PCB du bras Merlin 225testpacko.businesscatalyst.com/assets/006849---cartes-du...PCB du bras Merlin...
25
PCB du bras Merlin 225 006849 Revision 0.1 Structure avec la mise à jour CP-10 / version 1.75. Connexions changées pour le modèle Merlin 225 avec bloc Festo MPA.
Transcript of PCB du bras Merlin 225testpacko.businesscatalyst.com/assets/006849---cartes-du...PCB du bras Merlin...

PCB du bras
Merlin 225 006849 Revision 0.1 Structure avec la mise à jour CP-10 / version 1.75. Connexions changées pour le modèle Merlin 225 avec bloc Festo MPA.

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
Table des matières...
PCB du bras – Merlin 225
Table des matières
.. 2
Informations importantes – A lire en priorité ................................................. 3
Icônes... ........................................................................................................ 3
1. Armoire de contrôle du bras... ........................................................... 4 1.1 Alimentation électrique dans l’armoire de contrôle du bras ... ............................ ..5
1.2 PCB CP-10 (Pièce détachée 094770)................................................................ ...7
1.3 PCB MELK 3 (Pièce détachée 097771) ............................................................ ...8
1.4 PCB ROBOT 3 (Pièce détachée 094772) ......................................................... ...9
1.5 PCB POS 5 (Pièce détachée 094772)... ............................................................ .12
1.6 PCB CANLIA (Pièce détachée 094986) ............................................................ .14 1.6.1 ADRESSE MEMOIRE J1... ....................................................................................... ... 14 1.6.2 JT1 ... ........................................................................................................................ ... 15 1.6.3 JP 400 (Pas pour un laser statique)... ....................................................................... ... 15 1.6.4 JP401 (Pas pour un laser statique)... .......................................................................... . 15
1.7 IOSD-15 ... ......................................................................................................... ..16
1.8 SD-15 (Pièce détachée 094623) ... .................................................................. ...17
1.9 KBDP-13 (Pièce détachée 094779) ... ............................................................... .18
1.10 Menu de contrôle du bras..................................................................................... .19
1.11 Nettoyage du laser... ............................................................................................. .20
1.12 Réglages.............................................................................................................. ..20
1.13 Bras du robot ... .................................................................................................... .22
1.14 Test du bras.......................................................................................................... .23
1.15 Menu technicien... ................................................................................................. .25 Copyright © 2007, FULLWOOD Limited se réserve le droit de modifier le contenu de ce document si nécessaire, et ce, sans avertissement. FULLWOOD Limited a pris toutes les précautions afin d’éviter les erreurs et omissions dans le manuel et le matériel, mais ne saurait accepter aucune responsabilité ou engagement concernant tout dommage causé par l’utilisation de ce manuel ou du matériel FULLWOOD, que ce dommage soit direct ou indirect. Si vous découvrez une quelconque erreur, veuillez en informer FULLWOOD ou l’un de ses agents qui effectuera les corrections nécessaires lors de la prochaine version.
006849 Page 2 sur 25
Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
Informations importantes – A lire en priorité √ Ce document, ainsi que les consignes d’utilisation appropriées, sont à lire attentivement
avant l'installation et la mise en route de l'équipement.
√ L'équipement doit être utilisé uniquement pour les applications décrites.
√ L’installation du matériel doit être réalisée seulement par des techniciens qualifiés et agréés.
√ Une bonne manipulation du matériel est la base d’un fonctionnement correct.
√ Toujours débrancher et isoler le(s) câble(s) électrique(s) avant d’enlever le(s) capot(s) ou éléments du matériel.
√ Ne jamais laver l’équipement électronique à grande eau ou à haute pression.
√ Il relève de la responsabilité de l’utilisateur de prendre soin de son bétail et de vérifier la performance de l’équipement. Si, pour une raison quelconque, le système n’est pas opérationnel ou si certains animaux refusent d’utiliser le système, il revient à l'utilisateur d’alimenter et traire le bétail d’une autre façon.
√ Pour éviter des blessures sur les animaux ou des dommages sur l'équipement, vérifier qu’aucun tube ou autre ne dépasse dans la salle de traite sur lesquels les transpondeurs autour du cou ou les sangles aux pattes ne puissent s’accrocher.
√ La calibration des compteurs à lait/boîtiers de contrôle et des distributeurs d’aliments est primordiale pour obtenir des résultats de traite et d’alimentation corrects. Si la calibration est fausse, ou si de mauvaises valeurs ont été programmées, les résultats de traite et de distribution d’aliments s'en trouveront affectés, jusqu’à ce que la calibration ait été corrigée.
√ La garantie constructeur ne couvre pas les dommages directs ou causés par une mauvaise installation, une utilisation incorrecte, un entretien ou lavage inappropriés, des saisies logiciels ou des réglages matériels erronés.
√ De mauvaises manipulations de traite ou une mauvaise gestion du système peuvent sérieusement affecter les animaux. Par conséquent, il est indispensable de vérifier soigneusement toutes les entrées et sorties du système.
Icônes
Des icônes sont utilisées dans ce manuel afin d’attirer l’attention du lecteur sur des informations spécifiques. Ces icônes se présentent comme suit :
006849 Page 3 sur 25
Le non-respect des instructions peut entraîner de graves blessures aux techniciens, utilisateurs, employés ou au bétail.
Indique que des précautions particulières doivent être prises pour éviter des dommages sur le matériel.
Fournit des informations importantes pour éviter d’éventuels problèmes.
Donne des conseils ou suggestions pour faciliter ou éclaircir les procédures.

