Physics 111 Lecture 09 Rotation, Moment of Inertia SJ 8th Ed.: …janow/Physics 111 Spring...
25
Copyright R. Janow – Spring 2012 Physics 111 Lecture 09 Rotation, Moment of Inertia SJ 8th Ed.: Chap 10.1 – 10.5 • Introduction and Overview • Particles versus Rigid Bodies • Rotational Variables – Angular Position and Displacement – Angular Velocity and Acceleration • Relating Linear and Angular Variables Angular Kinematics (constant angular acceleration) • Kinetic Energy of Rotation • Calculating Moment of Inertia – Definitions – Parallel Axis Theorem – Examples 10.1 Angular Position, Velocity, and Acceleration 10.2 Rotational Motion with Constant Angular Acceleration (Rotational Kinematics) 10.3 Angular and Translational Quantities 10.4 Rotational Kinetic Energy 10.5 Calculation of Moments of Inertia Add: example 10.5
Transcript of Physics 111 Lecture 09 Rotation, Moment of Inertia SJ 8th Ed.: …janow/Physics 111 Spring...

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Physics 111 Lecture 09
Rotation, Moment of Inertia
SJ 8th Ed.: Chap 10.1 –10.5
•Introduction and Overview
•Particles versus Rigid Bodies
•Rotational Variables
–Angular Position and Displacement
–Angular Velocity and Acceleration
•Relating Linear and Angular Variables
Angular Kinematics (constant angular
acceleration)
•Kinetic Energy of Rotation
•Calculating Moment of Inertia
–Definitions
–Parallel Axis Theorem
–Examples
10
.1A
ng
ula
r P
os
itio
n,
Ve
loc
ity,
an
d A
cc
ele
rati
on
10
.2R
ota
tio
na
l M
oti
on
wit
h C
on
sta
nt
An
gu
lar
Ac
ce
lera
tio
n (
Ro
tati
on
al
Kin
em
ati
cs
)
10
.3A
ng
ula
r a
nd
Tra
ns
lati
on
al
Qu
an
titi
es
10
.4R
ota
tio
na
l K
ine
tic
En
erg
y
10
.5C
alc
ula
tio
n o
f M
om
en
ts o
f In
ert
ia
Add
: e
xam
ple
10
.5

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
2
2
dt
rd
dtv
da
am
Fext
≡ ≡≡≡≡ ≡≡≡
= ===∑ ∑∑∑
)z,
y,x(
r= ===
r
2
21m
vK
tran
s= ===
•P
AR
TIC
LE
S (
LIN
EA
R M
OT
ION
)• •
RO
TA
TIO
N I
S M
EA
NIN
GL
ES
S•
Ze
ro s
ize
, s
ha
pe
un
de
fin
ed
–T
ran
sla
tio
n o
nly
fo
r p
art
icle
s
–C
M f
or
syste
ms o
f p
art
icle
s
•S
pe
cif
y p
os
itio
n b
y 3
sp
ati
al c
oo
rdin
ate
s.
• • •3
ve
loc
ity a
nd
3 a
cce
lera
tio
n c
om
po
ne
nts
•F
orc
es
an
d i
ne
rtia
go
ve
rn m
oti
on
•M
ass
m m
eas
ure
s in
ert
ia –
acce
lera
tio
n i
s
the
res
po
ns
e t
o f
orc
es
•T
ran
sla
tio
na
l k
ine
tic e
ne
rgy
•E
ne
rgy c
on
se
rve
d i
n i
so
late
d s
ys
tem
s•
Mo
me
ntu
m p
= m
v c
on
se
rve
d w
he
n n
et
ex
tern
al
fo
rce
= 0
.
Particles versus “Rigid Bodies”
A “rigid body’s”size and shape don’t change
POINT BODIES UNTIL NOW
2
2
dt
d
dt
d
I
ext
θ θθθ≡ ≡≡≡
ω ωωω≡ ≡≡≡
α αααα ααα
= ===Τ ΤΤΤ
∑ ∑∑∑r
rr
r
IK
KK
K
ro
tro
ttr
an
sto
t2
21ω ωωω
= ===+ +++
= ===
•R
IGID
BO
DIE
S
(AD
D R
OT
AT
ION
)
•R
OT
AT
ION
CR
ITIC
AL
TO
MO
TIO
N•
Sh
ap
e, s
ize
, &
ori
en
tati
on
aff
ec
t m
oti
on
–C
en
ter
of
Mass (
CM
) m
oves lik
e a
part
icle
–C
M t
ran
sla
tio
n +
ro
tati
on
ab
ou
t axis
•S
pe
cif
y p
os
itio
n +
ori
en
tati
on
:
A
dd
3
rota
tio
na
l c
oo
rdin
ate
s:
θ θθθa
bo
ut
rota
tio
n a
xis
+ 2
an
gle
s t
o
sp
ec
ify a
xis
dir
ec
tio
n
•3
an
gu
lar
ve
loc
ity a
nd
acce
lera
tio
n c
om
po
ne
nts
•T
orq
ue
an
d r
ota
tio
na
l in
ert
ia a
lso
go
ve
rn m
oti
on
.
To
rqu
e m
eas
ure
s t
wis
tin
g a
bo
ut
an
ax
is:
de
pe
nd
s
on
fo
rce
& a
pp
lic
ati
on
po
int.
•R
ota
tio
na
l in
ert
ia I
(m
om
en
t o
f in
ert
ia)
mea
su
res
re
sp
on
se
to
to
rqu
es
(“ta
u”).
•R
ota
tio
na
l k
ine
tic
en
erg
y i
n a
dd
itio
n t
o t
ran
sla
tio
na
l K
E
•E
ne
rgy s
till
co
ns
erv
ed
in
is
ola
ted
sys
tem
s•
An
gu
lar
mo
me
ntu
m L
= I
ω ωωωa
lso
co
ns
erv
ed
wh
en
ne
t ex
tern
al
torq
ue
= 0
.
FINITE SIZE BODIES

