moteur bipolaire T .I N N Wb I E’
50
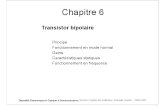
201 MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE Le sens de cette force est donné par la règle des trois doigts de la main droite. Deux conducteurs sont reliés pour former une spire. Il apparaît donc deux forces de même intensité F mais de sens opposés qui forment un couple électromagnétique d’intensité T=2.r.F avec r: rayon du rotor. On a donc : 7 U) U%,O 6%, ĭ, Conclusion: On démontre que le moment du couple électromagnétique total T ém exercé sur l’induit d’un moteur bipolaire vaut: T ém : Couple électromagnétique en Newton mètre (N.m) N : Nombre de conducteurs actifs de l’induit Ɏ : Flux créé par un pôle de l’inducteur en Webers (Wb) I : Intensité du courant dans l’induit, en Ampères (A) 2- Force électromotrice induite Le flux magnétique embrassé par l'une des spires de l'induit varie lorsque celle-ci est entraînée en rotation. La loi de Faraday, implique qu’une f.c.é.m. induite apparaît aux bornes de cette dernière. Il en est de même pour chacune des spires de l’induit. Conclusion: On démontre que la f.c.é.m. induite totale E’ qui apparaît aux bornes de l’induit d’un moteur bipolaire vaut : E’ : force contre électromotrice en (V) N : Nombre de conducteurs actifs de l’induit n : vitesse du moteur en tours par seconde (tr.s -1 ) Ɏ : Flux créé par un pôle de l’inducteur en (Wb) 3- 5pYHUVLELOLWp GX PRWHXU j FRXUDQW FRQWLQX Si l’induit du moteur à courant continu est entraîné par un autre système et que l’inducteur est alimenté, la loi de Faraday, ,implique qu’une f.é.m. induite apparaît aux bornes de l’induit. On peut y brancher un récepteur et recueillir de l’énergie électrique. Il y a transformation de l’énergie mécanique fournie à l’induit par le système d’entraînement en énergie électrique: c’est le fonctionnement en génératrice. 4- Inversion du sens de rotation Pour inverser le sens de rotation du moteur, on inverse le sens du courant dans l’induit ou dans l’inducteur. Dans le cas des moteurs à aimant permanent, on inverse le sens du courant dans l’induit. T ém = N.Φ 2.π .I E’ = N.n.Φ e=- dΦ dt I I I I F F B N S + - L
Transcript of moteur bipolaire T .I N N Wb I E’

201
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
Le sens de cette force est donné par la règle des trois doigts de la main droite.
Deux conducteurs sont reliés pour former une spire. Il apparaît donc deux forces de même intensité F mais de sens opposés qui forment un couple électromagnétique d’intensité T=2.r.F avec r: rayon du rotor.
On a donc :
Conclusion: On démontre que le moment du couple électromagnétique total Tém exercé sur l’induit d’un moteur bipolaire vaut:
Tém : Couple électromagnétique en Newton mètre (N.m)N : Nombre de conducteurs actifs de l’induit
: Flux créé par un pôle de l’inducteur en Webers (Wb) I : Intensité du courant dans l’induit, en Ampères (A)
2- Force électromotrice induiteLe flux magnétique embrassé par l'une des spires de l'induit varie lorsque celle-ci
est entraînée en rotation. La loi de Faraday, implique qu’une f.c.é.m. induite apparaît aux bornes de cette dernière. Il en est de même pour chacune des spires de l’induit.
Conclusion: On démontre que la f.c.é.m. induite totale E’ qui apparaît aux bornes de l’induit d’un moteur bipolaire vaut :
E’ : force contre électromotrice en (V)N : Nombre de conducteurs actifs de l’induit n : vitesse du moteur en tours par seconde (tr.s-1)
: Flux créé par un pôle de l’inducteur en (Wb)
3- Si l’induit du moteur à courant continu est entraîné par un autre système et que
l’inducteur est alimenté, la loi de Faraday, ,implique qu’une f.é.m. induite apparaît aux bornes de l’induit.
On peut y brancher un récepteur et recueillir de l’énergie électrique.Il y a transformation de l’énergie mécanique fournie à l’induit par le système
d’entraînement en énergie électrique: c’est le fonctionnement en génératrice.
4- Inversion du sens de rotationPour inverser le sens de rotation du moteur, on inverse le sens du courant dans
l’induit ou dans l’inducteur. Dans le cas des moteurs à aimant permanent, on inverse le sens du courant dans l’induit.
Tém =N.Φ2.π
.I
E’=N.n.Φ
e=-dΦdt
I
I
II
F
F
B
N
S
+-
L

202
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
VI- Le modèle électrique d’un moteur à courant continu est constitué d’une force contre
électromotrice f.c.é.m notée E’ et d’une résistance Ra (résistance de l‘induit).
Loi des mailles : U = E’ + Ra.I avec : U: tension d’alimentation en volts (V) Ra: Résistance du bobinage d’induit en Ohms ( ) I: Courant dans l’induit en Ampères (A) E’: f.c.é.m induite en Volts (V)
Démarrage Au moment du démarrage, la fréquence de rotation et la f.c.é.m
sont nulles. Le courant de démarrage direct (Idd) n’est limité que par la résistance de l’induit :
Ra étant faible, l'intensité au démarrage est forte, si elle persiste elle risque de
détériorer le bobinage de l'induit. Pour limiter ce courant, on doit:soit démarrer le moteur avec une tension réduite;soit placer un rhéostat en série, dit de démarrage dont la résistance va s'ajou-
ter à Ra, limitant ainsi le courant de démarrage. L'expression de ce courant de-vient alors:
Risque d’emballement du moteur Fonctionnement sous tension d’induit constante: E’ = U - Ra
Or en régime nominal: Ra.I << U et on aura n Conséquence: Si le flux s'affaiblit, le moteur
s'emballe et devient incontrôlable.
PROCÉDURE DE MISE SOUS TENSION DU MOTEURIl faut tout d’abord mettre l’inducteur sous tension, puis l’induit et il ne faut jamais
tenter d'ouvrir le circuit d'excitation (ie=0), lorsque l’induit est sous tension.
M
I
U
I
Ra
E’
Ra.IU
Schéma équivalentde l’induit
Idd = URa
Id =U
(Ra+ Rhd)
n
n=f(Φ)
Φ
n= N.ΦU - Ra.I

203
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
VII- Puissances et couples1- Puissance absorbée
Par l’induit: Pai=U.IPar l’inducteur: Pe=ue.ie Toutes les puissances sont exprimées en Watt (W)Pa = Pinduit + Pinducteur = U.I + ue.ie
2- Puissances et couple électromagnétiqueDe l’équation de l’induit : U = E’+Ra.I, on en déduit l’équation des puissances de
l’induit: U.I = E’.I + Ra.I2
Pai = U.I est la puissance absorbée par l’induit ;pjr = Ra.I2 est la puissance dissipée par effet joule dans la résistance de l’induit ;Pém = E’.I est la puissance électromagnétique que l’induit transmet au rotor par
l’action du couple électromagnétique Tém.ém
on déduit que:Pém = E’.I = Tém
Il y a bien conservation de l’énergie.
3- Puissances perduesLors de la transformation d’énergie, une partie de la puissance absorbée est perdue
sous forme de chaleur :par effet joules dans l’induit : Ra.I
2 avec Ra: résistance de l’enroulement induit;par effet joules dans l’inducteur : ue.ie = re. i2
e avec re: résistance de l’enroule-ment inducteur;
pertes mécaniques (frottements, ventilation): pméc;pertes fer (dues aux courants induits dans le circuit magnétique et pertes dues
au phénomène d’hystérésis): pfer;On appelle pertes collectives ou pertes constantes pC, la somme des pertes
mécaniques et des pertes fer qu’on peut déterminer par un essai à vide:pC = pméc + pfer
PROPRIÉTÉ: Lorsque le moteur fonctionne à flux constant, les pertes collectives sont
proportionnelles à la vitesse de rotation : pC avec a = constante.On définit le moment du couple de pertes TP par la relation:
CONSÉQUENCE : A flux constant, le moment du couple des pertes est une caractéristique constante
du moteur quelle que soit la vitesse. On peut le définir encore par la relation: Tp=Tém - Tu u=0 Tém= Tp).
4- Puissance mécanique utile C’est la puissance mécanique PU fournie à l’utilisateur, Pu . Elle correspond au moment du couple utile tel que: Pu = Tu
Tp = Pc
Ω

204
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
5- Bilan des puissances
NB: Dans le cas du moteur à aimant permanent, l’inducteur est réalisé avec des aimants permanents: il n’y a donc pas d’alimentation pour l’inducteur, le flux est constant et la puissance absorbée par le moteur se réduit à Pa=U.I
6- Détermination du rendementMéthode directe
Méthode des pertes séparées
VIII- Pour choisir un moteur à courant continu selon la charge à entrainer, il est
nécessaire de déterminer le couple à fournir et la vitesse de rotation. L’étude des caractéristiques, Tem(I), n(I) et Tem(n) est nécessaire.
1- Montage
Pai (induit)=U.I Pa =U.I+u.ie Pém=E’.I=Tém.Ω Pu=Tu.Ω
pe=ue.ie pje=pe=re.i2e
pji=Ra.I2
pC=pm+pf
Inducteur
Conversion d’énergie
η=Pu
Pu: puissance utilePu: puissance absorbéePa
η=Pu
(Pu+pji+pe+pc)= Pa
(Pa- pji - pe- pc)
M
G
I ieRhd
U U ue
A A
V
Rhe
Rhe
V
Chargeréglable
: Rhéostat servant à limiter le courant au moment de démarrage.
Rhd
Rhe :Rhéostat d’excitation servant à faire varierle courant d’excitation, donc de la vitesse.

