Poster Session 09 Aug, 2017 17:00~18:30 - AIMR, …...Poster Session 09 Aug, 2017 17:00~18:30 la...
29
Poster Session 09 Aug, 2017 17:00~18:30 1 P-14 @MastersThesis
Transcript of Poster Session 09 Aug, 2017 17:00~18:30 - AIMR, …...Poster Session 09 Aug, 2017 17:00~18:30 la...

Poster Session 09 Aug, 2017 17:00~18:30
1 P-14
@MastersThesis

Poster Session 09 Aug, 2017 17:00~18:30
la topologie robotique
Sanaa Madad
13 Mars 2016
Encadré par Mr.MAMOUNI
univerité HassanII Faculté des sciences Ainchock
2

TABLE DES MATIÈRES 3
Table des matières
I robotique 4
1 la robotique 4
2 Historique 5
3 Domaines d’applications 7
4 les états d’un système mécanique 9
5 Degré de liberté et types de robots 10
II les mathématiques et la robotique 13
6 la topologie robotique 14
7 L’espace de configurations 14
8 Espace de travail 15
9 Algorithmes de planification de mouvement : 15
10 La Complexité Topologique 17
11 TC(X) et le genre de Schwarz 17
12 TC(X) et la multiplicité 20
13 La complexité topologique relative 22
14 Cup-produit 24

4
Première partie
robotique
1 la robotique
la robotique : est la technologie qui consiste à concevoir, à construire,à employer, et à travailler avec des machine électro-mécanique qui peuvent être programmées pour ef- fectuer d’une façon autonome des taches bien précise . cette forme d’automation sert à effectuer des fonctions autrefois remplies par des humains-particulièrement difficiles , dangereuses, monotones,répétitives ou pénibles . Ainsi, des robots peuvent être sollicités pour remplacer les humains dans des situations potentiellement mortelles impliquant par exemple des contaminations nucléaires, des pro- duits chimiques corrosifs, ou des vapeurs toxiques. Il n’y a aucune tâche que les robots ne sauront un jour exécuter, de la plus fastidieuse à la plus méticuleuse, de la plus répétitive à la plus sophistiquée. Qui aurait pensé qu’un jour des enfants de dix ans pouvaient avoir tout le monde au bout de leurs mains grâce à un portable... Les véhicules sont devenus autonomes ; plus besoin de chauffeurs. Nous sommes arrivés au stade d’opérations chirurgicales robotisées. Les mines sont exploitées par des robots... Nous somme dans une période que je me permet de l’appeler robolution.
Un robot de police manipulant une bombe vivante par télécommande. (Spencer Grant. Collection
nationale/Photo Researchers, Inc. de société d’Audubon)

2 HISTORIQUE 5
2 Historique
Le mot Robot a été créé en 1921 par l’écrivain tchèque Karel Çapek, dans une de ses pièces de théâtre (R. U. R. [Rossum’s Universal Robots]), pour dénommer un androïde construit par un savant et capable d’accomplir tous les travaux normalement exécutés par un homme. Depuis , on imagine les robots comme des hommes mécaniques ou « androïdes » . Leonardo da Vinci a imaginé le robot, comme documenté par ses dessins, sous forme d’un chevalier mécanique avec la capacité de se reposer, d’onduler ses bras, et de dépla- cer sa mâchoire. En réalité, les manuscrits techniques de 300-400 AVANT JÉSUS CHRIST indiquent que les êtres humains avaient essayé de construire des machines qui effectue- raient des tâches prédéfinies avec un certain degré d’autonomie . La différence fondamentale entre automate et robot est simple : l’automate obéit à un programme préétabli , que ce soit de manière mécanique ou électrique, alors que le robot dispose de capteurs, qui par l’intermédiaire de son programme en fonction de l’environ- nement, décideront des actions à entreprendre. Le développement de la robotique moderne a été précipité par l’avènement de l’électricité de vapeur pendant la Révolution Industrielle. l’explosion de la consommation a conduit des ingénieurs à produire des machines automatiques pour accélérer la production,et pour faire des tâches que les humains ne pourraient pas faire éventuellement,et les remplacer dans des situations dangereuses. par exemple, L’horloger suisse Pierre Jacquet-Droz (1721-1790), et son fils Henri-Louis (1752-1791), ont conçu des poupées animées, appelées des automates, et des oiseaux mé- caniques pour promouvoir la vente de leurs : montres. Une poupée jouait de piano,en se balançant à temps avec la musique.
Puisque les robots ont été fabriqué pour répliquer le mouvement d’un humain tout en
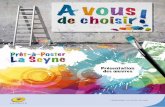
se soulevant, tirant, pressant, ou poussant ; alors la fabrication s’est basées sur les notions inspirées de l’anatomique et le mouvement d’un bras humain.on note comme exemple, « Position Controlling Apparatus, » par Willard V. Pollard, qui est un robot destiné à l’appli- cation de peinture sur la carrosserie d’une automobile. « Unimate, » Ce robot a été utilisé pour assister une machine à coulée par injection. En 1969, Unimation installe 26 robots soudeurs sur une ligne d’assemblage de Chevrolet Vega, chez General Motors (figure 1.5b).
Figure 1.5 - la première ligne robotisée qui consiste en 26 robots soudeurs Unimate
Unimate est devenu une caractéristique populaire des chaînes de montage. Aujourd’hui,il

2 HISTORIQUE 6
y a approximativement huit modèles d’Unimate disponibles, Ils ont été adaptés à des ap- plications telles que la manipulation matérielle, soudage par points, moulage mécanique sous pression, et machine-outil chargeant, avec un taux de abilité de 98 pour cent. Pendant 1975-76, la NASA a employé une conguration différente de bras robotique dans la mission de Viking à Mars. En prenant en considération les conditions environnementaux extrêmes de Mars. les bras industriels lourds et joints ont été remplacés par des bras faits de deux légers suppléments rubanés roulés sur un tambour. Les deux moitiés déferlées et reliées, créent un tube aux échantillons de scoop provenant de la surface de la planète. les opérateurs sur terre pouvaient guider le robot et appliquer une procédure de réparation à distance. ce-ci a rendu les chercheurs plus optimistes par rapport au sujet du contrôle telerobotics-humain aérospatial à distance.
Dante II. This tethered, eight-legged walking robot, developed bythe Carnegie Mellon University
Field Robotics Center (with help from the National Aeronautics and Space Administration) to
explore hostile environments safely, successfullycollects data inside volcanic Mount Spurr, Alaska,
on 28 July1994. Carnegie Mellon University School of Computer Science
Le rêve de produire des machines capables de suivre des commandes et de fonctionner seules, en réalisant énormément d’opérations complexes, a créé un besoin d’une program- mation unique des robots. Quelques chercheurs ont stipulé que la meilleure manière de réaliser un tel besoin serait de trouver un système qui simule la manière avec laquelle l’être humain pense. Ainsi le domaine de l’intelligence articielle (AI) a pris un essor avec la construction robotique. Le terme «cybernétique » ; qui désigne l’étude des relations entre l’homme et intelligence de la machine a été proposé par Norbert Wiener (1894-1964). Bien que le sujet de l’esprit humain reste un controverse, les projets d’AI qui ont résulté de leur concepts sont devenus un facteur important pour le développement des robot. « les robots mobiles » un autre défi de la robotique. C’est un robot qui peut théoriquement fonctionner indépendamment des commandes. An d’avoir une telle capacité, ce robot doit pouvoir éviter les objets statiques et mobiles dans son entourage. « Shakey, » , est une version primitive d’un robot mobile de service. Il a été propulsé par deux roues motori- sées et deux pare-chocs de détection d’obstacle, lesquelles fonctionnent indépendamment, sans cibles de référence. Il est doué de protocoles de détection afin d’éviter les obstacles d’entourage. Les robots ne sont plus conceptualisés que pour le nettoyage des bureaux : ils sont employés pour tous les types de travaux, telle que des situations jugées dangereuses. Ainsi ils ont été utilisés pour le nettoyage de la centrale nucléaire de Chernobyl suite à une explosion radioactive importante en 1986 dans l’Union Soviétique. Un autre exemple serait celui de «Genghis» — ce robot a été conçu pour analyser le terrain en face, il était développé pour fonctionner dans les missions d’exploration planétaire. Ainsi La NASA pré-

