応用気象学 IB - Kyoto U...2015/11/25 ·...
41
応用気象学 IB 榎 2015 11 25 ~2016 1 13
Transcript of 応用気象学 IB - Kyoto U...2015/11/25 ·...
-
応用気象学 IB
榎本 剛
2015年 11月 25日~2016年 1月 13日
-
目次
講義 1 数値予報の歴史 2
1.1 科学的天気予報 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 数値解法による天気予報 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 計算機を用いた世界最初の数値予報 . . . . . . . . . . . . . . . . . . . . . . . . . . 5
講義 2 方程式系と大気波動 8
2.1 音波と重力波 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 準地衡風方程式系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
講義 3 大気大循環モデルの力学過程 18
3.1 水平離散化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 様々な鉛直座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3 時間積分法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
講義 4 気象データ同化の基礎 27
4.1 データ同化とは何か . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 データ同化の簡単な例題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.3 リモートセンシングの簡単な例題 . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.4 接線型モデルと随伴モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.5 様々なデータ同化手法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.6 再解析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.7 観測データ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1
-
講義 1
数値予報の歴史
この講義では,数値予報の黎明期に貢献したVilhelm Bjerknes (1862–1951),Lewis Fry Richardson
(1881–1953), Jule Charney (1917–1981)の業績を振り返り,数値予報とは何か,どのようにすれば
行うことができるかについて考える。
1.1 科学的天気予報
物理法則による天気予報を初めて提案したのは,ノルウェーの Vilhelm Bjerknes である (Lynch
2000)。Bjerknes (1904)は,次の二つの条件が物理法則に基づいた合理的な天気予報に必要十分であ
ると考えた。
1. 与えられた時刻における十分正確な大気の状態
2. 大気の状態の時間発展を記述する十分正確な法則
現在用いられている解析予報サイクルでは,前者はデータ同化アルゴリズムを用いた解析,後者は
数値モデルを用いた予報に対応する。Bjerknes (1904)は,これら二段階に対して医学の用語である
診断(diagnosis),予後(prognosis)を用いた。
よい解析値を作るために,既に実施されていた定時の地上観測に加えて,海上や上空の観測の必要
性を指摘している。船舶からは電信により通報が可能であること,高層気象学の進展により定時の高
層気象観測も不可能ではないとしている。データ同化の必要性については述べられていない。
大気の過程は,力学過程と物理過程からなることを指摘し,未知の変数は風速 3成分,密度,気圧,
気温,湿度の 7つだとした。これらの変数を計算するために必要な方程式は,
1. 運動方程式 3つ。風,密度,気圧の微分方程式
2. 連続の式。質量保存則を表す風と密度の微分方程式
3. 大気の状態方程式。密度,気圧,気温,湿度の決まった関係
4. 熱力学の式 2つ。状態の変化に伴うエネルギーとエントロピーの変化を記述する微分方程式
2
-
熱力学の式に現れる熱として,太陽放射や地球放射,地表面からの顕熱を挙げている。潜熱を考慮
するために熱力学第二法則が必要となるとしているが,水蒸気に対する連続の式が正しい。
7つの変数に対する方程式についての知識は十分であるが,宇宙線や電離,光学(散乱)の効果に
ついては知識が不足しているが,7つの式を用いた予測を始めることは可能だと述べている。
状態方程式により変数はひとつ減り,6つの変数に対する偏微分方程式を解くことになるが,大気
のいたるところで厳密に求めるできないし,厳密解が必要とされる解ではない。厳密解の多くの細部
を無視する必要があり,一定の時空間スケール以上の現象が予測できればよいと指摘している。この
指摘は,Richardsonの失敗と Charneyの成功を予言している。計算が膨大となり,問題の分割が必
要だとする指摘も,並列計算機を用いている現在を見通しているかのようである。
計算では,同時に起こる変化を逐次的なものに置き換え,無限小の区間を有限の区間に置き換える
離散化を行い数値的に解く。現在でも力学過程と物理過程の結合方法は,依然数値モデルでの課題と
して残されている。
運動方程式の積分は現在とは異なり,幾何学的解法を用いることを提案している。山岳の影響を考
慮することや地表摩擦,海面での蒸発,雲・降水過程には未知の部分が多く経験的な方法が必要であ
るとしている。現在では多くの過程が観測され,シミュレーションが行われ,理解が進んでいるが,
こられの過程の多くは現在でもパラメタリゼーションを用いている。
Bjerknes (1904)は,数学的には乗り越えられない困難はないとし,個々の計算は単純だが計算量
が膨大であること,精度は時間刻み幅に依存することを指摘している。いずれ数値予報が実用化され
るとの見通しを示してこの論文を締めくくっている。
1.2 数値解法による天気予報
Bjerknes (1904) が示した物理法則に基づく天気予報を実践したのは,Lewis Fry Richardson で
ある。Richardsonは 1913年に英国気象局に就職し Bjerknesらの計画を知り,実践しようと考えた
(Lynch 2000)。Richardsonの試みは「数値処理による天気予報」(Weather Prediction by Numerical
Process, Richardson 1922)にまとめられている。
Richardsonは様々な実験をしているが,線型化された浅水波方程式
∂u
∂t− fv + ∂
∂x
(p′
ρ0
)= 0 (1.1)
∂v
∂t+ fu+
∂
∂y
(p′
ρ0
)= 0 (1.2)
∂
∂t
(p′
ρ0
)+ gH∇ · v = 0 (1.3)
を用い,全球で波数 1の理想的な初期値からの実験を行っている。Lynch (1992)は Richardsonの手
法を解説するとともに,再現実験を行った。
Richardsonは,地衡風の発散
∇ · vg = −β
fvg = −
β
ρ0f2∂p′
∂x(1.4)
3
-
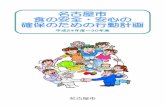
図 1.1 Richardson (1922)が行った浅水波方程式を用いた実験の Lynch (1992)による再現実験
から気圧の変化傾向∂p′
∂t=gHβ
f2∂p′
∂x(1.5)
を特定の点(英国海峡付近)で 3/4 h に 2.623 hPa と見積もっている。これは Richardson が数値
的に求めた値 2.621 hPaとよく一致している。気圧変化傾向は位相が西進することを示唆したため,
Richardson は低気圧が東進する観測とは異なるので地衡風は不適当だと結論している。位相の西
進は,約 5 日で地球を一周する西進ロスビー波であり,成層圏上部で観測されている (Hirota and
Hirooka 1984)。地衡風と南北温度傾度から温度風平衡が得られ,上空には偏西風があることが示唆
される。しかし,Richardsonは偏西風の存在を認識していなかったのではないかと Lynch (1992)は
推測している。
Lynch (1992)は,全球モデルに陰解法を適用して,Richardsonが用いた陽解法の数値的不安定を
回避し,5日先までの高度や風の分布を示した(図 1.1)。Richardsonは風の観測に含まれる誤差のた
めに収束が過大になったと考えたが,実際は気象学的ノイズと呼ばれる速い変動が観測に含まれてお
り,これを取り除く初期値化(initialization)を行わなかったため計算が破綻したと考えられる。
同様の理由で,傾圧モデルを用いた実験では,Richardsonは 6 hあたり 145 hPaという非現実的
な値を得ている。Richardsonの実験では現実的な結果は得られず,解釈に誤りも見られるが,手法や
結果を詳細に記し,書物に残したことはその後の数値予報の発展に寄与することとなった。
4
-
NUMERICAL INTEGRATION O F THE BAROTROPIC VORTICITY EQUATION 245
by the limited internal memory capacity of the Eniac. It may be of interest to remark that the computation time for a 24-hour forecast was about 24 hours, that is, we were just able to keep pace with the weather. However, much of this time was consumed by manual and I.B.M. operations, namely by the reading, printing, reproducing, sorting, and interfiling of punch cards. In the course of the four 24 hour forecasts about IOO,OOO standard I.B.M. punch cards were produced and I ,ooo,ooo multiplications and divisions were performed. (These figures double if one takes account of the preliminary experimentation that was carried out.) With a larger capacity and higher speed machine, such as is now being built at the Institute for Advanced Study, the non-arithmetical operations will be eliminated and the arithmetical operations performed more quickly. It is estimated that the total computation time with a grid of twice the Eniac-grids density, will be about I / * hour, so that one has reason to hope that RICHARDSON’S dream (1922) of advancing the computation faster than the weather may soon be realized, at least for a two-dimensional model. Actually we estimate on the basis of the experiences acquired in the course of the Eniac calculatons, that if a renewed system- atic effort with thc Eniac were to be made, and with a thorough routinization of the operations, a 24-hour prediction could be made on the Eniac in as little as 12 hours.
Insofar as possible, weather situations were chosen in which the changes of interest occurred over North America or Europe, the areas with the best data coverage. I t must be borne in mind, however, that forecasts for the western coasts are reduced somewhat in ac- curacy by lack of data in the Pacific and Atlantic oceans.
The data were taken from the conventional 500 mb analyses of the U. S. Weather Bureau and were accepted without modification in interpolating for the initial values of 2 at the grid oints. It was realized that the conven-
direction than to wind speed and more atten- tion to directional smoothness of the height contours than to their spacing, but it was thought that the more or less random errors introduced in this way would be smoothed ou t in the integration. Unhappily this was
tiona P analyst pays more attention to wind
Fig. I . A typical finite-difference grid used in the computations. A strip two grid intervals in width at the top and side bordcrs and one grid interval in width
at the lower border is not shown.
not always so, and it now appears that an objective analysis would have been preferable.
The forecasts were made from the 0300 GMT 500 mb charts for January 5 , 30, and 31, and February 13, 1949. On these dates the weather systems were of so large an amplitude that their development could not have been explained by small perturbation theory or by simple translation. Each forecast is illustrated by four diagrams (fig. 2-5): (a) contains the initial height contours in units of 100 ft and the initial isolines of absolute vorticity in units of 1 /3 x 10-4 sec-1; (b) contains the observed height contours and constant absolute vorticity lines 24 hours later; in (c) the contours of observed height change in hundreds of feet are shown as continuous lines and the contours of predicted height change as broken lines; (d) shows the predicted height contours and constant absolute vorticity lines.
The spurious boundary influences were removed, by excluding from the drawings a strip adjacent to the boundaries which was two grid intervals in width at the west, east, and north boundaries, and one grid interval in width at the south boundary where the influence velocities were smaller.
