
PAR - collectionscanada.gc.ca · Le premier chapitre donne un aperçu de l'évolution de la...
89
ÉCOLE DE TECHNOLOGIE SUPÉRIEURE ~WERSITÉ DU QUÉBEC PROJET DE 9 cRÉDITs PRÉSENTÉ À L'ÉCOLE DE TECHNOLOGIE SUPÉRIEURE COMME EXIGENCE PARTELLE À L'OBTENTION DE LA ML~TRISE EN GÉNIE DE LA PRODUCTION AUTOMATISÉE M. ING, PAR SADREDDINE SARRAY ÉTUDE ET SIMULATION D'UNE COMMANDE DIRECTE DE COUPLE POUR L'ENTFL~NEMENT ÉLECTRIQUE D'UNE MACHINE ASYNCHRONE (D droits réservés de Sadreddine Sarray 2000
Transcript of PAR - collectionscanada.gc.ca · Le premier chapitre donne un aperçu de l'évolution de la...
ÉCOLE DE TECHNOLOGIE SUPÉRIEURE ~WERSITÉ DU QUÉBEC
PROJET DE 9 cRÉDITs PRÉSENTÉ À L'ÉCOLE DE TECHNOLOGIE SUPÉRIEURE
COMME EXIGENCE PARTELLE À L'OBTENTION DE LA
ML~TRISE EN GÉNIE DE LA PRODUCTION AUTOMATISÉE M. ING,
PAR SADREDDINE SARRAY
ÉTUDE ET SIMULATION D'UNE COMMANDE DIRECTE DE COUPLE POUR L'ENTFL~NEMENT ÉLECTRIQUE D'UNE MACHINE ASYNCHRONE
(D droits réservés de Sadreddine Sarray 2000
National Library Bibliothèque nationale du Canada
Acquisitions and Acquisitions et Bibliograp hic Services services bibliographiques
395 Wellington Street 395, rue Wellington Ottawa ON K1A O N 4 Ottawa ON K I A ON4 Canada Canada
Y O U ~ fik votre Mérence
Our nle Notre reldrwrw
The author has granted a non- exclusive licence allowing the National Library of Canada to reproduce, loan, distribute or sell copies of this thesis in microfom, paper or electronic formats.
The author retains ownership of the copyright in this thesis. Neither the thesis nor substantial extracts fkom it may be printed or otheMrise reproduced without the author's permission.
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque nationale du Canada de reproduire, prêter, distribuer ou vendre des copies de cette thèse sous la forme de microfiche/fTim, de reproduction sur papier ou sur format électronique.
L'auteur conserve la propriété du droit d'auteur qui protège cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement reproduits sans son autorisation.
C E PROJET A ÉTÉ ÉvALUÉ PAR UN JURY COMPOSÉ DE
M. Louis A-Dessaint, directeur de projet Département de génie électrique à l'école de technologie supérieure
M. Kamai Ai-Haddad, cadirecteur Département de génie électrique a I'école de technologie supérieure
IL A FAIT L'OBJET D~UNTE PRÉSENTATION DEVANT JURY ET UN PUBLIC LE 1 DECEMBRE 2000
A L'ECOLE DE TECHNOLOGIE SUPÉRIEURE
ÉTUDE ET SIMULATION D'UNE COMMANDE DIRECTE DE COUPLE POUR L~ENTRA~NEMENT ÉLECTRIQUE D~UNE MACHINE ASYNCHRONE
S adreddine Sarray
Sommaire
Ce document porte sur l'étude de la commande directe du couple et l'établissement d'une simulation du systéme englobant la commande et le moteur. L'utilité de ce travail est de simuler cette nouvelle stratégie de commande dans le but de visualiser le comportement dynamique du couple, de la vitesse, du flux et du courant du moteur en régime transitoire et permanent pour différentes charges imposées et pour différentes perturbations, afin d'étudier la stabilité pour cette nouvelle stratégie et de prévoir le comportement dynamique du système avant implantation.
Le premier chapitre donne un aperçu de l'évolution de la commande des machines électriques et l'application des différents types de commandes, tout en insistant sur leurs avantages et inconvénients, pour mettre en valeur l'importance de cette nouvelle stratégie,
Le deuxième chapitre traite des principes théoriques qui ont permis de mettre en œuvre l'idée de cette stratégie de commande.
Le troisième chapitre donne une présentation générale de l'architecture d'implantation de la stratégie de commande.
Le quatrième chapitre traite la modélisation mathématique des différents blocs constituant cette stratégie de commande, sur le logiciel Matlab/SIMULINK.
Le cinquième chapitre donne les résultats de simulation pour un type de moteurs, tout en passant par les calculs nécessaires à l'implantation des différents paramètres dans les blocs de simulation-
Les r6sultats de simulation ont pu montrer l'importance de cette nouvelle stratégie pour des moteurs qui travaillent dans des applications industrielles soumises à beaucoup de perturbations de charge.
Ce projet a donc permis de mettre en œuvre un outil de test permettant de vérifier la validité des paramètres du système avant implantation.

REMERCIEMENTS
Plusieurs personnes ont fait en sorte que mon passage à ~ É T S a été pour moi plus que
profitable. Je tiens a remercier les acteurs(trices) principaux(1es) qui ont participé à ma
formation et à m'assurer les conditions nécessaires de travail.
Mes parents (Mongi Sarray et Mounira Reguig), qui ont payé mes études au Canada, e t
qui m'ont tous le temps encouragés pour persévérer et pour avancer dans le domaine de
l'ingénierie.
Mon oncle, (Moharned Reguig) qui m'encourage tous le temps avec ses conseils très
analytiques.
Mon amie, (Isabelle Latulippe) qui m'a bien supporté moralement pour surmonter des
périodes critiques.
Daoud Ait-Kadi, professeur et directeur du département de génie industriel de
l'université Laval , pour m'avoir orienté vers des axes appliqués dans le domaine de la
production et de la fiabilité des systèmes.
Louis A.Dessaint, professeur en génie électrique et directeur du GREPCI (Groupe de
Recherche en Électronique de Puissance et Commande Industrielle ), qui a accepté de
diriger mes travaux de recherche et m'a offert un sujet d'application très intéressant au
sein de GREPCI.
Kamal Al-Haddad, professeur en génie électrique et directeur des études doctorales a
I'ÉTS, qui a accepté de codirïger mes études et m'a offert toute son attention pour
aboutir à mes résultats académiques.
iii
Maarouf Saad, professeur en génie électrique et directeur du groupe de recherche
Bombardier Transport à I'ÉTS, qui m'a confié la charge de pIwÏeurs laboratoires, et
projets auxiliaires.
SOMMAIRE .......................................................................................... i . * ............................................................................... REMERCIEMENTS -11
TABLE DES MATIÈRES ........................................................................ iv
LISTE DES TABLEAUX ......................................................................... vi . . ............................................................................ LISTE DES FIGURES vil
LISTE DES ABBREVIATIONS ET DES SIGLES ........................................... ix
................................................................................... INTRODUCTION 1
CHAPITRE 1 : ENVIRONNEMENT DES DIFFÉRENTES STRATÉGIES
......................................... 1.1 Applications des différents types de commandes -2 .................................... 1.2 Présentation des différents principes d'entraînements -3
1 .2.1 Entraînement CC .......................................................................... -3 1.2.2 Entraînement CA, régulation de fréquence utilisant la ML1 (P WM) ............... -4 1.2.3 Entraînement CA, commande à flux orienté utilisant la ML1 (P WM) ............... 5
............................. 1.2.4 Entraînement CA, commande directe du couple @TC) -7 ....................................................................................... 1 -3 Conclusion 8
................................... CHAPITRE 2 : PRINCIPE DE LA COMMANDE DTC -10 . ........................................................................................ 2.1 Pnncipe 10
2.2 Cornmuide du flux statorique et du couple électromagnétique ..... .. .................. 11 ................................................................. 2.2.1 Transformation de Park -11
................................. 2.2.2 Comportement dynamique d'un moteur à induction 13 ......................................................... 2.2.3 Valeurs des tensions statoriques 17
........................... 2.2.4 Commande par hystérésis du flux statorique et du couple 19 ........................................................... 2.2.5 Conception de la commande -22
........................................................................ 2.2.6 Modèle du moteur 27
........................................................................ 3.1 Présentation générale -30 ........................................................... 3.2 Boucle de commande du couple -31
........................................................ 3.3 Boucle de commande de la vitesse -32

4.1 Présentation du modèle de simulation de la stratégie de commande DTC ............ 33 ........................................................................... 4.2 Modèle du moteur -34
............................................................... 4.3 Modèle du capteur du moteur 35 ............................................................................. 4.4 Modèle du retard -36
..................................................................... 4.5 Modèle de l'estimateur -36 ............................................. 4.5.1 Application de la Transformation de Park -38 . . .............................................................. 4.5 -2 Recomtution des tensions -39
..................................................... 4.5.3 Reconstitution du flux et du couple -40 .......................................... 4.6 Modèle du régulateur de la vitesse et du couple 41
..................................................... 4.6.1 Calcul de la valeur du couple Lunite 41 ............................................. 4.6.2 Présentation des deux sortes de commande 42
......................................... 4.7 Modèle du sélecteur optimal de la commutation 44 ........................................................ 4.7.1 Détection de la position angulaire 45
.......................................... 4.7.2 Détermination du niveau du couple et du flux 47 ................................................ 4.7.3 Stratégie de sélection des commutations 49
.................................................. 4.8 Modèle du pont convertisseur MOSFET 51 .............................................................. 4.9 Modèle du capteur de courants 52
......................................... CHAPITRE 5 : ÉTUDE DE CAS ET RÉSULTATS 53
........................... 5.1 Calcul des paramètres à injecter dans le modèle de la DTC -53 ................................................... 5 . 1.1 Paramètres du moteur à commander. -53
...................................... 5.1.2 Caractéristiques des moteurs à cage d'écureuil - 3 3 .............. 5.1.3 Calcul des grandeurs à injecter dans la stratégie de commande DTC -54
............................................... 5.2 Interprétation des résultats de la simulation 56 .................................................. 5.2.1 Commande avec consigne de vitesse - 3 6
....................... 5.2.1.1 Calcul des temps de démarrage pour différentes situations -57 ................................................... 5 2.2 Commande avec consigne de couple -59
....................................................................... 5 -3 Conclusion Générale 3 9
........................................................................................... ANNEXE -64
LISTE DES TABLEAUX
Tableau 1 Présentation des variables de contrôle ............................................ 8
............. Tableau II Lien entre tensions statoriques et la séquence de commutation 18
Tableau III Correspondance entre la table optimale de commutation et le signal de
............................................................... sélection de la ligne de commande 49
Tableau N Caractéristiques des moteurs asynchrones triphasés, faible puissance .. - 3 4
LISTE DE: S FIGURES
........................................................................ Figure 1 Entraînement CC 3
............................................... Figure 2 Régulation de fréquence utilisant ML1 4
......................................... Figure 3 Commande à flux orienté utilisarct la ML1 -6
Figure 4 Commande directe du couple (DTC) ...-........................................... -7
.................................................... Figure 5 Principe d'un entraînement DTC 11
............................................. Figure 6 Représentation des tensions statomques 17
......................................... Figure 7 Technique d'orientation du flux srtatorique 20
..................................... Figure 8 Technique de la commande des imtemipteurs -21
.................... Figure 9 Technique de sélection des vecteirus tension de commande -23
.................. Figure 10 Sélection des vecteurs tension pour la commande du couple 24
................................................. Figure 1 1 Table optimale de commutation- -26
...... Figure 12 Représentation du flux rotorique dans le repère lié au stator et ad rotor 28
....................... Figure 13 Modèle général de la stratégie d e commande de la DTC 30
.................................................. ... Figure 14 Modèle de commande adopté - 33 * .................... Figure 1 5 Modèle et interfacegaramètres d e la machine asynchrone 3 4
....................................... Figure 16 Modèle et interfaceqaramètres d u capteur 35
....................................... Figure 1 7 Modèle et interfacegaramètres d u retard -36
................................ Figure 18 Modèle et interfaceqaramètres d e l'estimateur -36
............................................. Figure 19 Modèle mathématique de l ' e sha teur 37
.................................... Figure 20 Modèle et interfaceqaramètres d u régulateur 41
.......................................... Figure 2 1 Modèle mathématique du régulaiteur PI -43
........................................ Figure 22 Modèle et interfaceqaramètres d e 1'OPS 44
.................................... Figure 23 Circuit de détection de la positiorn angulaire -45
Figure 24 Numérotation des secteurs après l'arrondissement par la fonction FLOOR.46
......... Figure 25 Allure du signal de détection justie à la sortie de la fonction FLOOR 46
........ Figure 26 Numérotation fmale des secteurs après le traitement du signal initial 47
........................... Figure 27 Allure du signal de sélection de la position angulaire 47
Figure 28 Conception des différents niveaux de commande du couple et du flux ..... -47
........................................... Figure 29 Modèle de sélection des commutations 50
............ Figure 3 0 Modèle et interfaceqaramètres du pont convertisseur MOSFET -51
.......................................... ...... Figure 3 1 Modèle du capteur de courants .. - 3 2
........................ Figure 32 Conception interne du modèle du capteur de courants .52
LISTE DES ABBREVIATIONS ET DES SIGLES
, , Composantes directe, inverse et homopolaires de la tension du stator
suivant le repère (d,q).
1.d ?q 9 I., Composantes directe, inverse et homopolaires du courant du stator
suivant le repère (d,q).
Tensions instantanées statonques entre ligne et neutre pour chaque phase.
Courants triphasés pour chaque phase.
Courants triphasés pour chaque phase du rotor.
États des commutations.
Tension selon le repère (d,q) en fonction de l'état des commutations.
Composantes du flux statorique selon le repère (d,q).
Composantes du flux rotorique selon le repère (d,q).
Direct Torque Control.
Flux au stator .
Flux au rotor.
Résistance statorique .
Résistance rotorique .
Tension statorique selon le référentiel stationnaire (d,q).
Courant statorique selon le référentiel stationnaire (d,q).
Courant rotorique selon le référentiel stationnaire (d,q).
Courant magnétisant du stator.
Partie imaginaire d'un nombre complexe.
partie réelle d'un nombre complexe.
Nombre imaginaire.
Écart.
Constante.
Transformation inverse de Laplace.
Opérateur de Laplace .
Nombre de paires de pôles.
Fréquence du réseau.
Vitesse de rota?ion de la machine.
Vitesse de rotation de Ia machine.
Vitesse du flux par rapport au rotor-
Vitesse du flux par rapport au stator.
Vitesse de glissement.
Vitesse du champ tournant.
Inductance statonque .
Inductance roto rique .
Inductance mutuelle.
Source de tension continue,
Position angulaire.
Couple électromagnétique.
Couple développé par le moteur.
Couple résistant.
Puissance mécanique.
Puissance transmise au rotor.
Vitesse de rotation du rotor.
Vitesse synchrone-
Glissement.
Capacité d'amortissement (Snubber Capzcitance) .
Résistance d'amortissement (Snubber Résistance).
Moment d'inertie.
Temps de démarrage.

INTRODUCTION
Au cours des demières décennies, la technique des entraînements électriques à vitesse
variable s'est développée rapidement, en premier lieu griice aux progrès accomplis dans
l'électronique de puissance, et aux avantages techniques qu' o E e une machine CA
(Courant Alternatif) par rapport à une machine à courant continu CC (Courant Continu)
tels que la robustesse de la machine, et son faible coût d'achat et d'entretien.
L'une des plus récentes démarches dans cette direction est la régulation directe du
couple (en anglais DTC, direct torque control), qui fournit d'excellentes propriétés de
régulation sans retour de la vitesse de rotation.
Ce travail m'a p e d s de d'approfondir la théorie de conception de cette nouvelle
commande et la mise en œuvre d'un modèle de simulation sur Matlab/Simulink dans le
but de simuler le comportement dynamique de cette stratégie de commande et d'estimer
ses performances.

CHAPITRE 1
ENVIRONNEMENT DES DIFFERENTES STRATEGIES D'ENTRAINEMENTS
1.1 Applications des différents types de commandes : [8],[9],[10],[11]
Dans un entraînement à vitesse variable, le moteur constitue un élément de la boucle de
régulation. Il est donc nécessaire de prendre en compte son comportement dynamique.
Suivant le niveau des performances demandées par l'utilisation, on sera amené à
considérer u n modèle de la machine plus ou moins complexe adapté au type de
commande choisie.
Lorsque les performances dynamiques demandées ne sont pas trop contraignantes
(dérivée du couple électromagnétique assez faible), ce qui est le cas des entraînements
de pompes, ventilateurs, compresseurs,. . . , on peut utiliser des commandes relativement
simples que l'on qualifie souvent de « commandes de type scalaire )) .
Lorsqu'on est plus exigeant sur les performances dynamiques, ce qui est le cas des
machines-outils, des appareils de levage, des entraînements de laminoirs, ..., il est
nécessaire de connaître le courant rotorique pour maîtriser le couple à faible vitesse et
pendant les régimes transitoires. On utilise alors des commandes dites vectorielles "où
à cc flux orienté " qui permettent de contrôler Ies courants statonques et rotoriques et
donc le couple.
Ces commandes, qui utilisent des algorithmes mis en œuvre par des microprocesseurs,
exigent que l'on connaisse la vitesse du moteur. L'utilisation d'un capteur de vitesse
permet d'optimiser les performances sur toute la plage de vitesse, y compris à l'arrêt où
il faut pouvoir imposer la position du rotor.
Lorsqu'il n'est pas nécessaire de réaliser un couple important à vitesse nulle et qu'il n'y
a pas de contrainte de positionnement à l'arrêt, les technologies récentes de
I'électronique de commande permettent de sY&anchir de la présence d'un capteur de
vitesse pour réaliser une commande directe du couple. La commande des semi-

