Positionnement par satellite - cnes-csg.fr · perdus en mer. Pour être capable de s’en...
17
APM3 – Positionnement par satellites Université d’été 2010 CNES Page 1 Positionnement par satellite Atelier disciplinaire de Sciences Physiques Université d’été 2010 CNES Gilles Tavernier, CNES Lucien Brault, Education nationale, Physique-Chimie Présentation de la problématique Le principe du positionnement sera présenté. Il consiste à déterminer la position d’un objet fixe ou mobile par rapport à un repère terrestre. Cette position est définie par des coordonnées angulaires : latitude, longitude et par l’altitude. Historique L’aspect historique sera abordé : détermination de la latitude et de la longitude au sextant dans la Marine, détermination à Terre de l’altitude, par mesure de la pression. Présentation des apports des techniques spatiales Les satellites ont remplacé les points de repère que constituaient le soleil, la lune et les étoiles en apportant des améliorations importantes en terme de visibilité et de couverture, tant géographique que temporelle. Selon leur principe de fonctionnement, les systèmes spatiaux permettent la localisation (mesure ascendante) qui répond à la question : « où est-il ? » ou la navigation (mesure descendante) qui répond à la question : « où suis-je ? ». Deux techniques de mesure sont utilisées : Doppler = mesure de vitesse radiale. Délai de propagation = distance. Les différents systèmes et leurs applications Transit GPS et ses cousins Glonass et Galliléo Argos SARSAT-COSPAS Doris.
Transcript of Positionnement par satellite - cnes-csg.fr · perdus en mer. Pour être capable de s’en...

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 1
Positionnement par satellite
Atelier disciplinaire de Sciences Physiques
Université d’été 2010 CNES
Gilles Tavernier, CNES
Lucien Brault, Education nationale, Physique-Chimie
Présentation de la problématique
Le principe du positionnement sera présenté. Il consiste à déterminer la position d’un objet
fixe ou mobile par rapport à un repère terrestre. Cette position est définie par des coordonnées
angulaires : latitude, longitude et par l’altitude.
Historique
L’aspect historique sera abordé : détermination de la latitude et de la longitude au sextant dans
la Marine, détermination à Terre de l’altitude, par mesure de la pression.
Présentation des apports des techniques spatiales
Les satellites ont remplacé les points de repère que constituaient le soleil, la lune et les étoiles
en apportant des améliorations importantes en terme de visibilité et de couverture, tant
géographique que temporelle.
Selon leur principe de fonctionnement, les systèmes spatiaux permettent la localisation
(mesure ascendante) qui répond à la question : « où est-il ? » ou la navigation (mesure
descendante) qui répond à la question : « où suis-je ? ».
Deux techniques de mesure sont utilisées :
Doppler = mesure de vitesse radiale.
Délai de propagation = distance.
Les différents systèmes et leurs applications
Transit
GPS et ses cousins Glonass et Galliléo
Argos
SARSAT-COSPAS
Doris.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 2
Activités Pratiques
L’effet doppler (expérience de mise en évidence)
Visibilité des satellites porteurs du système Argos (à l’aide du logiciel solstice).
Etude de la visibilité des satellites GPS.
Ce sujet permet d’aboutir à des séquences pédagogiques aussi bien en sciences physiques qu’en
mathématiques.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 3
I - Position du problème Le problème est de déterminer la position d’un objet (homme, animal, véhicule de toute nature, à la
surface de la Terre ou dans son voisinage.
L’une des difficultés est liée à la forme de la Terre, en première approximation une sphère aplatie aux
pôles (rayon équatorial : 6378 km, rayon polaire : 6357 km)
Du point de vue pratique, les coordonnées géographiques utilisées sont :
La latitude correspond au parallèle du lieu, 0° à l’équateur, -90° à +90° du pôle sud au pôle nord.
La longitude est celle du méridien, et varie de 0° (méridien de Greenwich) à 360° ou de -180° à 180°
selon les ouvrages.