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Angular Variables for Rotation
rad
ian
s)
(i
n
r
sle
ng
th
arc
θ θθθ= ===
≡ ≡≡≡rs
rad
≡ ≡≡≡θ θθθ
•Exam
ple:
r =
10 c
m,
θ θθθ=
100 r
ad
ian
s � ���
s =
1000 c
m =
10 m
.
Defi
nit
ion
:•
1 r
ad
ian
= a
ng
le t
hat
cu
ts o
ff a
rc len
gth
s =
rad
ius r
•
2π πππ
rad
ian
s =
fu
ll c
ircle
oo
o
.π
π
rad
ian
3
57
180
2
360
1= ===
= ==== ===
s
θ θθθ
rθ θθθ’
An
gle
s in
rad
ian
s sim
ple
ro
tati
on
fo
rmu
las

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Angular displacement and arc length (rigid body)
Angular displacementis the n
et
ch
an
ge
in
th
e a
ng
ula
r c
oo
rdin
ate
ra
dia
ns
)
in
(an
gle
sin
ita
lfi
na
l
θ θθθ
− −−−θ θθθ
≡ ≡≡≡θ θθθ
∆ ∆∆∆
Arc length
∆ ∆∆∆s m
easu
res d
ista
nce
co
vere
d b
y
a p
oin
t as i
t m
ove
s t
hro
ug
h ∆
θ∆
θ∆
θ∆
θ(c
on
sta
nt
r)
yR
efe
ren
ce lin
e r
ota
tin
g w
ith
bo
dy
x∆ ∆∆∆s = r ∆
θ∆
θ∆
θ∆
θ
θ θθθo
θ θθθf
rr
arc
)
cir
cu
lar
a
alo
ng
d
ista
nce
(a
rs
θ θθθ∆ ∆∆∆
≡ ≡≡≡∆ ∆∆∆
Ch
oo
se a
ro
tati
on
axis
•E
ach
po
int
of
the b
od
y m
oves a
rou
nd
th
e a
xis
in
a c
ircle
wit
h a
sp
ecif
ic r
ad
ius
•O
ne a
ng
ula
r co
ord
ina
te θ θθθ
sp
ecif
ies
po
sit
ion
of
the w
ho
le b
od
y a
bo
ut
this
rota
tio
n a
xis
.
•θ θθθ
is m
eas
ure
d C
CW
fro
m t
he x
-axis
, can
incre
ase p
as
t 2
π
π
π
π o
r can
be n
eg
ati
ve
.
x
y
rigid bod
yrotation
axis “o”
parallel to z-axis
Refe
renc
e
line
rotates
with bod
y
θ θθθ
An
gu
lar
dis
pla
cem
en
t:
•T
he n
et
an
gle
a r
igid
bo
dy r
ota
tes t
hro
ug
h d
uri
ng
so
me t
ime
in
terv
al…
..
•…
…a
lso
th
e a
ng
le s
wep
t o
ut
by a
re
fere
nce l
ine f
ixed
a b
od
y