conducteurs de l'onduleur est directement déterminée par calcul à partir d'un modèle
approprié du moteur et de la mesure des tensions et courants statoriques.
1.2 Présentation des différents principes d'entraînements :
1.2.1 Entraînement CC :
Les bonnes performances de régulation du couple de l'entraînement CC sont fondées sur
la commande du courant de champ (flwc) et du courant de l'induit (couple). La
régulation précise de la vitesse est fournie par un signal de retour tachymétrique.
L'entraînement CC est simple et fiable, mais les moteurs CC sont formés d'un plus
grand nombre de composants sujets à usure que les moteurs CA.
Figure 1 : Entrainement CC
Caractéristiques :
- Orientation du flux via un commutateur mécanique.
- Les variables de commande sont le courant d'armature et le courant d'excitation qui
sont mesurés directement du moteur.
- La commande du couple est directe.
Avantages :
- Précision et rapidité sur la commande du couple;
- Très bonne réponse dynamique de vitesse;
- Commande simple.
Inconvénients :
- Fiabilité réduite du moteur.
- Maintenance régulière,
- Coût élevé du moteur.
- Besoin d'un encodeur de vitesse ou de position pour fermer la boucle de commande.
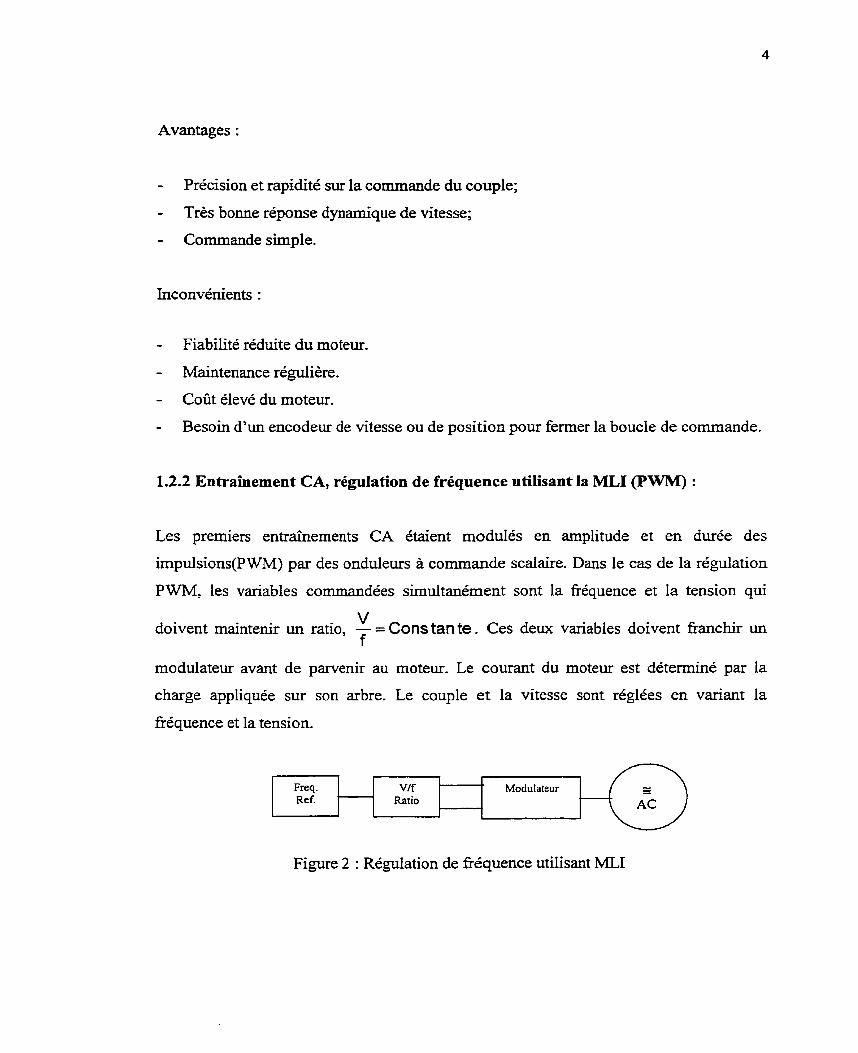
1.2.2 Entraînement CA, régulation de fréquence utiIisant Ia ML1 (PWM) :
Les premiers entraînements CA étaient modulés en amplitude et en ciurée des
impulsions(PWM) par des onduleurs à commande scalaire. Dans le cas de la régulation
PWM, les variables commandées simultanément sont la fréquence et la tension qui
v doivent maintenir un ratio, - =Cons tan te. Ces deux variables doivent franchir un
f
modulateur avant de parvenir au moteur. Le courant du moteur est déterminé par la
charge appliquée sur son arbre. Le couple et la vitesse sont réglées en variant la
fréquence et la tension.
Figure 2 : Régulation de fiéquence utilisant ML1
Freq. Ref. '"
V/f Ratio
Modulateur
Caractéristiques :
- Les variables de contrôle sont la tension et la fiéquence.
v - Le flux est conditionné par le maintien du ratio - = Cons tan te . f
- L'architecture de cornmancie est à boucle ouverte.
- La charge impose la valeur du couple.
Avantages :
- Faible coût-
- Comrnar,de à boucle ouverte.
Inconvénients :
- L'orientation du flux n'est pas utilisée.
- Le couple n'est pas contrôlé.
- Utilisation d'un modulateur qui freine la rapidité de la communication entre, la
tension d'alimentation, et le signal de fréquence, et le besoin du moteur de répondre
a ces changements de signaux.
1.2.3 Entraînement CA, commande à flux orienté utilisant la ML1 (PWM) :
Dans cette stratégie de contrôle, la commande du couple exige la rétrosignalisation de la
vitesse qui peut être soit mesurée, soit estimée. Une valeur de référence de vitesse ou de
couple, est convertie en valeurs de référence de tension et de fiéquence qui sont
introduites dans l'unité de commande de l'onduleur et comparées avec les signaux
mesurés.

La commande de l'onduleur est effectuée par l'intermédiaire d'un modulateur et on
obtient une précision de vitesse statique relativement bonne.
Figure 3 : Commande à flux orienté utilisant la ML1
Caractéristiques :
- Contrôler l'orientation du flux, dans le but de ramener l'étude de la machine
triphasée à une machine à courant continu.
- Commande en boucle fermée.
- Le couple est directement contrôlé par une composante du courant statorique.
Avantages :
- Bonne réponse du couple.
- Précision au niveau du contrôle de la vitesse.
- Performance similaire a l'entraînement CC.
Inconvénients :
- Boucle de retour est obligatoire.
- Méthode coûteuse.
- Besoin d'un modulateur.
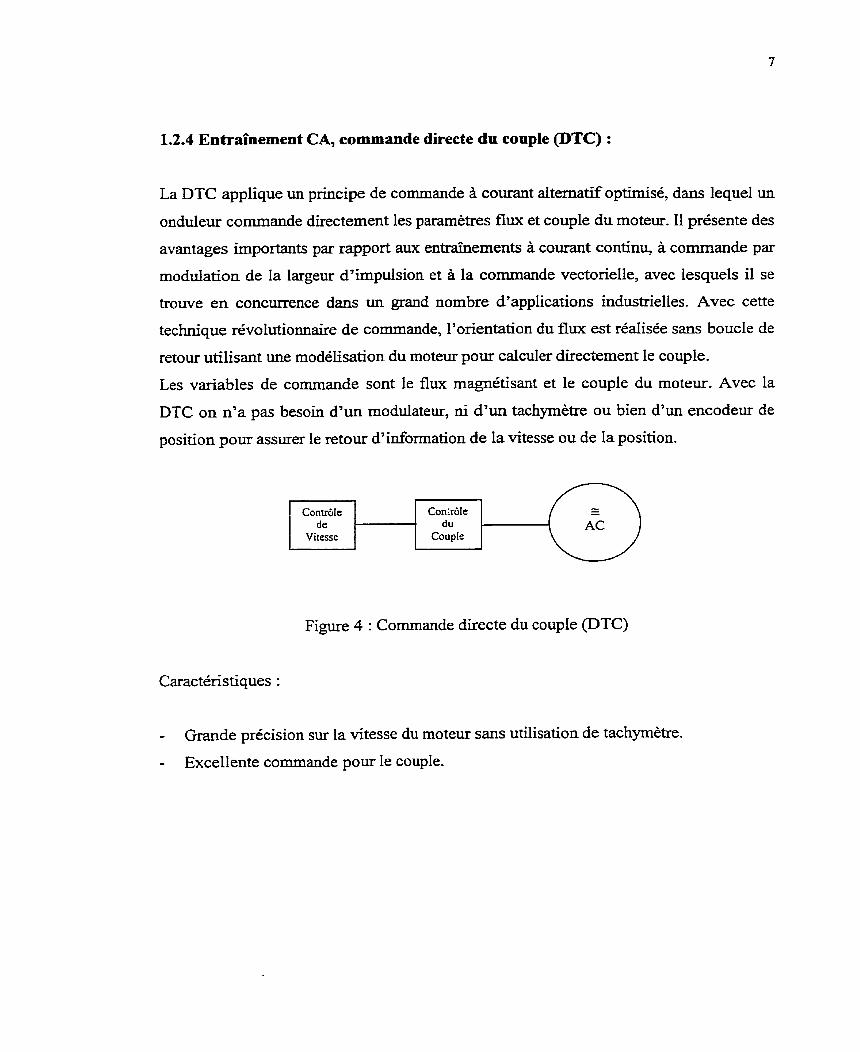
1.2.4 Entraînement CA, commande directe du couple @TC) :
La DTC applique un principe de commande à courant alternatif optimisé, dans lequel un
onduleur commande directement les paramètres flux et couple du moteur. Il présente des
avantages importants par rapport aux entraînements à courant continu, à commande par
modulation de la largeur d'impulsion et a la commande vectorielle, avec lesquels il se
trouve en concurrence dans un grand nombre d'applications industrielles. Avec cette
technique révolutionnaire de commande, l'orientation du flux est réalisée sans boucle de
retour utilisant une modélisation du moteur pour calculer direczement le couple.
Les variables de commande sont le flux magnétisant et le couple du moteur- Avec la
DTC on n'a pas besoin d'un modulateur, ni d'un tachymètre ou bien d'un encodeur de
position pour assurer le retour d'information de la vitesse ou de la position.
Contrf le Conrrôle
Couple
Figure 4 : Commande directe du couple (DTC)
Caractéristiques :
- Grande précision sur la vitesse du moteur sans utilisation de tachymètre.
- Excellente commande pour le couple.
Avantages :
- Performances similaires au moteur CC mais sans retour tachyrnètrique.
- Couple de référence à vitesse nulle.
- Un meilleur processus de commande.
- Augmentation de la fiabilité et diminution des coûts.
1.3 Conclusion :
Une observation primaire montre une similarité entre le bloc de contrôle de la
commande CC (Figure :1) et celle du DTC (Figure :4) . Les deux utilisent les paramètres
du moteur pour la commande directe du couple. Mais DTC a l'avantage de ne pas avoir
un feed-back et bénéficie des avantages du moteur AC et ne demande pas une excitation
extérieure.
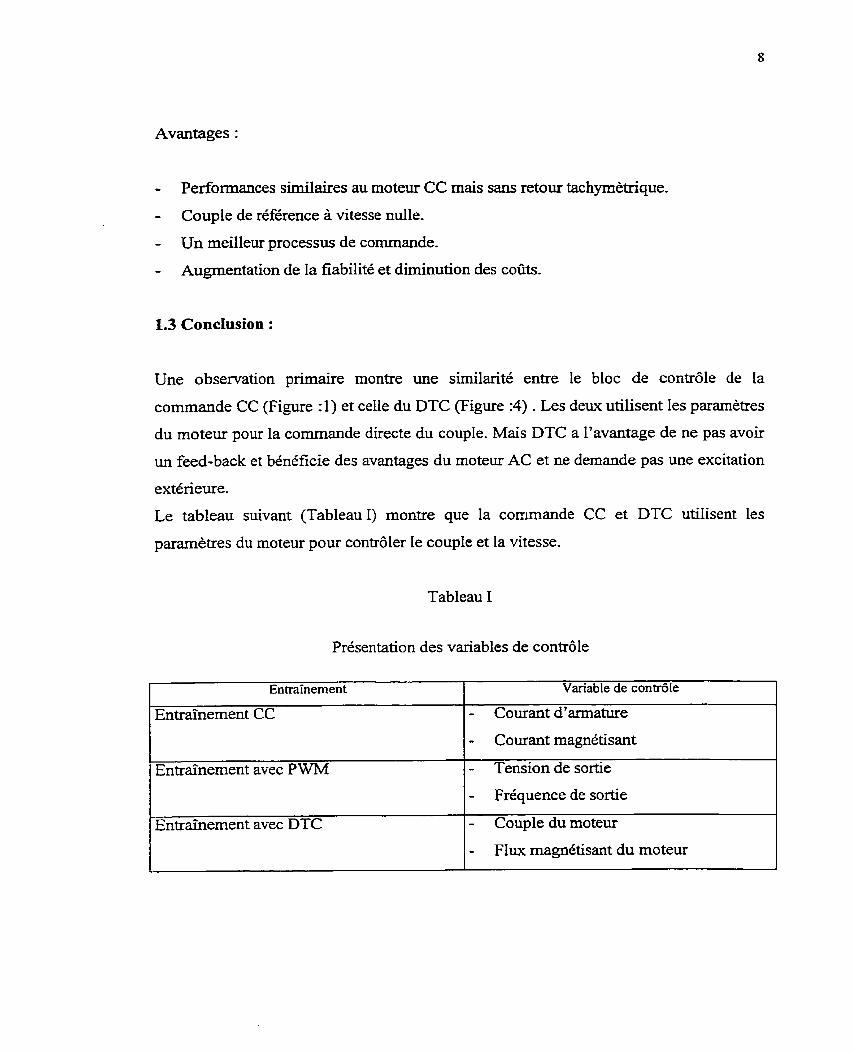
Le tableau suivant (Tableau 1) montre que la co~unande CC et DTC utilisent les
paramètres du moteur pour contrôler le couple et la vitesse.
Tableau 1
Présentation des variables de contrôle
Entraînement
I 1 - Courant magnétisant I
Variable de contrôle
Entrabernent CC
1
Entraînement avec P WM 1 - Tension de sortie
- Courant d'armature
1 - Fréquence de sortie
I 1 - Flux magnétisant du moteur I Entraînement avec DTC - Couple du moteur
Comparant l'entraînement DTC Figure :4)avec les deux autres stratégies
d'entraînement CA (Figure :2 et 3), montre plusieurs différences dont la plus importante
est la dispensabilité du modulateur dans la DTC.
Avec la commande ML1 (PWM), les variables de contrôle sont fiéquence et tension qui
doivent passer par un onduleur pour assurer Ia régulation des courants avant d'attaquer
la machine lorsque la DTC commande directement l'onduleur à partir des erreurs de
couple et de vitesse; grossièrement on peut conclure qu'avec la ML1 (PWM) le contrôle
est conçu au niveau du contrôleur electrique, mais pas au niveau du moteur.
CHAPITRE 2
PRINCIPE DE LA COMMANDE DTC
Les méthodes de commande directe du couple DTC consistent à commander
directement la fermeture ou l'ouverture des interrupteurs de I'onduleur à partir des
valeurs calculées du flux statorique et du couple.
Les changements d'état des interrupteurs sont liés à l'évolution de Ktat
électromagnétique du moteur. Ils ne sont plus commandés à partir des consignes de
tension et de fréquence donnée à la commande rapprochée d'un onduleur à modulation
de largeur d'impulsion.
La commande des interrupteurs a pour but de donner au vecteur représentant le flux
statorique la direction déterminée par les valeurs de consigne.
2.1 Principe : [3]
Pour connaître l'état électromagnétique du moteur Afin de déterminer la commande des
interrupteurs de I'onduleur, il faut disposer d'un modèle approprié de la machine.
À partir des mesures de la tension continue à l'entrée de l'onduleur (ou des tensions aux
bornes du moteur) et des courants statoriques, le modèle donne à chaque instant :
- le flux réel dans la machine.
- !e couple réel qu'elle développe.
- sa vitesse de rotation.
La mesure de la vitesse de l'arbre n'est pas nécessaire, ce qui est un grand avantage de
ces méthodes.
Le flux et le couple ainsi calculés sont comparés à leurs valeurs de référence pour
déterminer les instants de commande des interrupteurs.
D'ordinaire on cherche à maintenir le flux constant.
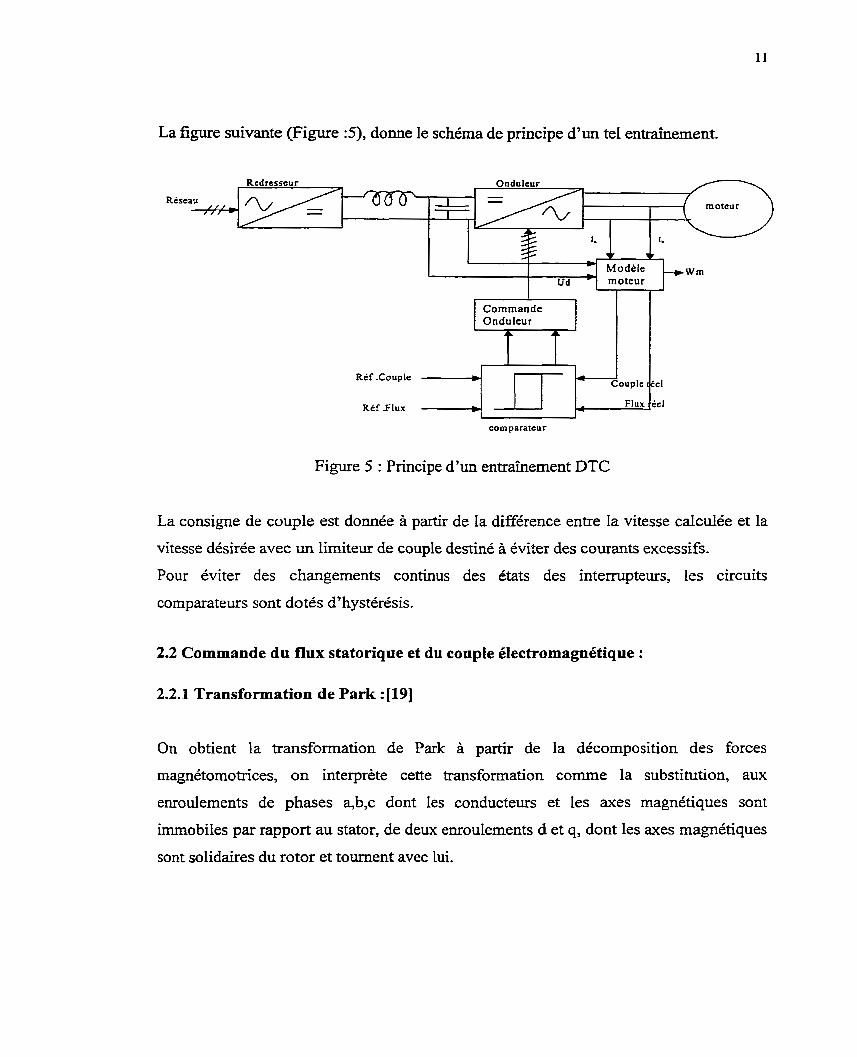
La figure suivante (Figure :5), donne le schéma de principe d'un tel entraînement.
Redresseur
Riseau
Commande Onduleur
Rif .Flux
comparateur
Figure 5 : Principe d'un entraînement DTC
La consigne de couple est donnée à partir de la différence entre la vitesse calculée et la
vitesse désirée avec un limiteur de couple destiné à éviter des courants excessifs.
Pour éviter des changements continus des états des interrupteurs, les circuits
comparateurs sont dotés d'hystérésis.
2.2 Commande du flux statorique et du coupIe éiectromagnétique :
2.2.1 Transformation de Park : [lg j
On obtient la transformation de Park à partir de la décomposition des forces
magnétomotrices, on interprète cette transformation comme la substitution, aux
enroulements de phases a,b,c dont les conducteurs et les axes magnétiques sont
immobiles par rapport au stator, de deux enroulements d et q, dont les axes magnétiques
sont solidaires du rotor et tournent avec lui.
Cependant les conducteurs constituant les nouveaux enroulements doivent toujours être
considérés comme immobiles, et de ce fait les enroulements d et q sont tout à fait
analogues à ceux de l'induit d'une machine à courant continu,
La transformation de Park peut être interprétée comme associant fictivement aux
enrouIements a,b,c un collecteur immobile et des baiais tournant avec le rotor, et
disposées selon l'axe (Od) et selon l'axe (Oq).
11 n'y a pas de représentation physique similaire pour la composante d'indice O, en
raison du fait qu'une composante homopolaire de courant crée une f.m.m d'entrefer
nulle.
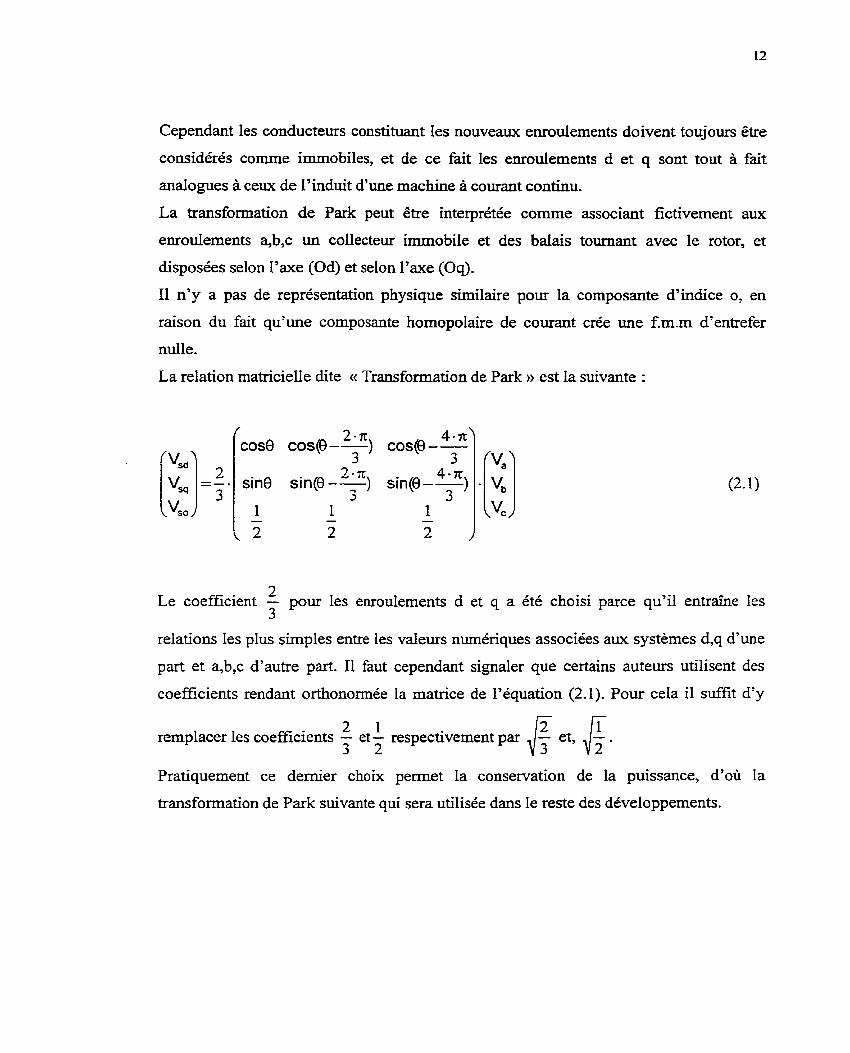
La relation matricielle dite (( Transformation de Park >> est la suivante :
L Le coefficient - pour les enroulements d et q a été choisi parce qu'il entraine les
3
relations les plus simples entre les valeurs numériques associées aux systèmes d,q d'une
part et a,b,c d'autre part. Il faut cependant signaler que certains auteurs utilisent des
coeff~cients rendant orthonormée la matrice de l'équation (2.1). Pour cela il suffit d'y
2 1 remplacer Les coefficients - et- respectivement par et, K.
3 2
Pratiquement ce dernier choix permet la conservation de la puissance, d'où la
transformation de Park suivante qui sera utilisée dans le reste des développements.