L’altitude est mesurée par rapport au géoïde.
La Terre étant aplatie aux pôles, les cartes terrestres sont réalisées en approximant la Terre à un
ellipsoïde. L’ellipsoïde de référence choisi pour une carte varie selon la région cartographiée. Pour
l’Europe, il s’agit en général de l’ellipsoïde WG84…
Quelques remarques à propos de la latitude
La latitude géodésique ou géographique est l'angle que fait la normale à l'ellipsoïde de référence avec
le plan équatorial. C'est la latitude de la plupart des cartes.
La latitude géocentrique est l'angle que fait une droite menée du centre de la Terre avec le plan
équatorial. Elle est surtout employée en astronomie.
Elle peut s'écarter de la précédente de plusieurs minutes d'arc !
La latitude astronomique est l'angle que fait la verticale du lieu avec le plan équatorial. C'est elle que
l'on peut mesurer directement à partir d'observations (navigation astronomique, nivellement
topographique).

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 4
II - Un peu d’histoire Les premiers navigateurs de l’histoire étaient contraints de rester en regard des cotes, sous peine d’être
perdus en mer. Pour être capable de s’en éloigner, il a fallu attendre de savoir se repérer à la surface de
la Terre.
La latitude est celle du parallèle et grandit au fur et à mesure qu’on s’éloigne de l’équateur.
Elle utilise comme référence la direction de l’axe des pôles, qui peut être matérialisée par une étoile
fixe proche de cet axe (étoile polaire, étoile de la Petite Ourse dans l’hémisphère nord ou La Croix
du Sud dans l’hémisphère sud)).
Dans l’approximation d’une Terre sphérique,
il suffit de déterminer la hauteur (angle entre
l’horizontale du lieu et la direction de l’étoile)
de l’axe des pôles, matérialisée par une étoile
fixe proche de cet axe (étoile polaire, étoile
de la Petite Ourse).
Il est aussi possible d’utiliser la hauteur du
soleil au zénith, au moment ou il passe par le
méridien (en tenant compte de la saison)…
La longitude correspond au décalage horaire
entre un lieu de référence (Greenwich, ou
Paris dans la Marine française jusqu’en 1884)
et le lieu considéré.
Un décalage de 1 heure correspond à 360/24 = 15°.
On embarquait donc à bord des navires des horloges aussi précises que possibles, réglées sur l’heure
de référence. La comparaison entre l’heure locale (midi lorsque le soleil passe par le plan du méridien)
et l’heure de référence embarquée permet de connaître la longitude :
Sachant que la Terre effectue une rotation complète (360°) en un peu moins de 24h (en toute rigueur
un jour sidéral, soit 23 h 56’04’’), un retard de 1 h correspond sensiblement à un décalage vers l’ouest
de 360/24 = 15°.
Deux instruments étaient donc essentiels dans la marine :
Le sextant, pour la détermination des hauteurs (angles sur l’horizon) des astres,
L’horloge embarquée remplacée à partir du début du XXe par un signal radio, qui permettait d’estimer
sa longitude.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 5
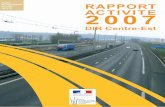
Cette carte ancienne illustre les difficultés liées à un positionnement correct…
Carte de la méditerranée du II
e siècle avant JC, reconstitution
A noter : les erreurs en latitude sont relativement faibles mais des écarts très importants en longitude,
liés à la difficulté de transporter l’heure de référence…
Les progrès de la mesure des longitudes sont d’ailleurs venus avec les progrès des horloges…

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 6
III - Les techniques spatiales et le positionnement
1. Visibilité des satellites Les satellites artificiels peuvent être utilisés pour aider au positionnement à condition d’être « visible »
de l’objet à positionner…
La « visibilité » d’un satellite (ou de l’objet à positionner) résulte du fait que les messages sont
véhiculés par des ondes électromagnétiques qui se propagent approximativement en ligne droite. Il est
nécessaire que le satellite se trouve au dessus de l’horizon.