The forecast of January 5, in which the principal system was an intense cyclone over the United States, was uniformly poor. The forecast gave much too small a displacement
図 1.2 Charney et al. (1950)が用いた計算領域
1.3 計算機を用いた世界最初の数値予報
Charney et al. (1950) は,世界初の汎用電子計算機 ENIAC (Electronic Numerical Integrator
and Computer) を用いて北米を対象とした 24時間予報に成功した。計算の対象とした領域は,北米
(図 1.2)で 19×16点に離散化されている。計算領域は,北極に接する平面に投影されている(polar stereo,平射図法,立体射影)。ポーラー
ステレオでは,平面上の中心からの距離 Rと緯度 ϕとの関係,コリオリ項 2Ω sinϕ,拡大因子は次の
通りである。
R = 2acosϕ
1 + sinϕ(1.6)
f ≡ 2Ω sinϕ = 2Ω1− (R/2a)2
1 + (R/2a)2(1.7)
m ≡ dR−adϕ
=2
1 + sinϕ= 1 +
(R
2a
)2(1.8)
重力波を含めて計算するために必要な時間刻み幅は 15分以下で,24時間の予報に必要な 96ステッ
プを実行するには計算機資源が不足する。そこで,Charney et al. (1950)は準地衡風近似を仮定し,
5
-
50 JANUARY 2008|
errors greatly exceed those of a persistence forecast. The root-mean-square (RMS) error is greater than persistence in case 1, less in case 2, and about equal in the remaining cases. The S1 score, introduced at an early stage of NWP (Teweles and Wobus 1954), measures skill in predicting gradients that are meteorologically significant. The S1 score is about the same as that of persistence for case 1 and significantly better for the other three cases. On the basis of this score, all four forecasts have some skill.
In CFvN it is noted that the computation time for a 24-h forecast was about 24 h, that is, the team could just keep pace with the weather provided ENIAC did not fail. This time included offline operations: reading, punching, and interfiling punch cards. Von Neumann estimated that it would have taken five hand-computer years to duplicate the ENIAC com-
putations (Nebeker 1995). Addressing the National Academy of Sciences, Charney said, “It mattered little that the twenty-four-hour prediction was twenty-four hours in the making. That was purely a technological problem. Two years later we were able to make the same prediction on our own machine [von Neumann’s IAS computer] in five minutes” (Charney 1955).
During his Starr Lecture, George Platzman arranged with IBM to repeat one of the ENIAC forecasts. The algorithm of CFvN was coded on an IBM 5110, a desktop machine then called a portable computer or “PC” (having a tiny fraction of the power of a modern PC). The program execution was completed within the hour or so of Platzman’s lecture. This implies a 24-fold speedup over the best rate achievable for ENIAC. The program eniac.m
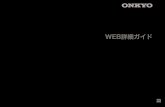
FIG. 4. Reconstructed forecast for 5 Jan 1949: (a) analysis of 500-hPa geopotential height (thick lines) for
0300 UTC 5 Jan, (b) analysis for 0300 UTC 6 Jan, (c) observed change (solid) and forecast change (dashed), and
(d) forecast height valid at 0300 UTC 6 Jan. Height contour interval is 50 m.図 1.3 Lynch (2008)による Charney et al. (1950)の 1949年 1月 5日 0300 UTCからの予報
の再現実験。(A) 初期場,(B) 24時間後の解析場,(C) 解析(実線)及び予報(破線)の時間変化
次の非発散の順圧渦度方程式(絶対渦度保存則)を用いた。
d(ζ + f)
dt=∂ζ
∂t+ v∇ · (ζ + f) = 0 (1.9)
予報変数は高度 z
ζ = ∇ · gf∇z = g
f∇2z + βu
f(1.10)
であるが,スケーリングから第 2項(β 項)を無視した。時間刻み幅は,1, 2, 3時間を試し,3時間
でも安定して積分ができ結果に大きな差はないことを確認した。初期値は 1949年 1月 5, 30, 31日,
2月 13日それぞれ 0300 UTCにおける 500 hPa高度である。
図 1.3は,Charney et al. (1950)の 1月 5日 0300 UTCからの予報を Lynch (2008)が再現した
ものである。(A)と (B)を比較すると,北米上の気圧の谷が 90◦Wまで東進している。これに対し,
予報では谷の位相が遅れている。Charney et al. (1950) は誤差の要因に関し空間解像度の不足と傾
圧効果について議論している。これに対し,β 項を考慮すると Phillips (2000)は講演で述べ,Lynch
(2008)が数値実験で確認している。
6
-
課題
平均の深さ H で,静水圧平衡にある,密度 ρ0 一定の流体に対する方程式系は次のように書ける。
du
dt− fv = − 1
ρ0
∂p
∂x(1.11)
dv
dt+ fu = − 1
ρ0
∂p
∂y(1.12)
∂u
∂x+∂v
∂y+∂w
∂z= 0 (1.13)
dp
dz= −ρg (1.14)
初期場は静止している(u = v = w = 0)とき,線型化された擾乱の方程式は,(1.1)–(1.3))と同型に
なることを示せ。
7
-
講義 2
方程式系と大気波動
ここでは,Arakawa and Konor (2009)に従って,大気中に存在しうる様々な波動について調べる。
2.1 音波と重力波
2.1.1 基礎方程式系
f 平面上の等温大気(T = T0)に対する次のような基礎方程式系を考える。
du
dt= fv − 1
ρ
∂p
∂x(2.1)
dv
dt= −fu− 1
ρ
∂p
∂y(2.2)
dw
dt= − 1
ρ
∂p
∂z− g (2.3)
d ln θ
dt= 0 (2.4)
dp
dt= −c2sρ
(∂u
∂x+∂v
∂y+∂w
∂z
)(2.5)
線型化された方程式系(擾乱を表す ′ は省略)は,次のようになる。
∂u
∂t= fv − ∂
∂x
(p
ρ
)(2.6)
∂v
∂t= −fu− ∂
∂y
(p
ρ
)(2.7)
δ∂w
∂t= −
(∂
∂z− κH
)p
ρ+ g
θ
θ(2.8)
∂
∂t
(θ
θ
)= − κ
Hw (2.9)
1
c2s
∂
∂t
(p
ρ
)= − 1
ρ
{∂u
∂x+∂v
∂y+
[∂
∂z+
1
H(κ− 1)w
]}(2.10)
8
-
準静力学(quasi-hydrostatic,プリミティブ)系 静力学平衡を仮定し,(2.8)で δ = 0とする。
非弾性(anelastic)系 熱力学変数の水平一様成分からのずれが小さいと仮定し,連続の式で密度の
局所時間微分を無視する (Ogura and Phillips 1962)。上の方程式系では,(2.8)及び (2.10)の
下線及び二重下線を無視する。
擬非圧縮(pseudo-incompressible)系 連続の式における気圧の局所時間微分を無視するので,(2.10)
の下線を無視する (Durran 1989)。
統一(unified)系 連続の式の密度を静力学の密度に置き換える。気圧を静力学成分とそれからのず
れに分ける (Arakawa and Konor 2009)。
p = pqs + p′ (2.11)
以下 pqs は単に pと書く。
簡単のため y 方向に一様であるとし,
b ≡ g θθ
(2.12)
N2 ≡ gd ln θdz
(2.13)
d ln θ
dz=
κ
H(2.14)
を用いると,
∂2u
∂t2= −f2u− ∂
2
∂t∂x
(p
ρ+p′
ρ
)(2.15)
δ∂w
∂t= −
(∂
∂z− κ
H
)(p′
ρ
)(2.16)
∂b
∂t= −N2w (2.17)(
∂
∂z− κ
H
)(p
ρ
)= b (2.18)
1
c2s
∂
∂t
(p
ρ+ ε
p′
ρ
)= −
{∂u
∂x+
[∂
∂z+
1
H(κ− 1)
]w
}(2.19)
が得られる。
統一系では,(2.10)において ϵ = 0とする。
表 2.1に方程式系を切り替える「スイッチ」をまとめる。
9
-
ε δ 下線
完全圧縮系 1 1 残す
統一系 0 1 残す
擬非圧縮系 N/A 1 下線を無視
非弾性系 N/A 1 下線及び二重下線を無視
準静力学系 1 0 残す
表 2.1 方程式系と ε, δ, 下線,二重下線の関係
2.1.2 波動解
波動解を仮定する。
v = (u,w, b,p
ρ,p′
ρ)T (2.20)
u = (U,W,B, P,Q)T (2.21)√ρv = ℜ[u exp(kx+mz − ωt)] (2.22)
式 (2.15)–(2.19) は行列 M を用いて表すことができる。
Mu = 0 (2.23)
(f2 − ω2)U − kω(P +Q) = 0 (2.24)δωW + (−m+ iµ)Q = 0 (2.25)
ωB + iN2W = 0 (2.26)
−iB + (−m+ iµ)P = 0 (2.27)1
c2sω(P + εQ) = 0 (2.28)
ここで
µ ≡(
1
2− κ)
1
H(2.29)
1
ρ
dρ
dz=
1
ρRT0
∂p
∂z= − 1
H(2.30)
∂
∂z= im− 1
2
1
ρ
dρ
dz=
(im+
1
2H
)(2.31)
∂
∂z− κ
H= im+
(1
2− κ)
1
H= im+ µ (2.32)
(2.33)
10
-
M =
f2 − ω2 0 0 kω kω
0 δω 0 0 −m+ iµ0 iN2 ω 0 0
−k −m− iµ 0 ωc2s
εω
c2s0 0 −i −m+ iµ 0
(2.34)
2.1.3 順圧モード
b = 0とすると,(2.34)は縮退し,その行列式は次のようになる。
detM =
∣∣∣∣∣∣f2 − ω2 kω
−k ωc2s
∣∣∣∣∣∣ (2.35)=ω
c2s(f2 − ω2) + k2ω = 0 (2.36)
各方程式系の分散関係式は次のようになる。
非弾性系,擬非圧縮系 自明な解のみ。ω = 0 (2.37)
完全圧縮系,統一系,準静力学系 コリオリ力で変形された Lamb波。
ω2 = f2 + k2c2s (2.38)
2.1.4 傾圧モード
detM = 0より次の式を得る。
εδω4 − c2s
(δk2 +m2 + µ2 +
N2 + εδf2
c2s
)ω2
+ c2s
[f2
(m2 + µ2 +
N2
c2s
)+ k2N2
]= 0 (2.39)
ω2 の 2次方程式 (2.39)を解くと分散関係式を得る。
ω2 =c2s2
(δk2 +m2 + µ2 +
N2 + εδf2
c2s
)
± c2s
2
(δk2 +m2 + µ2 +
N2 + εδf2
c2s
)2
−4
[f2
(m2 + µ2 +
N2
c2s
)+ k2N2
]}1/2(2.40)
11
-
正の根は音波を表す。
ω2 = c2s
(k2 +m2 + µ2 +
N2 + εδf2
c2s
), δ = ε = 1 (2.41)
負の根は重力波を表す。
ω2 =
f2
(m2 + µ2 +
N2
c2s
)+ k2N2
δk2 +m2 + µ2 +N2 + εδf2