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1. Armoire de contrôle du bras Partie 1.8
Partie 1.1 Partie 1.7
Partie 1.6
Partie 1.2 Partie 1.3 Partie 1.4 Partie 1.5 006849 Page 4 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.1 Alimentation électrique dans l’armoire du bras
Les valeurs de la tension électrique sont enregistrées quand le robot est en position “Pause” en utilisant un multimètre entre les 2 points indiqués dans chaque tableau.
Le connecteur d’arrivée électrique (input) à l’unité d’alimentation électrique est situé sur le côté gauche de l’unité électrique à l’intérieur de l’armoire de contrôle du bras.
094786 Alimentation électrique dans l’armoire du bras - INPUT (du transformateur situé au dessus de l’armoire technique)
18v1~ / 0v1~ 18 VAC 18v2~ / 0v2~ 18 VAC
Mlk_v1~ / Mlk_0~ 15 VAC Mlk_v2~ / Mlk_0~ 15 VAC
24vs / 0v 24 VDC v1~ / 0v~ 18 VAC V2~ / 0v~ 18 VAC
Description de Nom du câble Fil Nombre Tran sformateur
la prise (Unité électrique du bras) terminal 18v1~ Arm power unit Noir 1 70 Toriodal 18v2~ Arm power unit Noir 2 72 Toriodal 0v1~ Arm power unit Noir 3 71 Toriodal 0v2~ Arm power unit Noir 4 73 Toriodal
MLK_0v~ Arm power unit Noir 5 76 Toriodal MLK_v1~ Arm power unit Noir 6 75 Toriodal MLK_v2~ Arm power unit Noir 7 74 Toriodal
0v Arm power unit Noir 8 82 Quint 24vs Arm power unit Noir 9 81 Quint V1~ Arm power unit Noir 10 77 Toriodal 0v~ Arm power unit Noir 11 78 Toriodal V2~ Arm power unit Noir 12 79 Toriodal
006849 Page 5 sur 25
Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
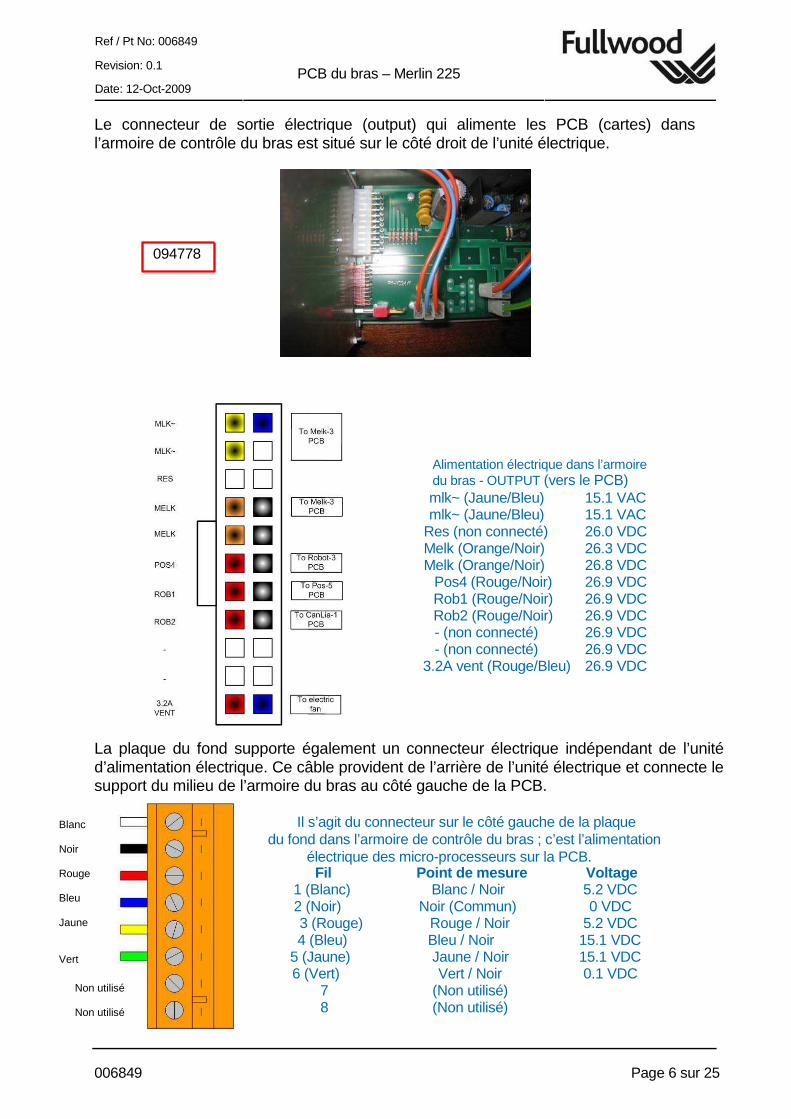
Le connecteur de sortie électrique (output) qui alimente les PCB (cartes) dans l’armoire de contrôle du bras est situé sur le côté droit de l’unité électrique.
094778 Alimentation électrique dans l’armoire du bras - OUTPUT (vers le PCB) mlk~ (Jaune/Bleu) 15.1 VAC mlk~ (Jaune/Bleu) 15.1 VAC
Res (non connecté) 26.0 VDC Melk (Orange/Noir) 26.3 VDC Melk (Orange/Noir) 26.8 VDC
Pos4 (Rouge/Noir) 26.9 VDC Rob1 (Rouge/Noir) 26.9 VDC Rob2 (Rouge/Noir) 26.9 VDC - (non connecté) 26.9 VDC - (non connecté) 26.9 VDC
3.2A vent (Rouge/Bleu) 26.9 VDC
La plaque du fond supporte également un connecteur électrique indépendant de l’unité d’alimentation électrique. Ce câble provident de l’arrière de l’unité électrique et connecte le support du milieu de l’armoire du bras au côté gauche de la PCB.
