PM motor

of 53
Transcript of PM motor
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 1
Chapitre II : Thorie des machines synchrones -Alternateur-
II-1. Classification des machines synchrones
On peut classer les machines synchrones daprs le mode de construction utilis pour la fabrication des rotors ; mais quelque soit le type utilis, sa vitesse est constante (ns = constante). II-1-1. Machines ples saillants
Elles utilisent des pices polaires sur une culasse avec des enroulements dexcitation constitues par des bobines. On utilise ce type de machines dans les centrales hydrauliques, le rotor comporte 2p ples, sa vitesse de rotation se calcule par la formule suivante :
pfns = [tr/s]
ou encore : pf.60ns = [tr/mn]
Remarque
La vitesse de rotation des turbines hydrauliques est faible (moins de 1000 tr/mn : pour une frquence de 50 Hz, p est suprieur 3).
II-1-2. Machines ples lisses (entrefer constant)
A la diffrence des prcdents, ces machines ont un entrefer constant, lenroulement dexcitation tant place dans des rainures longitudinales usines sur un cylindre dacier massif. Le rotor peut comporter plusieurs encoches, autrement dit les bobines peuvent tre loges dans plusieurs encoches. Ce type de machines est utilis surtout pour les grandes vitesses, donc elles ont 3, 2 ou 1 pair de ples.
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 2
Ces machines ncessitent un moteur dentranement rapide qui se spcifie par les turbines vapeur dans les centrales thermiques par exemple ; ces machines gnratrices de courant portent le nom de turbo-alternateur. II-2. Rpartition du champ magntique dans lentrefer
La rpartition du flux dans lentrefer dpend de la forme des ples inducteurs dans le cas des machines ples saillants ; et de lcartement des encoches ainsi que le nombre de conducteurs par encoches dans le cas des machines ples lisses, donc pour rendre linduction de forme sinusodale, on envisage les deux cas suivants : a- Ples saillants
On donne aux panouissements polaires un rayon de courbure de telle faon faire accrotre ou dcrotre progressivement linduction c'est--dire suivant une forme sinusodale ; cela revient faire varier lentrefer car :
JNdlH = . JNeHlHlH srss =++ 02
Puisque Hs = Hr = 0 (car la permabilit du fer r ) ; on peut crire :
eNJH20
= do :eJNHB a 2
0 == Daprs la formule prcdente, on peut faire varier lentrefer de telle faon faire varier linduction de faon sinusodal (figure prcdente). b- Ples lisses On agit sur lcartement entre les encoches et le nombre de conducteurs par encoche ; tudions les cas suivants :
1 encoche /ple.
2 encoche /ple.
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 3
Si on multiplie davantage le nombre dencoches par pole, on obtient une courbe en forme descalier qui se rapproche de plus en plus dune sinusode.
II-3. Constitution de lalternateur
Un alternateur est une machine synchrone qui comporte un inducteur (rotor) et un induit (stator).
II-3-1. Induit (stator)
Le stator est toujours soigneusement feuillet, il est constitu par une couronne de disques dacier doux, isols les uns des autres par du vernis. La couronne du stator a la mme longueur axiale que les pices polaires, elle porte des encoches dans lesquels loge lenroulement dinduit. Enroulement statorique (induit) :
Un enroulement est constitu de tranches gnralement prpares davance et que lon relie ensuite entre elles par des connexions extrieures, ce sont les sections . Chaque section comporte un certain nombre de spires et par consquent 02 paquets de brins actifs appel faisceaux . Lensemble par pole de sections dune mme phase sappelle bobine . Les parties frontales (extrieures aux encoche) des bobines constituent les ttes de bobines , elles sont inactives. Les brins actifs entre lentre et la sortie sont connects de telle faon que leur f.e.m sajoutent. Il existe 2 types denroulement :
Enroulement bobines spares. Enroulement enchevtres. a- Enroulement bobines spares.
Ce type denroulement peut tre appel bobines concentriques caractrises par le fait que les sections dune mme bobine sont concentriques mais de dimensions diffrentes.
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 4
b- Enroulement enchevtres.
Constitution de lenroulement statorique :
Dfinitions :
Pas polaire : cest langle ou larc entre 2 ples successif de noms contraires (N et S) ; on utilise les formules suivantes :
p = en rd
pD.2. = en m avec D : diamtre de la machine
pZ.2
= en encoche, Z : le nombre total dencoches
Pas dencoche : cest la distance entre 2 encoches successifs :
ZD
e. = en m
Pas de la bobine : cest la largeur de la bobine (une section)
Si y= lenroulement est pas diamtral Si y
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 5
le rotor, pour cette raison le rotor ples lisses est toujours massif. Aprs sa sortie de fonderie sous forme de cylindre, on y pratique des rainures pour loger les conducteurs des enroulements. Par contre le rotor ples saillants est gnralement feuillet pour faciliter sa construction.
Bobines de linducteur Les bobines magntisantes entranes par le rotor doivent tre alimentes en courant continu et ce, par lun des procds suivants :
a- Utilisation dune gnratrice courant continu (dynamo)
Cette gnratrice appele excitatrice est monte en bout de larbre, son rle est de transmettre du courant continu au rotor par lintermdiaire de 2 bagues en bronze. Le rglage de lintensit de ce courant dexcitation tant obtenu par le rglage du courant de linducteur de la gnratrice excitatrice.
b- Utilisation dune excitatrice statique
La dynamo est remplace par un alternateur dit auxiliaire auquel on adjoint un redressement de courant qui fournit un courant continu au rotor de lalternateur principal. Ce procd est surtout utilis pour lexcitation des turbo-alternateurs modernes. Il prsente lavantage de ne pas utiliser le collecteur, les bagues, ni les charbons, qui, cause des tincelles et en prsence de lhydrogne prsente un danger permanent.
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 6
Le rglage du courant dexcitation de lalternateur principal est assur par lintermdiaire de linducteur fixe de lalternateur auxiliaire.
II-4. Calcul de la f.e.m vide thorique
On prend une machine bipolaire, on suppose que les f.e.m sont en phase de tout les brins dune mme phase et de forme sinusodale.
bobinage du stator
.
. .
Ie
N
S
roue polaire
Le sens de courant est arbitraire Soit 2N : le nombre de brins actifs/phase =N spires/phase Si on suppose que linducteur tourne dans le sens horaire du point de vue lectrique tout se passe comme si linducteur est immobile et le stator tourne dans le sens inverse (sens trigonomtrique). Pour une position quelconque de la normale le flux est sinusodal :
tcos.0=
tNNe sin.dtd
0== , Avec f 2= donc tfNe sin.2 0=
La valeur efficace sera alors : 022 = fNE ; ce qui donne :
= ...44,4 fNE avec N : le nombre de spires/phase On peut utiliser : = .'..22,2 fNE avec N : le nombre de brins (conducteurs)/phase II-5. Calcul de la f.e.m vide relle
En ralit le flux n'est pas vraiment sinusodale et les diffrentes f.e.m ne sont pas en phase. La rsultante de la f.e.m e(t) est le module d'une somme vectorielle. Pour traduire ces imperfections, on introduit un coefficient K (facteur de correction) qui caractrise la machine. La valeur efficace relle de la f.e.m vide s'exprime par la relation :
uph NfKE = ....44,4 Le facteur K dpend de type denroulement et de la forme de la courbe de la f.e.m (ou du flux).
II-5-1. Facteur denroulement (bobinage) K1
Dans la pratique, pour diffrentes raisons (facilit de construction, rduction des harmoniques, .), on ne dispose pas la totalit de lenroulement dune mme phase du stator dans 2 encoches diamtralement opposs. Ce qui entraine une rduction de la f.e.m
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 7
par rapport la valeur thorique, donc elle doit tre corrige par un facteur denroulement qui dpend de la distribution (rpartition), de raccourcissement et dinclinaison de encoches. Le facteur denroulement K1 peut tre calcul par la formule suivante :
ird KKKK ..1 = O Kd : le facteur de distribution Kr : le facteur de raccourcissement Ki : le facteur dinclinaison
a- Facteur de distribution Kd Les spires dune mme phase sont dcales dun angle lectrique e , par exemple les f.e.m engendres par le champ tournant dans les brins actifs qui occupent les encoches (2-2) sont en retard de e par rapport celles engendres dans les brins actifs des encoches (1-1) Si q est le nombre dencoche par ple et par phase, le facteur de distribution est calcul par :
2sin.
2sin
e
e
d
q
qK
=
O langle lectrique Z
ppe360.. ==
b- Facteur de raccourcissement Kr
Dans ce cas louverture de diffrentes spires est infrieure au pas plaire, si langle lectrique douverture dune spire est )( e les f.e.m induites dans les brins actifs disposs dans les encoches 1-1 seront diminues donc la f.e.m est corrige par le facteur de raccourcissement
calcul par : 2.cos erBK = ou 2..sin
yKr =
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 8
si ( )=y ; Kr=1
Le pas polaire : pD.2. = avec D : diamtre moyen de la machine
c- Facteur dinclinaison Ki
Pour les encoches inclines, le facteur dinclinaison se calcule par :
2.