2.2.2 Comportement dynamique d'un moteur à induction : [7J
En utilisant la représentation vectorielle instantanée, on va pouvoir étudier le
comportement de la machine en régime transitoire et permanent dans le but de connaî~e
la réponse du couple en régime transitoire.
Le vecteur de tension primaire au stator selon le référentiel stationnaire (d,q) est défini
par l'expression suivante :
où V, ,Vb ,Vc représentent les tensions instantanés primaire entre ligne et neutre. De
même le vecteur courant au primaire et au secondaire, sont exprimés comme suit :

Soit les équations d'un moteur asynchrone à 2 pôles :
soit à étudier la réponse du couple à un échelon de vitesse sous les conditions suivante :
a, constant, amplitude constante du courant magnétisant io du stator.
is et io peuvent être écrit comme suit :
où Io est considérée comme référence constante et go un angle entre io et l'axe d .
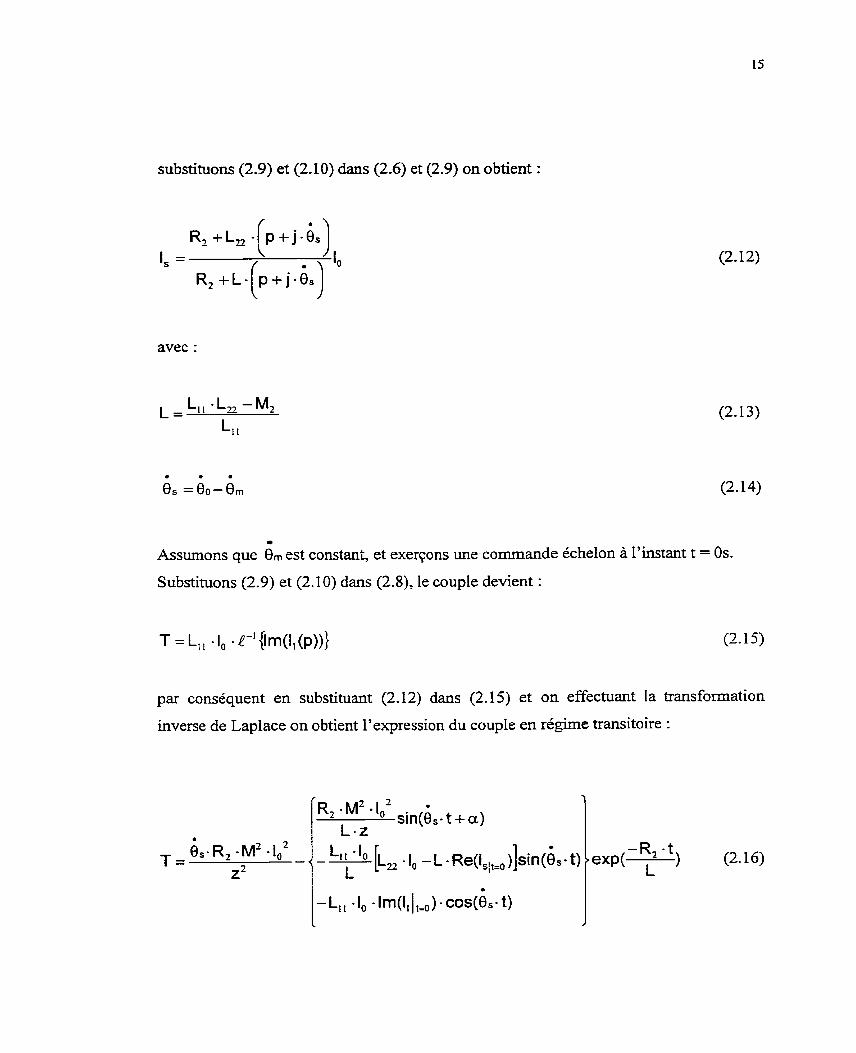
substituons (2.9) et (2.10) dans (2.6) et (2.9) on obtient :
avec :
Assumons que 9 m est constant, et exerçons une commande échelon à l'instant t = Os.
Substituons (2.9) et (2.10) dans (2.8), le couple devient :
par conséquent en substituant (2.12) dans (2.15) et on effectuant la transformation
inverse de Laplace on obtient l'expression du couple en régime transitoire :

avec :
Cette équation représente la réponse du couple à un échelon de vitesse Bssous un
flux as constant, le premier et deuxième terme de (2.14) montrent respectivement l'état
permanent et transitoire.
Si on dérive l'expression du couple par rapport au temps on obtient l'équation suivante :
d'où, la réponse rapide du couple peut être atteinte en utilisant le plus possible la L
vitesse es . Ce résultat nous permettra de conclure que la proportion de croissance du couple est
pratiquement proportionnelle à 8 O , vu que : 8 s = 00 - 8 m , tout en tenant compte de
O
Q,, qui est supposé constant d'après les hypothèses de départ.
2.2.3 valeurs des tensions statoriques : [5],[7
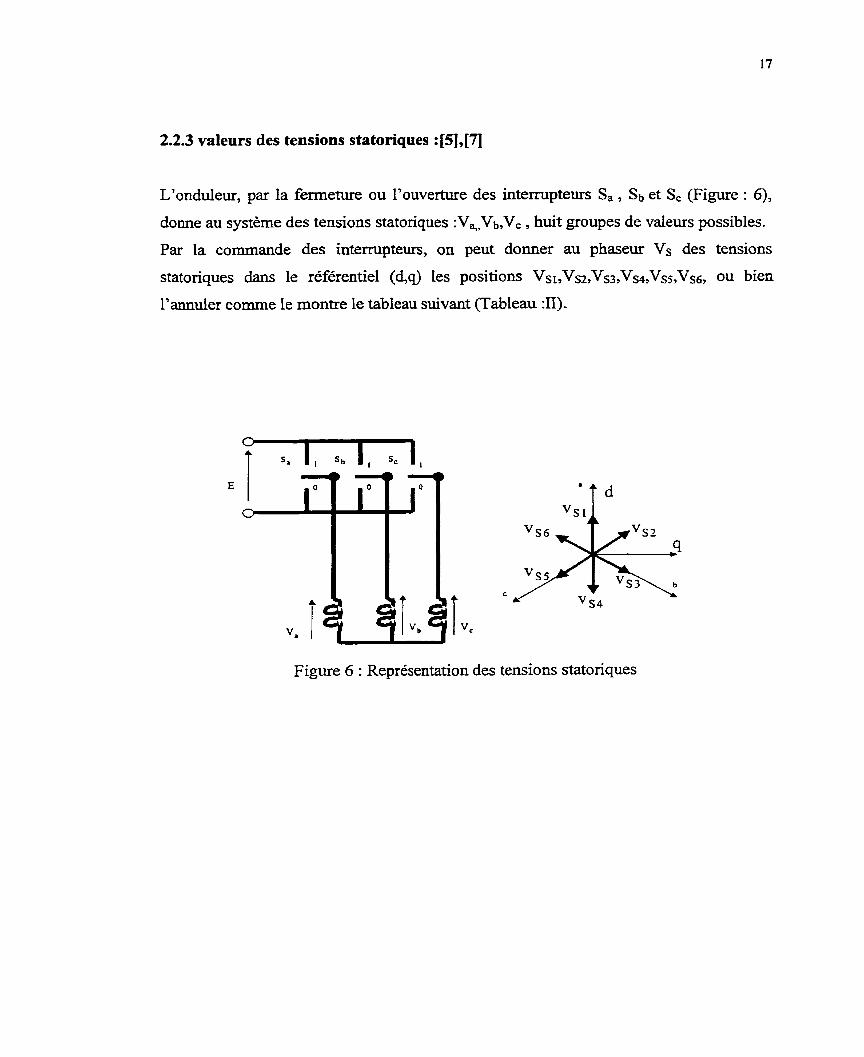
L'onduleur, par la fermeture ou l'ouverture des interrupteurs Sa , Sb et Sc (Figure : 6),
d o ~ e au système des tensions statoriques :V,,Vb,V, , huit groupes de valeurs possibles.
Par la commande des interrupteurs, on peut donner au phaseur Vs des tensions
statoriques dans le référentiel (d,@ les positions Vsi,Vs2,Vs3,Vs4,Vs5,Vss, OU bien
l'annuler comme le montre le tableau suivant (Tableau :II)-
Figure 6 : Représentation des tensions statonques
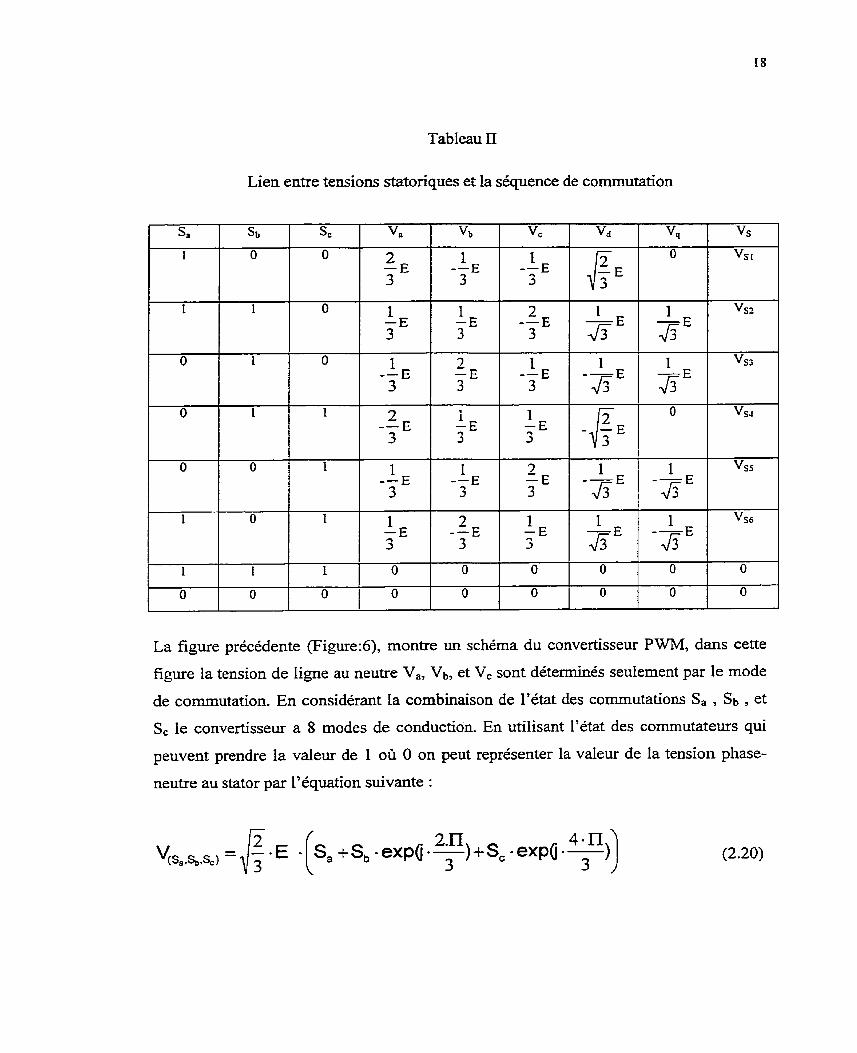
Tableau II
Lien entre tensions statoriques et la séquence de commutation
La figure précédente (Figure:6), montre un schéma du convertisseur PWM, dans cette
figure la tension de ligne au neutre Va, Vb, et Vc sont déterminés seulement par le mode
de commutation. En considérant la combinaison de l'état des commutations Sa , Sb et
Sc le convertisseur a 8 modes de conduction. En utilisant l'état des commutateurs qui
peuvent prendre la valeur de 1 où O on peut représenter la valeur de la tension phase-
neutre au stator par l'équation suivante :

Remarque :
- On signale bien que, la composante homopolaire est nulle, vu que le neutre du
moteur n'est pas connecté au neutre du réseau.
- l'équation (2.1 8) donne la composante directe sur le référentiel (d,q).
2.2.4 Commande par hystérésis du flux statorique et du couple : [3],[q
On peut représenter les vecteurs flux et courant dans le référentiel (d,q). Dans ce
référentiel on suit la rotation des vecteurs flux statorique +s, flux rotorique @R, et courant
statorique il . (Figure : 7 )
sachant que l'expression du flux est décrite par une intégrale du vecteur tension
substituons (2.7) dans l'équation du stator (2.6), on obtient l'expression suivante du
flux:
Sachant que durant la durée de I'intervalle de commutation, chaque vecteur
V(O,O,O). . . . . . .V(l, 1 J) est constant donc en substituant (2.20) dans (2.2 1) donne :

Figure 7 : Technique d'orientation du flux statorique
Il y a 6 vecteurs tension et 2 sortes de vecteurs nuIs vaiables pour orienter le flux à
chaque pas pour qu'il se rndienne dans la bande de I'hysteresis. Le vecteur $s est
maintenu entre deux vdeurs et $sminr Le passage de l'une à l'autre, étant
commandé par la tension Vs. Si le vecteur de commande est l'un des vecteurs non nuls,
0, évolue avec une vitesse constante proportionnelle à la tension de commande. Si l'on
maintient O, à peu près constant , le couple ne dépend que de y. Pour répondre à une
demande de variation rapide du couple, il suffit donc de modifier rapidement le
déphasage y entre les deux flux.
Par exemple quand $s atteint la valeur on déclenche le changement d' intempteurs
pour que la nouvelle valeur de Vs entraîne une diminution du module de 4s. En même
temps la nouvelle phase du vecteur Vs provoque le décalage Is et $s dans le sens de
rotation, fait augmenter y et le couple. Quand +s sera tombé à la valeur $srni, . on
commandera la commutation suivante. La fi-pre suivante (Figure :8) présente un résumé
sur Ia technique de la commande des interrupteurs.
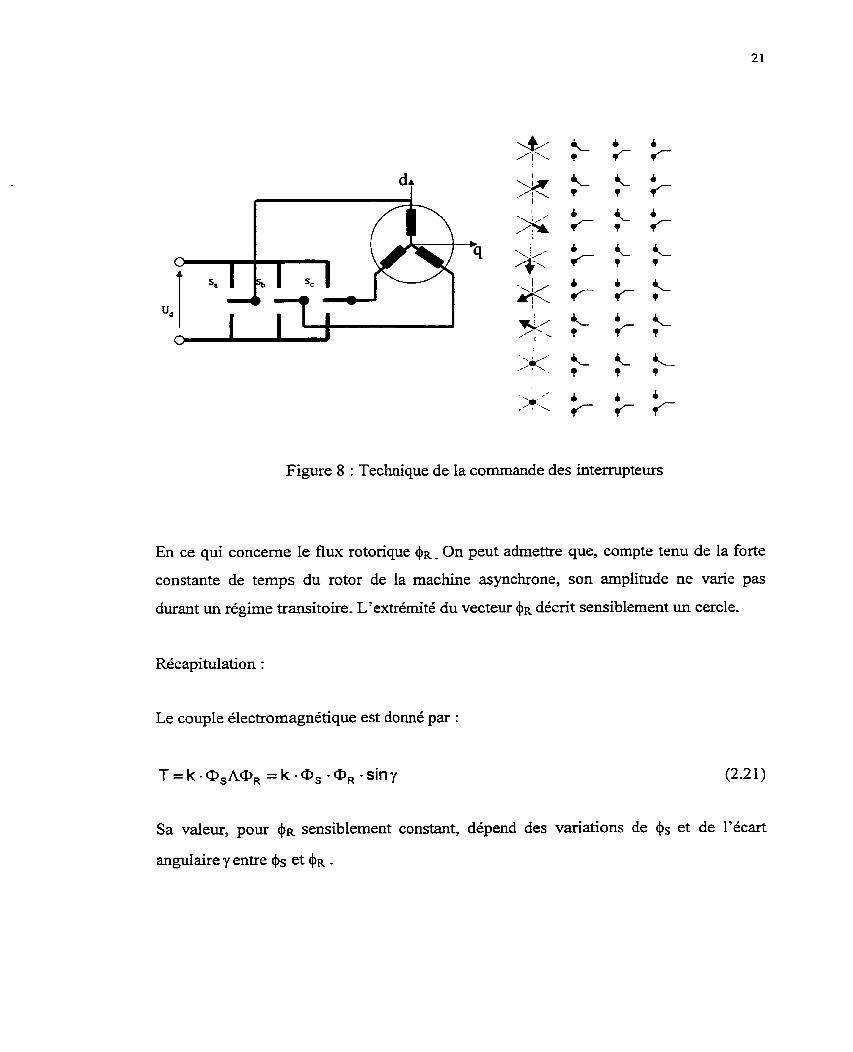
Figure 8 : Technique de la commande des interrupteurs
En ce qui concerne le flux rotorique OR On peut admettre que, compte tenu de la forte
constante de temps du rotor de la machine asynchrone, son amplitude ne varie pas
durant un régime transitoire. L'extrémité du vecteur OR décrit sensiblement un cercle.
Récapitulation :
Le couple électromagnétique est donné par :
Sa valeur, pour +R sensiblement constant, dépend des variations de $s et de l'écart
angulaire y entre $s et @R .
Si l'on maintient +s à peu près constant, le couple ne dépend plus que dey. Pour
répondre à m e demande de variation rapide du couple, il suffit donc de modifier
rapidement le déphasage y entre les deux flux.
2.2.5 Conception de la commande :
Dans une commande vectorielle classique, la commande est du type synchrone. Le
vecteur tension d'amplitude constante avance par bonds réguliers à une cadence définie
par la fkéquence de la commande. Pour le contrôle direct du couple, il faut que la
commande soit asynchrone Afin qu'à chaque instant on puisse régler le flux statorique
donc le couple fourni par le moteur. La logique de commande des intempteurs définit le
choix du meilleur vecteur Vs pour obtenir le couple demandé et optimiser l'amplitude
du vecteur +s-
La figure suivante (Figure :9), donne un exemple de commande du module du flux. En
effet la sélection du vecteur tension Vs(Sa,Sb,S~ est faite de telle façon que l'erreur
entre l@, 1 et la, 1' référence, satisfasse la relation suivante :
La sélection ne dépend pas seulement de l'erreur sur l'amplitude mais aussi de la
direction delaSI. Comme montré à la figure suivante (Figure :9), la tension de sortie du
n convertisseur change périodiquement avec un pas de - , bien entendu il faut détecter la
3
position angulaire du vecteur flux I0,I dans le plan (d'a pour pouvoir choisir la
direction adéquate du vecteur tension de commande.