La couverture géographique correspond à l’ensemble des points de la Terre qui peuvent être en
visibilité. Une couverture de l’ensemble du globe nécessite des satellites en orbites polaires ou quasi
polaires. Un satellite unique en orbite géostationnaire n’assure la couverture que d’un peu moins de la
moitié du globe.
La couverture dans le temps peut être intermittente (exemple : Argos) ou permanente (exemple GPS)
selon le nombre de satellites et la géométrie des orbites.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 7
2. Principe du positionnement Pour déterminer la position d’un utilisateur, il faut :
Connaître la position du satellite
Réaliser une mesure entre le satellite et l’utilisateur (temps de propagation, Doppler,…)
Avoir accès au temps de référence du système
De nombreux systèmes ont été développés selon la même structure à trois segments :
Segment utilisateur : émetteurs ou récepteurs à localiser.
Segment spatial : satellites émetteurs / récepteurs.
Segment de contrôle : calcule les positions (éphémérides) des satellites et définit le temps de
référence du système
3. Systèmes descendants et ascendants. On parle de système
ascendant lorsque les
utilisateurs sont équipés
d’émetteur envoient un
signal aux satellites, qui les
enregistre et retransmet pour
traitement.
On parle de système
descendant lorsque les
utilisateurs sont équipés de récepteurs qui reçoivent les signaux des satellites et en assure le traitement.
Le segment utilisateur reçoit le signal du satellite
et calcule lui-même sa position à partir de la
position du satellite et d’une mesure (Doppler,
pseudo-distance, phase…)
Le segment de contrôle transmet
les positions (éphémérides) des
satellites.
Le segment spatial est constitué
des satellites qui émettent un
signal incluant leur position
Le segment utilisateur est constitué d’émetteurs.
Les satellites enregistrent la mesure et les données

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 8
Navigation et Géolocalisation
Un système de navigation a pour objectif de permettre à l’utilisateur (porteur du récepteur) de
connaître sa position, et par suite de décider du chemin à prendre selon sa destination.
Les systèmes descendants sont bien adaptés à la navigation.
Notons qu’avec un système descendant, la position est connue par le porteur du récepteur et par lui
seulement ! Cela ne permet donc pas aux autres de connaître la position de l’utilisateur.
Citons comme exemples Transit (exemple historique), GPS, Glonass, Galileo.
La géolocalisation a pour objectif de positionner un objet (animal, objet, véhicule…) équipé d’un
émetteur et de permettre à l’utilisateur distant de connaître cette position.
L’émetteur permet par ailleurs de transmettre des informations variées (autre que purement
géographiques) et permet ainsi une collecte de données à distance.
Les systèmes ascendants répondent à cette problématique.
Citons comme exemples Argos, Cospas-Sarsat, Doris…
5. Deux techniques de mesure
Mesures Doppler
L’effet Doppler est un décalage entre la fréquence de l’onde émise par un émetteur et celle perçue par
un récepteur, lorsque l’émetteur et le récepteurs sont en mouvement l’un par rapport à l’autre. Il se
produit aussi bien avec les ondes sonores qu’avec les ondes électromagnétiques (lumière, ondes
radar…).
Sa manifestation la plus connue est le décalage de la hauteur d’un son vers les sons aigus lorsque
l’émetteur se rapproche du récepteur, vers les sons graves lorsque l’émetteur s’éloigne du récepteur.
Les amateurs de course automobile connaissent cet aspect.
Dans notre problème, l’objet à positionner dispose d’un émetteur d’onde électromagnétique réglé à la
fréquence fo et le récepteur à bord du satellite reçoit cette onde. Il compare la fréquence reçue à cette
d’un oscillateur embarqué, théoriquement à la même fréquence que celle de l’émetteur.