Il s’agit du connecteur sur le côté gauche de la plaque
du fond dans l’armoire de contrôle du bras ; c’est l’alimentation électrique des micro-processeurs sur la PCB.
Fil Point de mesure Voltage 1 (Blanc) Blanc / Noir 5.2 VDC 2 (Noir) Noir (Commun) 0 VDC 3 (Rouge) Rouge / Noir 5.2 VDC 4 (Bleu) Bleu / Noir 15.1 VDC
5 (Jaune) Jaune / Noir 15.1 VDC 6 (Vert) Vert / Noir 0.1 VDC
7 (Non utilisé) 8 (Non utilisé)
006849 Page 6 sur 25
Blanc Noir Rouge Bleu Jaune Vert Non utilisé
Non utilisé
Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
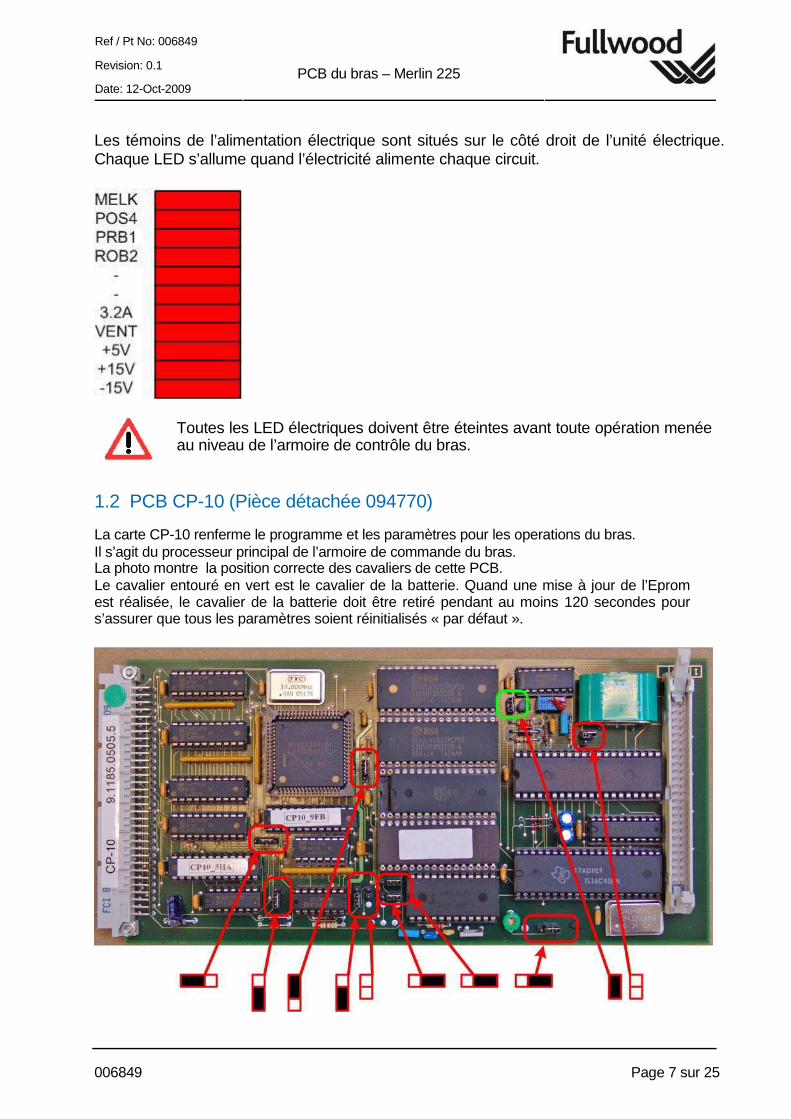
Les témoins de l’alimentation électrique sont situés sur le côté droit de l’unité électrique. Chaque LED s’allume quand l’électricité alimente chaque circuit.
Toutes les LED électriques doivent être éteintes avant toute opération menée au niveau de l’armoire de contrôle du bras.
1.2 PCB CP-10 (Pièce détachée 094770)
La carte CP-10 renferme le programme et les paramètres pour les operations du bras. Il s’agit du processeur principal de l’armoire de commande du bras. La photo montre la position correcte des cavaliers de cette PCB. Le cavalier entouré en vert est le cavalier de la batterie. Quand une mise à jour de l’Eprom est réalisée, le cavalier de la batterie doit être retiré pendant au moins 120 secondes pour s’assurer que tous les paramètres soient réinitialisés « par défaut ».
006849 Page 7 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.3 PCB MELK 3 (Pièce détachée 097771)
La carte MELK-3 est connectée aux senseurs de flux de lait au niveau du bras du Merlin. Chaque senseur est calibré individuellement en utilisant les potentiomètres comme indiqué sur la PCB. Si un senseur a été activé par le passage d’un liquide, ou l’utilisation des potentiomètres de calibration, la LED correspondante s’allument. La position des cavaliers montrée est correcte pour assurer le bon fonctionnement de la PCB.
Connecteur N° du fil Couleur du fil Fonction PL-9 1 Rouge Senseur Arrière Gauche (LR) PL-9 2 Bleu Senseur Arrière Gauche (LR) PL-9 3 Violet Senseur Arrière Droit (RR) PL-9 4 Noir Senseur Arrière Droit (RR) PL-9 5 PL-9 6 PL-9 7 Marron Senseur Avant Droit (RF) PL-9 8 Blanc Senseur Avant Droit (RF) PL-9 9 Jaune Senseur Avant Gauche (LF) PL-9 10 Vert Senseur Avant Gauche (LF)
006849 Page 8 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.4 PCB ROBOT 3 (Pièce détachée 094772)
La carte Robot-3 est un dispositif d’entrée/sortie (Input / Output) utilisé pour commander les solénoïdes Festo d’air comprimé sur la tête de bras et le lavage du laser, et aussi pour commander le vide et le fonctionnement des senseurs sur le bras.
