl
otte
s M
L20
01M
ICM
embr
es d
u co
mité
de
prog
ram
me
Flot
tes
ML,
Aze
mar
d N
, G
irard
P, N
ouet
P20
01
MIC
Org
anis
atio
n de
la C
onfé
renc
eD
épar
tem
ent M
IC20
01M
ICM
embr
eIF
IPR
ober
t M20
00M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eEU
RO
MIC
RO
Dig
ital S
yste
m D
esig
n W
orks
hop
Rou
zeyr
e B
1999
2001
MIC
Mem
bre
du c
omité
de
prog
ram
me
Hig
h Le
vel D
esig
n, V
erifi
catio
n an
d Te
st W
orks
hop
Rou
zeyr
e B
1999
2000
MIC
Mem
bre
du c
omité
de
prog
ram
me
Mul
tiArc
hite
ctur
e an
d Lo
w P
ower
Des
ign
Wor
ksho
pR
ouze
yre
B19
99M
ICM
embr
e du
com
ité d
e pr
ogra
mm
eR
enov
ell M
2001
MIC
Mem
bre
du c
omité
de
prog
ram
me
Land
raul
t C19
98R
OB
Mem
bre
du c
omité
de
prog
ram
me
13th
Eur
opea
n Si
mul
atio
n Sy
mpo
sium
(ESS
'01)
Dom
bre
E20
01R
OB
Mem
bre
du c
omité
de
prog
ram
me
Adva
nces
in R
obot
Kin
emat
ics
(AR
K'98
et A
RK'
00)
Dau
chez
P20
00R
OB
Mem
bre
du c
omité
de
prog
ram
me
AIM
'99
Dom
bre
E19
99R
OB
Mem
bre
du c
omité
inte
rnat
iona
lFE
ATS
Cro
snie
r A20
01R
OB
Mem
bre
du c
omité
de
prog
ram
me
IAR
P Au
tono
mou
s U
nder
wat
er V
ehic
les
for S
hallo
w W
ater
and
C
oast
al E
nviro
nmen
tsD
auch
ez P
1998
RO
BPr
ésid
ent-f
onda
teur
du
chap
itre
"Rob
otic
s an
d Au
tom
atio
n"IE
EE F
ranc
eD
auch
ez P
1999
RO
BM
embr
e du
com
ité d
e pr
ogra
mm
eIE
EE IC
RA'
99 e
t IC
RA'
00D
auch
ez P
2000
RO
BM
embr
e du
com
ité d
e pr
ogra
mm
eIE
EE/R
SJ IR
OS'
98 e
t IEE
E/R
SJ IR
OS'
00D
auch
ez P
2000
RO
BM
embr
es d
u co
mité
tech
niqu
eIn
tern
atio
nal F
eder
atio
n fo
r Aut
omat
ic C
ontro
lD
auch
ez P
, Pie
rrot F
1999
RO
BM
embr
e du
com
ité d
e pr
ogra
mm
eIn
tern
atio
nal S
ympo
sium
on
Inte
lligen
t Aut
omat
ion
and
Con
traol
(W
AK/IS
IAC
'2K)
Dau
chez
P20
00
RO
BM
embr
e du
com
ité d
e pr
ogra
mm
eIn
tern
atio
nal S
ympo
sium
on
Rob
otic
s (IS
R)
Dau
chez
P20
00R
OB
Edite
ur p
our l
'Eur
ope
Int'l
Jour
nal f
or In
tellig
ent A
utom
atio
n an
d So
ft C
ompu
ting
Dau
chez
P19
99R
OB
Edito
rial a
dvis
erIn
t'l Jo
urna
l of A
dvan
ced
Man
ufac
turin
g Te
chno
logy
Liég
eois
A19
99R
OB
Mem
bre
du "B
oard
of A
ssoc
iate
Edi
tors
"In
t'l Jo
urna
l of E
nviro
nmen
tally
Con
scio
us M
anuf
actu
ring
Dau
chez
P19
99R
OB
Mem
bre
du c
omité
de
prog
ram
me
ISAP
T'99
Dom
bre
E19
99R
OB
Mem
bre
du c
omité
de
prog
ram
me
Mod
élis
atio
n de
s Sy
stèm
es R
éact
ifsPr
unet
F19
99R
OB
Mem
bre
du "B
oard
of A
ssoc
iate
Edi
tors
"R
obot
ica
Pier
rot F
1999
Asia
n Te
st S
ympo
sium
VLS
I
Inte
rnat
iona
l Mix
ed-S
igna
l Tes
t Wor
ksho
pR
enov
ell M
Sout
h Br
azilia
n C
onfe
renc
e on
ICs
184

Par
tici
pat
ion
à l'
anim
atio
n s
cien
tifi
qu
e n
atio
nal
e
Dp
tFo
nct
ion
Org
anis
me
Qu
i D
ébu
tFi
nAR
CM
embr
e fo
ndat
eur e
t mem
bre
du c
omité
d'a
dmin
istra
tion
AFIH
M (A
ssoc
. Fra
ncop
hone
pou
r l'In
tera
ctio
n H
omm
e-M
achi
ne)
Nan
ard
J19
9920
00
ARC
Mem
bre
du c
omité
de
prog
ram
me
AIM
200
2H
érin
D20
0020
02AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eAL
CAA
Prin
ce V
2000
ARC
Mem
bre
du c
omité
de
prog
ram
me
BDA'
00Li
bour
el T
2000
ARC
Mem
bres
du
com
ité d
e pr
ogra
mm
eBD
A'99
Bella
hsèn
e Z,
Pon
cele
t P19
99AR
CM
embr
e du
com
ité "M
odèl
es, M
étho
des,
Thé
orie
s" d
u Pr
ogra
mm
e En
viro
nnem
ent
CN
RS
Ferb
er J
1999
ARC
Prés
iden
te d
e la
sec
tion
27Pr
ince
V19
99AR
CM
embr
e él
u de
la s
ectio
n 27
Prin
ce V
2000
ARC
Mem
bre
du c
omité
de
prog
ram
me
CAS
SIN
I'00
Libo
urel
T20
00AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eC
EEM
AS'0
1Q
uinq
ueto
n J
2000
ARC
Mem
bre
du c
omité
de
pilo
tage
du
thèm
e "R
epré
sent
atio
n et
ge
stio
n de
l'IG
"C
EMAG
REF
Libo
urel
T19
9920
00
ARC
Mem
bre
du c
omité
"Mod
èles
, mét
hode
s, th
éorie
s" d
u pr
ogra
mm
e en
viro
nnem
ent
CN
RS
Ferb
er J
2000
ARC
Mem
bre
du C
omité
de
Prog
ram
me
EGC
'200
1H
érin
D20
0120
01AR
CC
o-Pr
ésid
ente
du
Com
ité d
e Pr
ogra
mm
eEG
C'2
002
Hér
in D
2002
2002
ARC
Mem
bre
du c
omité
de
prog
ram
me
Ergo
-IAPr
ince
V20
00AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eER
GO
-IHM
'00
Nan
ard
J20
00AR
CG
roup
e "3
.1 M
odèl
es d
e do
nnée
s et
lang
ages
" Be
llahs
ène
Z19
9920
00AR
CC
o-or
gani
satio
n et
ani
mat
ion
de jo
urné
es d
u G
DR
/PR
C I3
, gr
oupe
3.1
et 3
.2Be
llahs
ène
Z20
01
ARC
Gro
upe
"2 .1
SG
BD a
vanc
és"
Car
t M, F
errié
J19
98AR
CG
roup
e "3
.2 –
Mod
élis
atio
n, c
once
ptio
n et
éva
luat
ion"
Hér
in D
1999
2000
ARC
Gro
upe
"3.1
Mod
èles
de
donn
ées
et la
ngag
es"
Libo
urel
T19
99AR
CG
roup
e "7
.2 A
spec
ts s
patio
-tem
pore
ls"
Libo
urel
T19
99AR
CM
embr
e du
com
ité d
e di
rect
ion
Libo
urel
T20
00AR
CM
embr
e du
com
ité d
e di
rect
ion
Nan
ard
J19
99AR
CG
roup
e "3
.1 M
odèl
es d
e do
nnée
s et
lang
ages
" Po
ncel
et P
, Tei
ssei
re M
1999
ARC
Res
pons
able
du
grou
pe "3
.1.1
– D
ata
min
ing
dans
les
gran
des
base
s de
don
nées
"Po
ncel
et P
1999
2000
ARC
Mem
bre
du c
omité
de
dire
ctio
nD
ony
C19
99AR
CG
roup
e 7.
2 "a
spec
ts s
paci
o-te
mpo
rels
"D
ony
CAR
CG
roup
e "ré
seau
x et
sys
tèm
es"
GD
R A
RP
Ferri
é J
1998
2000
ARC
Mem
bre
du c
omité
de
prog
ram
me
IC '9
9N
anar
d J
1999
ARC
Mem
bre
du c
omité
d'o
rgan
isat
ion
Béta
ille H
1999
ARC
Prés
iden
teN
anar
d J
1999
ARC
Prés
iden
t du
com
ité d
'org
anis
atio
nN
anar
d M
1999
GD
R A
LP
IHM
'99
CN
U
GD
R /
PRC
I3
185
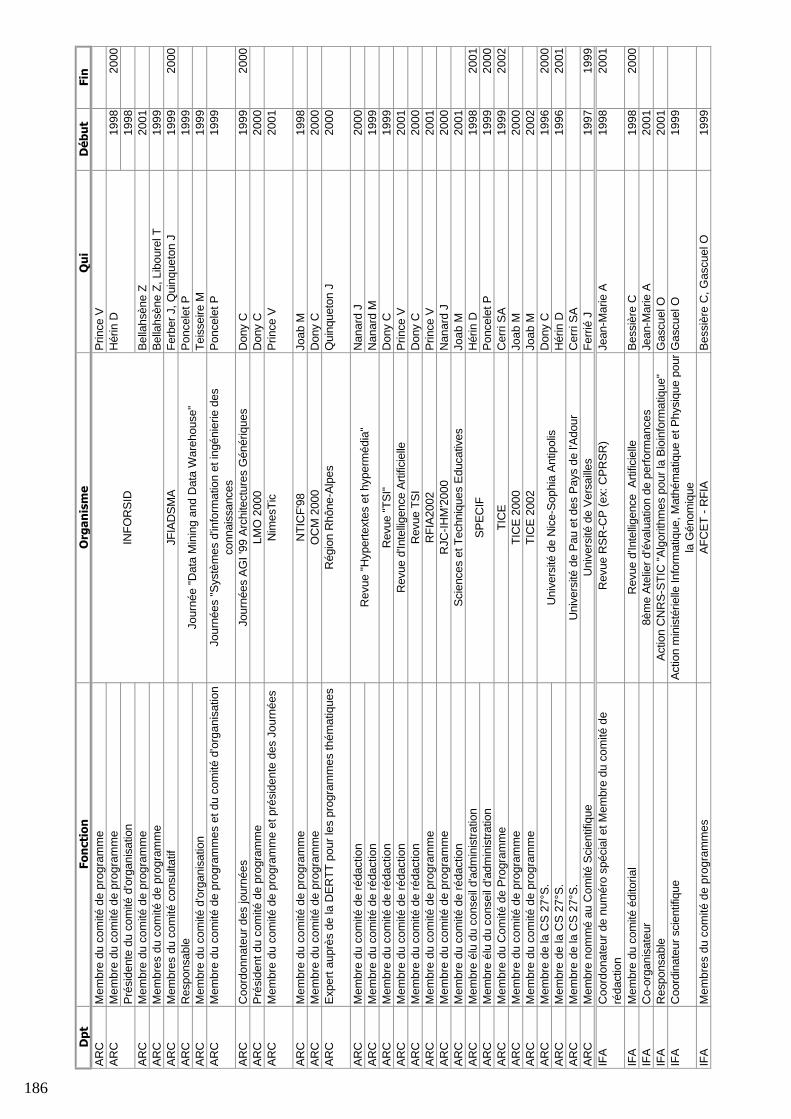
Dp
tFo
nct
ion
Org
anis
me
Qu
i D
ébu
tFi
nAR
CM
embr
e du
com
ité d
e pr
ogra
mm
ePr
ince
VM
embr
e du
com
ité d
e pr
ogra
mm
e19
9820
00Pr
ésid
ente
du
com
ité d
'org
anis
atio
n19
98AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eBe
llahs
ène
Z20
01AR
CM
embr
es d
u co
mité
de
prog
ram
me
Bella
hsèn
e Z,
Lib
oure
l T19
99AR
CM
embr
es d
u co
mité
con
sulta
tifJF
IAD
SMA
Ferb
er J
, Qui
nque
ton
J19
9920
00AR
CR
espo
nsab
lePo
ncel
et P
1999
ARC
Mem
bre
du c
omité
d'o
rgan
isat
ion
Teis
seire
M19
99AR
CM
embr
e du
com
ité d
e pr
ogra
mm
es e
t du
com
ité d
'org
anis
atio
nJo
urné
es "S
ystè
mes
d'in
form
atio
n et
ingé
nier
ie d
es
conn
aiss
ance
sPo
ncel
et P
1999
ARC
Coo
rdon
nate
ur d
es jo
urné
esJo
urné
es A
GI '
99 A
rchi
tect
ures
Gén
ériq
ues
Don
y C
1999
2000
ARC
Prés
iden
t du
com
ité d
e pr
ogra
mm
eLM
O 2
000
Don
y C
2000
ARC
Mem
bre
du c
omité
de
prog
ram
me
et p
rési
dent
e de
s Jo
urné
esN
imes
Tic
Prin
ce V
2001
ARC
Mem
bre
du c
omité
de
prog
ram
me
NTI
CF'
98Jo
ab M
1998
ARC
Mem
bre
du c
omité
de
prog
ram
me
OC
M 2
000
Don
y C
2000
ARC
Expe
rt au
près
de
la D
ERTT
pou
r les
pro
gram
mes
thém
atiq
ues
Rég
ion
Rhô
ne-A
lpes
Qui
nque
ton
J20
00
ARC
Mem
bre
du c
omité
de
réda
ctio
nN
anar
d J
2000
ARC
Mem
bre
du c
omité
de
réda
ctio
nN
anar
d M
1999
ARC
Mem
bre
du c
omité
de
réda
ctio
nR
evue
"TSI
"D
ony
C19
99AR
CM
embr
e du
com
ité d
e ré
dact
ion
Rev
ue d
'Inte
lligen
ce A
rtific
ielle
Prin
ce V
2001
ARC
Mem
bre
du c
omité
de
réda
ctio
nR
evue
TSI
Don
y C
2000
ARC
Mem
bre
du c
omité
de
prog
ram
me
RFI
A200
2Pr
ince
V20
01AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eR
JC-IH
M'2
000
Nan
ard
J20
00AR
CM
embr
e du
com
ité d
e ré
dact
ion
Scie
nces
et T
echn
ique
s Ed
ucat
ives
Joab
M20
01AR
CM
embr
e él
u du
con
seil
d'ad
min
istra
tion
Hér
in D
1998
2001
ARC
Mem
bre
élu
du c
onse
il d'
adm
inis
tratio
nPo
ncel
et P
1999
2000
ARC
Mem
bre
du C
omité
de
Prog
ram
me
TIC
E C
erri
SA19
9920
02AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eTI
CE
2000
Joab
M20
00AR
CM
embr
e du
com
ité d
e pr
ogra
mm
eTI
CE
2002
Joab
M20
02AR
CM
embr
e de
la C
S 27
°S.
Don
y C
1996
2000
ARC
Mem
bre
de la
CS
27°S
.H
érin
D19
9620
01AR
CM
embr
e de
la C
S 27
°S.
Uni
vers
ité d
e Pa
u et
des
Pay
s de
l'Ado
urC
erri
SAAR
CM
embr
e no
mm
é au
Com
ité S
cien
tifiq
ueU
nive
rsité
de
Vers
aille
sFe
rrié
J19
9719
99IF
AC
oord
onat
eur d
e nu
mér
o sp
écia
l et M
embr
e du
com
ité d
e ré
dact
ion
Rev
ue R
SR-C
P (e
x: C
PRSR
)Je
an-M
arie
A
1998
2001
IFA
Mem
bre
du c
omité
édi
toria
l R
evue
d'In
tellig
ence
Arti
ficie
lle
Bess
ière
C19
9820
00IF
AC
o-or
gani
sate
ur
8èm
e At
elie
r d'é
valu
atio
n de
per
form
ance
sJe
an-M
arie
A
2001
IFA
Res
pons
able
Actio
n C
NR
S-ST
IC "A
lgor
ithm
es p
our l
a Bi
oinf
orm
atiq
ue"
Gas
cuel
O20
01IF
AC
oord
inat
eur s
cien
tifiq
ueAc
tion
min
isté
rielle
Info
rmat
ique
, Mat
hém
atiq
ue e
t Phy
siqu
e po
ur
la G
énom
ique
Gas
cuel
O19
99
IFA
Mem
bres
du
com
ité d
e pr
ogra
mm
esAF
CET
- R
FIA
Bess
ière
C, G
ascu
el O
1999
Hér
in D
INFO
RSI
DAR
C
SPEC
IF
Uni
vers
ité d
e N
ice-
Soph
ia A
ntip
olis
Jour
née
"Dat
a M
inin
g an
d D
ata
War
ehou
se"
Rev
ue "H
yper
text
es e
t hyp
erm
édia
"
186