2sin
e
e
i
p
pK
=
O p : le nombre de paire de ples, langle dinclinaison e (voir la figure prcdente).
II-5-2. Facteur de forme K2
Pour le calcul thorique de la f.e.m, nous avons suppos que le champ radial dans lentrefer est sinusodal, mais en ralit, cette condition nest pas ralise, donc la f.e.m induite nest pas tout fait sinusodale. Par dfinition le facteur de forme est calcul par :
moy
eff
EE
K =2
9 Pour bien comprendre linfluence de facteur de forme calculons ce facteur pour une
f.e.m sinusodale : 11,122
2 ===m
m
moy
eff
E
E
EE
K
9 Pour une forme non sinusodale, on procde de la manire suivante : - On divise lintervalle OC en n parties gales - On mesure les ordonnes e1, e2, e3, e4, . en - On calcule respectivement la f.e.m moyenne et efficace :
neeeeE nmoy
.......321 +++= et n
eeeeE neff22
322
21 .......+++=
- On en dduit le facteur de forme :
11,12 =moy
eff
EE
K
II-5-3. Expression globale de la f.e.m relle
Aprs correction, la f.e.m relle se calcule par : uph NfKKE = ....4 21
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 9
II-6. Harmoniques suprieurs de la f.e.m
II-6-1. Causes des harmoniques
En ralit la f.e.m nest pas sinusodale cause des harmoniques qui sont dus : a- Rpartition non sinusodale de linduction dans lentrefer : la forme des ples dans le
cas des ples saillants et le nombre dencoches par ple dans le cas des machines ples lisses.
b- Dformations supplmentaires dues la raction dinduit. c- Ondulations priodiques sous laction de la denture de linduit ou de linducteur, la
variation de la reluctance de la denture. La figure montre que suivant la position de la pice polaire par rapport aux dents, la reluctance de lentrefer est modifie et par consquent le flux et la f.e.m seront modifis. La courbe des f.e.m comporte alors des dformations.
Etude dune courbe priodique mais non sinusodale
Soit la fonction B une fonction priodique de frquence f : Daprs la dcomposition de Fourier une courbe priodique est la somme de plusieurs courbes sinusodales dordre impaire (1, 3, 5, 7 etc.)
Harmonique fondamental
T = T1
T3
T5
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 -2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
harmonique
B
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 10
+= .........5cos513cos
31cos1 MBB
Coubre rouge : courbe relle Soit 12......5,3,1 +== k rang (ordre) de lharmonique Pour : 1= la courbe B1 (courbe sinusodale bleue) cest lharmonique dordre 1, on
lappelle lharmonique fondamental de mme priode et de mme frquence que la courbe relle f1=f
Pour : 3= la courbe B3 (courbe sinusodale verte) cest lharmonique dordre 3. Cest une fonction sinusodale de frquence f3=3f
Pour : 5= la courbe B5 (courbe sinusodale noire) cest lharmonique dordre 5. Cest une fonction sinusodale de frquence f5=5f
Donc pour une fonction dordre , la frquence est de ff . = De mme
== 1
Calcul de la f.e.m induite par un harmonique suprieur
La f.e.m des harmoniques est donne par: = ....44,4 ,1 fKNE 11,1,2 =K car les harmoniques sont de forme sinusodale
Facteur de bobinage : ,,,1 . rd KKK =
2..sin,
yKr = , (Si le pas est diamtral 1, =rK )
2.sin.
2.sin
,e
e
d
q
qK
=
Aprs avoir calcul les f.e.m des harmoniques, la f.e.m totale (relle) sera alors :
.......2523
21 +++= EEEE
Calcul de la distorsion harmonique (dformation):
( ) 100.......%1
25
23 X
EEE
D++=
II-6-2. Inconvnients des harmoniques
a- Pour les harmoniques suprieurs 3, le courant induit produit plus de pertes par effet Joules dans le cuivres et par courant de Foucault dans le circuit magntique, donc plus de pertes supplmentaires.
b- Les harmoniques donnent lieu des perturbations radiofrquences puisquils atteignent des HF.
-
Chapitre 2 Thorie des machines synchrones- Alternateur
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 11
II-6-3. Attnuations et suppression des harmoniques
Si on ne peut pas liminer totalement les harmoniques, par contre on peut les rduire leur valeur minimales : 1-Etude de lharmonique dordre 3 : Considrons 3 f.e.m induites triphases en un systme quilibr :
Comme le pas plaire de lharmonique 3 est le tiers du pas plaire du fondamental, avec les mmes conventions, on aura :
Alors que les tensions induites constituent, pour le fondamental, un systme triphas quilibr, les trois tensions induites par lharmonique 3sont en phase. Dans les cas dun montage en toile , ces 3 tensions disparaissent totalement car elles squilibrent deux deux. Mais si le montage est en triangle, ces 3 tensions ajoutent leurs effets , ce qui provoquent un courant de circulation entre les phases, donc il produit plus de pertes supplmentaires.
Consquence : pour liminer les harmoniques 3 et multiple de 3, il suffit que le montage (couplage) soit en toile.
2- Pour les machines ples saillants, on donne aux panouissement un rayon de courbure plus faible que larmature dinduit, ce qui a pour effet de faire varier linduction de faon sinusodale.
3- Pour les machines ples lisses, on agit sur le nombre dencoches de telle faon obtenir une courbe se rapprochant de lharmonique fondamentale.
4- On emploi un pas raccourci bien dtermin
Exemple : si le pas est diamtral : 1, =rK , donc les harmoniques se sont pas nuls. Si on prend par exemple :
54==
y , 2
.54.sin, =rK , pour les harmoniques 5 et
multiples de 5 : 0, =rK , ce qui donne les f.e.m des harmoniques 5 et multiples de 5 nuls. Donc on choisissant un pas raccourci de
54==
y , on a pu liminer les
harmoniques 5 et multiples de 5
5- On limine les harmoniques de denture en inclinant par rapport laxe du rotor, de telle faon rendre la reluctance constante dans lentrefer quelque soit la position de linducteur.
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 1
Chapitre III. ALTERNATEUR AUTONOME III-1. Dfinitions
a- Un alternateur est dit Autonome, sil est seul fournir de lnergie lectrique un rcepteur donn (exemple : groupe lectrogne).
b- La frquence des tensions de lalternateur tant impos par la frquence du rseau (exemple : f=50 Hz), pour cette raison, il faut maintenir constante la vitesse du groupe qui est la vitesse de synchronisme nS. Notations : (dans tout le chapitre, on adopte les notations suivantes) - Tension simple : V - Tension compose : U - Courant induit par phase : I quelque soit le couplage (toile ou triangle) - Courant dexcitation : J
III-2. Marche vide dun alternateur
On entend par marche vide dun alternateur, le stator ne dbite aucun courant (I=0). La f.e.m vide E0, mesure entre les bornes du stator est donne par la relation suivante :
uph NfKE = ... N : le nombre de spires/phase : le flux utile par ple qui est d la F.M.M de linducteur seul. Remarque : cette f.e.m vide est mesure entre une phase et le neutre (tension simple)
III-2-1. Caractristique vide
Cet la courbe de E0 en fonction du courant dexcitation J (E0=f(J)) la vitesse de synchronisme maintenue constante. Le relev de cette courbe seffectue comme suit : On entraine lalternateur vide la vitesse de synchronisme, et on relve les mesures des tensions entre les bornes du stator (induit) E0 correspondantes aux diffrents courant dexcitation J (la variation du courant dexcitation est assure par le rhostat dexcitation., puis on trace la courbe E0=f(J) : cest ce quon appelle caractristique vide dun alternateur.
J
J
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 2
III-2-2. Interprtation de la courbe de la caractristique vide
uNfKE = ...0 SBNfKE ....0 =
JNdlH = . JNeHlHlH srss =++ 02
Puisque Hs = Hr = 0 (car la permabilit du fer r ) ; on peut crire :
eNJH2
=
- Lorsque la machine nest pas sature HB r ..0 = ; on peut crire alors:
eJNHB a 2
0 == donc : JKSeJNNfKE '..
2... 00 ==
Cest lquation dune droite qui passe par lorigine, avec comme pente K - Si le courant dexcitation continue augmenter, E0 augmente moins vite et
lquation JKE '.0 = nest plus une droite car K nest plus constante, ce qui donne une courbe qui suit la courbe daimantation car HB r ..0 et on dit alors que la machine est sature.
