Nouvelles techniques numériques pour la simulation des ... · 0 + a2tŸ0 = PŸ 1 + a2tŸ1...
34
—LAT E X prosper — Stage de fin d’étude Nouvelles techniques numériques pour la simulation des écoulements diphasiques dans les conduites pétrolières Linda L INISE Master Mathématiques et Applications Spécialité Ingénierie Mathématique (Parcours MPE) Université Pierre et Marie Curie Direction Technologie, Informatique et Mathématiques Appliquées Département Mathématiques Appliquées Institut Français du Pétrole Nouvelles techniques num´ eriques pour la simulation des ´ ecoulements diphasiques dans les conduites p´ etroli` eres – p.1
Transcript of Nouvelles techniques numériques pour la simulation des ... · 0 + a2tŸ0 = PŸ 1 + a2tŸ1...

—LA
T EXprosper
—
Stage de fin d’étude
Nouvelles techniques numériques pourla simulation des écoulements diphasiques
dans les conduites pétrolières
Linda LINISE
Master Mathématiques et ApplicationsSpécialité Ingénierie Mathématique
(Parcours MPE)Université Pierre et Marie Curie
Direction Technologie, Informatique etMathématiques AppliquéesDépartement Mathématiques AppliquéesInstitut Français du Pétrole
Nouvelles techniques numeriques pour la simulation des ecoulements diphasiques dans les conduites petrolieres – p.1

—LA
T EXprosper
—
Plan de l’exposé
. Présentation
. Entreprise
. Équipe
. Écoulements diphasiques en conduites
. Contexte industriel
. Modèle mathématique
. Nouveau schéma : Lagrange-Projection. Approximation numérique. Conditions aux limites. 2nd ordre et terme source. Simulations numériques
. Bilan
Nouvelles techniques numeriques pour la simulation des ecoulements diphasiques dans les conduites petrolieres – p.2

—LA
T EXprosper
—
Entreprise
. Recherche. Recherche appliquée
. Études
. Formation. École du pétrole et des moteurs. Thèses — Post-doctorats
. Diffusion des connaissances. Colloques. Publication d’articles et d’ouvrages
∗ Oil & Gas Science and Technology
Presentation de l’Entreprise – p.3

—LA
T EXprosper
—
Recherche et Développement
. La R&D de l’IFP est organisée autour de 3 Centres de Résultats :. Exploration - Production. Raffinage - Pétrochimie
. Moteurs - Énergie
. 10 Divisions de recherche, dont la Division Technologie,Informatique et Mathématiques Appliquées.
. Les compétences de cette Division sont réparties dans 4départements, dont le Département Mathématiques Appliquées.
Presentation de l’Entreprise – p.4

—LA
T EXprosper
—
Présentation de l’équipe
. Institut Français du Pétrole
. Quang Huy TRAN (responsable)
. Nikolaï ANDRIANOV (post-doc)
. Linda LINISE
. Laboratoire Jacques-Louis Lions
. Marie POSTEL
. Frédéric COQUEL
Presentation de l’equipe – p.5

—LA
T EXprosper
—
TACITE
. TRANSPORT POLYPHASIQUE
. depuis la plate-forme deforage jusqu’à l’unité deproduction
. à travers les conduitesmunies d’équipementsvariés
. CODE COMMERCIAL (Fortran)
Transcient Analysis Code IFP Total Elf
Contexte industriel – p.6

—LA
T EXprosper
—
But d’une simulation
. Étant donnés. l’état initial (t = 0) des variables physiques le long de la conduite. un scénario imposé sur les conditions aux limites
- le débit total qT = qT(0, t)- le débit de gaz qG = qG(0, t)- la pression P = P(L, t)- une condition de non-retour : v(L, t)< 0 ⇒ Y(L, t) = 1.
Liquide
Gaz
Pression
. Prédire l’évolution de toutes les variables physiques dans le pipelineau cours du temps (t > 0)
Contexte physique – p.7

