ON THE WAVE-CANCELLING NATURE OF BOUNDARY LAYER … · 2018-10-27 · On the wave-cancelling nature...
7
ON THE WAVE-CANCELLING NATURE OF BOUNDARY LAYER TRANSITION CONTROL Kenzo Sasaki * , Pierluigi Morra ** , André V. G. Cavalieri * , Ardeshir Hanifi ** , Dan S. Henningson ** * Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, 12228-900, Brazil , ** KTH Royal Institute of Technology, Stockholm, SE-100-44, Sweden Keywords: Flow control, Tollmien-Schlichting waves, feedforward control. Abstract This work deals with the feedforward active con- trol of velocity fluctuations over incompressible 3D boundary layers. Two strategies are eval- uated, the Linear Quadratic Gaussian (LQG) controller, built using the eigensystem realiza- tion algorithm (ERA), is compared to a wave- cancellation scheme, obtained via the direct in- version of the frequency-domain transfer func- tions of the system. For the evaluated cases, it is shown that LQG leads to a wave-cancelling signal of the incoming Tollmien-Schlichting wavepacket. Such result allows further insight into the physics behind the active control of con- vectively unstable flows permitting, for instance, the optimization of the transverse position for ac- tuation via a linear stability approach. 1 General Introduction The manipulation of the flow dynamics via passive or active control strategies poses a challenge with several foreseeable industrial and technological applications, and there is a partic- ular interest in the delay of the laminar-turbulent transition of a boundary layer and consequent drag reduction, as the main expenses of a com- mercial airline are related to fuel consumptions [1]. In a low free-stream turbulence environment, transition of unswept wings is most often due to Tollmien-Schlichting (TS) waves which, depending on the Reynolds number of the flow, will grow exponentially until a critical amplitude will lead to non-linear interactions [2] and finally breakdown to turbulence. In general, the actuation is placed in a region where the amplitude of the TS waves is small, and the convective nature of the flow is accounted via a feedforward scheme, where the input signal is not affected by the actuation. Several examples of this type of control may be found in the literature; for instance Fabbiane et al. [4, 3] apply linear-quadratic-Gaussian (LQG) and adaptive schemes and Li & Gaster [5] consider an inversion of transfer functions for the active control of 3D boundary-layers. The work of Fabbiane et al. [3] evaluates the energy budget related to active control and demonstrates that, even though the actuation is performed in a region of low amplitude of the TS waves, with the currently available flow control actuators, it can difficult to obtain drag reductions below the energy break-even point, for their evaluated cases. With this in mind, we propose an inversion technique based on the nature of the convectively unstable flow and show that the more complex LQG controller reduces to such strategy, in the frequencies of interest for control, leading to a wave-cancellation scheme. The control law is similar to the one proposed in Li & Gaster [5], however a penalization of the actuation signal is also included, which allows uncontrollable frequencies to be disregarded and increases the 1
Transcript of ON THE WAVE-CANCELLING NATURE OF BOUNDARY LAYER … · 2018-10-27 · On the wave-cancelling nature...

ON THE WAVE-CANCELLING NATURE OF BOUNDARYLAYER TRANSITION CONTROL
Kenzo Sasaki∗ , Pierluigi Morra∗∗ , André V. G. Cavalieri∗ , Ardeshir Hanifi∗∗ , Dan S.Henningson∗∗
∗Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, 12228-900, Brazil ,∗∗KTH Royal Institute of Technology, Stockholm, SE-100-44, Sweden
Keywords: Flow control, Tollmien-Schlichting waves, feedforward control.
Abstract
This work deals with the feedforward active con-trol of velocity fluctuations over incompressible3D boundary layers. Two strategies are eval-uated, the Linear Quadratic Gaussian (LQG)controller, built using the eigensystem realiza-tion algorithm (ERA), is compared to a wave-cancellation scheme, obtained via the direct in-version of the frequency-domain transfer func-tions of the system. For the evaluated cases, itis shown that LQG leads to a wave-cancellingsignal of the incoming Tollmien-Schlichtingwavepacket. Such result allows further insightinto the physics behind the active control of con-vectively unstable flows permitting, for instance,the optimization of the transverse position for ac-tuation via a linear stability approach.