3 DOMAINES D’APPLICATIONS 7
•
•
• •
• •
•
voit d’utiliser «Hermes», une plus petite version de Genghis, pour explorer la surface de Mars. Le Japon, considéré le leader en développement des robots, développe les robots dit an- droïde pour utilisation dans les hôpitaux, à la maison et ainsi en tant que fonctionnaires aux centres urbains. En 1986 Honda Motor Company avait réalisé (P-1) désignant « co- existez et coopérez avec des êtres humains» de tels robots seraient utilisés dans la vie quotidienne pour servir les humains. Le (P-3) a vu le jour aussi, un robot qui ressemble à un astronaute, Il est équipé d’un sac à dos avec une batterie de 136 volts, un récepteur sans l, et une unité de traitement. les commandes sont transmises par un diffuseur sans l d’Ethernet. Selon Honda, le système de p-3 peut détecter et identifier les objets dans une pièce (ex :escaliers dans une chambre), marcher vers le haut des escaliers et se réstabiliser s’il perd son équilibre. Les chercheurs japonais travaillent énormément afin de réaliser le défi de simuler l’esprit humain. « Fumio Hara », une équipe de chercheurs à l’université de la Science à Tokyo, travaillent sur un « robot de visage » industriel. Ce robot doit être capable d’identifier des douzaines d’expressions humaines et imiter les gestes faciaux lui- même. Récemment, le robot de visage a été équipé d’une peau, des cheveux et des yeux simulés ; exemple : robots Sophia et Einstein.
3 Domaines d’applications
En fait, la robotique industrielle a émergé autour de la moitié du 20ème siècle. Après, c’est grâce aux équipes de recherche et développement, que les robots ont été intégrés graduellement dans la production industrielle, militaire, de l’aéronautique, de l’espace, du médical. . . etc. De plus en plus les robots semblent pouvoir infiltrer tous les aspects de la vie quotidienne.
la robotique industrielle :Selon la définition des normes internationales ISO 8373, un robot industriel est un : « manipulateur multi-application reprogrammable commandé automatiquement, programmable sur trois axes ou plus, qui peut mobile ou être xé sur place, destiné à être utilisé dans des applications d’automatisation industrielle ». Selon cette même caractérisation, un manipulateur serait : « une machine dont le mécanisme est généralement composé d’une série de segments, articulés ou coulissants l’un par rap- port à l’autre, ayant pour but de saisir et/ou de déplacer des objets (pièces ou outils) généralement suivant plusieurs degrés de liberté ». La partie extrême du manipulateur qui porte l’outil (préhenseur, pince de soudage, etc.) est nommée ainsi l’effecteur du robot. L’industrie automobile représente toujours le plus grand marché d’application de cette technologie, avec 40 types d’applications des plus communes. L’ABB recense ainsi le soudage à l’arc, le soudage par point, la manutention, le chargement/déchargement de machines-outils, la mise en peinture, le transfert de pièces (palettisation, emboitage, etc.), l’assemblage, l’enlèvement de matière (ébavurage, polissage, etc.) et l’application de colle ou de scellant.
la robotique domestique :ce sont des robots de service personnel utilisé pour réaliser
certaines tâches ménagères ; type : vaisselle, repassage, nettoyages et également dans le domaine de la restauration. Je mets ici les types de taches et ainsi les noms des robots dé-
veloppés pour répondre à ces besoins Aspiration : robo Maxx,koolvac,Mamirobot,Ottoto. balayage et essuyage : Braava de irobot, Mint clean de evolution Robotics. Lavage :
Scooba de irobot. Surveillance : Rovio de WowWee. la robotique médicale :est un système utilisé dans certains aspects de la prise en charge
thérapeutique, surtout la chirurgie ou au cours des programmes de réhabilitation neuro-

3 DOMAINES D’APPLICATIONS 8
•
•
•
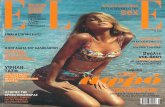
motrice, d’autre champs d’application sont de plus en plus envahis, entre autre la radiolo- gie, l’électrophysiologie...etc. Du fait des contraintes posées en matière de sécurité, ce type de robotique est en général doté d’un faible niveau d’autonomie. Le robot le plus utilisé aux États-Unis et en Europe est « Da Vinci ». « Da Vinci » est utilisé pour diverses opéra- tions chirurgicales qui sont dites mini-invasives dans les cavités abdominale et thoracique des patients. Son application principale est la chirurgie de la prostate. le CYBERKNIFE, il sert à détruire des tumeurs de manière non-invasive, il repère l’emplacement de la tumeur et la cible en continu pendant l’intervention.
(a) (b)
Figure- La robotique industrielle dans les hôpitaux : (a) un système développé par KUKA et
Siemens Healthcare ; (b) un système pour le remplissage de seringues développé par Health
Robotics
Certains robots ne sont pas utilisés directement pour assister le geste chirurgical lui-même, mais sont dédiés pour des tâches annexes dans la salle d’opération. C’est le cas des sys- tèmes « Artis Zeego » qui permet de déplacer le plan d’imagerie d’un système de uoroscopie d’une opération en temps réel. D’autre part, les Robots utilisés pour la rééducation des pa- tients. C’est le cas par exemple des systèmes Lokomat et In-motion, qui assistent le travail de réhabilitation du patient en fournissant une aide robotisée. Cependant l’équipement actuel est très couteux de ce fait la robotique médicale est trop peu utilisé .
la robotique militaire :sont des robots autonomes ou contrôlé à distance, conçu pour
des applications militaires. Les drones qui sont généralement téléguidés représente actuel- lement un ensemble intéressant de systèmes utilisés par les forces armés tel que le drone "Pretador",qui est capable de prendre des photographies de surveillance. Aussi Des engins au sol qui sont xes ( Ex : le samsung SGR-A1) ou mobiles, servent à la garde de sites sensibles tels que des silos à missile. Selon des prédictions de marché, le chiffre d’affaire est prévu d’être triplé entre 2015-2021.
la robotique scientifique : par exemple pour l’exploration de l’espace(aérobot), des fonds marins( robots sous-marins autonomes), dans les laboratoires d’analyse... etc.
la robotique de transport transport de personnes et de marchandises, par exemple ropits robot for personal intelligent transport system, robosoft, robocourier..etc.

4 LES ÉTATS D’UN SYSTÈME MÉCANIQUE 9
Exemples d’applications : marché de la fromagerie
4 les états d’un système mécanique
les mouvements qu’un robot peut exécuter sont réalisé exactement à l’aide d’un nombre fini de systèmes mécanique.Un de ces systèmes est connu sous le système de coordonnées cartésien ou système de cordonnées rectangulaire.Ce système se compose d’un ensemble de composantes qui peuvent se déplacer dans chacune des trois directions.Pensant à un système tridimensionnel dans lequel l’axe des x et l’axe des y définissent un plan plat, perpendiculairement à l’axe des z.alors la loi est de se déplacer le long de l’axe x, le long de l’axe y ou selon l’axe z.Donc chaque ensemble à la capacité de se déplacer dans trois directions différentes, de l’avant ou en arrière le long de l’axe x et y et de haut ou en bas le long de l’axe z.Un système de ce type est dit :à trois degrés de la liberté, parce qu’il a la capacité de se déplacer dans trois directions différentes.
Un autre état de système mécanique est le système de coordonnées cylindriques.Ce sys- tème se compose d’un cylindre avec une colonne solide à travers son milieu . Le cylindre peut se déplacer sur la colonne vers le haut et vers le bas (un degré de li- berté),et un bras fixé à l’extérieur du cylindre peut tourner autour de la colonne centrale (un second degré de liberté).finalement, le bras peut être construit de telle sorte qu’il glisse dans et à l’extérieur du cylindre(un troisième degré de liberté).
le troisième état de système mécanique est le système des cordonnées sphérique . Pour comprendre ce système, imaginant une composante en forme de boîte rectangulaire atta- chée à une base. La boîte peut tourner ( rotation)sur son propre axe (un degré de liberté) ou incliner vers le haut ou vers le bas sur son axe (un second degré de liberté).de plus si un bras fixé à la boîte peut également s’étendre ou se rétracter, alors on peut ajouter un troisième degré de liberté.
De nombreux robots ont plus de trois degrés de liberté, parce qu’ils se composent de deux ou plus de systèmes simplement combinés les uns aux autres.Par exemple, un robot typiquement industriel peut avoir un grand bras construit sur un système de coordonnées cartésien. Au extrémité du bras, on peut avoir un élément de type poignet sur le même système mécanique ou un autre . on Attache de plus a ce poignet une main avec des doigts,chacun