c2s
(2.42)
各方程式系に対する分散関係式は次のようになる。
完全圧縮系 ε = δ = 1とし,下線の項は残す。
ω4 − c2s(k2 +m2 + µ2 +
N2 + f2
c2s
)ω2 + c2s
[f2(m2 + µ2 +
N2
c2s
)+ k2N2
]= 0 (2.43)
統一系 ε = 0, δ = 1とし,下線の項は残す。
ω2 =
f2(m2 + µ2 +
N2
c2s
)+ k2N2
k2 +m2 + µ2 +N2 + f2
c2s
(2.44)
擬非圧縮系 δ = 1とし,下線の項を省略する。
ω2 =f2(m2 + µ2
)+ k2N2
k2 +m2 + µ2(2.45)
非弾性系 δ = 1とし,下線及び二重下線の項を省略する。µ = 1/2H となる。
ω2 =
f2(m2 +
1
4H2
)+ k2N2
k2 +m2 +1
4H2
(2.46)
準静力学系 δ = 0とし,下線の項は保持する。
ω2 =f2(m2 + µ2 +N2/c2s
)+ k2N2
m2 + µ2 +N2 + f2
c2s
(2.47)
12
-
2.1.5 分散関係の図示
分散関係式において,パラメタ Lx, n,H,D, γ, g に具体的な値を与える。
H = 10 km, D = 100 km, g = 9.8m/s (2.48)
Lx =2π
km (2.49)
m =πn
D, n = 1, 5, 10, 20, 40, 80, 160 (2.50)
c2s = γRT0 = γgH = (370m/s)2 (2.51)
µ =
(1
2− κ)
1
H(2.52)
κ =R
cp= 1− 1
γ, γ =
cpcv
=7
5(2.53)
N2 = gd ln θ
dz=gκ
H= 2.8× 10−4 s−1 (2.54)
これらを用いて求めた分散関係を図 2.1に示す。
2.2 準地衡風方程式系
この節では,β 平面上の準地衡風方程式系で静力学平衡を仮定して,ロスビー波の分散関係式を導
出する。
2.2.1 基礎方程式系
f0∂v
∂x=
∂2
∂x2p
ρ(2.55)
∂
∂t
v
x= βv − f0
∂u
∂x(2.56)(
∂
∂z− κH
)p
ρ=θ
θg (2.57)
∂
∂t
θ
θ= − κ
Hw (2.58)
1
c2s
∂
∂t
p
ρ= −
{∂u
∂x+
[∂
∂z+
1
H(κ− 1)
]w
}(2.59)
13
-
(a) (b)
(c) (d)
(e)
図 2.1 f 平面上の分散関係式。(a) 完全圧縮系,(b) 統一系,(c) 擬非圧縮系,(d) 非弾性系, (e)
準静力学系。破線は Lamb波,左上は音波,右下は重力波の分散関係。
14
-
2.2.2 波動解
波動解を仮定する。
v = (u, v, w,p
ρ)T (2.60)
u = (U, V,W,P )T (2.61)√ρv = ℜ[u exp(kx+mz − ωt)] (2.62)
(2.59)–(2.59)に代入すると,次を得る。
ikf0V + k2P = 0 (2.63)
ikf0U + (β + kω)V = 0 (2.64)
kU + (m+ iµ)W − 1c2sωP = 0 (2.65)
κg
HW + ω(m− iµ)P = 0 (2.66)
2.2.3 順圧モード
完全圧縮系,統一系,準静力学系では,順圧ロスビー波の分散関係式は次の式で与えられる。
ω = − kβ
k2 +
(f0cs
)2 (2.67)波数 k → 0のとき ω → 0である。擬非圧縮系及び非弾性系では,下線の項が無いので,
ω = − βk
(2.68)
となる。波数 k → 0のとき ω → −∞となる。
2.2.4 傾圧モード
傾圧ロスビー波の分散関係式は,次のようになる。
ω = − kβ
k2 + f20
[1
c2s+H
κg(m2 + µ2)
] (2.69)モデルの上端の高さ D がスケールハイト H 程度であれば,分母の括弧内の第 2項が支配的で,D
が H の 10倍でも無視できないので,順圧ロスビー波に比べて擬非圧縮系や非弾性系による変形は小
さい。
15
-
(a) (b)
(c)
図 2.2 準地衡風方程式系に対する分散関係式。(a) 完全圧縮系,統一系,準静力学系,(b) 擬非
圧縮系,(c)非弾性系。破線は順圧,実線は傾圧ロスビー波の分散関係。
2.2.5 分散関係の図示
第 2.1.5節と同じパラメタを用いて求めた分散関係を図 2.2に示す。
2.3 まとめ
• 統一系は音波を取り除くが,Lamb波,重力波,ロスビー波を変形しない。• 擬非圧縮系は深い重力波を少し変形し,準静力学系はこれを大きく変形する。• 擬非圧縮系と非弾性系は,波長の長いロスビー波を変形する。
16
-
課題
• 高解像度モデルでは,準静力学系はどのくらいの水平解像度まで用いることができるか。• 擬非圧縮系や非弾性系を全球モデルに用いるとどのような誤差が生じるか。• 音波を取り扱うためには,音波を取り除く方法以外にどのようなものがあるか。• (2.69)を導出せよ。
17
-
講義 3
大気大循環モデルの力学過程
この講義では,大気大循環モデルの力学過程の基礎について学ぶ。偏微分方程式の数値解を得るに
は,時空間的な離散化が必要である。そこで水平方向の離散化,鉛直座標,時間積分法についてにつ
いて概観する。
3.1 水平離散化
大循環モデルの数学的な困難の一つは,球面のトポロジーである。緯度経度座標では,両極で子午
線が交差するため,最も極に近い緯度円での東西格子間隔が短くなり(∆x1 < ∆x2,図 3.1),時間刻
み幅を制約する。時間刻み幅の問題を中心とする,極に関わる問題を「極問題」(pole problem)と
呼ぶ。
3.1.1 球面上の準一様格子
極付近での格子の集中による時間刻み幅の制約を避けるために,様々な格子系が考案されている
(Williamson 2007)。
398 CHAPTER 18. SPHERICAL & CYLINDRICAL GEOMETRY
18.10 The Pole Problem: Spherical Coordinates
The Courant-Friedrichs-Levy criterion for the stability of explicit time-stepping algorithmsis that
△t < △xc
(18.31)
where c is the speed of the fastestwaves allowed by the differential equations being solvedand△x is the smallest spatial grid interval. One reasonwhy nearly-uniform finite differenceor finite elements grids are popular is that △x is roughly the same everywhere so that thetime-step limit is not unduly expensive.
On a sphere, the simplest tactic is to use latitude and longitude as coordinates and applyan even grid spacing in λ and θ. Denoting the radius of the sphere by a, the rub is that thedistance△x between two grid points on a circle of colatitude θ is
△x = a sin(θ)△λ (18.32)
which tends to zero at the poles as shown graphically in Fig. 18.7.
Figure 18.7: A grid with uniform spacing in latitude and longitude as viewed from Polaris,the Pole Star. The meridians (lines of constant longitude) all converge at the pole. Conse-quently, △x → 0 as the pole is approached, even though △λ is constant. The very smallgrid spacing near the pole is the “pole problem”: One must use a very, very short timestep, or the numerical flow will violate the Courant-Friedrichs-Levy criterion and becomeunstable.
The result is that a time step which is stable and reasonable for tropical and temper-ate latitudes — typically 10 minutes for a fully explicit, “primitive equations” numericalweather prediction model — will give instability near the poles. As the run continues, thislocalized instability will gradually spread equatorward like a cancer until the whole globeis consumed with numerical error.
One remedy is an artificially high viscosity near the poles. Heavy damping destroysthe accuracy of the model at high latitudes, but it is known that high latitudes have littlephysical influence on lower latitudes, and few complaints about inaccurate local forecastshave come from polar bears.
The alternative is to attack the root of the problem, which is that, close to the poles, theresolution in longitude is needlessly high. Why use very small△x near the poles when theaccuracy of the model as a whole is constrained by the much poorer resolution everywhere
図 3.1 北極から見た緯度経度座標。λは経度,θ は余緯度。Boyd (2001)
18
-
July 1965
D
Yoshio Kurihara 401
I I \ /
FIGURE 1.-Schematic illustration of System 1 for a quarter of the Northern Hemisphere.
The meridional and zonal increments on the earth are aAe and acose, AX, where a is the radius of the earth. The ratio of the latter to the former is unity if j = N + l . It is between 1 and ~ 1 2 for otherj's; e.g., 3&/4 for O j = 3 O o , 4 for 0,=45', 312 for 8,=60°, and ~ 1 2 for Oj=900. The network of grid points is, therefore, slightly elongated in the zonal direction. However, for a given N , the me- ridional increment is fixed and the latitudinal change of zonal increment is gradual and varies by a factor of only ~ / 2 . Accordingly, the degree of homogeneity of grid density is very high in this new system as compared with other spherical grid systems used so far. Table 1 shows the increments at the'equator, a middle latitude, and the pole for N=20. The corresponding values in the case of a square mesh on a stereographic map are also listed. (In this case, N means the number of equal subdivisions between the pole and the equator on the map.) The necessary number of grid points t,o cover the entire Northern Hemisphere including the equator for various N values on the new grid system and on the stereographic map are shown in table 2.