III-3. Marche en charge dun alternateur
Lalternateur est entrain sa frquence de synchronisme nS excit par le courant dexcitation J, il fournit alors une f.e.m E0 aux bornes du stator (induit) ; si ce dernier est branch sur une charge triphase quilibre, il dlivre un courant induit I, quon appelle courant induit (dans la figure I=Ia=Ib=Ic).
J
J
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 3
Remarque : la charge peut tre un rhostat triphas, une inductance triphas, ou une batterie de condensateurs triphase ou encore une charge quelconque. Pour cette raison, on peut donner diffrentes valeurs du facteur de puissance.
III-3-1. Raction dinduit
Quand un courant I circule dans lenroulement du stator, le flux utile nest plus engendr uniquement par la F.M.M de linducteur seul, laction de celle-ci vient se superposer la F.M.M due lenroulement induit pour donner un nouveau flux utile rsultant qui est d laction simultane de ces 2 F.M.M.
Ce phnomne sappelle : raction magntique dinduit.
III-3-2. Etude dun alternateur bipolaire ples lisses
Supposons que lenroulement statorique est sans rsistances et sans fuites magntiques. On dsigne par le dphasage du courant I dans une phase statorique par rapport la f.e.m E0 induite par le flux J de linducteur seul. Ce dphasage dpend de la nature du rcepteur branch aux bornes de lalternateur ; tudions pour cela les cas suivants :
a- Charge purement rsistive
0=
Dans cette figure on a un champ induit maximal donc la f.e.m induite sera maximal, ce qui entraine un courant induit maximal. On voit que le champ produit par le rotor est perpendiculaire au champ produit par le stator, pour cette raison la raction dinduit est dite transversale.
= 90),( Ji BB Daprs le lignes de champ de la figure (a), on remarque quil y a une dissymtrie du champ rsultant dans lentrefer ; on dit quil y a distorsion du champ par consquent : la raction transversale provoque une distorsion du champ dans lentrefer.
b- Charge purement inductive
+= 90
Si le rotor occupe la position de la figure (a), la f.e.m est maximale mais le courant est en retard de 90 ; donc il faut que le rotor tourne de 90 pour que ce courant atteigne sa valeur maximale. Dans cette position fig. (b), le champ tournant
(b)
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 4
statorique et le champ tournant rotorique sont opposs. Pour cette raison la raction dinduit est dite longitudinale ou directe. =180),( Ji BB Pour un courant dexcitation J donn, le flux a diminu cause du flux d linduit ; pour laugmenter sa valeur initiale, il faut augmenter le courant J. On dit alors que cette raction dinduit est dmagntisante.
c. Charge purement capacitive
= 90
Si le rotor occupe la position de la figure (a), la f.e.m est maximale mais le courant est en avance de 90 ; donc il faut que le rotor tourne 270 pour que ce courant atteigne sa valeur maximale. Dans cette position (fig. c), le champ tournant statorique et le champ tournant rotorique sont en phase. Pour cette raison la raction dinduit est dite aussi longitudinale ou directe. = 0),( Ji BB Pour un courant dexcitation J donn, le flux a augment cause du flux d linduit ; pour le diminuer sa valeur initiale, il faut diminuer le courant J. On dit alors que cette raction dinduit est magntisante.
d- Charge quelconque Soit : le retard du courant sur la f.e.m vide. Si le rotor occupe la position de la figure (a), la f.e.m est maximale mais le courant est en retard de ; donc il faut que le rotor tourne un angle de pour que ce courant atteigne sa valeur maximale.
Cas rsistif : += 900),( Ji BB pour = 0 Cas inductif : += 9090),( Ji BB pour = 90 Cas capacitif : =+= 090270),( Ji BB pour == 27090 Daprs les cas prcdents, on peut gnraliser pour le cas gnral :
+= 90),( Ji BB pour quelconque. Le champ induit Bi est dphas de + 90 en arrire par rapport au champ BJ et par consquent on aura le champ
rsultant Br : iJr BBB += On peut crire aussi pour le flux rsultant: iJr +=
(c)
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 5
Remarque : on peut dcomposer le courant I en une composante en phase avec la f.e.m E0 ( = cos.IIa ), ce qui provoque une raction dinduit transversale et une composante dphase de 90 sur E0 ( = cos.IIa ), ce qui provoque une raction dinduit longitudinale.
III-4. Diagramme vectoriel et circuit quivalent de lalternateur
III-4-1. Diagramme de Fresnel
On choisit le courant induit I comme origine des phases, le flux i produit par le champ statorique Bi sera en phase. Le champ rotorique BJ produit le flux J qui sera en avance de
+ 90 sur i. Si on suppose que le flux est sinusodal : tcos.0=
)2
cos(.sin.dtd
00 === tNtNNe
Sous forme de complexe, on peut crire : = ... NjE Donc la f.e.m est toujours en retard de
2 par rapport au flux qui la produit.
Pour dessiner le diagramme de Fresnel, on dtermine : 1) La f.e.m vide E0 en arrire de 90 par rapport au flux J 2) La f.e.m induite Ei produite par le flux induit seul i , elle est en arrire de 90
par rapport au flux i
Dtermination de la f.e.m Ei due la raction dinduit: On suppose le flux est sinusodal : ti cos.0= , ce qui donne un courant sinusodal dans linduit : tII cos.0=
A cause de ce flux ou de ce courant une f.e.m sera induite au stator
)2
cos(.sin.dt
d00
==== tILtILdtdILNE iiiii
En posant ii LX = : ractance dinduit, on peut crire sous forme complexe : IXjE ii ..=
3) La f.e.m rsultante EC(quon appelle f.e.m en charge) est produite par le flux rsultant
iJr += , elle est en arrire de 90 par rapport au flux r :
I
E0 I.cos
I.sin
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 6
iC EEE += 0 Donc iC EEE =0 , comme IXjE ii ..= , on peut crire: IXjEE iC ..0 += Si on nglige la rsistance et le flux de fuites statorique,
VEC , on peut reprsenter le rsultat prcdent par circuit quivalent
III-4-2. Etude du flux de fuites statorique et rsistance statorique
Dans ltude de la raction dinduit, on a suppos lenroulement statorique sans rsistances et sans fuites magntiques mais dans la pratique, il est ncessaire de tenir compte de ces 2 grandeurs savoir :
1- La rsistance R dune phase statorique (facile mesurer) qui donne une chute de tension R.I.
2- Lexistence de fuites magntiques donne une ractance de fuites x dune phase statorique, ce qui donne une chute de tension jxI.
Soit f le flux de fuites magntiques, une f.e.m e sera induite cause de ce flux : Soit le courant sinusodal : tII cos.0=
)2
cos(.sin.dt
d00
==== tIltIldtdIlNe f
En posant lx = : ractance de fuites, on peut crire sous forme complexe : Ixje ..= En tenant compte de la rsistance du stator et la ractance de stator Ec ne sera plus gale V ( VEc ) et on aura pour la convention gnrateur IRVeEc .+=+ , ce qui permet dcrire: IxjIRVEc ... ++= Comme : IXjEE ic ..0 += , on peut crire : IXjIxjIRVE i.....0 +++= Cette dernire relation est appel lquation de lalternateur, elle permet de tracer le circuit quivalent de lalternateur :
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 7
III-5. Diagramme de Behn-Escenburg
III-5-1. Circuit quivalent
On suppose que lalternateur nest pas satur : Xi : ractance dinduit est constante x : ractance de fuites (elle est toujours constante) On peut poser : X= Xi +x : sappelle ractance
synchrone de lalternateur (elle est constante si lalternateur nest pas satur)
La f.e.m vide sera alors : IXjIRVE ...0 ++= et le circuit quivalent sera :
On pose Z=R+jX qui est limpdance synchrone de lalternateur, la f.e.m vide peut tre mise sous la forme suivante : IZVE .0 += et le circuit quivalent sera :
III-5-2. Diagramme vectoriel
IXjIxjIRVE i.....0 +++= On trace le courant induit I comme origine des phases, puis on trace la tension
VOA = dphas de langle par rapport au courant (il dpend de la charge branche au stator) . On trace ensuite IRAB .= en phase avec I, puis IxjBC ..= en avant de 90 par rapport au courant , aussi IXjCD i..= pour trouver enfin la rsultante 0EOD =
CEOC = reprsente la f.e.m en charge.
Mthode analytique : Daprs la figure prcdente on peut calculer la f.e.m vide. On peut crire gomtriquement :
( ) ( )2220 sincos XIVRIVE +++=
R
E0
Z I
E0 V
I O
A B
C
D
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 8
III-5-3. Dtermination de la ractance synchrone
La ractance LX = sobtient laide de 2 essais : 1- Lessai vide ce qui donne le relev de la caractristique vide. 2- Lessai en court circuit qui seffectue comme suit : le stator de lalternateur est
mis en court-circuit sur un ampremtre qui sert mesurer le courant de court-circuit ICC. On excite lalternateur faiblement pour que le courant ICC soit de lordre du courant nominal, puis on trace le graphe de la courbe ICC=f(J) qui sera une droite passant par lorigine.