—LA
T EXprosper
—
Hypothèses et Équations physiques
Hypotheses :
. Écoulement isotherme diphasique (Gaz/liquide)
. Conduite horizontale
. Loi de glissement nul (v = vl = vp)
Equations : Lois de conservations moyennées par section
. Conservation de la masse de la phase
∂t(ρpRp) + ∂x(ρpRpv) = 0
. Conservation de la quantité de mouvement
∂t(ρv) + ∂x(ρv2 + P) = S
Modele physique – p.8

—LA
T EXprosper
—
Propriétés Mathématiques
On utilise le Drift-Flux Model :
∂t(ρ) + ∂x(ρv) = 0∂t(ρY) + ∂x(ρYv) = 0∂t(ρv) + ∂x(ρv2 + P) = 0
(∂tU + ∂xF(U) = 0
)
+ loi de fermeture (thermodynamique) : P = P(ρ, ρY)
. Le système obtenu est hyperbolique.
. 3 valeurs propres
. 2 correspondant aux vitesses des ondes acoustiques (rapides)
. 1 correspondant à la vitesse d’une onde cinématique (lente).
Modele mathematique – p.9

—LA
T EXprosper
—
Schémas existants
Il existe déjà 2 schémas en explicite et en semi-implicite :
. VFRoe
. coûte cher
. robuste mais ne garantit pas la positivité
. Relaxation
. coûte moins cher que VFRoe
. robuste et garantit la positivité en explicite uniquement
=⇒ Recherche d’un nouveau schéma
Schemas existants – p.10

—LA
T EXprosper
—
Lagrange - Projection
Idée : Décomposer le flux du modèle en une partie acoustique (nonlinéaire) et une partie transport (linéaire).
⇒ à chaque pas de temps, le schéma s’effectue en 2 étapes :
- étape Lagrangienne
ρ ∂t
τ
Yv
+ ∂x
−v0P
=
000
- étape de Projection
∂t
ρ
ρYρv
+ v ∂x
ρ
ρYρv
=
000
Nouveau schema – p.11

—LA
T EXprosper
—
Variables et notations
Introduisons
. deux nouvelles variables :
. le co-volume τ = 1/ρ
. et la variable lagrangienne y définie par
dx = vdt + τdy
. et de nouvelles notations :
Temps n n +12
n + 1
Variable X X X
Table 1: Corrélation temps - variable
Approximation numerique – p.12

—LA
T EXprosper
—
Relaxation
En “relaxant” les deux phases, on obtient :
. Phase Lagrange :
ρ∂t(τ) − ∂x(v) = 0ρ∂t(Y) = 0ρ∂t(v) + ∂x(Π) = 0ρ∂t(Π) + a2∂x(v) = 0
(1)
. Phase Projection :
∂t(ρ) + v∂x(ρ) = 0∂t(ρY) + v∂x(ρY) = 0∂t(ρv) + v∂x(ρv) = 0∂t(ρΠ) + v∂x(ρΠ) = 0
(2)
Schema en continu – p.13

—LA
T EXprosper
—
Discrétisation de la phase lagrangienne
Après discrétisation de (1), on obtient :
ρiτi − τi
∆t−
v∗i+1/2 − v∗i−1/2∆x
= 0
ρivi − vi
∆t−
Π∗i+1/2 − Π
∗i−1/2
∆x= 0
(3)
avec
Π∗i+1/2 =
Πi + Πi+12
+ avi − vi+1
2,
v∗i+1/2 =vi + vi+1
2+
Πi − Πi+12a
(4)
où (4) est la solution du problème de Riemann Eulérien (direct).
Schema explicite – p.14