5 DEGRÉ DE LIBERTÉ ET TYPES DE ROBOTS 10
avec un système mécanique qui lui est propre.une telle Combinaisons de systèmes méca- niques permettre à un robot industriel d’effectuer une variété de constructions complexes pareille à celles d’un bras humain, le poignet, la main et le doigt...
5 Degré de liberté et types de robots
on s’intéresse aux bras robotisé ; l’élément mécanique principal pour les mouvements,multi- application programmable sur trois axes ou plus, dont le mécanisme est généralement composé d’une série de segments avec des liaisons .tout d’abord Une liaison entre deux segments est une relation de CONTACT entre ces deux segments .
on note que le nombre de mouvements( déplacement) élémentaires indépendants d’un solide (segment) par rapport a l’autre autorisés par cette liaison est Degrés de liberté d’une liaison . Degrés de liaison : C’est le nombre de déplacements élémentaires interdits. On notera que pour une liaison, la somme des degrés de liberté et des degrés de liaisons est égale à 6. donc ces segments articulés ou coulissants l’un par rapport à l’autre, ayant pour but de sai- sir et/ou de déplacer des objets (pièces ou outils) généralement suivant plusieurs degrés de liberté .
Dans l’espace tridimensionnel , un corps rigide libre peut se déplacer selon six degrés de libertés (ddl) : trois translations et trois rotations. On utilise le terme pose pour désigner la localisation du corps par rapport à un référentiel. Une pose est composée d’une position et d’une orientation.

5 DEGRÉ DE LIBERTÉ ET TYPES DE ROBOTS 11
(a) (b)
Figure 1.1 - Robots anthropomorphiques à six et cinq ddl : (a) robot sériel à six articulations
KR 1000 1300 TITAN PA de KUKA et (b) robot sériel à cinq articulations KR 470 PA de KUKA.
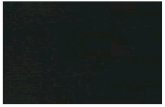
Pour placer un corps rigide n’importe où dans l’espace tridimensionnel, on a besoin d’un robot avec minimum six articulations motorisées, c.à.d. d’un robot à six ddl (figure 1.1a). La grande majorité de robots industriels sont de type sériel. Un robot sériel est composé d’une série de segments reliés par des articulations motorisées rotoîdes (en rotation) ou prismatiques (en translation). Dans certaines applications, on n’a pas besoin de dépla- cer les objets selon six ddl mais seulement selon cinq ou même quatre ou trois ddl. Par exemple la figure 1.1b illustre un robot sériel à cinq ddl utilisé pour la palettisation.
(a) (b)
(c) (d)
Figure 1.2 - Robots à quatre ddl : (a) robot de palettisation (de Fanuc), (b) robot parallèle (le
Quattro d’Adept Technology) , (c) robot cartésien (de Toshiba) et (d) robot SCARA (le TP80 de
Stâubli)
Le robot de la figure 1.2a est lui aussi utilisé pour la palettisation, mais il a seulement quatre ddl. Deux mécanismes parallélogrammes servent à restreindre deux des trois ddl en rotation de l’effecteur. Ces trois premiers robots sériels sont de type anthropomorphique. Dans un robot parallèle, l’effecteur est relié à la base via plusieurs « bras », et la plupart des articulations ne sont pas motorisées.
Les robots parallèles peuvent eux aussi avoir six, cinq, quatre, trois ou même deux ddl. Les

5 DEGRÉ DE LIBERTÉ ET TYPES DE ROBOTS 12
robots parallèles à six ddl les plus connus sont les hexapodes, comme ceux qui déplacent les cockpits des simulateurs de vol. Les robots parallèles sont généralement plus rigides et plus rapides que les robots sériels. En revanche, ils sont beaucoup plus difficiles à étudier et il en existe de milliers d’architectures différentes. La figure 1.2b illustre un des robots parallèles les plus rapides
(a) (b)
Figure 1.3 - Robots redondants à sept ddl : (a) le robot MR20 de Nachi et (b) un robot à six arti-
culations de KUKA monté sur un guide linéaire .
De retour aux robots sériels, le robot illustré à la figure 1.2c est un robot cartésien alors que le robot de la figure 1.2d est un robot SCARA. Ces trois derniers robots sont tous à quatre ddl (trois translations et une rotation autour d’un axe vertical) et servent à déplacer rapidement des petits objets.
Enfin, il existe aussi des robots à sept ddl (c.à.d. avec sept articulations motorisées) comme le robot illustré à la figure 1.3a , mais ils sont rarement utilisés. L’avantage d’un tel robot redondant est l’existence d’une infinité de possibilités pour atteindre une pose désirée, ce qui permet au robot de contourner des obstacles. Beaucoup plus souvent, on monte un robot à six articulations sur un guide linéaire (figure 1.3b) ou sur une table pivotante, ce qui résulte aussi en un système robotique redondant. Cependant, la raison principale n’est pas de contourner des obstacles mais d’augmenter l’espace de travail du robot (l’ensemble de poses que l’effecteur du robot peut atteindre). conclusion : on a différent type de Robots,Robot cartésien,Robot cylindrique,Robot sphé- rique ,Robot polaire,SCARA robot,Robot articulé et Robot parallèle. Exemple Degrés de liberté d’un drone : un concept hybride drone/projectile appelé Gun Launched Micro Air Vehicle (GLMAV).

13
·
· ·
·
·
·
·
Sachant que le GLMAV est considéré comme un corps rigide à masse fixe m, le modèle gé- nérique à six Degrés De Liberté (6-DDL) fait référence à ses trois translations et à ses trois rotations spatiales. Il décrit donc la dynamique et la cinématique de rotation et de trans- lation dans le repère lié au corps.
Deuxième partie
les mathématiques et la robotique
la Topologie et la robotique : l’interaction avec des mathématiciens peut ne pas donner les outils précis nécessaires pour résoudre un problème robotique donné. Cependant, il est presque certain que l’interaction va changer les perspectives que les chercheurs de la robotique apportent à la table. les Ma- thématiques affectera la question autant que la réponse. Chacun des disciplines possède une ou plusieurs caractéristiques naturelles de pertinence immédiate pour résoudre des problèmes du monde réel : la Topologie est implicitement robuste et globale ; la topologie dynamique aux concepts de la stabilité et de l’attraction ; La géométrie est parfaitement adapté pour répondre à des questions sur l’efficacité et les coordonnées.
Les idées et les outils suivants ont un potentiel pour être utile dans la recherche en ro- botique.
Chemin/espaces des lacets est l’outil de la théorie de l’homotopie relative devrait être utile dans l’analyse C-espace
Théorie de Mors dans toutes ses diverses permutations : Morse et la théorie de Morse stratifié sont déjà d’usage dans l’analyse C-espace dans une
mesure limitée. Un objectif est d’accroître l’utilité de ces sujets puissants. théorie Conley-Morse se révèle être de plus en plus utile dans les applications dyna-
miques. Peut-être existe des problèmes dans la robotique pour lesquelles ces techniques seraient utilisé.
la théorie géométrique des groupes et de la technologie de l’espace non-courbure positive peut généralisée la géométrie hyperbolique des groupes et des espaces métriques. ces idées Peuvent aider dans les problèmes C-espace et les problèmes de planification de chemin.ainsi les groupes automatiques devraient être utiles dans la manipulation et la planification.
Topologie différentielle Combinatoire : Il y a des notions précises d’objets différen-
tiels (champs de vecteurs, fonctions de Morse, formes différentielles) pour complexes cel- lulaire combinatoires. Ceux-ci sont par nature bien adapté pour calculer l’instant capturer en précisant la topologie (homologie / cohomologie ) d’un complexe. Cela peut être une méthode pour l’utilisation de techniques différentielle tout en stockant toutes les données combinatoirement.
Homologie de Computation : Plusieurs groupes travaillent sur des algorithmes rapides pour calculer une homologie des applications sur des complexes simpliciaux. Celles-ci ont marchent pour des dimensions relativement élevées, ou, au moins, en temps réel pour les basses dimensions. Ces outils devraient certainement être utiles à des problèmes de vision (par exemple, vérifier la connectivité ou des changements dans la structure globale, occlu- sions de détection, etc.)