Dp
tFo
nct
ion
Org
anis
me
Qu
i D
ébu
tFi
nIF
AC
o-pi
lote
AS S
TIC
du
CN
RS
Visu
alis
atio
n d'
info
rmat
ion
Mel
anço
n G
2001
IFA
Mem
bre
élu
du c
omité
nat
iona
l, se
ctio
n 07
CN
RS
Hab
ib M
1999
2000
IFA
Mem
bre
élu
de la
sec
tion
27C
NU
Koni
g J.
C19
9920
00IF
AC
omité
de
pilo
tage
de
LMO
Duc
ourn
au R
1999
2001
IFA
Com
ité d
e pr
ogra
mm
e de
LM
O'2
001
Duc
ourn
au R
2001
2001
IFA
Prés
iden
t du
com
ite d
e pr
ogra
mm
eC
ongr
ès d
e la
Soc
iété
Fra
ncop
hone
de
Cla
ssifi
catio
nG
ascu
el O
1998
IFA
Mem
bre
du c
omite
d'o
rgan
isat
ion
Ecol
e C
NR
S-IN
RA
sur l
e Pr
otéo
me
Gas
cuel
O20
01IF
AM
embr
e du
com
ite d
'org
anis
atio
nEc
ole
du C
NR
S An
alys
e in
-silic
o de
séq
uenc
es g
énom
ique
sR
ival
s E
2001
IFA
Org
anis
atio
n Ec
ole
thém
atiq
ue C
NR
S-IN
RIA
"Pro
téom
e"G
ascu
el O
2001
IFA
Org
anis
atio
nEc
ole
thém
atiq
ue d
u C
NR
S "A
naly
se in
-silic
o de
s sé
quen
ces
géno
miq
ues"
G
ascu
el O
2000
IFA
Mem
bre
du c
onse
il sc
ient
ifiqu
eG
DR
ALP
Hab
ib M
2001
IFA
Mem
bre
du th
ème
Arith
mét
ique
Hau
te P
erfo
rman
ceBa
jard
JC
1998
IFA
Gro
upe
de tr
avai
l STS
(Spé
cific
atio
n Te
mpo
relle
et
Stoc
hast
ique
)Je
an-M
arie
A20
00
IFA
Mem
bre
de la
com
mis
sion
de
spéc
ialit
é du
Dép
arte
men
t "B
iom
étrie
et i
ntel
ligen
ce a
rtific
ielle
"IN
RA
Vila
rem
MC
1999
IFA
Mem
bre
du p
roje
t Arit
hmét
ique
des
ord
inat
eurs
et g
éom
étrie
al
gorit
hmiq
ueIn
ter G
DR
PR
C A
LPBa
jard
JC
1998
IFA
Mem
bre
du c
omité
de
prog
ram
me
JFPL
C'0
1Be
ssiè
re C
2001
IFA
Mem
bre
du c
omité
des
sag
esBe
ssiè
re C
2000
IFA
Mem
bre
du c
omité
de
prog
ram
me
Bess
ière
C19
9920
01IF
APr
ésid
ent d
u co
mité
de
prog
ram
me
Bess
ière
C20
00IF
AM
embr
e du
com
ité d
e pr
ogra
mm
eJo
urné
es F
ranç
aise
s d'
Appr
entis
sage
Gas
cuel
O20
00IF
APr
ésid
ent d
u co
mité
de
prog
ram
me
Jour
nées
Ouv
erte
s de
Bio
logi
e, In
form
atiq
ue e
t Mat
hém
atiq
ues
Gas
cuel
O20
00
IFA
Prés
iden
t du
com
ité d
e pr
ogra
mm
eJP
NC
00Be
ssiè
re C
2000
IFA
Réd
acte
ur a
djoi
ntC
hein
M19
9920
00IF
AM
embr
e du
com
ité d
e ré
dact
ion
Gas
cuel
O19
9920
00IF
AM
embr
e du
com
ité d
e ré
dact
ion
Rev
ue "T
SI"
Koni
g JC
1999
IFA
Com
ité d
e ré
dact
ion
Rev
ue «
L'o
bjet
»D
urco
urna
u R
1997
IFA
Mem
bre
du c
omité
de
réda
ctio
nR
evue
I3G
ascu
el O
2000
IFA
Mem
bre
du c
omité
de
prog
ram
me
RFI
A'98
Bess
ière
C19
98IF
AM
embr
e du
com
ité d
e pr
ogra
mm
eR
JCIA
Bess
ière
C19
98M
ICM
embr
e Ju
nior
Inst
itut U
nive
rsita
ire d
e Fr
ance
Rob
ert M
1996
2001
MIC
Con
seille
rC
SRT
(Min
istè
re)
Rob
ert M
1999
2000
MIC
Res
pons
able
du
Cen
tre d
e R
esso
urce
s en
Tes
t du
CN
FMBe
rtran
d Y
1999
2001
MIC
Res
pons
able
de
la C
entra
le d
’Ach
at e
t de
Mai
nten
ance
de
Logi
ciel
sD
ufaz
a C
1999
2001
MIC
Vice
-Pré
side
ntR
ober
t M19
9920
00M
ICM
embr
es é
lu d
e la
sec
tion
63C
NU
Cam
bon
G, R
oche
F.M
1999
2000
MIC
Res
pons
able
pro
gram
me
thém
atiq
ue S
OC
Cam
bon
G20
01M
ICM
embr
e du
con
seil
scie
ntifi
que
du d
épar
tem
ent S
TIC
Des
chac
ht D
2001
CN
FM
Con
fére
nce
LMO
CN
RS
GD
R A
RP
(Arc
hite
ctur
e, R
ésea
ux e
t sys
tèm
es, P
aral
lélis
me)
.
JNPC
Rev
ue "R
.I.A.
"
187