—LA
T EXprosper
—
Discrétisation de la phase de projection
Après discrétisation de (2), on obtient :
ρi = ρi −∆t∆x
[(v∗i−1/2)
+(ρi − ρi−1) + (v∗i+1/2)−(ρi+1 − ρi)
]
(ρY)i = (ρY)i −∆t∆x
[(v∗i−1/2)
+((ρY)i − (ρY)i−1) + (v∗i+1/2)−((ρY)i+1 − (ρY)i)
]
(ρv)i = (ρv)i −∆t∆x
[(v∗i−1/2)
+((ρv)i − (ρv)i−1) + (v∗i+1/2)−((ρv)i+1 − (ρv)i)
]
(5)
avec ()+ la partie positive et ()− la partie négative.
Schema explicite – p.15

—LA
T EXprosper
—
Relations
. Identite de Lagrange
ρi = ρi[1 +
∆t∆x
(v∗i+1/2 − v∗i−1/2)]
(6)
=⇒ Vérification de la consistance du schéma.
. Condition de positivite
1 +∆t∆x
((v∗i+1/2)
− − (v∗i−1/2)+)
> 0 (7)
=⇒ borne maximale pour∆t∆x
.
Schema explicite – p.16

—LA
T EXprosper
—
Discrétisation de la phase lagrangienne (1)
En semi-implicite, la discrétisation du système (1) donne :
ρiτi − τi
∆t−
v∗i+1/2 − v∗i−1/2∆x
= 0
ρivi − vi
∆t−
Π∗i+1/2 − Π
∗i−1/2
∆x= 0
(8)
avec
Π∗i+1/2 =
Πi + Πi+12
+ avi − vi+1
2,
v∗i+1/2 =vi + vi+1
2+
Πi − Πi+12a
(9)
Schema semi-implicite – p.17

—LA
T EXprosper
—
Discrétisation de la phase lagrangienne (2)
Soient les incréments suivants :
δτi = τi − τi , δvi = vi − vi et δΠi = Πi − Πi
En posant ν =∆t
2∆x, et en considérant l’équation δΠi + a2δτi = 0 le
système (8) devient :
δτi −ν
ρi(δvi+1 − δvi−1) −
aν
ρi(δτi+1 − 2δτi + δτi−1) =
ν
ρiResi(τ)
δvi −a2ν
ρi(δτi+1 − δτi−1) −
aν
ρi(δvi+1 − 2δvi + δvi−1) =
ν
ρiResi(v)
avec,
Resi(τ) =v∗i+1/2 − v∗i−1/2
∆xet Resi(v) = −
Π∗i+1/2 − Π
∗i−1/2
∆x
Schema semi-implicite – p.18

—LA
T EXprosper
—
Discrétisation de la phase lagrangienne (3)
Il est commode d’introduire les variables suivantes :
{δC−
i = δvi − aδτiδC+
i = δvi+1 + aδτi+1
Ce qui permet d’écrire
2ν
ρiδC−
i−1 +1a(1 +
2aν
ρi)(δC+
i − δC−i ) − 2
ν
ρiδC+
i+1 =∆tρi
Resi(τ)
−2aν
ρiδC−
i−1 + (1 +2aν
ρi)(δC+
i − δC−i ) − 2a
ν
ρiδC+
i+1 =∆tρi
Resi(v)
=⇒ Systèmes matriciels en C−i et C+
i
Schema semi-implicite – p.19

—LA
T EXprosper
—
Conditions limites à l’amont (1)
A l’amont Les conditions imposées sont :
v0 = qT τ0 le débit totalΠ0 − av0 = Π1 − av1 l’annulation de l’onde v − aτ
Π0 + a2τ0 = Π1 + a2τ1 l’annulation de l’onde v
Par linéarisation de ce système, on obtient pour la dernière ligne
δΠ0 + a2δτ0 = δΠ1 + a2δτ1
orδΠ1 = −a2δτ1
donc,
δΠ0 = −a2δτ0.
Conditions limites a l’amont – p.20

—LA
T EXprosper
—
Conditions limites à l’amont (2)
En linéarisant la deuxième condition imposée et d’après l’équationprécédente, on a
−a2δτ0 − aδv0 = −a2δτ1 − aδv1
c’est-à-dire(δC+)0 = (δC+)1
De la première équation v0 = qT τ0, on déduit une relation entre δC−0 et
δC+0 :
(1 +qTa
)δC−0 + (1 −
qTa
)δC+0 = τ0δqT
Conditions limites a l’amont – p.21