Les limites inférieure et supérieure de la position sont données par la relation suivante :
Figure 9: Technique de sélection des vecteurs tension de commande
Par exemple; si le flux CD, est dans la région 8(2); Vs3(0,1 ,O) et Vs4(0,1, l), vont satisfaire
les conditions de la relation (2.23). Donc quand @, atteint la limite supérieure imposée
sur le flux, on doit sélectionner Vs4(O,l71). Quand @, atteint la limite inférieure
imposée sur le flux, on doit sélectionner Vs3(0, 1 ,O).
On remarque que le choix de VS3, et VS4 a été fait de façon à assurer l'évolution du flux
dans le sens horaire, l'application de cette technique rend possible l'existence d'un flux
0, constant en sélectionnant les tensions de commande appropriées.
Tout en étant en accord avec l'équation (2.19); sous un flux constant, la proportion de
croissance du couple est pratiquement proportionnelle à 8 , , cependant quand le couple
T est petit comparativement au couple de référenceTe , ii est nécessaire d'augmenter
le couple le plus rapidement possible en appelant la plus rapide vitesse 0 O .
Les vecteurs qui vont accélérer la grandeur dans le sens de rotation d'une aiguille d'une
montre, ne peuvent être sélectionnés qu'en fonction de la position angulaire du flux.
Quand T atteint, T* ; il est préférable de le faire décroître le plus lentement possible
pour faire décroître la fréquence de commutation des intemipteurs.
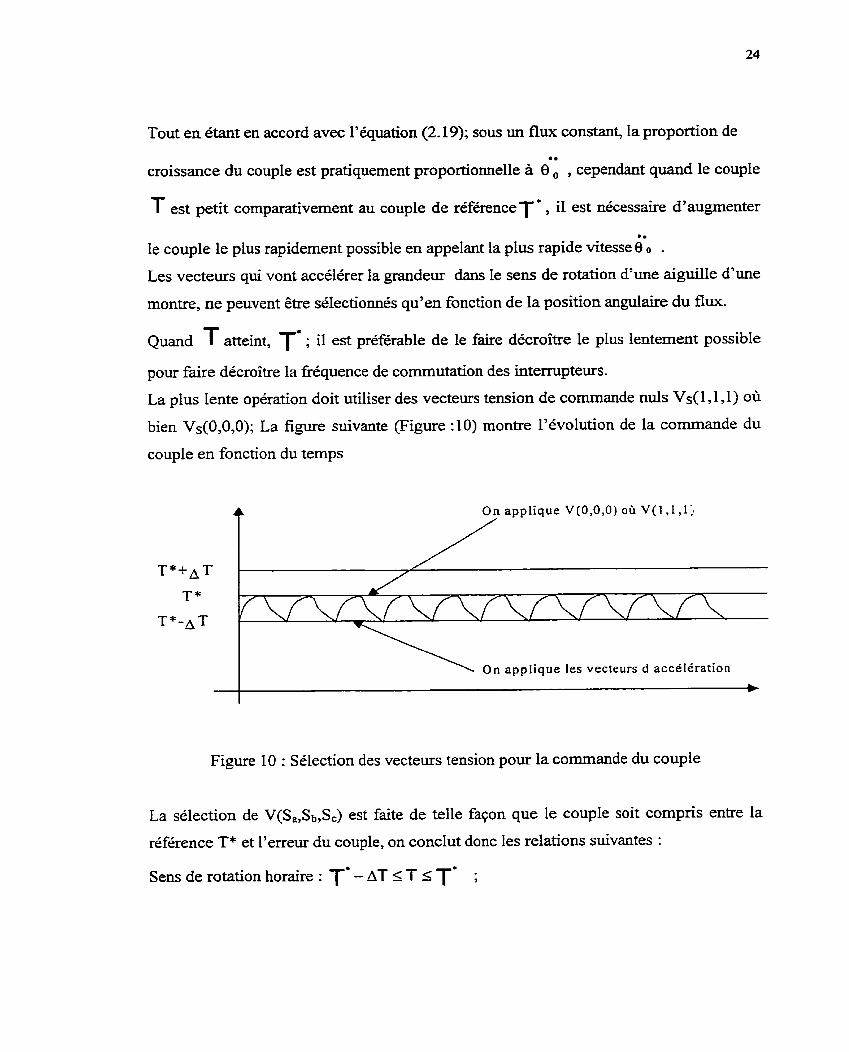
La plus lente opération doit utiliser des vecteurs tension de commande nuls Vs(l, 1 '1) où
bien Vs(O,OoO); La figure suivante (Figure :lO) montre l'évolution de la commande du
couple en fonction du temps
On appl ique V(O,O,O) où V(1 , I , I l
T*+AT
T*
T*-AT
O n appl ique les vecteurs d accélération
b
Figure 10 : Sélection des vecteurs tension pour la commande du couple
La sélection de V(Sa,Sb,Sa est faite de telle façon que le couple soit compris entre la
référence T* et l'erreur du couple, on conclut donc les relations suivantes :
Sens de rotation horaire : T* - AT 5 T 5 TT' ;
Sens de rotation anti-horaire : T* 5 T < T* + AT ;
Supposons que a, tourne dans le sens de rotation horaire. Quant T atteint T* le vecteur
nul V(O,O,O) où V(1,1,1) est sélectionné pour arrêter a, et faire décroître T . d'autre
part quand T atteint T' - AT un des vecteurs d'accélération qui fait tourner 0, dans le
sens horaire est sélectionné.
Pour une rotation dans le sens antitihoraire ; c'est la même stratégie, on sélectionne le
vecteur V(O,O,O) où V(1,1,1), si on atteint T* et on sélectionne les vecteurs
d'accélération si on atteint : T* t AT.
Dans la figure suivante (Figure : l 1)' l'erreur du flux a, et du couple T a été détectée et
digitalisée par des comparateurs hystérésis.
Le contenu de la table de commutation est déterminé en fonction des erreurs et de la
position angulaire B(N) qui a été déterminée en comparant les composantes du
flux as sur l'axe (d,q).
La combinaison de ces 3 données définit la sortie correspondante au vecteur tension
V(S,ySbyS,)
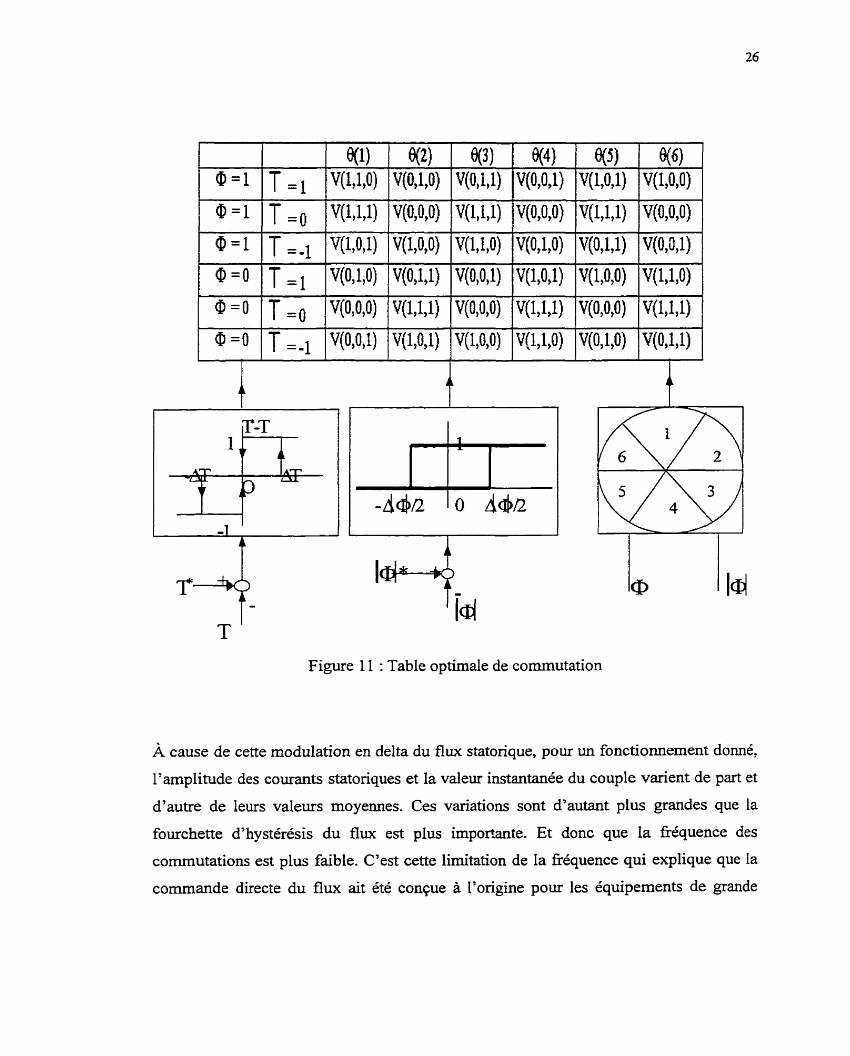
Figure 11 : Table optimale de commutation
À cause de cette modulation en delta du flux statorique, pour un fonctionnement donné,
l'amplitude des courants statoriques et la valeur instantanée du couple varient de part et
d'autre de leurs valeurs moyennes. Ces variations sont d'autant plus grandes que la
fourchette d'hystérésis du flux est plus importante. Et donc que la fi6quence des
commutations est plus faible. C'est cette limitation de la fréquence qui explique que la
commande directe du flw ait été conçue à l'origine pour les équipements de grande
puissance, les semi-conducteurs utilisés pour réaliser l'onduleur ne permettent pas des
fkéquences de commutation supérieure au kilohertz.
2.2.6 Modèle du moteur :[3]
Le rôle du modèle du moteur est de fournir l'estimation du £lux statorique, du couple et
de la vitesse de rotation.
Le flux satonque est calculé a partir des tensions et des courants statoriques.
Le vecteur tension statorique peut se déduire de la mesure de la tension continue E à
l'entrée de I'onduIeur et des relations établies par l'état fermé ou ouvert des
interrupteurs de celui-ci. Le vecteur courant statorique se calcule à partir de la mesure de
deux des courants à l'entrée du moteur.
Les projections sur le repère (d,q) de l'équation des tensions du stator est :
Avec :
donnent par intégration les deux composantes du vecteur flux statorique donc son
module et sa position angulaire.
La résistance Rs est mesurée lors de la mise en service; sa valeur qui dépend de la
température est modifiée en fonction de la température du moteur.
En déterminant Vd et Vq à partir de la mesure de deux des tensions Va et Vb aux bornes
du moteur on peut tenir compte de la chute de tension dans I'onduieur et des effets des
commutations.
Le couple est calculé par le produit vectoriel des vecteurs flux et courant statoriques
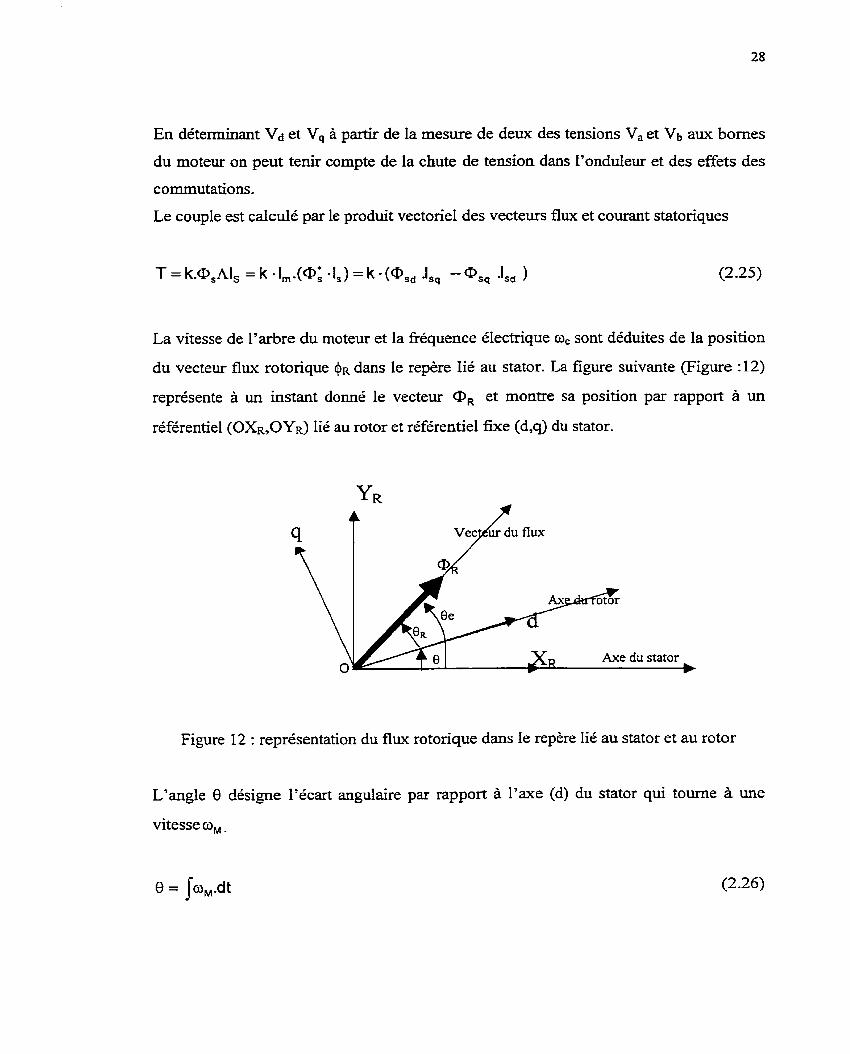
La vitesse de l'arbre du moteur et la fréquence électrique a, sont déduites de la position
du vecteur flux rotorique $R dans le repère lié au stator. La figure suivante (Figure : 1 2)
représente à un instant donné le vecteur a, et montre sa position par rapport à un
référentiel (OXR,OYR) lié au rotor et référentiel fixe (d,q) du stator.
Axe du stator F
Figure 12 : représentation du flux rotorique dans le repère lié au stator et au rotor
L'angle 0 désigne l'écart angulaire par rapport à l'axe (d) du stator qui tourne à une
vitesse o, .
l'angle 0, représente l'écart du flux par rapport à l'axe du rotor. puisque le flux tourne à
la vitesse wR par rapport au rotor.
Le flux fait un angle égal à, 8 + O,, avec l'axe du stator. Sa vitesse par rapport à celui ci
est :
On déduit : Q>, et OR, .
D'où
La vitesse mécanique du rotor est estimée à l'aide de la relation :
CHAPITRE 3
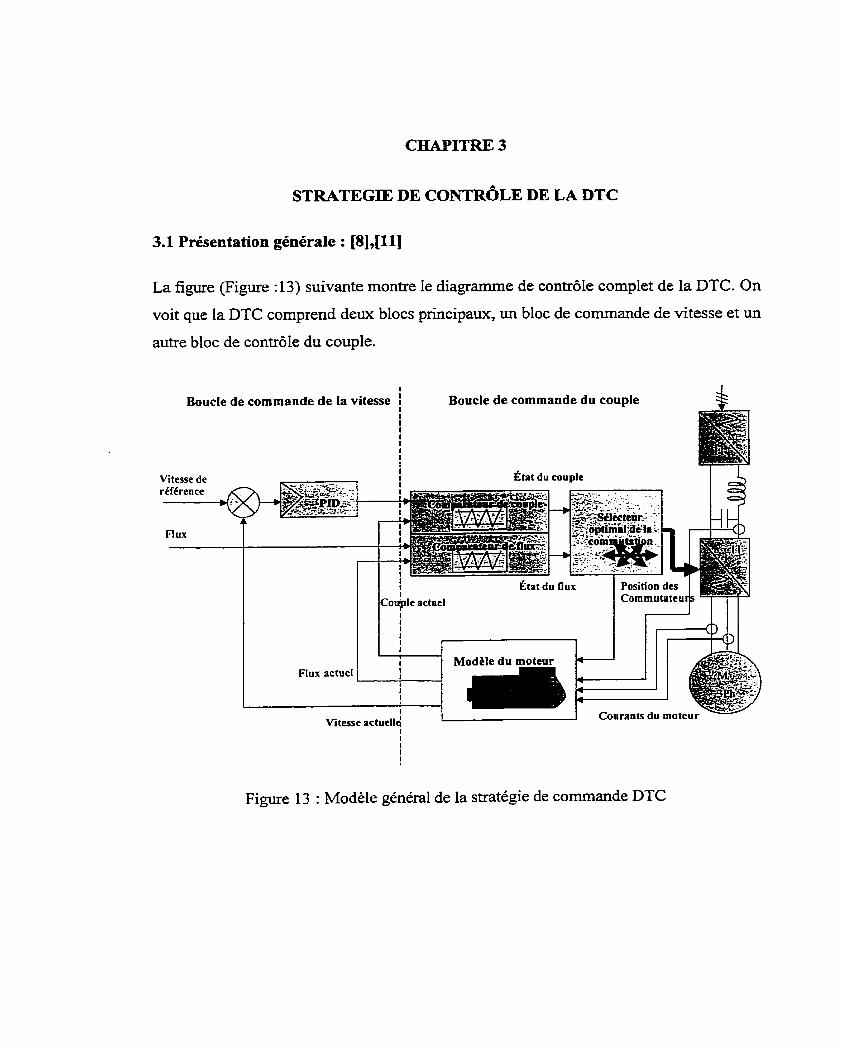
3.1 Présentation générale : [8],[11]
La figure (Figure : 13) suivante montre le diagramme de contrôle complet de la DTC. On
voit que la DTC comprend deux blocs principaux, un bloc de commande de vitesse et un
autre bloc de contrôle du couple.
I
Boucle de commande de la vitesse j
Vitesse de reference
Flux
Flux actuel
Boucle de commande du coupIe
Vitesse actuelld Courants du moteur
Figure 13 : Modèle général de la stratégie de commande DTC
3.2 Boucle de commande du couple :
Cette partie du diagramme comprend :
- les capteurs de courant et l'état des commutateurs :
Transmettent au modèle du moteur la tension d'alimentation DC du convertisseur, ainsi
que les courants des phases du stator, et l'état des interrupteurs du convertisseur.
- le modèle du moteur :
Les mesures précédentes sont injectées dans le modèle du moteur, le traitement de ces
données au niveau du modèle permet d'obtenir le flux et le couple actuel du moteur,
ainsi que Ia vitesse actuelle du moteur.
- le comparateur du couple et du flux :
L'information délivrée pour contrôler les interrupteurs de puissance est traitée dans les
comparateurs, le rôle des comparateurs est de comparer le signal du flux et du couple
aux valeurs imposées sur l'hystérésis et délivrer par la suite un signal de comparaison
qui sera traité dans le module sélecteur optimal de la commutation.
- Le sélecteur optimal de la coxnxnutation :
Dans ce module il y a une table contenant la logique de commutation du convertisseur,
en pratique la programmation de la logique de cette table se fait à l'aide d'un DSP
(Digital Signal Processor).
3.3 Boucle de commande de la vitesse :
Cette partie du diagramme comprend un contrôleur de vitesse, qui consiste en un
comparateur entre vitesse de consigne et vitesse réelle qui injecte l'erreur dans un P D
qui à son tour transmet une référence au contrôleur du couple .