1 General Introduction
The manipulation of the flow dynamics viapassive or active control strategies poses achallenge with several foreseeable industrial andtechnological applications, and there is a partic-ular interest in the delay of the laminar-turbulenttransition of a boundary layer and consequentdrag reduction, as the main expenses of a com-mercial airline are related to fuel consumptions[1].In a low free-stream turbulence environment,transition of unswept wings is most often dueto Tollmien-Schlichting (TS) waves which,
depending on the Reynolds number of the flow,will grow exponentially until a critical amplitudewill lead to non-linear interactions [2] andfinally breakdown to turbulence. In general,the actuation is placed in a region where theamplitude of the TS waves is small, and theconvective nature of the flow is accounted via afeedforward scheme, where the input signal isnot affected by the actuation. Several examplesof this type of control may be found in theliterature; for instance Fabbiane et al. [4, 3]apply linear-quadratic-Gaussian (LQG) andadaptive schemes and Li & Gaster [5] consideran inversion of transfer functions for the activecontrol of 3D boundary-layers.The work of Fabbiane et al. [3] evaluates theenergy budget related to active control anddemonstrates that, even though the actuationis performed in a region of low amplitude ofthe TS waves, with the currently available flowcontrol actuators, it can difficult to obtain dragreductions below the energy break-even point,for their evaluated cases.With this in mind, we propose an inversiontechnique based on the nature of the convectivelyunstable flow and show that the more complexLQG controller reduces to such strategy, in thefrequencies of interest for control, leading to awave-cancellation scheme. The control law issimilar to the one proposed in Li & Gaster [5],however a penalization of the actuation signalis also included, which allows uncontrollablefrequencies to be disregarded and increases the
1

KENZO SASAKI , PIERLUIGI MORRA , ANDRÉ CAVALIERI , ARDESHIR HANIFI , DAN S. HENNINGSON
robustness of the system with respect to noiseand model uncertainties. Knowledge that theclosed-loop control acts via a wave-cancellingsignal allows a further stability analysis to im-prove the shape of actuation in order to diminishthe amplitude of actuation.
2 Methods and Baseline case for study
The incompressible Navier-Stokes equationsmodel the flow,
∂u∂t
+(u ·∇)u =−∇p+1
Re∇
2u+λ(x)u+ f (1)
∇ ·u = 0 (2)
where u(x, t) and p(x, t) are the velocity andpressure, respectively, at each time step t andposition x = (X1,X2,X3), taken in the cartesiancoordinates. The streamwise direction X1 isaligned with the free-stream velocity U∞, X2 isnormal to the surface of the plate and X3 definesa spanwise direction. Two-dimensional andthree-dimensional simulations are performed;for the former, the dependence of the quantitiesalong the spanwise direction is not considered.A plate of semi-infinite length lies in the X1X3plane, where no-slip conditions are enforced atX2 = 0. Direct Numerical Simulations (DNS)using the spectral code SIMSON are performedto analyse the control action. The flow is peri-odic along the spanwise direction and a fringeforcing, given as λ(x), introduced in the last 20%of the domain, ensures periodicity also along thestreamwise direction [7]. These periodic direc-tions are discretised using a Fourier basis, andfor the wall-normal direction Chebyshev polyno-mials are used. Figure 2 presents a scheme of thesimulation and coordinates considered.
Spatial coordinates and velocities are non-dimensionalized using the displacement thick-ness δ∗ in the entrance of the domain and thefree-stream velocity U∞, respectively. The result-ing Reynolds number, defined as Re = δ∗U∞/ν,
Fig. 1 Scheme for the 3D simulation of the flatplate considered. The blue and red circles repre-sent the input sensors and actuators, respectively.