205
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
2- Caractéristique du couple Tém(I)C’est la courbe représentative du couple en fonction du courant absorbé par le
moteur pour différentes valeurs de la charge.
3- Caractéristique de vitesse n(I)La caractéristique n(I) est la courbe qui représente la vitesse en fonction du courant
absorbé par le moteur pour des charges progressives.
INTERPRÉTATIONPour une tension d’alimentation constante et un courant d’excitation constant,
la vitesse de rotation en charge diminue quand le courant absorbé par le moteur augmente.
La caractéristique en charge n(I) pour U et ie constants est une droite affine de
la forme y=a.x+b où a est le coefficient directeur négatif de la droite et b est son ordonnée à l’origine. Deux points suffisent pour tracer cette caractéristique.
Tém = 2.ΠN.Φ .I
Tém = 2.ΠN.Φ
K1= 2.ΠN.Φ
.I
Tém = K1.I
Tém (Nm)
I (A)
Tém (I)
ie = constante n = constante
Tém = K1.I
Avec:
Tém = K1.I est l’équation d’une droite linéaire de la forme y = a.x
E’= N.Φ.nE’= K2.n
Donc K2.n=U-Ra.I
D’où: n =a.I+b
n
nN
IN
(tr/mn)
I (A)
n (I)
ie = constanteU = constante
E’= U-Ra.I
n = K2
(U-Ra.I)
n = K2
UK2
Ra .I- +
a =K2
Ra
b =K2
U
Avec:
-

206
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
4- Caractéristique mécanique Tu (n)Elle s’obtient à partir des expressions des deux caractéristiques précédentes qui
sont tracées à U=constante et ie=constant:
INTERPRÉTATION:La vitesse varie peu avec la charge. Celle-ci dépend par contre de la tension
d’alimentation de l’induit U et du courant d’excitation ie.
Le couple de démarrage est très important. Il est capable de vaincre un couple résistant élevé (cas du treuil d’un camion de remorquage).
Lorsque le moteur fonctionne à vide, le couple utile est nul, il est associé à une vitesse de rotation n0 (vitesse à vide). Connaissant Ra la résistance de l’induit, U0 la tension aux bornes de l’induit, I0 l’intensité du courant dans l’induit et n0 la vitesse de rotation du moteur, nous pouvons aisément calculer le moment du couple de pertes Tp, ce moment du couple est remarquable car on le considère comme constant.
Conclusion: L’essai à vide permet de calculer le moment du couple de pertes Tp.
Or Tu=Tém-Tp
D’autre part:
Tém = avec K1= 2.ΠN.Φ K1.I D’une part on a: �
�
Or I= Tém
K1
d'après , on remplace I par son expréssion dans � �
On en déduit: Tém=⇒ Ra
K1 .URa
K1.K2 .n- +
TémRa
K1 . URa
K1 . K2 .n= +- TuRa
K1 .U-Tp)Ra
K1.K2 .n= +-
Ra
K1 . K2-
(
nn0
Tp
Tp (tr/mn)
TémTu
(N.m)
Tém (n)Tu (n)
ie = constanteU = constante
à vide Tu=00{
{
(Caractéristique Tém=f(I))
(Caractéristique n=f(I))n = K2
UK2
Ra .I- +
n = K2
UK2
Ra- +Tém
K1
.
avec K2=N.Φ
La caractéristique mécanique est de la forme Tu=a.n+b qui estl’équation d’une droite de pentenégative avec:
a=
b= Ra
K1 . U - Tp
Tp= Constant ⇒ Tu // Tém
Tp = Pa0 pji-Ω0
U0.I0 Ra.I02-
2.π.n0 =

207
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
IX- Point de fonctionnementLa charge oppose au moteur
un couple résistant Tr. Pour que le moteur puisse entrainer cette charge, il doit fournir un couple utile Tu qui doit vaincre le couple résistant Tr.
En régime permanent, il y a égalité du couple utile Tu et du couple résistant Tr imposé par la charge.
On limite donc la caractéristique mécanique du moteur à sa partie utile qui nous permet de trouver le point (P) de fonctionnement de coordonnées (n', Tu') en régime nominal de l’ensemble (moteur + charge).
X- 1- Intérêt de la variation de la vitesseDe nombreux systèmes industriels
entraînés par des moteurs électriques utilisent la variation de vitesse pour optimiser leur fonctionnement:
variation de la vitesse de défile-ment d’une chaîne de fabrication;
variation de la vitesse de coupe ou d’avance des machines outils;
variation de la vitesse des sys-tèmes de transport des personnes (train, téléphérique, ...).
Deux technologies permettent d’obtenir cette variation de vitesse:
n (tr/mn)
Tu
(N.m)
Tu (n) Tr
n’
Tu’
Tr(n)
0
PPoint
de fonctionnemen
La technologie mécanique: système poulies-courroie,engrenages, système pignons-chaîne ,...
La technologie électronique: (Convertisseur d’énergie).

208
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
2- Avantages des convertisseurs électroniques: diminution des pertes mécaniques présentes dans les variateurs mécaniques
(poulies et courroies, engrenages); limitation voire suppression des surintensités lors du démarrage; adaptation précise de la vitesse; limitation du bruit; économie d’énergie.
3- Principe
réglage de la vitesse. N étant une constante de construction du moteur.
a. Action sur le flux Lorsque le courant inducteur diminue, le flux magnétique dans le moteur diminue.
Cette diminution provoque une augmentation de la vitesse, pouvant aller jusqu’à l’emballement du moteur et sa destruction. Son utilisation est très spécifique et très limitée. Outre ce risque, la diminution du flux conduit aussi à une diminution du couple moteur qui est directement proportionnel au flux.
b. Action sur la tension d’alimentation :La relation montre aussi que la vitesse est directement proportionnelle à la tension
d’alimentation U lorsque le flux magnétique est maintenu constant.La variation de la vitesse par action sur U permet d’obtenir une vitesse variable,
tout en ayant un couple maximal important en tout point de fonctionnement. Ce procédé est le plus utilisé et nécessite une source de tension continue réglable
(redresseur électronique commandé, hacheur).
4- Hacheur sériea. Définition
Le hacheur est un convertisseur continu/continu qui permet d’alimenter une charge sous tension réglable à partir d’une tension continue constante (batterie, alimentation stabilisée, réseau redressé...). Il peut servir de variateur de vitesse pour les moteurs à courant continu.
b. Symbole
ue usTensioncontinue
fixe
Si us< ue: Hacheur abaisseur de tension (hacheur série)Si us> ue: Hacheur élévateur de tension (hacheur parallèle)
Tension unidirectionnelle
de valeur moyenne réglable

209
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
Un hacheur peut être réalisé à l’aide d’interrupteurs électroniques commandés à l’ouverture et à la fermeture tels que les thyristors et les transistors bipolaires ou à effet de champ à grille isolée (MOSFET).
Ces interrupteurs électroniques permettent de "hacher" la tension continue d’alimentation afin de faire varier la valeur moyenne de la tension en sortie du convertisseur.
EXEMPLES D’INTERRUPTEURS ÉLECTRONIQUES
REMARQUELes interrupteurs électroniques
unidirectionnels, quelle que soit leur nature, peuvent être représentés par le symbole ci-contre:
c. Débit sur une charge résistive
i
V
HuH
R u(t)
D’après la loi des mailles: V-uH-u=0 ⇒ u=V-uH
� V: Source d’alimentation fixe
� R: Charge
� H: Interrupteur électronique
uH=0u=V i= =� de 0 à αT: H fermé ⇒{ ⇒
uR
VR
u=R.i=0 {i = 0 ⇒� de αT à T: H ouvert ⇒uH=V
t
V
u (V)V
i (A)VR
uH (V)
0 αT T+αTT 2T
t0 αT T+αTT 2T
t
t
0
0
αT
tF
T+αTT 2T
αT T+αTT 2Tfermé fermé
H H Houvert ouvert
H
SCHÉMA DE PRINCIPE
SYNTHÈSE
OSCILLOGRAMMES
L'interrupteur H s'ouvre et se ferme périodiquement.
f= 1TAppelons T la période et la fréquence de hachage.
La durée pendant laquelle H est fermé est appelée tF.
= tF
TOn définit le rapport cyclique α par : α
On peut ainsi écrire que tF = α.T avec 0 <α <1 (sans unité)
i
Electrodes de commande(amorçage et blocage)
H

210
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
INTERPRÉTATION:La tension de sortie du
hacheur (tension u(t)) n’est pas continue mais toujours positive. Lorsque la pé-riode est assez faible (fréquence de 100 à 1000 Hz) la charge ne «voit» pas les créneaux mais la valeur moyenne de la tension .
Le rapport cyclique peut être réglé. Donc la valeur moyenne umoy (ou <u>) de u(t) va varier.
Il s’agit d’un hacheur série car l’interrupteur H est monté en série entre la source et la charge.
VALEUR MOYENNE DE LA TENSION Calculons la valeur moyenne umoy (ou <u>) de u(t) en fonction de
REMARQUES:La valeur moyenne de la tension u(t) peut être ajustée en jouant sur la valeur du
rapport cyclique donc sur la commande de H.Quelle que soit la nature de la charge, on aura umoy= .V V. Le hacheur série
est bien abaisseur de tension ou «hacheur dévolteur».On mesure la valeur moyenne de la tension u(t) à l’aide d’un voltmètre numé-
rique en position DC.
d. Etude du hacheur série alimentant un moteur à courant continu
INTÉRÊT ET CONDITIONS DE FONCTIONNEMENT Pour faire varier la vitesse de rotation d’un moteur à courant continu, il faut faire
varier la valeur de sa tension d’alimentation. La solution idéale consiste à alimenter le moteur par l’intermédiaire d’un hacheur série.
En effet, à flux constant, le couple électromagnétique est proportionnel au courant (Tém= K.I). Si le courant est haché, le couple électromagnétique l'est aussi ce qui est inacceptable, car cela peut causer des vibrations au moteur provoquant une usure prématurée de ses constituants.
u (V)V
t0 αT T+αTT 2T
u (V)V
t0 αT T+αTT 2T
u (V)V
t0 αT T+αTT 2T
α est faible ⇒
est faible
α est moyen ⇒ est moyenne
α est grand ⇒est grande
umoy umoy
umoy
umoy
umoy
umoy
<u> = umoy
umoy
= T1 u(t) dt = T
10
T
# V dt = TV
0
αT
# dt = TV
0
αT
# t[ ]
[αT-0]
0
αT
= TV = T
αT .V= α .V =umoy α .V