CHAPITRE 4
MODELISATION ET MISE EN OEUVRE
4.1 Présentation du modèle de simulation de la stratégie de commande DTC :
La figure suivante (Figure :14 ), montre le modèle de simulation final correspondant à la
stratégie de contrôle synthétisée de la théorie de mise en œuvre de la commande DTC.
Figure 14 : Modèle de commande adopté
La synthèse et la modélisation de ce modèle, sera développée pour chaque bloc tout en
présentant :
- Le graphique du bloc.
- L'interface d'injection des paramètres dans le modèle.
- Les schémas blocs qui ont servi à la constitution du modèle.
- Un aperçu sur la logique de conception du modèle.
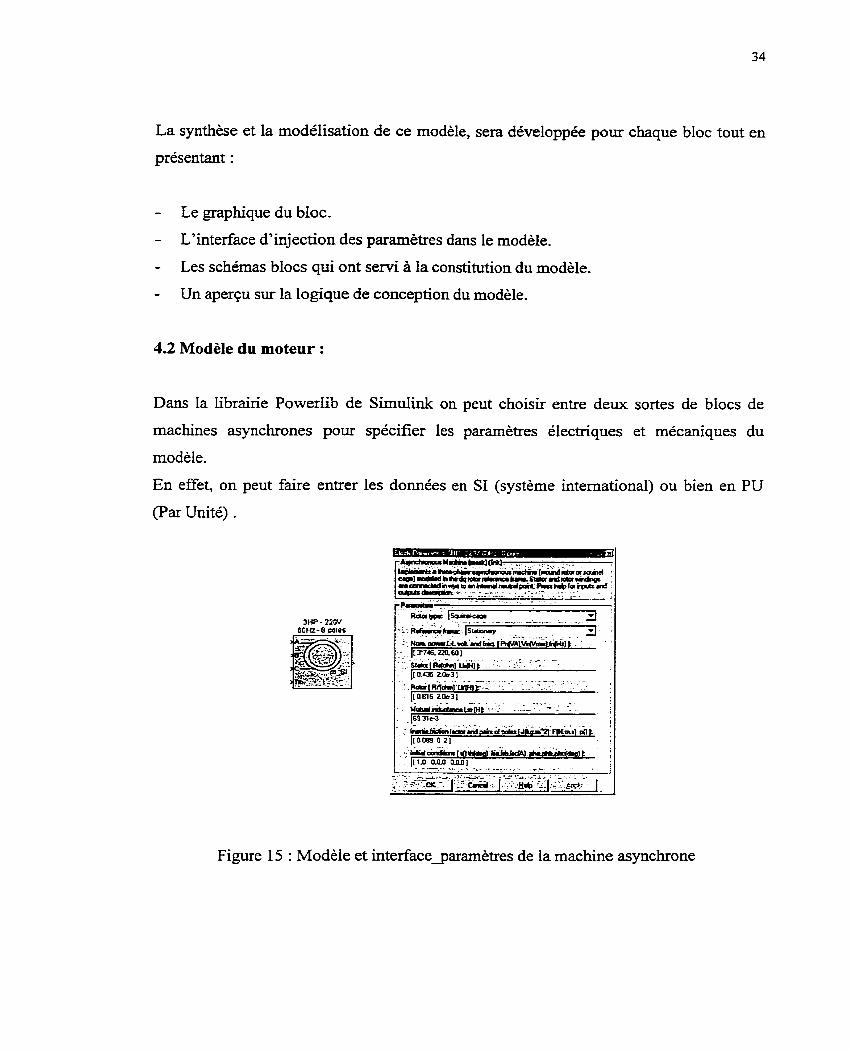
4.2 Modèle du moteur :
Dans la librairie Powerlib de Simulink on peut choisir entre deux sortes de blocs de
machines asynchrones pour spécifier les paramètres électriques et mécaniques du
modèle.
En effet, on peut faire entrer les données en SI (système international) ou bien en PU
(Par Unité) .
Figure 15 : Modèle et interfacejaramètres de la machine asynchrone
l'interface graphique des paramètres du moteur permet d'injecter les paramètres du
moteur à leurs emplacements correspondants
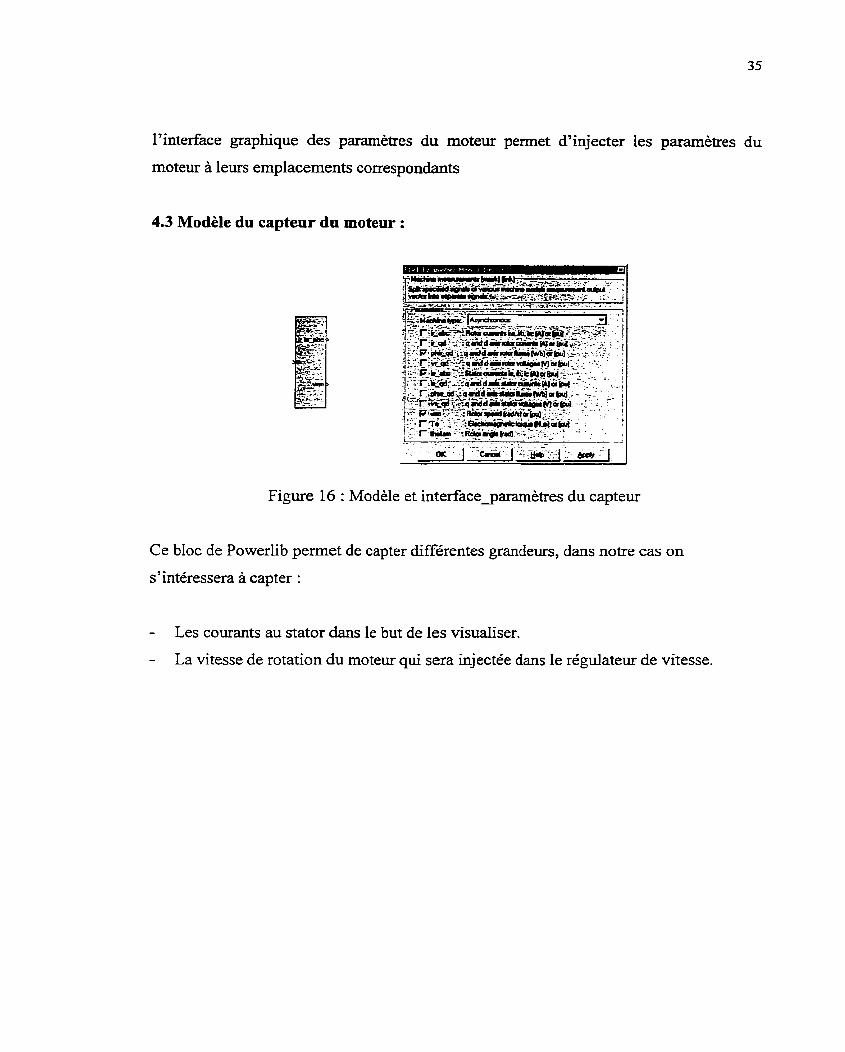
4.3 Modèle du capteur du moteur :
Figure 16 : Modèle et interfaceqaramètres du capteur
Ce bloc de Powerlib permet de capter différentes grandeurs, dans notre cas on
s'intéressera à capter :
- Les courants au stator dans le but de les visualiser.
- La vitesse de rotation d u moteur qui sera injectée dans Ie régulateur de vitesse.
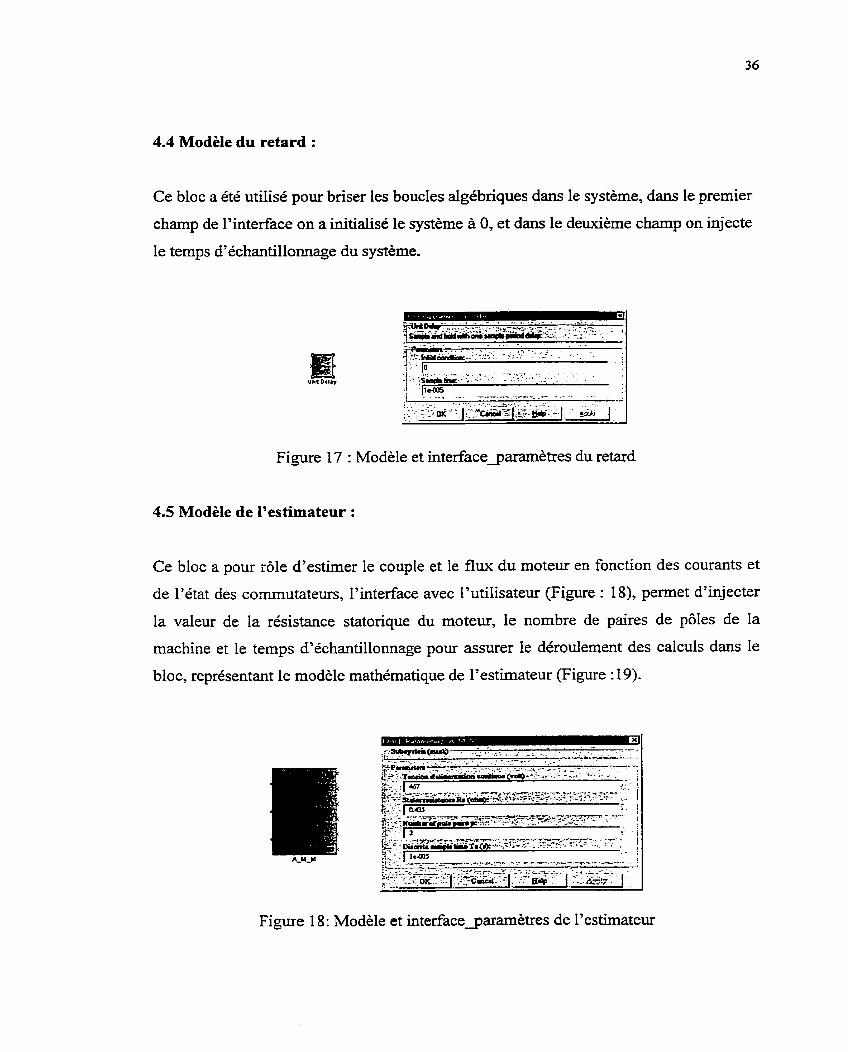
4.4 Modèle du retard :
Ce bloc a été utilisé pour briser les boucles algébriques dans le système, dans le premier
champ de l'interface on a initialisé le système à O, et dans le deuxième champ on injecte
le temps d'échantillonnage du système.
ULR Del-
Figure 17 : Modèle et interfaceqaramètres du retard
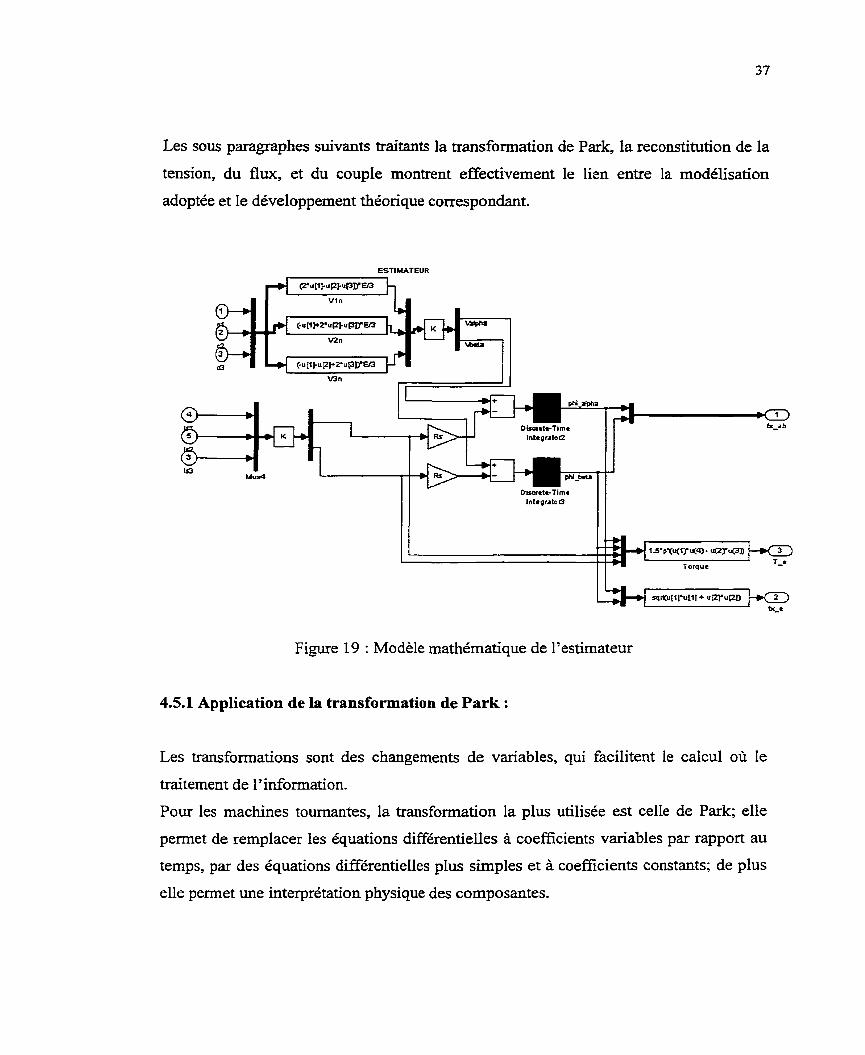
4.5 Modèle de I'estimateur :
Ce bloc a pour ïôle d'estimer le couple et le flux du moteur en fonction des courants et
de l'état des commutateurs, l'interface avec l'utilisateur (Figure : 1 S), permet d'injecter
la valeur de la résistance statorique du moteur, le nombre de paires de pôles de la
machine et le temps d'échantillonnage pour assurer le déroulement des calculs dans le
bloc, représentant le modèle mathématique de l'estimateur (Figure : 19).
Figure 18: Modèle et interfaceqaramètres de l'estimateur
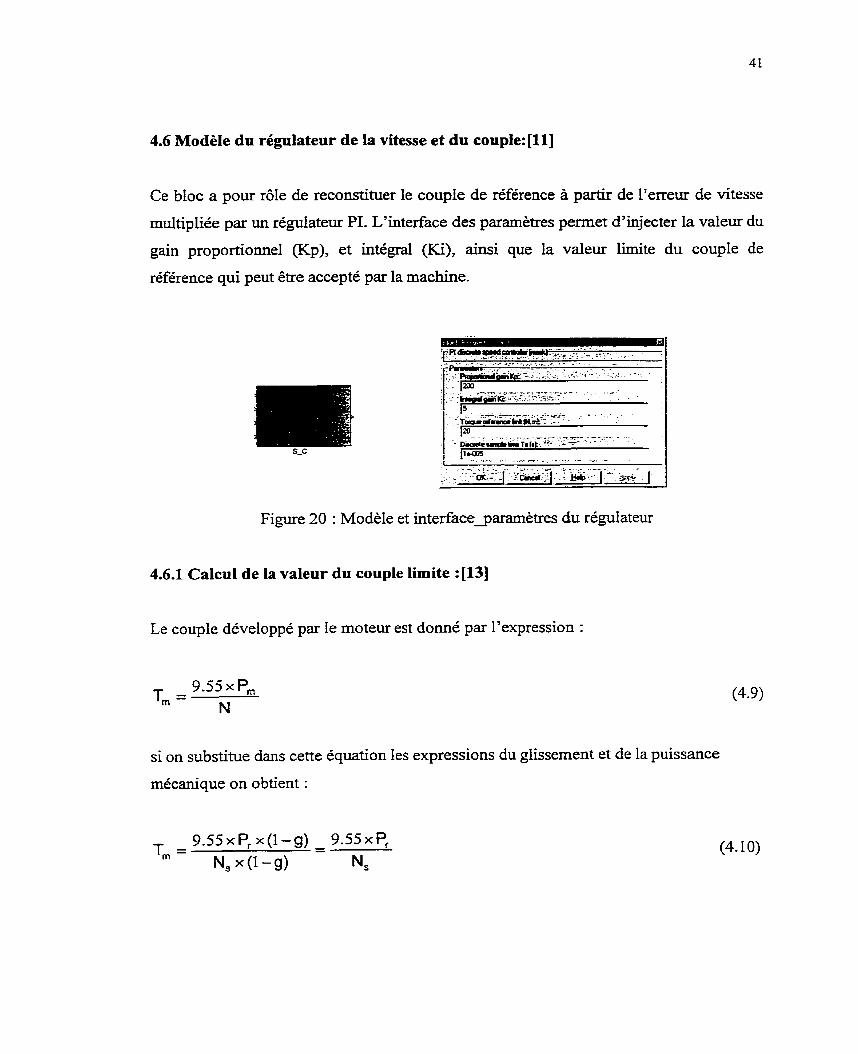
Les sous paragraphes suivants traitants la transformation de Park, la reconstitution de la
tension, du flux, et du couple montrent effectivement le lien entre Ia modélisation
adoptée et le développement théorique correspondant.
Figure 19 : Modèle mathématique de I'estimateur
4.5.1 Application de la transformation de Park :
Les transformations sont des changements de variables, qui facilitent le calcul OU le
traitement de l'information,
Pour les machines tournantes, la transformation la plus utilisée est celle de Park; elle
permet de remplacer les équations différentielles à coefficients variables par rapport au
temps, par des équations différentielles plus simples et à coefficients constants; de plus
elle permet une interprétation physique des composantes.

Pour notre système de 3 tensions Va, Vb ,V, , La transformation de Park d'angle a,
donne les composantes Vsd, Vrq ,Vso - Les deux systèmes sont Liés par :
Vsd : est la composante directe.
V,, : est la composante d'axe en quadrature.
Vso : est la composante homopolaire.
D'ordinaire pour ce système triphase, il n'y a pas de composantes homopolaires vu que
les neutres de la machine et du réseau ne sont pas connectés, aussi on doit fixer l'angle a
pour que les mutuelles inductances entre les enroulements statoriques et rotoriques
soient constantes.
Voici donc la transfomation finale pour un angle a = 0.
Remarque :
On applique la même transformation aux trois courants i,, ib, i, pour obtenir i,d et isq.

4.5.2 Reconstitution des tensions : [5]
La stratégie utilisée dans cet estimateur est de reconstituer les tensions du stator à partir
de l'état des commutateurs.
La tension phase neutre s'écrit pour les 3 tensions V, Vb, V, comme suit :
1 vb = - - (-E, + 2.E, - E,) 3
avec :
E,, Eb, Ec, sont des tensions continues appliquées awc: phases a,b,c+
Sachant que :
On obtient :
avec :
U(a),U(b),U(c), représentent l'état de conduction binaire du commutateur.

A partir de I'équation (4.3), on peut déterminer la tension crête maximum de
Va,Vb,etVc qui s'écrit sous la forme suivante :
d'où l'écriture suivante en fonction de la tension efficace nominale entre phase et neutre.
avec :
V, est la tension nominale entre phase et neutre.
4.5.3 Reconstitution du flux et du couple :[4],[19]
La reconstitution du flux et du couple est obtenue à l'aide de la formule suivante :
La reconstitution du couple s'écrit en fonction des courants et flux du repère d,q comme
suit :
4.6 Modèle du régulateur de la vitesse et du couple:[ll]
Ce bloc a pour rôle de reconstituer le couple de référence à partir de l'erreur de vitesse
multipliée par un régulateur PI. L'interface des paramètres permet d'injecter la valeur du
gain proportionnel (Kp), et intégral (Ki), ainsi que la valeur limite du couple de
référence qui peut être accepté par la machine.
Figure 20 : Modèle et interfaccqaramètres du régulateur
4.6.1 Calcul de la valeur du couple limite : [13]
Le couple développé par le moteur est donné par l'expression :
si on substitue dans cette équation les expressions du glissement et de la puissance
mécanique on obtient :

avec :
Tm : Couple développé par le moteur p.m].
Pm :Puissance mécanique m. Pr : Puissance transmise au rotor CW].
N : Vitesse de rotation du rotor [tr/min]-
N, : Vitesse synchrone, en tours par minute [tr/min]
30 935: facteur tenant compte des unités. Sa valeur exacte est : -.
7r
g : Glissement.
On suppose que le couple limite que la machine ne peut pas dépasser est de l'ordre de :
avec :
K = 11.--21.
T,,, :Couple limite.
Pour effectuer LUI calcul grossier approximatif pour déterminer la valeur du couple
limite, en effet, on peut égaliser la puissance transmise au rotor avec la puissance
nominale fournie au stator et négliger les pertes joules statoriques et les pertes fer.
4.6.2 Présentation des deux types de commande :
Le modèle mathématique du régulateur est conqu de telle façon qu'on peut choisir entre
une référence de vitesse et une référence de couple.
La figure suivante (Figure : 21) schématise le modèle mathématique du régulateur PI qui
nous donne deux choix possibles pour la commande du couple, soit par le biais du
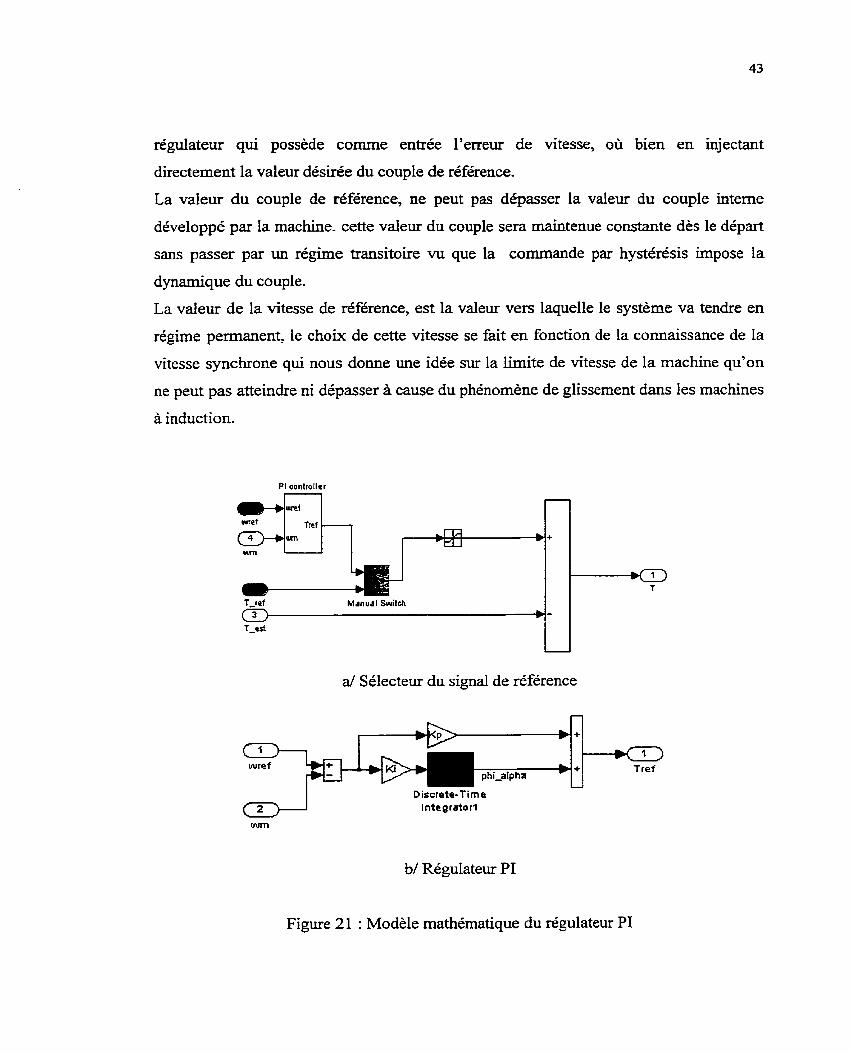
réguiateur qui possède comme entrée l'erreur de vitesse, où bien en injectant
directement la valeur désirée du couple de référence.
La valeur du couple de référence, ne peut pas dépasser la valeur du couple interne
développé par la machine. cette valeur du couple sera maintenue constante dès le départ
sans passer par un régime transitoire vu que la commande par hystérésis impose la
dynamique du couple.
La valeur de la vitesse de référence, est la valeur vers laquelle le système va tendre en
régime permanent, le choix de cette vitesse se fait en fonction de la connaissance de la
vitesse synchrone qui nous donne une idée sur la limite de vitesse de la machine qu'on
ne peut pas atteindre ni dépasser à cause du phénomène de glissement dans les machines
à induction.
PI controller
471
a/ Sélecteur du signal de référence
nhi aiaha Tref
Discrete-Time I nte g rato r l
b/ Régulateur PI
Figure 2 1 : Modèle mathématique du régulateur PI