6 LA TOPOLOGIE ROBOTIQUE 14
6 la topologie robotique
on peut dire que le point commun entre la robotique et la topologie c’est exactement la notion d’espace de configuration. Tout système mécanique R détermine la variété de tous ses états possibles X qui est appelé l’espace de configuration de R. Habituellement un état du système est entièrement déterminée par un nombre fini de paramètres réels ; dans ce cas, l’espace de configuration X peut être considéré comme un sous-ensemble de
l’espace euclidien Rk. Chaque point de X représente un état du système et différents points représentent diffèrent États . on peut comprendre Les espaces de configuration X a partir
de la topologie naturelle (Hérité de Rk) qui reflète les limites techniques du système. De nombreux problèmes de la théorie du contrôle peuvent être résolus grâce a la connais- sance de l’espace de configuration du système. Les particularités du comportement du système peuvent être souvent expliqué par les propriétés topologiques de la configuration de l’espace du système.
7 L’espace de configurations
Définition : L’espace de configurations (introduit par Lozarno-Perez au début des années 1980), noté X dans la suite, est l’ensemble de toutes les positions qu’un système mécanique peut prendre. c’est un ensemble de paramètre précisant de façon unique la position et l’orientation de chaque corps performant le système robotisé par rapport à un repère fixe.
Exemple :
Schématiquement, le bras de robot se compose de plusieurs barres reliées par des points de révolution On distingue le cas spatiale et le cas planaire
L’espace de configuration dans cet exemple est X = S1 × S1 × · · · × S1dans le cas planaire, et il est X = S2 × S2 × · · · × S2 dans le cas spatiale.
Remarque : Les espaces de configurations des systèmes mécaniques apparaissant dans la plupart des applications en industrie sont des ensembles semi-algébriques.on peut supposer que l’es- pace de configuration X est homéomorphe à un polyèdre. Espace de configuration des graphes

→
→
8 ESPACE DE TRAVAIL 15
8 Espace de travail
l’ensemble de poses que l’effecteur du robot peut atteindre est appelé l’espace de tra- vail.L’enveloppe de travail d’un robot sériel avec des articulations rotoides est définie par les longueurs des segments, la disposition des axes des articulations, les limites des articu- lations et les interférences mécaniques entre les différents segments.donc en supprimant de l’espace de configuration tous les obstacle ( obstacle qui existent dans l’espace de confi- guration : c’est la où le robot ne doit pas passer) on déduit cet espace de travail.La figure suivante montre une section verticale de ce qu’on appelle souvent l’enveloppe de travail du robot IRB 1600. Il s’agit simplement de la zone atteignable par le centre du poignet du robot (le point d’intersection des axes des trois dernières articulations).
9 Algorithmes de planification de mouvement :
Soit X l’espace de configurations d’un système mécanique, les états du système sont représentés par les points de X, et les mouvements continus du système sont représentés
par des chemins continues γ : [0, 1] X. Ici le point A = γ(0) représente l’état initial et γ(1) = B représente l’état final du système. L’espace X est connexe par arcs si et seulement si le système peut atteindre par un mou- vement continue n’importe quel état à partir d’un état donné.On s’intéresse maintenant au algorithmes produisons quelques mouvements on note par P X = XI l’espace des chemins continues γ : [0, 1] X ; l’espace P X est
muni de la topologie Compact-ouverte . Rappelons la définition de la topologie compacte-ouverte.
Définition :
Soient X et Y deux espaces topologiques, la topologie compacte-ouverte est une topolo-
gie définie sur l’ensemble des fonctions continues C(X, Y ) qui possède comme sous base l’ensemble Bt = {V (K, U ) | K un compact et U un ouvert },où V (K, U ) = {f ∈ C(X, Y ) |
f (K) ⊂ U }. Soit π : P X −→ X × X la fibration qui associe à un chemin γ
le couple (γ(0), γ(1)) ∈ X × X de l’initial-final positions.
Définition :
l’algorithme de planification des mouvements est une application (pas nécessairement continue) s : X × X −→ P X tel que π ◦ s = IdX×X .

9 ALGORITHMES DE PLANIFICATION DE MOUVEMENT : 16
× −→
× −→
−→ × −→ −→
Remarque : Un algorithme de planification de mouvement s : X X P X est continue si l’itiné- raire suggéré s(A, B) d’aller de A vers B dépend continument des positions A et B.
lemme : L’algorithme de planification de mouvement est continue si et seulement si
l’espace X est contractile
Preuve :
Supposons qu’il existe un algorithme de planification de mouvement continue
s : X × X −→ P X
Pour A et B dans X, l’image s(A, B) est un chemin de A vers B.
Soient B = B0 ∈ X fixé et F : X × [0, 1] −→ X définie par F (x, t) = s(x, B0)(t),
F : X × [0, 1] −→ X est une déformation continue avec F (x, 0) = x et F (x, 1) = B0 pour tout x ∈ X, donc X est contractile.
Inversement, supposons que X est contractile ; donc il existe une homotopie continue F : X [0, 1] X entre l’application identité Id : X X et l’application constante
x B0 définie sur X
Soit s : X X P X une section définie par s(A, B) = F (A, t).F (B, t) avec F (A, t) un chemin de A vers B0, et F (B, t) le chemin inverse d’un chemin de B vers B0 ; or F est continu donc s définie un algorithme de planification de mouvement continue dans X.
Corollaire : Pour un système avec un espace de configuration non contractile, n’im-
porte quel algorithme de planification de mouvement peut être discontinue.
Définition : Soit X un polyèdre, Un algorithme de planification de mouvement s :
X × X −→ P X est dit "docile" si X × X peut être partitionner en ensembles finis
X × X = F1 ∪ F2 ∪ ... ∪ Fk tels que :
La restriction s/Fi : Fi −→ P X est continue, i = 1, ...., k ;
Fi ∩ Fj = ∅, quand i j ;
Chaque Fi est un E.N.R.
Soit (A, B) ∈ Fi une paire fixée de points , le chemin t I→ s(A, B)(t) ∈ X, produit
par l’algorithme s(A, B), est continue, il commence à A ∈ X et se termine en B ∈ X. La courbe s(A, B) dépend continument de (A, B), avec (A, B) varie dans l’ensemble Fi ⊂ X.

10 LA COMPLEXITÉ TOPOLOGIQUE 17
∪ ∪ ∪
×
∈
−→
Les algorithmes de Planification de mouvement qui apparaissent dans les applications in- dustrielles sont ceux qui sont dociles. Comme nous l’avons mentionné au début, l’espace de configurations est souvent un ensemble semi-algébrique, et l’algorithme est décrit par plusieurs lois associées aux différents scénarios Fj relatifs aux positions initiales-finales. Ces
ensembles sont donnés par des équations et des inégalités impliquant des fonctions algébriques réels.
10 La Complexité Topologique
Définition : (cas normalisé)
La complexité topologique de X, notée T C(X), est le plus petit entier n tel que X × X = U0
∪ · · · ∪ Un , et sur chaque Ui il existe une section locale si : Ui → P X avec π ◦ si = ji où ji : Ui → X × X est l’inclusion.
Définition : La Complexité topologique d’un algorithme de planification d’un mouvement docile est le nombre minimal de domaines de continuité Fj dans toute représentation de type X X = F1 F2 ... Fk pour s. La complexité topologique T C(X) d’un polyèdre X de dimension finie est la complexité topologique minimale des algorithmes de planification de mouvement dociles dans X.
Proposition :
T C(X) = 1 si et seulement si le polyèdre est contractile.
11 TC(X) et le genre de Schwarz
Définition :
Le genre de Schwarz d’une fibration p : E −→ B est défini comme étant le nombre mini- mal k tel qu’il existe un recouvrement ouvert de la base B = U1 ∪ U2 ∪ .... ∪ Uk ayant la propriété suivante : pour tout j = 1, 2, ..., k il existe une section continue sj : Uj −→ E de p : E −→ B.
Définition :
La catégorie deLusternik-Schnirelmann, noté ❝❛+✭❳✮, est défini comme le plus petit entier k tel que X admet un recouvrement ouvert X = U1 ∪ U2 ∪ ... ∪ Uk ayant la propriété
suivante : chaque injection Ui −→ X est homotopiquement nulle (c’est à dire elle est ho-
motope à une application constante c : Ui −→ {x0} ⊂ X).
Remarque : La notion du genre de Schwarz d’une fibration généralise la notion de ❝❛+✭❳✮, celui-ci coïncide avec le genre de la fibration de Serre P0X X ; Ici P0X est l’espace de tous les chemins dans X qui commence du point base x0 X. En effet Cette proposition donne une interprétation similaire de T C(X) :
Proposition :
Soit X un polyèdre, le nombre T C(X) coincïde avec le genre de Schwarz de la fibration de Serre π : P X −→ X × X.