Aprs avoir effectu les 2 essais on reprsente sur le mme graphe les caractristiques : vide et en court-circuit.
Pour une excitation donn J lorsque la machine est non sature, la caractristique vide JKE .0 = et la caractristique de court circuit : JKIcc '.= , La f.e.m vide de lalternateur est: IZVE .0 += , en court-circuit V=0, ce qui donne limpdance synchrone calcule par
OAOB
IEZcc
== 0 , par consquent, on peut calculer la
ractance synchrone : 22 RZX =
J
E0 = f(J)
ICC = f(J)
O
A
B
Cou
rant
de
cour
t-circ
uit I
CC
Courant dexcitation J
ICC= f(J)
alNoCC II min
IC
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 9
III-5-4. Avantage et inconvnients du diagramme de Behn-Escenburg
Ce diagramme est trs simplifi qui donne des rsultats exacts pour les machines synchrones non saturs. Si on applique ce diagramme pour les machines synchrones satures, on trouve des chutes de tensions trop grande et si loignes de la ralit.
III-6. Diagramme de Potier
III-6-1. Principe
Quand lalternateur dbite un courant I, il faut pour maintenir constante la tension U entre ses bornes, lui fournir par lexcitation, un supplment de F.M.M parce que 3 phnomnes rentrent en jeux :
1- La chute de tension dans lenroulement dinduit RI . 2- La raction dinduit (gnralement soustractive) ; qui a pour effet de diminuer
le flux utile donc de diminuer la f.e.m. 3- Les fuites magntiques.
6-2. Coefficient dquivalence entre J et I
Ce diagramme tient compte de la saturation de la machine ; cest ainsi quil ne rassemble pas en une seule ractance X, celle de la raction dinduit Xi et celle des fuites magntiques x.
On admet que la machine nest jamais satur cause du flux de fuites (permabilit du vide est trs faible).
La ractance due la raction dinduit diminue avec des proportions importantes en fonction de la saturation (la ractance est en fonction de linductance).
Potier considre que la F.M.M longitudinale de la raction dinduit sajoute la F.M.M due lenroulement inducteur ; pour donner une F.M.M rsultante iJr FFF += Soit m : le nombre de spires inductrices pour ple, la F.M.M due lenroulement
inducteur est : JmFJ .= La F.M.M dinduit est proportionnelle au courant dinduit I.
soit .I : le courant, qui , passant dans les m spires de linducteur produirait la mme F.M.M que pourrait produire le courant I dans linduit ; et la FMM dinduit est donne par : ImFi ..=
IFi
FJ Fr
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 10
Soit rF la F.M.M rsultante due un courant rsultat dexcitation rJ circulant dans les mmes spires, cette F.M.M est donne par : rr JmF .= Comme iJr FFF += , on peut crire : IJJr .+= .
: sappelle coefficient dquivalence entre J et I .
6-3. Equation et reprsentation du diagramme de Potier
Ce diagramme permet de rsoudre directement le problme de la chute de tension sous la forme suivante : on considre V ; I et donnes, et il faut trouver indirectement le courant dexcitation correspondant J qui est ncessaire pour maintenir une tension constante aux bornes du stator une valeur V donne . Supposons dj dtermins les coefficients et x (ractance de fuites). Prenons le courant dinduit I comme origine des phases ; puis on trace la tension VOA = dphas de langle par rapport au courant (il dpend de la charge branche au stator). On trace ensuite IRAB .= en phase avec I, puis IxjBC ..= en avant de 90 par rapport au courant, ce qui donne IxjIRVEOC C ... ++== qui reprsente la f.e.m en charge.
Remarque
On peut pas tracer IXj i.. , car Xi nest pas constante puisque la machine est sature, ce qui ne nous permet pas de dterminer E0.
La F.M.M rsultante rr JmF .= est en phase avec le flux qui produit la f.e.m interne Ec , le courant rJ est reprsent par OCOD en avant de 2
.
Par lextrmit de D traons IFD ..= en phase avec le courant I. Comme IJJr .+= , le vecteur OF reprsente le courant inducteur J qui est ncessaire pour obtenir les conditions V , I et . Daprs la caractristique vide E0 (J) ; connaissant J, on en dduit E0.
I.I
J Jr
E0.I
J Jr
I O
A B
C
D
90
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 11
Remarque Si la machine ntait pas satur la f.e.m vide E0 est reprsente par OH (ce qui
correspond au diagramme de Behn-Escunburg) .
6-4. Dtermination des coefficients de Potier ( et x) a-lessai en dwatt :
Cet essai seffectue comme suit : lalternateur dbite sur un rcepteur purement inductif une vitesse normale : on agit sur le rcepteur Z (purement inductif) de faon obtenir pour diffrents valeurs de courant dexcitation J, les valeurs des tensions correspondantes V un courant dinduit I= constant ; ensuite, on trace la courbe reprsentant V en fonction de J.
b- digramme vectoriel :
Pour lessai en dwatt, en ngligeant RI, on peut crire : IxjVE ..+= Ce diagramme vectoriel a lavantage de conduire des relations arithmtiques ; soit : E=V+x.I et J=Jr+.I c- dtermination des coefficients (, x) :
On reprsente sur le mme graphe les 2 caractristiques E0 (J) et V(J) en dwatt. Pour un courant dexcitation donn Jr on a le
point A sur E0 (J) do lon titre E . Pour un courant dexcitions donn J on le point
A sur V(J) do lon titre V. Donc E=V+AH et J=Jr+AH, ce qui
donne :
IAHx = et
IHA'=
I.
Ixj ..
J rJ
V
E
I=90
O
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 12
Conclusion : On en dduit que lon passe de la caractristique vide la courbe en dwatt par une translation de A vers A tel que : une diminution de x.I de la f.e.m et une augmentation de .I du courant dexcitation. d-Dtermination pratique de et x : (figure prcdente)
1- On relve la caractristique vide E0(J) 2- On dtermine exprimentale un point A de la caractristique en dwatt pour un
courant donn I1 et pour une valeur quelconque de J 3- On reprsente la caractristique Icc (J) et grce I1 on dtermine le courant dexcitation
du court circuit (point :B de la courbe ) 4- On trace par A la parallle OB ; puis on dtermine O tel que OA = OB 5- On mne de O la parallle OB (la pente de la caractristique vide), qui coupe la
caractristique vide en A . 6- On trace AH perpendiculaire OA et on mesure : AH et AH. 7- Calculons les coefficients : AH
I et AH
I
III-7. Diagramme de Blondel
III-7-1. Principe
Le diagramme de Blondel est utilis pour les machines ples saillants. Dans la mthode de Potier, les fuites magntiques de linduit (termes Xi.I) ne
dpendent pas du dphasage entre I et la f.e.m de lalternateur. Cela est vrai pour les alternateurs ples lisses, mais il ne lest pas pour les machines ples saillants, pour cela tudions les 2 cas suivants lorsque le courant est maximal dans la bobine .
Dans la figure (a) : les lignes dinduction de fuites de linduit ont beaucoup dair (donc la ractance dinduit est constante ne dpendant pas de la saturation)
Dans la figure (b) : les lignes dinduction de fuites de linduit comportent beaucoup de fer ; (donc la ractance dpend de ltat de saturation de la machine).
Dans le cas o la machine est saturable, on peut dcomposer la F.M.M rsultante Fr en 2 autres composants : LTiJr FFFFF +=+= 1- Une composante longitudinale L due laction conjugue de la F.M.M due
linducteur et de la composante ractive du courant dinduit (Ir=I sin) Les lignes dinductions produites par cette F.M.M ont des trajets identiques ceux dune machine ples lisses. Sa ractance interne XiL dite ractance longitudinale dinduit est donc saturable qui se calcule par la mthode de Potier. 2- Une composante transversale due uniquement la composante active du courant
dinduit (Ia=I cos )
figure (a) figure (b)
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 13
Les lignes dinduction produites par cette F.M.M ont des trajets dans lair importants, cest pourquoi sa ractance interne XiT dite ractance transversale dinduit nest jamais saturable .
III-7-2. Equation de Blondel
Pour tenir compte de linfluence du dphasage sur les fuites magntiques, Blondel considre que la composante active du courant dinduit Ia=I cos en phase avec E (f.e.m interne) ajoute encore des fuites, il en rsulte une chute inductrice supplmentaire de fuites soit XiT.Ia = XiT.I.cos ; dautre part la composante ractive du courant dinduit Ir= I.sin produit une F.M.M longitudinale dont leffet est de modifier le flux rsultant (raction dinduit) . Donc lquation de Blondel (f.e.m de Blondel), scrit : . cest la f.e.m interne de Blondel.