211
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
Pour remédier à ce problème, il convient de «lisser» le courant dans le moteur. Pour ce faire, on ajoute en série avec l'induit une inductance dite de «lissage».
Cette inductance doit être suffisamment grande pour éviter la discontinuité du courant durant l'alimentation de l'induit du moteur.
MONTAGEL’interrupteur H est représenté
par son symbole normalisé;L est une inductance "pure"
permettant de lisser le cou-rant i(t) (on néglige celle de l’induit du moteur);
Le moteur est modélisé par sa f.c.e.m. E’ en série avec Ra.
La diode D (diode de roue libre) permet à l'inductance L de libérer l’énergie emmagasinée et ainsi, d’éviter qu’ils se produisent des surtensions aux bornes de l’interrupteur H lorsque ce dernier est ouvert.
On considère que la fréquence de hachage f est suffisamment importante pour que i(t) soit de forme triangulaire;
Le générateur impose une tension V qui reste sensiblement constante;
L’interrupteur unidirectionnel H laisse passer le courant d’intensité iH(t) vers la la portion du circuit: induit + bobine de lissage pendant la durée tf , ensuite vient l'ouverture de H et iH(t) devient nul.
A ce stade intervient la bobine et la diode de roue libre pour entretenir le courant alimentant l'induit, évitant ainsi la discontinuité.
Le fonctionnement demeure en débit continu.
umoy est toujours égale à .V
iR (A)
t0 αT T+αTT 2T
iM (A)
t0 αT T+αTT 2T
Charge résistive Charge inductive (moteur)
Sans bobine de lissage Avec bobine de lissage
Imin
Imax
H L
DuH
uD uMV u(t) Ra.i
E’
iiH
iD
ub
Induit
H ferméD ouvert
αT T0
Vu [v]
u=V
t [s]
Imax
Imin
αT T0
i [A]
t [s]
I
Imax
Imin
αT T0
iH [A]
t [s]
Imax
Imin
αT T0
iD [A]
t [s]
H ouvertD fermée
H ferméD ouvert
OSCILLOGRAMMES

212
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
ANALYSE DU FONCTIONNEMENT
GRANDEURS CARACTÉRISTIQUESTension moyenne aux bornes de la charge (umoy ou < u >):
Expression de la vitesse de rotation du moteurPour un moteur à courant continu, la résistance Ra est souvent négligeable, la
bobine de lissage est considérée comme inductance pure (Rb=0) et si le flux crée par l’inducteur est constant, l’expression de la valeur moyenne de u(t) devient alors:
umoy = <u>=E’ = . n=
Cette relation montre que pour un moteur à courant continu à excitation constante (flux constant), la vitesse varie linéairement en fonction du rapport cyclique .
Intensité moyenne imoy ou <i> traversant la charge:Si l’inductance de lissage est suffisament grande, le courant
dans la charge ne s’annule jamais, il est de forme triangulaire et ayant comme valeur moyenne:
Pour t TT
- l'interrupteur H est ouvert.- la diode D est passante (équivalent à un interrupteur fermé).
soit
Pour 0 t T
- l'interrupteur H est fermé.
NB: L est une inductance pure
- la diode D est bloquée (équivalent à un interrupteur ouvert).
Équation de fonctionnement: Équation de fonctionnement:
Avec
u=ub+uM=V u=ub+uM=0
ub= L di et uM=E’+Ra.i
soit:dt
u V L didt
Ra.i+E’+= =
u 0 L didt
Ra.i+E’+= =
H L
DuH
uD uMV u(t) Ra.i
E’
iiHub
H
DuH
uD uMV u(t) Ra.i
E’
iub
iD
iH L
umoy =
Or, en régime périodique établi, la valeur moyenne de est nulle:
E' est une constante ⇒ E ' E 'd'où : E’+Ra .imoy= .V avec 0 1
u= L didt
Ra.i+E’+ umoy =
=
⇒ u = L dtdi + Ra . i
Ra.i =
+ E’
et Ra . i = Ra.imoy
L dd tdiiL t
d =0
N.ΦVn
=
.
imoyImax minI
2+
=

213
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
L’intensité moyenne <i> peut être mesurée à l’aide d’un ampèremètre numérique en position DC.
e. Exemples d’oscillateurs de commande du hacheur sérieDans le cas où l’interrupteur électronique H du hacheur série est un transistor, il
faut réaliser un montage électronique délivrant un signal en crénaux avec un rapport cyclique réglable. Il s’agit d’un oscillateur.
Plusieurs montages réalisant cette fonction vous sont présentés ci-après:
EXEMPLE 1On utilise un comparateur à base d’A.L.I qui compare le signal en dents de scie v2(t)
à une tension continue réglable V1. La sortie vc attaque la base du transistor de puissance commandant le moteur.
EXEMPLE 2On utilise le circuit intégré NE555 comme oscillateur pour attaquer la base du
transistor de puissance.
EXEMPLE 3Commande par microcontrôleur. La sortie PWM du microcontrôleur est utilisée pour
commander le transistor.
v2(t)
v2(t)
vc(t)
V1
V1
P ∞+
- vc (t)
VmaxVcc
Signal en dents de scie
Commande 0
V2maxv [v]
t [s]
Vsat
vc [v]
t [s]
vc(t)
vc (t)
VccVCC
vc [v]
t [s]
4
7
62
1
5
3
8
RESET
DISCH
THRESTRIG
VccOUT
CONT
GND
Ra
Rb
C
Commande
0 αT T 2T 3T
f (Ra 2Rb) .C1.44
H= + (Ra
Ra Rb
2Rb)= +
α +
M
+Vcc
T
PIC
RPWM

214
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
C. RESUMÉ
Inducteur Induit
a- Schéma équivalent
f.c.é.m Ra
pour un moteur bipolaire
à la vitesse de rotationc- Expression de la vitesse
d- Bilan des puissances
e-Hacheur série
M
I ie
ueUE’
Ra.I
Induit Inducteur
I ie
ueU
Induit Inducteur
E‛+Ra.I=E‛=N.n.ΦAvec
U E‛ et U en (V)Ra: Résistance de l‛induit en Ohm (Ω)I : Courant de l‛induit en ampère (A)Ф : Flux de l‛inducteur en webers (Wb)
N.Φ N.ΦE‛n U-Ra.I
E‛ en (V)N : Nombre de conducteurs actifs de l‛induit n : vitesse en tours par seconde (tr.s-1)Ф : Flux de l‛inducteur en webers (Wb)
= =
Pai (induit)=U.I Pa =U.I+u.ie Pém=E’.I=Tém.Ω Pu=Tu.Ω
pe=ue.ie pje=pe=re.i2e
pji=Ra.I2
pC=pm+pf
Inducteur
Conversion d’énergie
Toutes les puissances sont en Watt
=umoy α .V=α N.ΦVn= .
KV= .
0 1est appelé rapport cyclique avec:
tF
Tα α
αα

215
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
D. ÉVALUATION
I- Contrôle des connaissances
1- Donner les principaux constituants d’un moteur à courant continu et préciser le rôle de chacun d'eux.
2- Pour mettre en marche un moteur à courant continu, il faut:a. alimenter l'induit puis alimenter l'inducteur ;b. alimenter l'inducteur puis alimenter l'induit ;c. alimenter l'induit et l'inducteur dans un ordre quelconque.
3- Le moteur est en fonctionnement normal. Si on diminue le courant d'excitation, alors:a. la vitesse de rotation augmente;b. la vitesse de rotation diminue;c. la vitesse de rotation reste quasiment constante.
4- Si le circuit d’excitation est accidentellement coupé alors que l’induit est encore alimenté:a. le moteur s'arrête lentement ;b. le moteur s'arrête rapidement;c. la vitesse de rotation augmente brusquement, avec un risque d'emballement .
5- La puissance électromagnétique développée par un moteur à courant continu est:a. le rapport du couple utile sur la vitesse angulaire;b. le produit du couple utile par la vitesse angulaire;c. le produit du courant induit par la force contre électromotrice.
6- Un hacheur série est un convertisseur:a. continu/continu;b. continu/alternatif;c. alternatif/continu
7- Le rapport cyclique est:a. la durée de conduction de la diode D divisée par la période;b. le rapport de la durée de conduction de l'interrupteur H avec la période;c. la différence des durées de conduction de l’interrupteur H et de la diode D.
8- Par quoi mesure -t- on la valeur moyenne <u> ou umoy ?