Le PCB Robot-3 et le câblage du boîtier de connexion.
006849 Page 9 sur 25
Vue du dessus du boîtier de connexion
Arrière Gauche
Avant Droit
Avant Gauche
Arrière Droit
« Entrer »
Angle

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
006849
PCB du bras – Merlin 225
Page 10 sur 25
VERS UNITE VALVE MPA
Noir
Noir
VERS PRISE ELECTRICITE
VERS UNITE VALVE MPA
VERS (JB1) BOITIER DE CONNEXION DU
BRAS
N° 1 : DESINFECTANT (Noir)
CONNECTEUR 12 VOIES
CONNECTEUR 20 VOIES
EAU LASER ( NOIR) NOIR
BLANC / BLEU ROSE / MARRON
DESINFECTANT ( NOIR)
BLANC / VERT BLANC / JAUNE BLANC / GRIS BLANC / ROSE
ROUGE
EAU LASER ( NOIR)
MARRON / BLEU
NON CONNECTE NON CONNECTE JAUNE GRIS ROSE BLEU NON CONNECTE VIOLET NON CONNECTE NON CONNECTE NON CONNECTE JAUNE / MARRON BLANC / JAUNE MARRON / VERT BLANC / VERT MARRON VERT BLEU NON CONNECTE NON CONNECTE

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
Départ Arrivée TB1-1 Valve MPA TB 1-2 Valve
Burkert 1-1 TB1-4 TB1-3 TB1-4 PL10-1
PL10-2 Valve Burkert 2-2
PL10-3 Valve MPA PL10-4 Valve MPA PL10-5 Valve
Burkert 1-2 PL10-6 Valve MPA PL10-7 Valve MPA PL10-8 Valve MPA PL10-9 Valve MPA PL10-10 Valve MPA PL10-11 Valve
Burkert 2-1 PL10-12 Valve MPA PL11-1 PL11-2 PL11-3 valve MPA PL11-4 valve MPA PL11-5 valve MPA PL11-6 valve MPA PL11-8 valve MPA
PL11-12 Bras P6-4 PL11-13 Bras P5-4 PL11-14 Bras P4-4 PL11-15 Bras P3-4 PL11-16 Bras P1/6-1 PL11-17 Bras P2-4 PL11-18 Bras P1/6-3
Câblage dans le boîtier:
PCB du bras – Merlin 225
Transistor Couleur de fil Noir Noir1
Noir Noir
Noir 2
15 Blanc/Bleu 16 Rose/Marron 2 Noir 2
3 Blanc/Vert 4 Blanc/Jaune 7 Blanc/Gris 8 Blanc/Rose 6 Rouge 5 Noir 1
12 Jaune 9 Gris 10 Rose 11 Bleu 14 Violet
Jaune/Marron Blanc/Jaune Marron/Vert Blanc/Vert
Marron Vert Bleu
Câble Fonction MC1 +24v 1.6A
2 core Désinfection 0.5mm 0.5mm +24v 1.6A 0.5mm +24v 1.6A
2 core Eau laser 0.5mm MC1 Entrée MC1 Brosses bras
2 core Désinfection 0.5mm MC1 Décro Avt Dt MC1 Décro Arr. Dt MC1 Décro Arr. G MC1 Décro Avt G MC1 Air Laser
2 core Eau Laser 0.5mm
+24V 1.6A +24V 1.6A
MC-1 Pince Avt G MC-1 Pince Arr G MC-1 Pince Arr Dt MC-1 Pince Avt Dt MC-1 Rotation des
brosses MC-2 Vide Avt G MC-2 Vide Arr G MC-2 Vide Arr Dt MC-2 Vide Avt Dt MC-2 +24v commun MC-2 Senseur ok MC-2 0v commun
Départ Arrivée Couleur du fil Câble Fonction JB1-P1-4 PL16-3 Blanc MC2 Signal d’angle trouvé JB1-P2-4 PL11-17 Vert MC2 Signal de senseur ok JB1-P3-2 PL11-15 Blanc/vert MC2 Vide Avant Droit JB1-P4-2 PL11-14 Marron/vert MC2 Vide Arrière Droit JB1-P5-2 PL11=13 Blanc/jaune MC2 Vide Arrière Gauche JB1-P6-2 PL11-12 Jaune/Marron MC2 Vide Avant Gauche JB1-P1/6-1 PL11-16 Marron MC2 24v DC commun JB1-P1/6-3 PL11-18 Bleu MC2 0v commun JB1-P1/6-5 Point de terre Vert/Jaune MC2 Terre
006849 Page 11 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.5 PCB POS 5 (Pièce détachée 094772)
Cette carte est celle de la position principale du bras. Elle est connectée au S-liner, aux senseurs d’angle et au capteur ultra-sons. Elle est utilisée pour déterminer les coordonnées de la position actuelle du bras.