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Rigid body rotation: angular & tangential velocity
Angular velocity
ω
ω
ω
ω
( (((“o
meg
a”):
•R
ate
of
ch
an
ge
of
the
an
gu
lar
dis
pla
ce
men
t
d
t
d t
tL
im
t
in
st
ave
θ θθθ
∆ ∆∆∆
θ θθθ∆ ∆∆∆
→ →→→∆ ∆∆∆
≡ ≡≡≡ω ωωω
∆ ∆∆∆
θ θθθ∆ ∆∆∆
≡ ≡≡≡ω ωωω
≡ ≡≡≡
0
•U
nit
s:
rad
ian
s/s
ec. P
os
itiv
e i
n C
CW
sen
se
•S
am
e ω ωωω
for
every
po
int
on
th
e b
od
y
•If
ω ωωωis
CO
NS
TA
NT
(un
ifo
rm c
ircu
lar
mo
tio
n)
tf
∆ ∆∆∆ω ωωω
= ===θ θθθ
− −−−θ θθθ
= ===θ θθθ
∆ ∆∆∆0
•F
req
uen
cy f
=
# o
f co
mp
lete
revo
luti
on
s/u
nit
tim
e
•f
= 1
/T T
= p
eri
od
(ti
me f
or
1 c
om
ple
te r
evo
luti
on
)
/2f
/T2
fπ πππ
ω ωωω= ===
π πππ= ===
π πππ= ===
ω ωωω2
Tangential velocityvT:
•U
nit
s:
dis
tan
ce
/ t
ime
•R
ate
at
wh
ich
a p
oin
t sw
eep
s o
ut
arc
len
gth
alo
ng
cir
cu
lar
pa
th
•P
rop
ort
ion
al
to r
, sa
me ω ωωω
rv
Tω ωωω
= ===
rs
θ θθθ∆ ∆∆∆
= ===∆ ∆∆∆
rdd
sco
nsta
nt)
(r
θ θθθ= ===
r
dt
dr
dt
ds
vT
ω ωωω= ===
θ θθθ= ===
≡ ≡≡≡
xvT
θ =
θ
=
θ =
θ
= ω
∆τ
ω∆
τω
∆τ
ω∆
τr
For
any
poi
nt,
r is
the p
erp
end
icul
ar
dis
tanc
e t
o th
e r
otati
on a
xis

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
�9.1
. T
he
peri
od
of
a r
ota
tin
g w
heel is
12.5
7 s
ec
on
ds.
T
he
rad
ius o
f th
e w
heel is
3 m
ete
rs.
It’s
an
gu
lar
sp
eed
is
clo
sest
to:
Angular velocity, period, and linear velocity
A.
79 rpm
B.
0.5 rad/s
C.
2.0 rad/s
D.
.08 rev/s
E.
6.28 rev/s
�9.2
. A
po
int
on
th
e r
im o
f th
e s
am
e w
heel h
as a
tan
gen
tia
l sp
eed
clo
ses
t to
:
A.
12.57 rev/s
B.
0.8 rev/s
C.
0.24 m/s
D.
1.5 m/s
E.
6.28 m/s
/T
2f
π πππ= ===
π πππ= ===
ω ωωω2
rv
Tω ωωω
= ===
r
sθ θθθ
∆ ∆∆∆≡ ≡≡≡
∆ ∆∆∆

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Centripetal, angular, tangential accelerations
Centripetal (radial) acceleration a
cor a
r:
•B
od
y r
ota
tes a
t ra
te ω ωωω
.
•C
en
trip
eta
l accele
rati
on
co
mp
on
en
t, p
oin
ts t
ow
ard
ro
tati
on
axis
•C
on
sta
nt
mag
nit
ud
e if
ω ωωωis
co
nsta
nt
(UC
M).
U
nit
s:
len
gth
/tim
e2
•C
han
gin
g if
ω ωωωn
ot
co
nsta
nt
(an
gu
lar
accele
rati
on
no
t zero
)
r)T
v (u
se
Tc
r
rv
aω ωωω
= ===ω ωωω
= ==== ===
2
2
So
far:
not
hin
g abou
t ang
ular
velo
city
chang
ing
ma
Fc
lc
en
trip
eta
= ===
xvT
ω ωωω
rac
Angular acceleration α
:α
:α
:α
:
•R
ate
of
ch
an
ge o
f th
e a
ng
ula
r velo
cit
y
t
Lim
tt
inst
ave
∆ ∆∆∆ω ωωω∆ ∆∆∆
≡ ≡≡≡α ααα
∆ ∆∆∆ω ωωω∆ ∆∆∆
≡ ≡≡≡α ααα
→ →→→∆ ∆∆∆
0
•U
nit
s:
rad
ian
s/s
ec/s
ec.
•C
CW
co
nsid
ere
d p
osit
ive
•for C
ON
ST
AN
T α
:α
:α
:α
:
t
f∆ ∆∆∆
α ααα= ===
ω ωωω− −−−
ω ωωω= ===
ω ωωω∆ ∆∆∆
0
t
dd
d
t
d2θ θθθ
= ===ω ωωω
≡ ≡≡≡α ααα
2
x
vT ω,α
ω,α
ω,α
ω,α
rac
aT
Tangential acceleration a
T:
•T
an
gen
tial accele
rati
on
co
mp
on
en
t
•P
rop
ort
ion
al to
an
gu
lar
accele
rati
on
a a
nd
als
o t
o
rad
ius r
•U
nit
s:
len
gth
/ t
ime 2
ra
Tα ααα
= ===
r
dt
dr
dt
dv
aT
Tα ααα
= ===ω ωωω
= ===≡ ≡≡≡