216
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
II- Exercices résolus
EXERCICE N°1On donne deux plaques signalétiques relevées sur deux moteurs à courant continu.
1- A partir des données de la ligne de la première plaque, calculer la puissance électrique absorbée par le moteur (induit + inducteur). En déduire le rendement.
2- Calculer, en utilisant les mêmes données, le couple utile que peut fournir le moteur.
3- Que peut-on conclure en observant la tension d’induit et la vitesse pour les lignes et ?
4- La vitesse de la ligne est de 1150 tr/min, celle de la ligne est de 1720 tr/min. A quoi est due cette différence?
5- Quelle est la différence entre le moteur désigné par la la plaque n°1 et celui désigné par la plaque n°2?
EXERCICE N°2Un moteur à excitation indépendante a pour résistance d’induit Ra est
alimenté par une tension d’alimentation U variable.Un essai à vide a permis de mesurer le courant I0 = 1,3 A, la tension U0 = 150 V et
n0 = 1250 tr/min.1- Calculer les pertes collectives pc et le moment du couple de pertes TP.En charge, pour une tension d’alimentation U=170 V, l’induit appelle un courant
constant I= 22 A, la vitesse de rotation n=1250 tr/min.2- Calculer la f.c.é.m. E’.3- Établir la relation entre E’ et n lorsque U varie.4- Calculer la tension de démarrage Ud.5- Établir l’expression de n en fonction de U.6- Montrer que le moment du couple électromagnétique Tém est constant et
calculer sa valeur.7- Ecrire l’expression de Tu=f (n).8- Le moteur doit entraîner une charge qui a pour couple résistant:Tr = 2.10-06.n2 – 1,1.10-3 .n + 23. Calculer les coordonnées du point de fonctionnement.
SOMERLEROY MADE IN
IEC 34.1.1990 FRANCEMOTEUR A COURANT CONTINU
TYPE: LSK 1604 S 02
Service / Duty S1 DE 6312 2RS C3 NDE 6312 2RS C3
Mnom
Mom./Rat.
N° 700000/10 9/1992
301 N.m
T Isystème peinture:
kW min -1 V A V A33360
3601150115
172036,3
36,33,63
95,544 9,55
440
440
95,5 240Excit. / FieldInduit / Arm.
Altit 1000 m Temp 40 °C
M 249 KgIC 06IP 23IM 1001Classe / Ins class H
/ Rated Torque
DIRECT CURRENT MOTOR
�
��
DC SERVO MOTORTYPE SGMG-09A2ABC850 W
CONT
DATE 0306O/N 3P0037 001
S / N B0036D037030078YASKAWA ELECTRIC
-078
MADE IN JAPAN
ins. F7.1 A5.39 N.m 1500 r/min200 V
Plaque signalétique N°1 Plaque signalétique N°2

217
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
EXERCICE N°3Un moteur à courant continu est alimenté
à travers un hacheur série selon le schéma ci-contre:
Le hacheur fonctionne à une fréquence f = 500 Hz.
L’interrupteur H est fermé lorsque 0 < t < T et ouvert entre T et T.
La diode est supposée parfaite.L'inductance de la bobine de lissage
L est de valeur suffisante pour que le courant traversant l'induit du moteur soit considéré comme constant: i = I = cte.
La résistance de l’induit du moteur est : Ra
1- Représenter les allures de u(t) et uH(t) en fonction du temps.2- Exprimer la valeur moyenne de u en fonction de V et .3- Représenter les allures de iH et iD en fonction du temps.4- Exprimer les valeurs moyennes des courants iH et iD en fonction de I et .5- Déterminer l'intensité I du courant dans l'induit en fonction de V, E', Ra et .6- Application numérique :Calculer <u>, I et < iD > pour V = 220 V, E' = 145 V et = 0,7.7- Établir la relation liant la vitesse n du moteur (en tr/min) à pour E' = 0,153.n,
sachant que Ra I = 9 A.8- Tracer n en fonction de .
III-
EXERCICE N°1Le graphe ci-contre donne la forme et la valeur du
courant dans l'induit lors des différentes phases du fonctionnement d'un moteur à courant continu entraînant la broche d'une machine outils.
La tension d’alimentation du moteur est de 24V continue.
1- Les repères mentionnés sur le graphe ci-contre représentent les différentes phases du fonctionne-ment du moteur.
Ces phases sont: démarrage, fonctionnement à vide, usinage et freinage.a. Noter pour chaque repère le mode adéquat.b. En déduire la valeur du courant de démarrage Id, le courant absorbé à vide I0, le courant en phase d'usinage Iu.c. Quelle est la valeur de la f.c.é.m E' du moteur au moment du démarrage. d. A l'aide des résultats précédents, calculer Ra la résistance de l'induit du moteur.
H L
DRL
uH
VE’
i=I=CteiH
iD
uL
u
L: Inductance pure (RL=0)DRL: diode de roue libre
Ra
01A2A3A4A5A6A
�
�
�
� t
I(A)I=f(t)

218
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
2- Calcul de la vitesse de rotation du moteur en phase d’usinage.La constante de couple k vaut 0,0527 Nm/A (exprimée aussi en V.s/rad). a. Calculer la valeur de la f.c.é.m E' lors de la phase d'usinage. b. En déduire la vitesse de rotation du moteur.
3- Calcul du rendement du moteur.On donne la valeur des pertes constantes : Pc = 8 Wa. Calculer la puissance utile. b. Calculer le moment du couple mécanique utile du moteur. c.
EXERCICE N°2Dans le système de ventilation forcée d'une automobile, on utilise un moteur à
courant continu à aimants permanents pour actionner le ventilateur.1- Représenter le modèle électrique équivalent à l'induit du moteur.2- Un essai du moteur sous tension réduite, rotor bloqué est fait. L'intensité I est
alors de 15 A et la tension U est égale à 6,7 VQuelle est la valeur de la force contre électromotrice E' lorsque le rotor du
moteur est bloqué ?En déduire la valeur de la résistance Ra de l'induit.
Ce moteur à courant continu doit entraîner le ventilateur à différentes vitesses. Pour cela on applique à son induit une tension U réglable. La figure ci-dessous donne la caractéristique mécanique du moteur pour U = 12 V.
Sur cette même figure, on a aussi représenté la caractéristique mécanique du ventilateur Tr = f(n).
3- Déterminer les valeurs T et n des coordonnées du point de fonctionnement du groupe moteur-ventilateur pour U = 12 V.
4- En déduire la puissance utile fournie par le moteur.5- L'intensité la du courant pour ce point fonctionnement vaut 8,5 A. En déduire la
puissance Pa absorbée par le moteur et calculer son rendement.
500
0,5 N.m
1 N.m
T (N.m)
n (tr/mn)600 700 800 900 1000 1100 1200 1300
Tu (n) Tr (n)

219
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
EXERCICE N°3On se propose d'étudier un moteur à courant continu à excitation séparée utilisé
dans un système automatisé. L'induit de ce moteur est alimenté par l’intermédiaire d’un hacheur série conforfement
au schéma ci-dessous.
1- Quel type de conversion réalise un hacheur série ?2- Quel est le rôle de la bobine L ?3- Indiquer le nom et le rôle du composant D.4- Lors de l'étude du hacheur au laboratoire, on a relevé grâce à un oscilloscope la
tension u(t) représentée ci-dessous.
a. Déterminer graphiquement la période T de la tension u(t) et en déduire sa fréquence f.b. Déterminer graphiquement la valeur UBAT de la tension délivrée par la batterie.c. Déterminer graphiquement le rapport cyclique noté .
5- Calcul et mesure de la valeur moyennea. Montrer que la valeur moyenne de u(t) s'écrit umoy BAT
b. Calculer numériquement umoy BAT= 18 Vc. Avec quel type d'appareil mesure-t-on umoy ?
6- En négligeant la résistance d'induit, la tension aux bornes du moteur s'écrit uMmoy = 0,004.n (n désigne la fréquence de rotation exprimée en tr.min-1).a. Justifier l'égalité uMmoy = umoy
b.
H
LD+
-
uH
UBAT
Batte
rie
uM
I= constanteiH
iD
uL
u(t)M
Sensibilité verticale:3V par division
Sensibilité horizontale:10 μs par division0 V

220
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
EXERCICE N°4La plaque signalétique d’une machine à courant continu à excitation indépendante
indique les valeurs nominales suivantes:Tension d’induit : UN=90 VIntensité du courant d’induit : IN=10 APuissance utile : Pu=750 WVitesse de rotation: nN=1500 tr.min-1
Le courant d’excitation est supposé constant dans tout l'exercice. La valeur de la résistance de l’induit est Ra .
1- En régime nominal, calculer:a. la force contre électromotrice E’N;b. le moment du couple électromagnétique Tém;c. le moment du couple utile Tu;d. le rendement de l’induit.
2- La vitesse angulaire de rotation du moteur est exprimée en rad.s-1.a. Montrer que E’ peut s’écrire , calculer la valeur numérique de a;b. En déduire que Tém = 0,547. I (I étant le courant de l’induit).
3- Durant le fonctionnement nominal, on supprime la charge du moteur, qui désormais, fonctionne à vide.
Au cours de cette opération, la vitesse de rotation varie. On la ramène alors à sa valeur nominale nN.
a. Sur quelle grandeur faut-il agir et dans quel sens ? Justifier le sens croissant ou décroissant.
b. Donner la valeur de la f.c.é.m à vide E’0 , en déduire la tension aux bornes de l’induit U si l’intensité du courant d’induit à vide est I0 = 1,28 A.c. Calculer les pertes constantes du moteur.d. Vérifier que le moment du couple de pertes noté Tp est égal à 0,70 N.m. On admet que Tp reste constant dans le reste de l'exercice.
4- Le moteur est alimenté sous une tension d’induit U réglable de 0 à 20 V, la charge exerce un couple résistant constant dont le moment est Tr = 4,77 N.m.
a. Montrer que dans ces conditions le couple électromagnétique Tém et le courant d’induit I restent constants et donner leurs valeurs.
b. Démontrer que l’on peut écrire et en déduire que n = 17,5.U-70 (n étant la fréquence de rotation du moteur exprimée en tr.min-1).c. Donner le mode opératoire pour le démarrage du moteur et déterminer sa tension de démarrage.

221
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
EXERCICE N°5
Les caractéristiques nominales d’un moteur à courant continu à excitation indépendante parfaitement compensé (son flux ne dépend que du courant d’excitation), sont les suivantes :
Tension d’induit nominale : Un=20 VIntensité du courant induit nominal In=5,0 ARésistance de l’induit : Ra
Intensité du courant d’excitation nominale : iexn= 1,0AFréquence de rotation nominale : nn = 2865tr/min
1- Calculer la force électromotrice En 2- Calculer le moment du couple électromagnétique T en Nm dans les conditions
nominales.
3- L’intensité du courant d’excitation reste constante : iex =iexn, montrer que :E= 0,06. ou étant la vitesse angulaire exprimée en rad/s ;T = 0,06.I
4- Les intensités des courants d’excitation et d’induit restent constantes (iex=iexn et
I=In), montrer que l’on peut écrire : n = 159.U - 318 (n la fréquence de rotation exprimée en tr/min et U la tension
d’induit en V).
5- Quelles sont les deux valeurs limites de la tension U pour que le moteur tourne entre 0 et 3600tr/min.
6- Si la tension est limitée à 24V, dans quel sens (croissant ou décroissant) faut-il agir sur iex pour obtenir la vitesse maximale ?