III-7-2. Construction du diagramme de Blondel
Prenons le courant dinduit I comme origine des phases ; puis on trace la tension VOA = dphas de langle par rapport au courant (il dpend de la charge branche
au stator). On trace ensuite IRAB .= en phase avec I, puis IxjBC ..= en avant de 90 par rapport au courant.
Dans le prolongement de BC portons . , puis joignons O et F et par le point C , menons CD perpendiculaire OF.
On mesure OD : reprsente la f.e.m interne E de Blondel et : reprsente la f.e.m en charge ( IxjIRVEOC C ... ++== : f.e.m de Potier) Daprs le diagramme : :cest lquation de Blondel (cest une f.e.m longitudinale) Cette f.e.m interne existe toujours, elle ne dpend pas de la saturation. Pour tenir compte de la saturation, examinons les 2 cas suivants : a- Machine ples saillants non sature :
Dans ce cas XiT= constante et XiL=constante, on trace : et la f.e.m vide sera reprsente par :
I
Ia
Ir
IFi
FJ Fr
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 14
b- Machines ples saillants sature :
Dans ce cas XiT est toujours constante, mais XiL diminue avec la saturation ; donc la partie [OABCD] du diagramme ne change pas avec la saturation . Comme pour le diagramme de Potier, on a besoin de dterminer le courant dexcitation J avec V, I et donnes ; pour cela, on dtermine E de Blondel (vecteur OD) puis, en se reportant la caractristique vide on dtermine le courant dexcitation longitudinale qui doit tre perpendiculaire E de Blondel. Laction longitudinale des F.M.M sexprime par la relation arithmtique : J =JL+Ir III-8. Fonctionnement en charge de lalternateur
On entraine lalternateur une vitesse de synchronisme et on la maintient constante (nS=Constante ; sa tension V ( par phase ) sera fonction de 3 paramtres : V = f(I, J, ). Dans la pratique on se limite la reprsentation de 2 familles de courbes : 1- Caractristiques externes : V =f(I) J =constante et cos =constante. 2- Courbes de rglages : J = f(I) V = constante et cos =constante.
III-8-1. Caractristiques externes
Pour simplifier, on prend le cas dune machine non sature (diagramme de Behn Eschenburg) et en ngligeant la rsistance dinduit on aura le diagramme suivant :
( ) ( )2220 sin cos XIVVE ++= ( ) sin...22220 VIXXIVE ++= ( ) sin...22202 VIXXIEV = Etudions cette fonction V=f(I) en prenant comme paramtre :
I O
A B
C
D
90
G
F
.Ir J JL
I O
B
D
90
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 15
a- Pour Cos =1, la courbe est une ellipse dont les axes concident avec les axes de coordonnes.
b- Pour Cos =0, la courbe est une droite de pente -X, qui coupe laxe des intensits au point I=E/X
c- Pour les dphasages du courant en arrire sur la tension V, les courbes sont des arcs dellipses compris entre les courbes prcdentes.
d- Pour les dphasages du courant en avant sur la tension V, les arcs dellipses sont lextrieur, dans ce cas on observe un phnomne de surtension (V> E).
III-8-2. Courbes de rglages : J=f(I)
Pour une machine non sature lquation : 2 la courbe reprsentative est une hyperbole. a- Pour Cos =0 : cest une droite de pente positif. b- Pour Cos =1, lhyperbole est symtrique par rapport laxe E c- Pour des dphasages quelconque on aura de hyperboles.
III-9. Rendement de lalternateur
III-9-1. Dfinition Le rendement est le rapport de la puissance utile (Pu) fournie au circuit dutilisation et
la puissance absorbe Pa :
O Pa : est la puissance mcanique absorbe + puissance ncessaire lexcitation. Pu : est la puissance lectrique fournie au stator. On distingue 2 mthodes pour la dtermination du rendement :
a- Mthode directe : Cette mthode a lavantage de donner le vrai rendement mais elle prsente
linconvnient suivant : ncessit des essais en charge et mesure de la puissance mcanique. b- Mthode indirecte :
Cette mthode donne un rendement approch, mais malgr cet inconvnient, elle est plus utilise car elle permet dobtenir le rendement pleine charge. La mthode indirecte consiste mesurer toutes les pertes et de calculer le rendement par la formule :
Remarque Pu : la puissance lectrique active fournie un stator 3 3. . (Couplage en toile ou en triangle) Pa=pu+ pertes
-
Chapitre 3 Alternateur Autonome
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 16
III-9-2. Enumration et dtermination des pertes
a- Pertes constantes :
1-pertes mcaniques (pm ): ces pertes dpendent de la vitesse de rotation nS. On dtermine ces pertes par la mthode suivante : on manchonne lalternateur, un moteur lectrique dont on connait son rendement. On fait tourner lalternateur sa vitesse de synchronisme, sans excitation puis, on mesure la puissance mcanique W1 que le moteur fournit lalternateur qui sera : pm= W1 2-pertes fer : (pf) : On excite lalternateur vide et on mesure la puissance mcanique W2 que le moteur fournit lalternateur et qui sera gale W2=pm+pf 3-pertes par effet Joule (dans linducteur) : elles se calculent par : Pexc=U. J= ctr U : la tension dalimentation de linducteur en courant continu (elle est constante). b-Pertes variables : elles dpendent de la charge donc du courant dinduit I ; ce sont les pertes par effet Joules : Pj=3.R.I2 I : courant dune phase (le courant simple) ; R : rsistance dune phase. III-9-3. Expression du rendement : (systme triphas) Pu=3.V.I. cos ; PJ=3.R.I2=. I2 = Pm+Pf+Pexc le rendement se calcule par :
Remarque:
Pour obtenir le rendement maximal, on calcule : 0,
ce qui donne : =I2 C'est--dire quon a un rendement maximal lorsque :
pertes constantes = pertes joules
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 1
Chapitre V. THEORIE DES MACHINES ASYNCHRONES
(MACHINES A INDUCTION)
V-1. Dfinition
On appelle machine asynchrone, une machine lectrique de vitesse variable, courant alternatif, qui 2 enroulements dont un seul (le primaire) est aliment par un rseau lectrique de pulsation ; alors que la 2me (le secondaire) est ferm sur lui-mme ou sur des rsistances lectriques, gnralement ce type de machines est plus utilise en moteur asynchrone (en triphas). V-2. Constitution du moteur asynchrone
Ce type de moteur est bas sur lenroulement dune masse mtallique par laction dun champ tournant et comportant 2 armatures coaxiales lune est fixe appele stator et lautre est mobile appele rotor ; entre les 2 armatures il y a lentrefer.
V-2-1. Stator (inducteur) Cest un anneau de tles encoch lintrieur et portant un enroulement triphas
semblable celui dune machine synchrone. Cet enroulement est presque toujours reli la source dalimentation, il constitue le primaire. Lenroulement est aliment en triphas par lintermdiaire de la plaque bornes de la machine, ce qui le permet de lalimenter en couplage d ou en (figure suivante).
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 2
V-2-2. Rotor (induit)
Cest un anneau de tles rainur lextrieur, concentrique au stator et spar de lui par un entrefer constant. Le rotor porte un enroulement polyphas mis en court-circuit constituant ainsi le secondaire. Le courant dans ses enroulements est induit uniquement par le champ statorique, car le rotor nest li aucune source lectrique extrieure ; on distingue 2 types de rotor :
a- Rotor bagues (rotor bobin)
Cest un rotor ples lisses qui comporte dans ses rainures, un enroulement identique celui du stator. Le couplage de cet enroulement est toujours en toile, le centre de ltoile nest pas accessible mais les 3 extrmits libres sont relies 3 bagues cales sur larbre (bobinage triphas) sur laquelle appuyant 03 balais (charbon) pour avoir accs aux phases rotoriques par lintermdiaire dun rhostat qui est utilis pour assurer les meilleures conditions du dmarrage.
b- Rotor cage dcureuil (rotor en court-circuit)
Lenroulement est remplac par des barres en cuivre ou en aluminium loges dans des encoches et runies leurs extrmits par 2 couronnes en cuivre ou en Aluminium. Gnralement, ces barres sont inclines afin de rduire les harmoniques de dentures.
Le courant qui passe par une barre revient par la barre situ une distance polaire et il nest pas ncessaire disoler les barres de la masse du rotor, car les courants induits stablissent surtout dans les barres (rsistivits diffrentes : beaucoup plus faible pour le cuivre).
Par comparaison avec les moteurs bagues, les moteurs cage ont lavantage dtre robuste et de cot beaucoup plus faible ; mais ils prsentent linconvnient qui est limpossibilit de faire varier la rsistance du rotor, ce qui rend dfavorable les conditions de dmarrages avec la tension du rseau.