La vitesse synchrone est donnée par la forrm.de s-uivanEe :
4 - f -7c 120*f (tr/min) =- Ns =(2.p) (2 - P) (rad / sec)
avec :
f : Fréquence du réseau electrique.
p :Nombre de paires pôles.
N, : Vitesse synchrone.
Le choix de la consigne est fonction de la nature de I'application qu'on va effectuer, qui
va demander soit une commande de couple, soit une commande de vitesse.
4.7 Modèle du sélecteur optimal de la commutation :
Ce bloc a pour rôle de détecter la position angulaire et de générer la commande adéquate
en fonction de l'état du flux et du couple.
L'interface des paramètres de ce bloc permet d'injecter la valeur de l'hystérésis de
couple et du flux, tolérables.
Figure 22 : Modèle et interfaceqarsmètres de 170PS
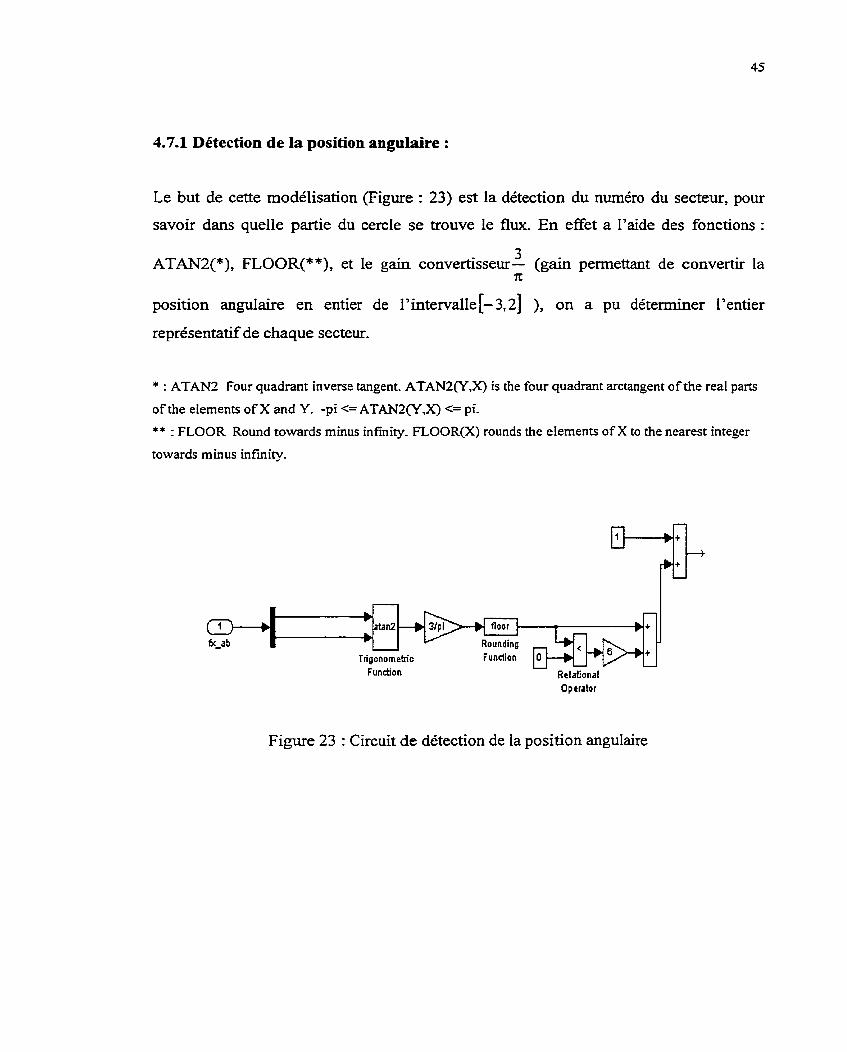
4.7.1 Détection de la position angulaire :
Le but de cette modélisation (Figure : 23) est la détection du numéro du secteur, pour
savoir dans
ATAN2 (* ),
quelle partie du cercIe se trouve le flux. En effet a l'aide des fonctions :
FLOOR(**), et le gain convertisseurL (gain permettant de convertir la i*
position angulaire en entier de l'intervalle[-3,2] ), on a pu déterminer l'entier
représentatif de chaque secteur.
* : ATAN2 Four quadrant inverse tangent. ATAN2(Y,X) is the four quadrant arctangent of the real parts
of the elements of X and Y. -pi <= ATANZ(Y,X) <= pi.
** : FLOOR Round towards minus infinity. FLOOR(X) rounds the elernents of X to the nearest integer
towards minus infmity.
Trigonometric Fundion Relational
Operator
Figure 23 : Circuit de détection de la position mgdaire
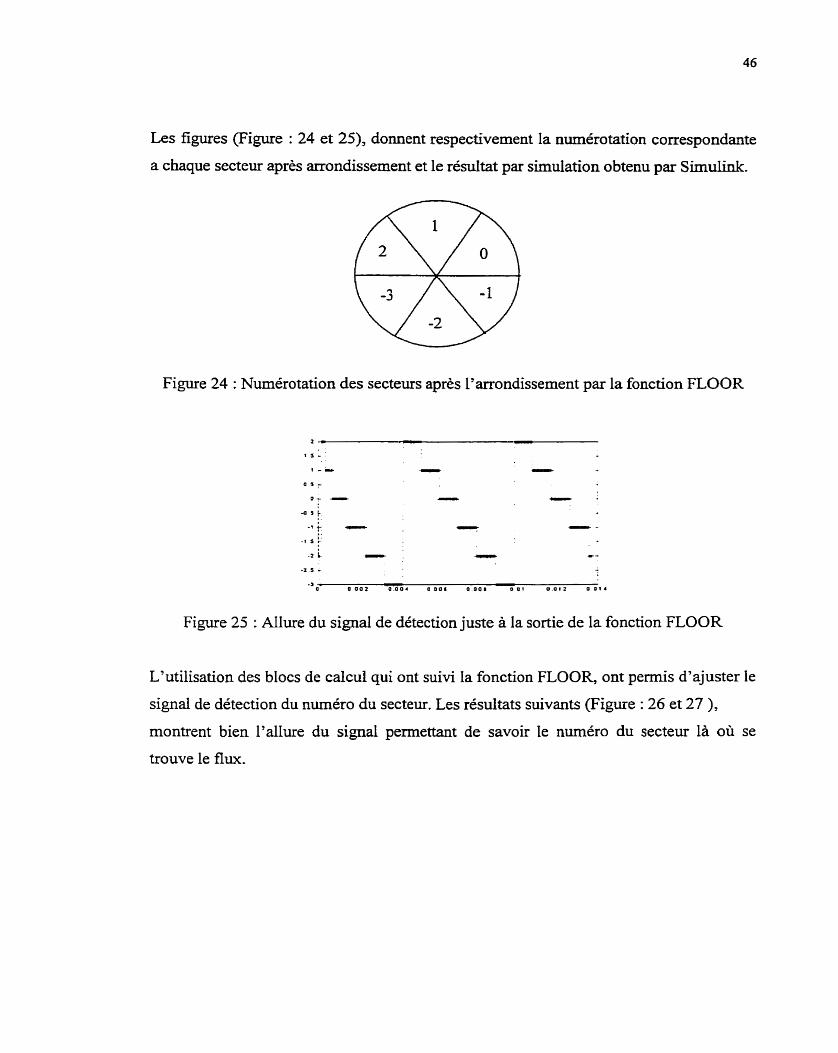
Les figures (Figure : 24 et 25), donnent respectivement la numérotation correspondante
a chaque secteur après arrondissement et le résultat par simulation obtenu par Simulink.
Figure 24 : Numérotation des secteurs après L'arrondissement par la fonction FLOOR
3 r O 0 O 0 2 0 0 0 4 O 0 0 6 O O O l 0 0 1 O O l t O O T 4
Figure 25 : Allure du signal de détection juste à la sortie de la fonction FLOOR
L'utilisation des blocs de calcul qui ont suivi la fonction FLOOR, ont permis d'ajuster le
signal de détection du numéro du secteur. Les résultats suivants (Figure : 26 et 27 ),
montrent bien l'allure du signal permettant de savoir le numéro du secteur là où se
trouve le flux.
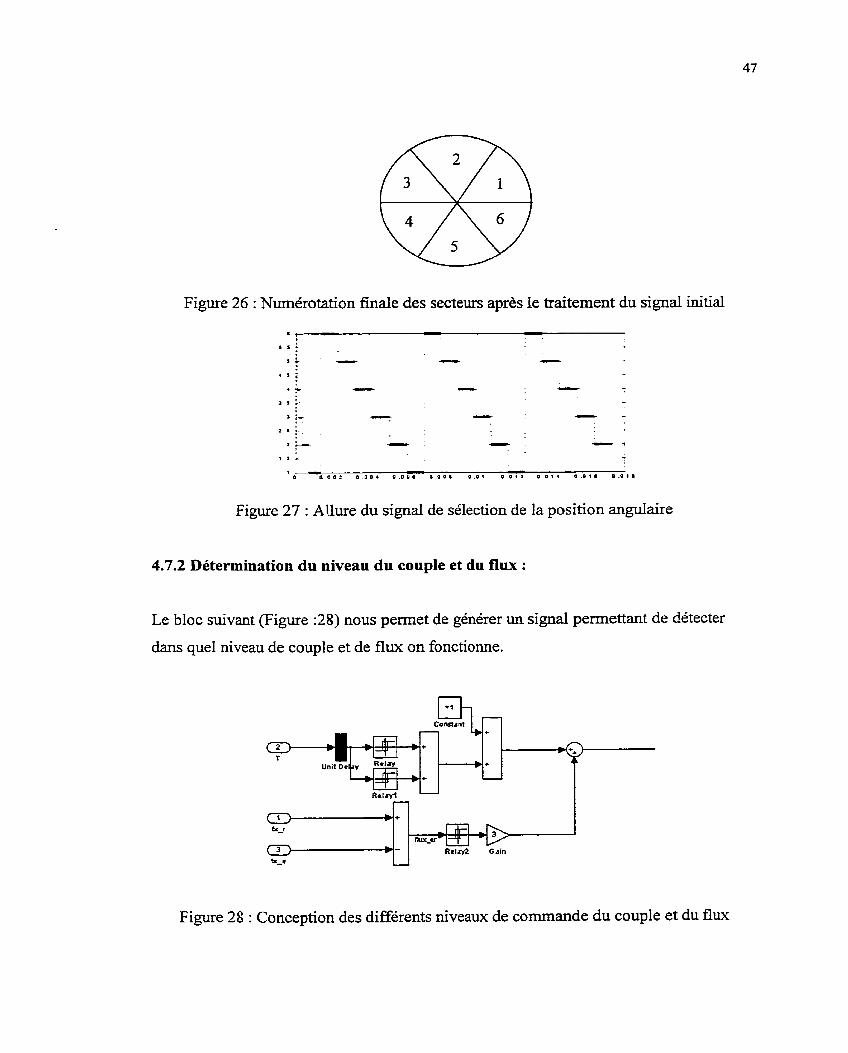
Figure 26 : Numérotation hale des secteurs après le traitement du signal initial
I I -
I O O 0 0 2 O O 0 4 O . 0 O I 0 0 0 ) 0 . 0 1 0 O ( = 0 0 1 . 0 0 1 . 0 0 , .
Figure 27 : A!lure du signai de sélection de la position angulaire
4.7.2 Détermination du niveau du couple et du flux :
Le bloc suivant (Figure :28) nous permet de générer un signal permettant de détecter
dans quel niveau de couple et de flux on fonctionne.
Figure 28 : Conception des différents niveaux de commande du couple et du flux
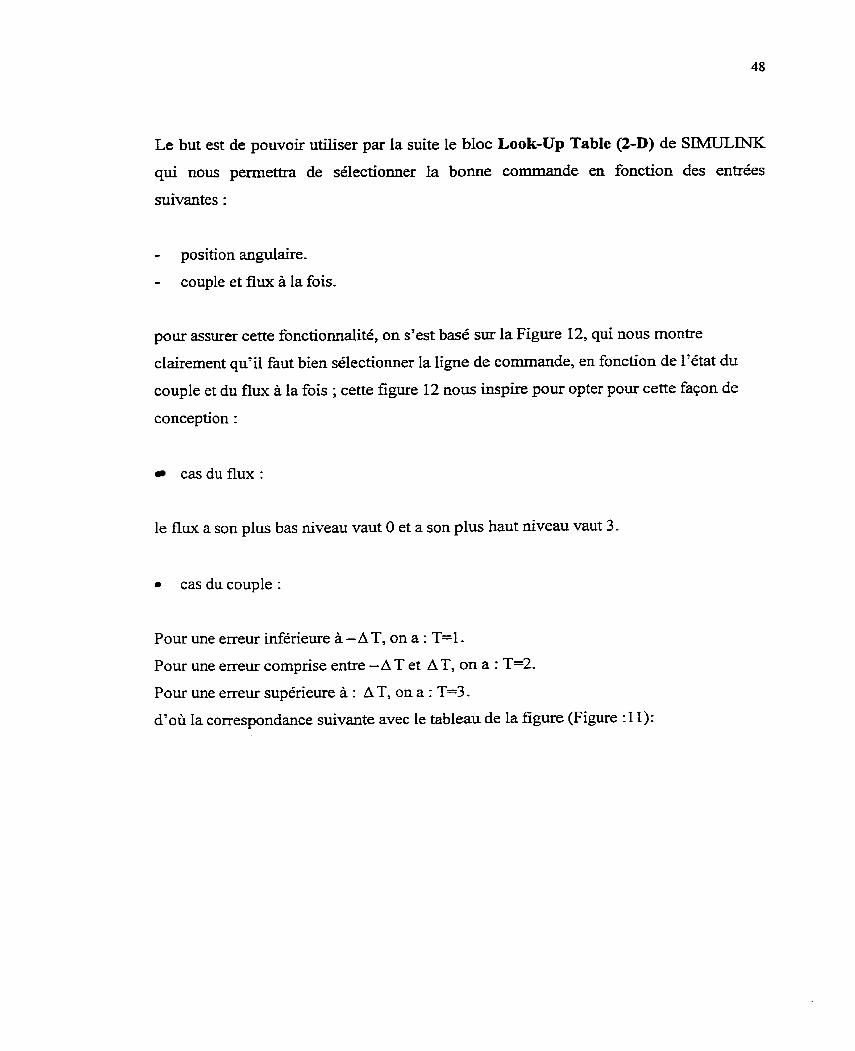
Le but est de pouvoir utiliser par la suite le bloc Look-Up Table (2-D) de SIMLLINK
qui nous permettra de sélectionner la b o ~ e commande en fonction des entrées
suivantes :
- position angulaire.
- couple et flux à la fois.
pour assurer cette fonctionnalité, on s'est basé sur la Figure 12, qui nous montre
clairement qu'il faut bien sélectionner la ligne de commande, en fonction de l'état du
couple et du flux à la fois ; cette figure 12 nous inspire pour opter pour cette façon de
conception :
cas du flux :
le flux a son plus bas niveau vaut O et a son plus haut niveau vaut 3.
cas du couple :
Pour une erreur inférieure à -A T, on a : T=l .
Pour une erreur comprise entre - A T et A T, on a : T=2.
Pour une erreur supérieure à : A T, on a : T=3.
d'où la correspondance suivante avec le tableau de la figure (Figure : 1 1):
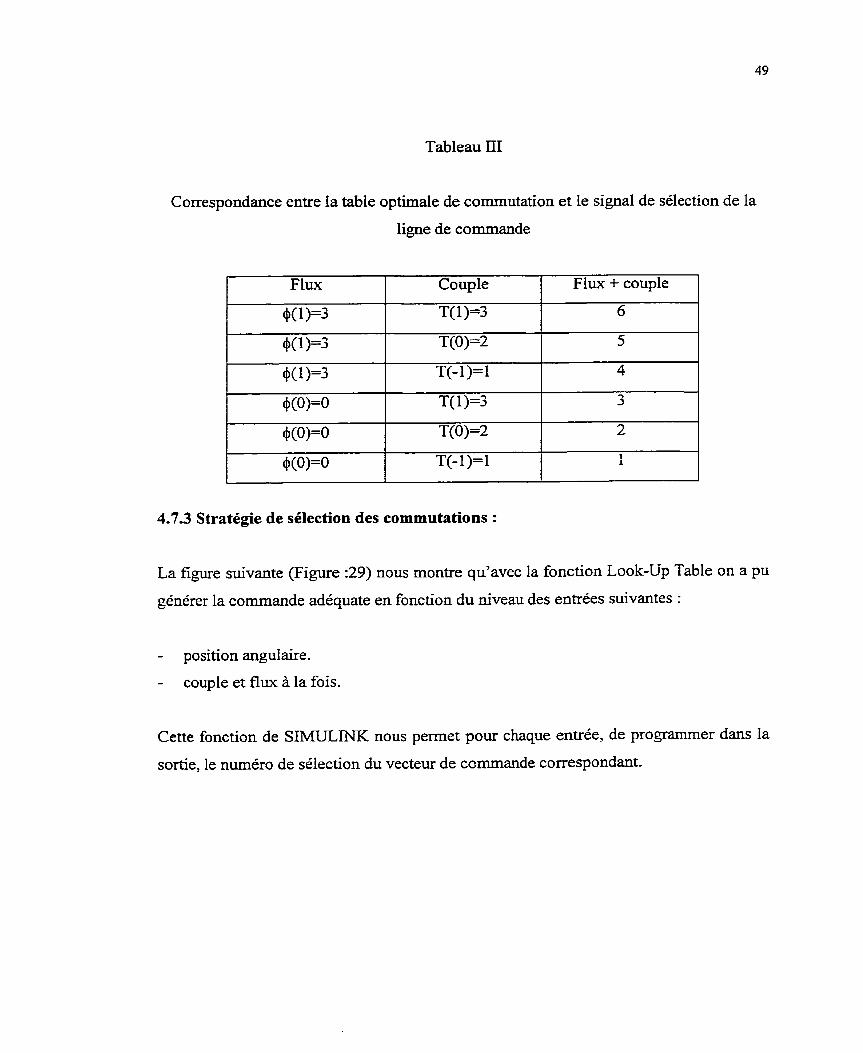
Tableau III
Correspondance entre la table optimale de commutation et le signal de sélection de la
ligne de commande
4.7.3 Stratégie de sélection des commutations :
La figure suivante (Figure :29) nous montre qu'avec la fonction Look-Up Table on a pu
générer la commande adéquate en fonction du niveau des entrées suivantes :
Flux + couple Flux
- position angulaire.
- couple et flux à la fois.
Couple
Cette fonction de SIMULINK nous permet pour chaque entrée, de programmer dans la
sortie, le numéro de sélection du vecteur de commande correspondant.
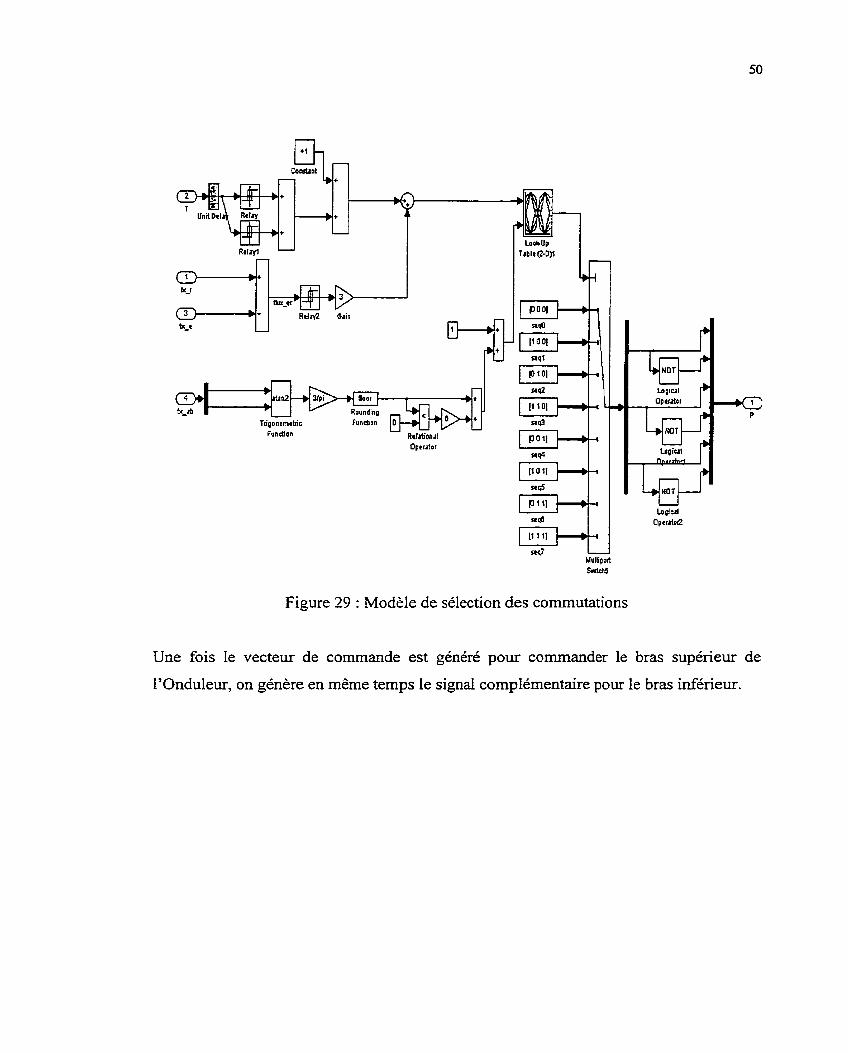
Figure 29 : Modèle de sélection des commutations
Une fois le vecteur de commande est généré pour commander le bras supérieur de
l'Onduleur, on génère en même temps le signal complémentaire pour le bras inférieur.