Le décalage en fréquence est donnée par
fr : fréquence reçue par le récepteur
fo : fréquence émise par l’émetteur
vr : vitesse de rapprochement apparente émetteur-récepteur
(géométrique + propagation + effets propagation)
c : célérité des ondes.
df : décalage des fréquences de référence émetteur/récepteur
Une valeur particulière du décalage correspond donc à une valeur de la composante longitudinale v//
de la vitesse relative, donc à une valeur de l’angle entre la direction de la vitesse du satellite
(tangente) et celle de la direction émetteur-satellite.
Pour un signal reçu, on peut donc calculer l’ensemble des positions possibles de l’émetteur, comme
intersection entre un cône d’angle et la surface de la Terre (une sphère).
Cela ne suffit pas. Il faut attendre la réception d’autres signaux pour préciser la position de l’émetteur
(qui est alors sur l’intersection de plusieurs courbes), en supposant que l’émetteur se déplace peu dans
le même temps…
fr = fo * (1 – v//
c ) + df
v//
v
Emetteur
Orbite du satellite
v// = vr . cos( )

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 9
Mesure de distance
Ici, le satellite embarque un émetteur d’onde électromagnétique et le signal est reçu après un délai par
le récepteur. La distance émeteur-récepteur est directement liée à la durée de propagation du signal
électromagnétique :
d = c * t = |r2(to + t) – r1(to)|
avec
to : date à laquelle le signal quitte l'émetteur
to + t : date à laquelle le signal atteint le récepteur
r1 : position émetteur, r2 : position récepteur
La connaissance de cette distance permet de placer le récepteur sur une sphère de centre le satellite
porteur de l’émetteur.
En réalité, pour précision de l’ordre de quelques mètres, il convient de tenir compte de la présence de
l’atmosphère qui modifie faiblement la célérité des ondes et leur chemin.
En pratique, on utilise plusieurs signaux à des fréquences différentes dans ce but.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 10
IV – Principaux systèmes
1. Transit (Navigation)
Il s’agit d’un système militaire américain de navigation (1964-1996)
Fréquences radio : 150 MHz et 400 MHz
Constellation de 6 satellites : 1100 km, orbite polaire
Une quarantaine de satellites lancés de1959 et 1988
Principe : décalage Doppler, trajet descendant
Émetteurs : satellites de position connue
Récepteurs : jusqu’à 70000 utilisateurs
Visibilités intermittentes
Couverture mondiale
Précision : 200 à 300 m (1 seul passage)
Accès libre et gratuit
2. GPS (Navigation)
Système militaire américain de navigation (depuis 1995)
Fréquences radio : 1227,60 MHz et 1575,42 MHz
Constellation de 24 (32) satellites : 20250 km,
inclinaison : 55°
55 satellites lancés depuis 1989 (15/03/08)
Principe : mesure de temps, trajet descendant
Émetteurs : satellites de position connue
Récepteurs : plusieurs dizaines de millions
Visibilités permanentes
Couverture mondiale
Précision : 10 m à 1 cm selon le cas.
Accès libre et gratuit
Chaque satellite génère en fonction du temps un code binaire pseudo aléatoire « C/A » qui lui est
propre, qu’il émet en continu.
Le récepteur génère les N codes possibles (31 pour GPS) et les compare au code reçu
par corrélation des deux signaux :
- on identifie le numéro du satellite
- on mesure le temps de propagation : tr rec - te sat
On définit la pseudo distance par:
R = c.(tr rec - te sat) te : temps mesuré
La mesure est faussée par:
décalage d’horloge satellite par rapport au temps GNSS (contenu dans les éphémérides)
décalage d’horloge récepteur par rapport au temps GNNS (inconnu)
délai supplémentaire de propagation du signal dû à l’atmosphère (négligé ou modélisé).
Code C/A généré par le satellite
et reçu par le récepteur.
Code C/A généré par le récepteur.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 11
Pourquoi au moins quatre satellites en visibilité ?