Dp
tFo
nct
ion
Org
anis
me
Qu
i D
ébu
tFi
nM
ICM
embr
e du
com
ité d
e pr
ogra
mm
e Jo
urné
es F
aibl
e Te
nsio
n Fa
ible
Con
som
m.
Auve
rgne
D19
9920
01M
ICM
embr
e du
Jur
y de
l'agr
égat
ion
exte
rne
Agré
gatio
n de
Gén
ie E
lect
rique
Cat
hébr
as G
1998
2003
MIC
Mem
bre
GD
R C
AOD
épar
tem
ent M
IC19
9820
01M
ICM
embr
e co
mm
issi
on d
e sp
écia
liste
s 61
Uni
vers
ité d
e N
ice
Rou
zeyr
e B
1999
MIC
Prés
iden
t ass
embl
ée d
es C
hefs
de
Dép
arte
men
t GTR
Com
ité P
édag
ogiq
ue N
atio
nal I
UT
Gal
y J
1999
RO
BC
orre
spon
dant
e du
LIR
MM
CN
RS.
– G
DR
ISIS
Aldo
n M
.J19
99R
OB
Mem
bre
du B
urea
uC
NR
S Ax
e "M
achi
nes
inte
lligen
tes"
Dau
chez
P19
99R
OB
Mem
bre
élu
de la
sec
tion
61C
NU
Jouv
ence
l B19
99R
OB
Mem
bre
de la
sec
tion
61C
NU
Four
nier
A19
9819
99R
OB
Mem
bre
de la
Com
mis
sion
Mac
hini
sme
agric
ole
CEM
AGR
EFLi
égeo
is A
1999
RO
BG
roup
e G
7 –
Mem
bre
fond
ateu
rC
lub
EEA
Prun
et F
1999
RO
BO
rgan
isat
ion
du c
ollo
que
Col
loqu
e G
RP
(Gro
upe
de R
eche
rche
pou
r la
Prod
uctiq
ue)
Prun
et F
, Cre
stan
i D, A
ndre
u D
2001
RO
BO
rgan
isat
ion
du c
ollo
que
Col
loqu
e P_
RSM
(Per
cept
ion
pour
la R
obot
ique
Sou
s-M
arin
e)Jo
uven
cel B
2001
RO
BM
embr
e du
com
ité d
e pr
ogra
mm
eC
onfé
renc
e In
tern
atio
nale
Fra
ncop
hone
d'A
utom
atiq
ueD
auch
ez P
2001
RO
BM
embr
e fo
ndat
eur e
t mem
bre
du B
urea
uPr
unet
F19
99R
OB
Co-
anim
ateu
r du
grou
pe "M
odél
isat
ion
d'en
trepr
ise"
Cre
stan
i DR
OB
Coo
rdon
nate
ur d
es jo
urné
es -
Mem
bre
du c
omité
de
prog
ram
me
Jour
nées
Nat
iona
les
de la
Rec
herc
he e
n R
obot
ique
JN
RR
'99
Dom
bre
E19
99
RO
BC
omité
de
prog
ram
me
Jour
nées
Nat
iona
les
de la
Rec
herc
he e
n R
obot
ique
JN
RR
'01
Aldo
n M
J, C
rosn
ier A
, Dom
bre
E20
01R
OB
Mem
bre
de la
CPC
"Inf
orm
atiq
ue in
dust
rielle
" et M
embr
e de
s co
mm
issi
ons
d'ex
perti
se d
es li
cens
es p
rofe
ssio
nnel
les
Min
istè
re d
e l'E
duca
tion
Nat
iona
leFo
urni
er A
2001
RO
BM
embr
e du
com
ité d
e ré
dact
ion
Rev
ue A
PII
Liég
eois
A19
99R
OB
Mem
bre
du c
omité
de
réda
ctio
nR
evue
Int.
de C
FAO
et d
'info
grap
hie
Dom
bre
E19
99R
OB
Mem
bre
du B
urea
u du
Gro
upe
Syst
èmes
Hyb
rides
SEE
Prun
et F
1999
Gro
upem
ent d
e R
eche
rche
en
Prod
uctiq
ue
188
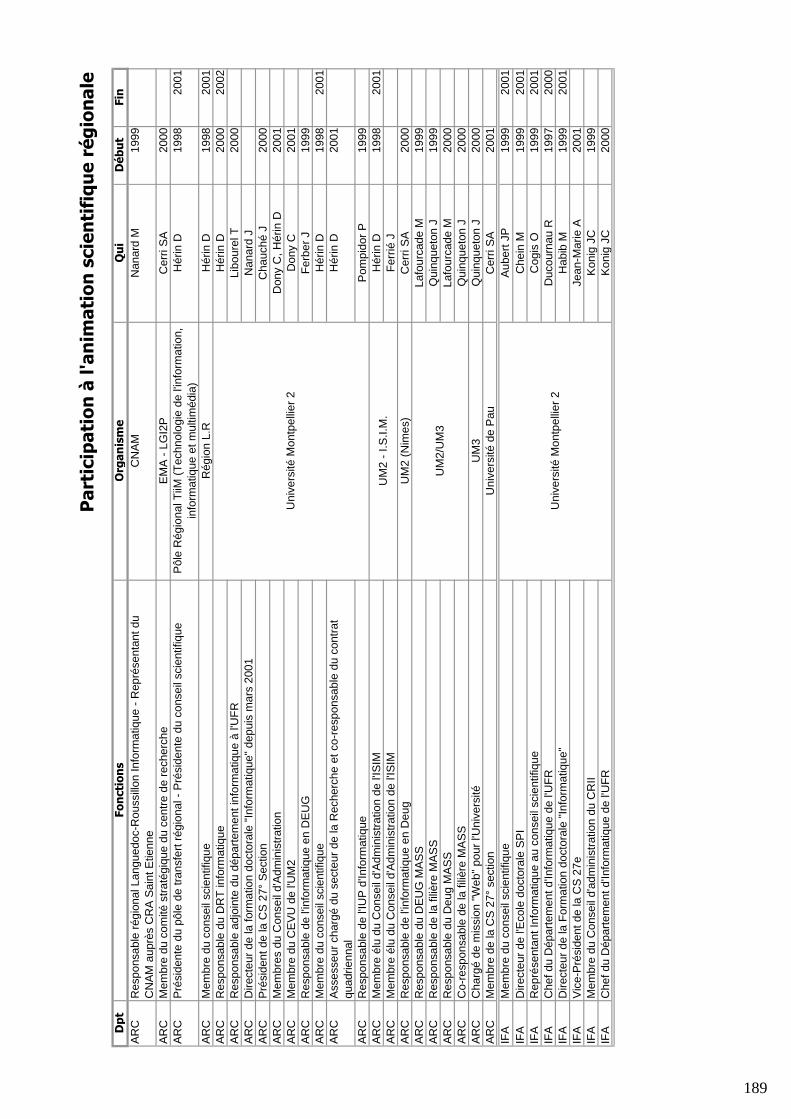
Par
tici
pat
ion
à l'
anim
atio
n s
cien
tifi
qu
e ré
gio
nal
e
Dp
tFo
nct
ion
sO
rgan
ism
eQ
ui
Déb
ut
Fin
ARC
Res
pons
able
régi
onal
Lan
gued
oc-R
ouss
illon
Info
rmat
ique
- R
epré
sent
ant d
u C
NAM
aup
rès
CR
A Sa
int E
tienn
eC
NAM
Nan
ard
M19
99
ARC
Mem
bre
du c
omité
stra
tégi
que
du c
entre
de
rech
erch
eEM
A - L
GI2
PC
erri
SA20
00AR
CPr
ésid
ente
du
pôle
de
trans
fert
régi
onal
- Pr
ésid
ente
du
cons
eil s
cien
tifiq
uePô
le R
égio
nal T
iiM (T
echn
olog
ie d
e l'in
form
atio
n,
info
rmat
ique
et m
ultim
édia
)H
érin
D19
9820
01
ARC
Mem
bre
du c
onse
il sc
ient
ifiqu
eR
égio
n L.
RH
érin
D19
9820
01AR
CR
espo
nsab
le d
u D
RT
info
rmat
ique
Hér
in D
2000
2002
ARC
Res
pons
able
adj
oint
e du
dép
arte
men
t inf
orm
atiq
ue à
l'U
FRLi
bour
el T
2000
ARC
Dire
cteu
r de
la fo
rmat
ion
doct
oral
e "In
form
atiq
ue" d
epui
s m
ars
2001
Nan
ard
JAR
CPr
ésid
ent d
e la
CS
27° S
ectio
nC
hauc
hé J
2000
ARC
Mem
bres
du
Con
seil
d'Ad
min
istra
tion
Don
y C
, Hér
in D
2001
ARC
Mem
bre
du C
EVU
de
l'UM
2D
ony
C20
01AR
CR
espo
nsab
le d
e l'in
form
atiq
ue e
n D
EUG
Ferb
er J
1999
ARC
Mem
bre
du c
onse
il sc
ient
ifiqu
eH
érin
D19
9820
01AR
CAs
sess
eur c
harg
é du
sec
teur
de
la R
eche
rche
et c
o-re
spon
sabl
e du
con
trat
quad
rienn
alH
érin
D20
01
ARC
Res
pons
able
de
l'IU
P d'
Info
rmat
ique
Pom
pido
r P19
99AR
CM
embr
e él
u du
Con
seil
d'Ad
min
istra
tion
de l'
ISIM
Hér
in D
1998
2001
ARC
Mem
bre
élu
du C
onse
il d'
Adm
inis
tratio
n de
l'IS
IMFe
rrié
JAR
CR
espo
nsab
le d
e l'in
form
atiq
ue e
n D
eug
UM
2 (N
imes
)C
erri
SA20
00AR
CR
espo
nsab
le d
u D
EUG
MAS
SLa
four
cade
M19
99AR
CR
espo
nsab
le d
e la
filiè
re M
ASS
Qui
nque
ton
J19
99AR
CR
espo
nsab
le d
u D
eug
MAS
SLa
four
cade
M20
00AR
CC
o-re
spon
sabl
e de
la fi
lière
MAS
SQ
uinq
ueto
n J
2000
ARC
Cha
rgé
de m
issi
on "W
eb" p
our l
'Uni
vers
itéU
M3
Qui
nque
ton
J20
00AR
CM
embr
e de
la C
S 27
° sec
tion
Uni
vers
ité d
e Pa
uC
erri
SA20
01IF
AM
embr
e du
con
seil
scie
ntifi
que
Aube
rt JP
1999
2001
IFA
Dire
cteu
r de
l'Eco
le d
octo
rale
SPI
Che
in M
1999
2001
IFA
Rep
rése
ntan
t Inf
orm
atiq
ue a
u co
nsei
l sci
entif
ique
Cog
is O
1999
2001
IFA
Che
f du
Dép
arte
men
t d'In
form
atiq
ue d
e l'U
FRD
ucou
rnau
R19
9720
00IF
AD
irect
eur d
e la
For
mat
ion
doct
oral
e "In
form
atiq
ue"
Hab
ib M
1999
2001
IFA
Vice
-Pré
side
nt d
e la
CS
27e
Je
an-M
arie
A
20
01IF
AM
embr
e du
Con
seil
d'ad
min
istra
tion
du C
RII
Koni
g JC
1999
IFA
Che
f du
Dép
arte
men
t d'In
form
atiq
ue d
e l'U
FRKo
nig
JC20
00
UM
2/U
M3
Uni
vers
ité M
ontp
ellie
r 2
Uni
vers
ité M
ontp
ellie
r 2
UM
2 - I
.S.I.
M.
189

Dp
tFo
nct
ion
sO
rgan
ism
eQ
ui
Déb
ut
Fin
MIC
Res
pons
able
du
DEU
G S
.T.P
.I.Be
rtran
d Y
1999
2001
MIC
Cha
rgé
de m
issi
on D
irect
ion
UFR
Sci
ence
sBe
rtran
d Y
1999
2001
MIC
Mem
bre
du C
onse
il de
l'U
FR-S
cien
ces
Bertr
and
Y20
0120
04M
ICM
embr
e du
con
seil
scie
ntifi
que
Cam
bon
G19
9720
01M
ICM
embr
es d
u co
nsei
l d'a
dmin
istra
tion
Cam
bon
G, N
ouet
P20
0120
04M
ICM
embr
e du
bur
eau
du c
onse
il sc
ient
ifiqu
eD
esch
acht
D19
9720
01M
ICD
irect
eur d
u C
RIT
-UM
IISa
gnes
G19
9220
00M
ICR
espo
nsab
le d
u D
épar
tem
ent G
énie
des
Tél
écom
. et R
ésea
ux (I
UT)
Gal
y J
2000
MIC
Prav
osso
udov
itch
S19
9920
01M
ICR
ouze
yre
B19
99M
ICD
irect
eur d
e l'E
cole
doc
tora
le "I
2S"
Rob
ert M
2001
MIC
Dire
cteu
r de
la F
orm
atio
n do
ctor
ale
"SYA
M"
Rob
ert M
1999
2001
MIC
Dire
cteu
r de
la F
orm
atio
n do
ctor
ale
"SYA
M"
Rou
zeyr
e B
2001
MIC
Res
pons
able
du
Dép
arte
men
t M
EA
Prav
osso
udov
itch
S19
99M
ICM
embr
es é
lus
du c
onse
il de
l'IS
IMN
ouet
P, R
ober
t M19
99M
ICM
embr
e él
u du
con
seil
de l'
ISIM
Sagn
es G
1999
2001
MIC
Mem
bre
élu
du c
onse
il de
l'IS
IMTo
rres
L20
01M
ICPr
ésid
ent d
u C
omité
d'e
xper
ts S
yst.
Info
r., M
athé
m. e
t Ele
ctro
n.R
égio
n L.
RC
ambo
n G
1999
RO
BD
irect
eur d
u C
IES
Acad
émie
de
Mon
tpel
lier
Four
nier
AR
OB
Res
pons
able
CN
AM "A
utom
atis
me"
CN
AMJo
uven
cel B
1999
RO
BR
epré
sent
ant d
u C
NR
S au
Com
ité D
irect
eur -
Con
seille
r sci
entif
ique
au
Bure
auG
roup
emen
t Rob
otiq
ue S
ud-M
édite
rrané
eJo
uven
cel B
1999
RO
BM
embr
e ex
térie
ur n
omm
é C
omm
issi
on d
e sp
écia
liste
s 61
ème
INSA
Lyo
nD
ombr
e E
2001
RO
BR
epré
sent
ant d
u LI
RM
M, t
réso
rier d
u pô
le, P
rési
dent
du
Con
seil
Scie
ntifi
que
et
Tech
niqu
ePô
le P
rodu
ctiq
ueD
ombr
e E
1999
RO
BC
hef d
u D
épar
tem
ent G
TR à
Béz
iers
UM
2 - I
UT
Frai
sse
P19
9820
00R
OB
Vice
-Pré
side
nt d
u C
onse
il d'
adm
inis
tratio
nFo
urni
er A
1999
2001
RO
BM
embr
e du
Con
seil
scie
ntifi
que
Jouv
ence
l B20
01R
OB
Res
pons
able
men
tion
Auto
mat
ique
de
la M
aîtri
se E
EAJo
uven
cel B
1999
RO
BPr
ésid
ent d
e la
Com
mis
sion
de
spéc
ialis
tes
61èm
eFo
urni
er A
2001
RO
BM
embr
e ex
térie
ur n
omm
é C
omm
issi
on d
e sp
écia
liste
s 61
ème
Uni
vers
ité P
aul S
abat
ier T
oulo
use
Frai
sse
P20
01
Uni
vers
ité M
ontp
ellie
r 2
UM
2 - I
.S.I.
M.
Vice
-pré
side
nt c
omm
issi
on s
péci
alis
tes
61-6
3
Uni
vers
ité M
ontp
ellie
r 2
190