Connecteur N° du fil Couleur du fil Fonc tion Câbl e PL-13 3 Bleu 0V Capteur Ultra-sons PL-13 4 Marron 24V Capteur Ultra-sons PL-13 6 Rose Start Capteur Ultra-sons PL-13 7 Noir Stop Capteur Ultra-sons
Connecteur N° du fil Couleur du fil Fonction Câble
PL-17 2 Rouge Potentiomètre 0V S-lina PL-17 3 Jaune Réglage 0-10V S-lina PL-17 5 Rose Diminuer l’entrée d’air S-lina PL-17 6 Blanc Augmenter l’échapement S-lina PL-17 7 Vert Diminuer l’échapement S-lina PL-17 8 Gris Augmenter l’entrée d’air S-lina PL-17 9 Marron +24V S-lina PL-17 10 Noir +24V S-lina
006849 Page 12 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
Connecteur N° de fil Couleur du fil Fonction Câble
PL-16 6 Blanc Déplacer à droite MC1 Version LH, PL-16 5 Vert Déplacer à gauche MC1 Inversion pour RH PL-16 3 Blanc Signal du senseur d’angle MC2 Connecteur N° de fil Couleur du fil F onction Câble PL-15 1 Bleu 0V S-lina PL-15 2 Orange Interrupteur de S-lina
Surcharge PL-15 3 Turquoise +24V S-lina
Connecteur N° de fil Couleur du fil F onction Câble PL-14 1 Bleu 0V Déplacement PL-14 3 Noir Interrupteur “Pause” Déplacement PL-14 4 Marron +24V Déplacement
006849 Page 13 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.6 PCB CANLIA (Pièce détachée 094986)
Cette PCB est en liaison avec la PCB Pos-5 par un large câble ruban. Cette PCB reçoit l’information du laser et commande le moteur de déplacement du bras, la tête de bras et le vérin S-lina pour les déplacements communs lors du branchement des trayons. La position des cavaliers montrée est correcte pour assurer le bon fonctionnement de la PCB.
1.6.1 ADRESSE MEMOIRE J1
POSITION DU CAVALIER FONC TION PARAMETRE GAUCHE ADRESSE MEMOIRE FAUSSE
DROIT ADRESSE MEMOIRE VRAIE « VRAIE » 006849 Page 14 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
1.6.2 JT1
POSITION DU CAVALIER OUVERT
FERME
PCB du bras – Merlin 225
FONCTION PARAMETRE DEUX CONNECTEURS POUR UTILISATION FUTURE
CAN FONCTIONNANT CE PARAMETRE N’EST BRANCHEMENT NON TERMINE PAS IMPORTANT POUR
UN CONNECTEUR L’INSTANT. CAN FONCTIONNANT HABITUELLEMENT
BRANCHEMENT TERMINE CONSERVE FERME.
1.6.3 JP 400 (Non requis pour le laser statique)
POSITION DU CAVALIER FONCTION PARAMETRE OUVERT LASER « ON » APRES PASSAGE OUVERT
REINITIALISE LE SENSEUR FERME POUR LES FERME LASER CONTINUELLEMENT « ON » OPERATIONS DE TEST.
1.6.4 JP401 (Non requis pour le laser statique)
POSITION DU CAVALIER FONCTION PARAMETRE OUVERT TENSION DU LASER UTILISE REGLER SELON
FERME COURENT DU LASER UTILISE LE TYPE DE LASER DU MERLIN
006849 Page 15 sur 25
Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
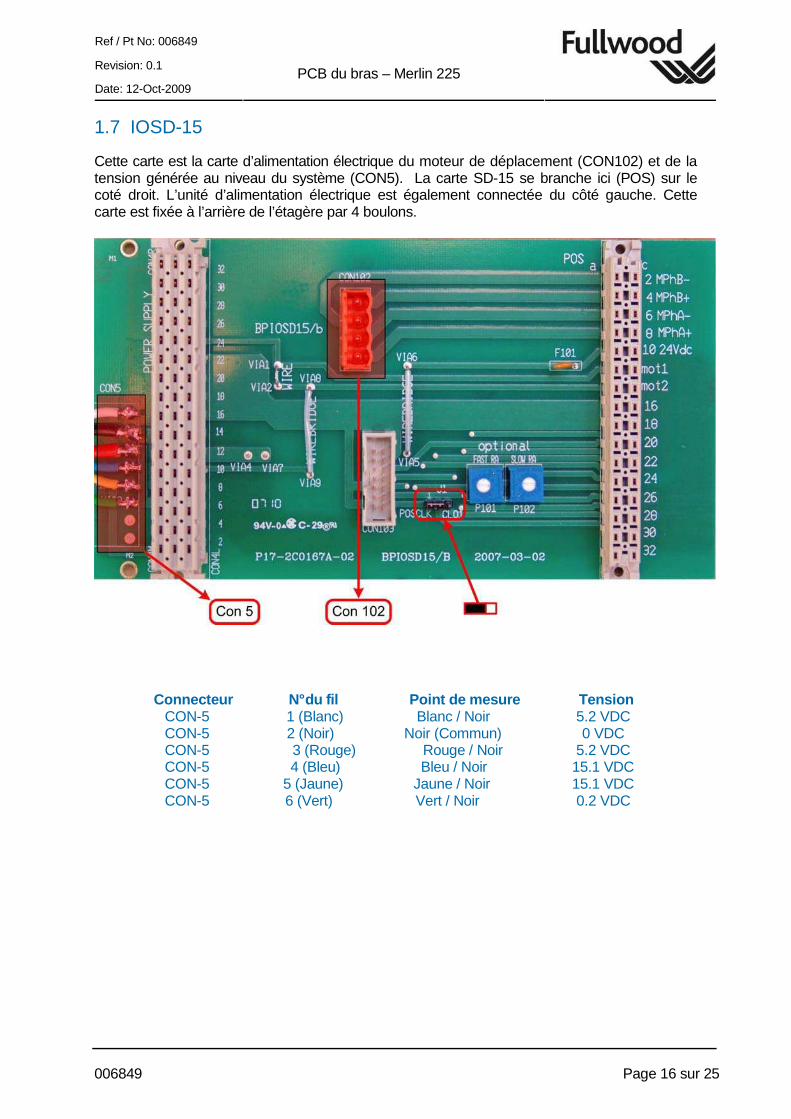
1.7 IOSD-15
PCB du bras – Merlin 225
Cette carte est la carte d’alimentation électrique du moteur de déplacement (CON102) et de la tension générée au niveau du système (CON5). La carte SD-15 se branche ici (POS) sur le coté droit. L’unité d’alimentation électrique est également connectée du côté gauche. Cette carte est fixée à l’arrière de l’étagère par 4 boulons.