222
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
IV- Correction des exercices
EXERCICE 1Pour le moteur ayant la plaque signalétique n°1:1- Pa =(U.I + u.i) = (440×95,5) + (360×3) = 43100 W.Rendement
2- Couple utile
3- La vitesse est directement proportionnelle à la tension d'induit.
4- Cette différence est due à la diminution de la tension d'excitation (de 360 V à 240 V) qui va engendrer une diminution du courant d'excitation, donc du flux de l'inducteur.
5- Le moteur de la plaque 2 est à aimant permanent car il n'y a aucune indication sur la tension d'excitation ou le courant d'excitation.
EXERCICE 21- P0 =Ra.I0
2 + pc, pc = U0.I0 – Ra.I02 soit Pc = 193,4 W
2- U=E’-Ra.I, E’=U-Ra.I soit E’=150,2 V
3- On sait que d’où la relation E’= 120,16.10-3.n
4- Au démarrage E’=0 V et Ud = Ra.I soit Ud = 0,9.22= 19.8 V
5- E’ = 120,2.10-3.n et U =E’ +Ra.I = 120,2.10-3.n + Ra.I On trouve n = 8,32.U – 164,8
6- et I = Cte, E’=120,16.10-3 .n Tém= 25,2 Nm
7- Tu=Tém -Tp soit Tu = 25,2 - 1,18.10-3.n8- Pour trouver le point de fonctionnement on fait Tu = Tr
25,2 -1,18.10-3 n =2.10-6 n2 -1,1.10-3 n+23 soit 2.10-6 n2 - 80.10-6 n - 2,2 = 0C'est une équation du second degré en n, admettant deux racines:
= =
=Pu 36 300 0,842 ≈ 84 %43 100Pa
Pu = Tu .Ω ⇒ Tu = = 301,59 N.mPu 36300 x 602x3,14x1150Ω Tu = .60=Pu avec 2. .n
2. .n 60 Ω= ⇒
TP= pc .60(2.π.n) = 1,48 Nmet
E’ k n k E’n
150.21250 120,16.10-3
n120,16.10-3
U - Ra.I
TémE’. I avec 2. .n
60
On choisit la vitesse positive : n = 1070 tr/min et T = 23,9 Nm.
Δ=(-80.10-6)-(4.2.10-6. (2,2)=17,6.10-6
n1=- (-80.10-6- 17,6.10-6) = -1029
2.2.10-6n2=
- (-80.10-6+ 17,6.10-6) =10702.2.10-6

223
MOTEUR À COURANT CONTINU À EXCITATION INDÉPENDANTE
EXERCICE 31- Allures de u(t) et uH(t) en fonction du temps.
2- Exprimer la valeur moyenne de u(t) en fonction de V et
3- Représenter les allures de iH(t) et iD(t) en fonction du temps.
4- Exprimer les valeurs moyennes des courants iH et iD en fonction de I et < iH > ou iHmoy = I ( I est considéré comme constante ) < iD > ou iDmoy = (1 - I 5- Déterminer l'intensité I du courant dans le moteur en fonction de V, E', Ra et < u > = E' + Ra.I = V I = ( V-E')/Ra
6- Application numérique< u > = 154 V, I = 9 A et < iD > = 2,7 A7- Relation liant la vitesse n du moteur (en tr/min) à pour E' = 0,153.nI = ( .V-E')/Ra or E' = 0,153.n n= ( .V- Ra.I)/0,153I = 9 A = constante car le moteur travaille à couple
constant d’où: n =1438. - 598- Tracer n en fonction de Deux points suffisent.
αT TV
Vu [V]
t [s]
t [s]
2T
αT T 2T
uH [V]
u(t)
uH (t)
0
0
<u> = umoy
umoy
= T1 u(t) dt = T
10
T
# V dt = TV
0
αT
# dt = TV
0
αT
# t[ ]
[αT-0]
0
αT
= TV = T
αT .V= α .V
αT T
I
I
t [s]
t [s]
2T
αT T 2T
iD [A]
iH [A]
iD (t)
iH (t)
0
0
0.04
n [tr/min]1379
1α

DU P
ROG
RAM
ME
CONT
ENU
OBJ
ECTI
FSDU
PRO
GRA
MM
E
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
I- Réseau triphasé équilibré
1- Tensions simples
2- Tensions composées
II- Récepteurs triphasés équilibrés
1- Couplage étoile : courants, tensions.
2- Couplage triangle : courants, tensions
3- Déphasage
4- Puissances : P, Q et S
5- Triangle de puissances
6- Mesure des puissances
a. Méthode d’un seul wattmètreb. Méthode de deux wattmètres
OS B21 – Déterminer les grandeurs électriques d’un réseau triphasé équilibré.
OS B22 – Déterminer les grandeurs électriques d’un récepteur triphasé équilibré.
OS B23 – Déterminer les puissances électriques mises en jeu dans un récepteur triphasé équilibré.

225
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
A. MISE EN SITUATION
Les photos ci-dessous représentent quatre systèmes techniques.
L’alimentation électrique de ces systèmes diffère. La machine à laver et le radiateur à bain d’huile sont des systèmes à usage domestique, ils sont branchés sur un réseau au mouen de deux fils conducteurs plus un fil de protection appelé fil de terre.
Le tour parallèle et le transformateur sont branchés sur un réseau à travers trois fils conducteurs plus un fil de terre.
D’après ces observations, on distingue deux types de réseaux électriques :le réseau monophasé disponible pour alimenter les appareils électriques à
usage domestique;le réseau triphasé utilisé dans le domaine industriel ainsi que dans le domaine
de production, de transport et de distribution d’énergie électrique.
Fig.1
Machineà laver
Tourparallèle
Radiateurà bain d’huile
Transformateurtriphasé
P roblématique: Quel est l’intérêt de l’utilisation du réseau triphasé ?Quelles sont ses caractéristiques ?Comment sont branchés les récepteurs sur ce type de réseau ?Quelles sont les grandeurs électriques mises en jeu ?

226
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
B. SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
I- Aperçu historiqueLe réseau triphasé a été inventé dans les années 1880 par
Galileo Ferraris. Ces travaux sur le courant monophasé lui ont permis de
démontrer qu’il est possible aussi d’obtenir un champ tournant crée par trois bobines identiques positionnées en arc de cercle et décalées entre elles de 120°.
En 1888 et 1891, Mikhaïl O. Dolivo-Dobrovolski invente le premier générateur de courant triphasé.
Au début du vingtième siècle, Nicolas Tesla a mis au point les
premiers alternateurs donnant naissance aux réseaux électriques de distribution en courant alternatif.
De nos jours, la production de l’énergie électrique sous forme triphasée est assurée par des centrales électriques.
II- Intérêt du réseau triphasé
La production de l’énergie électrique s’effectue en triphasé car, à puissances égales, une machine triphasée est plus économique qu'une machine monopha-sée (conception, masse de fer...).
Le transport de l’énergie électrique s’effectue en triphasé, car les pertes dans une ligne triphasée sont nettement inférieures à celles dans une ligne monopha-sée.
Galileo Ferraris(1847 – 1897)
Un ingénieur et un scientifique italien
(1861 – 1891) Un scientifique d’origine Russe
Mikhaïl O. Dolivo-Dobrovolski
Centrale hydraulique Sidi Salem Centrale thermique SousseFig.4

227
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
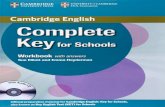
III- Réseau triphasé équilibré1- DéfinitionUn réseau triphasé équilibré est constitué de trois tensions sinusoïdales de même
fréquence, de même amplitude et qui sont déphasées de 120° l’une par rapport à l’autre.
2- Tensions simples La tension simple est la différence de potentiel entre une phase du réseau triphasé
et le neutre. Il existe trois tensions simples notées, en valeurs instantanées, par v1, v2 et v3.
Les tensions simples v1(t), v2(t) et v3(t) forment un système triphasé équilibré.
3- Tensions composéesLa tension composée est la différence de potentiel entre deux phases du réseau
triphasé. Il existe trois tensions composées notées, en valeurs instantanées, par u12, u23 et u31. Elles ont la même fréquence que les tensions simples.
Phase 1
Phase 2
Phase 3
Neutre N
v1 v2 v3
v1(t)= VM sin(ωt)2πv2(t)= VM.sin(ωt- )34πv3(t)= VM.sin(ωt- )3
Représentation temporelle Représentation vectorielle
2π3
2π3
2π3 1V
3V
2V
v1 v2 v3
0T3
2T3
T
2π3
2π3
t
VM=v. 2
Fig. 5
(Fresnel)
V1+V2+V3=0
L’application de la loi des mailles nous permet d’obtenir les relations suivantes:
⇒⇒⇒
Fig. 6

228
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
a. Représentation vectorielle (Fresnel)Relation entre les valeurs efficaces des tensions simples et composées.
Les tensions composées forment un système triphasé équilibré, elles sont en avance de par rapport aux tensions simples.
b. Représentation temporelle et équations
IV- Récepteur triphasé équilibré1- DéfinitionUn récepteur triphasé équilibré est constitué de trois dipôles identiques de même
impédance "Z". Le courant qui traverse chaque dipôle est noté par "j". Le courant qui circule dans les fils de ligne du réseau triphasé est appelé courant de ligne, il est noté par "i".
U2
= V.Cos(30°) ⇒ U = 2.V.Cos(30°)
U = 2.V. 32 = V.√√ 3
v
v30°
30°
30° V1
V3
V2
-V1
-V3
U12
U23
U31 -V2
Fig. 7√
3U=V.
t
v, uu12
v1 v2 v3
u23 u31UM
VM
En prenant v1(t) comme référence:
πu12(t)= UM.sin(ωt + )6
πUM.sin(ωt - )2
πu23(t)= UM.sin(ωt - + )=62π3
7πUM.sin(ωt - )6πu31(t)= UM.sin(ωt - + )=6
4π3
Fig. 8
i1L1i2L2i3L3
N
Réseau triphasé (3~) Récepteur triphasé
Zj1
Zj2
Zj3
Fig. 9