TABLE 1.-The space increments at the equator, a middle latitude, and the pole. The values for N=2O are shown for the new spherical grid system and a square mesh on a stereographic map
(aAO)X(a cos Oi Mi) Square mesh on New spherical grid stereographic map
& X A v (on the earth) I-
0' v SYSTEM 0
60 * 0 0
FIGURE 2.-The locations of grid points on Systems 1, 2, and 3. The grid point Y (in System 2) and grid point K (in System 3) for the given base point A (in System 1) are shown.
In the following sections, most of the description of the grid system and the scheme of finite differencing will be rnt~de for a quarter of the Northern Hemisphere, from k=Oo to 90'. The results are to be applied to the other quarters and also to the Southern Hemisphere.
TABLE 2.-The number of grid points necessary to cover the Northern Hemisphere including the Equator. N is the resolution
New spherical Square mesh on N 1 grid I stereggrrphic
図 3.2 減少格子 (Kurihara 1965)
図 3.3 両極で接する 2枚の平面から構成される複合格子 (Browning et al. 1989)
Kurihara (1965)もしくは減少格子 極に近づくにつれて東西格子数を減らす。Hortal and Simmons
(1991) がスペクトル変換法を用いたモデルに対して適用し,数値予報モデルで採用されて
いる。
複合(composite)あるいは重合(overset)格子 複数の格子系を組み合わせる。保存性の確保と重
なった部分からのノイズへの対処が課題
• ポーラーステレオ 2枚とメルカトルを組み合わせる (Phillips 1957b)。• ポーラーステレオ 2枚 (Browning et al. 1989; Dudhia and Bresch 2002)。• 緯度経度座標を 90◦ 回転させて 2枚組み合わせる (Kageyama and Sato 2004, 陰陽格子,
) 。
立方体格子 立方体の面を再分割し球面に投影 (Sadourny 1972)。領域モデルを比較的容易に全球に
拡張できる。立方体の辺や頂点の扱いが課題
正二十面体格子 正二十面体の面を再分割し球面に投影 (Sadourny et al. 1968)。NICAM (Tomita
and Satoh 2004)等に採用されている。
19
-
12 A. Staniforth and J. Thuburn
(a) (b) (c)
Figure 6. A Yin-Yang grid: (a) Yin grid (in red), (b) Yang grid (in blue), and (c) Yin-Yang merged grid. (Figures kindly provided by AbdessamadQaddouri.)
In a further development, Dudhia and Bresch (2002)adopted and adapted the Browning et al. (1989) approachto build and demonstrate a global non-hydrostatic modelthat also uses two coupled polar-sterographic grids. Theyconceded that this is sub-optimal from an efficiencyperspective, but argued that they were primarily interestedin extending the domain of an existing regional modelto the entire globe, thereby greatly enhancing the model’sversatility.
3.3.3. Yin-Yang
The most recent overset composite grid to be proposed isthe so-called Yin-Yang grid of Kageyama and Sato (2004),Kageyama (2005), Qaddouri et al. (2008), Li et al. (2008),Baba et al. (2010), Qaddouri (2011), Qaddouri et al. (2011),and Qaddouri and Lee (2011), a variant of which is shownschematically in Figure 6. This is a combination of twolat–lon grids with a small overlap between them. Thegeographical extent of each of these partial lat–lon gridsis a little larger than 90◦ in latitude (with the boundinglatitudes located slightly poleward of ±45◦), and a littlelarger than 270◦ in longitude (with the bounding meridians,located at approximately 0◦ Greenwich, and 270◦ Greenwichin either direction).
The strengths of the Yin-Yang grid are:
1. its two components are traditional, orthogonal,lat–lon grids;
2. there are no singular points;3. the metric factors of each orthogonal coordinate
system are known analytically;4. the grid spacing is quasi-uniform, with a ratio of
maximum to minimum gridlength a little larger than1/ cos (45◦) =
√2 ≈ 1.414;
5. approximately 20–25% fewer points are needed forquasi-uniform resolution than for the traditionallat–lon grid; and
6. existing lat–lon discretisations and codes can beadapted to the Yin-Yang grids.
The main limitations are due to the overlap between the Yinand Yang grids. This causes issues with the coupling betweenthe two grids, particularly with respect to conservation.Mass conservation can be achieved by using a suitable mass-conserving remapping algorithm (Peng et al., 2006), albeit atsome computational cost. However, a priori conservation of
momentum and energy would appear to be very challenging,although a posteriori ‘fixers’ are always possible, e.g. Sasaki(1976)’s variational technique. If a semi-implicit methodis used, then careful consideration needs to be given tochoosing an iterative solution algorithm for the resultingelliptic-boundary-value problem that has an acceptable rateof convergence–e.g. Qaddouri et al. (2008), Loisel et al.(2010) and Qaddouri (2011) give domain-decompositionmethods suited to parallel computer architectures. Anotherconcern is the possibility of decoupling between thesolutions on the two component grids in the overlap region,particularly with the inclusion of physical parametrisationschemes whose output may depend very sensitively on theirinput. For example, deep convection may be triggered onone grid component but not on the other.
3.3.4. Relative efficiency of the three overset composite grids
All other things being equal, the twin polar-sterographicapproach of section 3.3.2 is the least efficient of the threeoverset composite grids, since the ratio of maximum tominimum gridlength is greater than 2. For the Yin-Yangapproach of section 3.3.3, because the bounding latitudesare at approximately ±45◦, this ratio reduces to somewhatgreater than 1/ cos (45◦) =
√2 ≈ 1.414. The most efficient
overset grid, is the one proposed by Phillips (1957), anddiscussed in section 3.3.1, with a ratio of 1.373.
Although the Phillips (1957) grid is most efficient, theYin-Yang grid is almost as efficient. For centres having anexisting lat–lon grid model (with associated data assimilationsystem, postprocessing, etc.), a Yin-Yang grid model can bedeveloped with relatively little modification of existing code,and is therefore an attractive proposition.
3.4. Non-orthogonal quadrilateral grids
A quadrilateral gridding of the sphere can be retained,without resolution clustering or overlaps, by sacrificingorthogonality. By avoiding both resolution clustering andoverlaps, such grids avoid the main barriers to scalability.However, giving up orthogonality makes it significantlymore complicated to obtain the mimetic properties 4–7discussed in the introduction, and typically requires boththe contravariant and covariant velocity components toenter the calculation.
Copyright c⃝ 2011 Royal Meteorological Society andBritish Crown Copyright, the Met Office
Q. J. R. Meteorol. Soc. 138: 1–26 (2012)
図 3.4 陰陽格子 (Staniforth and Thuburn 2012)
FIGURE 1.-A cubic representation of the earth. A cubic grid is shown together with the corresponding spherical grid which fits into the cubic splitting of the sphere, in the exact disposition that was used in the actual computations.
In section 3, we had contiguous faces that proved to be useful in the description of the conservation mechanisms. We shall ask similar properties from the grids II,. Mainly, they should be contiguous in the following sense: if we denote by TInm the intersection between II, and n,, which may be void if TI, and II, are not contiguous, we shall ask that the boundary (in the grid sense) of XI, be exactly the reunion of all TI,, for all m. This means that the grid- points which belong to an edge P,, are common to both grids II, and II, (fig. 1). Then F, and F, do coincide on the grid boundary TI,,, and the intersection between the spherical grids Z n = F n ( I I n ) and Z,=F,(II,) is
z n r n = F n ( ~ n r n ) = F m @ n r n ) - (8)
For the gridpoints which belong to Z,,, we get two dif- ferent finite-difference forms [eq (7)] (one involving F, and gridpoints in II,, another involving F, and the grid- points in TI,) or even more if the gridpoint is a vertex. In these cases, we define the final form [eq ( S ) ] from an equally weighted average of these possible approximations.
We shall be interested only in conservative approxima- tions; by a conservative approximation, we mean that the approximation is such that some discrete forms of the total energy and total geopotential are exactly conserved in the time integration. Discrete approximation of E,, and 4, may be given by the expressions
and
&=CXg4 n.
where the coefficients X are weight coefficients that define t.he discrete form of the space integral. Their sum over II, is the area of P,, but they need not be the same at all points.
In the continuous case, the mechanism of energy con- servation inside P, has been described by eq (4). In fact, we only need the discrete analog of the spatial integral
The second member is the most general bilinear form de- pending only on boundary values. The linear operator B, may be described by a matrix Bf:
with Sy # 0 only when r and s refer to a boundary point. The general solution of eq (9) when the second member is null is any antisymmetric bilinear form & (aA,b) where A, is a linear operator described by any antisymmetric matrix ad where
~ i = ( d s ) r - ~ . N : s * I . N
with aC=-ffsi'. Hence, the general solution of eq (9) is
The splitting property [eq (lo)] ensures that the mechanism of energy conservation holds within II,. In fact, mass conservation also follows from eq (10). To show this, we need only substitute a=l for u=t$+>hu,uk and use the same argument, with the further condition that 6 ( 1 ) / 6 x f = 0 , which is verified, in any case, for a consistent approximation.
The splitting condition [eq (lo)] is indeed Stokes' theorem in finite-difference form. We may then express the time derivative of E,* (respectively 4;). In both cases, it reduces to a discrete approximation of the outgoing flux of energy (respectively geopotential) on the boundary of 11, that depends on boundary values only. That is,
and (11)
These equations are the exact analogs of eq (5). Contrary to what happened in section 1, the fact that the grids are exactly contiguous, expressed by eq ( S ) , together with the invariance properties of the flux form with respect to the mapping, are not sufficient to ensure the exact cancellation of the boundary terms as we sum over n. We need the further condition that the discrete forms of the line integral described by the operator B , be the same on both sides of the boundary.
To meet this condition, it is not sufficient to require that the scheme should be the same in all faces. In fact, the faces meet one another in many ways. In the case of a cube, for instance, a boundary, P,,, may be parallel to the x1 coordinate lines in the square P, and parallel to the x2 coordinate lines in P,. In the case of an icosahedron or any polyhedron with triangular faces, the junction occurs in several ways since the boundaries are parallel to three directions PI, y2, and y". In the case of a cube, the in- variance condition on B , n.ill be verified if the scheme is
February 1972 1 Sadourny 1 139
352
A
MONTHLY WEATHER REVIEW Vol. 96, No. 6
FIGURE 2.-Construction of the grid on a spherical triangle, for n=6.