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
The whole set of angular and linear motion variables
x
r
θ,ω
,αθ
,ω,α
θ,ω
,αθ
,ω,α
vT
ac
aT
a to
tal
Angular variables ∆
θ∆
θ∆
θ∆
θ,
ω,
α,
ω,
α,
ω,
α,
ω,
α:
•apply to the whole rotating body
Linear variables r, s, vT, aT, ac:
•apply to a specific point on a rotating
body & are signed magnitudes
•values all proportional to r –distance
from the rotation axis
r
ac
2ω ωωω
= ===
ra
Tα ααα
= ===
Total linear acceleration of a point (rotation):
•vector sum of radial and tangential
components (normal to each other)
aa
aT
cto
tal
22
+ +++= ===
Implications:
•IF
ω ωωωis constant, then α ααα=0, aT=0. But ac= a
ris not 0
•IF
ω ωωωis not constant, then α αααand aTare not 0, a
cand VTvary with time
•IF α αααis constant, then aTis constant for a particular point, different for different r
∆ω
∆ω
∆ω
∆ωis proportional to ∆ ∆∆∆t(angular kinematics)
vTis not constant (so this is not UCM) }
2
2
dt
d
dt
d
dt
d
θ θθθ= ===
ω ωωω≡ ≡≡≡
α αααθ θθθ
≡ ≡≡≡ω ωωω
θ θθθ∆ ∆∆∆
ωr
vr∆
θ θθθs
T= ===
= ===

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Rotational variables are vectors, having direction
•T
he a
ng
ula
r d
isp
lacem
en
t, s
pe
ed
, an
d a
ccele
rati
on
•(
θ,
θ,
θ,
θ,
ω ωωω, , , ,
α ααα)
•are
th
e m
ag
nit
ud
es o
f ro
tati
on
al
dis
pla
ce
men
t,
ve
locit
y,
an
d
accele
rati
on
ve
cto
rs
•T
he d
irecti
on
s a
re g
iven
by t
he
rig
ht-
han
d r
ule
Poin
t th
umb a
long
+ a
xis
fing
ers
cur
l CCW
(po
siti
ve)
sens
e

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Linear and Angular Kinematics Equations
(Same mathematical forms)
dt
dv
a= ===
dt
dx
v= ===
Linear motion
•Constant acceleration a
x(t
), v
(t),
a(t
)
Angular motion
•Constant angular acceleration α ααα
Variables
Definitions
Kinematic
Equations
at
v)t(
vf
+ +++= ===
0
2
21
00
at
tv
x)t(
xf
+ ++++ +++
= ===
]x
x[a
v)t(
vf
f0
2 0
22
− −−−+ +++
= ===
Check by differentiating:
at
vat
)(
vd
t
dx
v+ +++
= ===+ +++
= ==== ===
021
02
Both sets of kinematic equations follow from the definitions of
velocity and acceleration by integrating
tv
vx
)t(x
)f
o(
f+ +++
+ +++= ===
21
0
θ(
θ(
θ(
θ(t
),
),
),
), ω
(ω
(ω
(ω
(t),
),
),
),
α(
α(
α(
α(t
) )))
dt
dθ θθθ
= ===ω ωωω
dt
dω ωωω
= ===α ααα
t)t(
fα ααα
+ +++ω ωωω
= ===ω ωωω
0
2
21
00
tt
)t(f
α ααα+ +++
ω ωωω+ +++
θ θθθ= ===
θ θθθ
][
)t(f
f0
2 0
22
θ θθθ− −−−
θ θθθα ααα
+ +++ω ωωω
= ===ω ωωω
at
t)
(d
t
d+ +++
ω ωωω= ===
α ααα+ +++
ω ωωω= ===
θ θθθ= ===
ω ωωω0
21
02
t)t(
)f
o(
fω ωωω
+ ++++ +++
θ θθθ= ===
θ θθθω ωωω
21
0