4.8 ModèIe du pont convertisseur MOSFET : [12]
L'interrupteur MOSFET est muni d'un circuit d'aide à la commutation pour le protéger
contre les changements de tensions élevées pendant son ouverture. Le circuit est
composé d'un condensateur Cs et d'une résistance Rs, L'injection de ces paramètres se
fait dans l'interfaceqarametres du convertisseur MOSFET suivante :
-drmLFnmit - um-Amyliddr*.mddbrtb 1-:. .- \. - . - - - . f ' - . - .- - -.y., - -. . -- p=- *- v
-1 * d + w 13 - - - - . - .i; -p-& .IAEC=IUU- . -- - - r - - , - 3 : .F.~'&hDO) - . . . _ - * . - - - ,
hm
Figure 30 : Modèle et interfacejarmètres du pont convertisseur MOSFET
Le bloc du MOSFET, contient une capacité et une résistance d'amortissement (Snubber)
en série appelés Cs et Rs qui sont usuellement connectés en parallèles avec le transistor.
On peut mettre un circuit d'amortissement purement résistif (Cs*, ou bien purement
capacitif (Rs=O); on peut aussi éliminer ce circuit en mettant (Rs=inf où Cs=O).
Les formules suivantes permettent d'avoir une idée sur les valeurs approximatives de la
résistance et de la capacité d'amortissement :
avec :
la, : Est la valeur efficace de la valeur fondamentale du courant de ligne.
V, : Est la tension efficace entre lignes
4.9 Modèle du capteur de courants:
Ce bloc a été conçu pour capter les courants pour 3 phases du stator et de les injecter
dans le modèle du moteur.
Figure 3 1 : Modèle du capteur de courants
La figure suivante (Figure :3 2) montre la conception interne de ce capteur.
Figure 32 : Conception interne du modèle du capteur de courants

CHAPITRE 5
ETUDE DE CAS ET RESULTATS
5.1 Calcul des paramètres à injecter dans Ie modèle de la DTC :
5.1.1 Paramètres du moteur à commander :[18]
Puissance : P, = 3HP = 2.238 kW-
Tension eEcace phase-neutre : V, = 220 V.
Fréquence d'alimentation : f = 60Hz.
Nombre de paires de pôles : p = 2 (4 pôles).
Résistance du stator : RS = 0.435 Ohm/phase-
Moment d'inertie : J = 0.089 kg.m2.
5.1.2 Caractéristiques des moteurs à cage d'écureuil :[13]
Le Tableau IV, donne les caractéristiques électriques moyennes des moteurs
asynchrones a cage d'écureuil dans la gamme des puissances comprises entre 1KW et
10KW.
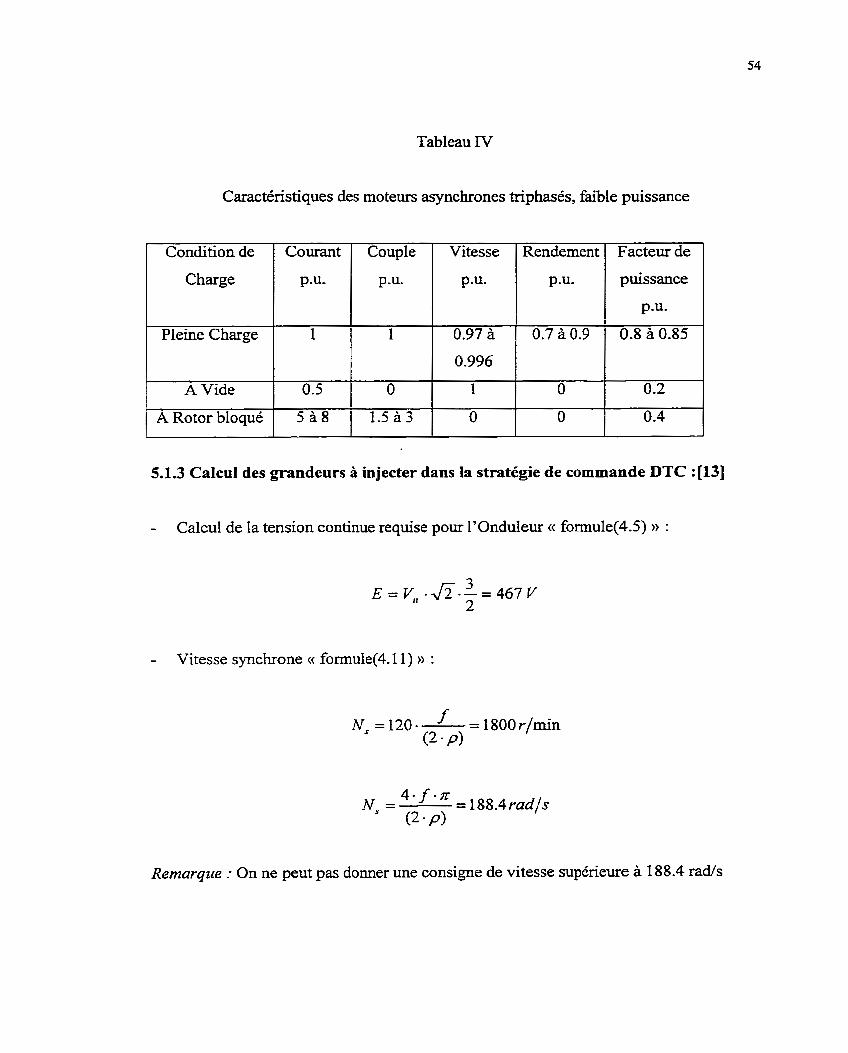
Tableau N
Caractéristiques des moteurs asynchrones triphasés, faible puissance
5.1.3 Calcul des grandeurs a injecter dans la stratégie de commande DTC :[13]
- Calcul de la tension continue requise pour lYOnduleur « formule(4.5) » :
Facteur de
puissance
PSI*
0.8 à 0.85
0.2
O -4
- Vitesse synchrone « formule(4.11) » :
Rendement
p-u.
0.7 à 0.9
O
O
Remarque : On ne peut pas donner une consigne de vitesse supérieure a 188.4 rad/s
Vitesse
P.U.
0.97 à
0.996
I
O
Couple
p-u.
1
Condition de
Charge
Pleine Charge
Courant
p.u-
1
O
1.5 à 3
A Vide
A Rotor bloqué
0.5
5 à 8

- Couple développé par le moteur Tm « formule(4.9) » :
Remarque : on ne peut pas donner une consigne de couple supérieure à la valeur de
couple développé par la machine
A rotor bloqué la machine asynchrone va absorber le maximum de courants. Le calcul
de ce courant nous permettra de dimensiorner les composantes & et Cs du circuit
amortisseur (Snubber); en se basant sur les résultats du tableau 4, on peut tirer les
calculs suivants :
- Courant de pleine charge :
avec COS(^) = 0.8
- Courant a rotor bloqué :
I n x 8 =6OA
- Calcul de la capacité d'amortissement « fomule(4. t 3) D:

- Calcul de la résistance d' amortissement formule(4.14) » :
5.2 Interprétation des résultats de la simulation :
5-2.1 Commande avec Consigne de vitesse : [2] (Voir annexe : Résultats de la simulation pour une consigne de vitesse)
L'équation différentielle qui régit le fonctionnement mécanique du rotor s'écrit sous la
forme suivante :
Avec,
T :est le couple généré.
TR : est le couple résistant.
f : coeff~cient de frottement.
o : vitesse de rotation-
J : moment d'inertie.
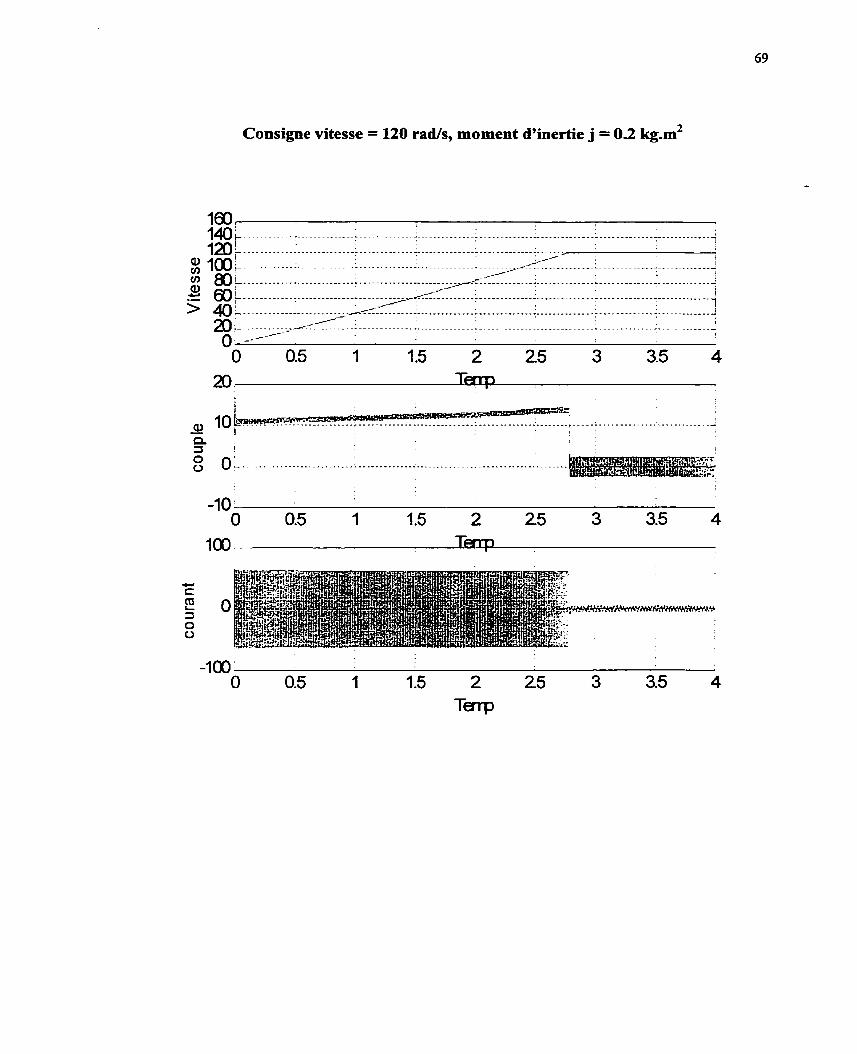
On voit très bien qu'en régime transitoire le couple est important et subit une variation
do en fonction du temps vu que le terme Je- n'est pas nul; en régime permanent
d t
do J - - = 0 et le couple va égaliser le couple résistant et le couple de fkottement, ce qui
dt
explique bien la chute du couple en régime permanent.
Vu le couple important que génère la machine au départ pour atteindre le régime
permanent, le moteur fait une importante demande de courant électrique pendant ce
régime transitoire, ce qui explique bien l'allure de la courbe de courant qui montre une
forte absorption de courant en régime transitoire.
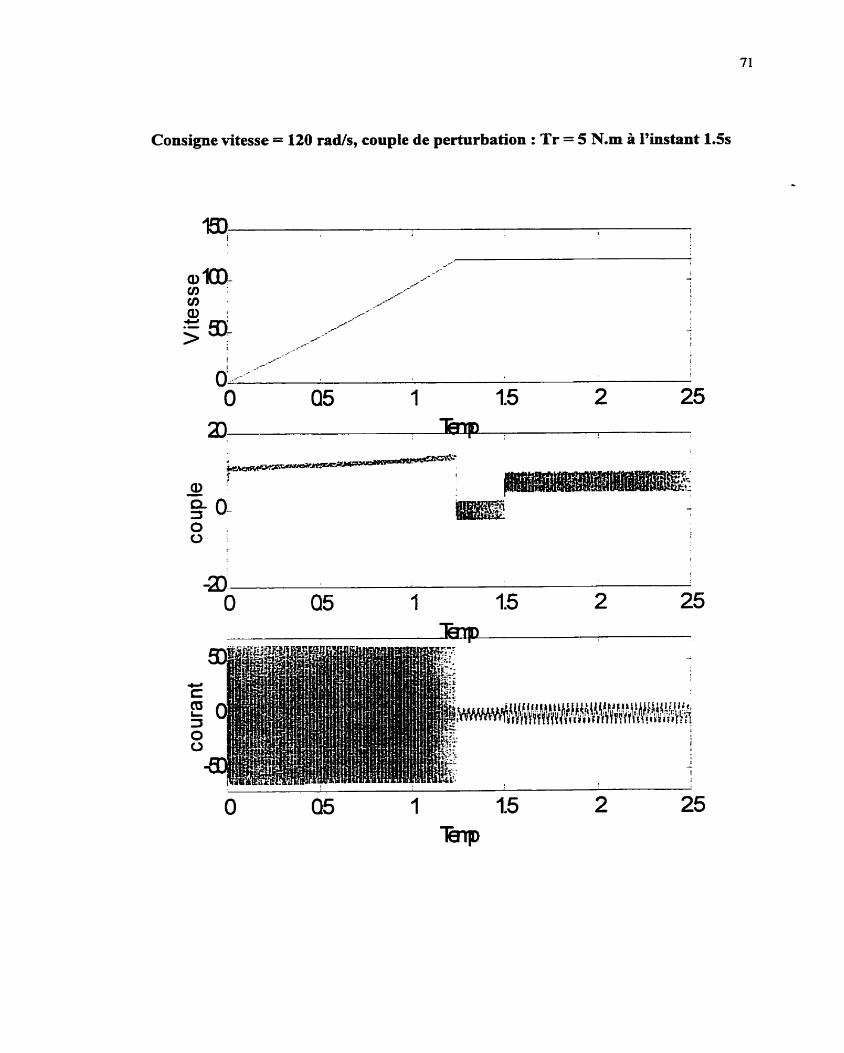
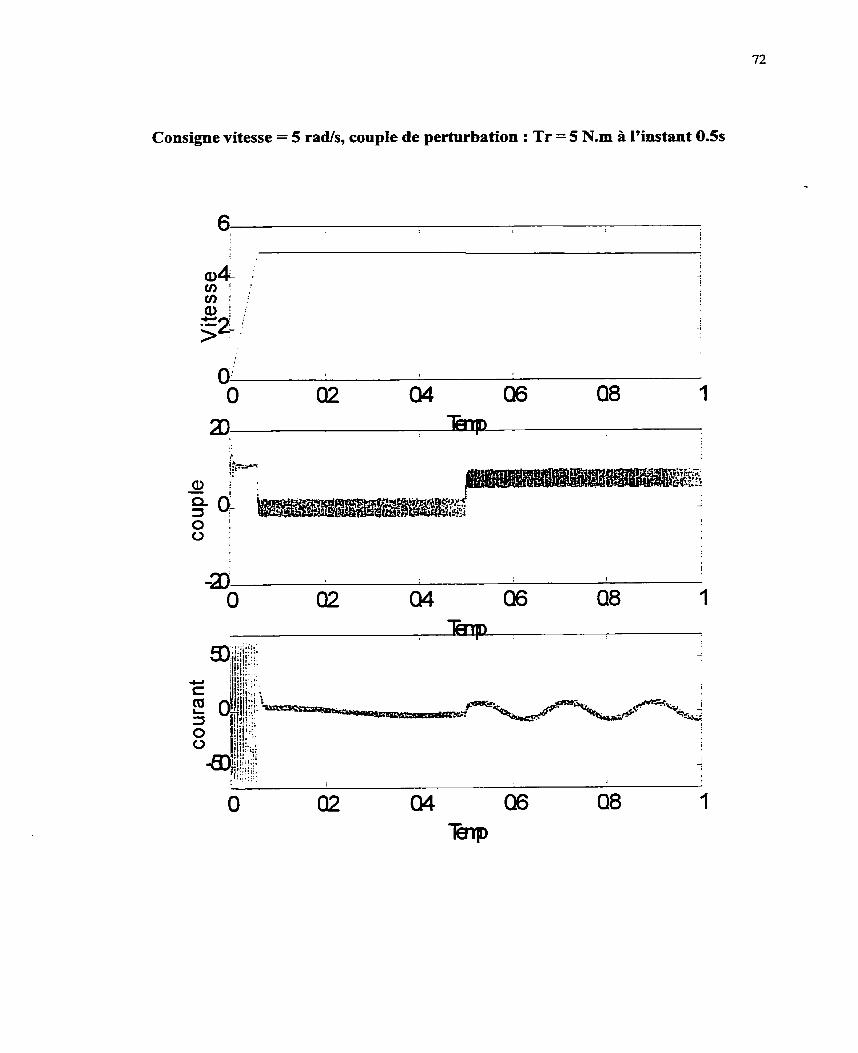
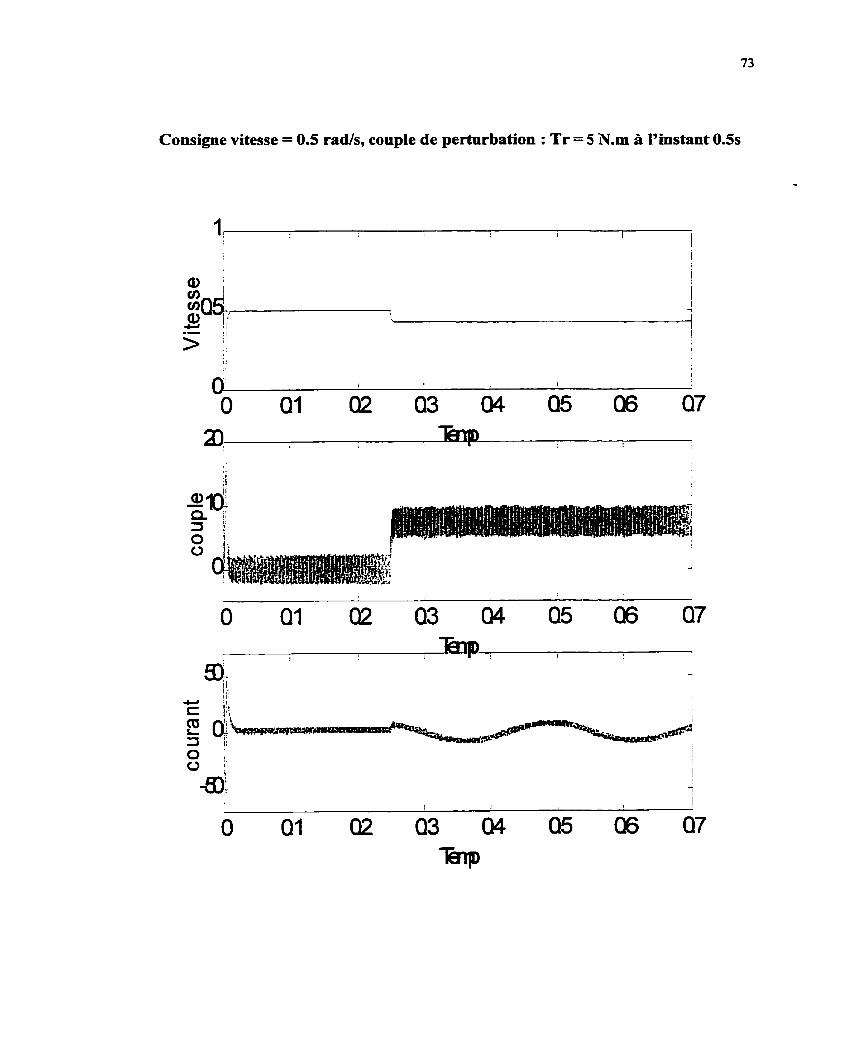
La variation de la vitesse en régime transitoire et permanent n'influe pas sur la
régulation du couple qui demeure constant malgré les perturbations
5.2.1.2 Calcul des temps de démarrage pour différentes situations : [2]
le temps t, nécessaire pour amener l'ensemble moteur charge de l'arrêt @=O), jusqu'à
sa vitesse nominale (a = aN) , se déduit directement des caractéristiques couple vitesse.
Puisque :
Remarque :
Pour simplifier les calculs on suppose que le fiottement visqueux est nul.
On tire donc :
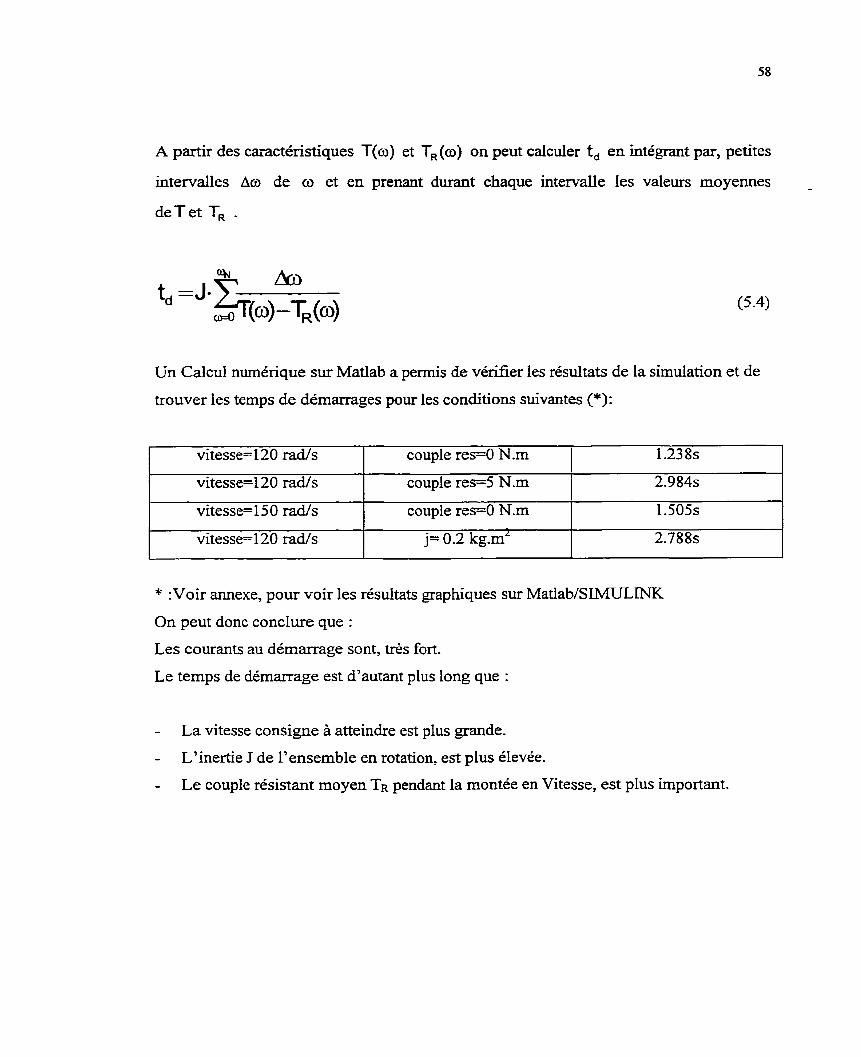
A partir des caictéristiques T(o) et TR (a) on peut calculer t, en intégrant par, petites
intervalles Am de o et en prenant durant chaque intervalle les valeurs moyennes
deT et TR .
Un Calcul numérique sur Matlab a permis de vérifier les résultats de la simulation et de
trouver les temps de démarrages pour les conditions suivantes (*):
vitesse=120 rads
vitesse=120 radk
I I
1 vitesse=120 r ads j= 0.2 kg.mL 2.788s 1
couple res=O N.m
vitesse=l50 rads
* :Voir annexe, pour voir les résultats graphiques sur Matlab/SIMULINK
On peut donc conclure que :
Les courants au démarrage sont, très fort.
Le temps de démarrage est d'autant plus long que :
1.23 8s
couple res=5 N.m
- La vitesse consigne à atteindre est plus grande.
- L3inertÏe J de l'ensemble en rotation, est plus élevée.
- Le couple résistant moyen TR pendant la montée en Vitesse, est plus important.
2.984s
couple res=0 N.m 1.505s
5.2.2 Commande avec Consigne de couple :
(Voir annexe : Résultats de la simulation pour une consigne de couple)
On voit très bien que la commande arrive à maintenir le couple constant sans aucun
régime transitoire, vu que le couple n'a aucune dynamique interne-
Théoriquement la vitesse va augmenter héairement jusqu'à égaliser le frottement
visqueux et le couple résistant.
Mais en pratique cette vitesse va être Limitée par les frottements visqueux les couples
résistants s'il y en a et les limites mécaniques de la machine.
Les résultats de la sindation ont montré que si on charge la machine commandée en
couple, on fait diminuer l'augmentation de la vitesse en fonction du temps. Sans
influencer la valeur du couple désiré qui va suivre tout le temps le couple de référence.
5.3 Conclusion générale :
Le modèle de simulation a pu donner des résultats très intéressants, et a prouvé
l'efficacité de cette stratégie d'entraînement.
Moyennant les résultats de la simulation on peut conclure que cette stratégie
d'entraînement permet de commander la vitesse ou le couple à partir de très basses
vitesses jusqu'au régime de survitesse. La réponse à un changement de couple est
particulièrement rapide. Par conséquent, on peut maintenir une vitesse constante même
lorsque la charge impose des chocs mécaniques importants.
Notons que l'on peut commander le couple ou, la vitesse du moteur mais seulement une
des deux grandeurs à la fois. La relation entre ces deux grandeurs est en effet imposée
par la charge.
Une comparaison grossière a été effectuée entre les résultats de cette simulation, et les
résultats pratiques délivrés par un entraînement électrique de ABB(ACS6OO), entraînant
le même type de machines électriques; les résultats pratiques ont démontré que le
modèle de simulation donne des résultats très intéressants.