NORTH POLE
t
4 SOUTH POLE
FIGURE 3.-Representation of the icosahedral-hexagonal grid, for n=6.
We divide the great circle arcs AB and AC into n equal arcs, to give the points B1, . . ., Bn-l, B, (coinciding with B) and Cl, . . ., C, (coinciding with 0. Then we take each great circle arc BiCi and divide it into i equal parts. The distance between adjacent grid points, in any direc- tion, varies by less than 10 percent over the spherical triangle.
If 0 is the center of the sphere, then we have to solve the linear system
n dd OA . OBt=cos{ (i/n)AB), OB. OBi= cos { (1 -i/n)AB},
n A -
-A-
(OA, OB, OBJ=O.
FIGURE 4.-Indexing of a rhombus cell, for n=6.
The third equation expresses the condition that 0, A, B, Bi be coplanar. Here the radius of the sphere is equal to 1, and A 2 is the arc AB measured in radians.
In Cartesian coordinates this system is expressed by
xi+ YAY*+ ~ A Z F a~ 9 xBxi+ Y B y t + z B z t = a B , 1:: Yf Y A +o,
XB Y B
h n where LU,=COS{ (;/..)AB} and aB=cos{ (I-i/n)AB). We solve this system for xt, y t , Zi.
Each point on the face or edge of one of the 20 faces of the icosahedron is now surrounded by six triangles and is therefore in the center of a hexagon. However, the points which form the vertices of the icosahedron are surrounded by only five triangles and therefore these 12 singular points are the centers of pentagons.
As shown in figure 3, the poles were chosen as two pentagonal points. The triangular faces of the icosahedron were arranged into 10 pairs of adjoining faces, forming 10 rhombuses; five around the North Pole and five around the South Pole, indexed from 1 to 10. The grid points inside each rhombus were indexed with two indices (i, j ) , as shown in the example of figure 4. The two Poles, where five rhombuses meet, are treated separately, but with the same finite difference scheme as the other vertices.
For the simplicity of the programming, all the fields were defined in a lOX(n+2)X(n+2) array. The over- lapping simplified the programming on the boundaries
図 3.5 立方体格子 (Sadourny 1972)と正二十面体格子 (Sadourny et al. 1968)
3.1.2 スペクトル変換法
スペクトル変換法は,非線型項及び物理過程の時間変換傾向を物理空間で計算し,線型項や微分な
ど力学過程の時間変換傾向をスペクトル空間で行う手法である。時刻を一つ進めるたびにスペクトル
変換と逆変換が必要になる。
スペクトル変換には,球面調和函数
Y mn (λ, θ) = P̃mn (cos θ)e
imλ (3.1)
を用いる。ここで,mは東西波数で,nは全波数と呼ばれ東西波数と南北波数の和を表す。
P̃mn (cos θ)は正規化されたルジャンドル陪函数
P̃mn (cos θ) =
√2n+ 1
2
(n−m)!(n+m)!
Pmn (cos θ) (3.2)
で,例えば 1に正規化される。 ∫ 1−1
[P̃mn (cos θ)]2d cos θ = 1. (3.3)
正規化されていないルジャンドル陪函数は,ロドリグの公式
Pmn (x) =(−1)n
2nn!(1− x2)m/2 d
n+m
dxn+m(1− x2)n (3.4)
20
-
ここで x = cos θである。
球面調和函数を用いて球面上の函数 f(λ, θ)を展開する。
f(λ, θ) =∞∑
n=0
n∑m=−n
fmn Ymn (λ, θ). (3.5)
展開係数は次のようにして求めることができる。
fmn =
∫ 2π0
∫ π/2−π/2
f(λ, θ)Ym
n (λ, θ) sin θdθdλ (3.6)
m や n を大きく取るほど解像度が高くなる。用いる最大の波数を切断波数(truncation wave
number)と呼ぶ。mの切断波数M と nの切断波数 N とは独立に決めることができるが,球面上で
の解像度が一様になる三角切断M = N が用いられることが多い。
高波数が低波数と区別できずに偽信号(エイリアス)が生じる現象をエイリアシングという。非
線型項でエイリアシングを避けるために必要な格子数は,東西方向に I > 3N + 1,南北方向に
J > (3N + 1)/2である。
実際の計算には,次のような工夫が用いられる。
• フーリエ変換・逆変換には高速フーリエ変換が用いられる。• 東西波数対称性を利用して,m > 0だけを計算する。• ルジャンドル陪函数の赤道対称性を利用して,対称成分と半対称成分に対して半球だけ計算する。
なめらかな函数に対しては,スペクトル法の方が格子点法よりも同じ精度を得るために必要な計算
量は少ない (Browning et al. 1989)。計算量は,切断波数 M のスペクトル法では O(M3),格子数
N×N の格子点法ではO(N2)である。精度は,スペクトル法ではO(e−M ),n次精度の格子点法ではO(N−n) である。同じ精度M = lnN を得るために必要な計算量は,スペクトル法では O[(lnN)3]
で済む。
3.2 様々な鉛直座標
鉛直座標は,物理的な高さ z に限らない。z と 1対 1に対応する様々な変数を鉛直座標として用い
ることができる。まず,合成函数の偏微分の復習から始める。
21
-
402 CHAPTER 18. SPHERICAL & CYLINDRICAL GEOMETRY
Figure 18.8: Schematic of typical spherical harmonics. The “zonal” harmonics have zerozonal wavenumber and their latitudinal structure is that of the ordinary Legendre polyno-mials Pn(cos θ) where θ is colatitude. The “sectoral” harmonics are the modes which haveno latitude circles as nodal lines. The “sectoral” harmonics of high zonal wavenumberare equatorially trapped and have negligible amplitude outside the tropics. The “tesseral”harmonics are the general case.
the equator where it oscillates with many (roughly) equal crests and troughs; outside thisband, Pmn (cos[θ]) simply decays monotonically to zero. (This band is very narrow if n ≈ mandm≫ 1 but extends almost all the way to poles if (n−m) is not small in comparison tom.) For the special case of the so-called “zonal harmonics”, m = 0, the band of oscillationsis global and the high latitude “decay zones” do not exist. Fig. 18.8 schematically illustratestypical spherical harmonics.
18.12 Legendre Transforms and Other Sorrows
18.12.1 FFT in Longitude/MMT in Latitude
In longitude, spherical harmonics are just a Fourier series. The optimum longitudinal gridis therefore evenly spaced. Since two-dimensional transforms are most efficiently per-formed as a nested sequence of one-dimensional partial sums or transforms, irregardless ofhow these one-dimensional sums are evaluated, the longitudinal partial sums are invari-ably evaluated via the FFT. In latitude, however, it is necessary to use Gaussian quadrature,which is slower [O(N2) versus O(N log2 N)].
図 3.6 典型的なルジャンドル陪函数の例。帯状(zonal, m = 0),扇形(sectorial, m = n),細
片状(tesseral, m ̸= 0, n ̸= m)。Boyd (2001)
3.2.1 合成函数の偏微分
f = f(x, y), x = x(u, v), y = y(u, v) がいずれも u, v に関して偏微分可能であれば,合成函数
f = f((φ(u, v), ψ(u, v))は,u, v に関して偏微分可能で,
∂f
∂u
∣∣∣∣v
=∂f
∂x
∣∣∣∣y
∂x
∂u
∣∣∣∣v
+∂f
∂y
∣∣∣∣x
∂y
∂u
∣∣∣∣v
, (3.7)
∂f
∂v
∣∣∣∣u
=∂f
∂x
∣∣∣∣y
∂x
∂v
∣∣∣∣u
+∂f
∂y
∣∣∣∣x
∂y
∂v
∣∣∣∣u
(3.8)
と書ける。今,x = u, v = s即ち y = z(x, s)の場合を考えると,
∂f
∂u
∣∣∣∣s
=∂f
∂u
∣∣∣∣z
+∂f
∂z
∣∣∣∣u
∂z
∂u
∣∣∣∣s
, (3.9)
∂f
∂s
∣∣∣∣u
=∂f
∂z
∣∣∣∣u
∂z
∂s
∣∣∣∣u
(3.10)
となる。
22
-
3.2.2 一般化鉛直座標
Kasahara (1974)に基づいて,一般化された鉛直座標を導入する。(3.10)を用いて,(3.9)を書き換
えると,∂f
∂u
∣∣∣∣s
=∂f
∂u
∣∣∣∣z
+∂s
∂z
∣∣∣∣u
∂z
∂u
∣∣∣∣s
∂f
∂s
∣∣∣∣u
(3.11)
と書ける。uを水平座標 x, y や時刻 tと見なすと,(∂f
∂t
)s
=
(∂f
∂t
)z
+∂s
∂z
(∂z
∂t
)s
∂f
∂s, (3.12)
∇sf = ∇zf +∂s
∂z∇sz
∂f
∂s(3.13)
と書ける。これらを使うと d/dtは,
d
dt≡(∂
∂t
)s
+ v · ∇s + ṡ∂
∂s(3.14)
と表すことができる。ここで,