11 TC(X) ET LE GENRE DE SCHWARZ 18
I
{ ∈ } ∩ ∩
× ∪ ∪ ∪
0
1
◦
τ ∈ ×
1
∪ ∪ ∪ × ≤ ≤
× \ ∪ ∪ × \
⊂
τ
Dans la preuve on aura besoin du lemme suivant : lemme Soient Y, Z ⊂ P deux parties fermées disjointes d’un polyèdre P . Alors il existe un sous- polyèdre fermé F ⊂ P contenant Y et disjoint de Z, c’est à dire Y ⊂ F et F ∩ Z = ∅.
Preuve du Lemme :
Soit {Pα ⊂ P/α ∈ A} une famille localement finie des sous polyèdres finis de P tels que
Pα = P α
∀α ∈ A on a : (Y ∩ Pα) ∩ (Z ∩ Pα) = ∅ et Y ∩ Pα, Z ∩ Pα sont compactes, car ce sont des
parties finies dans un espace métrique (P est munie de la topologie induite sur Rn com-
patible avec la distance usuelle) donc on peut trouver une suite de nombres réels Eα > 0 tel que dist(Y Pα, Z Pα) > Eα. Or Pα/α A est localement finie donc chaque élément de P possède un voisinage qui ne rencontre qu’un nombre fini de Pα d’où on peut subdiviser P de telle sorte que chaque simplexe lié à Pα soit de diamètre inférieur strictement à Eα. Soit F la réunion de tous les simplexes de P dont leurs fermetures intersectent Y (donc forcément ils n’intersectent pas Z).
Alors F ∩ Z = ∅ et Y ⊂ F .
Preuve de la proposition : On note par g le genre de Schwarz de π et par k le nombre T C(X). Considérons une par- tition X X = F1 F2 ... Fk comme dans la définition de T C(X). On montre qu’on peut élargir chaque Fi en une partie ouverte Ui qui possède une section continue de π. Ceci implique l’inégalité g ≤ k. Pour tout i = 1, ..., k les parties Fi et X × X sont des E.N.Rs ; Donc d’après la proposition
il existe un voisinage ouvert Ui ⊂ X × X de l’ensemble Fi et une homotopie continue i : Ui −→ X × X, avec τ ∈ [0, 1] de sorte que hi : Ui −→ X × X est noté l’inclusion et
hi : Ui −→ X × X une rétraction de Ui dans Fi.
On peut maintenant définir une application continue sti ayant la propriété π st
i = 1Ui
par :
Étant donné une paire (A, B) Ui, le chemin hi (A, B) dans X X est un couple de chemins (γ, δ), avec γ un chemin dans X du point γ(0) = A au point γ(1), et δ un chemin dans X du point δ(0) = B au point δ(1). Il est facile de voir que le couple (γ(1), δ(1))
appartient à Fi car hi est une rétraction de plus la section si = s/Fi : Fi −→ P X définie un chemin ξ = si(γ(1), δ(1)) ∈ P X joignant les points γ(1) et δ(1). Maintenant on prend
sti(A, B) la concaténation de γ, ξ et δ−1 (chemin inverse de δ)
sti(A, B) = γ.ξ.δ−1
d’où g k. D’autre part on montre que k g. Supposons qu’on a un recouvrement ouvert U1 U2 ... Ug = X X tel que chaque ensemble Ui admet une section continue de π, on montre que pour i = 1, ..., g on peut trouver des sous-ensembles Fi Ui satisfont les propriétés de la définition de T C(X), les ensemble Y1 = X X (U2 ... Ug ) et Z1 = X X U1 sont fermés et disjoints, donc d’après le Lemme précédent, on a l’existence d’un sous polyèdre fermé F1 qui contient Y1
et disjoint de Z1. On procède par récurrence. Supposons que pour 1 < i < g on a construit des ensembles
F1, F2, ..., Fi−1 ⊂ X × X satisfont les propriétés suivantes :
h

11 TC(X) ET LE GENRE DE SCHWARZ 19
⊂
≤
× \ ∪ ∪
1. Chaque Fj est un polyèdre inclus dans Uj .
2. Fj ∩ Fj1 = ∅ pour j /= jt.
3. La fermeture de chaque Fj est contenue dans la réunion F1 ∪ F2 ∪ ... ∪ Fj .
4. F1 ∪ F2 ∪ ... ∪ Fi−1 ∪ Ui ∪ ... ∪ Ug = X × X.
L’ensemble Pi = X X (F1 ... Fi−1) est un sous ensemble ouvert d’un polyèdre donc
c’est un polyèdre. Les ensembles
Yi = Pi\(Ui+1 ∪ ... ∪ Ug ) et Zi = Pi\Ui
sont disjoints et fermés dans Pi, donc d’après le Lemme précédent, il existe un sous- polyèdre fermé Fi Pi contenant Yi et disjoint de Zi, et qui vérifie les propriétés 1, 2, 3 et 4. D’où on trouve des sous ensembles F1, ..., Fg−1.
Et finalement on définie Fg = X × X\(F1 ∪ ... ∪ Fg−1), et on obtient une partitionne de
X × X = F1 ∪ ... ∪ Fg
satisfait les propriétés de la définition de T C(X).
Alors g k. 口
Cette proposition nous incite à poser la définition générale suivante :
Définition Soit X un espace topologique. Sa complexité topologique T C(X) est définie comme le
genre de Schwarz da la fibration π : P X −→ X × X.
Proposition Soit X un E.N.R. Alors T C(X) = k = l = r, dont les nombres k = k(X), l = l(X), r = r(X) sont définis comme suit :
1. k = k(X) l’entier minimal telle qu’elle existe une section s : X × X −→ P X de la
fibration π : P X −→ X × X, et une suite croissante de k sous ensembles ouverts
U1 ⊂ U2 ⊂ ... ⊂ Uk = X × X
ayant la propriété que pour tout i = 0, 1, ..., k − 1 la restriction s/(Ui+1 − Ui) est continue, ici U0 = ∅.
2. l = l(X) l’entier minimal telle qu’elle existe une section s : X × X −→ P X de la fibration π : P X −→ X × X, et une suite croissante de k sous ensembles fermés
F1 ⊂ F2 ⊂ ... ⊂ Fk = X × X
ayant la propriété que pour tout i = 0, 1, ..., k − 1 la restriction s/(Fi+1 − Fi) est continue, ici F0 = ∅