Connecteur N° du fil Point de mesure Tension CON-5 1 (Blanc) Blanc / Noir 5.2 VDC CON-5 2 (Noir) Noir (Commun) 0 VDC CON-5 3 (Rouge) Rouge / Noir 5.2 VDC CON-5 4 (Bleu) Bleu / Noir 15.1 VDC CON-5 5 (Jaune) Jaune / Noir 15.1 VDC CON-5 6 (Vert) Vert / Noir 0.2 VDC
006849 Page 16 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.8 SD-15 (Pièce détachée 094623)
Ceci est la carte du moteur de déplacement. Il n’y a pas de fusibles ou de cavaliers à placer.
La carte fonctionnera ou pas de la même manière.
N° d’interrupteur:Fonction
Déplacement
006849
1 2 3 4
0 1 1 1
5 6 7 8 Courant
1 0 0 0 5A
Page 17 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.9 KBDP-13 (Pièce détachée 094779)
C’est la carte située sur le capot de l’armoire de contrôle du bras. C’est l’interface vers le logiciel Crystal, via la UCC. Pour fonctionner correctement, chaque carte a ses valeurs de résistance changée, comme indiqué ci-dessous. Le nom ‘ MODIFIED’ (Modifié) doit être écrit sur chaque carte.
006849 Page 18 sur 25
Valeurs de résistance pour un fonctionnement correct

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
1.10 Menu de contrôle du bras
Le menu de contrôle du bras a plusieurs fonctions, mais il sert principalement au technicien pour paramétrer le robot et trouver les problèmes. L’utilisateur utilise certaines parties du menu mais cela doit être limité. L’utilisateur a essentiellement besoin du menu “Nettoyage laser” et des fonctions du menu “Ajustement laser”.
Ci-dessus: présentation des commandes du bras et des fonctions des boutons de navigation.
Attention : le Merlin doit être mis en mode “off line” avant de débuter la navigation dans le menu. Les menus ne sont pas bloqués par un mot de passe. Ainsi, l’utilisateur peut accéder à tous les réglages de la même manière que le technicien. Assurez-vous que l’utilisateur n’utilise que les deux menus « nettoyage laser » et « ajustement laser » seul, il ne doit pouvoir accéder au reste seulement sous contrôle du technicien.
006849 Page 19 sur 25
Retour à l'écran précédent
Passage à l'écran suivant Valider l'information
Sélection des rubriques du menu ou augmentation des valeurs
Sélection des
rubriques du menu ou diminution des valeurs
Sortie de l'écran du menu actuel

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
1.11Nettoyage du laser
PCB du bras – Merlin 225
Accès de l’utilisateur permis pour lui permettre de nettoyer les faisceaux et la vitre du laser. Nettoyage Laser
Laser en position nettoyage
1.12 Ajustements:
Ajustements Laser – Pas avec laser statique
Abaissement des gobelets et du bras permettant un nettoyage des gobelets en sécurité. Sortir.
Placer les faux trayons Dans les gobelets 3 et 4 Ajuster la position Des faux trayons Angle distance scan 62 130 1
-58 130 1
-62 130 2
T reset= 215
006849
Placer la tige blanche en nylon ou rouller des feuilles de papier dans les 2 quartiers avants. Appuyer sur Enter. Merlin scane la position des faux trayons.
Merlin affiche ces valeurs, Vérifier les valeurs de l’angle du scan 1,2 et 3. D’autres valeurs apparaissent en se décalant vers le bas. La première valeur du scan impair doit être égale à la valeur négative du scan pair. Modifier le chiffre pour ajuster l’angle de l’affichage précédent et passer à la page suivante
Page 20 sur 25
Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
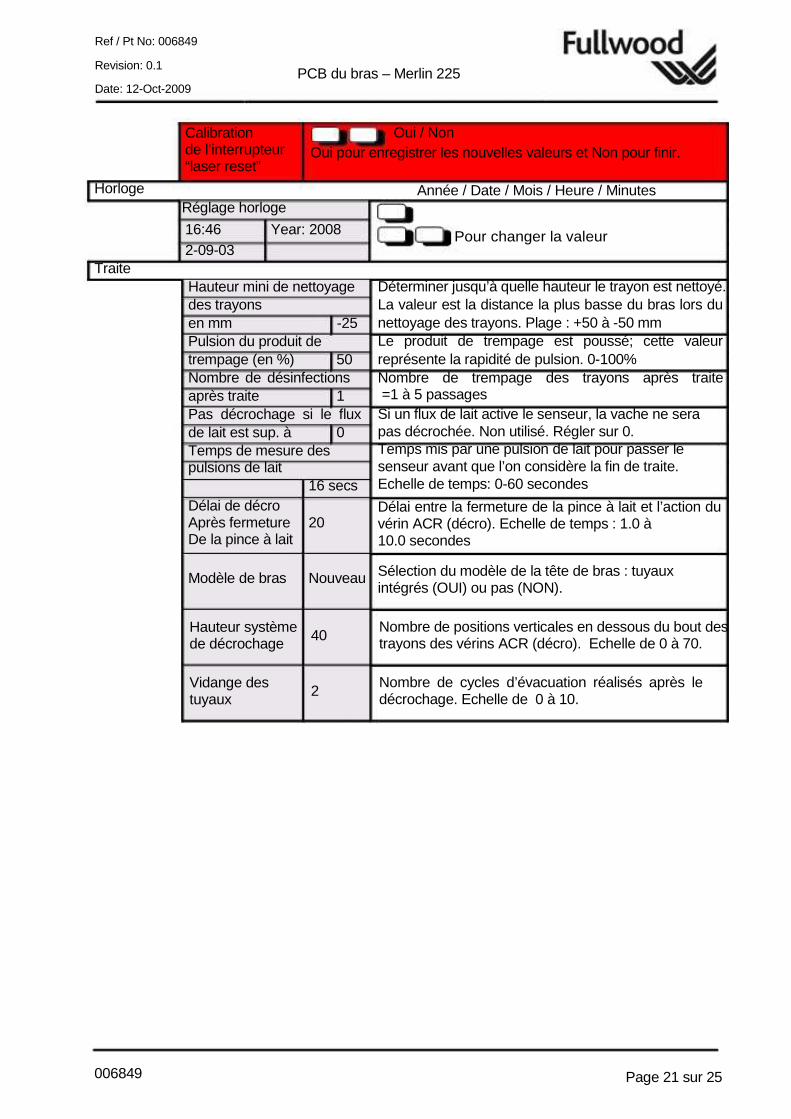
Calibration de l’interrupteur “laser reset”
Horloge Réglage horloge
PCB du bras – Merlin 225
Oui / Non Oui pour enregistrer les nouvelles valeurs et Non pour finir.