ṡ ≡ dsdt
=∂s
∂z
[w −
(∂z
∂t
)s
− v · ∇sz]
(3.15)
である。sは,一般化された鉛直座標,ṡは一般化された鉛直速度である。
s座標で静力学平衡は∂p
∂s= −mg (3.16)
となる。ここで
m ≡ ρ∂z∂s
(3.17)
である。
(3.13), (3.14),摩擦がないときの水平の運動方程式は,
dv
dt+ fk × v = −1
ρ∇sp+
1
m∇sz
∂p
∂s(3.18)
(3.16)を用いると,dv
dt+ fk × v = −1
ρ∇sp− g∇sz (3.19)
と書ける。
また,連続の式は∂m
∂t+∇s · (mv) +
∂
∂s(mṡ) = 0 (3.20)
(3.16)を用いると∂
∂t
(∂p
∂s
)+∇s ·
(v∂p
∂s
)+
∂
∂s
(ṡ∂p
∂s
)= 0 (3.21)
と変形される。熱力学の式は全微分で表されるので,形は変わらない。ただし,全微分は (3.14)で表
される。
23
-
3.2.3 気圧座標
運動方程式dv
dt+ fk × v = −g∇z (3.22)
ここでd
dt=
∂
∂t+ v · ∇+ ω ∂
∂p, ω ≡ dp
dt(3.23)
静力学平衡
g∂z
∂p= −α, α ≡ 1
ρ(3.24)
連続の式
∇ · v + ∂ω∂p
= 0 (3.25)
熱力学の式d ln θ
dt=
Q̇
cpT(3.26)
3.2.4 σ 座標
p 座標では,p > ps での値は欠損となり,差分やスペクトル変換に都合が悪い。これを回避する
には,σ =
p
ps(3.27)
を鉛直座標に用いればよい (Phillips 1957a)。σ 面は地形に沿ったものとなる。
運動方程式dv
dt+ fk × v = −g∇z −RT∇ ln ps (3.28)
ここでd
dt=
∂
∂t+ v · ∇+ σ̇ ∂
∂σ, σ̇ ≡ dσ
dt(3.29)
静力学平衡
g∂z
∂ lnσ= −RT (3.30)
連続の式∂ps∂t
+∇ · psv + ps∂σ̇
∂σ= 0 (3.31)
σ 座標では,山岳の上空でも σ 面が山岳に沿って p や z に対して凸凹している。数値予報モデル
では,地表付近では σ,上空で p となるようなハイブリッド座標がよく用いられる (Arakawa and
Lamb 1977; Simmons and Burridge 1981)。
24
-
(a) (b) (c) (d)
図 3.7 34.7Nにおけるモデル面の経度–気圧断面図。(a) σ座標,(b) Arakawa and Lamb (1977)
(c) Simmons and Burridge (1981), (d) Eckermann et al. (2004)のハイブリッド座標。AFES
T119L48を用いたシミュレーションの 1月の月平均海面気圧から計算
3.3 時間積分法
3.3.1 リープフロッグ法
数値予報モデルでは,時間積分法に時間方向に中央差分したリープフロッグ法
fn+1 = fn−1 + 2∆tFn (3.32)
がよく用いられる。ここで nは n番目の時刻
tn = n∆t (3.33)
に対応することを表す。リープフロッグ法は 2 次精度であるが,計算モードが内在している。次の
フィルタを用いると,計算モードを取り除いて安定的に積分できる (Robert 1966; Asselin 1972)。
F̂n = Fn +ν
2
[F̂n−1 − 2Fn + Fn+1
](3.34)
ここで ˆはフィルタを適用したことを表し,ν はフィルタのパラメタで 0.01から 0.2が用いられる。
3.3.2 セミ・インプリシット法
講義 2で詳しく見たように,時間刻み幅 ∆tは速い波により規定される。静力学平衡を仮定し,鉛
直に伝播する音波を除去したプリミティブ系でも重力波が存在するため,重力波の位相速度が ∆tを
決める。重力に関する項を陰的に解くことで,大きな∆tでも安定的な積分を可能にする方法がセミ・
インプリシット法である。
25
-
(a) (b)
1 2
34
図 3.8 (a) 準 3次内挿 (Ritchie et al. 1995)と (b) 双 3次内挿 (Enomoto 2008)
3.3.3 セミ・ラグランジュ法
オイラー法では,式 (3.32)を積分する。これに対し,セミ・ラグランジュ法では
f(g, t+∆t) = f(r, t) (3.35)
を積分する。ここで g は格子点であるが,出発点 r は必ずしも格子上にあるとは限らないので,内挿
して求める必要がある。
課題
式 (3.28)–(3.31)を導出せよ。
26
-
講義 4
気象データ同化の基礎
この講義では,Kalnay (2003) に従い,2 つの例題を通じてデータ同化の基礎的な概念について
学ぶ。
4.1 データ同化とは何か
図 4.1に観測データの同化の概念図を示す。数値天気予報(numerical weather prediction)の初期
値としては,規則的な格子上のデータが必要である。観測データは初期値の格子上で取得されたとは
限らず,取得された時刻も様々で,観測される変数,観測点の分布,測器の精度も多様である。観測
データ(observation)を数値予報モデルに取り込むことをデータ同化(data assimilation)という。
客観的な一定の方法に従って,最適(optimal)な場を推定したものを客観解析(objective analysis)
という。
データ同化は,時空間的に不均一な観測データを空間内挿したものとは異なる。単なる空間内挿値
は,大気の運動を支配する物理法則には必ずしも整合的ではなく,最適ではない。物理法則にも整合
的な推定値を得るために,観測だけでなくモデルによる予測である第一推定値(first guess)が用い
られる。予測を下敷きにして観測で修正し,観測にも近く物理法則にも整合的な最適な値を推定す
る。データ同化は,通常第一推定値と様々な観測データの重み付き平均をとり大気の状態を推定して
いる。得られた推定値を解析値(analysis)と呼ぶ。
4.2 データ同化の簡単な例題
データ同化手法は,統計的推論を基礎としている。ここで考える例題は,2つの気温の測定値 T1, T2
から解析値 Ta を求める問題を考える。真の値(truth)を Tt とすると,測定値は
T1 = Tt + ε1 (4.1)
T2 = Tt + ε2 (4.2)
と書ける。ここで ε1, ε2 は誤差を表す。真の値が分らないので,誤差(error)も分らない。さらに,
以下が仮定できるとする。
27
-
図 4.1 観測データの同化の概念図。観測点は■,モデルの格子点は⃝,円形の陰影は格子点(◎)に対して観測が影響する範囲。Kalnay (2003)を一部改変
• バイアスがない。E(ε1) = E(ε2) = 0 (4.3)
ここで, E( )は期待値を表します。期待値とは,確率の重み付き平均値のことである。
• 誤差の分散は既知。E(ε21) = σ
21 , E(ε
22) = σ
22 (4.4)
• 誤差は無相関。E(ε1ε2) = 0 (4.5)
Ta = a1T1 + a2T2 (4.6)
解析誤差もバイアスがないE(εa) = 0 (4.7)
とすると,a1 + a2 = 1 (4.8)
となる。
4.2.1 最小二乗法
最小二乗法(method of least squares)では,平均二乗誤差が最も小さくなるようにする。
σ2a = E[(Ta − Tt)2]= a21σ
21 + (1− a1)2σ22 (4.9)
28
-
微分をとると∂σ2a∂a1
= 2a1σ21 − 2(1− a1)σ22 (4.10)
となる。最小値では微分が 0になるので,
a1 =σ22
σ21 + σ22
, a2 =σ21
σ21 + σ22
(4.11)
と求まる。観測 1の重みは,観測 2の分散を分散の和で割ったものとして求まる。分子分母に 1/σ21σ22
をかけると,
a1 =1/σ21
1/σ21 + 1/σ22
, a2 =1/σ22
1/σ21 + 1/σ22
(4.12)
とも書ける。ばらつき(分散)が大きいほど小さくなるので,分散の逆数は精度を示す。(4.12) は,
重みが精度に比例することを示す。分散が小さいものに,より大きな重みをつけることになる。
(4.9)に (4.11)を代入して,解析値の分散を求めてみる。
σ2a =σ21σ
22
σ21 + σ22
(4.13)
1
σ2a=
1
σ21+
1
σ22(4.14)
(4.14)は,解析精度は全ての精度の和となる。
測定値 1が第一推定値(T1 = Tb)測定値 2が観測値(T2 = To)であるとする。(4.6)は
Ta = Tb +σ2b
σ2b + σ2o
(To − Tb) (4.15)
と書くこともできる。To − Tb をイノベーション(innovation),右辺第二項を解析インクリメント(increment)と呼ぶ。予測精度が悪い場合(σ2b が大きい場合)や第一推定値が観測値からずれている
場合(インクリメントが大きい場合),(4.15)の第 2項が大きくなり,観測に近くなるように修正さ
れる。
4.2.2 最尤法
ここでは,T1, T2 の確率密度分布から最適な推定値を求めてみる。T1, T2 の確率密度分布は正規分
布で表すことができる。
p(T1|T ) =1√2πσ1
exp
[− (T1 − T )
2
2σ21
](4.16)
p(T2|T ) =1√2πσ2
exp
[− (T2 − T )
2
2σ22
](4.17)
測定値が T1, T2 となる確率は,(4.16)と (4.17)との積で表すことができる。
L(T |T1, T2) =1
2πσ1σ2exp
[− (T1 − T )
2
2σ21− (T2 − T )
2
2σ22
](4.18)
29
-
図 4.2 2次元の場合のベイズの定理を示す概念図 (Rodgers 2000)。
L( )を尤度函数(likelihood function)と言います。T の尤もらしい値は,L(T |T1, T2)が最大になる値である。指数函数の引数に負号をかけた値
J(T ) =1
2
[(T1 − T )2
σ21+
(T2 − T )2
σ22
](4.19)
が最小になれば,L(T |T1, T2)の最大値が求まる。J( )をコスト函数(cost function)と呼ぶ。このような推定法を最尤法(maximum likelihood method)と言う。∂J/∂T = 0を計算すると,最尤法
により求めた重みは最小二乗法で求めた重みと一致する。ただし,正規分布に従わない場合はこの限
りではない。
4.2.3 ベイズの定理
ベイズの定理は以下の式で表される。
p(x|y) = p(y|x)p(x)p(y)
(4.20)
p(·)は,それぞれ以下の確率密度函数(Probability Density Function, PDF)を意味する。
p(x) 場 xの先験(観測を行う前の)PDF
p(y) 観測 y の先験(観測を行う前の)PDF
p(y|x) 場 xが与えられたときの観測 y の条件付 PDFp(x|y) 場 y が与えられたときの観測 xの条件付 PDF
2次元の場合の PDFの関係を示す概念図を図 4.2に示す。
30
-
4.3 リモートセンシングの簡単な例題
ここでは,リモートセンシングデータを同化する場合について考える。気温の代わりに遠隔測定さ
れた放射輝度 y = h(T )が得られているとする。h( )を観測演算子(observation operator)呼ぶ。観
測演算子は,気温から放射輝度のような変数変換だけでなく,空間内挿も含む。
気温の第一推定値は Tb,予報誤差は εb で表すことにする。放射輝度の観測値は,yo = h(Tt) + εo
と表すことができる。εo は観測誤差でま,観測誤差と予報誤差は正規分布に従うと仮定する。イノ
ベーションを誤差で表すとyo − h(Tb) = εo −Hεb (4.21)
となる。ここで
H =∂h
∂T(4.22)
である。
4.3.1 最小二乗法
(4.15)の形式で解析値 Ta を表すと
Ta = Tb + w(yo − h(Tb)) = Tb + w(εo −Hεb) (4.23)
となる。すなわち,解析誤差はεa = εb + w(εo −Hεb) (4.24)
解析値の分散はσ2a = σ
2b + w
2(σ2o + σ2bH
2)− 2wσ2bH (4.25)
となる。w で微分して最適な重みを求めると
w = σ2bH(σ2o + σ
2bH
2)−1 (4.26)
となる。H でスケールされた重み
wH =σ2bH
2
σ2o + σ2bH
2=
H2/σ2o1/σ2b +H
2/σ2o(4.27)
は 0 と 1 の間の値を取る。観測の分散が大きい(σ2o ≫ σ2bH2)とき,解析値は第一推定値にほぼ等しくなる(Ta ≈ Tb)。逆に予測の分散が大きい(σ2bH2 ≫ σ2o)とき,解析値は観測値に近づく(Ta ≈ wyo)。(4.26)を (4.25)に代入すると
σ2a = (1− wH)σ2b (4.28)
が得られる。また,1
σ2a=
1
σ2b+H2
σ2o(4.29)
と表すこともできる。この場合でも,解析精度は第一推定値の精度と観測の精度との和で表される。
31
-
4.3.2 最尤法
観測演算子を含む場合のコスト函数は,