Par
tici
pat
ion
au
x p
rog
ram
mes
eu
rop
éen
s et
inte
rnat
ion
aux
5èm
e P
CR
DD
pt
Pro
gra
mm
eS
uje
tP
arte
nai
res
Res
po
nsa
ble
Déb
ut
Fin
ARC
Agen
tLin
kM
ulti-
agen
t sys
tem
sR
ésea
u d'
exce
llenc
e (N
etw
ork
of E
xcel
lenc
e)
Ferb
er J
1997
2000
ARC
CO
MM
AC
orpo
rate
Mem
ory
Man
agem
ent
thro
ugh
Agen
tsC
oord
: At
os in
tégr
atio
n (F
r). C
entro
Stu
di E
Lab
orat
ori
Tele
com
unic
azio
ni S
pA (I
), IN
RIA
(Fr),
CN
RS
LIR
MM
(Fr),
U
nive
rsità
deg
li St
udi d
i Par
ma
(I), T
-Nov
a D
euts
che
Tele
kom
In
nova
tions
gese
llsch
aft m
bH
Qui
nque
ton
J20
0020
02
ARC
EUR
EKA
MAT
ISSE
Serv
eur d
'info
rmat
ions
EUR
IWAR
E, A
TOS
Salla
ntin
J19
99AR
CLA
RFL
AST
(INC
O
Cop
erni
cus)
Lear
ning
For
eign
Lan
guag
e Sc
ient
ific
Term
inol
ogy
Coo
rd :
Uni
vers
ity o
f Lee
ds (U
K). R
oman
ian
Acad
emy
Cen
ter f
or
Adva
nced
Res
earc
h in
Mac
hine
Lea
rnin
g, N
atur
al L
angu
age
Proc
essi
ng a
nd C
once
ptua
l Mod
ellin
g (R
oum
anie
), Si
mfe
ropo
l St
ate
univ
ersi
ty (U
krai
ne),
Sofia
Uni
vers
ity (B
ulga
rie),
Uni
vers
ité
Mon
tpel
lier 2
LIR
MM
(Fr),
Virt
ech
LTD
(Bul
garie
), U
nive
rsity
of
Man
ches
ter (
UK)
Cer
ri SA
1999
2001
ARC
MKB
EEM
Mul
tilin
gual
Kno
wle
dge
Base
d Eu
rope
an E
lect
roni
c M
arke
plac
eC
oord
: Fr
ance
Tel
ecom
CN
ET (F
r). U
nive
rsid
dad
Polit
ecni
ca d
e M
adrid
(Esp
.), N
atio
nal T
echn
ical
Uni
vers
ity o
f Ath
ens
(G),
CN
RS
LIR
MM
(Fr),
Tra
dezo
ne In
tern
atio
nal L
td (U
K), T
echn
ical
R
esea
rch
Cen
tre o
f Fin
land
(Fin
land
e), E
llos
Oy
(Fin
land
e),
SNC
F (F
r), F
iduc
iaire
jurid
ique
et f
isca
l de
Fran
ce (F
r)
Salla
ntin
J20
0020
02
ARC
MLN
ETM
achi
ne L
earn
ing
Rés
eau
d'ex
celle
nce
(Net
wor
k of
Exc
elle
nce)
Q
uinq
ueto
n J
1995
2000
ARC
OR
IEL
CN
RS
LIR
MM
(FR
), au
tres
parte
naire
s in
conn
usSa
llant
in J
2002
2004
ARC
SMAR
T-EC
Supp
ort f
or M
edia
tion
and
bRok
erin
g fo
r Ele
ctro
nic
Com
mer
ceC
oord
: Se
ma
Gro
up s
ae (E
sp.).
Uni
vers
idad
Pol
itecn
ica
de
Mad
rid (
Esp.
), N
atio
nal T
echn
ical
Uni
vers
ity o
f Ath
ens
(G),
CN
RS
LIR
MM
(Fr),
Fra
nce
Tele
com
CN
ET (F
r), T
rade
zone
In
tern
atio
nal L
td (U
K), A
naya
Mul
timed
ia (E
sp.)
Salla
ntin
J20
0020
02
ARC
SOC
RAT
ESC
DA
Thai
land
en
télé
mat
ique
&
Hyp
erm
édia
et i
ntel
ligen
ce a
rtific
ielle
Coo
rd :
Uni
v. K
ings
ton
(GB)
. Sou
th B
ank
(GB)
, Mun
ster
(Al.)
, Le
ipzi
g (A
ll.),
Barc
elon
e (E
sp.),
Mila
n (It
.), H
elsi
nki (
Fin)
Hér
in D
1999
2001
MIC
LIM
ITE
(Kee
p In
Tou
ch
proj
ect)
Libr
ary
Free
Inte
grat
ed c
ircui
t Des
ign
for S
ubm
icro
n Te
chno
logi
esC
oord
: U
nive
rsité
Mon
tpel
lier 2
LIR
MM
(Fr).
Inst
itut n
atio
nal
Poly
tech
niqu
e de
Gre
nobl
e (F
r), A
TMEL
AS2
(Fr),
Uni
vers
itat
Auto
nom
a de
bar
celo
ne (E
sp.),
Pon
tific
a un
iver
sida
de C
atol
ica
do R
io G
rand
e do
Sul
, Ins
titut
o de
Info
rmat
ica
(Bré
sil),
Auve
rgne
D19
9820
01
MIC
IST
Gra
nt A
pplic
atio
nO
rgan
izat
ion
of th
e XV
th e
ditio
n of
th
e D
esig
n of
Circ
uit a
nd In
tegr
ated
Sy
stem
s C
onfe
renc
e (D
CIS
200
0)
Uni
vers
ité M
ontp
ellie
r 2 L
IRM
M (F
r)Au
verg
ne D
2000
2001
MIC
EUR
EKA
MED
EASy
nthè
se p
hysi
que
et te
stBU
LL, T
hom
son,
Alc
atel
, MH
S, T
emen
to, P
hillip
s, C
NR
S/LI
P6Au
verg
ne D
, Pr
avos
soud
ovitc
h S
1998
2000
191

Dp
tP
rog
ram
me
Su
jet
Par
ten
aire
sR
esp
on
sab
leD
ébu
tFi
nM
ICEU
REK
A M
EDEA
+ A5
03 :
"ASS
OC
IATE
"M
étho
dolo
gies
et o
utils
logi
ciel
s de
C
AO p
our l
e te
st d
es s
ystè
mes
sur
pu
ce
Alca
tel M
icro
elec
troni
cs (B
), Al
cate
l Bel
l (B)
, Phi
lips
(NL)
, Phi
lips
(F),
Tem
ento
Sys
tem
s (F
), IN
ESC
ID (P
), In
fineo
n (F
), Te
cmic
(P)
Gira
rd P
, Ren
ovel
l M20
0120
04
MIC
EUN
ICE-
TEST
Eu
rope
an N
etw
ork
for i
nitia
l and
co
ntin
uing
Edu
catio
n in
VLS
I/SO
C
Test
ing
usin
g re
mot
e AT
E fa
cilit
ies
CN
RS
LIR
MM
(Fr),
Uni
vers
itat P
olite
cnic
a de
Cat
alun
ya (E
sp.),
Po
litec
nico
di T
orin
o (I)
, Uni
vers
ität S
tuttg
art (
D),
Inst
itu J
ozef
St
efan
(Slo
véni
e), A
gile
nt te
chno
logi
es F
ranc
e (F
r), U
nive
rsité
M
ontp
ellie
r 2 L
IRM
M (F
r),
Bertr
and
Y, F
lotte
s M
L20
0120
03
RO
BEU
RO
NEu
rope
an R
obot
ics
Res
earc
h N
etw
ork
Kung
liaga
Tek
nisk
a H
ögsk
olan
(Suè
de),
Rés
eau
d'ex
celle
nce
(Net
wor
k of
Exc
elle
nce)
Uni
vers
ité M
ontp
ellie
r 2 L
IRM
M. 8
0 pa
rtena
ires
http
://w
ww
.cas
.kth
.se/
EUR
ON
Dom
bre
E20
0120
04
RO
BM
ACH
21M
ultip
urpo
se a
nd c
ross
-sec
toria
l m
oder
nisa
tion
of m
anuf
actu
ring
proc
esse
s th
roug
h pa
ralle
l ki
nem
atic
s
Fatro
nik
Syst
em S
A (E
sp.),
Rhe
inis
ch-W
estä
lisch
e Te
chni
sche
H
ochs
chul
e Aa
chen
(D),
Ina
Wäl
zlag
er S
chae
ffler
(D),
Frau
nhof
er-G
esel
lsch
aft z
ur F
örde
rung
der
Ang
ewan
dten
Fo
rsch
ung
(D),
Karl
May
er M
alin
o Te
xtilm
asch
inen
fabr
ik G
mbH
(D
), C
NR
S LI
RM
M (F
r), In
dust
ias
Anay
ak (E
sp),
Gam
esa
Prod
ucci
ones
Aer
onau
ticas
(Esp
.), U
nive
rsitä
t Stu
ttgar
t (D
), C
omau
SpA
(I),
Arja
l, In
dust
ias
Met
alur
gica
s (P
), Le
rnst
att
Indu
strie
und
Aut
omot
sier
un g
stec
hnik
Gm
bH (D
)
Pier
rot F
2000
2003
RO
BR
OBO
TOO
LAd
vanc
ed k
inem
atic
s fo
r m
anuf
actu
ring
appl
icat
ions
Uni
vers
ität H
anno
ver (
D),
CN
R, I
stitu
to d
i Tec
nolo
gie
Indu
stria
li e
Auto
maz
ione
, Gru
po d
i Rob
otic
a Ap
plic
ata
(I),
Swed
ish
Inst
itute
of
Pro
duct
ion
Engi
neer
ing
Res
earc
h, R
egio
nal O
ffice
Sto
ckho
lm
(S),
Kath
olie
ke U
nive
rsite
it Le
uven
, dep
artt
Wer
ktui
gkun
de (B
), C
entro
de
inve
stig
acio
nes
tecn
olog
icas
(Esp
.), C
NR
S LI
RM
M
(Fr),
Rhe
inis
ch-W
estä
lisch
e Te
chni
sche
Hoc
hsch
ule
Aach
en (D
), D
elca
m P
lc, R
esea
rch
and
Dev
elop
men
t (U
K)
Pier
rot F
, Cro
snie
r A19
9820
00
Au
tres
pro
gra
mm
es in
tern
atio
nau
x D
ép.
Pro
gra
mm
eS
uje
tP
arte
nai
res
Res
po
nsa
ble
Déb
ut
Fin
ARC
ALLI
ANC
EU
n sy
stèm
e co
llabo
ratif
de
conc
eptio
n de
SIG
au
trave
rs d
u w
ebTr
ent U
nive
rsity
Not
tingh
am (G
B)Li
bour
el T
1998
2000
ARC
CAP
ES-C
OFE
CU
BAc
quis
ition
de
conn
aiss
ance
s po
ur
un a
ppre
ntis
sage
inte
lligen
tD
IAM
Mar
seille
, UFP
B U
n. F
éd. D
e Pa
raïb
a, U
FAL
Un.
Féd
. Al
agoa
sSa
llant
in J
1999
2000
ARC
Dic
tionn
aire
FEM
Con
stru
ctio
n D
ictio
nnai
re F
ranç
ais-
Angl
ais-
Mal
ais
USM
La
four
cade
M19
9820
01
ARC
Dic
tionn
aire
FEV
Con
stru
ctio
n d'
un d
ictio
nnai
re
Fran
çais
-Ang
lais
-Vie
tnam
ien
Uni
vers
ité d
e D
a N
ang
Lafo
urca
de M
2000
2001
ARC
Dic
tionn
aire
FET
Con
stru
ctio
n d'
un d
ictio
nnai
re
Fran
çais
-Ang
lais
-Tha
ïU
nive
rsité
Chu
lalo
ngko
rnLa
four
cade
M20
0020
01
ARC
SIG
MAT
ICS
Proj
et M
MA
: Ann
otat
ion
MPE
G7
Toky
oLa
four
cade
M
192

Dp
tP
rog
ram
me
Su
jet
Par
ten
aire
sR
esp
on
sab
leD
ébu
tFi
nAR
CPa
pillo
nC
ontra
t pou
r la
cons
truct
ion
coop
érat
ive
de d
ictio
nnai
res
mul
tilin
gue
NII
Toky
o, U
niv.
Kas
etsa
t Ban
gkok
, CLI
PS-G
eta
Gre
nobl
e de
puis
199
9
IFA
CAP
ES-C
OFE
CU
BSt
ruct
ures
et A
lgor
ithm
es e
n Th
eorie
de
s G
raph
esBr
ésil
: Uni
vers
ite F
eder
ale
de R
io d
e Ja
nero
, Uni
vers
ite d
e Fo
rtale
za L
aBR
I, Le
ibni
z, L
IRM
MH
abib
M20
0020
04
MIC
PRO
TEU
STe
st d
es c
ircui
ts m
ixte
s -
Nor
me
IEEE
114
9.4
Inst
itut J
osef
Ste
fan
Ren
ovel
l M20
0120
03
MIC
CAO
de
circ
uits
et d
e sy
stèm
es
inté
grés
num
ériq
ues
robu
stes
TIM
A, U
nive
rsité
de
Porto
Ale
gre
Rob
ert M
1999
2000
MIC
Test
de
circ
uits
mix
tes
et d
e m
icro
syst
èmes
- ci
rcui
ts
prog
ram
mab
les
Uni
vers
ité d
e Po
rto A
legr
e et
de
Rio
Ren
ovel
l M20
0120
03
RO
BEC
OS
Plat
e-fo
rme
mul
ti-m
anip
ulat
eurs
m
obile
sIn
stitu
t tec
hnol
ogiq
ue d
e To
luca
(Mex
ique
)Za
pata
R, A
ndre
u D
, Fr
aiss
e P
2001
2004
RO
BO
TAN
GO
ATS'
2000
Jouv
ence
l B,
Vaga
nay
J20
00
CAP
ES-C
OFE
CU
B
193