Année / Date / Mois / Heure / Minutes
16:46 Year: 2008
2-09-03 Traite
Pour changer la valeur
Hauteur mini de nettoyage des trayons en mm -25 Pulsion du produit de trempage (en %) 50 Nombre de désinfections après traite 1 Pas décrochage si le flux de lait est sup. à 0 Temps de mesure des pulsions de lait 16 secs Délai de décro Après fermeture 20 De la pince à lait
Modèle de bras Nouveau
Déterminer jusqu’à quelle hauteur le trayon est nettoyé. La valeur est la distance la plus basse du bras lors du nettoyage des trayons. Plage : +50 à -50 mm Le produit de trempage est poussé; cette valeur représente la rapidité de pulsion. 0-100% Nombre de trempage des trayons après traite =1 à 5 passages Si un flux de lait active le senseur, la vache ne sera pas décrochée. Non utilisé. Régler sur 0. Temps mis par une pulsion de lait pour passer le senseur avant que l’on considère la fin de traite. Echelle de temps: 0-60 secondes
Délai entre la fermeture de la pince à lait et l’action du vérin ACR (décro). Echelle de temps : 1.0 à 10.0 secondes
Sélection du modèle de la tête de bras : tuyaux intégrés (OUI) ou pas (NON).
006849
Hauteur système de décrochage
Vidange des tuyaux
40
2
Nombre de positions verticales en dessous du bout des trayons des vérins ACR (décro). Echelle de 0 à 70.
Nombre de cycles d’évacuation réalisés après le décrochage. Echelle de 0 à 10.
Page 21 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
1.13 Bras du robot
PCB du bras – Merlin 225
Utilisé par le technicien pour modifier la hauteur et l’angle du bras, la hauteur et l’angle des brosses et la position du bras en mode “Pause”. Les 4 premiers paramètres permettent aux manchons de s’aligner par rapport aux jetters. La position en mode « pause » définie la position centrale de la tête du bras par rapport à la structure. Le réglage de la hauteur des brosses doit être 100 mm en dessous des jetters.
Bras
du robot
Réglage à la hauteur des jetters : Hauteur = 670 Réglage de la hauteur de nettoyage (dessus): Hauteur= 650
Réglage de l’angle par rapport aux jetters Angle = 0
Ajustement de la hauteur des manchons au niveau des jetters pour le nettoyage. Echelle : 300 à 690mm
Habituellement réglé 20 points en dessous du réglage précédent. Echelle : 300 à 690mm
Ajustement de l’angle du bras pour que les manchons soient bien positionnés au niveau des jetters (droits). Echelle : +192 à -89 . Réglage pratique : +-60
006849
Eau de nettoyage Du laser
Air (nettoyage laser)
Compensation Y Recherche trayons Compensation Z Recherche trayons Position « Pause » de la tête de bras Position “Pause” ADC = 0 Angle=
20
20
0
20
0 0
Temps de projection d’eau sur la vitre du laser Echelle 0.1 à 10.0 secondes
Temps de projection d’air sur la vitre du laser Echelle : 0.1 à 1 0.0 secondes Echelle : position 0 à 100.
Echelle : position 0 à 50.
Défini la position centrale de la tête de bras par rapport à la structure. Peut être change uniquement par un technicien formé.
Page 22 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
1.14 Test du bras
PCB du bras – Merlin 225
Le menu “test du bras” permet de tester le laser et les auxilliaires du bras. Test du laser – Pas utilisé avec laser statique
Test du laser Oui
Réinitialiser senseur Off
Fault step motor Off
Distance au point central 75mm
Valeur ADC 81
Moteur du laser
Niveau de faute du laser:
Courant 0 Max:54 Min:0 1 niveau=0,3 9r.= -0.7mm
Position test du système ? Réinitialiser senseur
Faute moteur
Senseur de pression Distance de mesure des
Oui / Non. Selectionner oui puis “Enter”
Le senseur de réinitialisation du laser est dans le boîtier du laser. Si vous tournez le laser à la main, passez le point central et la LED sur le laser doit s’allumer et le senseur de réinitialisation OFF doit se mettre en position ON. Faute du moteur du laser.