J(T ) =1
2
[(Tb − T )2
σ2b+
(yo − h(T ))2
σ2o
](4.30)
で表すことができる。
4.4 接線型モデルと随伴モデル
大気の状態が
x =
x1x2...xn
(4.31)と n個の自由度で表されるとする。自由度 nは,風や気温など状態変数の種類 ×格子点数で表される。微分方程式の解を表す x(t)(時刻 tでの大気の状態)は,非線型モデルの時間積分を表すM( )
を用いて初期条件(initial condition)x(t0)で次のように表すことができる。
x(t) =M [x(t0)] (4.32)
微小擾乱 δx(t)を加えて,解 x(t)を少しずらしてみる。
x(t) + δx(t) =M [x(t0) + δx(t0)] (4.33)
xの周りでテイラー展開するとδx(t) = L(x(t))δx(t0) (4.34)
となる。ここで
L =∂M
∂x(4.35)
を接線型モデル(tangent linear model)と呼ぶ。今 t0 < t1 < tである時刻 t1 を考える。
L(t0, t) = L(t1, t)L(t0, t1) (4.36)
と t0 から t1 までと t1 から tまでの積で表すことができる。ここで右辺の 2つの行列のうち,右から
作用させていくことに注意して下さい。両辺の随伴(共役転置)をとると
[L(t0, t)]T = [L(t0, t1)]
T[L(t1, t)]T (4.37)
となる。ここでは実行列を考えているので随伴は単なる転置となる。LT を随伴モデルと呼ぶ。(4.37)
の右辺は,随伴モデルが時刻 tから時間を遡っていく作用をすることを示す。随伴モデルは,カルマ
ンフィルタや 4次元変分法と言った高度な同化手法で利用されている。
32
-
4.5 様々なデータ同化手法
ここでは主要な手法の基本的な考え方について紹介する。
4.5.1 最適内挿法
最適内挿法(OI, optimum interpolation)は,最小二乗法に基づいている。第 4.3.1節の例では一
つの変数について考えたが,多次元に拡張する。自由度が n,観測数がmだとすると,(4.23)は次の
ように書ける。
xai = xbi +
m∑j=1
wij(yj −Hjixbi )) (4.38)
ベクトルで表記するとxa = xb +W(y − Hxb) (4.39)
となる。ここで観測演算子を表す行列は
H =∂h
∂x(4.40)
である。式 (4.39)は,解析が逐次的に行われるので逐次法(sequential method)と呼ばれる。最適内
挿法では最適な重みはW = BHT(R+ HBHT)−1 (4.41)
となる。この式は(4.26)に対応している。Bと Rは,それぞれ第一推定値と観測の誤差共分散行列
(error covariance matrix)を表す。Bは背景(background)誤差共分散や予報(forecast)誤差共分
散とも呼ばれ,最適内挿法では前もって統計的に調べておいて与える。解析誤差共分散行列 Pa は
Pa = (I−WH)B (4.42)
または(Pa)−1 = B−1 + HTR−1H (4.43)
(4.42), (4.43)はそれぞれ (4.28), (4.29)に対応しており,解析精度は第一推定値の精度と観測の精度
との和で表される。
かつては数値天気予報の初期値作成に盛んに用いられ ERA-15にも使われたが,最近はあまり大気
の解析には用いられていない。しかし,陸面の解析には 2次元の OIを使い,大気の解析手法とは別
にしているものもある (Onogi et al. 2007; Dee et al. 2011)。
4.5.2 3次元変分法
3 次元変分法(3DVar, three-dimensional variational method)は,最尤法に基づいている。第
4.3.2節のコスト函数を多次元に拡張すると
J(x) =1
2(x− xb)TB−1(x− xb) + 1
2[h(x)− y]T R−1 [h(x)− y] (4.44)
33
-
となる。3次元変分法では,コスト函数の最小値を繰り返し計算により数値的に求める。その際,コ
スト函数の勾配∇J(x) = B−1(x− xb) + HTR−1
[H(xb)− y
](4.45)
を使う。∇J(x) = 0を与える xが J の最小値となり,解析値が決まる。観測演算子が線型の場合は,解析値や解析誤差共分散は,最適内挿法で求めたものと一致する。
3次元変分法の特長は,非線型の観測演算子が使えることである。3次元変分法を用いれば,リト
リーバルデータを用いずに直接同化が可能である。
4.5.3 4次元変分法
3 次元変分法では,解析時刻(頃)の観測データのみを用いた。4 次元変分法(4DVar, four-
dimensional variational method)では,時刻の異なるデータを取り込むことがでる。コスト函数は
次のようになる。
J(x0) =1
2(x0 − xb0)TB−10 (x0 − xb0) +
1
2
N∑i=0
[h(xi)− yi]T R−1i [h(xi)− yi] (4.46)
下添字は時刻のステップ(i = 0, 1, · · · , N)を表す。コスト函数の勾配は
∇J(x) = B−10 (x0 − xb0) +N∑i=0
[L(ti, t0)]THTR−1
{H[M(xb0)
]− y
}(4.47)
(4.47)の背景誤差共分散に関する右辺第 1項は,3次元変分法と同じである。右辺第 2項の { }はモデルを時間の前方に積分して観測からのずれを計算している。残りの部分で,随伴モデル LT(ti, t0)
により時間を遡る方向に誤差を伝播させている。
4.5.4 アンサンブル・カルマンフィルタ
アンサンブル・カルマンフィルタ(EnKF, ensemble Kalman filter)は,最適内挿法のような逐次
データ同化手法の一つである。アンサンブル予報を用いて予報誤差共分散を時間的に発展させる。
Pf ≈ 1K − 1
K∑k=1
(xfk − xf )(xfk − x
f )T (4.48)
ここでK はアンサンブル数である。予報誤差共分散を解析誤差共分散を時間発展させて計算すると
Pf = LPaLT (4.49)
となる。簡単なモデルでは右辺を計算することがでるが,大気大循環モデルの自由度は n = O(106)
ですので実用的ではない。カルマンフィルタで重みは,カルマンゲイン(Kalman gain)と呼ばれて
いるが,OIの (4.41)と同じである。
34
-
データセット名 予報モデルの解像度 データ同化手法 参考文献
NCEP/NCAR (R1, CDAS) T62L28 3DVar Kalnay et al. (1996)
NCEP/DOE (R2) T62L28 3DVar Kanamitsu et al. (2002)
CFSR T382L64, 1/2◦×1/4◦–1/2◦ 3DVar Saha et al. (2010)MERRA 2/3◦×1/2◦L72 3DVar Rienecker et al. (2011)ERA-15 T106L31 OI Gibson and Uppala (1996)
ERA-40 TL159L60 3DVar Uppala et al. (2005)
ERA-Interim TL255L60 4DVar Dee et al. (2011)
JRA-25 (JCDAS) T106L40 3DVar Onogi et al. (2007)
JRA-55 TL319L60 4DVar Kobayashi et al. (2015)
表 4.1 主要な長期再解析データセット. 解像度で T62は 1.875◦,T106及び TL159は 1.125◦,
TL255 は 0.703125◦,T382は 0.3125◦ に相当する。Lは鉛直層数。3DVar, 4DVarはそれぞれ
3次元及び 4次元変分法を,OIは最適内挿法を指す。
4.6 再解析
客観解析は毎日の数値天気予報のために作られるが,データが蓄積してくると長い期間の変動を調
べてみようという需要が生まれる。今年の低気圧の活動は去年と比べてどうだろうか,梅雨前線の活
動は年によってどのように変動しているのか,というようなことを調べてみたくなる。残念ながら,
客観解析はこのような用途にはあまり向いていない。気象庁のような予報現業機関では,数値天気予
報をより正確にするために,予報解析システムを常に見直している。そのため,データの品質が一定
していない。
再解析データは,ある時点で固定された予報解析システムを使って,過去にさかのぼって解析をや
り直したものである。そのため,気候変動について調べるためには,より適したデータということが
言える。なお,仮に再解析の作成中に,予報解析システムがよくなっていたとしても,システムは更
新しない。
気候変動には,数年スケールのものもあれば,もっと長い十年スケールのものもある。より長
いデータを用いると,様々な時間スケールの変動を調べることができる。世界で最初の再解析は,
NCEP/NCAR再解析 (Kalnay et al. 1996)である。1948年から作成され,現在も継続されている。
その後主要な予報現業機関や研究機関で様々なデータセットが作成されている。主要なものを表 4.1
に示す。
4.7 観測データ
再解析データに使われるデータの量は,膨大です。観測数は年々増加しており, ERA-Interimでは
1989 年に 1 日あたり 106 だったものが 2010 年には 1 日あたり 107 に増加した (Dee et al. 2011)。
35
-
地上 海上(船舶,ブイ)
高層 航空機
衛星風 極軌道衛星
図 4.3 NCEPがまとめたPREPBUFRに含まれる 2008年 1月 1日 1200 UTCの観測。UCAR
にアーカイブされているデータから作成
観測データには,大きく分けて従来型(conventional)観測データとリモートセンシング(remote
sensing)データの 2種類がある。
4.7.1 従来型観測データ
従来型観測データは,気温等の変数を直接に現場(in-situ)で観測したものである。アメダスなど
自動気象観測装置や気象台での気象観測は,地上の従来型観測データである。海上のデータは,船舶
やブイから通報される。上空の観測は,ラジオゾンデや航空機で取得される。従来型観測データは地
上観測の数が多く,海上では航路やブイの設置されている海域に偏っている。
36
-
4.7.2 リモートセンシングデータ
リモートセンシングデータは,衛星や地上に設置されたセンサにより取得され,現場に行かずに遠
隔測定できることが特長である。衛星データは広範囲を測定できるため,直接観測の少ない海上では
貴重なデータである。衛星データは水平 2次元のデータが主だが,鉛直分布を取得することを目的と
するデータもある。リモートセンシングデータを利用するためには,バイアス補正が不可欠である。
気象要素に依存した量を測定するので,気象要素の情報は間接的に含まれることになる。気象要素に
変換したデータ(リトリーバル)をデータ同化に用いたり,直接同化されたりしている。
4.7.3 品質管理
観測データは,全てを使うわけではない。まず,データが信頼できるか確認する。これを品質管理
(Quality Control, QC)という。QCは独立したプログラムで行われたり,データ同化の中で行われ
たりする。例えば,気候値から大きく外れているもの,船舶や航空機観測では航路から突然外れたも
のは,測定や通報時のミスである可能性が高いと考えることができる。予報現業機関では問題のある
データをできる限り修正するということも行っている。単純なエラーチェック手法として,予測値と
比較するグロスエラーチェック(gross error check)がある。
課題
Tb = 2.0◦C, σb = 2.0
◦Cという第一推定値と予報誤差の標準偏差を得たとする。
■問 1
(1) To = 0.0◦C, σo = 1.0
◦Cのとき,Ta と σa を求めよ。答: Ta = 0.40◦C, σa =√4/5 ≈ 0.89◦C
(2) To = 0.0◦C, σo = 2.0
◦Cのとき,Ta と σa を求めよ。答: Ta = 1.0◦C, σa =√2 ≈ 1.4◦C
■問 2
(1) 観測演算子が y = 2T , yo = 0, σo = 2 のとき, Ta と σa を求めよ。答: Ta = 0.40◦C, σa =√4/5 ≈ 0.89◦C
(2) 観測演算子が y = σT 4 で y = σT 4, yo = 315Wm−2, σo = 5Wm−2 のとき, Ta と σa を求め
よ。ただし,σ は Stephan-Boltzman 定数 σ = 5.67 × 10−8Wm−2K−4, 観測演算子の T の単位は K とし,0◦C≈ 273K とする。H = ∂h/∂T は Tb での値を用いること。答: Ta = 0.46◦C,σa ≈ 0.94◦C
37
-
参考文献
Arakawa, A. and C. S. Konor, 2009: Unification of the anelastic and quasi-hydrostatic systems
of equations. Mon. Wea. Rev., 137, 710–726.