229
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
Pour pouvoir brancher ce récepteur au réseau, il faut tout d’abord relier les trois dipôles entre eux. Deux types de couplage sont possibles : le couplage étoile et le couplage triangle.
2- Couplage étoile a. Montage
Le même branchement représenté de deux façons différentes, le premier schéma confirme l’appellation "étoile". Le symbole de ce type de couplage est: (Y)
b. CourantsLes trois dipôles sont identiques, de même impédance et créent le même
déphasage " " entre le courant de ligne et la tension simple, de ce fait : i1 + i2 + i3 = 0
Donc le courant dans le fil de neutre est nul (iN = 0), ce qui permet de dire que le fil neutre n’est pas nécessaire pour brancher un récepteur triphasé équilibré au réseau.
Relations entre les courants :
D’après le deuxième schéma, on constate que les courants de ligne sont égaux aux courants par dipôle.
i1=j1, i2=j2 et i3=j3
Le récepteur triphasé ainsi que le réseau triphasé sont équilibrés, les valeurs efficaces des courants i et j sont égales.
Z
Z
Z
j1i1i1
L1
L1
j2i2L2
L2
j3i3
iN=0iN=0
L3
L3 NN
i2j2
j1
N
j3
i3Fig. 10
Couplage étoile
v3v2
v1
v1 v2 v3
(Y)
ϕ : angle de déphasage entre I et V
I1 = I2 = I3 = I = J1 = J2 = J3 = J =VZ
On retiendra pour le couplage étoile:
J = IFig. 11
On montre que: I1+I2+I3=0
I , V
V1
V3
V2
I1
I2
I3

230
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
c. Tensions :En couplage étoile, chaque dipôle est soumis à la tension simple du réseau
triphasé équilibré. Les relations entre les tensions sont celles établies lors de l’étude du réseau
triphasé équilibré. On retiendra pour le couplage étoile:
3- Couplage triangle a. Montage
Le branchement en triangle des trois dipôles peut être représenté de trois façons différentes:
Le premier schéma légitime l’appellation "triangle". Le symbole de ce type de couplage est:
b. Courants Les trois dipôles sont identiques et de même impédance, de ce fait :
i1 + i2 + i3 = 0 et j12 + j23 + j31 = 0
Relations entre les courants :En appliquant la loi des nœuds, on obtient, en valeurs instantanées, les relations
suivantes :j12 = i1+ j31 i1 = j12 - j31
j23 = i2+ j12 i2 = j23 - j12
j31 = i3+ j23 i3 = j31 - j23
Le récepteur triphasé est équilibré, on obtient, en valeurs efficaces, les relations suivantes:
√3V= U
u31
u23u23
u31
u23
u31
u12u12u12
i3
i2
i1
i2
i3
i1
i1
i2
i3
Fig. 12
J12= J23= J31=J= et I1= I2= I3=IVZ

231
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
Représentation vectorielle
c. TensionsCouplé en triangle, chaque dipôle est soumis à la tension composée du réseau
triphasé. De ce fait, on obtient :U12 = V1 ; U23 = V2 ; U31 = V3
En général :
4- Puissances mises en jeua. Théorème de Boucherot :
Les puissances active et réactive absorbées par un groupement de dipôles sont respectivement égales à la somme des puissances actives et réactives absorbées par chaque élément du groupement.
P = P1 + P2 + P3 ET Q = Q1 + Q2 +Q3
Pour un récepteur triphasé équilibré:
P = 3.P1
b. Puissance active absorbée Cas du couplage étoile :
Chaque dipôle du récepteur triphasé absorbe une puissance active P1 = V.I.cos . La puissance totale absorbée par le récepteur est:
U12
J12
J12
-J31
-J31
J23
J31
U23
U31
-I3
I1
I1
I2
⇒
⇒
⇒
Equations intantanées
Equations Vectorielles
ϕ
ϕ
: angle de déphasage entre U et J
J ,UI12
= J12.cos30° ⇒ I1 = 2.J12.cos30°
I1 = 2.J12.√32
= J12.√3
Dans le cas général:√3
J= I
Fig. 14
Fig. 13
V = U
P = 3.V.I.cosϕ = 3. U√3
√3 .I.cosϕ = .U.I.cosϕ

232
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
Cas du couplage triangleChaque dipôle du récepteur triphasé absorbe une puissance active P1 = U.J.cos .
La puissance totale absorbée par le récepteur est:
Quelque soit le couplage, la puissance active absorbée est:
c. Puissance réactive absorbéeQuelque soit le couplage, la puissance réactive absorbée est:
d. Puissance apparenteQuelque soit le couplage, la puissance apparente est:
5- Triangle de puissances
6- Pertes par effet joule dans un récepteur résistif triphasé équilibréa. Cas du couplage étoile
D’après le schéma, la résistance vue entre deux bornes du récepteur est équivalente à deux résistances (r + r) en série R=2.r
Pour chaque dipôle, la puissance dissipée par effet joule est Pj1= r.I2
P = 3.U.J.cosϕ= 3.U. I√3
√3.cos ϕ= .U.I.cosϕ
P = √3.U.I.cos ϕ
Q = √3.U.I.sin ϕ
S = .U.I
PQ
S - Facteur de puissance: Cos ϕ=
PS
- Relation entre les puissances S= P2 + Q2
Fig. 15
i1L1
L2
L3
i2
N
i3v3v2
v1 rP
Pour le récepteur triphasé
j = 3.Pj1 = 3.r.I2 = 3. 22 ..)( IR23I.
2R
=
23Pj= .R.I2
Fig. 16

233
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
b. Cas du couplage triangleOn ne considère que le terme résistif des impédances des dipôles. D’après le schéma ci-dessous, la résistance vue entre deux bornes du récepteur
est équivalente à une résistance "r" branchée en parallèle avec deux résistances (2r) en série.
V- Mesure des puissances en triphasé1- Appareil de mesure : le wattmètreLe wattmètre est l’appareil qui permet de mesurer la puissance active en monophasé
ou en triphasé. Il possède au moins quatre bornes. Deux bornes pour mesurer le courant (circuit intensité à brancher en série) et deux bornes pour mesurer la tension (circuit tension à brancher en parallèle).
2- Méthode d’un seul wattmètreDans le cas où le fil neutre est accessible, on utilise un seul wattmètre pour mesurer
la puissance active absorbée par le récepteur triphasé.
u23
u31
u12
i3
i2
i1
Fig. 17
r32
r2r2r.rR =
+=
Pour chaque dipôle, la puissance dissipée par effet joule est 2
j r.jP =1
Pj
Pj
= 3.Pj1 = 3.r.J2
= 3. 22 ..)3
.( IR23I.R
23
=
Pour le récepteur triphasé:
23Pj= .R.I2
r
r
r
Fig. 18Fig 18
Wi i
uCircuittension
Circuitintensité
Fig. 19
RécepteurTriphaséÉquilibré
WL1
L2
L3
N
i
v
P’
La puissance mesurée par le wattmètre est:
P’= V.I.cosϕ
Montage

234
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
La relation entre la puissance mesurée par le wattmètre et la puissance absorbée par le récepteur triphasé équilibré est: P = 3.P’
3- Méthode de deux wattmètresDans le cas où le fil neutre n’est pas accessible, on utilise deux wattmètres pour
mesurer la puissance active absorbée par le récepteur triphasé équilibré.
La puissance active absorbée par le récepteur est égale à la somme algébrique des deux puissances mesurées P1 et P2.
REMARQUESi l’un des deux wattmètres indique une puissance négative, on inverse sa polarité
en courant ou en tension. La puissance totale absorbée est alors la différence entre les deux puissances mesurées.
La puissance réactive absorbée par le récepteur est donnée par l’expression:
Câble triphasé
Fig. 20
RécepteurTriphaséÉquilibré
WL1
L2
L3
i1
i2
u23
u12
P1
P2
W
P= P1 + P2
Q= (P1-P2)3.