where ν is the kinematic viscosity, is 1000. Timeintegration is performed using the fourth-orderCrank-Nicholson/Runge-Kutta method, with aconstant non-dimensional time step of ∆t = 0.4.The computational domain for the 3D simulationis of [0,1000]× [0,30]× [−70,70] in the X1, X2and X3 directions, with Nx1 = 768 and Nx3 = 96Fourier modes at the X1X3 plane and Nx2 = 101Chebyshev polynomials at the vertical direction.The 2D simulation is performed with the sameX1X2 configurations.A volume forcing f is used both to introduce ran-dom disturbances and to perform the control ac-tion. The forcing is divergent-free, consisting oflocalized synthetic vortices [6], with spatial sup-port given as
b =[χX2,−γX1,0
]exp(−X1
2 − X22 − X3
2) (3)
where X1 = (X1 − X10)/χ, X2 = (X2 − X20)/γ
and X3 = (X3 − X30)/ζ, such that X10, X20 andX30 indicate the position where the disturbanceis centred and χ, γ and ζ the spatial decay ofthe force. A random broadband signal d(t)modulates the forcing at the position of upstreamperturbations, whereas a control signal u(t)determines the actuation signal at the positionX1u.A localized measurement of the streamwise skinfriction is used to define the inputs given bysensors y(t), and downstream objective, z(t).Four rows of equispaced independent objects areplaced with a transverse separation of ∆X3 = 10
2

On the wave-cancelling nature of boundary layer transition control
++
Fig. 2 Resulting block diagram for feedforwardcontrol.
for the 3D simulation. Disturbances are added atthe wall, at X1d = 35, measurements are takenat X1y = 300 and X1z = 500, defining input andobjective, respectively. Actuation is performed atX1u = 400, both on the wall, for the baseline case,and at an optimized position to be discussed later.
The scheme we consider for control is reac-tive to input behaviour, with input upstream ofthe actuation, leading to a feedforward scheme,as the flow is strongly convective. Figure 2presents the resulting block diagram for this pur-pose, the transfer function Gyz(ω), where ω isthe angular frequency, determines the relation be-tween input position and objective, y, u and z areinput, actuation and output respectively.Such transfer functions were obtained from threestrategies: the Fourier transform of the impulseresponses of the system, an empirical frequency-response or using theoretically constructed bymeans of solutions of the parabolized stabilityequations (PSE) [12].
The role of the controller will be to determinethe kernel such that the actuation, described via afinite impulse response filter (FIR), which reads
u(t) =∫ +∞
0k(τ)y(t − τ)dτ (4)
The kernel k(t) defines the control law, and twocases will be considered. The first is optimal lin-ear quadratic gaussian [9] applied to a reduced-order model of the linearized system obtainedwith the eigensystem realization algorithm[10];the second is the direct inversion of the system,performed in the frequency-domain from the im-
pulse responses of the linearized simulation. Forthe latter, we superpose the open-loop signal withan actuation, such that the Fourier-transformedoutput is given by
Z(ω) = Y (ω)Gyz(ω)+U(ω)Guz(ω) (5)
and minimize the functional,
J =∫
∞
−∞
[U∗(ω)R(ω)U(ω)+ Z(ω)∗Q(ω)Z
]dω
(6)defined in the frequency-domain, which penal-izes both actuation and output. We take U(ω) =K(ω)Y (ω), and the inverse Fourier transform ofK(ω) will lead to a FIR format such that the actu-ation is computed via equation 4. This procedure,which we will refer to as wave-cancellation, hasthe added advantage of not depending on the stepof building a reduced-order model for computa-tion of the control, dealing directly with the trans-fer functions obtained using impulse responses ofthe system.The extension of this method and the resultingkernels for a 3D boundary layer involves a sec-ond Fourier transform, from X3 to the transversewavenumber β, and this derivation may be foundin Sasaki et al. [11].The actuation for the 3D boundary layer, writ-ten in its discretized form, for M+1 sensors andactuators is given by a double discrete convolu-tion of the measurements with the kernel, using abuffer of N points for the the time discretization:
ul(n) =M/2
∑m=−M/2
N
∑j=0
km( j)yl−m(n− j), (7)
The baseline case for study considers the stream-wise positions of X1 = 300, 400 and 500 forinput, actuation and output, respectively; inflowdisturbances are inserted at X1 = 35.