Première approche :
Les positions des satellites sont supposées parfaitement connues et leurs horloges parfaitement
calées sur le temps GNSS. Il reste pour un récepteur donné 4 inconnues :
les trois coordonnées de position du récepteur Xrec , Yrec , Zrec
et le décalage temporel trec (propres au même récepteur)
Donc 4 équations nécessaires, d’où 4 mesures nécessaires au même instant.
Seconde approche :
Géométriquement, l’intersection de Trois sphères détermine une intersection unique à proximité de
la Terre, mais il faut tenir compte d’une inconnue supplémentaire, à savoir le décalage temporel
entre l’horloge du récepteur, de précision modeste, et le temps GNSS sur lequel sont calées les
horloges des satellites.
GPS différentiel
Pour améliorer la précision, on utilise des
balises supplémentaires fixes placées à la
surface de la Terre, dont les positions
sont connues avec une grande précision,
équipées de récepteurs GPS et
d’émetteurs. Ces balises supplémentaires
permettent de fournir des « corrections »
à d’autres récepteurs (100 km).
La précision est alors de l’ordre du mètre,
voire de quelques centimètres.
Pour la construction de grands ouvrages,
le GPS différentiel permet d’obtenir la
précision nécessaire.
Faiblesses du système GPS
Problème éventuel d’intégrité : données erronées fournies par un satellite défaillant.
Vulnérabilité au brouillage radio (autres émetteurs, scintillation iono…)
Dépendance vis-à-vis des autorités militaires américaines
Systèmes complémentaires pour améliorer la précision…
Expérience CE-GPS, projet Euridis, programme EGNOS
Information supplémentaires : exactitude des données reçues et amélioration des performances
30 stations sol (GPS & Glonass) et 4 centres de contrôle.
Données d’intégrité et corrections différentielles transmises via des satellites géostationnaires.
WAAS en Amérique du Nord (depuis 2003)
MSAS au Japon

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 12
Différents modes de positionnement et précision
Mode de positionnement autonome (« absolue ») : 10 m (celle offerte sur les GPS routiers…)
Un seul récepteur en temps réel (mesure de pseudo-distance)
Exemple : Magellan Explorist 100 (~100 €)
Mode de positionnement différentiel DGPS (« relatif ») : 1 m
Un seul récepteur en temps réel (mesure de pseudo-distance) + signal d’augmentation (ex:
EGNOS)
Exemple : Garmin Navtalk GPS/GSM (~350 €)
Mode de positionnement différentiel RTK (« relatif ») : 10 cm
Réseau local de récepteurs équipés de moyens de communication
Traitement des mesures de phase avec résolution des ambiguïtés
De préférence récepteurs bi-fréquences
Exemple : Leica SR20 (~3000 €)
Mode de positionnement statique précis différé (« relatif ») : 1 cm
Réseau de récepteurs bi-fréquences et d’antennes de grande qualité
Monumentation adaptée
Session de mesures statiques de durée suffisante (plusieurs dizaines de minutes à plusieurs
heures)
Post-traitement très fin des données avec un logiciel « géodésique »
Exemple : Topcon GB1000 (~5000 €)
3. GLONASS (Navigation)
Système militaire russe de navigation (depuis 1995)
Fréquences radio : 1227 MHz et 1575 MHz
Constellation de 24 (19) satellites : 19150 km, inclinaison : 64,8°
Une quarantaine de satellites lancés depuis 1995
Principe : mesure de temps, trajet descendant
Émetteurs : satellites de position connue
Récepteurs : une soixantaine de stations GPS/GLONASS IGS
Visibilités permanentes
Couverture mondiale
Précision : 10 m à 1 cm
Accès libre et gratuit
4. GALILEO
Futur système civil européen de navigation (2014 ?)
Fréquences radio : 1192 MHz, 1279 MHz, 1575 MHz & ?
Constellation de 30 satellites : 23000 km, inclinaison : 56°
Deux satellites lancés :
GIOVE-A & B (28/12/2005 et 27/042008).
Principe : mesure de temps, trajet descendant
Émetteurs : satellites de position connue
Récepteurs : 100 millions d’utilisateurs en 2010 ?