235
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
C. RÉSUMÉ

236
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
D. ÉVALUATION
I- Contrôle de connaissances1- Dans un réseau triphasé équilibré les trois tensions simples sont déphasées
l’une par à l’autre de:a. 30°b. 60°c. 120°
2- La tension simple est la différence de potentiel entre:a. deux phases du réseau triphaséb. entre une phase et le neutre
3- La tension composée est la différence de potentiel entre:a. deux phases du réseau triphaséb. entre une phase et le neutre
4- La relation entre la tension composée et la tension simple d’un réseau triphasé équilibré est :a. U = Vb. U = 2 .Vc. U = 3 .V
5- Un récepteur triphasé équilibré est composé de :a. trois dipôles non identiquesb. deux dipôles identiquesc. trois dipôles identiques
6- Chaque dipôle d’un récepteur triphasé équilibré couplé en étoile est :a. soumis à la tension simple du réseau triphasé et parcouru par le courant de ligne.b. soumis à la tension composée du réseau triphasé et parcouru par le courant par phase.
7- Les relations entre les grandeurs électriques dans le cas d’un couplage triangle sont :a. I = J et U = Vb. I = J. 3 et U = Vc. I = J et U = V
8- La puissance active absorbée par un récepteur triphasé équilibré est :a. P = U.I.cosb. P = 3.U.I.cosc. P = 3.U.I.sin

237
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
II- Exercices résolus
EXERCICE N°1Un récepteur triphasé équilibré est composé de trois enroulements identiques de
facteur de puissance cos =0,86. Ce récepteur couplé en étoile et branché au réseau triphasé U= 380V.
1- Déterminer la valeur de la tension aux bornes de chaque enroulement.2- Déterminer la valeur du courant traversant chaque enroulement si l’impédance
3- Déduire du résultat trouvé à la question (2) la valeur du courant en ligne.4- Représenter un schéma de branchement du récepteur au réseau et indiquer les
valeurs efficaces des tensions et des courants sur le schéma.5- Déterminer la puissance active absorbée par le récepteur triphasé.6- Montrer, par calcul, que la puissance active absorbée par le récepteur est trois
fois la puissance active absorbée par un enroulement : P = 3.P1.7- Déterminer la puissance réactive absorbée par le récepteur triphasé.8- Déterminer la puissance apparente du récepteur triphasé.9- Représenter le triangle des puissances.
On prendra une échelle de 1000W par cm et 1000 VAR par cm.
EXERCICE N°2Un récepteur triphasé équilibré composé de trois dipôles identiques est branché au
réseau triphasé U=400V. La plaque signalétique du récepteur indique que chaque dipôle doit être soumis à la tension 400V.
1- Quel est le couplage des dipôles du récepteur ? Justifier votre réponse.2- Déterminer la valeur du courant traversant chaque dipôle si son impédance est
3- Représenter, à l’échelle, les vecteurs de Fresnel des courants en ligne et ceux des courants par phase. On prendra une échelle de 4A/cm.
4- Représenter un schéma de branchement du récepteur au réseau et indiquer les valeurs efficaces des tensions et des courants sur le schéma.
5- Déterminer les valeurs des puissances P, Q et S si l’angle de déphasage du cou-rant par rapport à la tension est = 60°.
6- On se propose de mesurer la puissance active absorbée par le récepteur. Quelle méthode de mesure doit-on adopter ? Justifier votre réponse.
7- Représenter un schéma électrique de la solution.
EXERCICE N°3Sur la plaque signalétique d’un moteur triphasé, on lit les indications suivantes :U = 400V ; (Y) ; 50Hz ; cos = 0,78 Ce moteur est branché sur le réseau triphasé U = 400V. La mesure de la puissance
par la méthode d’un seul wattmètre a donné une puissance absorbée par une phase P1 = 1100W.

238
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
1- Déterminer la puissance active absorbée par le moteur.2- Déterminer le courant en ligne. En déduire le courant par enroulement.3- Déterminer l’impédance "Z" d’un enroulement du moteur.4- Déterminer la puissance apparente et la puissance réactive absorbées par le
moteur.
III- Exercices à résoudre
EXERCICE N°1Un four thermique composé de trois dipôles résistifs identiques couplés en étoile et
branchés à un réseau triphasé équilibré 230/400V. 1- Représenter un schéma de branchement du four sur le réseau.2- -
duire la valeur du courant traversant chaque dipôle.3- Déterminer la puissance active absorbée par le four. En déduire la valeur de la
puissance apparente.4- Que peut-on dire de la puissance réactive ? Justifier.
EXERCICE N°2Un moteur triphasé composé de trois enroulements identiques couplés en triangle.Le moteur est branché au réseau 230/400V. La mesure des puissances a donné
les résultats suivants P1 = 900W, P2 = 500W.1- Déterminer la puissance active et la puissance réactive absorbées par le moteur.2- Déterminer le facteur de puissance.3- Déterminer le courant en ligne.4- Déterminer le courant par enroulement.5- Déterminer l’impédance d’un enroulement.
EXERCICE N°3Une installation électrique alimentée par un réseau triphasé U = 400V est composée
de (d’) :trente lampes (cos =1) réparties de façon à équilibrer les trois phases. Chaque
lampe absorbe une puissance de 200W ;trois machines outils dont chacune est équipée d’un moteur triphasé absorbant
une puissance active de 330W et une puissance réactive de 290VAR;un four électrique composé de trois résistances chauffantes (cos =1) absor-
bant chacune une puissance de 400W.1- Déterminer la puissance active et la puissance réactive absorbées par les trois
machines outils.2- Déterminer le courant en ligne (IM) à l’entrée de la dérivation des trois moteurs.3- Déterminer le facteur de puissance (cos M) correspondant aux trois machines.4- Déterminer la puissance active totale absorbée par l’installation électrique.5- Déterminer le courant en ligne à l’entrée de l’installation électrique.6- Déterminer le facteur de puissance de l’installation électrique (cos T).

239
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
EXERCICE N°4Un récepteur triphasé équilibré composé de trois bobines identiques dont
branchées au réseau triphasé U = 400V. Le facteur de puissance cos = 0,85.1- Quelle est la valeur de la tension aux bornes de chaque bobine.2- Déterminer la valeur du courant traversant chaque bobine.3- Déduire la valeur du courant en ligne.4- Représenter un schéma de branchement du récepteur au réseau et indiquer les
valeurs efficaces des tensions et des courants sur le schéma.5- Déterminer la puissance active absorbée par le récepteur triphasé.6- Déterminer la puissance réactive absorbée par le récepteur triphasé.7- En déduire la puissance apparente du récepteur triphasé.8- Représenter, à une échelle convenable, le triangle de puissances. On prendra
une échelle de 2000 (W, VAR et VA) par cm.
EXERCICE N°5 Un récepteur triphasé équilibré composé de trois dipôles identiques est branché au
réseau triphasé U = 400V. En fonctionnement normal, chaque dipôle doit être soumis à la tension 230V.
1- Indiquer le couplage de ces trois dipôles.2- Déterminer la valeur du courant traversant chaque dipôle si l’impédance de
3- En déduire la valeur du courant en ligne.4- Représenter un schéma de branchement du récepteur au réseau et indiquer les
valeurs efficaces des tensions et des courants sur le schéma.5- Déterminer les valeurs des puissances P, Q et S si l’angle de déphasage du
courant par rapport à la tension est = 60°.6- On se propose de mesurer la puissance active absorbée par le récepteur.
Quelle méthode de mesure doit-on adopter ? Justifier votre réponse.7- Représenter un schéma électrique de la solution.
EXERCICE N°6 Une installation électrique alimentée par un réseau triphasé équilibré 230/400V est
composé de trois récepteurs triphasés équilibrés :un moteur triphasé "M1" : P1 = 1,5KW, cos 1 = 0,83un moteur triphasé "M2" : P2 = 5KW, cos 2 = 0,86.un transformateur triphasé : P3 = 0,8KW, cos 3 = 0,75.
1- Déterminer le courant de ligne absorbé par chaque récepteur.2- Déterminer le courant en ligne lorsque les trois récepteurs fonctionnent en
même temps.3- Déterminer la puissance active totale absorbée par l’installation électrique.4- Déterminer le facteur de puissance de l’installation électrique.

240
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
IV- Correction des exercices
EXERCICE N°1
10,96 A1
23N
i2
10,96 A
N
i3
219.39 V
219.39 V
380 V
P
QS
Ech:1000 W par cm
1000 VAR par cm

241
SYSTÈMES TRIPHASÉS ÉQUILIBRÉS
EXERCICE N°2
EXERCICE N°3
1- Le couplage est triangle car chaque dipôle doit être branché entre deux phases du réseau et soumis à la tension composée U= 400 V.
2-
3- Représentation vectorielle (de Fresnel)
7- Montage
6- Pour mesurer la puissance active absorbée par le récepteur, on applique la méthode des deux wattmètres car le neutre n’est pas accessible lorsque le couplage est en triangle.
4- Schéma de branchement
I1
I3
I2
5-
W
W
-
-
-
-

DU P
ROG
RAM
ME
CONT
ENU
OBJ
ECTI
FSDU
PRO
GRA
MM
E
MOTEURS ASYNCHRONES TRIPHASÉS
MOTEURS ASYNCHRONES TRIPHASÉS I- Présentation1- Constitution2- Principe de fonctionnement3- Couplage des enroulements4- Inversion du sens de rotation
II- Bilan énergétique et rendement
III- Caractéristiques Tu(n) et I(n)
IV- Point de fonctionnement
V- Commande et protection1- Démarrage direct
a. Un seul sens de rotationCircuit de puissanceCircuit de commande
b. Deux sens de rotation Circuit de puissanceCircuit de commande
2- Démarrage étoile-triangle dans un seul sens de rota-tion.
OS B31 – Identi
OS B32 – Etabli
OS B33 s.
OS B34
OS B35
OS B35

243
MOTEURS ASYNCHRONES TRIPHASÉS
MOTEURS ASYNCHRONES TRIPHASÉS
A. MISE EN SITUATION
Les photos ci-dessous représentent deux systèmes techniques :
La photo 1 représente une meuleuse portative et légère, permettant de tronçonner et polir des carreaux en marbre. L'élément essentiel équipant cette dernière n'est autre qu'un moteur électrique.
La photo 2 représente une machine de découpe de blocs de marbre elle aussi est constituée essentiellement d'un moteur électrique pour entrainer le disque en rotation.
Le moteur électrique équipant la meuleuse est alimenté par un réseau alternatif monophasé. Il est appelé moteur asynchrone monophasé.
Le moteur électrique équipant la machine de découpe de blocs de marbre est beaucoup plus puissant que celui de la meuleuse. Il est alimenté par un réseau alternatif triphasé et appelé moteur asynchrone triphasé.
Les moteurs asynchrones triphasés cumulent de multiples avantages : ils sont simples, robustes et faciles d'entretien. Toutes ces raisons légitiment leur popularité en milieu industriel.
Leurs applications sont nombreuses. On les retrouve, par exemple dans:les pompes;les convoyeurs;les élévateurs;les palans; les machines outils; etc...