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 3
V-3. Principe de fonctionnement
Lenroulement statorique (primaire) reoit de lnergie lectrique du rseau de pulsation , ce qui cre un champ tournant la vitesse angulaire synchrone
(voir thorme
de Maurice Leblanc) ; ce champ, en balayant les enroulements rotoriques (secondaires) y induit des f.e.m et donc des courants, car les spires sont fermes sur elles-mmes. Ces courants induits produiront leur tour un champ qui sera de sens oppos au champ du stator (daprs la loi de Lenz : la f.e.m induite tend sopposer la cause qui la produite).
La raction du courant secondaire sur le champ primaire provoquera un couple moteur qui entrainera la mise en mouvement du rotor dans les sens du champ tournant primaire. A fin et mesure que le rotor augmentera sa vitesse de rotation, la diffrence entre la vitesse angulaire du champ tournant et la vitesse angulaire du rotor diminuera. Et la pulsation des courants secondaires diminuera aussi : =-1 : pulsation du champ statorique. 1 : vitesse (mcanique) de rotor.
V-4. Bobinages du stator et du rotor
Pour le rotor bagues, lenroulement du rotor ne diffre pas de lenroulement du stator. La diffrence cest que les extrmits de lenroulement stator aboutissent des bornes, par contre les extrmits de lenroulement rotoriques aboutissent des bagues. Remarque :
Tous les modes denroulements que nous avons dcrits propos des machines synchrones sont valables et applicables aux enroulements statoriques et rotoriques des machines asynchrones.
V-5. Vitesse du moteur asynchrone
V-5-1. Dfinition du glissement
Soit nS : la vitesse de rotation du champ tournant ou vitesse de synchronisme : nS
n : la vitesse de rotation du rotor (mcanique) ; le glissement est dfinit par :
x100 [%]
Cette valeur relative prcise la rapidit du glissement de londe de champ statorique par rapport au rotor.
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 4
V-5-2. Rgime de fonctionnement dune machine asynchrone
a- Fonctionnement en moteur :
Cas limites : - au synchronisme donc : 0 - au dmarrage 0 donc : 1 Ce qui donne : 1 0 Pour le fonctionnement moteur n est en retard par rapport ns (nns donc 0
c- Fonctionnement en frein lectrique : La machine fonctionne en frein, lorsque la vitesse n est ngative par rapport ns ; c'est--dire que le rotor tourne dans le sens inverse par rapport au champ tournant statorique.
Cas limites : - larrt 0 donc : 1 - lorsque la vitesse dpasse la vitesse de synchronisme n donc : ce qui donne : 1 On peut rsumer ce qui suit :
V-6. Fonctionnement vide
V-6-1. Courant vide
Raisonnons sur un moteur asynchrone triphas bagues. Supposons que le rotor est larrt et les bagues sont ouvertes. En dmarrant le stator, on aura un champ tournant statorique, prlevant du rseau un courant trs faible quon appelle courant vide I0 ; qui sera en phase avec le flux : Soient : V1 : la tension du rseau (simple). I0 : courant vide par phase. L1 : inductance cyclique du moteur X=L Si on nglige les pertes on aura : V1=L1I0 donc :
Glissement (g)10 MoteurGnratrice Frein
n
nnS
nS nS
n
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 5
V-6-2. f.e.m induite par phase du stator :
Soit =0 sin t : le flux qui traverse chaque spire du stator ; la f.e.m induite par phase a pour expression :
cos avec N1 : nombre de spires statorique.
4,44 .
Remarque :
1- Cest la mme formule que pour le primaire dun transformateur. 2- Cette f.e.m est thorique, si on veut calculer la f.e.m relle on doit la multiplier par le
coefficient de bobinage. (tudi pour les machines synchrones).
V-6-3. f.e.m induite dans le rotor par le champ tournant du stator
Etudions les 2 cas suivants: a- Rotor immobile :
Cette f.e.m est identique celle qui est induite au stator, elle aura pour expression : E20=4,44 N2f avec : N2=nombre de spires dans le rotor. Dans ces conditions le moteur asynchrone se comporte exactement comme un transformateur parfait dont le rapport de transformation est :
b- Rotor en rotation (mouvement) :
Soient : - f1 : la frquence du rseau (donc du champ statorique) nS
- f2 : la frquence du courant induit dans le rotor (donc du champ rotorique)
Si n : la vitesse de rotation du rotor (mcanique) : vitesse relative du champ tournant par rapport au rotor. Le glissement est :
, donc : , ce qui donne :
Do : La f.e.m sera alors : E2=4,44 f2 .N2=4,44gf1N2do:E2=gE20 Remarque : Rotor est immobile : 1, donc : , on aura : E2= 4,44 N2f E20 V-7. Fonctionnement en charge
Mettons les bagues du rotor en court circuit ; le rotor est entrain sa vitesse normale. La tension induite E2 par le champ tournant statorique va engendrer dans le rotor des courants de frquence gf1 ; ces courants vont engendrer leur tour un champ tournant rotorique de frquence gf1 par rapport au rotor, ou bien de frquence f1 par rapport au stator.
donc :
n : vitesse du rotor par rapport au stator.
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 6
ns : vitesse du champ statorique. n2 : vitesse du champ rotorique par rapport au rotor. La vitesse du champ par rapport au stator sera : n2+n=ns-n+n=ns. Donc le champ tourne avec la mme vitesse ns par rapport au stator (condition pour avoir un couple).
Les 2 champs se superposent et on aura un champ rsultant , ce champ produit dans chacune des spires du stator et du rotor un flux alternatif . En ngligeant la rsistance et linductance de fuites dans les phases du stator on aura : V1E1=4,44fN1. Conclusion : Quelle que soit la charge de la machine, et pour une tension statorique V1=constante ; le flux est toujours constant. Relation entre courant vide et le courant en charge
F.M.M vide F0=R=N1I0 N1 : nombre de spire du stator et I0 : courant vide circulant dans lenroulement statorique.
F.M.M en charge F=R=N1I1+N2I2 (mme flux car V=Constante donc =constante). I1: courant circulant dans lenroulement statorique en charge, N2 : nombre de spires du rotor du moteur et I2 : courant circulant dans lenroulement rotorique
R=constante donc : , ce qui donne :
do :
;
Si nous posons et ; ce qui donne :
cest la mme relation dun transformateur. V-8. Circuit quivalent
V-8-1. Machine larrt
A larrt un moteur asynchrone se comporte exactement comme un transformateur dont lenroulement secondaire a comme rsistance R2 et une ractance X2 =L22 1=2=2f.
V-8-2. Machine en marche normale
- La frquence des courants statoriques f. - La frquence des courants rotoriques f2=gf
En charge, il ya un courant qui circule dans lenroulement rotorique I2 qui se calcule par
avec Z2=R2+jL22=R2+jx2 : : f.e.m en charge dans le rotor (rotor en mouvement).
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 7
x2=L22=L2.2f2=L22gf1=gX2 avec : X2=L2 On a E2=gE20, ce qui donne :
ce qui donne:
Conclusion :
Le moteur asynchrone est quivalent un transformateur statique dont le secondaire est suppos sans rsistance et de ractance X2 alimentant une charge variable
Remarque :
Si on tient couple de la rsistance rotorique, la charge sera :
V-8-3. Rappel du circuit quivalent dun transformateur : Les quations du transformateur : Primaire (rcepteur) : Secondaire (gnrateur) : on a
En combinant les deux quations du transformateur, et en posant :
;
et
, on aura :
. , ce qui donne :
Le circuit quivalent correspondant cette dernire quation c'est--dire le secondaire ramen au primaire est le suivant :
Le courant vide I0 se divise en 2 branches, lune RF absorbe la composante active qui est due aux pertes dans le fer ; lautre Xm absorbe la composante ractive qui est ncessaire pour entretenir le flux.
1
U2
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 8
V-8-4. Circuit quivalent du moteur asynchrone Le moteur asynchrone est quivalent un transformateur dont le circuit quivalent est
tablie de telle faon ramener les lments rotoriques au stator avec :
rsistance rotorique ramene au stator avec :
inductance rotorique ramene au stator
E20 =
f.e.m induite dans le rotor ramene au stator :
Le circuit quivalent sera alors : V-9. Bilan nergtique dun moteur asynchrone
V-9-1. Puissances
Le moteur absorbe du rseau la puissance Pa=3.V.I1.cos 1 ; travers les bornes
statoriques ; une partie de cette puissance(1 2 %) est perdue dans le stator sous forme de pertes fer (pertes magntiques) Pf et de pertes dans le cuivre due leffet joules Pjst (Pjs=3RI2). La puissance restante (Pe.) est alors transmise au rotor par le champ tournant sous forme de puissance lectromagntique.