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Hints for solving rotational kinematics problems
•The r
otati
onal ki
nem
ati
cs e
quati
ons
have
the s
am
e m
ath
em
ati
cal
form
as
the lin
ear
kine
mati
cs e
quati
ons
but
wit
h d
iffe
rent
sym
bol
s.
•Tech
niqu
es
are
sim
ilar
to t
hos
e u
sed in
line
ar
mot
ion
prob
lem
s•
Con
stant
(or
zero
) ang
ular
acc
ele
rati
on.
•Velo
citi
es
and
acc
ele
rati
ons
(lin
ear
and
ang
ular)
are
resp
ect
ively
firs
t and
seco
nd d
eri
vati
ves
of d
ispl
ace
ment
s.
Som
e d
iffe
renc
es
for
Rot
ati
onal Kin
em
ati
cs:
•A r
otati
on a
xis
is
invo
lved.
Onc
e s
et,
axis
choi
ce m
ust
rem
ain
the s
am
e f
or t
he p
roble
m•
In
som
e p
roble
ms
there
may b
e a
n ob
viou
s, n
atu
ral axis
.•
The o
bje
ct k
eeps
retu
rnin
g to
its
ori
gina
l or
ient
ati
on (
if t
here
is n
o tr
ans
lati
on).
•
Dis
place
ment
can
be s
peci
fied a
s th
e n
umber
of r
evo
luti
ons
made b
y t
he b
ody,
or b
y t
he t
otal ang
le.

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Angular kinematics example:
A t
urn
tab
le i
nit
iall
y a
t re
st
reach
es a
sp
ee
d o
f 33 1
/3 r
pm
in
15
seco
nd
s.
D
ete
rmin
e t
he a
vera
ge a
ng
ula
r accele
rati
on
.
t
t0
fave
∆ ∆∆∆
ω ωωω− −−−
ω ωωω= ===
∆ ∆∆∆ω ωωω∆ ∆∆∆
≡ ≡≡≡α ααα
Use t
he d
efi
nit
ion
or
a k
inem
ati
c f
orm
ula
t
0f
ave
∆ ∆∆∆
ω ωωω− −−−
ω ωωω= ===
α ααα
ave
an
dco
nsta
nt
is
f
t)t(
α ααα= ===
α ααα∆ ∆∆∆
α ααα+ +++
ω ωωω= ===
ω ωωω0
Eit
her
wa
y:
Un
its:
rad
/sec
ra
d/s
re
v/m
in
3
.49
/60
2 x
10
0/3
1/3
3
3= ===
π πππ= ===
2ra
d/s
ec
ave
0
.23
3
.
= ===− −−−
= ===α ααα
15
04
93
Su
bsti
tute
:

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
at
t =
0:
Angular kinematics example:
A g
rin
dsto
ne is
ro
tati
ng
wit
h c
on
sta
nt
an
gu
lar
accele
rati
on
ab
ou
t a f
ixed
axis
in
sp
ace.
Ini
tial co
ndit
ions
Use
kin
em
ati
cs f
orm
ula:
t
t)t(
f2
21
00
α ααα+ +++
ω ωωω+ +++
θ θθθ= ===
θ θθθ
Po
sit
ive
dir
ec
tio
ns
:
rig
ht
ha
nd
ru
le
0
rad
/s
4.6
-
rad
/s
0.3
5
0
2= ===
θ θθθ= ===
ω ωωω= ===
α ααα0
a) When is the displacement
∆ ∆∆∆θ θθθ= 5 rev.
2
21f
t 0.3
5
t
4.6
-
rad
10
rev
5.0
)t(
+ +++= ===
π πππ= ===
= ===θ θθθ
− −−−θ θθθ
0
0
10
t
4.6
t
.2
= ===π πππ
− −−−− −−−
175
0Sol
ve q
uadra
tic
equ
ati
on:
ne
ga
tive
)
isro
ot
(se
co
nd
s
ec
3
2
t
= ===
init
ially r
otati
ng in
nega
tive
sens
e b
ut w
ith p
osit
ive a
ngul
ar
acc
ele
rati
on
b) When is ∆ ∆∆∆
θ θθθ= 0 again?
Set:
t
t2
21
00
α ααα+ +++
ω ωωω+ +++
= ===
Two
root
s are
:{
co
nd
itio
n)
in
itia
l
the
(ju
st
0
t
= ===
s 26.3
2-
t
0 t
2 0
= ===α αααω ωωω
= ===⇒ ⇒⇒⇒
= ===α ααα
= ===ω ωωω
0
Reve
rses direction,
rotates back and
th
roug
h origina
l po
sition

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
�9.3
. A
t t
= 0
, a
wh
eel ro
tati
ng
ab
ou
t a f
ixed
ax
is a
t a
co
ns
tan
ta
ng
ula
r accele
rati
on
ha
s a
n a
ng
ula
r velo
cit
y o
f 2
.0 r
ad
/s. T
wo
seco
nd
s la
ter
it h
as
tu
rne
d t
hro
ug
h 5
.0 c
om
ple
te r
evo
luti
on
s.
Fin
d t
he a
ng
ula
r acc
ele
rati
on
of
this
wh
eel?
Wheel rotating and accelerating
A.
17 rad/s2
B.
14 rad/s2
C.
20 rad/s2
D.
23 rad/s2
E.
13 rad/s2
t)t(
fα ααα
+ +++ω ωωω
= ===ω ωωω
0
2
21
00
tt
)t(f
α ααα+ +++
ω ωωω+ +++
θ θθθ= ===
θ θθθ
][
)t(f
f0
2 0
22
θ θθθ− −−−
θ θθθα ααα
+ +++ω ωωω
= ===ω ωωω