L'amélioration de ce modèle, va permettre une meilleure estimation des temps
d'accélération, en fonction de différentes charges, d'où la possibilité d'étdonner les
paramètres de l'entraînement électrique avant d'effectuer un test pratique.
La commande du couple par hystérésis peut être utilisée actuellement dans un grand
nombre d'applications industrielles ayant les caractéristiques couple-vitesse, des divers
types de charges suivantes :
1/ Un couple résistant proportionnel au carré de la vitesse :
- Les pompes centrifuges.
- Les compresseurs cenirikges. - Les ventilateurs et les soufflantes.
- Les pompes à vis et à hélice.
- Les centrifugeuses.
21 Un couple résistant proportionnel à la vitesse :
- Les presses. - Les calandres à frottements visqueux.
- Les freins à courants de Foucault.
- La plupart des machines outils.
31 Un couple résistant constant où variable :
- Les compresseurs et les pompes à pistons.
- Les engins de levage et de manutention.
- Les bandes transporteuses.
- Les broyeurs et concasseurs.
4/ Un couple résistant inversement proportionnel a la vitesse, ( ou une puissance
absorbée constante : P = T - o ):
- Les bobineuses.
- Les tours.
- Les dérouleuses à bois.
[II : Power System Blockset User's Guide', For Use with SIMULINK
[2] : Jean Bond, Entrainements électriques à vitesse variable, Vo~ume 1, Lavoisier,
1997
[3] : Jean Bond, Guy Séguier, Entrafnernents électriques à vitesse variable, Volume 2,
Lavoisier, 1998
[4] : Ion Boldea, S-A-NASAR, Electric Drives, CRC Press, 1999
[SI : Gérald B Kliman, <c Harmonic effects in pulse width rnodulated inverter induction
motor drives », IEEEAAS Annula Meeting, pp.126-133,1980
[6] : Pekka Tiitinen, Pasi Pohjalainen, Jarko Laiu, cc Direct torque control, DTC ».
proceedings EPE Chapter Symposium on Electric Drives Design and Applications,
Lausanne, October 1994
[7] : Isao Takahashi, Toshihiko Nogucki (1 986). « A new quick-response and
high - eficiency control strategy of cn induction motor » . IEEE Trans. Indusûy
Applications, Vo1.22, No.5, pp. 820-827, Sept. / Oct. 1986
[8] : Rewe ABB 3/1995. << Régulation directe du couple d 'entrai'nernents à courant
triphasé ».
[9] : Revue ABB 5/1997. « Intégration du système de contrôle commande advant OCS
et de systèmes d 'entrainements industriels ».
[IO] : Revue ABB 6/1997. ACS 600 cc Une famille de produits fondés sur DTC en pleine
évolution ».
[I l] : ABB training center. DTC Technical Guide .
[12] : Ned Mohan, Tore M.Undeland, William P.Robbins, Power electronics :
Converters. Applications and design , Edition Wiley, 1989
1131 : Théodore Wildi , Électrotechnique , Les presses de l'Université Laval, 1999
[14] : Vladimir Blasko, Vikram Kama , « A new mathématical model and control of
three phase AC-DC voltage source converter » , IEEE Trans on power electronics,
Vol. 12,No. 1, Jan, 1997

[15] : Sun-Kyong Lim, Juan-Ha Kim, and Kwanghee Nam, « A DC-Link voltage
balancing algorifhm for 3 level converter using the zero sepence current », IEEE . PESC Coderence Record,Vol.2,pp. 1083-1 088,1999
[163 : Yanhung Xue, Xingyi Xu, Thomas G.Habetler, and Deepakraj M-Divan
« A stator flux-oriented voltage source variable-speed drive based on DC link
rneasuremenf». IEEE iransactions on industry applications, V01.27~N0.5~pp.962-
969,Sep/Oct 199 1.
[17] : Hirofumi Akagi, Yoshihira Kanazawa, and Akira Nabae (1 984) « Instantaneuus
reactive power compensators comprising switching devices without energy storage
components », IEEE transactions on industry applications, Vo1.I.A-20,No.3 ,pp.625-
630,May / June 1984.
[18] : Paul C.Krause, Oleg Wasynczuk, Scott DSutdhoff « Anabsis of electric
machinery » IEEE Press, 1994.
[ 1 91 : Philippe Barret «Régimes transitoires des machines tournantes électriques»
Éditions Eyrolles, 1987
ANNEXE
Allure du flux au stator.
Consigne vitesse = 120 rads, couple résistant : Tr = O N.m.
Consigne vitesse = 120 rad/s, couple résistant : Tr = 5 N-m.
Consigne vitesse = 150 rads, couple résistant : Tr = O N.m.
Consigne vitesse = 120 rads, moment d'inertie j = 0.2 kg.m2 -
Consigne vitesse = -120 radfs, couple résistant : Tr = O N.m.
Consigne vitesse = 120 rads, couple de perturbation : Tr = 5 N.m à l'instant 1.5s.
Consigne vitesse = 5 rad/s, couple de perturbation : Tr = 5 N.m à l'instant 0.5s.
Consigne vitesse = 0.5 radk, couple de perturbation : Tr = 5 N.m a l'instant 0.5s.
Consigne couple = 8 N.m, couple résistant : Tr = O Nam.
Consigne couple = 8 N.m, couple résistant : Tr = 5 N.m.
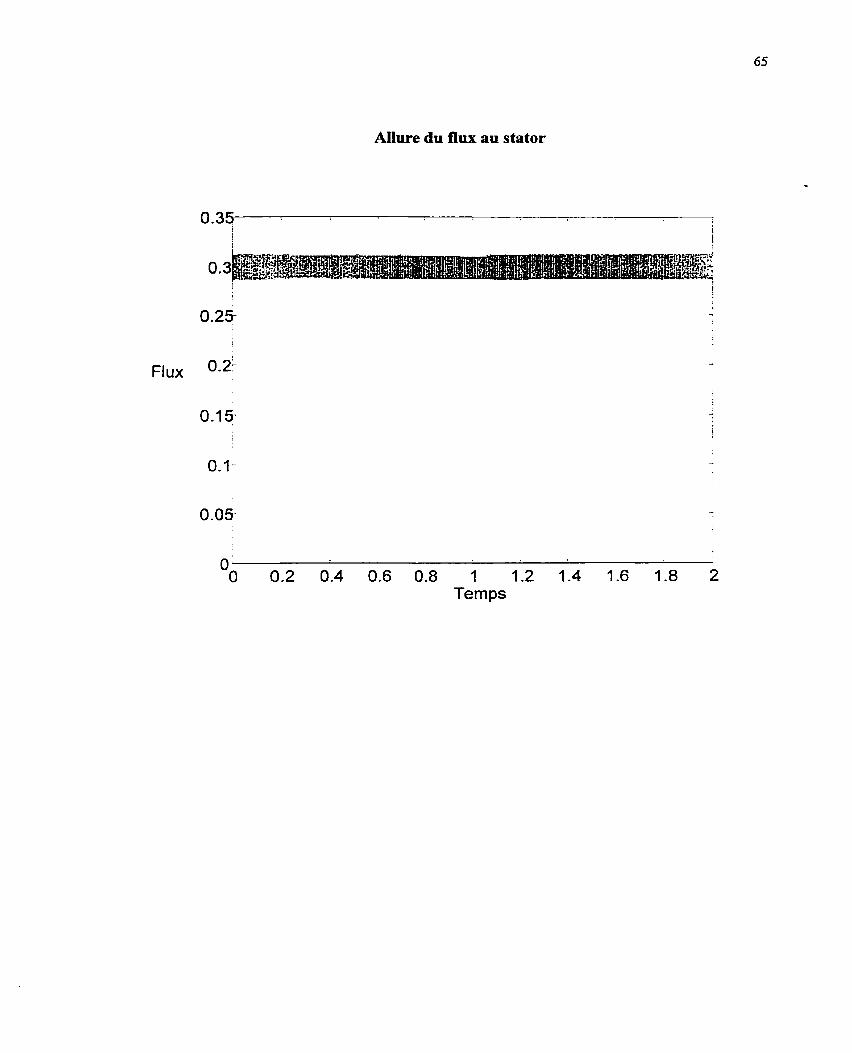
Allure du flux au stator
0.25 I
Flux 0.2'
0: O 0.2 0.4 0.6 0-8 1 1.2 1.4 1.6 1.8 2
Temps

Consigne vitesse = 120 rad/s, couple résistant : Tr = O N.m

Consigne vitesse = 120 rad/s, couple résistant : Tr = 5 N.m
Temps 20, 1 I 1
Temps 100, l , 1
I I
Temps
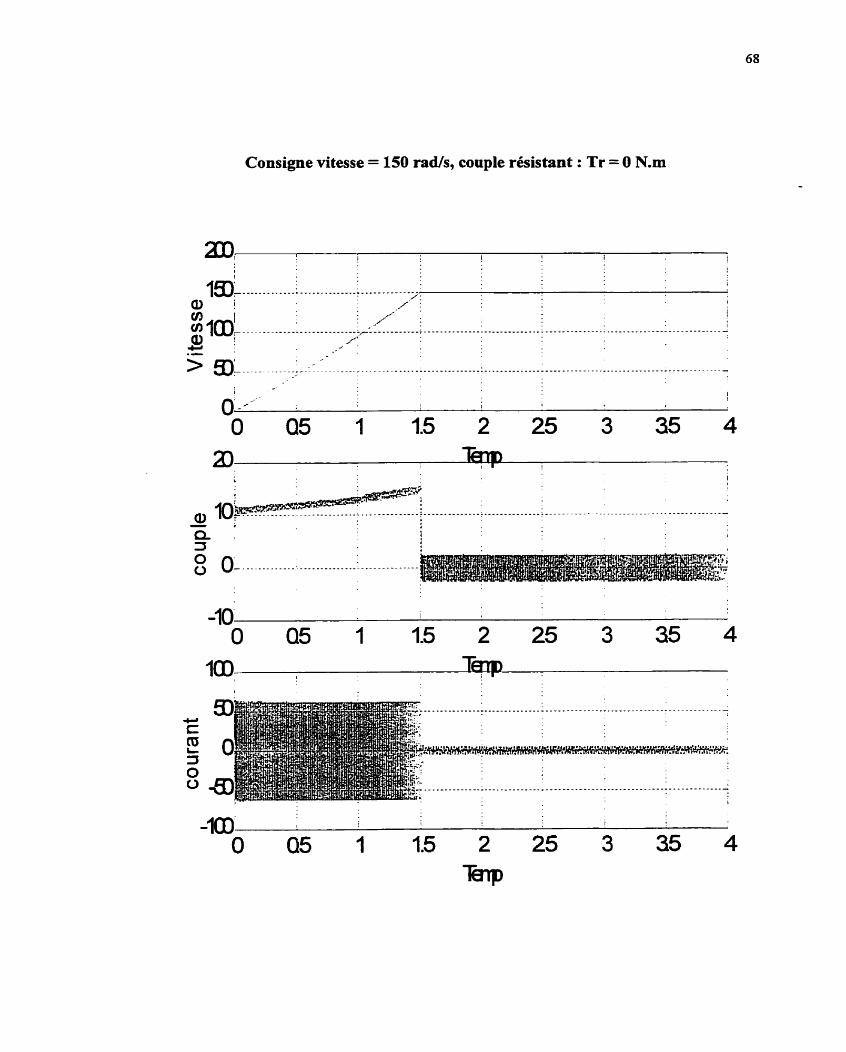
Consigne vitesse = 150 rad/s, couple résistant : Tr = O N.m
Consigne vitesse = 120 rad/s, moment d'inertie j = 0 3 kg.m2

Consigne vitesse = -120 râd/s, couple résistant : Tr = O N.m
Consigne vitesse = 120 rads, couple de perturbation : Tr = 5 N.m à l'instant 1.5s
Consigne vitesse = 5 radis, couple de perturbation : Tr = 5 N.m à l'instant 0 5 s
Consigne vitesse = 0.5 rad/s, couple de perturbation : Tr = 5 N.m à l'instant 0.5s

Consigne couple = 8 N.m, couple résistant : Tr = O N.m

Consigne couple = 8 N.m, couple résistant : Tr = 5 N.m


