3 Results
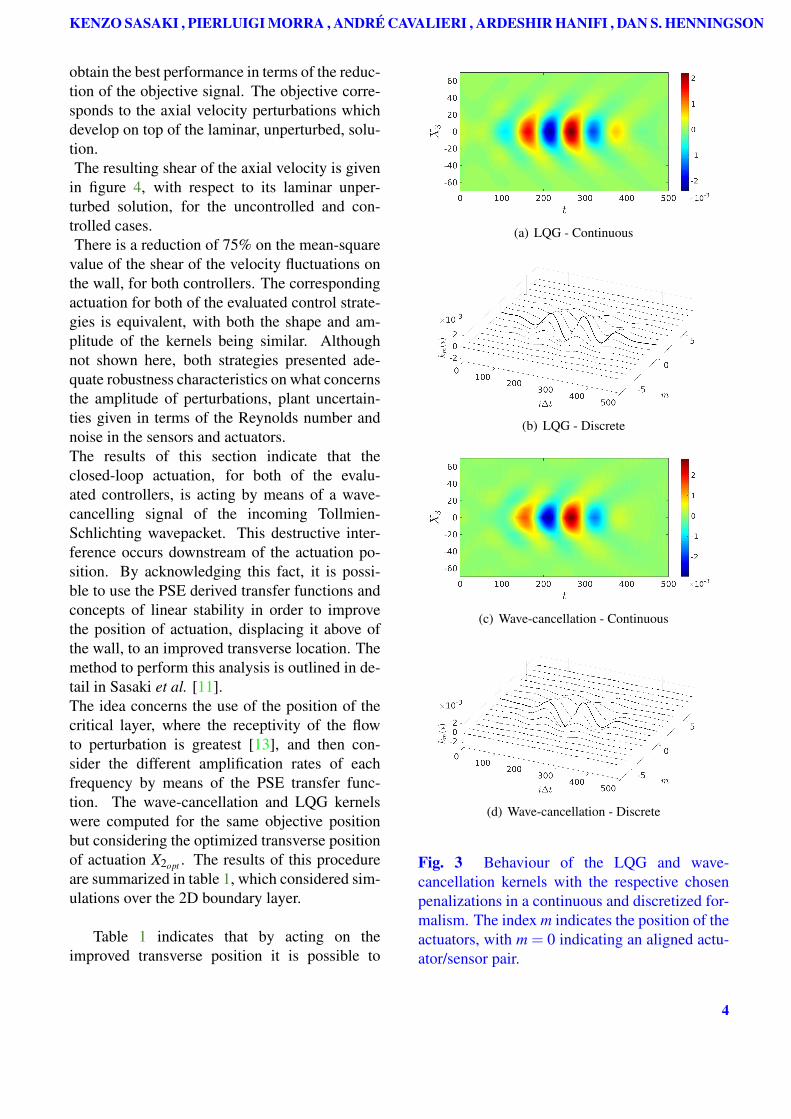
Figure 3 shows the LQG and wave-cancellationkernels, which were calculated by evaluating thepenalizations of the state and actuation in order to
3
KENZO SASAKI , PIERLUIGI MORRA , ANDRÉ CAVALIERI , ARDESHIR HANIFI , DAN S. HENNINGSON
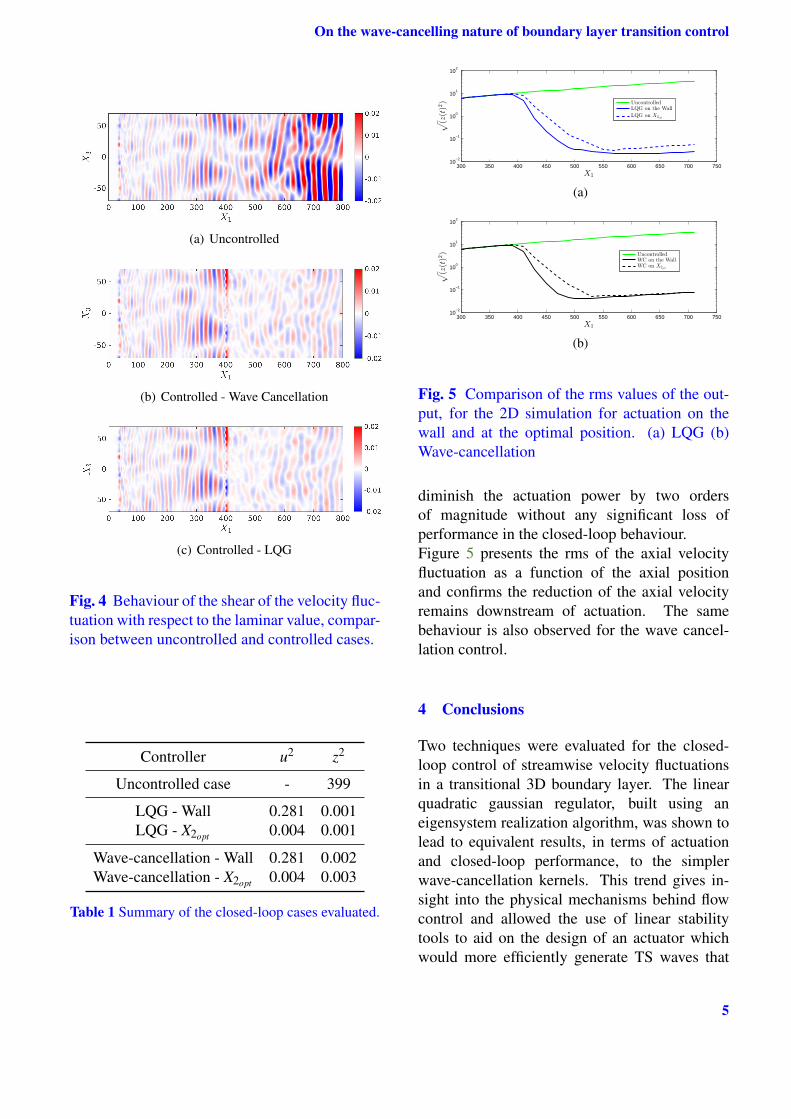
obtain the best performance in terms of the reduc-tion of the objective signal. The objective corre-sponds to the axial velocity perturbations whichdevelop on top of the laminar, unperturbed, solu-tion.The resulting shear of the axial velocity is given
in figure 4, with respect to its laminar unper-turbed solution, for the uncontrolled and con-trolled cases.There is a reduction of 75% on the mean-square
value of the shear of the velocity fluctuations onthe wall, for both controllers. The correspondingactuation for both of the evaluated control strate-gies is equivalent, with both the shape and am-plitude of the kernels being similar. Althoughnot shown here, both strategies presented ade-quate robustness characteristics on what concernsthe amplitude of perturbations, plant uncertain-ties given in terms of the Reynolds number andnoise in the sensors and actuators.The results of this section indicate that theclosed-loop actuation, for both of the evalu-ated controllers, is acting by means of a wave-cancelling signal of the incoming Tollmien-Schlichting wavepacket. This destructive inter-ference occurs downstream of the actuation po-sition. By acknowledging this fact, it is possi-ble to use the PSE derived transfer functions andconcepts of linear stability in order to improvethe