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Mom
ent
of
Ine
rtia
I
measu
res B
OT
H m
ass a
nd
its
dis
trib
uti
on
dep
en
ds o
n t
he c
ho
ice o
f ro
tati
on
axis
r pis
perp
en
dic
ula
r d
ista
nce f
rom
mass p
oin
t to
axis
masses o
naxis
have r
p=
0, n
o c
on
trib
uti
on
to
I
m
as
se
s
po
int
fo
r2
i,i
P
rm
I ∑ ∑∑∑
⊥ ⊥⊥⊥= ===
sam
e m
ass
small I
larg
er
I
“M
om
en
t o
f in
ert
ia”
pla
ys t
he r
ole
of
mass
“T
orq
ue p
lays t
he r
ole
of
forc
e
Rot
ati
onal 2
ndLaw:
I
ne
tα ααα
= ===τ τττ
ma
F net= ===
Ro
tati
on
al w
ork
:
Po
wer
used
wh
en
d
oin
g r
ota
tio
nal w
ork
:
θ θθθτ τττ
= ===d
dW
rot
Fd
xd
W= ===
Pd
t
dW
rot
rot
τω τωτωτω= ===
≡ ≡≡≡v
FP
o
dt
dW
= ===≡ ≡≡≡
Tor
que τ τττ
TW
IST
-m
easu
res a
pp
lied
fo
rce A
ND
wh
ere
it
acts
MO
ME
NT
AR
M(l
ever
arm
) r p
= p
erp
en
dic
ula
r d
ista
nce
fro
m a
xis
to
lin
e o
f acti
on
of
forc
e
Fr
)sin
(rF
arm
le
ver
x
forc
e
× ×××= ===
θ θθθ= ===
= ===τ τττ
F
r p
r
θF
r pr
θ
Key Angular Dynamics Concepts
bo
die
s
co
nti
nu
ou
s
for
P
dm
xd
mr
I
∫ ∫∫∫∫ ∫∫∫
= ===≡ ≡≡≡
⊥ ⊥⊥⊥
22
the
ore
m
ax
is
pa
rall
el
c
mP
M
h
I
I2
+ +++= ===

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Rotational Kinetic Energy
∆m
i
ω
•T
ota
l K
E c
an
ha
ve t
wo
part
s:
Kto
t=
Kro
t+
Kcm
•C
on
sid
er
wh
eel ro
tati
ng
in
x-y
pla
ne.
K
cm
= 0
•C
om
po
sed
of
mass c
hu
nks ∆ ∆∆∆
mi
mo
vin
g i
n c
ircle
s•
All
ch
un
ks h
ave s
am
e a
ng
ula
r sp
eed
ω ωωω
axis
ro
tati
on
to
m
fro
m
dis
tan
ce
la
rp
erp
en
dic
ui
i
r ∆ ∆∆∆
⊥ ⊥⊥⊥= ===
• •••
v
mK
ET
i i
rot
h
as
ch
un
k
mass
E
ach
2
21∆ ∆∆∆
= ===• •••
im
o
f
velo
cit
y
an
gen
tial
ti
Ti
r
v ∆ ∆∆∆
⊥ ⊥⊥⊥= ===
ω ωωω= ===
• •••
[ [[[] ]]]
2i
i2
i i
rot
:to
tal
get
to
ch
un
ks
th
e
all
fo
r
en
erg
ies
d
dA
r
m
2
rm
KE
ω ωωω∆ ∆∆∆
= ===ω ωωω
∆ ∆∆∆= ===
∑ ∑∑∑∑ ∑∑∑
⊥ ⊥⊥⊥
• •••
22
1
2
∆ ∆∆∆m
i
ω
ir ⊥ ⊥⊥⊥r
Ti
v
y
xz
∑ ∑∑∑⊥ ⊥⊥⊥
∆ ∆∆∆≡ ≡≡≡
2
i ir
m I
Mo
men
t o
f In
ert
iam
easu
res r
esis
tan
ce
to t
orq
ue (
twis
t)2
1ω ωωω
= ===I
K
E2
rot
Ro
tati
on
al
KE
in
term
s o
f I
-re
ca
ll 1
/2m
v2
for
lin
ear
mo
tio
n
Ι ΙΙΙd
ep
en
ds o
n w
here
yo
u p
ick t
he a
xis
:
vs vs
Moment of Inertia -Definition