—LA
T EXprosper
—
Conditions limites à l’amont (3)
La matrice du système en δC+ est :
1 −1 0 0 · · · 0
0 1 +2aν
ρ1−
2aν
ρ10 · · · 0
.... . .
. . .. . .
......
. . . 1 +2aν
ρi−
2aν
ρi
. . ....
......
. . .. . .
. . . 0... · · · · · · 0 1 +
2aν
ρN−
2aν
ρN0 · · · · · · · · · 0 ?
Conditions limites a l’amont – p.22

—LA
T EXprosper
—
Conditions limites à l’aval (1)
A l’aval Les conditions imposées sont :
ΠN+1 = P la pressionΠN+1 + avN+1 = ΠN + avN l’annulation de l’onde v + aτ
ΠN+1 + a2τN+1 = ΠN + a2τN l’annulation de l’onde v
Par linéarisation de ce système, on obtient pour la derniAère ligne
δΠN+1 + a2δτN+1 = δΠN + a2δτN
orδΠN = −a2δτN
donc,
δΠN+1 = −a2δτN+1
Conditions limites l’aval – p.23

—LA
T EXprosper
—
Conditions limites à l’aval (2)
En linéarisant la deuxième condition imposée et d’après l’équationprécédente, on a
−a2δτN+1 + aδvN+1 = −a2δτN + aδvN
c’est-à-dire(δC−)N+1 = (δC−)N
De la première équation ΠN+1 = p, on déduit une relation entre δC−N+1 et
δC+N+1 :
δC−N+1 − δC+
N+1 =δΠN+1
a
Conditions limites l’aval – p.24

—LA
T EXprosper
—
Conditions limites à l’aval (3)
La matrice du système en δC+ est :
? 0 · · · · · · · · · 0
−2aν
ρ11 +
2aν
ρ10 · · · · · · 0
. . .. . .
. . ....
0 −2aν
ρi1 +
2aν
ρi
. . . · · · 0
.... . .
. . .. . .
. . ....
0 · · · 0 −2aν
ρN1 +
2aν
ρN0
0 · · · · · · 0 −1 1
Conditions limites l’aval – p.25

—LA
T EXprosper
—
Point fixe
Idée : Avoir une méthode de résolution exploitant l’idée d’un “balayage”Soient
. H− l’algorithme de descente permettant d’obtenir δC−N+1 à partir de
δC−0 et,
. H+ l’algorithme de remontée permettant d’obtenir δC+0 à partir de
δC+N+1
La fonction
F : (δC−)0 7−→ (δC−)N+1 7−→ (δC+)N+1 7−→ (δC+)0 7−→ (δC−)0
est affine et contractante.
=⇒ Unicité du point fixe.
Conditions aux limites – p.26

—LA
T EXprosper
—
Pas de temps optimal (1)
Une condition suffisante pour avoir la condition de positivité est :
1 − 2λ maxi
|vi+1/2| > 0
or |vi+1/2| ≤ |vi+1/2| + |δvi+1/2|
Le but est d’obtenir |δvi+1/2| ≤ λMi+1/2
On impose alors sur chaque arête
1 − 2λ[ |vi+1/2| + λMi+1/2] > 0
Il faut prendre un λ telle que
λracine<
1|vi+1/2| +
√|vi+1/2|2 + 2Mi+1/2
Pas de temps – p.27