Le rotor utilise cette puissance Pe pour 2 utilisations :
Une partie est gaspille sous forme de pertes par effet joules rotoriques (P rot). Lautre partie se retrouve sous forme de puissance mcanique, quon appelle puissance utile (Pu) disponible larbre du moteur Pe=Pu+Prot On peut ngliger dune part, les pertes fer rotoriques car elles dpendent de la frquence rotorique qui est trs faible et dautres part les pertes mcaniques.
V-9-2. Pertes rotoriques dun moteur asynchrone
Soit C : couple utile sur larbre du moteur qui est d laction des champs statoriques et rotoriques. Soit n : la vitesse mcanique du rotor 2 la puissance lectromagntique Pe= 2nsc les pertes dans le rotor :prot =Pe-Pu=2c(ns-n)
; on remplace dans 2 . do :
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 9
V-9-3. Calcul du rendement dun moteur asynchrone
Comme le rendement est calcul daprs :
(pertes statoriques
ngligeables)
donc : 1
do : 1 V-10. Caractristiques mcanique
Pour simplifier posons I00, comme donc :
Daprs le schma prcdant : I1=I2=
Analyse du circuit quivalent simplifi : Daprs le schma, on peut considrer les pertes dans le rotor par Prot=3R2I22 La puissance utile Pu (puissance mcanique) Pu=R
I
La puissance lectromagntique transmise Pe=Pu+Prot 3
ce qui entraine :
V-10-1. Calcul du couple
. , comme
.
Posons X1+X2=X : ractance cyclique de fuites total ramene au primaire. Ngligeons R10 car
Ce qui donne : .
Daprs cette relation prcdente, on voit que le couple c varie en fonction du glissement g (donc de la vitesse n) et la caractristique mcanique sera C=f(g) ou C=f(n). - Au dmarrage n=0 donc : g=1, le couple de dmarrage ou de dcollage peut tre calcul
par :
- On peut calculer le couple maximal par :
0, ce qui donne :
, le couple
maximal sera alors :
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 10
Remarques :
1- La courbe c(g) prsente 2 branches, lune stable comprise entre g=0 et gcrit ; lautre partie est instable gcritg1
Si le couple dpasse CM ; le moteur sarrte (il dcroche). 2- Le moteur asynchrone peut supporter des surcharges de courtes dure qui correspond
un couple normal 0,2 CM CM0,4 CM
3- Puisque CM=
est indpendant de la rsistance R2 ; on peut augmenter gcrit en
augmentant la rsistance R2 sans faire changer ce couple maximal .
4- Le couple CM =
est proportionnel directement (sensible) la tension dalimentation V1 ; par contre pour le moteur synchrone CM=
5- On peut reprsenter la caractristique mcanique par n=f(c), ou encore C=f(n).
6- Formule de Kloss :
Lexpression du couple en fonction du glissement : .
,
le couple maximal a comme expression :
X
X X
Couple
Vite
sse
de ro
tatio
n
CM Cd Vitesse de rotation nS
Cd
CM
CN
nNncrit
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 11
3.
.23
2
Puisque : g R
, on aura :
crit
critMm
gg
ggC
CK
+== 2 : cest la formule de Kloss.
V-11. Diagramme du cercle
V-11-1. Diagramme de cercle simplifi
Soit le circuit quivalent simplifi ;(circuit rotorique ramen au primaire). On nglige R1 et X1I0 et les pertes fer (RF0). I1 : courant statorique I2 = -mI2 (m=
) courant de travail (rotorique). I0 : courant statorique de magntisation (courant vide)
Daprs la figure prcdente, on peut crire : V
. ; on peut dterminer le
dphasage 2 entre V1 et le courant I2 :
ou bien :
Daprs langle 2 ; on peut tracer le diagramme vectoriel de I1=I0+I2
Comme V
. , la valeur du courant de travail (I2) se calcule par :
I
Daprs la relation prcdente on voit que le courant I2 est en fonction du glissement (donc de la vitesse). En gardant I0 constant ; le point M de la figure prcdente change de position en fonction de la vitesse ; et avec plusieurs points de fonctionnement ; le point M dcrit un cercle.
X
X0 V1
I1 I0
I2
V1
I0
I1 I2
M
2
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 12
Daprs la figure prcdente :
et dautre part :
donc :
; ce qui donne :
M0M1 sont fixer ; M charge de position sur le cercle de diamtre M0M1
Conclusion : Lensemble de point M sappelle diagramme de cercle qui nous renseigne sur toutes les grandeurs intervenant dans le fonctionnement du moteur asynchrone ; savoir :
1- Courant statorique : I1 : valeur efficace I1= et ,
2- Couple lectromagntique Ce
Pe=2nsCe en ngligeant les pertes statoriques PaPe on peut crire : 3 2 ce qui donne :
Dans la figure prcdente : Ia=OC ; pour dterminer ce couple lectromagntique ; on mesure OC lchelle, et on multiplie par la constante K.
3- Glissement g : Daprs la figure prcdente : (dans le tringle :M0M1G) :
dautre part :
ce qui donne :
.
.
do :
Il suffit de mesurer lchelle pour dterminer g.
4- Courant rotorique I2 : on peut calcule
avec
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 13
5- Droite des puissances : La puissance utile sur larbre du moteur est nulle au dmarrage (vitesse nulle g=1) point Md (sur la figure) et au synchronisme (g=0 ns) point M0 (sur la figure) Donc la droite M0Md reprsente la droite des puissances utiles . On peut dterminer la puissance utile pour nimporte quel point M de fonctionnement et cela en mesurant MN (sur la figure) lchelle.
V-11-2. Diagramme de cercle normalis par lU.T.E (Union technique des lectriques).
a- Etapes suivre pour tracer le diagramme : 1. On choisit une chelle de courant : 1mm aA
2. On effectue un essai vide :
Le moteur tourne vide la vitesse de synchronisme, ou relve lintensit I0 et la puissance P0 ; puis on calcule le facteur de puissance par : cos
On reprsente le point M0 tel que Avec : ,
3. On pratique un essai en circuit larrt (g=1) tension rduite :
Supposons quon alimente sous sa tension normale V1 ; le moteur asynchrone aprs avoir court-circuit et caler le rotor ; le moteur est alors un vritable transformateur avec son secondaire en CC. Dsignons par : Pcc : puissance absorbe en cc. I1cc : courant absorbe en cc. V1cc : tension statorique pour lessai en cc. On calcule alors le facteur de puissance par : cos
Si le courant de court-circuit Id pour la tension V1. Et le courant de court-circuit I1cc pour la tension V1cc. On admet que
ce qui donne :
. : cest le courant de dmarrage.
-
Chapitre 5 Thorie des Machines Asynchrones
Dr. Bendaoud- Universit de Sidi Bel Abbs Machines lectriques courant alternatif 14
On peut reprsenter le point M1 tel que
,
4. Le centre du cercle est dcal par rapport lhorizontale passant par M0 dun
petit angle donn par la relation suivant :sin
R1 : rsistance statorique. Remarque : Langle est ngligeable pour les moteurs de grandes puissances.(P15kW)
5. Dtermination du centre de cercle () : Cest lintersection entre la mdiatrice de M0M1 et la droite dcal de langle par rapport lhorizontale passant par M0.
6. On reprsente la droite des puissances utiles par la droite M0M1 M0(g=0 synchronisme) et M1(g=1 dmarrage).
7. On reprsente la droite des couples par la droite M0M M0(g=0 et c=0) et M(g ).
Dtermination de cette droite : On trace la verticale passant par M1 ; lintersection de cette verticale avec lhorizontale passant par M0 est K1.
On calcule L1K1 tel que L1 appartient la droite des couples :
On joint le point M0 avec L1 ce qui donne la droite des couples.
8. Reprsentation de la droite des glissements : Toute droite parallle M0M (droite des couples) peut tre gradu linairement en glissement ; en commenant par g=0 appartenant la tangente au point M0. b- Exploitation du diagramme de cercle :
On trace une verticale passant par un point de fonctionnement quelconque M :
MH : reprsente la puissance absorbe Pa. MN : reprsente la puissance utile Pu. ML : reprsente la puissance lectromagntique Pe. NL=ML-MN=Pe-Pu=pertes rotoriques. KH : pertes mcaniques. LK : pertes statoriques.
-
Chapitre VI : Performances des moteurs asynchrones
1. Introduction :
Les performances des moteurs asynchrones concernent les domaines suivants : Dmarrage, variation de la vitesse, freinage et inversion de sens de rotation. Si lon compare le moteur asynchrone au moteur shunt, on constate que les caractristiques mcaniques dans leurs parties stables sont identiques, ce qui conduit aux mmes applications industrielles.