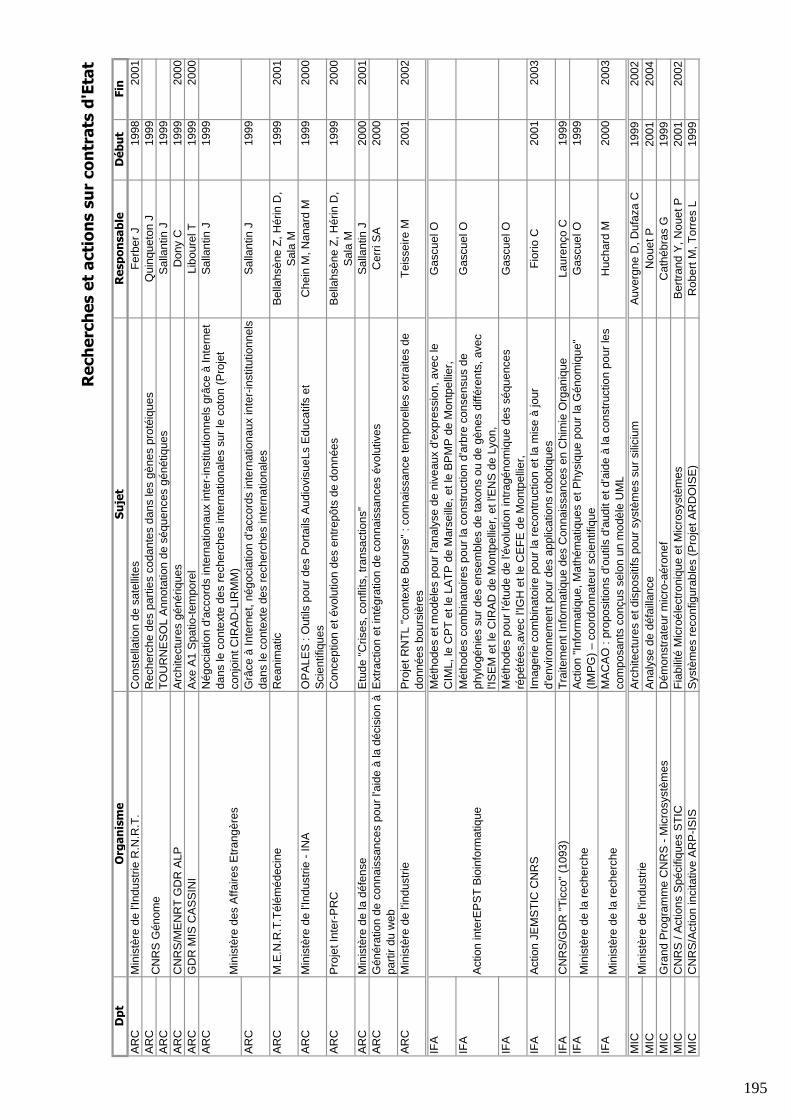
Rec
her
ches
et
acti
on
s su
r co
ntr
ats
d'E
tat
Dp
tO
rgan
ism
eS
uje
tR
esp
on
sab
leD
ébu
tFi
nAR
CM
inis
tère
de
l'Ind
ustri
e R
.N.R
.T.
Con
stel
latio
n de
sat
ellit
esFe
rber
J19
9820
01AR
CR
eche
rche
des
par
ties
coda
ntes
dan
s le
s gè
nes
prot
éiqu
esQ
uinq
ueto
n J
1999
ARC
TOU
RN
ESO
L An
nota
tion
de s
éque
nces
gén
étiq
ues
Salla
ntin
J19
99AR
CC
NR
S/M
ENR
T G
DR
ALP
Arch
itect
ures
gén
ériq
ues
Don
y C
1999
2000
ARC
GD
R M
IS C
ASSI
NI
Axe
A1 S
patio
-tem
pore
lLi
bour
el T
1999
2000
ARC
Nég
ocia
tion
d'ac
cord
s in
tern
atio
naux
inte
r-ins
titut
ionn
els
grâc
e à
Inte
rnet
da
ns le
con
text
e de
s re
cher
ches
inte
rnat
iona
les
sur l
e co
ton
(Pro
jet
conj
oint
CIR
AD-L
IRM
M)
Salla
ntin
J19
99
ARC
Grâ
ce à
Inte
rnet
, nég
ocia
tion
d'ac
cord
s in
tern
atio
naux
inte
r-ins
titut
ionn
els
dans
le c
onte
xte
des
rech
erch
es in
tern
atio
nale
sSa
llant
in J
1999
ARC
M.E
.N.R
.T.T
élém
édec
ine
Rea
nim
atic
Bella
hsèn
e Z,
Hér
in D
, Sa
la M
1999
2001
ARC
Min
istè
re d
e l'I
ndus
trie
- IN
AO
PALE
S : O
utils
pou
r des
Por
tails
Aud
iovi
sueL
s Ed
ucat
ifs e
t Sc
ient
ifiqu
esC
hein
M, N
anar
d M
1999
2000
ARC
Proj
et In
ter-P
RC
Con
cept
ion
et é
volu
tion
des
entre
pôts
de
donn
ées
Bella
hsèn
e Z,
Hér
in D
, Sa
la M
1999
2000
ARC
Min
istè
re d
e la
déf
ense
Etud
e "C
rises
, con
flits
, tra
nsac
tions
"Sa
llant
in J
2000
2001
ARC
Gén
érat
ion
de c
onna
issa
nces
pou
r l'a
ide
à la
déc
isio
n à
parti
r du
web
Extra
ctio
n et
inté
grat
ion
de c
onna
issa
nces
évo
lutiv
esC
erri
SA20
00
ARC
Min
istè
re d
e l'in
dust
riePr
ojet
RN
TL "c
onte
xte
Bour
se" :
con
nais
sanc
e te
mpo
relle
s ex
traite
s de
do
nnée
s bo
ursi
ères
Teis
seire
M20
0120
02
IFA
Mét
hode
s et
mod
èles
pou
r l'a
naly
se d
e ni
veau
x d'
expr
essi
on, a
vec
le
CIM
L, le
CPT
et l
e LA
TP d
e M
arse
ille, e
t le
BPM
P de
Mon
tpel
lier,
Gas
cuel
O
IFA
Mét
hode
s co
mbi
nato
ires
pour
la c
onst
ruct
ion
d'ar
bre
cons
ensu
s de
ph
ylog
énie
s su
r des
ens
embl
es d
e ta
xons
ou
de g
ènes
diff
éren
ts, a
vec
l'ISE
M e
t le
CIR
AD d
e M
ontp
ellie
r, et
l'EN
S de
Lyo
n,
Gas
cuel
O
IFA
Mét
hode
s po
ur l'
étud
e de
l'év
olut
ion
intra
géno
miq
ue d
es s
éque
nces
ré
pété
es,a
vec
l'IG
H e
t le
CEF
E de
Mon
tpel
lier,
Gas
cuel
O
IFA
Actio
n JE
MST
IC C
NR
SIm
ager
ie c
ombi
nato
ire p
our l
a re
cont
ruct
ion
et la
mis
e à
jour
d'
envi
ronn
emen
t pou
r des
app
licat
ions
robo
tique
sFi
orio
C20
0120
03
IFA
CN
RS/
GD
R "T
icco
" (10
93)
Trai
tem
ent I
nfor
mat
ique
des
Con
nais
sanc
es e
n C
him
ie O
rgan
ique
Laur
enço
C19
99IF
AM
inis
tère
de
la re
cher
che
Actio
n "In
form
atiq
ue, M
athé
mat
ique
s et
Phy
siqu
e po
ur la
Gén
omiq
ue"
(IMPG
) – c
oord
onna
teur
sci
entif
ique
Gas
cuel
O19
99
IFA
Min
istè
re d
e la
rech
erch
eM
ACAO
: pr
opos
ition
s d'
outil
s d'
audi
t et d
'aid
e à
la c
onst
ruct
ion
pour
les
com
posa
nts
conç
us s
elon
un
mod
èle
UM
LH
ucha
rd M
2000
2003
MIC
Arch
itect
ures
et d
ispo
sitif
s po
ur s
ystè
mes
sur
silic
ium
Auve
rgne
D, D
ufaz
a C
1999
2002
MIC
Anal
yse
de d
éfai
llanc
eN
ouet
P20
0120
04M
ICG
rand
Pro
gram
me
CN
RS
- Mic
rosy
stèm
esD
émon
stra
teur
mic
ro-a
éron
efC
athé
bras
G19
99M
ICC
NR
S / A
ctio
ns S
péci
fique
s ST
ICFi
abilit
é M
icro
élec
troni
que
et M
icro
syst
èmes
Bertr
and
Y, N
ouet
P20
0120
02M
ICC
NR
S/Ac
tion
inci
tativ
e AR
P-IS
ISSy
stèm
es re
conf
igur
able
s (P
roje
t AR
DO
ISE)
Rob
ert M
, Tor
res
L19
99
CN
RS
Gén
ome
Min
istè
re d
es A
ffaire
s Et
rang
ères
Min
istè
re d
e l'in
dust
rie
Actio
n in
terE
PST
Bioi
nfor
mat
ique
195

Dp
tO
rgan
ism
eS
uje
tR
esp
on
sab
leD
ébu
tFi
nM
ICAx
e "In
terc
onne
xion
s de
s sy
stèm
es s
ur p
uce"
Des
chac
ht D
1999
MIC
Axe
"Arc
hite
ctur
es e
t out
ils d
e si
mul
atio
n"R
ober
t M19
99M
ICC
NR
S/G
DR
Tra
item
ent d
u Si
gnal
et d
es im
ages
ISIS
Circ
uits
et n
ouve
lles
tech
nolo
gies
Rob
ert M
, Tor
res
L,
Cat
hebr
as G
1999
MIC
CN
RS/
Jeun
e éq
uipe
Syst
ème
de v
isio
n in
tégr
ée b
iolo
giqu
emen
t pla
usib
leTo
rres
L, Z
apat
a R
1999
2000
RO
BC
NR
SAc
tion
stra
tégi
que
"Mac
hine
s in
tellig
ente
s"Al
don
MJ,
Dau
chez
P19
99R
OB
CN
RS/
Actio
n Je
mST
IC (R
OB
et IF
A)Im
ager
ie c
ombi
nato
ire p
our l
a re
cons
truct
ion
et la
mis
e à
jour
d'
envi
ronn
emen
t pou
r des
app
licat
ions
robo
tique
sC
rosn
ier A
, Fio
rio C
2001
2003
RO
BC
NR
S/Je
une
Equi
peR
obot
ique
méd
ical
eD
ombr
e E,
Pie
rrot F
2000
RO
BLA
G, L
GIP
M, L
IRM
M, L
MS,
LR
P, L
VRPr
ojet
RO
BEA
: Com
man
de p
our l
a m
arch
e et
la c
ours
e d'
un ro
bot b
ipèd
e Po
igne
t P20
0120
03
RO
BLI
RM
M (R
OB
et A
RC
), La
b. M
ouve
men
t et P
erce
ptio
n M
arse
illePr
é-Pr
ojet
RO
BEA
: Coo
rdin
atio
n de
tâch
es s
enso
ri-m
otric
es p
ar la
co
opér
atio
n ro
bust
e d'
entit
és d
istin
ctes
che
z le
s ro
bots
et c
hez
l'hom
me
Liég
eois
A20
0120
03
RO
BLI
RM
M, I
NR
IA R
hône
Alp
es, P
RO
PAR
APr
ojet
RO
BEA
: Con
trôle
du
mou
vem
ent d
u m
embr
e in
férie
ur h
umai
n pa
raly
sé s
ous
stim
ulat
ion
élec
triqu
eG
uira
ud D
, Poi
gnet
P,
Dom
bre
E20
0120
03
RO
BLI
RM
M, L
aRAM
A, L
ASM
EA, I
RC
CyN
, IN
RIA
Sop
hia
Proj
et R
OBE
A : R
obot
s à
arch
itect
ure
com
plex
e : d
e la
con
cept
ion
à la
pe
rform
ance
et l
'aut
onom
iePi
erro
t F, P
oign
et P
, D
ombr
e E
2001
2003
RO
BLI
RM
M, L
RP,
CEA
/SC
SI, H
ôpita
l Piti
é Sa
lpêt
rière
Proj
et R
OBE
A : C
once
ptio
n et
com
man
de d
e sy
stèm
es p
our g
este
s de
xtre
s. A
pplic
atio
n à
la c
hiru
rgie
end
osco
piqu
e et
la m
icro
-chi
rurg
iePi
erro
t F, P
oign
et P
, D
ombr
e E
2001
2003
RO
BLP
PA, L
IRM
M, W
ANY
SA, S
té B
EVPr
ojet
RO
BEA
: Psi
khar
pax,
ver
s la
syn
thès
e d'
un ra
t arti
ficie
l Za
pata
R20
0120
03R
OB
Min
istè
re d
e l'in
dust
rie, R
NTS
SIN
TER
S SI
QU
ALIS
, C
EA/S
RSI
, LAA
S, L
IRM
M, I
ET, I
NR
IA R
hône
-Alp
es,
CER
T/D
CSD
CH
U, H
ôpita
l Ran
guei
l
Proj
et E
ND
OXY
RO
B : C
once
ptio
n et
dév
elop
pem
ent d
'un
robo
t tél
éopé
ré
de c
hiru
rgie
end
osco
piqu
eD
ombr
e E,
Pie
rrot F
, Po
igne
t P20
0020
02
CN
RS/
GD
R N
anoé
lect
roni
que
196