Distance de vision du laser et point central du laser. Placer un objet en face du laser et observer la plage de mouvement lorsque l’objet s’éloigne. Le LIA3-CAN ou CANLIA1 PCB doit être réglé en position test pour réaliser cela. Oui / Non pour tester le moteur du laser. Pour verifier si la connection entre le laser et le moteur. MAX-2 MIN-2 IDEAL=0. Si la restriction dépasse
ce mouvement du laser.
Oui Oui / Non. Sélectionner Oui puis “Enter” On Le senseur d’arrêt du moteur de déplacement. Off Moteur de déplacement
O ff Senseur de surpression sur le vérin S-liner
Distance mesurée par ultrason entre le bras et la plaque de suivi. Conserver la même valeur.
ultrasons 185
Vitesse déplacement vertical?
Hauteur courante: ADC=189 389mm Hauteur requise : ADC=188 4 00mm
Plaque de suivi
Vitesse déplacement (angle)
Position x requise ADC=1 0mm Angle-40 1/8 degrés ADC=1 X nu = 0 mm
006849
Cela est ajusté par réglage au niveau du senseur à ultrasons en utilisant l’écrou de blocage. Oui / Non. Sélectionner Oui. Réglage de la vitesse de déplacement vertical pendant le test. Pour tester le fonctionnement du déplacement vertical. Changer la hauteur requise et le bras doit se déplacer en conséquence.
Oui / Non. Bouger la plaque de fesse pour tester le mouvement associé du bras. Oui / Non. Sélectionner Oui. Réglage de la vitesse de déplacement du bras pendant le test.
Pour tester l’angle. Changer l’angle requis et la tête de bras doit se déplacer à gauche ou à droite en conséquence.
Page 23 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
PCB du bras – Merlin 225
Fermé / Ouvert. Si la pompe à vide Pince à lait avant gauche fonctionne, le vide s’échappe du
gobelet lorsqu’elle est ouverte. Pince à lait avant droite Fermé / Ouvert Pince à lait arrière gauche Fermé / Ouvert Pince à lait arrière droite Fermé / Ouvert
Présent / Absent pour vérifier l’action des senseurs de vide. Ouvrir la pince pour libérer le vide puis
Vide avant gauche couvrir progressivement le gobelet à la main jusqu’à l’affichage “Present” puis enlever la main pour afficher : “Absent”.
Vide avant droit Vide arrière gauche Vide arrière droit
Pulsateur
Flux de lait Avt G absent
Flux de lait Avt D absent
Flux de lait Arr G absent
Flux de lait Arr D absent
Désinfection des trayons Brosses de nettoyage Brosses sur gobelets Entrée du bras Senseur d’entrée du bras ON
Décrochage Avt G
Décrochage Avt D Décrochage Arr G Décrochage Arr D Nettoyage laser - eau Nettoyage laser - air
Présent / Absent pour vérifier l’action des senseurs de vide. Présent / Absent pour vérifier l’action des senseurs de vide. Présent / Absent pour vérifier l’action des senseurs de vide. Oui / Non. Ne pas utiliser. Vérifier avec une résistance au niveau du senseur. Placer un fil d’un côté du senseur de flux de lait à l’autre ; L’affichage passera de « absent » à « présent ». L’affichage « présent » correspond à une résistance de 2000 ohms au niveau du senseur. On / Off Tester la pulvérisation Yes / No Tester le fonctionnement des brosses. La vitesse est ajustée au niveau de l’armoire principale. Oui / Non. Placer les brosses au dessus des gobelets. La vitesse est réglée au niveau du bloc Festo CPV. Oui / Non. Entrée du bras dans le stalle. La vitesse est réglée au niveau du bloc Festo CPV. Vérifier l’opération du senseur qui détecte le bras dans la stalle. Oui / Non pour vérifier le fonctionnement du décro. Oui / Non pour vérifier le décro Oui / Non pour vérifier le décro Oui / Non pour vérifier le décro Oui / Non pour vérifier l’eau Oui / Non pour vérifier l’air
006849 Page 24 sur 25

Ref / Pt No: 006849
Revision: 0.1
Date: 12-Oct-2009
1 .15 Menu technicien
PCB du bras – Merlin 225
Le menu technicien est disponible en supprimant l’alimentation électrique, rebranchant l’alimentation et en tenant enfoncé le bouton STOP ; puis attendre l’affichage du menu technicien. Paramètres défaut ? Langue: Départ du flux (Flow start) Fin du flux (Flow end) Mode Test Valeur de compensation :
Oui / Non - Non doit toujours être choisi, suivi par “ENTER” Sélection parmi 8 langues différentes. Utiliser les flèches pour sélectionner la langue. Le paramètre défaut est : 840ms Le paramètre défaut est :480ms Toujours sur 0, sauf sur instructions de Fusion Oui / Non – D’usine, les chiffres X et Y pour chaque trayon sont réglés à 0, sauf pour X – Avt D=15, X- Avt G=-15
Le fait d’appuyer sur STOP à n’importe quel moment vous ramènera au menu standard.
Explication des valeurs de compensation :
Les valeurs de compensation sont seulement ajustées si le branchement d’un trayon n’est pas très précis.
Quand le laser détecte la position des trayons, il essaye de brancher selon cette position. Au cours du temps, la position à laquelle le laser se réfère, comparée à la position réelle de branchement peut changer.
Il est possible de changer les positions X et Y du point de branchement de ± 40 points pour les trayons arrière et ± 60 points pour les trayons avant. (1 point = environ 1mm)
Cela doit être réalisé seulement par le technicien. Dix animaux au moins doivent être observés pendant l’opération de branchement après avoir changé les valeurs !
006849 Page 25 sur 25