12 TC(X) ET LA MULTIPLICITÉ 20
≥ que .
⊂ ⊂ ⊂ × ≥
⊂ ∪ ∪ ∪ × ∪ ∪ ∪
× ×
τ 0 1
τ −→
⊂ ⊂
×
⊂ × ∩
⊂ ×
i∈J
µ(V ) V = {Vi}i∈I
3. r = r(X) l’entier minimal telle qu’elle existe une section s : X × X −→ P X de la fibration π : P X −→ X × X, et une partition
G1 ∪ G2 ∪ ... ∪ Gr = X × X; Gi ∩ Gj = ∅, pour i /= j
avec chaque Gi est un sous ensemble localement compact de X × X et chaque res- triction s/Gi : Gi −→ P X est continue, pour i = 1, ..., r.
Preuve :
Soient T C(X) = s et W1 ∪ W2 ∪ ... ∪ Ws = X × X un recouvrement ouvert tel que chaque ensemble Wi possède une section continue si : Wi −→ P X de la fibration π : P X −→ X × X. Considérons l’ensemble Ui = W1 ∪ W2 ∪ ... ∪ Wi avec i = 1, ..., s. On a U1 ⊂ U2 ⊂ ... ⊂ Us = X × X, soit s : X × X −→ P X la section définie par s(x, y) = si(x, y) où i est le plus petit indice tel que (x, y) ∈ Wi. Clairement on a Ui+1 − Ui = Wi+1 − (W1 ∪ W2 ∪ ... ∪ Wi) et la restriction s/(Ui+1 − Ui) est continue, ce qui montre
T C(X) = s k = k(X)
Supposons que s = T C(X) et W1, W2, ...., Ws sont définis comme précédemment. L’espace X X est normal (puisque X X est métrisable). Alors on peut trouver des parties fermées Vi Wi tel que V1 V2 ... Vs = X X. Posons Fi = V1 V2 ... Vi
(avec i = 1, ..., s) et en répète le raisonnement du paragraphe précédent et par suite on obtiendra l’inégalité T C(X) = s l = l(X).
Supposons que U1 U2 ... Ul = X X une chaine croissante de sous ensembles ouverts satisfont les conditions de l’assertion (1.). D’où les ensembles Gi = Ui − (U1 ∪ U2 ∪ ... ∪ Ui−1) sont localement fermés, forment un recouvrement fini de X × X et satisfont les conditions de l’assertion (3.). Ainsi k = k(X) ≥ r = r(X).
L’inégalité l ≥ r s’obtient de la même manière.
Finalement il reste à montrer que r = r(X) ≥ s = T C(X).
Supposons que G1 ∪ G2 ∪ ... ∪ Gr = X × X tel que les Gi soient des parties localement compactes, deux à deux disjointes, et chaque Gi admet une section continue si : Gi → P X
de π : P X −→ X × X ; une telle famille de ces sections est en bijection avec une famille
des homotopies continues hi : Gi −→ X tel que τ ∈ [0, 1] et hi , hi : Gi −→ X sont les projections de Gi X X dans la première et la seconde coordonnée respectivement. Soit Wi X X un sous ensemble ouvert tel que Gi = Gi Wi, un tel Wi existe puisque Gi est un sous ensemble localement compact donc localement fermé de X X. En utilisant la proposition 1.2.12, on trouve une partie ouverte Ui, telle que Gi Ui Wi,
et une homotopie Hi : Ui X liant les projections de Ui sur la première et la seconde coordonnée. Cette dernière homotopie peut s’interpréter comme une section continue Si : Ui −→ P X de π : P X −→ X × X. Ainsi on obtient un recouvrement ouvert U1, U2, ..., Ur de X × X tel que chaque ensemble
Ui admet une section continue de la fibration π : P X −→ X × X. D’où T C(X) = s ≤ r.
口
12 TC(X) et la multiplicité
Définition
La multiplicité d’un recouvrement est définie comme le cardinal maxi-
mal des sous ensembles J ⊂ I tel que l’intersection n
Vi est non vide.

12 TC(X) ET LA MULTIPLICITÉ 21
∈ ×
V { } −→ × ≤ V
× U ≤
U { }
−
I
Corollaire :
Soit X un E.N.R. Alors T C(X) coïncide avec la multiplicité minimale µ(V ) des recouvre- ments ouverts (ou fermés) V = {V1, V2, ..., Vm} de X ×X ayant la propriété que la fibration π : P X −→ X × X admet une section continue sur chaque ensemble Vi, avec i = 1, ..., m.
Preuve :
Supposons que T C(X) = k et = U1, U2, ..., Uk un recouvrement ouvert (ou fermé) de X X comme dans la définition de T C, alors µ( ) k = T C(X).
Montrons maintenant que T C(X) µ( ) pour tout recouvrement fermé (ou ouvert) = V1, V2, ..., Vm tel que la fibration π : P X X X admet une section continue
sur chaque ensemble Vi. Soit (x, y) X X, notons µ(x, y) le nombre d’ensembles Vi contenant (x, y). La multiplicité
µ(V ) = (
max x,y)∈X×
µ(x, y) X
En effet, il est clair que µ(V ) ≤ max(x,y)∈X×X µ(x, y), inversement supposons que max(x,y)∈X×X µ(x, y) =
µ(x0, y0) donc il existe J ⊂ {1, 2, ...., m} tel que (x0, y0) ∈ ∩i∈J Vi ; c’est à dire ∩i∈J Vi /= ∅. Donc µ(V ) ≥ µ(x0, y0).
Revenons maintenant à la preuve ; Pour i = 1, 2, ..., µ(V ) on considère
Wi = {(x, y) ∈ X × X/µ(x, y) ≥ µ(V ) − i + 1}
Chaque Wi est fermé (respectivement, ouvert) et on a
W1 ⊂ W2 ⊂ ... ⊂ Wµ(V) = X × X
De plus tout complément Wi+1 − Wi est une réunion disjointes de sous ensembles, chaque sous ensemble est situé dans l’un des ensembles Vj : (x, y) ∈ Wi+1 − Wi ⇐⇒ µ(x, y) = µ(V ) − i. Et par suite il existe une section continue de la fibration π : X × X :−→ P X sur tout
Wi+1 − Wi.
Alors d’après la proposition, T C(X) ≤ µ(V ). 口
Remarque : Le corollaire précédent est étroitement liée à la caractérisation de la complexité topolo- gique T C(X) en termes de degrés d’instabilité des algorithmes de planification de mou- vement du robot.
Corollaire : Si X est un polyèdre, alors
T C(X) ≤ 2 dim X + 1
Preuve : Soit X un polyèdre.
Notons X(r) = Xr Xr−1 la réunion des intérieurs de tous les simplexes de dimension r
avec r = 0, 1, ..., n. et dim X = n Considérons
Gi = r+s=i
X(r) × X(s), i = 0, 1, ..., 2n.

13 LA COMPLEXITÉ TOPOLOGIQUE RELATIVE 22
.
I
×
∈
∈ ∈
∈
r+1
≤
−→
{ − ∈ }
→ ∈
{ ∈ × / − }
Montrons que pour tout i = 0, 1, ..., 2n ; chaque Gi admet une section continue si : Gi −→
P X On a
Gi = r+s=i
∆(r) × ∆(s)
dont ∆(r), ∆(s) varient respectivement sur l’ensemble des simplexes de dimension r et s.
Donc une section continue si peut se décrire sur chaque composante connexe ∆(r) ∆(s)
de Gi séparément.
En effet étant donné ∆(r) et ∆(s), on considère un chemin γ allant d’un point x0 ∆(r)
vers un point y0 ∆(s) ; donc on peut aller d’un point x ∆(r) vers un point quelconque
y ∆(s) par le chemin composé du segment droite allant de x vers x0 dans ∆(r), du
chemin γ et du segment droite allant de y0 vers y dans ∆(s). Donc d’après la Proposition ,
T C(X) ≤ 2 dim X + 1
口
Théorème :
si X est un CW-complexe r-connexe alors T C(X) < 2.dimX+1 + 1
Preuve : See Farber (2004) for a proof.(urgent)
Planification de mouvement sur la sphère
1)Montrons que T C(Sn) = 2 si n est impair
Sn n’est pas contractile donc T C(Sn) ≥ 2.
Considérons F1 = (A, B) Sn Sn/A = B , on peut construire une section
s1 : F1 P Sn telle que pour tout couple (A, B) F1, s1(A, B) est le plus court arc al-
lons de A vers B ; et considérons maintenant l’ensemble F2 = (A, A)/A Sn on peut
construire une section continue s2 : F2 P Sn comme suit : on considère un champs de
vecteur tangent non nul v de Sn et s2(A, B) l’arc du cercle tangent au champ de vecteur v. Donc T C(Sn) = 2
2) Montrons que T C(Sn) 3 si n est pair. D’après le théorème de la boule chevelue, tout champ de vecteur continue sur la sphère
Sn s’annule au moins en un point, on choisit alors un champs de vecteurs qui s’annule
seulement en un seul point, noté A0, on défini F2 = {(A, −A)/A A0} et s2 : F2 → P Sn
de la même manière que précédemment ; l’ensemble F3 = {(A0, −A0)} et s3 : F3 −→ P Sn
tel que s3(A0, −A0) est un chemin continu quelconque entre A0 et −A0. Alors T C(Sn) ≤ 3.
Planification de mouvement d’un espace projectif urgent
13 La complexité topologique relative
Définition :
Soit X un espace topologique et A un sous espace de X ×X, le nombre T CX (A) est définie comme le genre de Schwartz de la fibration π : PAX −→ A , avec PAX ⊂ P X est l’espace de tous les chemins γ : [0, 1] −→ X tel que le couple des points d’extrémités(γ(0), γ(1))