Rec
her
ches
et
acti
on
s su
r co
ntr
ats
ind
ust
riel
s
Dp
tO
rgan
ism
eS
uje
tR
esp
on
sab
leD
ébu
tFi
nAR
CAL
BER
T IN
CAn
alys
e du
com
porte
men
t des
Util
isat
eurs
dan
s l'e
nviro
nnem
ent d
e D
ata
Min
ing.
Hér
in D
, Pon
cele
t P20
0020
01AR
CED
F-D
ERPr
ojet
Aus
trali
Rei
tz P
1999
ARC
EUR
IWAR
ED
ésam
bigu
isat
ion
sém
antiq
ue p
ar l'
utilis
atio
n d'
onto
logi
es p
our a
mél
iore
r l'in
dexa
tion
auto
mat
ique
de
docu
men
tsSa
llant
in J
1998
2001
ARC
Co-
resp
onsa
ble
du p
roje
t CAR
ISM
A (C
once
ptio
n de
sys
tèm
es m
ulti-
agen
ts p
our l
es
Télé
com
s)Fe
rber
J19
99
ARC
Inté
grat
ion
d'in
form
atio
ns is
sues
de
sour
ces
hété
rogè
nes
sur l
e W
ebH
érin
D, P
ompi
dor P
, Sal
a M
1999
ARC
Appr
entis
sage
et a
gent
ratio
nnel
Salla
ntin
J19
99AR
CPr
ojet
"Rés
eau
futé
"Q
uinq
ueto
n J
1999
ARC
Inté
grat
ion
et e
xplo
itatio
n d'
info
rmat
ions
sem
i-stru
ctur
ées
issu
es d
e so
urce
s hé
téro
gène
sH
érin
D20
00
ARC
Gén
érat
ion
de c
onna
issa
nces
pou
r l'a
ide
à la
déc
isio
n à
parti
r du
web
Extra
ctio
n et
inté
grat
ion
de c
onna
issa
nces
évo
lutiv
esC
erri
SA
ARC
IBM
Trad
uctio
n de
lang
age
de p
rogr
amm
atio
n pa
r sys
tèm
es tr
ansf
orm
atio
nnel
sC
hauc
hé J
1999
ARC
PHAE
STO
SBo
rnes
mul
timed
ias
au m
usée
nat
iona
l des
tech
nolo
gies
Nan
ard
M19
9819
98AR
CPr
é-pi
lote
info
rmat
ique
Salla
ntin
J19
9819
99AR
CAi
de à
la c
ompr
éhen
sion
des
pro
blèm
es d
e sy
nthè
se o
rgan
ique
Qui
nque
ton
J, L
aure
nço
C19
9819
99AR
CSy
stèm
e m
ulti-
agen
ts p
our l
a co
ncep
tion
de p
lans
de
synt
hèse
en
chim
ie o
rgan
ique
Laur
enço
C, Q
uinq
ueto
n J
1999
ARC
Acco
rd d
'inte
rface
Salla
ntin
J19
99AR
C/IF
AFR
ANC
E TE
LEC
OM
CN
ET -
RN
RT
Res
truct
urat
ion
de c
ompo
sant
s lo
gici
els
Don
y C
, Huc
hard
M,
Libo
urel
T19
9720
00
IFA
Inté
grat
ion
cont
rain
tes
et o
bjet
sD
ucou
rnau
R19
9619
99IF
AIn
fére
nce
gram
mat
ical
e po
ur l'
appr
entis
sage
de
la s
ynta
xe e
n re
conn
aiss
ance
de
la
paro
le e
t dia
logu
e or
alde
la H
igue
ra C
1997
1998
IFA
EDF
Etud
e de
l'év
olut
ion
de l'
algo
rithm
e R
TPH
abib
M19
9920
00IF
AED
F-D
ERAl
gorit
hmes
de
reco
nfig
urat
ion
du ré
seau
sec
onda
ireC
ogis
O19
99IF
AR
ésol
utio
n de
s pr
oblè
mes
sur
con
train
tes
Bess
ière
C19
9920
02IF
AAl
gorit
hmes
effi
cace
s de
sat
isfa
ctio
n de
con
train
tes
Bess
ière
C20
00IF
ASA
NO
FID
ével
oppe
men
t et m
ise
au p
oint
d'u
n lo
gici
el d
e pe
rcep
tion
des
mol
écul
es e
n sy
nthè
se
orga
niqu
eD
ucou
rnau
R19
9719
98
MIC
Mac
ro-c
ellu
les
Rob
ert M
, Tor
rès
L19
9819
98M
ICO
ptim
isat
ion
des
perfo
rman
ces
et d
e la
fiab
ilité
des
mém
oire
s no
n-vo
latil
es e
mba
rqué
es
dans
une
app
roch
e gl
obal
e de
rédu
ctio
n d'
éche
lle d
e ci
rcui
ts in
tégr
ésAu
verg
ne D
1999
2002
MIC
Etud
e et
con
cept
ion
de v
éhic
ule
de c
arac
téris
atio
n de
s pa
ram
ètre
s pa
rasi
tes
de ro
utag
e et
des
phé
nom
èmes
de
latc
h-up
et d
'ESD
Auve
rgne
D19
9920
02
MIC
Etud
e de
l'in
serti
on e
t l'im
plan
tatio
n de
mac
roce
llule
s co
mpl
exes
Rob
ert M
, Tor
res
L19
99M
ICBU
LLO
utils
de
CAO
pou
r la
conc
eptio
n de
s ci
rcui
ts in
tégr
és V
LSI e
t ULS
ILa
ndra
ult C
1998
2000
MIC
FRAN
CE
TELE
CO
M R
&DEt
ude
de m
étho
des
de c
once
ptio
n et
de
valid
atio
n de
sys
tèm
es in
tégr
és c
ompl
exes
Cam
bon
G, R
ober
t M,
Rou
zeyr
e B,
Flo
ttes
ML,
To
rres
L
1997
2000
FRAN
CE
TELE
CO
M C
NET
SAN
OFI
ATM
EL
CN
ET
ILO
G
197

Dp
tO
rgan
ism
eS
uje
tR
esp
on
sab
leD
ébu
tFi
nM
ICM
étho
dolo
gie
avan
cée
de c
once
ptio
n de
circ
uits
inté
grés
bas
és s
ur le
con
cept
de
cellu
les
virtu
elle
sAu
verg
ne D
, Rob
ert M
1999
2002
MIC
Appr
oche
Bib
lioth
èque
s Vi
rtuel
les"
de
conc
eptio
n de
circ
uits
inté
grés
: G
estio
n de
to
polo
gie
et d
e pe
rform
ance
s".
Rob
ert M
2001
2004
MIC
INTE
LBu
ilt-In
Sel
f-Tes
t of S
eque
ntia
l Circ
uits
: Ini
tializ
atio
n pr
oble
m o
f pip
elin
ed c
ircui
tsLa
ndra
ult C
, Flo
ttes
ML,
G
irard
P19
9920
02
MIC
IRO
C T
echn
olog
ies
Dév
elop
pem
ent d
'un
outil
CAO
pou
r le
durc
isse
men
t de
cellu
les
mém
oire
sR
oche
FM
2000
2003
MIC
MEM
SCAP
Opt
imis
atio
n du
rend
emen
t de
fabr
icat
ion
des
mic
ro-s
ystè
mes
Duf
aza
C19
9920
02M
ICEx
plor
atio
n et
val
idat
ion
d'ar
chite
ctur
e de
sys
tèm
es c
ompl
exes
fond
és s
ur u
n ou
plu
sieu
rs
cœur
s de
DSP
, pos
ition
nem
ent m
atér
iel/l
ogic
iel,
appl
icat
ion
DVD
enr
egis
trabl
eC
ambo
n G
1998
2001
MIC
Arch
itect
ure
à re
conf
igur
abilit
é ra
pide
déd
iée
aux
syst
èmes
d'id
entif
icat
ion
biom
étriq
ueTo
rres
L, R
ober
t M20
0020
03M
ICM
odél
isat
ion
des
com
posa
nts
élec
troni
ques
ana
logi
ques
à fa
ible
cou
rant
de
fonc
tionn
emen
tAu
verg
ne D
, Duf
aza
C19
9920
02
MIC
VLSI
Tec
hnol
ogy
Mét
hodo
logi
e de
con
cept
ion
de c
ircui
ts in
tégr
és m
ixte
s A
uver
gne
D, R
ober
t M19
9719
99M
ICSY
NPL
ICIT
YVé
rific
atio
n de
Circ
uits
Inté
grés
Rou
zeyr
e B,
Tor
res
L20
0120
04R
OB
AP'A
RT
Rep
rodu
ctio
n de
scu
lptu
re a
ssis
tée
par o
rdin
ateu
rC
roni
er A
, Dom
bre
E,
Pier
rot F
2000
2001
RO
BAR
MIN
ESAi
de à
la m
odél
isat
ion
et à
l'an
alys
e de
s al
éas
de p
rodu
ctio
nPr
unet
F, C
rest
ani D
1996
1999
RO
BC
EA /C
ESTA
Posi
tionn
emen
t de
préc
isio
n de
cib
les
cryo
géni
ques
Pier
rot F
RO
BC
EA V
alrh
o, S
NR
IG
énér
atio
n de
traj
ecto
ires
sous
con
train
tes
pour
un
robo
t de
proj
ectio
n pl
asm
aD
ombr
e E
1997
1999
RO
BD
ASSA
ULT
SYS
TEM
ESD
ével
oppe
men
t et i
ntég
ratio
n da
ns C
ATIA
d'o
utils
d'o
ptim
isat
ion
des
ligne
s ro
botis
ées
Dom
bre
E, L
iége
ois
A19
9719
99
RO
BIF
REM
ERM
ise
en c
orre
spon
danc
e d'
imag
es s
ous-
mar
ines
Aldo
n M
J, S
traus
s O
1997
1998
RO
BLE
MO
INE-
POU
YET
Mod
élis
atio
n d'
asse
rvis
sem
ents
num
ériq
ues
d'ax
es d
e m
achi
nes-
outil
s gr
ande
vite
sse
Poig
net P
2000
2001
RO
BR
ENAU
LT-A
UTO
MAT
ION
/ C
OM
AUM
odél
isat
ion
de m
achi
nes-
outil
s pa
rallè
les
Pier
rot F
1999
RO
BW
ANY
Etud
e dé
taillé
e d'
un ro
bot m
obile
Pier
rot F
1999
2000
ST M
ICR
OEL
ECTR
ON
ICS
INFI
NEO
N
198

Rec
her
ches
et
acti
on
s av
ec d
'au
tres
org
anis
mes
de
rech
erch
e fr
ança
is
Dp
tO
rgan
ism
eS
uje
tR
esp
on
sab
leD
ébu
tFi
nAR
CIN
RA
Ges
tion
inté
grée
des
ress
ourc
es n
atur
elle
s re
nouv
elab
les
des
terri
toire
s et
des
pol
itiqu
es p
ubliq
ues
Ferb
er J
1999
1999
ARC
CEM
AGR
EFM
odél
isat
ion
et im
plém
enta
tion
d'un
e ba
se d
e m
étad
onné
es
géné
rique
s Li
bour
el T
2001
2002
ARC
CIR
ADC
once
ptio
n d'
outil
s d'
aide
à la
nég
ocia
tion
d'ac
cord
s in
ter-
inst
itutio
nnel
sSa
llant
in J
2000
2000
ARC
LASE
R (L
abor
atoi
re d
e Sc
ienc
es
Econ
omiq
ues)
Etud
e de
s do
nnée
s su
r la
polit
ique
éco
nom
ique
Sala
M20
00
IFA
CIR
ADPh
ylog
énie
des
esp
èces
vég
étal
es, p
roje
t sou
tenu
par
Gen
opla
nte
et
le m
onde
indu
strie
lleG
ascu
el O
IFA
CEM
AGR
EF
Tech
niqu
es s
ymbo
lique
s et
com
bina
toire
s po
ur l'
aide
à la
mis
e en
oe
uvre
de
mod
èles
déf
orm
able
s su
r des
imag
es c
ompl
exes
Fior
io C
2001
2003
MIC
Etud
e et
con
cept
ion
de v
éhic
ules
de
test
s gé
nériq
ues.
Etu
de d
es
pote
ntia
lités
de
la te
chni
que
de m
esur
e ID
DQ
Nou
et P
, Ren
ovel
l M19
9819
98
MIC
Eval
uatio
n d’
une
CAO
mic
ro-s
ystè
mes
, spé
cific
atio
n et
con
cept
ion
d’un
dém
onst
rate
ur -
Etud
e et
con
cept
ion
de v
éhic
ules
de
test
dan
s le
do
mai
ne d
es m
icro
syst
èmes
Duf
aza
C, N
ouet
P19
9920
00
MIC
Util
isat
ion
de v
éhic
ules
de
test
pou
r l'é
valu
atio
n de
la fi
abilit
é de
s di
spos
itifs
mic
rosy
stèm
es F
SBM
sur
une
bas
e de
pro
cess
CM
OS
Nou
et P
2001
2001
RO
BEt
ude
de m
étho
des
prob
abilis
tes
pour
am
élio
rer l
a ro
bust
esse
de
la
mis
e en
cor
resp
onda
nce
d'im
ages
Aldo
n M
J19
9719
98
RO
BEt
ude
d'al
ogor
ithm
es d
'hyb
ridat
ion
de m
osaï
que
d'im
age
avec
la
navi
gatio
n en
gin
Ald
on M
J20
0020
01
RO
BR
allie
men
t à u
ne b
ase
acou
stiq
ue p
ar u
n AU
VJo
uven
cel B
2001
RO
BPo
sitio
nnem
ent r
elat
if d'
AUV
Jouv
ence
l B, V
agan
ay J
1999
RO
BG
estio
n de
flot
ille d
e ba
lises
mot
oris
ées
Jouv
ence
l B, V
agan
ay J
2000
RO
BIC
ARE,
LIM
OS
Inté
grat
ion
des
nouv
elle
s te
chno
logi
es d
e la
télé
com
mun
icat
ion
pour
la
Tél
éapp
licat
ion.
Com
man
de d
e sy
stèm
es d
ista
nts
Frai
sse
P, A
ndre
u D
2000
2002
IFR
EMER
CN
ES
199