position of actuation, displacing it above ofthe wall, to an improved transverse location. Themethod to perform this analysis is outlined in de-tail in Sasaki et al. [11].The idea concerns the use of the position of thecritical layer, where the receptivity of the flowto perturbation is greatest [13], and then con-sider the different amplification rates of eachfrequency by means of the PSE transfer func-tion. The wave-cancellation and LQG kernelswere computed for the same objective positionbut considering the optimized transverse positionof actuation X2opt . The results of this procedureare summarized in table 1, which considered sim-ulations over the 2D boundary layer.
Table 1 indicates that by acting on theimproved transverse position it is possible to
(a) LQG - Continuous
(b) LQG - Discrete
(c) Wave-cancellation - Continuous
(d) Wave-cancellation - Discrete
Fig. 3 Behaviour of the LQG and wave-cancellation kernels with the respective chosenpenalizations in a continuous and discretized for-malism. The index m indicates the position of theactuators, with m = 0 indicating an aligned actu-ator/sensor pair.
4
On the wave-cancelling nature of boundary layer transition control
(a) Uncontrolled
(b) Controlled - Wave Cancellation
(c) Controlled - LQG
Fig. 4 Behaviour of the shear of the velocity fluc-tuation with respect to the laminar value, compar-ison between uncontrolled and controlled cases.
Controller u2 z2
Uncontrolled case - 399
LQG - Wall 0.281 0.001LQG - X2opt 0.004 0.001
Wave-cancellation - Wall 0.281 0.002Wave-cancellation - X2opt 0.004 0.003
Table 1 Summary of the closed-loop cases evaluated.