13 LA COMPLEXITÉ TOPOLOGIQUE RELATIVE 23
1 2
⊂
est dans A.
En d’autre termes, T CX (A) est le plus petit entier naturel k tel qu’il existe un re- couvrement ouvert U1 ∪ U2 ∪ ... ∪ Uk = A ayant la propriété suivante : chaque Ui ⊂ A
est ouvert et les projections pri : Ui −→ X et pri : Ui −→ X définies respectivement par pri (x, y) = x et pri (x, y) = y, pour tout (x, y) ∈ Ui, sont homotopes pour tout i = 1, ..., k.
1 2
Remarque :
T CX (X × X) = T C(X)
lemme :
Soit A un sous ensemble de X × X, les propriétés suivantes sont équivalentes :
1. T CX (A) = 1.
2. Les deux projections pri et pri sont homotopes, pour tout i = 1, ..., k.
1 2
3. L’inclusion A −→ X × X est homotope à une application A −→ X × X à valeur dans le diagonale ∆X ⊂ X × X.
Définition : Soit A X. La catégorie de Lusternik-Schnirelman relative ❝❛+X (A) est le cardinal minimal d’un recouvrement ouvert de A tel que chaque élément du recouvrement est homotopiquement nulle dans X. Proposition :
Soient X et Y deux ouverts appartenant à X∪ alors :
cat(X ∪ Y ) ≤ cat(X) + cat(Y ) + 1.
Propriétés : voici quelques inégalités importantes :
T CX (A) ≤ T C(X)
et
Si A ⊂ B ⊂ X × X donc
Soit Y un sous espace de X, on a
T CX (A) ≤ catX×X (A)
T CX (A) ≤ T CX (B)
T CX (Y × Y ) ≤ T C(Y )
lemme : Soient A et B des sous ensemble de X × X tels que A ⊂ B ⊂ X × X et B peut se déforme à A (c-à-d, A et B ont même type d’homotopie) dans X × X. Donc
T CX (A) = T CX (B)

14 CUP-PRODUIT 24
1 2
∈
∪ ∪ ∪
1 2
≤ ≤
≤
≥
× ≤ × ×
Preuve :
Supposons que ht : B −→ X × X est une homotopie telle que h0 : B −→ X × X est l’inclusion et h1 : B −→ A une déformation. Soit k = T CX (A) et soit U1 ∪ U2 ∪ ... ∪ Uk = A
un recouvrement ouvert tel que les projections pri : Ui −→ X et pri : Ui −→ X sont homotopes, alors elle existe une homotopie si : Ui × I :−→ X avec si(a, b, 0) = a et
si(a, b, 1) = b pour (a, b) ∈ Ui.
Soit Wi = h−1
1(Ui) pour i = 1, ..., k. Comme h1 est une déformation donc W1 W2 ...
Wk = B est un recouvrement ouvert. Pour tout (x, y) Wi l’homotopie ht(x, y) peut se voir comme un couple de chemins (γ, σ) dans X allant de γ(0) = x et σ(0) = y et se terminent au couple (γ(1), σ(1)) = (a, b) dans Ui ⊂ A. le produit de chemins γ, si(a, b, .)
et σ−1 est un chemin entre x et y qui dépend continument de (x, y) ∈ Wi, ainsi c’est une homotopie entre les projections pri : Wi −→ X et pri : Wi −→ X.
Alors T CX (B) T CX (A). D’après la propriété précédente on a T CX (A) T CX (B), d’où l’égalité.
Corollaire : Supposons que Y ⊂ X tel que Y soit un rétracte par déformation de X. Alors
T C(X) = T C(Y )
Preuve :
On a T CX (Y Y ) T C(Y ) et d’après le Lemme on a T CX (Y Y ) = T CX (X X) =
T C(X) donc T C(Y ) T C(X).
De plus on a d’après le Lemme T C(Y ) T C(X). D’où T C(X) = T C(Y ).
Corollaire : La complexité topologique est un invariant homotopique. Autrement dit Si X et Y sont deux espaces topologiques ayant le même type d’homotopie alors T C(X) = T C(Y ).
Preuve :
Deux espaces topologiques ayant le même type d’homotopie sont des rétractions par dé- formation d’un seul espace topologique, donc le résultat s’obtient d’après le corollaire pré- cédent.
14 Cup-produit
Le cup-produit est une opération définie sur les groupes de cohomologie qui permet d’assembler des cocycles. Cette opération est graduée, associative et distributive, ce qui permet de définir l’anneau de cohomologie. Introduite à l’origine en cohomologie singu- lière, des constructions analogues existent pour différentes théories cohomologiques. Pour définir le cup-produit on considère la cohomologie à coefficient dans un anneau R, on prend souvent Z, Zn et Q.
Définition
Soient ϕ ∈ Ck(X, R) et ψ ∈ Cl(X, R), le cup-produit ϕ '-- ψ ∈ Ck+l(X, R) est une
cochaine tel que pour tout σ : ∆k+l −→ X on a
(ϕ '-- ψ)(σ) = ϕ(σ | [v0, ..., vk])ψ(σ | [vk, ..., vk+l])

14 CUP-PRODUIT 25
k
−→
' �
k ' �
ミ
±
±
∈
'-.
∗
dont le produit à droite est un produit dans R.
Pour voir que ce cup-produit de cochaines induit un cup-produit de classes de cohomolo- gie nous avons besoin d’une formule relative à l’application cobord. lemme :
δ(ϕ '-- ψ) = δϕ '-- ψ + (−1) ϕ '-- δψ
pour ϕ ∈ Ck(X, R) et ψ ∈ Cl(X, R)
Preuve :
Soit σ : ∆k+l+1 X
On a
k+1
(δϕ '-- ψ)(σ) = (−1)iϕ(σ | [v0, . . . , vi, . . . , vk+1])ψ(σ | [vk+1, . . . , vk+l+1]) i=0
(−1) (ϕ '-- δψ)(σ) = k+l+1
(−1)iϕ(σ | [v0, . . . , . . . , vk])ψ(σ | [vk, . . . , vi, . . . , vk+l+1]) i=k
Lorsqu’on somme ces deux expressions, le dernier terme de la première somme annule le premier terme de la seconde somme, et les termes restants sont exactement
δ(ϕ '-- ψ)(σ) = (ϕ '-- ψ)(∂σ)
k+l+1 puisque ∂σ = (−1)iσ | [v , . . . , v� .
Remarque :
i=0
0 i, . . . , vk+l+1]
口
D’après la formule δ(ϕ '-- ψ) = δϕ '-- ψ ϕ '-- δψ, il est évident que le cup-produit de deux cocyles est un cocycle. En outre, le cup-produit d’un cocycle et un cobord, dans n’importe quel ordre, est un cobord puisque δ(ϕ '-- ψ) = ϕ '-- δψ si δϕ = 0 et δ(ϕ '-- ψ) = δϕ '-- ψ si δψ = 0
Il s’ensuit qu’il existe un cup-produit induit
Hk(X; R) ⊗ Hl(X; R) −→ Hk+l(X; R)
qui est associatif et distributif puisque le cup-produit des cocycles est associatif et distri- butif. Remarque : Si R possède un élément neutre, alors il existe un élément neutre pour le cup-produit,
la classe 1 H0(X; R) définie par les 0-cocycles ayant la valeur 1 pour tout 0-simplexe singulier.
Définition :
u ∈ H∗(X × X; R) une classe de cohomologie, où R est un système de coefficient .
On dit que u possède le poids k ≥ 0 si k est le plus grand entier ayant la propriété suivante, pour tout sous ensemble ouvert A ⊂ X × X tel que T CX (A) ≤ k on a u | A = 0,
où u | A = i∗(u) et i∗
H (X × X, R) −→ H∗(A, R)
u I→ u | A