Act
ion
s ré
gio
nal
es
Dp
tO
rgan
ism
eS
uje
tR
esp
on
sab
leD
ébu
tFi
nAR
CEn
trepô
t de
donn
ées
Bella
hsèn
e Z
1999
2000
ARC
Dév
elop
pem
ent d
'un
logi
ciel
d'a
ide
à la
com
préh
ensi
on d
es p
robl
èmes
de
synt
hèse
en
chim
ie o
rgan
ique
Qui
nque
ton
J19
9920
00
ARC
Anal
yse
du c
ompo
rtem
ent d
es u
tilis
ateu
rsTe
isse
ire M
, Pon
cele
t P19
99AR
CAN
IMU
S 3D
Libo
urel
T19
99AR
CPa
ge J
ocke
y : c
réat
ion
d'un
logi
ciel
de
conc
eptio
n m
ultim
édia
(Sté
Isim
édia
)N
anar
d M
2000
ARC
Dat
a m
inin
g po
ur l'
anal
yse
du c
ompo
rtem
ent d
es u
sage
rs (S
té A
lber
t Inc
.)Po
ncel
et P
2000
ARC
TiiM
– IS
I MED
IAEn
viro
nnem
ent d
e co
ncep
tion
d'hy
perm
édia
sN
anar
d M
1999
ARC
Con
cept
ion
d'un
ent
repô
t de
donn
ées
sur l
e tra
nscr
ipto
me
et le
pro
téom
e d'
une
cellu
leH
érin
D, M
arti
J, S
ala
M19
99
ARC
Inst
alla
tion
d'un
rése
au à
hau
ts d
ébits
Hér
in D
1996
1999
ARC
sim
ulat
ion
dist
ribué
eFe
rber
J20
01AR
CC
PER
Foui
lle d
e do
nnée
s po
ur d
es re
quêt
es e
n la
ngag
e na
ture
lPo
ncel
et P
2000
IFA
Pôle
TIIM
Proj
et M
OG
ADO
R (e
n co
llabo
ratio
n av
ec l'
ABES
et l
a BI
U) :
con
cept
ion
d'un
e co
uche
"r
ésea
u sé
man
tique
" dan
s le
s sy
stèm
es d
ocum
enta
ires
Che
in M
2000
IFA
Proj
et p
lurid
isci
plin
aire
MAN
UEL
A D
épar
tem
ent E
EAI,
Labo
rato
ire C
EM2
et
LIR
MM
.
Le p
roje
t MAN
UEL
A (M
odél
isat
ion
Anal
ytiq
ue e
t Num
ériq
ue d
es L
aser
s) a
pou
r obj
et
l'étu
de d
e la
sers
au
nive
au q
uant
ique
par
des
mét
hode
s co
mbi
nato
ires
(q-s
érie
s,
parti
tions
) et s
toch
astiq
ues
(cha
înes
de
Mar
kov,
leur
réso
lutio
n et
leur
sim
ulat
ion)
.
Jean
-Mar
ie A
2000
MIC
JESS
ICA
Fran
ceTr
ansf
ert C
once
ptio
n AS
IC v
ers
les
PME/
PMI
Sagn
es G
1991
2000
MIC
MO
RG
AN M
ULT
IMED
IAC
ON
VEN
TIO
N C
OR
TEC
HS
: Ent
repr
ise/
Cen
tre d
e C
ompé
tenc
esTo
rrès
L20
0120
02R
OB
CPE
R/ P
ôle
Prod
uctiq
ue /
SIN
TER
S S.
A.R
obot
méd
ical
pou
r le
prél
èvem
ent d
e pe
au e
n ch
irurg
ie d
es g
rand
s br
ûlés
et o
rthop
édie
D
ombr
e E,
Pie
rrot F
2000
RO
BPr
ojet
SPR
INTT
AP'
ART
Réa
lisat
ion
et m
ise
au p
oint
d'u
n pa
ntog
raph
e au
tom
atis
é tri
dim
ensi
onne
l à im
age
virtu
elle
Cro
snie
r A20
0120
02
RO
BPr
ojet
SPR
INTT
EC
LSt
abilis
atio
n d'
imag
es p
our l
'insp
ectio
n de
s lig
nes
élec
triqu
es p
ar in
fra ro
uge
Aldo
n M
J, S
traus
s O
2001
2002
RO
BPr
ojet
SPR
INTT
Hyt
ecPr
otot
ype
de s
ous-
mar
in a
uton
ome
d'in
spec
tion
Jouv
ence
l B20
0120
02R
OB
Etud
e de
fais
abilit
é d'
un k
it de
robo
tique
Pier
rot F
1999
2002
RO
BC
réat
ion
d'un
site
exp
érim
enta
l d'in
stru
men
tatio
n et
de
robo
tique
sou
s-m
arin
eD
auch
ez P
1997
2000
RO
B/M
ICU
M II
– J
eune
équ
ipe
Com
man
de à
dis
tanc
e de
sys
tèm
es c
ompl
exes
via
l'U
MTS
Andr
eu D
, Gal
y J
1999
2001
RO
B/M
ICD
épar
tem
ent E
EAI,
Actio
n pl
urid
sici
plin
aire
(R
OB,
MIC
)Pr
ojet
SEN
IS (S
timul
atio
n El
ectri
que
Neu
rale
Dis
tribu
ée)
Gui
raud
D, C
athé
bras
G20
0120
02
RO
B/AR
CD
épar
tem
ent E
EAI,
Actio
n pl
urid
sici
plin
aire
(R
OB,
AR
C)
Coo
péra
tion
de s
ystè
mes
mul
ti-ag
ents
en
robo
tique
Liég
eois
A, F
erbe
r J20
0020
03
Rég
ion
LR
Pôle
TiiM
Rég
ion
LR
201

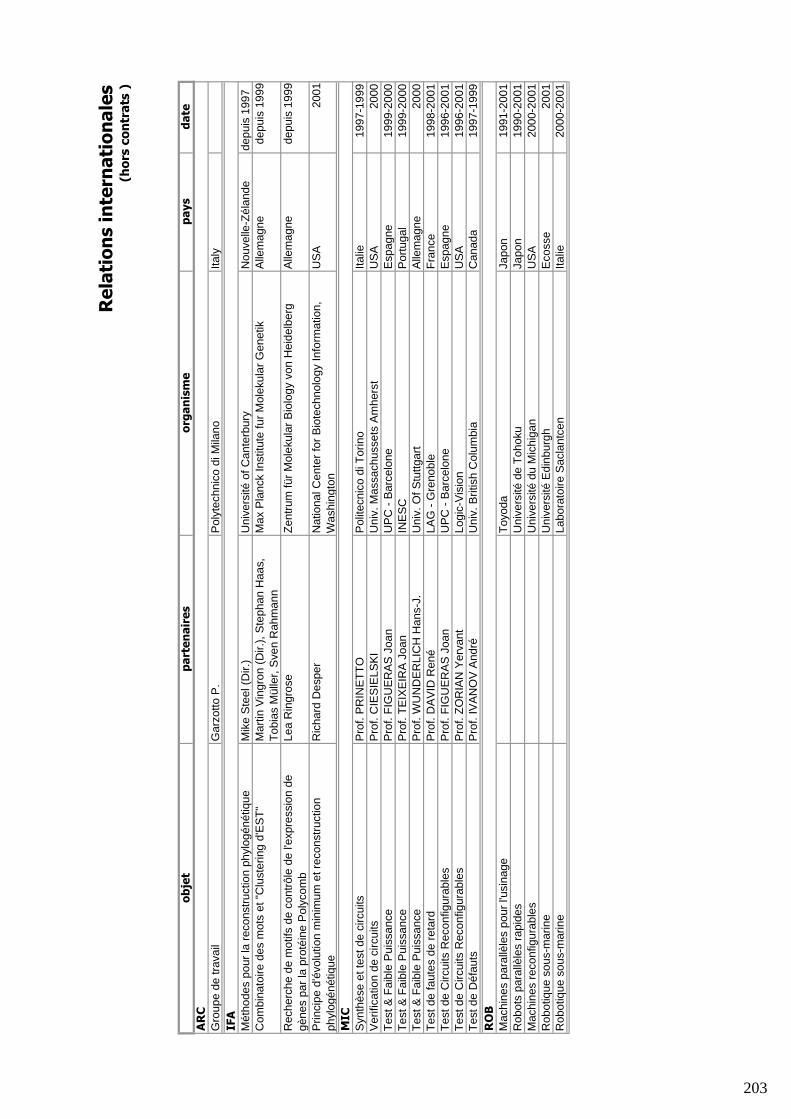
Rel
atio
ns
inte
rnat
ion
ales
(ho
rs c
on
trat
s )
ob
jet
par
ten
aire
so
rgan
ism
ep
ays
da
teA
RC
Gro
upe
de tr
avai
lG
arzo
tto P
.Po
lyte
chni
co d
i Mila
noIta
lyIF
AM
étho
des
pour
la re
cons
truct
ion
phyl
ogén
étiq
ue
Mik
e St
eel (
Dir.
) U
nive
rsité
of C
ante
rbur
yN
ouve
lle-Z
élan
dede
puis
199
7 C
ombi
nato
ire d
es m
ots
et "C
lust
erin
g d'
EST"
M
artin
Vin
gron
(Dir.
), St
epha
n H
aas,
To
bias
Mül
ler,
Sven
Rah
man
n M
ax P
lanc
k In
stitu
te fu
r Mol
ekul
ar G
enet
ikAl
lem
agne
depu
is 1
999
Rec
herc
he d
e m
otifs
de
cont
rôle
de
l'exp
ress
ion
de
gène
s pa
r la
prot
éine
Pol
ycom
bLe
a R
ingr
ose
Zent
rum
für M
olek
ular
Bio
logy
von
Hei
delb
erg
Alle
mag
nede
puis
199
9
Prin
cipe
d'é
volu
tion
min
imum
et r
econ
stru
ctio
n ph
ylog
énét
ique
Ric
hard
Des
per
Nat
iona
l Cen
ter f
or B
iote
chno
logy
Info
rmat
ion,
W
ashi
ngto
nU
SA20
01
MIC
Synt
hèse
et t
est d
e ci
rcui
tsPr
of. P
RIN
ETTO
Polit
ecni
co d
i Tor
ino
Italie
1997
-199
9Ve
rific
atio
n de
circ
uits
Prof
. CIE
SIEL
SKI
Uni
v. M
assa
chus
sets
Am
hers
tU
SA20
00Te
st &
Fai
ble
Puis
sanc
ePr
of. F
IGU
ERAS
Joa
nU
PC -
Barc
elon
eEs
pagn
e19
99-2
000
Test
& F
aibl
e Pu
issa
nce
Prof
. TEI
XEIR
A Jo
anIN
ESC
Portu
gal
1999
-200
0Te
st &
Fai
ble
Puis
sanc
ePr
of. W
UN
DER
LIC
H H
ans-
J.U
niv.
Of S
tuttg
art
Alle
mag
ne20
00Te
st d
e fa
utes
de
reta
rdPr
of. D
AVID
Ren
éLA
G -
Gre
nobl
eFr
ance
1998
-200
1Te
st d
e C
ircui
ts R
econ
figur
able
sPr
of. F
IGU
ERAS
Joa
nU
PC -
Barc
elon
eEs
pagn
e19
96-2
001
Test
de
Circ
uits
Rec
onfig
urab
les
Prof
. ZO
RIA
N Y
erva
ntLo
gic-
Visi
onU
SA19
96-2
001
Test
de
Déf
auts
Prof
. IVA
NO
V An
dré
Uni
v. B
ritis
h C
olum
bia
Can
ada
1997
-199
9R
OB
Mac
hine
s pa
rallè
les
pour
l'us
inag
eTo
yoda
Japo
n19
91-2
001
Rob
ots
para
llèle
s ra
pide
sU
nive
rsité
de
Toho
kuJa
pon
1990
-200
1M
achi
nes
reco
nfig
urab
les
Uni
vers
ité d
u M
ichi
gan
USA
2000
-200
1R
obot
ique
sou
s-m
arin
eU
nive
rsité
Edi
nbur
gh
Ecos
se20
01R
obot
ique
sou
s-m
arin
eLa
bora
toire
Sac
lant
cen
Italie
2000
-200
1
203