Arakawa, A. and V. R. Lamb, 1977: Computational design of the basic dynamical processes
of the UCLA general circulation model. Methods in Computational Physics, J. Chang, Ed.,
Academic Press, Vol. 17, 173–265.
Asselin, R., 1972: Frequency filter for time integrations. Mon. Wea. Rev., 100, 487–490.
Bjerknes, V., 1904: Das Problem der Wettervorhersage, betrachtet von Standpunkte der
Mechanik und der Physik (the problem of weather prediction, considered from the viewpoints
of mechanics and physics). Meteorol. Z., 21, 1–7. (translated and edited by Volken E. and S.
Brönninmann, 2009: – Meteorol. Z. 18, 663–667).
Boyd, J. P., 2001: Chebyshev and Fourier spectral methods. second edition (revised) ed., Dover,
668 pp.
Browning, G. L., J. J. Hack, and P. N. Swarztrauber, 1989: A comparison of three numerical
methods for solving differential equations on the sphere. Mon. Wea. Rev., 117, 1058–1075.
Charney, J. G., R. Fjörtoft, and J. Von Neumann, 1950: Numerical integration of the barotropic
vorticity equation. Tellus, 2, 267–284.
Dee, D. P., et al., 2011: The ERA-Interim reanalysis: configuration and performance of the data
assimilation system. Quart. J. Roy. Meteor. Soc., 137, 553–597.
Dudhia, J. and J. F. Bresch, 2002: A global version of the PSU-NCAR mesoscale model. Mon.
Wea. Rev., 130, 2989–3007.
Durran, D. R., 1989: Improving the anelastic approximation. J. Atmos. Sci., 46, 1453–1461.
Eckermann, S. D., J. P. McCormack, L. Coy, D. Allen, T. F. Hogan, and Y.-J. Kim, 2004:
NOGAPS-ALPHA: A prototype high-altitude version of the Navy’s global numerical wather
prediction model. Prepreints, Symp on the 50th Anniversary of Operational Numerical Weather
Prediction, NCEP and cosponsers, College Park, MD, chap. P2.6.
Enomoto, T., 2008: Bicubic interpolation with spectral derivatives. SOLA, 4, 5–8.
Gibson, R. and P. K. Uppala, 1996: The ECMWF Re-Analysis (ERA) project, Shinfield Park,
Reading RG2 9AX, United Kingdom. European Centre for Midium-Range Weather Forecasts,
No. 73 in ECMWF Newsletter.
38
-
Hirota, I. and T. Hirooka, 1984: Normal mode Rossby waves observed in the upper stratosphere.
part I: first symmetric modes of zonal wavenumbers 1 and 2. J. Atmos. Sci., 41, 1253–1267.
Hortal, M. and A. J. Simmons, 1991: Use of reduced Gaussian grids in spectral models. Mon.
Wea. Rev., 119, 1057–1074.
Kageyama, A. and T. Sato, 2004: “yin-yang grid”:an overset grid in spherical geometry.Geochem.
Geophys. Geosyst., 5, Q09005.
Kalnay, E., 2003: Atmospheric modeling, data assimilation and predictability. Cambridge Uni-
versity Press, Cambridge, UK, 341 pp.
Kalnay, E., et al., 1996: The NCEP/NCAR 40-year reanalysis project. Bull. Amer. Meteor. Soc.,
77, 437–471.
Kanamitsu, M., W. Ebisuzaki, J. Woollen, S.-K. Yang, J. J. Hnilo, M. Fiorino, and G. L. Potter,
2002: NCEP–DOE AMIP-II reanalysis (R-2). Bull. Amer. Meteor. Soc., 83, 1631–1643.
Kasahara, A., 1974: Various vertical coordinate systems used for numerical weather prediction.
Mon. Wea. Rev., 102, 509–522.
Kobayashi, S., et al., 2015: The JRA-55 reanalysis: general specifications and basic characteris-
tics. J. Meteor. Soc. Japan, 93, 5–48.
Kurihara, Y., 1965: Numerical integration of the primitive equations on a spherical grid. Mon.
Wea. Rev., 93, 399–415.
Lynch, P., 1992: Richardson’s barotropic forecast: a reappraisal. Bull. Amer. Meteor. Soc., 73,
35–47.
Lynch, P., 2000: Weather foreasting: from woolly art to solid science. Meteorology at the Mil-
lennium, U. R. Pearce, The Royal Meteorological Society, Ed., Academic Press, International
Geophysics, Vol. 83, 106–109.
Lynch, P., 2008: The ENIAC forecasts: a re-creation. Bull. Amer. Meteor. Soc., 89, 45–55.
Ogura, Y. and N. A. Phillips, 1962: Scale analysis of deep and shallow convection in the atmo-
sphere. J. Atmos. Sci., 19, 173–179.
Onogi, K., et al., 2007: The JRA-25 reanalysis. J. Meteor. Soc. Japan, 85, 369–432.
Phillips, N. A., 1957a: A coordinate system having some special advantages for numerical fore-
casting. J. Meteor., 14, 184–185.
Phillips, N. A., 1957b: A map projection system suitable for large-scale numerical weather
prediction. J. Meteor. Soc. Japan, 35A, 262–267.
Rienecker, M. M., et al., 2011: MERRA: NASA’s Modern-Era Retrospective Analysis for Re-
search and Applications. J. Climate, 24, 3624–3648.
Ritchie, H., C. Temperton, A. Simmons, M. Hortal, T. Davies, D. Dent, and M. Hamrud, 1995:
Implementation of the semi-Lagrangian method in a high-resolution version of the ECMWF
forecast model. Mon. Wea. Rev., 123, 489–514.
Robert, A. J., 1966: The integration of a low order spectral form of the primitive meteorological
39
-
equations. J. Meteor. Soc. Japan, 44, 237–245.
Rodgers, C. D., 2000: Inverse methods for atmospheric sounding: theory and practice, Series on
atmospheric, oceanic and planetary physics, Vol. 2. World Scientific, Singapore, 240 pp.
Sadourny, R., 1972: Conservative finite-difference approximations of primitive equations on
quasi-uniform spherical grids. Mon. Wea. Rev., 100, 136–144.
Sadourny, R., A. Arakawa, and Y. Mintz, 1968: Integration of the nondivergent barotropic
vorticity equation with an icosahedral-hexagonal grid for the sphere. Mon. Wea. Rev., 96,
351–356.
Saha, S., et al., 2010: The NCEP Climate Forecast System Reanalysis. Bull. Amer. Meteor.
Soc., 91, 1015–1057.
Simmons, A. J. and D. M. Burridge, 1981: An energy and angular-momentum conserving vertical
finite-difference scheme and hybrid vertical coordinates. Mon. Wea. Rev., 109, 758–766.
Staniforth, A. and J. Thuburn, 2012: Horizontal grids for global weather and climate predition
models: review. Quart. J. Roy. Meteor. Soc., 138, 1–26.
Tomita, H. and M. Satoh, 2004: A new dynamical framework of nonhydrostatic global model
using the icosahedral grid. Fluid Dyn. Res., 34, 357–400.
Uppala, S. M., et al., 2005: The ERA-40 re-analysis. Quart. J. Roy. Meteor. Soc., 131, 2961–
3012.
Williamson, D. L., 2007: The evolution of dynamical cores for global atmospheric models. J.
Meteor. Soc. Japan, 85B, 241–269.
40