O SCILLATIONS LIBRES DES SYSTÈMES À DEUX DEGRÉS DE LIBERTÉ 1 A Zouine EMG 2eme Prépa.
23
OSCILLATIONS LIBRES DES SYSTÈMES À DEUX DEGRÉS DE LIBERTÉ 1 A Z o u i n e EMG 2eme Prépa
-
Upload
moise-pelissier -
Category
Documents
-
view
106 -
download
1
Transcript of O SCILLATIONS LIBRES DES SYSTÈMES À DEUX DEGRÉS DE LIBERTÉ 1 A Zouine EMG 2eme Prépa.

OSCILLATIONS LIBRES DES SYSTÈMES ÀDEUX DEGRÉS DE
LIBERTÉ1
A Z
ou
ine
EMG 2eme Prépa

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positionssont appelés systèmes à deux degrés de liberté.
2
A Z
ou
ine
EMG 2eme Prépa

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
équations différentielles du mouvement que l’on peut obtenir à partir des équations de Lagrange
3
A Z
ou
ine
EMG 2eme Prépa

SYSTÈMES À DEUX DEGRÉS DE LIBERTÉ
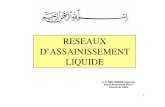
Système masses-ressorts en translation
4
A Z
ou
ine
EMG 2eme Prépa

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Equations différentielles du mouvement
Le lagrangien L = T − U s’écrit alors
5
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Les équations de Lagrange s’écrivent
D’où le système d’équations différentielles du mouvement
6
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Les termes −Kx2 et −Kx1 qui apparaissent respectivement dans la première et la seconde équation sont appelés termes de couplage, et les deux équations différentielles sont dites couplées.
7
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Résolution des équations différentielles
Recherchons une solution particulière de la forme :
où A1, A2 et Φ sont des constantes et ω l’une des pulsations propres du système
8
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
La substitution de x1 et x2 dans le système d’équations différentielles donne
un système d’équations linéaires homogènes dont les inconnues sont A1 et A2
9
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Ce système admet une solution non identiquement nulle seulement si le déterminant Δ(ω) des coefficients de A1 et A2 est égal à zéro.
Le déterminant Δ(ω)est appelé déterminant caractéristique. L’équation Δ(ω)= 0 est appelée l’équation caractéristique ou équation aux pulsations propres.
10
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
l’équation caractéristique ou équation aux pulsations propres s’écrit:
ou encore
11
A Z
ou
ine
EMG 2eme Prépa

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Cette équation est une équation quadratique en ω qui admet deux solutions réelles positives x1 et x2 appelées les pulsations propres du système.
A11, A12, A21, A22, Φ1 et Φ2 sont des constantes.
12
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
on dit que le système oscille dans le premier mode
Lorsque A12 = A22 = 0,
Lorsque A11 = A21 = 0
on dit que le système oscille dans le second mode
13
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
Etudions les particularités de ces deux solutions particulières :
– La première solution particulière s’écrit :
x1 et x2 doivent vérifier le système d’équations différentielles, ce qui donne
14
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
le rapport des amplitudes dans le premier mode
– La seconde solution particulière s’écrit :
15
A Z
ou
ine

SYSTÈMES ÀDEUX DEGRÉS DE LIBERTÉ
– La solution générale (x1, x2) est une combinaison linéaire de ces deux solutions particulières. x1 et x2 s’écrivent alors:
où A11, A12, 1 et 2 sont des constantes d’intégration dont les valeurs sont fixées par les conditions initiales.
16
A Z
ou
ine

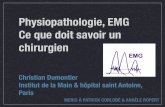
APPLICATION: PENDULES COUPLÉS
17
A Z
ou
ine

APPLICATION: PENDULES COUPLÉS
l’énergie cinétique et l’énergie potentielle
Les équations de Lagrange permettent d’obtenir les équations différentielles du mouvement
18
A Z
ou
ine

APPLICATION: PENDULES COUPLÉS
une solution particulière de ce système d’équations différentiellesSerait:
Ces deux expressions doivent satisfaire le système d’équations différentielles, d’où:
19
A Z
ou
ine

APPLICATION: PENDULES COUPLÉS
l’équation aux fréquences:
D’où l’on tire l’expression des pulsations propres ω1 et ω2
La solution du système d’équations différentielles est donc
20
A Z
ou
ine

APPLICATION: PENDULES COUPLÉS
Dans le premier mode, on obtient le système
Dans le second mode, on obtient
21
A Z
ou
ine

APPLICATION: PENDULES COUPLÉS
Tenant compte des expressions de ω1 et ω2 on obtient les valeurs du rapport des amplitudes dans les modes μ1 = +1 et μ2 = −1.
Les solutions du système d’équations différentielless’écrivent alors
22
A Z
ou
ine

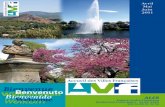
EXERCICE À FAIRE
23
A Z
ou
ine
Dans la figure ci-dessous, M et R représentent respectivement la masse et le rayon de la poulie. x1 et x2 représentent les écarts des deux masses par rapport à leur position d’équilibre.
On prend : M = 2(m2 − m1) avec m2 = m, et k0 = k1 = k2 = k.
1. Ecrire le Lagrangien du système.2. Déterminer les pulsations propres et le rapport des amplitudes de chacun des modes en fonction de m et k.