Co
nfé
ren
ces
invi
tées
No
mC
on
fére
nce
Lieu
D
ate
AR
CC
erri
S A
Col
loqu
e Ag
ents
logi
ciel
s, C
oopé
ratio
n, A
ppre
ntis
sage
et A
ctiv
ité H
umai
ne "L
anga
ges
pour
l'in
tera
ctio
n en
tre
agen
ts :
Etap
es v
ers
C+C
"U
nive
rsité
de
Pau
- Bi
arrit
zoc
t-00
Cer
ri S
ASé
min
aire
OAS
IS :
Obj
ets
et A
gent
s po
ur S
I et S
imul
atio
n - T
he c
ompu
ter i
s th
e W
eb :
Cha
lleng
es fo
r Web
pr
ogra
mm
ing
LIP6
- U
nive
rsité
Pie
rre e
t M
arie
Cur
ieav
r-00
Ferb
er J
Ecol
e de
s te
chni
ques
ava
ncée
s de
Tun
isTu
nisi
eju
in-0
1Fe
rber
Jco
nfér
ence
MAA
MAW
avr-0
1Fe
rber
Jco
nfér
ence
Age
nt W
ork
98ju
il-98
Nan
ard
JC
ERN
- ex
perti
se W
S in
tern
atio
nal
1998
Nan
ard
MC
onfé
renc
e - U
nive
rsité
Jua
n C
arlo
s M
adrid
- Es
pagn
em
ai-0
1N
anar
d M
et J
SIM
OS
- inv
ités
au ré
seau
d'e
xcel
lenc
eVi
enne
19
99N
anar
d M
et J
EPFL
Lau
sann
eLa
usan
ne S
uiss
e19
99Po
ns J
-FG
estio
n co
opér
ativ
e de
doc
umen
ts m
ultim
édia
stru
ctur
és -
Uni
vers
ité d
e Ta
basc
o - U
JAT,
Villa
herm
osa
Mex
ique
2000
Qui
nque
ton
JEm
erge
nce
and
Poss
ible
Wor
lds
Sem
antic
s fo
r Lea
rned
Age
nts.
Con
fere
nce
"The
Age
nt D
ay"
Cra
covi
em
ars-
99 /
00Sa
llant
in J
ALC
AA 2
001
Biar
ritz
- Fra
nce
sept
-01
Salla
ntin
JC
AP 2
000
Cae
n - F
ranc
eju
in-0
0Sa
llant
in J
FIPA
à l'
Impe
rial C
olle
geU
K20
01Sa
llant
in J
Impé
rial C
ollè
geU
K19
99IF
ABe
ssiè
re C
CP'
99W
ashi
ngto
n G
ascu
el O
22nd
Con
fere
nce
of th
e G
esel
lsch
aft f
ür C
lass
ifica
tion
: "Ad
ditiv
e tre
es a
nd D
ata
mod
el, A
pplic
atio
n to
ph
ylog
eny
Rec
onst
ruct
ion"
Des
den
mar
s-98
Gas
cuel
O7t
h C
ongr
ess
of E
volu
tiona
ry B
iolo
gy :
"Abo
ut th
e BI
ON
J al
gorit
hm :
prin
cipl
e, to
polo
gica
l acc
urac
y an
d sh
ape
effe
ct"
Barc
elon
e - E
spag
neao
ût-9
9
Gas
cuel
O7t
h co
nfer
ence
of t
he In
tern
atio
nal F
eder
atio
n of
Cla
ssifi
catio
n So
ciet
ies
: "D
ata
mod
el a
nd c
lass
ifica
tion
by
trees
" N
amur
juil-
00
Gas
cuel
OSh
owca
se fo
r Com
petin
g Te
chno
logi
es fo
r Phy
loge
netic
s "D
ista
nce
base
d m
etho
ds"
Mon
tréal
avr-0
1H
abib
MIn
vité
pou
r une
sem
aine
sur
les
algo
rithm
es d
e dé
com
posi
tion
dans
les
grap
hes
Dag
stuh
lju
in-9
9H
abib
M8i
èmes
jour
nées
du
grou
pe M
ode
de la
SM
AI (M
athé
mat
ique
s Ap
pliq
uées
)To
ulou
sem
ars-
00H
abib
MFi
elds
Inst
itute
- th
ème
: "St
ruct
ured
fam
ilies
of g
raph
s"To
ront
om
ai-0
0H
abib
M2è
mes
Jou
rnée
s d'
Info
rmat
ique
Met
zien
nes
(JIM
)m
ai-0
1H
abib
MBr
azilia
n Su
mm
er S
choo
l on
Com
bina
toric
s an
d Al
gorit
hms
Brés
ilm
ars-
01H
abib
MR
otsc
hild
Inst
itute
- Tr
ansi
tive
orie
ntat
ion
algo
rithm
s, a
pplic
atio
ns a
nd g
ener
aliz
atio
nsIs
raël
avr-0
1R
ival
s E
Algo
rithm
e po
ur la
rech
erch
e de
sim
ilarit
és d
ans
le c
as d
e re
quêt
es m
ultip
les.
App
licat
ion
au c
lust
erin
g d'
ESTs
" - J
ourn
ées
Algo
rithm
ique
et B
iolo
gie.
Paris
déc-
98
205
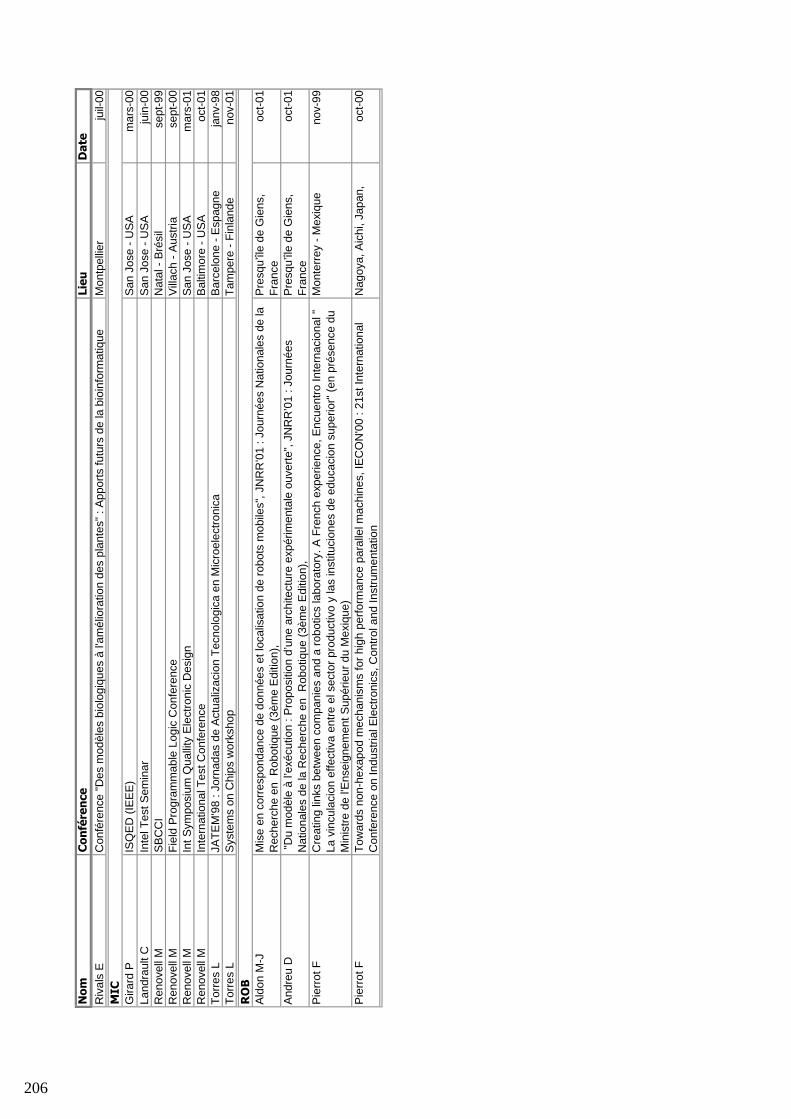
No
mC
on
fére
nce
Lieu
D
ate
Riv
als
EC
onfé
renc
e "D
es m
odèl
es b
iolo
giqu
es à
l'am
élio
ratio
n de
s pl
ante
s" :
Appo
rts fu
turs
de
la b
ioin
form
atiq
ueM
ontp
ellie
rju
il-00
MIC
Gira
rd P
ISQ
ED (I
EEE)
San
Jose
- U
SAm
ars-
00La
ndra
ult C
Inte
l Tes
t Sem
inar
San
Jose
- U
SAju
in-0
0R
enov
ell M
SBC
CI
Nat
al -
Brés
ilse
pt-9
9R
enov
ell M
Fiel
d Pr
ogra
mm
able
Log
ic C
onfe
renc
eVi
llach
- Au
stria
sept
-00
Ren
ovel
l MIn
t Sym
posi
um Q
uallit
y El
ectro
nic
Des
ign
San
Jose
- U
SAm
ars-
01R
enov
ell M
Inte
rnat
iona
l Tes
t Con
fere
nce
Balti
mor
e - U
SAoc
t-01
Torre
s L
JATE
M'9
8 : J
orna
das
de A
ctua
lizac
ion
Tecn
olog
ica
en M
icro
elec
troni
ca
Barc
elon
e - E
spag
neja
nv-9
8To
rres
LSy
stem
s on
Chi
ps w
orks
hop
Tam
pere
- Fi
nlan
deno
v-01
RO
BAl
don
M-J
Mis
e en
cor
resp
onda
nce
de d
onné
es e
t loc
alis
atio
n de
robo
ts m
obile
s", J
NR
R’0
1 : J
ourn
ées
Nat
iona
les
de la
R
eche
rche
en
Rob
otiq
ue (3
ème
Editi
on),
Pres
qu’îl
e de
Gie
ns,
Fran
ceoc
t-01
Andr
eu D
"Du
mod
èle
à l’e
xécu
tion
: Pro
posi
tion
d’un
e ar
chite
ctur
e ex
périm
enta
le o
uver
te",
JNR
R’0
1 : J
ourn
ées
Nat
iona
les
de la
Rec
herc
he e
n R
obot
ique
(3èm
e Ed
ition
), Pr
esqu
’île
de G
iens
, Fr
ance
oct-0
1
Pier
rot F
Cre
atin
g lin
ks b
etw
een
com
pani
es a
nd a
robo
tics
labo
rato
ry. A
Fre
nch
expe
rienc
e, E
ncue
ntro
Inte
rnac
iona
l "
La v
incu
laci
on e
ffect
iva
entre
el s
ecto
r pro
duct
ivo
y la
s in
stitu
cion
es d
e ed
ucac
ion
supe
rior"
(en
prés
ence
du
Min
istre
de
l'Ens
eign
emen
t Sup
érie
ur d
u M
exiq
ue)
Mon
terre
y - M
exiq
ueno
v-99
Pier
rot F
Tow
ards
non
-hex
apod
mec
hani
sms
for h
igh
perfo
rman
ce p
aral
lel m
achi
nes,
IEC
ON
'00
: 21s
t Int
erna
tiona
l C
onfe
renc
e on
Indu
stria
l Ele
ctro
nics
, Con
trol a
nd In
stru
men
tatio
nN
agoy
a, A
ichi
, Jap
an,
oct-0
0
206

Invi
tés
étra
ng
ers
accu
eill
is a
u L
IRM
M d
ura
nt
la p
ério
de
19
98
-20
01
No
mti
tre
Ap
par
ten
ance
Ori
gin
e g
éog
rap
hiq
ue
Séj
ou
rA
RC
KIN
G P
.Pr
ofU
nive
rsity
of M
anito
baC
anad
a14
moi
sZA
HAR
IN Y
.Pr
ofU
nive
rsité
des
Sci
ence
s de
Mal
aisi
eM
alai
sie
1 se
mai
neFE
RN
IDA
MC
Uni
v. c
atho
lique
de
Bras
iliaBr
ésil
2 m
ois
CH
RIS
TMAN
N.
Prof
Uni
v. d
e Se
attle
USA
2 se
mai
nes
IFA
BRYA
NT
Dav
idPo
st-D
ocBi
omat
hem
atic
s R
esea
rch
Cen
ter,
Uni
vers
ité o
f Can
terb
ury
Nou
velle
-Zél
ande
18 m
ois
McK
ENZI
E An
drew
Post
-Doc
Uni
vers
ité o
f Can
terb
ury
Nou
velle
-Zél
ande
14 m
ois
DES
PER
Ric
hard
Dr
Nat
iona
l Cen
ter f
or B
iote
chno
logy
Info
rmat
ion,
Was
hing
ton
USA
1 se
mai
neR
AHM
ANN
Sve
nD
rM
ax P
lanc
k In
stitu
te fu
r Mol
ekul
ar G
enet
ik, B
erlin
Alle
mag
ne1
sem
aine
MU
LLER
Tob
ias
Dr
Max
Pla
nck
Inst
itute
fur M
olek
ular
Gen
etik
, Ber
linAl
lem
agne
1 se
mai
neM
ESEG
UER
Ped
roIII
A-C
SIC
, Bel
late
rraEs
pagn
eLA
RR
OSA
Jav
ier
UPC
Bar
celo
naEs
pagn
eM
ICBA
GLI
O S
alva
tore
MdC
Uni
vers
ité d
e C
atan
iaIta
lie2
moi
sO
RAI
LOG
LU A
lex
Prof
Uni
vers
ité C
alifo
rnie
San
Die
goU
SA2
moi
sC
IESI
ELSK
I Mac
iej
Prof
Uni
vers
ité M
assa
chus
sets
Am
hers
tU
SA10
moi
sW
UN
DER
LIC
H H
ans-
J.Pr
ofU
niv.
Of S
tuttg
art
Alle
mag
ne2
moi
sIV
ANO
V An
dré
Prof
Uni
v. O
f Brit
ish
Col
umbi
aC
anad
a2
moi
sC
HIU
SAN
O S
ilvia
Post
-Doc
Polit
echn
ico
de T
orin
oIta
lie1
moi
s
207


Act
ion
s d
e d
iffu
sio
n d
e la
cu
ltu
re s
cien
tifi
qu
e
Act
ion
Qu
iD
ate
AR
CN
ouve
lle e
ncyc
lopé
die
Did
erot
, PU
FSa
llant
in J
, Sz
czec
inia
rz J
Jno
v-99
Con
fére
nce
Inst
itut U
nive
rsita
ire d
e Fr
ance
(Mon
tpel
lier)
Salla
ntin
Jfé
vr-0
0C
NR
S - m
onta
ge d
e pr
ojet
. Con
fére
nce
(Par
is)
Salla
ntin
Jse
pt-0
0Le
con
cept
de
la p
reuv
e à
la lu
miè
re d
e l'in
tellig
ence
arti
ficie
lle. E
ncyc
lopé
die
ouvr
age
coll.
Gui
ffre
(trad
uit e
n ita
lien)
Salla
ntin
J20
00
IFA
Parti
cipa
tion
à l'é
cole
thém
atiq
ue d
u C
NR
S "T
raite
men
t de
l'info
rmat
ion
en
géné
tique
mol
écul
aire
" à A
snel
le s
ur M
erG
ascu
el O
nov-
98
Con
fére
nces
intro
duct
ives
à la
bio
info
rmat
ique
à l'
ENS
Lyon
, à l'
ENSA
M, à
l'E
NS
Cac
han,
EN
ST B
reta
gne…
Gas
cuel
O, R
ival
s E
1998
/200
1
Org
anis
atio
n de
l'éc
ole
thém
atiq
ue d
u C
NR
S "A
naly
se in
-silic
o de
s sé
quen
ces
géno
miq
ues"
à M
arse
illeR
ival
s E
juil-
00
Org
anis
atio
n de
l'éc
ole
thém
atiq
ue C
NR
S-IN
RIA
"Pro
téom
e" à
Mon
tpel
lier
Gas
cuel
Ooc
t-01
Form
atio
n à
la B
ioin
form
atiq
ue a
uprè
s du
Dép
arte
men
t Gen
eTro
p de
l'IR
DBe
rry V
, Pin
loch
e S,
R
ival
s E
nov-
01
CN
RS-
Info
tiré
à p
art,
"Le
bond
des
puc
es à
AD
N"
Gas
cuel
Odé
c-01
RO
BC
NR
S-In
fo, n
° 356
: "H
IPPO
CR
ATE,
un
robo
t ass
ista
nt m
édic
al"
mar
s-98
Actu
alité
s de
s Sc
ienc
es P
our l
'Ingé
nieu
r (Le
ttre
d'in
form
atio
n du
Dép
arte
men
t SP
I, C
NR
S), n
° 1, H
IPPO
CR
ATE,
un
robo
t aux
iliaire
méd
ical
sept
-98
Parti
cipa
tion
à un
déb
at té
lévi
sé s
ur la
cha
ine
FOR
UM
Pier
rot F
1999
et 2
000
Parti
cipa
tion
à l'é
mis
sion
"Rue
des
Ent
repr
eneu
rs",
Fran
ce In
ter :
"De
l'hom
o sa
pien
s au
robo
t sap
iens
"D
ombr
e E
oct-0
1
209