14 CUP-PRODUIT 26
∞
× ≤ ≤ | ×
∈ ×
× × ∈ ×
∈
'
ミ
(i : A −→ X × X est l’inclusion.)
On notera le poids de u par wgt(u).
Remarque :
1) Le poids de la classe zéro égale . 2) Connaissant le poids des classes de cohomologie peut être utile pour trouver des bornes inférieures pour la complexité topologique TC (X).
Proposition : S’il existe une classe de cohomologie non nulle u ∈ H∗(X × X; R) tel que
wgt(u) ≥ k, alors T C(X) > k.
Preuve : si T CX (X X) = T C(X) k wgt(u) alors, d’après la définition de wgt, u X X = 0. Absurde, car u est non nulle.
口
D’où, notre objectif est de trouver des classes de cohomologie non nulles de poids le plus élevé possible.
lemme :
Soit u ∈ H∗(X × X; R), alors wgt(u) ≥ 1 si et seulement si
u/∆X = 0 ∈ H∗(X; Rt) (∗)
où ∆X ⊂ X × X est le diagonal et Rt = R/∆X .
Preuve : Le lemme est une conséquence du Lemme
口
Définition : Les classes de cohomologie satisfaisant (∗) sont appelés des zéro diviseurs.
Exemples :
1) Toute classe de cohomologie u Hj (X; R), où R est un groupe abélien, détermine un
diviseur de zéro u = 1 u - u 1 Hj (X X; R)
2) Les zéro diviseurs sont faciles à décrire dans le cas de la cohomologie à coefficients dans
un corps. Par le théorème de Künneth toute classe de cohomologie u Hn(X X; K) (où K
est un corps) peut être représentée sous la forme
m
u = ai ⊗ bi, ai ∈ Hαi (X; K), bi ∈ Hn−α(X; K) i=1
m
La classe u est un diviseur de zéro si et seulement si aibi = 0. i=1
Les classes de cohomologie ayant un poids supérieur peuvent être obtenus comme cup- produit de zéro diviseurs. lemme :
Soient u ∈ Hn(X × X; R) et v ∈ Hm(X × X; Rt) deux classes de cohomologie. Alors le
poids de leurs cup-produit uv ∈ Hn+m(X × X; R ⊗ Rt) vérifie
wgt(uv) ≥ wgt(u) + wgt(v)

14 CUP-PRODUIT 27
T C(S ) =
(
≥
≥
n n n
Preuve :
On pose r = wgt(u) et s = wgt(v). Par définition de T CX (A) tout sous ensemble ouvert A ⊂ X ×X avec T CX (A) ≤ r+s peut s’écrire comme réunion A = B∪C, où B, C ⊂ X ×X
sont des sous ensembles ouverts avec T CX (B) ≤ r et T CX (C) ≤ s. Donc u/B = 0 et alors
elle existe une classe ut ∈ Hn(X × X, B; R) avec ut/(X × X) = u. De la même manière
elle existe vt ∈ Hm(X × X, C; Rt) où vt/(X × X) = v. Donc le cup-product utvt ∈
Hn+m(X × X, A; R ⊗ Rt) vérifie (utvt)/A = 0 = (uv)/A.
Proposition :
口
n 2, si n impair ; 3, si n pair.
Preuve
Soit u ∈ Hn(Sn; Q) une classe fondamentale. donc
u = 1 × u − u × 1 ∈ H (S × S ; Q)
est un diviseur de zéro non nul et
u2 = −[1 + (−1)n].u × u
il est clair que u2 est non nul pour n paire et donc d’après le corollaire T C(Sn) 3 pour n paire.
De même le corollaire 4.3.9 implique que T C(Sn) 2 pour n impaire. les inégalités inverses découlent de l’exemple 2.5.1 de la planification de mouvement sur la sphère.
Maintenant, nous calculons la complexité topologique des graphes. Définition : Un graphe G est un espace topologique de dimension 1 noté (V, E) où
1. V est un ensemble (fini) d’objets. Les éléments de V sont appelés les sommets du graphe.
2. E est sous-ensemble de V × V . Les éléments de E sont appelés les arêtes du graphe.
Une arête e du graphe est une paire e = (x, y) de sommets. Les sommets x et y sont les extrémités de l’arête.
Exemple : Un exemple de graphe à 8 sommets, nommés a à h, comportant 10 arêtes.
Proposition :
Si X est un graphe fini connexe, alors
1, si b1(X) = 0 ;
T C(X) = 2, si b1(X) = 1 ; 3, si b1(X) ≥ 2.
où b1(X) est le premier nombre de Betti de l’espace topologique X, c’est à dire le rang du
1er groupe d’homologie H1(K) = ker ∂k/ ∂k+1 (b1 est le nombre de trous circulaire de

14 CUP-PRODUIT 28
≤
× − × / ≥
T C(Σg ) =
(
i i
×
dimension 1).
Preuve Si b1(X) = 0 alors X est contractile d’où T C(X) = 1. Si b1(X) = 1 alors X a le même
type d’homotopie qu’un cercle et donc T C(X) = T C(S1) = 2. Supposons maintenant que b1(X) ≥ 2. Alors il existe deux classes linéairement in-
dépendantes u1, u2 ∈ H1(X). Ainsi
ui = 1 × ui − ui × 1, i = 1, 2.
sont des diviseurs de zéro et leur produit u1 u2 u2 u1 = 0. Donc T C(X) 3 d’après le corollaire D’autre part on a T C(X) 3 d’après le corollaire car X est un polyèdre de dimension 1. D’où T C(X) = 3. Définition : Le genre d’une surface (compacte, connexe, orientable et sans bord) est le nombre maxi- mal de cercles deux à deux disjoints tracés sur la surface, dont le complémentaire est connexe
Proposition :
Soit Σg une surface fermée orientable de genre g.
Alors
Proposition : Preuve
3, si g = 0 ou g = 1 ;
5, si g ≥ 2 .
Le cas g = 0 est couvert par la proposition. Si g = 1 la surface Σ1 est un groupe de Lie et alors T C(Σ1) = cat(Σ1) = 3. Montrons que T C(Σg ) pour g ≥ 2.
Pour g ≥ 2 on peut trouver des classes de cohomologie u1, v1, u2, v2 ∈ H1(Σg , Q) telles
que uiuj = uivj = vivj = 0 pour i j et u2 = 0, v2 = 0, et ailleurs, u1v1 = u2v2 = A ∈
H2(Σg ; Q) est une classe fondamentale. Donc, d’après la notation, on obtient
u1u2v1v2 = −2A × A /= 0
Alors le produit de ces diviseurs de zéro n’est pas nul et T C(Σg ) ≥ 5 d’après le corollaire . D’autre part l’inégalité inverse T C(Σg ) ≤ 5 est un cas particulier du corollaire .
口
Important chercher d’autre calcul
Par exemple, pour un robot volant l’espace de configurations est X = SO(3) × R3 qui a
pour complexité topologique T C(X) = T C(SO(3)) car SO(3) R3 et SO(3) ont même type d’homotopie. D’après le théorème suivant du à M.Farber :
Théorème :
Si X est un groupe topologique alors
T C(X) = ❝❛+(X)
on a T C(SO(3)) = ❝❛+(SO(3)) = 4 alors T C(X) = 4, c’est à dire j’aurais besoin d’au

14 CUP-PRODUIT 29
moins de 4 règles s1, s2, s3 et s4 définies sur 4 E.N.Rs F1, F2, F3 et F4 recouvrants X pour que le robot volant navigue dans l’espace X.