—LA
T EXprosper
—
Pas de temps optimal (2)
Majoration de |δvi+1/2| :
|δvi+1/2| ≤ 2ϕ(|S−|1≤j≤i ;
1 + θ
2τ0|qT | bb θ|S+|1≤j≤i
)
+ ϕ(|S+|i+1≤j≤N ;1a|δp| bb |S−|i+1≤j≤N)
où
. le paramètre θ est défini par : θ =1 − qT/a1 + qT/a
= 1 −a − qTa + qT
. S+ et S− sont, respectivement, le max des valeurs absolues de :
S+i = λ(Res(vi) + aRes(τi)) et de S−
i = λ(Res(vi) − aRes(τi))
. la fonction ϕ est définie, pour tout triplet A , B, C positifs, par :
ϕ(A; BbbC) =
max (A; B) si C ≤ |B − A|
A + B2
+C4
+(B − A)2
4Csi C > |B − A|
(10)
Pas de temps – p.28

—LA
T EXprosper
—
Lagrange-Projection : 2nd ordre
. Montée en ordre: Phase lagrangienne
=⇒ Méthode de Crank-Nicholson
. Montée en ordre: Phase de Projection
. Reconstruction linéaire
. Limitation sur les variables conservatives
. Respect du prinicipe du maximum
=⇒ Limitation sur Y − Ymin et Ymax − Y .
Lagrange-Projection : 2nd ordre – p.29

—LA
T EXprosper
—
Lagrange-Projection avec terme source
Procedure de SplittingSystème initial sous forme conservative
∂tU + ∂xF(U) = S(U)
. sans source :∂tU + ∂xF(U) = 0
. lié uniquement au terme source :
∂tU = S(U)
=⇒ Traitement de la Source dans la phase de Projection
Lagrange-Projection avec terme source – p.30

—LA
T EXprosper
—
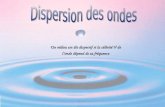
Simulation : Variations du débit de liquide
On diminue le débit de liquide ql jusqu’à 0 en maintenant le débit de gazqG constant et en augmentant la Pression P.
Relaxation
200
400
600
800
1000
1200
0 200 400 600 800 1000Temps (s)
Debit total
0
20
40
60
80
100
120
140
0 200 400 600 800 1000Temps (s)
Debit Gaz
500000
1e+06
1.5e+06
2e+06
2.5e+06
3e+06
3.5e+06
4e+06
4.5e+06
0 200 400 600 800 1000Temps (s)
Pression
Lagrange−Projection
0
=⇒ Le schéma Lagrange-Projection supporte mieux les perturbations.
Simulations numeriques – p.31

—LA
T EXprosper
—
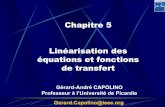
Simulation : Variations du débit de gaz
On augmente le débit de gaz qG en maintenant le débit de liquide ql et laPression P constants.
Ordre2 en espace
900
910
920
930
940
950
960
0 50 100 150 200 250 300Temps (s)
Debit total
90
100
110
120
130
140
150
160
0 50 100 150 200 250 300Temps (s)
Debit Gaz
2.3e+06
2.35e+06
2.4e+06
2.45e+06
2.5e+06
2.55e+06
2.6e+06
0 50 100 150 200 250 300Temps (s)
Pression
Ordre2 en espace et en temps
890
=⇒ Oscillations engendrées par Crank-Nicholson.
Simulations numeriques – p.32

—LA
T EXprosper
—
Simulation : Variations du débit de gaz
On double le débit de gaz qG en maintenant le débit de liquide ql et laPression P constants.
Relaxation
1000
1002
1004
1006
1008
1010
1012
0 200 400 600 800 1000Temps (s)
Debit total
100
120
140
160
180
200
220
0 200 400 600 800 1000Temps (s)
Debit Gaz
460000 470000 480000 490000 500000 510000 520000 530000 540000 550000 560000
0 200 400 600 800 1000Temps (s)
Pression
Lagrange−Projection
998
=⇒ Les résultats des deux méthodes sont comparables.
Simulations numeriques – p.33

—LA
T EXprosper
—
Bilan
. Travaux accomplis
. Mise en place des conditions aux limites- en explicite- en semi-implicite
. Majoration optimale de ∆t
. Mise en place du 2nd ordre
. “Approche” du terme source
. Travaux a accomplir
. Amélioration de l’intégration du terme source
. Conditions aux limites à l’ordre 2
Conclusion – p.34