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
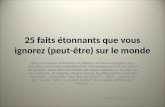
Example: Find moments of inertia for a crossed dumbbell
•Fou
r id
ent
ical balls
as
show
n:
m =
2 k
g•C
onne
cted b
y m
ass
less
rods:
le
ng
th d
= 1
m.
m m
mm
d d
dd
AC
Bd 2
A)
Ch
oo
se r
ota
tio
n a
xis
perp
en
dic
ula
r to
fig
ure
th
rou
gh
po
int
“A
”
m
as
se
sp
oin
t
for
2 i,
i
rm
I ∑ ∑∑∑
⊥ ⊥⊥⊥= ===
22
2
2 i,
iA
m kg
1
2
4
4m
d
r
mI
8= ===
× ×××× ×××
= ==== ===
= ===∑ ∑∑∑
⊥ ⊥⊥⊥
B)
No
w c
ho
ose a
xis
perp
en
dic
ula
r to
fig
ure
th
rou
gh
po
int
“B
”
22
22
2
Bm
kg
6
8m
d
d
)
2m
(
d
)
2m
(
m(2
d)
I
1= ===
= ===+ +++
+ +++= ===
C)
Let
rota
tio
n a
xis
pass t
hro
ug
h p
oin
ts “
B”
an
d “
C”
22
22
Cm
kg
2m
d
m
d
m
d
m(0
)
m(0
)
I 4
= ==== ===
+ ++++ +++
+ +++= ===
Rot
ati
onal in
ert
ia I
depe
nds
on a
xis
chos
en

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Parallel Axis Theorem
para
llel
axis
th
eo
rem
descri
be
s v
ari
ati
on
, b
as
ed
on
Ic
m
ap
pli
es t
o p
oin
t m
asses a
nd
to
co
nti
nu
ou
s b
od
ies
Th
e m
om
en
t o
f in
ert
ia I
d
ep
en
ds w
here
th
e
rota
tio
n a
xis
P i
s
M = the total mass of the body
CM = mass center
h = perpendicular distance from CM to axis through P
2M
h
I
Icm
P+ +++
= ===
mom
ent
of
inert
ia a
bou
t axis
thro
ugh p
oint
P
rota
tion
al in
ert
ia o
f to
tal m
ass
M if
at
the C
M p
oint
, ta
ken
abou
t axis
thro
ugh P
mom
ent
of
inert
ia a
bou
t axis
thro
ugh C
M p
ara
llel
to a
xis
thro
ugh P
para
llel axes
thro
ugh
P and
CM
“rot
ati
onal in
ert
ia”
and
“m
oment
of
inert
ia”
are
syno
nym
s
Ch
oo
sin
g t
he
ax
isT
hro
ug
h t
he
CM
min
imiz
es
th
e m
om
en
t o
f in
ert
ia (
h =
0)
CM
P
h

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
An example showing that the parallel axis theorem works
•Rot
ati
on a
xis
perp
end
icul
ar
to p
lane
of
figu
re
•M
ass
es
on t
he c
orne
rs o
f a r
ect
ang
le,
sides
a &
b
•Abou
t an
axis
thro
ugh t
he C
M: [ [[[
] ]]]2
22
22
44
44
ba
m
b
a
mh
m I C
M+ +++
= ===
+ +++
= ===≡ ≡≡≡
•Abou
t an
axis
“P”
thro
ugh a
cor
ner:
[ [[[] ]]]
[ [[[] ]]]
22
22
0b
a
2m
ba
m
b m
ma
I 2
2P
+ +++= ===
+ ++++ +++
+ ++++ +++
= ===
h2= (a/2
)2+ (b/2
)2
X cm
b
a
h
h
mm m
mP
2
i,i
r
mI ∑ ∑∑∑
⊥ ⊥⊥⊥= ===
•U
sing
the P
ara
llel Axis
Theor
em
dir
ect
ly f
or t
he s
am
e c
orne
r axis
:
[ [[[] ]]]
[ [[[] ]]]
22
22
2
44
4b
a
2m
ba
m
ba
m
hM
I
I 2
2to
tcm
P+ +++
= ===
+ +++
+ ++++ +++
= ===+ +++
= ===

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
�9.4
T
he f
igu
re s
ho
ws f
ou
r p
art
icle
s j
oin
ed
to
ge
ther
by m
assle
ss, ri
gid
ro
ds.
A
ssu
me a
= b
an
d M
> m
.
Ab
ou
t w
hic
h o
f th
e f
ollo
win
g a
xes d
oes
the
sys
tem
ha
ve t
he s
ma
lles
t m
om
en
t o
f in
ert
ia?
Moment of inertia for another crossed dumbbell
A.
the x axis
B.
the y axis
C.
the z axis
D.
the moment of inertia is the same for
the first two choices above
E.
the moment of inertia is the same for
all of the first three choices above
2
i,i
r
mI ∑ ∑∑∑
⊥ ⊥⊥⊥= ===
�9.5
. A
bo
ut
wh
ich
of
the
axes d
oes t
he
sys
tem
ha
ve t
he
larg
est
mo
men
t o
f in
ert
ia?