Visibilités permanentes
Couverture mondiale
Précision : 10 m à 1 cm
Accès libre et gratuit ou amélioré, crypté et payant.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 13
Interopérabilité, compatibilité, hybridation et interprétation
Aujourd’hui plusieurs systèmes de positionnement « cohabitent » simultanément.
Ces systèmes sont compatibles. (pas de dégradation d’un système tiers).
Ces systèmes sont interopérables. (amélioration en cas d’hybridation)
Cela permet d’augmenter le nombre de satellites en visibilité dans les situations difficiles
(canyons urbains par exemple)
Comment interpréter les coordonnées ?
GPS et Galileo donneront-ils les mêmes coordonnées du même point ?
Comment positionner un point GPS sur une carte Topo française ?
Comment interpréter les hauteurs par rapport aux altitudes ?
5. Argos (Localisation)
Système civil franco-américain de localisation et de collecte de données (depuis 1978)
Fréquence radio : 401,75 MHz
5 ou 6 satellites en orbite polaire (NOAA, METOP, SARAL…)
Deux satellites lancés depuis 2006
Principe : mesure de décalage Doppler, trajet montant
Émetteurs : balises terrestres à localiser (plus de 10000)
Récepteurs : satellites d’orbite connue.
Visibilités intermittentes.
Couverture mondiale.
Précision : 150 m à 350 m, quelques m avec un récepteur GPS
Accès payant et limité aux utilisateurs légitimes
6. COSPAS – SARSAT
Système civil international de localisation des détresses (depuis 1982)
Fréquences radio : 406 MHz (121,5 MHz)
6 satellites en orbite polaire (russes et américains) + 5 satellites géostationnaires (36000 km)
Principe : mesure de décalage Doppler, trajet montant
Émetteurs : balises à localiser (400000 à 406 MHz, 1 million en 2010, 600000 à 121,5 MHz)
Récepteurs : satellites d’orbite connue
Visibilités intermittentes
Couverture mondiale
Précision : 2 km à 406 MHz, 20 km à 121,5 MHz amélioration avec un récepteur GPS
Accès libre et gratuit

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 14
ACTIVITES
Activité 1 : A propos de l’effet Doppler… L’effet Doppler est le décalage en fréquence qui se produit entre l’émission d’une onde et sa réception,
lorsque l’émetteur et le récepteur sont en mouvement l’un par rapport à l’autre.
Si l’émetteur se rapproche du récepteur, la fréquence perçue est plus élevée que celle émise. Pour des
ondes sonores, cela se traduit par un décalage vers les sons aigus. Si au contraire l’émetteur s’éloigne,
la fréquence de l’onde reçue est plus faible que celle émise. Avec des signaux sonores, cela se traduit
par un son reçu plus grave.
Le décalage en fréquence est donné par f
fo =
vlongitudinale
c
La différence est faible tant que la vitesse relative de l’émetteur par rapport au récepteur est faible.
Expérience 1 : Effet Doppler avec ultrasons
Compte tenu des vitesses relatives qu’on est capable de produire en labo, on travaille avec des ondes
sonores ou ultrasonores.
On place un émetteur d’ultrasons sur un véhicule modèle réduit, et un récepteur fixe.
La fréquence du signal reçu (après mise en forme) est mesurée à l’aide d’un fréquencemètre de
précision. Noter la valeur mesurée à l’arrêt.
On lance le véhicule portant l’émetteur en direction du récepteur :
Noter la nouvelle valeur. Commenter
On lance le véhicule portant l’émetteur en sens inverse.
Noter la nouvelle valeur. Conclure
Expérience 2 : Effet Doppler dans le domaine sonore
Les auditeurs sont placés face à l’opérateur, à quelques mètres.
Un buzzer (avec oscillateur intégré) est placé à l’extrémité d’une ficelle de quelques dizaines de cm et
l’opérateur le fait tournoyer à la manière d’une fronde.
Que constate-t-on ?