2. Avantages du moteur asynchrone :
Le moteur asynchrone compar au moteur shunt a lavantage dtre aliment directement par le rseau triphas, son cot est moins lev, il est beaucoup plus robuste car il ne ncessite pas pratiquement dentretien.
Si on compare les 2 types de moteur asynchrone, le moteur bagues a plus de possibilit car il peut tre aliment par son stator ou son rotor. Mais malgr cet avantage cest le moteur) cage en raison de sa trs grande robustesse qui est le plus utilis dans lindustrie.
3. Inversion de sens de rotation
Il suffit de croiser 2 des 3 fils dalimentation au stator, ce qui inverse le sens de rotation du champ tournant et par la suite le sens de rotation du moteur.
4. Dmarrage des moteurs asynchrones triphass
Au dmarrage des moteurs asynchrones se posent 2 problmes :
- Un faible couple de dmarrage cd - un fort courant de dmarrage Id
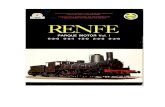
a- Dmarrage direct
Ce type de dmarrage est rserv aux moteurs de faible puissance devant celle du rseau, ne ncessitant pas une mise en vitesse progressive. Le couple est nergique, l'appel de courant est important ( 5 8 fois le courant nominal ).
2
2
3 3
1
-
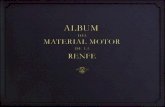
b- Dmarrage toile - triangle
Ce type de dmarrage est rserv aux machines dmarrant vide ou dont le couple rsistant est faible. L'intensit de dmarrage est divise par 3, mais le couple de dmarrage aussi (proportionnel au carr de la tension d'alimentation des enroulements).
2
-
c. Dmarrage statorique
Ce type de dmarrage a des caractristiques comparables au dmarrage toile - triangle. Il n'y a pas de coupure de l'alimentation du moteur entre les deux temps de dmarrage.
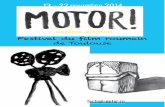
d. Dmarrage rotorique Le courant de dmarrage est limit, sans que le couple soit rduit. Ce type de dmarrage ncessite un moteur bagues (rotor bobin).
3
-
Le couple peut tre calcul par lexpression suivante : le couple ne dpend que du rapport R2/g.
+
=2'
2'2
'22
13
XgR
gR
VpC
Au couple maximal constant (Cmax= 2 CN), on peut crire :
12
1
2
3
1
21 ..........1
=====n
n
n
n
gR
gR
gR
gRR
, ce qui donne : m
rotor
n
n
gR
gR
R ==1
1
Pour la mme rsistance on peut crire :
n
n
n
n
N
M
gg
gg
gg
gg
gCC
K 11
2
3
2
2
1
1
..........1
=======
r1 r2 r3 r4
R2
R5=Rrot R4
R3
R1
Moteur asynchrone Rhostat
4
-
nn
n
n
nn
ggg
gg
gg
gg
gK
1............
1 11
2
3
2
2
1
1
== , ce qui donne le nombre de plots
kLoggLog
n n=
Au couple nominal constant (CN), on peut crire :
n
n
n
n
gR
gR
gR
gR ====
1
1
2
2
1
1 .......... , ce qui donne : K
RR
gg
R nnn
nn
11
1
==
Remarques :
1- Cmax et Cmin sont fixs par le cahier des charges, g2 et g3 sont dtermins sur la caractristique " naturelle " du moteur. Connaissant la valeur de la rsistance du bobinage rotorique Rrot, on dtermine les valeurs des rsistances de dmarrage.
2- Si le nombre de plots nest pas un entier naturel, on prend le nombre entier naturel suprieur puis on recalcule la constante K et on continu le calcul pour le rhostat du dmarrage par la mme mthode.
e. Constructions spciales
Moteur double cage
La cage externe est plus " rsistive " (laiton) Rext> Rint et Rext> Xext, la cage interne prsente une inductance plus leve Xint> Xext (qui dpend de la longueur des lignes magntiques). Au dmarrage, le moteur se comporte comme un transformateur : la frquence des courants rotoriques est leve (50Hz). Le courant circule essentiellement dans la cage externe, car l'impdance de la cage interne (L.w ) est plus leve.
Au fur et mesure que la vitesse du moteur augmente, la frquence des courants rotoriques diminue, le courant circule progressivement dans la cage interne.
Car Xint >Rint
5
-
5. Freinage
a. Freinage par contre - courant
Lors du freinage, il y a ouverture de KM1 puis fermeture de KM2 : le moteur est aliment par un champ statorique inverse. Les pointes de courant sont trs importantes et il est conseill d'insrer un jeu de rsistances pour limiter ce courant. KM2 doit s'ouvrir ds l'arrt du moteur, pour viter un redmarrage en sens inverse : il est donc ncessaire de prvoir un capteur dtectant l'absence de rotation (capteur centrifuge).
b. Freinage par injection de courant continu Au moment du freinage, KM1 s'ouvre puis KM2 se ferme. Un courant continu est envoy dans le stator. Le moteur se comporte comme un alternateur dont l'inducteur est constitu par le stator, l'induit par le rotor en court - circuit.
c. Moteur frein Le moteur est muni d'un frein lectromagntique disque mont du ct oppos l'arbre
6
-
de sortie. En l'absence de courant (ouverture de KM1 ou coupure du rseau), un ressort de rappel permet d'assurer le freinage. C'est un lment important de scurit, en particulier dans les applications de levage.
6. Rglage de la vitesse de rotation des moteurs asynchrones triphass
Introduction
La pulsation du rotor d'un moteur asynchrone est :
avec g : glissement p : nombre de paires de ples
: pulsation du rotor (en rd/s) s : pulsation de synchronisme(en rd/s)
f : frquence de la tension (Hz) : pulsation de la tension (rd/s)
Le rglage de la vitesse de rotation du moteur peut donc tre obtenu par :
1-Action sur le nombre de paires de ples
machines bobinage primaire unique machines plusieurs bobinages primaires (machines enroulements spars)
2- Action sur la frquence de la tension d'alimentation statorique
convertisseurs de frquence lectromcaniques (gros alternateur pilotant plusieurs moteurs asynchrones tournant la mme vitesse)
convertisseurs statiques (onduleurs de courant, de tension, M.L.I, contrle vectoriel de flux, cycloconvertisseurs)
7
-
3- Action sur le glissement
action sur la tension d'alimentation statorique (autotransformateur, gradateur) rhostat de glissement au rotor cascade de rcupration (cascade hyposynchrone)
Ce rsultat montre qu'il est possible d'obtenir le couple maximal, pour diffrentes vitesses de rotation, condition que le rapport tension d'alimentation / frquence de la tension soit constant ( U / f constant).
a- Action sur le nombre de paires de ples Couplage d'enroulements Principe : ce type de moteur possde 2 bobinages distincts par phase, qui peuvent tre coupls en srie (4 ples) ou en parallle (2 ples).
b. Action sur la frquence de la tension statorique Le convertisseur statique de type " onduleur " permet un fonctionnement du moteur avec un couple maximal, par action simultane sur la frquence et sur l'amplitude de la tension statorique, avec conservation du rapport U/f
8
-
Convertisseur onde de tension
Le filtre L-C, associ au pont redresseur diodes constitue une source de tension. L'onduleur transistors gnre une succession d'impulsions de tension, le moteur, inductif par nature, lisse le courant. Ce dernier est pratiquement sinusodal.
9
-
Ce type de pilotage permet un excellent contrle des paramtres couple et vitesse. Le couple est trs lev (suprieur au couple nominal) mme vitesse nulle.
Cycloconvertisseur : C'est un convertisseur de frquence, dont la frquence de sortie est faible devant celle du rseau d'alimentation (1/3 maximum). Le montage complet ncessite 36 thyristors pour une machine triphase. Etude simplifie pour une phase du moteur :
c. Action sur le glissement
Gradateur : L' action se fait sur la tension statorique.
Du fait de sa faible plage de variation de vitesse sur moteur cage standard, le gradateur statorique est surtout utilis comme procd de dmarrage sur des machines dont le couple rsistant est de type parabolique.
Rhostat de glissement rotorique : Cette technique est utilise sur moteur rotor bobin.
10
-
Le couple peut tre maximal dans toute la plage de variation de vitesse, mais les pertes dans le rhostat rotorique sont d'autant plus importantes que la vitesse du moteur est faible.
Cascade hyposynchrone : Cette technique est utilise sur moteur rotor bobin.
Le transformateur est choisi avec un rapport de transformation permettant le glissement maximal souhait. La rcupration de l'nergie rotorique assure un excellent rendement, voisin de celui du moteur seul. Le facteur de puissance de la cascade est plus faible que celui du moteur seul et il y a ncessit de le relever avec une batterie de condensateurs. La cascade ne peut dmarrer seule : il est ncessaire de prvoir un dispositif annexe de dmarrage par rsistances rotoriques.
11