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Moment of Inertia for Continuous Mass Distributions
∫ ∫∫∫∑ ∑∑∑
→ →→→∞ ∞∞∞
→ →→→→ →→→
∆ ∆∆∆
,
n
,d
m
m
i
dm
rd
m
s
i
i i
22
⊥ ⊥⊥⊥= ===
→ →→→∆ ∆∆∆
= ===∆ ∆∆∆
II
Con
tinu
um lim
it:
let
chun
k si
ze � ���
0
∑ ∑∑∑∑ ∑∑∑
= ==== ===
∆ ∆∆∆= ===
∆ ∆∆∆≡ ≡≡≡
n,i
i
n,i
ii
m
s
11
2I
I
∆ ∆∆∆m
is
i
P
The p
ara
llel axis
theor
em
hol
ds,
as
befo
re
2M
h
I
Ic
mP
+ +++= ===
mom
ent of inertia abou
t ax
is throug
h point P
mom
ent of inertia abou
t mass ce
nter
total
mass
perpend
icular
distanc
e
betw
een ax
es
The int
egr
al ca
n of
ten
be e
valu
ate
d,
esp
eci
ally f
or c
onst
ant
dens
ity.
V
d )r(
rd
mr
I P
32
2
ρ ρρρ= ===
≡ ≡≡≡∫ ∫∫∫
∫ ∫∫∫⊥ ⊥⊥⊥
⊥ ⊥⊥⊥
dens
ity
volu
me
d
m r
M
1
r
vo
lto
tc
m∫ ∫∫∫
≡ ≡≡≡r
v
Com
pare
wit
h M
ass
Cent
er

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Exam
ple:
Fin
d t
he m
oment
of
inert
ia o
f a u
nifo
rm t
hin
…ri
gid r
od a
bou
t an
axis
thro
ugh its
cent
er
•The s
haded a
rea h
as
a m
ass
:
dm
= λ λλλ
dx
λ λλλ=
mass/u
nit
len
gth
= M
/Ldm
xd
mr
I P
∫ ∫∫∫∫ ∫∫∫
= ===≡ ≡≡≡
⊥ ⊥⊥⊥
22
tota
l m
ass M
-L
/ 2
L /
2
y
•Then
the m
oment
of
inert
ia
abou
t y-axis
is:
( ((() )))
L
L
31 LM
/L
/L
31 LM
L/2
L/2
-
L/2
L/2
-y
x
d
xx
dm
x
I
− −−−− −−−
+ +++ − −−−
+ ++++ +++
= ==== ===
λ λλλ= ===
≡ ≡≡≡∫ ∫∫∫
∫ ∫∫∫8
8
2 2
32
23
3
2M
L
I
121
y
= ===∴ ∴∴∴

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
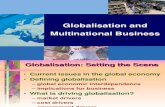
Moments of Inertia of Various Rigid Objects

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Exam
ple:
Mom
ent
of
inert
ia f
or a
rod
ro
tati
ng a
roun
d o
ne e
nd
Use Parallel Axis Theorem
cm
2M
h
I
Ic
mP
+ +++= ===
M
LL
M
ML
I
121
P2
312
2
2= ===
+ +++= ===
M
L
I
121
cm
2= ===
There
fore
,
The m
oment
of
inert
ia o
f th
e r
od a
bou
t it
s ce
nter
is
h =
½L

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
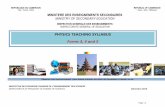
Application of the parallel axis theorem to a wheel and a sphere
Pr
cm
�Cir
cula
r pl
ate
or
cylind
er:
Fin
d I
abou
t axis
thro
ugh P
Fro
m T
ab
le:
M
r
I21
cm
2= ===
“cm
”axis
is n
orm
al
to p
lan
e t
hro
ug
h c
en
ter
of
wh
eel
r
h
Mh
I
I2
cm
P= ===
+ +++= ===
“P
”axis
is n
orm
al
to p
lan
e t
hro
ug
h e
dg
e o
f w
heel
2P
Mr
Mr
21
I
+ +++= ===
2
Mr
23
I
P
2= ===
∴ ∴∴∴
�Sol
id s
phere
: Fin
d I
abou
t a t
ang
ent
lin
e t
hro
ugh P
Pr
cm
Fro
m T
ab
le:
M
r
I52
cm
2= ===
“cm
”axis
is i
n p
lan
e c
en
ter
of
sp
herer
h
Mh
I
I2
cm
P= ===
+ +++= ===
“P
”axis
is i
n t
hep
lan
ea
nd
tan
gen
t to
ed
ge
of
sp
here
2
55
52P
Mr
Mr
I+ +++
= ===2
M
r57
I
P2
= ===∴ ∴∴∴