300 350 400 450 500 550 600 650 700 75010
−2
10−1
100
101
102
X1
√
(z(t)2)
UncontrolledLQG on the Wall
LQG on X2opt
(a)
300 350 400 450 500 550 600 650 700 75010
−2
10−1
100
101
102
X1
√
(z(t)2)
UncontrolledWC on the WallWC on X2opt
(b)
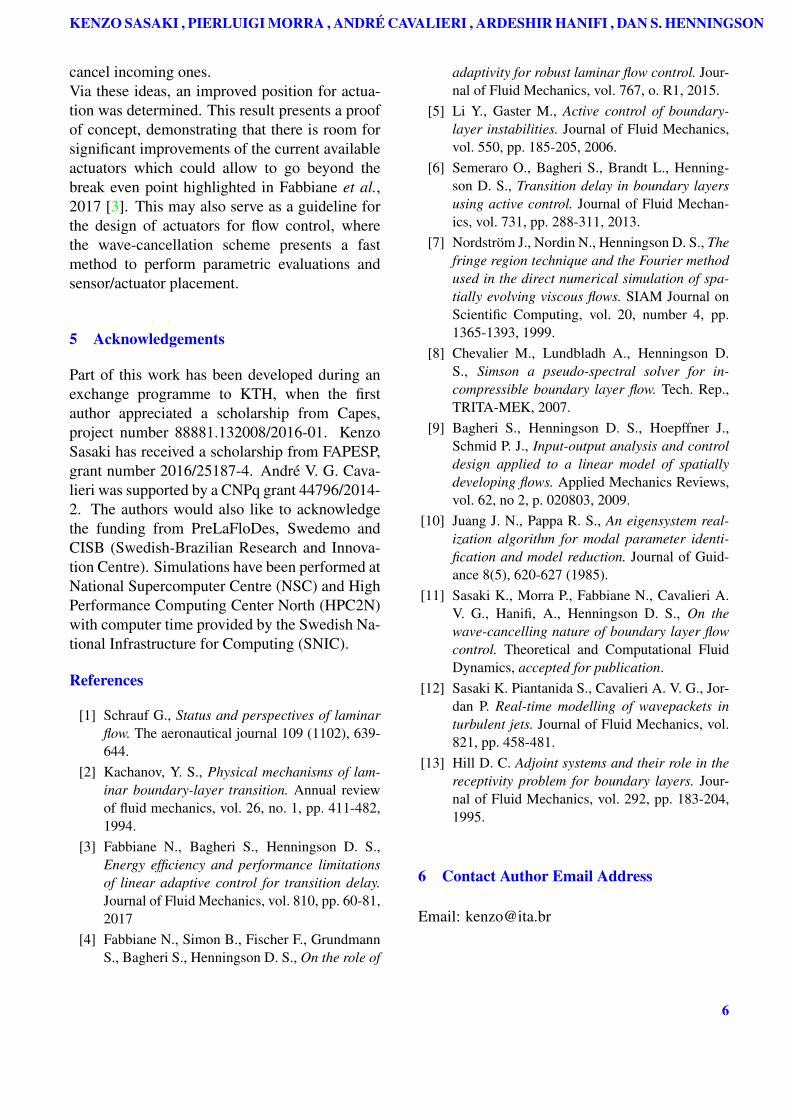
Fig. 5 Comparison of the rms values of the out-put, for the 2D simulation for actuation on thewall and at the optimal position. (a) LQG (b)Wave-cancellation
diminish the actuation power by two ordersof magnitude without any significant loss ofperformance in the closed-loop behaviour.Figure 5 presents the rms of the axial velocityfluctuation as a function of the axial positionand confirms the reduction of the axial velocityremains downstream of actuation. The samebehaviour is also observed for the wave cancel-lation control.
4 Conclusions
Two techniques were evaluated for the closed-loop control of streamwise velocity fluctuationsin a transitional 3D boundary layer. The linearquadratic gaussian regulator, built using aneigensystem realization algorithm, was shown tolead to equivalent results, in terms of actuationand closed-loop performance, to the simplerwave-cancellation kernels. This trend gives in-sight into the physical mechanisms behind flowcontrol and allowed the use of linear stabilitytools to aid on the design of an actuator whichwould more efficiently generate TS waves that
5
KENZO SASAKI , PIERLUIGI MORRA , ANDRÉ CAVALIERI , ARDESHIR HANIFI , DAN S. HENNINGSON
cancel incoming ones.Via these ideas, an improved position for actua-tion was determined. This result presents a proofof concept, demonstrating that there is room forsignificant improvements of the current availableactuators which could allow to go beyond thebreak even point highlighted in Fabbiane et al.,2017 [3]. This may also serve as a guideline forthe design of actuators for flow control, wherethe wave-cancellation scheme presents a fastmethod to perform parametric evaluations andsensor/actuator placement.