Expérience 3 : Un autre exemple
On dispose cette fois de deux émetteurs à la même fréquence
(hauts parleurs alimentés par le même GBF). L’un des deux est
gardé fixe, l’autre est suspendu de manière à avoir un mouvement
de translation pendulaire.
La détection se fait comme précédemment à l’oreille.
Le décalage en fréquence étant faible, il sera détecté en
superposant le son de fréquence fo avec celui de fréquence
décalée.
Après mise en mouvement du haut parleur mobile, on entend un
phénomène de battements.
Expliquer le phénomène.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 15
Activité 2 : Visibilité des satellites porteurs du système ARGOS Le système ARGOS, qui repose sur des mesures doppler, est embarqué comme passager à bord de
quelques satellites en orbite basse. Par exemple, les satellites NOAA ont des orbites quasi circulaires,
d’altitude environ 800 km. Leur période orbitale est de l’ordre de 1 h 40 mais ils ne demeurent en vue
d’un point de la surface terrestre (au dessus de l’horizon) que quelques minutes au maximum à chaque
passage.
Travail :
Démarrer Solstice.
Paramétrer l’animation : Choisir la station Toulouse (ou bien créer la votre).
Choisir les satellites NOAA.
Régler l’heure de démarrage de l’animation (0 h par exemple).
A l’aide d’un clic droit sur la carte, demander l’affichage des visibilités.
Démarrer l’animation, et régler sa vitesse (x360 ou x600 est un bon compromis).
Observer les passages en vue de la station choisie.
Poursuivre l’animation sur une durée de 24 h.
Afficher les passages en vue de la station : Simulation / Suivi station.
Commenter.

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 16
Activité 3 : Visibilité des satellites GPS Les satellites de la constellation GPS (24 au minimum en activité pour une couverture permanente)
sont situés sur des orbites hautes, à environ 20000 km d’altitude. A cette altitude, leur période est
d’environ 12 h, et ils peuvent rester en vue d’un point de la surface terrestre pendant des durées assez
longues, jusqu’à près de 7 h (mais ils sont aussi hors de vue pendant des durées de plusieurs heures !).
Pour déterminer la position à l’aide d’un récepteur GPS simple, ce récepteur doit ‘voir’ 4 satellites de
la constellation au minimum. Par ailleurs, ils fournissent des données plus ou moins utiles selon leur
élévation au dessus de l’horizon.
Travail :
Démarrer Solstice.
Choisir un point de la surface du sol (notre station), par exemple Toulouse.
Pour cette station prédéfinie, un satellite est visible si son élévation est de plus de 10°.
Charger la base de satellite qui convient :
Fichier / régénérer : Vider la base de satellites
Fichier / Importer : Fichier satellites : dans le dossier data, choisir la constellation GPS
Sélectionner 24 satellites de la constellation GPS.
Par un clic droit sur la carte, demander l’affichage des visibilités…
Noter le nombre de satellites GPS en vue de la station. Conclure.
Demander l’affichage de l’état des satellites à ces instant : État présent / satellites…
Pour une élévation minimale de 10°, retrouver le nombre de ces satellites en vue de la
station. Observer les élévations et distances. Conclure.
On peut aussi suivre l’animation dans le temps :
Démarrer l’animation et régler sa vitesse (un facteur x600, c'est-à-dire 1 s pour 10 minutes
est un bon compromis).
Observer dans la fenêtre de la station le nombre de satellites en vue à chaque instant. Entre
quelles valeurs varie ce nombre ?
Poursuivre ainsi l’animation pendant 24 h par exemple, et afficher les passages successifs en
vue de la station (Simulation / suivi station).
Quelles sont les durées de visibilités depuis la station ?

APM3 – Positionnement par satellites Université d’été 2010 CNES Page 17
On peut refaire le même travail pour une autre station (par exemple de grande latitude) et
comparer…
Comparer par exemple la station Kourou et la station Kiruna (ou bien créer une station pôle.
Que constatez-vous ?