244
MOTEURS ASYNCHRONES TRIPHASÉS
Leur puissance varie d'une fraction de KW à plusieurs centaines de KW.À puissance égale, le moteur asynchrone triphasé est moins volumineux que son
homologue monophasé. Par ailleurs son rendement et son facteur de puissance sont aussi meilleurs.
On distingue deux types de moteurs asynchrones triphasés : le moteur asynchrone triphasé à rotor en court-circuit ou à cage d’écureuil
utilisé pour les machines industrielles de faible puissance ;le moteur asynchrone triphasé à rotor bobiné ou à bagues utilisé pour les
machines industrielles de forte puissance.Dans la suite de ce chapitre, on s’intéressera à l’étude des moteurs asynchrones
triphasés à rotor en court-circuit.
B. MOTEURS ASYNCHRONES TRIPHASÉS
I- La paternité de la machine asynchrone est controversée.
Elle pourrait être attribuée à trois inventeurs :en 1887, Nikola Tesla dépose un brevet sur la machine
asynchrone, puis en Mai de l'année suivante cinq autres brevets. Son nom a été donné au tesla (symbole : T) qui est l’unité d’induction magnétique du système internatio-nal d'unités.
en 1885, Galileo Ferraris publie ses travaux sur les machines tournantes, avec une expérimentation puis une théorie sur le moteur asynchrone en 1888.
en 1889, Mikhaïl Dolivo-Dobrovolski, électricien allemand d'origine russe, invente le premier moteur asynchrone à courant triphasé à cage d'écureuil qui sera construit industriellement à partir de 1891.
P roblématique: Comment un moteur asynchrone triphasé transforme-t-il l’énergie
électrique en énergie mécanique de rotation?Quelles sont les puissances mises en jeu dans un moteur asynchrone
triphasé en fonctionnement ?Comment brancher un tel moteur au réseau triphasé ? comment
inverser son sens de rotation? et comment le démarrer en toute sécurité?
Comment déterminer le point de fonctionnement d'un tel moteur ?Comment choisir le moteur adéquat pour une application donnée?

245
MOTEURS ASYNCHRONES TRIPHASÉS
II- Présentation1- Constitution
Le moteur asynchrone triphasé est principalement constitué de deux parties :une partie fixe appelée stator ;une partie mobile appelée rotor.
a. Le statorLe stator est un électro aimant constitué d’un circuit magnétique en tôles feuilletées.Les tôles sont munies d’encoches dans lesquelles prennent place les enroulements
statoriques destinés à produire le champ tournant (trois enroulements dans le cas d’un moteur triphasé).
roulement
roulement
flasque palier
rotor stator
ventilateur
capot de ventilation
flasque palierboîte de raccordement
enroulement statorique
VUE ÉCLATÉE D’UN MOTEUR ASYNCHRONE TRIPHASÉ
Fig.3

246
MOTEURS ASYNCHRONES TRIPHASÉS
Chaque enroulement est constitué de plusieurs bobines. Le mode de couplage de ces bobines entre elles définit le nombre de paires de
pôles du moteur, donc la vitesse de rotation.
b. RotorC’est l’élément mobile du moteur. Comme le circuit magnétique du stator, il est
constitué d’un empilage de tôles minces, isolées entre elles, et formant un cylindre claveté sur l’arbre du moteur.
Cet élément, de part sa technologie, permet de distinguer deux familles de moteurs asynchrones : ceux dont le rotor est en court-circuit, dits à "cage" et ceux dont le rotor est bobiné, dits "à bagues".
ROTOR À CAGE D'ÉCUREUILLe rotor est un cylindre en fer comportant sur sa périphérie des conducteurs en
aluminium, moulés sous pression dans des canaux et reliés entre eux par des anneaux moulés aussi aux deux extrémités du rotor. Cet ensemble conducteur en aluminium est appelé cage d'écureuil.
Il n'y a aucun contact électrique entre le rotor et l'extérieur.
Fig.5 Fig.6
balais
bagues
Rotor à cage ou en court-circuit Rotor bobiné ou à bagues
Barre de cuivreou d’aluminium
Anneau decourt-circuit
Rotor en court-circuit (à cage d’écureuil) Fig. 7

247
MOTEURS ASYNCHRONES TRIPHASÉS
2- Principe de fonctionnement a. Champ magnétique tournant
Faisant tourner un aimant en forme de
"U" autour d’un axe vertical par un procédé mécanique simple. On constate que le disque métallique placé en dessous de l’aimant tourne dans le même sens à une vitesse légèrement inférieure à celle de l’aimant.
La rotation de l’aimant a provoqué la création d’un champ magnétique tournant.
b. Principe de fonctionnement du moteur asynchroneRemplaçons l’aimant par trois bobines identiques placées à 120° géométrique l’une
par rapport à l’autre et branchons les au réseau triphasé. On constate que le disque métallique placé au centre O de ces trois bobines
commence à tourner spontanément. Cette rotation est due à un champ magnétique tournant crée par ces trois bobines lorsqu'elles sont alimentées (fig. 9).
Si on remplace le disque par une aiguille aimantée, on constate que l'aiguille tourne un peu plus vite que le disque. On dit que la rotation du disque est asynchrone. D'où le nom moteur asynchrone triphasé.
SS
N S
Fig. 8
Disque métallique
L2L1 L3
o
Fig. 9

248
MOTEURS ASYNCHRONES TRIPHASÉS
3- DéfinitionUn moteur électrique est un système électromagnétique permettant de convertir
l'énergie électrique en énergie mécanique de rotation.
4- La vitesse de rotation du champ tournant crée par les trois bobines est désignée
par n et exprimée en tours par seconde. Si on branche ces trois bobines sur un réseau triphasé de fréquence 50Hz:
La vitesse du champ tournant est de 50 tours par seconde dans le cas où le stator est composée de trois bobines décalées de 120° entres elles (fig.11);
Alors que si les trois bobines sont divisées en deux demi-bobines et si elles sont placées l'une en face de l'autre (fig12), le champ magnétique effectue alors 25 tours par seconde soit (f/2);
Si on divise encore chaque bobine en trois parties égales la vitesse devient (50/3 tours par seconde soit (f/3)).
a. Constatations
La figure 11 représente le schéma d'un moteur bipolaire :son stator produit deux pôles quand les trois bobines sont alimentées;
La figure 12 représente le schéma d'un moteur tétrapolaire :son stator produit quatre pôles quand les trois bobines sont alimentées (chaque bobine est compo-sées de deux demi-bobines).
Énergie électrique Énergie
mécanique
Fig. 10
Fig. 11 Fig. 12
moteur bipolaire moteur tétrapolaire

249
MOTEURS ASYNCHRONES TRIPHASÉS
b. GénéralisationLa vitesse de synchronisme des moteurs asynchrones triphasés est proportion-
nelle à la fréquence du courant d’alimentation et inversement proportionnelle au nombre de paires de pôles constituant le stator.
La vitesse angulaire du champ tournant est désignée par S (pulsation angulaire de synchronisme ou vitesse angulaire de synchronisme). Son expression est :
La vitesse de rotation du rotor est désignée par n. Elle est légèrement inférieure à ns (n < nS).
s).
Alimentés en 50 Hz, les moteurs asynchrones ne peuvent tourner qu'à des vitesses "légèrement inférieures" aux valeurs suivantes, déterminées par le nombre de pôles du bobinage du stator :
Nombre de pôles P Vitesse ns en (tr/s) Vitesse ns en (tr/min)2 pôles (bipolaire) 1 50 30004 pôles (tétrapolaire) 2 25 15006 pôles (hexapolaire) 3 16,67 10008 pôles (octopolaire) 4 12,5 750
5- GlissementLe rotor du moteur asynchrone triphasé tourne à une vitesse légèrement inférieure
à celle du champ tournant crée par les bobines du stator. On dit que le rotor 'glisse' par rapport au champ tournant.
Le glissement est définit par l’écart relatif entre la vitesse du rotor et la vitesse du champ tournant. Il dépend de la charge mécanique accouplée à l’arbre du moteur.
ns = fp
f : fréquence en Hertzp : nombre de paires de pôles du statorn : vitesse de rotation du champ tournant ou vitesse de synchronisme en tours par seconde (tr/s)
nS : vitesse de synchronisme (tr/s)ΩS : vitesse angulaire (rad/s) ΩS = 2.π.nS
g ns - nns
=Ωs -Ω
Ωs=
g : glissement exprimé en (%)ns : vitesse de synchronisme (tr/sec)Ωs: vitesse angulaire synchrone (rad/s)n: vitesse de rotation, appelée aussi fréquence de rotation.

250
MOTEURS ASYNCHRONES TRIPHASÉS
6- a. Couplage des enroulements
Les trois enroulements du stator sont identiques et forment un récepteur triphasé équilibré. Ils sont couplés soit en étoile soit en triangle par liaisons électriques effectuées sur la plaque à bornes du moteur au moyen de barrettes en cuivre.
Les extrémités des enroulements du stator sont reliées successivement aux bornes (U1, U2), (V1, V2) et (W1, W2) de la plaque à bornes (figure 13).
NB: Certaines plaques à bornes utilisent l'ancienne nomination à savoir (U, X), (V, Y) et (W, Z).
Couplage étoileAinsi couplés, chaque enroulement est soumis à la tension simple du réseau
triphasé.
Couplage triangleAinsi couplés, chaque enroulement est soumis à la tension composée du réseau
triphasé.
Fig. 13: Plaque à bornes des enroulements statoriques
U1
U2 V2
V1 W1
W2
Fig. 14Couplage en étoile
des enroulements statoriquesCouplage en étoile (Y)
des enroulements statoriques
L1 L2 L3
U1 V1 W1
W2 U2 V2
L1 L2 L3
U
V
V1
W1
W2
V2U2
U1
Plaque à bornes
Fig. 15Couplage en triangle
des enroulements statoriquesCouplage en triangle (∆)
des enroulements statoriques
L1 L2 L3
U
U
V1
W1W2
V2
U2
U1
L1 L2 L3
U1 V1 W1
W2 U2 V2
Plaque à bornes