5 Acknowledgements
Part of this work has been developed during anexchange programme to KTH, when the firstauthor appreciated a scholarship from Capes,project number 88881.132008/2016-01. KenzoSasaki has received a scholarship from FAPESP,grant number 2016/25187-4. André V. G. Cava-lieri was supported by a CNPq grant 44796/2014-2. The authors would also like to acknowledgethe funding from PreLaFloDes, Swedemo andCISB (Swedish-Brazilian Research and Innova-tion Centre). Simulations have been performed atNational Supercomputer Centre (NSC) and HighPerformance Computing Center North (HPC2N)with computer time provided by the Swedish Na-tional Infrastructure for Computing (SNIC).
References
[1] Schrauf G., Status and perspectives of laminarflow. The aeronautical journal 109 (1102), 639-644.
[2] Kachanov, Y. S., Physical mechanisms of lam-inar boundary-layer transition. Annual reviewof fluid mechanics, vol. 26, no. 1, pp. 411-482,1994.
[3] Fabbiane N., Bagheri S., Henningson D. S.,Energy efficiency and performance limitationsof linear adaptive control for transition delay.Journal of Fluid Mechanics, vol. 810, pp. 60-81,2017
[4] Fabbiane N., Simon B., Fischer F., GrundmannS., Bagheri S., Henningson D. S., On the role of
adaptivity for robust laminar flow control. Jour-nal of Fluid Mechanics, vol. 767, o. R1, 2015.
[5] Li Y., Gaster M., Active control of boundary-layer instabilities. Journal of Fluid Mechanics,vol. 550, pp. 185-205, 2006.
[6] Semeraro O., Bagheri S., Brandt L., Henning-son D. S., Transition delay in boundary layersusing active control. Journal of Fluid Mechan-ics, vol. 731, pp. 288-311, 2013.
[7] Nordström J., Nordin N., Henningson D. S., Thefringe region technique and the Fourier methodused in the direct numerical simulation of spa-tially evolving viscous flows. SIAM Journal onScientific Computing, vol. 20, number 4, pp.1365-1393, 1999.
[8] Chevalier M., Lundbladh A., Henningson D.S., Simson a pseudo-spectral solver for in-compressible boundary layer flow. Tech. Rep.,TRITA-MEK, 2007.
[9] Bagheri S., Henningson D. S., Hoepffner J.,Schmid P. J., Input-output analysis and controldesign applied to a linear model of spatiallydeveloping flows. Applied Mechanics Reviews,vol. 62, no 2, p. 020803, 2009.
[10] Juang J. N., Pappa R. S., An eigensystem real-ization algorithm for modal parameter identi-fication and model reduction. Journal of Guid-ance 8(5), 620-627 (1985).
[11] Sasaki K., Morra P., Fabbiane N., Cavalieri A.V. G., Hanifi, A., Henningson D. S., On thewave-cancelling nature of boundary layer flowcontrol. Theoretical and Computational FluidDynamics, accepted for publication.
[12] Sasaki K. Piantanida S., Cavalieri A. V. G., Jor-dan P. Real-time modelling of wavepackets inturbulent jets. Journal of Fluid Mechanics, vol.821, pp. 458-481.
[13] Hill D. C. Adjoint systems and their role in thereceptivity problem for boundary layers. Jour-nal of Fluid Mechanics, vol. 292, pp. 183-204,1995.
6 Contact Author Email Address
Email: [email protected]
6

On the wave-cancelling nature of boundary layer transition control
Copyright Statement
The authors confirm that they, and/or their companyor organization, hold copyright on all of the origi-nal material included in this paper. The authors alsoconfirm that they have obtained permission, from thecopyright holder of any third party material includedin this paper, to publish it as part of their paper. Theauthors confirm that they give permission, or have ob-tained permission from the copyright holder of thispaper, for the publication and distribution of this pa-per as part of the ICAS proceedings or as individualoff-prints from the proceedings.
7